WO2024009439A1 - 経路計画装置及び経路計画方法 - Google Patents
経路計画装置及び経路計画方法 Download PDFInfo
- Publication number
- WO2024009439A1 WO2024009439A1 PCT/JP2022/026868 JP2022026868W WO2024009439A1 WO 2024009439 A1 WO2024009439 A1 WO 2024009439A1 JP 2022026868 W JP2022026868 W JP 2022026868W WO 2024009439 A1 WO2024009439 A1 WO 2024009439A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- route
- coordinates
- heavy equipment
- erected
- planning
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 14
- 238000013507 mapping Methods 0.000 claims abstract description 11
- 238000010276 construction Methods 0.000 claims description 5
- 230000004931 aggregating effect Effects 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 10
- 238000004891 communication Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
Images










Classifications
-
- E—FIXED CONSTRUCTIONS
- E04—BUILDING
- E04H—BUILDINGS OR LIKE STRUCTURES FOR PARTICULAR PURPOSES; SWIMMING OR SPLASH BATHS OR POOLS; MASTS; FENCING; TENTS OR CANOPIES, IN GENERAL
- E04H12/00—Towers; Masts or poles; Chimney stacks; Water-towers; Methods of erecting such structures
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B7/00—Special methods or apparatus for drilling
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Information and communication technology [ICT] specially adapted for implementation of business processes of specific business sectors, e.g. utilities or tourism
- G06Q50/08—Construction
Definitions
- the present disclosure relates to a route planning device and a route planning method that generate a route plan for heavy machinery that performs utility pole construction.
- Utility pole construction is carried out by operators operating heavy machinery.
- the related work procedure is shown in Figure 1.
- workers conduct a site survey to understand the location of obstacles and the position where the utility pole will be erected (pole position) (51), and then, based on the site survey, determine how to operate the heavy equipment. I was making a plan (52).
- the worker instructed the heavy equipment operator to operate the heavy equipment (53), and the operator operated the heavy equipment according to the worker's instructions (54).
- An object of the present disclosure is to provide a route planning device and a route planning method that can present efficient placement of heavy equipment and utility poles to workers without relying on the skills of the workers.
- a combination of coordinates for arranging heavy equipment and coordinates for laying down utility poles to be erected on a map near the work site is converted into points, and a heat map is displayed for each coordinate for arranging heavy equipment. And so.
- this disclosure provides: a first acquisition unit that acquires the position of the pillar and the position of the obstacle; a mapping unit that applies the acquired pillar erected position and the obstacle position to a map in the vicinity of the work place, and sets a work area of a predetermined size centered on a position a predetermined distance from the acquired pillar erected position; a second acquisition unit that acquires the number of divisions into which the work area is divided; A combination of all the coordinates for arranging heavy equipment and all the coordinates for laying down utility poles to be erected in the work area divided according to the number of divisions acquired by the second acquisition unit, the construction of poles is determined from the coordinates for arranging heavy equipment.
- This is a route planning device comprising:
- the planning unit ranks the route with a high probability of search success in the generated route plan, ranks the route with a short route travel time highly, and scores the route based on efficiency based on the two ranks. It is characterized by
- the first acquisition unit further acquires the size of the heavy equipment and the size of the utility pole
- the planning unit is characterized in that it generates a route plan in consideration of the size of the heavy equipment and the size of the utility pole.
- This disclosure further comprising a sensor unit that scans the obstacle position,
- the first acquisition unit is characterized in that the first acquisition unit acquires the obstacle position from the sensor unit.
- the route planning device a first acquisition step of acquiring the position of the pillar and the position of the obstacle; a mapping step of applying the acquired pillar erecting position and the obstacle position to a map of the vicinity of the work place, and setting a work area of a predetermined size centered on a position a predetermined distance from the acquired pillar erecting position; a second acquisition step of acquiring the number of divisions into which the work area is divided; A combination of all the coordinates for arranging heavy machinery and all the coordinates for laying down the utility poles to be erected in the work area divided according to the number of divisions obtained in the second acquisition step, from the coordinates for arranging the heavy equipment to the poles to be erected.
- the route with a high search success probability is ranked highly
- the route with a short route travel time is ranked highly
- points are scored based on the efficiency based on the two ranks. It is characterized by
- the size of the heavy equipment and the size of the utility pole are further acquired
- a route plan is generated taking into consideration the size of the heavy equipment and the size of the utility pole.
- this disclosure provides: A program for causing a computer to function as the route planning device according to claim 1.
- FIG. 1 is a diagram illustrating the configuration of a route planning device according to the present disclosure.
- FIG. 2 is a diagram illustrating the operation of the route planning device of the present disclosure. It is a figure explaining the map to which the pillar erected position and the obstacle position were applied.
- FIG. 2 is a diagram illustrating a map in which work areas are set.
- FIG. 3 is a diagram illustrating a map in which a work area is divided.
- FIG. 2 is a diagram illustrating a map specifying coordinates for arranging heavy machinery.
- FIG. 2 is a diagram illustrating a map specifying the coordinates for laying down utility poles to be erected.
- FIG. 3 is a diagram showing search success probability and route travel time. It is a figure in which search success probability and route travel time are aggregated and converted into points. It is a diagram visualizing the points for the coordinates where the utility pole is laid down.
- FIG. 3 is a diagram showing a heat map display.
- the route planning device 10 includes a first acquisition unit 11 that acquires the pillar erected positions and obstacle positions, and a first acquisition unit 11 that acquires the pillar erected positions and obstacle positions, and applies the acquired pillar erected positions and obstacle positions to a map in the vicinity of the work place, and the acquired pillar erected positions.
- a mapping unit 12 that sets a work area of a predetermined size centered on a position a predetermined distance away from a location
- a second acquisition unit 13 that acquires the number of divisions into which the work area is to be divided, and a division acquired by the second acquisition unit.
- the poles are erected from the coordinates for placing the heavy equipment via the coordinates for laying down the utility poles to be erected.
- a planning unit 14 that generates a route plan to a location, aggregates the search success probability and route travel time in each route plan and converts it into a score, and a display that displays a heat map of the aggregated score for each coordinate where the heavy equipment is placed. 15.
- FIG. 3 shows the operation of the route planning device of the present disclosure.
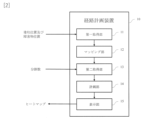
- the operation of the route planning device of the present disclosure includes a first acquisition step 21, a mapping step 22, a second acquisition step 23, a planning step 24, and a display step 25. This will be explained below with reference to FIGS. 2 and 3.
- the worker inputs the location of the utility pole in the work area, and the location of obstacles such as existing obstacles and utility pole equipment.
- the first acquisition unit 11 of the route planning device 10 acquires the input pillar positions and obstacle positions.
- the route planning device 10 may acquire the obstacle position from a sensor unit (not shown) external to the route planning device 10 that scans the work place.
- the route planning device 10 may also include a sensor section (not shown) that scans the work place, and the sensor section may scan the position of an obstacle.
- the first acquisition unit 11 acquires the obstacle position from the sensor unit. If the sensor section scans the obstacle position, the obstacle position can be acquired without human intervention.
- the first acquisition unit may further acquire the size of the heavy equipment and the size of the utility pole to be laid down. When searching for a route, it is possible to accurately calculate the locations through which heavy equipment can pass.
- mapping step The mapping unit 12 of the route planning device 10 applies the acquired pillar positions and obstacle positions to a map of the vicinity of the work site.
- Figure 4 shows a map showing the positions of pillars and obstacles.
- 31 is an obstacle position
- 32 is a pillar erection position.
- an existing utility pole is present at an obstacle position 31 marked with a black circle
- an existing electric wire is present at an obstacle position 31 indicated by a broken line.
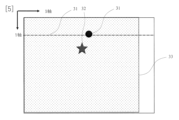
- FIG. 5 shows a map with work areas set.
- a work area 33 is set compared to FIG. 4.
- the center of the work area 33 is a predetermined distance away from the acquired pole erection position 32.
- the work area 33 is 30 m square
- the longitudinal direction of the existing electric wire is the X axis
- the center of the work area is 10 m from the pole erection position 32 in the Y axis direction.
- the worker inputs the number of divisions into which the work area is to be divided.
- the second acquisition unit 13 acquires the input division number.
- the planning unit 14 divides the work area into a matrix, as shown in FIG. 6, according to the number of divisions acquired by the second acquisition unit 13.
- the planning unit 14 specifies coordinates 34 where the heavy equipment is to be placed, as shown in FIG. It is preferable to use the tip of the heavy machinery as the coordinates of the heavy machinery.
- the planning unit 14 specifies the coordinates 35 at which the utility pole to be erected will lie, as shown in FIG.
- a route plan is generated from the coordinates 34 where the heavy equipment is placed to the position 32 where the utility pole is to be erected via the coordinates 35 where the utility pole is laid down.
- a route plan is generated by combining all the coordinates for placing heavy equipment and all the coordinates for laying down utility poles in the divided work area, and the search success probability and route travel time for each route plan are calculated. As shown in FIG. 9, the search success probability and route travel time are obtained for each coordinate where heavy machinery is placed and all coordinates where utility poles to be erected are laid down.
- RRT Rapidly Exploring Random Tree
- RRT* Rapidly Exploring Random Tree Star
- the search success probability is calculated by dividing the number of successful route searches by the number of route search attempts on the route from the coordinates where the heavy equipment is placed to the position where the utility pole is to be erected.
- the percentage of Examples of route search failures include failure to reach the position from the coordinates for placing heavy equipment to the coordinates for laying down the utility pole to be erected within the preset calculation time, or due to obstacles.
- the route may be closed.
- the number of searches is set in advance.
- Route travel time refers to the time required for heavy equipment to depart from the coordinates where the heavy equipment is placed, go through the coordinates where the utility pole to be erected is laid down, and reach the position where the pole is to be erected. is the relative speed divided by .
- the median value of the searched minutes may be used as the route travel time.
- the average value of the searched portion may be used as the route travel time.
- the first acquisition unit 11 acquires the size of heavy machinery and the size of utility poles, it is possible to search for a route with respect to obstacles taking these sizes into consideration.
- the size of heavy machinery include the overall length, width, and length of the arm that grips the utility pole.
- the size of a utility pole is determined by its length in the long axis direction. The route from the coordinates where the heavy equipment will be placed to the coordinates where the utility pole will be erected will take into account only the size of the heavy equipment, and the route from the coordinates where the utility pole will be laid down to the position where the pole will be erected will take into consideration the size of the heavy equipment and the size of the utility pole. good.
- the planning unit 14 aggregates the search success probability and route travel time in each generated route plan and converts it into a score.
- FIG. 10 shows an example of aggregating and scoring.
- the search success probabilities (Success Probability of Pass Planning) are ranked in five stages from 0 to 4, and routes with high search success probabilities are ranked high and routes with low search success probabilities are ranked low.
- the route execution time is ranked in four stages from 1 to 4, and routes with short route travel times are ranked high and routes with long route travel times are ranked low.
- the product of the rank of search success probability and the rank of route travel time is calculated, and a score is given for each combination of the coordinates where heavy equipment is placed and the coordinates where utility poles are laid down.
- the display unit 15 displays a heat map of the scores aggregated for each coordinate (square mark) where the heavy equipment is placed.
- FIG. 12 An example of a heat map display is shown in FIG. In FIG. 12, the scores are 16, 12, and 9 in descending order of score. Only combinations that have good scores above a certain level may be heat mapped. For example, as shown in FIG. 12, the score is 9 or more.
- the route planning device of the present disclosure can also be realized by a computer and a program, and the program that causes the computer to function as the route planning device can be recorded on a recording medium or provided through a network.
- This disclosure can be applied to various industries including the information and communication industry.
Landscapes
- Engineering & Computer Science (AREA)
- Business, Economics & Management (AREA)
- Life Sciences & Earth Sciences (AREA)
- Architecture (AREA)
- Physics & Mathematics (AREA)
- Geology (AREA)
- Mining & Mineral Resources (AREA)
- General Health & Medical Sciences (AREA)
- Strategic Management (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Economics (AREA)
- Fluid Mechanics (AREA)
- Human Resources & Organizations (AREA)
- Marketing (AREA)
- Primary Health Care (AREA)
- Geochemistry & Mineralogy (AREA)
- Tourism & Hospitality (AREA)
- General Business, Economics & Management (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Environmental & Geological Engineering (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Conveying And Assembling Of Building Elements In Situ (AREA)
Abstract
本開示は、建柱位置及び障害物位置を取得する第一取得部と、取得した前記建柱位置及び前記障害物位置を作業場所近辺のマップに当てはめ、取得した前記建柱位置から所定距離だけ離れた位置を中心に所定の広さの作業エリアを設定するマッピング部と、前記作業エリアを分割する分割数を取得する第二取得部と、前記第二取得部の取得する分割数に応じて分割した前記作業エリア内で重機を配置する全ての座標と建柱する電柱を寝かせる全ての座標との組み合わせで、重機を配置する座標から建柱する電柱を寝かせる座標を経由して建柱する位置までの経路計画を生成し、それぞれの経路計画における探索成功確率及び経路移動時間を集約して点数化する計画部と、重機を配置する座標ごとに集約した点数をヒートマップ表示する表示部と、を備える経路計画装置である。
Description
本開示は、電柱工事を行う重機の経路計画を生成する経路計画装置及び経路計画方法に関する。
電柱工事は、操作者が重機を操作して行う。関連する作業手順を図1に示す。まず、作業者が現場調査を行い、障害物の位置と電柱を建てる位置(建柱位置)を把握し(51)、現場調査を基に、重機をどのように動作させればよいかの工事計画を作成していた(52)。作業者は、重機操作者に重機の操作を指示し(53)、操作者は作業者の指示に従って、重機を動作させていた(54)。
現場の作業環境によっては重機の配置する位置を変更したり、電柱を寝かせる位置を変更したりして、重機の経路計画を変更しなければならなかった。
"MATLABではじめる自律移動システムのためのパスプランニング", https://www.mathworks.com/content/dam/mathworks/mathworks-dot-com/images/events/matlabexpo/jp/2017/d2-path-planning-trajectory-CONTROL.pdf
このような電柱工事では、重機を配置する位置や建柱する電柱を寝かせる位置の計画にはスキルが必要であり、その配置の策定にはスキルを持つ作業者の経験や感覚に頼る部分が多かった。
本開示は、作業者のスキルに頼ることなく、効率的な重機や電柱の配置を作業者に提示することができる経路計画装置及び経路計画方法を提供することを目的とする。
本開示の経路計画装置及び経路計画方法では、作業場所近辺のマップ上で重機を配置する座標と建柱する電柱を寝かせる座標の組み合わせを点数化し、重機を配置する座標ごとにヒートマップ表示することとした。
具体的には、本開示は、
建柱位置及び障害物位置を取得する第一取得部と、
取得した前記建柱位置及び前記障害物位置を作業場所近辺のマップに当てはめ、取得した前記建柱位置から所定距離だけ離れた位置を中心に所定の広さの作業エリアを設定するマッピング部と、
前記作業エリアを分割する分割数を取得する第二取得部と、
前記第二取得部の取得する分割数に応じて分割した前記作業エリア内で重機を配置する全ての座標と建柱する電柱を寝かせる全ての座標との組み合わせで、重機を配置する座標から建柱する電柱を寝かせる座標を経由して建柱する位置までの経路計画を生成し、それぞれの経路計画における探索成功確率及び経路移動時間を集約して点数化する計画部と、
重機を配置する座標ごとに集約した点数をヒートマップ表示する表示部と、
を備える経路計画装置
である。
建柱位置及び障害物位置を取得する第一取得部と、
取得した前記建柱位置及び前記障害物位置を作業場所近辺のマップに当てはめ、取得した前記建柱位置から所定距離だけ離れた位置を中心に所定の広さの作業エリアを設定するマッピング部と、
前記作業エリアを分割する分割数を取得する第二取得部と、
前記第二取得部の取得する分割数に応じて分割した前記作業エリア内で重機を配置する全ての座標と建柱する電柱を寝かせる全ての座標との組み合わせで、重機を配置する座標から建柱する電柱を寝かせる座標を経由して建柱する位置までの経路計画を生成し、それぞれの経路計画における探索成功確率及び経路移動時間を集約して点数化する計画部と、
重機を配置する座標ごとに集約した点数をヒートマップ表示する表示部と、
を備える経路計画装置
である。
本開示は、
前記計画部は、生成した経路計画で前記探索成功確率の高い経路を高くランク付けし、前記経路移動時間の短い経路を高くランク付けし、2つのランクに基づいて効率の良さで点数化する
ことを特徴とする。
前記計画部は、生成した経路計画で前記探索成功確率の高い経路を高くランク付けし、前記経路移動時間の短い経路を高くランク付けし、2つのランクに基づいて効率の良さで点数化する
ことを特徴とする。
本開示は、
前記第一取得部は、重機のサイズ及び電柱のサイズをさらに取得し、
前記計画部は、前記重機のサイズ及び前記電柱のサイズを考慮して経路計画を生成する
ことを特徴とする。
前記第一取得部は、重機のサイズ及び電柱のサイズをさらに取得し、
前記計画部は、前記重機のサイズ及び前記電柱のサイズを考慮して経路計画を生成する
ことを特徴とする。
本開示は、
前記障害物位置をスキャンするセンサ部をさらに備え、
前記第一取得部は、前記センサ部から前記障害物位置を取得する
ことを特徴とする。
前記障害物位置をスキャンするセンサ部をさらに備え、
前記第一取得部は、前記センサ部から前記障害物位置を取得する
ことを特徴とする。
具体的には、本開示は、
経路計画装置が、
建柱位置及び障害物位置を取得する第一取得ステップと、
取得した前記建柱位置及び前記障害物位置を作業場所近辺のマップに当てはめ、取得した前記建柱位置から所定距離だけ離れた位置を中心に所定の広さの作業エリアを設定するマッピングステップと、
前記作業エリアを分割する分割数を取得する第二取得ステップと、
前記第二取得ステップで取得する分割数に応じて分割した前記作業エリア内で重機を配置する全ての座標と建柱する電柱を寝かせる全ての座標との組み合わせで、重機を配置する座標から建柱する電柱を寝かせる座標を経由して建柱する位置までの経路計画を生成し、それぞれの経路計画における探索成功確率及び経路移動時間を集約して点数化する計画ステップと、
重機を配置する座標ごとに集約した点数をヒートマップ表示する表示ステップと、
を実行する経路計画方法
である。
経路計画装置が、
建柱位置及び障害物位置を取得する第一取得ステップと、
取得した前記建柱位置及び前記障害物位置を作業場所近辺のマップに当てはめ、取得した前記建柱位置から所定距離だけ離れた位置を中心に所定の広さの作業エリアを設定するマッピングステップと、
前記作業エリアを分割する分割数を取得する第二取得ステップと、
前記第二取得ステップで取得する分割数に応じて分割した前記作業エリア内で重機を配置する全ての座標と建柱する電柱を寝かせる全ての座標との組み合わせで、重機を配置する座標から建柱する電柱を寝かせる座標を経由して建柱する位置までの経路計画を生成し、それぞれの経路計画における探索成功確率及び経路移動時間を集約して点数化する計画ステップと、
重機を配置する座標ごとに集約した点数をヒートマップ表示する表示ステップと、
を実行する経路計画方法
である。
本開示は、
前記計画ステップでは、生成した経路計画で前記探索成功確率の高い経路を高くランク付けし、前記経路移動時間の短い経路を高くランク付けし、2つのランクに基づいて効率の良さで点数化する
ことを特徴とする。
前記計画ステップでは、生成した経路計画で前記探索成功確率の高い経路を高くランク付けし、前記経路移動時間の短い経路を高くランク付けし、2つのランクに基づいて効率の良さで点数化する
ことを特徴とする。
本開示は、
前記第一取得ステップでは、重機のサイズ及び電柱のサイズをさらに取得し、
前記計画ステップでは、前記重機のサイズ及び前記電柱のサイズを考慮して経路計画を生成する
ことを特徴とする。
前記第一取得ステップでは、重機のサイズ及び電柱のサイズをさらに取得し、
前記計画ステップでは、前記重機のサイズ及び前記電柱のサイズを考慮して経路計画を生成する
ことを特徴とする。
具体的には、本開示は、
コンピュータに請求項1に記載の経路計画装置として機能させるためのプログラム
である。
コンピュータに請求項1に記載の経路計画装置として機能させるためのプログラム
である。
なお、上記各開示の発明は、可能な限り組み合わせることができる。
本開示によれば、作業者のスキルに頼ることなく、効率的な重機や電柱の配置を作業者に提示することができる経路計画装置及び経路計画方法を提供することができる。
以下、本開示の実施形態について、図面を参照しながら詳細に説明する。なお、本開示は、以下に示す実施形態に限定されるものではない。これらの実施の例は例示に過ぎず、本開示は当業者の知識に基づいて種々の変更、改良を施した形態で実施することができる。なお、本明細書及び図面において符号が同じ構成要素は、相互に同一のものを示すものとする。
本開示の経路計画装置の構成を図2に示す。図2において、経路計画装置10は、建柱位置及び障害物位置を取得する第一取得部11と、取得した建柱位置及び障害物位置を作業場所近辺のマップに当てはめ、取得した建柱位置から所定距離だけ離れた位置を中心に所定の広さの作業エリアを設定するマッピング部12と、作業エリアを分割する分割数を取得する第二取得部13と、第二取得部の取得する分割数に応じて分割した作業エリアに重機を配置する全ての座標と建柱する電柱を寝かせる全ての座標との組み合わせで、重機を配置する座標から建柱する電柱を寝かせる座標を経由して建柱する位置までの経路計画を生成し、それぞれの経路計画における探索成功確率及び経路移動時間を集約して点数化する計画部14と、重機を配置する座標ごとに集約した点数をヒートマップ表示する表示部15と、を備える。
本開示の経路計画装置の動作を図3に示す。図3において、本開示の経路計画装置の動作は、第一取得ステップ21と、マッピングステップ22と、第二取得ステップ23と、計画ステップ24と、表示ステップ25と、を備える。以下、図2及び図3を参照しながら説明する。
(第一取得ステップ)
作業者は作業場所の中の電柱を建てる建柱位置、既設の障害物や電柱設備等の障害物位置を入力する。経路計画装置10の第一取得部11は、入力された建柱位置及び障害物位置を取得する。経路計画装置10は、経路計画装置10の外部に、作業場所をスキャンするセンサ部(不図示)から障害物位置を取得してもよい。また、経路計画装置10は、作業場所をスキャンするセンサ部(不図示)を備え、センサ部が障害物位置をスキャンしてもよい。第一取得部11は、センサ部から障害物位置を取得することになる。センサ部が障害物位置をスキャンすれば、人手を介さず障害物位置を取得することができる。
作業者は作業場所の中の電柱を建てる建柱位置、既設の障害物や電柱設備等の障害物位置を入力する。経路計画装置10の第一取得部11は、入力された建柱位置及び障害物位置を取得する。経路計画装置10は、経路計画装置10の外部に、作業場所をスキャンするセンサ部(不図示)から障害物位置を取得してもよい。また、経路計画装置10は、作業場所をスキャンするセンサ部(不図示)を備え、センサ部が障害物位置をスキャンしてもよい。第一取得部11は、センサ部から障害物位置を取得することになる。センサ部が障害物位置をスキャンすれば、人手を介さず障害物位置を取得することができる。
第一取得部は、重機のサイズ及び寝かせる電柱のサイズをさらに取得してもよい。経路探索の際に、重機の通過できる箇所を正確に計算することができる。
(マッピングステップ)
経路計画装置10のマッピング部12は、取得した建柱位置及び障害物位置を作業場所近辺のマップに当てはめる。図4に建柱位置及び障害物位置を当てはめたマップを示す。図4において31は障害物位置、32は建柱位置である。図4では黒丸印の障害物位置31には既設の電柱、破線の障害物位置31には既設の電線が存在していることを表している。
経路計画装置10のマッピング部12は、取得した建柱位置及び障害物位置を作業場所近辺のマップに当てはめる。図4に建柱位置及び障害物位置を当てはめたマップを示す。図4において31は障害物位置、32は建柱位置である。図4では黒丸印の障害物位置31には既設の電柱、破線の障害物位置31には既設の電線が存在していることを表している。
次に、取得した建柱位置から所定距離だけ離れた位置を中心に所定の広さの作業エリアを設定する。図5に作業エリアを設定したマップを示す。図5では、図4に対して作業エリア33が設定されている。作業エリア33の中心は取得した建柱位置32から所定距離だけ離れた位置である。ここでは、作業エリア33を30m四方として、既設の電線の長手方向をX軸とし、建柱位置32からY軸方向に10mの位置を作業エリアの中心としている。これらの設定は例示である。
(第二取得ステップ)
作業者は作業エリアを分割する分割する分割数を入力する。第二取得部13は、入力された分割数を取得する。
作業者は作業エリアを分割する分割する分割数を入力する。第二取得部13は、入力された分割数を取得する。
(計画ステップ)
図6から図8を用いて計画ステップを説明する。図6から図8において、31は障害物位置、32は建柱位置、33は作業エリア、34は重機を配置する座標、35は電柱を寝かせる座標である。
図6から図8を用いて計画ステップを説明する。図6から図8において、31は障害物位置、32は建柱位置、33は作業エリア、34は重機を配置する座標、35は電柱を寝かせる座標である。
計画部14は、第二取得部13の取得した分割数に従って、図6に示すように作業エリアをマトリクス状に分割する。計画部14は、図7に示すように重機を配置する座標34を指定する。重機の先端を重機の座標とすることが好ましい。次に、計画部14は、図8に示すように建柱する電柱を寝かせる座標35を指定する。
この状態で、重機を配置する座標34から建柱する電柱を寝かせる座標35を経由して建柱する位置32までの経路計画を生成する。分割した作業エリア内で重機を配置する全ての座標と建柱する電柱を寝かせる全ての座標との組み合わせで経路計画を生成し、それぞれの経路計画における探索成功確率及び経路移動時間を計算する。図9に示すように、重機を配置する座標ごとに、建柱する電柱を寝かせる全ての座標でそれぞれ探索成功確率と経路移動時間を得る。
経路探索手法としては、ランダムサンプリング手法を用いたパスプラニングがある。具体的には、RRT(Rapidly Exploring Random Tree)やRRT*(Rapidly Exploring Random Tree Star)が例示できる。探索成功確率とは、重機を配置する座標から建柱する電柱を寝かせる座標を経由して建柱する位置までの経路の中で、経路探索が成功した回数を、経路探索を試みた回数で除算した割合をいう。経路探索が失敗した例としては、予め設定した計算時間内に、重機を配置する座標から建柱する電柱を寝かせる座標を経由して建柱する位置にまで到達しなかった場合や障害物のために経路が閉ざされた場合がある。探索回数は予め設定しておく。経路移動時間は、重機が、重機を配置する座標を出発してから建柱する電柱を寝かせる座標を経由して建柱する位置にまで到達するまでの所要時間をいい、経路長を所定の速度で除算した相対的な速度である。探索した分の中央値を経路移動時間としてもよい。また、探索した分の平均値を経路移動時間としてもよい。
第一取得部11が、重機のサイズ及び電柱のサイズを取得した場合は、障害物に対してこれらのサイズを考慮して経路探索することができる。重機のサイズとしては、全長、横幅、電柱を把持するアームの長さが例示できる。電柱のサイズとしては電柱の長軸方向の長さがある。重機を配置する座標から建柱する電柱を寝かせる座標までの経路は重機のサイズだけを考慮し、電柱を寝かせる座標から建柱する位置までの経路は重機のサイズ及び電柱のサイズを考慮してもよい。
計画部14は、生成したそれぞれの経路計画における探索成功確率及び経路移動時間を集約して点数化する。集約して点数化する例を図10に示す。図10に示すように、探索成功確率(Success Probability of Pass Planning)を0から4までの5段階にランク付けし、探索成功確率の高い経路を高く、探索成功確率の低い経路を低くランク付けする。経路移動時間(Trajectory Execution Time)を1から4までの4段階にランク付けし、経路移動時間の短い経路を高く、経路移動時間の長い経路を低くランク付けする。探索成功確率のランクと経路移動時間のランクの積を計算し、重機を配置する座標と電柱を寝かせる座標の組み合わせごとの点数とする。
(表示ステップ)
例えば、重機を配置する座標ごとに、電柱を寝かせる座標に対する点数を視覚化すると、図11のようになる。一定以上の良好な点数の得られた組合せについてだけ視覚化してもよい。この場合は、探索可能エリアとして電柱を寝かせる座標(白丸印)が得られる。表示部15は、重機を配置する座標(四角印)ごとに集約した点数をヒートマップ表示する。ヒートマップ表示の例を図12に示す。図12では、良好な点数の順に16、12、9としている。一定以上の良好な点数の得られた組合せについてだけヒートマップ化してもよい。例えば、図12のように9以上の点数である。
例えば、重機を配置する座標ごとに、電柱を寝かせる座標に対する点数を視覚化すると、図11のようになる。一定以上の良好な点数の得られた組合せについてだけ視覚化してもよい。この場合は、探索可能エリアとして電柱を寝かせる座標(白丸印)が得られる。表示部15は、重機を配置する座標(四角印)ごとに集約した点数をヒートマップ表示する。ヒートマップ表示の例を図12に示す。図12では、良好な点数の順に16、12、9としている。一定以上の良好な点数の得られた組合せについてだけヒートマップ化してもよい。例えば、図12のように9以上の点数である。
作業者は重機を配置する座標ごとのヒートマップを入手すると、最適な重機を配置する座標と電柱を寝かせる座標の組み合わせを選択することができる。作業者は、この配置を基に重機を操作する。重機は作業者の操作に従って動作する(図3の26)。
以上説明したように、本開示の経路計画装置及び経路計画方法によれば、作業者のスキルに頼ることなく、効率的な重機や電柱の配置を作業者に提示することができる。作業者は重機や電柱を配置する位置を事前に明確化することができ、建柱工事の時間短縮が可能になる。
本開示の経路計画装置はコンピュータとプログラムによっても実現でき、コンピュータに経路計画装置として機能させるプログラムを記録媒体に記録することも、ネットワークを通して提供することも可能である。
本開示は情報通信産業を始め各種産業に適用することができる。
10:経路計画装置
11:第一取得部
12:マッピング部
13:第二取得部
14:計画部
15:表示部
21:第一取得ステップ
22:マッピングステップ
23:第二取得ステップ
24:計画ステップ
25:表示ステップ
31:障害物位置
32: 建柱位置
33:作業エリア
34:重機を配置する座標
35:電柱を寝かせる座標
11:第一取得部
12:マッピング部
13:第二取得部
14:計画部
15:表示部
21:第一取得ステップ
22:マッピングステップ
23:第二取得ステップ
24:計画ステップ
25:表示ステップ
31:障害物位置
32: 建柱位置
33:作業エリア
34:重機を配置する座標
35:電柱を寝かせる座標
Claims (8)
- 建柱位置及び障害物位置を取得する第一取得部と、
取得した前記建柱位置及び前記障害物位置を作業場所近辺のマップに当てはめ、取得した前記建柱位置から所定距離だけ離れた位置を中心に所定の広さの作業エリアを設定するマッピング部と、
前記作業エリアを分割する分割数を取得する第二取得部と、
前記第二取得部の取得する分割数に応じて分割した前記作業エリア内で重機を配置する全ての座標と建柱する電柱を寝かせる全ての座標との組み合わせで、重機を配置する座標から建柱する電柱を寝かせる座標を経由して建柱する位置までの経路計画を生成し、それぞれの経路計画における探索成功確率及び経路移動時間を集約して点数化する計画部と、
重機を配置する座標ごとに集約した点数をヒートマップ表示する表示部と、
を備える経路計画装置。 - 前記計画部は、生成した経路計画で前記探索成功確率の高い経路を高くランク付けし、前記経路移動時間の短い経路を高くランク付けし、2つのランクに基づいて効率の良さで点数化することを特徴とする請求項1に記載の経路計画装置。
- 前記第一取得部は、重機のサイズ及び電柱のサイズをさらに取得し、
前記計画部は、前記重機のサイズ及び前記電柱のサイズを考慮して経路計画を生成することを特徴とする請求項1に記載の経路計画装置。 - 前記障害物位置をスキャンするセンサ部をさらに備え、
前記第一取得部は、前記センサ部から前記障害物位置を取得することを特徴とする請求項1に記載の経路計画装置。 - 経路計画装置が、
建柱位置及び障害物位置を取得する第一取得ステップと、
取得した前記建柱位置及び前記障害物位置を作業場所近辺のマップに当てはめ、取得した前記建柱位置から所定距離だけ離れた位置を中心に所定の広さの作業エリアを設定するマッピングステップと、
前記作業エリアを分割する分割数を取得する第二取得ステップと、
前記第二取得ステップで取得する分割数に応じて分割した前記作業エリア内で重機を配置する全ての座標と建柱する電柱を寝かせる全ての座標との組み合わせで、重機を配置する座標から建柱する電柱を寝かせる座標を経由して建柱する位置までの経路計画を生成し、それぞれの経路計画における探索成功確率及び経路移動時間を集約して点数化する計画ステップと、
重機を配置する座標ごとに集約した点数をヒートマップ表示する表示ステップと、
を実行する経路計画方法。 - 前記計画ステップでは、生成した経路計画で前記探索成功確率の高い経路を高くランク付けし、前記経路移動時間の短い経路を高くランク付けし、2つのランクに基づいて効率の良さで点数化することを特徴とする請求項5に記載の経路計画方法。
- 前記第一取得ステップでは、重機のサイズ及び電柱のサイズをさらに取得し、
前記計画ステップでは、前記重機のサイズ及び前記電柱のサイズを考慮して経路計画を生成することを特徴とする請求項5に記載の経路計画方法。
経路計画方法。 - コンピュータに請求項1に記載の経路計画装置として機能させるためのプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/026868 WO2024009439A1 (ja) | 2022-07-06 | 2022-07-06 | 経路計画装置及び経路計画方法 |
| PCT/JP2023/001347 WO2024009537A1 (ja) | 2022-07-06 | 2023-01-18 | 経路計画装置及び経路計画方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/026868 WO2024009439A1 (ja) | 2022-07-06 | 2022-07-06 | 経路計画装置及び経路計画方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024009439A1 true WO2024009439A1 (ja) | 2024-01-11 |
Family
ID=89453058
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/026868 WO2024009439A1 (ja) | 2022-07-06 | 2022-07-06 | 経路計画装置及び経路計画方法 |
| PCT/JP2023/001347 WO2024009537A1 (ja) | 2022-07-06 | 2023-01-18 | 経路計画装置及び経路計画方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/001347 WO2024009537A1 (ja) | 2022-07-06 | 2023-01-18 | 経路計画装置及び経路計画方法 |
Country Status (1)
| Country | Link |
|---|---|
| WO (2) | WO2024009439A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008217066A (ja) * | 2007-02-28 | 2008-09-18 | Lexer Research Inc | 作業計画立案支援システム |
| JP2010146456A (ja) * | 2008-12-22 | 2010-07-01 | Chugoku Electric Power Co Inc:The | 移設対象支持物の総合移設状況進捗管理システムおよび方法 |
| JP2016132538A (ja) * | 2015-01-20 | 2016-07-25 | 株式会社日立製作所 | 搬入据付け作業計画支援装置および搬入据付け作業計画支援方法 |
| WO2021049112A1 (ja) * | 2019-09-11 | 2021-03-18 | コベルコ建機株式会社 | シミュレーション装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0724386Y2 (ja) * | 1989-12-20 | 1995-06-05 | 株式会社アイチコーポレーション | 作業車停止位置適正化装置 |
| JPH03271871A (ja) * | 1990-03-20 | 1991-12-03 | Fujitsu Ltd | 線分データ処理方式 |
| JPH0921231A (ja) * | 1995-07-04 | 1997-01-21 | Hitachi Plant Eng & Constr Co Ltd | 作業時間算出方法 |
| JP7132821B2 (ja) * | 2018-10-31 | 2022-09-07 | 株式会社アイチコーポレーション | 作業車の安全装置 |
| JP7423389B2 (ja) * | 2020-04-01 | 2024-01-29 | 東北電力株式会社 | 作業支援装置 |
-
2022
- 2022-07-06 WO PCT/JP2022/026868 patent/WO2024009439A1/ja unknown
-
2023
- 2023-01-18 WO PCT/JP2023/001347 patent/WO2024009537A1/ja unknown
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008217066A (ja) * | 2007-02-28 | 2008-09-18 | Lexer Research Inc | 作業計画立案支援システム |
| JP2010146456A (ja) * | 2008-12-22 | 2010-07-01 | Chugoku Electric Power Co Inc:The | 移設対象支持物の総合移設状況進捗管理システムおよび方法 |
| JP2016132538A (ja) * | 2015-01-20 | 2016-07-25 | 株式会社日立製作所 | 搬入据付け作業計画支援装置および搬入据付け作業計画支援方法 |
| WO2021049112A1 (ja) * | 2019-09-11 | 2021-03-18 | コベルコ建機株式会社 | シミュレーション装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2024009537A1 (ja) | 2024-01-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN201402324Y (zh) | 高压架空输电线路机载三维激光雷达检测系统 | |
| KR20200103561A (ko) | 운전 경로 계획 방법, 장치 및 차량 | |
| KR20060002964A (ko) | 윈도우 스택 제어방법, 윈도우 관리 프로그램, 및 윈도우관리장치 | |
| JP2003202232A (ja) | ナビゲーション装置及び地図表示装置 | |
| CN110132291A (zh) | 用于港口的栅格地图生成方法、系统、设备及存储介质 | |
| CN109489664A (zh) | 一种路径规划的方法和设备 | |
| CN113033508B (zh) | 一种基于点云的精细巡检航点快速生成方法 | |
| CN109269505A (zh) | 一种电网设备巡检线路智能规划方法 | |
| CN110942660B (zh) | 电力作业绝缘斗臂车辅助停车系统及其停车位置搜索方法 | |
| WO2022121288A1 (zh) | 核电厂房三维寻路导航方法及系统 | |
| JP2018031693A (ja) | 架空送電線の離隔評価方法,離隔評価装置,及び離隔評価プログラム、並びに、離隔評価データの表示方法 | |
| WO2024009439A1 (ja) | 経路計画装置及び経路計画方法 | |
| CN116091039A (zh) | 基于南网智瞰的输变电工程验收成果可视化方法及系统 | |
| WO2022068781A1 (zh) | 一种引导建图方法、设备及计算机可读存储介质 | |
| KR102139716B1 (ko) | Tbm 운용 시뮬레이션 장비 및 이를 이용하여 tbm 기기 운용 능력을 측정하는 방법 | |
| CN106772425A (zh) | 数据处理方法和装置 | |
| AU2022275523A1 (en) | Information processing method and system | |
| CN105279305A (zh) | 一种地面三维激光扫描技术测站选取方法 | |
| WO2024009431A1 (ja) | 経路計画装置及び経路計画方法 | |
| KR100581380B1 (ko) | 다수의 측량 장치로부터 전송된 측량값을 이용한 작도 방법 | |
| JP4071614B2 (ja) | 測量装置 | |
| JP3353212B2 (ja) | 引出線自動作成方法および引出線自動作成システム | |
| JP6697296B2 (ja) | トラバース測量のデータ管理装置 | |
| JP2017172977A (ja) | トラバース測量データ処理装置 | |
| JP2777628B2 (ja) | 図形処理方法及び装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22950233 Country of ref document: EP Kind code of ref document: A1 |