CN103776099A - 空调机 - Google Patents
空调机 Download PDFInfo
- Publication number
- CN103776099A CN103776099A CN201310369724.9A CN201310369724A CN103776099A CN 103776099 A CN103776099 A CN 103776099A CN 201310369724 A CN201310369724 A CN 201310369724A CN 103776099 A CN103776099 A CN 103776099A
- Authority
- CN
- China
- Prior art keywords
- people
- room
- mentioned
- region
- indoor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Abstract
本发明提供一种空调机,其通过缩短摄像时间,适当地检测房间里的人的位置并反映到空调控制。本发明的空调机具备在左右方向上往复且对设有室内机的室内进行摄像的摄像机构、根据从摄像机构在每个规定时间输入的图像信息检测人体的位置的人体检测机构、根据由人体检测机构检测的人体位置推定房间里的人的位置的房间里的人位置推定机构、根据由房间里的人位置推定机构推定的房间里的人的位置改变空调控制的空调控制改变机构,房间里的人位置推定机构作为用于第二次室内的房间里的人的位置推定的左区域的图像信息,使用用于第一次室内的房间里的人的位置推定的摄像机构所摄的左区域的图像信息。
Description
技术领域
本发明涉及具备摄像机构的空调机。
背景技术
已知有检测设置室内机的室内的房间里的人,将其检测结果反映在空调控制上的空调机。
例如,在专利文献1中记载了使用从室内机摄像机输入的脸图像检测房间里的人的性别、年龄层、以及体型,并将其检测结果反映在空调控制上的空调机。
现有技术文献
专利文献1:日本特开2010-25359号公报
发明内容
但是,在专利文献1记载的技术中,未考虑摄像时间的缩短。通过缩短摄像时间,能够顺畅地进行人体的位置推定,反映为适当的空调控制。因此,本发明的课题在于提供通过缩短摄像时间,适当地检测房间里的人的位置并反映到空调控制的空调机。
为了解决上述课题,本发明的空调机具备在左右方向上往复且对设有室内机的室内进行摄像的摄像机构、根据从摄像机构在每个规定时间输入的图像信息检测人体的位置的人体检测机构、根据由人体检测机构检测的人体位置推定房间里的人的位置的房间里的人位置推定机构、根据由房间里的人位置推定机构推定的房间里的人的位置改变空调控制的空调控制改变机构,房间里的人位置推定机构使摄像机构在左右方向上转动,根据按照右区域、中央区域、左区域的顺序对各个区域计算的房间里的人的位置信息,推定第一次室内的房间里的人的位置,之后,使摄像机构在左右方向上转动,根据按照左区域、中央区域、右区域的顺序对各个区域计算的房间里的人的位置信息,推定第二次室内的房间里的人的位置,作为用于第二次室内的房间里的人的位置推定的左区域的图像信息,使用用于第一次室内的房间里的人的位置推定的摄像机构所摄的左区域的图像信息。本发明的其他方式在后述的实施方式中进行说明。
本发明的效果如下。
根据本发明,能够提供通过缩短摄像时间,适当地检测房间里的人的位置并反映到空调控制的空调机。
附图说明
图1是本发明的一个实施方式的空调机的室内机、室外机及遥控的主视图。
图2是室内机的侧剖视图。
图3是包括空调机的控制机构的结构图。
图4是由摄像机构进行摄像的区域的说明图,(a)是上下方向的摄像区域的说明图(侧视图),(b)是左右方向的摄像区域的说明图(俯视图)。
图5是表示控制机构执行的空调控制处理的概要的说明图。
图6是表示控制机构进行的处理的流程的流程图。
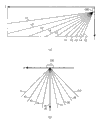
图7是坐标转换处理的说明图,(a)是表示光轴与垂直面的关系的说明图,(b)是表示在图像上所摄的图像与位于实际空间的房间里的人的关系的说明图,(c)是表示从透镜的焦点到脸中心的距离与视场角的关系的说明图。
图8是表示房间里的人的移动速度与活动量的关系的图表。
图9(a)是使用了人体的检测结果的移动轨迹推定处理的说明图,(b)是表示(a)场合的移动轨迹推定处理的结果的说明图。
图10(a)是使用了人体的检测结果的移动轨迹推定处理的另一说明图,(b)是表示(a)场合的移动轨迹推定处理的结果的说明图。
图11是根据活动量的分布的风向控制的说明图,(a)是上下方向的风向控制的说明图,(b)是左右方向的风向控制的说明图。
图中:A—空调机,100—室内机,103—送风风扇,103a—送风风扇驱动部,104—左右风向板,104a—左右风向板驱动部,105—上下风向板,105a—上下风向板驱动部,120—摄像机构,120a—焦点,130—控制机构,131—人体检测部(人体检测机构),132—坐标转换部,133—移动距离计算部,134—活动量计算部,135—移动轨迹推定部(移动轨迹推定机构),136—体感温度推定部,137—驱动控制部(空调控制改变机构),140—存储机构。
具体实施方式
适当参照附图详细地说明用于实施本发明的方式(以下称为实施方式)。
图1是本实施方式的空调机的室内机、室外机及遥控的主视图。如图1所示,空调机A具备室内机100、室外机200、遥控Re。室内机100与室外机200通过制冷剂配管(未图示)连接,利用周知的制冷剂循环对设有室内机100的室内(被空气调节空间)进行空气调节。另外,室内机100与室外机200通过通信电缆(未图示)互相收发信息。
遥控Re由用户操作,根据该操作,相对于室内机100的遥控接收部Q发送红外线信号。该信号的内容是运转要求、设定温度的改变、定时、运转模式的改变、停止要求等指令。空调机A根据这些信号进行冷房模式、暖房模式、除湿模式等空气调节运转。
摄像机构120位于室内机100的左右方向中央,向外部露出。另外,摄像机构120的详细结构将于后述。
图2是室内机的侧剖视图。机箱基体101收放室内热交换器102、送风风扇103、过滤器108等内部结构体。另外,前面板106以覆盖室内机100的前面的方式设置。
室内热交换器102具有多个导热管102a,通过使利用送风风扇103吸入室内机100的空气与在导热管102a中流通的制冷剂进行热交换,进行加热或冷却。另外,导热管102a与上述制冷剂配管(未图示)连通,构成周知的加热泵循环(未图示)的一部分。
送风风扇103通过设置在一端侧的送风风扇驱动部103a(参照图3)进行驱动而旋转,一边向室内机100吸入室内空气一边送风。
左右风向板104以设在下部的转动轴(未图示)为支点,利用左右风向板驱动部104a(参照图3)进行转动。
