CN101155672B - 平行运动的机器 - Google Patents
平行运动的机器 Download PDFInfo
- Publication number
- CN101155672B CN101155672B CN2005800395787A CN200580039578A CN101155672B CN 101155672 B CN101155672 B CN 101155672B CN 2005800395787 A CN2005800395787 A CN 2005800395787A CN 200580039578 A CN200580039578 A CN 200580039578A CN 101155672 B CN101155672 B CN 101155672B
- Authority
- CN
- China
- Prior art keywords
- machine
- reinforcement
- adjusting device
- parallel motion
- motion according
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000002787 reinforcement Effects 0.000 claims description 100
- 230000007704 transition Effects 0.000 claims 1
- 230000003014 reinforcing effect Effects 0.000 abstract description 5
- 238000005452 bending Methods 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 229920000049 Carbon (fiber) Polymers 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000004917 carbon fiber Substances 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical compound C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 description 1
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
- B25J17/02—Wrist joints
- B25J17/0258—Two-dimensional joints
- B25J17/0266—Two-dimensional joints comprising more than two actuating or connecting rods
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q1/00—Members which are comprised in the general build-up of a form of machine, particularly relatively large fixed members
- B23Q1/25—Movable or adjustable work or tool supports
- B23Q1/26—Movable or adjustable work or tool supports characterised by constructional features relating to the co-operation of relatively movable members; Means for preventing relative movement of such members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q1/00—Members which are comprised in the general build-up of a form of machine, particularly relatively large fixed members
- B23Q1/25—Movable or adjustable work or tool supports
- B23Q1/44—Movable or adjustable work or tool supports using particular mechanisms
- B23Q1/50—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism
- B23Q1/54—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q1/00—Members which are comprised in the general build-up of a form of machine, particularly relatively large fixed members
- B23Q1/25—Movable or adjustable work or tool supports
- B23Q1/44—Movable or adjustable work or tool supports using particular mechanisms
- B23Q1/50—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism
- B23Q1/54—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only
- B23Q1/545—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only comprising spherical surfaces
- B23Q1/5462—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only comprising spherical surfaces with one supplementary sliding pair
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T409/00—Gear cutting, milling, or planing
- Y10T409/30—Milling
- Y10T409/306664—Milling including means to infeed rotary cutter toward work
- Y10T409/307672—Angularly adjustable cutter head
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T409/00—Gear cutting, milling, or planing
- Y10T409/30—Milling
- Y10T409/309576—Machine frame
