WO2024038558A1 - 搬送システム - Google Patents
搬送システム Download PDFInfo
- Publication number
- WO2024038558A1 WO2024038558A1 PCT/JP2022/031261 JP2022031261W WO2024038558A1 WO 2024038558 A1 WO2024038558 A1 WO 2024038558A1 JP 2022031261 W JP2022031261 W JP 2022031261W WO 2024038558 A1 WO2024038558 A1 WO 2024038558A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- conveyance
- transport
- unit
- conveyance path
- transport path
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images











Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/03—Synchronous motors; Motors moving step by step; Reluctance motors
- H02K41/031—Synchronous motors; Motors moving step by step; Reluctance motors of the permanent magnet type
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/02—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the kind of motor
- H02P25/06—Linear motors
- H02P25/064—Linear motors of the synchronous type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G43/00—Control devices, e.g. for safety, warning or fault-correcting
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G54/00—Non-mechanical conveyors not otherwise provided for
- B65G54/02—Non-mechanical conveyors not otherwise provided for electrostatic, electric, or magnetic
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/21—Devices for sensing speed or position, or actuated thereby
- H02K11/215—Magnetic effect devices, e.g. Hall-effect or magneto-resistive elements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N15/00—Holding or levitation devices using magnetic attraction or repulsion, not otherwise provided for
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/02—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the kind of motor
- H02P25/06—Linear motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2203/00—Indexing code relating to control or detection of the articles or the load carriers during conveying
- B65G2203/02—Control or detection
- B65G2203/0266—Control or detection relating to the load carrier(s)
- B65G2203/0283—Position of the load carrier
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2203/00—Indexing code relating to control or detection of the articles or the load carriers during conveying
- B65G2203/04—Detection means
- B65G2203/042—Sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2812/00—Indexing codes relating to the kind or type of conveyors
- B65G2812/99—Conveyor systems not otherwise provided for
Definitions
- the present disclosure relates to a conveyance system that conveys objects.
- a transportation system for transporting workpieces is generally used in production lines where factory automation is introduced, such as production lines for assembling industrial products or production lines for packaging food.
- factory automation is introduced
- production lines for assembling industrial products or production lines for packaging food In recent years, many transport systems have been used in which a transport path for transporting a workpiece is divided into a plurality of zones, and a trolley carrying the workpiece is driven by a control device disposed in each zone.
- Such a conveyance system is known as one of the conveyance systems excellent in terms of production efficiency.
- Some conveyance systems use a linear motor that includes a cart with magnets and a conveyance path with multiple coils.
- Some conveyance systems using linear motors control the current flowing through each coil using an inverter circuit such as a full-bridge inverter circuit or a half-bridge inverter circuit. In such a transport system, it is important to appropriately process the regenerated power generated by the coil when the truck decelerates, either by consuming or recovering it.
- Patent Document 1 discloses a conveyance system that includes a cart having a magnetic element and a conveyance path having a plurality of magnetic coil assemblies, and recovers regenerative energy in an energy storage assembly provided at one or more points on the conveyance path. system is disclosed.
- Patent Document 1 According to the technology disclosed in Patent Document 1, it is necessary to install an energy storage assembly at each point on the conveyance path where the truck decelerates. If the point at which the truck decelerates is indeterminate, energy storage assemblies would have to be installed at all points where the truck could decelerate. The more energy storage assemblies that need to be installed, the larger the transport system and the higher the cost of producing the transport system. Therefore, the conventional technology disclosed in Patent Document 1 has a problem in that it is difficult to appropriately process regenerated power.
- the present disclosure has been made in view of the above, and aims to provide a conveyance system that can appropriately process regenerated power.
- a conveyance system includes a plurality of conveyance path units that constitute a conveyance path along which a conveyance body moves, and each of which is connected to a common DC bus. Equipped with Each of the plurality of transport path units includes a drive unit that generates power for moving the transport body by supplying power from a DC bus. At least one of the one or more transport path units into which the transport body has not entered among the plurality of transport path units executes regenerative power supply that supplies regenerative power generated in the plurality of transport path units to the drive section.
- the conveyance system according to the present disclosure has the effect of being able to appropriately process regenerated power.
- a diagram showing a configuration example of a conveyance path unit according to a modification of the second embodiment A diagram showing a configuration example of a controller included in the transport system according to Embodiment 3.
- a diagram showing a configuration example of a learning device included in the controller of Embodiment 3 Flowchart showing the processing procedure of the learning device included in the controller of Embodiment 3 A diagram showing an example of the configuration of a position command generation unit included in the controller of Embodiment 3. Flowchart showing the processing procedure of the position command generation unit and the coil drive command generation unit included in the controller of Embodiment 3 A diagram showing a configuration example of a control circuit according to Embodiments 1 to 3. A diagram showing a configuration example of a dedicated hardware circuit according to Embodiments 1 to 3.
- FIG. 1 is a diagram showing a configuration example of a transport system 1 according to the first embodiment.
- the conveyance system 1 is a system used for conveying objects.
- the transport system 1 transports objects by moving a carrier on which the objects are placed.
- the transport system 1 includes a plurality of transport path units 11A, 11B, 11C, 11D, 11E, 11F, 11G, and 11H, a controller 12, a direct current (DC) power supply 13, and carts 16A, 16B, and 16C. Be prepared.
- the conveyance path unit 11 refers to each of the conveyance path units 11A, 11B, 11C, 11D, 11E, 11F, 11G, and 11H without distinction.
- the plurality of transport path units 11 are connected to each other and constitute a transport path 10 along which the transport body moves.
- the plurality of transport path units 11 move the transport bodies by applying power to the transport bodies.
- Each of the trolleys 16A, 16B, and 16C is a carrier. In the following description, the trolley 16 refers to each of the trolleys 16A, 16B, and 16C without distinction.
- the conveyance path 10 shown in FIG. 1 is annular. That is, the conveyance path 10 shown in FIG. 1 is a closed path.
- the transport path 10 of the transport system 1 may be an open path. That is, the conveyance path 10 of the conveyance system 1 may be a route having a starting point and an ending point.
- the conveyance path units 11A, 11B, 11E, and 11F are linear conveyance path units 11 that constitute a straight path.
- the conveyance path units 11C, 11D, 11G, and 11H are curved conveyance path units 11 forming a curved path, and change the traveling direction of the conveyance body.
- the conveyance path 10 may not include the conveyance path unit 11 that constitutes a straight path, but may consist only of conveyance path units 11 that constitute a curved path.
- the overall shape of the conveyance path 10 is assumed to be arbitrary.
- the trolley 16 is attached to the side of the conveyance path 10.
- the trolley 16 moves along guide rails provided on the side of the conveyance path 10.
- the trolley 16 moves on the side of the conveyance path 10 and stops on the side of the conveyance path 10.
- the conveyance system 1 is a moving magnet type linear motor.
- the trolley 16 may move along a guide rail provided on the upper surface of the transport path 10.
- the trolley 16 includes a permanent magnet that constitutes a movable element, a permanent magnet for a linear scale, and a guide roller that moves on a guide rail by rotation.
- FIG. 1 illustration of a guide rail, a guide roller, a permanent magnet constituting a mover, and a permanent magnet for a linear scale is omitted.
- the transport system 1 includes eight transport path units 11 and three carts 16. It is assumed that the number of transport path units 11 provided in the transport system 1 is arbitrary. That is, it is assumed that the number of conveyance path units 11 configuring the conveyance path 10 is arbitrary. The transport system 1 only needs to include a plurality of transport path units 11. It is assumed that the number of carts 16 moving on the conveyance path 10 is arbitrary. The transport system 1 only needs to include one or more carts 16.
- the conveyance system 1 is not limited to a system equipped with a linear motor, but may also be a system equipped with a rotary motor.
- the conveyance system 1 may be a belt conveyor including a rotary motor and a belt rotated by the rotary motor.
- the belt conveyor moves the workpieces placed on the belt.
- the conveyance system 1 may be a roller conveyor including a plurality of rollers and a rotary motor that rotates the rollers.
- a roller conveyor moves a workpiece placed on rollers.
- the DC power supply 13 is connected to each transport path unit 11 via a DC power supply bus 15.
- the DC power supply 13 is a power supply device or a power supply circuit that outputs a DC voltage.
- the DC power supply 13 supplies power to each transport path unit 11.
- Each transport path unit 11 shares the DC power supply 13.
- a DC bus on the positive side and a DC bus on the negative side are passed through the DC power bus 15.
- the DC bus on the positive electrode side is called a P bus.
- the DC bus on the negative electrode side is called the N bus.
- the P bus bar is connected to the positive electrode of the DC power supply 13.
- the N bus bar is connected to the negative electrode of the DC power supply 13.
- PN bus line when both the P bus line and the N bus line are referred to, they will be referred to as a PN bus line.
- Each of the plurality of transport path units 11 constituting the transport path 10 is connected to a common DC bus.
- the transport system 1 has a configuration in which each transport path unit 11 is connected to a DC power source 13 by a multi-drop connection.
- the connection form between each transport path unit 11 and the DC power supply 13 is not limited to multi-drop connection, but may be daisy chain connection.
- the number of DC power supplies 13 provided in the transport system 1 is one, but the number of DC power supplies 13 provided in the transport system 1 may be plural. That is, the transport system 1 may include a plurality of power domains.
- the controller 12 is connected to each transport path unit 11 via a data communication line 14.
- the controller 12 controls each of the plurality of transport path units 11.
- the data communication line 14 includes a line connecting the controller 12 and the transport path unit 11A, which is one of the plurality of transport path units 11, and a line connecting adjacent transport path units 11 to each other.
- the transport system 1 has a configuration in which each transport path unit 11 is connected to a controller 12 through a daisy chain connection.
- the connection form between each conveyance path unit 11 and the controller 12 is not limited to a daisy chain connection.
- the connection form between each transport path unit 11 and the controller 12 may be a star connection in which each transport path unit 11 is connected to the controller 12 via a communication hub.
- the transport system 1 may include a plurality of data communication lines 14, and each transport path unit 11 and the controller 12 may be directly connected via the data communication lines 14.
- the controller 12 generates a position command indicating the position to which the trolley 16 is to be moved, and generates a coil drive command based on the position command.
- the controller 12 outputs a coil drive command to each conveyance path unit 11.
- Each conveyance path unit 11 drives the coil of the conveyance path unit 11 according to a coil drive command.
- the controller 12 controls the movement of each cart 16 by outputting a coil drive command to each transport path unit 11.
- the coil drive command may be, for example, a current command, a speed command, a thrust command, or the like.
- the traveling direction of each truck 16 is the clockwise direction in FIG. 1 or the counterclockwise direction in FIG. 1.
- the clockwise direction in FIG. 1 is defined as the forward direction.
- the counterclockwise direction in FIG. 1 is the opposite direction.
- Arrow 17A represents the forward direction.
- Arrow 17B represents the opposite direction.
- a human-machine interface may be connected to the controller 12. Such a human-machine interface accepts input from an operator. The human-machine interface also outputs information indicating the status of the transport system 1 by display or the like.
- the controller 12 may acquire operation information of the trolley 16 from a higher-level control device or a human-machine interface, and may generate a position command based on the operation information.
- the operation information is information indicating a schedule for the movement of each of the plurality of carts 16 on the transport path 10.
- the configuration of the conveyance path unit 11 will be explained.
- the configuration of the conveyance path unit 11 will be explained using a linear conveyance path unit 11 as an example.
- the arrangement of the coils is different from that in the straight conveyance path unit 11.
- the configuration of the curved conveyance path unit 11 is similar to the configuration of the linear conveyance path unit 11 except that the arrangement of the coils is different.
- FIG. 2 is a diagram showing a configuration example of the transport path unit 11 provided in the transport system 1 according to the first embodiment.
- FIG. 2 shows the conveyance path unit 11 and permanent magnets 40 and 41 provided on the truck 16.
- Permanent magnet 40 is a permanent magnet that constitutes a movable element.
- the permanent magnet 41 is a permanent magnet for a linear scale.
- the conveyance path unit 11 includes a plurality of coils 20. Each coil 20 functions as a drive unit that generates power by supplying power from the PN bus. In the example shown in FIG. 2, the conveyance path unit 11 is equipped with nine coils 20. It is assumed that the number of coils 20 provided in the transport path unit 11 is arbitrary. In the linear conveyance path unit 11, the plurality of coils 20 are arranged in a linear direction. Note that in the curved conveyance path unit 11, the plurality of coils 20 are arranged in the direction of the curve.
- An inverter circuit 21 is connected to each coil 20 of the transport path unit 11.
- the inverter circuit 21 includes a switching element, and supplies power to the coil 20 through power conversion through switching of the switching element. Illustration of the switching elements is omitted.
- the inverter circuit 21 controls the current flowing through the coil 20.
- the inverter circuit 21 is a single-phase full-bridge inverter circuit or a single-phase half-bridge inverter circuit.
- the inverter circuit 21 may be a three-phase inverter circuit connected to the three coils 20.
- Each coil 20 of the conveyance path unit 11 includes not only a pure inductance component but also a coil resistance.
- Each inverter circuit 21 of the transport path unit 11 is connected between a P bus 31 that is the positive wiring of the DC power bus 15 and an N bus 32 that is the negative wiring of the DC power bus 15.
- Each inverter circuit 21 converts the DC power from the PN bus into AC power, and supplies the AC power to the coil 20.
- the inverter circuit 21 performs power conversion from DC power to AC power by switching switching elements.
- the coil 20 generates an electromagnetic force that becomes the motive power to move the trolley 16 by supplying electric power converted by the inverter circuit 21.
- a current sensor 22 is connected to each coil 20 of the conveyance path unit 11 .
- the current sensor 22 detects a coil actual current value, which is the current value of the current flowing through the coil 20.
- a capacitor 23 which is an electrolytic capacitor, is connected between the P bus bar 31 and the N bus bar 32.
- a current controller 24 that controls the inverter circuit 21 is connected to the inverter circuit 21 .
- the current controller 24 calculates the voltage value of the voltage applied to the coil 20 based on the current command value of the current flowing through the coil 20 and the actual coil current value detected by the current sensor 22.
- the current controller 24 transmits a pulse width modulation (PWM) signal obtained by comparing the calculated voltage value and the triangular wave to the inverter circuit 21 .
- the current controller 24 causes the inverter circuit 21 to perform switching by transmitting a PWM signal to the inverter circuit 21.
- the current controller 24 applies a voltage to the coil 20 to cause a current of a desired current value to flow through the coil 20.
- the current controller 24 controls the voltage value of the voltage applied to the coil 20 by performing PID (Proportional Integral Differential) control of the voltage applied to the coil 20 based on the deviation between the current command value and the coil actual current value. You can also calculate it.
- PID Proportional Integral Differential
- the conveyance path unit 11 includes a linear scale 25, a processor 27, and a bus voltage detection section 33.
- Bus voltage detection section 33 detects bus voltage.
- the bus voltage is the voltage of the PN bus, which is a DC bus, that is, the voltage between the P bus 31 and the N bus 32.
- the bus voltage detection unit 33 outputs the detection result of the bus voltage to the processor 27 .
- the linear scale 25 is a detection unit that detects the position of the trolley 16 on the conveyance path unit 11.
- the linear scale 25 is provided in the conveyance path 10 by connecting a plurality of conveyance path units 11 to each other to form the conveyance path 10.
- the processor 27 is a CPU (Central Processing Unit).
- the processor 27 may be an arithmetic unit, a processing unit, a microprocessor, a microcomputer, or a DSP (Digital Signal Processor).
- the linear scale 25 includes a plurality of position sensors 26.
- Each position sensor 26 is a sensor that detects a magnetic field, such as a Hall sensor or a magnetoresistive sensor.
- Each position sensor 26 detects the magnetic field of the permanent magnet 40 or the magnetic field of the permanent magnet 41.
- the position sensor 26 is a Hall sensor equipped with two Hall elements. The distance between the two Hall elements is equivalent to half the magnetic pole pitch of the permanent magnet 41.
- Each Hall element converts a magnetic field into an electrical signal and outputs the electrical signal.
- the electrical signals output by each Hall element change as the trolley 16 moves.
- the waveform of the electrical signal output by one of the Hall elements is a sine wave.
- the waveform of the electric signal output by the other Hall element is a cosine wave.
- An AD (Analog to Digital) converter provided in the processor 27 detects sine waves and cosine waves.
- the processor 27 detects the position of the cart 16 with respect to the position sensor 26 by calculating arctan based on the sine wave information and the cosine wave information. Thereby, the processor 27 acquires position information indicating the position of the trolley 16.
- the processor 27 acquires the bus voltage detection result from the bus voltage detection unit 33.
- the processor 27 controls the start of the regenerative power supply by the inverter circuit 21 and the stop of the regenerative power supply by the inverter circuit 21 .
- the regenerative power supply will be described later.
- the transport path unit 11 includes a communication slave station 28.
- the communication slave station 28 is a communication slave station on the conveyance path unit 11 side.
- Data communication line 14 is connected to communication slave station 28 .
- the communication slave station 28 is configured to be able to connect two data communication lines 14.
- the communication slave station 28 receives from the controller 12 a current command indicating a current command value of the current flowing through the coil 20 for each of the plurality of coils 20 provided in the transport path unit 11.
- the communication slave station 28 acquires the position information acquired by the processor 27 based on the output from each of the plurality of position sensors 26 provided in the linear scale 25 .
- the communication slave station 28 transmits the acquired position information to the controller 12.
- the communication slave station 28 for example, performs fixed-cycle communication in which it receives a current command and transmits position information at a fixed cycle. Instead of such fixed-period communication, the communication slave station 28 may receive the current command and transmit the position information aperiodically.
- the transport path unit 11 mainly has the function of controlling the energization of the coil 20 and the function of acquiring position information. All of the plurality of conveyance path units 11 constituting the conveyance path 10 perform energization control of the coil 20 in the same way, and acquire position information in the same way.
- the operation of the transport system 1 performed by sharing the PN bus will be explained.
- the cart 16A and the cart 16B are in a power running state, for example, a state in which they are accelerating.
- the trolley 16C is assumed to be in a regenerative state, for example, in a decelerating state. In such a state, if the regenerated power of the bogie 16C is smaller than the sum of the power running power of the bogie 16A and the power running power of the bogie 16B, the regenerated power is consumed as power running power, so the bus voltage increases due to the generation of regenerated power. is prevented.
- the bus voltage increases because the regenerative power generated in each of the carts 16A, 16B, and 16C is not consumed.
- the carts 16A, 16B, and 16C include a cart 16 in a power running state and a cart 16 in a regenerative state, and the regenerated power by the cart 16 in the regenerative state is greater than the power running power by the cart 16 in the power running state.
- the bus voltage increases. If the bus voltage increases excessively, it will adversely affect the life of the capacitor 23 or lead to damage to the capacitor 23. Therefore, the transport system 1 according to the first embodiment executes regeneration control that causes the plurality of transport path units 11 to consume regenerative power, as described below.
- one or more conveyance path units 11 among the plurality of conveyance path units 11 into which the trolley 16 has not entered are configured to supply regenerative power to the coil 20 with regenerative power generated in the plurality of conveyance path units 11. Execute.
- the first voltage threshold is a value of bus voltage that is used as a reference for starting regeneration control. The first voltage threshold is set in advance in each conveyance path unit 11 of the conveyance system 1.
- the conveyance path unit 11 that is executing the regenerative power supply stops the regenerative power supply when the bus voltage becomes equal to or lower than the second voltage threshold.
- the second voltage threshold is the value of the bus voltage that is used as a reference for stopping the regeneration control.
- the second voltage threshold is set in advance in each conveyance path unit 11 of the conveyance system 1.
- the conveyance path unit 11 into which the trolley 16 enters while executing the regenerative power supply stops the regenerative power supply. In this way, the transport path unit 11 stops supplying regenerative power when the bus voltage becomes equal to or lower than the second voltage threshold or when the trolley 16 enters the transport path unit 11.
- the cart 16A starts decelerating while the cart 16B and the cart 16C are stopped.
- the trolley 16B is stopped straddling the transport path unit 11C and the transport path unit 11D.
- the trolley 16C is stopped straddling the transport path unit 11E and the transport path unit 11F.
- the trolley 16A starts decelerating at the transport path unit 11A.
- FIG. 3 is a diagram for explaining regeneration control executed by the transport system 1 according to the first embodiment.
- FIG. 3 shows a time chart of the speed of the cart 16 on the conveyance path unit 11 in the regenerative state, the bus voltage Vpn, the regenerated power W1, and the regenerated power W2.
- the regenerated power W1 is the regenerated power supplied to the coil 20 of the conveyance path unit 11 where the trolley 16 is not present.
- the regenerated power W2 is the regenerated power supplied to the coil 20 of the transport path unit 11 where the trolley 16 is present.
- the speed of the truck 16 shown in FIG. 3 is the speed of the truck 16A.
- conveyance path units 11 in which the carts 16 are present are the respective conveyance path units 11A, 11C, 11D, 11E, and 11F.
- the transport path units 11 in which the trolley 16 is not present are transport path units 11B, 11G, and 11H.
- the voltage value Von is the first voltage threshold.
- the voltage value Voff is a second voltage threshold.
- the voltage value Von set for each conveyance path unit 11 of the conveyance system 1 is the same.
- the voltage value Voff set for each conveyance path unit 11 of the conveyance system 1 is the same.
- each transport path unit 11B, 11G, 11H in which the trolley 16 is not present causes the inverter circuit 21 to start supplying regenerative power.
- the regenerative power W1 supplied to the coil 20 of each conveyance path unit 11B, 11G, 11H starts rising from zero at time t2.
- the current controller 24 performs current control so that a current corresponding to the rated current of the coil 20 continues to flow through the coil 20.
- the current flowing through the coil 20 is converted into heat by the coil resistance.
- the regenerative power W1 is consumed in the coil 20 by converting the current into heat in the coil 20.
- the bus voltage Vpn gradually decreases from the voltage value Von. As shown in FIG. 3, it is assumed that the bus voltage Vpn decreases from the voltage value Von at time t2 and reaches the voltage value Voff at time t3.
- the processor 27 of each transport path unit 11B, 11G, 11H stops the regenerative power supply by the inverter circuit 21.
- regenerated power W1 starts increasing from time t2, is maintained at a constant amount, and starts decreasing from time t3. After that, regenerated power W1 becomes zero.
- each of the transport path units 11A, 11C, 11D, 11E, and 11F where the trolley 16 is present the trolley 16 is moved and stopped.