上下风向板105以设在两端部的转动轴(未图示)为支点,利用上下风向板驱动部105a(参照图3)转动。
另外,上述送风风扇驱动部103a、左右风向板驱动部104a、以及上下风向板驱动部105a根据来自驱动控制部137(参照图3)的指令进行驱动。
摄像机构120是对设有室内机100的室内进行摄像的装置,例如是CCD(Charge Coupled Device)摄像机。如图2所示,摄像机构120设置在比接水皿110靠下方且沿左右方向延伸的固定部111上。
另外,摄像机构120设置为透镜(未图示)的光轴P(参照图7(a))相对于水平面以俯角ε(参照图7(a))朝向下方,能够适当地对设有室内机100的室内进行摄像。
通过图2所示的送风风扇103旋转,通过空气吸入口107及过滤器108吸入室内空气,将在室内热交换器102中进行热交换的空气导向吹出风道109。并且,被导向吹出风道109a的空气利用左右风向板104及上下风向板105调整风向,从空气吹出口109b向外部送出,从而对室内进行空气调节。
图3是包括空调机的控制机构的结构图。控制机构130根据从摄像机构120输入的图像信息、从各种传感器(未图示)输入的传感器信号等对空调机A的动作进行总体控制。
存储机构140包括例如ROM(Read Only Memory)、RAM(Random AccessMemory)等。并且,存储在ROM中的程序由控制机构130的CPU(CentralProcessing Unit)读取并展开在RAM中,从而执行各种处理。
送风风扇驱动部103a是根据来自驱动机构130的指令,以规定旋转速度使送风风扇103旋转的马达。左右风向板驱动部104a是根据来自控制机构130的指令使左右风向板104(参照图2)在左右方向上转动的马达。上下风向板驱动部105a是根据来自控制机构130的指令使上下风向板105(参照图2)在上下方向上转动的马达。
另外,作为由控制机构130控制的对象,具有使摄像机构120在左右方向上转动的摄像机构驱动部(未图示)、驱动压缩机(未图示)的马达(未图示)、显示运转状态的显示灯(未图示)等。
如图3所示,控制机构130具备人体检测部131、坐标转换部132、移动距离计算部133、活动量计算部134、移动轨迹推定部135、体感温度推定部136以及驱动控制部137。
人体检测部131根据从摄像机构120在每个规定时间输入的图像信息检测人体的位置,将其检测结果输出到坐标转换部132。并且,上述检测结果含有检测的各个人体的脸中心的坐标(画面上的坐标)、脸的大小(在画面上的纵向的长度)。
坐标转换部132根据上述人体检测结果,以摄像画面的像素数从特定的画面上的坐标系转换为实际空间坐标系,并输出到移动距离计算部133。并且,从坐标转换部132输出到移动距离计算部133的信息中含有人体中心的X、Y、Z坐标值。
移动距离计算部133对根据从坐标转换部132输入的各人体的位置、过去(例如1sec前)算出的人体的位置假定的全部的组合计算移动速度,分别标注识别记号并输出到活动量计算部134。
活动量计算部134根据由移动距离计算部133计算的各移动距离计算活动量。另外,所谓“活动量”,表示人体的每单位面积的代谢量[W/m2],与人体的移动速度为正相关。活动量计算部134使计算出的活动量与上述识别记号对应,并输出到移动轨迹推定部135及体感温度推定部136。
移动轨迹推定部135对根据由人体检测部131这次检测的人体位置与过去检测的人体位置的组合比较分别对应的活动量,根据该比较结果推定人体的移动轨迹。
并且,移动轨迹推定部135将推定的移动轨迹反映为各人体的活动量,使该活动量与各人体的现在位置对应并输出到驱动控制部137。
体感温度推定部136根据从活动量计算部134输入的信息、从各种传感器输入的传感器信号推定体感温度的平均值,并输出到驱动控制部137。并且,体感温度的平均值是使空调室内的各房间里的人的体感温度平均的值。
另外,与上述各种传感器信号对应的信息例如是由室内温度传感器(未图示)检测的室内温度、由湿度传感器(未图示)检测的室内湿度。
驱动控制部137根据从移动轨迹推定部135输入的信息(即在空调室内的活动量的分布)与从体感温度推定部136输入的体感温度的平均值及上述传感器信号改变空调控制的参数。
另外,“空调控制的参数”包括送风风扇103的旋转速度、左右风向板104的转动角度以及上下风向板105的转动角度。如图3所示,根据从驱动控制部137输入的指令信号,送风风扇驱动部103a、左右风向板驱动部104a以及上下风向板驱动部105a分别进行驱动。
图4(a)是由摄像机构所摄的上下方向的摄像区域的说明图(侧视图)。如图4(a)所示,以通过摄像机构120具有的透镜(未图示)的焦点120a,并与设有室内机100的壁面W垂直的直线(室内侧为正)为Z轴。另外,使从室内机100的背面到透镜的焦点120a的距离为Δd。
另外,以通过位于比透镜的焦点120a以距离Δd靠后方的原点O并与水平面垂直的直线(室内机100的下侧为正)为Y轴。
摄像机构120设置为透镜的光轴从水平面以俯角ε(参照图7(a))朝向下方。另外,在侧视中以扇状扩展的摄像机构120的视野的上端与上述Z轴大致一致。
在本实施方式中,利用通过透镜(未图示)的焦点120a的水平面、通过焦点120a并且相对于水平面具有规定的斜率的四个假想平面a1、a2、a3、a4、a5将摄像区域在上下方向上5分割。
即,使由水平面与假想平面a1夹住的区域为A1,使由假想平面an与假想平面a(n+1)夹住的区域为A(n+1)(但是,n=1,···,4)。
另外,上述区域A1,···,A5在驱动控制部137根据人体的检测结果等控制上下风向板105的角度时使用。
图4(b)是由摄像机构所摄的左右方向的摄像区域的说明图(俯视图)。另外,在图4(b)中,省略室内机100。
以通过上述原点O,与Y轴及Z轴垂直的直线(朝向室内机100左侧为正)为X轴。
摄像机构120的视野角例如是俯视60°。摄像机构130通过驱动上述摄像机构驱动部(未图示),使摄像机构120绕转动轴(未图示)在左右方向上往复。即,控制机构130以在每个规定时间(例如30sec)按照左→中央→右→中央→左···的顺序使摄像机构120往复。
在本实施方式中,利用与X轴垂直,相对于包括Z轴的平面具有规定的斜率的十个假想平面b1,···,b10将摄像区域在左右方向上10分割。即,使由假想平面b(n-1)与假想平面b(n)夹住的区域为Bn(但是,n=1,···,10)。
另外,区域B1,···,B10在驱动控制部137根据人体的检测结果控制左右风向板104的角度时使用。
就在俯视中扩展为扇形的区域B1,···,B10而言,各个扇形的中心角θ2例如是15°。
如图4(b)所示,左区域由区域B1,···B4构成。该左区域是由摄像机构120所摄的三个区域中朝向室内机100左侧的区域。另外,区域B1,···,B4的中心角θ2的合计(15°×4=60°)与摄像机构120的视野角相等。