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20207—Multiple controlling elements for single controlled element
- Y10T74/20305—Robotic arm
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20207—Multiple controlling elements for single controlled element
- Y10T74/20305—Robotic arm
- Y10T74/20317—Robotic arm including electric motor
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Machine Tool Units (AREA)
- Manipulator (AREA)
- Lenses (AREA)
- Sorption Type Refrigeration Machines (AREA)
- Compression-Type Refrigeration Machines With Reversible Cycles (AREA)
- Transmission Devices (AREA)
- Pivots And Pivotal Connections (AREA)
- Transplanting Machines (AREA)
- Laser Beam Processing (AREA)
- Soil Working Implements (AREA)
- Lifting Devices For Agricultural Implements (AREA)
- Working Measures On Existing Buildindgs (AREA)
- Extrusion Moulding Of Plastics Or The Like (AREA)
- Machines For Laying And Maintaining Railways (AREA)
Abstract
一种平行运动的机器(1),其包括至少三个可被单独伸长和缩短的调整装置(4.1,4.2,4.3),其中各调整装置(4.1,4.2,4.3)通过第一接头(8,9,10)与定位头(11)连接,各调整装置(4.1,4.2,4.3)通过万向节(3.1,3.2,3.3)与底座(2)连接,并且所述定位头(11)可根据调整装置(4.1,4.2,4.3)的操纵在工作范围内移动,其中至少两个加固梁(5.1,5.2,5.2.1,5.2.2)通过各自的梁旋转轴承(100.1,100.2)与定位头(11)连接,各梁旋转轴承仅具有一个自由度,其中各加固梁(5.1,5.2,5.2.1,5.2.2)适于当一个或更多的所述调整装置(4.1,4.2,4.3)被伸长或缩短时在底座(2)的梁轴承(17.1,17.2,17.2.1,17.2.2)中横向滑动,各梁轴承(17.1,17.2,17.2.1,17.2.2)通过梁万向节(BU1,BU2)与底座(2)连接,并且至少一个加固梁(5.2,5.2.1,5.2.2)的梁轴承(17.2,17.2.1,17.2.2)可围绕与所述加固梁(5.2,5.2.1,5.2.2)的纵向轴线平行延伸的轴线旋转。
Description
技术领域
本发明涉及机床领域,特别是涉及用于工业中的机器人。
背景技术
美国专利说明书U.S.4,732,525(对应SE 452279)讲授了一种常规设计的机器人形式的平行运动的机器。这种机器人包括三个能够伸长和缩短的调整装置,以及一个在其一端带有定位头的中心管。该中心管也被安装成通过万向节形式的中心轴承沿其轴向运动,该万向节可提供相对于机器底座的三个自由度。每个调整装置通过一个可提供三个自由度的接头与所述定位头相连接,并且还通过一个具有两个自由度的接头与机器底座相连接,以便使所述定位头能够在有限的工作范围内移动。所述调整装置仅调整拉力和压力,而中心管调整所有的旋转力和由于载荷施加在定位头上而产生的弯曲应力。
这种机器移动的精确性主要取决于其刚度,而刚度又取决于可用的轴承/自由度的数量,也取决于部件材料最小化关键方向上扭转应力和弯曲应力的能力。例如,可以提及的是,定位头的大的侧向力导致中心管出现弯曲和/或在机器底座中其回转方位和其与所述调整装置的连接件之间旋转的倾向。
因此,所描述的常规机器的刚度尤其取决于调整装置与定位头的连接的设计,也取决于中心管自身的固有刚度。为了增强这种常规机器的刚度,有必要首先在每个接头中应用更严格的公差,其次是使用更坚固的中心管,随之带来重量增加。
该中心管可通过使用更硬的材料和/或通过增加中心管的厚度和/或增加其直径来制造得更加坚固。
然而,所有这些机器刚度的改进都导致更高的成本,更重的机器以及可操纵该定位头的工作区域的减少。
已知的类似的平行运动的机器还来源于,例如英国专利申请8319708(2,143,498)、US 4,569,627和NO 148216。
然而,这些已知的机器中没有一种具有允许现代机器期望达到的刚度水平和随之而来的精度水平的基本结构。
发明内容
本发明的一个目的在于提供一种平行运动的机器,其刚度和其随之而来的所期望的精度大于先前已知的平行运动的机器的刚度和精度,并且具有可实现相对较低制造成本的简单结构。
进一步的目的在于提供这样一种机器,该机器不具有中心管,以改善定位头在其工作范围内的灵活性,并且随之也帮助实现简单的结构以及相对较低的制造成本。
还有,另一目的在于减少这种机器的运动质量。
本发明涉及一种平行运动的机器,其包括至少三个调整装置,所述调整装置在其纵向方向上可以单独地伸长和缩短。每个调整装置通过第一接头与定位头连接,还通过适当的万向节与机器底座连接,该万向节的形式可以是回转装置或者是球头螺钉。因此,该定位头可通过操纵该调整装置,在工作范围内被移动。至少两个加固梁通过各自的梁旋转轴承与所述定位头连接,每个梁旋转轴承仅具有一个自由度。每个加固梁被布置成,当一个或更多的所述调整装置被伸长或缩短时在底座支撑的梁轴承中横向滑动。另外,每个梁轴承通过梁万向节与机器底座连接,并且至少一个加固梁的梁轴承可围绕与该加固梁的纵向轴线平行延伸的轴线旋转。
这个概念产生数个关于机器底座、调整装置、加固梁和定位头之间关系的可行的基本实施例,这些基本实施例一方面是关于这些部件的相互关系,另一方面是关于机器底座中和定位头中部件轴承的相互关系,这将根据下面参照图6进行描述的部分而变得明显。
下面所述的详细实施例包括三个调整装置,每个调整装置与其各自的加固梁连接,其中第二个调整装置还具有附加的加固梁。
万向节包括外回转元件,该外回转元件被安装在前述底座中以便围绕外回转轴线旋转,并且进一步包括内回转元件,该内回转元件被安装在所述外回转元件中以便围绕与所述外回转轴线成直角的内回转轴线旋转。在这种情况下,梁轴承优选与万向节的内回转元件连接。在其他实施例的情况下,梁轴承可以与所述调整装置的万向节分开,但与自身的万向节相连,该自身的万向节与该调整装置的万向节成间隔关系,然而,所述自身的万向节需要自身的梁旋转轴承来将该加固梁与定位头连接。
将根据所图示的实施例而变得明显的是,第一接头仅具有一个自由度,由此在消除需要使用中心管的同时赋予该机器刚度。
