WO2024116465A1 - 情報伝達装置 - Google Patents
情報伝達装置 Download PDFInfo
- Publication number
- WO2024116465A1 WO2024116465A1 PCT/JP2023/027929 JP2023027929W WO2024116465A1 WO 2024116465 A1 WO2024116465 A1 WO 2024116465A1 JP 2023027929 W JP2023027929 W JP 2023027929W WO 2024116465 A1 WO2024116465 A1 WO 2024116465A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- steering
- vehicle
- information transmission
- transmission device
- gain
- Prior art date
Links
- 230000005540 biological transmission Effects 0.000 title claims abstract description 36
- 230000005284 excitation Effects 0.000 claims abstract description 31
- 238000001514 detection method Methods 0.000 claims abstract description 3
- 230000002596 correlated effect Effects 0.000 claims description 8
- 230000007423 decrease Effects 0.000 claims description 3
- 238000010586 diagram Methods 0.000 description 22
- 230000001133 acceleration Effects 0.000 description 10
- 210000003607 pacinian corpuscle Anatomy 0.000 description 9
- 230000004044 response Effects 0.000 description 6
- 230000035945 sensitivity Effects 0.000 description 6
- 210000000412 mechanoreceptor Anatomy 0.000 description 5
- 102000005962 receptors Human genes 0.000 description 5
- 108020003175 receptors Proteins 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 230000000875 corresponding effect Effects 0.000 description 4
- 210000005069 ears Anatomy 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 230000033001 locomotion Effects 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 230000035807 sensation Effects 0.000 description 4
- 210000000716 merkel cell Anatomy 0.000 description 3
- 210000001217 buttock Anatomy 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000010365 information processing Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000013707 sensory perception of sound Effects 0.000 description 2
- 210000003491 skin Anatomy 0.000 description 2
- 210000000689 upper leg Anatomy 0.000 description 2
- 238000004378 air conditioning Methods 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000004069 differentiation Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 229920001971 elastomer Polymers 0.000 description 1
- 239000000806 elastomer Substances 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 210000002265 sensory receptor cell Anatomy 0.000 description 1
- 102000027509 sensory receptors Human genes 0.000 description 1
- 108091008691 sensory receptors Proteins 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
Definitions
- the present invention relates to an information transmission device that transmits information about the vehicle's behavior to vehicle occupants.
- Patent Document 1 describes a driving assistance device that provides an easily recognizable steering angle and steering direction, in which the amount of steering of the steering wheel is indicated by a sound that changes in conjunction with the amount of steering. Specifically, it describes controlling the tone so that the tone gets higher as the steering amount increases, and changing the volume, pitch, tone, sound pressure, frequency, position of the sound image, etc. of the sound to indicate the amount of steering of the steering wheel.
- Patent document 2 describes a music generation device for a vehicle that easily generates music that reflects the vehicle's behavior and the driver's operations, and includes a memory unit that stores a plurality of sound source loop patterns each corresponding to each piece of information based on the vehicle driver's operations or the vehicle's behavior, and a control unit that selects a specific sound source loop pattern from the plurality of sound source loop patterns in accordance with each piece of information and controls output or stop of output.
- an object of the present invention is to provide an information transmission device that improves the predictability of a vehicle occupant with respect to behavior caused by steering of the vehicle.
- an information transmission device is an information transmission device provided in a vehicle having a steering device for steering wheels, and is characterized in that it includes a parameter detection unit that detects a parameter correlated to the steering amount of the steering device, an excitation waveform generation unit that generates an excitation waveform, a vibration unit that vibrates the air around an occupant using the excitation waveform, and a gain adjustment unit that increases the output gain of the excitation waveform in accordance with an increase in the absolute value of the derivative value of the parameter.
- the sound can predict to the occupants the behavior that will occur at the beginning of steering, before the lateral acceleration, yaw rate, roll angle, etc. actually occur in the vehicle. This improves the occupant's predictability of vehicle behavior, and prevents the occupant from feeling abruptness due to the vehicle behavior.
- the excitation waveform may have a dominant frequency included in a frequency band of 100 to 400 Hz.
- a dominant frequency is set in the frequency band of 150 to 300 Hz, whereby the receptors in a region with better sensitivity can be used, and the above-mentioned effect can be promoted.
- the rate of increase of the output gain with respect to an increase in the absolute value of the derivative in the gain adjustment unit can be configured to be maximum in a region where the absolute value of the derivative is minute, and to decrease as the absolute value of the derivative increases.
- This makes it possible to set a large output gain even in a region where the absolute value of the differential value is relatively small, and makes it possible to properly convey information to the occupant even in the initial stage of steering when the steering angle and steering speed are small.
- the output gain can be set based on a logarithmic function of the absolute value of the derivative.
- the gain adjustment unit can be configured to set the output gain so that the sound pressure generated by the vibration of the vibration unit, at the ear of at least one occupant, does not dominate over background noise when the vehicle is running. This prevents the sound generated by the vibration of the vibration unit from being lost in the background noise of the vehicle and becoming unpleasant to the occupants, and also allows information to be transmitted appropriately.
- the parameters may include at least one of a steering angle of the steering device, an input torque to the steering device, an actuation amount of an actuator that steers the wheels, and an output command value to the actuator. According to this, the steering amount of the steering device can be appropriately grasped using parameters that can be easily detected in a typical vehicle.
- the present invention provides an information transmission device that improves the occupant's predictability of behavior caused by steering the vehicle.
- FIG. 1 is a diagram showing a schematic configuration of an electric power steering device for a vehicle having an embodiment of an information transmission device to which the present invention is applied; 1 is a diagram illustrating a system configuration of an information transmission device according to a first embodiment; FIG. 4 is a diagram illustrating an example of a vibration waveform in the first embodiment.
- FIG. 1 is a schematic diagram showing the timing of electrical pulses emitted by a receptor when stimulated.
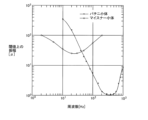
- FIG. 1 shows the frequency sensitivity distribution of Pacinian corpuscles and Meissner's corpuscles.
- 5A and 5B are diagrams illustrating an example of gain adjustment in a first gain adjustment section according to the first embodiment; 4 is a diagram illustrating an example of an output history of a microphone in the first embodiment.
- FIG. 4 is a diagram illustrating an example of a correlation between the sound pressure of background noise and the frequency in the first embodiment.
- 5A and 5B are diagrams illustrating an example of gain adjustment in a second gain adjustment unit in the first embodiment; 1 is a diagram showing a schematic layout of an interior of a vehicle in which an information transmission device according to a first embodiment is provided; 1 is a diagram showing a schematic configuration of an automatic driving system for a vehicle equipped with a second embodiment of an information transmission device to which the present invention is applied;
- the information transmission device is provided in, for example, a four-wheeled vehicle (one example being an automobile such as a passenger car) in which the two front wheels are steered (turned).
- a vehicle is equipped with an electric power steering device that applies a steering assist force by means of an electric motor to a steering device that steers the front wheels.
- FIG. 1 is a diagram showing a schematic configuration of an electric power steering device for a vehicle according to a first embodiment.
- the electric power steering device 1 is composed of a steering wheel 10, a steering shaft 20, an intermediate shaft 21, a pinion shaft 22, a rack shaft 30, a rack housing 40, a tie rod 50, a housing 60, a steering angle sensor 71, a torque sensor 72, an actuator unit 80, an electric power steering control unit (EPS control unit) 90, etc.
- EPS control unit electric power steering control unit
- the steering wheel 10 is, for example, a circular ring-shaped operating member that is turned by a driver to input a steering operation.
- the steering wheel 10 is disposed in the passenger compartment of the vehicle, facing the driver's seat. The occupant (driver) senses the steering feeling of the vehicle from the sensation (tactile sensation) transmitted from the steering wheel 10 to his/her fingers.
- the steering shaft 20 is a rotating shaft having one end attached to the steering wheel 10, and transmits the rotational motion of the steering wheel 10 to a rack and pinion mechanism that converts it into translational motion in the vehicle width direction.
- An intermediate shaft 21 and a pinion shaft 22 are connected in this order to the end of the steering shaft 20 opposite the steering wheel 10 side.
- Universal joints (Cardan joints) 23, 24 are provided between the steering shaft 20 and the intermediate shaft 21, and between the intermediate shaft 21 and the pinion shaft 22, respectively, so that rotation can be transmitted when the shafts are bent.
- a pinion gear is formed at the tip of the pinion shaft 22 , which meshes with a rack gear 31 of the rack shaft 30 to drive the rack shaft 30 .
- the rack shaft 30 is a columnar member arranged such that its longitudinal direction (axial direction) is aligned with the vehicle width direction.
- the rack shaft 30 is supported so as to be capable of translation in the vehicle width direction relative to the vehicle body.
- a rack gear 31 that meshes with the pinion gear of the pinion shaft 22 is formed on a part of the rack shaft 30 .
- the rack gear 31 of the rack shaft 30 is driven by the pinion gear, and moves in a translational (straight) direction along the vehicle width direction.
- the rack gear 31 is disposed offset to either the left or right side (usually the driver's seat side) in the vehicle width direction. For example, if the vehicle is a so-called right-hand drive vehicle with the driver's seat on the right front seat, the rack gear 31 is positioned offset to the right of the center when in neutral.
- the rack housing 40 is a substantially cylindrical member that supports and houses the rack shaft 30 so that the rack shaft 30 is relatively displaceable in the vehicle width direction.
- Rack boots 41 are provided on both ends of the rack housing 40 .
- the rack boot 41 is a member that prevents foreign matter such as dust from entering the rack housing 40 while allowing relative displacement of the tie rod 50 with respect to the rack housing 40 .
- the rack boot 41 is made of a resin material such as an elastomer and has a flexible bellows-like shape.
- the tie rod 50 is an axial interlocking member that connects the end of the rack shaft 30 and a knuckle arm 61 of the housing 60 and rotates the housing 60 about the kingpin axis in conjunction with the translational movement of the rack shaft 30.
- An inner end of the tie rod 50 in the vehicle width direction is swingably connected to an end of the rack shaft 30 via a ball joint 51 .
- the outer end of the tie rod 50 in the vehicle width direction is connected to a knuckle arm 61 of a housing 60 via a ball joint 52 .
- the housing (knuckle) 60 is a member that accommodates a hub bearing that supports the wheel W rotatably around the axle.
- the housing 60 has a knuckle arm 61 formed to protrude forward or rearward with respect to the axle.
- the housing 60 is supported so as to be rotatable about a kingpin axis, which is a predetermined central axis of rotation.
- the kingpin axis is an imaginary axis connecting the bearing center of the strut top mount and the center of the ball joint that connects the lower part of the housing 60 and the transverse link (lower arm).
- the housing 60 is pushed and pulled in the vehicle width direction by the rack shaft 30 via the tie rod 50, thereby rotating about the kingpin axis and steering the wheels W.
- the steering angle sensor 71 is an angle encoder that detects the rotational angle position of the pinion shaft 22 .
- the output of the steering angle sensor 71 is transmitted to an electric power steering control unit 90 .
- the electric power steering control unit 90 is capable of calculating the steering angle ⁇ of the wheels W (the toe change angle associated with steering) based on the output of the steering angle sensor 71 .
- the torque sensor 72 is a sensor that detects the torque acting on the pinion shaft 22 (mainly the steering force applied by the driver).
- the torque sensor 72 is provided on a portion of the pinion shaft 22 closer to the intermediate shaft 21 than the actuator unit 80 is.
- the output of the torque sensor 72 is transmitted to an electric power steering control unit 90 .
- the actuator unit 80 is a drive device that rotates the pinion shaft 22 to provide power assist during manual driving and perform steering operations during automatic driving.
- the actuator unit 80 includes a motor 81, a gear box 82, and the like.
- the motor 81 is an electric actuator that generates a driving force to be applied to the steering shaft 20 .
- the rotation direction and output torque of the motor 81 are controlled by an electric power steering control unit 90 .
- the gear box 82 is equipped with a reduction gear train that reduces the speed (torque amplifies) of the rotational output of the motor 81 and transmits it to the pinion shaft 22 .
- An electric power steering (EPS) control unit 90 is a control device (motor control unit) that gives a current command value to the motor 81 to control the rotation direction and output torque.
- the electric power steering control unit 90 can be configured as a microcomputer having, for example, an information processing section such as a CPU, a storage section such as a RAM or a ROM, an input/output interface, and a bus connecting these.
- the electric power steering control unit 90 is capable of acquiring information such as the outputs of the steering angle sensor 71 and the torque sensor 72, the vehicle's running speed (vehicle speed), and the operating status of other on-board electronic devices, either directly or via an on-board LAN such as a CAN communication system.
- the electric power steering control unit 90 sets a current command value to be given to the motor 81 based on the torque input direction and the detected torque value of the torque sensor 72 .
- the electric power steering control unit 90 includes a power supply device that supplies electric power of a current value and a voltage value according to a current command value to the motor 81 via a signal line.
- FIG. 2 is a diagram illustrating a system configuration of the information transmission device according to the first embodiment.
- the information transmission device 100 vibrates the air around the ears of the occupants using speakers 170 arranged in the vehicle cabin, and notifies the occupants of impending vehicle behavior by means of acoustic signals.
- the information transmission device 100 includes a waveform generating section 110, a differential calculation section 120, a first gain adjustment section 130, a microphone 140, a sensing value calculation section 150, a second gain adjustment section 160, a speaker 170, and the like.
- the waveform generating section 110 generates an excitation waveform, which is the waveform of an acoustic signal generated by the speaker 170 .
- FIG. 3 is a diagram illustrating an example of a vibration waveform in the first embodiment.
- the horizontal axis represents time
- the vertical axis represents voltage (amplitude).
- the excitation waveform can be a sine wave.
- the excitation waveform may be a waveform in which a plurality of sine waves with different wavelengths are superimposed (combined).
- the vibration waveforms are not limited to these and can be changed as appropriate.
- various waveforms such as a square wave, a triangular wave, and a waveform simulating the sound of a vehicle running can be used alone or in combination with other waveforms.
- the frequency of the vibration waveform can be set to have a dominant frequency in the range of, for example, 100 to 400 Hz, more preferably, 150 to 300 Hz.
- the sensory receptors that detect the vibrations include Merkel cells, Meissner's corpuscles, and Pacinian corpuscles.
- FIG. 4 is a diagram showing a schematic diagram of the timing of an electrical pulse emitted by a receptor when stimulated.
- the horizontal axis indicates time
- the vertical axis indicates, from the top, pressure and the electrical pulse generation state of Merkel cells, Meissner's corpuscles, and Pacinian corpuscles.
- Merkel cells have a relatively slow response and respond to a direct current component.
- Meissner's corpuscles correspond to when a rate of change (velocity) of contact pressure occurs.
- Pacinian corpuscles respond to moments of transient change and are said to be the most sensitive of these receptors. It is believed that the Pacinian corpuscles are the most sensitive receptors for allowing passengers to sense minute vibrations as combined auditory and tactile information.
- FIG. 5 is a diagram showing the frequency sensitivity distribution of Pacinian corpuscles and Meissner corpuscles.
- the horizontal axis indicates frequency and the vertical axis indicates amplitude above the threshold, with smaller values indicating better sensitivity.
- the Pacinian corpuscles exhibit good sensitivity in the region around 100 to 400 Hz, and even better sensitivity in the region around 150 to 300 Hz. Such a range is included in the range of 20 Hz to 20 kHz, which is generally considered to be the range of human hearing.
- the dominant frequency of the excitation waveform can be set to 250 Hz, for example.
- the differential calculation section 120 acquires information on the steering angle ⁇ of the wheels W detected by the steering angle sensor 71 from the electric power steering control unit 90, and calculates a differential value ⁇ by time differentiation.
- the differential calculation unit 120 sequentially transmits the calculated differential value ⁇ to the first gain adjustment unit 130 .
- the first gain adjustment section 130 performs a first gain adjustment, which will be described below, on the fundamental wave of the excitation waveform generated by the waveform generation section 110 .
- the first gain adjustment changes the gain G1, which is the output gain multiplied by the voltage of the excitation waveform, in accordance with the differential value (rate of change per time) of the steering angle ⁇ of the steering device (a parameter correlated to the steering amount).
- FIG. 6 is a diagram illustrating an example of gain adjustment in the first gain adjustment unit.
- the horizontal axis indicates the absolute value of the differential value ⁇ of the steering angle ⁇ of the wheel FW
- the vertical axis indicates the gain G1 by which the voltage of the excitation waveform is multiplied.
- the gain G1 may be configured to increase in accordance with an increase in the absolute value of the differential value ⁇ .
- the rate of increase in gain G1 in response to an increase in the absolute value of the differential value ⁇ in the first gain adjustment unit 130 can be configured to be maximum in a region where the absolute value of the differential value ⁇ is small, and to decrease as the absolute value of the differential value ⁇ increases.
- the gain G1 in the first gain adjustment unit 130 can be calculated, for example, from the absolute value of the differential value ⁇ of the steering angle ⁇ using a logarithmic function.
- the gain G1 is expressed, for example, by the following equation 1.
- Gain G1 log(absolute value of steering angle differential value ⁇ coefficient k) (Equation 1)
- the coefficient k can be a value set, for example, during the development stage of the vehicle, in accordance with the characteristics of the vehicle (for example, the yaw gain relative to the steering angle ⁇ , the center of gravity position, etc.).
- the microphone 140 is provided inside the vehicle cabin and is a sound collecting device that collects background noise inside the vehicle cabin.
- the microphone 140 is preferably disposed in a position close to the ear of the passenger, and may be provided, for example, in the headrest portion of the seat.
- the output of the microphone 140 is transmitted to the sensing value calculation unit 150 .
- the sensing value calculation unit 150 extracts components of a predetermined frequency band from the background noise of the vehicle acquired by the microphone 140, and transmits the sound pressure of the extracted components to the second gain adjustment unit 160 as a sensing value.
- FIG. 7 is a diagram illustrating an example of an output history of a microphone. In FIG. 7, the horizontal axis indicates time, and the vertical axis indicates the sound pressure of the background noise picked up by the microphone 140.
- the sensing value calculation unit 150 performs a fast Fourier transform (FFT) process on the acoustic signal of the background noise acquired by the microphone 140 to convert it into the frequency domain, and further performs a band-pass filter process to extract components in a predetermined frequency band.
- the frequency band to be extracted is set so as to include the dominant frequency of the excitation waveform output by the waveform generating unit 110 .
- the sensing value calculation section 150 sets the average sound pressure of the extracted frequency band as a sensing value to be used in the second gain adjustment.
- FIG. 8 is a diagram showing an example of the correlation between the sound pressure of background noise and the frequency.
- the horizontal axis represents frequency
- the vertical axis represents sound pressure.
- the bandpass filter can be configured to extract a frequency band in the vicinity of the dominant frequency (for example, 250 Hz) of the excitation waveform in the waveform generating unit 110, for example.
- the sound pressure in the extracted frequency band (for example, the average value of the frequency band) is provided to the second gain adjuster 160 as a sensing value.
- the second gain adjustment section 160 further performs a second gain adjustment, which will be described below, on the vibration waveform after the first gain adjustment.
- the second gain adjustment changes the gain of the excitation waveform according to the sensing value of the noise inside the vehicle in order to adjust the output amplitude of the excitation waveform according to changes in background noise (drivetrain noise, aerodynamic noise, road noise, etc.) while the vehicle is running.
- the second gain adjustment unit 160 performs a second gain adjustment based on the output of the sensing value calculation unit 150 .
- the second gain adjustment section 160 sets the gain G2 based on the sensing value output by the sensing value calculation section 150 .
- FIG. 9 is a diagram illustrating an example of gain adjustment in the second gain adjustment section.
- the horizontal axis indicates the sensing value
- the vertical axis indicates the gain G2 by which the voltage of the vibration waveform is multiplied.
- the gain G2 can be configured to increase as the sensing value increases.
- the gain G2 is set so that the sound pressure of the sound generated by the excitation amplitude output from the speaker 170 does not dominate the sound pressure of background noise near the ears of the passengers.
- the gain G2 is set so that the sound generated by the excitation amplitude blends into the background noise of the vehicle and reaches a sound pressure level that can be unconsciously heard by the occupants.
- Equation 2 The output value (voltage) A of the vibration waveform after the first gain adjustment and the second gain adjustment described above is expressed by Equation 2.
- Output value A Waveform generating unit output value x Gain G1
- Gain G2 Waveform generating unit output value ⁇ log (absolute value of steering angle differential value ⁇ ⁇ coefficient k) ⁇ Gain G2 (Equation 2)
- the speaker 170 is a vibration device that is disposed inside the vehicle cabin and uses the output value A to vibrate the air around the passengers in the vehicle cabin to generate sound.
- Speaker 170 may be configured to be shared with a speaker used for audio reproduction in an in-car audio device, for example.
- a speaker 170 dedicated to the information transmission device 100 may be provided.
- FIG. 10 is a diagram showing a schematic layout of the interior of a vehicle in which the information transmission device of the first embodiment is provided. Inside the vehicle interior 200, a driver's seat 210, a passenger seat 220, a rear seat 230, an instrument panel 240, etc. are provided.
- a driver's seat 210 and a passenger seat 220 are front seats provided at the front of the vehicle compartment.
- a driver's seat 210 and a passenger seat 220 are provided side by side in the vehicle width direction.
- the vehicle is, as an example, a so-called right-hand drive vehicle, with the driver's seat 210 being provided on the right side and the passenger seat 220 being provided on the left side with respect to the center of the vehicle body in the lateral direction.
- the driver's seat 210 and the passenger seat 220 each have a cushion portion on which the occupant's buttocks and thighs are placed, a seat back portion disposed behind the occupant's back, and a headrest portion disposed behind the occupant's head.
- the rear seat 230 is a bench-like seat arranged behind the driver's seat 210 and the passenger seat 220.
- the rear seat 230 can accommodate, for example, two passengers sitting side by side.
- the rear seat 230 has a cushion portion on which the occupant's buttocks and thighs are placed, a seat back portion disposed behind the occupant's back, and a headrest portion provided behind the occupant's head.
- the right seating portion of the rear seat 230 is disposed behind the driver's seat 210
- the left seating portion is disposed behind the passenger seat 220 .
- the instrument panel 240 is provided near the front end of the vehicle interior 200, and is a member that houses, for example, an instrument panel, an air conditioning and heating system, an infotainment system, and the like.
- the instrument panel 240 is disposed so as to face the occupants seated in the driver's seat 210 and the passenger seat 220 .
- each speaker 170 is provided spaced apart on the front, rear, left and right sides of the vehicle interior 200.
- the reference numerals of the speakers 170 are given subscripts corresponding to their positions.
- the right front speaker 170FR is disposed near the right end of the instrument panel 240.
- the speaker 170FR is a directional speaker that is directed toward the head (ears) of an occupant seated in the driver's seat 210.
- the left front speaker 170FL is disposed near the left end of the instrument panel 240.
- Speaker 170FL is a directional speaker that is directed toward the head (ears) of an occupant seated in passenger seat 220.
- the right rear speaker 170RR is disposed in the headrest portion of the driver's seat 210.
- Speaker 170RR is a directional speaker that is directed toward the head (ear) of an occupant seated on the right side of rear seat 230.
- the left rear speaker 170RL is disposed in the headrest of the passenger seat 220.
- Speaker 170RL is a directional speaker that is directed toward the head (ear) of an occupant seated on the left side of rear seat 230.
- the sound can enable occupants to predict the occurrence of a behavior that will occur at the beginning of steering, before the lateral acceleration, yaw rate, roll angle, etc. actually occur in the vehicle. This improves the occupant's predictability of vehicle behavior, and prevents the occupant from feeling abruptness due to the vehicle behavior. This allows the occupant to prepare for the occurrence of acceleration or the like by, for example, exerting force on the body, thereby preventing the occupant from unintentionally losing his/her seated position, etc.
- the excitation waveform has a dominant frequency in the frequency band of 100 to 400 Hz, more preferably 150 to 300 Hz, so that Pacinian corpuscles, which are in the audible range and highly sensitive to skin sensation, can be used, improving the passenger's perception of sound through acoustics and recognition of skin sensation. This allows information to be transmitted to the passenger more reliably.
- (3) By setting the gain G1 using a logarithmic function from the absolute value of the derivative value ⁇ of the steering angle ⁇ , it is possible to set a large gain G1 even in an area where the absolute value of the derivative value ⁇ is relatively small.
- the vehicle is provided with an automatic driving function that performs steering operations, acceleration/deceleration operations, etc., independently of the driving operations of the driver.
- FIG. 11 is a diagram illustrating a schematic configuration of an automatic driving system for a vehicle in which an information transmission device according to the second embodiment is provided.
- the autonomous driving system 300 includes, in addition to the electric power steering control unit 90 described above, an autonomous driving control unit 310, an engine control unit 320, a transmission control unit 330, a brake control unit 340, and the like.
- Each of these units includes a microcomputer having an information processing section such as a CPU, a storage section such as a RAM or a ROM, an input/output interface, and a bus connecting these.
- each unit is connected directly or via an in-vehicle LAN such as a CAN communication system, and is capable of communicating with each other.
- the autonomous driving control unit 310 recognizes the environment around the vehicle using various sensors such as a stereo camera device, a millimeter wave radar device, a laser scanner device, and a high-precision 3D map.
- the autonomous driving control unit 310 generates an autonomous driving scenario based on the recognized environment, including information regarding the vehicle's driving line, speed, etc.
- the autonomous driving control unit 310 issues instructions to the electric power steering control unit 90, the engine control unit 320, the transmission control unit 330, and the brake control unit 340 based on an autonomous driving scenario, and controls the steering and acceleration/deceleration of the vehicle.
- the electric power steering control unit 90 controls the actuator unit 80 in response to the required steering angle instructed by the automatic driving control unit 310, and steers the wheels W.
- the engine control unit 320 comprehensively controls the engine, which is the power source for running the vehicle, and its accessories.
- the engine control unit 320 controls the output of the engine so that the torque actually generated by the engine matches the required torque specified by the automatic driving control unit 310 .
- the transmission control unit 330 comprehensively controls the transmission, which changes the speed (slows down or speeds up) the rotation of the output shaft of the engine, and its accessories.
- the transmission control unit 330 switches between the driving range and the non-driving range, switches between forward and reverse travel, and changes gears (changes the gear ratio) when traveling forward, in response to instructions from the automatic driving control unit 310.
- the brake control unit 340 controls the braking force of the hydraulic service brakes provided on each wheel of the vehicle.
- the brake control unit 340 adjusts the brake fluid pressure supplied to the wheel cylinders of each wheel in accordance with the required braking force instructed by the automatic driving control unit 310, and generates the necessary braking force.
- the required steering angle transmitted from the autonomous driving control unit 310 to the electric power steering control unit 90 is used as an input to the information transmission device 100 (a parameter correlated with the steering angle of the steering device), and a first gain adjustment is performed based on its differential value.
- the information transmission device 100 a parameter correlated with the steering angle of the steering device
- a first gain adjustment is performed based on its differential value.
- the present invention is not limited to the above-described embodiment, and various modifications and variations are possible, which are also within the technical scope of the present invention.
- the configurations of the information transmission device and the vehicle are not limited to those in the above-described embodiments and may be modified as appropriate.
- the hardware configuration of the information transmission device and the specific method of adjusting the gain of the vibration waveform are not limited to the configurations of each embodiment and can be changed as appropriate.
- a steering angle actual steering angle detected by a steering angle sensor, or a required steering angle in automatic driving control
- the parameter is not limited to this and can be changed as appropriate.
- the configuration may include at least one of the steering torque (input torque) input from the driver, the amount of operation of an actuator that steers the wheels (for example, the amount of rotation of a motor), and an output instruction value to the actuator.
- the present invention is not limited to those in which an operating member such as a steering wheel is mechanically connected to a steering mechanism such as a steering gear box as in the respective embodiments, but can also be applied to a vehicle having a steer-by-wire type steering device in which the steering mechanism is not mechanically connected to the steering wheel, etc.
- the actual steering angle of the front wheels and the state of the steering mechanism (for example, the rotation angle position of the pinion gear, the amount of movement of the rack shaft, etc.) can be used as parameters correlated with the steering amount of the steering device.
- the level of background noise of the vehicle is obtained by a microphone as an example, but the invention is not limited to this and the level of background noise may be obtained by other methods.
- the level of background noise may be estimated based on the acceleration of the unsprung part of the vehicle, which correlates with the input from the road surface, or the output value of a torque sensor of the steering device (torsion bar torque).
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Human Computer Interaction (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
【課題】車両の操舵により発生する挙動に対する乗員の予見性を向上する情報伝達装置を提供する。 【解決手段】車輪Wを操舵する操舵装置1を有する車両に設けられる情報伝達装置100を、操舵装置の操舵量に相関するパラメータθを検出するパラメータ検出部71と、加振波形を生成する加振波形生成部110と、加振波形を用いて乗員の周囲の空気を加振する加振部170と、加振波形の出力ゲインをパラメータの微分値Δθの絶対値の増加に応じて増加させるゲイン調整部130とを備える構成とする。
Description
本発明は、車両の乗員に車両の挙動に関する情報を伝達する情報伝達装置に関する。
自動車等の車両において、車両の状態に応じて乗員に対し音声を出力することに関する技術として、例えば特許文献1には、操舵角および操舵方向を容易に認識可能な運転支援装置を提供するため、ステアリングホイールの操舵量を、操舵量に連動して変化する音によって示すことが記載されている。
具体的には、操舵量が大きくなるほど音階を高くするように制御することや、音の強弱、音の高低、音色、音圧、周波数、音像の位置等を変化させてステアリングホイールの操舵量を示すことが記載されている。
特許文献2には、車両の挙動や運転者の操作を反映した楽曲が簡易に生成される車両用音楽生成装置であって、車両の運転者の操作もしくは車両の挙動に基づく各々の情報に夫々対応させた複数の音源ループパターンを記憶する記憶ユニットと、各々の情報に応じて複数の音源ループパターンから特定の音源ループパターンを選択し、出力もしくは出力停止の制御をする制御ユニットとを備えるものが記載されている。
具体的には、操舵量が大きくなるほど音階を高くするように制御することや、音の強弱、音の高低、音色、音圧、周波数、音像の位置等を変化させてステアリングホイールの操舵量を示すことが記載されている。
特許文献2には、車両の挙動や運転者の操作を反映した楽曲が簡易に生成される車両用音楽生成装置であって、車両の運転者の操作もしくは車両の挙動に基づく各々の情報に夫々対応させた複数の音源ループパターンを記憶する記憶ユニットと、各々の情報に応じて複数の音源ループパターンから特定の音源ループパターンを選択し、出力もしくは出力停止の制御をする制御ユニットとを備えるものが記載されている。
車両の操舵開始から実際に車体の挙動が発生し、横加速度、ヨーレート、ロール角などが発生するまでの間には時間応答遅れがあることから、操舵動作の状況によっては、乗員は横加速度等が唐突に発生したと感じ、適切に身体を保持できないこと等により不快感や不安感を受ける場合がある。
これに対し、例えば車両の舵角に対するヨーレートゲインを下げたり、シートなどによる乗員のホールド性を高めたりするなどの対策も考えられる。
しかし、ヨーレートゲインを下げた場合、車両の応答性が緩慢となって車両の性能や商品性が損なわれてしまう。また、シートによる対策は、様々な体型の乗員に適切に対応することは困難である。
上述した問題に鑑み、本発明の課題は、車両の操舵により発生する挙動に対する乗員の予見性を向上する情報伝達装置を提供することである。
これに対し、例えば車両の舵角に対するヨーレートゲインを下げたり、シートなどによる乗員のホールド性を高めたりするなどの対策も考えられる。
しかし、ヨーレートゲインを下げた場合、車両の応答性が緩慢となって車両の性能や商品性が損なわれてしまう。また、シートによる対策は、様々な体型の乗員に適切に対応することは困難である。
上述した問題に鑑み、本発明の課題は、車両の操舵により発生する挙動に対する乗員の予見性を向上する情報伝達装置を提供することである。
上述した課題を解決するため、本発明の一態様に係る情報伝達装置は、車輪を操舵する操舵装置を有する車両に設けられる情報伝達装置であって、前記操舵装置の操舵量に相関するパラメータを検出するパラメータ検出部と、加振波形を生成する加振波形生成部と、前記加振波形を用いて乗員の周囲の空気を加振する加振部と、前記加振波形の出力ゲインを前記パラメータの微分値の絶対値の増加に応じて増加させるゲイン調整部とを備えることを特徴とする。
これによれば、操舵装置の操舵量に相関するパラメータの微分値(いわゆる操舵速度)の絶対値の増加に応じて音圧が増大する音響を発生させることにより、操舵の初期に、車両に実際に横加速度、ヨーレート、ロール角等が発生することに先立ち、音響によって乗員に挙動が発生することを予見させることができる。
これにより、乗員の車両挙動に対する予見性が向上し、乗員が車両の挙動に対して唐突感を受けることを防止できる。
これによれば、操舵装置の操舵量に相関するパラメータの微分値(いわゆる操舵速度)の絶対値の増加に応じて音圧が増大する音響を発生させることにより、操舵の初期に、車両に実際に横加速度、ヨーレート、ロール角等が発生することに先立ち、音響によって乗員に挙動が発生することを予見させることができる。
これにより、乗員の車両挙動に対する予見性が向上し、乗員が車両の挙動に対して唐突感を受けることを防止できる。
本発明において、前記加振波形は100乃至400Hzの周波数帯域に含まれる卓越周波数を有する構成とすることができる。
これによれば、可聴域かつ皮膚感覚で感度の高いパチニ小体等を用いることが可能となり、乗員の音響による音の感知と皮膚感覚の認知が良好になる。このため、乗員により確実に情報を伝達することができる。
ここで、より好ましくは、150乃至300Hzの周波数帯域に卓越周波数を設定することにより、受容体の感度のより良好な領域を使用し、上述した効果を促進することができる。
これによれば、可聴域かつ皮膚感覚で感度の高いパチニ小体等を用いることが可能となり、乗員の音響による音の感知と皮膚感覚の認知が良好になる。このため、乗員により確実に情報を伝達することができる。
ここで、より好ましくは、150乃至300Hzの周波数帯域に卓越周波数を設定することにより、受容体の感度のより良好な領域を使用し、上述した効果を促進することができる。
本発明において、前記ゲイン調整部における前記微分値の絶対値の増加に対する前記出力ゲインの増加率は、前記微分値の絶対値が微小な領域において最大となるとともに、前記微分値の絶対値の増加に応じて減少する構成とすることができる。
これによれば、微分値の絶対値が比較的小さい領域においても大きい出力ゲインを設定することが可能となり、舵角及び操舵速度が微小である操舵初期においても乗員に適切に情報を伝達することができる。
また、微分値の絶対値が大きい領域において、出力ゲインが過度に大きくなることを防止できる。
例えば、出力ゲインを微分値の絶対値の対数関数に基づいて設定することができる。
これによれば、微分値の絶対値が比較的小さい領域においても大きい出力ゲインを設定することが可能となり、舵角及び操舵速度が微小である操舵初期においても乗員に適切に情報を伝達することができる。
また、微分値の絶対値が大きい領域において、出力ゲインが過度に大きくなることを防止できる。
例えば、出力ゲインを微分値の絶対値の対数関数に基づいて設定することができる。
本発明において、前記ゲイン調整部は、前記加振部の前記加振により生じる音圧が、少なくとも一人の乗員の耳元で、前記車両の走行時における暗騒音に対して卓越しないよう前記出力ゲインを設定する構成とすることができる。
これによれば、加振部の加振により生じる音響が車両の暗騒音に埋没することにより、乗員に耳障りであると感じさせることを防止し、かつ、情報を適切に伝達することができる。
これによれば、加振部の加振により生じる音響が車両の暗騒音に埋没することにより、乗員に耳障りであると感じさせることを防止し、かつ、情報を適切に伝達することができる。
本発明において、前記パラメータは、前記操舵装置の舵角、前記操舵装置への入力トルク、前記車輪を操舵するアクチュエータの作動量、前記アクチュエータへの出力指示値の少なくとも一つを含む構成とすることができる。
これによれば、操舵装置の操舵量を、一般的な車両であれば容易に検出可能なパラメータを用いて適切に把握することができる。