- the regenerative power W2 supplied to the coil 20 of each transport path unit 11A, 11C, 11D, 11E, and 11F remains at zero.
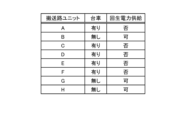
- FIG. 4 is a diagram for explaining the operation of each conveyance path unit 11 provided in the conveyance system 1 according to the first embodiment.
- FIG. 4 shows a table summarizing the presence or absence of the trolley 16 of each transport path unit 11 and whether regenerative power can be supplied to each transport path unit 11 in the case of the above example.
- "A", "B", . . . , "H” shown in the "transport path unit” column are transport path unit 11A, transport path unit 11B, ..., transport path unit 11H, respectively. represents.
- "Possible” shown in the column of "Regenerative power supply” indicates that regenerative power supply is executed.
- “No” shown in the “Regenerative power supply” column indicates that regenerative power supply is not performed.
- the processor 27 of the conveyance path unit 11 determines that the carriage 16 has not entered the conveyance path unit 11.
- the processor 27 determines that the carriage 16 is entering the conveyance path unit 11.
- each transport path unit 11B, 11G, 11H into which the truck 16 has not entered performs regenerative power supply.
- Each transport path unit 11A, 11C, 11D, 11E, 11F into which the trolley 16 has entered does not perform regenerative power supply.
- the transport system 1 prevents the bus voltage Vpn from excessively increasing beyond the voltage value Von by executing regenerative power supply in the transport path unit 11 into which the trolley 16 has not entered.
- the transport system 1 stops the regenerative power supply to each transport path unit 11 when the bus voltage Vpn in the transport path unit 11 that supplies regenerative power decreases to the voltage value Voff.
- the conveyance system 1 consumes regenerative power generated in the plurality of conveyance path units 11 through such regeneration control.
- the transport system 1 can prevent excessive rise in bus voltage Vpn.
- the voltage value Von set to each conveyance path unit 11 of the conveyance system 1 is assumed to be the same, but a plurality of conveyance path units 11 are set to different voltage values Von. They may also be included. An arbitrary voltage value Von can be individually set for each of the plurality of transport path units 11.
- each transport path unit 11 of the transport system 1 is the same, but a plurality of transport path units 11 are set to different voltage values Voff. They may also be included. An arbitrary voltage value Voff can be individually set for each of the plurality of transport path units 11.
- At least one of the first voltage threshold and the second voltage threshold may be individually set for each of the plurality of conveyance path units 11.
- the transport system 1 can arbitrarily set at least one of the first voltage threshold and the second voltage threshold depending on the mode of regenerative power supply desired to be realized by the transport path unit 11.
- the linear conveyance path unit 11 and the curved conveyance path unit 11 differ in the number of phases of the coil 20, the resistance value of the coil 20, or the size of the casing of the conveyance path unit 11. Therefore, for example, at least one of the first voltage threshold value and the second voltage threshold value may be set to a different value between the linear conveyance path unit 11 and the curved conveyance path unit 11. At least one of the first voltage threshold and the second voltage threshold is set individually for each of the plurality of transport path units 11, so that the transport system 1 can generate regenerative power suitable for the configuration of each transport path unit 11. Consumption can be realized.
- the first voltage threshold may be lower than that in the transport path unit 11 where the number of phases of the coil 20 is small.
- the transport system 1 can supply regenerative power preferentially to the transport path unit 11 having a large number of coil 20 phases.
- the number of phases of the coils 20 can also be said to be the number of coils 20 provided in one conveyance path unit 11.
- FIG. 2 illustrates a conveyance path unit 11 in which the number of phases of the coil 20 is nine.
- a power threshold which is the upper limit of the regenerative power W1 that is allowed to be supplied to the coil 20, is set in advance for each transport path unit 11 of the transport system 1.
- the power threshold values set for each transport path unit 11 of the transport system 1 are all the same.
- the transport path unit 11 in which the power supplied to the coil 20 exceeds a preset power threshold value stops the regenerative power supply.
- the power threshold can be set to, for example, I rate 2 ⁇ R coil .
- a value determined from the electronic thermal protection curve of each coil 20 may be set as the power threshold value.
- the power threshold value is not limited to these values, and any value can be set.
- the transport system 1 can prevent the regenerative power from being consumed due to overheating of the coil 20 by stopping the regenerative power supply in the transport path unit 11 where the power supplied to the coil 20 exceeds the power threshold.
- the power threshold values set for each transport path unit 11 of the transport system 1 are the same. May be included.
- An arbitrary power threshold value can be individually set for each of the plurality of transport path units 11.
- the transport system 1 can arbitrarily set the power threshold value depending on the mode of regenerative power supply desired to be realized by the transport path unit 11.
- the power threshold values may be set to different values for the linear conveyance path unit 11 and the curved conveyance path unit 11.
- the transport system 1 can realize regenerative power consumption suitable for the configuration of each transport path unit 11.
- the conveyance path unit 11A in which the truck 16 did not exist until the truck 16A enters stops supplying regenerative power when the truck 16A starts to enter the conveyance path unit 11H. In this way, the conveyance path units 11A and 11H switch between executing the regenerative power supply and stopping the regenerative power supply as the trolley 16A moves.
- the conveyance path units 11 other than the conveyance path units 11A and 11H also switch between execution of regenerative power supply and stopping of regenerative power supply as the trolleys 16B and 16C move.
- the transport system 1 consumes regenerative power generated by a plurality of transport path units 11 while continuing the movement of the trolley 16 by switching the transport path units 11 that supply regenerative power as the trolley 16 moves. can do.
- the inverter circuit 21 operates at a switching frequency lower than the switching frequency when powering the truck 16. In other words, the inverter circuit 21 operates at a frequency where the switching frequency at which the inverter circuit 21 is switched when supplying regenerative power is lower than the switching frequency at which the inverter circuit 21 is switched when providing power to the truck 16. do. Thereby, the conveyance path unit 11 can reduce noise caused by switching of the inverter circuit 21 when performing regenerative power supply.
- one or more transport path units 11 into which the transport body has not entered among the plurality of transport path units 11 execute regenerative power supply.
- the transport system 1 can consume regenerative power even if the point at which the transport body decelerates is indefinite. Thereby, the transport system 1 has the effect of being able to appropriately process regenerated power.
- Embodiment 2 among the transport path units 11 in which the cart 16 is not present, the transport path unit 11 adjacent to the transport path unit 11 in which the cart 16 is present is selected as the transport path unit 11 that performs regenerative power supply.
- the communication cycle is the cycle of communication between the controller 12 and the transport path unit 11.
- FIG. 5 is a diagram showing an example of the configuration of the transport system 2 according to the second embodiment.
- the processing by the controller 12 is different from that in the first embodiment.
- the configuration of the conveyance system 2 is similar to the configuration of the conveyance system 1 shown in FIG.
- the conveyance path unit 11 has a configuration similar to that shown in FIG. 2 .
- the transport system 2 includes eight transport path units 11 and two carts 16. It is assumed that the number of transport path units 11 provided in the transport system 2 is arbitrary. That is, it is assumed that the number of conveyance path units 11 configuring the conveyance path 10 is arbitrary. The transport system 2 only needs to include a plurality of transport path units 11. It is assumed that the number of carts 16 moving on the conveyance path 10 is arbitrary. The transport system 2 only needs to include one or more carts 16.
- the communication slave station 28 of the conveyance path unit 11 acquires the position information acquired by the processor 27 based on the output from each of the plurality of position sensors 26 provided in the linear scale 25.
- the communication slave station 28 transmits the acquired position information to the controller 12 via the data communication line 14.
- the controller 12 receives position information transmitted from the communication slave station 28 of each transport path unit 11.