每个加固梁适于在一第一方向上呈现抗弯强度,该抗弯强度远远超过加固梁在与该第一方向成直角的方向上的抗弯强度。这使所述加固梁能够具有大致矩形的横截面形状或者椭圆的横截面形状。然而,应该理解,可以想到其他横截面形状也落入本发明的范围内,例如工字梁(I-beam)。所述加固梁优选由用碳纤维加固的复合材料制成。
根据详细显示的实施例,该机器包括三个调整装置,每个调整装置在所述第一接头处与加固梁永久连接。其中一个调整装置还具有附加的加固梁,以便在所有方向上均获得大致相同的刚度。如上面所指出的,可以想到该机器仅具有两个彼此成直角设置的加固梁。至少一个加固梁的梁轴承可围绕自身的纵向轴线旋转,或者围绕在其底座轴承中的与所述自身纵向轴线平行的轴线旋转。在这个图示的实施例中,这对加固梁可在内回转元件中围绕所述调整装置旋转。
图示实施例的每个调整装置由螺钉-螺母机构构成,其中螺母与内回转元件永久连接。然而,应该理解,完全可以想象其他具有其他类型调整装置的机器设计也落入本发明范围内。例如,可以使用线性马达作为调整装置来替代图示的螺钉-螺母机构。这种线性马达甚至可以由加固梁构成,或者包括加固梁的一部分。
每个加固梁包括至少一个纵向延伸的第一滑动元件,例如是可以被粘结或坚固地拧到梁上的钢制滑杆,所述第一滑动元件以形状锁定方式与第二滑动元件(例如导轨)连接,但可相对第二滑动元件滑动,其中第二滑动元件直接或间接地通过中间轴承与所述螺母连接。在第二滑动元件间接地通过中间轴承与螺母连接的情况下,所述第二滑动元件由于能够在调整装置周围倾斜而相对于所述螺母以形状方式进行导向,这可以根据所图示的带有双加固梁的万向节轴承的实施例而变得明显。虽然图示实施例显示了通过允许所述加固梁在内回转元件中旋转,加固梁可以围绕与该加固梁的对称纵向轴线平行延伸的轴线旋转,但可以理解,相应的旋转也可通过安装整个万向节使其在机器底座中也就是所述接头的外回转元件中旋转来实现。
所述螺钉或螺母由调整装置马达可旋转地驱动。当由马达驱动的是螺钉时,马达与该螺钉的一端连接,而所述螺钉的另一端由支撑轴承支撑。在详细显示的实施例中,调整装置马达被安装在马达架中,马达架的一端具有所述第一接头的一部分,并且该马达架还包括连接表面,一个或更多的加固梁要被紧靠在所述连接表面上而固定。或者,容纳调整装置马达的马达架也可以安装在相对于所示部分而言的螺钉的另一端,由此在这种情况下,螺钉的“无马达”端与所述第一接头连接。当由马达驱动的是螺母时,所述驱动可例如通过皮带传动等来实现,以便可以容易地改变调整装置与马达的比率。
在定位头处的第一接头中的两个第一接头包括相互平行的接头轴线,而所述定位头处的第三个所述第一接头包括与其他两个接头轴线成直角延伸的接头轴线。另外,每个调整装置的万向节的内回转轴线与那些不允许倾斜的接头中的该调整装置的第一接头的接头轴线平行,其中不允许倾斜也就是不允许加固梁围绕与该接头中自身对称的纵向轴线平行的轴线旋转。
详细显示的实施例提供一种平行运动的机器,该机器的万向节包括两个各自具有两个自由度的接头和一个具有三个自由度的接头,并且对于该机器的每个梁旋转轴承仅有一个自由度,即在该定位头处。
应该理解,根据本发明,所提供的加固梁的数量及其横截面尺寸可以改变。还应该理解,倘若梁旋转轴承与所述第一接头不同,则该第一接头,即关于定位头的调整装置接头的自由度数量也是可以改变的。
附图说明
现在将参照附图所示的示范性实施例更详细地描述本发明,其中:
图1图示了根据本发明的机器实施例;
图2图示了根据图1的机器的一个加固梁,以及连接的调整装置;
图3是图2中点F3处加固梁和调整装置的剖面图;
图4图示了机器的另一个加固梁,此梁根据图1可旋转,并且该图显示了连接的调整装置;
图5是图4中点F5处加固梁和调整装置的剖面图;
图6a)-e)示意性图示了根据本发明的五种不同基本类型的实施例;以及
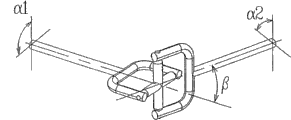
图7图示了具有两个自由度的万向接头(cardan joint)形式的万向节。
具体实施方式
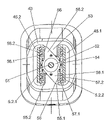
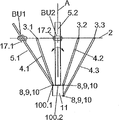
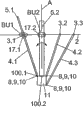
图1图示了根据本发明的平行运动的机器1的实施例。该机器包括底座2,其中三个单独的万向节3.1,3.2,3.3被安装在该底座中三个对应的穿透口中。调整装置4.1、4.2、4.3和加固梁或加固条5.1、5.2.1、5.2.2、5.3穿过每个万向节而延伸。当与调整装置相关的万向节和与加固梁相关的万向节不一致时,用作梁万向节的加固梁的万向节被标记为BU1、BU2、BU3。调整装置具有螺钉-螺母机构的形式,其中螺母与万向节刚性连接。调整装置的螺钉由安装在马达架7.1、7.2、7.3中的调整马达6.1、6.2、6.3来驱动,其中马达架在其一端具有第一接头的一个部件8,该部件8与接头的另一部件9联合动作以便围绕接头轴线10旋转。该接头的另一部件9与定位头11刚性连接。图1实施例中的第一接头8、9、10由此作为关于加固梁5.3的梁旋转轴承100.3,并且在此情况下,还作为仅具有一个自由度的铰链。其他马达架7.1、7.2通过各自的梁旋转轴承100.1、100.2与定位头对应连接。该定位头11于是通常与操纵头12、工具头13、工具连接装置14相连,从而实现工具在工作范围内移动。马达架7.1、7.2、7.3在两相对侧边还包括连接表面15,加固梁5.1、5.2.1、5.2.2、5.3紧靠并固定在连接表面15上。从图1中还可看到,底座具有用于容纳电缆等的介质窗16。
每个加固梁5.1、5.2、5.3被布置为,当伸长或缩短调整装置4.1、4.2、4.3时,在底座2中的梁轴承17.1、17.2.1、17.2.2、17.3中横向滑动。根据图1实施例的梁轴承17.1、17.2.1、17.2.2、17.3被布置在与各个调整装置的万向节3.1、3.2、3.3一致的梁万向节BU1、BU2、BU3中。
从图1中可见,调整装置之一,即第二调整装置4.2包括两个加固梁5.2.1、5.2.2,这两个加固梁被放置在该调整装置的与所述梁相连的相应侧上,并且通常被定向为与位于其他两个调整装置4.1、4.3上的其余两个加固梁5.1、5.3成直角。作为此加固梁复制的结果,该机器中的所有加固梁可设置为相同的尺寸,并受到同样大幅度的力。
图2显示了与加固梁5.1相结合的第一调整装置4.1,其与图1中第三调整装置4.3类似。万向节3.1包括外回转元件21,该外回转元件21被安装在底座中以便围绕外回转轴线22旋转,并且该外回转元件21进一步包括内回转元件23,该内回转元件23被安装在外回转元件21中以便围绕内回转轴线24旋转。加固梁5.1还穿过万向节中的回转窗25而延伸,其中调整装置4.1和加固梁5.1能够在万向节中作为一个单元同步移动。在这方面,加固梁5.1包括两个双滑杆形式的纵向延伸的第一滑动元件26,该第一滑动元件26以形状方式锁定到但各自可滑动地连接到相应的导轨的形式的第二滑动元件27上,该第二滑动元件27刚性连接到该内回转元件23上的。调整装置4.1的螺母28被刚性安装在内回转元件23中,而所述装置的螺钉旋转穿过该螺母,并且一端由支撑轴承29所支撑。
随着调整装置4.1的螺钉由调整马达6.1旋转,马达架7.1及其接头部件8将接近/退离万向节3.1以及底座,同时加固梁5.1可移动地安装在滑动元件27中,以便定位头将在工作范围内移动。在此情况下,各个调整装置的螺钉将作为定位头和底座之间的拉-压传递装置,而与调整装置连接的加固梁将作为承受弯曲应力和扭转应力并且在定位头和底座之间侧向地传递力的装置。
