WO2023210823A1 - 振動アクチュエータ及び接触型入力装置 - Google Patents
振動アクチュエータ及び接触型入力装置 Download PDFInfo
- Publication number
- WO2023210823A1 WO2023210823A1 PCT/JP2023/016957 JP2023016957W WO2023210823A1 WO 2023210823 A1 WO2023210823 A1 WO 2023210823A1 JP 2023016957 W JP2023016957 W JP 2023016957W WO 2023210823 A1 WO2023210823 A1 WO 2023210823A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- plate
- vibration actuator
- core
- coil
- vibration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images












































































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B06—GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS IN GENERAL
- B06B—METHODS OR APPARATUS FOR GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS OF INFRASONIC, SONIC, OR ULTRASONIC FREQUENCY, e.g. FOR PERFORMING MECHANICAL WORK IN GENERAL
- B06B1/00—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency
- B06B1/02—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of electrical energy
- B06B1/04—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of electrical energy operating with electromagnetism
- B06B1/045—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of electrical energy operating with electromagnetism using vibrating magnet, armature or coil system
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/016—Input arrangements with force or tactile feedback as computer generated output to the user
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K33/00—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system
- H02K33/02—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system with armatures moved one way by energisation of a single coil system and returned by mechanical force, e.g. by springs
Definitions
- the present invention relates to a vibration actuator and a contact type input device equipped with the same.
- Patent Document 1 a configuration has been known in which a vibration actuator applies vibration to the pad of a finger of an operator who has touched a display screen displayed on a touch panel, which is a sensing panel, as a touch operation feeling (a feeling of touching and operating).
- Patent Document 1 discloses a mobile terminal device in which a vibration actuator is attached to the back surface of a touch panel via a vibration transmission section.
- a vibration actuator of this device a movable element is arranged in a housing fixed to a vibration transmitting part so as to be reciprocating along a guide shaft arranged perpendicularly to the touch panel.
- the movable element collides with the housing in response to an operation on the touch panel, which may generate a collision sound, but it does not apply vibration to the pad of the finger that contacts the touch panel via the vibration transmission part. ing.
- the movable element is reciprocated along a guide shaft arranged perpendicular to the display surface of the touch panel, so the device itself has a length perpendicular to the display surface. , that is, the structure has a thickness.
- This configuration requires an arrangement space for a predetermined thickness on the back side of the touch panel, and there is a problem that the mobile terminal device itself equipped with the touch panel becomes large.
- the movable element includes a magnet and two yokes sandwiching the magnet
- the stator includes a bobbin surrounding the movable body and two coils wound around the bobbin. It takes time to assemble. Therefore, there is a desire to further reduce the number of parts and improve assembly efficiency.
- An object of the present invention is to provide a vibration actuator and a contact type input device that are easy to assemble, are arranged in a small space, and vibrate suitably.
- the vibration actuator of the present invention includes: a magnetic plate, an electromagnet arranged on the plate and having a coil arranged in the center of the core; an elastic body supporting the core on both sides of the coil and connected to the plate; A configuration is adopted in which one of the coil or the plate is displaced to approach the other and vibrates due to the magnetic force generated by energizing the coil.
- the contact input device of the present invention includes: A contact type input device in which a vibration actuator having the above configuration is arranged on the back side of an operation surface, The coil is energized in response to the operator's touch action on the operation surface, and one of the coil or the plate is displaced and vibrated to approach the other, thereby presenting a tactile sensation to the operator.
- the present invention it is easy to assemble, and it can be arranged in a small space and vibrate suitably.
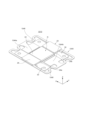
- FIG. 1 is an exploded perspective view of a vibration actuator according to an embodiment of the present invention. It is an exploded perspective view showing the relationship between a movable part and an elastic support part in a vibration actuator concerning one embodiment of the present invention.
- FIGS. 11A, 11B, and 11C are diagrams for explaining the operation of the vibration actuator. It is a figure showing an example of the drive circuit of an actuator main part.
- FIG. 1 is an external perspective view showing an example of a vibration presentation device having a vibration actuator.
- FIG. 2 is a schematic side sectional view showing the main part configuration of the vibration presentation device.
- FIGS. 15A and 15B are diagrams showing tactile sensations provided by the vibration presentation device in time series. It is a schematic side sectional view showing a modification of the same vibration presentation device.
- the width, depth, and height of the vibration presentation device (contact type input device) 1 having the vibration actuator 10 are the lengths in the X direction, Y direction, and Z direction, respectively, and the width and depth of the vibration actuator 10 are the lengths in the X direction, Y direction, and Z direction, respectively.
- the heights correspond to the lengths in the X direction, Y direction, and Z direction.
- the positive side in the Z direction is the direction in which vibration feedback is given to the operator (operator), and is defined as the “flat side” (or “upper side")
- the negative side in the Z direction is the direction in which the operator presses when operating. direction, and will be described as the “bottom side” (or “lower side”).
- the surface on the "plane side” is referred to as the “front surface” (or “upper surface")
- the surface on the "back side” or “lower side”
- the surface will be described as the “back surface” (or "bottom surface”).
- the vibration actuator 10 is a vibration presentation device (see FIG. 13)).
- the vibration actuator 10 vibrates the operating device, thereby imparting a touch operation feeling (also referred to as "tactile sensation” or “force sensation”) to the operator who touches and operates the operating device, depending on the purpose and usage status of the operating device. can do.
- a touch operation feeling also referred to as "tactile sensation” or “force sensation”
- the vibration actuator 10 is a thin vibration actuator in the form of a flat plate or a thin plate, and if the Z direction is the thickness direction, it is disposed opposite to the back side of the operating device in the thickness direction so that the operating device can vibrate.
- the vibration actuator 10 is formed into a thin plate shape, and includes a movable part 20, a base part (hereinafter also referred to as a "base plate") 30, and an elastic support that supports the movable part 20 movably with respect to the base part 30. It has a plate-like elastic part 40 as a part (elastic body).
- the elastic support part is made into the plate-shaped elastic part 40, it is not limited to a plate-shape as long as it supports the movable part 20 movably with respect to the base part 30.
- the vibration actuator 10 can be connected via one of the movable part 20 and the base part 30 to a vibration presentation part (for example, the pad main bodies 110 and 110A shown in FIGS. 14 to 16) that receives a user's pressing operation. .
- a vibration presentation part for example, the pad main bodies 110 and 110A shown in FIGS. 14 to 16
- the vibration actuator 10 allows the movable part 20 to vibrate by moving towards and away from the base part 30 in the Z direction, specifically towards the base part 30 side, so that the vibration can be absorbed by the operation to which the vibration actuator 10 is attached. Gives a sense of operation to the device.
- the movable part 20 is formed into a rectangular plate shape and includes a coil 22, a core 24, and a weight part 26.
- the coil is formed into a flat shape and is arranged so as to surround the center portion of the core 24.
- the coil 22 is disposed around the outer periphery of the central portion of the core 24 with an insulating material interposed therebetween.
- the insulating material may be, for example, a coating agent that is applied to the core 24 and hardened, or may be configured as a bobbin-shaped insulating member and interposed between the coil 22 and the core 24.
- a resin material such as polybutylene terephthalate (PBT) is used, thereby ensuring electrical insulation between the coil 22 and the core 24.
- the core (magnetic core) 24 is a magnetic material, and both ends 24a and 24b in the direction of the winding axis protrude from the coil 22, that is, both ends 24a and 24b protrude from the coil 22 being wound.
- Spring connecting parts 241 and 242 are provided at the tips of both ends 24a and 24b of the core 24, respectively, to be joined to the elastic support parts.
- the core 24 is formed into a rectangular plate shape, and both end portions 24a and 24b each have a wide rectangular plate shape, and face the base portion 30 on the back side.
- a weight portion 26 extending over the spring connection portions 241 and 242 is attached to the surfaces of both end portions 24a and 24b.
- the weight portion 26 is plate-shaped and provided corresponding to the shape of the core 24, for example, the width (length in the X direction) and the length in the depth direction (length in the Y direction).
- the weight can be set arbitrarily, and can be adjusted by, for example, adjusting the length of the weight portion 26 in the Y direction, adjusting the length in the Z direction, or adjusting the material. In this way, the weight part 26 can adjust the weight of the movable part 20, and by this adjustment, the natural frequency can be set. Note that if the thickness (Z direction) arrangement space is limited, a shape may be used in which the weight increases in the XY directions.
- the weight unit 26 is attached to the weight via a fixing material such as an adhesive, a fixing member, or an adhesive material. It is preferable that a vibration presentation section is attached to the section 26.
- the core 24 is magnetized by energizing the coil 22 and functions as an electromagnet. Both end portions 24a and 24b serve as magnetic poles, and generate a magnetic attraction force between them and the adjacent magnetic body, that is, the base portion 30.
- the core 24 is preferably formed of a soft magnetic material such as a silicon steel plate, permalloy, or ferrite.
- the core 24 may be made of electromagnetic stainless steel, sintered material, MIM (metal injection mold) material, laminated steel plate, electrogalvanized steel plate (SECC), or the like.
- the base portion 30 supports the movable portion 20 so as to be movable in the approaching and separating direction of the base portion 30, in the Z direction in FIG. 1, via the plate-like elastic portion 40.
- the base portion 30 includes opposing portions 32a and 32b, which are magnetic materials, which are arranged to face both ends 24a and 24b of the core 24 with a gap G in the opposite direction intersecting the winding axis direction of the coil 22. has.
- the base portion 30 is a flat member having a predetermined thickness in the Z direction, and forms the bottom surface of the vibration actuator 10.
- the base part 30 has a base main body part 31 which is a magnetic material, and the base main body part 31 includes opposing parts (magnetic material) 32a and 32b arranged to face both ends 24a and 24b, and an elastic part connecting part. Certain spring connections 34a, 34b and a fixing part 36 are provided.
- the base main body portion 31 has an opening 38 in the center and is formed into a square frame shape in plan view.
- the opening 38 is a space into which the lower part of the coil 22 is inserted, and has a shape corresponding to the outer shape of the coil 22, for example, a square shape.
- opposing portions 32a and 32b are formed on each of a pair of side portions 311 facing and spaced apart from each other, and between the pair of side portions 311, another pair of side portions 312 facing and spaced apart from each other are formed.
- Spring fixing portions 34a and 34b are formed in each of the spring fixing portions 34a and 34b.
- the opposing parts 32a, 32b and the spring fixing parts 34a, 34b are each formed on the surface of the base main body part 31, that is, the surface on the movable part side.
- the pair of sides 311 and the other pair of sides 312 are each planar, and cutouts 311a and 312a are formed in the center of the four outer edges that make up the outer periphery of the base body 31, respectively. has been done.
- the cutout portions 311a and 312a are each provided to secure a partial deformation region of the plate-like elastic portion 40 to be placed.
- the opposing parts (opposing surfaces) 32a and 32b are part of the base part 30, and have a gap in the opposite direction intersecting the winding axis direction of the coil 22, for example, in the Z direction, with respect to both ends 24a and 24b of the core 24.
- the opposing parts 32a, 32b are attracted to both ends 24a, 24b by magnetic attraction force generated between the opposite sides of the ends 24a, 24b when the coil 22 is energized.
- the opposing portions 32a and 32b are formed, for example, at the center of each of the pair of side portions 311, and are positioned to sandwich the opening 38 in the Y direction.
- the opposing parts 32a and 32b are part of the base body part 31 and are made of ferromagnetic material, such as iron (Fe), cobalt (Co), nickel (Ni), gadolinium (Gd), or the like.
- the opposing parts 32a, 32b, together with the spring connecting parts 34a, 34b and the fixing part 36, are formed as the base main body part 31, particularly from a metal material (for example, iron) such as iron, cobalt, or nickel.
- Both end portions 24a and 24b are arranged to face each other apart from each other above the opposing portions 32a and 32b (in the Z direction), and are symmetrical about the centers in the X direction and the Y direction.