- the controller 12 obtains position information indicating the position of the cart 16 on the transport path 10 by combining the position information from the communication slave stations 28 of each transport path unit 11 .
- the controller 12 determines the transport path unit 11 to perform regenerative power supply and the transport path unit 11 to stop regenerative power supply based on position information indicating the position of the trolley 16 on the transport path 10.
- the controller 12 excludes the first conveyance path unit and the second conveyance path unit from among the plurality of conveyance path units 11 from among the conveyance path units 11 that execute regenerative power supply.
- the controller 12 determines the transport path units 11 other than the first transport path unit and the second transport path unit among the plurality of transport path units 11 as the transport path units 11 that execute regenerative power supply.
- the first conveyance path unit is a conveyance path unit 11 in which a trolley 16, which is a conveyance body, is present.
- the second conveyance path unit includes M conveyance path units 11 located next to the first conveyance path unit in a first direction along the conveyance path 10, and M conveyance path units 11 located next to the first conveyance path unit in a first direction along the conveyance path 10, and There are N transport path units 11 located next to each other.
- the second direction is along the conveyance path 10 and is opposite to the first direction.
- the first direction is the forward direction indicated by arrow 17A.
- the second direction is the opposite direction indicated by arrow 17B.
- Each of M and N is an arbitrary integer of 1 or more.
- at least one of the one or more transport path units 11 of the transport path 10 into which the trolley 16 has not entered performs regenerative power supply.
- each conveyance path unit 11 will be described using as an example the case where the conveyance system 2 is in the state shown in FIG.
- the trolley 16A is present in the transport path unit 11A.
- the trolley 16B exists astride the transport path unit 11C and the transport path unit 11D.
- FIG. 6 is a diagram for explaining the operation of each conveyance path unit 11 provided in the conveyance system 2 according to the second embodiment.
- the controller 12 identifies the first transport path unit from the acquired position information.
- the transport path unit 11A in which the trolley 16A exists and the transport path units 11C and 11D in which the trolley 16B exists are the first transport path units.
- each transport path unit 11B, 11E, 11H is a second transport path unit.
- the controller 12 connects each transport path unit 11A, 11C, 11D, which is a first transport path unit, and each transport path unit 11B, 11E, 11H, which is a second transport path unit, to a transport system that performs regenerative power supply. route unit 11.
- the controller 12 transmits an instruction to stop the regenerative power supply to each transport path unit 11A, 11B, 11C, 11D, 11E, and 11H.
- the instruction to stop the regenerative power supply is, for example, a signal in which a flag indicating execution of the regenerative power supply is turned off.
- each of the transport path units 11F and 11G is a transport path unit 11 other than the first transport path unit and the second transport path unit.
- the controller 12 determines each of the transport path units 11F and 11G as the transport path unit 11 that executes regenerative power supply.
- the controller 12 transmits an execution instruction for supplying regenerative power to each transport path unit 11F, 11G.
- the instruction to execute regenerative power supply is, for example, a signal in which a flag indicating execution of regenerative power supply is turned on.
- the communication slave station 28 of each transport path unit 11A, 11B, 11C, 11D, 11E, 11H receives an instruction to stop the regenerative power supply sent from the controller 12.
- Each of the transport path units 11A, 11B, 11C, 11D, 11E, and 11H assumes a state in which regenerative power supply is not executed in accordance with an instruction to stop regenerative power supply.
- Each conveyance path unit 11A, 11B, 11C, 11D, 11E, 11H performs normal operation for providing power to the trolley 16.
- the communication slave station 28 of each transport path unit 11F, 11G receives an instruction to execute regenerative power supply sent from the controller 12.
- Each of the transport path units 11F and 11G executes regenerative power supply in accordance with the regenerative power supply execution instruction.
- M which is the number of second conveyance path units located next to the first conveyance path unit in the first direction
- M which is the number of second conveyance path units located next to the first conveyance path unit in the second direction.
- the number of road units, N is set in advance. At least one of M and N may be calculated based on the speed of the cart 16 on the conveyance path 10.
- the path length of the transport path unit 11 is L
- the maximum speed of the cart 16 is Vmax
- the communication cycle between the controller 12 and the transport path unit 11 is Tcyc.
- M and N is determined by rounding up the decimal point of L/(Vmax ⁇ Tcyc).
- the conveyance system 2 regenerates not only the first conveyance path unit in which the trolley 16 is present, but also the second conveyance path unit adjacent to the first conveyance path unit. It is excluded from the transport path unit 11 that executes power supply.
- the second transport path unit that is performing the normal operation for providing power to the cart 16.
- the truck 16 enters.
- the conveyance system 2 prevents the carriage 16 from entering the conveyance path unit 11 that is performing regenerative power supply during the communication cycle, so that the conveyance system 2 smoothly moves the carriage 16 in the portion where the conveyance path units 11 are adjacent to each other. It can be moved.
- M and N are arbitrary integers greater than or equal to 1, but at least one of M and N may be zero. That is, the second transport path unit includes one or more transport path units 11 located next to the first transport path unit in the first direction, and one or more transport path units 11 located next to the first transport path unit in the second direction. It suffices if at least one of the transport path units 11 is located at one or more transport path units 11 located at The transport system 2 may switch one of M and N between zero and an integer greater than or equal to one in each communication cycle based on the traveling direction of the trolley 16 in each communication cycle.
- the controller 12 controls a first transport path unit, which is the transport path unit 11 in which the transport body is present, among the plurality of transport path units 11, and a first transport path unit in the traveling direction of the transport body in the transport path 10.
- the second transport path unit which is one or more transport path units 11 located next to the second transport path unit 11, may be excluded from the transport path units 11 that perform regenerative power supply.
- the second conveyance path unit located next to the first conveyance path unit at the front in the traveling direction performs normal operations for providing power to the cart 16.
- the conveyance system 2 can smoothly move the cart 16 in the portion where the conveyance path units 11 are adjacent to each other. In this case as well, the number of second conveyance path units may be calculated based on the speed of the cart 16 on the conveyance path 10.
- the conveyance system 2 removes the first conveyance path unit and the second conveyance path unit from the conveyance path unit 11 that performs regenerative power supply. and the second transport path unit, normal operations for powering the trolley 16 are performed. Thereby, the transport system 2 can move the cart 16 smoothly. Further, the conveyance system 2 executes regenerative power supply in the conveyance path units 11 other than the first conveyance path unit and the second conveyance path unit among the plurality of conveyance path units 11. Thereby, the transport system 2 can appropriately process the regenerated power.
- FIG. 7 is a diagram showing a configuration example of the conveyance path unit 11 according to a modification of the second embodiment.
- the conveyance path unit 11 according to the modification of the second embodiment includes a temperature sensor 34.
- the controller 12 determines the transport path unit 11 to which the regenerative power supply is to be performed, based on the temperature detection results from the temperature sensors 34 of each of the plurality of transport path units 11.
- the internal temperature of the transport path unit 11 rises due to consumption of regenerative power in the coil 20.
- the controller 12 compares the temperatures of each conveyance path unit 11 of the conveyance system 2 .
- the controller 12 determines one or more transport path units 11 in descending order of temperature among the plurality of transport path units 11 as the transport path units 11 to which regenerative power supply is to be performed. Thereby, the transport system 2 can equalize the temperature of each transport path unit 11. By equalizing the temperature of each transport path unit 11, it is possible to extend the life of parts of the transport path unit 11 that deteriorate due to the influence of temperature.
- the controller 12 predetermines a temperature threshold value to be compared with the temperature detection result by the temperature sensor 34 of each of the plurality of transport path units 11, and determines whether the temperature detection result by the temperature sensor 34 is 1 or less than the temperature threshold value.