图3是在图2中位置F3处所取得的剖面图。图3显示该调整装置的螺钉31旋入其螺母28中,所述螺母被刚性安装在内回转元件23中,而内回转元件23反过来又被安装成在外回转元件21中围绕内回转轴线24旋转。该图更清楚地显示了该加固梁5.1的第一滑动元件26如何滑动地布置在且同时将形状控制在永久紧固在内回转元件23上的另外两个滑动元件27中。该图还清楚地显示了回转窗25。从该图中还可清楚地看到,加固梁5.1具有矩形横截面形状,这意味着梁在一第一方向上具有抗挠刚度,该抗挠刚度远远超过梁在与所述第一方向成直角的方向上的抗挠刚度。
图4图示了所述三个调整装置中的另外一个也是最后一个调整装置,还显示了与所述调整装置连接的两个加固梁5.2.1、5.2.2,所述梁在调整马达6.2和调整装置的各侧上与马达架7.2坚固地连接,在该图中,所述侧被一加固梁5.2.1所遮盖。该调整装置延伸穿过一内回转元件43,该内回转元件43对应于前面所述的元件,被安装为在外回转元件21中围绕内回转轴线46旋转,而外回转元件21反过来被安装为在所述底座中围绕外回转轴线47旋转。然而,内回转元件43包括第一回转窗45.1和第二回转窗45.2,两个加固梁5.2.1、5.2.2相互平行地各自延伸穿过该第一回转窗45.1和第二回转窗45.2。
图5是在图4中位置F5处所取得的剖面图。在图5例图中,调整装置的螺钉51与其螺母52螺纹啮合,该螺母52通过螺母壳54与内回转元件43中的中心腰部53刚性连接,所述腰部由该腰部各侧上的所述两个回转窗45.1、45.2形成。从该图中还可以看到,每个加固梁5.2.1、5.2.2通过两个倾斜元件55.1,55.2与内回转元件43连接,其中一个倾斜元件55.1被安装成,围绕内回转元件43一侧上的调整装置的螺钉51作倾斜运动,而另一个倾斜元件55.2被对应安装为,围绕内回转元件43另一侧上的所述调整装置的螺钉51作倾斜运动。每个倾斜元件55.1、55.2被安装在螺母壳54中,以便围绕调整装置的螺钉51进行倾斜运动。一个倾斜元件包括相对调整装置的螺钉51对角设置的第一基座臂56.1和第二基座臂56.2,并且其基座沿相反方向定向,以便第一基座臂56.1支撑一第二滑动元件57.1和一与一个加固梁5.2.1连接的第一滑动元件57.2,而第二基座臂56.2支撑一第二滑动元件58.1和一与第二加固梁5.2.2连接的第一滑动元件58.2。相应地,腰部53另一侧上的第二倾斜元件55.2被形成和定向为,每个加固梁5.2.1、5.2.2将如图5那样与腰部53各侧上的倾斜元件55.1、55.2两者都连接。因此,这两个加固梁5.2.1、5.2.2通过所述倾斜元件与内回转元件43连接。
图6a)-e)概略地图示了落入本发明范围内的五种不同基本类型的实施例。贯穿图6,使用与前面所述图中所使用的附图标记对应的附图标记,该子图表示本发明范围内的示意性的基本类型的实施例,其中该机器包括至少三个调整装置4.1、4.2、4.3,每个调整装置可以沿其纵向方向被伸长和缩短,并且其中每个调整装置通过第一接头8、9、10与定位头11相连接。每个调整装置4.1、4.2、4.3还通过万向节3.1、3.2、3.3与底座2相连接,所述定位头11可根据调整装置的操纵在工作范围内移动。至少两个加固梁5.1、5.2通过各自的梁旋转轴承100.1、100.2与定位头11相连接,每个梁旋转轴承仅有一个自由度,即所述轴承起到铰链的功能。每个加固梁5.1、5.2还被布置成随着一个或更多调整装置4.1、4.2、4.3被伸长或缩短,在底座2中的梁轴承17.1、17.2中横向滑动。如前所述,每个梁轴承17.1、17.2通过梁万向节BU1、BU2与底座2相连接。如图6a)-6e)中用双向箭头所示的,至少一个加固梁5.2的梁轴承17.2还可围绕与加固梁5.2的纵向轴线平行的轴线A旋转。
图6a)图示了第一基本类型实施例,其中调整装置(例如第一调整装置4.1)的第一接头8、9、10构成这样的接头,该接头与定位头11直接相连,并且与加固梁(例如第一加固梁5.1)的梁旋转轴颈100.1或100.2间隔开一定距离,所述轴颈也与定位头11直接相连。而且,底座2中的第一加固梁5.1的梁万向节BU1和梁轴承17.1与调整装置4.1、4.2、4.3的万向节3.1、3.2、3.3隔开一定距离,所述万向节与底座2刚性连接。
图6b)显示了第二基本类型的实施例,其中调整装置(例如第一调整装置4.1)的第一接头8、9、10构成这样的接头,该接头与定位头11直接连接。在此实施例中,加固梁(例如第一加固梁5.1)的梁旋转轴承100.1或100.2与该调整装置刚性连接,但与该调整装置的第一接头8、9、10间隔开。与图6a)所示实施例相对应,底座2中的第一加固梁5.1的梁万向节BU1和梁轴承17.1与调整装置4.1、4.2、4.3的万向节3.1、3.2、3.3隔开一定距离,所述万向节同样与底座2刚性连接。
图6c)显示了第三基本类型的实施例,其中调整装置(例如第一调整装置4.1)的第一接头8、9、10与加固梁(例如第一加固梁5.1)刚性连接。在此实施例中,加固梁5.1的梁旋转轴承100.1与定位头11直接连接。然而,该调整装置的第一接头8、9、10与梁旋转轴承100.1隔开一定距离。与图6a)和图6b)所示实施例相对应,底座2中的加固梁5.1的梁万向节BU1和梁轴承17.1与调整装置4.1、4.2、4.3的万向节3.1、3.2、3.3隔开一定距离,所述万向节与底座2刚性连接。
图6d)显示了第四基本类型的实施例,其中调整装置(例如第一调整装置4.1)的第一接头8、9、10和加固梁(例如第一加固梁5.1)的梁旋转轴承100.1、100.2构成与定位头11直接连接的同一接头。与图6a),6b)和6c)所示实施例相对应,底座2中的第一加固梁5.1的梁万向节BU1和梁轴承17.1与调整装置4.1、4.2、4.3的万向节3.1、3.2、3.3隔开一定距离,所述万向节与底座2刚性连接。
图6e)显示了第五基本类型的实施例,其中调整装置(例如第一调整装置4.1)的第一接头8、9、10和加固梁(例如第一加固梁5.1)的梁旋转轴承100.1、100.2构成与定位头11直接连接的同一接头。调整装置4.1、4.2、4.3的万向节3.1、3.2、3.3与底座2刚性连接,并且由所述加固梁的梁万向节和底座2中的梁轴承构成。因此,在此实施例中,该加固梁与所述调整装置一起移动。
此第五基本类型的实施例如上面参照图1-5通过介绍来详细描述的实施例那样,包括与加固梁相连的调整装置,该实施例属于第五基本类型的实施例。
梁万向节BU1和BU2通常被称作万向接头(cardan joint),其具有两个自由度,其中这种接头的运动性能使得外回转轴线22处的旋转角度与内回转轴线24的旋转由于其间存在角度而不同,此角度通常称为旋转角度差。当仅具有一个自由度的梁旋转轴承100.1、100.2彼此放置成直角位置时,关于BU1和BU2的旋转角度差彼此抵消,由此导致机器的运动锁定,除非允许至少一个加固梁旋转,如与图7相关的如下等式所示。
旋转角度差可以表示为:

其中β是外回转轴线和内回转轴线之间的角度,α1是外回转轴线的旋转,α2是内回转轴线的旋转。
Claims (22)
