BR112014000991B1 - Dispositivo de conversão de energia elétrica - Google Patents
Dispositivo de conversão de energia elétrica Download PDFInfo
- Publication number
- BR112014000991B1 BR112014000991B1 BR112014000991-0A BR112014000991A BR112014000991B1 BR 112014000991 B1 BR112014000991 B1 BR 112014000991B1 BR 112014000991 A BR112014000991 A BR 112014000991A BR 112014000991 B1 BR112014000991 B1 BR 112014000991B1
- Authority
- BR
- Brazil
- Prior art keywords
- switching
- switching elements
- time
- ssp
- stp
- Prior art date
Links
Images











Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M5/00—Conversion of ac power input into ac power output, e.g. for change of voltage, for change of frequency, for change of number of phases
- H02M5/40—Conversion of ac power input into ac power output, e.g. for change of voltage, for change of frequency, for change of number of phases with intermediate conversion into dc
- H02M5/42—Conversion of ac power input into ac power output, e.g. for change of voltage, for change of frequency, for change of number of phases with intermediate conversion into dc by static converters
- H02M5/44—Conversion of ac power input into ac power output, e.g. for change of voltage, for change of frequency, for change of number of phases with intermediate conversion into dc by static converters using discharge tubes or semiconductor devices to convert the intermediate dc into ac
- H02M5/453—Conversion of ac power input into ac power output, e.g. for change of voltage, for change of frequency, for change of number of phases with intermediate conversion into dc by static converters using discharge tubes or semiconductor devices to convert the intermediate dc into ac using devices of a triode or transistor type requiring continuous application of a control signal
- H02M5/458—Conversion of ac power input into ac power output, e.g. for change of voltage, for change of frequency, for change of number of phases with intermediate conversion into dc by static converters using discharge tubes or semiconductor devices to convert the intermediate dc into ac using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M5/00—Conversion of ac power input into ac power output, e.g. for change of voltage, for change of frequency, for change of number of phases
- H02M5/02—Conversion of ac power input into ac power output, e.g. for change of voltage, for change of frequency, for change of number of phases without intermediate conversion into dc
- H02M5/04—Conversion of ac power input into ac power output, e.g. for change of voltage, for change of frequency, for change of number of phases without intermediate conversion into dc by static converters
- H02M5/22—Conversion of ac power input into ac power output, e.g. for change of voltage, for change of frequency, for change of number of phases without intermediate conversion into dc by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M5/275—Conversion of ac power input into ac power output, e.g. for change of voltage, for change of frequency, for change of number of phases without intermediate conversion into dc by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal
- H02M5/293—Conversion of ac power input into ac power output, e.g. for change of voltage, for change of frequency, for change of number of phases without intermediate conversion into dc by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of ac power input into dc power output; Conversion of dc power input into ac power output
- H02M7/02—Conversion of ac power input into dc power output without possibility of reversal
- H02M7/04—Conversion of ac power input into dc power output without possibility of reversal by static converters
- H02M7/12—Conversion of ac power input into dc power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M7/21—Conversion of ac power input into dc power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal
- H02M7/217—Conversion of ac power input into dc power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only
Abstract
dispositivo de conversão de energia trata-se de um dispositivo de conversão de energia elétrica que compreende um circuito de conversão tendo vários pares bidirecionalmente comutáveis de elementos de comutação conectados às respectivas fases e converte uma energia ac inserida em uma energia elétrica ac. um primeiro tempo de comutação é calculado durante o qual um dos elementos de comutação de um circuito de braço superior dos vários pares de elementos de comutação incluídos em uma fase dentre as respectivas fases é ligado, os outros elementos de comutação do circuito de braço superior dos vários pares de elementos de comutação incluídos nas outras fases são desligados, pelo menos um elemento de comutação de um circuito de braço inferior dos vários pares de elementos de comutação incluídos nas outras fases é ligado, e os outros elementos de comutação do circuito de braço inferior dos vários pares de elementos de comutação incluídos em uma fase são desligados usando as tensões detectadas pelo meio de detecção de tensão e um valor de comando de saída. um segundo tempo de comutação é calculado durante o qual os vários pares de elementos de comutação incluídos em uma fase dentre as respectivas fases são ligados e os vários pares de elementos de comutação incluídos nas outras fases dentre as respectivas fases são desligados. em um caso onde um estado é transitado a partir do primeiro tempo de comutação ao segundo tempo de comutação, dentre os elementos de comutação que se encontram em um estado ligado, um dos elementos de comutação de um entre o circuito de braço superior ou o circuito de braço inferior é desligado e o outro dos elementos de comutação do outro circuito de braço é mantido em um estado ligado.
Description
[001] A presente invenção refere-se a um dispositivo de conversão de energia elétrica.
[002] Conhece-se um aparelho de controle que serve para controlar um conversor de energia elétrica que compreende: um retificador PWM que realiza uma conversão de uma corrente alternada em uma corrente direta; e um inversor conectado ao retificador PWM para realizar uma inversão da corrente direta à corrente alternada, sendo que o aparelho de controle inclui: um meio de modulação bifásica para gerar um comando de tensão de saída para realizar uma modulação bifásica para o inversor; um primeiro meio de cálculo da quantidade de compensação para calcular uma quantidade de compensação que corrige o comando de tensão de saída a fim de compensar um erro de tensão de saída gerado quando a modulação bifásica para o inversor for realizada; um meio de geração de padrão de inversor PWM para gerar pulsos PWM aos elementos de comutação semicondutores do retificador PWM com base em um comando de corrente de entrada; um meio de detecção de comutação para detectar uma presença ou ausência de uma comutação do retificador PWM; um meio de detecção de magnitude de tensão para detectar uma tensão de uma fase máxima, uma tensão de uma fase intermediária, e uma tensão de uma fase mínima a partir de uma tensão de entrada de cada fase; e um meio de determinação de polaridade para determinar uma polaridade de uma corren-te de carga, em que o primeiro meio de cálculo da quantidade de compensação calcula a quantidade de compensação que corrige o comando de tensão de saída utilizando-se uma saída do meio de detecção de magnitude de tensão, uma saída do meio de determinação de polaridade, uma saída do meio de detecção de comutação, uma frequência de comutação do inversor, e um tempo morto.
[003] No entanto, ocorre um problema no qual o aparelho de controle conhecido para o dispositivo de conversão de energia elétrica compensa somente um erro de tensão gerado de acordo com uma comutação, mas não pode evitar a própria falha de comutação.
[004] Documento de Patente 1: Primeira Publicação de Pedido de Patente Japonesa (tokkai) No.2006-20384.
[005] Um objetivo da presente invenção consiste em proporcionar um dispositivo de conversão de energia elétrica que possa evitar a falha de comutação.
[006] O objetivo descrito anteriormente pode ser alcançado pela presente invenção de modo que, em um caso onde um estado é transitado a partir de um primeiro tempo de comutação até um segundo tempo de comutação, dentre os elementos de comutação, sendo que cada um desses se encontra em um estado ligado, um dos elementos de comutação de qualquer um entre um circuito de braço superior ou um circuito de braço inferior seja desligado e o estado ligado do outro entre os elementos de comutação em estado ligado do outro circuito de braço seja mantido.
[007] De acordo com a presente invenção, em um caso onde o estado é transitado a partir de um primeiro tempo de comutação até um segundo tempo de comutação, um dos elementos de comutação que estava no estado ligado é comutado e o estado do outro entre os elementos de comutação é fixado. Portanto, o número de vezes em que se realiza uma comutação é reduzido e pode-se evita que ocorra uma falha de comutação.
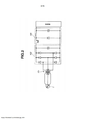
[008] A Figura 1 é um diagrama de blocos de um sistema de carrega- mento incluindo um dispositivo de conversão de energia elétrica em uma modalidade preferencial de acordo com a presente invenção.
[009] A Figura 2 é um diagrama de blocos de um sistema de carregamento em um primeiro exemplo comparativo.
[010] A Figura 3 é um diagrama de blocos de um sistema de carregamento em um segundo exemplo comparativo.
[011] A Figura 4 é um diagrama de blocos de um controlador que controla o dispositivo de conversão de energia elétrica mostrado na Figura 1.
[012] A Figura 5 é um gráfico que representa uma sequência de comutação de um elemento de comutação de fase r mostrado na Figura 1.
[013] A Figura 6 é um diagrama que representa uma relação entre um vetor de base e um vetor de tensão em uma seção de modulação de vetor espacial mostrada na Figura 4.
[014] A Figura 7(a) é um diagrama que é uma adição de um padrão de comutação a um diagrama vetorial da Figura 6 e a Figura 7(b) é um diagrama de circuito de uma fonte de alimentação de corrente alternada 1 e um conversor de matriz 4 no sistema de carregamento mostrado na Figura 1.
[015] A Figura 8 é um diagrama conceitual da tabela de padrão de comutação da Figura 4.
[016] As Figuras 9 (1) a (6) são diagramas para exemplificar as transições de estado dos elementos de comutação na Figura 1.
[017] A Figura 10 é um gráfico que representa uma relação entre um portador e um tempo de saída no controlador na Figura 4.
[018] A Figura 11 é um gráfico que representa uma forma de onda de tensão de saída de um conversor de matriz na Figura 1.
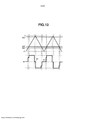
[019] A Figura 12 é um gráfico que representa outra forma de onda de tensão de saída do conversor de matriz na Figura 1.
[020] A Figura 13 é um gráfico que representa uma relação entre o portador e um valor de comando e uma forma de onda de tensão de saída em um aparelho inversor em um terceiro exemplo comparativo.
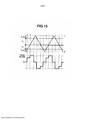
[021] A Figura 14 é um gráfico que representa uma relação entre o portador e o tempo de saída e uma forma de onda de tensão de saída, em um controlador mostrado na Figura 4.
[022] A Figura 15 é um gráfico que representa uma relação entre o portador e o tempo de saída e uma forma de onda de tensão de saída no dispositivo de conversão de energia elétrica em uma modificação da modalidade preferencial de acordo com a presente invenção.
[023] Nas partes que se seguem do presente documento, descreve-se uma modalidade preferencial de acordo com a presente invenção com relação aos desenhos.
[024] A Figura 1 é um diagrama de blocos de um sistema de bateria que inclui um dispositivo de conversão de energia elétrica relacionado a uma modalidade preferencial de acordo com a presente invenção.
[025] Nas partes que se seguem do presente documento, explica-se um caso no qual o dispositivo de conversão de energia elétrica nesta modalidade é aplicado a um sistema de carregamento como um exemplo, porém, esta modalidade pode ser aplicada a um veículo, ou similar, incluindo um motor e um aparelho de controle que controla o motor, ou similar.
[026] O sistema de carregamento nesta modalidade inclui: uma fonte de alimentação de corrente alternada 1; um filtro de entrada 2; sensores de tensão 31 ~ 33; um conversor de matriz 4; um circuito de transformador de alta frequência 5; um filtro de saída 6; e uma bateria 7.
[027] A fonte de alimentação de corrente alternada 1 é uma fonte de alimentação de corrente alternada trifásica e proporciona uma fonte de energia elétrica ao sistema de carregamento. O filtro de entrada 2 é um filtro para retificar uma energia elétrica de corrente alternada inserida a partir da fonte de alimentação de corrente alternada 1 e é constituído por circuitos LC tendo bobinas 21, 22, 23 e capacitores 24, 25, 26. As bobinas 21, 22, 23 são conectadas entre as respectivas fases da fonte de alimentação de corrente alternada 1 e de um conversor de matriz 4. Os capacitores 24, 25, 26 são conectados entre as bobinas 21, 22, 23 e são conectados entre as respectivas fases.
[028] Os sensores de tensão 31, 32, 33 são conectados entre a fonte de alimentação de corrente alternada 1 e o conversor de matriz 4 para detectar uma tensão de entrada (Vr, Vs, Vt) de cada fase a partir da fonte de alimentação de corrente alternada 1 ao conversor de matriz 4 e emite as tensões detectadas a um controlador 10 conforme será descrito mais adiante. O sensor de tensão 31 é conectado a um ponto intermediário de uma fase r do conversor de matriz 4, o sensor de tensão 32 é conectado a um ponto intermediário de uma fase s do conversor de matriz 4, e o sensor de tensão 33 é conectado a um ponto intermediário de uma fase t do conversor de matriz 4.
[029] O conversor de matriz 4 é dotado de uma pluralidade de elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn bidirecionalmente comutáveis, converte a energia elétrica de corrente alternada inserida a partir do suprimento de energia elétrica de corrente alternada 1 em uma energia elétrica de corrente alternada de alta frequência, e emite a energia elétrica de corrente alternada de alta frequência ao circuito de transformador de alta frequência 5. O conversor de matriz 4 é conectado entre o filtro de entrada 2 e o circuito de transformador de alta frequência 5. O elemento de comutação Srp, a fim de proporcionar o elemento bidirecionalmente comutável, inclui: um transistor Trrp1, como um MOSFET ou IGBT; um transistor Trrp2, como MOSFET ou IGBT; um diodo DrP1; e um diodo DrP2. O transistor Trrp1 e o transistor Trrp2 são serialmente conectados entre si em direções mutuamente opostas e o diodo DrP1 e o diodo Drp2 são serialmente conectados entre si em direções mutuamente opostas, o transistor Trp1 e o diodo Drp1 são conectados em paralelo entre si em direções mutuamente opostas, o transistor Trrp2 e o diodo Drp2 são conectados em paralelo entre si em direções mutuamente opostas. De modo similar, outros elementos de comutação Srn, Ssp, Ssn, Stp, Stn são constituídos por um circuito de ponte de transistores Trrn1, Trrn2 e diodos Drn1, Drn2, um circuito de ponte de transistores Trsp1, Trsp2 e diodos Dsp1, Dsp2, um circuito de ponte de transistores Trsn1, Trsn2 e diodos Dsn1, Dsn2, um circuito de ponte de transistores Trtp1, Trtp2 e diodos Dtp1, Dtp2, e um circuito de ponte de transistores Trtn1, Trtn2 e diodos Dtn1, Dtn2.
[030] Isto é, três de um par de circuitos em que dois elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn são serialmente conectados são conectados em paralelo a um lado primário de um transformador 51. Então, um circuito de ponte em que três linhas conectadas entre os respectivos pares de elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn são eletricamente conectados a seções de saída trifásicas de fonte de alimentação de corrente alternada 1 constitui um conversor de matriz trifásico em unifásico 4.
[031] O circuito de transformador de alta frequência 5 é dotado de um transformador 51 e de um circuito de ponte retificador 52 e é conectado entre o conversor de matriz 4 e o filtro de saída 6. O circuito de transformador de alta frequência 5 converte a energia elétrica de corrente alternada de alta frequência inserida a partir do conversor de matriz 4 em uma energia elétrica de corrente direta e fornece a energia elétrica de corrente direta a uma bateria 7 através do filtro de saída 6. O transformador 51 aumenta a tensão de corrente alternada de alta frequência inserida a partir do conversor de matriz 4 e emite esta corrente alternada aumentada ao circuito de ponte retificador 52. Deve-se notar que, visto que a energia elétrica de corrente alternada emitida a partir do conversor de matriz 4 é a alta frequência, um transformador de pequenas di- mensões pode ser usado como o transformador 51. O circuito de ponte retifica- dor 52 é um circuito no qual se conecta uma pluralidade de diodos em uma configuração de ponte e serve para converter uma corrente alternada lateral secundária do transformador 51 em corrente direta.
[032] O filtro de saída 6 é constituído por um circuito LC de uma bobina 61 e um capacitor 62 e é conectado entre o circuito de transformador de alta frequência 5 e a bateria 7. O filtro de saída 6 retifica a energia elétrica de corrente direta emitida a partir do circuito de transformador de alta frequência 5 e fornece a energia elétrica de corrente direta à bateria 7. A bateria 7 é uma célula secundária carregada pelo sistema de carregamento nesta modalidade e é constituída, por exemplo, por uma bateria recarregável de íon de lítio. A bateria 7 é, por exemplo, montada no veículo e proporciona uma fonte dinâmica (potência) do veículo.
[033] Portanto, o sistema de carregamento nesta modalidade converte a corrente alternada proveniente da fonte de alimentação de corrente alternada 1 em uma corrente alternada de alta frequência, aumenta a corrente alternada de alta frequência através do circuito de transformador de alta frequência 5, converte a corrente alternada aumentada em corrente direta, e fornece a energia elétrica de corrente direta de alta tensão aumentada à bateria 7.
[034] Os recursos do sistema de carregamento mostrado na Figura 1 que usa o dispositivo de conversão de energia elétrica nesta modalidade serão explicados enquanto comparados a um exemplo comparativo 1 e a outro exemplo comparativo 2 descritos abaixo. A Figura 2 mostra um diagrama de blocos do sistema de carregamento relacionado ao exemplo comparativo 1 e a Figura 3 mostra um diagrama de blocos do sistema de carregamento relacio-nado ao exemplo comparativo 2.
[035] Assim como um sistema de carregamento diferente da modalidade preferencial de acordo com a presente invenção, conhece-se um sistema, conforme mostrado na Figura 2, que a energia elétrica de corrente alternada fornecida a partir da fonte de alimentação de corrente alternada 1 é passada através de um transformador 101 e é convertida em energia elétrica de corrente direta através de um retificador 102 (exemplo comparativo 1).
[036] Além disso, como outro sistema de carregamento diferente do sistema de carregamento nesta modalidade, conhece-se um sistema, conforme mostrado na Figura 3, que a corrente alternada a partir da fonte de alimentação de corrente alternada 1 é convertido em corrente direta através de um retifica- dor PWM 201, a corrente direta é invertida na corrente alternada através de um circuito inversor 203 de um lado primário do circuito de transformador de alta frequência 202, a corrente alternada convertida é aumentada por meio de um transformador 204, a corrente alternada aumentada é convertida em corrente direta através de uma circuito de ponte retificador 205 do circuito de transformador de alta frequência 202, e a corrente direta é fornecida à bateria 7 (exemplo comparativo 2).
[037] Em um caso do exemplo comparativo 1, uma estrutura de circuito é simples, porém, um transformador 101 se torna grande em tamanho. Além disso, há um problema de modo que se torna necessário conectar um capacitor de eletrólito de grande capacidade entre o retificador 102 e o pulsador de aumento de tensão 103.
[038] Em um caso do exemplo comparativo 2, embora um transformador de pequenas dimensões possa ser usado como um transformador 204, uma perda se torna grande visto que o número de vezes de conversões é grande. Além disso, há um problema de modo que seja necessário conectar um capacitor de eletrólito de grande capacidade entre o retificador PWM 201 e o transformador de alta frequência 202.
[039] Nesta modalidade, visto que, conforme descrito anteriormente, um uso de um conversor de matriz 4 pode reduzir a perda causada pela con- versão de energia elétrica, pode tornar o capacitor de eletrólito de grande capacidade no lado primário do transformador 51 necessário, e pode alcançar as pequenas dimensões do transformador 51.
[040] A seguir, o controlador 10 que controla o conversor de matriz 4 incluído no dispositivo de conversão de energia elétrica nesta modalidade será explicado abaixo com referência à Figura 4. A Figura 4 mostra um diagrama de blocos de um controlador 10.
[041] O controlador 10 liga e desliga os elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn e controla o conversor de matriz 4 através de um controle PWM. O controlador 10 inclui: uma seção de transformação de coordenadas 11; uma seção de modulação de vetor espacial 12; uma seção de cálculo do tempo de vetor zerado 13; uma tabela de padrão de comutação 14; e uma seção de geração de sinal de comutação 15.
[042] A seção de transformação de coordenadas 11 compara as tensões detectadas por meio dos sensores de tensão 31, 32, 33, toma uma relação de magnitude entre elas, realiza uma conversão trifásica em bifásica para as tensões detectadas (Vr, Vs, Vt) em um sistema de coordenadas fixas a serem convertidas em tensões (vα, vβ) em um sistema de coordenadas estáticas, e emite as tensões (vα, vβ) à seção de modulação de vetor espacial 12. A seção de modulação de vetor espacial 12 substitui as formas de onda de tensão trifásica em um vetor que utiliza uma modulação de vetor espacial. Portanto, os tempos de saída (T1, T2) dos vetores de tensão são calculados utilizando-se um ângulo de fase (θ) de tensões (vα, vβ).
[043] A seção de cálculo do tempo de vetor zerado 13 calcula um tempo de saída (Tz) de vetor zerado usando um sinal portador, tal como uma onda triangular e o tempo calculado pela seção de modulação de vetor espacial 12. Uma frequência do sinal portador é ajustada como sendo maior que uma frequência da energia elétrica de corrente alternada da fonte de alimentação de corrente alternada 1. Uma tabela de padrão de comutação 14 armazena um padrão de comutação predefinido para realizar uma comutação de elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn correspondentes ao ângulo de fase (θ) sob a forma de uma tabela.
[044] A seção de geração de sinal de comutação 15 extrai o padrão de comutação correspondente ao ângulo de fase (θ) referindo-se à tabela de padrão de comutação 14 e emite os sinais de controle (Drp, Drn, Dsp, Dsn, Dtp, Dtn) para ligar ou desligar os elementos de comutação (Srp, Srn, Ssp, Ssn, Stp, Stn) usando o padrão de comutação extraído, os tempos de saída (T1, T2) do vetor de tensão, e o tempo de saída (Tz) do vetor zerado a um circuito de acionamento (não mostrado) incluído no conversor de matriz 4. Os elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn são controlados por sinais de pulso. Portanto, o ligamento e o desligamento dos elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn incluídos no conversor de matriz 4 são comutados para ligar e desligar por meio do controle do controlador 10 e a energia elétrica é convertida.
[045] A seguir, um controle de comutação dos elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn será descrito utilizando-se a Figura 5.
[046] A Figura 5 mostra um gráfico que representa uma sequência da comutação aos elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn.
[047] Na Figura 5, um alto nível denota um estado ligado e um nível baixo denota um estado desligado. Um sistema (método) de comutação de tensão é usado para a comutação dos elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn. O controlador 10 monitora uma relação de magnitude das tensões de entrada a partir das tensões detectadas (Vr, Vs, Vt) para realizar a comutação. Supõe-se que o estado de Trrp1, Trrp2, Trsp1, Trsp2 seja transitado a partir de um estado inicial em uma sequência de i, ii, iii, e iv.
[048] Nas partes que se seguem do presente documento, um exemplo específico do sistema (método) de comutação de tensão será descrito abaixo.
[049] Por motivos de simplicidade de explicação, somente o controle de comutação para um circuito de braço superior do conversor de matriz 4 será descrito abaixo.
[050] Supõe-se que os transistores Trrp1, Trrp2 incluídos no elemento de comutação Srp estejam em um estado ligado e os transistores Trsp1, Trsp2 incluídos no elemento de comutação Ssp estejam em um estado desligado. Então, um caso em que, em um estado no qual a tensão do elemento de comutação Srp é maior que a tensão do elemento de comutação Ssp, a comutação é realizada a partir do elemento de comutação Srp à tensão ao elemento de comutação Ssp será explicado abaixo.
[051] Primeiramente, quando o estado for transitado a partir do estado inicial para o estado (i), o transistor Trsp1 é ligado, quando o estado for transitado a partir do estado (i) para o estado (ii), o transistor Trrp1 é desligado, quando o estado for transitado a partir do estado (ii) para o estado (iii), o transistor Trsp2 é ligado, e quando o estado for transitado a partir do estado (iii) para o estado (iv), o transistor Trrp2 é desligado. Isto induz a comutação dos elementos de comutação de modo que a fonte de alimentação de corrente alternada 1 não sofra curto-circuito. Portanto, suprime-se uma falha de comutação.
[052] A seguir, o controle no controlador 10 será descrito abaixo utilizando-se as Figuras 1, 4, e 6 a 12.
[053] Quando a tensão (Vα, Vβ) nas coordenadas do sistema de coordenadas estáticas transformadas e calculadas pela seção de transformação de coordenadas 11 for inserida à seção de modulação de vetor espacial 12, a seção de modulação de vetor espacial 12 calcula o ângulo de fase (θ) de tensão (vα, vβ) a partir da tensão inserida (vα, vβ). Deve-se notar que a tensão (vα, vβ) e o ângulo de fase (θ) são representados por um vetor conforme mostrado na Figura 6. A Figura 6 mostra um diagrama vetorial em que as tensões detectadas (Vr, Vs, Vt) são convertidas em sistemas de coordenadas α β bifásicos e as tensões de entradas são observadas como vetores de tensão no sistema de coordenadas estáticas. Va na Figura 6 representa um vetor de base e corresponde a um valor de comando de saída tendo o ângulo de fase (θ) da tensão de entrada no sistema de coordenadas α β. O vetor de base é girado com um ponto central mostrado na Figura 6 como um centro de acordo com uma relação de magnitude dentre as tensões de entrada das respectivas fases.
[054] Nesta modalidade, no sistema de coordenadas estáticas, as coordenadas são divididas em 60 graus em seis áreas a partir do eixo geométrico α na direção em sentido anti-horário. Os eixos geométricos de V1 a V6 são alocados às linhas limiares das respectivas áreas. A área entre V1 e V2 é presumida como a “área 1”, a área entre V2 e V3 é presumida como a “área 2”, a área entre V3 e V4 é presumida como a “área 3”, a área entre V4 e V5 é presumida como a “área 4”, a área entre V5 e V6 é presumida como a “área 5”, e a área entre V6 e V1 é presumida como a “área 6”. Além disso, V7 a V9 são alocados a uma origem.
[055] Então, os vetores de V1 a V9 são vetores de tensões emitidas a partir do conversor de matriz 4. Os vetores de V1 a V6 tendo magnitudes como os vetores (diferentes de zero) representam que as tensões diferentes de zero são emitidas a partir do conversor de matriz 4. Isto é, os vetores de V1 a V6 correspondem aos vetores de tensão diferentes de zero (nas partes que se seguem do presente documento, referidos como vetores de tensão). Por outro lado, os vetores de V7 a V9 representam vetores de tensão zero (tensão igual a zero) (nas partes que se seguem do presente documento, referidos como vetores zerados).
[056] Além disso, nesta modalidade, os vetores de tensão V1 a V9 são feitos correspondes a padrões de comutação mutuamente diferentes de ele- mentos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn e os padrões de comutação para operar os elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn são determinados dependentes da área à qual as tensões de entrada pertencem. Deve-se notar que uma relação entre os vetores de tensão V1 a V9 e o padrão de comutação será descrita mais adiante.
[057] Então, a seção de modulação de vetor espacial 12 determina à qual área a tensão de entrada em um ponto de tempo de detecção pertence a partir do ângulo de fase (θ) do vetor de base va. No exemplo mostrado na Figura 6, visto que o vetor de base va está dentro da área 1, a seção de modulação de vetor espacial 12 determina que a tensão de entrada pertence à área 1 a partir do ângulo de fase (θ) de tensão (vα,vβ). Além disso, por exemplo, em um caso onde a relação de magnitude das tensões de entrada (Vr, Vs, Vt) das respectivas fases é alterada e o ângulo de fase (θ) das coordenadas das tensões de eixo geométrico αβ (vα^ vβ) transformadas de acordo com a seção de transformação de coordenadas 11 indica 90 graus, a seção de modulação de vetor espacial 12 identifica uma área 2 incluindo um ângulo de fase de 90 graus.
[058] A seção de modulação de vetor espacial 12 calcula um tempo de saída do vetor de tensão a partir de um componente de eixo geométrico de área do vetor de base (Va) quando a área for identificada.
[059] No caso do exemplo mostrado na Figura 6, o vetor de base (Va) pertence à área 1. A seção de modulação de vetor espacial 12 calcula um componente (Va1) ao longo do eixo geométrico V1 e um componente (Va2) ao longo do eixo geométrico V2 usando o eixo geométrico V1 e o eixo geométrico V2 que são eixos geométricos da área 1. Então, a magnitude (Va1) do componente de eixo geométrico V1 é o tempo de saída do padrão de comutação correspondente a V1 e a magnitude (Va2) do componente de eixo geométrico V2 é o tempo de saída do padrão de comutação correspondente a V2. No presen te documento, deve-se notar que os tempos de saída dos vetores de tensão V1 a V6 são presumidos como T1, T2 e os tempos de saída de vetores zerados (V7 a V9) são presumidos como Tz. Conforme será descrito mais adiante, nesta modalidade, dois vetores de tensão são emitidos durante um meio período de uma primeira metade de um portador. Logo, o tempo de saída de um primeiro vetor de tensão a partir dos dois vetores de tensão é presumido como um T1 e o tempo de saída de um segundo vetor de tensão é presumido como um T2.
[060] Cada tempo de saída (T1, T2, Tz) é representado por um tempo normalizado correspondente ao período do portador.
[061] Conforme será descrito mais adiante, nesta modalidade, a fim de manter o tempo de saída (Tz) de vetores zerados (V7 a V9) por meio período do portador, impõe-se uma limitação aos tempos de saída (T1, T2, Tz). A seção de modulação de vetor espacial 12 calcula os tempos de saída (T1, T2) de modo que cada um dos tempos de saída (T1, T2) durante os quais um dos dois vetores de tensão correspondentes é emitido seja igual ou menor que o menor valor limite predeterminado. Deve-se notar que o menor valor limite predeterminado corresponde a um tempo durante o qual o tempo de saída (Tz) é mantido e é ajustado a um tempo mais curto que o tempo correspondente ao meio período do portador.
[062] A área 1 é uma região entre o ângulo de fase de 0 grau a 60 graus. Por exemplo, em um caso onde o ângulo de fase de vetor de base (va) se encontra entre 0 grau e 30 graus, a magnitude (Va1) do componente do eixo geométrico V1 é maior que a magnitude (Va2) do componente do eixo geométrico V2. Logo, o tempo de saída (T1) do padrão de comutação V1 é mais longo que o tempo de saída (T2) do padrão de comutação V2. A área 4 é uma região entre o ângulo de fase de 180 graus e o ângulo de fase de 240 graus. Por exemplo, o ângulo de fase de vetor de base (va) varia de 210 graus a 240 graus, a magnitude (Va5) do componente do eixo geométrico V5 é maior que a magnitude (Va4) do componente do eixo geométrico V4. Logo, o tempo de saída (T2) do padrão de comutação V5 é maior longo que o tempo de saída (T1) do padrão de comutação de V4.
[063] Portanto, a seção de modulação de vetor espacial 12 calcula o ângulo de fase (θ) usando vα, vβ correspondente às tensões detectadas das respectivas fases, calcula os tempos de saída (T1, T2) dos vetores de tensão a partir do vetor de base Va tendo o ângulo de fase calculado (θ) como o componente direcional, e emite os tempos de saída calculados (T1, T2) à seção de cálculo do tempo de vetor zerado 13.
[064] A seção de cálculo do tempo de vetor zerado 13 subtrai um tempo total do tempo de saída (T1) e do tempo de saída (T2) a partir de um meio período predeterminado do período do portador para calcular o tempo do vetor zerado (Tz). Visto que a seção de modulação de vetor espacial 12 calcula o tempo de saída (T1) e o tempo de saída (T2) de modo que o tempo total descrito anteriormente seja igual ou menor que o menor tempo de limite predeterminado, a seção de cálculo do tempo de vetor zerado 13 pode calcular o tempo do vetor zerado (Tz). Nesta modalidade, a fim de proporcionar a corrente alternada para a energia elétrica de saída do conversor de matriz 4, o tempo no qual a tensão diferente de zero é emitida e o tempo no qual a tensão zerada é emitida são periodicamente proporcionados.
[065] Visto que o período do portador corresponde ao período da tensão de saída, o tempo de saída (Tz) do vetor zerado é uma subtração do tempo de saída (T1) e do tempo de saída (T2) a partir do tempo correspondente ao meio período do portador. A seção de cálculo do tempo de vetor zerado 13 emite o tempo (Tz) do vetor zerado e os tempos (T1, T2) dos vetores de tensão a uma seção de geração de sinal de comutação 15.
[066] A seção de geração de sinal de comutação 15 gera sinais de comutação para acionar os elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn usando o padrão de comutação armazenado na tabela de padrão de comutação 14, o tempo do vetor zerado (Tz), e os tempos (T1, T2) dos vetores de tensão.
[067] Antes de os conteúdos de controle da tabela de padrão de comutação 14 e da seção de geração de sinal de comutação 15 serem descritos em detalhes, a relação entre os vetores de (V1 a V9) e o ângulo de fase (θ) e o padrão de comutação será descrita mais adiante utilizando-se as Figuras 7 (a) e 7(b).
[068] A Figura 7(a) é uma vista explicativa do diagrama vetorial da Figura 6 à qual o padrão de comutação é adicionado. A Figura 7(b) mostra um diagrama de circuito simplificado da fonte de alimentação de corrente alternada 1 e do conversor de matriz 4 dentre o sistema de carregamento na Figura 1. Deve-se notar que “1” mostrado na Figura 7(a) denota o estado ligado e “0” denota o estado desligado.
[069] Conforme mostrado nas Figuras 7(a) e 7(b), os vetores (V1 a V9) correspondem ao padrão de comutação dos elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn.
[070] No vetor de tensão (V1), os elementos de comutação Srp, Stn são ligados e os outros elementos de comutação Srn, Ssp, Ssn, Stp são desligados. No vetor de tensão (V2), os elementos de comutação Ssp, Stn são ligados e os outros elementos de comutação Srp, Srn, Ssn, Stp são desligados. No vetor de tensão (V3), os elementos de comutação Srn, Ssp são ligados e os outros elementos de comutação Srp, Ssp, Stp, Stn são desligados.
[071] No vetor de tensão (V4), os elementos de comutação Srn, Stp são ligados e os outros elementos de comutação Srp, Ssp, Ssn, Stn são desligados. No vetor de tensão (V5), os elementos de comutação Ssn, Stp são ligados e os outros elementos de comutação Srp, Srn, Ssp, Stp, Stn são desligados. No vetor de tensão (V6), os elementos de comutação Srp, Ssn são ligados e os outros elementos de comutação Srn, Ssp, Stp, Stn são desligados.
[072] Isto é, nos vetores de tensão (V1 a V6), um dos elementos de comutação Srp, Ssp, Stp, do circuito de braço superior incluído em uma fase dentre as respectivas fases é ligado e os outros elementos de comutação Srp, Ssp, Stp do circuito de braço superior incluídos nas outras fases são desligados, pelo menos um dos elementos de comutação Srn, Ssn, Stn de um circuito de braço inferior incluído nas outras fases é ligado e os outros elementos de comutação Srn, Ssn, Stn do circuito de braço inferior incluído em uma fase são desligados.
[073] Então, em um caso onde os elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn são controlados através do padrão de comutação correspondente aos vetores de tensão (V1 a V6), a tensão diferente de zero é emitida ao lado de saída do conversor de matriz 4. Além disso, visto que dois vetores que proporcionam limites das duas áreas adjacentes são usados de acordo com as áreas, as formas de onda de diferentes níveis de tensão podem ser emitidas a partir do conversor de matriz 4.
[074] Além disso, nos diagramas vetoriais mostrados nas Figuras 6, 7(a), e 7(b), o padrão de comutação é alocado aos vetores zerados (V7 a V9) mostrados em uma origem da Figura 7(a). No vetor (V7), os elementos de comutação Srp, Srn são ligados e os outros elementos de comutação Ssp, Ssn, Stp, Stn são desligados. No vetor (V8), os elementos de comutação Ssp, Ssn são ligados e os outros elementos de comutação Srp, Srn, Stp, Stn, são desligados. No vetor (V9), os elementos de comutação Stp, Stn são ligados e os outros elementos de comutação Srp, Srn, Ssp, Ssn, são desligados.
[075] Isto é, nos vetores zerados (V7 a V9), os elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn incluídos em uma fase dentre as respectivas fases são ligados e os elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn incluídos nas outras fases são desligados.
[076] Em um caso onde os elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn são controlados no padrão de comutação correspondente aos vetores zerados (V7 a V9), a saída do conversor de matriz 4 indica zero.
[077] Conforme descrito anteriormente, uma das áreas é identificada de acordo com o ângulo de fase (θ). Então, os vetores de tensão de saída (V1 a V6) e o tempo de saída (T1, T2) são determinados. Além disso, a seção de cálculo do tempo de vetor zerado 13 calcula os vetores zerados (V7 a V9) e o tempo de saída (Tz) destes. Visto que o conversor de matriz 4 é ajustado com a saída da energia elétrica de corrente alternada como um objeto, elementos de comutação de reversão e controle Srp, Srn, Ssp, Ssn, Stp, Stn em uma segunda metade do período do portador, para o controle de comutação em uma primeira metade do período do portador, de modo que a energia elétrica de saída tendo uma polaridade reversa à primeira metade do período do portador possa ser obtida.
[078] Então, nesta modalidade, a tabela de padrão de comutação 14 armazena o padrão de comutação que se torna correspondente às áreas da Figura 6. Além disso, a seção de geração de sinal de comutação 15 calcula os respectivos tempos de saída dos vetores (V1 a V9) para o período de portador a partir dos tempos de saída (T1, T2) dos vetores de tensão e do tempo de saída (Tz) dos vetores zerados e gera os sinais de comutação.
[079] A seguir, a tabela armazenada na tabela de padrão de comutação 14 será descrita utilizando-se a Figura 8. A Figura 8 é um diagrama concei- tual que representa a tabela armazenada na tabela de padrão de comutação 14.
[080] Na Figura 8, as áreas 1 a 6 correspondem às áreas 1 a 6 mostradas na Figura 6. V1 a V9 correspondem aos vetores (V1 a V9). Na Figura 8, Srp, Srn, Ssp, Ssn, Stp, Stn correspondem aos elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn. Além disso, para os estados (1) a (6) na Figura 8, visto que um período do portador é dividido em seis quando tornado correspondente aos tempos de saída (T1, T2, Tz), os estados (1) a (6) são derivados em uma série de tempo a partir de uma seção de ponto de pico de um vale do portador.
[081] A fim de emitir a corrente alternada a partir do conversor de matriz 4, a tabela de padrão de matriz 14 ajusta o padrão de comutação de modo que os dois vetores de tensão e um vetor zerado sejam sequencialmente emitidos no primeiro (prévio) meio período do período do portador e os dois vetores de tensão e um vetor zerado sejam sequencialmente emitidos no segundo (último) meio período do período do portador.
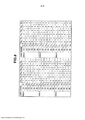
[082] Por exemplo, em um caso onde o vetor de base (va) pertence à área 1, os elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn são controlados em uma sequência de vetor de tensão (V1), vetor de tensão (V2), vetor zerado (V8), vetor de tensão (V5), vetor de tensão (V4), e vetor zerado (V7) por período do portador. A transição do controle de elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn na área 1 é mostrada na Figura 9. A Figura 9 mostra um diagrama de circuito ao qual o diagrama de circuito da fonte de alimentação de corrente alternada 1 e do conversor de matriz 4 é simplificado.
[083] O estado ligado ou desligado dos respectivos elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn nos respectivos estados (1) a (6) e a direção que flui através do lado primário do transformador 51 são denotados por setas.
[084] Conforme mostrado nas Figuras (1) a (6) da Figura 9, em um caso onde a transição é feita a partir de um estado ao estado subsequente tal como a partir do estado (1) ao estado (2), a partir do estado (2) ao estado (3) e assim por diante, o controlador 10 liga (liga a partir do estado desligado) os elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn de um circuito de braço do circuito de braço superior e do circuito de braço inferior e mantém o estado ligado dos elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn do outro cir- cuito de braço. Em outras palavras, dentre os elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn cada um desses se encontra em um estado ligado, um dos elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn é desligado, mas o estado do outro dos elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn é mantido (fixo).
[085] Além disso, em um caso onde cada estado é continuamente transitado, tais como os estados (1), (2), e (3), os estados (3), (4), e (5), ou similares, os elementos de comutação Srp, Ssp, Stp, do circuito de braço superior ou os elementos de comutação Srn, Ssn, Stn do circuito de braço inferior não são continuamente comutados. Em outras palavras, os elementos de comutação de Srp, Srn, Ssp, Ssn, Stp, Stn são alternadamente comutados entre o circuito de braço superior e o circuito de braço inferior.
[086] Portanto, nesta modalidade, o número de vezes que a comutação dos elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn é realizada quando o estado for transitado dentre os respectivos estados (1) a (6) é reduzido para suprimir a falha de comutação. Deve-se notar que o padrão de comutação da área 1 foi explicado, mas, para as áreas da área 2 a área 6, o mesmo controle de comutação é realizado sob as mesmas condições de acordo com o padrão que reduz o número de vezes em que a comutação é realizada.
[087] Deve-se notar que, conforme mostrado em (1) a (6) da Figura 9, nos estados (1) a (3), a corrente de saída do conversor de matriz 4 indica um sinal positivo, mas nos estados (4) a (6), a corrente de saída do conversor de matriz 4 indica um sinal negativo. Portanto, a saída do conversor de matriz 4 indica a corrente alternada controlando-se os elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn no padrão de comutação da área 1 da tabela de padrão de comutação 14. Deve-se notar, também, que, para a área 2, área 3, área 4, área 5, e área 6, o controle de comutação no padrão mostrado na Figura 8 é realizado similarmente para proporcionar a corrente alternada para a saída do conversor de matriz 4.
[088] Então, visto que as áreas 1 a 6 são classificadas de acordo com o ângulo de fase, a tabela de padrão de comutação 14 armazena o padrão de comutação correspondente ao ângulo de fase (θ).
[089] A seguir, o controle da seção de geração de sinal de comutação 15 será descrita utilizando-se a Figura 10.
[090] A Figura 10 é um gráfico para explicar uma relação entre o portador e os tempos de saída (T1, T2, Tz).
[091] Primeiramente, a seção de geração de sinal de comutação 15 ajusta os valores de comando correspondentes aos tempos de saída (T1 , T2) tomando uma sincronização com o período do portador.
[092] Visto que o controlador 10 realiza o controle de comutação através de um método de controle de PWM, os comprimentos dos tempos de saída (T1, T2, Tz) dos vetores de tensão e do vetor zerado indicam o valor de comando (um valor de tensão).
[093] Quando os valores de comando forem ajustados para os tempos de saída (T1, T2, Tz), os valores de comando são normalizados de modo que uma amplitude máxima do portador se torne os tempos de saída (T1, T2, Tz) aos quais dois vetores de tensão e um vetor zerado são emitidos. Além disso, para temporizações de saída dos vetores de tensão e do vetor zerado, no primeiro meio período do período do portador, os valores de comando são ajustados de modo que os vetores de tensão no lado em sentido mais horário sejam inicialmente emitidos nas respectivas áreas 1 a 6 dentre os vetores de tensão (V1 a V6) mostrados na Figura 6. Após os dois vetores de tensão serem emitidos, os valores de comando são ajustados de modo que os vetores zerados (V7 a V9) sejam emitidos.
[094] Por outro lado, os valores de comando são ajustados de modo que, no segundo meio período do portador, os tempos de saída dos dois veto- res (V1 a V6) sejam revertidos a partir daqueles no primeiro meio período do período do portador e emitidos e, posteriormente, os vetores zerados (V7 a V9) são emitidos.
[095] Como um exemplo específico, em um caso onde o ângulo de fase (θ) se encontra em uma faixa de 0 grau a 30 graus (área 1), conforme mostrado na Figura 10, a seção de geração de sinal de comutação 15 ajusta o valor de comando (T1) em um nível correspondente ao tempo de saída (T1) em relação ao nível baixo do portador e ajusta o valor de comando (T2) adicionando- se o nível correspondente ao tempo de saída (T2) com o valor de comando (T1) como uma referência, no primeiro meio período do portador. Por outro lado, no segundo meio período do portador, a seção de geração de sinal de comutação 15 ajusta o valor de comando (T2) no nível correspondente ao tempo de saída (T2) reduzido a partir do alto nível do portador e ajusta o valor de comando (T1) no nível correspondente ao tempo de saída (T1) com o valor de comando (T2) como a referência.
[096] A seção de geração de sinal de comutação 15 compara o portador com os valores de comando ajustados para determinar as temporizações de saída dos vetores de tensão e do vetor zerado.
[097] Além disso, conforme descrito anteriormente, os valores de comando são ajustados em relação aos tempos de saída (T1, T2, Tz) e são comparados ao portador de modo que os seis estados por período do portador sejam separados. No entanto, os seis estados correspondem aos estados (1) a (6) mostrados na Figura 8. Isto é, a seção de geração de sinal de comutação 15 compara os tempos de saída (T1, T2, Tz) com o portador para determinar as temporizações de saída do padrão de comutação armazenado na tabela de portador de comutação 14.
[098] A seção de geração de sinal de comutação 15 compara o portador com os tempos de saída (T1, T2, Tz) para determinar as temporizações de saída conforme mostrado na Figura 10. Neste momento, a seção de geração de sinal de comutação 15 extrai o padrão de comutação de acordo com o ângulo de fase (θ) da tabela de padrão de comutação 14, gera os sinais de comutação para que os elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn sejam acionados de acordo com o padrão extraído nas temporizações de saída, e emite os sinais de comutação aos elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn.
[099] De modo específico, em um caso onde o ângulo de fase (θ) se encontra dentro da faixa de 0 grau a 30 graus, o padrão de comutação da área 1 na Figura 8 é usado. Durante o tempo de saída (T1) com o ponto de pico do vale do portador como um ponto de partida, o controle de comutação que emite o vetor de tensão (V1) é realizado. Durante o tempo de saída subsequente (T2), o controle de comutação ao emitir o output vetor de tensão (V2) é realizado. Durante o tempo de saída subsequente adicional (Tz), o controle de comutação para emitir o vetor zerado (V8) é realizado. Então, no segundo meio período do portador, durante o tempo de saída (T2) com um pico de montanha do portador como o ponto de partida, o controle de comutação para emitir o portador de tensão (V5) é realizado. Durante o tempo de saída subsequente (T1), o controle de comutação para emitir o vetor de tensão (V4) é realizado. Durante o tempo de saída adicional (Tz), o controle de comutação para emitir o vetor ze- rado (V7) é realizado.
[100] A forma de onda de tensão de saída do conversor de matriz 4 será descrita utilizando-se as Figuras 11 e 12.
[101] A Figura 11 mostra uma característica de tempo da forma de onda de tensão de saída do conversor de matriz 4 em um caso onde o tempo de saída (T1) é mais longo que o tempo de saída (T2).
[102] A Figura 12 mostra outra característica de tempo da forma de onda de tensão de saída do conversor de matriz 4 em um caso onde o tempo de saída (T2) é mais longo que o tempo de saída (T1).
[103] Em um caso onde o ângulo de fase (θ) se encontra em uma faixa de 0 grau a 30 graus, o tempo de saída (T1) se torna mais longo que o tempo de saída (T2). Portanto, a forma de onda de tensão emitida a partir do conversor de matriz 4 é transitada conforme mostrado na Figura 12. Além disso, em um caso onde o ângulo de fase (θ) se encontra dentro de 30 graus a 60 graus, o tempo de saída (T2) se torna mais longo que o tempo de saída (T1) e a forma de onda de tensão de saída emitida a partir do conversor de matriz 4 é transitada conforme mostrado na Figura 12.
[104] Conforme descrito anteriormente, nesta modalidade, os elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn são controlados utilizando-se os tempos de saída (T1, T2) que emitem os vetores de tensão e o tempo de saída (Tz) que emite o vetor zerado para tornar o tempo de saída (Tz) incluído no primeiro meio período do portador igual ao tempo de saída (Tz) incluído no segundo meio período do portador. Conforme descrito anteriormente, visto que o tempo de saída (Tz) do vetor zerado é proporcionado, um intervalo entre a ope-ração de comutação no ponto de tempo inicial do tempo de saída (Tz) do vetor zerado e a operação de comutação no último tempo do tempo de saída (Tz) é mantido de modo que uma sobreposição entre as operações de comutação no tempo inicial e no último tempo e a falha de comutação possa ser evitada.
[105] De modo incidental, conforme é diferente desta modalidade, conhece-se um dispositivo inversor (um exemplo comparativo 3) no qual, em um circuito inversor trifásico formado por um circuito de ponte tendo uma pluralidade de elementos de comutação, com tensões detectadas de tensões intermediárias das respectivas fases ajustadas como valores de comando (vu*, vv*, vw*), as tensões detectadas são comparadas com um portador de onda triangular para controlar os elementos de comutação.
[106] A Figura 13 mostra formas de onda do portador e valores de co- mando (vu*, vv*, vw*) e a forma de onda da tensão de saída do circuito inver- sor.
[107] Conforme mostrado na Figura 13, o exemplo comparativo 3 usa uma equação teórica que controla o nível da tensão de saída quando o portador exceder o valor de comando e controlar a fim de reverter a equação teórica com a montanha e o vale do portador como limites. Isto é, no exemplo comparativo 3, o nível da tensão de saída é ajustado pela comparação das tensões detectadas e do portador e o controle da saída da corrente alternada é realizado. Logo, os intervalos de tensão zerada (correspondem a α1, β1 na Figura 13) são desviados em relação ao período do portador.
[108] Então, visto que um dos intervalos de tensão zerada (α1 na Figura 13) se torna relativamente curto, o intervalo das operações de comutação se torna correspondentemente curto no primeiro ponto de tempo do intervalo de tensão zerada e no último ponto de tempo do intervalo de tensão zerada. Consequentemente, ocorre uma falha de comutação.
[109] Além disso, neste exemplo comparativo 3, o intervalo de tensão zerada não é prescrito como um intervalo predeterminado em relação ao período do portador. Portanto, ocorre um problema no qual o controle do tempo durante o qual a tensão zerada é emitida se torna complicado.
[110] Visto que, nesta modalidade, o tempo de saída (Tz) do vetor ze- rado em relação ao período do portador é mantido, evita-se que o intervalo das operações de comutação no ponto de tempo inicial do intervalo de tensão ze- rada e no último ponto de tempo do intervalo de tensão zerada seja encurtado e a falha de comutação pode ser evitada.
[111] Isto é, conforme mostrado na Figura 14, o intervalo de saída do vetor zerado é igualmente alocado a cada meio período do portador. Logo, o tempo de saída (Tz) do vetor zerado não é extremamente encurtado de modo que se possa evitar que a falha de comutação ocorra.
[112] Além disso, o número de vezes que um pulso curto é golpeado ao controlar os elementos de comutação Srp, Srn, Ssp, Ssn, Stp, Stn pode ser reduzido de modo que tais inconveniências que uma carga é concentrada nos elementos de comutação e aplicada aos elementos de comutação possam ser evitadas. Adicionalmente, nesta modalidade, as funções dos sinais de comutação ao realizar o controle de PWM e o padrão de comutação podem ser livremente ajustadas. Deve-se notar que a Figura 14 mostra um gráfico para explicar a relação entre o portador e os tempos de saída (T1, T2, Tz) e mostra uma característica de tempo da tensão de saída do conversor de matriz 4.
[113] Além disso, nesta modalidade, em um caso onde uma transição contínua é feita entre os tempos de saída (T1, T2) e os tempo de saída (Tz), os elementos de comutação (Srp, Ssp, Stp) do circuito de braço superior ou os elementos de comutação (Srn, Ssn, Stn) do circuito de braço inferior não são continuamente comutados. Portanto, em um caso onde a transição contínua entre o estado em que o vetor de tensão é emitido e o estado em que o vetor zerado é emitido, o número de vezes que a comutação é realizada pode ser reduzido. Consequentemente, pode-se evitar que a falha de comutação ocorra.
[114] Além disso, nesta modalidade, os tempos de saída (T1, T2, Tz) são calculados a partir das tensões transformadas pela seção de transformação de coordenadas 11, a tabela de padrão de comutação 14 é referida, e os elementos de comutação (Srp, Srn, Ssp, Ssn, Stp, Stn) são controlados através do padrão de comutação correspondente à fase de tensão convertida. Portanto, visto que o tempo de saída (Tz) do vetor zerado é mantido, a falha de comutação pode ser evitada.
[115] Além disso, nesta modalidade, os elementos de comutação são controlados através do tempo de saída (T1) durante o qual um elemento de comutação dentre os elementos de comutação incluídos no circuito de braço superior é ligado e um elemento de comutação dentre os elementos de comu- tação incluídos no circuito de braço inferior é ligado e o tempo de saída (T2) durante o qual outro elemento de comutação dentre os elementos de comutação incluídos no circuito de braço superior é ligado e o outro elemento de comutação dentre os elementos de comutação incluídos no circuito de braço inferior é ligado. Portanto, visto que o tempo de saída do vetor zerado é mantido, pode-se evitar a sobreposição das operações de comutação entre o primeiro ponto de tempo do tempo de saída do vetor zerado e o último ponto de tempo deste. Consequentemente, a falha de comutação pode ser evitada.
[116] Além disso, nesta modalidade, o tempo de saída (T1) é um tempo antes do tempo de saída (T2) no primeiro meio período (inicial) do portador e o tempo de saída (T1) é um tempo após o tempo de saída (T2) no último meio período do portador. Isto pode obter uma equalização do tempo de saída do vetor zerado de acordo com um lado positivo e um lado negativo da tensão de saída do conversor de matriz 4.
[117] Deve-se notar que, nesta modalidade, com o pico (ponto) do vale do portador como o ponto de partida, os tempos de saída (T1, T2) dos dois vetores de tensão são primeiramente dispostos e, subsequentemente, o tempo de saída (Tz) do vetor zerado é disposto. No entanto, nem sempre é necessário dispor os tempos de saída nesta sequência.
[118] Por exemplo, conforme mostrado na Figura 15, para o meio período do portador, a metade do tempo (Tz/2) do tempo de saída (Tz) do vetor zerado pode ser disposta, subsequentemente, os tempos de saída (T1, T2) dos dois vetores de tensão podem ser dispostos, e, finalmente, a metade do tempo (Tz/2) do tempo de saída restante (Tz) pode ser disposta.
[119] Além disso, nesta modalidade, os tempos de saída (T1, T2) e o tempo de saída (Tz) são alocados a fim de corresponder ao meio período do portador. No entanto, nem sempre é necessário corresponder ao meio período do portador.
[120] Estes tempos de saída podem corresponder de modo que sejam mais curtos que o meio período do portador ou, alternativamente, de modo que sejam mais longos que o meio período do portador.
[121] Além disso, um tempo de limite inferior predeterminado na seção de modulação de vetor espacial 12 nem sempre é um tempo mais curto que o meio período do portador, porém, pode ser um tempo mais curto que o tempo parcialmente correspondente ao período do portador.
[122] Além disso, nesta modalidade, os tempos de saída (T1, T2) são controlados para emitir os dois vetores de tensão (V1 a V6) por meio período do portador. Os vetores de tensão nem sempre são os dois vetores de tensão (V1 a V6), porém, pode ser um vetor de tensão único (V1 a V6) ou, alternativamente, três vetores de tensão (V1 a V6). Além disso, o padrão de comutação mostrado na Figura 8 é meramente um exemplo. Outro padrão dos vetores de tensão e dos vetores zerados pode ser substituído e outro padrão de comutação para emitir os vetores de tensão e os vetores zerados pode ser usado.
[123] O conversor de matriz 4 descrito anteriormente corresponde a um circuito de conversão de acordo com a presente invenção, os sensores de tensão 31 a 33 correspondem ao meio de detecção de tensão, o controlador 10 corresponde ao meio de controle, a seção de modulação de vetor espacial 12 e a seção de cálculo do tempo de vetor zerado 13 correspondem à seção de cálculo de tempo de comutação, a seção de geração de sinal de comutação 15 corresponde a uma seção de geração de sinal de controle, os tempos de saída (T1, T2) correspondem a um primeiro tempo de comutação, o tempo de saída (Tz) corresponde a um segundo tempo de comutação, a tabela de padrão de comutação 14 corresponde a uma tabela, e a seção de transformação de coordenadas 11 corresponde ao meio de transformação de coordenadas.
Claims (3)
1. Dispositivo de conversão de energia elétrica, que compreende: um conversor de matriz trifásico para monofásico (4) tendo três pares de elementos de comutação bidirecionalmente comutáveis (Srp, Srn, Ssp, Ssn, Stp, Stn) conectados às respectivas fases (r, s, t) de uma fonte de alimentação de corrente alternada trifásica (1), em que o conversor de matriz é configurado para converter uma energia elétrica de corrente alternada trifásica introduzida da fonte de alimentação de corrente alternada trifásica (1) em uma energia elétrica de corrente alternada monofásica nos três pares de elementos de comuta-ção bidireccionalmente comutáveis, dois dos elementos de comutação bidirec- cionalmente comutáveis (Srp, Srn, Ssp, Ssn, Stp, Stn) estando conectados em série, os três pares dos elementos de comutação bidireccionalmente comutáveis (Srp, Srn, Ssp, Ssn, Stp, Stn) estando conectados em paralelo a um lado primário de um transformador (51), e sendo configurado para formar um circuito em ponte no qual três linhas conectadas entre as respectivas fases dos elementos de comutação (Srp, Srn, Ssp, Ssn, Stp, Stn) são conectados eletricamente às três seções de saída de fase da fonte de alimentação de corrente alternada (1), constituindo o conversor de matriz trifásico para monofásico (4); meio de detecção de tensão (31, 32, 33) para detectar tensões trifási- cas de entrada (Vr, Vs, Vt) ao conversor de matriz (4); e meio de controle (10) para ligar e desligar os elementos de comutação (Srp, Srn, Ssp, Ssn, Stp, Stn) para controlar o conversor de matriz (4), CARACTERIZADO por o meio de controle (10) compreender: uma seção de cálculo de tempo de comutação (12, 13) configurada para calcular um primeiro tempo de comutação (tempo de saída (T1, T2)) durante o qual um dos elementos de comutação de um circuito de braço superior (Srp, Ssp, Stp) dos três pares de elementos de comutação incluídos em uma fase dentre as respectivas fases é ligado, os outros elementos de comutação do circuito de braço superior (Srp, Ssp, Stp) dos três pares de elementos de comutação incluídos nas outras fases são desligados, pelo menos um elemento de comutação de um circuito de braço inferior (Srn, Ssn, Stn) dos três pares de elementos de comutação incluídos nas outras fases é ligado, e os outros elementos de comutação do circuito de braço inferior (Srn, Ssn, Stn) dos três pares de elementos de comutação incluídos em uma fase são desligados usando as tensões detectadas (Vr, Vs, Vt) pelo meio de detecção de tensão e um valor de comando de saída e para calcular um segundo tempo de comutação (tempo de saída Tz) durante o qual os pares de elementos de comutação (Srp, Srn, Ssp, Ssn, Stp, Stn) incluídos na uma fase dentre as respectivas fases são ligados e os outros pares de elementos de comutação (Srp, Srn, Ssp, Ssn, Stp, Stn) incluídos nas outras fases dentre as respectivas fases são desligados usando um portador e o primeiro tempo de comutação; e uma seção de geração de sinal de controle (15) configurada para gerar os sinais de controle para ligar e desligar os elementos de comutação (Srp, Srn, Ssp, Ssn, Stp, Stn) usando o primeiro tempo de comutação (tempo de saída (T1, T2)) e o segundo tempo de comutação (tempo de saída Tz), em que o meio de controle (10) desliga um dos elementos de comutação em estado ligado de um entre o circuito de braço superior (Srp, Ssp, Stp) ou o circuito de braço inferior (Srn, Ssn, Stn) e mantém o estado ligado do outro entre os elementos de comutação em estado ligado do outro circuito de braço, em um caso onde um estado é transitado a partir do primeiro tempo de comutação ao segundo tempo de comutação.
2. Dispositivo de conversão de energia elétrica, de acordo com a reivindicação 1, CARACTERIZADO pelo fato de que o meio de controle (10) desliga um dos elementos de comutação (Srp, Srn, Ssp, Ssn, Stp, Stn) do circuito de braço superior e inferior foi mantido em um estado quando o estado é transitado a partir do primeiro tempo de comutação ao segundo tempo de comuta- ção, em um caso onde o estado é transitado a partir do primeiro tempo de comutação (tempo de saída (T1, T2)) ao segundo tempo de comutação (tempo de saída Tz) e, assim, o estado é transitado a partir do segundo tempo de comutação (tempo de saída Tz) ao primeiro tempo de comutação (tempo de saída (T1, T2)).
3. Dispositivo de conversão de energia elétrica, de acordo com a reivindicação 1 ou 2, CARACTERIZADO pelo fato de que o meio de controle (10) compreende, ainda: uma seção de transformação de coordenadas (11) configurada para realizar uma transformação de coordenadas giratórias para as tensões (Vr, Vs, Vt) detectadas por meio do meio de detecção de tensão (31, 32, 33); e uma tabela (14) que representa uma relação entre um ângulo de fase (θ) e um padrão de comutação dos elementos de comutação (Srp, Srn, Ssp, Ssn, Stp, Stn), a seção de cálculo de tempo de comutação (12, 13) calcula o primeiro tempo de comutação (tempo de saída (T1, T2)) em uma base da fase (θ) obtida a partir das tensões (Vα , Vβ) do sistema de coordenadas giratórias transformadas pela seção de transformação de coordenadas (11) e o valor de comando de saída, e a seção de geração de sinal de controle (15) gera os sinais de controle para ligar e desligar os elementos de comutação (Srp, Srn, Ssp, Ssn, Stp, Stn) através do padrão de comutação que se torna correspondente ao ângulo de fase (θ) das tensões (Vα , Vβ) do sistema de coordenadas giratórias.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011-194143 | 2011-09-06 | ||
| JP2011194143A JP5437334B2 (ja) | 2011-09-06 | 2011-09-06 | 電力変換装置 |
| PCT/JP2012/072730 WO2013035783A1 (ja) | 2011-09-06 | 2012-09-06 | 電力変換装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BR112014000991A2 BR112014000991A2 (pt) | 2017-02-21 |
| BR112014000991B1 true BR112014000991B1 (pt) | 2021-09-14 |
Family
ID=47832223
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112014000991-0A BR112014000991B1 (pt) | 2011-09-06 | 2012-09-06 | Dispositivo de conversão de energia elétrica |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US9203325B2 (pt) |
| EP (1) | EP2755311B1 (pt) |
| JP (1) | JP5437334B2 (pt) |
| KR (1) | KR101579390B1 (pt) |
| CN (1) | CN103748777B (pt) |
| BR (1) | BR112014000991B1 (pt) |
| MX (1) | MX2014000886A (pt) |
| RU (1) | RU2559042C1 (pt) |
| WO (1) | WO2013035783A1 (pt) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5377603B2 (ja) * | 2011-09-06 | 2013-12-25 | 日産自動車株式会社 | 電力変換装置 |
| JP5377604B2 (ja) * | 2011-09-06 | 2013-12-25 | 日産自動車株式会社 | 電力変換装置 |
| DE102012210648A1 (de) * | 2012-06-22 | 2013-12-24 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Ansteuern eines Wechselrichters |
| EP3248279B1 (en) * | 2015-03-25 | 2020-11-25 | Murata Manufacturing Co., Ltd. | Apparatus and method of fast commutation for matrix converter-based rectifier |
| WO2017038294A1 (ja) * | 2015-08-28 | 2017-03-09 | 株式会社村田製作所 | Dc-dcコンバータ |
| GB2557294B (en) | 2016-12-05 | 2022-03-30 | Itt Mfg Enterprises Llc | Matrix converter control method and system |
| CN106533200A (zh) * | 2017-01-11 | 2017-03-22 | 西南交通大学 | 交直流变换装置以及交直流变换系统 |
| WO2018183595A1 (en) * | 2017-03-31 | 2018-10-04 | Murata Manufacturing Co., Ltd. | Apparatus and method of operating matrix converter-based rectifier when one phase is disconnected or is short-circuited |
| JP6911689B2 (ja) * | 2017-10-06 | 2021-07-28 | トヨタ自動車株式会社 | 電源装置 |
Family Cites Families (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5519311A (en) | 1984-01-19 | 1996-05-21 | Don Widmayer & Associates, Inc. | Control of AC power to inductive loads |
| JP2676070B2 (ja) * | 1988-11-02 | 1997-11-12 | 日本電信電話株式会社 | 直流電源装置 |
| JPH077944A (ja) | 1993-06-17 | 1995-01-10 | Kobe Steel Ltd | 電力変換装置の制御方法 |
| JPH08107672A (ja) * | 1994-10-04 | 1996-04-23 | Sawafuji Electric Co Ltd | 三相/二相変換回路 |
| DE19634905A1 (de) * | 1996-08-29 | 1998-03-05 | Abb Patent Gmbh | Gleichrichterschaltung |
| JP3400283B2 (ja) * | 1997-02-27 | 2003-04-28 | 株式会社東芝 | 電力変換装置 |
| JP3509094B2 (ja) * | 1999-04-13 | 2004-03-22 | 株式会社安川電機 | 三相/単相pwmサイクロコンバータの制御装置 |
| US6330170B1 (en) | 1999-08-27 | 2001-12-11 | Virginia Tech Intellectual Properties, Inc. | Soft-switched quasi-single-stage (QSS) bi-directional inverter/charger |
| GB0006513D0 (en) * | 2000-03-18 | 2000-05-10 | Alstom | Improvements relating to converters |
| JP4374716B2 (ja) * | 2000-04-13 | 2009-12-02 | 富士電機システムズ株式会社 | 電力変換装置 |
| US6462974B1 (en) * | 2001-09-27 | 2002-10-08 | York International Corporation | Space vector modulation-based control method and apparatus for three-phase pulse width modulated AC voltage regulators |
| US6459606B1 (en) * | 2001-09-27 | 2002-10-01 | York International Corporation | Control system and method for four-quadrant switches in three-phase PWM AC voltage regulators |
| RU2265947C2 (ru) * | 2002-07-09 | 2005-12-10 | Новоуральский государственный технологический институт | Устройство и способ управления обратимым преобразователем энергии переменного тока в энергию переменного тока |
| JP4556108B2 (ja) | 2004-06-30 | 2010-10-06 | 富士電機ホールディングス株式会社 | 電力変換器の制御装置 |
| JP4683386B2 (ja) * | 2005-03-07 | 2011-05-18 | 国立大学法人長岡技術科学大学 | 絶縁形直接電力変換器の制御装置 |
| GB0506442D0 (en) * | 2005-03-30 | 2005-05-04 | Przybyla Jan | AC-DC converters |
| US7701740B2 (en) * | 2005-04-27 | 2010-04-20 | Kabushiki Kaisha Yaskawa Denki | Apparatus for three phase PWM cycloconverter |
| JP4029904B2 (ja) * | 2006-04-28 | 2008-01-09 | ダイキン工業株式会社 | マトリックスコンバータおよびマトリックスコンバータの制御方法 |
| EP2050185B1 (en) * | 2006-08-10 | 2020-12-23 | Eaton Intelligent Power Limited | A cyclo-converter and methods of operation |
| US8169179B2 (en) * | 2006-08-22 | 2012-05-01 | Regents Of The University Of Minnesota | Open-ended control circuit for electrical apparatus |
| EP2080262B1 (de) * | 2006-10-18 | 2010-03-17 | ABB Research LTD | Umrichterschaltung zur schaltung einer vielzahl von schaltspannungsniveaus |
| JP5263150B2 (ja) * | 2007-03-07 | 2013-08-14 | 株式会社安川電機 | 電力変換装置 |
| JP4957303B2 (ja) * | 2007-03-14 | 2012-06-20 | 株式会社明電舎 | 交流−交流直接変換装置の空間ベクトル変調方法 |
| RU2349019C1 (ru) | 2008-03-11 | 2009-03-10 | Федеральное государственное образовательное учреждение высшего профессионального образования "Кубанский государственный аграрный университет" | Трехфазный преобразователь частоты с естественной коммутацией |
| JP5304192B2 (ja) * | 2008-03-28 | 2013-10-02 | ダイキン工業株式会社 | 電力変換装置 |
| JP5586872B2 (ja) | 2009-05-07 | 2014-09-10 | 電気興業株式会社 | 三相単相直接電力変換器回路 |
| US8446743B2 (en) * | 2009-07-10 | 2013-05-21 | Regents Of The University Of Minnesota | Soft switching power electronic transformer |
| RU2414043C1 (ru) | 2010-03-26 | 2011-03-10 | Георгий Маркович Мустафа | Бестрансформаторный преобразователь частоты для регулируемого средневольтного электропривода |
| RU2422975C1 (ru) * | 2010-07-15 | 2011-06-27 | Федеральное государственное унитарное предприятие "Центральный научно-исследовательский институт судовой электротехники и технологии" | Устройство формирования и регулирования напряжения матричного непосредственного преобразователя частоты с высокочастотной синусоидальной шим |
| CN101951168B (zh) | 2010-09-16 | 2013-02-06 | 上海交通大学 | 高压转低压交流变换器 |
| JP5377604B2 (ja) * | 2011-09-06 | 2013-12-25 | 日産自動車株式会社 | 電力変換装置 |
| JP5377603B2 (ja) * | 2011-09-06 | 2013-12-25 | 日産自動車株式会社 | 電力変換装置 |
-
2011
- 2011-09-06 JP JP2011194143A patent/JP5437334B2/ja active Active
-
2012
- 2012-09-06 KR KR1020147004993A patent/KR101579390B1/ko active IP Right Grant
- 2012-09-06 MX MX2014000886A patent/MX2014000886A/es active IP Right Grant
- 2012-09-06 CN CN201280039812.6A patent/CN103748777B/zh active Active
- 2012-09-06 BR BR112014000991-0A patent/BR112014000991B1/pt active IP Right Grant
- 2012-09-06 WO PCT/JP2012/072730 patent/WO2013035783A1/ja active Application Filing
- 2012-09-06 RU RU2014113384/07A patent/RU2559042C1/ru active
- 2012-09-06 US US14/342,858 patent/US9203325B2/en active Active
- 2012-09-06 EP EP12829413.9A patent/EP2755311B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2755311A1 (en) | 2014-07-16 |
| CN103748777A (zh) | 2014-04-23 |
| WO2013035783A1 (ja) | 2013-03-14 |
| EP2755311B1 (en) | 2018-11-07 |
| JP2013055864A (ja) | 2013-03-21 |
| RU2559042C1 (ru) | 2015-08-10 |
| BR112014000991A2 (pt) | 2017-02-21 |
| KR101579390B1 (ko) | 2015-12-21 |
| JP5437334B2 (ja) | 2014-03-12 |
| CN103748777B (zh) | 2016-08-24 |
| EP2755311A4 (en) | 2015-10-07 |
| US20140233280A1 (en) | 2014-08-21 |
| KR20140042917A (ko) | 2014-04-07 |
| US9203325B2 (en) | 2015-12-01 |
| MX2014000886A (es) | 2014-02-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BR112014000991B1 (pt) | Dispositivo de conversão de energia elétrica | |
| BR112014001156B1 (pt) | Dispositivo de conversão de energia elétrica | |
| BR112014000990B1 (pt) | Dispositivo de conversão de energia elétrica | |
| BR112016009188B1 (pt) | dispositivos de fonte de alimentação de cc e de ciclo de refrigeração | |
| US10389269B2 (en) | Inverter apparatus including control circuit employing two-phase modulation control, and interconnection inverter system including the inverter apparatus | |
| JP2013055868A5 (pt) | ||
| JP2013055866A5 (pt) | ||
| JP2013055864A5 (pt) | ||
| US9991820B2 (en) | Multi-level converter and method of operating same | |
| WO2020030431A1 (en) | Converter system | |
| JP6107860B2 (ja) | インバータの制御装置 | |
| JP2010041877A (ja) | 電力変換装置の制御装置および制御方法 | |
| JPH0614590A (ja) | Pwmインバータ | |
| JP2016116315A (ja) | 電力変換装置の制御方法及び制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06F | Objections, documents and/or translations needed after an examination request according [chapter 6.6 patent gazette] | ||
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B06A | Patent application procedure suspended [chapter 6.1 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 06/09/2012, OBSERVADAS AS CONDICOES LEGAIS. |