中央区域由区域B4,···,B7构成。该中央区域是由摄像机构120所摄的三个区域中位于中央的区域。并且,区域B4属于左区域,并且也属于中央区域。这样,通过使位于左区域的右端的区域B4与位于中央区域的左端的区域B4共通,防止人体的检测遗漏等。
右区域由区域B7,···,B10构成。基于与上述区域B4相同的理由,区域B7属于中央区域,并且也属于右区域。
通过利用摄像机构120以左区域→中央区域→右区域(或其相反顺序)的顺序依次摄像,能够对空调室内在俯视中角度为θ1(例如150°)的区域进行摄像。
并且,利用上述在上下方向上连接的区域A1,···,A5与在左右方向上连接的区域B1,···,B10,假想将空调室内分割为50(=5×10)个区域。控制机构130根据这50个区域的活动量的分布,调整左右风向板104及上下风向板105的角度。
图5是表示控制机构执行的空调控制处理的概要的说明图。图5所示的时刻t0是根据人体检测的空调控制的开始时刻。另外,图5以时间随着从左向右而经过的方式记载。
如上所述,控制机构130通过使摄像机构120往复,以左区域→中央区域→右区域→中央区域→左区域→···的方式依次对空调室内进行摄像(参照摄像区域G1)。
当在时刻t0开始空调控制时,控制机构130例如在每个1sec对左区域(区域B1,···,B4:参照图4(b))进行30次摄像。并且,使用该摄像结果计算左区域的房间里的人的人数、位置及活动量,并存储在存储机构140中(区域判断α1L:参照符号G2)。
接着,在时刻t1,控制机构130使摄像机构120向右转动,例如在每个1sec对中央区域(区域B4,···,B7:参照图4(b))进行30次摄像。并且,使用该摄像结果计算中央区域的房间里的人的人数、位置及活动量,并存储在存储机构140(区间判断α1M:参照符号G2)。
接着,在时刻t2,控制机构130使摄像机构120进一步向右转动,例如在每个1sec对右区域(区域B7,···,B10:参照图4(b))进行30次摄像,计算右区域的房间里的人的人数、位置及活动量,并存储在存储机构140(区间判断α1R:参照符号G2)。
这样,控制机构130使摄像机构120向右转动,依次对左、中央、右区域进行摄像,使用由摄像所得的图像信息计算位于各区域的人体的活动量等(第一次摄像:参照符号G3)。
另外,控制机构130从存储机构140读取对左、中央、右区域的各个计算的房间里的人的人数、位置及活动量,计算位于空调室内的全部房间里的人的人数、位置及活动量(最终判断β1:参照符号G4)。另外,人体检测处理等详细情况将于后述。
另外,控制机构130直到第一次检测处理结束,以全部宽度使左右风向板104及上下风向板105转动(参照符号G6、G7)。
当第一次摄像(左、中央、右区域)结束时,控制机构130根据检测的房间里的人的人数使显示灯(未图示)亮灯(参照符号G5)。例如,控制机构130当房间里的人为一个人时使配置在室内机100的规定部位的三个显示灯(未图示)中的一个显示灯亮灯,在2~3人的场合使两个显示灯亮灯,在4人以上的场合使三个灯亮灯。
由此,用户(即房间里的人)能够容易地确认控制机构130适当地检测出了房间里的人。
另外,控制机构130根据第一次处理结果更新控制左右风向板104(参照符号G6)及上下风向板105(参照符号G7)时的参数,控制各自的风向。另外,在图5中省略,但控制机构130也根据第一次处理结果控制送风风扇103的旋转速度。
并且,在进行根据第一次人体检测处理的风向控制的状态下,控制机构130在时刻t3~t5执行第二次人体检测处理。在进行第二次人体检测处理时,控制机构130使摄像机构120向左转动,依次对右、中央、左区域进行摄像(参照符号G3)。
在此,第二次最初摄像的右区域的图像信息原样使用第一次摄像的右区域的图像信息(30张的图像)。由此,能够在使摄像机构120往复运动的状态下连续且顺畅地对空调室内进行摄像。因此,能够缩短摄像时间,反映到适当的空调控制。
即,在本实施例的空调机中,具备在左右方向上往复且对设有室内机的室内进行摄像的摄像机构、根据从摄像机构在每个规定时间输入的图像信息检测人体的位置的人体检测机构、根据由人体检测机构检测的人体的位置推定房间里的人的位置的房间里的人位置推定机构、根据由房间里的人位置推定机构推定的房间里的人的位置改变空调控制的空调控制改变机构,房间里的人位置推定机构使摄像位置在左右方向上转动,根据按照右区域、中央区域、左区域的顺序对各个区域计算的房间里的人的位置信息,推定第一次室内的房间里的人的位置,之后,使摄像机构在左右方向上转动,根据对左区域、中央区域、右区域的各个计算的房间里的人的位置信息,推定第二次室内的房间里的人的位置,作为用于第二次室内的房间里的人的位置推定的左区域的图像信息,使用用于第一次室内的房间里的人的位置推定的摄像机构所摄的左区域的图像信息。作为用于第二次室内的房间里的人的位置推定的左区域的图像信息,通过使用用于第一次室内的房间里的人的位置推定的摄像机构所摄的左区域的图像信息,能够缩短摄像时间,因此能够适当地检测房间里的人的位置并反映到空调控制。
使用第二次以后的摄像(右、中央、左区域)的结果的空调控制与进行上述第一次摄像的场合相同。这样,控制机构130依次获得右、中央、左区域的图像信息并执行人体检测处理,并将其检测结果反映到空调控制。
图6是表示控制机构进行的处理的流程的流程图。另外,图6的处理例如由用户选择进行人体检测的运转模式,通过从遥控Re向室内机100的遥控接收部Q(参照图1)输入规定的指令信号而开始。
另外,图6所示的“开始”时与上述图5所示的时刻t0对应,摄像机构120是对空调室内的左区域进行摄像的方向。
在步骤S101中,控制机构130将n的值设定为1(n=1),并存储在存储机构140中。并且,n的值每当从摄像机构120输入图像信息时都依次增值(S111)。
在步骤S102中,控制机构130从摄像机构120接收图像信息的输入。从摄像机构120输入的图像信息例如是被A/D转换的数字信号。该图像信息包括特定像素的像素数(纵向、横向)与像素值。
在步骤S103中,控制机构130根据从摄像机构120输入的图像信息检测位于空调室内的房间里的人的人数及位置。
控制机构130首先使用从摄像机构120输入的图像信息检测人体的头部及肩部。该检测处理能够通过例如边缘抽出处理及图形匹配执行。
接着,控制机构130对所检测的每个人体计算脸中心的位置,并且计算头部的大小(纵向的长度)D0。并且,控制机构130使上述计算结果与检测时的时刻信息及规定的识别信息对应,并存储在存储机构140中。
另外,控制机构130使检测出的人体的数量(即人数)与检测时的时刻信息对应并存储在存储机构140中。
接着,在图6的步骤S104中,控制机构130执行坐标转换处理。
图7(a)是表示光轴P与垂直面S的关系的说明图。如图7(a)所示,摄像机构120的光轴P相对于水平面具有俯角ε。垂直面S是与光轴P垂直,并且通过房间里的人的脸中心的假想平面。距离L是摄像机构120具有的透镜(未图示)的焦点120a与房间里的人的脸中心的距离。
另外,如上所述,设有室内机100的壁面W与透镜的焦点120a的距离是Δd。
图7(b)是说明图像面所摄的图像与处于实际空间的房间里的人的关系的说明图。图7(b)所示的图像面R是通过摄像机构120具有的多个受光元件(未图示)的平面。与计算的头部的大小D0对应的纵向的视场角γy用以下所示的式子1表示。并且,角度βy[deg/pixel]是每一个像素的视场角(y方向)的平均值,是已知的值。
[数1]
γy=D0·βy …(式子1)
这样,从透镜(未图示)的焦点120a到脸中心的距离L[m]当使脸的纵向的长度的平均值为D1[m](已知的值)时,用以下表示的式子2表示。如上所述,俯角ε是透镜的光轴与水平面所成的角度。
[数2]
图7(c)是表示从透镜的焦点到脸中心的距离L与视场角δx、δy的关系的说明图。
当使从图像面R的中心到图像上的脸中心的X方向、Y方向的视场角分别为δx、δy时,这些用以下所述的式子3、式子4表示。在此,xc,yc是图像内的人体中心的位置(在图像内的X坐标、Y坐标)。另外,Tx[pixel]是摄像画面的横尺寸,Ty[pixel]是摄像画面的纵尺寸,分别是已知的值。
[数3]
因此,实际空间的人体中心的位置由以下所示的式子5~式子7表示。
[数4]
X=L·cosδy×sinδx …(式子5)
Y=L·cosδx×sin(ε-δy) …(式子6)
Z=Δd+L·cosδx×cos(ε-δy) …(式子7)
接着,返回图6继续说明。在步骤S105中,控制机构130执行干扰除去处理1。即,控制机构130在上述人体中心的位置(X,Y,Z)是在适当地检测房间里的人的场合未假想的值时,判断为错误检测(即干扰),删除与之对应的图像信息。
例如,删除Y≤0的场合(通常,人体中心未位于比水平面靠上方)、Y≥2的场合(通常,人体中心未位于比地面靠下方)的图像信息。作为上述干扰的例子,列举反映到电视画面或广告画的人物。
这样,通过提前删除错误检测的场合的图像信息,能够减少进行移动轨迹推定处理(S109)等时的运算量。
接着,在步骤S106中,控制机构130对根据利用步骤S105的处理后剩下的人体的位置坐标、过去所摄的人体的位置信息假定的全部组合计算移动距离。例如,作为图9(a)所示的检测结果,在规定时刻,人体位于位置A及B,在下一个摄像中人体位于位置C,并在下一个摄像中人体位于位置D及E。
在利用本次摄像检测位置C的场合,控制机构130对在过去检测的位置A、B、本次检测的位置C之间假定的全部的组合计算移动距离。即,控制机构130计算房间里的人从位置A移动到位置C的场合的距离LAC与从位置B移动到位置C的场合的距离LBC。另外,在本实施方式中,由于对每个1sec进行摄像,因此能将距离LAC、LBC视为移动速度(其他移动距离也相同)。
这样,控制机构130对根据本次检测的一个或多个人体、过去检测的一个或多个人体所假想的组合计算移动速度。另外,在该时点,本次检测的人体与过去检测的人体的对应关系无法判断。
接着,在步骤S107中,控制机构130执行干扰除去处理2。即,控制机构130将移动距离为规定值以上的组合从移动轨迹的推定对象除去。
图8是表示房间里的人的移动速度与活动量的关系的图表。图8所示的图表的横轴是房间里的人的移动速度[m/s],纵轴是房间里的人的活动量[W/m2]。如图8所示,即,在移动速度小于0.5m/s的区域,活动量是1(房间里的人大致静止)。另外,在移动速度为0.5m/s以上的区域,活动量与移动速度大致成比例地增加。
并且,图8所示的信息(移动速度与活动量的对应关系)预先存储在存储机构140(参照图3)中。
另外,房间里的人以1.5[m/s]以上的速度移动是极少的,因此将该区域作为无效区域(图8的斜线部分)。因此,在步骤S107中,控制机构130将移动距离为1.5[m/s]以上的组合(本次的检测结果与过去的检测结果的组合)从处理对象去除。
这样,通过预先除去满足规定条件的组合,能够防止与过去无法检测的其他人体弄混。另外,能够减少进行后述的移动轨迹推定处理时的运算压力。
接着,在步骤S108中,控制机构130计算活动量。即,控制机构130参照表示移动速度与活动量的对应关系的信息(参照图8),与在步骤S106中计算出的各移动距离(但是,在S107的处理中剩下的)对应地计算活动量。
另外,即使在该时点,也无法判断本次检测的人体与过去检测的人体的对应关系。
接着,在步骤S109中,控制机构130执行移动轨迹推定处理(跟踪摄影)。即,控制机构130从成为候补的多个移动轨迹中推定房间里的人实际的移动轨迹。另外,在图9(a)所示的例子中,作为检测出的人体的移动轨迹,考虑以下两个方面。
1.房间里的人(第一人)从位置A移动到位置C。
2.房间里的人(第二人)从位置B移动到位置C。
控制机构130特定根据本次检测的人体位置与过去检测的一个或多个人体位置假想的组合中对应的活动量为最小的组合。
即,控制机构130通过比较与距离LAC对应的活动量MAC和与距离LBC对应的活动量MBC的大小来判断上述1、2的任一个是否正确。如上所述,在本实施方式中,由于对每一个1sec进行摄像,因此能够将距离LAC、LBC视为移动速度。另外,根据图8,移动速度与活动量为正相关。因此,活动量的大小原样与移动距离的长短对应。
例如,当比较图9(a)所示的距离LAC与距离LBC时,距离LAC短(LAC<LBC)。因此,当比较活动量MAC与活动量MBC时,活动量MAC小(MAC<MBC)。
控制机构130将给予相对小的活动量的移动轨迹推定为房间里的人实际的移动轨迹。即,控制机构130推定为第一人的人体从位置A移动到位置C(参照图9(b)),使该位置(A→C)与活动量MAC对应并存储在存储机构140中。
这样,通过将距离最短的移动轨迹推定为实际的移动轨迹,能够适当且容易地特定移动轨迹。
并且,与在前一次的摄像中位于位置B的第二人的人体对应的人体在本次摄像中无法检测(参照图9(b))。在该场合,控制机构130使位置B与摄像时刻对应,作为之后的移动轨迹推定处理的候补存储在存储机构140中。这样,本次具有检测遗漏的可能性的后部从下一次到规定次数(例如5次)的摄像结束一直残留。
在接下来的摄像中,当在图9(a)所示的位置D、E检测人体时,控制机构130比较与距离LCD、距离LCE、距离LBD、距离LBE分别对应的活动量的大小。在此,作为移动轨迹推定处理的候补,从存储机构140读取上述位置B。
如图9(a)所示,移动距离的长短为LCD<LCE<LBE<LBD。因此,对应的活动量的大小为MCD<MCE<MBE<MBD。并且,控制机构130使给予相对小的活动量的移动轨迹、即C→D与活动量MCD对应并存储在存储机构140中。
这样,判断为第一人的人体以A→C→D的方式移动(参照图9(b))。因此,控制机构130从移动轨迹的推定对象去除B→D的移动、及C→E的移动。其结果,控制机构130判断为第二人的人体以位置B→□→E的方式移动(参照图9(b))。
这样,控制机构130每当在从摄像机构120输入图像信息时都检测房间里的人,推定其移动轨迹。
另外,在推定移动轨迹时,就过去检测的一个或多个人体而言,优选从直到上述过去的检测时的活动量小的人体依次推定移动轨迹。在此,“到上述的过去的检测时的活动量”可以是伴随从大前次到前一次的移动的活动量,也可以是考虑比之靠前的移动且越接近现在越加权的活动量的和。
一般地,人类无法快速地改变动作。例如,过去未进行动作的人体现在也未进行动作、或即使进行动作移动距离也比较短的可能性高。另外,过去进行动作的人体现在还继续进行动作的可能性高。
通过从活动量小的人体依次推定移动轨迹,能够将过去的动作过程反映为活动量,从而更有效且适当地推定移动轨迹。
作为其他例子,如图10(a)所示,在规定时刻在位置A及B检测人体,在下一个摄像中,在位置C、D检测人体,在接下来的摄像中,在位置E及F检测人体。
另外,图10所示的距离LAD、LBD、LDE、LDF分别是1.5m以上(即移动速度为1.5m/s以上)。
在该场合,在上述步骤S107的干扰除去处理2(参照图6)中,移动速度为1.5m/s以上的A→D、B→D、D→E及D→F的组合从移动轨迹的候补中被除去。
因此,控制机构130使用与图9(a)的场合相同的方法推定为第一人以A→C→E的方式移动,第二人以B→□→E的方式移动(参照图10(b))。另外,就在位置D检测的人体而言,推定为与上述两者不同的人体(第三人)(参照图10(b)),并存储在存储机构140中。
另外,图6所示的步骤S102~S110相当于使用在图5所示的时刻t0~t1(左区域的摄像:参照符号G3)执行的N次摄像中、一次左右的图像信息的处理。
接着,在图6的步骤S110中,控制机构130判断是否是n=N。另外,N是预定的值(例如,N=30),是在左、中央、右区域的各个中对室内进行摄像的次数。
在n=N的场合(S110→Yes),控制机构130的处理转移到步骤S112。另一方面,在不是n=N、即n<N的场合(S110→No),控制机构130的处理转移到步骤S111。在步骤S111中,控制机构130使n的值增值,并返回步骤S102的处理。
接着,在步骤S112中,控制机构130如下执行区域判断处理α(与图5所示的区域判断α1L对应)。
即,控制机构130使房间里的人的人数为在中途看不见的人体及能够追踪到最后的人体中、其检测率为20%以上的人体数。在图10(b)所示的例子中,第一人的检测次数在30次的摄像中是27次,检测率是90%。同样地,第二人的检测率是50%,第三人的检测率是10%(<20%)。
因此,控制机构130视为错误检测第三人(或在中途从空调室内退出),成为处理对象之外的对象。
另外,即使对30次摄像中无法连续地检测5次的人体,控制机构130也视为是错误检测(或在中途从空调室退出),成为处理对象之外的对象。
另外,控制机构130使各个房间里的人的位置为其区域(本次为主区域)中能够最后检测的位置。
另外,就与在步骤S109中推定的移动轨迹对应的活动量而言,控制机构130越接近现在时刻越加权地计算和,并与房间里的人的位置对应地存储在存储机构140中。
接着,在步骤S113中,控制机构130判断是否以规定次数N次依次对左、中央、右区域的全部进行摄像。在以规定次数N次依次对左、中央、右区域的全部进行摄像的场合(S113→Yes),控制机构130的处理转移到步骤S115。另一方面,在未对左、中央、右区域中至少一个进行摄像的场合,控制机构130的处理转移到步骤S114。
在步骤S114中,控制机构130以规定角度使摄像机构120转动,开始下一区域的摄像,并返回步骤S101的处理。例如,在左区域的摄像结束的场合,控制机构130使摄像机构120向右转动,开始中央区域的摄像。
在步骤S115中,控制机构130如下那样执行最终判断β(与图5所示的第一次最终判断β1对应)。
即,使在左、中央、右区域获得的活动量与各个位置对应地重合。另外,利用检测区域重合的区域B4、B7(参照图4(b))双方检测人体,并且,在人体的间隔为规定距离(例如2m)以内的场合,控制机构130判断为是相同人物。
在该场合,采用距检测时的经过时间短的一方,减少重复的人数。
这样,控制机构130通过使空调室内的活动量(对从过去到现在的活动量加权后的活动量)与步骤S115的位置信息对应,能够正确地把握活动量的分布。
另外,控制机构130使由上述上下方向的五个区域(参照图4(a))与左右方向的10个区域(参照图4(b))划分的50(=5×10)的各区域与上述活动量的分布对应地存储在存储机构140中。
接着,在图6的步骤S116中,控制机构130执行风向、风量的控制处理。即,控制机构130参照上述50个区域的活动量的分布,与该分布对应地控制左右风向板104及上下风向板105的角度。另外,根据空调室内的活动量的分布、体感温度的平均值以及从各种传感器输入的信号调整送风风扇103的旋转速度。
并且,在执行冷房运转的场合,控制机构130重点地朝向活动量大的区域输送冷风。另一方面,在执行暖房运转的场合,控制机构130重点向活动量小的区域输送暖风。
图11(a)是根据活动量的分布的上下方向的风向控制的说明图(侧视图)。在执行冷房运转时,在上下方向,当在图4(a)的区域A1的活动量相对大时,控制机构130如下那样控制风向。即,控制机构130以沿图11(a)的符号c1表示的方向输送冷风的方式使上下方向板105转动。
同样地,在上下方向,当在图4(a)的区域An(n=2,···,5)的活动量大时,控制机构130以沿符号cn所示的方向输送冷风的方式使上下风向板105转动。
另一方面,在执行暖房运转时,当在上下方向,在图4(a)的区域An(n=1,···,5)的活动量相对小时,控制机构130以沿图11(a)的符号hn所示的方向输送冷风的方式使上下风向板105转动。
图11(b)是与活动量的分布对应的左右方向的风向控制的说明图(俯视图)。在执行冷房运转时,在左右方向,当在图4(a)的区域B1的活动量相对大时,控制机构130执行以下的控制。即,控制机构130以重点向以图11(a)的符号f1表示的方向输送冷风的方式使上下风向板105转动。
同样地,在左右方向中,当在图4(a)的区域An(n=2,···,10)的活动量大时,控制机构130以重点向以符号fn所示的方向输送冷风的方式使左右方向板104转动。
另一方面,在执行暖房运转时,在左右方向中,当在图4(a)的区域An(n=1,···,10)的活动量相对小时,控制机构130以重点向以图12(a)的符号fn表示的方向输送暖风的方式使左右风向板104转动。这样,根据空调室内的活动量的分布以及空调模式控制上下风向板105、左右风向板104的方向。
根据本实施方式的空调机A,通过使用从摄像机构120输入的图像信息进行人体检测,能够提高房间里的人的检测准确率。
例如,如上述专利文献1所记载的技术那样,在通过使用脸检测功能检测房间里的人的场合,即使为了进行脸检测而使用高显像度的摄像机构,房间里的人的检测准确率也低。在该场合,即使使用摄像机构在每个规定时间(例如1sec)对室内进行摄像,也无法适当地推定房间里的人的移动轨迹,脸检测的结果无法有效地反映到空调控制。
相对于此,根据本实施方式的空调机A,不论房间里的人的脸的方向,或是否逆光,都能够以高准确率检测人体(房间里的人的上半身)。这样,通过使用人体检测提高检测准确率,能够不特定个人地适当进行移动轨迹的推定(跟踪摄影)。
另外,在进行人体检测的场合,能够以比进行脸检测的场合低的显像度对应。因此,能够减少用于摄像机构120的成本。
另外,在本实施方式中,控制机构130依次特定根据本次检测的人体位置与过去检测的多个人体位置假想的组合中、对应的活动量为最小的组合并推定移动轨迹。
这样,通过从活动量小的组合(即,每单位时间的移动距离短的组合)依次特定移动轨迹,能够适当且有效地推定移动轨迹。
另外,在本实施方式中,在人体中心(X,Y,Z)位于规定范围的场合、人体的移动速度为1.5m/s以上的场合,控制机构130从处理对象除去这些(S105,S107:参照图6)。
由此,能够防止错误检测,并且减少对之后的移动轨迹推定处理等所需的运算量。
另外,根据本实施方式,将使摄像机构120在左右方向上往复且对房间整体进行摄像,将使摄像机构120向右转动并摄像的右区域的图像信息原样在接下来使摄像机构120向左转动并摄像时(左区域也相同)使用。因此,能够在使摄像机构120往复运动的状态下连续且顺畅地对空调室内进行摄像。
另外,根据本实施方式,通过推定人体的移动轨迹(进行跟踪摄影),能够在时间上连续地检测检测出的人体各个的活动量。因此,能够适当地推定检测出的各个人体的活动量及体感温度,与人体位置对应且适当反映到空调控制。
例如,在暖房运转时,以朝向活动量小(体感温度低)的人体重点地输送暖风的方式控制送风风扇103的旋转速度、左右风向板104的角度以及上下风向板105的角度。由此,通过一边保持体感温度比体感温度的平均值低的房间里的人的舒适性一边根据体感温度的平均值降低设定温度,能够减少消耗电力,从而节电。
以上,根据上述实施方式说明了本发明的空调机A,但本发明的实施方式未局限于此,能进行多种改变。
例如,在上述实施方式中,对根据活动量推定移动轨迹的场合进行说明,但未限定于此。即,可以通过直接使用人体的移动距离,推定移动轨迹。
如上所述,每个规定时间的人体的移动距离(即移动速度越快)与活动量具有正相关关系(参照图8)。因此,通过对本次检测的一个或多个人体依次特定根据本次检测的人体的位置与过去检测的一个或多个人体的位置假想的组合中对应的移动距离为最小的组合,能够推定移动轨迹。
另外,在推定移动轨迹时,就过去检测的一个或多个人体而言,可以从到该过去检测时的移动距离(移动速度)小的人体依次推定移动轨迹。由此,能够反映过去的动作过程,有效且适当推定移动轨迹。
另外,通过使用由人体检测部131得到的检测结果,能够利用房间里的人密度推定机构求出空调室内的房间里的人的密度(每单位体积所存在的人数)。房间里的人的体感温度除了活动量,即使根据上述密度也变动(与密度具有正相关关系)。在该场合,控制机构130在每次对空调室内(左、中央、右区域)进行摄像时,计算位于室内的人体的密度分布,将该密度反应到房间里的人的体感温度上。
例如,在进行暖房运转时,在利用上述密度判断为房间里的人的体感温度比较高的场合,控制机构130以抵消体感温度的上升的方式降低设定温度,从而降低压缩机(未图示)的旋转速度(在冷房运转时,相反地,增加压缩机的转数)。由此,能够确保房间里的人的舒适性,并且降低电力消耗。
另外,控制机构130可以以调整上下风向板105及左右风向板104的转动角度而避开人体的密度高的区域的方式送风(在冷房运转时相反,向人体密度高的区域送风)。
另外,在上述实施方式中,对通过使摄像机构120(视野角为60°)转动,依次对左、中央、右进行摄像,对在俯视中为150°的区域进行摄像的场合进行说明,但并未局限于此。
在摄像机构120具有充分的视野角的场合,能够不使摄像机构120转动地进行人体检测处理。该场合的移动轨迹的推定处理方法能够利用与上述实施方式相同的方法进行。
另外,在上述实施方式中,对将摄像机构120设置在室内机100的固定部111上的场合进行说明,但并未限定于此。即,只要能够对空调室内进行摄像,也能够将摄像机构120设置在室内机100的其他部位。
另外,在上述各实施方式中,对根据移动轨迹推定处理的结果,改变送风风扇103的旋转速度、左右风向板104的角度及上下风向板105的角度的场合进行说明,但并未限定于此。即,可以改变送风风扇103的旋转速度、左右风向板104的角度以及上下风向板105的角度中至少一个。
另外,可以根据移动轨迹推定处理的结果适当改变空调机A的设定温度,随此,改变设置在压缩机(未图示)上的马达(未图示)的旋转速度。
Claims (2)
1.一种空调机,其特征在于,
具备:
在左右方向上往复且对设有室内机的室内进行摄像的摄像机构;
根据从上述摄像机构在每个规定时间输入的图像信息检测人体的位置的人体检测机构;
根据由上述人体检测机构检测的人体位置推定房间里的人的位置的房间里的人位置推定机构;以及
根据由上述房间里的人位置推定机构推定的房间里的人的位置改变空调控制的空调控制改变机构,
上述房间里的人位置推定机构使上述摄像机构在左右方向上转动,根据按照右区域、中央区域、左区域的顺序对各个区域计算的房间里的人的位置信息,推定第一次室内的房间里的人的位置,
之后,使上述摄像机构在左右方向上转动,根据按照上述左区域、上述中央区域、上述右区域的顺序对各个区域计算的房间里的人的位置信息,推定第二次室内的房间里的人的位置,
作为用于上述第二次室内的房间里的人的位置推定的上述左区域的上述图像信息,使用用于上述第一次室内的房间里的人的位置推定的上述左区域的上述图像信息。
2.根据权利要求1所述的空调机,其特征在于,
根据由上述房间里的人位置推定机构推定的房间里的人的位置,改变压缩机、上下风向板、以及左右风向板的至少任一个。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012-229401 | 2012-10-17 | ||
| JP2012229401A JP6335425B2 (ja) | 2012-10-17 | 2012-10-17 | 空気調和機 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN103776099A true CN103776099A (zh) | 2014-05-07 |