1.一种平行运动的机器(1),其包括至少三个调整装置(4.1,4.2,4.3),每个所述调整装置均可被单独地伸长或缩短,其中每个调整装置(4.1,4.2,4.3)通过一第一接头(8,9,10)与一定位头(11)连接,每个调整装置(4.1,4.2,4.3)通过一万向节(3.1,3.2,3.3)与底座(2)连接,并且所述定位头(11)可根据调整装置(4.1,4.2,4.3)的操纵在工作范围内移动,其特征在于:
所述平行运动的机器进一步包括:至少两个加固梁(5.1,5.2,5.2.1,5.2.2),其中的每个都通过相应的梁旋转轴承(100.1,100.2)与所述定位头(11)连接,每个梁旋转轴承仅具有一个自由度,其中当一个或更多的所述调整装置(4.1,4.2,4.3)被伸长或缩短时每个加固梁(5.1,5.2,5.2.1,5.2.2)适于在底座(2)的梁轴承(17.1,17.2,17.2.1,17.2.2)中横向滑动,每个梁轴承(17.1,17.2,17.2.1,17.2.2)通过梁万向节(BU1,BU2)与底座(2)连接,并且至少一个加固梁(5.2,5.2.1,5.2.2)的梁轴承(17.2,17.2.1,17.2.2)可围绕与所述加固梁(5.2,5.2.1,5.2.2)的纵向轴线平行延伸的轴线旋转。
2.根据权利要求1所述的平行运动的机器,其特征在于,至少一个梁旋转轴承(100.1,100.2)由所述第一接头(8,9,10)构成。
3.根据权利要求2所述的平行运动的机器,其特征在于,至少一个梁万向节(BU1,BU2)由一个万向节(3.1,3.2,3.3)构成。
4.根据权利要求1所述的平行运动的机器,其特征在于,至少一个加固梁(5.1,5.2,5.2.1,5.2.2)的梁旋转轴承(100.1,100.2)与调整装置(4.1,4.2,4.3)刚性连接。
5.根据权利要求1所述的平行运动的机器,其特征在于,至少一个调整装置(4.1,4.2,4.3)的第一接头(8,9,10)与加固梁(5.1,5.2,5.2.1,5.2.2)刚性连接。
6.根据权利要求1所述的平行运动的机器,其特征在于,所述万向节(3.1,3.2,3.3)和梁万向节(BU1,BU2)两者都包括外回转元件(21),该外回转元件(21)被安装在底座(2)中以便围绕外回转轴线(22,47)旋转,并且具有内回转元件(23,43),所述内回转元件(23,43)被安装在该外回转元件(21)中以便围绕与该外回转轴线(22,47)成直角的内回转轴线(24,46)旋转。
7.根据权利要求6所述的平行运动的机器,其特征在于,所述梁轴承(17.1,17.2)或者与万向节(3.1,3.2,3.3)的内回转元件(23,43)连接,或者与梁万向节(BU1,BU2)的内回转元件连接。
8.根据权利要求1所述的平行运动的机器,其特征在于,每个加固梁(5.1,5.2,5.2.1,5.2.2)在一第一方向上具有抗挠刚度,该抗挠刚度显著大于所述加固梁在与所述第一方向成直角的方向上的抗挠刚度。
9.根据权利要求8所述的平行运动的机器,其特征在于,每个加固梁(5.1,5.2,5.2.1,5.2.2)具有大致矩形的横截面形状。
10.根据权利要求1所述的平行运动的机器,其特征在于,所述机器包括三个调整装置(4.1,4.2,4.3),每个调整装置在所述第一接头(8,9,10)处在不存在任何中间接头或轴承的情况下与加固梁(5.1,5.2,5.2.1,5.2.2,5.3)刚性连接。
11.根据权利要求1所述的平行运动的机器,其特征在于,所述调整装置中的一个调整装置(4.2)与附加的加固梁(5.2.1,5.2.2)刚性连接。
12.根据权利要求6所述的平行运动的机器,其特征在于,至少一个调整装置(4.1,4.2,4.3)的形式为螺钉-螺母机构,其中螺钉或螺母(28,52)与内回转元件(23,43)刚性连接。
13.根据权利要求1所述的平行运动的机器,其特征在于,至少一个调整装置(4.1,4.2,4.3)的形式为线性马达。
14.根据权利要求13所述的平行运动的机器,其特征在于,所述线性马达的一部分由加固梁(5.1,5.2,5.2.1,5.2.2,5.3)构成。
15.根据权利要求6所述的平行运动的机器,其特征在于,
每个加固梁(5.1,5.2,5.2.1,5.2.2,5.3)包括至少一个纵向延伸的滑杆形式的第一滑动元件(26,57.2,58.2),所述第一滑动元件与导轨形式的第二滑动元件(27,57.1,58.1)以形状方式连接,所述第二滑动元件(27,57.1,58.1)与所述内回转元件(23,43)连接。
16.根据权利要求15所述的平行运动的机器,其特征在于,所述第二滑动元件(27,57.1,58.1)或者与内回转元件(23,43)固定连接,或者关于所述内回转元件(23,43)以形状方式导向。
17.根据权利要求12所述的平行运动的机器,其特征在于,所述螺钉-螺母机构的螺钉(31,51)适于在一端由调整装置马达(6.1,6.2,6.3)驱动,而所述螺钉的另一端由支撑轴承(29)支撑,或者所述螺钉-螺母机构的螺母(28,52)适于由调整装置马达(6)驱动。
18.根据权利要求17所述的平行运动的机器,其特征在于,所述调整装置马达(6.1,6.2,6.3)被安装在马达架(7.1,7.2,7.3)中,所述马达架的一端形成为所述第一接头(8,9,10)的一个部件(8),并且所述马达架还具有连接表面(15),至少一个加固梁(5.1,5.2.1,5.2.2,5.3)被紧固到所述连接表面上。
19.根据权利要求1所述的平行运动的机器,其特征在于,至少两个加固梁(5.1,5.2,5.2.1,5.2.2)的所述梁旋转轴承(100.1,100.2)具有被定向为彼此成直角的轴承轴线。
20.根据权利要求12所述的平行运动的机器,其特征在于,至少两个加固梁(5.1,5.3)的所述梁旋转轴承(100.1,100.3)具有被定向为彼此平行的轴承轴线。
21.根据权利要求6所述的平行运动的机器,其特征在于,两个加固梁(5.1,5.3)的所述梁万向节(BU1,BU3)的内回转轴线(24,46)与各个梁旋转轴承(100.1,100.3)的轴承轴线平行。
22.根据权利要求21所述的平行运动的机器,其特征在于,两个加固梁(5.1,5.3)的所述梁万向节(BU1,BU3)的内回转轴线(24)互相平行。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SE04028247 | 2004-11-18 | ||
| SE0402824A SE527873C2 (sv) | 2004-11-18 | 2004-11-18 | Parallellkinematisk maskin |
| SE0402824-7 | 2004-11-18 | ||
| PCT/SE2005/001651 WO2006054935A1 (en) | 2004-11-18 | 2005-11-03 | Parallel-kinematical machine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101155672A CN101155672A (zh) | 2008-04-02 |
| CN101155672B true CN101155672B (zh) | 2010-12-15 |
Family
ID=33516484
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2005800395787A Expired - Fee Related CN101155672B (zh) | 2004-11-18 | 2005-11-03 | 平行运动的机器 |
Country Status (22)
| Country | Link |
|---|---|
| US (1) | US8783127B2 (zh) |
| EP (1) | EP1838501B1 (zh) |
| JP (1) | JP4955568B2 (zh) |
| KR (1) | KR101227727B1 (zh) |
| CN (1) | CN101155672B (zh) |
| AT (1) | ATE496737T1 (zh) |
| AU (1) | AU2005307148B2 (zh) |
| BR (1) | BRPI0518431B1 (zh) |
| CA (1) | CA2587836C (zh) |
| DE (1) | DE602005026175D1 (zh) |
| DK (1) | DK1838501T3 (zh) |
| ES (1) | ES2358240T3 (zh) |
| IL (1) | IL183080A (zh) |
| MX (1) | MX2007006036A (zh) |
| MY (1) | MY141396A (zh) |
| PL (1) | PL1838501T3 (zh) |
| RU (1) | RU2395380C2 (zh) |
| SE (1) | SE527873C2 (zh) |
| SI (1) | SI1838501T1 (zh) |
| TW (1) | TWI345520B (zh) |
| WO (1) | WO2006054935A1 (zh) |
| ZA (1) | ZA200705062B (zh) |
Families Citing this family (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102006046758A1 (de) * | 2006-09-29 | 2008-04-03 | Abb Patent Gmbh | Vorrichtung insbesondere zum Positionieren von Objekten |
| KR101264800B1 (ko) * | 2007-11-26 | 2013-05-15 | 모터 파워 컴파니 에스.알.엘. | 물체를 핸들링하고 및/또는 물체에 작업을 수행하기 위한 장치 |
| JP2012529920A (ja) * | 2009-06-15 | 2012-11-29 | ディーエスエム アイピー アセッツ ビー.ブイ. | ヒンジ構造 |
| SE535182C2 (sv) * | 2010-06-17 | 2012-05-08 | Exechon Ab | En parallellkinematisk maskin med kardanhållare |
| CN101954593B (zh) * | 2010-09-07 | 2012-06-13 | 上海工程技术大学 | 用于虚轴机床和机器人的三转动并联机构 |
| CN101966502B (zh) * | 2010-10-15 | 2012-12-12 | 江苏长虹汽车装备集团有限公司 | 基于空间和平面三自由度并联机构的汽车喷涂混联机器人 |
| CN102114599B (zh) * | 2011-02-11 | 2012-08-08 | 上海工程技术大学 | 用于虚轴机床和机器人的解耦三转动并联机构 |
| US9764464B2 (en) * | 2011-08-03 | 2017-09-19 | The Boeing Company | Robot including telescopic assemblies for positioning an end effector |
| CN102672714B (zh) * | 2012-03-21 | 2014-05-21 | 天津大学 | 高刚度高精度五坐标并联动力头 |
| CN102632394B (zh) * | 2012-04-18 | 2013-12-11 | 浙江理工大学 | 具有两条垂直相交转轴的三自由度并联机构 |
| KR101419897B1 (ko) * | 2012-04-26 | 2014-07-15 | 고려대학교 산학협력단 | 병렬형 5자유도 마이크로 로봇 |
| CN102699899B (zh) * | 2012-06-06 | 2014-08-06 | 天津大学 | 过约束高刚度多坐标混联机器人 |
| CN102699900B (zh) * | 2012-06-06 | 2015-05-27 | 天津大学 | 含双平台的过约束五自由度混联机器人 |
| CN102922507A (zh) * | 2012-08-30 | 2013-02-13 | 南京理工大学 | 二自由度调平装置 |
| KR101382666B1 (ko) * | 2012-11-26 | 2014-04-07 | 양국진 | 병렬형 머니퓰레이터 |
| US20140150593A1 (en) | 2012-12-05 | 2014-06-05 | Alio Industries, Inc. | Precision tripod motion system |
| CN103029122B (zh) * | 2012-12-11 | 2015-03-11 | 北京交通大学 | 一种冗余驱动的三自由度平移型并联机器人机构 |
| CN103240614B (zh) * | 2013-05-06 | 2015-11-25 | 江苏国威工程机械有限公司 | 一种冗余驱动五轴联动混联机床 |
| CN103252774B (zh) * | 2013-05-07 | 2015-04-15 | 天津大学 | 一种空间五自由度混联机器人 |
| WO2014185877A2 (en) * | 2013-05-13 | 2014-11-20 | Coşkunöz Metal Form Maki̇na Endüstri̇ Ve Ti̇c. A.Ş. | A laser processing machine with a movement mechanism |
| CN103600346A (zh) * | 2013-11-25 | 2014-02-26 | 浙江理工大学 | 一种3自由度空间定位并联机构 |
| CN104384941B (zh) * | 2014-09-16 | 2016-08-17 | 燕山大学 | 具有等效Tricept机构运动的过约束并联机构 |
| ES2540925B1 (es) | 2015-05-27 | 2016-01-22 | Caviaroli, S.L. | Procedimiento de encapsulación de sustancias hidrófobas |
| CN105598478B (zh) * | 2016-03-24 | 2018-10-12 | 江苏中智自动化有限公司 | 一种高精度数控机床并联主轴头 |
| CN106378770B (zh) * | 2016-11-09 | 2018-10-02 | 南京理工大学 | 一种可实现两平一转的三自由度机器人机构 |
