WO2024252614A1 - 運転支援装置および運転支援方法 - Google Patents
運転支援装置および運転支援方法 Download PDFInfo
- Publication number
- WO2024252614A1 WO2024252614A1 PCT/JP2023/021342 JP2023021342W WO2024252614A1 WO 2024252614 A1 WO2024252614 A1 WO 2024252614A1 JP 2023021342 W JP2023021342 W JP 2023021342W WO 2024252614 A1 WO2024252614 A1 WO 2024252614A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- road
- illumination
- driving assistance
- vehicle
- assistance device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images



















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
- B60Q1/18—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights being additional front lights
Definitions
- This disclosure relates to a driving assistance device that assists in driving a vehicle.
- Patent Document 1 discloses a driving assistance device that improves visibility of the road surface on curved roads by adjusting the optical axis direction of the vehicle's headlights to match the shape of the road.
- This disclosure has been made to solve the above problems, and aims to provide a driving assistance device that can improve the driver's awareness of the road shape.
- the driving assistance device includes a road shape information acquisition unit that acquires information on the shape of the road on which the vehicle is traveling, a sidewall information acquisition unit that acquires information on whether or not a sidewall exists on the road, a brightness determination unit that determines whether or not the brightness around the vehicle is bright enough to require the implementation of assistance illumination, which is the illumination of light that encourages the driver of the vehicle to recognize the shape of the road, a support illumination determination unit that determines whether or not assistance illumination is to be implemented based on the determination results of the presence or absence of a sidewall on the road, the shape of the road, and the brightness around the vehicle, and a support illumination control unit that controls the lighting devices of the vehicle to implement assistance illumination when it is determined that assistance illumination is to be implemented.
- assistance illumination which is the illumination of light that encourages the driver of the vehicle to recognize the shape of the road
- a support illumination determination unit that determines whether or not assistance illumination is to be implemented based on the determination results of the presence or absence of a sidewall on the road, the shape of the road
- the support illumination determination unit determines that assistance illumination is to be implemented, and the support illumination control unit implements assistance illumination by irradiating at least a portion of the light onto the sidewall of the road.
- This disclosure can improve the driver's awareness of the road shape.
- FIG. 13 is a diagram showing an example of assisted irradiation.
- FIG. 13 is a diagram showing an example of assisted irradiation.
- FIG. 13 is a diagram showing an example of assisted irradiation.
- FIG. 13 is a diagram showing an example of assisted irradiation.
- 4 is a flowchart showing an operation of the driving assistance device according to the first embodiment.
- FIG. 13 is a diagram showing an example of assisted irradiation.
- FIG. 13 is a diagram showing an example of assisted irradiation.
- FIG. 13 is a diagram showing an example of assisted irradiation.
- FIG. 13 is a diagram showing an example of assisted irradiation.
- FIG. 13 is a diagram showing an example of assisted irradiation.
- FIG. 13 is a diagram showing an example of assisted irradiation.
- FIG. 13 is a diagram showing an example of assisted irradiation.
- FIG. 13 is a diagram showing an example of
- FIG. 13 is a diagram showing an example of assisted irradiation.
- FIG. 13 is a diagram showing an example of assisted irradiation.
- FIG. 13 is a diagram showing an example of assisted irradiation.
- FIG. 13 is a diagram showing an example of assisted irradiation.
- FIG. 11 is a diagram showing a configuration of a vehicle system according to a second embodiment.
- 10 is a flowchart showing the operation of the driving assistance device according to the second embodiment.
- 13 is a flowchart showing the operation of the driving assistance device according to the third embodiment.
- FIG. 2 is a diagram illustrating an example of a hardware configuration of a driving support device.
- FIG. 2 is a diagram illustrating an example of a hardware configuration of a driving support device.
- First embodiment> 1 is a diagram showing a configuration of a driving assistance device 10 according to the first embodiment.
- the driving assistance device 10 is incorporated into a vehicle system 1.
- a vehicle 100 equipped with the vehicle system 1 incorporating the driving assistance device 10 will be referred to as a "host vehicle.”
- the driving assistance device 10 is connected to the lighting device 20, map database 31, positioning device 32, and surroundings detection device 33 of the vehicle system 1.
- the lighting device 20 includes a headlight 21 and a sublight 22.
- the headlight 21 is a general lamp that emits light to ensure visibility ahead of the vehicle 100 at night or when driving through a tunnel.
- the sublight 22 is a lamp for providing support illumination, which is illumination of light to assist the driver of the vehicle 100 in driving, and is capable of controlling the direction and manner of illumination of the light. Note that if the headlight 21 is capable of controlling the direction and manner of illumination of light, the headlight 21 may be used for support illumination.