- the spring connecting parts 34a and 34b are arranged so as to sandwich the opening 38 in the X direction, and are joined to the other end of the plate-like elastic part 40 on the surface side of the base part 30.
- the fixing part 36 fixes the base part 30.
- the fixing part 36 is attached to an operating device (vibration presentation section) that is touched and operated by the operator, or a casing (arrangement section) in which the operating device is arranged, via a fastening member (for example, a screw 170 shown in FIG. 13). ) (see FIGS. 2, 3, and 13).
- the fixing parts 36 are formed at the four corners of the base part 30, and can securely attach and fix the base part 30 to the object to be fixed. Although the fixing parts 36 are formed at the four corners, the number of fixing parts 36 may be any number as long as the base part 30 can be fixed to the object to be fixed.
- the plate-shaped elastic part 40 is plate-shaped, specifically, is a plate spring that is elastically deformed, and supports the movable part 20 movably with respect to the base part 30.
- the plate-like elastic part 40 is formed in the shape of a thin plate frame having a predetermined thickness (thickness in the Z direction), and is arranged in a layer between the base part 30 and the movable part 20 in the thickness direction (Z direction).
- the plate-like elastic part 40 is connected to each of the movable part 20 and the base part 30.
- the plate-like elastic part 40 is formed in a frame shape surrounding the base part 30, and the movable part 20 is joined to each of a pair of mutually parallel side parts 461.
- the base portion 30 is joined to each of the pair of side portions 462 .
- the plate-like elastic part 40 moves the movable part 20 in the directions (X direction and Y direction) perpendicular to the direction (vibration direction) facing the base part 30. ) to support it in a symmetrical and well-balanced manner.
- the plate-like elastic part 40 is a rectangular frame body (here, a thin plate frame body), the number of parts can be reduced and the overall thickness can be reduced, and furthermore, it can be manufactured without bending parts etc. . Furthermore, since it is a frame, other parts can be placed within the frame so as not to interfere with other parts.
- the plate-like elastic part 40 can determine the amount of displacement and natural frequency of the movable part 20 by setting the spring constant Ksp , and when driving the movable part 20, that is, when energizing the coil 22, The displacement produces a mechanical tactile sensation.
- the plate-shaped elastic part 40 connects the movable part side fixed parts 42a, 42b, the base part side fixed parts 44a, 44b, and the movable part side fixed parts 42a, 42b and the base part side fixed parts 44a, 44b, and is elastically deformed. It has a planar elastic main body part 46 including an arm.
- the elastic main body portion 46 connects the movable portion side fixing portions 42a, 42b and the base portion side fixing portions 44a, 44b so as to be elastically deformable in the Z direction.
- the elastic main body portion 46 has a deformable arm portion that connects the movable portion side fixing portions 42a, 42b and the base portion side fixing portions 44a, 44b.
- the arm part is formed into an L-shape, so that it has a frame shape that surrounds the base part 30 in plan view, and is deformable in the Z direction on the outer peripheral side of the base part 30.
- the movable portion side fixing portions 42a and 42b and one side of the L-shaped arm linearly connected to these constitute a pair of mutually parallel side portions 461, and a side portion adjacent to these pair of side portions 461
- Base portion side fixing portions 44a and 44b are formed on the other pair of matching side portions 462 so as to protrude inwardly.
- the elastic main body part 46 In the plate-shaped elastic part 40, the elastic main body part 46, the movable part side fixing parts 42a and 42b, and the base part side fixing parts 44a and 44b are arranged on the same plane.
- the movable part side fixing parts 42a and 42b are planar and fixed to the movable part 20.
- the movable part side fixing parts 42a and 42b are provided at the center of a pair of side parts 311 arranged on the outside of the base part 30 in the elastic main body part 46 when viewed from above, and are attached to the spring connection part of the core 24 on the surface. It is fixed in surface contact with 241 and 242 on the back side.
- the movable part side fixing parts 42a and 42b are provided so as to be symmetrical in each direction with respect to the center in the X direction or the center in the Y direction.
- the base-side fixing parts 44a and 44b have a planar shape and are fixed to the base part 30.
- the plate-shaped elastic part 40 has an arm of the elastic main body part 46 in order to ensure elasticity, and this arm shape allows the movable part side fixing parts 42a, 42b and the base part side fixing parts 44a, 44b to be displaced in the Z direction. Any shape may be used as long as it can be freely connected. Further, the elastic main body portion 46 may have any shape as long as it is formed to deform in a well-balanced manner so as to move the movable portion 20 in the Z direction (vibration imparting direction) with the movable portion 20 positioned on the XY plane. .
- the plate-like elastic portion 40 is configured such that the back surfaces of both ends of the movable portion 20 and the opposing portions 32a and 32b of the base portion 30 face each other with a gap G in the vibration direction (Z direction) that is perpendicular to each other.
- the movable part 20 is supported.
- the plate-like elastic portion 40 forms a gap G depending on its thickness (length in the Z direction).
- the plate-like elastic portion 40 deforms between the top surface of the core 24 or coil 22 and the bottom surface of the base portion 30.
- the plate-like elastic part 40 is formed into a rectangular frame shape, and the movable part side fixing parts 42a, 42b and the base part side fixing parts 44a, 44b are located in the center of each side of the rectangular frame. It is located.
- the movable part 20 is driven, the movable part side fixing parts 42a and 42b are displaced with respect to the base part side fixing parts 44a and 44b.
- the movable part 20 is supported on both sides of the elastic main body part 46 by L-shaped arms that connect to the movable part side fixing parts 42a, 42b and the base part side fixing parts 44a, 44b. Therefore, it is possible to disperse stress during elastic deformation, and the movable part 20 can be moved in the vibration direction (Z direction) without tilting with respect to the base part 30, improving the reliability of the vibration state. Stability can be improved.
- FIGS. 11A to 11C are diagrams for explaining the operation of the vibration actuator. Note that FIGS. 11A to 11C are perspective views of the vibration actuator 10 showing a section taken along line BB in FIG. has.
- FIG. 11A is a diagram showing a resting state of the vibration actuator 10 (located at a resting position SI).
- a current is applied to the coil 22 of the vibration actuator 10 shown in FIG. 11A
- the core 24 is excited to generate a magnetic field, and both ends 24a and 24b of the core 24 become magnetic poles.
- FIG. 11B in the core 24, one end 24a is the north pole, and the other end 24b is the south pole.
- a magnetic circuit indicated by the flow M of magnetic flux is formed between the core 24 and the opposing parts 32a and 32b of the base part 30.
- a flow M of magnetic flux in this magnetic circuit flows from one end portion 24a to the opposing portion 32a, reaches the opposing portion 32b from the opposing portion 32a, flows from the opposing portion 32b to the other end portion 24b of the core 24, and flows through the core 24.
- the light is emitted again from one end 24a.
- both ends 24a and 24b of the core 24 generate a magnetic attraction force KR according to the principle of an electromagnetic solenoid. Then, both end portions 24a and 24b are attracted to both opposing portions 32a and 32b of base portion 30. Since the base portion 30 is fixed to a casing or the like via the fixing portion 36, both ends 24a and 24b are attracted and attracted to the opposing portions 32a and 32b. That is, the plate-like elastic portion 40 is deformed and the movable portion 20 is drawn toward the base portion 30 side. The movable part 20 is arranged close to the position (KI) where the base part 30 is fixed.
- the movable portion 20 may be moved back and forth in the Z direction by repeatedly energizing and releasing the current to the coil 22 to generate vibrations.
- the vibration actuator 10 when the movable part 20, which is supported in a suspended state with respect to the base part 30 by the plate-like elastic part 40, is energized, the electromagnet and the opposing parts 32a and 32b, which are magnetic bodies, are connected. Due to the generated magnetic attraction force, it is mechanically displaced and then freely vibrates.
- the vibration actuator 10 causes the movable part 20 to move toward the base part 30 due to the magnetic attraction force generated between the core 24 and the opposing parts (magnetic bodies) 32a and 32b when the coil 22 is energized. let This movement causes the movable part 20 to vibrate due to the elastic force (biasing force) generated in the plate-like elastic part 40, giving a tactile sensation to the user.
- the core 24 around which the coil 22 is wound is movable in the Z direction with respect to the base part 30 by the plate-shaped elastic part 40 with the coil 22 inserted through the opening 38 of the base part 30.
- the vibration actuator 10 can be configured with only the height of the thin plate-shaped core 24, the portion of the coil 22 on the core 24, the plate-shaped elastic part 40, and the base part 30 stacked together.
- the vibration actuator 10 can be configured in a thin plate shape, and the installation space can be saved.
- this configuration is compared to a configuration in which members that generate magnetism and drive a movable part in the Z direction are stacked in the Z direction, such as arranging a coil and a magnet facing each other in the Z direction. It has an even thinner structure.
- the plate-shaped core 24 is disposed perpendicularly facing the opposing parts 32a and 32b of the base part 30, and the movable part 20 is a plate that is a plate spring disposed between the core 24 and the base part 30. It is held movably in the vertical direction (vibration direction) via a shaped elastic part 40. Thereby, the core 24 is supported so as to be able to freely vibrate with respect to the base portion 30 with a space equal to the thickness of the plate-like elastic portion 40 being secured as a gap for vibration.
- the base portion 30 has a plate shape provided with an opening 38 through which the coil 22 is inserted so as to be movable in opposite directions.
- a vibration presentation part for example, the pad main body 110, 110A in FIGS. 14 to 16
- a fixing portion 36 is provided for fixing to the bottom portion 120 of FIGS. 14-16, for example.
- the plate-like elastic part 40 extends so as to surround the base part 30 on the outside of the fixing part 36. Thereby, the plate-like elastic part 40 can be elastically deformed without interfering with the fixation of the base part 30, and the stroke for the elastic deformation can be secured.
- the vibration actuator 10 all components such as the base part 30, the plate-like elastic part 40, the movable part 20, and the weight part 26 are assembled in the Z direction, that is, in the thickness direction, so that they can be easily assembled. Therefore, it is possible to manufacture a vibration actuator that is driven stably and with little variation during assembly.
- the vibration actuator 10 has a configuration in which the distance between the core 24 and the base portion 30 is ensured by the thickness of the plate-like elastic portion 40. This eliminates the need to provide a separate member to form the distance between the core 24 and the base portion 30, further reducing the number of parts, reducing size, simplifying assembly, and lowering costs. can be achieved.
- the plate-shaped elastic part 40 is a plate spring with high thickness precision during manufacture, variations in the gap between the core 24 and the base part 30 (specifically, the opposing parts 32a and 32b) are suppressed. and is secured as a stable gap. Since the surfaces of both end portions 24a and 24b of the core 24 are exposed, the weight on the movable portion 20 side can be easily increased using the surface space.
- vibration is generated by moving the movable part 20 in a reciprocating straight line without using a magnet
- the cost can be reduced compared to a configuration using a magnet.
- the number of parts can be reduced and manufacturing can be facilitated.
- the vibration actuator 10 it is easy to assemble and is thin, so it can be placed in a space-saving manner and vibrates suitably. Further, the vibration actuator 10 can be made thinner and smaller, and can provide a suitable tactile sensation corresponding to the user's pressing operation on the vibration presentation section.
- the vibration actuator 10 can also be driven by generating a resonance phenomenon using pulses using the following equation of motion and circuit equation. Note that the operation is not a resonance drive, but expresses the feeling of operation with a trackpad (see FIG. 13) as the vibration presentation device 100. For example, a current pulse (single or plural It may also be driven by inputting a value (good).
- the movable part 20 in the vibration actuator 10 performs reciprocating motion based on equations (1) and (2).
- the vibration in the vibration actuator 10 is determined by the mass m of the movable part 20 and the spring constant K sp of the metal spring (a plate spring in this embodiment) as the plate-like elastic part 40. Further, the vibration generated by the vibration actuator 10 can be set by the input voltage (pulse) and the degree of damping of the vibration damping part (such as the damper part 190 shown in FIG. 14) if there is a vibration damping part (such as the damper part 190 shown in FIG. 14).
- the base portion 30 and the plate-like elastic portion 40 are joined together, and the plate-like elastic portion 40 and the movable portion 20 are joined together using an adhesive as a fixing member, welding, or the like. It is fixed.
- a screw may be used as the fastening member.
- FIG. 12 shows an example of a drive circuit for the actuator body.
- the drive circuit shown in FIG. 12 is included in the control section, for example.
- the drive circuit is a switching element 12 as a current pulse supply unit (Signal Generat Department (Signal Generat) (Signal Generat) (Signal Generat). Ion) 14, resistance R1, R2, It has SBD (Schottky Barrier Diodes).
- the signal generating section 14 connected to the power supply voltage Vcc is connected to the gate of the switching element 12.
- the switching element 12 is a discharge changeover switch.
- the switching element 12 is connected to the vibration actuator 10 (indicated by [Actuator] in FIG. 12) and the SBD, and is also connected to the vibration actuator 10 to which voltage is supplied from the power supply unit Vact.
- the vibration actuator 10 When the input of the actuator drive signal is stopped, the vibration actuator 10 releases the biasing force and moves the movable part 20 in the other direction (positive side in the Z direction) by the biasing force.
- the vibration actuator 10 vibrates the movable part 20 by inputting and stopping an actuator drive signal.
- the vibration actuator 10 vibrates the movable part 20 without using a magnet.
- the actuator drive signal corresponds to a drive current pulse (also referred to as a "current pulse") that is supplied to the coil 22 as a drive current that drives the movable part and the operating device.
- a drive current pulse also referred to as a "current pulse”
- the movable part 20 moves in one direction due to the magnetic attraction force between the electromagnet of the movable part 20 and the opposing parts 32a and 32b of the base part 30. Displace mechanically, stop feeding and then allow free oscillation. The vibrations generated by this are applied to the operating device.
- the plate-like elastic part 40 can control displacement and free vibration period due to magnetic attraction force.
- the actuator drive signal is generated by inputting a signal from a detection unit that detects an operation by an operator.
- the detection unit may be, for example, a pressure-sensitive sensor that detects the pressure caused by the operator's operation as a pressure signal, converts the pressure signal into an electrical signal, and outputs the electrical signal.
- the detection unit is a capacitive type, or detects the position of the operator's finger (pressing object) that presses the vibration presentation unit by detecting capacitive coupling between the finger and the operator's finger. It may also be a proximity sensor or the like that detects.
- FIG. 13 is a plan view showing an example of a vibration presentation device having a vibration actuator. Note that in FIG. 13, for convenience, the planar trackpad main body that the operator presses with his/her finger is shown transparently.
- the vibration presentation device 100 is, for example, a track pad as a pointing device used in place of a mouse in a notebook computer or the like.
- a trackpad serving as the vibration presentation device 100 is placed in a rectangular opening provided in a casing of a notebook computer or the like.
- the track pad includes a plate-shaped pad body 110 that can be traced with a finger as a touch operation, a vibration actuator 10 disposed on the back surface of the pad body 110, and a frame portion 130 surrounding the vibration actuator 10.
- the vibration actuator 10 applies vibration that provides a tactile sensation.
- the vibration actuator 10 in the track pad is attached to directly drive the pad body 110 together with the movable part 20 to apply vibration.
- the base part 30 is fixed to the bottom part 120 of the opening of the casing via screws 170 as fastening materials, and the movable part 20 is fixed to the pad main body 110 side. ing.
- the pad main body 110 is arranged on the bottom part 120 via a frame part 130 arranged so as to surround the vibration actuator 10.
- the pad main body 110 is placed on the movable part 20, and is fixed to the weight part 26 of the movable part 20 at the center via a double-sided tape 160 as a fixing material.
- the outer peripheral portion of the pad body 110 is attached to the frame portion 130 via a damper portion (buffer portion) 190 so that the pad body 110 is movable relative to the housing.
- the damper portion 190 is made of, for example, an elastomer, but may be made of any other material as long as it supports the pad body 110 so that it can be displaced as the vibration actuator 10 is driven.
- FIG. 15 is a diagram showing a time-series image of the tactile sensation provided by the vibration presentation device 100.
- FIG. 15A shows a time-series relationship among the input voltage, the acceleration of the movable part 20, and the displacement of the movable part 20 when a tactile sensation occurs
- FIG. 15B is a schematic diagram showing a specific operating state corresponding to FIG. 15A.
- On the track pad as the vibration presentation device 100 an operation of tracing the pad body 110 with a finger or a tapping operation such as a click is performed.
- a strain sensor serving as a pressure-sensitive sensor detects the strain in this operation.
- a signal (actuator drive signal) is output to the vibration actuator by pressure sensing (see input voltage in FIG. 15A), and the movable part 20 and the pad body attached to the movable part 20 110 starts moving in the pushing direction (-Z direction).
- the vibration actuator 10 is driven in the pushing direction.
- the vibration actuator 10 increases the acceleration of the movable part 20 and the pad body 110 in the pushing direction, and the pad body 110 is displaced in the pushing direction, that is, the direction in which the pad body 110 is pushed down, and the lowest point (S0 -p) is reached.
- an operational feeling such as a pressing feeling is given to the operator's finger.
- the reaction force of the plate-like elastic portion 40 causes the pad to move to a position (displacement Sp-p) above the operation reference position (same as the rest position SI in FIG. 11), which is the initial position.
- Main body 110 moves.
- a gap is created due to the difference in vectors (V1, V2) between acceleration and displacement, and a strong tactile sensation can be imparted to the finger, and a tactile sensation corresponding to the operation can be imparted to the operation target.
- V1, V2 vectors
- the base portion 30 is fixed to the bottom portion 120 which is a highly rigid placement portion of the trackpad housing, vibrations propagated from the movable portion 20 to the bottom portion (placement portion) 120 via the base portion 30 are The reaction force is canceled out and propagated to the pad main body 110 side as vibration. The vibrations generated in this way are efficiently transmitted to the user's finger side.
- the damper part 190 is connected to the pad body 110 and maintains its state. is preferably provided between the frame portion 130 in a previously crushed state, that is, in a contracted state. As a result, vibration amplification and vibration damping effects can be produced using the repulsive force of the damper portion 190.
- the vibration actuator 10 may be attached so as to indirectly drive the pad body 110 via the movable part 20 to apply vibration.
- FIG. 16 is a schematic side sectional view showing a modification of the vibration presentation device.
- the track pad as the vibration presentation device 100A is the vibration presentation device 100 in which the base portion of the vibration actuator 10 is attached to the pad body 110.
- a frame 130 is placed on the bottom 120 of the opening of the housing, and a flexible pad body 110A is placed on the frame 130.
- the base portion 30 of the vibration actuator 10 is fixed to the back surface of the pad body 110A via screws 170 inserted into the fixing portion 36.
- the vibration actuator 10 is arranged with the movable part 20 facing downward, and a gap is formed between the movable part 20 and the bottom part 120, which is the movable area of the movable part 20.
- the pressure sensor detects this operation.
- an input signal (actuator drive signal) is input to the vibration actuator from pressure sensing, and the movable part 20 starts moving in the pushing direction (Z direction).
- the pad main body 110 is displaced in the downward direction and reaches the lowest point, and due to the reaction force of the spring, the movable part 20 is moved to a position above the initial position, the operation reference position (a position similar to the displacement Sp-p). ) the pad body 110 moves.
- a gap is created due to the difference in vectors (V1, V2) between acceleration and displacement, and a strong tactile sensation can be imparted to the finger, and a tactile sensation corresponding to the operation can be imparted to the operation target.
- V1, V2 vectors
- the vibration presentation device 100 when the vibration presentation device 100 is operated by touching the pad body 110 of the trackpad with a pressing object such as the pad of an operator's finger, the vibration actuator 10 is driven in response. and vibrate. This vibration provides a tactile sensation to the operator.
- the vibration actuator 10 provides various types of tactile sensations to the trackpad in accordance with the displayed image operated by the operator, for example, when an electronic device equipped with a trackpad is provided with a display unit such as a liquid crystal display. You can do it like this.
- the vibration actuator 10 may, for example, generate vibrations so as to provide the tactile sensation of a mechanical switch corresponding to the image to be touched and operated.
- Examples of the mechanical switch include a tactile switch, an alternate type switch, a momentary switch, a toggle switch, a slide switch, a rotary switch, a DIP switch, and a rocker switch. Further, in the case of a push-type switch, it is possible to provide the tactile sensation of a switch having different degrees of depression.
- the vibration presentation device 1 of the present embodiment realizes a realistic tactile expression, such as the feel of a switch, based on load detection.
- the plate-shaped base part is the base, more specifically, the base plate, the fixed part on the base part side is the plate connection part, the fixed part on the movable part side is the core connection part, and the weight part is the weight or weight plate. It is called.
- the coil has high conductivity and is made of copper, for example.
- the core is made of a material with high magnetic permeability (ferromagnetic material, simply referred to as magnetic material), and is preferably made of SECC, silicon steel plate, SUS, or the like.
- the plate-shaped elastic part and the elastic body are preferably made of non-magnetic material, and SUS, phosphor bronze, resin, rubber, etc. may be used as the non-magnetic material constituting the plate-shaped elastic part and the elastic body.
- the base portion and the base plate are preferably made of a material with high magnetic permeability, such as SECC, silicon steel plate, SUS (ferromagnetic SUS), or the like.
- the weight portion, weight, and weight plate are made of a material with high specific gravity, such as phosphor bronze, SUS, and tungsten.
- Each of the following vibration actuators has the same basic configuration as the vibration actuator 10.
- Each vibration actuator basically consists of a magnetic plate, an electromagnet placed on the plate with a coil placed in the center of the core, and an electromagnet that supports the core on both sides of the coil and is connected to the plate. and an elastic body.
- the electromagnet may be in the form of a flat plate, and the elastic body is in the form of a flat plate, and is configured to support the electromagnet with the axis of the coil parallel to the plate and at a distance from the plate. You can also do this.
- the plate may have an opening in the region corresponding to the coil, which becomes part of the vibration space of the electromagnet.
- one of the coils or the plate is displaced toward the other and vibrates due to the magnetic force generated by energizing the electromagnet.
- the coil and core may be displaced toward the plate and vibrated, or the plate may be displaced toward the coil and core and vibrated.
- the vibration width of the electromagnet D in the space formed between the electromagnet and the plate is defined by the spring constant of the plate-shaped elastic part and the elastic body.
- the vibration width of the electromagnet in the space formed between the electromagnet D and the plate is defined by the thickness of the elastic body.
- the elastic body when the elastic body (plate-like elastic part) is a rectangular frame-shaped elastic body (frame body) as shown in the vibration actuator 10 of the embodiment, the elastic body has one opposite side facing the core. may be supported and connected to the plate on the other opposite side. Further, the elastic body may include a core connection portion and a plate connection portion, or the elastic body may include a pair of core connection portions and a pair of plate connection portions.
- the plate-shaped base portion 30 side is fixed to the back surface of the housing of the pad body 110, and the electromagnet constituted by the coil 22 and the core 24 is vibrated.
- the plate-shaped elastic body 1040 connects to the base plate 30 as the base part (a pair of connection parts ("fixed part side fixed part") and "plate connection part").
- a bent portion 1046 may be provided between the connecting portion (also referred to as a “movable portion side fixed portion” and also referred to as a “core connecting portion”) 1042 that connects to the core 24.
- the bent portion 1046 (the same applies to the bent portions in other modifications) defines the vibration width of the electromagnet D in the space formed between the electromagnet D and the base plate 30.
- the vibration actuator 1010 shown in FIGS. 17 and 18 is different from the vibration actuator 10 in the configuration of the plate-shaped elastic body 1040, and the other configurations are the same.
- the elastic body 1040 is a plate spring formed in the shape of a so-called rectangular frame, and may be made of metal or resin.
- the elastic body 1040 has core connection parts 1042a and 1042b that are fixed parts on the movable part side, plate connection parts 1044a and 1044b that are fixed parts on the base part side, and an elastic body part that includes a meandering bent part 1046. .
- the elastic main body portion connects the core connecting portions 1042a, 1042b and the base portion side fixing portions 1044a, 1044b and is elastically deformed.
- the bent portion 1046 is disposed as a part of a side parallel to the extending direction of the core 24 (the axial direction of the core 24) that constitutes the electromagnet D together with the coil 22 in a plan view, and is connected to the core connecting portions 1042a and 1042b. It is connected.
- the shape of the meandering portion 1146 as a bent portion may be, for example, a shape in which the number of bends (folded portions) is increased, as shown in the elastic body 1140 of the vibration actuator 1110 of the second modification shown in FIG. 19.
- the meandering portion 1146 as a bent portion is provided on each of a pair of opposite sides (opposite sides on which the plate connecting portions 1044a and 1044b are arranged) extending in the plus/minus Y direction parallel to the axial direction of the core. It's okay.
- the vibration actuators 1010 and 1110 displace the electromagnet (coil 22) toward the base plate (base portion) 30 to vibrate.
- the vibration actuator 1210 has a movable part 1220 that is an electromagnet D having an elastic body 1040, a base plate (base part) 30, a coil 22, and core opposite ends 24a and 24b.
- the elastic bodies 1040, 1140, 1240 having respective bent portions and the plate-like elastic portion 40 are rectangular frames that support a core on one opposite side and are connected to a base plate (base portion) on the other opposite side. It has a shape that With this configuration, there is no need to arrange other parts inside the frame to secure a deformation area for the elastic body, and the number of parts can be reduced and the overall thickness can be made thinner. In addition, bending of parts and the like are not required during the manufacture of the vibration actuator, and the vibration actuator itself can be arranged so as not to interfere with other parts. This is because, in other modified examples described below, if the elastic portion is a rectangular frame, the same effects as those described above can be obtained.
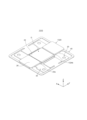
- FIGS. 21 and 22 are perspective views of another modification 4 of the vibration actuator according to an embodiment of the present invention.
- the vibration caused by the plate spring that is the plate-shaped elastic part (elastic body) 40 is damped, that is, the vibration of the plate spring.
- a damper 66 may be provided to dampen vibrations.
- the attachment target area is also referred to as a fixation target area
- the damper 66 is a vibration damping member and is also referred to as a damping member.
- the damper 66 is attached to the plate-shaped elastic part 40 so as to be interposed between the attachment target area and the plate-shaped elastic part 40 when the vibration actuator 1310 is fixed to the attachment target area.
- the damper 66 is disposed on the back surface of both ends 24 a and 24 b of the core 24 of the movable part 1320 so as to be adjacent to the back surface of the base plate 30 in the plane direction from a position adjacent to the spring connecting parts 241 and 242 .
- the damper 66 has a function of damping and suppressing vibrations of the electromagnet D (coil core).
- the damper 66 may be of any material as long as it damps vibrations, and may be made of thermoplastic elastomer, specifically thermosetting silicone rubber or thermoplastic butyl rubber.
- the upper surface of the damper 66 is fixed to the core, but the lower surface is located outside the base and is provided so as to be in contact with the attachment target area on the device side.
- FIGS. 3 and 24 are perspective views of another modification 5 of the vibration actuator according to an embodiment of the present invention.
- a contractible elastic body 1400 made of resin may be used as the elastic body disposed between the base plate 30 and the electromagnet D (the cores 24 on both sides of the coil 22).
- the elastic bodies 1400 are a pair of flat plates, and support the electromagnet D with respect to the base plate 30 so as to be movable in a direction perpendicular to the plate surface.
- the vibration actuator 1410 includes a base plate 30 that is a base portion, and a flat movable portion 20 that is an electromagnet D that is placed on the base plate 30 and has a coil 22 arranged in the center of a core 24.
- a magnetic force generated by energizing the coil 22 causes the movable part 20 to be displaced toward the base plate 30 and vibrated.
- a weight portion 26 is appropriately attached to the movable portion 20.
- the elastic body 1400 is made of an elastic material such as silicone, it is easy to change the size, material, etc., and the function as a spring can be easily adjusted.
- the elastic body 1400 may be formed by applying an elastic material.
- the elastic body 1400 can be formed by simply applying an elastic material between the two members.
- the elastic body 1400 is a pair of flat elastic members interposed between the base plate 30 and the core 24, there is no need for other parts, and the elastic body can be processed easily.
- the vibration actuator 1410 can be manufactured without any modification.
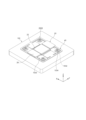
- FIG. 25 is a perspective view of another modification 6 of the vibration actuator according to an embodiment of the present invention.
- the base plate 1530 may be a plate with high magnetic permeability, and the base plate 1530 may be provided with fixing holes 1532.
- the base plate 1530 is fixed to an object to be attached (for example, the PCB or the pad 102) through a fixing hole 1532 using a fixing member 1534 such as a screw or an adhesive.
- the position of the fixing hole 1532 provided in the base plate 1530 can be changed.
- the base plate 1630 has a structure in which the fixing hole 1532 (see FIG. 25) is removed from the base plate 1530 (see FIG. 25). It may also be a configuration. According to this configuration, in the base plate 1630, the adhesive area with the attachment target is increased compared to the case where there are fixing holes, and the base plate 1630 can be firmly attached. Further, according to this configuration, since the portion where the fixing hole 1532 was provided does not function as a magnetic circuit, the area of the vibration actuator can be reduced by eliminating the fixing hole 1532 from the base plate 1630. . As a result, the actuator size can be reduced, and the vacant space in vibration actuators can be used to design the spring part by making the spring into a meandering shape and arranging the spring part to ensure the length of the spring (increase the deformation area). .
- any of the fixing holes 1532 may be made into an elongated hole 1536 in a configuration similar to the vibration actuator 1510 (see FIG. 25).
- the fixing member 1534 can be inserted into both the fixing hole 1532 and the elongated hole 1536 and temporarily fixed while positioning, and can be fixed at a desired position.
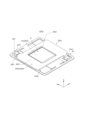
- FIG. 28 is a perspective view of another modified example 9 of the vibration actuator according to an embodiment of the present invention.
- the weight part 26 (see FIG. 1) attached to the movable part 20 may be replaced with a weight plate 1850 that is a flat weight part.
- An opening 1852 may be provided into which the is inserted.
- the weight plate 1850 has an opening (opening 1852) in the area of the coil 22, and the electromagnet D has the weight plate 1850, which has a shape that does not overlap the coil 22, fixed to the core 24 on both sides of the coil 22. It can be said that there are. With this configuration, a movable area of the movable portion 1820 can be ensured, and the height can be reduced.
- this weight plate 1850 may be used as a fixed part to be attached to the back surface of an object to be attached (for example, a PCB or pad 102, etc.).
- the vibration actuator 1810 and the pad 102 form a tactile sensation presentation device 2310, which generates vibrations in response to an operation such as a pressing operation performed on the pad 102, and can provide a tactile sensation.
- FIG. 30 is a perspective view of another modification 10 of the vibration actuator according to an embodiment of the present invention.
- the weight plate 1950 may be used as a flat weight portion instead of the weight portion 26 (see FIG. 1) attached to the movable portion 20.
- the weight plate 1950 is a frame-shaped member having an opening 1952 in the area of the coil 22.
- weight plates 1950 having a shape that does not overlap with the coil 22 are fixed to the core on both sides of the coil 22.
- the opening 1952 is provided in the center of the weight plate 1950, into which the coil 22 is inserted. Thereby, the thickness of the vibration actuator 1910 in the vibration direction can be reduced.
- weight plate 1950 is provided with a board opening (relief part) 1954 that opens in the area of the coil wiring connection part (land) 1902 of the flexible printed circuit board (FPC) 1900.
- the coil wiring connection part 1902 is a connection part between the flexible board, the wiring of 1900, and the coil 22.
- a plurality of substrate openings 1954 are formed continuously in the axial direction of the coil 22 in the opening 1952 of the weight plate 1950 .
- one of the board openings 1954 is arranged to open in the area of the coil wiring connection part 1902.
- the weight plate 1950 can be suitably attached to the core 24 while avoiding the coil wiring connection part 1902. This makes it possible to secure a movable area for the movable part 1920 and to reduce the height of the vibration actuator 1910. Furthermore, in the vibration actuator 1910, the front surface of the weight plate 1950 can be securely fixed in surface contact with the back surface of the operation surface.
- FIG. 31 is a perspective view of another modified example 11 of the vibration actuator according to an embodiment of the present invention
- FIG. 32 is an exploded perspective view of the vibration actuator of the other modified example 11 shown in FIG. 31. .
- a damper (vibration damping member) 2000 that damps the elastic deformation of the plate-shaped elastic member (elastic body) 40, that is, damps the vibration, is connected to the weight plate 2050 of the movable part 2020 and the plate. It may also be provided between the elastic portion 40 and the elastic portion 40 .
- the damper 2000 includes base-side fixing parts 44a and 44b that are core connection parts of the plate-like elastic part 40, and projecting surface parts 2054a and 2054b that project from the center of the weight plate 2050 in a direction orthogonal to the axis of the core 24. is interposed between.
- the weight plate 2050 has a shape that does not overlap with the coil 22, and is fixed to the core 24 on both sides of the coil 22 (specifically, both ends 24a and 24b of the core 24) in the electromagnet D having the core 24 and the coil 22. and constitutes the movable part 2020.
- the weight plate 2050 has an opening 2052 that opens in the area of the coil 22 .
- the movable part 2020 is connected to the movable part side fixing parts 42a and 42b on the opposite sides of the plate-like elastic part 40 at the spring connecting parts 241 and 242 at both ends of the core 24.
- a weight plate 2050 is connected to the other pair of base-side fixing parts 44a and 44b on opposite sides of the plate-like elastic part 40 via a damper 2000. This makes it possible to reduce the thickness of the vibration actuator 2010 by the thickness of the damper 2000, thereby damping the vibrations of the plate-like elastic portion 40.
- the base-side fixing parts 44a and 44b are arranged and fixed on the base plate.
- the damper 2000 may be provided between the weight and the base plate, or between the weight and the object to which the base plate is fixed. In either case, the vibrations of the plate-like elastic portion 40 can be damped and controlled, and the vibrations can be made to vibrate suitably.
- FIG. 33 is a perspective view of another modified example 12 of the vibration actuator according to an embodiment of the present invention
- FIG. 34 is an exploded perspective view of the vibration actuator shown in FIG. 33
- FIG. FIG. 7 is a perspective view of another modification example 13 of the vibration actuator according to the embodiment.
- a damper 2100 may be interposed between the weight plate 2150 and the base plate 30.
- the damper 2100 may be attached to either the weight plate 2150 or the base plate 30.
- the damper 2100 is configured to abut against the weight plate 2150 with a plate-shaped spring piece 2154 that is independently deformable against the main body portion of the weight plate 2150.
- the spring piece portion 2154 is formed by cutting a predetermined position of the weight plate 2150, here, a corner of the rectangular weight plate 2150 including a square shape.
- the spring piece portion 2154 is formed in a part of the main body portion of the weight plate 2150 so as to be elastically deformable.
- the damper 2200 may be interposed between a weight plate 2050 having an opening 2052 and a mounting surface 102a of an attachment target (for example, a pad 102) to which the vibration actuator 2210 is attached. .
- the damper 2200 is arranged on the back surface (the surface on the base plate 30 side) of both ends 2056a and 2056b of the weight plate 2050 placed on an electromagnet D (coil core) in which the coil 22 is placed in the center of the core. ) is attached.
- electromagnet D coil core
- Both end portions 2056a and 2056b are arranged so as to protrude toward the core axial end side than both end portions of the core within the coil 22, and the electromagnet D is perpendicular to the base plate 30 side with respect to the base plate 30 via the plate-shaped elastic portion 40. If you move in the direction, it will follow and move. As a result, the damper 2200 on the back side of both end portions 2056a, 2056b moves toward and comes into contact with the attachment surface 102a of the attachment target (for example, the pad 102), producing the same effect as the dampers 2000, 2100 described above.
- FIG. 36 is a perspective view of another modification 14 of the vibration actuator according to an embodiment of the present invention.
- the coil 2422 arranged to wind the core 24 in the movable part 2420 may be an air-core coil, and may be a plate-shaped coil with a slit on both sides for passing the core 24. It is provided on the outer periphery of the bobbin 2400. By inserting this bobbin 2400 with a coil into the core 24 and attaching it to the core 24, the coil can be easily arranged around the center of the core 24.
- the bobbin is provided with flanges forming flanges at both ends spaced apart in the axial direction, and the flanged bobbin is attached to the core 24, and a coil is directly wound between the flanges of the bobbin to form a collar at the center of the core.
- a coil may be provided in the.
- FIG. 37 is a perspective view of another modification 15 of the vibration actuator according to an embodiment of the present invention.
- the strain detection section 2600 may be provided in the plate-shaped elastic section (elastic support section) 40. That is, the plate-like elastic section 40 includes a strain detection section 2600.
- the strain detection section 2600 is disposed at a portion of the plate-shaped elastic section 40 that is distorted due to deformation. The distorted portion is the connection portion between the base-side fixing portion 44b and the elastic body portion 46 including the elastically deformable arm.
- the strain detection unit 2600 detects the strain generated by the load applied to the connecting portion that functions as a strain body when the vibration actuator 2610 is driven, that is, vibrates. Thereby, for example, the vibration actuator 2610 can be driven according to the detection result to impart vibration to the attached device. For example, when operating an operating device such as a pad or a touch panel, a tactile sensation can be provided to the operator (also referred to as an operator) via the operating device, that is, tactile feedback can be realized.
- each of the vibration actuators is a contact type that is used to fix a base plate to an attachment target such as a pad or a PCB, and apply vibration to an operation surface connected to an upper movable part. It may also be used as a type input device.
- This contact type input device presents a tactile sensation to the operator by energizing the coil 22 and vibrating the electromagnet D in response to the operator's touch motion on the operation surface.
- the operation surface may be a display, an operation panel, or a touch pad.
- Each of the vibration actuators (for example, the vibration actuator 2610) is fixed to the attachment target 103 with the base plate 30 facing upward, and is suspended with the movable part 20 side facing downward, as shown in FIG. may be used in
- the strain detection unit 2600 can confirm the displacement of the movable part, output this confirmation as an additional signal to the control unit, etc., and use the accelerator or brake that occurs to change the vibration. Timing can be controlled by feedback.
- the configuration may be such that the weight plate is placed on top and the base plate is placed on the bottom, and the weight plate is fixed to the attachment target.
- Other variations of the vibration actuator each place either the base plate or the electromagnet on the back side of the operating surface.
- FIG. 39 is a perspective view of another modification 16 of the vibration actuator according to an embodiment of the present invention.
- the vibration actuators of this embodiment and each of the modified examples described above are used in a suspended state (see FIG. 38), in other words, one of the device body to be attached and the vibration imparting target is suspended from the other.
- the state will be as follows. At this time, there is no restriction on the direction of separation from each other due to their own weight or the like.
- a regulating mechanism 290 may be provided.
- the regulating mechanism 290 has, for example, a moving engagement part 2957 provided on the movable part side and a movement regulating part 2937 provided on the base plate side, and when the movable part and the base plate move in a direction in which they are relatively separated, Then, the movement engaging portion 2957 and the movement restriction portion 2937 engage with each other to restrict movement in the separating direction.
- the regulating mechanisms 290 may be provided at four corners of the vibration actuator when viewed from above, or may be provided at diagonal positions of the vibration actuator 2920 that is rectangular when viewed from above, for example.
- the vibration actuator 2910 is configured similarly to the vibration actuator 1810, and the movable part 2920 is configured by attaching a weight plate 2950 to an electromagnet D.
- the movable engagement portion 2957 is provided at the tip of a portion of the weight plate 2950 that protrudes laterally from a part of the outer periphery of a rectangular plate-shaped main body 2951 having an opening 2952 in the center and is bent toward the base plate 2930 side.
- the movement restricting part 2937 is provided on the opposite side of the base plate 2930 with respect to the movable engaging part 2957 and at a position facing away from the movable engaging part 2957.
- the movement restricting portion 2937 is made of metal because it is integrated with the base plate 2930. Since the movable engagement portion 2957 is the weight plate 2950, it is made of a non-magnetic material, and may be formed of resin or the like.
- the regulating mechanism 290 regulates the distance between the base plate 2930 and the movable part 2920, so that the base plate 2930 and the movable part 2920 are not separated more than necessary and do not come off each other. Therefore, for example, when attaching the vibration actuator 2910 to the attachment target 103 such as a PCB or pad in place of the vibration actuator 2610 shown in FIG. can do. Further, even when the base plate 2930 and the movable part 2920 are attached by the movable part 2920, the base plate 2930 and the movable part 2920 are not separated from each other more than necessary, and the base plate 2930 and the movable part 2920 function properly.
- the plate-shaped base portion 30 side is fixed to the back surface of the casing of the pad body 110, and the electromagnet D constituted by the coil 22 and the core 24 is vibrated.
- the vibration actuator 3210 shown in FIG. 30 may be vibrated.
- a fastening member (screw, rivet, etc.) 3212 is attached to the bud main body 110 by passing through the plate connection portion of the plate-like elastic portion 40, which is a frame-like elastic body, and the weight portion 26.
- FIG. 41 is a perspective view of another modification 18 of the vibration actuator according to an embodiment of the present invention
- FIG. 42 is an exploded perspective view of the other modification 18.
- a frame-shaped arm 48 connected to the base plate 3330 may be arranged inside the outer periphery of the base plate 3330 instead of outside.
- the base-side fixing parts 44a and 44b that connect the frame-shaped leaf spring 3340 and the base plate 3330 are provided on the outside of the frame-shaped portion, not on the inside.
- a flat spacer 600 may be interposed between the base plate 3330 and the leaf spring 3340 to ensure a vibration space for the leaf spring 3340.
- Spacer 600 defines the vibration width of electromagnet D in the space formed between electromagnet D and base plate 3330.
- FIG. 43 is a perspective view of another modified example 19 of the vibration actuator according to an embodiment of the present invention
- FIG. 44 is an exploded perspective view of the other modified example 19.
- the core of the electromagnet the part to which the weight 3450 is attached other than the central part where the coil 22 is arranged
- the spring 3446 of the elastic deformation part 3440 are integrated with the same member. It's okay.
- the spring 3446 has a meandering shape, and in order to ensure a vibration space for the spring 3446, a flat spacer 60 may be interposed between the base plate 3430 and the spring 3446.
- either the base plate 3430 or the spring 3446 may be deformed to increase the height. According to these configurations, the number of parts can be reduced. By providing the spacer 60, the thickness of the vibration actuator 3410 can also be adjusted.
- FIG. 45 is a perspective view of another modification 20 of the vibration actuator according to an embodiment of the present invention
- FIG. 46 is an exploded perspective view of the other modification 20.
- a movable part 3520 including an electromagnet D both ends of the core 24 that are spaced apart in the core axial direction are supported by a pair of springs (elastic bodies) 3540, and these springs 3540 are supported by a pair of spacers 62. It may be attached to the base plate 3530 via.
- the illustrated spacer 62 is interposed between the base plate 3530 and the plate-side fixing portion 3542 that is continuous with the elastically deformed bent portion 3546 of the spring 3540 to connect the two. Note that the bent portions 3546 are fixed to both ends of the core 24 together with the weight plate 50 by the fastening members 172. According to this configuration, since the facing surfaces of the core 24 and the base plate and the fixing portion of the spring 3540 and the base plate are in the same direction, the width of the product can be reduced.
- the weight plate 50 is formed in a shape that does not overlap with the coil 22, and has an opening 52 where the coil 22 is arranged and a board opening (relief part) that opens in the area of the coil wiring connection part 1902 connected to the coil 22. 54. As a result, the thickness of the vibration actuator 3510 in the vibration direction becomes thinner.
- FIG. 47 is a perspective view of another modification 21 of the vibration actuator according to an embodiment of the present invention
- FIG. 48 is an exploded perspective view of the other modification 21.
- the base plate 30 and the electromagnet D are used. 242
- a plate-shaped elastic body (rubber plate) 80 may be placed between the two.
- the core 24 is configured to be vibrated by this plate-shaped elastic body (rubber plate) 80.
- the vibration actuator 3610 has a weight plate 50 (see FIGS. 45 and 46) instead of the weight part 26 (see FIG. 8), and the weight plate 50 is fixed to the core 24 at both ends of the coil 22.
- the weight plate 50 is a frame-shaped member having an opening (opening 52) in the area of the coil 22, and has an opening 54 in the area of the coil wiring connection portion 1902.
- spring connecting portions 241 and 242 at both ends of the core and both ends of the weight plate 50 are fixed to the base plate 30 by a fixing member 172 (see FIG. 47). With this configuration, the same effects as the vibration actuator 1410 can be obtained, and the actuator can be made lower in height, making it easier to manufacture.
- vibration actuators 3710 and 3810 shown in FIGS. 49 to 52 are perspective views and exploded perspective views of other modified examples 22 and 23 of the vibration actuator according to an embodiment of the present invention.
- adjustment is not made by adjusting the thickness (length in the Z direction) of the frame springs 3746 and 3846 that elastically deform, but by adjusting the base plate. 3730 or a configuration in which the elastic body (plate-shaped elastic portion) 3840 having the frame spring 3846 itself is subjected to bending processing is also considered.
- the vibration width of the electromagnet D in the space formed between the electromagnet D and the base plates 3730 and 3830 can be increased by bending the base plate 3730 or the elastic body 3840 (the plate-side fixing part 3844 connected to the frame spring 3846). Defined by exposure.
- the bending portion 3734 of the base plate 3730 increases the height of the connection position with the elastic body 3740. Further, in the vibration actuator 3810, the height of the frame spring 3846 is increased by the bent portion 3845 which is a step. According to these configurations, the width and height of the vibration space can be determined separately after selecting the optimum material and spring constant of the elastic body, thereby increasing the degree of freedom in design. Further, since a separate part for height adjustment is not required, the number of parts can be reduced.
- FIG. 53 is a perspective view of another modification 24 of the vibration actuator according to an embodiment of the present invention
- FIG. 54 is an exploded perspective view of the other modification 24.
- the base plate 3930 is a high magnetic permeability base plate that has no opening in the structure of the base portion 30 (see FIG. 8).
- an electromagnet D having a coil 22 in the center of a plate-shaped core 24 is arranged.
- an elastic body 3940 that is a frame surrounding the base plate 3930 is connected to the base plate 3930 while supporting the plate-shaped core 24.
- the electromagnet D of the movable part 20 vibrates in a direction perpendicular to the plate surface of the core 24 due to the magnetic force generated by energizing the coil 22 .
- adjusting the distance between the coil 22 and the base plate 30 requires either installing a spacer 62 shown in FIG. 53 or bending the base plate 30 or the elastic body 3940 itself (see FIGS. 49 to 52). .
- the spacer 62 is interposed between the base plate 3930 and the plate-side connection portion of the elastic body 3940.
- the electromagnet D may be formed by winding the coil 22 around a bobbin 28 formed in the core 24.
- a frame-shaped elastic body (see FIGS. 8 and 9) 4140 may be divided into parts (divided bodies 441 and 442).
- the divided bodies 441, 442 are connected to the electromagnet D and the weight 50 at one end 441a, 442a and the other end 441b, 442b, respectively.
- the base plate 4230 is made of a non-magnetic material, and a rectangular frame-shaped yoke 64 is separately provided on the base plate 4230 so as to surround the opening, so that the magnetic path of the electromagnet D may be formed.
- a pair of opposing sides 642 and 644 forming a frame shape may be arranged to face the magnetic pole portion of the electromagnet D at the top and bottom.
- FIG. 61 is a perspective view of another modification 28 of the vibration actuator according to an embodiment of the present invention
- FIG. 62 is an exploded perspective view of the other modification 28.
- both ends 4324a and 4324b of a plate-shaped core 4324 around which the coil 22 is wound are used as the electromagnet D0. It may also have a shape that protrudes in a direction perpendicular to the winding direction.
- the core 4324 is a magnetic body with a coil 22 sheathed in the center, and spring connection parts 241 and 242 that protrude in the core axial direction are provided at both ends 4324a and 4324b, respectively.
- the area facing the base plate 30, that is, the area serving as the magnetic path is also increased, and a magnetic circuit with higher magnetic efficiency can be realized.
- a plurality of core coils (core 4424/coil 4422, core 4524/coil 4522) supported by a frame-shaped elastic body 40, that is, a plurality of electromagnets D1 , D2 may be arranged in parallel. According to this configuration, it is possible to reduce the height of the vibration actuators 4410, 4510 while keeping the generated magnetic force constant.
- 67 to 70 are perspective views and exploded perspective views, respectively, of other modified examples 31 and 32 of the vibration actuator according to an embodiment of the present invention.
- a configuration may be formed in which a plurality of electromagnets D3 and D4 (core 4624/coil 4622, core 4724/coil 4722) are arranged in parallel. .
- Each of the vibration actuators 4610, 4710 uses a flat elastic body (made of the same material as the elastic body 1400) 4640, 4740 instead of a frame-shaped elastic member between the plurality of electromagnets D3, D4 and base plates 4630, 4730. We are intervening.
- the base plates 4630 and 4730, together with the weights 4650 and 4750, have shapes that do not overlap the coils 4622 and 4722, respectively.
- FIG. 71 is a perspective view of another modification 33 of the vibration actuator according to an embodiment of the present invention
- FIG. 72 is an exploded perspective view of the other modification 33.
- the vibration actuator 4810 of the other modified example 33 shown in the figure it may be configured to have a movable part 4820 formed by combining an electromagnet D5 formed by winding a coil 4822 around a rectangular thin plate-shaped core 4824 in a rectangular frame shape.
- a plurality of elastic bodies 4840 are provided at four corners of the frame-like part assembled in a frame shape between the movable part 4820 and the base plate 4830, and each of the elastic bodies 4840 allows the movable part 4820 to move freely. Supported.
- the base plate 4830 has a notch 4832 that serves as an escape portion for the coil 22, and the coil 22 is disposed within the notch 4832.
- the movable part 4820 has an H-shaped weight 4850 that avoids each coil 4822 on a part of the frame-shaped electromagnet D5.
- the weight 4850 is arranged between a pair of electromagnets that are parallel and spaced apart in the X direction, and is fixed by the cores 4824 of each of the pair of electromagnets D5-1 that are spaced apart and parallel to each other in the Y direction. According to this configuration, it is possible to reduce the height and size of the vibration actuator 4810 itself, and it is also possible to set a wide range of tactile sensation (range of intensity) obtained by the vibration of the actuator.
- FIG. 73 is a perspective view of another modification 34 of the vibration actuator according to an embodiment of the present invention
- FIG. 74 is an exploded perspective view of the other modification 34.
- the base plate 4930, elastic body 4940, and weight 4950 are circular
- the core 4924 has a shape having branched core portions 4924a, 4924b, and 4924c extending radially in three directions from the center.
- the coils 4922 are arranged (sheathed) at the center of each of the branch core parts 4924a, 4924b, and 4924c.
- Coil 4922 constitutes electromagnet D6 together with branch core portions 4924a, 4924b, and 4924c.
- Spring connecting portions 241a, 241b, and 241c are provided at each tip of the branch core portions 4924a, 4924b, and 4924c.
- Electromagnet D6 is connected to elastic body 4940 via spring connections 241a, 241b, and 241c.
- the elastic body 4940 is not a rectangular frame like the previous embodiment, but a circular frame surrounding the circular base plate 4930.
- the elastic body 4940 has meandering portions (bent portions) arranged along the circumferential direction, and the spring connecting portions 241a, 241b, 241c and the base plate 4930 are alternately connected in the circumferential direction at the meandering portion.
- the shape of the vibration actuator 4910 can be made circular, and a large vibration can be obtained compared to the area of the component.
- two, four or more branch core parts 4924a to 4924c may be arranged radially, and a coil may be arranged in each branch core part to form an electromagnet.
- FIG. 75 is a perspective view of another modification 35 of the vibration actuator according to an embodiment of the present invention, and is an exploded perspective view of the other modification 35.
- an elastic body is interposed as a plurality of pairs of coil springs 5040 between the base plate 30 and the core ends 24a, 24b of the electromagnet D, and the core ends 241, 242 of the electromagnet D are was configured to support.
- a weight 50 having a shape that does not overlap the coil is fixed to the core (core ends 24a, 24b) on both sides of the coil. According to this configuration, by using the coil spring 5040, an actuator 5010 that is low cost and has high durability can be obtained.
- the elastic bodies are a pair (plural pairs) of flat elastic members interposed between the base plate 30 and the core ends 24a, 24b, there is no need for other parts, and , the vibration actuator 1410 can be manufactured without processing the elastic body.
- FIG. 77 is a perspective view of another modification 36 of the vibration actuator according to an embodiment of the present invention
- FIG. 78 is an exploded perspective view of the other modification 36.
- a weight 5150 for increasing the tactile sensation provided by the vibration actuator 5110 may be placed on the back side of the core 5124 (on the base plate 5130 side).
- the core ends 5124a and 5124b are bent to form a step, and the height position of the core ends 5124a and 5124b is adjusted to the core 5124.
- the height is set higher than the bottom surface 5124c of the main body.
- the surface of the core 5124 (the surface of the core ends 5124a and 5124b) and the surface of the coil 5122 are connected to the vibration actuator. It becomes the surface.
- the height of the vibration actuator 5110 can be made lower than in a structure in which the surface portion of the coil, the core end portions 5124a and 5124b, and the weight 5150 are laminated in this order.
- FIG. 79 is a perspective view of another modification 37 of the vibration actuator according to an embodiment of the present invention
- FIG. 80 is an exploded perspective view of another modification 37.
- the movable part 5220 has a rectangular weight block 5250 mounted on the core 5224.
- This weight block 5250 is arranged separately on the core ends 5224a and 5224b at a position avoiding the central coil 5222 portion of the core 5224. With this configuration, sufficient vibration can be obtained while keeping the height of the vibration actuator 5210 low.
- a capacitance detection unit may be provided between the weight, weight, or weight plate, and the base plate.
- the capacitance detection section can be attached to one of the weight section, the weight, or the weight plate, and the base plate by replacing one of the dampers 2000, so that the static Changes in capacitance may also be detected.
- the electrostatic amount detection section may be provided in any manner as long as it detects the relative distance between the weight, the weight, or a portion of the weight plate and a portion of the base plate.
- each vibration actuator of the modification can be attached to a track pad by using it instead of the vibration actuator 10 shown in FIG. 13.
- Each of the vibration actuators of the modified examples can basically be incorporated into a product by being fixed to the product casing via a base plate, weight plate, or weight.
- the magnetic plate itself can be used as the operation surface, or an electromagnet can be directly attached to the back side of the operation surface.
- the coil is energized in response to the operator's touch operation on the operation surface, and one of the coil (electromagnet) or the base plate (plate) is displaced to approach the other and vibrates. This makes it possible to directly present the tactile sensation to the operator and provide the tactile sensation more effectively.
- each of the vibration actuators described above may have a configuration in which the operation surface is a weight.
- the operating surface since the structure is such that a weight is attached to the operating surface, the operating surface itself is structured to have a step that avoids the coil, and the core is attached.
- the elastic body may be replaced by an elastic member such as a flat rubber or a damper.
- an electromagnet and an opposing magnetic material are placed at opposing positions on the operation surface and the housing, and an elastic member is provided between the operation surface and the housing to secure the operation surface.
- the entire housing may be configured as an actuator.
- the back side of the operation surface may have the shape and function of a plate.
- the plate connection part (base side fixing part) of the elastic body is connected to the back surface, but the plate connection part is connected at a higher position than the back surface to ensure a deformation area in the thickness direction of the elastic body itself. You can do it like this.
- it may be connected to the elastic body (plate connection part) at a stepped part (for example, the bent part 3734 in FIG. 50) formed by processing the back surface.
- the elastic body itself (plate connection part) may be processed to have a bent part (for example, the bent part 3845 in FIG. 51) that changes the height. According to this configuration, since no plate (base plate) is provided, the number of parts can be reduced.
- a spacer may be provided to ensure an elastic deformation region (region in the thickness direction) of the elastic body.
- the area of the elastic body can be changed as appropriate depending on the height of the spacer.
- the operation surface may be, for example, a display, an operation panel, or a touch pad.
- the vibration actuator and contact type input device are easy to assemble, can be placed in a small space, and can vibrate appropriately, and are useful for use in, for example, PCBs, track pads, operation panels, etc. It is something.
- Vibration presentation device (contact type input device) 10,1010,1110,1210,1310,1410,1510,1610,1710,1810,1910,2010,2110,2210,2310,2610,2910,3210,3410,3510,3610,3710,3810,3910,401 0, 4110, 4210, 4310, 4410, 4510, 4610, 4710, 4810, 4910, 5010, 5110, 5210 Vibration actuator 12 Switching element 14 Signal generation unit 20, 1320, 1820, 1920, 2020, 2920 Movable part 22 Coil 24 Core ( magnetic core) 24a One end portion 24b Other end portion 26 Weight portion 30 Base portion (base, base plate) 32a, 32b Opposing part 34a, 34b Spring fixing part 36 Fixing part 38, 1852 Opening part 40, 1040, 1246 Plate elastic part (elastic body) 42a, 42b, 1042a, 1042b Movable part side fixed part (core connection part) 44a, 44b, 1044a
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Power Engineering (AREA)
- Human Computer Interaction (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Mechanical Engineering (AREA)
- Apparatuses For Generation Of Mechanical Vibrations (AREA)
- Reciprocating, Oscillating Or Vibrating Motors (AREA)
Priority Applications (13)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020247035273A KR102782470B1 (ko) | 2022-04-28 | 2023-04-28 | 진동 액추에이터 및 접촉형 입력 장치 |
| CN202510878253.7A CN120714878A (zh) | 2022-04-28 | 2023-04-28 | 振动致动器以及接触型输入装置 |
| EP23796555.3A EP4506070A4 (en) | 2022-04-28 | 2023-04-28 | VIBRATION ACTUATOR AND CONTACT TYPE INPUT DEVICE |
| CN202510879374.3A CN120714881A (zh) | 2022-04-28 | 2023-04-28 | 振动致动器以及接触型输入装置 |
| KR1020257008138A KR20250043569A (ko) | 2022-04-28 | 2023-04-28 | 진동 액추에이터 및 접촉형 입력 장치 |
| US18/860,800 US12463517B2 (en) | 2022-04-28 | 2023-04-28 | Vibration actuator with elastic body with rectangualr frame body surrounding the plate and contact-type input device |
| CN202510878822.8A CN120714879A (zh) | 2022-04-28 | 2023-04-28 | 振动致动器以及接触型输入装置 |
| CN202510879854.XA CN120714882A (zh) | 2022-04-28 | 2023-04-28 | 振动致动器以及接触型输入装置 |
| CN202510879169.7A CN120714880A (zh) | 2022-04-28 | 2023-04-28 | 振动致动器以及接触型输入装置 |
| CN202380034880.1A CN119072364B (zh) | 2022-04-28 | 2023-04-28 | 振动致动器以及接触型输入装置 |
| CN202510878214.7A CN120714877A (zh) | 2022-04-28 | 2023-04-28 | 振动致动器以及接触型输入装置 |
| JP2023572976A JP7487446B2 (ja) | 2022-04-28 | 2023-04-28 | 振動アクチュエータ及び接触型入力装置 |
| US19/333,813 US20260018980A1 (en) | 2022-04-28 | 2025-09-19 | Vibration actuator and contact-type input device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022074823 | 2022-04-28 | ||
| JP2022-074823 | 2022-04-28 |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/860,800 A-371-Of-International US12463517B2 (en) | 2022-04-28 | 2023-04-28 | Vibration actuator with elastic body with rectangualr frame body surrounding the plate and contact-type input device |
| US19/333,813 Continuation US20260018980A1 (en) | 2022-04-28 | 2025-09-19 | Vibration actuator and contact-type input device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023210823A1 true WO2023210823A1 (ja) | 2023-11-02 |
Family
ID=88518936
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/016957 Ceased WO2023210823A1 (ja) | 2022-04-28 | 2023-04-28 | 振動アクチュエータ及び接触型入力装置 |
| PCT/JP2023/016959 Ceased WO2023210824A1 (ja) | 2022-04-28 | 2023-04-28 | 振動アクチュエータ及び接触型入力装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/016959 Ceased WO2023210824A1 (ja) | 2022-04-28 | 2023-04-28 | 振動アクチュエータ及び接触型入力装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US12463517B2 (https=) |
| EP (1) | EP4506070A4 (https=) |
| JP (3) | JP7517782B2 (https=) |
| KR (2) | KR20250043569A (https=) |
| CN (7) | CN120714879A (https=) |
| WO (2) | WO2023210823A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025263614A1 (ja) * | 2024-06-21 | 2025-12-26 | ミネベアミツミ株式会社 | 振動アクチュエーター及び振動呈示装置 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2026006565A (ja) * | 2024-06-28 | 2026-01-16 | ミネベアミツミ株式会社 | 振動アクチュエータ及び振動提示装置 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012181050A (ja) * | 2011-02-28 | 2012-09-20 | Japan Science & Technology Agency | センサ用構造体、容量式センサ、圧電式センサ、容量式アクチュエータ、及び、圧電式アクチュエータ |
| JP2013187928A (ja) * | 2012-03-06 | 2013-09-19 | Toyota Central R&D Labs Inc | 振動発電装置 |
| JP2015070729A (ja) | 2013-09-30 | 2015-04-13 | 日本電産コパル株式会社 | 情報端末処理装置及び振動発生装置 |
| WO2016185900A1 (ja) * | 2015-05-15 | 2016-11-24 | 株式会社村田製作所 | 駆動装置 |
| US20170341108A1 (en) * | 2016-05-27 | 2017-11-30 | AAC Technologies Pte. Ltd. | Linear vibration motor |
| US20190319568A1 (en) * | 2018-04-11 | 2019-10-17 | Mplus Co., Ltd. | Linear vibration motor |
| JP2021081876A (ja) * | 2019-11-15 | 2021-05-27 | ミネベアミツミ株式会社 | 振動アクチュエータ及び振動呈示装置 |
| JP2021164923A (ja) * | 2020-02-18 | 2021-10-14 | ミネベアミツミ株式会社 | 振動発生装置及び電子機器 |
| JP2021169096A (ja) * | 2018-08-28 | 2021-10-28 | ミネベアミツミ株式会社 | 振動アクチュエータ及び電子機器 |
| JP2022056149A (ja) * | 2020-09-29 | 2022-04-08 | ミネベアミツミ株式会社 | 振動アクチュエーター及び振動呈示装置 |
| JP2022074823A (ja) | 2020-11-05 | 2022-05-18 | Tdk株式会社 | 振動デバイス |
Family Cites Families (101)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5231337A (en) * | 1992-01-03 | 1993-07-27 | Harman International Industries, Inc. | Vibratory acoustic compressor |
| IL128085A0 (en) * | 1999-01-17 | 1999-11-30 | Nachum Zabar | Electromagnetic vibrator pump and leaf spring particularly useful therein |
| JP2004261684A (ja) * | 2003-02-28 | 2004-09-24 | Citizen Electronics Co Ltd | 振動体及びその製造方法 |
| KR100568315B1 (ko) * | 2004-09-24 | 2006-04-05 | 삼성전기주식회사 | 통신단말기용 멀티 모드 진동발생장치 |
| EP1674165A1 (fr) * | 2004-12-22 | 2006-06-28 | ETA SA Manufacture Horlogère Suisse | Dispositif vibrant muni de moyens de protection contre des chocs mécaniques pour un objet portable |
| JP2008225690A (ja) * | 2007-03-09 | 2008-09-25 | Sony Corp | 振動体、触覚機能付きの入力装置及び電子機器 |
| JP2009195895A (ja) * | 2007-10-11 | 2009-09-03 | Citizen Electronics Co Ltd | 振動発生装置及びその製造方法 |
| JP5058849B2 (ja) * | 2008-03-05 | 2012-10-24 | 株式会社ミツバ | ブラシレスモータ |
| US20090267423A1 (en) * | 2008-04-23 | 2009-10-29 | Hiroo Kajiwara | Electromagnetic exciter |
| US8008826B2 (en) * | 2008-08-12 | 2011-08-30 | The Boeing Company | Brushless motor/generator with trapped-flux superconductors |
| US20110133577A1 (en) * | 2008-08-18 | 2011-06-09 | In Ho Lee | Horizontal linear vibration device |
| JP5121635B2 (ja) * | 2008-08-28 | 2013-01-16 | オリンパス株式会社 | 顕微鏡のレボルバ装置 |
| CA2741416A1 (en) * | 2008-10-22 | 2010-04-29 | Sinfonia Technology Co., Ltd. | Linear actuator |
| CN201388144Y (zh) * | 2009-02-20 | 2010-01-20 | 瑞声声学科技(常州)有限公司 | 扁平线性振动电机 |
| US8461969B2 (en) * | 2009-06-02 | 2013-06-11 | Lg Innotek Co., Ltd. | Dual mode vibrator |
| KR101090428B1 (ko) * | 2009-07-07 | 2011-12-07 | 삼성전기주식회사 | 선형 진동자 |
| KR101077374B1 (ko) * | 2009-07-22 | 2011-10-26 | 삼성전기주식회사 | 수평 리니어 진동자 |
| KR101084860B1 (ko) * | 2009-07-22 | 2011-11-21 | 삼성전기주식회사 | 수평 리니어 진동자 |
| KR101079448B1 (ko) * | 2009-09-24 | 2011-11-03 | 삼성전기주식회사 | 수평 진동자 |
| CN201708677U (zh) * | 2009-10-19 | 2011-01-12 | 常州美欧电子有限公司 | 扁平线性振动电机 |
| KR101090426B1 (ko) * | 2009-11-02 | 2011-12-07 | 삼성전기주식회사 | 선형 진동자 |
| CN201577016U (zh) * | 2009-11-16 | 2010-09-08 | 瑞声声学科技(深圳)有限公司 | 振动电机 |
| CN201639461U (zh) * | 2009-12-31 | 2010-11-17 | 瑞声声学科技(深圳)有限公司 | 直线振动马达 |
| KR101064469B1 (ko) * | 2010-04-05 | 2011-09-15 | 엘지이노텍 주식회사 | 진동 모터 |
| WO2011129475A1 (ko) * | 2010-04-16 | 2011-10-20 | 엘지이노텍 주식회사 | 광대역폭을 가진 선형 진동기 및 모바일 장치 |
| JP2011230067A (ja) * | 2010-04-28 | 2011-11-17 | Alps Electric Co Ltd | 振動発生装置 |
| KR101101506B1 (ko) * | 2010-06-29 | 2012-01-03 | 삼성전기주식회사 | 수평 진동자 |
| KR101796094B1 (ko) * | 2010-09-01 | 2017-11-09 | 주식회사 이엠텍 | 수평 진동 모터 |
| US8878401B2 (en) * | 2010-11-10 | 2014-11-04 | Lg Innotek Co., Ltd. | Linear vibrator having a trembler with a magnet and a weight |
| JP5461381B2 (ja) * | 2010-12-17 | 2014-04-02 | アルプス電気株式会社 | 振動発生装置 |
| KR101255914B1 (ko) * | 2010-12-31 | 2013-04-23 | 삼성전기주식회사 | 선형 진동모터 |
| KR101188055B1 (ko) * | 2011-01-25 | 2012-10-05 | 삼성전기주식회사 | 진동발생장치 |
| CN102223048B (zh) * | 2011-06-08 | 2014-01-01 | 瑞声声学科技(深圳)有限公司 | 振动电机 |
| JP5840427B2 (ja) * | 2011-09-09 | 2016-01-06 | アルプス電気株式会社 | 振動発生装置 |
| KR101320133B1 (ko) * | 2011-10-18 | 2013-10-22 | 삼성전기주식회사 | 선형 진동자 및 그 제조 방법 |
| KR101821669B1 (ko) * | 2011-10-19 | 2018-01-24 | 주식회사 이엠텍 | 선형 진동자 |
| US20130099600A1 (en) * | 2011-10-24 | 2013-04-25 | Lg Innotek Co., Ltd. | Linear vibrator |
| US9467033B2 (en) * | 2012-02-07 | 2016-10-11 | Lg Electronics Inc. | Vibration motor and mobile terminal having the same |
| JP5861214B2 (ja) * | 2012-02-23 | 2016-02-16 | 日本電産セイミツ株式会社 | 振動発生装置 |
| JP5943419B2 (ja) * | 2012-03-16 | 2016-07-05 | 日本電産セイミツ株式会社 | 振動発生装置 |
| JP6029854B2 (ja) * | 2012-05-22 | 2016-11-24 | ミネベア株式会社 | 振動子及び振動発生器 |
| JP5622808B2 (ja) * | 2012-07-31 | 2014-11-12 | 日本電産コパル株式会社 | 振動アクチュエータ |
| KR101932659B1 (ko) * | 2012-09-10 | 2018-12-28 | 주식회사 엠플러스 | 진동발생장치 |
| KR101308317B1 (ko) * | 2013-03-19 | 2013-10-04 | 장석호 | 분할 코일체를 갖는 코일판과 분할 자석을 갖는 왕복 이동형 자석판을 이용한 발전겸용 전동장치 |
| KR101484858B1 (ko) * | 2013-10-02 | 2015-01-28 | 부전전자 주식회사 | 장방형 수직 선형 엑츄에이터 |
| JP6245950B2 (ja) * | 2013-11-11 | 2017-12-13 | 日本電産コパル株式会社 | 振動アクチュエータ、および携帯情報端末 |
| JP6023691B2 (ja) * | 2013-11-18 | 2016-11-09 | 日本電産コパル株式会社 | 振動アクチュエータ |
| US9660509B2 (en) * | 2014-01-08 | 2017-05-23 | Mplus Co., Ltd. | Linear vibration actuator |
| CN204030834U (zh) * | 2014-07-09 | 2014-12-17 | 瑞声光电科技(常州)有限公司 | 振动电机 |
| WO2016017585A1 (ja) * | 2014-07-28 | 2016-02-04 | 日本電産コパル株式会社 | リニア振動モータ |
| EP3035708A3 (en) * | 2014-12-15 | 2016-09-21 | EM-Tech Co., Ltd. | Slim microspeaker |
| CN204334278U (zh) * | 2014-12-23 | 2015-05-13 | 瑞声光电科技(常州)有限公司 | 振动电机 |
| KR102407449B1 (ko) * | 2015-01-22 | 2022-06-13 | 주식회사 모아텍 | 진동 발생기 |
| JP6505855B2 (ja) * | 2015-01-28 | 2019-04-24 | シャンハイ・シフト・エレクトリクス・カンパニー・リミテッド | パーソナルクリーニングケア用具 |
| CN204425641U (zh) * | 2015-01-29 | 2015-06-24 | 瑞声科技(南京)有限公司 | 电磁扬声器 |
| CN204810105U (zh) * | 2015-07-17 | 2015-11-25 | 瑞声光电科技(常州)有限公司 | 线性电机 |
| EP3326725B1 (en) * | 2015-07-24 | 2020-07-08 | Alps Alpine Co., Ltd. | Vibration-generating device and operation feel-imparting input device using said vibration-generating device |
| CN204886635U (zh) * | 2015-07-30 | 2015-12-16 | 瑞声光电科技(常州)有限公司 | 振动电机 |
| CN204886638U (zh) * | 2015-07-31 | 2015-12-16 | 瑞声光电科技(常州)有限公司 | 微型振动电机 |
| CN204906155U (zh) * | 2015-07-31 | 2015-12-23 | 瑞声光电科技(常州)有限公司 | 振动电机 |
| CN204993010U (zh) * | 2015-08-18 | 2016-01-20 | 歌尔声学股份有限公司 | 一种振动马达和电子设备 |
| KR101621700B1 (ko) * | 2015-09-01 | 2016-05-18 | 주식회사 하이소닉 | 햅틱 액추에이터 |
| CN105207440B (zh) * | 2015-09-23 | 2017-11-21 | 歌尔股份有限公司 | 磁平衡导向线性振动马达 |
| JP6373816B2 (ja) * | 2015-10-08 | 2018-08-15 | ミネベアミツミ株式会社 | 弾性部材付き振動子及び振動発生器 |
| CN205081655U (zh) * | 2015-10-15 | 2016-03-09 | 瑞声光电科技(常州)有限公司 | 双谐振振动电机 |
| CN105406678B (zh) * | 2015-11-25 | 2019-02-15 | 歌尔股份有限公司 | 线性振动马达 |
| CN105406676B (zh) * | 2015-11-25 | 2019-01-11 | 歌尔股份有限公司 | 一种线性振动马达 |
| CN105529896B (zh) * | 2016-02-05 | 2019-01-11 | 歌尔股份有限公司 | 线性振动马达 |
| CN105703596B (zh) * | 2016-03-29 | 2020-05-01 | 金龙机电股份有限公司 | 一种线性电机 |
| CN105871165B (zh) * | 2016-03-31 | 2019-10-18 | 金龙机电股份有限公司 | 一种线性电机 |
| KR101821670B1 (ko) * | 2016-04-05 | 2018-01-25 | 주식회사 이엠텍 | 선형 진동자 |
| JP6692242B2 (ja) * | 2016-07-25 | 2020-05-13 | 日本電産コパル株式会社 | 振動モータ |
| WO2018052027A1 (ja) * | 2016-09-14 | 2018-03-22 | アルプス電気株式会社 | 振動発生装置 |
| WO2018180947A1 (ja) * | 2017-03-30 | 2018-10-04 | 日本電産サンキョー株式会社 | アクチュエータ |
| CN206834963U (zh) * | 2017-04-14 | 2018-01-02 | 瑞声科技(新加坡)有限公司 | 线性振动电机 |
| CN207074948U (zh) * | 2017-04-14 | 2018-03-06 | 瑞声科技(新加坡)有限公司 | 振动器件 |
| CN207098907U (zh) * | 2017-04-14 | 2018-03-13 | 瑞声科技(新加坡)有限公司 | 振动器件和具有该种振动器件的电子设备 |
| CN206834955U (zh) * | 2017-04-14 | 2018-01-02 | 瑞声科技(新加坡)有限公司 | 振动电机 |
| CN206834962U (zh) * | 2017-04-14 | 2018-01-02 | 瑞声科技(新加坡)有限公司 | 线性振动电机 |
| CN207251424U (zh) * | 2017-04-14 | 2018-04-17 | 瑞声科技(新加坡)有限公司 | 振动电机 |
| CN206834961U (zh) * | 2017-04-14 | 2018-01-02 | 瑞声科技(新加坡)有限公司 | 振动电机 |
| JP7116293B2 (ja) * | 2017-11-17 | 2022-08-10 | ミツミ電機株式会社 | 振動アクチュエーター及び携帯機器 |
| CN108233661A (zh) * | 2018-01-03 | 2018-06-29 | 瑞声科技(南京)有限公司 | 振动电机 |
| JP7032208B2 (ja) * | 2018-03-30 | 2022-03-08 | 日本電産サンキョー株式会社 | アクチュエータ、およびその製造方法 |
| US11205937B2 (en) * | 2018-07-18 | 2021-12-21 | Asm Technology Singapore Pte Ltd | Driving system having reduced vibration transmission |
| CN208798206U (zh) * | 2018-08-17 | 2019-04-26 | 瑞声科技(新加坡)有限公司 | 多功能扬声器 |
| JP7222661B2 (ja) * | 2018-10-31 | 2023-02-15 | ミネベアミツミ株式会社 | 振動アクチュエータ及び振動呈示装置 |
| JP7260290B2 (ja) * | 2018-11-30 | 2023-04-18 | ミネベアミツミ株式会社 | 振動呈示装置 |
| JP7386062B2 (ja) * | 2019-05-13 | 2023-11-24 | アルプスアルパイン株式会社 | 振動発生装置 |
| WO2021002242A1 (ja) * | 2019-07-02 | 2021-01-07 | パナソニックIpマネジメント株式会社 | 入力装置、及び発電装置 |
| JP7261699B2 (ja) * | 2019-08-28 | 2023-04-20 | アルプスアルパイン株式会社 | 振動発生装置 |
| JP7371895B2 (ja) | 2019-10-09 | 2023-10-31 | ミネベアミツミ株式会社 | アクチュエーター |
| JP7413738B2 (ja) | 2019-11-29 | 2024-01-16 | ミネベアミツミ株式会社 | 体感振動発生装置 |
| WO2021117391A1 (ja) * | 2019-12-11 | 2021-06-17 | アルプスアルパイン株式会社 | 振動発生装置 |
| JP7729524B2 (ja) * | 2020-09-29 | 2025-08-26 | ミネベアミツミ株式会社 | 振動アクチュエーター及び振動呈示装置 |
| JP7540272B2 (ja) * | 2020-09-30 | 2024-08-27 | ミネベアミツミ株式会社 | 振動アクチュエーター及び電子機器 |
| JP7581590B2 (ja) * | 2020-10-30 | 2024-11-13 | ミネベアミツミ株式会社 | 触感フィードバック装置 |
| CN112564541B (zh) * | 2020-12-09 | 2021-09-28 | 上海大学 | 一种用于低频运动的电磁摩擦电混合式能量收集器 |
| CN214674820U (zh) * | 2020-12-22 | 2021-11-09 | 瑞声光电科技(常州)有限公司 | 一种振动马达 |
| JP7635063B2 (ja) * | 2021-04-28 | 2025-02-25 | ニデックインスツルメンツ株式会社 | アクチュエータ |
| JP7796521B2 (ja) * | 2021-12-20 | 2026-01-09 | ニデックインスツルメンツ株式会社 | アクチュエータ |
-
2023
- 2023-04-28 CN CN202510878822.8A patent/CN120714879A/zh active Pending
- 2023-04-28 EP EP23796555.3A patent/EP4506070A4/en active Pending
- 2023-04-28 WO PCT/JP2023/016957 patent/WO2023210823A1/ja not_active Ceased
- 2023-04-28 CN CN202510879854.XA patent/CN120714882A/zh active Pending
- 2023-04-28 KR KR1020257008138A patent/KR20250043569A/ko active Pending
- 2023-04-28 US US18/860,800 patent/US12463517B2/en active Active
- 2023-04-28 JP JP2023572979A patent/JP7517782B2/ja active Active
- 2023-04-28 CN CN202380034880.1A patent/CN119072364B/zh active Active
- 2023-04-28 JP JP2023572976A patent/JP7487446B2/ja active Active
- 2023-04-28 CN CN202510878253.7A patent/CN120714878A/zh active Pending
- 2023-04-28 CN CN202510879169.7A patent/CN120714880A/zh active Pending
- 2023-04-28 CN CN202510879374.3A patent/CN120714881A/zh active Pending
- 2023-04-28 KR KR1020247035273A patent/KR102782470B1/ko active Active
- 2023-04-28 WO PCT/JP2023/016959 patent/WO2023210824A1/ja not_active Ceased
- 2023-04-28 CN CN202510878214.7A patent/CN120714877A/zh active Pending
-
2024
- 2024-07-01 JP JP2024106118A patent/JP2024114958A/ja active Pending
-
2025
- 2025-09-19 US US19/333,813 patent/US20260018980A1/en active Pending
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012181050A (ja) * | 2011-02-28 | 2012-09-20 | Japan Science & Technology Agency | センサ用構造体、容量式センサ、圧電式センサ、容量式アクチュエータ、及び、圧電式アクチュエータ |
| JP2013187928A (ja) * | 2012-03-06 | 2013-09-19 | Toyota Central R&D Labs Inc | 振動発電装置 |
| JP2015070729A (ja) | 2013-09-30 | 2015-04-13 | 日本電産コパル株式会社 | 情報端末処理装置及び振動発生装置 |
| WO2016185900A1 (ja) * | 2015-05-15 | 2016-11-24 | 株式会社村田製作所 | 駆動装置 |
| US20170341108A1 (en) * | 2016-05-27 | 2017-11-30 | AAC Technologies Pte. Ltd. | Linear vibration motor |
| US20190319568A1 (en) * | 2018-04-11 | 2019-10-17 | Mplus Co., Ltd. | Linear vibration motor |
| JP2021169096A (ja) * | 2018-08-28 | 2021-10-28 | ミネベアミツミ株式会社 | 振動アクチュエータ及び電子機器 |
| JP2021081876A (ja) * | 2019-11-15 | 2021-05-27 | ミネベアミツミ株式会社 | 振動アクチュエータ及び振動呈示装置 |
| JP2021164923A (ja) * | 2020-02-18 | 2021-10-14 | ミネベアミツミ株式会社 | 振動発生装置及び電子機器 |
| JP2022056149A (ja) * | 2020-09-29 | 2022-04-08 | ミネベアミツミ株式会社 | 振動アクチュエーター及び振動呈示装置 |
| JP2022074823A (ja) | 2020-11-05 | 2022-05-18 | Tdk株式会社 | 振動デバイス |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4506070A4 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025263614A1 (ja) * | 2024-06-21 | 2025-12-26 | ミネベアミツミ株式会社 | 振動アクチュエーター及び振動呈示装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20260018980A1 (en) | 2026-01-15 |
| JP7487446B2 (ja) | 2024-05-21 |
| CN119072364A (zh) | 2024-12-03 |
| JP2024114958A (ja) | 2024-08-23 |
| KR20240157120A (ko) | 2024-10-31 |
| CN120714879A (zh) | 2025-09-30 |
| KR102782470B1 (ko) | 2025-03-19 |
| CN120714880A (zh) | 2025-09-30 |
| KR20250043569A (ko) | 2025-03-28 |
| CN120714877A (zh) | 2025-09-30 |
| CN120714882A (zh) | 2025-09-30 |
| JPWO2023210823A1 (https=) | 2023-11-02 |
| CN119072364B (zh) | 2025-07-11 |
| US20250112534A1 (en) | 2025-04-03 |
| JPWO2023210824A1 (https=) | 2023-11-02 |
| JP7517782B2 (ja) | 2024-07-17 |
| US12463517B2 (en) | 2025-11-04 |
| WO2023210824A1 (ja) | 2023-11-02 |
| EP4506070A1 (en) | 2025-02-12 |
| CN120714881A (zh) | 2025-09-30 |
| EP4506070A4 (en) | 2025-07-16 |
| CN120714878A (zh) | 2025-09-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7370822B2 (ja) | 振動アクチュエータ及び振動呈示装置 | |
| JP2025100874A (ja) | 振動アクチュエータ及び振動呈示装置 | |
| JP7371895B2 (ja) | アクチュエーター | |
| JP7646709B2 (ja) | 荷重検出器 | |
| JP2024114958A (ja) | 振動アクチュエータ及び接触型入力装置 | |
| US20200028426A1 (en) | Electronic device | |
| JP2025034992A (ja) | 振動アクチュエータ及び接触型入力装置 | |
| JP2024159082A (ja) | 接触型入力装置 | |
| WO2025070315A1 (ja) | 振動アクチュエータ及び振動提示装置 | |
| JP2025073803A (ja) | 振動アクチュエータ及び振動提示装置 | |
| WO2026005022A1 (ja) | 振動アクチュエータ及び振動提示装置 | |
| KR20260057620A (ko) | 진동 액추에이터 및 접촉형 입력 장치 | |
| JP2025073695A (ja) | 振動アクチュエータ及び接触型入力装置 | |
| WO2023120312A1 (ja) | 触感呈示装置 | |
| JP2025166571A (ja) | 振動アクチュエータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023572976 Country of ref document: JP |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23796555 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202380034880.1 Country of ref document: CN |
|
| ENP | Entry into the national phase |
Ref document number: 20247035273 Country of ref document: KR Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 1020247035273 Country of ref document: KR |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18860800 Country of ref document: US |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023796555 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2023796555 Country of ref document: EP Effective date: 20241106 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWD | Wipo information: divisional of initial pct application |
Ref document number: 1020257008138 Country of ref document: KR |
|
| WWP | Wipo information: published in national office |
Ref document number: 1020257008138 Country of ref document: KR |
|
| WWP | Wipo information: published in national office |
Ref document number: 18860800 Country of ref document: US |
|
| WWG | Wipo information: grant in national office |
Ref document number: 202380034880.1 Country of ref document: CN |
|
| WWG | Wipo information: grant in national office |
Ref document number: 18860800 Country of ref document: US |