| CN106426102B (zh) * | 2016-11-09 | 2018-10-02 | 南京理工大学 | 一种具有三平两转的五自由度机器人机构 |
| CN108500953A (zh) * | 2018-02-28 | 2018-09-07 | 上海大学 | 一种含有动平台附加约束的五自由度精密串并联机器人 |
| CN108656092B (zh) * | 2018-08-07 | 2020-11-27 | 燕山大学 | 基于四支链两转动一移动并联机构的混联机器人 |
| CN109128872B (zh) * | 2018-09-26 | 2019-09-17 | 燕山大学 | 一种能够实现多方向定点转动的对称三轴并联主轴头 |
| CN110076444A (zh) * | 2019-04-30 | 2019-08-02 | 天津大学 | 一种用于搅拌摩擦焊接的两自由度并联机头 |
| CN110450142B (zh) * | 2019-09-09 | 2024-08-20 | 哈工大机器人(合肥)国际创新研究院 | 一种基于双陀螺仪部件的六自由度并联机器人 |
| RU2744148C1 (ru) * | 2019-12-16 | 2021-03-03 | Булат Азатович Еникеев | Станок с параллельной кинематикой повышенной виброустойчивости |
| CN113715003A (zh) * | 2021-09-16 | 2021-11-30 | 江南大学 | 具有两条异面转轴的rrp型两转一移并联机构 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4819496A (en) * | 1987-11-17 | 1989-04-11 | The United States Of America As Represented By The Secretary Of The Air Force | Six degrees of freedom micromanipulator |
| EP0925870A2 (de) * | 1997-12-24 | 1999-06-30 | Rolf Dipl.-Ing. Wissner | Vorrichtung zur Positionierung eines ersten Maschinenteils gegenüber einem zweiten Maschinenteil |
| US6497548B1 (en) * | 1999-08-05 | 2002-12-24 | Shambhu Nath Roy | Parallel kinematics mechanism with a concentric sperical joint |
| CN1511674A (zh) * | 2002-11-13 | 2004-07-14 | 德克尔・马霍普夫龙滕有限责任公司 | 机床 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US148216A (en) | 1874-03-03 | Improvement in suspenders | ||
| US4407625A (en) * | 1981-05-15 | 1983-10-04 | Westinghouse Electric Corp. | Multi-arm robot |
| US4569627A (en) | 1983-03-10 | 1986-02-11 | Simunovic Sergio N | Robotic manipulator |
| GB2143498B (en) | 1983-07-21 | 1986-04-30 | Emi Ltd | Improvements in or relating to assembly robots |
| JPS60122711A (ja) * | 1983-12-08 | 1985-07-01 | Oji Paper Co Ltd | 多孔質炭素板の製造方法 |
| SE452279B (sv) * | 1985-05-10 | 1987-11-23 | Neos Products Hb | Robot |
| EP0482268A1 (fr) * | 1990-10-24 | 1992-04-29 | Marc Lecomte | Module de guidage linéaire et de translation |
| JP3192678B2 (ja) * | 1991-04-30 | 2001-07-30 | キヤノン株式会社 | Zチルトアーム |
| KR0160676B1 (ko) * | 1995-02-20 | 1998-12-15 | 김광호 | 로보트 |
| JP3090257B2 (ja) * | 1996-11-11 | 2000-09-18 | キタムラ機械株式会社 | マシニングセンタ |
| SE512338C2 (sv) * | 1998-06-25 | 2000-02-28 | Neos Robotics Ab | System och metod för reglering av en robot |
| JP3731710B2 (ja) * | 1998-10-01 | 2006-01-05 | ファナック株式会社 | パラレルリンク機構の継手構造 |
| DE19952423A1 (de) * | 1999-10-30 | 2001-05-10 | Hueller Hille Gmbh | Bearbeitungsmaschine zum mehrachsigen Bewegen eines Werkzeuges oder Werkstückes |
| FR2800659B1 (fr) * | 1999-11-05 | 2002-01-18 | Process Conception Ing Sa | Dispositif de deplacement d'un objet sensiblement parallelement a un plan |
| JP4249530B2 (ja) * | 2003-04-11 | 2009-04-02 | 高松機械工業株式会社 | パラレルメカニズム利用の位置決め装置 |
| SE535182C2 (sv) * | 2010-06-17 | 2012-05-08 | Exechon Ab | En parallellkinematisk maskin med kardanhållare |
-
2004
- 2004-11-18 SE SE0402824A patent/SE527873C2/sv not_active IP Right Cessation
-
2005
- 2005-10-24 TW TW094137069A patent/TWI345520B/zh not_active IP Right Cessation
- 2005-11-03 KR KR1020077013693A patent/KR101227727B1/ko active IP Right Grant
- 2005-11-03 DK DK05799561.5T patent/DK1838501T3/da active