- Map database 31 is a database in which map data is stored.
- the map data stored in map database 31 needs to include at least information on the location and shape of roads, but may also include information on the presence or absence of side walls on the roads.
- the positioning device 32 is a device that measures the position of the vehicle 100 based on positioning signals received from GNSS (Global Navigation Satellite System) satellites.
- GNSS Global Navigation Satellite System
- the surrounding detection device 33 is a device that detects information about the surrounding environment of the vehicle 100, and is composed of, for example, LiDAR (Light Detection And Ranging), millimeter wave radar, an on-board camera, etc.
- LiDAR Light Detection And Ranging
- millimeter wave radar an on-board camera, etc.
- the driving assistance device 10 performs assistance illumination by controlling the lighting device 20 based on information acquired from the lighting device 20, the map database 31, the positioning device 32, and the surroundings detection device 33.
- assistance illumination is illumination of light to encourage the driver of the vehicle 100 to recognize the shape of the road, and is performed by illuminating at least a portion of the light onto the side wall of the road.
- the driving assistance device 10 includes a road shape information acquisition unit 11, a sidewall information acquisition unit 12, a brightness determination unit 13, an assistance illumination determination unit 14, and an assistance illumination control unit 15.
- the road shape information acquisition unit 11 compares the position of the vehicle 100 measured by the positioning device 32 with the map data in the map database 31 to identify the road on which the vehicle 100 is traveling, and acquires information on the shape of the road on which the vehicle 100 is traveling by reading information on the shape of the road (e.g., radius of curvature, gradient, etc.) from the map database 31.
- the road shape information acquisition unit 11 acquires at least information on the road shape ahead of the vehicle 100.
- the means by which the road shape information acquisition unit 11 acquires road shape information is not limited to the map database 31.
- the road shape information acquisition unit 11 may acquire information on the road shape ahead of the vehicle 100 detected by the periphery detection device 33.
- the sidewall information acquisition unit 12 acquires information on the surrounding environment of the vehicle 100 (hereinafter referred to as "surrounding information") from the surrounding information, and acquires information on whether or not a sidewall exists on the road on which the vehicle 100 is traveling from the surrounding information.
- the sidewall information acquisition unit 12 acquires at least information on the presence or absence of a sidewall on the road ahead of the vehicle 100.
- the means by which the sidewall information acquisition unit 12 acquires information on the presence or absence of a sidewall is not limited to the surrounding detection device 33. For example, if the map data in the map database 31 includes information on the sidewalls of the road, the sidewall information acquisition unit 12 may acquire information on the presence or absence of a sidewall on the road on which the vehicle 100 is traveling from the map database 31.
- the brightness determination unit 13 determines whether the brightness around the vehicle 100 is such that support illumination (i.e., illumination of light that encourages the driver of the vehicle 100 to recognize the shape of the road) is necessary. In this embodiment, the brightness determination unit 13 performs this brightness determination based on the usage status of the headlights 21. Specifically, if the headlights 21 are on, it determines that the surroundings of the vehicle 100 are dark and the brightness is such that support illumination is necessary, and if the headlights 21 are off, it determines that the surroundings of the vehicle 100 are bright and the brightness is such that support illumination is unnecessary. The method of determining brightness is not limited to this method.
- the brightness determination unit 13 may determine whether the brightness around the vehicle 100 is such that support illumination is necessary based on the usage status of the small lamps and fog lamps, the brightness around the vehicle 100 measured by an illuminometer, the brightness of an image of the surroundings of the vehicle 100 captured by an in-vehicle camera, and the like.
- the support illumination determination unit 14 determines whether or not to perform support illumination based on the presence or absence of side walls on the road on which the vehicle 100 is traveling, the shape of the road, and the determination result of the brightness around the vehicle 100. Specifically, the support illumination determination unit 14 determines to perform support illumination when a side wall is present on the road on which the vehicle 100 is traveling, the road is curved in the horizontal or vertical direction, and the brightness around the vehicle 100 is determined to be sufficient to require the implementation of support illumination. Any method may be used to determine whether or not the road is curved. For example, one method of determining whether or not the road is curved in the horizontal direction is to determine whether or not the radius of curvature of the road is less than 100 m. For example, one method of determining whether or not the road is curved in the vertical direction is to determine whether or not the change in gradient of the road is 1% or more.
- Both horizontal and vertical curvatures may be taken into account when determining whether a road is curved.
- Roads with a radius of curvature of 100m or more, or roads with a gradient change of 0.5% to less than 1% are determined to be not curved using the above determination method.
- the road may be determined to be curved.
- whether a road is curved may be determined using an evaluation function in which the radius of curvature and gradient change of the road are each weighted.
- the traveling speed of the vehicle 100 may also be taken into consideration when determining whether the road is curved. As the traveling speed of the vehicle 100 increases, the effect of the curvature of the road becomes greater. Therefore, the faster the traveling speed of the vehicle 100, the greater the threshold value of the curvature radius for determining the lateral curvature of the road, and the smaller the threshold value of the gradient change for determining the vertical curvature of the road, so that it is easier to determine that the road is curved.
- the support illumination control unit 15 controls the lighting device 20 to perform support illumination.
- the support illumination control unit 15 controls the sublight 22 to perform support illumination, but as described above, the headlight 21 may be used for support illumination.
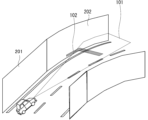
- assistance illumination As shown in FIG. 2, a situation is assumed in which the road on which the vehicle 100 is traveling changes from a straight road to a curved road (a road curved laterally), that is, the vehicle 100 enters the curved road from the straight road.
- the straight road has a straight side wall 201, which is a straight side wall
- the curved road has a curved side wall 202, which is a curved side wall along the curved road.
- the headlight 21 is in a turned-on state (FIG. 2 shows the headlight light 101 irradiated from the headlight 21), and the brightness determination unit 13 determines that the brightness around the vehicle 100 is such that the implementation of assistance illumination is required.
- FIG. 2 shows the situation in FIG.
- the support irradiation determination unit 14 determines that support irradiation should be performed, and the support irradiation control unit 15 performs support irradiation.
- FIG. 2 shows an example of assisted illumination in which a bar-shaped (horizontal bar-shaped) illumination pattern 102 extending perpendicularly to the traveling direction of the vehicle 100 is illuminated on the road surface ahead of the vehicle 100. A part of the illumination pattern 102 is illuminated on the curved side wall 202.
- the direction in which the illumination pattern 102 extends on the road surface is horizontal to the road surface, but the direction in which the illumination pattern 102 extends on the curved side wall 202 appears to be inclined with respect to the road surface. Therefore, the driver of the vehicle 100 can recognize the presence of the curved side wall 202 from the position of the illumination pattern 102 that appears to be inclined.
- the illumination position of the illumination pattern 102 may be a fixed distance (e.g., 30 m) ahead of the vehicle 100. If the illumination position of the illumination pattern 102 is set to a fixed distance from the vehicle 100, the control of the illumination position by the driving assistance device 105 can be simplified.
- the irradiation pattern 102 irradiated to the straight sidewall 201 and the irradiation pattern 102 irradiated to the curved sidewall 202 may have different irradiation modes. In this case, it is preferable that the irradiation pattern 102 irradiated to the curved sidewall 202 is more noticeable (higher visibility) than the irradiation pattern 102 irradiated to the straight sidewall 201.
- the width of the irradiation pattern 102 irradiated to the curved sidewall 202 may be made wider than the width of the irradiation pattern 102 irradiated to the straight sidewall 201, the interval between the irradiation patterns 102 irradiated to the curved sidewall 202 may be made narrower than the interval between the irradiation patterns 102 irradiated to the straight sidewall 201, the color tone of the irradiation pattern 102 irradiated to the curved sidewall 202 may be made brighter than the color tone of the irradiation pattern 102 irradiated to the straight sidewall 201, etc. are conceivable.
- the irradiation mode may be different between the portion that is irradiated onto the road surface and the portion that is irradiated onto the side wall.
- the color tone or thickness may be different between the portion of the irradiation pattern 102 that is irradiated onto the road surface and the portion that is irradiated onto the side wall. This makes it easier to distinguish between the portion of the irradiation pattern 102 that is irradiated onto the road surface and the portion that is irradiated onto the side wall, making it even easier for the driver of the vehicle 100 to recognize the presence of the curved side wall 202.
- the width of the bar-shaped irradiation pattern 102 may be set to a width that reaches the very edge of the side wall when the road is straight. In that case, the irradiation pattern 102 reaches the curved side wall 202 but does not reach the straight side wall 201. Therefore, the driver can distinguish between the straight side wall 201 and the curved side wall 202 based on the presence or absence of the irradiation pattern 102, which appears to be tilted. However, since it is difficult for an irradiation pattern 102 that does not reach the straight side wall 201 to show a situation in which a straight road is curved vertically, it can be said that the irradiation pattern 102 is specialized for showing the lateral curvature of the road.