これによれば、操舵装置の操舵量を、一般的な車両であれば容易に検出可能なパラメータを用いて適切に把握することができる。
以上説明したように、本発明によれば、車両の操舵により発生する挙動に対する乗員の予見性を向上する情報伝達装置を提供することができる。
<第1実施形態>
以下、本発明を適用した情報伝達装置の第1実施形態について説明する。
実施形態の情報伝達装置は、例えば前2輪を操舵(転舵)する4輪の車両(一例として乗用車等の自動車)に設けられるものである。
車両は、前輪を操向する操舵装置に、電動モータによって操舵アシスト力を与える電動パワーステアリング装置を備えている。
以下、本発明を適用した情報伝達装置の第1実施形態について説明する。
実施形態の情報伝達装置は、例えば前2輪を操舵(転舵)する4輪の車両(一例として乗用車等の自動車)に設けられるものである。
車両は、前輪を操向する操舵装置に、電動モータによって操舵アシスト力を与える電動パワーステアリング装置を備えている。
図1は、第1実施形態の車両の電動パワーステアリング装置の構成を模式的に示す図である。
電動パワーステアリング装置1は、ステアリングホイール10、ステアリングシャフト20、インターミディエートシャフト21、ピニオンシャフト22、ラック軸30、ラックハウジング40、タイロッド50、ハウジング60、舵角センサ71、トルクセンサ72、アクチュエータユニット80、電動パワーステアリング制御ユニット(EPS制御ユニット)90等を有して構成されている。
電動パワーステアリング装置1は、ステアリングホイール10、ステアリングシャフト20、インターミディエートシャフト21、ピニオンシャフト22、ラック軸30、ラックハウジング40、タイロッド50、ハウジング60、舵角センサ71、トルクセンサ72、アクチュエータユニット80、電動パワーステアリング制御ユニット(EPS制御ユニット)90等を有して構成されている。
ステアリングホイール10は、ドライバが回動させることによって操舵操作を入力する、例えば円環状の操作部材である。
ステアリングホイール10は、車両の車室内において、運転席と対向して配置されている。
乗員(ドライバ)は、ステアリングホイール10から手指へ伝達される感触(触覚)から、車両の操舵フィーリング(操舵感)を感知する。
ステアリングホイール10は、車両の車室内において、運転席と対向して配置されている。
乗員(ドライバ)は、ステアリングホイール10から手指へ伝達される感触(触覚)から、車両の操舵フィーリング(操舵感)を感知する。
ステアリングシャフト20は、一方の端部がステアリングホイール10に取り付けられた回転軸であって、ステアリングホイール10の回転動作を、車幅方向の並進運動に変換するラックアンドピニオン機構に伝達する回転軸である。
ステアリングシャフト20のステアリングホイール10側とは反対側の端部には、インターミディエートシャフト21、ピニオンシャフト22が順次接続されている。
ステアリングシャフト20のステアリングホイール10側とは反対側の端部には、インターミディエートシャフト21、ピニオンシャフト22が順次接続されている。
ステアリングシャフト20とインターミディエートシャフト21との間、及び、インターミディエートシャフト21とピニオンシャフト22との間には、各軸が屈曲した状態で回転を伝達可能なユニバーサルジョイント(カルダンジョイント)23,24がそれぞれ設けられている。
ピニオンシャフト22の先端部には、ラック軸30のラックギヤ31と噛み合ってラック軸30を駆動するピニオンギヤが形成されている。
ピニオンシャフト22の先端部には、ラック軸30のラックギヤ31と噛み合ってラック軸30を駆動するピニオンギヤが形成されている。
ラック軸30は、長手方向(軸方向)が車幅方向に沿うように配置された柱状の部材である。
ラック軸30は、車体に対して車幅方向に並進可能に支持されている。
ラック軸30の一部には、ピニオンシャフト22のピニオンギヤと噛合うラックギヤ31が形成されている。
ラック軸30は、ステアリングシャフト20の回転に応じて、ピニオンギヤによってラックギヤ31が駆動され、車幅方向に沿って並進(直進)する。
ラックギヤ31は、車幅方向において、左右いずれか一方(通常は運転席側)にオフセットして配置される。
例えば、車両が右側前席を運転席とするいわゆる右ハンドル車である場合には、ラックギヤ31は、中立時における中央よりも右側にオフセットして配置される。
ラック軸30は、車体に対して車幅方向に並進可能に支持されている。
ラック軸30の一部には、ピニオンシャフト22のピニオンギヤと噛合うラックギヤ31が形成されている。
ラック軸30は、ステアリングシャフト20の回転に応じて、ピニオンギヤによってラックギヤ31が駆動され、車幅方向に沿って並進(直進)する。
ラックギヤ31は、車幅方向において、左右いずれか一方(通常は運転席側)にオフセットして配置される。
例えば、車両が右側前席を運転席とするいわゆる右ハンドル車である場合には、ラックギヤ31は、中立時における中央よりも右側にオフセットして配置される。
ラックハウジング40は、ラック軸30を車幅方向に沿って相対変位可能に支持しつつ収容する実質的に円筒状の部材である。
ラックハウジング40の両端部には、ラックブーツ41が設けられている。
ラックブーツ41は、ラックハウジング40に対するタイロッド50の相対変位を許容しつつ、ラックハウジング40内へのダスト等の異物の侵入を防止する部材である。
ラックブーツ41は、例えばエラストマー等の樹脂系材料によって、可撓性を有する蛇腹筒状に形成されている。
ラックハウジング40の両端部には、ラックブーツ41が設けられている。
ラックブーツ41は、ラックハウジング40に対するタイロッド50の相対変位を許容しつつ、ラックハウジング40内へのダスト等の異物の侵入を防止する部材である。
ラックブーツ41は、例えばエラストマー等の樹脂系材料によって、可撓性を有する蛇腹筒状に形成されている。
タイロッド50は、ラック軸30の端部とハウジング60のナックルアーム61とを連結し、ハウジング60をラック軸30の並進方向の動きと連動させてキングピン軸回りに回動させる軸状の連動部材である。
タイロッド50の車幅方向内側の端部は、ボールジョイント51を介して、ラック軸30の端部に揺動可能に連結されている。
タイロッド50の車幅方向外側の端部は、ボールジョイント52を介して、ハウジング60のナックルアーム61に連結されている。
タイロッド50の車幅方向内側の端部は、ボールジョイント51を介して、ラック軸30の端部に揺動可能に連結されている。
タイロッド50の車幅方向外側の端部は、ボールジョイント52を介して、ハウジング60のナックルアーム61に連結されている。
ハウジング(ナックル)60は、車輪Wを車軸回りに回転可能に支持するハブベアリングを収容する部材である。
ハウジング60は、車軸に対して前方側又は後方側に突き出して形成されたナックルアーム61を有する。
ハウジング60は、所定の回転中心軸であるキングピン軸回りに回動可能に支持されている。
キングピン軸は、例えば、車両のフロントサスペンションがマクファーソン式ストラット式である場合には、ストラットトップマウントのベアリング中心と、ハウジング60下部とトランスバースリンク(ロワアーム)とを接続するボールジョイントの中心とを結んだ仮想軸である。
ハウジング60は、タイロッド50を介してラック軸30により車幅方向に押し引きされることにより、キングピン軸回りに回動し、車輪Wを転舵させる。
ハウジング60は、車軸に対して前方側又は後方側に突き出して形成されたナックルアーム61を有する。
ハウジング60は、所定の回転中心軸であるキングピン軸回りに回動可能に支持されている。
キングピン軸は、例えば、車両のフロントサスペンションがマクファーソン式ストラット式である場合には、ストラットトップマウントのベアリング中心と、ハウジング60下部とトランスバースリンク(ロワアーム)とを接続するボールジョイントの中心とを結んだ仮想軸である。
ハウジング60は、タイロッド50を介してラック軸30により車幅方向に押し引きされることにより、キングピン軸回りに回動し、車輪Wを転舵させる。
舵角センサ71は、ピニオンシャフト22の回転角度位置を検出する角度エンコーダである。
舵角センサ71の出力は、電動パワーステアリング制御ユニット90に伝達される。
電動パワーステアリング制御ユニット90は、舵角センサ71の出力に基づいて、車輪Wの舵角(操舵に伴うトー変化角)θを算出することが可能である。
舵角センサ71の出力は、電動パワーステアリング制御ユニット90に伝達される。
電動パワーステアリング制御ユニット90は、舵角センサ71の出力に基づいて、車輪Wの舵角(操舵に伴うトー変化角)θを算出することが可能である。
トルクセンサ72は、ピニオンシャフト22に作用しているトルク(主にドライバによる操舵操作力)を検出するセンサである。
トルクセンサ72は、ピニオンシャフト22におけるアクチュエータユニット80よりもインターミディエートシャフト21側の部分に設けられる。
トルクセンサ72の出力は、電動パワーステアリング制御ユニット90に伝達される。
トルクセンサ72は、ピニオンシャフト22におけるアクチュエータユニット80よりもインターミディエートシャフト21側の部分に設けられる。
トルクセンサ72の出力は、電動パワーステアリング制御ユニット90に伝達される。
アクチュエータユニット80は、ピニオンシャフト22を回転駆動して、手動運転時におけるパワーアシストや、自動運転時における操舵動作を行う駆動装置である。
アクチュエータユニット80は、モータ81、ギヤボックス82等を有して構成されている。
モータ81は、ステアリングシャフト20に与えられる駆動力を発生する電動アクチュエータである。
モータ81は、回転方向及び出力トルクを、電動パワーステアリング制御ユニット90によって制御されている。
ギヤボックス82は、モータ81の回転出力を減速(トルク増幅)してピニオンシャフト22に伝達する減速ギヤ列を備えている。
アクチュエータユニット80は、モータ81、ギヤボックス82等を有して構成されている。
モータ81は、ステアリングシャフト20に与えられる駆動力を発生する電動アクチュエータである。
モータ81は、回転方向及び出力トルクを、電動パワーステアリング制御ユニット90によって制御されている。
ギヤボックス82は、モータ81の回転出力を減速(トルク増幅)してピニオンシャフト22に伝達する減速ギヤ列を備えている。
電動パワーステアリング(EPS)制御ユニット90は、モータ81に対して回転方向及び出力トルクを制御する電流指示値を与える制御装置(モータ制御部)である。
電動パワーステアリング制御ユニット90は、例えば、CPU等の情報処理部、RAMやROMなどの記憶部、入出力インターフェイス、及び、これらを接続するバス等を有するマイコンとして構成することができる。
電動パワーステアリング制御ユニット90は、例えばCAN通信システムなどの車載LANを介して、あるいは、直接に、舵角センサ71、トルクセンサ72の出力や、車両の走行速度(車速)、他の車載電子機器類の稼働状態などの情報を取得可能となっている。
電動パワーステアリング制御ユニット90は、例えば、CPU等の情報処理部、RAMやROMなどの記憶部、入出力インターフェイス、及び、これらを接続するバス等を有するマイコンとして構成することができる。
電動パワーステアリング制御ユニット90は、例えばCAN通信システムなどの車載LANを介して、あるいは、直接に、舵角センサ71、トルクセンサ72の出力や、車両の走行速度(車速)、他の車載電子機器類の稼働状態などの情報を取得可能となっている。
電動パワーステアリング制御ユニット90は、車両の手動運転時においては、トルクセンサ72のトルク入力方向及び検出トルク値に基づいて、モータ81に与えられる電流指示値を設定する。
電動パワーステアリング制御ユニット90は、信号線を介して、モータ81に電流指示値に応じた電流値、電圧値の電力を供給する電源装置を備えている。
電動パワーステアリング制御ユニット90は、信号線を介して、モータ81に電流指示値に応じた電流値、電圧値の電力を供給する電源装置を備えている。
図2は、第1実施形態の情報伝達装置のシステム構成を模式的に示す図である。
情報伝達装置100は、車室内に配置されたスピーカ170により乗員の耳部周辺の空気を振動させ、乗員に対して車両の挙動が生ずる前兆を音響信号により報知するものである。
情報伝達装置100は、波形生成部110、微分演算部120、第1ゲイン調整部130、マイクロフォン140、センシング値演算部150、第2ゲイン調整部160、スピーカ170等を有する。
情報伝達装置100は、車室内に配置されたスピーカ170により乗員の耳部周辺の空気を振動させ、乗員に対して車両の挙動が生ずる前兆を音響信号により報知するものである。
情報伝達装置100は、波形生成部110、微分演算部120、第1ゲイン調整部130、マイクロフォン140、センシング値演算部150、第2ゲイン調整部160、スピーカ170等を有する。
波形生成部110は、スピーカ170が発生する音響信号の波形である加振波形を生成するものである。
図3は、第1実施形態における加振波形の例を模式的に示す図である。
図3において、横軸は時間を示し、縦軸は電圧(振幅)を示している。
例えば図3(a)に示すように、加振波形は、正弦波とすることができる。
また、例えば図3(b)に示すように、加振波形は、波長の異なる複数の正弦波を重畳(合成)した波形とすることができる。
また、加振波形は、これらに限定されず、適宜変更することができる。
例えば、加振波形として、矩形波、三角波や、車両の走行音を模した波形など各種の波形を単独で、あるいは、他の波形と合成して、用いることができる。
図3は、第1実施形態における加振波形の例を模式的に示す図である。
図3において、横軸は時間を示し、縦軸は電圧(振幅)を示している。
例えば図3(a)に示すように、加振波形は、正弦波とすることができる。
また、例えば図3(b)に示すように、加振波形は、波長の異なる複数の正弦波を重畳(合成)した波形とすることができる。
また、加振波形は、これらに限定されず、適宜変更することができる。
例えば、加振波形として、矩形波、三角波や、車両の走行音を模した波形など各種の波形を単独で、あるいは、他の波形と合成して、用いることができる。
第1実施形態において、加振波形の周波数は、例えば100乃至400Hz、より好ましくは150乃至300Hzの範囲に卓越周波数を有するよう設定することができる。
以下、その理由について説明する。
乗員の周囲の空気が加振された際、振動を感知する感覚受容体として、メルケル細胞、マイスナー小体、パチニ小体などがある。
図4は、刺激を受けた際に受容体が発する電気パルスのタイミングを模式的に示す図である。
図4において、横軸は時間を示し、縦軸は上段から順に、圧力、及び、メルケル細胞、マイスナー小体、パチニ小体の電気パルス発生状態を示している。
以下、その理由について説明する。
乗員の周囲の空気が加振された際、振動を感知する感覚受容体として、メルケル細胞、マイスナー小体、パチニ小体などがある。
図4は、刺激を受けた際に受容体が発する電気パルスのタイミングを模式的に示す図である。
図4において、横軸は時間を示し、縦軸は上段から順に、圧力、及び、メルケル細胞、マイスナー小体、パチニ小体の電気パルス発生状態を示している。
メルケル細胞は、応答が比較的遅く、直流成分に対応する。
マイスナー小体は、接触圧力の変化率(速度)が発生しているときに対応する。
パチニ小体は、過渡的変化の瞬間に対応し、これらの受容器のなかでは最も感度が高いとされる。
乗員が微小な振動を聴覚及び触覚の複合情報として感じ取る受容器として、パチニ小体の感度が最も良好であると考えられる。
マイスナー小体は、接触圧力の変化率(速度)が発生しているときに対応する。
パチニ小体は、過渡的変化の瞬間に対応し、これらの受容器のなかでは最も感度が高いとされる。
乗員が微小な振動を聴覚及び触覚の複合情報として感じ取る受容器として、パチニ小体の感度が最も良好であると考えられる。
図5は、パチニ小体及びマイスナー小体の周波数に対する感度分布を示す図である。
図5において、横軸は周波数を示し、縦軸は閾値上の振幅を示しており、値が小さいほど感度が良いことを表わす。
図5に示すように、パチニ小体は、100乃至400Hz付近の領域において良好な感度を示し、特に150乃至300Hzにおいてさらに良好な感度を示す。
このような領域は、一般に人間の可聴域とされる20Hz乃至20kHzの範囲に含まれる。
加振波形の卓越周波数は、一例として250Hzに設定することができる。
図5において、横軸は周波数を示し、縦軸は閾値上の振幅を示しており、値が小さいほど感度が良いことを表わす。
図5に示すように、パチニ小体は、100乃至400Hz付近の領域において良好な感度を示し、特に150乃至300Hzにおいてさらに良好な感度を示す。
このような領域は、一般に人間の可聴域とされる20Hz乃至20kHzの範囲に含まれる。
加振波形の卓越周波数は、一例として250Hzに設定することができる。
微分演算部120は、電動パワーステアリング制御ユニット90から、舵角センサ71が検出した車輪Wの舵角θに関する情報を取得し、時間微分した微分値Δθを算出するものである。
微分演算部120は、算出された微分値Δθを、第1ゲイン調整部130に逐次伝達する。
微分演算部120は、算出された微分値Δθを、第1ゲイン調整部130に逐次伝達する。
第1ゲイン調整部130は、波形生成部110が発生する加振波形の基本波に対して、以下説明する第1のゲイン調整を行うものである。
第1のゲイン調整は、操舵装置の舵角θ(操舵量に相関するパラメータ)の微分値(時間あたり変化率)に応じて、加振波形の電圧に乗算される出力ゲインであるゲインG1を変化させるものである。
第1のゲイン調整は、操舵装置の舵角θ(操舵量に相関するパラメータ)の微分値(時間あたり変化率)に応じて、加振波形の電圧に乗算される出力ゲインであるゲインG1を変化させるものである。
図6は、第1ゲイン調整部におけるゲイン調整の一例を模式的に示す図である。
図6において、横軸は車輪FWの舵角θの微分値Δθの絶対値を示し、縦軸は加振波形の電圧に乗算されるゲインG1を示している。
ゲインG1は、微分値Δθの絶対値の増加に応じて増加する構成とすることができる。
また、第1ゲイン調整部130における微分値Δθの絶対値の増加に対するゲインG1の増加率は、微分値Δθの絶対値が微小な領域において最大となるとともに、微分値Δθの絶対値の増加に応じて減少する構成とすることができる。
図6において、横軸は車輪FWの舵角θの微分値Δθの絶対値を示し、縦軸は加振波形の電圧に乗算されるゲインG1を示している。
ゲインG1は、微分値Δθの絶対値の増加に応じて増加する構成とすることができる。
また、第1ゲイン調整部130における微分値Δθの絶対値の増加に対するゲインG1の増加率は、微分値Δθの絶対値が微小な領域において最大となるとともに、微分値Δθの絶対値の増加に応じて減少する構成とすることができる。
第1ゲイン調整部130におけるゲインG1は、例えば、舵角θの微分値Δθの絶対値から、対数関数を用いて算出することができる。
ゲインG1は、例えば、以下の式1によって表される。
ゲインG1=log(舵角微分値Δθの絶対値×係数k) (式1)
係数kは、車両の特性(例えば、舵角θに対するヨーゲイン、重心位置等)に合わせて、例えば車両の開発段階で設定した値とすることができる。
ゲインG1は、例えば、以下の式1によって表される。
ゲインG1=log(舵角微分値Δθの絶対値×係数k) (式1)
係数kは、車両の特性(例えば、舵角θに対するヨーゲイン、重心位置等)に合わせて、例えば車両の開発段階で設定した値とすることができる。
マイクロフォン140は、車室内に設けられ、車室内の暗騒音を採取する集音装置である。
マイクロフォン140は、乗員の耳元に近い位置に配置することが好ましく、例えば、シートのヘッドレスト部に設ける構成とすることができる。
マイクロフォン140の出力は、センシング値演算部150へ伝達される。
マイクロフォン140は、乗員の耳元に近い位置に配置することが好ましく、例えば、シートのヘッドレスト部に設ける構成とすることができる。
マイクロフォン140の出力は、センシング値演算部150へ伝達される。
センシング値演算部150は、マイクロフォン140が取得した車両の暗騒音から、所定の周波数帯域の成分を抽出し、抽出された成分の音圧をセンシング値として第2ゲイン調整部160に伝達するものである。
図7は、マイクロフォンの出力履歴の一例を模式的に示す図である。
図7において、横軸は時間を示し、縦軸はマイクロフォン140が取得した暗騒音の音圧を示している。
図7は、マイクロフォンの出力履歴の一例を模式的に示す図である。
図7において、横軸は時間を示し、縦軸はマイクロフォン140が取得した暗騒音の音圧を示している。
センシング値演算部150は、マイクロフォン140が取得した暗騒音の音響信号に対して高速フーリエ変換(FFT)処理を施して周波数領域に変換し、さらに、バンドパスフィルタ処理を施して所定の周波数帯域の成分を抽出する。
抽出する周波数帯域は、波形生成部110が出力する加振波形の卓越周波数を含むよう設定される。
センシング値演算部150は、抽出された周波数帯域の平均音圧を、第2のゲイン調整に用いるセンシング値とする。
抽出する周波数帯域は、波形生成部110が出力する加振波形の卓越周波数を含むよう設定される。
センシング値演算部150は、抽出された周波数帯域の平均音圧を、第2のゲイン調整に用いるセンシング値とする。
図8は、暗騒音の音圧の周波数との相関の一例を示す図である。
図8において、横軸は周波数を示し、縦軸は音圧を示している。
バンドパスフィルタは、例えば、波形生成部110における加振波形の卓越周波数(一例として250Hz)近傍の周波数帯域を抽出する構成とすることができる。
抽出された周波数帯域における音圧(一例として周波数帯域の平均値)は、第2ゲイン調整部160にセンシング値として提供される。
図8において、横軸は周波数を示し、縦軸は音圧を示している。
バンドパスフィルタは、例えば、波形生成部110における加振波形の卓越周波数(一例として250Hz)近傍の周波数帯域を抽出する構成とすることができる。
抽出された周波数帯域における音圧(一例として周波数帯域の平均値)は、第2ゲイン調整部160にセンシング値として提供される。
第2ゲイン調整部160は、第1のゲイン調整後の加振波形に対して、さらに以下説明する第2のゲイン調整を行うものである。
第2のゲイン調整は、車両の走行時の暗騒音(駆動系騒音、空力騒音、ロードノイズ等)の変化に応じて加振波形の出力振幅を調節するため、車室内騒音のセンシング値に応じて、加振波形のゲインを変化させるものである。
第2ゲイン調整部160は、センシング値演算部150の出力に基づいて、第2のゲイン調整を行う。
第2のゲイン調整は、車両の走行時の暗騒音(駆動系騒音、空力騒音、ロードノイズ等)の変化に応じて加振波形の出力振幅を調節するため、車室内騒音のセンシング値に応じて、加振波形のゲインを変化させるものである。
第2ゲイン調整部160は、センシング値演算部150の出力に基づいて、第2のゲイン調整を行う。
第2ゲイン調整部160は、センシング値演算部150が出力するセンシング値に基づいて、ゲインG2の設定を行う。
図9は、第2ゲイン調整部におけるゲイン調整の一例を模式的に示す図である。
図9において、横軸はセンシング値を示し、縦軸は加振波形の電圧に乗算されるゲインG2を示している。
ゲインG2は、センシング値の増加に応じて増加する構成することができる。
ゲインG2は、乗員の耳元における暗騒音の音圧に対して、スピーカ170から出力される加振振幅による音響の音圧が卓越しないように設定される。
好ましくは、加振振幅による音響が車両の暗騒音に潜り込み、乗員が無意識に聴取可能な音圧レベルとなるように、ゲインG2を設定するとよい。
図9は、第2ゲイン調整部におけるゲイン調整の一例を模式的に示す図である。
図9において、横軸はセンシング値を示し、縦軸は加振波形の電圧に乗算されるゲインG2を示している。
ゲインG2は、センシング値の増加に応じて増加する構成することができる。
ゲインG2は、乗員の耳元における暗騒音の音圧に対して、スピーカ170から出力される加振振幅による音響の音圧が卓越しないように設定される。
好ましくは、加振振幅による音響が車両の暗騒音に潜り込み、乗員が無意識に聴取可能な音圧レベルとなるように、ゲインG2を設定するとよい。
以上説明した第1のゲイン調整、第2のゲイン調整後の加振波形の出力値(電圧)Aは、式2のように表される。
出力値A=波形生成部出力値×ゲインG1×ゲインG2
=波形生成部出力値×log(舵角微分値Δθの絶対値×係数k)
×ゲインG2(式2)
出力値A=波形生成部出力値×ゲインG1×ゲインG2
=波形生成部出力値×log(舵角微分値Δθの絶対値×係数k)
×ゲインG2(式2)
スピーカ170は、車室内に配置され、出力値Aを用いて、車室内の乗員の周囲の空気を加振し、音響を発生させる加振装置である。
スピーカ170の配置に関しては、後に詳しく説明する。
スピーカ170は、例えば、車載オーディオ装置の音声再生などに用いられるスピーカと共用する構成としてもよい。
また、情報伝達装置100専用のスピーカ170を設けてもよい。
スピーカ170の配置に関しては、後に詳しく説明する。
スピーカ170は、例えば、車載オーディオ装置の音声再生などに用いられるスピーカと共用する構成としてもよい。
また、情報伝達装置100専用のスピーカ170を設けてもよい。
図10は、第1実施形態の情報伝達装置が設けられる車両の車室内の配置を模式的に示す図である。
車室200の内部には、運転席210、助手席220、後席230、インストルメントパネル240等が設けられている。
車室200の内部には、運転席210、助手席220、後席230、インストルメントパネル240等が設けられている。
運転席210、助手席220は、車室前方に設けられた前席である。
運転席210、助手席220は、車幅方向に並列して設けられている。
図10に示す例では、車両は一例としていわゆる右ハンドル車であり、車体左右中心に対して運転席210は右側、助手席220は左側に設けられている。
運転席210、助手席220は、乗員の臀部及び大腿部が載置されるクッション部、乗員の背部後方に配置されるシートバック部、乗員の頭部後方に設けられるヘッドレスト部をそれぞれ有する。
運転席210、助手席220は、車幅方向に並列して設けられている。
図10に示す例では、車両は一例としていわゆる右ハンドル車であり、車体左右中心に対して運転席210は右側、助手席220は左側に設けられている。
運転席210、助手席220は、乗員の臀部及び大腿部が載置されるクッション部、乗員の背部後方に配置されるシートバック部、乗員の頭部後方に設けられるヘッドレスト部をそれぞれ有する。
後席230は、運転席210、助手席220の後方に配置されたベンチ状のシートである。
後席230は、例えば2名の乗員が横並びに着座可能となっている。
後席230は、乗員の臀部及び大腿部が載置されるクッション部、乗員の背部後方に配置されるシートバック部、乗員の頭部後方に設けられるヘッドレスト部を有する。
後席230における右側着座部は運転席210の後方に配置され、左側着座部は助手席220の後方に配置されている。
後席230は、例えば2名の乗員が横並びに着座可能となっている。
後席230は、乗員の臀部及び大腿部が載置されるクッション部、乗員の背部後方に配置されるシートバック部、乗員の頭部後方に設けられるヘッドレスト部を有する。
後席230における右側着座部は運転席210の後方に配置され、左側着座部は助手席220の後方に配置されている。
インストルメントパネル240は、車室200の前端部近傍に設けられ、例えば計器盤、換気空調暖房装置、インフォテイメント装置などが収容される部材である。
インストルメントパネル240は、運転席210、助手席220に着座した乗員に対向するよう配置されている。
インストルメントパネル240は、運転席210、助手席220に着座した乗員に対向するよう配置されている。
図10に示す例においては、スピーカ170は、例えば、車室200の前後左右に離間して例えば4個設けられる。
以下、各スピーカ170の符号には、位置に対応した添え字を付して説明する。
以下、各スピーカ170の符号には、位置に対応した添え字を付して説明する。
右前方のスピーカ170FRは、インストルメントパネル240の右側端部近傍に配置されている。
スピーカ170FRは、運転席210に着座した乗員の頭部(耳部)を指向する指向性スピーカである。
左前方のスピーカ170FLは、インストルメントパネル240の左側端部近傍に配置されている。
スピーカ170FLは、助手席220に着座した乗員の頭部(耳部)を指向する指向性スピーカである。
スピーカ170FRは、運転席210に着座した乗員の頭部(耳部)を指向する指向性スピーカである。
左前方のスピーカ170FLは、インストルメントパネル240の左側端部近傍に配置されている。
スピーカ170FLは、助手席220に着座した乗員の頭部(耳部)を指向する指向性スピーカである。
右後方のスピーカ170RRは、運転席210のヘッドレスト部に配置されている。
スピーカ170RRは、後席230の右側に着座した乗員の頭部(耳部)を指向する指向性スピーカである。
左後方のスピーカ170RLは、助手席220のヘッドレスト部に配置されている。
スピーカ170RLは、後席230の左側に着座した乗員の頭部(耳部)を指向する指向性スピーカである。
スピーカ170RRは、後席230の右側に着座した乗員の頭部(耳部)を指向する指向性スピーカである。
左後方のスピーカ170RLは、助手席220のヘッドレスト部に配置されている。
スピーカ170RLは、後席230の左側に着座した乗員の頭部(耳部)を指向する指向性スピーカである。
第1実施形態においては、上記構成により、ドライバが操舵操作を行って車輪Wの舵角θの変化が生じた際に、スピーカ170から舵角θの微分値Δθに応じた振幅の音響が乗員に対して発せられる。
この音響は、車両の走行音(暗騒音)にマスクされることから、乗員が意識的に音として認識し難いものであるが、無意識下に乗員に対して横加速度やヨーレートの発生を伴う車両挙動が発生することを予見させることができる。
この音響は、車両の走行音(暗騒音)にマスクされることから、乗員が意識的に音として認識し難いものであるが、無意識下に乗員に対して横加速度やヨーレートの発生を伴う車両挙動が発生することを予見させることができる。
以上説明した第1実施形態によれば、以下の効果を得ることができる。
(1)操舵装置による車輪Wの舵角θの微分値Δθの絶対値の増加に応じて音圧が増大する音響を発生させることにより、操舵の初期に、車両に実際に横加速度、ヨーレート、ロール角等が発生することに先立ち、音響によって乗員に挙動が発生することを予見させることができる。
これにより、乗員の車両挙動に対する予見性が向上し、乗員が車両の挙動に対して唐突感を受けることを防止できる。
このため、乗員は加速度等の発生に先立って身体に力を入れるなどして備えることができ、意図せず着座姿勢が崩れること等を防止できる。
(2)加振波形が100乃至400Hz、より好ましくは150乃至300Hzの周波数帯域に含まれる卓越周波数を有することにより、可聴域かつ皮膚感覚で感度の高いパチニ小体等を用いることが可能となり、乗員の音響による音の感知と皮膚感覚の認知が良好になる。このため、乗員により確実に情報を伝達することができる。
(3)舵角θの微分値Δθの絶対値から対数関数を用いてゲインG1を設定することにより、微分値Δθの絶対値が比較的小さい領域においても大きいゲインG1を設定することが可能となり、舵角θ及び微分値(操舵速度)Δθが微小である操舵初期においても乗員に適切に情報を伝達することができる。
また、微分値Δθの絶対値が大きい領域において、出力ゲインが過度に大きくなることを防止できる。
(4)スピーカ170の加振により生じる音圧が、少なくとも一人の乗員の耳元で、車両の走行時における暗騒音に対して卓越しないようゲインG2を設定することにより、スピーカ170の加振により生じる音響が車両の暗騒音に埋没することにより、乗員に耳障りであると感じさせることを防止し、かつ、情報を適切に伝達することができる。
(5)車輪Wの舵角θを操舵装置の操舵量に相関するパラメータとして利用することにより、一般的な車両であれば通常設けられる舵角センサを用いて、パラメータを容易かつ適切に取得することができる。
(1)操舵装置による車輪Wの舵角θの微分値Δθの絶対値の増加に応じて音圧が増大する音響を発生させることにより、操舵の初期に、車両に実際に横加速度、ヨーレート、ロール角等が発生することに先立ち、音響によって乗員に挙動が発生することを予見させることができる。
これにより、乗員の車両挙動に対する予見性が向上し、乗員が車両の挙動に対して唐突感を受けることを防止できる。
このため、乗員は加速度等の発生に先立って身体に力を入れるなどして備えることができ、意図せず着座姿勢が崩れること等を防止できる。
(2)加振波形が100乃至400Hz、より好ましくは150乃至300Hzの周波数帯域に含まれる卓越周波数を有することにより、可聴域かつ皮膚感覚で感度の高いパチニ小体等を用いることが可能となり、乗員の音響による音の感知と皮膚感覚の認知が良好になる。このため、乗員により確実に情報を伝達することができる。
(3)舵角θの微分値Δθの絶対値から対数関数を用いてゲインG1を設定することにより、微分値Δθの絶対値が比較的小さい領域においても大きいゲインG1を設定することが可能となり、舵角θ及び微分値(操舵速度)Δθが微小である操舵初期においても乗員に適切に情報を伝達することができる。
また、微分値Δθの絶対値が大きい領域において、出力ゲインが過度に大きくなることを防止できる。
(4)スピーカ170の加振により生じる音圧が、少なくとも一人の乗員の耳元で、車両の走行時における暗騒音に対して卓越しないようゲインG2を設定することにより、スピーカ170の加振により生じる音響が車両の暗騒音に埋没することにより、乗員に耳障りであると感じさせることを防止し、かつ、情報を適切に伝達することができる。
(5)車輪Wの舵角θを操舵装置の操舵量に相関するパラメータとして利用することにより、一般的な車両であれば通常設けられる舵角センサを用いて、パラメータを容易かつ適切に取得することができる。
<第2実施形態>
次に、本発明を適用した情報伝達装置の第2実施形態について説明する。
第2実施形態において、車両は、ドライバの運転操作に依存せず自立的に操舵操作、加減速操作等を行う自動運転機能を備えている。
次に、本発明を適用した情報伝達装置の第2実施形態について説明する。
第2実施形態において、車両は、ドライバの運転操作に依存せず自立的に操舵操作、加減速操作等を行う自動運転機能を備えている。
図11は、第2実施形態の情報伝達装置が設けられる車両の自動運転システムの構成を模式的に示す図である。
自動運転システム300は、上述した電動パワーステアリング制御ユニット90に加え、さらに自動運転制御ユニット310、エンジン制御ユニット320、トランスミッション制御ユニット330、ブレーキ制御ユニット340等を有する。
これらの各ユニットは、それぞれCPU等の情報処理部、RAMやROMなどの記憶部、入出力インターフェイス、及び、これらを接続するバス等を有するマイコンを備える。
また、各ユニットは、例えばCAN通信システムなどの車載LANを介して、あるいは直接に接続され、相互に通信を行うことが可能となっている。
自動運転システム300は、上述した電動パワーステアリング制御ユニット90に加え、さらに自動運転制御ユニット310、エンジン制御ユニット320、トランスミッション制御ユニット330、ブレーキ制御ユニット340等を有する。
これらの各ユニットは、それぞれCPU等の情報処理部、RAMやROMなどの記憶部、入出力インターフェイス、及び、これらを接続するバス等を有するマイコンを備える。
また、各ユニットは、例えばCAN通信システムなどの車載LANを介して、あるいは直接に接続され、相互に通信を行うことが可能となっている。
自動運転制御ユニット310は、例えば、ステレオカメラ装置、ミリ波レーダ装置、レーザスキャナ装置などの各種センサや、高精度3Dマップ等を用いて自車両周辺の環境を認識する。
自動運転制御ユニット310は、認識された環境に基づいて、自車両の走行ライン、速度などに関する情報を含む自動運転シナリオを生成する。
自動運転制御ユニット310は、自動運転シナリオに基づいて、電動パワーステアリング制御ユニット90、エンジン制御ユニット320、トランスミッション制御ユニット330、ブレーキ制御ユニット340に指示を与え、車両の操向及び加減速を制御する。
自動運転制御ユニット310は、認識された環境に基づいて、自車両の走行ライン、速度などに関する情報を含む自動運転シナリオを生成する。
自動運転制御ユニット310は、自動運転シナリオに基づいて、電動パワーステアリング制御ユニット90、エンジン制御ユニット320、トランスミッション制御ユニット330、ブレーキ制御ユニット340に指示を与え、車両の操向及び加減速を制御する。
電動パワーステアリング制御ユニット90は、第1実施形態のようなドライバからの操舵入力に代えて、自動運転制御ユニット310から指示される要求舵角に応じてアクチュエータユニット80を制御し、車輪Wの操向を行う。
エンジン制御ユニット320は、車両の走行用動力源であるエンジン及びその補機類を統括的に制御するものである。
エンジン制御ユニット320は、自動運転制御ユニット310から指示される要求トルクに、エンジンが実際に発生するトルクが一致するよう、エンジンの出力を制御する。
エンジン制御ユニット320は、自動運転制御ユニット310から指示される要求トルクに、エンジンが実際に発生するトルクが一致するよう、エンジンの出力を制御する。
トランスミッション制御ユニット330は、エンジンの出力軸の回転を変速(減速又は増速)するトランスミッション及びその補機類を統括的に制御するものである。
トランスミッション制御ユニット330は、自動運転制御ユニット310からの指示に応じて、走行レンジと非走行レンジとの切り替え、前後進の切り替え、前進時における変速(変速比の変更)などを行う。
トランスミッション制御ユニット330は、自動運転制御ユニット310からの指示に応じて、走行レンジと非走行レンジとの切り替え、前後進の切り替え、前進時における変速(変速比の変更)などを行う。
ブレーキ制御ユニット340は、車両の各車輪に設けられる液圧式サービスブレーキの制動力を制御するものである。
ブレーキ制御ユニット340は、自動運転制御ユニット310から指示される要求制動力に応じて、各車輪のホイルシリンダに供給されるブレーキフルード液圧を調節し、必要な制動力を発生させる。
ブレーキ制御ユニット340は、自動運転制御ユニット310から指示される要求制動力に応じて、各車輪のホイルシリンダに供給されるブレーキフルード液圧を調節し、必要な制動力を発生させる。
第2実施形態においては、基本的にドライバが操舵操作を行わない自動運転時であっても、自動運転制御ユニット310から電動パワーステアリング制御ユニット90に伝達される要求舵角を、情報伝達装置100の入力(操舵装置の舵角に相関するパラメータ)とし、その微分値に基づいて第1のゲイン調整を行う。
以上説明した第2実施形態によれば、自動運転を行う車両においても、自動運転制御による操舵の開始時に、舵角の微分値の絶対値に応じた音響の発生が行われることにより、乗員に対して横加速度、ヨーレート、ロール角等の発生を伴う車両挙動の発生を予見させることが可能となり、乗員が車両の挙動に対して唐突感を受けることを防止できる。
以上説明した第2実施形態によれば、自動運転を行う車両においても、自動運転制御による操舵の開始時に、舵角の微分値の絶対値に応じた音響の発生が行われることにより、乗員に対して横加速度、ヨーレート、ロール角等の発生を伴う車両挙動の発生を予見させることが可能となり、乗員が車両の挙動に対して唐突感を受けることを防止できる。
(変形例)
本発明は、以上説明した実施形態に限定されることなく、種々の変形や変更が可能であって、それらも本発明の技術的範囲内である。
(1)情報伝達装置及び車両の構成は、上述した各実施形態に限定されず、適宜変更することが可能である。
例えば、情報伝達装置のハードウェア構成や、加振波形のゲイン調整の具体的手法は、各実施形態の構成に限らず、適宜変更することができる。
(2)各実施形態において、操舵装置の操舵量に相関するパラメータとして例えば舵角(舵角センサにより検出される実舵角、又は、自動運転制御における要求舵角)を用いているが、当該パラメータはこれに限らず、適宜変更することができる。
例えば、ドライバから入力される操舵トルク(入力トルク)や、車輪を操舵するアクチュエータの作動量(一例としてモータの回転量)、当該アクチュエータへの出力指示値などの少なくとも一つを有する構成とすることができる。
(3)本発明は、各実施形態のようにステアリングホイール等の操作部材とステアリングギヤボックス等の操舵機構部とが機械的に連結されたものに限らず、ステアリングホイール等と操舵機構部とが機械的に連結されていないステアバイワイヤ式の操舵装置を有する車両にも適用することができる。この場合、操舵装置の操舵量に相関するパラメータとして、前輪の実舵角や、操舵機構部の状態(一例としてピニオンギヤの回転角度位置やラック軸の移動量等)を用いることができる。
(4)各実施形態では、車両の暗騒音のレベルを一例としてマイクロフォンによって取得しているが、これに限らず、他の手法により暗騒音のレベルを取得してもよい。例えば、路面からの入力と相関する車両のばね下部分の加速度や、操舵装置のトルクセンサの出力値(トーションバートルク)に基づいて暗騒音のレベルを推定してもよい。
本発明は、以上説明した実施形態に限定されることなく、種々の変形や変更が可能であって、それらも本発明の技術的範囲内である。
(1)情報伝達装置及び車両の構成は、上述した各実施形態に限定されず、適宜変更することが可能である。
例えば、情報伝達装置のハードウェア構成や、加振波形のゲイン調整の具体的手法は、各実施形態の構成に限らず、適宜変更することができる。
(2)各実施形態において、操舵装置の操舵量に相関するパラメータとして例えば舵角(舵角センサにより検出される実舵角、又は、自動運転制御における要求舵角)を用いているが、当該パラメータはこれに限らず、適宜変更することができる。
例えば、ドライバから入力される操舵トルク(入力トルク)や、車輪を操舵するアクチュエータの作動量(一例としてモータの回転量)、当該アクチュエータへの出力指示値などの少なくとも一つを有する構成とすることができる。
(3)本発明は、各実施形態のようにステアリングホイール等の操作部材とステアリングギヤボックス等の操舵機構部とが機械的に連結されたものに限らず、ステアリングホイール等と操舵機構部とが機械的に連結されていないステアバイワイヤ式の操舵装置を有する車両にも適用することができる。この場合、操舵装置の操舵量に相関するパラメータとして、前輪の実舵角や、操舵機構部の状態(一例としてピニオンギヤの回転角度位置やラック軸の移動量等)を用いることができる。
(4)各実施形態では、車両の暗騒音のレベルを一例としてマイクロフォンによって取得しているが、これに限らず、他の手法により暗騒音のレベルを取得してもよい。例えば、路面からの入力と相関する車両のばね下部分の加速度や、操舵装置のトルクセンサの出力値(トーションバートルク)に基づいて暗騒音のレベルを推定してもよい。
1 電動パワーステアリング装置 W 車輪
10 ステアリングホイール 20 ステアリングシャフト
21 インターミディエートシャフト 22 ピニオンシャフト
23,24 ユニバーサルジョイント
30 ラック軸 31 ラックギヤ
40 ラックハウジング 41 ラックブーツ
50 タイロッド 51,52 ボールジョイント
60 ハウジング
71 舵角センサ 72 トルクセンサ
80 アクチュエータユニット 81 モータ
82 ギヤボックス
90 電動パワーステアリング制御ユニット
100 情報伝達装置 110 波形生成部
120 微分演算部 130 第1ゲイン調整部
140 マイクロフォン 150 センシング値演算部
160 第2ゲイン調整部
170(170FR,170FL,170RR,170RL) スピーカ
200 車室 210 運転席
220 助手席 230 後席
240 インストルメントパネル
300 自動運転システム 310 自動運転制御ユニット
320 エンジン制御ユニット 330 トランスミッション制御ユニット
340 ブレーキ制御ユニット
10 ステアリングホイール 20 ステアリングシャフト
21 インターミディエートシャフト 22 ピニオンシャフト
23,24 ユニバーサルジョイント
30 ラック軸 31 ラックギヤ
40 ラックハウジング 41 ラックブーツ
50 タイロッド 51,52 ボールジョイント
60 ハウジング
71 舵角センサ 72 トルクセンサ
80 アクチュエータユニット 81 モータ
82 ギヤボックス
90 電動パワーステアリング制御ユニット
100 情報伝達装置 110 波形生成部
120 微分演算部 130 第1ゲイン調整部
140 マイクロフォン 150 センシング値演算部
160 第2ゲイン調整部
170(170FR,170FL,170RR,170RL) スピーカ
200 車室 210 運転席
220 助手席 230 後席
240 インストルメントパネル
300 自動運転システム 310 自動運転制御ユニット
320 エンジン制御ユニット 330 トランスミッション制御ユニット
340 ブレーキ制御ユニット
Claims (5)
- 車輪を操舵する操舵装置を有する車両に設けられる情報伝達装置であって、
前記操舵装置の操舵量に相関するパラメータを検出するパラメータ検出部と、
加振波形を生成する加振波形生成部と、
前記加振波形を用いて乗員の周囲の空気を加振する加振部と、
前記加振波形の出力ゲインを前記パラメータの微分値の絶対値の増加に応じて増加させるゲイン調整部と
を備えることを特徴とする情報伝達装置。 - 前記加振波形は100乃至400Hzの周波数帯域に含まれる卓越周波数を有すること
を特徴とする請求項1に記載の情報伝達装置。 - 前記ゲイン調整部における前記微分値の絶対値の増加に対する前記出力ゲインの増加率は、前記微分値の絶対値が微小な領域において最大となるとともに、前記微分値の絶対値の増加に応じて減少すること
を特徴とする請求項1又は請求項2に記載の情報伝達装置。 - 前記ゲイン調整部は、前記加振部の前記加振により生じる音圧が、少なくとも一人の乗員の耳元で、前記車両の走行時における暗騒音に対して卓越しないよう前記出力ゲインを設定すること
を特徴とする請求項1又は請求項2に記載の情報伝達装置。 - 前記パラメータは、前記操舵装置の舵角、前記操舵装置への入力トルク、前記車輪を操舵するアクチュエータの作動量、前記アクチュエータへの出力指示値の少なくとも一つを含むこと
を特徴とする請求項1又は請求項2に記載の情報伝達装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022-188852 | 2022-11-28 | ||
| JP2022188852 | 2022-11-28 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024116465A1 true WO2024116465A1 (ja) | 2024-06-06 |
Family
ID=91323253
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/027929 WO2024116465A1 (ja) | 2022-11-28 | 2023-07-31 | 情報伝達装置 |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2024116465A1 (ja) |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07215144A (ja) * | 1994-02-04 | 1995-08-15 | Mitsubishi Motors Corp | 操舵系加振式車両用警告装置 |
| JP2006298166A (ja) * | 2005-04-20 | 2006-11-02 | Honda Motor Co Ltd | 車両状態伝達装置 |
| JP2007062706A (ja) * | 2005-08-05 | 2007-03-15 | Nissan Motor Co Ltd | 運転支援装置および運転支援方法 |
| JP2008162466A (ja) * | 2006-12-28 | 2008-07-17 | Toyoda Gosei Co Ltd | ステアリングホイール |
| JP2008265613A (ja) * | 2007-04-23 | 2008-11-06 | Jtekt Corp | 電動パワーステアリング装置 |
| JP2010083245A (ja) * | 2008-09-30 | 2010-04-15 | Denso Corp | 計器用警報装置 |
| JP2012006534A (ja) * | 2010-06-28 | 2012-01-12 | Nissan Motor Co Ltd | 車両の走行支援装置及び走行支援方法 |
| JP2017144779A (ja) * | 2016-02-15 | 2017-08-24 | 株式会社ジェイテクト | 車両用警報装置 |
| WO2018230443A1 (ja) * | 2017-06-12 | 2018-12-20 | 株式会社バンダイナムコエンターテインメント | シミュレーションシステム、画像処理方法及び情報記憶媒体 |
| JP2019202591A (ja) * | 2018-05-22 | 2019-11-28 | マツダ株式会社 | ステアリング装置 |
| WO2020235306A1 (ja) * | 2019-05-17 | 2020-11-26 | 株式会社東海理化電機製作所 | 制御システムおよび提示システム |
| WO2022018926A1 (ja) * | 2020-07-22 | 2022-01-27 | 日本電産サンキョー株式会社 | 入力装置および入力装置の制御方法 |
-
2023
- 2023-07-31 WO PCT/JP2023/027929 patent/WO2024116465A1/ja unknown
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07215144A (ja) * | 1994-02-04 | 1995-08-15 | Mitsubishi Motors Corp | 操舵系加振式車両用警告装置 |
| JP2006298166A (ja) * | 2005-04-20 | 2006-11-02 | Honda Motor Co Ltd | 車両状態伝達装置 |
| JP2007062706A (ja) * | 2005-08-05 | 2007-03-15 | Nissan Motor Co Ltd | 運転支援装置および運転支援方法 |
| JP2008162466A (ja) * | 2006-12-28 | 2008-07-17 | Toyoda Gosei Co Ltd | ステアリングホイール |
| JP2008265613A (ja) * | 2007-04-23 | 2008-11-06 | Jtekt Corp | 電動パワーステアリング装置 |
| JP2010083245A (ja) * | 2008-09-30 | 2010-04-15 | Denso Corp | 計器用警報装置 |
| JP2012006534A (ja) * | 2010-06-28 | 2012-01-12 | Nissan Motor Co Ltd | 車両の走行支援装置及び走行支援方法 |
| JP2017144779A (ja) * | 2016-02-15 | 2017-08-24 | 株式会社ジェイテクト | 車両用警報装置 |
| WO2018230443A1 (ja) * | 2017-06-12 | 2018-12-20 | 株式会社バンダイナムコエンターテインメント | シミュレーションシステム、画像処理方法及び情報記憶媒体 |
| JP2019202591A (ja) * | 2018-05-22 | 2019-11-28 | マツダ株式会社 | ステアリング装置 |
| WO2020235306A1 (ja) * | 2019-05-17 | 2020-11-26 | 株式会社東海理化電機製作所 | 制御システムおよび提示システム |
| WO2022018926A1 (ja) * | 2020-07-22 | 2022-01-27 | 日本電産サンキョー株式会社 | 入力装置および入力装置の制御方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2576321B1 (en) | Steering system and steering control apparatus | |
| KR101641161B1 (ko) | 운전 지원 장치 및 운전 지원 방법 | |
| JP4619548B2 (ja) | かじ取り装置及びかじ取り方法 | |
| JP4166684B2 (ja) | 車両安定性向上システムのための方法及び装置 | |
| JP7319832B2 (ja) | ステアリング装置 | |
| JP5808977B2 (ja) | 車両のヨーモーメント発生旋回効率化装置 | |
| JP2003534195A (ja) | 車両の運転状態に関するフィードバックを運転者に提供する方法および装置 | |
| JP2006264624A (ja) | 車線維持支援装置 | |
| CN116118655B (zh) | 用于缓解晕动症的座舱数据优化方法及相关装置 | |
| JP7135380B2 (ja) | 車両用制御装置 | |
| WO2024116465A1 (ja) | 情報伝達装置 | |
| WO2024154252A1 (ja) | 情報伝達装置 | |
| JP2014215241A (ja) | 車両試験システム | |
| WO2024218847A1 (ja) | 情報提示装置 | |
| JPH0692159A (ja) | 運転感覚制御装置、人間運転特性同定方法および疑似感覚付与装置 | |
| US12122232B2 (en) | Accelerator pedal apparatus | |
| WO2024116466A1 (ja) | 情報伝達装置 | |
| JP7081263B2 (ja) | 車両用制御装置 | |
| JP4126990B2 (ja) | 車室内音制御装置 | |
| WO2022113426A1 (ja) | サスペンション制御装置、車両およびサスペンション制御方法 | |
| EP1740437B1 (en) | A vibration control device providing a desired vibration character in a steering wheel of a vehicle | |
| WO2024195027A1 (ja) | 情報提示装置 | |
| JP5004798B2 (ja) | 自動車の制御方法、自動車の制御装置及び自動車 | |
| JP2023151834A (ja) | 車両用シート | |
| WO2024195028A1 (ja) | 情報提示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23897125 Country of ref document: EP Kind code of ref document: A1 |