Family
ID=50568645
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201310369724.9A Pending CN103776099A (zh) | 2012-10-17 | 2013-08-22 | 空调机 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6335425B2 (zh) |
| CN (1) | CN103776099A (zh) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104061662A (zh) * | 2014-07-17 | 2014-09-24 | 珠海格力电器股份有限公司 | 一种人体检测方法、装置和空调 |
| CN105258226A (zh) * | 2015-11-17 | 2016-01-20 | 美的集团武汉制冷设备有限公司 | 空调室内机 |
| WO2019061911A1 (zh) * | 2017-09-27 | 2019-04-04 | 格力电器(武汉)有限公司 | 出风口结构、空调及出风口姿态调整方法 |
| CN110173867A (zh) * | 2019-05-29 | 2019-08-27 | 广东美的制冷设备有限公司 | 空调器的控制方法、空调器及计算机可读存储介质 |
| CN110244668A (zh) * | 2019-05-09 | 2019-09-17 | 特斯联(北京)科技有限公司 | 一种基于空间状态分析的智能建筑控制方法与系统 |
| CN110779151A (zh) * | 2019-11-14 | 2020-02-11 | 宁波奥克斯电气股份有限公司 | 空调器控制方法、装置、空调器及存储介质 |
| CN112880188A (zh) * | 2021-03-05 | 2021-06-01 | 青岛海尔空调器有限总公司 | 暖风机控制方法、装置、电子设备和存储介质 |
| CN113668201A (zh) * | 2020-04-30 | 2021-11-19 | 云米互联科技(广东)有限公司 | 循环扇控制方法、循环扇、循环扇控制系统及存储介质 |
| CN114046560A (zh) * | 2021-11-15 | 2022-02-15 | 珠海格力电器股份有限公司 | 一种温度调节方法、装置、供暖设备及供暖系统 |
| CN114909763A (zh) * | 2022-05-23 | 2022-08-16 | 中国建筑科学研究院有限公司 | 一种生物技术用的智能空气洁净装置 |
| WO2023168831A1 (zh) * | 2022-03-10 | 2023-09-14 | 广东美的制冷设备有限公司 | 空调室内机及其控制方法、计算机可读存储介质 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6428144B2 (ja) * | 2014-10-17 | 2018-11-28 | オムロン株式会社 | エリア情報推定装置、エリア情報推定方法、および空気調和装置 |
| JP7315216B2 (ja) | 2019-11-29 | 2023-07-26 | 公立大学法人会津大学 | 補正距離算出装置、補正距離算出用プログラムおよび補正距離算出方法 |
| CN113310200A (zh) * | 2020-02-26 | 2021-08-27 | 广东美的制冷设备有限公司 | 空调器、空调器的控制方法和计算机可读存储介质 |
| CN113310201A (zh) * | 2020-02-26 | 2021-08-27 | 广东美的制冷设备有限公司 | 空调器、空调器的控制方法和计算机可读存储介质 |
| CN114110963B (zh) * | 2021-11-11 | 2022-11-18 | 珠海格力电器股份有限公司 | 一种具有智能调节功能的空调器及控制方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101493246A (zh) * | 2008-01-25 | 2009-07-29 | Lg电子株式会社 | 空调机及其动作方法 |
| CN103673090A (zh) * | 2012-09-03 | 2014-03-26 | 日立空调·家用电器株式会社 | 空气调节器 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3510217B2 (ja) * | 1991-10-18 | 2004-03-22 | コニカミノルタホールディングス株式会社 | 画像撮影装置、画像ファイル装置及び画像処理システム |
| CN1056225C (zh) * | 1992-03-07 | 2000-09-06 | 三星电子株式会社 | 空调系统 |
| JP3828010B2 (ja) * | 2001-12-21 | 2006-09-27 | 株式会社日立国際電気 | 画像受信システム |
| JP4885017B2 (ja) * | 2007-03-12 | 2012-02-29 | 三菱電機株式会社 | 空気調和装置 |
| JP2009030837A (ja) * | 2007-07-25 | 2009-02-12 | Toppan Printing Co Ltd | 画像処理を用いたクリーンルーム送風量制御システム |
| KR101558504B1 (ko) * | 2008-12-26 | 2015-10-07 | 엘지전자 주식회사 | 공기조화기 및 그 동작방법 |
-
2012
- 2012-10-17 JP JP2012229401A patent/JP6335425B2/ja not_active Expired - Fee Related
-
2013
- 2013-08-22 CN CN201310369724.9A patent/CN103776099A/zh active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101493246A (zh) * | 2008-01-25 | 2009-07-29 | Lg电子株式会社 | 空调机及其动作方法 |
