WO2022254545A1 - 媒体搬送装置、制御方法及び制御プログラム - Google Patents
媒体搬送装置、制御方法及び制御プログラム Download PDFInfo
- Publication number
- WO2022254545A1 WO2022254545A1 PCT/JP2021/020730 JP2021020730W WO2022254545A1 WO 2022254545 A1 WO2022254545 A1 WO 2022254545A1 JP 2021020730 W JP2021020730 W JP 2021020730W WO 2022254545 A1 WO2022254545 A1 WO 2022254545A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- medium
- roller
- speed
- feeding
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images


































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H7/00—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles
- B65H7/18—Modifying or stopping actuation of separators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H3/00—Separating articles from piles
- B65H3/02—Separating articles from piles using friction forces between articles and separator
- B65H3/06—Rollers or like rotary separators
- B65H3/063—Rollers or like rotary separators separating from the bottom of pile
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H3/00—Separating articles from piles
- B65H3/02—Separating articles from piles using friction forces between articles and separator
- B65H3/06—Rollers or like rotary separators
- B65H3/0669—Driving devices therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H3/00—Separating articles from piles
- B65H3/46—Supplementary devices or measures to assist separation or prevent double feed
- B65H3/52—Friction retainers acting on under or rear side of article being separated
- B65H3/5246—Driven retainers, i.e. the motion thereof being provided by a dedicated drive
- B65H3/5276—Driven retainers, i.e. the motion thereof being provided by a dedicated drive the retainers positioned over articles separated from the bottom of the pile
- B65H3/5284—Retainers of the roller type, e.g. rollers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H7/00—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles
- B65H7/02—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles by feelers or detectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H7/00—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles
- B65H7/02—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles by feelers or detectors
- B65H7/14—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles by feelers or detectors by photoelectric feelers or detectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H99/00—Subject matter not provided for in other groups of this subclass
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2511/00—Dimensions; Position; Numbers; Identification; Occurrences
- B65H2511/10—Size; Dimensions
- B65H2511/11—Length
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2511/00—Dimensions; Position; Numbers; Identification; Occurrences
- B65H2511/20—Location in space
- B65H2511/22—Distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2511/00—Dimensions; Position; Numbers; Identification; Occurrences
- B65H2511/50—Occurence
- B65H2511/51—Presence
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2513/00—Dynamic entities; Timing aspects
- B65H2513/10—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2513/00—Dynamic entities; Timing aspects
- B65H2513/50—Timing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2513/00—Dynamic entities; Timing aspects
- B65H2513/50—Timing
- B65H2513/512—Starting; Stopping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2801/00—Application field
- B65H2801/03—Image reproduction devices
- B65H2801/06—Office-type machines, e.g. photocopiers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2801/00—Application field
- B65H2801/39—Scanning
Definitions
- the present disclosure relates to a medium conveying device, control method and control program, and more particularly to a medium conveying device, control method and control program for separating and sequentially feeding media.
- the medium conveying device may not be able to feed the medium when there is insufficient free space in the storage device for storing the captured image of the medium, or when the distance between the mediums that are continuously fed is short. must be stopped at once. In such a case, the medium conveying device is required to appropriately control the stop and restart of medium feeding.
- a sheet feeding apparatus that controls a feed roller to a low speed when the feed roller starts feeding a succeeding sheet after a post-registration sensor detects the arrival of the trailing edge of the preceding sheet.
- This sheet feeding device controls the feeding roller at high speed when the leading edge of the succeeding sheet has passed the nip position between the feeding roller and the separation roller.
- the purpose of the medium transport device, control method, and control program is to enable better control of medium feeding.
- a medium conveying device includes a mounting table on which a medium is mounted, a feeding roller that separates and sequentially feeds the medium mounted on the mounting table, and a medium that is fed by the feeding roller.
- a conveying roller that conveys a medium, a sensor that is arranged between the feeding rollers and detects the medium, a motor that drives the feeding roller, and the first medium among the media placed on the mounting table.
- the motor is controlled so that the feed roller rotates at a constant speed during the separation period from when the feed roller starts feeding the medium until the sensor detects the leading edge of the medium.
- a control unit for controlling the motor to rotate the feeding roller at a first speed and then at a second speed higher than the first speed when feeding the second and subsequent media.
- a control method is a control method of a medium conveying device, in which a medium placed on a mounting table is separated and sequentially fed by a feeding roller, and the medium is fed by the feeding roller.
- the medium fed by the feeding roller is transported, the medium is detected by the sensor arranged between the feeding rollers, the feeding roller is driven by the motor, and the medium placed on the mounting table
- the feed roller rotates at a constant speed during the separation period from when the feed roller starts feeding the medium until the sensor detects the leading edge of the medium.
- the motor is controlled to rotate the feeding roller at a first speed and then at a second speed higher than the first speed.
- a control program includes a mounting table on which a medium is mounted, a feeding roller that separates and sequentially feeds the medium mounted on the mounting table, and a medium that is fed by the feeding roller.
- the medium transport device, control method, and control program can better control the feeding of the medium.
- FIG. 1 is a perspective view showing a medium conveying device 100 according to an embodiment
- FIG. 4 is a diagram for explaining a transport path inside the medium transport device 100
- FIG. FIG. 3 is a schematic diagram for explaining a drive source
- FIG. 11 is a schematic diagram for explaining the third medium sensor 116 and the like
- FIG. 11 is a schematic diagram for explaining the third medium sensor 116 and the like
- 1 is a block diagram showing a schematic configuration of a medium conveying device 100
- FIG. 2 is a diagram showing a schematic configuration of a storage device 140 and a processing circuit 150
- FIG. 7 is a flow chart showing an example of the operation of medium reading processing; 7 is a flow chart showing an example of the operation of medium reading processing; 7 is a graph for explaining changes in roller speed; 7 is a graph for explaining changes in roller speed; 7 is a graph for explaining changes in roller speed; (a), (b) is a schematic diagram for demonstrating a technical significance. It is a schematic diagram for demonstrating a technical significance.
- FIG. 4 is a schematic diagram for explaining another drive source;
- FIG. 11 is a flow chart showing an example of part of the operation of another medium reading process;
- FIG. 7 is a graph for explaining changes in roller speed;
- FIG. 11 is a flow chart showing an example of part of the operation of still another medium reading process;
- FIG. 7 is a graph for explaining changes in roller speed;
- FIG. 11 is a flow chart showing an example of the operation of still another medium reading process; FIG. FIG. 11 is a flow chart showing an example of the operation of still another medium reading process; FIG. 7 is a graph for explaining changes in roller speed; FIG. 9 is a schematic diagram for explaining still another drive source; FIG. 11 is a flow chart showing an example of the operation of still another medium reading process; FIG. 7 is a graph for explaining changes in roller speed; FIG. 9 is a schematic diagram for explaining still another drive source; FIG. 9 is a schematic diagram for explaining still another drive source; FIG. 11 is a flow chart showing an example of part of the operation of still another medium reading process; FIG.
- FIG. 7 is a graph for explaining changes in roller speed;
- FIG. 9 is a schematic diagram for explaining still another drive source;
- FIG. 11 is a flow chart showing an example of part of the operation of still another medium reading process;
- FIG. 7 is a graph for explaining changes in roller speed;
- FIG. 11 is a flow chart showing an example of the operation of still another medium reading process;
- FIG. 11 is a flow chart showing an example of the operation of still another medium reading process;
- FIG. 7 is a graph for explaining changes in roller speed;
- 3 is a diagram showing a schematic configuration of another processing circuit 250;
- FIG. 1 is a perspective view showing a medium conveying device 100 configured as an image scanner.
- the medium conveying device 100 conveys a medium, which is an original, and captures an image.
- the medium may be paper, cardboard, card, booklet, passport, or the like.
- the media transport device 100 may be a facsimile machine, a copier, a multifunction peripheral (MFP), or the like.
- MFP multifunction peripheral
- the medium to be conveyed may be an object to be printed instead of a document, and the medium conveying device 100 may be a printer or the like.
- the medium transport device 100 includes a lower housing 101, an upper housing 102, a mounting table 103, a discharge table 104, an operation device 105, a display device 106, and the like.
- the upper housing 102 is arranged to cover the upper surface of the medium transporting device 100, and is engaged with the lower housing 101 by a hinge so that it can be opened and closed when the medium is clogged, when cleaning the inside of the medium transporting device 100, or the like.
- the mounting table 103 engages with the lower housing 101 and mounts a medium to be fed and transported.
- the ejection table 104 engages with the upper housing 102 and places the ejected medium. Note that the discharge table 104 may be engaged with the lower housing 101 .
- the operation device 105 has an input device such as a button and an interface circuit that acquires signals from the input device, receives an input operation by the user, and outputs an operation signal according to the user's input operation.
- the display device 106 has a display including liquid crystal, organic EL (Electro-Luminescence), etc. and an interface circuit for outputting image data to the display, and displays the image data on the display.
- FIG. 2 is a diagram for explaining the transport path inside the medium transport device 100.
- FIG. 2 is a diagram for explaining the transport path inside the medium transport device 100.
- the transport path inside the medium transport device 100 includes a first medium sensor 111, a feed roller 112, a brake roller 113, a second medium sensor 114, an ultrasonic sensor 115, a third medium sensor 116, a fourth medium sensor 117, a fifth It has a medium sensor 118, a conveying roller 119, a first facing roller 120, a sixth medium sensor 121, an imaging device 122, a discharge roller 123, a second facing roller 124, and the like.
- each of the feeding roller 112, the brake roller 113, the conveying roller 119, the first facing roller 120, the discharging roller 123 and/or the second facing roller 124 is not limited to one, and may be plural.
- the plurality of feeding rollers 112, brake rollers 113, conveying rollers 119, first opposing rollers 120, discharge rollers 123 and/or second opposing rollers 124 are spaced apart in the width direction orthogonal to the medium transport direction A1. Arranged side by side with space.
- the upper surface of the lower housing 101 forms the lower guide 101a of the medium transport path
- the lower surface of the upper housing 102 forms the upper guide 102a of the medium transport path.
- Arrow A1 in FIG. 2 indicates the direction of medium transport.
- upstream refers to upstream in the medium transport direction A1
- downstream refers to downstream in the medium transport direction A1.
- the first medium sensor 111 is arranged upstream from the feed roller 112 and the brake roller 113 .
- the first medium sensor 111 has a contact detection sensor and detects whether or not a medium is mounted on the mounting table 103 .
- the first medium sensor 111 generates and outputs a first medium signal whose signal value changes depending on whether or not the medium is mounted on the mounting table 103 .
- the first medium sensor 111 is not limited to a contact detection sensor, and any other sensor capable of detecting the presence or absence of a medium, such as a light detection sensor, may be used as the first medium sensor 111 .
- the feeding roller 112 is provided in the lower housing 101, and separates and feeds the medium placed on the placing table 103 in order from the bottom.
- the brake roller 113 is provided in the upper housing 102, arranged to face the feed roller 112, and rotates in the direction opposite to the medium feed direction. Note that the feeding roller 112 is provided in the upper housing 102 and the brake roller 113 is provided in the lower housing 101, and the feeding roller 112 feeds the medium placed on the mounting table 103 in order from the top. good.
- the second medium sensor 114 is an example of a second sensor, is arranged downstream from the feed roller 112 and upstream from the transport roller 119, and detects the medium transported to that position.
- the second media sensor 114 is positioned near the nip area between the feed roller 112 and the brake roller 113, between the feed roller 112 and the fifth media sensor 118 in the media transport direction A1.
- the second medium sensor 114 includes a light emitter and a light receiver provided on one side with respect to the medium transport path, and a light guide tube provided at a position facing the light emitter and the light receiver across the medium transport path.
- the light emitter is an LED (Light Emitting Diode) or the like, and emits light toward the medium transport path.
- the light receiver is a photodiode or the like, and receives light emitted by the light emitter and guided by the light guide tube.
- the light emitted from the light emitter is blocked by the medium, so the light receiver does not detect the light emitted from the light emitter.
- the second medium sensor 114 generates a second medium signal whose signal value changes depending on whether or not the medium is present at the position of the second medium sensor 114 based on the intensity of the light received by the light receiver. output.
- the ultrasonic sensor 115 is arranged downstream from the feed roller 112 and upstream from the transport roller 119 .
- the ultrasonic sensor 115 includes an ultrasonic transmitter 115a and an ultrasonic receiver 115b.
- the ultrasonic transmitter 115a and the ultrasonic receiver 115b are arranged in the vicinity of the transport path of the medium so as to face each other with the transport path interposed therebetween.
- the ultrasonic transmitter 115a transmits ultrasonic waves.
- the ultrasonic receiver 115b receives ultrasonic waves transmitted by the ultrasonic transmitter 115a and transmitted through a medium, and generates and outputs ultrasonic signals, which are electrical signals corresponding to the received ultrasonic waves.
- the medium transport device 100 can detect double feeding of the medium based on the ultrasonic signal. Ultrasonic waves passing through a medium are also attenuated by the medium itself. Therefore, the media transport device 100 can detect the thickness of the transported media based on the ultrasonic signal.
- the fifth medium sensor 118 is an example of a sensor, is arranged downstream from the feed roller 112 and upstream from the transport roller 119, and detects the medium transported to that position. That is, the fifth medium sensor 118 is arranged between the feed roller 112 and the transport roller 119 .
- the fifth medium sensor 118 includes a light emitter and a light receiver provided on one side with respect to the medium transport path, and a light guide tube provided at a position facing the light emitter and the light receiver across the medium transport path. including.
- the light emitter is an LED or the like, and emits light toward the medium transport path.
- the light receiver is a photodiode or the like, and receives light emitted by the light emitter and guided by the light guide tube.
- the fifth medium sensor 118 generates a fifth medium signal whose signal value changes depending on whether the medium is present at the position of the fifth medium sensor 118 or not, based on the intensity of the light received by the light receiver. output.
- the conveying roller 119 and the first opposing roller 120 are arranged facing each other on the downstream side of the feeding roller 112 and convey the medium fed by the feeding roller 112 and the brake roller 113 to the imaging device 122 .
- the conveying roller 119 is provided in the upper housing 102
- the first opposing roller 120 is provided in the lower housing 101 below the conveying roller 119 .
- the sixth medium sensor 121 is arranged downstream from the conveying roller 119 and upstream from the imaging device 122, and detects the medium conveyed to that position.
- the sixth medium sensor 121 includes a light emitter and a light receiver provided on one side with respect to the medium transport path, and a light guide tube provided at a position facing the light emitter and the light receiver across the medium transport path. including.
- the light emitter is an LED or the like, and emits light toward the medium transport path.
- the light receiver is a photodiode or the like, and receives light emitted by the light emitter and guided by the light guide tube.
- the sixth medium sensor 121 generates a sixth medium signal whose signal value changes depending on whether or not the medium is present at the position of the sixth medium sensor 121, based on the intensity of the light received by the light receiver. output.
- the imaging device 122 is an example of an imaging unit, is arranged downstream of the transport roller 119 , and captures an image of the medium transported by the transport roller 119 .
- the image pickup device 122 includes a first image pickup device 122a and a second image pickup device 122b arranged to face each other across the medium transport path.
- the first imaging device 122a has a linear optical system type CIS (Contact Image Sensor) line sensor having CMOS (Complementary Metal Oxide Semiconductor) imaging elements linearly arranged in the main scanning direction. Also, the first imaging device 122a has a lens that forms an image on the imaging element, and an A/D converter that amplifies an electrical signal output from the imaging element and performs analog/digital (A/D) conversion.
- the first imaging device 122a captures an image of the surface of the medium being conveyed, generates an input image, and outputs the input image, under control from a processing circuit to be described later.
- the second imaging device 122b has a CIS line sensor of the same magnification optical system type having CMOS imaging elements linearly arranged in the main scanning direction. Also, the second imaging device 122b has a lens that forms an image on the imaging device, and an A/D converter that amplifies the electrical signal output from the imaging device and performs analog/digital (A/D) conversion.
- the second image capturing device 122b captures an image of the back surface of the medium being conveyed, generates an input image, and outputs the input image, under the control of a processing circuit, which will be described later.
- the medium conveying device 100 may have only one of the first imaging device 122a and the second imaging device 122b and read only one side of the medium.
- a line sensor of the same magnification optical system type CIS provided with the CMOS imaging device a line sensor of the same magnification optical system type CIS provided with the CCD (Charge Coupled Device) imaging device may be used.
- a reduction optics type line sensor having a CMOS or CCD imaging device may be used.
- the ejection roller 123 and the second opposing roller 124 are arranged downstream of the imaging device 122 and face each other, and eject the medium that is transported by the transport roller 119 and the first opposing roller 120 and imaged by the imaging device 122. Discharge onto platform 104 .
- the discharge roller 123 is provided in the upper housing 102
- the second opposing roller 124 is provided in the lower housing 101 below the discharge roller 123 .
- the medium placed on the mounting table 103 moves between the lower guide 101a and the upper guide 102a in the medium conveying direction A1 by rotating the feeding roller 112 in the direction of the arrow A2 in FIG. 2, that is, in the medium feeding direction. transported towards.
- the brake roller 113 rotates in the direction of arrow A3, that is, in the opposite direction to the medium feeding direction, when the medium is conveyed.
- the medium is fed between the conveying roller 119 and the first opposing roller 120 while being guided by the lower guide 101a and the upper guide 102a.
- the medium is fed between the first imaging device 122a and the second imaging device 122b by rotating the transport roller 119 and the first opposed roller 120 in the directions of arrows A4 and A5, respectively.
- the medium read by the imaging device 122 is ejected onto the ejection table 104 by rotating the ejection roller 123 and the second opposing roller 124 in the directions of arrows A6 and A7, respectively.
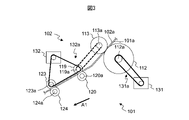
- FIG. 3 is a schematic diagram for explaining drive sources for the feeding roller 112, the brake roller 113, the conveying roller 119, the first opposed roller 120, the discharge roller 123 and/or the second opposed roller .
- the medium conveying device 100 has a first motor 131 and a second motor 132 as drive sources for the rollers.
- the first motor 131 is an example of a motor, is provided in the lower housing 101, is connected to the feed roller 112 via the first transmission mechanism 131a, and drives the feed roller 112.
- the first motor 131 generates driving force for driving the feeding roller 112 according to a control signal from the processing circuit.
- the first transmission mechanism 131a includes one or more pulleys, belts, gears, etc. provided between the first motor 131 and the shaft 112a of the feeding roller 112, and the driving force generated by the first motor 131. is transmitted to the feeding roller 112 .
- the first motor 131 rotates the feeding roller 112 to feed the medium.
- the second motor 132 is provided in the upper housing 102 separately from the first motor 131, and is connected to the transport roller 119, the discharge roller 123, and the brake roller 113 via the second transmission mechanism 132a. It drives the roller 123 and the brake roller 113 .
- the second motor 132 generates driving force for driving the conveying roller 119, the discharge roller 123 and the brake roller 113 according to the control signal from the processing circuit.
- the second transmission mechanism 132a includes one or more pulleys, belts, gears, etc. provided between the second motor 132 and the shaft 119a of the transport roller 119, the shaft 123a of the discharge roller 123, and the shaft 113a of the brake roller 113. including.
- the second transmission mechanism 132 a transmits the driving force generated by the second motor 132 to the conveying roller 119 , the discharge roller 123 and the brake roller 113 .
- the second motor 132 rotates the transport roller 119 , the discharge roller 123 and the brake roller 113 to feed, convey and discharge the medium to the transport roller 119 , the discharge roller 123 and the brake roller 113 .
- the second motor 132 is an example of a drive source for the brake roller 113 .
- the first facing roller 120 is a driven roller driven to rotate by the transport roller 119
- the second facing roller 124 is a driven roller to rotate driven by the discharge roller 123
- the first facing roller 120 and/or the second facing roller 124 may be provided so as to be driven by the driving force from the second motor 132 .
- one or more gears are provided between the shaft 119a of the transport roller 119 and the shaft 120a of the first opposing roller 120 and/or between the shaft 123a of the discharge roller 123 and the shaft 124a of the second opposing roller 124.
- the second transmission mechanism 132 a further transmits the driving force generated by the second motor 132 to the first facing roller 120 and/or the second facing roller 124 .
- FIG. 4 and 5 are schematic diagrams for explaining the third medium sensor 116 and the fourth medium sensor 117.
- FIG. 4 is a schematic diagram of the lower guide 101a of the lower housing 101 viewed from above
- FIG. 5 is a schematic diagram of the upper guide 102a of the upper housing 102 viewed from below.
- the third medium sensor 116 and the fourth medium sensor 117 are arranged downstream from the feed roller 112 and upstream from the transport roller 119, and detect the medium transported to that position. do.
- the third media sensor 116 and the fourth media sensor 117 are arranged between the second media sensor 114 and the fifth media sensor 118 in the media transport direction A1.
- the third medium sensor 116 and the fourth medium sensor 117 may be arranged at substantially the same position as the fifth medium sensor 118 in the medium transport direction A1.
- the third medium sensor 116 and the fourth medium sensor 117 are arranged side by side with an interval in the width direction A8 orthogonal to the medium conveying direction.
- the third medium sensor 116 includes a light emitter and a light receiver provided on one side with respect to the medium transport path, and a light guide tube provided at a position facing the light emitter and the light receiver across the medium transport path.
- the light emitter is an LED or the like, and emits light toward the medium transport path.
- the light receiver is a photodiode or the like, and receives light emitted by the light emitter and guided by the light guide tube.
- the third medium sensor 116 generates a third medium signal whose signal value changes depending on whether or not the medium is present at the position of the third medium sensor 116 based on the intensity of the light received by the light receiver. output.
- the fourth medium sensor 117 includes a light emitter and a light receiver provided on one side with respect to the medium transport path, and a light guide tube provided at a position facing the light emitter and the light receiver across the medium transport path.
- the light emitter is an LED or the like, and emits light toward the medium transport path.
- the light receiver is a photodiode or the like, and receives light emitted by the light emitter and guided by the light guide tube.
- the fourth medium sensor 117 generates a fourth medium signal whose signal value changes depending on whether the medium is present at the position of the fourth medium sensor 117 or not, based on the intensity of the light received by the light receiver. output.
- the second medium sensor 114 In the second medium sensor 114, the third medium sensor 116, the fourth medium sensor 117, the fifth medium sensor 118 and/or the sixth medium sensor 121, a reflecting member such as a mirror is used instead of the light guide tube. may In addition, in the second medium sensor 114, the third medium sensor 116, the fourth medium sensor 117, the fifth medium sensor 118 and/or the sixth medium sensor 121, the light emitter and the light receiver face each other across the medium transport path. may be provided.
- the second medium sensor 114, the third medium sensor 116, the fourth medium sensor 117, the fifth medium sensor 118 and/or the sixth medium sensor 121 are in contact with the medium or The presence of the medium may be detected by a contact detection sensor or the like that causes a predetermined current to flow when there is no medium.
- the medium conveying device 100 has a first electromagnetic clutch 133 .
- the first electromagnetic clutch 133 is an example of a blocking mechanism, and is provided on the shaft 112 a of the feed roller 112 , that is, in the driving force transmission path from the first motor 131 to the feed roller 112 .
- the first electromagnetic clutch 133 is provided so as to cut off the driving force from the first motor 131 to the feeding roller 112 in response to a control signal from the processing circuit.
- the medium conveying device 100 has a second electromagnetic clutch 134 .
- the second electromagnetic clutch 134 is an example of an electromagnetic clutch, and is provided on the shaft 113 a of the brake roller 113 , that is, in the drive force transmission path from the second motor 132 that is the drive source of the brake roller 113 to the brake roller 113 .
- the second electromagnetic clutch 134 is provided so that the magnitude of torque applied to the brake roller 113 can be changed by a control signal from the processing circuit.
- FIG. 6 is a block diagram showing a schematic configuration of the medium conveying device 100. As shown in FIG.
- the medium transport device 100 further includes an interface device 135, a storage device 140, a processing circuit 150, and the like, in addition to the configuration described above.
- the interface device 135 has an interface circuit conforming to a serial bus such as USB, for example, and is electrically connected to an information processing device (not shown) (for example, a personal computer, a mobile information terminal, etc.) to receive an input image and various information. Send and receive.
- an information processing device for example, a personal computer, a mobile information terminal, etc.
- a communication unit having an antenna for transmitting and receiving wireless signals and a wireless communication interface device for transmitting and receiving signals through a wireless communication line according to a predetermined communication protocol may be used.
- the predetermined communication protocol is, for example, a wireless LAN (Local Area Network).
- the communication unit may have a wired communication interface device for transmitting and receiving signals through a wired communication line according to a communication protocol such as a wired LAN.
- the storage device 140 includes memory devices such as RAM (Random Access Memory) and ROM (Read Only Memory), fixed disk devices such as hard disks, or portable storage devices such as flexible disks and optical disks.
- the storage device 140 also stores computer programs, databases, tables, and the like used for various processes of the medium transport device 100 .
- the computer program may be installed in the storage device 140 from a computer-readable portable recording medium using a known setup program or the like.
- the portable recording medium is, for example, a CD-ROM (compact disc read only memory), a DVD-ROM (digital versatile disc read only memory), or the like.
- the processing circuit 150 operates based on a program stored in the storage device 140 in advance.
- the processing circuit is, for example, a CPU (Central Processing Unit).
- a DSP digital signal processor
- LSI large scale integration
- ASIC Application Specific Integrated Circuit
- FPGA Field-Programmable Gate Array
- the processing circuit 150 includes the operation device 105, the display device 106, the first medium sensor 111, the second medium sensor 114, the ultrasonic sensor 115, the third medium sensor 116, the fourth medium sensor 117, the fifth medium sensor 118, the sixth It is connected to the medium sensor 121, the imaging device 122, the first motor 131, the second motor 132, the first electromagnetic clutch 133, the second electromagnetic clutch 134, the interface device 135, the storage device 140, etc., and controls these parts.
- the processing circuit 150 performs driving control of the first motor 131, imaging control of the imaging device 122, etc. based on each medium signal received from each sensor, acquires an input image from the imaging device 122, and obtains an input image from the imaging device 122 via the interface device 135. to the information processing device.
- FIG. 7 is a diagram showing a schematic configuration of the storage device 140 and the processing circuit 150. As shown in FIG.
- the storage device 140 stores a control program 141, a determination program 142, and the like. Each of these programs is a functional module implemented by software running on a processor.
- the processing circuit 150 reads each program stored in the storage device 140 and operates according to each read program. Thereby, the processing circuit 150 functions as a control section 151 and a determination section 152 .
- FIG. 8 and 9 are flowcharts showing an example of the operation of the medium reading process of the medium conveying device 100.
- FIG. 8 and 9 are flowcharts showing an example of the operation of the medium reading process of the medium conveying device 100.
- control unit 151 receives an instruction to read a medium from the operation device 105 or the interface device 135 when a user inputs an instruction to read the medium using the operation device 105 or the information processing device. (step S101).
- control unit 151 acquires the first medium signal from the first medium sensor 111, and determines whether or not the medium is placed on the placing table 103 based on the acquired first medium signal (step S102). If no medium is placed on the placing table 103, the control unit 151 terminates the series of steps.
- the control unit 151 controls the feed roller 112 , the brake roller 113 , the transport roller 119 , the first facing roller 120 , the discharge roller 123 and/or the second facing roller 124 .
- the surface moving speed is the speed at which the surface of each roller that contacts the medium moves. That is, the surface moving speeds of the feeding roller 112, the conveying roller 119, the first opposing roller 120, the discharging roller 123 and/or the second facing roller 124 are the same as the medium conveying speed by the feeding roller 112, the conveying roller 119 and the discharging roller 123.
- Speed The surface moving speed of the brake roller 113 is the speed at which the surface of the brake roller 113 in contact with the medium moves in the direction opposite to the medium feeding direction. Below, the surface movement speed of each roller may be simply referred to as speed.
- the medium transport device 100 also has a high speed mode, a medium speed mode, and a low speed mode as transport modes for transporting the medium.
- the transport mode is set by the user using the operation device 105 or the information processing device before the medium reading process is executed.
- 10 to 12 are graphs for explaining speed changes of the feeding roller 112, the brake roller 113, the conveying roller 119, the first opposed roller 120, the discharge roller 123 and the second opposed roller .
- 10 shows the speed change of each roller in high speed mode
- FIG. 11 shows the speed change of each roller in medium speed mode
- FIG. 12 shows the speed change of each roller in low speed mode.
- graphs G11, G21, and G31 show changes in speed of the feed roller 112
- graphs G12, G22, and G32 show changes in speed of the brake roller 113
- graphs G13, G23, and G33 show changes in speed of the brake roller 113.
- 3 shows the speed change of the conveying roller 119.
- FIG. Since the speeds of the first facing roller 120, the discharge roller 123, and the second facing roller 124 change in the same manner as the speed of the transport roller 119, the change in speed of the transport roller 119 will be described below as a representative example.
- the horizontal axis of each graph G11-G13, G21-G23, G31-G33 indicates time, and the vertical axis indicates speed.
- the graph G14 shows changes in the signal value of the fifth medium sensor 118
- the graph G15 shows changes in the signal value of the sixth medium sensor 121.
- the horizontal axis of each graph G14 and G15 indicates time, and the vertical axis indicates signal value.
- the signal value of the corresponding signal is L when the medium is not present at the position of each sensor
- the signal value of the corresponding signal is H when the medium is present at the position of each sensor.
- time T1 indicates the start of medium feeding.
- the controller 151 controls the speed of the feeding roller 112 at the start of medium feeding. is set as the initial velocity V1.
- the controller 151 sets the speed of the brake roller 113 to the initial speed U1 and the speed of the transport roller 119 to the initial speed W1.
- the initial speed U1 of the brake roller 113 is set to a speed higher than half the initial speed V1 of the feeding roller 112 . Further, the initial speed U1 of the brake roller 113 may be set to a speed lower than the initial speed V1 of the feed roller 112.
- the controller 151 sets the speed of the brake roller 113 to the final speed U3b and the speed of the transport roller 119 to the final speed W3b.
- the final speed U3b of the brake roller 113 is set to a speed lower (slower) than the final speed U3a of the brake roller 113 in the high speed mode, which will be described later.
- the final speed W3b of the transport roller 119 is set to a speed lower than the final speed W3a of the transport roller 119 in the high speed mode, which will be described later.
- the controller 151 sets the speed of the brake roller 113 to the final speed U3c and the speed of the transport roller 119 to the final speed W3c.
- the final speed U3c of the brake roller 113 is set to a speed lower than the final speed U3b of the brake roller 113 in the middle speed mode.
- the final speed W3c of the transport roller 119 is set to a speed lower than the final speed W3c of the transport roller 119 in the medium speed mode.
- control section 151 drives the first motor 131 and the second motor 132 . Accordingly, the control unit 151 rotates the feeding roller 112, the brake roller 113, the conveying roller 119, the first facing roller 120, the discharge roller 123 and/or the second facing roller 124 to feed and convey the medium. (Step S104).
- the control unit 151 controls the first motor 131 and the second motor 132 to rotate each roller at each set speed. As shown in FIGS. 10 to 12, each roller rotates at each set speed after a predetermined through-up period has passed since the start of driving each motor at time T1. In the following, similarly, when the control unit 151 increases the speed of each roller, each roller rotates at the set speed after a predetermined through-up period has passed since the start of driving each motor. do. Similarly, when the control unit 151 reduces the speed of each roller, each roller rotates at the set speed after a predetermined through-down period has elapsed from the start of driving each motor.
