CN100522504C - 主·从式机械手系统及其操作输入装置 - Google Patents
主·从式机械手系统及其操作输入装置 Download PDFInfo
- Publication number
- CN100522504C CN100522504C CNB2006100824562A CN200610082456A CN100522504C CN 100522504 C CN100522504 C CN 100522504C CN B2006100824562 A CNB2006100824562 A CN B2006100824562A CN 200610082456 A CN200610082456 A CN 200610082456A CN 100522504 C CN100522504 C CN 100522504C
- Authority
- CN
- China
- Prior art keywords
- arm
- mentioned
- manipulator
- master
- joint
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J3/00—Manipulators of master-slave type, i.e. both controlling unit and controlled unit perform corresponding spatial movements
- B25J3/04—Manipulators of master-slave type, i.e. both controlling unit and controlled unit perform corresponding spatial movements involving servo mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/02—Hand grip control means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0004—Braking devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1674—Programme controls characterised by safety, monitoring, diagnostic
- B25J9/1676—Avoiding collision or forbidden zones
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
- B25J9/1689—Teleoperation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39088—Inhibit movement in one axis if collision danger
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39114—Hand eye cooperation, active camera on first arm follows movement of second arm
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40161—Visual display of machining, operation, remote viewing
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40181—Operator can fine position in small area, free, but if contact, force feedback
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40212—Two-way clutch for joint, prevents movement in unallowable direction
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40478—Graphic display of work area of robot, forbidden, permitted zone
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/45—Nc applications
- G05B2219/45118—Endoscopic, laparoscopic manipulator
Abstract
在主·从式机械手系统中,为了做成可在操作输入装置不使用电机的情况下在力反馈上提示障碍物及动作范围的限制,并且可靠性优异、小型且操作性良好的系统,该系统具备,具有臂的机械手(110、130)、使机械手(130)的臂动作的操作输入装置(190)、对机械手(110、130)及操作输入装置(190)进行控制的控制器(145、150)。操作输入装置(190)具备,在其关节上可对动力传递的切断和使动力传递接续的该动力传递接续方向进行选择的动作方向限制切换机构。
Description
技术领域
本发明涉及主·从式机械手系统及其操作输入装置。
背景技术
现已开发了很多主·从式机械手系统,这些系统由操作者对操作输入装置进行操作,机械手根据该操作进行动作。
可是,通常的主·从式机械手中,即使在机械手臂的动作范围内存在必须躲避通过的障碍物或不可进入的危险领域等,但是当把操作输入装置移动到与该障碍物或危险领域对应的位置上的话,机械手臂依然会碰到障碍物或者进入危险领域。
为了解决这类问题,特开平7-124876号公报(专利文献1)中,在与由于机械手臂而成为障碍物的位置相对应的操作输入装置的动作范围内配置了位置限制构件,以使操作输入装置不会移向禁止机械手臂移动的领域。
此外,特开2004-22328号公报(专利文献2)中,通过诊断装置预先取得机械手臂的动作范围信息,确定用于治疗的机械手臂可移动的领域,当操作者要使机械手臂在设定领域外动作时,通过配置在操作输入装置中的电机限制操作输入装置的可动范围,从而限制机械手臂向设定领域外动作。
另外,特开平11-333764号公报(专利文献3)中,在臂接触对象物时,使用动力传递可调装置对操作输入装置提示力反馈并使之感到阻力。
现有的主·从式机械手系统,为了不使操作输入装置在机械手臂不可移动的领域内移动,在操作输入装置中设置了致动器,通过把力返回给操作者以限制动作。可是,若在操作输入装置上设置致动器的话,操作输入装置大型化,而且有时会因故障等原因对操作者产生过大的力。
此外,如果在操作输入装置中,使用致动器在力反馈上表现动作范围及壁的话,则在感到臂的部分和可自由动作的部分的领域,还会出现控制复杂且容易产生振动性举动的问题。
另外,在不希望出现噪音等的环境下,使用通常的电机作为致动器有时也比较困难。例如,在使用MRI装置作为诊断装置的这种手术支援机械手系统中,操作输入装置使用电机时,由于产生MRI装置和噪音干涉,故难以利用。
再有,专利文献1,由于在操作输入装置中物理性配置了位置限制构件和接触元件以限制操作输入装置的动作范围,所以虽然不需要使用电机,但是当障碍物的位置或可动作范围经常变换时,难以对应。
专利文献2,是有关机械手臂可动作范围的设定方法,作为限制操作输入装置可动范围的方法,只能考虑使用电机。
专利文献3,是有关从属臂接触对象物时的操作输入装置的力反馈提示,其目的并不是回避障碍物或危险领域。此外,不与对象物接触的动作,虽然由于使用动力传递可调装置而不受电机的影响,但是机械手与对象物接触时,却使用电机的动力以提示力反馈。
发明内容
本发明的目的在于,提供可在操作输入装置不使用电机的情况下在力反馈上提示障碍物及动作范围的限制,并且可靠性优异、小型且操作性良好的主·从式机械手系统及其操作输入装置。
为了实现上述目的,本发明的第一形态是,在具备具有臂的机械手、使上述机械手的臂动作的操作输入装置、对上述机械手及上述操作输入装置进行控制的控制器的主·从式机械手系统中,上述操作输入装置,具备在其关节上可对动力传递的切断和使动力传递接续的该动力传递接续方向进行选择的动作方向限制切换机构。
适合这种本发明第一形态的比较理想的具体构成例如下所示。