- the irradiation pattern 102 may not be a solid line (continuous line) pattern, but may be a dashed or dotted line pattern.
- the bar-shaped irradiation pattern 102 may be a pattern that is irradiated onto the side walls and their vicinity, but not onto the center of the road.
- the irradiation pattern 102 may be a line (vertical bar) extending along the traveling direction of the vehicle 100.
- FIG. 4 shows an example of assisted irradiation in which a single line-shaped irradiation pattern 102 extending along the traveling direction of the vehicle 100 is irradiated onto the road surface ahead of the vehicle 100.
- the irradiation pattern 102 may be a pattern that combines a bar-shaped pattern and a line-shaped pattern.
- FIG. 5 shows an example of assisted irradiation in which a cross-shaped irradiation pattern 102 that combines one bar-shaped pattern and one line-shaped pattern is irradiated onto the road surface ahead of the vehicle 100.
- the irradiation pattern 102 may also be a pattern that combines one line-shaped pattern and multiple bar-shaped patterns that intersect with it.
- the irradiation pattern 102 that combines a bar-shaped pattern and a line-shaped pattern is effective on spiral roads with long curves, such as highway interchanges.
- the driving assistance device 10 can encourage the driver to recognize the shape of the curved road by illuminating the sidewall of the road with assistance illumination light. This can improve the driver's awareness of the road shape. As a result, the risk of the vehicle 100 colliding with the sidewall can be reduced, contributing to safe driving.
- FIG. 6 is a flowchart showing the operation of the driving assistance device 10 according to the first embodiment. The operation of the driving assistance device 10 will be explained below with reference to the flowchart in FIG. 6.
- the brightness determination unit 13 determines whether the brightness around the vehicle 100 is sufficient to require the implementation of assistance illumination based on the usage status of the headlights 21 (step S101).
- the road shape information acquisition unit 11 compares the position of the vehicle 100 measured by the positioning device 32 with the map data in the map database 31 to identify the road on which the vehicle 100 is traveling, and acquires information on the shape of the road on which the vehicle 100 is traveling from the map database 31 (step S102).
- the sidewall information acquisition unit 12 acquires information from the surroundings detection device 33 as to whether or not a sidewall exists on the road on which the vehicle 100 is traveling (step S103).
- the support illumination judgment unit 14 judges whether the conditions for performing support illumination (support illumination implementation conditions) are met based on the information acquired in steps S101 to S103 (step S104). Specifically, the support illumination judgment unit 14 judges to perform support illumination when a sidewall is present on the road on which the vehicle 100 is traveling, the road is curved in the horizontal or vertical direction, and the brightness around the vehicle 100 is judged to be sufficient to require the implementation of support illumination.
- step S104 If the conditions for implementing support irradiation are met (YES in step S104), the support irradiation control unit 15 controls the sublight 22 to execute support irradiation (step S105). If the conditions for implementing support irradiation are not met (NO in step S104), support irradiation is not executed.
- step S106 the driving assistance device 10 checks whether the driving of the vehicle 100 has ended. If the driving of the vehicle 100 continues (NO in step S106), the process returns to step S101, and if the driving of the vehicle 100 has ended (YES in step S106), the operation of the driving assistance device 10 ends.
- the assistance illumination may be performed by illuminating a fan-shaped light that spreads in the horizontal direction but not in the vertical direction in the horizontal direction (a certain height direction).
- the illumination pattern 102 is not illuminated on the road surface, and a linear illumination pattern 102 extending in the horizontal direction is illuminated on the curved side wall 202.
- the illumination pattern 102 is illuminated on the road surface as shown in Figs. 2 to 5
- the illumination pattern 102 is not illuminated on the road surface, the effect of making the driver recognize the boundary between the road surface and the side wall of the road is reduced.
- the assistance illumination may be performed by illuminating a plurality of illumination patterns 102 onto the sidewall.
- Fig. 9 shows an example in which the illumination pattern 102 is an arrow-shaped pattern
- Fig. 10 shows an example in which the illumination pattern 102 is an L-shaped pattern
- Fig. 11 shows an example in which the illumination pattern 102 is a disk-shaped pattern.
- These illumination patterns 102 imitate road structures (e.g., reflectors and LED lighting installed on the sidewall) that promote recognition of the road shape, and are compatible with the sidewall, making it possible to prevent the illumination pattern 102 from giving a sense of discomfort to the driver of the vehicle 100.
- the irradiation pattern 102 may be provided with an animation effect that changes over time, such as blinking, changing color, or changing position.
- the irradiation pattern 102 may also be a single dot-like pattern. It is preferable that the animation effect of the irradiation pattern 102 be provided when the curvature of the road is small.
- the form of the irradiation pattern 102 may be changed according to the shape of the road on which the vehicle 100 is traveling. For example, the greater the curvature of the road, the more noticeable the irradiation pattern 102 may be. Specifically, the greater the curvature of the road, the wider the width of the bar-shaped irradiation pattern 102 may be, the more bars there are, or the higher the density may be.
- FIGS. 12 to 15 are examples of support illumination suitable for indicating that a road is curved vertically.
- multiple arrow-shaped illumination patterns 102 aligned along an upward convex curve may be illuminated onto the sidewall, as in FIGS. 12 and 13.
- multiple arrow-shaped illumination patterns 102 aligned along an upward convex curve may be illuminated onto the sidewall.
- multiple downward arrow-shaped irradiation patterns 102 may be projected onto the sidewall, as shown in Figures 14 and 15.
- multiple upward arrow-shaped irradiation patterns 102 may be projected onto the sidewall.
- the multiple arrow-shaped irradiation patterns 102 may be projected at a position at a certain height above the road surface.
- the irradiation position and manner of the irradiation pattern 102 may be changed according to the traveling speed of the vehicle 100.
- the irradiation position of the irradiation pattern 102 may be controlled so that the irradiation pattern 102 is irradiated at a position where the vehicle 100 will arrive in 3 seconds.
- the manner of the irradiation pattern 102 may be controlled so that the irradiation pattern 102 becomes more noticeable as the traveling speed of the vehicle 100 increases.
- the irradiation position and manner of the irradiation pattern 102 may be changed taking into consideration both the shape of the road on which the vehicle 100 is traveling and the traveling speed of the vehicle 100.
- Fig. 16 is a diagram showing a configuration of a vehicle system 1 according to embodiment 2.
- the configuration of the vehicle system 1 in Fig. 16 is obtained by connecting an image recognition device 34 to the driving assistance device 10 and adding a recognition degree estimation unit 16 in the driving assistance device 10, in addition to the configuration in Fig. 1.
- the image recognition device 34 analyzes images of the surroundings of the driving assistance device 10 captured by an onboard camera (not shown) of the vehicle 100, and recognizes the color tone (e.g., hue, saturation, brightness, etc.) of the road and side walls on which the vehicle 100 is traveling.
- the color tone e.g., hue, saturation, brightness, etc.
- the awareness estimation unit 16 acquires information on the color tone of the sidewalls and road surface of the road on which the vehicle 100 is traveling from the image recognition device 34, and estimates the driver's awareness of the road shape based on the difference in color tone between the sidewalls and the road surface. Normally, when the difference in color tone between the sidewalls and the road surface is small, it is difficult for the driver to recognize the road shape. Therefore, the awareness estimation unit 16 estimates that the driver's awareness of the road shape is low when the difference in color tone between the sidewalls and the road surface is small, and estimates that the driver's awareness of the road shape is high when the difference in color tone between the sidewalls and the road surface is large.
- the support illumination control unit 15 determines not to perform support illumination when the driver's awareness of the road shape estimated by the awareness estimation unit 16 is equal to or greater than a predetermined threshold.
- D ⁇
- /L (r L2 ⁇ L3)
- r is the distance from the vehicle 100
- Cdri(r) is the color tone of the road surface at the distance r
- Cdwi(r) is the color tone of the sidewall at the distance r.
- the range in which the average color tone difference is calculated may be wider than the range from 2 seconds to 3 seconds later.
- the color tone difference may be calculated in a range wider than the range from 2 seconds to 3 seconds later, and a weighted average in which the weight of the color tone difference in the range from 2 seconds to 3 seconds later is increased may be calculated as the color tone difference between the sidewall and the road surface.
- the color tone parameters used to calculate the color tone difference may be one or more of the following: hue, saturation, and brightness, or other parameters.
- the color tone difference may be calculated from the contrast value between the road surface and the sidewall in an image of the surroundings of the vehicle 100.
- FIG. 17 is a flowchart showing the operation of the driving assistance device 10 according to the second embodiment.
- the flowchart in FIG. 17 is similar to that in FIG. 6, except that steps S201 and S202 are added between steps S104 and S105.
- Step S201 is performed when it is determined in step S104 that the conditions for performing support irradiation (support irradiation implementation conditions) are met (YES in step S104).
- the awareness estimation unit 16 calculates the difference in color tone between the sidewalls and the road surface from the information on the color tone of the sidewalls and the road surface of the road on which the vehicle 100 is traveling, obtained from the image recognition device 34, and estimates the driver's awareness of the road shape.
- Step S202 is performed after step S201.
- the support irradiation judgment unit 14 checks whether the degree of recognition estimated in step S201 is less than a predetermined threshold. If the degree of recognition is less than the threshold (YES in step S202), the support irradiation judgment unit 14 judges that support irradiation should be performed, and support irradiation is performed in step S105. However, if the degree of recognition is equal to or greater than the threshold (NO in step S202), the support irradiation judgment unit 14 judges that support irradiation is not necessary, and the process proceeds to step S106 without performing support irradiation.
- the driving assistance device 10 does not perform unnecessary assistance illumination when the driver is highly aware of the road shape, which prevents the driver from feeling annoyed by the assistance illumination and contributes to reducing power consumption.
- the dividing lines on the road are one of the means by which the driver recognizes the road shape. Therefore, the recognition estimation unit 16 may estimate the driver's recognition of the road shape based on the color difference between the road and the dividing lines.
- the color difference between the road and the dividing lines can be calculated, for example, by analyzing an image of the surroundings of the vehicle 100 captured by an on-board camera.
- the recognition estimation unit 16 may estimate the driver's recognition of the road shape based on the brightness around the vehicle 100.
- the brightness of the surroundings may be calculated, for example, by analyzing an image of the surroundings of the vehicle 100 captured by an on-board camera, or may be measured using a light meter.
- the recognition level estimation unit 16 may estimate the driver's recognition of the road shape based on the presence or absence of road structures.
- the presence or absence of road structures can be determined, for example, by analyzing images of the surroundings of the vehicle 100 captured by an on-board camera.
- the awareness estimation unit 16 may estimate the driver's awareness of the road shape from the driver's visual ability.
- the awareness estimation unit 16 may estimate the driver's visual ability by any method.
- the awareness estimation unit 16 may use a driver monitoring system (DMS) to monitor the operation status of the vehicle 100 by the driver, and may estimate that the driver's visual ability is low if there is a high frequency of erroneous operation or sudden driving operation (sudden steering, sudden braking, etc.).
- the awareness estimation unit 16 may also use the DMS to detect the driver's psychological or physiological state, and may estimate that the driver's actual visual ability is reduced if the driver is highly fatigued, has a low level of alertness, or is looking around without focusing.
- the driver may also be able to input information indicating his or her own qualifications (for example, eyesight, the presence or absence of cataracts, etc.) to the awareness estimation unit 16 in advance.
- the awareness estimation unit 16 may combine two or more of the above methods to estimate the driver's awareness of the road shape.
- the assistance illumination control unit 15 changes the mode of assistance illumination according to the driver's awareness of the road shape estimated by the awareness estimation unit 16. Specifically, the assistance illumination control unit 15 performs assistance illumination in a more conspicuous mode (highly visible mode) as the driver's awareness of the road shape is lower.
- FIG. 18 is a flowchart showing the operation of the driving assistance device 10 according to the third embodiment.
- the flowchart in FIG. 18 is similar to that in FIG. 17, except that step S105 is replaced with steps S301 and S302.
- Step S301 is performed when it is determined in step S202 that the driver's awareness of the road shape is equal to or greater than the threshold (NO in step S202).
- the support illumination control unit 15 provides support illumination in a first manner, which is a modest manner (a manner with low visibility). This prevents the driver from feeling annoyed by the support illumination.
- Step S302 is performed when it is determined in step S202 that the driver's awareness of the road shape is below the threshold (YES in step S202).
- the support illumination control unit 15 provides support illumination in the second manner, which is a conspicuous manner. This effectively improves the driver's awareness of the road shape.
- the size of the irradiation pattern in the assisted irradiation of the second aspect may be made larger than the size of the irradiation pattern in the assisted irradiation of the first aspect, and the color tone of the irradiation pattern in the assisted irradiation of the second aspect may be made brighter than the color tone of the irradiation pattern in the assisted irradiation of the second aspect.
- the driving assistance device 10 according to the third embodiment can provide appropriate assistance illumination according to the driver's awareness of the road shape.
- the support illumination control unit 15 switches between two types of support illumination depending on the driver's recognition of the road shape, but the recognition may be subdivided by setting two or more thresholds of the recognition, and the support illumination control unit 15 may switch between three or more types of support illumination depending on the level of the recognition. Alternatively, the support illumination control unit 15 may change the mode of the support illumination continuously or in multiple stages depending on the level of the recognition.
- support illumination with an animation effect may be implemented. Also, the lower the awareness, the greater the speed or amount of change in the animation may be.
- the size of the illumination pattern may be continuously changed, or the amount of change in the animation may be continuously changed.
- ⁇ Hardware configuration example> 19 and 20 are diagrams showing examples of the hardware configuration of the driving support device 10.
- the functions of the components of the driving support device 10 shown in FIG. 1 are realized, for example, by a processing circuit 50 shown in FIG. 19. That is, the driving support device 10 acquires information on the shape of the road on which the vehicle 100 is traveling, acquires information on whether or not a side wall exists on the road, determines whether or not the brightness around the vehicle 100 is bright enough to require the implementation of support illumination, which is illumination of light that encourages the driver of the vehicle 100 to recognize the shape of the road, and determines whether or not support illumination is to be implemented based on the determination results of the presence or absence of a side wall of the road, the shape of the road, and the brightness around the vehicle 100, and when it is determined that support illumination is to be implemented, the processing circuit 50 controls the lighting device 20 of the vehicle 100 to implement support illumination.
- the processing circuit 50 determines that support illumination is to be implemented, and implements support illumination by irradiating at least a part of the light onto the side wall of the road.
- the processing circuit 50 may be dedicated hardware, or may be configured using a processor (also called a central processing unit (CPU), processing unit, arithmetic unit, microprocessor, microcomputer, or DSP (Digital Signal Processor)) that executes programs stored in memory.
- a processor also called a central processing unit (CPU), processing unit, arithmetic unit, microprocessor, microcomputer, or DSP (Digital Signal Processor)
- CPU central processing unit
- microprocessor microcomputer
- DSP Digital Signal Processor
- the processing circuit 50 may be, for example, a single circuit, a composite circuit, a programmed processor, a parallel programmed processor, an ASIC (Application Specific Integrated Circuit), an FPGA (Field-Programmable Gate Array), or a combination of these.
- Each function of the components of the driving assistance device 10 may be realized by a separate processing circuit, or these functions may be realized together by a single processing circuit.
- Figure 20 shows an example of the hardware configuration of the driving assistance device 10 when the processing circuit 50 is configured using a processor 51 that executes a program.
- the functions of the components of the driving assistance device 10 are realized by software, etc. (software, firmware, or a combination of software and firmware).
- the software, etc. is written as a program and stored in memory 52.
- the processor 51 realizes the functions of each part by reading and executing the program stored in memory 52.
- the driving assistance device 10 includes a memory 52 for storing a program that, when executed by the processor 51, results in the execution of the following: a process for acquiring information on the shape of the road on which the vehicle 100 is traveling, a process for acquiring information on whether or not a sidewall exists on the road, a process for determining whether or not the brightness around the vehicle 100 is bright enough to require the execution of assistance illumination, which is illumination of light that encourages the driver of the vehicle 100 to recognize the shape of the road, a process for determining whether or not assistance illumination is to be performed based on the determination results of the presence or absence of a sidewall on the road, the shape of the road, and the brightness around the vehicle 100, and a process for controlling the lighting device 20 of the vehicle 100 to perform assistance illumination when it is determined that assistance illumination is to be performed.
- the processor 51 that executes the program determines to perform assistance illumination when it is determined that a sidewall exists on the road, the road is curved in the horizontal or vertical direction, and the brightness around the vehicle 100 is bright enough to require the execution of assistance illumination, and performs assistance illumination by irradiating at least a part of light onto the sidewall of the road.
- this program causes the computer to execute procedures and methods for the operation of the components of the driving assistance device 10.
- memory 52 may be, for example, non-volatile or volatile semiconductor memory such as RAM (Random Access Memory), ROM (Read Only Memory), flash memory, EPROM (Erasable Programmable Read Only Memory), EEPROM (Electrically Erasable Programmable Read Only Memory), HDD (Hard Disk Drive), magnetic disk, flexible disk, optical disk, compact disk, mini disk, DVD (Digital Versatile Disc) and their drive devices, or any other storage medium that will be used in the future.
- RAM Random Access Memory
- ROM Read Only Memory
- flash memory EPROM (Erasable Programmable Read Only Memory), EEPROM (Electrically Erasable Programmable Read Only Memory), HDD (Hard Disk Drive), magnetic disk, flexible disk, optical disk, compact disk, mini disk, DVD (Digital Versatile Disc) and their drive devices, or any other storage medium that will be used in the future.
- EPROM Erasable Programmable Read Only Memory
- EEPROM Electrically Erasable Programmable Read Only Memory
- HDD Hard Disk Drive
- the above describes a configuration in which the functions of the components of the driving assistance device 10 are realized either by hardware or software, etc.
- this is not limited to the above, and the configuration may be such that some of the components of the driving assistance device 10 are realized by dedicated hardware, and other components are realized by software, etc.
- the functions of some components may be realized by the processing circuit 50 as dedicated hardware, and for other components, the functions to be realized by the processing circuit 50 as the processor 51 reading and executing a program stored in the memory 52.
- the driving assistance device 10 can realize each of the above-mentioned functions through hardware, software, etc., or a combination of these.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Traffic Control Systems (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2025525859A JP7721043B2 (ja) | 2023-06-08 | 2023-06-08 | 運転支援装置および運転支援方法 |
| PCT/JP2023/021342 WO2024252614A1 (ja) | 2023-06-08 | 2023-06-08 | 運転支援装置および運転支援方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2023/021342 WO2024252614A1 (ja) | 2023-06-08 | 2023-06-08 | 運転支援装置および運転支援方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024252614A1 true WO2024252614A1 (ja) | 2024-12-12 |
Family
ID=93795709
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/021342 Ceased WO2024252614A1 (ja) | 2023-06-08 | 2023-06-08 | 運転支援装置および運転支援方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7721043B2 (https=) |
| WO (1) | WO2024252614A1 (https=) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005059839A (ja) * | 2003-07-28 | 2005-03-10 | Denso Corp | 車両用前照灯装置 |
| JP2018020683A (ja) * | 2016-08-04 | 2018-02-08 | トヨタ自動車株式会社 | 車両用照明装置 |
| WO2022254570A1 (ja) * | 2021-06-01 | 2022-12-08 | 三菱電機株式会社 | 投射制御装置および投射制御方法 |
-
2023
- 2023-06-08 JP JP2025525859A patent/JP7721043B2/ja active Active
- 2023-06-08 WO PCT/JP2023/021342 patent/WO2024252614A1/ja not_active Ceased
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005059839A (ja) * | 2003-07-28 | 2005-03-10 | Denso Corp | 車両用前照灯装置 |
| JP2018020683A (ja) * | 2016-08-04 | 2018-02-08 | トヨタ自動車株式会社 | 車両用照明装置 |
| WO2022254570A1 (ja) * | 2021-06-01 | 2022-12-08 | 三菱電機株式会社 | 投射制御装置および投射制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7721043B2 (ja) | 2025-08-08 |
| JPWO2024252614A1 (https=) | 2024-12-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3865574B2 (ja) | 車両用前照灯システム | |
| JP4730267B2 (ja) | 車両用視界状況判定装置 | |
| US9250063B2 (en) | Method and device for ascertaining a position of an object in the surroundings of a vehicle | |
| US9168861B2 (en) | Method for controlling a headlamp system for a vehicle, and headlamp system | |
| EP2594431B1 (en) | Apparatus and method for controlling a headlamp of vehicle | |
| JP6929481B1 (ja) | 配光制御装置、配光制御方法及び配光制御プログラム | |
| JP5980899B2 (ja) | 車両用の照明システムのヘッドライトレンジを距離に応じて調整するための方法、制御装置、およびコンピュータ読み取り可能な記録媒体 | |
| JP2002040139A (ja) | 物体認識方法及び装置、記録媒体 | |
| JP2002052975A (ja) | 車両用前照灯システム | |
| CN102673560A (zh) | 识别拐弯机动的方法和驾驶员辅助系统 | |
| JPWO2020008560A1 (ja) | 情報表示装置及び情報表示方法 | |
| EP3763578A1 (en) | Vehicle-mounted equipment control device | |
| JP2009029227A (ja) | 照明制御装置および方法、並びに、プログラム | |
| JP2021088233A (ja) | 車両用投光制御装置、車両用投光システム、及び車両用投光制御方法 | |
| JP2000293782A (ja) | 自動走行制御装置 | |
| JP7466774B2 (ja) | 投射制御装置および投射制御方法 | |
| CN110316187B (zh) | 汽车及其避障控制方法 | |
| JP7378673B2 (ja) | 前照灯制御装置、前照灯制御システム、及び前照灯制御方法 | |
| JP7721043B2 (ja) | 運転支援装置および運転支援方法 | |
| JP5531919B2 (ja) | 前照灯制御装置 | |
| JP2000168437A (ja) | 車両用照明装置 | |
| JP2012196999A (ja) | 車両用照明装置及び方法 | |
| JP2002225618A (ja) | 車両用前照灯システム | |
| JP2006268414A (ja) | 運転支援装置 | |
| JP2000020897A (ja) | 通行区分逸脱警報装置、通行区分逸脱警報方法及びそのプログラムを記録した記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23940713 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2025525859 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |