CN100335356C - 电动自行车 - Google Patents
电动自行车 Download PDFInfo
- Publication number
- CN100335356C CN100335356C CNB031239307A CN03123930A CN100335356C CN 100335356 C CN100335356 C CN 100335356C CN B031239307 A CNB031239307 A CN B031239307A CN 03123930 A CN03123930 A CN 03123930A CN 100335356 C CN100335356 C CN 100335356C
- Authority
- CN
- China
- Prior art keywords
- acceleration
- self
- mentioned
- drive motor
- power
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/45—Control or actuating devices therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/55—Rider propelled cycles with auxiliary electric motor power-driven at crank shafts parts
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Memory System Of A Hierarchy Structure (AREA)
- Vehicle Body Suspensions (AREA)
- Control Of Transmission Device (AREA)
Abstract
一种电动自行车,包含检测加速度的加速度检测单元(203)、根据被检测出的加速度控制自行进动力的急加速抑制控制部分(205)。另外,设置推车步行控制部分(211),它响应从自行进操作输入单元(节流杆)输入的自行进操作,使驱动电机(M)产生与步行速度对应的自行进动力。推车步行控制部分(211),在判断为节流杆产生的自行操作处于非骑乘状态时,使驱动电机(M)产生与步行速度对应的自行进动力。
Description
本发明是2001年2月28日递交的名称为“电动自行车”的第01110905.X号专利申请的分案申请。
技术领域
本发明涉及具备产生根据骑车人进行的自行进操作的操作量的自行走动力的驱动电机的电动自行车,特别涉及不管路面状况和载重量等的负荷变化如何,都可以得到最佳的加速度,与此同时,可以在骑车人推车步行时得到与步行速度对应的自行动力的电动自行车。
背景技术
在例如日本特开平9-263289号公报中提出了:和具备响应被输入到曲柄轴上的蹬踏力产生辅助动力的电动电机,合成辅助动力和蹬踏力将其传递到驱动轮的电动辅助自行车,所谓的助力自行车不同,具备响应骑车人的自行进操作的操作量产生自行进动力的驱动电机的电动自行车。如果采用上述的电动自行车,就可以与骑车人自身产生的蹬踏力无关,只用简单的操作得到与操作量对应的自行动力。
上述以往的电动自行车因为比以往的自行车重,所以在骑车人推车步行时也希望产生与步行速度相应的微弱的自行进输出。因此,在以往的正规的节流杆之外,为了以步行速度自行进而设置第2节流杆,如果操作第2节流杆则产生与步行速度相应的自行输出。
另外,为了判断骑车人是否推车步行,在座位乘座面等处设置检测骑车人是否坐在座位上的传感器和开关,只在非乘座状态下操作节流杆时,产生适应步行速度的自行进输出。
在上述的电动自行车中,因为只根据骑车人的自行进操作的操作量确定自行进动力,所以例如如果适宜平坦路面使操作量和自行动力对应,则在上坡时输出不足,在下坡时输出过剩得不到所希望的运转性能。另外,除了路面状况以外,例如在骑车人的体重和载货的重量等的总重量比基准值还大时变得输出不足,如果比基准值还小则变得输出过剩。
进而,在以往的助力自行车中,驱动电机的输出依赖于蹬踏力的大小,因为骑车人不能长时间持续发出大的蹬踏力,所以驱动电机不会长时间输出过负荷。与此相反在电动自行车中,因为根据骑车人进行的自行进操作的操作量产生自行进动力,所以要考虑长时间过负荷输出。
发明内容
本发明的第1个目的在于解决上述以往的问题,提供一种不管路面状况和载重量等的负荷如何变化,都可以得到最佳加速度的电动自行车。
本发明的第2目的在于解决上述以往的问题,提供一种不连续过度使用驱动电机,适宜地限制其输出的电动自行车。
进而,因为,在电动自行车中为了使其输出与步行速度对应的自行进动力,设置了和节流杆不同的用于以步行速度自行进的第2节流杆,或者另外设置落座传感器及其信号线等,所以存在不仅车重伴随零件数量的增加而进一步增加,而且引起制造工序复杂化和成本增加的技术问题。
本发明的第3个目的在于解决上述以往的技术问题,提供一种可以以简单的构成实现以步行速度的自行进功能的电动自行车。
为了实现上述的目的,本发明的特征在于采用了以下那样的手段。
(1)一种电动自行车,具备产生响应骑车人进行的自行进操作的操作量的自行动力的驱动电机,其特征在于:具备输出限制单元,把上述自行进动力限制在规定值,并且在驱动电机的温度在基准温度以上时,使目标占空比逐渐减小,其中上述输出限制单元把上述自行进驱动力限制在驱动电机的额定输出的2倍以内。