(1)具有可取得上述机械手的臂的动作范围内的几何学信息及障碍物信息的传感器或者诊断装置,并具备根据由上述传感器或者上述诊断装置检测的上述机械手的臂的动作范围内的几何学信息及障碍物信息,对上述机械手的臂可动作的领域进行设定的手段,上述控制器,在要通过上述操作输入装置在上述机械手的臂不可动作的领域对上述机械手的臂进行操作时,利用可对配置在上述操作输入装置的各关节上的动力传递的切断和动力传递接续方向进行选择的机构,限制在上述机械手的臂不可移动的领域操作上述操作输入装置。
(2)可对配置在上述操作输入装置的各关节上的动力传递的切断和动力传递接续方向进行选择的机构,是使用双向离合器和三位置电磁线圈及齿条齿轮的直动关节机构。
(3)可对配置在上述操作输入装置的各关节上的动力传递的切断和动力传递接续方向进行选择的机构,是使用双向离合器和三位置电磁线圈及构成关节的两个连杆的旋转关节机构。
(4)上述操作输入装置,具备可对上述动力传递的切断和动力传递接续方向进行选择,并可任意限制握持开闭大小的握持开闭机构。
(5)使用MRI装置作为取得上述机械手的臂的动作范围内几何学信息的诊断装置。
(6)CT装置是作为取得上述机械手的臂的动作范围内几何学信息的诊断装置。
(7)上述控制器是控制上述动作方向限制切换机构的选择以限制上述机械手的臂的动作范围而构成。
(8)上述控制器,通过选择上述动力传递的切断和动力传递接续方向以精细地切换接续,从而提示上述机械手的臂接触对象物时的力反馈。
此外,本发明的第二形态,是在主·从式机械手系统中使机械手的臂动作的操作输入装置,其中具备在其关节上可对动力传递的切断和使动力传递接续的该动力传递接续方向进行选择的动作方向限制切换机构。
根据本发明,可以提供可在操作输入装置不使用电机的情况下在力反馈上提示障碍物及动作范围的限制,并且可靠性优异、小型且操作性良好的主·从式机械手系统及其操作输入装置。
附图说明
图1是表示本发明一实施形态的主·从式机械手系统的总体构成的概念图。
图2是图1中操作输入装置的概念图。
图3是图1中动作方向限制切换机构的概念图。
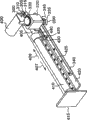
图4是把图1中动作方向限制切换机构用于直动关节的立体图。
图5是使用了图4的动作方向限制切换机构的操作输入装置的立体图。
图6是图5中握持输入装置打开状态的概念图。
图7是图5中握持输入装置闭合状态的概念图。
具体实施方式
以下,使用图1至图7说明本发明的一实施形态。
图1是表示本发明一实施形态的主·从式机械手系统的总体构成的概念图。本实施形态的机械手系统所举的例子是手术支援系统。
作为操作者的手术医生170,可以一边参照由第一机械手110保持的内视镜125所拍摄的手术器具135,一边使用操作输入装置190的输入界面165,对位于第二机械手130前端的手术器具135进行操作。参照显示器100所显示的图像,是用第一机械手110保持的内视镜125拍摄的患者140的患部,通常,手术器具135也与患部一起进入内视镜125的视野。此外,第一机械手110也可以与第二机械手130一样使用操作输入装置190的输入界面165使之动作。
患者140的患部的信息,可在手术前或手术中由诊断装置120取得,该信息被收集到位置信息综合控制器115。对于被位置信息综合控制器115取得的患部信息,通过输入界面116或者操作输入装置190的输入界面165,输入机械手110、130可动作的安全领域及机械手110、130不可运动的危险领域等。安全领域(可动作领域)及危险领域等信息,通过转换器105重合映在内视镜125的图像上,从而可在参照显示器100上进行提示。
机械手110、130的信息,被收集到从属控制器145,机械手110、130的位置姿势等信息,被送到位置信息综合控制器115。位置信息综合控制器115,对设定的安全领域及危险领域等信息和机械手110、130的当前位置的信息进行比较,当机械手110、130要离开安全领域或者要进入危险领域时,则计算出机械手110、130不可运动的方向,并把该信息发送给从属控制器145。从属控制器145把该信息发送给主控制器150。
主控制器150,在与机械手110、130不可运动的方向相对应的操作输入装置190的一个以上的关节175处,通过驱动电磁线圈185,对双向离合器180的动力传递进行接续,以约束操作输入装置190的输入界面165,不在机械手110、130不可运动的方向运动。
在通常的操作输入时,被安装在各关节175上的双向离合器180,处于动力传递被电磁线圈185切断的状态,手术医生170可使输入界面165自由运动。各关节175设有编码器及电位差计等传感器155,由传感器155取得的关节移动量信息被送至主控制器150。主控制器150,根据这些关节移动量信息,计算操作者170希望机械手110、130移动的方向和姿势量,并把信息发送给从属控制器145。从属控制器145,计算机械手110、130的逆运动学,驱动机械手110、130的各关节,从而使机械手110、130实现操作者170所希望的动作。由此,内视镜125及手术器具135可按照操作者170的意图动作。
此外,诊断装置120,为MRI装置、CT装置、超声波探头、激光测距器或内视镜等,可以用图像或CG等显示患部及其周围的信息。输入界面116,是由鼠标、操纵杆及键盘等构成的位置姿势输入装置。
另外,诊断装置120的诊断图像坐标系和机械手110、130的坐标系的统合,可以通过物理性地约束诊断装置120和机械手110、130的基座,或者用图中未显示的三维光学位置测量装置测量诊断装置120及机械手110、130,取得变换矩阵以进行坐标系的统合而实现。
图2是表示作为操作者的手术医生170利用操作输入装置190对机械手110、130进行操作的情况的图。
手术医生170,坐在椅子230上,肘或前腕放在肘托235上,握住作为输入界面165的握持部200,通过一边观察参照显示器100一边操作握持部200,可以移动参照显示器100上所显示的机械手或移动把图像送至参照显示器100的内视镜125的视野。
握持部200,经由多个连杆205、210、225、220、215等连接到操作桌240。各个连杆之间作为旋转关节或直动关节连接。通过在各个关节上适用后述的本实施形态的构成,可以使握持部200自由运动,或者限制向某方向运动。关于关节机构的详细内容,由图5说明。在图2中,握持部200,虽然只用图表示手术医生170右腕用的,但是作为同样输入界面165的握持部200也可以是左腕用。
此外,肘托235,虽然设在从操作桌240中央立柱延长的构件上,但是也可做成不与操作输入装置190的动作范围产生物理干涉的配置。在操作桌240的中央立柱和肘托235连接的构件上,设置了图中未显示的向操作输入装置190输入命令用的开关及信息提示用灯等。
图3是表示使用设于图1所示的操作输入装置190的各关节175的直动关节上的双向离合器180时的动力传递的切断和接续情况的图。在图3中,实线表示双向离合器180的动力传递被断开时的状态,虚线表示对向双向离合器180的任何一个方向的动力传递进行接续,相反方向的旋转因动力传递切断而自由旋转时的状态。此外,实线的各构成要素加下标a表示,虚线的各构成要素加下标b或c表示,同时对各构成要素进行总称时则省略下标a~c进行说明。
简单说明双向离合器180的特点。双向离合器180,具备支杆315、壳体320、轴承325。支杆315相对壳体320处于实线315a的状态时,配置在轴承325内径侧的轴330可自由旋转。支杆315在图示右侧旋转且支杆315相对壳体320处于右侧虚线315b的状态的话,则配置在轴承325内径侧的轴330,变成在箭头345方向不能旋转,而在箭头350侧可自由旋转的状态。支杆315在图示左侧旋转且支杆315相对壳体320处于左侧虚线315c的状态的话,则配置在轴承325内径侧的轴330,变成在箭头350方向不能旋转,而在箭头345侧可自由旋转的状态。
与杆300成一体的连杆305,具有长孔306,介于轴310与支杆315接续。轴310设置成与支杆315一体。当支杆310相对壳体320处于实线的支杆310a的状态时,配置在轴承325内径侧的轴330,可以自由旋转。轴330与同轴上的小齿轮335一致动作。此外,小齿轮335与齿条340啮合。齿条340固定,小齿轮335由于与该固定的齿条340啮合而受约束,所以壳体320在箭头355或360的方向上受到力作用时,若支杆315处于实线的支杆315a的状态的话,那么壳体320可以在箭头355或360的方向上自由移动。
实线的杆300a通过电磁线圈185等从左方加力而成为虚线的杆300b的状态时,与杆300b成一体的连杆305变为虚线的连杆305b的状态。这时,轴310一边在连杆305的长孔306内运动一边变成虚线的轴310b的状态,与轴310成一体的支杆315变为虚线的支杆315b的状态。这时,通过双向离合器180的作用,轴330及一体化而运动的小齿轮335不能在箭头345的方向上旋转,只能向箭头350方向旋转。为此,壳体320即使受到箭头360方向的力的作用,在箭头360方向上壳体320也不会动。另一方面,在箭头355方向可以自由运动。
相反,杆300a通过电磁线圈185(参照图1及图4)等从右方加力而处于虚线的杆300c的状态时,与杆300c成一体的连杆305变为虚线的连杆305c的状态。轴310一边在连杆305的长孔306内运动一边变成虚线的轴310c的状态,与轴310成一体的支杆315变为虚线的支杆315c的状态。这时,通过双向离合器的作用,轴330及一体化而运动的小齿轮335不能在箭头350的方向上旋转,只能向箭头345方向旋转。为此,壳体320即使受到箭头355方向的力的作用,在箭头355方向上壳体320也不会动。另一方面,在箭头360方向可以自由运动。
图4是使用图3双向离合器180的直动关节机构的一个轴的立体图。该直动关节机构是杆410相对基座420在箭头406、407方向上运动的直动关节机构,下一个关节的基座415以后,连结了若干个相同的关节机构,并与握持部200(参照图2)连接。
在基座420上固定了直线导轨425及齿条340。在直线导轨425上运动的导承430,安装了导座440。在导座440上,由杆固定件435对杆410进行固定,由离合器固定件405固定了壳体320。在壳体320上,固定了双向离合器及使双向离合器支杆运动的三位置电磁线圈400(相当于图1中的电磁线圈185)。三位置电磁线圈400,可以把杆300移动及保持为图3所示的三个状态(杆300a、300b、300c)。
当手术医生170输入的力通过握持部200(参照图2)传到下一个关节的基座415上的话,那么在该关节上将受到沿着箭头406或407方向的力作用。如果三位置电磁线圈400在实线的杆300a的状态下保持杆300的话,那么双向离合器的动力传递切断,轴330及小齿轮335可以自由旋转。这样小齿轮335,由于可以一边在齿条340上自由旋转一边运动,所以与作用于下一个关节基座415上的力对应,导承430可以在直线导轨425上沿箭头406或407方向自由移动。
另一方面,设手术医生170输入的力通过握持部200(参照图2)传到下一个关节的基座415上,箭头406方向的力作用于该关节上。这时,使操作输入装置190在箭头406方向运动的话,那么假设在与之对应而运动的机械手110或130的方向上有危险领域,并且由主控制器150(参照图1)计算出不可使机械手110或130在该方向运动,这时,主控制器150,发出驱动三位置电磁线圈400的信号,使支杆315运动并对双向离合器的动力传递功能进行接续,同时使小齿轮335不能在箭头345方向旋转而可在箭头350方向旋转。由此,导承430,通过小齿轮335和齿条340的啮合,可在箭头407方向上运动,但是不能在箭头406方向运动。因此,手术医生170,可以在安全侧的箭头407方向上进行操作输入,但不能在朝向危险领域的箭头406方向进行操作输入,从而可以解决把机械手110或130移动到危险领域的问题。
同样,设箭头407方向的力作用于下一个关节的基座415上,这时,若使操作输入装置190运动到箭头407方向上的话,那么设在与之对应而运动的机械手110或130的方向上有危险领域,并且由主控制器150(参照图1)计算出不可使机械手在该方向运动。这时,主控制器150,发出驱动三位置电磁线圈400的信号,使支杆315运动并对双向离合器的动力传递功能进行接续,同时使小齿轮335不能在箭头350方向旋转而可在箭头345方向旋转。由此,导承430,通过小齿轮335和齿条340的啮合,可在箭头406方向上运动,但是不能在箭头407方向运动。
此外,虽然图中未显示,但是该关节的移动量可由线性编码器测定,并可用主控制器150取得操作输入量。
图5是表示省略了操作桌240后的本实施形态的操作输入装置190全貌的图。
在图2所示的操作桌240的背面安装了基座585。为了使基座575在基座585背面所固定的直线导轨580上在作为左右方向的箭头578方向上运动,基座575和直线导轨580介于直动关节而连接。在箭头578方向上运动的该直动关节上还安装了被基座585挡住而看不见的本发明的动作方向限制切换机构。
杆560,相对基座575,介于与被安装在基座575上的齿条570啮合的动作方向限制切换机构565,在作为上下方向的箭头563方向上直动。杆560介于固定件555被固定在基座550上。
杆535,相对基座550,介于与被固定在基座550上的齿条545啮合的动作方向限制切换机构540,在作为前后方向的箭头537方向上直动。
安装在杆535上的固定件530介于轴525与连杆520接续,连杆520介于轴525成为旋转关节。连杆520把轴515作为旋转轴与连杆510接续,连杆510介于轴505与握持部200接续。
图5的操作输入装置190,由三个直动关节和三个旋转关节构成,手术医生可以输入六个位置姿势自由度。此外,握持部200,具有图6所说明的手术器具的开闭关节。
在与箭头563、537对应的直动关节上,为了补偿操作输入装置的自重,配置了图中未显示的定载荷弹簧。因此,手术医生170在抓住握持部220进行操作时,可以不必在意操作输入装置190的自重,进行自由操作。
在图5中,在作为旋转关节的轴525、515、505上,虽然图中没有表示动作方向限制切换机构,但是通过把图3的轴330作为关节轴、把壳体220固定在基座的连杆上,并且把下一个关节的连杆固定在轴330上以替代小齿轮350,则可以实现动作方向限制切换机构。
在图5中,通过把动作方向限制切换机构只用于三个直动关节,可以自由输入姿势,并只对位置输入进行限制。还可通过在三个旋转关节上加上动作方向限制切换机构,以限制六个位置姿势的自由度。
图6及图7是表示本实施形态的握持部220不同动作状态的俯视图。在握持部200移动的构成要素的符号中,在图6的状态下加下标a表示,在图7的状态下加下标b表示,同时对各构成要素进行总称时则省略下标a~b进行说明。
该握持部200,是将食指和拇指按在翼片625、640上,可对手术器具135的开闭操作进行输入的机构。该握持部200的特点是,相对基座630,即使只按动翼片640,翼片625也能对称动作,相反即使按动翼片625,翼片640也同样地动作。由此,开闭操作,可适合习惯只用拇指的人、习惯只用食指的人、或者习惯用两个指头的人用这三种方法使用。
在与基座630成一体的凸轮座605上,形成了凸轮盘610可直动的孔606。轴615是翼片625、640的中心转轴,穿过基座630成为动作方向限制切换机构645的轴。轴615,通过事先设置成与翼片625一体旋转的形式,可以利用动作方向限制切换机构645限制翼片开闭的角度。动作方向限制切换机构645包含三位置电磁线圈600。此外,还构成为利用图中未显示的编码器可取得翼片开闭的角度。
此外,轴615穿过凸轮盘610的凸轮孔651。在凸轮盘610的凸轮孔651上,与翼片640成一体的轴650和与翼片625成一体的轴620分别穿过。
图6的翼片640a如图7翼片640b那样在闭合方向受力作用的话,那么翼片640a以轴615为中心旋转,与翼片640a成一体而运动的轴650a也以轴615为旋转中心而运动。轴650a穿过凸轮孔651a并像图7凸轮盘610b那样使图6的凸轮盘610a运动。由于凸轮盘610a像凸轮盘610b那样运动,通过凸轮孔651a对轴620a施加变成轴620b的方向的力,与轴620a成一体的翼片625a成为翼片625b。
在本实施形态中,由于是同时对两片翼片进行开闭的机构,所以与现有的使用普通的平行连杆的机构等相比,结构简单,制作成本低。
另外,通过使用动作方向限制切换机构645,可以限制握持开闭的大小,或者维持闭合的状态等。在使用手术器具翼片640、625夹住或放开患部的动作中,当希望限制打开手术器具135的量时,可以限制手术器具翼片640、625开闭的大小,所以有助于提高安全性。此外,由于可以维持闭合的状态,所以手术医生170在握住针等对象物的状态下,无须用力握紧,由此,减少了疲劳。还有,翼片640、625,利用图中未显示的弹簧,通常处于图6所示的开放状态。
开闭基座630配置了微型开关635,通过用力把翼片640a压成640b的状态,微型开关635产生反应。在本实施形态中,构成为微型开关635反应时,动作方向限制切换机构645起作用,翼片640、625保持在闭合的状态。此外,为了解除翼片640、625闭合的状态,可以通过用手指按下图中未显示的另外的按键来实现。
在限制手术器具开闭量时,预先利用输入界面116输入最大开闭量,使用动作方向限制切换机构645实现。
此外,在动作方向限制切换机构645中,通过用主控制器150控制动力传递的接续方向和断开,不仅可表现障碍物及危险领域的壁,而且可以在力反馈上提示机械手臂接触到对象物时的柔软度及硬度。也就是说,控制器150,通过选择动力传递的切断和动力传递接续方向以精细地切换接续,可以提示机械手110或130的臂接触到对象物时的力反馈。
如上所述,利用本实施形态的话,在不需要提示安全领域及危险领域等情况时,可以自由地使操作输入装置190运动;当需要提示安全领域及危险领域等情况时,可以不使用电机地限制向危险领域方向的运动,从而可以实现向安全领域方向的自由动作。并且,操作输入装置190,可不使用电机地在力反馈上提示限制手术医生的动作范围及障碍物,在小型化及控制安全性方面非常有效,并可做成操作性好的操作输入装置190。此外,由于没有电机,在使用MRI装置等希望降低噪音影响的环境下,是非常有效的。进而,由于没有电机,故制造成本低。
此外,在手术器具135的开闭操作中,还可以实现例如在由手术器具135夹住或放开的动作中限制手术器具135的打开量,或者减轻使手术器具135闭合时抓紧握持部200而造成的疲劳,从而可以提高操作性。
另外,在本实施形态中,虽然使用了双向离合器作为实现动作方向限制切换机构的动力传递的断开和接续机构,但是也可以使用各两个单向离合器及电磁线圈来实现。
在本实施形态中,介绍了手术支援机械手的操作输入装置,但是本发明还可以作为仿人的臂及产业用机械手的臂等的操作输入装置加以实用。
Claims (8)
1.一种主·从式机械手系统,具备:具有臂的机械手,
操作输入装置,在该操作输入装置上操作器输入用于使上述机械手的臂动作的操作,
对上述机械手及上述操作输入装置进行控制的控制器,
其中,上述操作输入装置在关节上具备动作方向限制切换机构,该动作方向限制切换机构具有如下的模式并且选择其中一个模式而从一个模式切换到所选择的模式,其中
在一个模式中,在关节上一个方向上的动作是自由的,
在另一个模式中,在关节上一个方向上的动作是被限制的,
其特征在于,具有可取得上述机械手的臂的动作范围内的几何学信息及障碍物信息的传感器或者诊断装置,并具备根据由上述传感器或者上述诊断装置检测的上述机械手的臂的动作范围内的几何学信息及障碍物信息,对上述机械手的臂可动作的领域进行设定的手段,上述控制器,在上述机械手的臂不可动作的领域对上述机械手的臂进行操作时,利用配置在上述操作输入装置的各关节上的所述动作方向限制切换机构,限制在上述机械手的臂不可移动的领域操作上述操作输入装置,
配置在上述操作输入装置的各关节上的上述动作方向限制切换机构包括双向离合器。
2.如权利要求1所述的主·从式机械手系统,其特征在于,上述动作方向限制切换机构还包括三位置电磁线圈及齿条齿轮的直动关节机构。
3.如权利要求1或2所述的主·从式机械手系统,其特征在于,上述动作方向限制切换机构还包括三位置电磁线圈及构成关节的两个连杆的旋转关节机构。
4.如权利要求1所述的主·从式机械手系统,其特征在于,上述操作输入装置具备,带有上述动作方向限制切换机构的功能,并可任意限制握持的开闭大小的握持开闭机构。
5.如权利要求1所述的主·从式机械手系统,其特征在于,使用MRI装置作为取得上述机械手的臂的动作范围内几何学信息的诊断装置。
6.如权利要求1所述的主·从式机械手系统,其特征在于,CT装置是作为取得上述机械手的臂的动作范围内几何学信息的诊断装置。
7.如权利要求1所述的主·从式机械手系统,其特征在于,上述控制器控制上述动作方向限制切换机构的选择以限制上述机械手的臂的动作范围。
8.如权利要求1所述的主·从式机械手系统,其特征在于,上述控制器,通过多次并且以多种负荷比选择上述动作方向限制切换机构的模式,用来精细地切换接续,从而当上述机械手的臂接触对象物时提示力反馈。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005147786A JP2006321027A (ja) | 2005-05-20 | 2005-05-20 | マスタ・スレーブ式マニピュレータシステム及びその操作入力装置 |
| JP2005147786 | 2005-05-20 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1864938A CN1864938A (zh) | 2006-11-22 |
| CN100522504C true CN100522504C (zh) | 2009-08-05 |
Family
ID=36758241
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB2006100824562A Expired - Fee Related CN100522504C (zh) | 2005-05-20 | 2006-05-19 | 主·从式机械手系统及其操作输入装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7391177B2 (zh) |
| EP (1) | EP1724071A1 (zh) |
| JP (1) | JP2006321027A (zh) |
| CN (1) | CN100522504C (zh) |
Families Citing this family (92)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8944070B2 (en) | 1999-04-07 | 2015-02-03 | Intuitive Surgical Operations, Inc. | Non-force reflecting method for providing tool force information to a user of a telesurgical system |
| US9789608B2 (en) | 2006-06-29 | 2017-10-17 | Intuitive Surgical Operations, Inc. | Synthetic representation of a surgical robot |
| JP5322648B2 (ja) * | 2005-10-20 | 2013-10-23 | インテュイティブ サージカル, インコーポレイテッド | 医療用ロボットシステムにおけるコンピュータディスプレイ上の補助画像の表示および操作 |
| KR101477121B1 (ko) * | 2006-06-13 | 2014-12-29 | 인튜어티브 서지컬 인코포레이티드 | 미소절개 수술 시스템 |
| US20090192523A1 (en) | 2006-06-29 | 2009-07-30 | Intuitive Surgical, Inc. | Synthetic representation of a surgical instrument |
| US10258425B2 (en) | 2008-06-27 | 2019-04-16 | Intuitive Surgical Operations, Inc. | Medical robotic system providing an auxiliary view of articulatable instruments extending out of a distal end of an entry guide |
| US10008017B2 (en) | 2006-06-29 | 2018-06-26 | Intuitive Surgical Operations, Inc. | Rendering tool information as graphic overlays on displayed images of tools |
| US9718190B2 (en) * | 2006-06-29 | 2017-08-01 | Intuitive Surgical Operations, Inc. | Tool position and identification indicator displayed in a boundary area of a computer display screen |
| JP4911701B2 (ja) * | 2007-01-19 | 2012-04-04 | 株式会社日立製作所 | マスタ・スレーブ式マニピュレータシステム |
| JP4891823B2 (ja) * | 2007-03-29 | 2012-03-07 | オリンパスメディカルシステムズ株式会社 | 内視鏡装置 |
| US9089256B2 (en) | 2008-06-27 | 2015-07-28 | Intuitive Surgical Operations, Inc. | Medical robotic system providing an auxiliary view including range of motion limitations for articulatable instruments extending out of a distal end of an entry guide |
| US9469034B2 (en) | 2007-06-13 | 2016-10-18 | Intuitive Surgical Operations, Inc. | Method and system for switching modes of a robotic system |
| US9084623B2 (en) | 2009-08-15 | 2015-07-21 | Intuitive Surgical Operations, Inc. | Controller assisted reconfiguration of an articulated instrument during movement into and out of an entry guide |
| US8903546B2 (en) | 2009-08-15 | 2014-12-02 | Intuitive Surgical Operations, Inc. | Smooth control of an articulated instrument across areas with different work space conditions |
| US9138129B2 (en) | 2007-06-13 | 2015-09-22 | Intuitive Surgical Operations, Inc. | Method and system for moving a plurality of articulated instruments in tandem back towards an entry guide |
| US8620473B2 (en) | 2007-06-13 | 2013-12-31 | Intuitive Surgical Operations, Inc. | Medical robotic system with coupled control modes |
| JP5209903B2 (ja) * | 2007-06-18 | 2013-06-12 | オリンパスメディカルシステムズ株式会社 | 電動湾曲内視鏡用動力伝達装置 |
| JP5024763B2 (ja) * | 2007-11-30 | 2012-09-12 | 国立大学法人 東京大学 | 手術支援システムにおいて用いられるマスタ・マニピュレータ |
| US8864652B2 (en) * | 2008-06-27 | 2014-10-21 | Intuitive Surgical Operations, Inc. | Medical robotic system providing computer generated auxiliary views of a camera instrument for controlling the positioning and orienting of its tip |
| US8332072B1 (en) | 2008-08-22 | 2012-12-11 | Titan Medical Inc. | Robotic hand controller |
| US8918211B2 (en) | 2010-02-12 | 2014-12-23 | Intuitive Surgical Operations, Inc. | Medical robotic system providing sensory feedback indicating a difference between a commanded state and a preferred pose of an articulated instrument |
| US9492927B2 (en) | 2009-08-15 | 2016-11-15 | Intuitive Surgical Operations, Inc. | Application of force feedback on an input device to urge its operator to command an articulated instrument to a preferred pose |
| WO2012073789A1 (ja) | 2010-11-30 | 2012-06-07 | オリンパス株式会社 | マスタ操作入力装置及びマスタスレーブマニピュレータ |
| US9119655B2 (en) | 2012-08-03 | 2015-09-01 | Stryker Corporation | Surgical manipulator capable of controlling a surgical instrument in multiple modes |
| JP5669590B2 (ja) * | 2011-01-20 | 2015-02-12 | オリンパス株式会社 | マスタスレーブマニピュレータ及び医療用マスタスレーブマニピュレータ |
| JP2012171088A (ja) * | 2011-02-24 | 2012-09-10 | Olympus Corp | マスタ操作入力装置及びマスタスレーブマニピュレータ |
| EP2713922B1 (en) * | 2011-05-31 | 2021-08-11 | Intuitive Surgical Operations, Inc. | Positive control of robotic surgical instrument end effector |
| EP2732344B1 (en) | 2011-07-11 | 2019-06-05 | Board of Regents of the University of Nebraska | Robotic surgical system |
| US9161772B2 (en) | 2011-08-04 | 2015-10-20 | Olympus Corporation | Surgical instrument and medical manipulator |
| JP5931497B2 (ja) | 2011-08-04 | 2016-06-08 | オリンパス株式会社 | 手術支援装置およびその組立方法 |
| EP2740434A4 (en) | 2011-08-04 | 2015-03-18 | Olympus Corp | MEDICAL MANIPULATOR AND CONTROL METHOD THEREOF |
| JP5855656B2 (ja) * | 2011-08-04 | 2016-02-09 | オリンパス株式会社 | 医療用マニピュレータおよびその作動方法 |
| JP6005950B2 (ja) | 2011-08-04 | 2016-10-12 | オリンパス株式会社 | 手術支援装置及びその制御方法 |
| JP6009840B2 (ja) | 2011-08-04 | 2016-10-19 | オリンパス株式会社 | 医療機器 |
| JP5936914B2 (ja) | 2011-08-04 | 2016-06-22 | オリンパス株式会社 | 操作入力装置およびこれを備えるマニピュレータシステム |
| JP6021353B2 (ja) | 2011-08-04 | 2016-11-09 | オリンパス株式会社 | 手術支援装置 |
| JP6081061B2 (ja) | 2011-08-04 | 2017-02-15 | オリンパス株式会社 | 手術支援装置 |
| JP6021484B2 (ja) | 2011-08-04 | 2016-11-09 | オリンパス株式会社 | 医療用マニピュレータ |
| CN103648425B (zh) | 2011-08-04 | 2016-10-19 | 奥林巴斯株式会社 | 医疗用机械手和手术支援装置 |