- Two or more transport path units 11 may be determined as transport path units 11 that execute regenerative power supply.
- Embodiment 3 In Embodiment 3, an example will be described in which machine learning is applied to the generation of position commands that the controller 12 outputs to each transport path unit 11.
- the controller 12 generates, based on the learned model, a position command that increases the number of transport path units 11 that perform regenerative power supply from the operation information of each trolley 16.
- the position command pattern for moving the cart 16 can take any pattern.
- One possible pattern is a pattern in which the cart 16 is moved by trapezoidal acceleration and deceleration from the starting point to the ending point during the two seconds.
- Other patterns include a pattern in which the cart 16 is moved by trapezoidal acceleration/deceleration for 1 second from the starting point and then stopped for the remaining 1 second, or a pattern in which the cart 16 is stopped for 1 second from the starting point and the cart 16 is stopped for the remaining 1 second.
- the transport system 2 can increase the number of transport path units 11 to which regenerative power is supplied per control cycle by appropriately setting the position command pattern for each trolley 16. In other words, if the conveyance system 2 can increase the number of conveyance path units 11 that execute regenerative power supply, the regenerative power consumed by one conveyance path unit 11 can be reduced. temperature rise can be prevented.
- a machine learning method is used to derive a position command that increases the number of transport path units 11 that perform regenerative power supply.
- the configuration of the conveyance system 2 according to the third embodiment is similar to the configuration of the conveyance system 2 shown in FIG.
- the controller 12 of the transport system 2 according to the third embodiment acquires position information indicating the position of the trolley 16 on the transport path 10, as in the case of the second embodiment.
- the third embodiment differs from the second embodiment in that a component for machine learning is added to the controller 12.
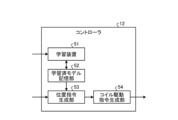
- FIG. 8 is a diagram showing a configuration example of the controller 12 provided in the transport system 2 according to the third embodiment.
- the controller 12 includes a learning device 51, a learned model storage section 52, a position command generation section 53, and a coil drive command generation section 54.
- the learning device 51 learns the relationship between the operation information of each of the plurality of carts 16 included in the transport system 2 and a position command that increases the number of transport path units 11 that perform regenerative power supply.
- the operation information is information indicating a schedule for the movement of each of the plurality of carts 16 on the transport path 10.
- the position command indicates the position to which the trolley 16 is to be moved.
- the learning device 51 outputs a learned model that is a result of learning.
- the learned model storage unit 52 stores learned models.
- the position command generation unit 53 generates, for each of the plurality of carts 16 included in the transport system 2, a position command indicating the position to which the cart 16 is to be moved.
- the position command generation unit 53 reads the learned model from the learned model storage unit 52.
- the position command generation unit 53 infers a position command that increases the number of transport path units 11 that perform regenerative power supply by inputting operation information to the learned model.
- the position command generation unit 53 generates a position command based on this inference.
- the coil drive command generation unit 54 generates a coil drive command based on the position command.
- the controller 12 controls the movement of each cart 16 by outputting a coil drive command to each transport path unit 11.
- FIG. 9 is a diagram showing a configuration example of the learning device 51 provided in the controller 12 of the third embodiment.
- the learning device 51 includes a data acquisition section 61 and a model generation section 62.
- the data acquisition unit 61 acquires learning data and creates a data set in which the learning data is combined.
- the learning data is operation information and position commands. That is, the data acquisition unit 61 acquires learning data including operation information and position commands.
- the model generation unit 62 generates a learned model using the learning data.
- the model generation unit 62 generates a learned model used for inferring a position command from operation information based on learning data.
- Reinforcement learning is a method in which an agent in an environment observes the current state and decides what action to take. Agents obtain rewards from the environment by selecting actions, and through a series of actions, they learn strategies that will yield the most rewards.
- Q-learning, TD-learning, and the like are known as representative methods of reinforcement learning.
- the action value table which is a general update formula for the action value function Q(s, a)
- the action value function Q(s, a) represents the action value Q, which is the value of the action of selecting action "a" under environment "s".
- the update formula expressed by equation (1) is that if the action value of the best action "a" at time “t+1" is greater than the action value Q of action "a" executed at time “t”, then the action Increase the value Q, and in the opposite case, decrease the action value Q.
- the action value function Q(s, a) is updated so that the action value Q of action "a” at time “t” approaches the best action value at time "t+1".
- the best action value in a certain environment is sequentially propagated to the action value in the previous environment.
- the model generation unit 62 includes a reward calculation unit 63 and a function update unit 64.
- the remuneration calculation unit 63 calculates remuneration based on the data set.
- the function update unit 64 updates the function for determining the position command according to the reward calculated by the reward calculation unit 63.
- the reward calculation unit 63 calculates the reward "r" based on the number of transport path units 11 that perform regenerative power supply for each control cycle. For example, a reference number, which is the standard for the number of transport path units 11 that perform regenerative power supply, is determined in advance, and when the number of transport path units 11 that performs regenerative power supply exceeds the standard number, remuneration calculation is performed.
- the unit 63 increases the reward "r".
- the reward calculation unit 63 increases the reward "r” by giving a reward value of "1". Note that the reward value is not limited to "1".
- the reward calculation unit 63 decreases the reward "r".
- the reward calculation unit 63 decreases the reward "r" by giving a reward value of "-1". Note that the reward value is not limited to "-1". Moreover, an arbitrary number can be set as the reference number. The reference number is determined, for example, based on the total number of conveyance path units 11 constituting the conveyance system 2 and the total number of trolleys 16 constituting the conveyance system 2, taking into account the magnitude of regenerative power or the frequency of generation of regenerative power. Can be set.
- the function update unit 64 updates a function that is a model for determining a position command according to the reward calculated by the reward calculation unit 63. Updating the function can be done according to the data set, for example by updating the action value table.
- the action value table is a data set in which arbitrary actions and their action values are associated with each other and stored in a table format. For example, in the case of Q learning, the action value function Q (s t , a t ) expressed by the above equation (1) is used as a function for determining the position command.
- FIG. 10 is a flowchart showing the processing procedure of the learning device 51 provided in the controller 12 of the third embodiment. A reinforcement learning method for updating the action value function Q(s,a) will be described with reference to the flowchart in FIG.
- step S11 the learning device 51 uses the data acquisition unit 61 to acquire operation information and a position command. That is, the learning device 51 acquires learning data.
- the data acquisition unit 61 outputs a data set of learning data to the model generation unit 62.
- step S12 the learning device 51 calculates the reward using the reward calculation unit 63.
- the remuneration calculation unit 63 calculates the remuneration for the combination of the operation information for each trolley 16 and the position command for each trolley 16.
- the reward calculation unit 63 increases or decreases the reward based on the number of conveyance path units 11 that perform regenerative power supply for each control cycle.
- step S13 the learning device 51 updates the action value function using the function updating unit 64.
- the function updating unit 64 updates the action value function Q(s, a) based on the reward calculated in step S12.
- the learning device 51 updates the action value function Q(s t , at ) stored in the learned model storage unit 52 .
- step S14 the learning device 51 uses the function updating unit 64 to determine whether the action value function Q(s, a) has converged.
- the function updating unit 64 determines that the action value function Q (s, a) has converged because the action value function Q (s, a) is no longer updated in step S13.
- step S14, No If it is determined that the action value function Q(s, a) has not converged (step S14, No), the learning device 51 returns the procedure to step S11. On the other hand, if it is determined that the action value function Q(s, a) has converged (step S14, Yes), the learning device 51 ends the process according to the procedure shown in FIG. Note that the learning device 51 may continue learning by returning the procedure from step S13 to step S11 without making the determination in step S14.
- the learned model storage unit 52 stores the learned model that is the generated action value function Q(s, a).
- reinforcement learning is applied to the learning algorithm used by the learning device 51, but learning other than reinforcement learning may be applied to the learning algorithm.
- the learning device 51 may perform machine learning using a known learning algorithm other than reinforcement learning, such as deep learning, neural network, genetic programming, inductive logic programming, or support vector machine. good.
- the learning device 51 shown in FIGS. 8 and 9 is a device built into the controller 12.
- the learning device 51 may be a device external to the controller 12.
- the learning device 51 may be a device connectable to the controller 12 via a network.
- the learning device 51 may be a device existing on a cloud server.
- the learning device 51 may learn position commands that increase the number of transport path units 11 that perform regenerative power supply, according to data sets created for a plurality of transport systems 2.
- the learning device 51 may acquire learning data from a plurality of transport systems 2 used at the same location, or may acquire learning data from a plurality of transport systems 2 used at different locations. Also good.
- the learning data may be collected from a plurality of transport systems 2 that operate independently from each other at a plurality of locations. After starting the collection of learning data from a plurality of transport systems 2, a new transport system 2 may be added as a target for which learning data is collected. Further, after starting the collection of learning data from the plurality of transport systems 2, some of the plurality of transport systems 2 may be excluded from the targets for which learning data is collected.
- the learning device 51 that has learned about one conveyance system 2 may also learn about other conveyance systems 2 other than that conveyance system 2.
- the learning device 51 that performs learning on the other transport system 2 can update the learned model by relearning on the other transport system 2.
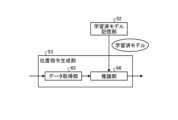
- FIG. 11 is a diagram showing an example of the configuration of the position command generation section 53 provided in the controller 12 of the third embodiment.
- the position command generation unit 53 has a function as an inference device that infers a position command from operation information.
- the position command generation section 53 includes a data acquisition section 65 and an inference section 66.
- the data acquisition unit 65 acquires inference data.
- the inference data is operation information about each of the plurality of carts 16 included in the transport system 2.
- the inference unit 66 reads out the learned model generated by the learning device 51 from the learned model storage unit 52.
- the inference unit 66 infers a position command by inputting inference data to the learned model.
- the inference section 66 outputs a position command, which is the inference result, to the coil drive command generation section 54 .
- the coil drive command generation unit 54 generates a coil drive command based on the position command.
- FIG. 12 is a flowchart showing the processing procedure of the position command generation section 53 and the coil drive command generation section 54 provided in the controller 12 of the third embodiment.
- step S21 the position command generation unit 53 uses the data acquisition unit 65 to acquire operation information of each trolley 16.
- the data acquisition unit 65 outputs the acquired operation information to the inference unit 66.
- step S22 the position command generation unit 53 generates a position command by inputting the operation information of each trolley 16 to the learned model in the inference unit 66.
- step S23 the inference section 66 outputs a position command to the coil drive command generation section 54.
- step S24 the coil drive command generation unit 54 generates a coil drive command based on the position command.
- the transport system 2 includes the learning device 51 and the position command generation unit 53, which is an inference device, so that the transport system 2 can be set at a position where the number of transport path units 11 that perform regenerative power supply increases. Directives can be derived. This allows the transport system 2 to appropriately process the regenerated power.
- the machine learning described in the third embodiment may be applied to generation of a position command when regenerative power supply is executed in the transport path unit 11 into which the trolley 16 has not entered, as in the first embodiment.
- the transport system 2 may generate the position command using a method other than machine learning.
- the controller 12 is realized by a processing circuit.
- the processing circuit may be a circuit on which a processor executes software, or may be a dedicated circuit.
- FIG. 13 is a diagram showing a configuration example of control circuit 80 according to the first to third embodiments.
- the control circuit 80 includes an input section 81, a processor 82, a memory 83, and an output section 84.
- the input unit 81 is an interface circuit that receives data input from outside the control circuit 80 and provides it to the processor 82 .
- the output unit 84 is an interface circuit that sends data from the processor 82 or memory 83 to the outside of the control circuit 80.
- the controller 12 is realized by software, firmware, or a combination of software and firmware.
- Software or firmware is written as a program and stored in memory 83.
- the processing circuit realizes each function of the controller 12 by having the processor 82 read and execute a program stored in the memory 83. That is, the processing circuit includes a memory 83 for storing a program that results in the processing of the controller 12 being executed. It can also be said that these programs cause the computer to execute the procedures and methods of the controller 12.
- the processor 82 is a CPU.
- Processor 82 may be a central processing unit, processing unit, arithmetic unit, microprocessor, microcomputer, processor, or DSP.
- the memory 83 is, for example, RAM (Random Access Memory), ROM (Read Only Memory), flash memory, EPROM (Erasable Programmable Read Only Memory), EEPROM (registered trademark) (Electrically Erasable Programmable Read Only Memory). ), etc., non-volatile Alternatively, volatile semiconductor memory, magnetic disk, flexible disk, optical disk, compact disk, mini disk, DVD (Digital Versatile Disc), etc. are applicable.
- FIG. 13 is an example of hardware in which the controller 12 is implemented by a general-purpose processor 82 and memory 83, the controller 12 may also be implemented by a dedicated hardware circuit.
- FIG. 14 is a diagram showing a configuration example of the dedicated hardware circuit 85 according to the first to third embodiments.
- the dedicated hardware circuit 85 includes an input section 81, an output section 84, and a processing circuit 86.
- the processing circuit 86 is a single circuit, a composite circuit, a programmed processor, a parallel programmed processor, an ASIC (Application Specific Integrated Circuit), an FPGA (Field Programmable Gate Array), or a combination thereof.
- Each function of the controller 12 may be realized by the processing circuit 86 for each function, or each function may be realized by the processing circuit 86 collectively. Note that the controller 12 may be realized by combining the control circuit 80 and the hardware circuit 85.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Software Systems (AREA)
- Theoretical Computer Science (AREA)
- Electromagnetism (AREA)
- Mathematical Physics (AREA)
- General Physics & Mathematics (AREA)
- Evolutionary Computation (AREA)
- Medical Informatics (AREA)
- Artificial Intelligence (AREA)
- Computing Systems (AREA)
- Data Mining & Analysis (AREA)
- General Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Non-Mechanical Conveyors (AREA)
- Control Of Vehicles With Linear Motors And Vehicles That Are Magnetically Levitated (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Linear Motors (AREA)
- Control Of Conveyors (AREA)
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE112022007134.6T DE112022007134T5 (de) | 2022-08-18 | 2022-08-18 | Fördersystem |
| CN202280097557.4A CN119486955B (zh) | 2022-08-18 | 2022-08-18 | 输送系统 |
| PCT/JP2022/031261 WO2024038558A1 (ja) | 2022-08-18 | 2022-08-18 | 搬送システム |
| JP2023504120A JP7258266B1 (ja) | 2022-08-18 | 2022-08-18 | 搬送システム |
| US18/863,671 US12362694B2 (en) | 2022-08-18 | 2022-08-18 | Conveyance system |
| KR1020247041499A KR102763864B1 (ko) | 2022-08-18 | 2022-08-18 | 반송 시스템 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/031261 WO2024038558A1 (ja) | 2022-08-18 | 2022-08-18 | 搬送システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024038558A1 true WO2024038558A1 (ja) | 2024-02-22 |
Family
ID=85980404
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/031261 Ceased WO2024038558A1 (ja) | 2022-08-18 | 2022-08-18 | 搬送システム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US12362694B2 (https=) |
| JP (1) | JP7258266B1 (https=) |
| KR (1) | KR102763864B1 (https=) |
| CN (1) | CN119486955B (https=) |
| DE (1) | DE112022007134T5 (https=) |
| WO (1) | WO2024038558A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7721039B1 (ja) * | 2024-11-27 | 2025-08-08 | 三菱電機株式会社 | 搬送システム |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12545532B2 (en) * | 2023-10-23 | 2026-02-10 | Rockwell Automation Technologies, Inc. | Persistent vehicle identification for an independent cart system |
| JP7665874B1 (ja) * | 2024-02-22 | 2025-04-21 | 三菱電機株式会社 | 搬送システム |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0974616A (ja) * | 1995-09-07 | 1997-03-18 | Murata Mach Ltd | リニア搬送車システム |
| JPH09208051A (ja) * | 1996-02-05 | 1997-08-12 | Murata Mach Ltd | リニア搬送車システム |
| WO2010110013A1 (ja) * | 2009-03-24 | 2010-09-30 | 株式会社Ihi | 同一負荷パターンを有する装置の省電力駆動装置及び方法 |
| JP2017042029A (ja) * | 2015-08-21 | 2017-02-23 | 村田機械株式会社 | リニアモータシステム |
| US10164555B1 (en) * | 2018-02-14 | 2018-12-25 | Rockwel Automation Technologies, Inc. | Virtual mid-bus generation in a power system for industrial control |
| JP2021078348A (ja) * | 2019-11-06 | 2021-05-20 | コベリ カンパニー リミテッド | リニアモータ及びリニアモータを利用した搬送システム |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4031398B2 (ja) | 2003-07-04 | 2008-01-09 | 住友重機械工業株式会社 | 成形機 |
| JP5753060B2 (ja) * | 2011-11-07 | 2015-07-22 | ヤマハ発動機株式会社 | リニアコンベア及びその駆動制御方法 |
| US9050896B2 (en) * | 2012-11-22 | 2015-06-09 | Paramount Pictures Corporation | Regenerative energy system for ground transportation vehicles |
| JP2015157659A (ja) * | 2014-02-21 | 2015-09-03 | 株式会社東芝 | 物品仕分装置 |
| JP2016159250A (ja) * | 2015-03-03 | 2016-09-05 | 株式会社東芝 | 物品仕分装置 |
| US9812939B2 (en) | 2015-08-21 | 2017-11-07 | Murata Machinery, Ltd. | Linear motor system |
| WO2019043794A1 (ja) * | 2017-08-29 | 2019-03-07 | 株式会社Fuji | ワーク搬送コンベア及びワーク搬送システム |
| EP3581428B1 (de) | 2018-06-14 | 2021-06-09 | B&R Industrial Automation GmbH | Kurzschlussbremsung eines llm |
| JP7016327B2 (ja) * | 2019-01-18 | 2022-02-04 | 株式会社Fuji | 搬送システム、及びキャリアの位置を特定する方法 |
| CN114600360B (zh) * | 2019-10-28 | 2023-07-25 | 三菱电机株式会社 | 转换器及电动机控制系统 |
| KR20210122094A (ko) * | 2020-03-30 | 2021-10-08 | 스미도모쥬기가이고교 가부시키가이샤 | 리니어모터반송시스템 및 그 운용방법 |
-
2022
- 2022-08-18 US US18/863,671 patent/US12362694B2/en active Active
- 2022-08-18 DE DE112022007134.6T patent/DE112022007134T5/de active Granted
- 2022-08-18 CN CN202280097557.4A patent/CN119486955B/zh active Active
- 2022-08-18 WO PCT/JP2022/031261 patent/WO2024038558A1/ja not_active Ceased
- 2022-08-18 JP JP2023504120A patent/JP7258266B1/ja active Active
- 2022-08-18 KR KR1020247041499A patent/KR102763864B1/ko active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0974616A (ja) * | 1995-09-07 | 1997-03-18 | Murata Mach Ltd | リニア搬送車システム |
| JPH09208051A (ja) * | 1996-02-05 | 1997-08-12 | Murata Mach Ltd | リニア搬送車システム |
| WO2010110013A1 (ja) * | 2009-03-24 | 2010-09-30 | 株式会社Ihi | 同一負荷パターンを有する装置の省電力駆動装置及び方法 |
| JP2017042029A (ja) * | 2015-08-21 | 2017-02-23 | 村田機械株式会社 | リニアモータシステム |
| US10164555B1 (en) * | 2018-02-14 | 2018-12-25 | Rockwel Automation Technologies, Inc. | Virtual mid-bus generation in a power system for industrial control |
| JP2021078348A (ja) * | 2019-11-06 | 2021-05-20 | コベリ カンパニー リミテッド | リニアモータ及びリニアモータを利用した搬送システム |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7721039B1 (ja) * | 2024-11-27 | 2025-08-08 | 三菱電機株式会社 | 搬送システム |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20250006316A (ko) | 2025-01-10 |
| CN119486955A (zh) | 2025-02-18 |
| KR102763864B1 (ko) | 2025-02-07 |
| US12362694B2 (en) | 2025-07-15 |
| CN119486955B (zh) | 2025-11-28 |
| US20250112576A1 (en) | 2025-04-03 |
| JP7258266B1 (ja) | 2023-04-14 |
| JPWO2024038558A1 (https=) | 2024-02-22 |
| DE112022007134T5 (de) | 2025-02-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2024038558A1 (ja) | 搬送システム | |
| EP2677385B1 (en) | Transport carriage system and method for controlling running of transport carriage | |
| CN115729232B (zh) | 用于使独立推车系统中多个车辆的运动同步的系统和方法 | |
| JPWO2024038558A5 (https=) | ||
| JP7258265B1 (ja) | 搬送システム | |
| JP7427142B1 (ja) | 搬送システム | |
| US12005941B2 (en) | System and method for controlling movers in an independent cart system during heavy traffic | |
| JP7415085B1 (ja) | 搬送システム | |
| CN118402170B (zh) | 输送系统及输送模块 | |
| JP5532140B2 (ja) | 離散配置リニアモータの乗り移り制御装置 | |
| KR102960318B1 (ko) | 반송 시스템 | |
| Stopkin et al. | Model for a Direct Torque Control System of an Alternating Current Electric Drive for Urban Transport Rolling Stock Tasks | |
| JP7665874B1 (ja) | 搬送システム | |
| JP5348107B2 (ja) | 搬送車 | |
| YOUNUS | AN ADVANCED CONTROL SCHEME FOR BRUSHLESS DC MOTOR SPEED CONTROL BASED ON HYBRİD GRAY WOLF OPTİMİZATİON-PI CONTROLLER | |
| JP2026003622A (ja) | 搬送システム | |
| WO2024180737A1 (ja) | 搬送システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| ENP | Entry into the national phase |
Ref document number: 2023504120 Country of ref document: JP Kind code of ref document: A |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22955732 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18863671 Country of ref document: US |
|
| ENP | Entry into the national phase |
Ref document number: 20247041499 Country of ref document: KR Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 1020247041499 Country of ref document: KR |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 112022007134 Country of ref document: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202280097557.4 Country of ref document: CN |
|
| WWP | Wipo information: published in national office |
Ref document number: 202280097557.4 Country of ref document: CN |
|
| WWP | Wipo information: published in national office |
Ref document number: 112022007134 Country of ref document: DE |
|
| WWP | Wipo information: published in national office |
Ref document number: 18863671 Country of ref document: US |
|
| WWG | Wipo information: grant in national office |
Ref document number: 18863671 Country of ref document: US |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 22955732 Country of ref document: EP Kind code of ref document: A1 |