(2)在具备产生响应骑车人进行的自行进操作的操作量的自行进动力的驱动电机的电动自行车中,设置输出限制单元,把驱动电机的自行进动力限制在规定值。
如果采用上述的方案(1),因为根据自行进操作的操作量和加速度的对应关系控制自行进动力,所以不管路面状况和载重量等如何,都可以得到适应自行进操作的操作量的加速度。
如果采用上述的方案(2),因为根据自行进操作的操作量限制从驱动电机产生的自行进动力,所以可以防止驱动电机的过度使用于未然。
(3)在具备输入骑车人的自行进操作的自行进操作输入单元,以及产生响应上述自行进操作的操作量的自行进动力的驱动电机的电动自行车中,设置有推车步行控制单元,响应从自行进操作输入单元输入的自行操作,使上述驱动电机产生与步行速度对应的自行进动力。
如果采用上述的方案(3),因为可以用使驱动电机产生通常的自行进动力的自行进操作输入单元产生与步行速度对应的自行动力,所以不设置多个自行操作输入单元,就能够用简单的构造实现具有以步行速度行进的自行进功能的电动自行车。
附图说明
图1是展示适用了本发明的电动自行车的构成的图。
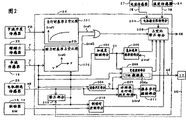
图2是图1的控制器的方框图。
图3是展示控制器的动作的流程图。
图4是急加速抑制控制的流程图。
图5是变速控制的流程图。
图6是电机输出限制控制的流程图。
图7是展示从2档到3档的加挡时的变速控制方法的图。
图8是展示从2档到1档的减挡时的变速控制方法的图。
图9是展示从1档到2档的加挡时的变速控制方法的图。
具体实施方式
以下,参照附图详细说明本发明。图1是展示适用了本发明的电动自行车的构成的图,对于本发明的说明不需要的构成,省略其图示。
在车把10上,和以往的自行车一样,在左端设置有后轮用的制动杆11,在右端上设置有前轮用的制动杆13,在各制动杆11、13的支点附近,设置有检测到各制动杆11、13处于操作状态并输出处于制动中的信号SB的制动开关12、14。进而,在车把10的右端上,设置有把作为指示在后述的驱动电机M中产生的自行进动力的自行进操作输入单元的节流杆16及作为操作量检测其操作角度θth的节流开度传感器15。
在车体车架的中央部分上,安装有动力单元2,可以选择由驱动电机M驱动的“自行行进”以及用驱动电机M的驱动力辅助蹬踏力的“助力行进”。从左右的曲柄踏板38L、38R输入到曲柄轴30的蹬踏力,经过单向超越离合器26被传递到与曲柄轴30同轴状连接的大直径齿轮36上,进而,经过第1空转轴35传递到输出轴34。
另一方面,驱动电机M产生的驱动力,经由第2空转轴36传递到空转齿轮37。空转齿轮37相对第1空转轴35经由单向超越离合器29连接,被传递到上述空转齿轮37上的驱动力,经过第1空转轴35传递到上述输出轴34。输出轴34的一端露出在动力单元2的外部,在该露出端上连接有驱动链轮32。
电机转动传感器25,检测驱动电机M的转动速度NM。温度传感器24检测驱动电机M的温度TM。蹬踏力传感器23检测被输入到曲柄轴30上的蹬踏力。曲柄踏板转动传感器22,检测曲柄轴30的转动速度NC。电流传感器27,检测出驱动电机M的驱动电流IM。各传感器的输出信号被输入到控制器20。
在作为驱动轮的后轮31的车轴上,设置有被动链轮33以及4级变速的变速箱19。上述输出轴34的驱动链轮32和被动链轮33由链条39联接。自动变速致动器17,响应从上述控制器20输出的变速指令SG,输出代表变速级的变速换挡信号DG。变速箱19由上述变速换挡信号DG变速。后轮31的转动速度V用车速传感器18检测出并取入到上述控制器20。
图2是展示上述控制器20的主要部分的构成的方框图,和上述相同的符号表示相同或者相当的部分。
在自行进时基准占空比图201中,把在自行行进时提供给驱动电机M的驱动电流IM的基准占空比Dref1,作为用上述节流开度传感器15检测出的节流开度θtth的函数预先登记。在助力时基准占空比图202中,把在助力行进时提供给驱动电机M的驱动电流IM的基准占空比Dref2,作为由上述蹬踏力传感器23检测出的蹬踏力F以及由上述车速传感器18检测的车速V的函数预先登记。
进而,不用车速传感器18求车速V,而可以如图2的虚线所示,另外设置车速检测部分213,根据从自动变速致动器17输出的代表变速级G的变速换挡信号DG和电机转速NM检测车速。
加速度检测部分203,根据车速V的时间变化率检测加速度ΔV。齿轮判定部分204,根据上述被检测出的车速V以及电机转速NM判定现在的齿轮级G。急加速抑制控制部分205,把上述检测出的加速度ΔV和基准加速度ΔVref比较,如果被检测出的加速度ΔV超过基准加速度ΔVref,则把用于抑制急加速的控制指示给后述的占空比修正部分208。
变速控制部分206,根据上述被检测出的加速度ΔV及车速,以及由上述齿轮判定部分204判断出的现在的齿轮级G,参照变速车速(Vch)数据表206a,判断现在的行进状态是否是变速定时。该判定结果,在被提供给上述占空比修正部分208的同时被输出到变速致动器17。
非骑乘自行进判定部分207,根据现在的齿轮级G以及电机转速NM,判断现在的自行进操作是否处于骑车人的非骑乘状态。推车步行控制部分211,在判断为自行进操作处于骑车人的非骑乘状态时,把用于产生与步行速度对应的自行动力的控制指示给占空比修正部分208。
制动时控制部分210,把与制动操作的有无以及车速V对应的自行动力的控制指示给占空比修正部分208。进而更具体地说,上述制动时控制部分210,当检测出在行进中的制动开关12、14的接通状态时,指示用于使驱动电机M产生从外部看该驱动电机M实际上变成无负荷的驱动力的控制。另外,当在制动开关12、14处于接通状态的停车状态中进行自行行走操作时,使驱动电机M产生响应该自行行进操作的操作量的驱动力。
电机输出限制部分209,根据由上述电流传感器27检测出的驱动电机M的驱动电流IM,以及由上述温度传感器24检测出的驱动电机M的温度TM监视该驱动电机M的使用状况,如果驱动电机处于过度使用状态时,则向占空比修正部分208指示进行限制自行动力用的控制。
上述占空比修正部分208,如后面详细叙述的那样,根据来自急加速抑制控制部分205、变速控制部分206、推车步行控制部分211、制动时控制部分210以及电机输出限制部分209的指示,修正用上述各占空比图201、202求得的基准占空比Dref1、Dref2,而后作为目标占空比DM输出。
以下,参照图3的流程图说明采用上述控制器20的自行行进时的驱动电机M的控制方法。
在步骤S11中,用上述节流开度传感器15检测节流杆16的开度θth,用车速传感器18检测车速V,进而,用电机转速传感器25检测驱动电机M的转速NM。在步骤S12中,根据在上述步骤S11中检测出的车速V,由上述加速度检测部分203计算加速度ΔV。在步骤S13中,根据上述车速V和电机转速NM的相关关系,由上述齿轮判定部分204判断现在的齿轮级G。再有,齿轮级G还可以根据从上述自动变速致动器17输出的变速换挡信号DG判断。
在步骤S14中,用上述电流传感器27检测出驱动电机M的驱动电流IM,用温度传感器24检测出驱动电机M的温度TM。在步骤S15中,参照上述自行进时占空比图201,根据在上述步骤S11中检测出的节流开度θth,检索自行进时基准占空比Dref1。
在步骤S16中,根据上述制动开关12、14的状态,由上述制动时控制部分210判断是否进行了制动操作。如果没有进行制动操作,则在步骤S17中,根据电机转速NM的上升率ΔNM,由上述非骑乘自行进判定部分207判断骑车人是否在非骑乘状态下操作了节流杆16。在此,如果电机转速NM的上升率ΔNM在基准上升率ΔNref以上时,判断为骑车人在非骑乘状态下操作了节流杆16并进入步骤S24,除此以外,判断为在骑乘状态下操作了节流杆16并进入步骤S18。
再有,用于判断节流杆16是否在骑车人的非骑乘状态下被操作的参数,并不限于上述的电机转速的上升率ΔNM,例如也可以把加速度ΔV作为判定参数使用,在加速度ΔV比基准加速度还大时,判断为在非骑乘状态下的操作。或者,也可以把驱动电机M的驱动电流的变化率作为判定参数使用,在电流变化率比基准变化率还大时,判断为在非骑乘状态下的操作。
这样,因为,在本实施方案中设置成根据车辆的加速度、驱动电机的转动速度的变化率,或者驱动电机的驱动电流的变化率,判断自行进操作是否在骑车人的非骑乘状态下进行,所以,不需要另外设置用于检测骑车人处于非骑乘状态的传感器和开关。
在以下的步骤S18中,执行在抑制急加速的同时可以得到充分的加速性能的“急加速抑制控制”。
图4是展示“急加速抑制控制”的控制内容的流程图,通过根据节流杆16的操作量和加速度的对应关系控制驱动电机M的自行动力,就可以不管路面状况和载重量等如何,都可以得到适合节流杆16的操作量的加速度。
在步骤S181中,在上述急加速抑制控制部分205中,把现在的加速度ΔV和基准加速度ΔVref比较。在此,如果加速度ΔV上升超过基准加速度ΔVref时,判断为急加速状态并进入步骤S182。在步骤S182中,用占空比修正部分208,对从上述自行进时占空比图201中检索出的基准占空比Dref1乘比“1”还小的修正系数,计算结果被作为目标占空比DM。
在本实施方案中,上述修正系数被定义为“0.9”的k1次幂,指数k1的初始值被设定为“1”。因而,最初从上述图201中判断出的基准占空比Dref1的0.9倍的值,就被作为目标占空比DM登记。在步骤S183中,上述指示k1的值只被增加“1”。在步骤S184中,设置急加速抑制中标志F1。
其后,因为在上述步骤S181中在判定为加速度ΔV下降到基准加速度ΔVref以下为止,反复进行上述的各处理指数k1的值增大,所以对应该指数k1的值目标占空比DM逐渐被减少。
另外,如上述那样目标占空比DM逐渐减少的结果,在上述步骤S181中,如果判断为加速度ΔV下降到基准加速度ΔVref以下时,在步骤S185中,在上述急加速抑制控制中参照标志F1。在此,如果被设置为标志F1,则为了使在步骤S182中逐渐减少的占空比逐渐增加进入步骤S186。
在步骤S186中,在现在的目标占空比DM上乘比“1”还小的修正系数,把计算结果设置成新的目标占空比DM。在本实施方案中,上述修正系数被定义为“0.9”的k2次幂,指数k2的初始值被设定为“5”。因而,最初目标占空比DM的0.59(=0.59)倍的值成为目标占空比DM。
在步骤S187中,判定上述指数k2是否减少到“0”,因为最初是“5”所以进入步骤S188,在此指数k2的值一次减少1个。另外,在上述步骤S187中,如果判断为上述指数k2为“0”,则在步骤S189中,在上述急加速抑制中复位标志F1并结束一连串的“急加速抑制控制”。
这样,在本实施方案中如果加速度ΔV上升超过基准加速度ΔVref,则在步骤S182中修正系数逐渐被减少目标占空比DM逐渐被减少,其后,当加速度ΔV低于基准加速度ΔVref时,在步骤S186中修正系数逐渐被增加目标占空比DM逐渐被增加,因为上述逐渐减少部分被弥补,所以可以在抑制急加速的同时得到充分的加速性能,
返回图3,在步骤S19中,由上述变速控制部分206判断是否处于自动变速定时,当预先存储在上述变速车速数据表206a中的每级齿轮的变速车速Vch和现在的车速V的差的绝对值下降到基准速度VA以下时,为了执行自动变速而执行步骤S20的“变速控制”。作为上述变速车速Vch,分别登记表示1档/2档间的变速定时的变速车速Vch12、表示2档/3档间的变速定时的变速车速Vch23,以及表示3档/4档间的变化定时的变速车速Vch34,根据现在的齿轮级G选择某一变速车速Vch。
图5是展示上述“变速控制”的内容的流程图,主要展示上述变速控制部分206的动作。
在步骤S201中,判定由于换挡产生的转矩变动是上升还是下降。在此,例如从2档向3档加挡时,如图7所示,因为在变速车速Vch23中的3档的转矩比2档的转矩还大,所以被判断为在换挡后转矩上升并进入步骤S202。同样,从2档向1档减挡时,如图8所述,也是因为在变速车速Vch12中的1档的转矩比2档的转矩还大,所以被判断为在换挡后转矩上升并进入步骤S202。
在步骤S202中,参照上述变速控制部分206的变速车速数据表206a,判断现在的车速V是否达到了与现在的齿轮级对应的预定的变速车速Vch23。在此,如图7所示,当在以2档行进中车速V达到变速车速Vch被判断为向3档加挡定时时,在步骤S203中驱动变速致动器17进行换挡(加挡)。在步骤S204中,在现在的目标占空比DM上乘比“1”还小的修正系数,把计算结果设置为新的目标占空比DM。
在本实施方案中,上述修正系数被定义为“0.9的k3次幂,指数k3的初始值被设定在“5”。因而,最初现在的目标占空比DM的0.59(=0.59)倍的值成为目标占空比DM。其结果,如图7所示,因为加挡到3档后的转矩,尽管齿轮级是3档但由于降低为和在2档中的转矩相同的转矩,所以可以得到良好的换挡感觉。
在步骤S205中,判断完上述指数k3是否是“0”,因为最初是“5”所以进入步骤S207。在步骤S207中,指数k3只以“1”减少。
其后,反复上述的各处理,指数k3的值逐渐减少,与此对应目标占空比DM逐渐被增加。因而,如图7所示,因为驱动电机M的自行动力也是在变速车速Vch23中在一下子减少后逐渐增加,最终返回到原本的目标占空比DM,所以得到适应齿轮级的原本的转矩。
同样,如图8所示,在2档行进中在车速V降低到变速车速Vch12后减挡到1档,在减挡后,尽管齿轮是1档但在达到和在2档的转矩同等的转矩为止目标占空比DM被减少,其后,因为目标占空比DM逐渐增加返回到原本的目标占空比,所以可以防止变速冲击的发生。
另一方面,例如在从1档向2档加挡时,如图9所示,因为在变速车速Vch12中的2档的转矩比1档的转矩还小,所以判断为在换挡后转矩减少并进入步骤S208。在步骤S208中,判断现在的车速V是否已达到预定的变速车速Vch12。如果判定为车速还未达到变速车速Vch12,则在步骤S209中,在现在的目标占空比DM上乘比“1”还小的修正系数,把计算结果设定为新的目标占空比DM。
在本实施方案中,上述修正系数被定义为“0.9”的k4次幂,指数k4的初始值被设定为“1”。因而,最初现在的目标占空比DM的0.9倍的值成为目标占空比DM。在步骤S210中,上述指数k4每次增加“1”。
其后,因为在上述步骤S208中在判断为车速V已达到变速车速Vch12之前反复上述的各处理,所以根据上述指数k4的值逐渐减少目标占空比DM。因而,如图9所示,转矩逐渐减少。
其后,在步骤S208中,如果判定为车速V已达到了变速车速Vch12,则在步骤S211中,驱动变速致动器进行换挡。这时,如果采用本实施方案,则如图9所示因为转矩下降为和2档中的转矩同等转矩,所以可以防止由此换挡产生的变速冲击。在步骤S212中,把上述指数k4设置“1”并结束一连串的变速控制。
返回图3,在步骤S23中,执行用于防止电机的过度使用的“电机输出限制控制”。以下,参照图6的流程图说明上述有关“电机输出限制控制”。
在步骤S231中,根据用上述电流传感器27检测出的电机驱动电流IM和现在的目标占空比DM,计算出驱动电机M现在的输出Pout。在步骤S232中,比较驱动电机M现在的输出Pout和规定的最大输出Pmax。最好把上述最大输出Pmax设定为驱动电机M的最大额定输出的2倍左右,在本实施方案中设定为最大额定的1.5倍。
在此,如果判定为现在的输出Pout上升超过最大输出Pmax,则在步骤S233中,把目标占空比DM设置为规定的最大值Dmax。在步骤S234中,比较由上述温度传感器24检测出的驱动电机M的温度TM和基准温度Tref。在本实施方案中,基准温度Tref被设定为90℃。
在此,如果温度TM在基准温度Tref以上,则在步骤S235中,在现在的目标占空比DM上乘比“1”还小的修正系数,把计算结果设置为新的目标占空比DM。在本实施方案中,把上述修正系数定义为“0.5”的k5次幂,指数k5的初始值被设定为“1”。因而,最初现在的目标占空比DM的0.5倍的值成为目标占空比DM。在步骤S236中,上述指数k5只以“1”增加。
另一方面,在上述步骤S234中,如果判断为温度TM下降到基准温度Tref以下,则在步骤S236中,把上述指数k5设置为初始值“1”。
这样,因为在本实施方案中在限制驱动电机M的输出的同时,如果温度上升就减少目标占空比,所以可以防止驱动电机M的过度使用于未然。另外,因为把驱动电机M的输出上限限制在该驱动电机M的额定输出的2倍以内,所以可以在不过度使用驱动电机M下得到大的自行动力。
再次返回图3,在步骤S25中,基于如上述那样求得的目标占空比DM执行驱动电机M的电流控制。
进而,在步骤S16中,如果判定为某一制动开关12、14处于接通状态,即处于制动操作状态中,则在步骤S21中,根据车速V判断是否在行进中。
在此,如果车速V比“0”还大,则判定为在行进中并进入步骤S22。在步骤S22中,作为用于使该驱动电机M产生从外部看驱动电机M实际上为无负荷的驱动力的目标占空比DM,例如,设定为相当于现在的目标占空比的20%的值,或者相当于目标占空比的最大值Dmax的20%的值(或者,也可以是“0”%)。
另外,如果在上述步骤S21中判定为处于停车状态,则进入上述图4说明的“急加速抑制控制”的步骤S186。其结果,目标占空比DM一下子减少,其后逐渐增加。
即,在本实施方案中如果在执行了制动操作的停车状态中进行自行进操作,则因为使驱动电机产生的自行动力逐渐增加到响应了自行进操作的操作量的值前,所以可以防止在坡道起步时车辆的溜车。
进而,在上述步骤S17中,如果判定为骑车人处于非骑乘状态,则在步骤S24中,为了产生最适合推车行走的自行动力,把相当于现在的目标占空比DM的20%,或者相当于目标占空比的最大值Dmax的20%的值设定为新的目标占空比DM。
这样,如果采用本实施方案,因为可以使用用于产生通常的自行动力的自行进操作输入单元(节流杆16)产生对应步行速度的自行动力,所以不设置多个自行操作输入单元,就可以构成具有以步行速度自行进的自行功能的电动自行车。
另外,在本实施方案中,因为设置成,判断自行进操作是否是骑车人处于非骑乘状态,只在判定为自行进操作是处于非骑乘状态的情况下,产生与步行速度对应的自行动力,所以,不会发生骑车人已骑到车上却仍输出与步行速度对应的自行动力的情况。
如果采用本发明,则可以实现以下的效果。
(1)因为设置成可以根据自行进操作的操作量和加速度的对应关系控制自行进动力,所以不管路面状况和载重量如何,都可以得到响应自行进操作的操作量的加速度。
(2)因为如果加速度超过规定的基准加速度,则使提供给驱动电机的自行进动力从响应了自行进操作的操作量的基准值开始逐渐减少,所以在如下坡和载重量小的情况那样,在加速容易的环境下可以得到减少自行进动力的适宜的加速感。其后,如果被检测出的加速度下降到基准加速度以下,因为提供给驱动电机的自行进动力至响应了自行进操作的操作量的基准值为止逐渐增加,所以在容易加速的环境消失后仍可以得到良好的加速感。
(3)因为设置把驱动电机的自行进动力限制在规定值的输出限制单元,限制根据自行进操作的操作量从驱动电机产生的自行进动力,所以可以防止驱动电机的过度使用于未然。
(4)因为设置成把驱动电机的自行进动力限制在该驱动电机的额定输出的2倍以内,所以可以不过度使用驱动电机而得到充分的自行进动力。
(5)因为设置成使用使驱动电机产生通常的自行进动力的自行进操作输入单元产生与步行速度对应的自行动力,所以不设置多个自行操作输入单元,就可以以简单的构成实现具有以步行速度行进的自行进功能的电动自行车。
(6)因为设置成判断自行操作是否是在骑车人的非骑乘状态作出的,只在判断为自行操作处于非骑乘状态时,使驱动电机产生与步行速度对应的自行动力,所以不会出现骑车人已骑上车但仍输出与步行速度对应的自行动力的现象。
(7)因为设置成根据车辆的加速度、驱动电机的转动速度的变化率,或者驱动电机的驱动电流的变化,判断自行进操作是否是在骑车人的非骑乘状态下进行的,所以不需要另外设置检测骑车人在非骑乘状态的传感器和开关。
Claims (1)
1.一种电动自行车,具备产生响应骑车人进行的自行进操作的操作量的自行动力的驱动电机,其特征在于:
具备输出限制单元,把上述自行进动力限制在规定值,并且在驱动电机的温度在基准温度以上时,使目标占空比逐渐减小,其中
上述输出限制单元把上述自行进驱动力限制在驱动电机的额定输出的2倍以内。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP055083/2000 | 2000-03-01 | ||
| JP2000055083A JP4458388B2 (ja) | 2000-03-01 | 2000-03-01 | 電動自転車 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB01110905XA Division CN1154598C (zh) | 2000-03-01 | 2001-02-28 | 电动自行车 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1515453A CN1515453A (zh) | 2004-07-28 |
| CN100335356C true CN100335356C (zh) | 2007-09-05 |
Family
ID=18576261
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB031239293A Expired - Fee Related CN100335355C (zh) | 2000-03-01 | 2001-02-28 | 电动自行车 |
| CNB01110905XA Expired - Fee Related CN1154598C (zh) | 2000-03-01 | 2001-02-28 | 电动自行车 |
| CNB031239307A Expired - Fee Related CN100335356C (zh) | 2000-03-01 | 2001-02-28 | 电动自行车 |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB031239293A Expired - Fee Related CN100335355C (zh) | 2000-03-01 | 2001-02-28 | 电动自行车 |
| CNB01110905XA Expired - Fee Related CN1154598C (zh) | 2000-03-01 | 2001-02-28 | 电动自行车 |
Country Status (7)
| Country | Link |
|---|---|
| EP (1) | EP1129934B1 (zh) |
| JP (1) | JP4458388B2 (zh) |
| CN (3) | CN100335355C (zh) |
| AT (1) | ATE309940T1 (zh) |
| DE (1) | DE60114904T8 (zh) |
| ES (1) | ES2252098T3 (zh) |
| TW (1) | TW503199B (zh) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003231491A (ja) * | 2002-02-08 | 2003-08-19 | Sunstar Eng Inc | 有酸素運動を可能とする電動アシスト自転車 |
| JP4350531B2 (ja) * | 2004-01-08 | 2009-10-21 | 本田技研工業株式会社 | 電動車両 |
| EP1953079A1 (en) * | 2007-01-31 | 2008-08-06 | Tecnocarbur S.r.L. | Propulsion device for manually driving electric bicycles with assisted pedal stroke |
| CN101640514B (zh) * | 2008-09-17 | 2013-03-20 | 天津市松正电动汽车技术股份有限公司 | 他励电机控制器及其控制方法 |
| DE102010003050A1 (de) * | 2010-03-19 | 2011-09-22 | Robert Bosch Gmbh | Fahrrad |
| US20120145469A1 (en) * | 2010-12-14 | 2012-06-14 | Gabriel Yui Lung Tong | Wheeled device with lever pedal mechanism |
| CN102275609B (zh) * | 2011-06-27 | 2013-12-11 | 哈尔滨工业大学深圳研究生院 | 婴儿车自动保护装置及方法 |
| JP5689849B2 (ja) * | 2012-05-18 | 2015-03-25 | マイクロスペース株式会社 | モータ駆動制御装置 |
| US20120253554A1 (en) * | 2012-06-16 | 2012-10-04 | Stanton Mark Hamilton | RC Car Anti-Flip System and Methods |
| CN104972928B (zh) * | 2014-04-05 | 2018-05-08 | 彭国智 | 带推车速度档的档位开关、控制器、语音提示器及电动车 |
| JP5986150B2 (ja) * | 2014-07-17 | 2016-09-06 | 株式会社シマノ | 自転車用制御装置、自転車用制御装置を備える電動アシスト自転車、及び電動アシスト自転車のモータ制御方法 |
| DE102014217758A1 (de) * | 2014-09-05 | 2016-03-10 | Bayerische Motoren Werke Aktiengesellschaft | Antriebshilfe sowie Verfahren zum Bereitstellen eines unterstützenden Drehmoments |
| DE102014219595A1 (de) * | 2014-09-26 | 2016-03-31 | Continental Teves Ag & Co. Ohg | Längsdynamiksteuerung am Pedelec |
| CN105480116A (zh) * | 2015-12-25 | 2016-04-13 | 上海蓥光电子科技有限公司 | 一种电机控制方法及系统、电动车 |
| DE102016218374B3 (de) * | 2016-09-23 | 2018-02-22 | Robert Bosch Gmbh | Steuerungsverfahren und Vorrichtungen zur Schiebehilfe für ein Elektrofahrrad |
| JP6927689B2 (ja) * | 2016-10-31 | 2021-09-01 | 株式会社シマノ | 自転車用制御装置およびこれを含む自転車用制御システム |
| GB2557287A (en) * | 2016-12-05 | 2018-06-20 | Wen Sung Lee | Control device for an electric bicycle |
| CN106697159A (zh) * | 2016-12-30 | 2017-05-24 | 周晓菲 | 便携式电动车的身体姿态驶停控制方法 |
| US20200101961A1 (en) * | 2018-10-02 | 2020-04-02 | GM Global Technology Operations LLC | System and method for inhibiting harsh engagement of a one-way clutch in a vehicle |
| US11738826B2 (en) | 2019-02-15 | 2023-08-29 | Sram, Llc | Bicycle control system |
| US11530015B2 (en) | 2019-02-15 | 2022-12-20 | Sram, Llc | Bicycle control system |
| US11518472B2 (en) | 2019-02-15 | 2022-12-06 | Sram, Llc | Bicycle control system |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0222179A1 (de) * | 1985-10-24 | 1987-05-20 | Wilhelm Dr. Dipl.-Ing. Binder | Fahrrad mit zuschaltbarem Motorantrieb |
| CN1214313A (zh) * | 1997-10-01 | 1999-04-21 | 本田技研工业株式会社 | 电动辅助自行车 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE69233024T2 (de) * | 1991-06-04 | 2003-10-16 | Yamaha Hatsudoki K.K., Iwata | Muskelgetriebenes Fahrzeug |
| JPH0899683A (ja) * | 1994-09-30 | 1996-04-16 | Suzuki Motor Corp | 動力自転車の補助動力制御方法およびその装置 |
| JPH08258782A (ja) * | 1995-03-27 | 1996-10-08 | Sanyo Electric Co Ltd | 電動自転車 |
| JP3528996B2 (ja) * | 1995-04-17 | 2004-05-24 | 本田技研工業株式会社 | 電動補助自転車 |
| JPH09219908A (ja) * | 1996-02-13 | 1997-08-19 | Yamaha Motor Co Ltd | 電動車両のモータ制御装置 |
| JPH09263290A (ja) * | 1996-03-27 | 1997-10-07 | Seiko Epson Corp | 電動自転車 |
| JP3642442B2 (ja) | 1996-03-29 | 2005-04-27 | ヤマハ発動機株式会社 | ペダル付電動車両 |
| JP3682590B2 (ja) * | 1996-05-24 | 2005-08-10 | ソニー株式会社 | 移動装置と移動制御方法 |
| TW387848B (en) * | 1997-12-24 | 2000-04-21 | Matsushita Electric Ind Co Ltd | Vehicle with power assist unit and its controlling |
| JP3054399B2 (ja) * | 1998-06-04 | 2000-06-19 | ヤマハ発動機株式会社 | 電動モータ付き自転車 |
-
2000
- 2000-03-01 JP JP2000055083A patent/JP4458388B2/ja not_active Expired - Lifetime
-
2001
- 2001-02-14 EP EP01103473A patent/EP1129934B1/en not_active Expired - Lifetime
- 2001-02-14 ES ES01103473T patent/ES2252098T3/es not_active Expired - Lifetime
- 2001-02-14 DE DE60114904T patent/DE60114904T8/de not_active Expired - Fee Related
- 2001-02-14 AT AT01103473T patent/ATE309940T1/de not_active IP Right Cessation
- 2001-02-26 TW TW090104300A patent/TW503199B/zh not_active IP Right Cessation
- 2001-02-28 CN CNB031239293A patent/CN100335355C/zh not_active Expired - Fee Related
- 2001-02-28 CN CNB01110905XA patent/CN1154598C/zh not_active Expired - Fee Related
- 2001-02-28 CN CNB031239307A patent/CN100335356C/zh not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0222179A1 (de) * | 1985-10-24 | 1987-05-20 | Wilhelm Dr. Dipl.-Ing. Binder | Fahrrad mit zuschaltbarem Motorantrieb |
| CN1214313A (zh) * | 1997-10-01 | 1999-04-21 | 本田技研工业株式会社 | 电动辅助自行车 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1129934A3 (en) | 2004-05-19 |
| DE60114904T2 (de) | 2006-05-24 |
| TW503199B (en) | 2002-09-21 |
| CN100335355C (zh) | 2007-09-05 |
| EP1129934A2 (en) | 2001-09-05 |
| JP4458388B2 (ja) | 2010-04-28 |
| ES2252098T3 (es) | 2006-05-16 |
| EP1129934B1 (en) | 2005-11-16 |
| CN1154598C (zh) | 2004-06-23 |
| ATE309940T1 (de) | 2005-12-15 |
| CN1515452A (zh) | 2004-07-28 |
| DE60114904T8 (de) | 2006-12-14 |
| CN1515453A (zh) | 2004-07-28 |
| CN1311130A (zh) | 2001-09-05 |
| DE60114904D1 (de) | 2005-12-22 |
| JP2001239981A (ja) | 2001-09-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100335356C (zh) | 电动自行车 | |
| CN1241783C (zh) | 电动自行车 | |
| CN1154597C (zh) | 电动自行车 | |
| CN1071658C (zh) | 用于电力助动车的助动力控制装置 | |
| CN1078555C (zh) | 带辅助动力的自行车的电力回收控制装置 | |
| CN1083371C (zh) | 电动辅助自行车 | |
| CN1283939C (zh) | 自行车用变速控制装置 | |
| JP5842105B2 (ja) | 電動アシスト自転車 | |
| CN1923557A (zh) | 用于车辆的巡航控制装置和方法 | |
| CN1111486C (zh) | 电动辅助自行车中的辅助动力控制装置 | |
| CN1629006A (zh) | 车辆驱动控制装置 | |
| CN1680160A (zh) | 转向系统 | |
| US20240300615A1 (en) | Method for Controlling an Electric Drive Motor of an Electrically Drivable Bicycle | |
| CN1636784A (zh) | 用于装有变速箱的混合型车辆的控制设备 | |
| CN1721218A (zh) | 用于车辆的驱动控制装置和方法 | |
| CN101041354A (zh) | 汽车的控制装置以及汽车 | |
| CN108725682B (zh) | 助力车的动力控制系统 | |
| JP2023053243A (ja) | 制御装置および変速システム | |
| JP4509282B2 (ja) | 電動自転車 | |
| JP4514072B2 (ja) | 電動自転車 | |
| CN1772531A (zh) | 动力输出装置及其控制方法和汽车 | |
| CN1773217A (zh) | 滑动判定装置和滑动判定方法以及车辆 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20070905 |