| CN103673090A (zh) * | 2012-09-03 | 2014-03-26 | 日立空调·家用电器株式会社 | 空气调节器 |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104061662A (zh) * | 2014-07-17 | 2014-09-24 | 珠海格力电器股份有限公司 | 一种人体检测方法、装置和空调 |
| CN104061662B (zh) * | 2014-07-17 | 2017-02-15 | 珠海格力电器股份有限公司 | 一种人体检测方法、装置和空调 |
| CN105258226A (zh) * | 2015-11-17 | 2016-01-20 | 美的集团武汉制冷设备有限公司 | 空调室内机 |
| CN105258226B (zh) * | 2015-11-17 | 2019-03-12 | 美的集团武汉制冷设备有限公司 | 空调室内机 |
| WO2019061911A1 (zh) * | 2017-09-27 | 2019-04-04 | 格力电器(武汉)有限公司 | 出风口结构、空调及出风口姿态调整方法 |
| CN110244668A (zh) * | 2019-05-09 | 2019-09-17 | 特斯联(北京)科技有限公司 | 一种基于空间状态分析的智能建筑控制方法与系统 |
| CN110173867A (zh) * | 2019-05-29 | 2019-08-27 | 广东美的制冷设备有限公司 | 空调器的控制方法、空调器及计算机可读存储介质 |
| CN110779151A (zh) * | 2019-11-14 | 2020-02-11 | 宁波奥克斯电气股份有限公司 | 空调器控制方法、装置、空调器及存储介质 |
| CN113668201A (zh) * | 2020-04-30 | 2021-11-19 | 云米互联科技(广东)有限公司 | 循环扇控制方法、循环扇、循环扇控制系统及存储介质 |
| CN113668201B (zh) * | 2020-04-30 | 2023-10-03 | 云米互联科技(广东)有限公司 | 循环扇控制方法、循环扇、循环扇控制系统及存储介质 |
| CN112880188A (zh) * | 2021-03-05 | 2021-06-01 | 青岛海尔空调器有限总公司 | 暖风机控制方法、装置、电子设备和存储介质 |
| CN114046560A (zh) * | 2021-11-15 | 2022-02-15 | 珠海格力电器股份有限公司 | 一种温度调节方法、装置、供暖设备及供暖系统 |
| CN114046560B (zh) * | 2021-11-15 | 2022-12-27 | 珠海格力电器股份有限公司 | 一种温度调节方法、装置、供暖设备及供暖系统 |
| WO2023168831A1 (zh) * | 2022-03-10 | 2023-09-14 | 广东美的制冷设备有限公司 | 空调室内机及其控制方法、计算机可读存储介质 |
| CN114909763A (zh) * | 2022-05-23 | 2022-08-16 | 中国建筑科学研究院有限公司 | 一种生物技术用的智能空气洁净装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014081145A (ja) | 2014-05-08 |
| JP6335425B2 (ja) | 2018-05-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103776099A (zh) | 空调机 | |
| CN103673090B (zh) | 空气调节器 | |
| CN103673089B (zh) | 空气调节机 | |
| CN107305035B (zh) | 空调机 | |
| CN102519088B (zh) | 空调机 | |
| CN104949281B (zh) | 空调器及其控制方法、控制装置 | |
| CN104422085B (zh) | 空气调节机 | |
| US9657743B2 (en) | Air conditioner and control method thereof | |
| JP5879221B2 (ja) | 空気調和機 | |
| JP6238197B2 (ja) | 空気調和機 | |
| JP6596269B2 (ja) | 空気調和機 | |
| CN105276681A (zh) | 空调机 | |
| CN103851745A (zh) | 空气调节机 | |
| CN103471213A (zh) | 空调机和空调机的控制方法 | |
| KR20090085368A (ko) | 공기조화기 및 그 제어방법 | |
| CN105135590B (zh) | 空气调节机 | |
| CN106403072A (zh) | 室外机及其积灰检测方法 | |
| CN103673210A (zh) | 空调机及空调机的控制方法 | |
| CN105518396B (zh) | 空调系统 | |
| CN102575865B (zh) | 空气调节机 | |
| CN104422074A (zh) | 空气调节器 | |
| CN105020866A (zh) | 空气调节机 | |
| JP2015190666A (ja) | 空気調和機の室内機及びこれを用いた空気調和機 | |
| JP2015001313A (ja) | 空気調和機 | |
| CN103528162B (zh) | 空调机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C41 | Transfer of patent application or patent right or utility model | ||
| TA01 | Transfer of patent application right |
Effective date of registration: 20160812 Address after: Hongkong, China Applicant after: Johnson Controls Hitachi air conditioning technology (Hongkong) Co., Ltd. Address before: Tokyo, Japan, Japan Applicant before: Hitachi Appliances Inc. |
|
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20140507 |
|
| WD01 | Invention patent application deemed withdrawn after publication |