WO2023119365A1 - ステアリング装置 - Google Patents
ステアリング装置 Download PDFInfo
- Publication number
- WO2023119365A1 WO2023119365A1 PCT/JP2021/047030 JP2021047030W WO2023119365A1 WO 2023119365 A1 WO2023119365 A1 WO 2023119365A1 JP 2021047030 W JP2021047030 W JP 2021047030W WO 2023119365 A1 WO2023119365 A1 WO 2023119365A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- rail
- rail mechanism
- steering
- rolling element
- vehicle
- Prior art date
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D1/00—Steering controls, i.e. means for initiating a change of direction of the vehicle
- B62D1/02—Steering controls, i.e. means for initiating a change of direction of the vehicle vehicle-mounted
- B62D1/16—Steering columns
- B62D1/18—Steering columns yieldable or adjustable, e.g. tiltable
- B62D1/183—Steering columns yieldable or adjustable, e.g. tiltable adjustable between in-use and out-of-use positions, e.g. to improve access
Abstract
ステアリング装置(100)は、操舵部材(110)が取り付けられる操舵入力軸である軸部材(121)と、可動体(130)と、第一レール機構(200)及び第二レール機構(300)とを備える。可動体(130)は、軸部材(121)を回転可能に支持する。第一レール機構(200)及び第二レール機構(300)は、可動体(130)の、車両の前後方向への移動をガイドする。第一レール機構(200)及び第二レール機構(300)は、車両の幅方向において互いに異なる位置に配置されている。第一レール機構(200)は、車両の幅方向において、軸部材(121)とは異なる位置に配置されており、第二レール機構(300)は、車両の上下方向において、軸部材(121)よりも上の位置に配置されている。
Description
本発明は、ステアリングホイール等の操舵部材を移動させることで運転者の前方空間を広げることのできるステアリング装置に関する。
車両の自動運転においてシステムが責任をもつ自動運転レベル4以上の状態では、運転者は、車両の操作に責任を持つ必要がないため、ステアリングホイールを持つ必要がなくなる。従って自動運転時にステアリングホイールが移動し運転者の前方の空間が広く確保されれば、運転者の快適性または安全性を高めることが出来る。例えば特許文献1には、ステアリングホイールを回転可能に支持するハウジングと、ハウジングから横方向(車両の幅方向)に延びるアームと、アームを前後方向に移動可能に支持し、かつ、上下方向に並ぶ2つのレールとを備えるステアリング装置が開示されている。このステアリング装置では、ハウジングの左側方に位置する2つのレールに沿ってアームが車両の前後方向に移動する。これにより、ハウジングに支持されたステアリングホイールは、運転者がステアリングホイールを操作する位置と、その前方の位置との間で移動する。
ステアリング装置において、ステアリングホイール(操舵部材)の安定的な支持のためには、ステアリングホイールを支持する構造に、比較的に高い剛性が求められる。これに対し、特許文献1記載の従来のステアリング装置では、ステアリングホイールは、コラム軸を介してハウジングに支持されており、ハウジングは、ハウジングから側方に延びるアームを介して、ハウジングの側方に位置する2つのレールに支持されている。従って、例えばステアリングホイールに上下方向の荷重がかけられた場合、2つのレールに比較的に大きな回転モーメントが作用する可能性がある。つまり、当該ステアリング装置の構造では、ステアリングホイールの安定的な支持のための剛性(支持剛性)が不足する可能性がある。
本発明は、本願発明者らが上記課題に新たに着目することによってなされたものであり、運転者の前方空間を広げることができ、かつ、操舵部材を安定的に支持できるステアリング装置を提供することを目的とする。
上記目的を達成するために、本発明の一態様に係るステアリング装置は、車両の操舵を行うためのステアリング装置であって、操舵部材が取り付けられる操舵入力軸と、前記操舵入力軸を回転可能に支持する可動体と、前記可動体の、前記車両の前後方向への移動をガイドする第一レール機構及び第二レール機構であって、前記車両の幅方向において互いに異なる位置に配置された第一レール機構及び第二レール機構と、を備え、前記第一レール機構は、前記車両の幅方向において、前記操舵入力軸とは異なる位置に配置されており、前記第二レール機構は、前記車両の上下方向において、前記操舵入力軸よりも上の位置に配置されている。
本発明によれば、運転者の前方空間を広げることができ、かつ、操舵部材を安定的に支持できるステアリング装置を提供することができる。
以下、本発明に係るステアリング装置の実施の形態(変形例を含む)について、図面を参照しながら具体的に説明する。なお、以下で説明する実施の形態は、いずれも包括的または具体的な例を示すものである。以下の実施の形態で示される数値、形状、材料、構成要素、構成要素の配置位置及び接続形態、ステップ及びステップの順序などは、一例であり、本発明を限定する主旨ではない。
図面は、本発明を示すために適宜強調、省略、または比率の調整を行った模式的な図である場合があり、つまり、実際の形状、位置関係、及び比率とは異なる場合がある。さらに、以下の実施の形態において、平行及び直交などの、相対的な方向または姿勢を示す表現が用いられる場合があるが、これらの表現は、厳密には、その方向または姿勢ではない場合も含む。例えば、2つの方向が平行である、とは、当該2つの方向が完全に平行であることを意味するだけでなく、実質的に平行であること、すなわち、例えば数%程度の差異を含むことも意味する。
(実施の形態)
[1.ステアリングシステムの構成概要]
まず、図1を参照しながら、本実施の形態のステアリング装置100を備えるステアリングシステム10の構成概要を説明する。図1は、実施の形態に係るステアリングシステム10の構成概要を示す模式図である。
[1.ステアリングシステムの構成概要]
まず、図1を参照しながら、本実施の形態のステアリング装置100を備えるステアリングシステム10の構成概要を説明する。図1は、実施の形態に係るステアリングシステム10の構成概要を示す模式図である。
本実施の形態に係るステアリングシステム10は、例えば手動運転モードと自動運転モードとを切り替えることができる乗用車、バス、トラック、建機、または農機などの車両に搭載される装置である。
ステアリングシステム10は、図1に示すように、運転者に操作される操舵部材110を有するステアリング装置100と、転舵輪710を転舵させる転舵機構部102とを備える。ステアリングシステム10は、例えば手動運転モードにおいて、操舵部材110の回転角などをセンサ等で読み取り、センサ等の信号に基づいて軸体730が左右に往復動することで転舵輪710を転舵するシステムである。このようなシステムは、例えばSBW(Steer By Wire)システムと呼ばれる。
ステアリングシステム10において、車両の操舵に関する動作及び処理における上流側に位置するステアリング装置100では、操舵部材110は、操舵入力軸の一例である軸部材121に取り付けられており、軸部材121は、可動体130に回転可能に支持されている。可動体130には、反力発生装置125が備えられており、軸部材121には、反力発生装置125による回転駆動力が作用する。これにより、運転者が操舵部材110を操作する際の反力が操舵部材110に与えられる。また、反力発生装置125による回転駆動力は、操舵部材110の回転位置を、転舵輪710の転舵角と同期させるためにも用いられる。
ステアリング装置100の下流に位置する転舵機構部102では、軸体730の車両の幅方向(図1における左右方向)の移動により、タイロッド711を介して軸体730に接続された転舵輪710が転舵する。具体的には、手動運転モードでは、ステアリング装置100から送信される操舵部材110の回転角等を示す信号に基づき、転舵用アクチュエータ750が動作する。これにより、軸体730が車両の幅方向に移動し、転舵輪710が転舵する。つまり、操舵部材110の操作に応じて、転舵輪710が転舵する。自動運転モードでは、車両が備える自動運転のためのコンピュータ(図示せず)から送信される信号等に基づいて転舵用アクチュエータ750が動作し、これにより、操舵部材110の操作によらず、転舵輪710が転舵する。図1では、転舵用アクチュエータ750の駆動力をベルトを用いて軸体730に伝達する構成が例示されているが、転舵用アクチュエータ750の駆動力の軸体730への伝達方法に特に限定はない。例えば、転舵用アクチュエータ750の回転軸に固定されたピニオン歯車を介して、転舵用アクチュエータ750の駆動力が軸体730に伝達されてもよい。
[2.ステアリング装置の基本構成]
次に、図2~図5を参照しながら、実施の形態に係るステアリング装置100の基本構成について説明する。図2は、実施の形態に係るステアリング装置100の外観を示す第1の斜視図である。図3は、図2に対応するステアリング装置100の側面図である。図2では、可動体130が通常位置にある場合のステアリング装置100が図示されており、操舵部材110は、おおよその形状が二点鎖線で図示されている。図3~図5では、操舵部材110の図示は省略されている。可動体130についての「通常位置」とは、運転者による操舵部材110の操作のための可動体130の位置である。図4は、実施の形態に係るステアリング装置100の外観を示す第2の斜視図である。図5は、実施の形態に係るステアリング装置100の外観を示す第3の斜視図である。図4及び図5では、可動体130が格納位置にある場合のステアリング装置100が図示されている。可動体130についての「格納位置」とは、通常位置よりも前方の所定の位置であり、運転者の前方空間を広げるために操舵部材110を前方に移動させた場合の可動体130の位置である。
次に、図2~図5を参照しながら、実施の形態に係るステアリング装置100の基本構成について説明する。図2は、実施の形態に係るステアリング装置100の外観を示す第1の斜視図である。図3は、図2に対応するステアリング装置100の側面図である。図2では、可動体130が通常位置にある場合のステアリング装置100が図示されており、操舵部材110は、おおよその形状が二点鎖線で図示されている。図3~図5では、操舵部材110の図示は省略されている。可動体130についての「通常位置」とは、運転者による操舵部材110の操作のための可動体130の位置である。図4は、実施の形態に係るステアリング装置100の外観を示す第2の斜視図である。図5は、実施の形態に係るステアリング装置100の外観を示す第3の斜視図である。図4及び図5では、可動体130が格納位置にある場合のステアリング装置100が図示されている。可動体130についての「格納位置」とは、通常位置よりも前方の所定の位置であり、運転者の前方空間を広げるために操舵部材110を前方に移動させた場合の可動体130の位置である。
本実施の形態に係るステアリング装置100は、図2~図5に示すように、可動体130と、可動体130に取り付けられたコラム部120と、可動体130の前後方向の移動をガイドする第一レール機構200及び第二レール機構300と、を備えている。コラム部120は、反力発生装置125と、反力発生装置125に回転可能に支持された軸部材121とを有する。可動体130は、反力発生装置125が固定された本体部131と、前後方向の駆動力(推進力)を受けるナット部134とを有する。つまり、可動体130は、可動体130に固定された反力発生装置125を介して軸部材121を支持している。コラム部120は、可動体130の移動に伴って移動する。つまり、軸部材121に取り付けられた操舵部材110も、可動体130の移動に伴って移動する。
反力発生装置125は、タイヤと操舵部材とが機械的に接続されている従来の車両において、運転中に操舵部材に生じる力などを反力として再現する装置である。反力発生装置125は、図5に示すように、軸部材121を支持する軸支持部126と、軸部材121に与える回転駆動力を発生する反力モータ127とを有している。本実施の形態では、軸支持部126と反力モータ127とは、図2及び図5に示すように、車両の幅方向(本実施の形態ではY軸方向)でずらされた位置に配置されている。これにより、反力発生装置125の、車両の前後方向におけるサイズを比較的に小さくできる。反力モータ127の回転駆動力は、例えばベルトによって、軸支持部126に支持されている軸部材121に与えられる。反力発生装置125は、反力モータ127の回転速度を落として軸部材121に伝達する減速装置及び軸部材121の回転角を検出するセンサ等を有しているが、これらの詳細な説明は省略する。
反力発生装置125は、上記構成により、軸部材121を介して操舵部材110に反力を与える。また、反力発生装置125は、操舵部材110のステアリング軸S周りの回転位置を制御することもできる。ステアリング軸Sは、軸部材121の回転中心を通り、車両の前後方向に延びる仮想軸(図2参照、本実施の形態ではX軸に平行)である。
「車両の前後方向」とは、一般に、車両の直進方向と平行な方向、運転席の背もたれとステアリング装置100との並び方向、または、車両の前部と後部とを結ぶ方向等である。例えば、運転者の上半身に対する操舵部材110の位置は、「前方」である。軸部材121及び操舵部材110の回転中心であるステアリング軸Sは、「車両の前後方向」と厳密に一致している必要はない。例えば車両が水平な路面に停止している状態において、操舵部材110がやや上を向くように、ステアリング軸Sが水平方向に対して傾けられていてもよい。また、例えば「操舵部材110が車両の前後方向に移動する」という場合も同様であり、その移動の軌跡は、「車両の前後方向」と厳密に一致している必要はない。例えば、運転者から見て、操舵部材110が、運転者の前方の所定の位置と、さらにその前方かつ斜め下方の位置との間を移動する場合であっても、「操舵部材110は、車両の前後方向に移動する」と表現される。このことは、操舵部材110の移動の軌跡が直線か曲線か等に関わらず適用される。また、「車両の前後方向」は、以下、単に「前後方向」とも表現される。
操舵部材110は、運転者が手動で操作する部材であり、軸部材121の軸方向の端部(運転者側の端部)に着脱可能に取り付けられる。操舵部材110は、ステアリング軸Sを中心に回転し、これに伴って、操舵部材110に連結された軸部材121もステアリング軸Sを中心に回転する。手動運転モードでは、この回転量等に基づいて、上述のように、車両の1以上の転舵輪710が転舵される。操舵部材110と反力発生装置125との間には、図示しないウインカーレバー等が配置されており、運転者は、操舵部材110を操作する場合、ウインカーレバー等の操作も行うことができる。操舵部材110の形状及びサイズは、図2に示される形状及びサイズには限定されない。操舵部材110の形状及びサイズは、例えば、ステアリング装置100のサイズ及び形状等に応じて適宜決定することができる。
本実施の形態では、操舵部材110が取り付けられたコラム部120は、可動体130に固定されており、可動体130は、第一レール機構200及び第二レール機構300によって前後方向に移動可能に支持されている。第一レール機構200及び第二レール機構300は、ブラケット500に固定されており、ブラケット500は、図示しない車両に固定されている。つまり、第一レール機構200及び第二レール機構300は、ブラケット500を介して車両に固定されている。可動体130は、第一レール機構200及び第二レール機構300にガイドされながら、車両に対して相対的に前後方向に移動する。これにより、可動体130は、運転者による操舵部材110の操作のための位置である通常位置(図2及び図3参照)と、通常位置よりも前方の格納位置(図4及び図5参照)との間で移動することができる。可動体130の格納位置は、運転者の前方に位置するダッシュボードの内部空間のいずれかに設定される。本実施の形態では、可動体130は、図5に示すように、コラム部120が有する軸部材121の後端部が、ブラケット500の下方の所定の位置に到達するまで前方に移動することができる。これにより、軸部材121の後端部に取り付けられた操舵部材110を、ダッシュボードの内部に収容することが可能である。なお、この場合、車両の幅方向における、第一レール機構200と第二レール機構300との間の空間を、操舵部材110の収容領域として使用することができる。このことは、図6を用いて後述する。
本実施の形態に係るステアリング装置100は、可動体130の前後方向の移動を駆動するための駆動装置140を備えている。駆動装置140は、図2~図5に示すように、移動用アクチュエータ141と、送りねじ145と、伝達機構部142とを有している。移動用アクチュエータ141及び伝達機構部142は、ブラケット500の前端部に固定された取付部材510に固定されている。送りねじ145は、前端部が取付部材510に回転可能に支持されており、後端部が、ブラケット500の後端部に固定された軸支持部材520に、回転可能に支持されている。このように本実施の形態では、駆動装置140は、ブラケット500に固定されている。
移動用アクチュエータ141が発生する回転力は、伝達機構部142を介して送りねじ145に伝達され、これにより送りねじ145が回転する。送りねじ145は、可動体130に固定されたナット部134に螺合しており、これにより、可動体130は前後方向に移動する。この移動の際、可動体130は、第一レール機構200及び第二レール機構300(以下、2つのレール機構(200、300)とも称される。)にガイドされながら移動する。
このように、本実施の形態では、コラム部120が固定された可動体130は、2つのレール機構(200、300)に支持され、かつ、前後方向の移動がガイドされる。2つのレール機構(200、300)は、車両の幅方向で互いに異なる位置に配置されており、これにより、可動体130は、安定的に支持されながら前後方向に移動することができる。以下、図6~図10を参照しながら、2つのレール機構(200、300)の構成及び動作を中心に、ステアリング装置100の構成及び動作について詳細に説明する。
[3.ステアリング装置の構成及び動作の詳細]
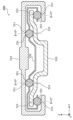
図6は、実施の形態に係るステアリング装置100の、運転者側から見た場合の図(背面図)である。図6では、2つのレール機構(200、300)の構成を明確に示すために、駆動装置140及び軸支持部材520等の図示は省略されており、操舵部材110は、おおよその形状が二点鎖線で図示されている。図7は、実施の形態に係る第一レール機構200の分解斜視図である。図8は、実施の形態に係る第二レール機構300の分解斜視図である。図9は、実施の形態に係る第一レール機構200の断面図である。図9では、図7におけるIX-IX線断面が図示されている。図10は、実施の形態に係る第二レール機構300の断面図である。図10では、図8におけるX-X線断面が図示されている。
図6は、実施の形態に係るステアリング装置100の、運転者側から見た場合の図(背面図)である。図6では、2つのレール機構(200、300)の構成を明確に示すために、駆動装置140及び軸支持部材520等の図示は省略されており、操舵部材110は、おおよその形状が二点鎖線で図示されている。図7は、実施の形態に係る第一レール機構200の分解斜視図である。図8は、実施の形態に係る第二レール機構300の分解斜視図である。図9は、実施の形態に係る第一レール機構200の断面図である。図9では、図7におけるIX-IX線断面が図示されている。図10は、実施の形態に係る第二レール機構300の断面図である。図10では、図8におけるX-X線断面が図示されている。
本実施の形態では、可動体130は、図6に示すように、車両の幅方向(Y軸方向)で離間した位置に、それぞれが直動ガイドである2つのレール機構(200、300)が配置されている。2つのレール機構(200、300)のそれぞれは、いずれも前後方向に長尺なレールが組み合わされて構成されている。
具体的には、第一レール機構200は、図7及び図9に示すように、第一固定レール210と、第一固定レール210に対してスライド可能に取り付けられた第一移動レール220と、複数の第一転動体列250とを有する。第一転動体列250は、第一移動レール220の第一固定レール210に対する移動方向(X軸方向)に並ぶ複数の第一転動体251を含む。第一転動体251は、第一固定レール210が有する第一軌道面211と、第一移動レール220が有する第二軌道面221との間に配置されている。本実施の形態では、図7及び図9に示すように、第一固定レール210は2つの第一軌道面211を有し、第一移動レール220は2つの第二軌道面221を有する。第一固定レール210及び第一移動レール220は、2つの第二軌道面221のそれぞれが、Z軸方向において第一軌道面211と対向するように組み合わされている。つまり、第一レール機構200には、Z軸方向で対向する第一軌道面211と第二軌道面221との組が2つ存在する。2組の第一軌道面211及び第二軌道面221のそれぞれにおいて、第一軌道面211と第二軌道面221との間に第一転動体列250が配置されている。本実施の形態では、第一軌道面211は、X軸方向に長尺状でかつ第二軌道面221から離れる方向に凹む湾曲面(溝の内面)である。第二軌道面221は、X軸方向に長尺状でかつ第一軌道面211から離れる方向に凹む湾曲面(溝の内面)である。第一転動体列250に含まれる複数の第一転動体251のそれぞれは、本実施の形態では金属製の球体(ベアリング用ボール)である。
本実施の形態において、第一固定レール210と第一移動レール220との間に配置される2つの第一転動体列250のそれぞれには、2つのスペーサ251a(図7参照)が含まれている。スペーサ251aは、第一転動体列250に含まれる複数の第一転動体251の直径と同一又はわずかに小さい直径を有する球体である。第一転動体列250に含まれる複数の第一転動体251のぞれぞれは、第一固定レール210と第一移動レール220との間に配置された板状のリテーナ230によって回動可能に保持されている。複数の第一転動体251のそれぞれは、リテーナ230に保持されることで、互いの相対的な位置を維持しながら転動する。リテーナ230は、それぞれが第一転動体251を保持するための複数の第一転動体用ポケット(開口部)231aと、スペーサ251aを保持するための複数のスペーサ用ポケット(開口部)231bとを有している。スペーサ用ポケット231bの直径は、第一転動体用ポケット231aの直径より小さい。第一転動体列250に含まれる複数のスペーサ251aは、2つの半球体を有し、これら2つの半球体でリテーナ230のスペーサ用ポケット231bの周縁を上下(Z軸)方向から挟んだ状態で2つの半球体を接合することで、リテーナ230に固定されている。リテーナ230はスペーサ251aの中心位置を通る位置に固定され、これにより、第一軌道面211及び第二軌道面221に対するリテーナ230のZ軸方向位置がZ軸方向中心に位置決めされる。その結果、第一転動体列250に含まれる複数の第一転動体251が適切に転動することができる。スペーサ251aは、2つの第一転動体列250それぞれに対して、少なくとも2つあればよい。スペーサ251aの2つの半球体は、一方の対向面に凸部を形成し、他方の対向面に凹部を形成して、凹凸圧嵌で接合するが、これに限定されない。リテーナ230の第一転動体用ポケット231aとスペーサ用ポケット231bの配置順序は適宜設定できる。
このように構成された第一レール機構200において、第一固定レール210は、図2~図6に示すように、ブラケット500に固定されている。つまり、第一固定レール210は、ブラケット500を介して車両に固定されている。第一移動レール220は、図6に示すように、可動体130の本体部131に固定されている。可動体130及び可動体130に固定されたコラム部120は、第一移動レール220の前後方向に伴って前後方向に移動する。
第一移動レール220は、第一固定レール210との間に、複数(本実施の形態では2つ)の第一転動体列250が配置されていることで、第一固定レール210に対して滑らかに前後方向に移動する。この移動の際、2つの第一転動体列250は、リテーナ230に保持された状態を維持しながら、第一固定レール210及び第一移動レール220に対して前後方向に移動する。第一固定レール210及び第一移動レール220のそれぞれには、リテーナ230に当接するストッパが配置されている。これにより、2つの第一転動体列250及びリテーナ230の、第一固定レール210及び第一移動レール220からの脱落が抑制される。具体的には、図7に示すように、第一固定レール210には、X軸方向で互いに離間した位置に第一固定ストッパ215及び216が配置されている。第一移動レール220には、X軸方向で互いに離間した位置に第一移動ストッパ225及び226が配置されている。これにより、リテーナ230は、第一固定レール210に対して、第一固定ストッパ215と第一固定ストッパ216との間でのみ移動可能である。さらに、リテーナ230は、第一移動レール220に対し、第一移動ストッパ225と第一移動ストッパ226との間でのみ移動可能である。この場合、リテーナ230は、第一移動レール220の前後方向の移動に伴って前後方向に移動した場合であっても、第一固定レール210及び第一移動レール220から脱落しない。その結果、リテーナ230に保持されている2つの第一転動体列250も、第一固定レール210及び第一移動レール220から脱落しない。
さらに、リテーナ230が、第一固定レール210の後端側の第一固定ストッパ215と、第一移動レール220の前端側の第一移動ストッパ226とに挟まれた状態では、第一移動レール220は、その位置から後方には移動できない。つまり、第一固定ストッパ215と第一移動ストッパ226とは、第一移動レール220の後方への移動(第一固定レール210から後方への抜け出し)を規制する規制部材としても機能する。また、リテーナ230が、第一固定レール210の前端側の第一固定ストッパ216と、第一移動レール220の後端側の第一移動ストッパ225とに挟まれた状態では、第一移動レール220は、その位置から前方には移動できない。つまり、第一固定ストッパ216と第一移動ストッパ225とは、第一移動レール220の前方への移動(第一固定レール210から前方への抜け出し)を規制する規制部材としても機能する。
本実施の形態に係る第二レール機構300は、図8及び図10に示すように、第二固定レール310と、第二固定レール310に対してスライド可能に取り付けられた第二移動レール320と、複数の第二転動体列350とを有する。第二転動体列350は、第二移動レール320の第二固定レール310に対する移動方向(X軸方向)に並ぶ複数の第二転動体351を含む。第二転動体列350は、第二固定レール310が有する第三軌道面311と、第二移動レール320が有する第四軌道面321との間に配置されている。本実施の形態では、図8及び図10に示すように、第二固定レール310は4つの第三軌道面311を有し、第二移動レール320には4つの第四軌道面321を有する。これら8つの軌道面のそれぞれは、第二固定レール310または第二移動レール320が有する平面部分の一部によって形成されている。第二固定レール310及び第二移動レール320は、4つの第四軌道面321のそれぞれが、Z軸方向において第三軌道面311と対向するように組み合わされている。つまり、第二レール機構300には、Z軸方向で対向する第三軌道面311と第四軌道面321との組が4つ存在する。4組の第三軌道面311及び第四軌道面321のそれぞれにおいて、第三軌道面311と第四軌道面321との間に第二転動体列350が配置されている。このように、第二レール機構300は、4つの第二転動体列350を有している。図10に示すように、4つの第二転動体列350の内の、2つの第二転動体列350は、第二移動レール320の下方(Z軸マイナス方向)に配置され、残りの2つの第二転動体列350は、第二移動レール320の上方(Z軸プラス方向)に配置される。本実施の形態では、第三軌道面311及び第四軌道面321のそれぞれは、X軸方向に長尺状な平面である。複数の第二転動体351のそれぞれは、本実施の形態では、第一転動体251と同じく、金属製の球体(ベアリング用ボール)である。
本実施の形態において、第二移動レール320の下方(Z軸マイナス方向)に配置された2つの第二転動体列350のそれぞれには、2つのスペーサ351a(図8参照)が含まれている。スペーサ351aは、第二転動体列350に含まれる複数の第二転動体351の直径と同一又はわずかに小さい直径を有する球体である。第二転動体列350に含まれる複数の第二転動体351のぞれぞれは、第二固定レール310と第二移動レール320との間に配置された板状のリテーナ330によって回動可能に保持されている。複数の第二転動体351のそれぞれは、リテーナ330に保持されることで、互いの相対的な位置を維持しながら転動する。リテーナ330は、それぞれが第二転動体351を保持するための複数の第二転動体用ポケット(開口部)331と、スペーサ351aを保持するための複数のスペーサ用ポケット(開口部)とを有している。複数のスペーサ用ポケットは、図8には表れていなが、リテーナ330のZ軸マイナス方向側に設けられている。スペーサ用ポケットの直径は、第二転動体用ポケット331の直径より小さい。第二転動体列350に含まれる複数のスペーサ351aは、2つの半球体を有し、これら2つの半球体でリテーナ330のスペーサ用ポケットの周縁を上下(Z軸)方向から挟んだ状態で2つの半球体を接合することで、リテーナ330に固定されている。リテーナ330はスペーサ351aの中心位置を通る位置に固定され、これにより、第三軌道面311及び第四軌道面321に対するリテーナ330のZ軸方向位置がZ軸方向中心に位置決めされる。その結果、第二転動体列350に含まれる複数の第二転動体351が適切に転動することができる。スペーサ351aは、図8に示す4つの第二転動体列350のうちの2つの第二転動体列350のそれぞれに対して、少なくとも2つあればよい。4つの第二転動体列350のそれぞれに、少なくとも2つスペーサ351aが含まれてもよい。スペーサ351aの2つの半球体は、一方の対向面に凸部を形成し、他方の対向面に凹部を形成して、凹凸圧嵌で接合するが、これに限定されない。リテーナ330の第二転動体用ポケット331とスペーサ用ポケットの配置順序は適宜設定できる。
このように構成された第二レール機構300において、第二固定レール310は、図2~図6に示すように、ブラケット500の車両の幅方向(Y軸方向)に平行な取付面に固定されている。つまり、第二固定レール310は、ブラケット500を介して車両に固定されている。第二移動レール320は、図6に示すように、可動体130に固定されている。つまり、可動体130は、第一移動レール220及び第二移動レール320に固定されている。可動体130及び可動体130に固定されたコラム部120は、第一移動レール220及び第二移動レール320の前後方向の移動に伴って前後方向に移動する。
第二移動レール320は、第二固定レール310との間に、複数(本実施の形態では4つ)の第二転動体列350が配置されていることで、第二固定レール310に対して滑らかに前後方向に移動する。4つの第二転動体列350を保持するリテーナ330は、第一レール機構200が有するリテーナ230と同様に前後方向に移動自在である。そのため、第二固定レール310及び第二移動レール320のそれぞれには、リテーナ330に当接するストッパが配置されており、これにより、4つの第二転動体列350及びリテーナ330の、第二固定レール310及び第二移動レール320からの脱落が抑制される。具体的には、図8に示すように、第二固定レール310には、X軸方向で互いに離間した位置に第二固定ストッパ315及び316が配置されている。第二移動レール320には、X軸方向で互いに離間した位置に第二移動ストッパ325及び326が配置されている。これにより、リテーナ330は、第二固定レール310に対して、第二固定ストッパ315と第二固定ストッパ316との間でのみ移動可能である。さらに、リテーナ330は、第二移動レール320に対し、第二移動ストッパ325と第二移動ストッパ326との間でのみ移動可能である。その結果、リテーナ330は、第二固定レール310及び第二移動レール320から脱落せず、従って、4つの第二転動体列350も、第二固定レール310及び第二移動レール320から脱落しない。
さらに、第二固定ストッパ315と第二移動ストッパ326とは、リテーナ330を前後方向で挟んだ状態になることで、第二移動レール320の後方への移動(第二固定レール310から後方への抜け出し)を規制する規制部材としても機能する。第二固定ストッパ316と第二移動ストッパ325とは、リテーナ330を前後方向で挟んだ状態になることで、第二移動レール320の前方への移動(第二固定レール310から前方への抜け出し)を規制する規制部材としても機能する。
第一移動レール220の第一固定レール210に対する前後方向の移動は、上述のように駆動装置140によって駆動されている。この駆動装置140の制御に、ストッパによる第一移動レール220または第二移動レール320の停止の検出結果が用いられてもよい。具体的には、第一固定ストッパ215等のストッパによって第一移動レール220が停止した場合、駆動装置140を制御する制御装置(図示せず)は、第一移動レール220が停止することによる移動用アクチュエータ141の負荷トルクの増加を検出する。制御装置は、当該負荷トルクの増加を検出した場合、移動用アクチュエータ141の動作を停止させる。第一移動レール220及び第二移動レール320の停止にストッパを用いることは必須ではない。例えば、可動体130等の位置を検出するセンサの検出結果に基づいて、制御装置が駆動装置140を制御することで、第一移動レール220及び第二移動レール320の移動を停止させてもよい。
以上説明したように、本実施の形態に係るステアリング装置100は、操舵部材110が取り付けられる操舵入力軸である軸部材121と、可動体130と、第一レール機構200及び第二レール機構300とを備える。可動体130は、軸部材121を回転可能に支持する。第一レール機構200及び第二レール機構300は、可動体130の、車両の前後方向への移動をガイドする。第一レール機構200及び第二レール機構300は、車両の幅方向において互いに異なる位置に配置されている。第一レール機構200は、車両の幅方向において、軸部材121とは異なる位置に配置されており、第二レール機構300は、車両の上下方向において、軸部材121よりも上の位置に配置されている(図6参照)。
この構成によれば、運転者に操作される操舵部材110は、軸部材121を介して可動体130に支持される。この可動体130は、車両の上下方向から見た場合に、車両の幅方向に並ぶ2つのレール機構(200、300)によって前後方向に移動可能に支持される。さらに、第一レール機構200は、車両の幅方向で軸部材121と離間した位置にあり、第二レール機構300は、車両の上下方向で軸部材121よりも上の位置にある。従って、軸部材121から見ると、左右方向(車両の幅方向)の移動については、主として第一レール機構200に規制され、上下方向の移動については、主として第二レール機構300に規制される。これにより、軸部材121に上下左右いずれかの方向の外力が付加されることで可動体130に比較的に大きな力が掛けられた場合であっても、2つのレール機構(200、300)によって可動体130は安定的に支持される。つまり、ステアリング装置100は、可動体130の支持についての比較的に高い剛性を有しており、その結果、軸部材121に取り付けられた操舵部材110の支持の安定性が向上される。第二レール機構300は、車両の上下方向において軸部材121よりも上の位置に配置されている。そのため、ステアリング装置100の下部にレール機構が配置された場合に生じる、運転者の脚またはブレーキペダル等の他の部材と、レール機構との干渉の問題が生じない。このように、本実施の形態に係るステアリング装置100は、運転者の前方空間を広げることができ、かつ、操舵部材110を安定的に支持できるステアリング装置である。
本実施の形態において、第一レール機構200及び第二レール機構300は、以下のように構成されている。第一レール機構200は、車両に固定された第一固定レール210と、第一固定レール210に対してスライド可能に取り付けられた第一移動レール220と、複数の第一転動体列250とを有する。第一固定レール210は、複列の第一軌道面211を有する。第一移動レール220は、複列の第二軌道面221を有する。複数の第一転動体列250は、複列の第一軌道面211と複列の第二軌道面221との間に配置されている。複数の第一転動体列250のそれぞれは、転動自在な複数の第一転動体251を含んでいる。第二レール機構300は、車両に固定された第二固定レール310と、第二固定レール310に対してスライド可能に取り付けられた第二移動レール320と、複数の第二転動体列350とを有する。第二固定レール310は、複列の第三軌道面311を有する。第二移動レール320は、複列の第四軌道面321を有する。複数の第二転動体列350は、複列の第三軌道面311と複列の第四軌道面321との間に配置されている。複数の第二転動体列350のそれぞれは、転動自在な複数の第二転動体351を含んでいる。
この構成によれば、第一レール機構200では、第一軌道面211と第二軌道面221との間に配置された第一転動体列250が有する複数の第一転動体251が転動することで、第一固定レール210に対して第一移動レール220がスライドする。さらに、第一レール機構200には、第一軌道面211、第二軌道面221、及び、これらの間に配置された第一転動体列250の組み合わせが複数配置されている。そのため、第一レール機構200の全体としての剛性が確保され、かつ、伸縮動作の滑らかさも確保される。第二レール機構300も同様であり、第二固定レール310に対する第二移動レール320のスライドのための構成として、第三軌道面311、第四軌道面321、及び、これらの間に配置された第二転動体列350の組み合わせを複数有している。これにより、第二レール機構300の剛性が確保され、かつ、伸縮動作の滑らかさも確保される。従って、このような2つのレール機構(200、300)を備えるステアリング装置100によれば、操舵部材110をより安定的に支持できる。
本実施の形態では、第一レール機構200及び第二レール機構300において、転動体の接触角が互いに異なっている。具体的には、図9及び図10に示すように、複数の第一転動体251それぞれの、第一軌道面211及び第二軌道面221に対する接触角αと、複数の第二転動体351それぞれの、第三軌道面311及び第四軌道面321に対する接触角βとは、互いに異なる。
ここで、2つのレール機構(200、300)において転動体の接触角が仮に同じであるとした場合、第一移動レール220及び第二移動レール320の、本来的な移動方向(X軸方向)と直交する方向における移動(変位)し難い方向が一致する。その結果、ともに可動体130に接続された第一移動レール220及び第二移動レール320の移動方向が厳密に平行でない場合、一方の移動が他方によって拘束される可能性がある。この点、本実施の形態では、2つのレール機構(200、300)において転動体の接触角が互いに異なる。従って、2つのレール機構(200、300)の一方の伸縮動作が、他方の伸縮動作の妨げとなり難い。
さらに、本実施の形態では、図9に示すように、複数の第一転動体251のそれぞれの、第一軌道面211及び第二軌道面221に対する接触点の合計数は3以上である。
この構成によれば、第一レール機構200では、第一固定レール210と第一移動レール220との間で転動する第一転動体251は、第一転動体251の中心から見て、3以上の方向で、軌道面(第一軌道面211及び第二軌道面221)と接触する。従って、第一移動レール220は、移動方向(X軸方向)と直交する方向において、当該3以上の方向に移動(変位)し難い。つまり、第一レール機構200は、当該3以上の方向についての耐荷重性が比較的に高い。
以上の第一レール機構200及び第二レール機構300のそれぞれにおける転動体の接触角についての特徴を、図9及び図10を参照しながら、さらに具体的に説明する。本実施の形態に係る第一レール機構200において、1つの第一転動体251に着目した場合、図9に示すように、第一転動体251は、第一軌道面211と第二軌道面221との間に配置されている。第一軌道面211及び第二軌道面221のそれぞれは、ともに、第一転動体251の一部を収容可能な同一形状の溝の内面である。具体的には、この溝は、例えばゴシックアーク溝と呼ばれる形状の溝である。本実施の形態では、軌道面(溝)の延在方向(X軸方向)に直交する断面において、第一軌道面211及び第二軌道面221のそれぞれは、球体である第一転動体251と2点で接触している。この場合、第一転動体251の第一軌道面211及び第二軌道面221に対する接触角は図9におけるαである。本実施の形態では、第一転動体251は、Z軸方向において第一固定レール210と第一移動レール220とに挟まれており、かつ、第一移動レール220がX軸方向に移動する。この場合、接触角αは、第一転動体251の中心を通るZ軸に平行な直線と、当該中心と接触点とを結ぶ直線とのなす角であり、本実施の形態では、接触角αは例えば45°である。従って、可動体130と接続される第一移動レール220に、車両の幅方向(Y軸方向)及び車両の上下方向(Z軸方向)のいずれの方向の外力が付与された場合であっても、第一レール機構200は、当該外力に抗して、第一移動レール220の移動を抑制できる。
これに対し、実施の形態に係る第二レール機構300では、図10に示すように、第二転動体351の、第三軌道面311及び第四軌道面321に対する接触角βは0°である。具体的には、本実施の形態に係る第二レール機構300において、1つの第二転動体351に着目した場合、図10に示すように、第二転動体351は、第三軌道面311と第四軌道面321との間に配置されている。第三軌道面311は、第二固定レール310の内面の一部によって形成されたX軸方向に延在する平面である。第四軌道面321は、第二移動レール320の表面の一部によって形成されたX軸方向に延在する平面である。この場合、軌道面の延在方向(X軸方向)に直交する断面において、第三軌道面311及び第四軌道面321のそれぞれは、球体である第二転動体351と1点で接触している。本実施の形態では、第二転動体351は、Z軸方向において第二固定レール310と第二移動レール320とに挟まれており、かつ、第二移動レール320がX軸方向に移動する。この場合、第二転動体351の第三軌道面311及び第四軌道面321との接触角βは、第二転動体351の中心を通るZ軸に平行な直線と、当該中心と接触点とを結ぶ直線とのなす角である。つまり、本実施の形態では、接触角βは0°である。従って、可動体130と接続される第二移動レール320に、車両の上下方向(Z軸方向)の方向の外力が付与された場合、第二レール機構300は、当該外力に抗して、第二移動レール320の上下方向の移動を抑制できる。その一方で、第二移動レール320に、車両の幅方向(Y軸方向)の方向の外力が付与された場合、第二レール機構300は、第二移動レール320の所定範囲内での車両の幅方向の移動を許容する。しかし、本実施の形態では、可動体130は、第一レール機構200にも接続されているため、上述のように、第一レール機構200は車両の幅方向の外力に抗することができる。つまり、可動体130の車両の幅方向の移動は、主として第一レール機構200によって規制される。
また、本実施の形態では、ともにX軸方向に伸縮する2つのレール機構(200、300)を平行に配置して、これら2つのレール機構(200、300)に可動体130を取り付けて、可動体130を出退させる構造が採用されている。従って、例えば、2つのレール機構(200、300)が厳密に平行に配置されていない場合、2つのレール機構(200、300)におけるスライド荷重(スライド時の機械的な抵抗)が大きくなる。これにより、可動体130の、通常位置と格納位置との間の移動がスムーズに行えない可能性がある。しかしながら、本実施の形態では、第二レール機構300は、上述のように、第二移動レール320について、車両の幅方向への移動(変位)を許容する構造を有している。従って、例えば上下方向から見た場合に、2つのレール機構(200、300)が厳密には平行でない場合であっても、第二移動レール320が車両の幅方向への変位が可能であるため、2つのレール機構(200、300)のスライド荷重の増加が抑制される。その結果、可動体130の、通常位置と格納位置との間の移動がスムーズに実行される。さらに、例えば、第一レール機構200と第二レール機構300とを平行に配置することに関して厳密さが要求されないため、第一レール機構200及び第二レール機構300の、ブラケット500への取付作業が効率化される。その結果、ステアリング装置100の製造効率の向上または製造コストの抑制が図られる。
また、本実施の形態において、第一レール機構200は、2つの第一転動体列250を有し、第二レール機構300は、3以上の第二転動体列350を有する。
このように、本実施の形態では、第一レール機構200において、第一移動レール220を第一固定レール210に対して円滑にスライドさせる第一転動体列250の数は2である。そのため、例えば、第一転動体列250の数が3列以上の場合に生じやすいピッチエラー(軌道列間隔のずれ)が発生し難いので、複数の第一転動体列250それぞれの位置ずれの影響が重なることによる、第一レール機構200の伸縮動作の不具合が発生し難い。第二レール機構300については、第二移動レール320を第二固定レール310に対して円滑にスライドさせる第二転動体列350の数は3以上(本実施の形態では4)である。これにより、コラム部120が固定された可動体130を吊り下げ状に(上方から)支持する第二レール機構300の耐荷重性が向上する。このことは、可動体130に支持された操舵部材110の安定的な支持に有利である。
また、本実施の形態では、車両の幅方向において互いに異なる位置に配置された第一レール機構200及び第二レール機構300は、例えば図5及び図6に示すように、互いに離間して配置されている。
この構成によれば、ステアリング装置100を後方(X軸プラス方向)から見た場合、第一レール機構200と第二レール機構300との間に、これらが離間していることで生じる空間が存在する。この空間には、例えば、図6に示すように、操舵部材110における運転者が把持する部分である把持部110bが収容される。つまり、第一レール機構200と第二レール機構300との間の空間を、操舵部材110の収容領域として利用することができる。これにより、操舵部材110を、ブラケット500の下方の所定の位置(図5参照)まで移動させることができる。このことは、運転者が操舵部材110を使用していない場合に、操舵部材110を運転者からできるだけ遠くに収容する(運転者の前方空間をできるだけ大きく確保する)、という観点から有利である。第一レール機構200と第二レール機構300との間の空間に収容される部材は操舵部材110には限られず、コラム部120が備えるウインカーレバー等(図示せず)が当該空間に収容されてもよい。
本実施の形態では、図6に示すように、第二レール機構300は、上下方向において軸部材121よりも上の位置であって、かつ、軸部材121の直上ではない位置に配置されている。
この構成によれば、軸部材121の直上であって、車両の幅方向における第二レール機構300の側方に位置する空間を、操舵部材110及びコラム部120の収容領域として利用できる。例えば、図6に示すように、操舵部材110の、軸部材121と接続される部分であるハブ部110aが比較的に大きい場合を想定する。この場合であっても、軸部材121の直上には第二レール機構300が配置されていないため、可動体130を、格納位置まで移動させる際に、ハブ部110aと第二レール機構300とを干渉させないことができる。軸部材121の直上の空間に収容される部材は、操舵部材110には限られず、コラム部120が備えるウインカーレバー等(図示せず)が当該空間に収容されてもよい。
[4.変形例]
以上、本発明に係るステアリング装置について、実施の形態に基づいて説明した。しかしながら、本発明は、上記実施の形態限定されるものではない。本発明の趣旨を逸脱しない限り、当業者が思いつく各種変形を上記実施の形態に施したもの、あるいは、上記説明された複数の構成要素を組み合わせて構築される形態も本発明の範囲内に含まれる。
以上、本発明に係るステアリング装置について、実施の形態に基づいて説明した。しかしながら、本発明は、上記実施の形態限定されるものではない。本発明の趣旨を逸脱しない限り、当業者が思いつく各種変形を上記実施の形態に施したもの、あるいは、上記説明された複数の構成要素を組み合わせて構築される形態も本発明の範囲内に含まれる。
例えば、第一レール機構200及び第二レール機構300のそれぞれが有する転動体列の数は1以上であればよい。つまり、第一レール機構200は、少なくとも1つの第一転動体列250を有していれば、第一移動レール220を第一固定レール210に対してスライドさせることができる。第二レール機構300も同様に、少なくとも1つの第二転動体列350を有していれば、第二移動レール320を第二固定レール310に対してスライドさせることができる。例えば、第二レール機構300は、第二固定レール310の内面と第二移動レール320の上面との間に、第二転動体列350を1つのみ有してもよい。つまり、第二レール機構300における第二転動体列350の数は3でもよい。この場合、第二移動レール320の上面に沿って配置される第二転動体列350は、第二固定レール310及び第二移動レール320のY軸方向における中央部に配置することが、第二移動レール320の安定的なスライド動作の実現の観点から好ましい。第一レール機構200及び第二レール機構300が有する転動体列の数は、例えば、第一レール機構200及び第二レール機構300に要求される仕様(必要な伸縮長さ、支持すべき部材(可動体130及びコラム部120等)の重量またはサイズなど)に応じて適宜決定されてもよい。
第一レール機構200において、第一転動体251の軌道面との接触点の数は、第二レール機構300と同じく、2であってもよい。例えば、第二レール機構300と同じ構造のレール機構を、その厚み方向(固定レールと移動レールとの並び方向)が、車両の幅方向(Y軸方向)に向く姿勢で、第一レール機構200の位置に配置してもよい。この場合、当該レール機構において、移動レールは、構造上、車両の上下方向への移動(変位)が許容される。しかし、当該レール機構は、第二レール機構300と同じく、車両の上下方向の外力に抗することができるため、可動体130の車両の上下方向の移動は、主として、当該レール機構によって規制される。
第一転動体251及び第二転動体351は、ベアリング用ボールとは異なる種類の転動体であってもよい。第一転動体251及び第二転動体351の少なくとも一方として、例えばベアリング用ローラが採用されてもよい。第一転動体251及び第二転動体351を形成する材料は金属には限定されない。第一転動体251及び第二転動体351の少なくとも一方が、例えば樹脂によって形成されてもよい。
ステアリング装置100が備えるレール機構は、第一レール機構200及び第二レール機構300のみである必要はない。例えば、図6における可動体130の右側に、可動体130に接続された第三レール機構が配置されてもよい。この場合、第三レール機構は、ブラケット500若しくは他の部材を介して車両に固定されてもよく、または、車両に直接的に固定されてもよい。すなわち、ステアリング装置100は、可動体130を前後方向に移動可能に支持するレール機構として、少なくとも、第一レール機構200及び第二レール機構300を備えればよい。例えば可動体130及びコラム部120のサイズまたは重量が比較的に大きい場合に、ステアリング装置100に、更にレール機構が備えられてもよい。
第一レール機構200及び第二レール機構300は、固定レール及び移動レールの間に配置され、かつ、固定レール及び移動レールのそれぞれとスライド可能に配置された中間レールを有してもよい。これにより、第一レール機構200及び第二レール機構300の伸縮可能長さが増加する。
第一レール機構200及び第二レール機構300は、車両の幅方向(Y軸方向)で離間していなくてもよい。つまり、第一レール機構200及び第二レール機構300は車両の幅方向で接触して配置されてもよい。例えば、可動体130及びコラム部120の、車両の幅方向のサイズに応じて、車両の幅方向における第一レール機構200と第二レール機構300との間の距離が決定されてもよい。
ステアリング装置100はさらに、ステアリング装置100の上下方向の傾きを変化させるチルト機構部を備えてもよい。チルト機構部は、例えば、ブラケット500の上下方向の傾きを変化させる。これにより、操舵部材110の上下方向の位置を、運転者の意図に応じて調整することができる。
駆動装置140は、送りねじ方式とは異なる方式によって可動体130の移動を駆動してもよい。駆動装置140は、例えば、可動体130に固定された棒体の伸縮または前後方向の移動によって可動体130の前後方向の移動を駆動してもよい。さらに、ステアリング装置100は、駆動装置140を備えなくてもよい。例えば、運転者の手動によって、操舵部材110の出退、つまり、可動体130の通常位置と格納位置との間の移動が実行されてもよい。この場合であっても、本実施の形態に係るステアリング装置100によれば、操舵部材110が安定して支持された状態で、操舵部材110の出退が実行される。
可動体130は、コラム部120と別体である必要はない。例えば、コラム部120が備える反力発生装置125が台座を有する場合、その台座が、第一レール機構200及び第二レール機構300にガイドされながら前後方向に移動する可動体130として機能してもよい。
本発明は、運転者の前方空間を広げることができるステアリング装置として有用である。従って、手動運転が可能であり、かつ自動運転が可能な乗用車、バス、トラック、農機、建機など、車輪または無限軌道面などを備えた車両に利用可能である。
10:ステアリングシステム、100:ステアリング装置、102:転舵機構部、110:操舵部材、110a:ハブ部、110b:把持部、120:コラム部、121:軸部材、125:反力発生装置、126:軸支持部、127:反力モータ、130:可動体、131:本体部、134:ナット部、140:駆動装置、141:移動用アクチュエータ、142:伝達機構部、145:送りねじ、200:第一レール機構、210:第一固定レール、211:第一軌道面、215,216:第一固定ストッパ、220:第一移動レール、221:第二軌道面、225,226:第一移動ストッパ、230,330:リテーナ、231a:第一転動体用ポケット、231b:スペーサ用ポケット、250:第一転動体列、251:第一転動体、251a,351a:スペーサ、300:第二レール機構、310:第二固定レール、311:第三軌道面、315,316:第二固定ストッパ、320:第二移動レール、321:第四軌道面、325,326:第二移動ストッパ、331:第二転動体用ポケット、350:第二転動体列、351:第二転動体、500:ブラケット、510:取付部材、520:軸支持部材、710:転舵輪、711:タイロッド、730:軸体、750:転舵用アクチュエータ
Claims (7)
- 車両の操舵を行うためのステアリング装置であって、
操舵部材が取り付けられる操舵入力軸と、
前記操舵入力軸を回転可能に支持する可動体と、
前記可動体の、前記車両の前後方向への移動をガイドする第一レール機構及び第二レール機構であって、前記車両の幅方向において互いに異なる位置に配置された第一レール機構及び第二レール機構と、を備え、
前記第一レール機構は、前記車両の幅方向において、前記操舵入力軸とは異なる位置に配置されており、
前記第二レール機構は、前記車両の上下方向において、前記操舵入力軸よりも上の位置に配置されている、
ステアリング装置。 - 前記第一レール機構は、
前記車両に固定され、複列の第一軌道面を有する第一固定レールと、
前記第一固定レールに対してスライド可能に取り付けられ、複列の第二軌道面を有する第一移動レールと、
前記複列の第一軌道面と前記複列の第二軌道面との間に配置された複数の第一転動体列であって、それぞれが、転動自在な複数の第一転動体を含む複数の第一転動体列と、を有し、
前記第二レール機構は、
前記車両に固定され、複列の第三軌道面を有する第二固定レールと、
前記第二固定レールに対してスライド可能に取り付けられ、複列の第四軌道面を有する第二移動レールと、
前記複列の第三軌道面と前記複列の第四軌道面との間に配置された複数の第二転動体列であって、それぞれが、転動自在な複数の第二転動体を含む複数の第二転動体列と、を有する、
請求項1記載のステアリング装置。 - 前記複数の第一転動体それぞれの、前記第一軌道面及び前記第二軌道面に対する接触角と、
前記複数の第二転動体それぞれの、前記第三軌道面及び前記第四軌道面に対する接触角とは、互いに異なる、
請求項2記載のステアリング装置。 - 前記複数の第一転動体のそれぞれの、前記第一軌道面及び前記第二軌道面に対する接触点の合計数は3以上である、
請求項2または3記載のステアリング装置。 - 前記第一レール機構は、前記複数の第一転動体列である、2つの第一転動体列を有し、
前記第二レール機構は、前記複数の第二転動体列である、3以上の第二転動体列を有する、
請求項2~4のいずれか一項に記載のステアリング装置。 - 前記第一レール機構と、前記第二レール機構とは、互いに離間して配置されている、
請求項1~5のいずれか一項に記載のステアリング装置。 - 前記第二レール機構は、前記上下方向において前記操舵入力軸よりも上の位置であって、かつ、前記操舵入力軸の直上ではない位置に配置されている、
請求項1~6のいずれか一項に記載のステアリング装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/047030 WO2023119365A1 (ja) | 2021-12-20 | 2021-12-20 | ステアリング装置 |
| PCT/JP2022/030735 WO2023119719A1 (ja) | 2021-12-20 | 2022-08-12 | ステアリング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/047030 WO2023119365A1 (ja) | 2021-12-20 | 2021-12-20 | ステアリング装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023119365A1 true WO2023119365A1 (ja) | 2023-06-29 |
Family
ID=86901568
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/047030 WO2023119365A1 (ja) | 2021-12-20 | 2021-12-20 | ステアリング装置 |
| PCT/JP2022/030735 WO2023119719A1 (ja) | 2021-12-20 | 2022-08-12 | ステアリング装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/030735 WO2023119719A1 (ja) | 2021-12-20 | 2022-08-12 | ステアリング装置 |
Country Status (1)
| Country | Link |
|---|---|
| WO (2) | WO2023119365A1 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20190016365A1 (en) * | 2017-07-11 | 2019-01-17 | Nio Usa, Inc. | Body mounted sliding steering column with offset feedback actuator |
| JP2021046001A (ja) * | 2019-09-17 | 2021-03-25 | アイシン精機株式会社 | 車両のステアリング装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2550610B (en) * | 2016-05-25 | 2019-11-20 | Ford Global Tech Llc | A steering wheel assembly |
| GB2579371B (en) * | 2018-11-29 | 2022-08-24 | Zf Automotive Uk Ltd | Steering column assembly |
| DE102019207525A1 (de) * | 2019-05-22 | 2020-11-26 | Thyssenkrupp Ag | Lenksäule für ein Kraftfahrzeug |
-
2021
- 2021-12-20 WO PCT/JP2021/047030 patent/WO2023119365A1/ja unknown
-
2022
- 2022-08-12 WO PCT/JP2022/030735 patent/WO2023119719A1/ja unknown
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20190016365A1 (en) * | 2017-07-11 | 2019-01-17 | Nio Usa, Inc. | Body mounted sliding steering column with offset feedback actuator |
| JP2021046001A (ja) * | 2019-09-17 | 2021-03-25 | アイシン精機株式会社 | 車両のステアリング装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2023119719A1 (ja) | 2023-06-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6540243B2 (en) | Front wheel steering system for automotive three- and four-wheeled vehicles | |
| KR102288888B1 (ko) | 주행 모드 변경이 가능한 소형 모빌리티 | |
| EP2011718B1 (en) | Vehicle steering column | |
| JP2007182213A (ja) | ステアリング装置 | |
| WO2013094105A1 (ja) | ステアリング装置 | |
| CN111094114B (zh) | 带有辅助转向功能的轮毂单元和具有它的车辆 | |
| JP2012121391A (ja) | ステアリング装置 | |
| WO2023119365A1 (ja) | ステアリング装置 | |
| WO2018235891A1 (ja) | 補助転舵機能付ハブユニットおよび車両 | |
| JP2020100399A (ja) | 転舵軸付ハブベアリングおよびこれを備えた車両 | |
| CN116476628A (zh) | 用于车辆的角模块装置 | |
| KR20230167949A (ko) | 차량용 코너 모듈 장치 | |
| JP5181941B2 (ja) | 車両 | |
| WO2023119744A1 (ja) | ステアリング装置 | |
| WO2023148855A1 (ja) | ステアリング装置 | |
| JP2003104198A (ja) | 軌道車両の案内装置 | |
| JP4583834B2 (ja) | 全方向移動車 | |
| JP2019006227A (ja) | 補助転舵機能付ハブユニットおよび車両 | |
| WO2020080436A1 (ja) | ステアバイワイヤシステムの操舵部 | |
| JP2022038419A (ja) | 補助輪 | |
| JP2012017042A (ja) | 操舵角切替制御装置 | |
| JP6899464B2 (ja) | 転舵軸付ハブベアリングおよびこれを備えた車両 | |
| JP5119796B2 (ja) | ステアリングコラム装置 | |
| JP7282591B2 (ja) | ステアリング装置 | |
| JP2022191707A (ja) | ステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21968803 Country of ref document: EP Kind code of ref document: A1 |