- control unit 151 waits until the leading edge of the conveyed medium passes the position of the fifth medium sensor 118 (step S105).
- the control unit 151 periodically acquires the fifth medium signal from the fifth medium sensor 118, and the signal value of the fifth medium signal changes from a value indicating that the medium does not exist to a value indicating that the medium exists. Then, it is determined that the leading edge of the medium has passed the position of the fifth medium sensor 118 .
- control unit 151 changes the speed of the feed roller 112 and the brake roller 113 (step S106).
- time T2 indicates when the signal value of the fifth medium signal changes from L to H, that is, when the leading edge of the medium passes the position of the fifth medium sensor 118.
- FIG. As shown in FIGS. 10 to 12, the speed of the feed roller 112 that changes when the leading edge of the medium passes the position of the fifth medium sensor 118 differs depending on the transport mode.
- the control unit 151 changes the speed of the feeding roller 112 to the final speed V3a.
- the final speed V3a of the feed roller 112 is set higher than the initial speed V1 of the feed roller 112 and less than or equal to the final speed W3a of the transport roller 119, which will be described later.
- the final speed V3a of the feed roller 112 may be set to the same speed as the final speed W3a of the transport roller 119 .
- the controller 151 changes the speed of the feeding roller 112 to the final speed V3b.
- the final speed V3b of the feed roller 112 in the middle speed mode is set higher than the initial speed V1 and lower than the final speed V3a in the high speed mode.
- the controller 151 changes the speed of the feeding roller 112 to the final speed V3c.
- the final speed V3c of the feed roller 112 in the low speed mode is set higher than the initial speed V1 and lower than the final speed V3b in the medium speed mode.
- the controller 151 changes the speed of the brake roller 113 to the final speed U3a and the speed of the transport roller 119 to the final speed W3a.
- the final speed U3a of the brake roller 113 is set to a speed higher than the initial speed U1 of the brake roller 113.
- the final speed W3a of the conveying roller 119 is set to a speed higher than the initial speed W1 of the conveying roller 119 .
- the transport mode is set to the medium speed mode, the speeds of the brake rollers 113 and the transport rollers 119 are already set to the final speeds U3b and W3b. Do not change the speed of 119.
- the transport mode is set to the low speed mode, the velocities of the brake roller 113 and the transport roller 119 are already set to the final velocities U3c and W3c. Do not change the speed of 119.
- control unit 151 waits until the leading edge of the transported medium passes the position of the transport roller 119 (step S107).
- the control unit 151 periodically acquires the sixth medium signal from the sixth medium sensor 121, and the signal value of the sixth medium signal changes from a value indicating that the medium does not exist to a value indicating that the medium exists. Then, it is determined that the leading edge of the medium has passed the position of the sixth medium sensor 121 .
- the control unit 151 determines that the leading edge of the medium has passed the position of the transport roller 119 when the leading edge of the medium has passed the position of the sixth medium sensor 121 .
- control unit 151 controls the first motor 131 to stop the feeding roller 112 (step S108).
- time T3 indicates when the signal value of the sixth medium signal changes from L to H, that is, when the leading edge of the medium passes the position of the sixth medium sensor 121.
- the controller 151 stops the feed roller 112 (changes the speed to 0).
- the control unit 151 prevents the medium from being pushed by the feeding roller 112 and bent between the feeding roller 112 and the conveying roller 119, thereby preventing the medium from jamming. can.
- control unit 151 causes the imaging device 122 to start imaging the medium (step S109).
- control unit 151 waits until the trailing edge of the transported medium passes the position of the fifth medium sensor 118 (step S110).
- the control unit 151 periodically acquires the fifth medium signal from the fifth medium sensor 118, and the signal value of the fifth medium signal changes from the value indicating the presence of the medium to the value indicating the absence of the medium. It is determined that the trailing edge of the medium has passed the position of the fifth medium sensor 118 when the medium is detected.
- control unit 151 determines whether or not the medium remains on the mounting table 103 (step S111).
- control unit 151 sets the speed of the feeding roller 112 for feeding the succeeding medium (step S112).
- time T4 indicates when the signal value of the fifth medium signal changes from H to L, that is, when the trailing edge of the medium passes the position of the fifth medium sensor 118.
- FIG. As shown in FIGS. 10-12, when the trailing edge of the media passes the position of the fifth media sensor 118, the speed of the feed roller 112 set to feed the following media is changed to the transport mode. Varies accordingly.
- the controller 151 sets the speed of the feeding roller 112 to the first intermediate speed V2a.
- the first intermediate speed V2a is an example of a first speed, and is set to a speed higher than the initial speed V1 and lower than the final speeds V3a and V3b.
- the first speed is the first step speed of the feed roller 112 when feeding the second and subsequent media.
- the first intermediate speed V2a may be set to substantially the same speed as the final speed V3c.
- the controller 151 sets the speed of the feeding roller 112 to the final speed V3c.
- control unit 151 drives the first motor 131 to rotate the feeding roller 112 to feed and transport the following medium (step S113).
- the control unit 151 controls the first motor 131 to rotate the feeding roller 112 at the set speed.
- control unit 151 waits until the leading edge of the subsequent medium passes the position of the second medium sensor 114 (step S114).
- the control unit 151 periodically acquires the second medium signal from the second medium sensor 114, and the signal value of the second medium signal changes from a value indicating the absence of the medium to a value indicating the presence of the medium. Then, it is determined that the leading edge of the medium has passed the position of the second medium sensor 114 .
- control unit 151 changes the speed of the feeding roller 112 (step S115).
- the speed of the feed roller 112 that is changed when the leading edge of the subsequent medium passes the position of the second medium sensor 114 differs according to the transport mode.
- the controller 151 changes the speed of the feeding roller 112 to the second intermediate speed V2b.
- the second intermediate speed V2b is an example of a second speed, and is set higher than the first intermediate speed V2a and lower than the final speed V3a.
- the second speed is the second step speed of the feed roller 112 when feeding the second and subsequent media.
- the second intermediate speed V2b may be set to substantially the same value as the final speed V3b.
- the controller 151 changes the speed of the feeding roller 112 to the final speed V3b. Also, when the transport mode is set to the low speed mode, the control unit 151 does not change the speed of the feeding roller 112 .
- the control unit 151 waits until the trailing edge of the preceding medium passes the imaging position of the imaging device 122 (step S116).
- the control unit 151 periodically acquires the sixth medium signal from the sixth medium sensor 121, and the signal value of the sixth medium signal changes from the value indicating the presence of the medium to the value indicating the absence of the medium. Then, it is determined that the trailing edge of the preceding medium has passed the position of the sixth medium sensor 121 .
- the control unit 151 determines that the trailing edge of the preceding medium has passed the imaging position when the first predetermined time has elapsed since the trailing edge of the preceding medium passed the position of the sixth medium sensor 121 .
- the first predetermined time is set to a value obtained by adding a margin to the time required for the medium to move from the position of the sixth medium sensor 121 to the imaging position.
- control unit 151 acquires an input image from the imaging device 122 and stores the acquired input image in the storage device 140 .
- the control unit 151 outputs the input image stored in the storage device 140 by transmitting it to the information processing device via the interface device 135, and deletes it from the storage device 140 (step S117).
- control unit 151 waits until the leading edge of the succeeding medium passes the position of the fifth medium sensor 118 (step S118), in the same manner as in step S105.
- control unit 151 changes the speed of the feeding roller 112 (step S119).
- time T5 indicates when the signal value of the fifth medium signal changes from L to H, that is, when the leading edge of the following medium passes the position of the fifth medium sensor 118.
- FIG. As shown in FIGS. 10 to 12, when the transport mode is set to the high speed mode, when the leading edge of the succeeding medium passes the position of the fifth medium sensor 118, the controller 151 causes the feed roller 112 to Change the speed to final speed V3a. On the other hand, when the transport mode is set to the medium speed mode or the low speed mode, the controller 151 does not change the speed of the feeding roller 112 .
- step S107 the control unit 151 waits until the leading edge of the succeeding medium passes the position of the transport roller 119 (time T6 in FIG. 10), and in step S108, stops the feeding roller 112. , controls the first motor 131 .
- step S111 if there is no medium left on the mounting table 103, the control unit 151 continues the processing until the trailing edge of the conveyed medium passes the imaging position of the imaging device 122 in the same manner as in step S116. Wait (step S120).
- control unit 151 acquires an input image from the imaging device 122, and outputs the acquired input image by transmitting it to the information processing device via the interface device 135 (step S121).
- control unit 151 waits until the trailing edge of the transported medium passes the position of the ejection roller 123 (step S122).
- the control unit 151 determines that the trailing edge of the medium has passed the position of the discharge roller 123 when a second predetermined time has elapsed since the trailing edge of the medium passed the position of the sixth medium sensor 121 .
- the second predetermined time is set to a value obtained by adding a margin to the time required for the medium to move from the position of the sixth medium sensor 121 to the position of the ejection roller 123 .
- control unit 151 controls the second motor 132 to stop the brake roller 113, the conveying roller 119, the first facing roller 120, the discharging roller 123 and/or the second facing roller 124 (step S123). , ends the series of steps.
- step S117 the control unit 151 may execute the processing from step S118 onwards even if transmission of the input image has not been completed.
- step S118 when the leading edge of the succeeding medium passes the position of the fifth medium sensor 118 and the free space of the storage device 140 is less than a predetermined amount, the controller 151 Feeding may be temporarily stopped.
- the control unit 151 controls the first motor 131 to stop the feeding roller 112 until the free space of the storage device 140 reaches or exceeds a predetermined amount.
- the medium conveying device 100 can efficiently convey the medium while reliably transmitting the input image.
- step S118 when the leading edge of the succeeding medium passes the position of the fifth medium sensor 118, if the distance between the trailing edge of the preceding medium and the leading edge of the succeeding medium is short, Feeding of subsequent media may be temporarily stopped.
- the controller 151 controls the position of the preceding medium from the trailing edge of the preceding medium passing the position of the fifth medium sensor 118 or the sixth medium sensor 121 until the leading edge of the trailing medium passes the position of the fifth medium sensor 118 . to detect the time of If the measured time is less than the third predetermined time, the controller 151 determines that the third predetermined time has elapsed since the trailing edge of the preceding medium passed the position of the fifth medium sensor 118 or the sixth medium sensor 121.
- the first motor 131 is controlled so as to stop the feed roller 112 until it reaches the end.
- FIGS. 13(a) and 13(b) are schematic diagrams for explaining the technical significance of feeding the medium according to the medium reading process shown in FIGS. 8 and 9.
- FIG. 13(a) and 13(b) are schematic diagrams for explaining the technical significance of feeding the medium according to the medium reading process shown in FIGS. 8 and 9.
- 13(a) and (b) are schematic diagrams of the feed roller 112 and the brake roller 113 as seen from the side.
- 13A shows how the first medium M1 is fed from the state where the medium group M is mounted on the mounting table 103, and FIG. is placed, and the second and subsequent media M2 are being fed.
- the leading edge of the media group M is usually moved by the user or by an aligning member (not shown). aligned. Therefore, the leading edge of the first medium M1 arranged on the lowermost side has not reached the nip area between the feed roller 112 and the brake roller 113 . In this case, the weight of the medium group placed above the first medium M1 increases the frictional force between the mediums. Due to this frictional force, the medium group placed on the first medium M1 tries to move downstream together with the fed first medium M1, and is pressed against the brake roller 113 .
- the brake roller 113 will be lifted up by the media group placed above the first medium M1, and the media group will move between the feed roller 112 and the brake roller 113. There is a possibility that double feeding of the media may occur due to entering between them.
- the leading edge of the first medium M1 will float before reaching the nip area between the feed roller 112 and the brake roller 113, and the medium M1 will buckle. can cause media jams.
- the control unit 151 when feeding the first medium among the media placed on the mounting table 103, the control unit 151 causes the feeding roller 112 to feed the medium. is started until the fifth medium sensor 118 detects the leading edge of the medium, the first motor 131 is controlled to rotate the feeding roller 112 at a constant speed.
- the separation period for feeding the first medium is the period from time T1 to time T2 in FIGS.
- the control unit 151 rotates the feeding roller 112 at an initial speed V1 lower than the first intermediate speed V2a when feeding the second and subsequent media. It controls the first motor 131 .
- the controller 151 reduces the speed of the feeding roller 112 during the separation period of the first medium, thereby suppressing the occurrence of double feed or jam of the medium.
- the feeding speed is too low during the separation period of the second and subsequent media M2, it will take a long time to complete the transportation of all the media. However, if the speed of the stopped feeding roller 112 is rapidly increased when feeding the second and subsequent media M2, the first motor 131 may go out of step.
- the control unit 151 causes the second and subsequent media to be fed during the separation period.
- the first motor 131 is controlled to rotate the feed roller 112 at a first intermediate speed V2a and a second intermediate speed V2b higher than the initial speed V1 for feeding the first medium.
- the separation period for feeding the second and subsequent media is the period from time T4 to time T5 in FIGS.
- the control unit 151 causes the feeding roller 112 to rotate at the first intermediate speed V2a and then rotate at the second intermediate speed V2a.
- the first motor 131 is controlled to rotate at V2b.
- control unit 151 reduces the speed of the feeding roller 112 during the separation period of the second and subsequent media, and increases it stepwise to a speed higher than that during the separation period of the first medium. To go.
- control unit 151 can reduce the processing time required for the medium reading process while suppressing the double feed or jam of the medium and the out-of-step of the first motor 131, thereby improving the feeding performance ( It is possible to achieve both a reduction in the occurrence of abnormalities) and processing performance (a reduction in transport time).
- FIG. 14 is a schematic diagram for explaining the technical significance of feeding the medium according to the medium reading process shown in FIGS. 8 and 9.
- FIG. FIG. 14 is a schematic diagram of the lower guide 101a of the lower housing 101 viewed from above.
- FIG. 14 shows a state in which the leading edge of the medium M3 that has been conveyed while being inclined is in contact with only one of the two conveying rollers 119 (first opposing rollers 120). If the speed of the transport roller 119 is substantially the same as the speed of the feed roller 112, the medium M3 is then transported downstream while maintaining the current skew. However, if the speed of the transport roller 119 is higher than the speed of the feed roller 112, then the medium M3 is pulled by the transport roller 119 on the contacting side and rotates in the direction of arrow A9. Therefore, the inclination of the medium M3 increases, and the medium M3 may collide with the side wall of the transport path, causing a medium jam. The greater the difference between the speed of the transport roller 119 and the speed of the feed roller 112, the higher the possibility of a media jam.
- the control unit 151 when the leading edge of the medium passes the position of the fifth medium sensor 118, if there is insufficient free space in the storage device 140, or if the distance between the media is short, the control unit 151 There is a possibility of temporarily stopping the feeding of the medium. However, when the control unit 151 temporarily stops the feeding of the medium, it takes a certain amount of through-up until the speed of the feeding roller 112 reaches the set speed after restarting the feeding of the medium. A period is required. If the speed of the feed roller 112 is not sufficiently increased when the leading edge of the medium reaches the position of the transport roller 119, the skew of the medium may occur.
- the control unit 151 when temporarily stopping the feeding of the medium, the control unit 151 needs to stop the medium sufficiently upstream of the conveying roller 119 .
- a certain amount of through-down period is required from when the control unit 151 stops the first motor 131 to when the feeding roller 112 completely stops rotating.
- the above problem can be avoided by sufficiently increasing the distance between the feed roller 112 and the transport roller 119, but this increases the size of the entire apparatus.
- the control unit 151 causes the feeding roller 112 to move from the second intermediate speed V2b.
- the first motor 131 is controlled to rotate at the high final speed V3a. Therefore, when the leading edge of the medium passes the position of the fifth medium sensor 118, the speed of the feeding roller 112 is set to the second intermediate speed V2b lower than the final speed V3a, and the controller 151 sufficiently The rotation of the feeding roller 112 can be completely stopped in a short time.
- the controller 151 can completely stop the rotation of the feeding roller 112 in a sufficiently short time.
- control unit 151 can stop the medium sufficiently upstream from the transport roller 119 when temporarily stopping the feeding of the medium. As a result, the controller 151 can sufficiently increase the speed of the feeding roller 112 until the leading edge of the medium reaches the position of the conveying roller 119 when restarting the feeding of the medium. It is possible to suppress the increase in inclination and suppress the occurrence of media jams.
- the control unit 151 when the second medium sensor 114 detects the leading edge of the medium during the separation period when feeding the second and subsequent mediums, The first motor 131 is controlled to rotate the feeding roller 112 at the second intermediate speed V2b. After the leading edge of the medium passes the position of the second medium sensor 114, that is, after passing through the nip area between the feeding roller 112 and the braking roller 113, the leading edge of the medium does not collide with the braking roller 113 and float up. . Therefore, the possibility of media buckling and media jamming is low.
- the control unit 151 determines that the leading edge of the medium has passed through the nip area between the feed roller 112 and the brake roller 113 and increases the speed of the feed roller 112 . As a result, the control unit 151 can reduce the medium feeding time while suppressing the occurrence of a medium jam.
- the period during which the feeding roller 112 rotates at the first intermediate speed V2a becomes shorter, and the period during which it rotates at the second intermediate speed V2b becomes longer. can be increased as a total. That is, the control unit 151 can lower the second intermediate speed V2b, and when temporarily stopping the feeding of the medium as described above, the control unit 151 can stop the medium at a position sufficiently upstream of the conveying roller 119. becomes possible. Note that in steps S114 and S115 of FIG. 9, the control unit 151 determines that the fourth predetermined time has elapsed since the start of feeding the medium, not when the leading edge of the medium passed the position of the second medium sensor 114. At times, the speed of the feed rollers 112 may be changed.
- the fourth predetermined time is set to the time required for the leading edge of the medium to pass through the nip area between the feeding roller 112 and the brake roller 113 after the start of feeding the medium, based on preliminary experiments.
- the second medium sensor 114 may be omitted.
- a fifth medium sensor 118 may be arranged at the position of the second medium sensor 114 .
- control unit 151 may increase the amount of current supplied to the first motor 131 and/or the second motor 132 during the through-up period of the first motor 131 and/or the second motor 132 .
- the control unit 151 may increase the amount of current supplied to the first motor 131 and/or the second motor 132 during the through-up period of the first motor 131 and/or the second motor 132 .
- the medium that has entered the nip area between the feed roller 112 and the brake roller 113 is pushed back by the brake roller 113 that rotates in the direction opposite to the medium feeding direction.
- FIG. 13A when starting to feed the first medium M1, the leading edge of each medium placed above the first medium M1 is pushed by the feed roller 112 and the brake. The nip area of roller 113 has not been reached. Therefore, when the feeding of the first medium M1 is started, each medium vigorously enters the nip area between the feeding roller 112 and the brake roller 113 . Therefore, when feeding the first medium M1, the ratio of the speed of the brake roller 113 to the speed of the feeding roller 112 is set to a relatively large value so that the other media can be properly returned to the upstream side. need to
- the brake roller 113 is driven by the same second motor 132 as the transport roller 119 and the discharge roller 123 .
- the medium transport device 100 can reduce the number of motors, and reduce the device cost and device size.
- the speed of the brake roller 113 is reduced, the speed of the transport roller 119 and the discharge roller 123 is also reduced, resulting in reduced media processing performance.
- chattering sound a loud vibration sound
- the control unit 151 controls the rotation speed of the brake roller 113 during the separation period when feeding the first medium among the media placed on the placement table 103. is set to a speed lower than the rotational speed of the brake roller 113 during separation when feeding the second and subsequent media. Thereby, the control unit 151 can suppress the vibration of the brake roller 113 when feeding the first medium, and suppress the generation of vibration noise.
- the transport roller 119 has not yet transported the medium, and even if the rotation speed of the brake roller 113 is reduced, the transport time of the medium does not increase.
- control unit 151 can keep the rotational speed of the conveying roller 119 high by increasing the rotational speed of the brake roller 113 during the separation period when feeding the second and subsequent media. Therefore, the medium transport device 100 can improve processing performance (reduction of transport time) while suppressing increases in device cost and device size.
- the control unit 151 sets the speed of the feeding roller 112 to a sufficiently low initial speed V1 at the start of medium feeding, and sets the initial speed U1 of the brake roller 113 to A speed higher than 1/2 of the initial speed V1 of the feeding roller 112 is set. That is, the control unit 151 determines that the speed of the brake roller 113 during the separation period when feeding the first medium among the media placed on the mounting table 103 is equal to the speed when feeding the first medium.
- the rotational speed of the brake roller 113 is set to be greater than half the speed of the feed roller 112 during separation. As a result, the brake roller 113 can favorably push back the medium that has entered the nip area between the feed roller 112 and the brake roller 113 when the medium is fed.
- the medium conveying device 100 increases the rotation speed of the feeding roller 112 step by step during the period from the start of feeding the medium until the leading edge of the medium passes the feeding roller 112.
- the medium conveying device 100 can reduce the medium feeding time, and when the free space of the storage device 140 is insufficient, or when the distance between the mediums that are continuously fed is short, etc. , it has become possible to appropriately control the stop and restart of the feeding of the medium. Therefore, the medium transport device 100 can better control the feeding of the medium.
- the medium conveying apparatus 100 can better control the feeding of the medium without using a specially configured motor or medium sensor by devising a motor control method. Therefore, the medium transport device 100 better controls the feeding of media while suppressing increases in device cost and device size.
- the medium conveying device 100 rotates the feeding roller 112 at a low speed while the media are being separated, and rotates the feeding roller 112 at a high speed when the media are not separated, thereby separating the media satisfactorily. can be transported in a short period of time.
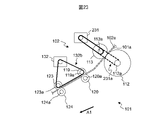
- FIG. 15 illustrates drive sources for the feed roller 112, the brake roller 113, the transport roller 219, the first facing roller 220, the discharge roller 223 and/or the second facing roller 224 in the medium conveying device according to another embodiment. It is a schematic diagram for.
- the medium conveying device includes a conveying roller 219, a first opposing roller 220, a first opposing roller 220, a It has a discharge roller 223 and a second opposing roller 224 . Also, the medium transport device has a second motor 232 instead of the second motor 132 .
- the transport roller 219 is provided in the lower housing 101 , and the first opposing roller 220 is provided in the upper housing 102 above the transport roller 219 .
- the discharge roller 223 is provided in the lower housing 101 , and the second opposing roller 224 is provided in the upper housing 102 above the discharge roller 223 .
- the second motor 232 is provided in the lower housing 101 separately from the first motor 131, and is connected to the transport roller 219, the discharge roller 223, and the brake roller 113 via the second transmission mechanism 232a. It drives the discharge roller 223 and the brake roller 113 .
- the second motor 232 generates driving force for driving the conveying roller 219 , the discharge roller 223 and the brake roller 113 according to the control signal from the processing circuit 150 .
- the second transmission mechanism 232a includes one or more pulleys, belts, gears, or the like provided between the second motor 232 and the shaft 219a of the transport roller 219, the shaft 223a of the discharge roller 223, and the shaft 113a of the brake roller 113. including.
- one or more gears are provided for differentiating the rotation direction and rotation speed of each roller.
- These gears are arranged outside the medium transport path in the width direction A8 so as to transmit driving force across the medium transport path.
- the second transmission mechanism 232 a transmits the driving force generated by the second motor 232 to the transport roller 219 , the discharge roller 223 and the brake roller 113 .
- the second motor 232 rotates the transport roller 219 , the discharge roller 223 and the brake roller 113 to feed, convey and discharge the medium to the transport roller 219 , the discharge roller 223 and the brake roller 113 .
- the second motor 232 is an example of a drive source for the brake roller 113 .
- the first facing roller 220 is a driven roller driven to rotate by the transport roller 219
- the second facing roller 224 is a driven roller to rotate driven by the discharge roller 223
- the first opposing roller 220 and/or the second opposing roller 224 may be provided so as to be driven by the driving force from the second motor 232 .
- one or more gears are provided between the shaft 219a of the transport roller 219 and the shaft 220a of the first opposing roller 220 and/or between the shaft 223a of the discharge roller 223 and the shaft 224a of the second opposing roller 224.
- the second transmission mechanism 232 a further transmits the driving force generated by the second motor 232 to the first facing roller 220 and/or the second facing roller 224 .
- the medium conveying device feeds the medium even when the conveying roller 219 is provided in the lower housing 101 and the conveying roller 219 and the brake roller 113 are driven by the same second motor 232. It was possible to control better.
- FIG. 16 is a flow chart showing an example of part of the operation of the medium reading process of the medium conveying device according to another embodiment.
- the flowchart shown in FIG. 16 is executed instead of the flowchart shown in FIG.
- the processing of steps S211 to S213 and S216 to S223 in FIG. 16 is the same as the processing of steps S111 to S113 and S116 to S123 in FIG. .
- the determination unit 152 determines whether or not the conveyed medium is skewed (step S214).
- the determination unit 152 periodically acquires the third medium signal and the fourth medium signal from the third medium sensor 116 and the fourth medium sensor 117, and determines the medium based on the acquired third medium signal and fourth medium signal. Determine whether or not skew has occurred.
- the determining unit 152 determines that the leading edge of the medium passes the position of the third medium sensor 116 when the signal value of the third medium signal changes from the value indicating that the medium does not exist to the value indicating that the medium exists.
- the determination unit 152 determines that the leading edge of the medium is located at the position of the fourth medium sensor 117 . is determined to have passed.
- the fifth predetermined time is the difference between the difference in transit time between the positions of the sensors when no medium jam occurs and the difference in transit time between the positions of the sensors when a medium jam occurs. is set to the value of On the other hand, when the leading edge of the medium passes through one of the positions of the third medium sensor 116 and the position of the fourth medium sensor 117 and passes the other position within a fifth predetermined time, the determination unit 152 , it is determined that the skew of the medium has not occurred.
- control unit 151 changes the speed of the feeding roller 112 (step S215).
- the control unit 151 changes the speed of the feeding roller 112 to the final speed V3b when the transport mode is set to the medium speed mode, and the transport mode is set to the low speed mode. In this case, the speed of the feeding roller 112 is not changed.
- the control unit 151 changes the speed of the feed roller 112 based on the skew determination result of the medium.
- FIG. 17 is a graph for explaining speed changes of the feed roller 112 in the high speed mode.
- a graph G41 shows the speed change of the feeding roller 112.
- the horizontal axis of the graph G41 indicates time, and the vertical axis indicates speed.
- the speeds of the brake roller 113 and the conveying roller 119 change in the same manner as the graphs G12 and G13 shown in FIG.
- Graphs G14 and G15 show changes in the signal values of the fifth medium sensor 118 and the sixth medium sensor 121, and change in the same manner as the graphs G14 and G15 shown in FIG.
- times T1 to T6 indicate times similar to the times T1 to T6 shown in FIG.
- the control unit 151 changes the speed of the feeding roller 112 to the second intermediate speed V2b as shown in the graph G11 shown in FIG.
- the control unit 151 changes the speed of the feeding roller 112 to the final speed V3a as shown in the graph G41 shown in FIG.
- the final speed V3a is an example of the second speed.
- the final speed V3a is set to the same speed as the speed of the feeding roller 112 .
- the control unit 151 sets the second speed to the second intermediate speed V2b so that the speed of the feeding roller 112 is lower than the speed of the transport roller 119. set.
- the control unit 151 sets the final speed V3a as the second speed so that the speed of the feeding roller 112 is the same as the speed of the transport roller 119. set.
- the control unit 151 may temporarily stop feeding the media.
- the speed of the transport roller 119 is greater than the speed of the feed roller 112
- the skew of the media increases and the media hits the sidewall of the transport path, causing a media jam.
- the control unit 151 allows the medium to be sufficiently moved from the conveying roller 119 when the feeding of the medium is temporarily stopped. It becomes possible to stop at a position on the upstream side.
- the controller 151 can sufficiently increase the speed of the feeding roller 112 until the leading edge of the medium reaches the position of the conveying roller 119 when restarting the feeding of the medium. It is possible to suppress the increase in inclination and suppress the occurrence of media jams.
- the controller 151 sets the speed of the feeding roller 112 to the final speed V3a, thereby reducing the medium feeding time. Therefore, the control unit 151 can reduce the medium transport time while suppressing the occurrence of a medium jam.
- the medium transport device can better control the feeding of the medium even when the speed of the feeding roller 112 is changed depending on whether or not the medium is skewed. .
- FIG. 18 is a flow chart showing an example of part of the operation of the medium reading process of the medium conveying device according to still another embodiment.
- the flowchart shown in FIG. 18 is executed instead of the flowchart shown in FIG. Since the processes of steps S301 to S306 and S308 to S311 in FIG. 18 are the same as the processes in steps S101 to S106 and S107 to S110 of FIG. .
- the controller 151 controls the position of the medium to be transported.
- the thickness is detected (step S307).
- the control unit 151 detects the thickness of the medium based on the ultrasonic signal received from the ultrasonic sensor 115 .
- Ultrasonic waves transmitted by the ultrasonic transmitter 115a and transmitted through the medium are attenuated by the medium, and the thicker the medium, the greater the attenuation of the ultrasonic waves.
- the medium transport device 100 stores in the storage device 140 in advance a table that defines the relationship between the magnitude of the ultrasonic waves received by the ultrasonic receiver 115b, that is, the signal value of the ultrasonic signal, and the thickness of the medium.
- the control unit 151 refers to the table stored in the storage device 140 and identifies the thickness of the medium corresponding to the signal value of the received ultrasonic signal.
- control unit 151 may further determine whether double feeding of media has occurred based on the ultrasonic signal received from the ultrasonic sensor 115 .
- the control unit 151 can determine whether or not double feeding of media has occurred based on whether or not the signal value of the ultrasonic signal is equal to or less than the double feeding threshold.
- the double feed threshold is set to a value between the signal value of the ultrasonic signal when one sheet is conveyed and the signal value of the ultrasonic signal when two sheets are conveyed.
- the control unit 151 stops the first motor 131 and the second motor 132 to stop conveying and ejecting the media.
- the control unit 151 may stop the medium reading process after discharging the medium that is currently being conveyed.
- the control unit 151 may drive each motor and control each roller such that the medium remaining in the conveying path is reversely fed, temporarily returned to the mounting table 103, and then re-fed (separated). . This eliminates the need for the user to remount the medium on the mounting table 103 and feed the medium again, and the control unit 151 can improve convenience for the user.
- the control unit 151 may notify the user by displaying information indicating the occurrence of double feeding of media on the display device 106 or by transmitting the information to the information processing device via the interface device 135 .
- the control unit 151 may detect the thickness of the medium using a thickness sensor other than the ultrasonic sensor 115 .
- the thickness sensor is arranged at the position where the ultrasonic sensor 115 is arranged. Note that the thickness sensor may be arranged at any position on the medium transport path.
- the thickness sensor is, for example, a reflective optical sensor that includes a light emitter/receiver pair on one side of the media transport path and a light emitter/receiver pair on the other side of the media transport path. be.
- the reflected light sensor measures the time from when one pair irradiates light on one side of the medium until it receives the reflected light, and when the other pair irradiates light on the other side of the medium and receives the reflected light.
- the distance between each pair and each surface of the medium is detected from the time until light is received.
- the reflected light sensor produces a thickness signal indicating the thickness of the distance between the two pairs minus each detected distance.
- the medium transport device 100 stores in the storage device 140 in advance a table that defines the relationship between the signal value of the thickness signal and the thickness of the medium.
- the control unit 151 refers to the table stored in the storage device 140 and identifies the thickness of the medium corresponding to the signal value of the received thickness signal.
- the thickness sensor is not limited to one that uses light, and any other sensor capable of detecting the thickness of the medium, such as a pressure sensor or a thickness sensor using a contact piece, may be used as the thickness sensor. may
- step S311 after waiting until the trailing edge of the medium passes the position of the fifth medium sensor 118, the control unit 151 detects the size of the medium to be transported (step S312).
- the control unit 151 detects, for example, the length of the medium in the medium transport direction A1 as the size of the medium.
- the controller 151 Based on the fifth medium signal received from the fifth medium sensor 118, the controller 151 detects the length of the medium in the medium transport direction A1.
- the control unit 151 drives the first motor 131 to determine the distance the medium is moved by the feeding roller 112 by driving the first motor 131 from when the fifth medium sensor 118 detects the leading edge of the medium to when the trailing edge of the medium is detected. is calculated as the length of the medium in the medium transport direction A1. That is, the control unit 151 multiplies the time from when the fifth medium sensor 118 detects the leading edge of the medium to when it detects the trailing edge of the medium by the transport speed of the medium. Calculate as length.
- control unit 151 may detect the length of the medium in the width direction A8 as the size of the medium.
- the medium transport device 100 arranges a large number of fifth medium sensors 118 side by side in the width direction A8, and stores the arrangement intervals of the fifth medium sensors 118 in advance.
- the control unit 151 detects the length of the medium in the width direction A8 based on the distance between the outermost fifth medium sensors 118 that detect the medium being conveyed.
- the control unit 151 detects the length of the medium in the medium transport direction A1 or the length of the medium in the width direction A8 based on the input image generated by the imaging device 122. good too. In that case, the control unit 151 uses a known image processing technique to detect the edge of the medium from the input image, and determines the distance between the top and bottom edges of the medium or the distance between the left and right edges of the medium. Based on the distance, the length of the medium in the medium transport direction A1 or the width direction A8 is detected.
- the controller 151 changes the speed of the feeding roller 112 based on the length of the medium.
- FIG. 19 is a graph for explaining speed changes of the feed roller 112 in the high speed mode.
- Graphs G51 and G52 in FIG. 19 show an example of the speed change of the feed roller 112 .
- the horizontal axes of the graphs G51 and G52 indicate time, and the vertical axes indicate speed.
- the speeds of the brake roller 113 and the conveying roller 119 change in the same manner as the graphs G12 and G13 shown in FIG.
- Graphs G14 and G15 show changes in the signal values of the fifth medium sensor 118 and the sixth medium sensor 121, and change in the same manner as the graphs G14 and G15 shown in FIG.
- times T1 to T6 indicate times similar to the times T1 to T6 shown in FIG.
- step S115 if the size of the medium is equal to or smaller than the first size threshold and larger than the second size threshold, the controller 151 sets the speed of the feeding roller 112 to the second intermediate speed as shown in the graph G11 shown in FIG. Change to speed V2b.
- the first size threshold is set to a value between A4 vertical size and A3 vertical size
- the size of the medium is the length of the medium in the width direction A8. If it is length, it is set to a value between A4 landscape size and A3 landscape size.
- the second size threshold is set to a value less than the first size threshold.
- the second size threshold is set to a value between the A5 vertical size and the A4 vertical size, and the size of the medium is the length of the medium in the width direction A8. If it is length, it is set to a value between A5 landscape size and A4 landscape size.
- the first size threshold and the second size threshold are examples of size thresholds.
- the control unit 151 changes the speed of the feeding roller 112 to the second intermediate speed V2c as shown in graph G51.
- the second intermediate speed V2c is set to a speed higher than the second intermediate speed V2b and lower than the final speed V3a when the media size is equal to or less than the first size threshold and greater than the second size threshold.
- the control unit 151 changes the speed of the feeding roller 112 to the second intermediate speed V2d as shown in graph G52.
- the second intermediate speed V2d is set to a speed lower than the second intermediate speed V2b and higher than the first intermediate speed V2a when the size of the medium is equal to or less than the first size threshold and greater than the second size threshold.
- step S119 if the size of the medium is equal to or smaller than the first size threshold and larger than the second size threshold, the control unit 151 reduces the speed of the feeding roller 112 to the final speed as shown in the graph G11 shown in FIG. Change to speed V3a.
- the controller 151 changes the speed of the feeding roller 112 to the final speed V3d as shown in graph G51.
- the final velocity V3d is set to a velocity higher than the final velocity V3a when the media size is less than or equal to the first size threshold and greater than the second size threshold.
- the control unit 151 changes the speed before the leading edge of the succeeding medium passes the position of the fifth medium sensor 118 as indicated by the dotted line D1 in the graph G51.
- the speed of the feeding roller 112 may be changed to the final speed V3a. That is, the controller 151 reduces the speed of the feed roller 112 to the final speed V3a before the leading edge of the succeeding medium passes the position of the transport roller 119 .
- the control unit 151 can prevent the medium from being pushed by the feed roller 112 and bent between the feed roller 112 and the transport roller 119, thereby preventing the medium from jamming.
- the control unit 151 changes the speed of the feeding roller 112 to the second intermediate speed V2b as shown in graph G52.
- control unit 151 sets the speed of the feeding roller 112 to be the same as when the size of the medium is equal to or smaller than the first size threshold and larger than the second size threshold. speed can be changed. Alternatively, when the size of the medium is equal to or less than the second size threshold, the controller 151 sets the speed of the feeding roller 112 to the speed when the size of the medium is equal to or less than the first size threshold and is greater than the second size threshold. You may change to a similar speed.
- the control unit 151 controls the speed of the feeding roller 112 after the leading edge of the succeeding medium passes through the nip region between the feeding roller 112 and the brake roller 113. Lower the speed for larger media sizes. That is, the control unit 151 sets the second speed when the size of the preceding medium is equal to or less than the size threshold to a speed lower than the second speed when the size of the preceding medium is larger than the size threshold.
- the controller 151 sets the speed of the feed roller 112 when the size of the preceding medium is small to be lower than the speed of the feed roller 112 when the size of the preceding medium is large. You can prevent collisions.
- the controller 151 changes the speed of the feeding roller 112 based on the thickness of the medium in steps S115 and/or S119 of the flowchart shown in FIG. good too.
- step S114 when the thickness of the medium is equal to or less than the first thickness threshold and greater than the second thickness threshold, the controller 151 adjusts the speed of the feeding roller 112 as shown in the graph G11 shown in FIG. The speed is changed to the second intermediate speed V2b.
- the first thickness threshold is set to a value between the thickness of PPC (Plain Paper Copier) paper and the thickness of a general business card.
- the second thickness threshold is set to a value less than the first thickness threshold.
- the second thickness threshold is set to a value between the thickness of typical thin paper and the thickness of PPC paper.
- the first thickness threshold and the second thickness threshold are examples of thickness thresholds.
- the controller 151 changes the speed of the feeding roller 112 to the second intermediate speed V2c as shown in graph G51. Also, when the thickness of the medium is equal to or less than the second thickness threshold, the control unit 151 changes the speed of the feeding roller 112 to the second intermediate speed V2d as shown in graph G52.
- step S119 if the thickness of the medium is equal to or less than the first thickness threshold and greater than the second thickness threshold, the control unit 151 causes the feeding roller 112 Change the speed to final speed V3a.
- the controller 151 changes the speed of the feeding roller 112 to the final speed V3d as shown in graph G51.
- the control unit 151 changes the speed of the feeding roller 112 to the second intermediate speed V2b as shown in graph G52.
- the controller 151 sets the speed of the feed roller 112 to It may be changed to a speed similar to the larger case.
- the control unit 151 controls the speed of the feeding roller 112 to be equal to or less than the first thickness threshold and the second thickness. The speed may be changed to the same speed as when the speed is greater than the threshold.
- the control unit 151 adjusts the speed of the feeding roller 112 after the leading edge of the succeeding medium passes through the nip region between the feeding roller 112 and the brake roller 113 so that the preceding medium is thin. Lower the speed for thicker cases. That is, the control unit 151 sets the second speed when the thickness of the preceding medium is equal to or less than the thickness threshold to a speed lower than the second speed when the thickness of the preceding medium is greater than the thickness threshold. .
- the controller 151 makes the speed of the feeding roller 112 when the preceding medium is thin lower than the speed of the feeding roller 112 when the preceding medium is thick, thereby suppressing the occurrence of a medium jam.
- steps S307 and S311 may be omitted.
- the controller 151 may change the speed of the feeding roller 112 based on both the size and thickness of the medium. In this case, the controller 151 lowers the speed of the feeding roller 112 as the preceding medium is shorter, and lowers the speed of the feeding roller 112 as the preceding medium is thinner.
- the media transport device is now able to better control media feeding even when changing the speed of the feed roller 112 based on the size or thickness of the media.
- 20 and 21 are flowcharts showing an example of the operation of the medium reading process of the medium conveying device according to still another embodiment.
- FIGS. 20 and 21 are executed instead of the flowcharts shown in FIGS. 8 and 9.
- the control unit 151 controls the first motor to reduce the speed of the feeding roller 112 without stopping the feeding roller 112. 131 (step S408). That is, the control unit 151 controls the first motor 131 so that the rotation speed of the feeding roller 112 is reduced and the feeding roller 112 continues to rotate when the leading edge of the medium passes the conveying roller 119 .
- FIG. 22 is a graph for explaining speed changes of the feed roller 112 in the high speed mode.
- a graph G61 shows an example of speed change of the feeding roller 112.
- the horizontal axis of graph G61 indicates time, and the vertical axis indicates speed.
- the speeds of the brake roller 113 and the conveying roller 119 change in the same manner as the graphs G12 and G13 shown in FIG.
- Graphs G64 and G65 show changes in the signal values of the fifth medium sensor 118 and the sixth medium sensor 121, respectively.
- the horizontal axis of each graph G64 and G65 indicates time, and the vertical axis indicates signal value.
- times T1 to T6 indicate times similar to the times T1 to T6 shown in FIG. However, in the examples shown in graphs G61, G64, and G65, the distance between the trailing edge of the preceding medium and the leading edge of the succeeding medium is shorter than in the examples shown in the respective graphs of FIG. short time between
- the control unit 151 shortens the distance between the media that are continuously fed while suppressing the occurrence of media jams between the feed roller 112 and the transport roller 119, thereby shortening the media transport time. can be reduced.
- step S411 After waiting until the trailing edge of the medium passes the position of the fifth medium sensor 118 in step S410, if it is determined in step S411 that the medium remains on the mounting table 103, the control unit 151 causes the feeding roller 112 to move. The speed is changed (step S412). As in step S112 of FIG. 9, the control unit 151 sets the speed of the feeding roller 112 to the first intermediate speed V2a when the transport mode is set to the high speed mode.
- the controller 151 controls the trailing edge of the preceding medium to pass the first position, and then the leading edge of the following medium to move to the first position.
- the time required to pass through the second position is calculated (step S418).
- the time from when the trailing edge of the preceding medium passes the first position to when the leading edge of the succeeding medium passes the second position may be referred to as the medium interval.
- the first position and the second position are set to the position of the fifth medium sensor 118, for example.
- the controller 151 determines whether the leading edge of the succeeding medium passed the position of the fifth medium sensor 118 in step S417 from the time when the trailing edge of the preceding medium passed the position of the fifth medium sensor 118 in step S410.
- the time to time is calculated as the medium interval.
- the first position and the second position may be other arbitrary positions such as the position of the second medium sensor 114 . Also, the first position and the second position are not limited to the same position, and may be different positions.
- control unit 151 determines whether or not the calculated medium interval is equal to or shorter than a predetermined time (step S418). If the medium interval is longer than the predetermined time, the control unit 151 shifts the process to step S422.
- the control unit 151 determines the deceleration time for decelerating the feeding roller 112 based on the medium interval (step S419).
- the deceleration time is the time from when the feed roller 112 is temporarily stopped until the rotation of the feed roller 112 is restarted, or the time from when the feed roller 112 is decelerated to when the feed roller 112 is accelerated. .
- the control unit 151 determines the deceleration time so that the shorter the medium interval, the longer the deceleration time, and the longer the medium interval, the shorter the deceleration time.
- the medium transport device 100 stores in advance a table defining the relationship between the medium interval and the deceleration time in the storage device 140, and the control unit 151 refers to the table stored in the storage device 140 to determine the relationship between the medium interval and the deceleration time. Determine the deceleration time to
- controller 151 reduces the speed of the feeding roller 112 (step S420).
- the control unit 151 reduces the speed of the feed roller 112 to a predetermined speed. For example, the control unit 151 changes the speed of the feeding roller 112 to a speed lower than at least the second intermediate speed V2b to decelerate the feeding roller 112, as indicated by the solid line L2 of the graph G61. Note that the control unit 151 may change the speed of the feeding roller 112 to 0 and stop the feeding roller 112, as indicated by the dotted line D2 in the graph G61.
- control unit 151 waits until the deceleration time determined in step S420 elapses (step S421).
- control unit 151 changes the speed of the feeding roller 112 (step S422).
- control unit 151 changes the speed of the feed roller 112 to the final speed V3a when the transport mode is set to the high speed mode, similar to the process of step S119 in FIG.
- control unit 151 temporarily stops or decelerates the feeding roller 112 when the medium interval is less than or equal to the predetermined time. As a result, the control unit 151 can suppress the occurrence of collisions between continuously fed media.
- control unit 151 temporarily stops or decelerates the feed roller 112 when the leading edge of the medium following the preceding medium passes the fifth medium sensor 118 . Then, based on the medium interval, the control unit 151 determines the timing for temporarily stopping the feeding roller 112 and then restarting the rotation of the feeding roller 112, or the timing for decelerating the feeding roller 112 and then controlling the feeding roller 112. Decide when to accelerate As a result, the control unit 151 appropriately sets the time for decelerating the feeding roller 112, suppresses the collision of the continuously fed media, and prevents the media transport time from increasing too much. can.
- control unit 151 may control the first motor 131 to stop the feeding roller 112, as in step S108 of FIG.
- the control unit 151 sets the speed of the feeding roller 112 and re-drives the first motor 131 to rotate the feeding roller 112, as in steps S112 and S113 of FIG. restart.
- the media transport apparatus is also able to better control the feeding of media when the speed of the feed roller 112 is varied based on the spacing between successive feeds of media. It has become possible.
- FIG. 23 illustrates drive sources for the feed roller 112, the brake roller 113, the transport roller 119, the first opposed roller 120, the discharge roller 123 and/or the second opposed roller 124 in the medium transport device according to still another embodiment. It is a schematic diagram for doing.
- the medium conveying device has a first motor 231 instead of the first motor 131. As shown in FIG. Also, the medium conveying device has a second transmission mechanism 132 b instead of the second transmission mechanism 132 a of the second motor 132 .
- the first motor 231 is provided in the upper housing 102, is connected to the feed roller 112 and the brake roller 113 via the first transmission mechanism 231a, and drives the feed roller 112 and the brake roller 113 together.
- the first motor 231 generates driving force for driving the feed roller 112 and the brake roller 113 according to the control signal from the processing circuit 150 .
- the first transmission mechanism 231 a includes one or more pulleys, belts, gears, etc. provided between the first motor 231 and the shaft 113 a of the brake roller 113 and the shaft 112 a of the feed roller 112 .
- the first transmission mechanism 231 a transmits the driving force generated by the first motor 231 to the feeding roller 112 and the brake roller 113 .
- one or a plurality of gears are provided between the shaft 113a of the brake roller 113 and the shaft 112a of the feed roller 112 for differentiating the rotation direction and rotation speed of each roller. These gears are arranged outside the medium transport path in the width direction A8 so as to transmit driving force across the medium transport path.
- the first motor 231 rotates the feed roller 112 and the brake roller 113 to feed the medium.
- the first motor 231 is an example of a drive source for the brake roller 113 .
- the first motor 231 is provided in the housing (upper housing 102 ) on the side of the brake roller 113 , so that the driving force can be reliably transmitted to the brake roller 113 before the feed roller 112 .
- the first motor 231 can start rotating the brake roller 113 before starting the rotation of the feeding roller 112, and the media can be stably separated.
- the first motor 231 and the shaft 113a of the brake roller 113 are directly connected by a belt. As a result, the first motor 231 can more reliably start rotating the brake roller 113 before starting the rotation of the feeding roller 112 .
- the second motor 132 is provided in the upper housing 102 separately from the first motor 231, is connected to the transport roller 119 and the discharge roller 123 via the second transmission mechanism 132b, and drives the transport roller 119 and the discharge roller 123. do.
- the second motor 132 generates driving force for driving the conveying roller 119 and the discharge roller 123 according to the control signal from the processing circuit 150 .
- the second transmission mechanism 132b includes one or more pulleys, belts, gears, etc. provided between the second motor 132 and the shaft 119a of the transport roller 119 and the shaft 123a of the discharge roller 123.
- the second transmission mechanism 132 b transmits the driving force generated by the second motor 132 to the conveying roller 119 and the discharge roller 123 .
- the second motor 132 rotates the transport rollers 119 and the ejection rollers 123 to transport and eject the medium.
- 24 and 25 are flowcharts showing an example of the operation of the medium reading process of the medium conveying device according to still another embodiment.
- FIGS. 24 and 25 are executed instead of the flowcharts shown in FIGS. 8 and 9.
- the control unit 151 controls the first motor 231 to stop or decelerate the brake roller 113 together with the feeding roller 112 (step S508).
- the medium transport device 100 has a first mode that prioritizes securing the distance between media and a second mode that prioritizes prevention of double feeding of media.
- the first mode and second mode are set by the user using the operation device 105 or the information processing device.
- FIG. 26 is a graph for explaining speed changes of the feed roller 112, the brake roller 113, and the transport roller 119 in the high speed mode.
- a graph G71 shows an example of speed change of the feed roller 112
- a graph G72 shows an example of speed change of the brake roller 113
- a graph G73 shows an example of speed change of the transport roller 119.
- the horizontal axis of each graph G71 to G73 indicates time, and the vertical axis indicates speed.
- Graphs G14 and G15 show changes in the signal values of the fifth medium sensor 118 and the sixth medium sensor 121, and change in the same manner as the graphs G14 and G15 shown in FIG.
- times T1 to T6 indicate times similar to the times T1 to T6 shown in FIG.
- the control unit 151 controls the first motor 231 to stop the feeding roller 112 and the brake roller 113 .
- the speeds of the feeding roller 112 and the brake roller 113 become 0 between time T3 and time T4, as indicated by the solid line L3 of the graph G71 and the solid line L4 of the graph G72.
- the control unit 151 can reliably prevent a medium jam from occurring between the feed roller 112 and the transport roller 119 .
- the control unit 151 continues to rotate the feeding roller 112 and the braking roller 113 while reducing the rotation speed of the feeding roller 112 and the braking roller 113 (without stopping). , the first motor 231 is controlled.
- the speeds of the feed roller 112 and the brake roller 113 do not become 0 between time T3 and time T4, but are reduced.
- the control unit 151 can suppress the deterioration of the separation performance due to stopping the brake roller 113, and can suppress the occurrence of double feeding of the media.
- step S510 After waiting until the trailing edge of the medium passes the position of the fifth medium sensor 118 in step S510, if it is determined in step S511 that the medium remains on the mounting table 103, the controller 151 feeds the subsequent medium.
- the speed of the feeding roller 112 for feeding is set (step S512).
- the controller 151 sets the speed of the feeding roller 112 to the first intermediate speed V2a at time T4, as shown in the graph G71 of FIG. Further, as shown in graph G72, control unit 151 sets the speed of brake roller 113 to first intermediate speed U2a at time T4.
- the first intermediate speed U2a is set to a speed higher than the initial speed U1 and lower than the final speed U3a.
- control unit 151 controls the first motor 231 to rotate the feed roller 112 and the brake roller 113 at the set speed (step S513).
- the controller 151 restarts the rotation of the feed roller 112 and the brake roller 113 to feed and feed the subsequent medium. be transported.
- the controller 151 changes the speed of the feed roller 112 and the brake roller 113 .
- the controller 151 increases the speed of the feed roller 112 to the first intermediate speed V2a and increases the speed of the brake roller 113 to the first intermediate speed U2a.
- control unit 151 After waiting until the leading edge of the subsequent medium passes the position of the second medium sensor 114 in step S514, the control unit 151 changes the speeds of the feed roller 112 and the brake roller 113 (step S515).
- the controller 151 changes the speed of the feeding roller 112 to the second intermediate speed V2b. Further, as shown in graph G72, control unit 151 changes the speed of brake roller 113 to second intermediate speed U2b.
- the second intermediate speed U2b is set to a speed higher than the first intermediate speed U2a and lower than the final speed U3a.
- control unit 151 After waiting until the leading edge of the subsequent medium passes the position of the fifth medium sensor 118 in step S518, the control unit 151 changes the speeds of the feeding roller 112 and the brake roller 113 (step S519).
- control unit 151 changes the speed of the feeding roller 112 to the final speed V3a. Further, as shown in graph G72, control unit 151 changes the speed of brake roller 113 to final speed U3a.
- step S508 the control unit 151 controls the first electromagnetic clutch 133 so as to cut off the driving force from the first motor 231 to the feed roller 112 while decelerating the brake roller 113. 112 may be stopped. That is, when the leading edge of the medium has passed the conveying roller 119, the control unit 151 controls the first electromagnetic clutch 133 to cut off the driving force from the first motor 231 to the feeding roller 112, and 231 continues to transmit the driving force to the brake roller 113 . In this case, in step S ⁇ b>513 , the control unit 151 controls the first electromagnetic clutch 133 to transmit the driving force from the first motor 231 to the feed roller 112 to restart the rotation of the feed roller 112 . As a result, the control unit 151 can prevent the separation performance from being reduced by stopping the brake roller 113 and prevent the distance between the media that are continuously fed from being narrowed.
- the feed roller 112 and the brake roller 113 are driven by the same first motor 231, so the speed of the feed roller 112 and the speed of the brake roller 113 have a proportional relationship.
- the speed of the brake roller 113 is set to be lower than the speed of the feeding roller 112 and higher than half the speed of the feeding roller 112 .
- the medium transport device may operate fixedly in either one of the first mode and the second mode.
- the medium conveying device can better control medium feeding even when the feeding roller 112 and the brake roller 113 are driven by the same first motor 231 .
- FIG. 27 illustrates drive sources for the feed roller 112, the brake roller 113, the transport roller 219, the first facing roller 220, the discharge roller 223 and/or the second facing roller 224 in the medium conveying device according to still another embodiment. It is a schematic diagram for doing.
- the medium conveying device includes a conveying roller 219, a first opposing roller 220, a first opposing roller 220, a It has a discharge roller 223 and a second opposing roller 224 .
- the configuration of the transport roller 219, the first opposing roller 220, the ejection roller 223, and the second opposing roller 224 is similar to that of the transport roller 219, the first opposing roller 220, the ejection roller 223, and the second opposing roller in the medium transporting device shown in FIG. It is the same as the configuration of H.224.
- the medium transport device has a second motor 232 instead of the second motor 132 .
- the configuration of the second motor 232 is the same as the configuration of the second motor 232 in the medium conveying device shown in FIG. Also, the medium transport device has a first motor 231 instead of the first motor 131 .
- the configuration of the first motor 231 is the same as the configuration of the first motor 231 in the medium conveying device shown in FIG.
- the first motor 231 drives the feed roller 112 and the brake roller 113
- the second motor 232 drives the transport roller 219 and the brake roller 113.
- the discharge roller 223 is driven.
- the medium feeding device can feed the medium even when the feed roller 112 and the brake roller 113 are driven by the same first motor 231 while the feed roller 219 is provided in the lower housing 101 . could be better controlled.
- FIG. 28 illustrates drive sources for the feed roller 112, the brake roller 113, the transport roller 119, the first facing roller 120, the discharge roller 123 and/or the second facing roller 124 in the medium conveying device according to still another embodiment. It is a schematic diagram for doing.
- the medium conveying device has a third motor 336 in addition to the first motor 131.
- the medium conveying device has a first transmission mechanism 131b instead of the first transmission mechanism 131a of the first motor 131, and a second transmission mechanism 132b instead of the second transmission mechanism 132a of the second motor 132. have.
- the configuration of the second motor 132 is the same as the configuration of the second motor 132 shown in FIG.
- the first motor 131 is connected to the feeding roller 112 via the first transmission mechanism 131b to drive the feeding roller 112.
- the first motor 131 generates driving force for driving the feeding roller 112 according to a control signal from the processing circuit 150 .
- the first transmission mechanism 131b includes one or more pulleys, belts, gears, etc. provided between the first motor 131 and the shaft 112a of the feeding roller 112, and transmits the driving force generated by the first motor 131. It is transmitted to the feeding roller 112 . As a result, the first motor 131 rotates the feeding roller 112 to feed the medium.
- the third motor 336 is provided in the upper housing 102 separately from the first motor 131 and the second motor 132, is connected to the brake roller 113 via a third transmission mechanism 336a, and drives the brake roller 113.
- the third motor 336 generates driving force for driving the brake roller 113 according to the control signal from the processing circuit 150 .
- the third transmission mechanism 336a includes one or more pulleys, belts, gears, etc. provided between the third motor 336 and the shaft 113a of the brake roller 113, and brakes the driving force generated by the third motor 336. It is transmitted to the roller 113 . Thereby, the third motor 336 rotates the brake roller 113 to feed the medium.
- the third motor 336 is an example of a drive source for the brake roller 113 .
- FIG. 29 is a flow chart showing an example of part of the operation of the medium reading process of the medium conveying device according to still another embodiment.
- step S611 After waiting until the trailing edge of the medium passes the position of the fifth medium sensor 118 in step S110, if it is determined in step S611 that the medium remains on the mounting table 103, the controller 151 adjusts the speed of the conveying roller 119 is controlled so as to reduce (step S612). That is, the controller 151 reduces the rotational speed of the transport roller 119 when the trailing edge of the medium has passed the fifth medium sensor 118 .
- FIG. 30 is a graph for explaining speed changes of the feed roller 112, the brake roller 113, and the transport roller 119 in the high speed mode.
- a graph G81 shows an example of speed change of the feed roller 112
- a graph G82 shows an example of speed change of the brake roller 113
- a graph G83 shows an example of speed change of the transport roller 119.
- the horizontal axis of each graph G81 to G83 indicates time, and the vertical axis indicates speed.
- Graphs G14 and G15 show changes in the signal values of the fifth medium sensor 118 and the sixth medium sensor 121, and change in the same manner as the graphs G14 and G15 shown in FIG.
- times T1 to T6 indicate times similar to the times T1 to T6 shown in FIG.
- the controller 151 may reduce the rotational speed of the transport roller 119 when the trailing edge of the medium passes the second medium sensor 114 instead of the fifth medium sensor 118 .
- the controller 151 reduces the speed of the transport roller 119 when the trailing edge of the medium passes the fifth medium sensor 118 at time T4.
- a feeding roller 112 and a brake roller 113 act on the medium being separated to keep it on the upstream side.
- the control unit 151 can transport the medium at a stable speed by reducing the speed of the transport roller 119 when the trailing edge of the medium passes the feed roller 112 and the brake roller 113 .
- step S613 the control unit 151 waits until the sixth predetermined time elapses (step S613).
- the sixth predetermined time is set to a time during which the feeding of the medium by the feeding roller 112 can be delayed by the amount of the delay in the feeding of the medium due to the deceleration of the feeding roller 119 .
- the control unit 151 can delay the feeding of the medium by the feeding roller 112 by the amount of the delay in the feeding of the medium by the feeding roller 119, and the medium can be fed at a stable speed.
- the process of step S613 may be omitted.
- control unit 151 controls the second motor 132 to increase the speed of the transport roller 119 (step S617). That is, the controller 151 increases the rotational speed of the transport roller 119 when the trailing edge of the medium passes the imaging position of the imaging device 122 .
- the control unit 151 increases the speed of the transport roller 119 when the trailing edge of the medium passes the imaging position between time T4 and time T5.
- the control unit 151 can suppress the expansion or contraction of the medium included in the input image.
- the conveying force applied to the medium decreases, and the conveying speed of the medium tends to decrease.
- the control unit 151 increases the speed of the discharge roller 123, thereby allowing the medium to be conveyed at a stable speed.
- control unit 151 controls the first motor 131 to increase the speed of the feeding roller 112 (step S619). That is, the control unit 151 increases the rotation speed of the feeding roller 112 when the trailing edge of the medium has passed the conveying roller 119 .
- the controller 151 controls the feeding operation after the trailing edge of the medium passes the position of the conveying roller 119 (after the signal value of the graph G15 changes from H to L).
- the speed of roller 112 is increased to second intermediate speed V2b.
- the controller 151 increases the speed of the feed roller 112 after increasing the speed of the transport roller 119 .
- the control unit 151 can prevent the medium from being pushed by the feed roller 112 and bent between the feed roller 112 and the transport roller 119, thereby preventing the medium from jamming.
- control unit 151 changes the speed of the feeding roller 112 to the final speed V3a higher than the second intermediate speed V2b. may be increased to As a result, the control unit 151 can make up for the delay in the transportation of the medium by the transportation roller 119 and the feeding roller 112 .
- the controller 151 controls the first motor 131 to increase the speed of the feed roller 112 (step S621).
- control unit 151 increases the speed of the feeding roller 112 to the final speed V3a at time T5.
- control unit 151 may increase the speed of feeding roller 112 to final speed V3d higher than final speed V3a at time T5.
- the control unit 151 can make up for the delay in the transportation of the medium by the transportation roller 119 and the feeding roller 112 .
- the controller 151 changes the speed before the leading edge of the succeeding medium passes the position of the fifth medium sensor 118, as indicated by the dotted line D7 in the graph G81.
- the speed of the feeding roller 112 may be changed to the final speed V3a.
- the control unit 151 can prevent the medium from being pushed by the feed roller 112 and bent between the feed roller 112 and the transport roller 119, thereby preventing the medium from jamming.
- the drive source for the feed roller 112, the drive source for the brake roller 113, and the drive source for the transport roller 119 and the discharge roller 123 are provided separately, so that the speed of each roller is set at independent timing. can be changed with Therefore, the control unit 151 can flexibly control feeding and transportation of the medium.
- controller 151 temporarily stops the brake roller 113 while the trailing edge of the medium is passing through the nip area between the feed roller 112 and the brake roller 113, and stops the trailing edge of the medium from passing through the nip area. After that, the rotation of the brake roller 113 may be restarted.
- controller 151 reduces the speed of brake roller 113 while the trailing edge of the medium passes through the nip region, and reduces the speed of brake roller 113 after passing through the nip region. may be increased back to the final velocity U3a.
- the control unit 151 reduces the speed of the brake roller 113 when the trailing edge of the medium passes through the nip area, thereby suppressing the leading edge of the following medium from curling up and causing a medium jam.
- control unit 151 may cause the brake roller 113 to start rotating before the feed roller 112 rotates. As a result, the control unit 151 can prevent a plurality of media placed on the placement table 103 from falling between the feed roller 112 and the brake roller 113, thereby suppressing the occurrence of double feeding of the media.
- the feed roller 112, the brake roller 113, and the transport roller 219 are driven by separate motors, and even when the speed of the transport roller 119 is changed, the medium can be fed more efficiently. It was possible to control well.
- the medium conveying device may also drive the brake roller 113 by either the first motor or the second motor when changing the speed of the conveying roller 119 .
- the control unit 151 matches the timing of changing the speed of the brake roller 113 with the timing of changing the speed of the feeding roller 112 or the conveying roller 119 .
- the control unit 151 may change the speed of the feeding roller 112 or the brake roller 113 by controlling the first electromagnetic clutch 133 or the second electromagnetic clutch 134 .
- the medium conveying device has a driving force cutoff mechanism such as an electromagnetic clutch between the conveying roller 119 and the second motor. You can change it.
- FIG. 31 illustrates drive sources for the feed roller 112, the brake roller 113, the transport roller 219, the first facing roller 220, the discharge roller 223 and/or the second facing roller 224 in the medium conveying device according to still another embodiment. It is a schematic diagram for doing.
- the medium conveying device includes a conveying roller 219, a first facing roller 220, a first facing roller 220, a It has a discharge roller 223 and a second opposing roller 224 .
- the configuration of the transport roller 219, the first opposing roller 220, the ejection roller 223, and the second opposing roller 224 is similar to that of the transport roller 219, the first opposing roller 220, the ejection roller 223, and the second opposing roller in the medium transporting device shown in FIG. It is the same as the configuration of H.224.
- the medium transport device has a second motor 232 instead of the second motor 132 .
- the configuration of the second motor 232 is the same as the configuration of the second motor 232 in the medium conveying device shown in FIG.
- the medium transport device also has a third motor 336 in addition to the first motor 131 .
- the configurations of the first motor 131 and the third motor 336 are the same as those of the first motor 131 and the third motor 336 in the medium conveying device shown in FIG.
- the first motor 131 drives the feeding roller 112
- the third motor 336 drives the brake roller 113
- the third motor 336 drives the feeding roller 112, as in the medium conveying apparatus shown in FIG. 2
- a motor 232 drives the transport roller 219 and the discharge roller 223 .
- the conveying roller 219 is provided in the lower housing 101, and the feeding roller 112, the brake roller 113, and the conveying roller 219 are driven by separate motors. It is now possible to better control the feeding.
- FIG. 32 is a flow chart showing an example of part of the operation of the medium reading process of the medium conveying device according to still another embodiment.
- the medium conveying device according to this embodiment has the drive source shown in FIG. 28 or the drive source shown in FIG.
- the flowchart shown in FIG. 32 is executed instead of the flowchart shown in FIG. Since the processes of steps S711, S714 to S716, S719 to S721, S724, and S727 to S731 in FIG. Description is omitted. Only steps S712 to S713, S717 to S718, S722 to S723, and S725 to S726 will be described below. Also, when the flowchart shown in FIG. 32 is executed, steps S301 to S312 of the flowchart shown in FIG. 18 are executed instead of steps S101 to S110 of the flowchart shown in FIG.
- the control unit 151 determines whether the size of the preceding medium is larger than the first size threshold and whether the size is larger than the second size threshold. It is determined whether or not (step S712). If the size of the preceding medium is equal to or smaller than the first size threshold and equal to or larger than the second size threshold, the control unit 151 moves the process to step S714 without executing any particular process.
- the control unit 151 waits until the seventh predetermined time elapses (step S713).
- the seventh predetermined time is, for example, set to a time obtained by subtracting the time required for medium transport from the time required for image processing when a medium larger than the first size threshold is transported.
- the seventh predetermined time is the maximum value of the stop time when a medium collides in a preliminary experiment in which a medium smaller than the second size threshold is continuously conveyed while changing the stop time of the feeding roller 112.
- the seventh predetermined time may be set to a time that can delay the feeding of the medium by the feeding roller 112 by the amount of delay in discharging the medium by decelerating the discharging roller 123 in a process described later. good.
- control unit 151 stops the feeding roller 112 in step S309. Also, after the trailing edge of the medium passes the position of the fifth medium sensor 118 in step S311, the control unit 151 resumes feeding by the feeding roller 112 in step S715.
- the control unit 151 determines the restart timing of feeding by the feeding roller 112 when the size of the medium whose trailing edge has passed the position of the fifth medium sensor 118 is larger than the first size threshold value. is delayed from the restart timing of feeding by the feeding roller 112 when the size of the medium that has passed the position of is equal to or smaller than the first size threshold.
- control unit 151 determines the restart timing of feeding by the feeding roller 112 when the size of the medium whose trailing edge has passed the position of the fifth medium sensor 118 is smaller than the second size threshold value.
- the restart timing of feeding by the feeding roller 112 is delayed from when the size of the medium that has passed the position of the medium sensor 118 is equal to or larger than the second size threshold.
- FIG. 33 is a diagram for explaining speed changes of the feed roller 112, the brake roller 113, and the transport roller 119 in the high speed mode when the size of the preceding medium is larger than the first size threshold or smaller than the second size threshold. graph.
- a graph G91 shows an example of speed change of the feeding roller 112
- a graph G92 shows an example of speed change of the brake roller 113
- a graph G93 shows an example of speed change of the transport roller 119.
- the horizontal axis of each graph G91 to G93 indicates time, and the vertical axis indicates speed.
- Graphs G14 and G15 show changes in the signal values of the fifth medium sensor 118 and the sixth medium sensor 121, and change in the same manner as the graphs G14 and G15 shown in FIG.
- times T1 to T6 indicate times similar to the times T1 to T6 shown in FIG.
- the controller 151 delays the restart timing of feeding by the feeding roller 112 at time T4. .
- the size of the input image becomes large, and image processing may take a long time.
- the control unit 151 delays the feeding restart timing when a large-sized medium is conveyed, so that the medium can be smoothly conveyed without stopping for image processing, and a good image can be obtained. becomes. Further, as described above, in general, the shorter the length of the medium, the shorter the distance between the mediums that are continuously conveyed.
- the control unit 151 delays the feeding restart timing when a medium of a small size is conveyed, thereby suppressing the collision of successively conveyed media. Also, when a large-sized medium or a small-sized medium is conveyed, the control unit 151 reduces the speed of the discharge roller 123 in a process described later. In this case, the control unit 151 delays the feeding restart timing, thereby allowing the medium to be transported at a stable speed.
- the control unit 151 determines whether the size of the preceding medium is larger than the first size threshold and smaller than the second size threshold. It is determined whether or not (step S717). If the size of the preceding medium is equal to or smaller than the first size threshold and equal to or larger than the second size threshold, the control unit 151 moves the process to step S719 without executing any particular process.
- control unit 151 waits until the seventh predetermined time elapses (step S718).
- the controller 151 causes the feeding roller 112 to delay the timing of increasing the speed of As a result, the control unit 151 can acquire a good image by smoothly conveying a medium having a large size without stopping the medium for image processing. In addition, the control unit 151 can suppress collisions with other media when a medium with a small size is conveyed. Also, the control unit 151 can transport the medium at a stable speed.
- control unit 151 After acquiring the input image in step S721, the control unit 151 determines whether the size of the preceding medium is larger than the first size threshold and smaller than the second size threshold (step S722). If the size of the preceding medium is equal to or smaller than the first size threshold and equal to or larger than the second size threshold, the control unit 151 moves the process to step S724 without executing any particular process.
- the controller 151 controls the second motor 132 to reduce the speed of the transport roller 119 and the discharge roller 123. (step S723).
- control unit 151 sets the rotation speed of the ejection roller 123 when the size of the medium is larger than the first size threshold to a speed lower than the rotation speed of the ejection roller 123 when the size of the medium is equal to or smaller than the first size threshold. set.
- control unit 151 sets the rotation speed of the ejection roller 123 when the size of the medium is smaller than the second size threshold to a speed lower than the rotation speed of the ejection roller 123 when the size of the medium is equal to or larger than the second size threshold. set.
- the control unit 151 causes the ejection roller 123 to move between time T4 and time T5. Reduce speed.
- the leading edge of the medium may exceed the leading edge of the ejecting table 104 , and the weight of the leading edge beyond the ejecting table 104 may cause the medium to fly out of the ejecting table 104 .
- the controller 151 reduces the speed of the discharge roller 123 when a large-sized medium is discharged, thereby suppressing the medium from jumping out of the discharge table 104 .
- control unit 151 can improve the alignment of the medium by reducing the speed of the discharge roller 123 when the medium of small size is discharged.
- the control unit 151 determines whether the size of the preceding medium is larger than the first size threshold and smaller than the second size threshold. It is determined whether or not (step S725). If the size of the preceding medium is equal to or smaller than the first size threshold and equal to or larger than the second size threshold, the control unit 151 moves the process to step S727 without executing any particular process.
- control unit 151 waits until the seventh predetermined time elapses (step S727).
- the control unit 151 increases the rotation speed of the feeding roller 112 in step S727.
- the control unit 151 determines the timing to increase the rotational speed of the feeding roller 112 when the size of the preceding medium is larger than the first size threshold, and the timing of increasing the rotational speed of the feeding roller 112 when the size of the preceding medium is equal to or less than the first size threshold.
- the timing of increasing the rotation speed of 112 is delayed.
- the control unit 151 sets the timing for increasing the rotational speed of the feed roller 112 when the size of the preceding medium is smaller than the second size threshold to the timing when the size of the preceding medium is equal to or larger than the second size threshold.
- the timing for increasing the rotation speed of the feeding roller 112 is delayed.
- the controller 151 increases the speed of the feeding roller 112 at time T5. delay the timing. As a result, the control unit 151 can acquire a good image by smoothly conveying a medium having a large size without stopping the medium for image processing. In addition, the control unit 151 can suppress collisions with other media when a medium with a small size is conveyed. Also, the control unit 151 can transport the medium at a stable speed.
- steps S712-S713, S717-S718, S722-S723, or S725-S726 may be omitted.
- the control unit 151 determines whether or not the medium size is larger than the first size threshold, or whether or not the medium size is smaller than the second size threshold. can be judged only. In that case, the control unit 151 performs steps S713, S718, and S723 regardless of whether the size of the medium is smaller than the second size threshold or whether the size of the medium is larger than the first size threshold.
- the process of S726 is executed.
- the control unit 151 determines whether the size of the medium preceding the medium whose trailing end has passed the position of the fifth medium sensor 118 is larger than the first size threshold, You may determine whether it is smaller than a size threshold. That is, the control unit 151 determines the restart timing of feeding by the feeding roller 112 when the size of the medium preceding the medium whose trailing edge has passed the position of the fifth medium sensor 118 is larger than the first size threshold value. The resuming timing of feeding by the feeding roller 112 is delayed when the size of the medium preceding the medium whose trailing end has passed the position of the fifth medium sensor 118 is equal to or smaller than the first size threshold value.
- control unit 151 determines the restart timing of feeding by the feeding roller 112 when the size of the medium preceding the medium whose trailing end has passed the position of the fifth medium sensor 118 is smaller than the second size threshold. , the timing of resuming feeding by the feeding roller 112 when the size of the medium preceding the medium whose trailing end has passed the position of the fifth medium sensor 118 is equal to or larger than the second size threshold.
- control unit 151 can acquire a good image by smoothly conveying a large-sized medium without stopping for image processing.
- control unit 151 can suppress collisions with other media when a medium with a small size is conveyed.
- the controller 151 temporarily stops the brake roller 113 while the trailing edge of the medium is passing through the nip area between the feeding roller 112 and the brake roller 113, and , the rotation of the brake roller 113 may be restarted.
- the control unit 151 reduces the speed of the brake roller 113 while the trailing edge of the medium passes through the nip area, and increases the speed of the brake roller 113 after passing the nip area. It may be increased back to the final speed U3a. As a result, the control unit 151 can prevent the leading edge of the following medium from curling up and jamming of the medium.
- control unit 151 may cause the brake roller 113 to start rotating before the feed roller 112 rotates. As a result, the control unit 151 can prevent a plurality of media placed on the placement table 103 from falling between the feed roller 112 and the brake roller 113, thereby suppressing the occurrence of double feeding of the media.
- the medium transport device can better control the feeding of the medium even when the speed of the discharge roller 123 is changed based on the size of the medium.
- the medium conveying device may drive the brake roller 113 by either the first motor or the second motor when changing the speed of the ejection roller 123 .
- the control unit 151 matches the timing of changing the speed of the brake roller 113 with the timing of changing the speed of the feeding roller 112 or the discharging roller 123 .
- the control unit 151 may change the speed of the feeding roller 112 or the brake roller 113 by controlling the first electromagnetic clutch 133 or the second electromagnetic clutch 134 .
- the medium conveying device has a driving force cutoff mechanism such as an electromagnetic clutch between the discharge roller 123 and the second motor, and the control unit 151 controls the driving force cutoff mechanism to reduce the speed of the conveying roller 119. You can change it.
- FIG. 34 and 35 are flowcharts showing an example of the operation of the medium reading process of the medium conveying device according to still another embodiment.
- the medium conveying device according to this embodiment has the drive source shown in FIG. 28 or the drive source shown in FIG.
- steps S801 to S805, S810 to S821, and S823 to S826 in FIGS. 34 and 35 are the same as the processes in steps S101 to S105, S107 to SS118, and S120 to S123 of FIGS. omitted. Only steps S806 to S809 and S822 will be described below.
- step S805 After waiting until the leading edge of the medium passes the position of the fifth medium sensor 118 in step S805, the control unit 151 temporarily stops the feeding roller 112 or reduces the speed of the feeding roller 112. Then, the first motor 131 is controlled (step S806).
- FIG. 36 is a graph for explaining speed changes of the feed roller 112, the brake roller 113 and the transport roller 119 in the high speed mode.
- graph G101 shows an example of speed change of the feed roller 112
- graph G102 shows an example of speed change of the brake roller 113
- graph G103 shows an example of speed change of the transport roller 119.
- the horizontal axis of each graph G101 to G103 indicates time, and the vertical axis indicates speed.
- Graphs G14 and G15 show changes in the signal values of the fifth medium sensor 118 and the sixth medium sensor 121, and change in the same manner as the graphs G14 and G15 shown in FIG.
- times T1 to T6 indicate times similar to the times T1 to T6 shown in FIG.
- control unit 151 stops the feeding roller 112 at time T2.
- control unit 151 decelerates feeding roller 112 at time T2.
- control unit 151 detects the thickness of the transported medium (step S807) in the same manner as in the process of step S307 in FIG.
- control unit 151 sets and changes the speed of the transport roller 119 based on the detected thickness of the medium (step S808).
- the speed of the conveying roller 119 is set within a range equal to or higher than the initial speed W1 and equal to or lower than the final speed W3a.
- the control unit 151 sets the rotation speed of the transport roller 119 so that the speed of the transport roller 119 is equal to or higher than the speed of the feeding roller 112 .
- the control unit 151 can prevent the medium from being pushed by the feed roller 112 and bent between the feed roller 112 and the transport roller 119, thereby preventing the medium from jamming.
- the speed of the transport roller 119 is set so that the smaller the thickness of the medium, the higher the speed, and the larger the thickness of the medium, the lower the speed.
- the speed of the transport roller 119 may be set such that the thicker the medium, the higher the speed, and the thinner the medium, the lower the speed.
- the medium transport device 100 stores in the storage device 140 in advance a table that defines the relationship between the thickness of the medium and the speed of the transport roller 119 .
- the control unit 151 refers to the table stored in the storage device 140 and identifies the speed corresponding to the detected thickness.
- control unit 151 sets the speed of the transport roller 119 based on the detected thickness of the medium. This allows the control unit 151 to convey the medium at an appropriate speed according to the thickness of the medium.
- the controller 151 changes the speed of the transport roller 119 to the speed set in step S808 while the feed roller 112 is stopped or decelerated.
- control unit 151 restarts the rotation of the feed roller 112 and changes the speed of the brake roller 113 .
- controller 151 changes the speed of the feed roller 112 and the brake roller 113 . (Step S809).
- control unit 151 restarts the rotation of the feeding roller 112, or sets the speed of the feeding roller 112 to the final speed V3a. Change to increase to speed V3a. Further, as shown in graph G102, control unit 151 changes the speed of brake roller 113 to increase to final speed U3a.
- the control unit 151 temporarily stops or decelerates the feed roller 112 when the leading edge of the medium passes the fifth medium sensor 118, detects the thickness of the medium, and determines the thickness of the medium based on the thickness of the medium. Set the rotation speed of the conveying roller 119 . After that, the control unit 151 restarts rotation of the feeding roller 112 or accelerates the feeding roller 112 . If the thickness of the medium is detected while the medium is being fed, a detection error may occur due to shaking of the medium or the like. By detecting the thickness of the medium while the feed roller 112 is temporarily stopped or decelerated, the control unit 151 can detect the thickness of the medium more accurately.
- step S821 the control unit 151 temporarily stops the feeding roller 112 or reduces the speed of the feeding roller 112.
- the first motor 131 is controlled so as to rotate (step S822).
- the control unit 151 detects the thickness of the next medium, sets the rotation speed of the transport roller 119 based on the thickness of the medium, and then the feed roller 112 or accelerate the feeding roller 112 .
- the control unit 151 stops or decelerates the feeding roller 112 at time T5. Thereafter, as shown in graph G103, the control unit 151 changes the speed of the transport roller 119 to the speed newly set in step S808, and as shown in graph G101, restarts the rotation of the feeding roller 112 or causes the feeding roller 112 to resume feeding. Roller 112 is accelerated.
- the media transport device can better control media feeding even when the speed of the transport roller 119 is changed based on the thickness of the media.
- the medium conveying device may also drive the brake roller 113 by either the first motor or the second motor when changing the speed of the conveying roller 119 based on the thickness of the medium.
- the control unit 151 matches the timing of changing the speed of the brake roller 113 with the timing of changing the speed of the feeding roller 112 or the conveying roller 119 .
- the control unit 151 may change the speed of the feeding roller 112 or the brake roller 113 by controlling the first electromagnetic clutch 133 or the second electromagnetic clutch 134 .
- the medium conveying device has a driving force cutoff mechanism such as an electromagnetic clutch between the conveying roller 119 and the second motor. You can change it.
- FIG. 37 is a diagram showing a schematic configuration of a processing circuit 250 in a medium conveying device according to another embodiment.
- the processing circuit 250 is used in place of the processing circuit 150 of the medium transport device 100, and performs medium reading processing and the like instead of the processing circuit 150.
- FIG. The processing circuit 250 has a control circuit 251, a determination circuit 252, and the like. Each of these units may be composed of an independent integrated circuit, microprocessor, firmware, or the like.
- the control circuit 251 is an example of a control section and has the same function as the control section 151.
- the control circuit 251 receives operation signals from the operation device 105 or the interface device 135 . Further, the control circuit 251 outputs the first medium signal, the second medium signal, the ultrasonic wave from the first medium sensor 111, the second medium sensor 114, the ultrasonic sensor 115, the fifth medium sensor 118, and the sixth medium sensor 121, respectively. receive a signal, a fifth medium signal and a sixth medium signal. Further, the control circuit 251 receives the determination result of the skew of the medium from the determination circuit 252 .
- the control circuit 251 controls the first motor 131, the second motor 132, the third motor 336, the first electromagnetic clutch 133, and the second electromagnetic clutch 134 based on the received information, and also receives an input image from the imaging device 122. It acquires and outputs to the interface device 135 .
- the determination circuit 252 is an example of a determination unit and has the same function as the determination unit 152.
- the determination circuit 252 receives the third medium signal, the fourth medium signal, and the fifth medium signal from the third medium sensor 116, the fourth medium sensor 117, and the fifth medium sensor 118, respectively.
- the determination circuit 252 determines whether or not the skew of the medium has occurred based on each received signal, and outputs the determination result to the control circuit 251 .
- the medium transport device can better control the feeding of the medium even when the processing circuit 250 is used.
- the medium transport device 100 may have a thin paper transport mode for transporting thin paper as a medium and a normal mode for transporting other media.
- the controller 151 sets the rotation speed of the feed roller 112 so that the speed of the feed roller 112 in the normal mode is higher than the speed of the feed roller 112 in the thin paper transport mode.
- the thin paper is transported at a lower speed than the other media, so that the control unit 151 can prevent the thin paper from being damaged due to transport.
- the control unit 151 controls the rotation speed of the feed roller 112 and Set the rotation speed of the conveying roller 119 .
- the control unit 151 can prevent the medium from being pushed by the feed roller 112 and bent between the feed roller 112 and the transport roller 119, resulting in a jam of the medium. can be suppressed.
- the control unit 151 controls the speed ratio of the feeding roller 112 to the speed of the feeding roller 119 in the normal mode so that the ratio of the speed of the feeding roller 112 to the speed of the feeding roller 119 in the thin paper feeding mode is smaller.
- the rotation speed of the feed roller 112 and the rotation speed of the transport roller 119 are set. As a result, in the thin paper transport mode, the speed of the feed roller 112 approaches the speed of the transport roller 119, and the thin paper is transported more stably.
- the medium transport device may have a separation mode in which the medium is fed while being separated, and a non-separation mode in which the medium is fed without being separated.
- the control unit 151 executes each medium reading process described above when operating in the separation mode.
- the control unit 151 controls each motor so that the brake roller 113 rotates in the medium feeding direction or rotates together with the feeding roller 112 .
- the control unit 151 controls the second electromagnetic clutch 134 to change the magnitude of torque applied to the brake roller 113 .
- the control unit 151 can appropriately feed the medium in both the separation mode and the non-separation mode.
- the medium transport device may operate fixedly in the high speed mode without having the high speed mode, the medium speed mode, and the low speed mode.
- control unit 151 may use the second medium sensor 114 instead of the fifth medium sensor 118 in determining whether to use the fifth medium sensor 118 . That is, the control unit 151 performs each process when the leading edge or the trailing edge of the medium passes the position of the fifth medium sensor 118 in each of the processes described above. May be executed when passing
- the size or thickness of the medium may be set by the user using the operation device 105 or the information processing device instead of being detected using the sensor.
- the size or thickness of the medium may be specified from the medium type (paper, postcard, business card, etc.) set by the user using the operation device 105 or the information processing device.
- the medium transport device stores in the storage device 140 in advance a table that defines the relationship between the medium type and the size or thickness of the medium.
- the control unit 151 refers to the table stored in the storage device 140 and identifies the size or thickness of the medium to be conveyed.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Delivering By Means Of Belts And Rollers (AREA)
- Sheets, Magazines, And Separation Thereof (AREA)
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023525187A JP7553712B2 (ja) | 2021-05-31 | 2021-05-31 | 媒体搬送装置、制御方法及び制御プログラム |
| PCT/JP2021/020730 WO2022254545A1 (ja) | 2021-05-31 | 2021-05-31 | 媒体搬送装置、制御方法及び制御プログラム |
| US18/521,969 US12410026B2 (en) | 2021-05-31 | 2023-11-28 | Medium conveyance device, control method, and control program |
| JP2024153081A JP7714753B2 (ja) | 2021-05-31 | 2024-09-05 | 媒体搬送装置、制御方法及び制御プログラム |
| JP2025119506A JP2025137653A (ja) | 2021-05-31 | 2025-07-16 | 媒体搬送装置、制御方法及び制御プログラム |
| US19/295,025 US20250361105A1 (en) | 2021-05-31 | 2025-08-08 | Medium conveyance device, control method, and control program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/020730 WO2022254545A1 (ja) | 2021-05-31 | 2021-05-31 | 媒体搬送装置、制御方法及び制御プログラム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/521,969 Continuation-In-Part US12410026B2 (en) | 2021-05-31 | 2023-11-28 | Medium conveyance device, control method, and control program |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022254545A1 true WO2022254545A1 (ja) | 2022-12-08 |
Family
ID=84323977
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/020730 Ceased WO2022254545A1 (ja) | 2021-05-31 | 2021-05-31 | 媒体搬送装置、制御方法及び制御プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (2) | US12410026B2 (https=) |
| JP (3) | JP7553712B2 (https=) |
| WO (1) | WO2022254545A1 (https=) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024060492A (ja) * | 2022-10-19 | 2024-05-02 | 株式会社Pfu | 媒体搬送装置、制御方法及び制御プログラム |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001213536A (ja) * | 2000-02-02 | 2001-08-07 | Canon Inc | シート供給装置 |
| JP2007230681A (ja) * | 2006-02-28 | 2007-09-13 | Kyocera Mita Corp | 用紙搬送装置、およびこれを備えた画像形成装置 |
| JP2008110835A (ja) * | 2006-10-30 | 2008-05-15 | Ricoh Co Ltd | 画像形成装置 |
| JP2014058400A (ja) * | 2012-06-11 | 2014-04-03 | Ricoh Co Ltd | 給紙装置、画像形成装置及び画像読取装置 |
| JP2016199395A (ja) * | 2015-04-14 | 2016-12-01 | キヤノンファインテック株式会社 | 記録装置、記録装置の制御方法及び搬送装置 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0825647B2 (ja) | 1987-06-22 | 1996-03-13 | コニカ株式会社 | 給紙装置 |
| JPH0692490A (ja) | 1992-09-16 | 1994-04-05 | Sharp Corp | 給紙装置 |
| JPH10218398A (ja) * | 1997-01-31 | 1998-08-18 | Minolta Co Ltd | 給紙装置 |
| JP2001139169A (ja) | 1999-11-18 | 2001-05-22 | Ricoh Co Ltd | 自動原稿給紙装置 |
| JP2004315177A (ja) | 2003-04-17 | 2004-11-11 | Ricoh Co Ltd | 用紙搬送装置および画像形成装置 |
| JP4241769B2 (ja) | 2006-06-26 | 2009-03-18 | ブラザー工業株式会社 | シート送り装置 |
| JP4919349B2 (ja) * | 2007-08-10 | 2012-04-18 | 理想科学工業株式会社 | 給紙装置 |
| US9181050B2 (en) | 2010-11-10 | 2015-11-10 | Canon Denshi Kabushiki Kaisha | Sheet feeding apparatus, control method thereof, and document reading apparatus |
| JP5718621B2 (ja) | 2010-11-19 | 2015-05-13 | キヤノン電子株式会社 | シート搬送装置及び情報読取装置 |
| JP5702212B2 (ja) | 2011-04-14 | 2015-04-15 | キヤノン電子株式会社 | シート搬送装置及び情報読取装置 |
| JP6243094B2 (ja) | 2011-07-15 | 2017-12-06 | キヤノン電子株式会社 | シート搬送装置及びその制御方法、情報読取装置 |
| JP6528548B2 (ja) * | 2015-06-08 | 2019-06-12 | ブラザー工業株式会社 | シート搬送装置及び画像形成システム |
| US10142503B2 (en) | 2016-06-28 | 2018-11-27 | Seiko Epson Corporation | Image reading apparatus |
| JP6720726B2 (ja) | 2016-06-28 | 2020-07-08 | セイコーエプソン株式会社 | 画像読取装置、搬送方法 |
| JP6926479B2 (ja) | 2017-01-06 | 2021-08-25 | セイコーエプソン株式会社 | 画像読取装置 |
| JP6946919B2 (ja) | 2017-10-16 | 2021-10-13 | セイコーエプソン株式会社 | 画像読取装置 |
| EP3733574B1 (en) | 2017-12-26 | 2024-11-13 | Canon Denshi Kabushiki Kaisha | Sheet feeder and control method for sheet feeder |
| WO2019130648A1 (ja) | 2017-12-26 | 2019-07-04 | キヤノン電子株式会社 | シート給送装置、シート給送装置の制御方法、及びプログラム |
| EP3617106B1 (en) | 2018-08-29 | 2024-01-03 | Seiko Epson Corporation | Medium feeding apparatus, image reading apparatus, and medium feeding method |
| JP7275655B2 (ja) | 2018-08-29 | 2023-05-18 | セイコーエプソン株式会社 | 媒体給送装置、画像読取装置 |
| JP7251317B2 (ja) | 2019-05-29 | 2023-04-04 | セイコーエプソン株式会社 | 画像読取装置、及び、その制御方法 |
-
2021
- 2021-05-31 JP JP2023525187A patent/JP7553712B2/ja active Active
- 2021-05-31 WO PCT/JP2021/020730 patent/WO2022254545A1/ja not_active Ceased
-
2023
- 2023-11-28 US US18/521,969 patent/US12410026B2/en active Active
-
2024
- 2024-09-05 JP JP2024153081A patent/JP7714753B2/ja active Active
-
2025
- 2025-07-16 JP JP2025119506A patent/JP2025137653A/ja active Pending
- 2025-08-08 US US19/295,025 patent/US20250361105A1/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001213536A (ja) * | 2000-02-02 | 2001-08-07 | Canon Inc | シート供給装置 |
| JP2007230681A (ja) * | 2006-02-28 | 2007-09-13 | Kyocera Mita Corp | 用紙搬送装置、およびこれを備えた画像形成装置 |
| JP2008110835A (ja) * | 2006-10-30 | 2008-05-15 | Ricoh Co Ltd | 画像形成装置 |
| JP2014058400A (ja) * | 2012-06-11 | 2014-04-03 | Ricoh Co Ltd | 給紙装置、画像形成装置及び画像読取装置 |
| JP2016199395A (ja) * | 2015-04-14 | 2016-12-01 | キヤノンファインテック株式会社 | 記録装置、記録装置の制御方法及び搬送装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2024161238A (ja) | 2024-11-15 |
| JPWO2022254545A1 (https=) | 2022-12-08 |
| JP7714753B2 (ja) | 2025-07-29 |
| JP2025137653A (ja) | 2025-09-19 |
| US20240092604A1 (en) | 2024-03-21 |
| US12410026B2 (en) | 2025-09-09 |
| JP7553712B2 (ja) | 2024-09-18 |
| US20250361105A1 (en) | 2025-11-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5718621B2 (ja) | シート搬送装置及び情報読取装置 | |
| US9873577B2 (en) | Image reading apparatus having first motor for rotating feed roller, and second motor for rotating conveyance roller and reverse roller | |
| JP2018108889A (ja) | 画像読取装置 | |
| JP2025137653A (ja) | 媒体搬送装置、制御方法及び制御プログラム | |
| JP2025129354A (ja) | 媒体搬送装置、制御方法及び制御プログラム | |
| US11117772B2 (en) | Medium ejection apparatus for ejecting media to align the positions of the media ejected onto an ejection tray | |
| US20220146977A1 (en) | Post-processing apparatus | |
| US8717645B2 (en) | Sheet feeding device | |
| US20260015194A1 (en) | Medium conveyance apparatus to determine whether tilt angle of medium has changed based on time from when any sensor detects medium to when another sensor detects medium | |
| JP5301954B2 (ja) | シート給送装置及び画像読取装置 | |
| JP2025092742A (ja) | 媒体搬送装置、媒体給送方法及び制御プログラム | |
| JP2024138560A (ja) | 媒体搬送装置、媒体給送方法及び制御プログラム | |
| JP7285995B2 (ja) | 媒体排出装置、制御方法及び制御プログラム | |
| JP7191198B2 (ja) | 重送検出装置、制御方法及び制御プログラム | |
| JP7207979B2 (ja) | 原稿搬送装置、制御方法及び制御プログラム | |
| JP7785793B2 (ja) | 媒体搬送装置、制御方法及び制御プログラム | |
| US12600587B2 (en) | Medium feed apparatus to advance succeeding sheet of medium when preceding sheet of medium passes pick roller | |
| JP7773856B2 (ja) | 媒体搬送装置、制御方法及び制御プログラム | |
| US20250206554A1 (en) | Medium conveying apparatus, medium conveying method, and computer-readable non-transitory medium | |
| JP7691873B2 (ja) | 媒体排出装置、制御方法及び制御プログラム | |
| JP2019108177A (ja) | シート搬送装置及び画像読取装置 | |
| JP2023137046A (ja) | 媒体排出装置、媒体排出方法及び制御プログラム | |
| WO2023166734A1 (ja) | 媒体搬送装置、媒体給送方法及び制御プログラム | |
| WO2023175866A1 (ja) | 媒体搬送装置、媒体搬送方法及び制御プログラム | |
| JP2020105014A (ja) | 媒体搬送装置、制御方法及び制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21944053 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023525187 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21944053 Country of ref document: EP Kind code of ref document: A1 |