- 2005-11-03 EP EP05799561A patent/EP1838501B1/en active Active
- 2005-11-03 PL PL05799561T patent/PL1838501T3/pl unknown
- 2005-11-03 US US11/719,117 patent/US8783127B2/en active Active
- 2005-11-03 CN CN2005800395787A patent/CN101155672B/zh not_active Expired - Fee Related
- 2005-11-03 JP JP2007542969A patent/JP4955568B2/ja not_active Expired - Fee Related
- 2005-11-03 ES ES05799561T patent/ES2358240T3/es active Active
- 2005-11-03 WO PCT/SE2005/001651 patent/WO2006054935A1/en active Application Filing
- 2005-11-03 AT AT05799561T patent/ATE496737T1/de active
- 2005-11-03 MX MX2007006036A patent/MX2007006036A/es active IP Right Grant
- 2005-11-03 AU AU2005307148A patent/AU2005307148B2/en not_active Ceased
- 2005-11-03 BR BRPI0518431A patent/BRPI0518431B1/pt not_active IP Right Cessation
- 2005-11-03 CA CA2587836A patent/CA2587836C/en active Active
- 2005-11-03 SI SI200531228T patent/SI1838501T1/sl unknown
- 2005-11-03 DE DE602005026175T patent/DE602005026175D1/de active Active
- 2005-11-03 RU RU2007120945/02A patent/RU2395380C2/ru active
- 2005-11-07 MY MYPI20055214A patent/MY141396A/en unknown
-
2007
- 2007-05-09 IL IL183080A patent/IL183080A/en active IP Right Grant
- 2007-06-11 ZA ZA200705062A patent/ZA200705062B/xx unknown
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4819496A (en) * | 1987-11-17 | 1989-04-11 | The United States Of America As Represented By The Secretary Of The Air Force | Six degrees of freedom micromanipulator |
| EP0925870A2 (de) * | 1997-12-24 | 1999-06-30 | Rolf Dipl.-Ing. Wissner | Vorrichtung zur Positionierung eines ersten Maschinenteils gegenüber einem zweiten Maschinenteil |
| US6497548B1 (en) * | 1999-08-05 | 2002-12-24 | Shambhu Nath Roy | Parallel kinematics mechanism with a concentric sperical joint |
| CN1511674A (zh) * | 2002-11-13 | 2004-07-14 | 德克尔・马霍普夫龙滕有限责任公司 | 机床 |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101155672B (zh) | 平行运动的机器 | |
| AU2011265794B2 (en) | A parallel-kinematical machine with gimbal holders | |
| US20060241810A1 (en) | High stiffness, high accuracy, parallel kinematic, three degree of freedom motion platform | |
| JP4381812B2 (ja) | 柔軟な軌道の位置付け機 | |
| JP3743835B2 (ja) | 遠隔弾性中心機器 | |
| US7163247B2 (en) | Tool holder | |
| JP3905456B2 (ja) | 複合載荷試験装置 | |
| CN106799728A (zh) | 一种被动柔顺装置 | |
| CN106734420A (zh) | 一种空间管件柔性弯曲扭转成形装置 | |
| EP2509754A1 (en) | Connecting device for the connection of sections/girders/arms to an attachment | |
| CN221498222U (zh) | 一种双履带爬壁机器人的履带角度调节机构 | |
| CN218151774U (zh) | 液压作动系统 | |
| US20230173659A1 (en) | Compliant Mechanism for Improving Reaction Torque Sensing in Robotic Actuators | |
| DE19846355A1 (de) | Kreuzgelenk | |
| Talken et al. | Approximating Hinges With Multimaterial Compliant Joints | |
| KR20240112582A (ko) | 고중량을 다룰 수 있는 중력보상장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C41 | Transfer of patent application or patent right or utility model | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20160321 Address after: Sweden Sollentuna Patentee after: Love Xichong grams of Technology Holding Co. Address before: Sweden Sollentuna Patentee before: Eexchon AB |
|
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20101215 |