| JP5841451B2 (ja) | 2011-08-04 | 2016-01-13 | オリンパス株式会社 | 手術器具およびその制御方法 |
| JP6000641B2 (ja) | 2011-08-04 | 2016-10-05 | オリンパス株式会社 | マニピュレータシステム |
| JP5953058B2 (ja) | 2011-08-04 | 2016-07-13 | オリンパス株式会社 | 手術支援装置およびその着脱方法 |
| EP2814644B1 (en) * | 2012-02-15 | 2020-06-24 | Intuitive Surgical Operations, Inc. | Switching control of an instrument to an input device upon the instrument entering a display area viewable by an operator of the input device |
| EP4357083A2 (en) | 2012-05-01 | 2024-04-24 | Board of Regents of the University of Nebraska | Single site robotic device and related systems and methods |
| KR102397265B1 (ko) | 2012-08-03 | 2022-05-12 | 스트리커 코포레이션 | 로봇 수술을 위한 시스템 및 방법 |
| US9226796B2 (en) | 2012-08-03 | 2016-01-05 | Stryker Corporation | Method for detecting a disturbance as an energy applicator of a surgical instrument traverses a cutting path |
| EP2882331A4 (en) | 2012-08-08 | 2016-03-23 | Univ Nebraska | ROBOTIC SURGICAL DEVICES, SYSTEMS AND CORRESPONDING METHODS |
| CN103085055B (zh) * | 2013-01-29 | 2016-06-22 | 山东电力集团公司电力科学研究院 | 带电抢修机器人位置反馈主手系统 |
| US10507066B2 (en) | 2013-02-15 | 2019-12-17 | Intuitive Surgical Operations, Inc. | Providing information of tools by filtering image areas adjacent to or on displayed images of the tools |
| CN105188511B (zh) * | 2013-03-29 | 2017-08-15 | 奥林巴斯株式会社 | 主从系统及其驱动方法 |
| JP6479790B2 (ja) | 2013-07-17 | 2019-03-06 | ボード オブ リージェンツ オブ ザ ユニバーシティ オブ ネブラスカ | ロボット外科的デバイス、システムおよび関連する方法 |
| JP6164964B2 (ja) * | 2013-07-26 | 2017-07-19 | オリンパス株式会社 | 医療用システムおよびその制御方法 |
| JP6358463B2 (ja) * | 2013-11-13 | 2018-07-18 | パナソニックIpマネジメント株式会社 | マスタースレーブ装置用マスター装置及びその制御方法、及び、マスタースレーブ装置 |
| WO2015142512A1 (en) * | 2014-03-17 | 2015-09-24 | Intuitive Surgical Operations, Inc. | Structural adjustment systems and methods for a teleoperational medical system |
| KR102455799B1 (ko) | 2014-03-31 | 2022-10-18 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 시프트 가능한 트랜스미션을 가진 수술 기구 |
| EP3125812B1 (en) | 2014-04-01 | 2019-01-23 | Intuitive Surgical Operations, Inc. | Control input accuracy for teleoperated surgical instrument |
| US10660717B2 (en) | 2014-04-24 | 2020-05-26 | Covidien Lp | Robotic interface positioning determination systems and methods |
| EP3177436B1 (en) * | 2014-08-08 | 2018-12-26 | BBZ S.r.l. | Remote manipulation input device |
| US9592608B1 (en) | 2014-12-15 | 2017-03-14 | X Development Llc | Methods and systems for providing feedback during teach mode |
| EP3273896A4 (en) * | 2015-03-26 | 2018-10-31 | Covidien LP | Input device assemblies for robotic surgical systems |
| CN113017841A (zh) | 2015-06-16 | 2021-06-25 | 提坦医疗公司 | 用于在机器人手术系统中接收操作员输入的手柄设备 |
| JP6520478B2 (ja) * | 2015-06-30 | 2019-05-29 | 株式会社デンソーウェーブ | ロボットアームの操作システム |
| JP6961146B2 (ja) | 2015-08-03 | 2021-11-05 | バーチャル インシジョン コーポレイションVirtual Incision Corporation | ロボット外科的デバイス、システムおよび関連する方法 |
| WO2017031132A1 (en) | 2015-08-17 | 2017-02-23 | Intuitive Surgical Operations, Inc. | Unground master control devices and methods of use |
| AU2016341284A1 (en) * | 2015-10-22 | 2018-04-12 | Covidien Lp | Variable sweeping for input devices |
| JP6660157B2 (ja) * | 2015-11-16 | 2020-03-11 | 川崎重工業株式会社 | ロボット及びロボットによる作業方法 |
| US9919422B1 (en) * | 2016-01-06 | 2018-03-20 | X Development Llc | Methods and systems to provide mechanical feedback during movement of a robotic system |
| CN108472086B (zh) * | 2016-02-26 | 2021-07-09 | 直观外科手术操作公司 | 使用虚拟边界避免碰撞的系统和方法 |
| JP2017176307A (ja) * | 2016-03-29 | 2017-10-05 | ソニー株式会社 | 医療用支持アームの制御装置、医療用支持アーム装置の制御方法及び医療用システム |
| TWI595986B (zh) * | 2016-04-19 | 2017-08-21 | Hiwin Tech Corp | Endoscopic movement control method driven by a mechanical arm |
| JP7176757B2 (ja) | 2016-05-18 | 2022-11-22 | バーチャル インシジョン コーポレイション | ロボット手術装置、システム及び関連する方法 |
| CN109195543A (zh) | 2016-06-03 | 2019-01-11 | 柯惠Lp公司 | 用于机器人手术系统的被动轴系统 |
| AU2017275595B2 (en) | 2016-06-03 | 2021-04-29 | Covidien Lp | Control arm assemblies for robotic surgical systems |
| EP3463150B1 (en) | 2016-06-03 | 2023-09-27 | Covidien LP | Control arm for robotic surgical systems |
| WO2018112025A1 (en) | 2016-12-16 | 2018-06-21 | Mako Surgical Corp. | Techniques for modifying tool operation in a surgical robotic system based on comparing actual and commanded states of the tool relative to a surgical site |
| JP2018198750A (ja) * | 2017-05-26 | 2018-12-20 | ソニー株式会社 | 医療用システム、医療用支持アームの制御装置、および医療用支持アームの制御方法 |
| WO2019099584A1 (en) * | 2017-11-15 | 2019-05-23 | Intuitive Surgical Operations, Inc. | Master control device and methods therefor |
| WO2019099504A1 (en) * | 2017-11-15 | 2019-05-23 | Intuitive Surgical Operations, Inc. | Master control device with multi-finger grip and methods therefor |
| JP6936712B2 (ja) * | 2017-11-24 | 2021-09-22 | 川崎重工業株式会社 | 操作装置 |
| EP3735341A4 (en) | 2018-01-05 | 2021-10-06 | Board of Regents of the University of Nebraska | ROBOTIC DEVICE HAVING A SINGLE ARM OF A COMPACT JOINT DESIGN AND RELATED SYSTEMS AND PROCESSES |
| US11116591B2 (en) | 2018-10-30 | 2021-09-14 | Titan Medical Inc. | Hand controller apparatus including ergonomic features for a robotic surgery system |
| US10758311B2 (en) * | 2018-10-30 | 2020-09-01 | Titan Medical Inc. | Hand controller apparatus for gesture control and shared input control in a robotic surgery system |
| US11166769B2 (en) | 2018-10-30 | 2021-11-09 | Titan Medical Inc. | Hand controller apparatus with feedback responsive to function change in a robotic surgery system |
| US10426561B1 (en) | 2018-10-30 | 2019-10-01 | Titan Medical Inc. | Hand controller apparatus for detecting input position in a robotic surgery system |
| CA3125742A1 (en) | 2019-01-07 | 2020-07-16 | Virtual Incision Corporation | Robotically assisted surgical system and related devices and methods |
| JP2020049300A (ja) * | 2019-12-25 | 2020-04-02 | 株式会社メディカロイド | 遠隔操作装置及び遠隔手術システム |
| KR102261262B1 (ko) * | 2020-04-22 | 2021-06-07 | 주식회사 이지엔도서지컬 | 슬레이브 장치를 조종하기 위한 마스터 장치 |
| CN111730598B (zh) * | 2020-07-06 | 2022-01-04 | 武汉联影智融医疗科技有限公司 | 一种机器人力位连锁控制方法、装置及系统 |
| CN112716608B (zh) * | 2021-01-20 | 2022-06-24 | 山东威高手术机器人有限公司 | 用于微创手术机器人的主从跟踪控制方法 |
| WO2023112732A1 (ja) * | 2021-12-13 | 2023-06-22 | ソニーグループ株式会社 | ロボットシステム及び座標統合方法 |
| CN114789432B (zh) * | 2022-03-31 | 2023-08-29 | 西安交通大学 | 一种面向建筑板材安装的双臂机器人力位混合控制方法 |
| CN114770458B (zh) * | 2022-04-28 | 2023-09-15 | 燕山大学 | 冗余自由度遥操作机器人主-从双向控制方法及系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5399951A (en) * | 1992-05-12 | 1995-03-21 | Universite Joseph Fourier | Robot for guiding movements and control method thereof |
| US6233504B1 (en) * | 1998-04-16 | 2001-05-15 | California Institute Of Technology | Tool actuation and force feedback on robot-assisted microsurgery system |
| US6437771B1 (en) * | 1995-01-18 | 2002-08-20 | Immersion Corporation | Force feedback device including flexure member between actuator and user object |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5672044A (en) * | 1974-01-24 | 1997-09-30 | Lemelson; Jerome H. | Free-traveling manipulator with powered tools |
| JP2567198B2 (ja) | 1993-10-29 | 1996-12-25 | 株式会社明電舎 | マスタスレーブ形マニプレータ |
| US5792135A (en) * | 1996-05-20 | 1998-08-11 | Intuitive Surgical, Inc. | Articulated surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| JP3178813B2 (ja) | 1998-05-29 | 2001-06-25 | 川崎重工業株式会社 | 遠隔操縦装置 |
| JP4656700B2 (ja) * | 2000-07-11 | 2011-03-23 | オリンパス株式会社 | 内視鏡外科手術システム |
| US7831292B2 (en) * | 2002-03-06 | 2010-11-09 | Mako Surgical Corp. | Guidance system and method for surgical procedures with improved feedback |
| JP2003299674A (ja) * | 2002-04-12 | 2003-10-21 | Masasuke Shiraishi | 手術台装置 |
| JP3912251B2 (ja) * | 2002-10-02 | 2007-05-09 | 株式会社日立製作所 | マニピュレータ |
| JP2004223128A (ja) * | 2003-01-27 | 2004-08-12 | Hitachi Ltd | 医療行為支援装置および方法 |
| JP2005030451A (ja) * | 2003-07-08 | 2005-02-03 | Alps Electric Co Ltd | 力覚付与型入力装置 |
-
2005
- 2005-05-20 JP JP2005147786A patent/JP2006321027A/ja active Pending
-
2006
- 2006-05-17 US US11/434,900 patent/US7391177B2/en active Active
- 2006-05-19 EP EP06010411A patent/EP1724071A1/en not_active Withdrawn
- 2006-05-19 CN CNB2006100824562A patent/CN100522504C/zh not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5399951A (en) * | 1992-05-12 | 1995-03-21 | Universite Joseph Fourier | Robot for guiding movements and control method thereof |
| US6437771B1 (en) * | 1995-01-18 | 2002-08-20 | Immersion Corporation | Force feedback device including flexure member between actuator and user object |
| US6233504B1 (en) * | 1998-04-16 | 2001-05-15 | California Institute Of Technology | Tool actuation and force feedback on robot-assisted microsurgery system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006321027A (ja) | 2006-11-30 |
| US20060261770A1 (en) | 2006-11-23 |
| EP1724071A1 (en) | 2006-11-22 |
| CN1864938A (zh) | 2006-11-22 |
| US7391177B2 (en) | 2008-06-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100522504C (zh) | 主·从式机械手系统及其操作输入装置 | |
| US20230240775A1 (en) | Actuated grips for controller | |
| US20200330172A1 (en) | Methods, Systems, and Devices Relating to Force Control Surgical Systems | |
| US6233504B1 (en) | Tool actuation and force feedback on robot-assisted microsurgery system | |
| Tavakoli et al. | A force reflective master-slave system for minimally invasive surgery | |
| US20220015852A1 (en) | User interface device having grip linkages | |
| JP2002059380A (ja) | マスタースレーブ装置 | |
| JP2013034851A (ja) | マニピュレータシステム | |
| Hadavand et al. | A novel remote center of motion mechanism for the force‐reflective master robot of haptic tele‐surgery systems | |
| US11730556B2 (en) | Compact actuation configuration and expandable instrument receiver for robotically controlled surgical instruments | |
| WO2019039612A2 (ja) | 鉗子システム | |
| US20210251707A1 (en) | Control switch position sensing across a rotational joint | |
| Shim et al. | An all-joint-control master device for single-port laparoscopic surgery robots | |
| US20220104892A1 (en) | Actuation carriage with integrated measurement for robotically controlled surgical instruments | |
| JP4346615B2 (ja) | 医療用マニピュレータ | |
| EP3787852B1 (en) | User interface device having grip linkages | |
| Li et al. | Haptic device with gripping force feedback | |
| WO2021011924A1 (en) | Compact actuation configuration and expandable instrument receiver for robotically controlled surgical instruments | |
| Bleuler et al. | Trends in surgical robotics | |
| Gosselin | Modern devices for telesurgery | |
| Ishii et al. | Lyapunov function based bilateral control for teleoperation system with time varying delay | |
| Prasanga et al. | Achievement of real haptic sensation with tendon driven segregated jaws for laparoscopic forceps | |
| Agarwal et al. | Additive Manufacturing and Series Elastic Actuation for Hand Exoskeletons | |
| Zhang et al. | Application research of telesurgical robot control system with force feedback device | |
| MICROSURGERY | I11111 111111ll Ill11 Ill11 IIIII 11111 IIIII IIIII IIIII Ill11 11ll1111ll11l111 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20090805 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |