WO2021157629A1 - 電子装置 - Google Patents
電子装置 Download PDFInfo
- Publication number
- WO2021157629A1 WO2021157629A1 PCT/JP2021/003999 JP2021003999W WO2021157629A1 WO 2021157629 A1 WO2021157629 A1 WO 2021157629A1 JP 2021003999 W JP2021003999 W JP 2021003999W WO 2021157629 A1 WO2021157629 A1 WO 2021157629A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- electronic component
- mounted member
- fill
- electronic device
- solder
- Prior art date
Links
Images













Classifications
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K3/00—Apparatus or processes for manufacturing printed circuits
- H05K3/30—Assembling printed circuits with electric components, e.g. with resistor
- H05K3/32—Assembling printed circuits with electric components, e.g. with resistor electrically connecting electric components or wires to printed circuits
- H05K3/34—Assembling printed circuits with electric components, e.g. with resistor electrically connecting electric components or wires to printed circuits by soldering
- H05K3/341—Surface mounted components
- H05K3/3431—Leadless components
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5783—Mountings or housings not specific to any of the devices covered by groups G01C19/5607 - G01C19/5719
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K1/00—Printed circuits
- H05K1/18—Printed circuits structurally associated with non-printed electric components
- H05K1/181—Printed circuits structurally associated with non-printed electric components associated with surface mounted components
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K2201/00—Indexing scheme relating to printed circuits covered by H05K1/00
- H05K2201/10—Details of components or other objects attached to or integrated in a printed circuit board
- H05K2201/10007—Types of components
- H05K2201/10151—Sensor
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K2201/00—Indexing scheme relating to printed circuits covered by H05K1/00
- H05K2201/10—Details of components or other objects attached to or integrated in a printed circuit board
- H05K2201/10613—Details of electrical connections of non-printed components, e.g. special leads
- H05K2201/10954—Other details of electrical connections
- H05K2201/10977—Encapsulated connections
Definitions
- the present disclosure relates to an electronic device in which an electronic component is arranged on a mounted member via solder.
- the mounted member is composed of, for example, a printed circuit board or the like.
- the electronic component is composed of a QFN (abbreviation of Quad Flat No leaded package) having a plurality of electrodes on the back surface side, and has a rectangular parallelepiped outer shape.
- a plurality of electrodes are connected to the mounted member via solder.
- a side fill that mechanically connects the electronic component and the mounted member is arranged around the solder so as to reduce the stress applied to the solder and extend the life of the solder. ing. More specifically, the side fill of the electronic device is arranged so as to cover the corner portion of the electronic component in the normal direction with respect to the surface direction of the mounted member.
- the side fill is arranged so as to cover the corners of the electronic component in the normal direction.
- the side fill is arranged up to the corner of the electronic component on the side opposite to the mounted member side, the stress generated due to the side fill tends to increase at the corner of the electronic component, which is generated in the electronic component. Moment tends to increase. Therefore, there is a possibility that a defect may occur in the electronic component.
- the purpose of this disclosure is to provide an electronic device in which defects of electronic components are less likely to occur.
- an electronic device has a mounted member having one surface and an outer shape having a rectangular shape, and a plurality of electrodes are formed on a surface facing one surface of the mounted member and arranged on one surface.
- the electronic component is placed between the electrode and the mounted member of the electronic component, the solder that electrically and mechanically connects the electrode and the mounted member, and the solder that is placed around the solder, and the electronic component and the mounted member are mounted.
- a side fill for mechanically connecting the mounting member is provided, and the side fill is arranged so that the corner portion of the electronic component on the side opposite to the mounted member side is exposed.
- the stress generated in the corners of the electronic component due to the side fill is larger than that in the case where the corners of the electronic component on the opposite side to the mounted member side are covered with the side fill. It is possible to suppress the increase of the moment generated in the electronic component. Therefore, it is possible to suppress the occurrence of defects in the electronic components.
- the electronic device of the first embodiment will be described with reference to the drawings.
- an electronic device constituting a self-position estimation system including GNSS (abbreviation of Global Navigation Satellite System) and IMU (abbreviation of Inertial Measurement Unit) will be described.
- the electronic device of the present embodiment is, for example, a vehicle equipped with a level 3 or higher driving support device at the level of automation defined by the Japanese government or the National Highway Traffic Safety Administration (NHTSA). It is suitable to be mounted on.
- GNSS abbreviation of Global Navigation Satellite System
- IMU abbreviation of Inertial Measurement Unit
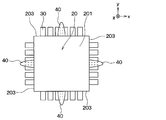
- the electronic device has a configuration in which the electronic component 20 is arranged on the printed circuit board 10 as the mounted member.
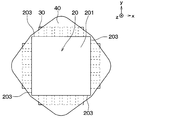
- the insulating film 15 and the side fill 40 which will be described later, are omitted, and the wiring pattern 11 and the like covered with the insulating film 15 are also shown by solid lines.
- the cross-sectional structure of the electronic component 20 is shown in a simplified manner.
- one direction in the plane direction of the printed substrate 10 is the x-axis direction
- the direction orthogonal to the x-axis direction in the plane direction is the y-axis direction
- the x-axis direction and the direction orthogonal to the y-axis direction are the z-axis.
- the wiring pattern 11 and the land 11a connected to the wiring pattern 11 are formed on the one side 10a side, the wiring pattern 12 is formed on the other side 10b side, and the wiring layer 13 is formed inside. It is a formed multilayer wiring board.
- the wiring pattern 11 formed on the one side 10a side, the wiring pattern 12 formed on the other side 10b side, and the wiring layer 13 formed inside are appropriately connected via the through via 14.
- such a printed circuit board 10 is constructed by using, for example, a glass epoxy board or the like.
- the insulating film 15 is formed on the one side 10a side, and the insulating film 16 is formed on the other side 10b side.
- the insulating films 15 and 16 are each made of a solder resist or the like.
- a contact hole 15a that exposes the land 11a connected to the electronic component 20 is formed in the insulating film 15 formed on the one side 10a side.
- the wiring pattern 11 formed around the electronic component 20 is omitted in the normal direction (that is, the z-axis direction) with respect to the surface direction of the printed circuit board 10.
- the wiring pattern 11 is formed so as to be connected to the land 11a to which the electronic component 20 is connected.
- the electronic component 20 is configured to include an inertial force sensor that detects an inertial force.
- the electronic component 20 includes an acceleration sensor that detects acceleration in the x-axis direction, an acceleration sensor that detects acceleration in the y-axis direction, and an acceleration sensor that detects acceleration in the z-axis direction.
- the electronic component 20 includes an angular velocity sensor that detects an angular velocity around the x-axis direction, an angular velocity sensor that detects an angular velocity around the y-axis direction, and an angular velocity sensor that detects an angular velocity around the z-axis direction.
- the electronic component 20 of this embodiment is a so-called IMU.
- the electronic component 20 of the present embodiment is QFN, although the specific configuration is omitted, and each acceleration sensor and each angular velocity sensor are housed in the case 21.
- the case 21 has a rectangular parallelepiped outer shape, and has four side surfaces 203 connecting one side 201, one side 201 and the other side 202 on the opposite side, and one side 201 and the other side 202.
- the rectangular parallelepiped shape here also includes a cube shape. Further, the rectangular parallelepiped shape here means a slight curvature at a corner portion that is an intersection of one side surface 201 and two adjacent side surfaces 203, a corner portion that is an intersection of two side surfaces 203 adjacent to another surface 202, and the like. It includes those in which parts are formed.
- a plurality of electrodes 22 electrically connected to each acceleration sensor and each angular velocity sensor housed in the case 21 are formed on a surface including the other surface 202.
- the plurality of electrodes 22 are formed so as to extend from each side surface 203 to the other surface 202, respectively.
- the land 11a formed on the printed circuit board 10 and each electrode 22 are electrically and mechanically connected via the solder 30.
- the electronic component 20 is arranged so that each side surface 203 is parallel to the x-axis direction or the y-axis direction.
- a side fill 40 made of an epoxy resin is arranged so as to mechanically connect the printed circuit board 10 and the electronic component 20. That is, the electronic component 20 is mechanically connected to the printed circuit board 10 via the solder 30 and the side fill 40.
- FIG. 5 is a schematic view of the electronic component 20 as viewed from the normal direction with respect to one of the side surfaces 203, but the printed circuit board 10 is shown as a cross-sectional view of a portion corresponding to the one side surface 203. Further, in FIG. 5, the solder 30 arranged between each electrode 22 and the land 11a is omitted.
- four side fills 40 are arranged so as to be mechanically connected to each side surface 203 of the electronic component 20 in the z-axis direction, and the four side fills 40 are arranged apart from each other. ing.
- the electronic component 20 in the electronic component 20, six electrodes 22 are arranged from each side surface 203 to the other surface 202, and the solder 30 is arranged so as to be connected to each electrode 22.
- the width direction is defined as the direction along the surface direction of one surface 10a of the printed circuit board 10 on the side surface 203.
- the width direction can be said to be the direction along the boundary line between the one side surface 201 and the other side surface 202 on the side surface 203, and is the left-right direction on the paper surface in FIG.
- the side fill 40 of the present embodiment exposes the solder 30 connected to the electrodes 22 at both ends in the width direction, and covers the solder 30 connected to the electrodes 22 at the inner edge in the width direction. It is arranged in a portion located between the solders 30.
- the side fill 40 is arranged so as to spread in the width direction in the normal direction with respect to the side surface 203 of the case 21.
- the side fill 40 has a mountain shape in which the height from the printed circuit board 10 (hereinafter, also simply referred to as the height) is lower than the portion where both ends in the width direction are located on the inner edge side.
- the side fill 40 has a length w1 between the highest height portion and one end portion in the normal direction with respect to the side surface 203, and the highest height portion and the other end portion. The length between them is equal to w2. That is, the height of the portion of the side fill 40 located at the center in the width direction is the highest.
- the length w1 and the length w2 of the side fill 40 may be different. That is, the height of the portion of the side fill 40 different from the center in the width direction may be the highest.
- each side fill 40 is arranged so as to be point-symmetric with respect to the center of the electronic component 20. Further, each side fill 40 is arranged so as to pass through the center of the electronic component 20 and be line-symmetric with respect to the virtual line extending in the x-axis direction and line-symmetrically with respect to the virtual line extending in the y-axis direction. ing.
- the side fill 40 is arranged so that the corner portion (hereinafter, also simply referred to as the upper end corner portion) C1 of the electronic component 20 on the side opposite to the printed circuit board 10 side is exposed.
- the side fill 40 connected to each side surface 203 is arranged so as to expose the solder 30 connected to the electrodes 22 at both ends in the width direction as described above.
- the side fill 40 is arranged so that the corner portion (hereinafter, simply referred to as the lower end corner portion) C2 on the printed circuit board 10 side of the electronic component 20 is also exposed.
- the upper end corner portion C1 can be said to be an intersection of one side surface 201 and two adjacent side surfaces 203.
- the lower end corner portion C2 can be said to be the intersection of the other surface 202 and the two adjacent side surfaces 203.
- the printed circuit board 10 is connected to external electronic components 51 such as chip resistors and chip capacitors, a microcomputer 52, GNSS components 53, and other circuit units. Socket 54 and the like are mounted. Further, the printed circuit board 10 is formed with a screw hole 17 or the like at the outer edge portion through which a screw for screw-fixing the printed circuit board 10 is inserted into a housing made of an aluminum alloy or the like.
- the above is the configuration of the electronic device in this embodiment.
- such an electronic device is screwed to the housing by inserting a screw into a screw hole 17 formed in the printed circuit board 10, and a metal lid portion accommodates the electronic device.
- a metal lid portion accommodates the electronic device.
- the in-vehicle mounted component By being provided on the body, it constitutes an in-vehicle mounted component.
- the in-vehicle mounted parts are mounted on the vehicle by mechanically fixing the housing, and are used to execute various controls of the vehicle.
- the printed circuit board 10 may warp when the electronic device is fixed to the housing or when the vehicle-mounted component is mounted on the vehicle after the vehicle-mounted component is configured. That is, the electronic device of the present embodiment is configured by arranging the electronic components 20 on the printed circuit board 10 where warpage may occur.
- the life of the solder 30 can be extended.
- the side fill 40 is arranged so as to expose the upper end corner portion C1 of the electronic component 20. Therefore, the stress that can be generated in the upper end corner C1 of the electronic component 20 is larger than that in the case where the upper end corner C1 of the electronic component 20 is covered with the side fill 40, such as when the printed circuit board 10 is warped. It is possible to suppress the increase of the moment generated in the electronic component 20. Therefore, it is possible to suppress the occurrence of defects in the electronic components.
- the electronic component 20 is an IMU, and when the moment generated in the electronic component 20 becomes large, problems such as 0-point fluctuation and axis misalignment are likely to occur.
- the side fill 40 is arranged as described above, it is possible to suppress the occurrence of problems such as 0-point fluctuation and axis misalignment. That is, according to the electronic device of the present embodiment, the robustness of the electronic component 20 can be improved, and the deterioration of the detection accuracy of the IMU can be suppressed. Further, since it is difficult for the electronic component 20 to fluctuate at 0 points, it is not necessary to perform 0 point correction after assembling the electronic device, and it is possible to reduce the adjustment cost and the inspection cost.
- each side fill 40 has a mountain shape in which the height of the end portion in the width direction is lower than the height of the inner edge portion. Therefore, for example, as compared with the case where the height of the side fill 40 is constant along the width direction, it is not necessary to strictly control the shape of the side fill 40, and the manufacturing process can be simplified. Can be done.
- the side fill 40 is arranged point-symmetrically with respect to the center of the electronic component 20. Further, the side fill 40 is arranged so as to pass through the center of the electronic component 20 and be line-symmetric with respect to the virtual line extending in the x-axis direction and line-symmetrically with respect to the virtual line extending in the y-axis direction. There is. Therefore, the stress propagated from each side fill 40 to the electronic component 20 can be easily made uniform. That is, it becomes easy to maintain the balance of stress due to the side fill 40. Therefore, it is possible to further suppress the occurrence of defects in the electronic component 20.
- the electronic component 20 is an IMU, and it is used to configure a self-position estimation system. Then, as described above, the electronic component 20 is in a state where the inertial force of the 6 axes can be detected with high accuracy because the deviation in the axial direction is suppressed and the occurrence of 0-point fluctuation is suppressed. ing. Therefore, the electronic device of the present embodiment can realize dead reckoning (that is, inertial navigation) of the vehicle for a long time.
- the life of the solder 30 can be extended.
- the portion where the printed circuit board 10 and the electronic component 20 are mechanically connected increases. Therefore, for example, when the printed circuit board 10 is warped, electrons are emitted from the printed circuit board 10. The stress propagated to the component 20 increases.
- the amount of arrangement of the side fill 40 increases, so that the maximum tensile stress applied to the solder 30 decreases. Therefore, as the amount of the side fill 40 arranged is increased, the life of the solder 30 can be extended.
- the amount of the side fill 40 arranged here is the amount of the portion that mechanically connects the printed circuit board 10 and the electronic component 20. Then, increasing the arrangement amount of the side fill 40 means increasing the number of portions that mechanically connect the printed circuit board 10 and the electronic component 20.
- the side fill 40 has the above configuration and the arrangement amount is set according to the application.
- each side fill 40 may be arranged as shown in FIGS. 8A-8C. That is, each side fill 40 is connected to the two electrodes 22 at the inner edge in the width direction while exposing the solder 30 connected to the two electrodes 22 at both ends in the width direction in the normal direction with respect to the printed circuit board 10. It may be arranged so as to cover the solder 30 to be formed. In this case, as shown in FIGS. 8A to 8C, the length of the side fill 40 in the width direction can be appropriately changed.
- the side fill 40 may be arranged so as to expose the solder 30 connected to the electrode 22 which is not electrically connected to the inertial force sensor. That is, the side fill 40 may be arranged so as to expose the solder 30 which does not affect the electrical connection between the electronic component 20 and the printed circuit board 10 even if the solder 30 is destroyed. Further, as shown in FIG. 8D, each side fill 40 may be arranged so as to cover all the solder 30 connected to each electrode 22.
- each side fill 40 can be changed as appropriate.
- the side fill 40 may be formed so that the height reaches 201 on one side.
- the side fill 40 may be set to have substantially the same height as the solder 30.
- the outer surface of the side fill 40 may be curved instead of linear.
- the side fill 40 is arranged so that the portions arranged on the side surface 203 of the case 21 are connected to each other.
- the side fills 40 arranged on the side surface 203 of the case 21 are connected to each other in the vicinity of the lower end corner portion C2 of the electronic component 20, and the upper end corner portion C1 is exposed.
- the lower end corner portion C2 of the electronic component 20 may be covered with the side fill 40 or may be exposed from the side fill 40.
- the portions arranged on the side surface 203 of the case 21 are connected to each other. Therefore, detailed control for preventing the side fills 40 arranged on the side surface 203 of the case 21 from being connected to each other becomes unnecessary, and the manufacturing process can be simplified.
- the printed circuit board 10 as a member to be mounted may be composed of a ceramic substrate or the like instead of a glass epoxy substrate.
- the electronic component 20 does not have to include three acceleration sensors and three angular velocity sensors.
- the electronic component 20 may have a configuration having two or less acceleration sensors, or may have a configuration having two or less angular velocity sensors.
- the electronic component 20 may be composed of only an acceleration sensor or may be composed of only an angular velocity sensor.
- the electronic component 20 may be configured to have a physical quantity sensor that detects a physical quantity different from the acceleration or the angular velocity. In this case, the electronic component 20 may be configured to have only this physical quantity sensor, or may be configured to have at least one of the physical quantity sensor, the acceleration sensor, and the angular velocity sensor.
- the electronic component 20 may not be provided with a sensor for detecting a physical quantity including acceleration and angular velocity, and may have a configuration in which a capacitor, a resistor, or the like is arranged.
- the electronic component 20 does not have to be a QFN as long as the electrode 22 is arranged on the surface including the other surface 202.
- the electronic component 20 includes SON (abbreviation of Small Outline Non-leaded package), VSON (abbreviation of Very-thin Small Outline Non-leaded package), TQFN (abbreviation of Thin-Quad Flat No-Lead Plastic package), and LCC.
- the side fill 40 may be arranged so as to have a symmetrical configuration of one of point symmetry and line symmetry.
- the side fills 40 When the side fills 40 are arranged line-symmetrically, they may be arranged so as to be line-symmetrical with respect to one of the virtual line extending in the x-axis direction and the virtual line extending in the y-axis direction. Further, the side fills 40 may not be arranged so as to be point-symmetrical and line-symmetrical.
- an underfill may be arranged between the printed circuit board 10 and the other surface 202 of the electronic component 20.
Landscapes
- Engineering & Computer Science (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Manufacturing & Machinery (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Structures For Mounting Electric Components On Printed Circuit Boards (AREA)
- Electric Connection Of Electric Components To Printed Circuits (AREA)
- Gyroscopes (AREA)
Abstract
一面(10a)を有する被実装部材(10)と、外形が直方体状とされ、被実装部材(10)の一面(10a)と対向する面(202)に複数の電極(22)が形成され、一面(10a)上に配置される電子部品(20)と、電子部品(20)の電極(22)と被実装部材(10)との間に配置され、電子部品(20)の電極(22)と被実装部材(10)とを電気的機械的に接続するはんだ(30)と、はんだ(30)の周囲に配置され、電子部品(20)と被実装部材(10)とを機械的に接続するサイドフィル(40)と、を備える。そして、サイドフィル(40)は、電子部品(20)における被実装部材(10)側と反対側の角部が露出するように配置する。
Description
本出願は、2020年2月4日に出願された日本特許出願番号2020-17158号に基づくもので、ここにその記載内容が参照により組み入れられる。
本開示は、電子部品がはんだを介して被実装部材に配置された電子装置に関する。
従来より、電子部品がはんだを介して被実装部材に配置された電子装置が提案されている(例えば、特許文献1参照)。なお、被実装部材は、例えば、プリント基板等で構成される。電子部品は、裏面側に複数の電極を有するQFN(Quad Flat No leaded packageの略)等で構成され、外形が直方体状とされている。そして、電子部品は、複数の電極がそれぞれはんだを介して被実装部材に接続されている。
また、この電子装置では、はんだに印加される応力を低減してはんだの長寿命化を図れるように、はんだの周囲に、電子部品と被実装部材とを機械的に接続するサイドフィルが配置されている。より詳しくは、この電子装置のサイドフィルは、被実装部材の面方向に対する法線方向において、電子部品の角部を被覆するように配置されている。
また、この電子装置では、はんだに印加される応力を低減してはんだの長寿命化を図れるように、はんだの周囲に、電子部品と被実装部材とを機械的に接続するサイドフィルが配置されている。より詳しくは、この電子装置のサイドフィルは、被実装部材の面方向に対する法線方向において、電子部品の角部を被覆するように配置されている。
しかしながら、上記電子装置では、法線方向において、サイドフィルが電子部品の角部を被覆するように配置されている。この場合、電子部品における被実装部材側と反対側の角部までサイドフィルが配置されると、当該電子部品の角部にサイドフィルに起因して発生する応力が大きくなり易く、電子部品に発生するモーメントが大きくなり易い。このため、電子部品に不具合が発生する可能性がある。
本開示は、電子部品の不具合が発生し難くなる電子装置を提供することを目的とする。
本開示の1つの観点によれば、電子装置は、一面を有する被実装部材と、外形が直方体状とされ、被実装部材の一面と対向する面に複数の電極が形成され、一面上に配置される電子部品と、電子部品の電極と被実装部材との間に配置され、電極と被実装部材とを電気的、機械的に接続するはんだと、はんだの周囲に配置され、電子部品と被実装部材とを機械的に接続するサイドフィルと、を備え、サイドフィルは、電子部品における被実装部材側と反対側の角部が露出するように配置されている。
これによれば、電子部品における被実装部材側と反対側の角部がサイドフィルで被覆されている場合と比較して、当該電子部品の角部にサイドフィルに起因して発生する応力が大きくなることを抑制でき、電子部品に発生するモーメントが大きくなることを抑制できる。このため、電子部品に不具合が発生することを抑制できる。
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
以下、本開示の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、同一符号を付して説明を行う。
(第1実施形態)
第1実施形態の電子装置について、図面を参照しつつ説明する。なお、本実施形態では、GNSS(Global Navigation Satellite Systemの略)およびIMU(Inertial Measurement Unitの略)を備える自己位置推定システムを構成する電子装置について説明する。また、本実施形態の電子装置は、例えば、日本政府や米国運輸省道路交通安全局(NHTSA:National Highway Traffic Safety Administration)が定義する自動化のレベルにおいて、レベル3以上の運転支援装置が備えられる車両に搭載されると好適である。
第1実施形態の電子装置について、図面を参照しつつ説明する。なお、本実施形態では、GNSS(Global Navigation Satellite Systemの略)およびIMU(Inertial Measurement Unitの略)を備える自己位置推定システムを構成する電子装置について説明する。また、本実施形態の電子装置は、例えば、日本政府や米国運輸省道路交通安全局(NHTSA:National Highway Traffic Safety Administration)が定義する自動化のレベルにおいて、レベル3以上の運転支援装置が備えられる車両に搭載されると好適である。
電子装置は、図1~図3に示されるように、被実装部材としてのプリント基板10に電子部品20が配置された構成とされている。なお、図2では、理解をし易くするため、後述する絶縁膜15およびサイドフィル40を省略して示し、絶縁膜15に被覆される配線パターン11等も実線で示してある。また、図3では、電子部品20の断面構成を簡略化して示している。そして、以下では、プリント基板10における面方向の一方向をx軸方向とし、面方向におけるx軸方向と直交する方向をy軸方向とし、x軸方向およびy軸方向と直交する方向をz軸方向として説明する。
本実施形態のプリント基板10は、一面10a側に配線パターン11および当該配線パターン11と接続されるランド11aが形成されると共に他面10b側に配線パターン12が形成され、内部に配線層13が形成された多層配線基板とされている。そして、一面10a側に形成された配線パターン11、他面10b側に形成された配線パターン12、内部に形成された配線層13は、貫通ビア14を介して適宜接続されている。なお、このようなプリント基板10は、例えば、ガラスエポキシ基板等を用いて構成される。
また、プリント基板10には、一面10a側に絶縁膜15が形成されていると共に、他面10b側に絶縁膜16が形成されている。なお、絶縁膜15、16は、それぞれソルダーレジスト等で構成される。そして、一面10a側に形成された絶縁膜15には、電子部品20と接続されるランド11aを露出させるコンタクトホール15aが形成されている。
なお、図2では、プリント基板10の面方向に対する法線方向(すなわち、z軸方向)において、電子部品20の周囲に形成される配線パターン11を省略して示している。但し、実際には、配線パターン11は、電子部品20が接続されるランド11aと接続されるように形成されている。
電子部品20は、本実施形態では、慣性力を検出する慣性力センサを備える構成とされている。具体的には、電子部品20は、x軸方向の加速度を検出する加速度センサ、y軸方向の加速度を検出する加速度センサ、z軸方向の加速度を検出する加速度センサを備えている。また、電子部品20は、本実施形態では、x軸方向周りの角速度を検出する角速度センサ、y軸方向周りの角速度を検出する角速度センサ、z軸方向周りの角速度を検出する角速度センサを備えている。つまり、本実施形態の電子部品20は、いわゆるIMUとされている。
そして、本実施形態の電子部品20は、具体的な構成については省略するが、QFNとされており、ケース21内に各加速度センサや各角速度センサが収容されて構成されている。ケース21は、外形が直方体状とされており、一面201、一面201と反対側の他面202、一面201と他面202との間を繋ぐ4つの側面203を有している。なお、ここでの直方体状とは、立方体状も含むものである。また、ここでの直方体状とは、一面201と隣合う2つの側面203との交点となる角部や、他面202と隣合う2つの側面203との交点となる角部等に微小な湾曲部が形成されているものを含むものである。また、ケース21は、他面202を含む面に、ケース21に収容されている各加速度センサや各角速度センサと電気的に接続される複数の電極22が形成されている。本実施形態では、複数の電極22は、それぞれ各側面203から他面202に渡るように形成されている。
そして、電子部品20は、プリント基板10に形成されているランド11aと各電極22がはんだ30を介して電気的、機械的に接続されている。本実施形態では、電子部品20は、各側面203がx軸方向またはy軸方向と平行となるように配置されている。
また、はんだ30の周囲には、エポキシ系の樹脂で構成されるサイドフィル40がプリント基板10と電子部品20とを機械的に接続するように配置されている。つまり、電子部品20は、はんだ30およびサイドフィル40を介してプリント基板10に機械的に接続されている。
ここで、本実施形態におけるサイドフィル40について、図3~図5を参照しつつ具体的に説明する。なお、図5は、電子部品20の側面203の1つに対する法線方向から視た模式図であるが、プリント基板10を当該1つの側面203に対応する部分の断面図で示している。また、図5では、各電極22とランド11aとの間に配置されるはんだ30を省略して示している。
本実施形態では、サイドフィル40は、z軸方向において、電子部品20の各側面203と機械的に接続されるように4つ配置されていると共に、4つのサイドフィル40が互いに離れて配置されている。本実施形態では、電子部品20は、各側面203から他面202に渡ってそれぞれ6つの電極22が配置されており、各電極22と接続されるようにはんだ30がそれぞれ配置されている。以下では、側面203のプリント基板10における一面10aの面方向に沿った方向を幅方向とする。なお、幅方向とは、言い換えると、側面203における一面201または他面202との境界線に沿った方向ともいえ、図5中では紙面左右方向となる。そして、本実施形態のサイドフィル40は、幅方向における両端部の電極22と接続されるはんだ30を露出させると共に、幅方向における内縁部の電極22と接続されるはんだ30を被覆しつつ、当該はんだ30の間に位置する部分に配置されている。
また、サイドフィル40は、ケース21の側面203に対する法線方向において、幅方向に広がって配置されている。そして、サイドフィル40は、幅方向の両端部が内縁部側に位置する部分より、プリント基板10からの高さ(以下では、単に高さともいう)が低くなる山形状とされている。本実施形態では、サイドフィル40は、側面203に対する法線方向において、最も高さが高くなる部分と一端部との間の長さw1と、最も高さが高くなる部分と他端部との間の長さw2とが等しくされている。つまり、サイドフィル40は、幅方向の中心部に位置する部分の高さが最も高くされている。但し、サイドフィル40は、長さw1と長さw2とが異なっていてもよい。つまり、サイドフィル40は、幅方向の中心と異なる部分の高さが最も高くされていてもよい。
さらに、各サイドフィル40は、電子部品20の中心に対して点対称となるように配置されている。また、各サイドフィル40は、電子部品20の中心を通り、x軸方向に伸びる仮想線に対して線対称となると共に、y軸方向に伸びる仮想線に対して線対称となるように配置されている。
そして、サイドフィル40は、電子部品20のうちのプリント基板10側と反対側の角部(以下では、単に上端角部ともいう)C1が露出するように配置されている。本実施形態では、各側面203と接続されるサイドフィル40は、上記のように幅方向における両端部の電極22と接続されるはんだ30を露出させるように配置されている。また、サイドフィル40は、電子部品20のうちのプリント基板10側の角部(以下では、単に下端角部ともいう)C2も露出するように配置されている。なお、上端角部C1とは、言い換えると、一面201と、隣合う2つの側面203との交点ともいえる。下端角部C2とは、言い換えると、他面202と、隣合う2つの側面203との交点ともいえる。
以上が本実施形態におけるサイドフィル40の構成である。
そして、プリント基板10には、図1および図2に示されるように、チップ抵抗やチップコンデンサ等の外付電子部品51、マイコン52、GNSS用部品53、他の回路部との接続を図るためのソケット54等が搭載されている。さらに、プリント基板10には、外縁部に、アルミ合金等で構成される筐体にプリント基板10をネジ固定するためのネジが挿通されるネジ孔17等が形成されている。
以上が本実施形態における電子装置の構成である。そして、このような電子装置は、例えば、プリント基板10に形成されたネジ孔17にネジが挿通されることで筐体にネジ固定され、金属性の蓋部が電子装置を収容するように筐体に備えられることで車載搭載部品を構成する。そして、この車載搭載部品は、筐体が機械的に固定されることで車両に搭載され、車両の各種制御を実行するのに用いられる。なお、電子装置は、筐体に固定される際や車載搭載部品を構成した後に当該車載搭載部品を車両に搭載する際、プリント基板10が反る可能性がある。つまり、本実施形態の電子装置は、反りが発生し得るプリント基板10上に電子部品20が配置されて構成されている。
以上説明した本実施形態によれば、プリント基板10と電子部品20とを機械的に接続するサイドフィル40が配置されているため、はんだ30の長寿命化を図ることができる。
そして、サイドフィル40は、電子部品20の上端角部C1を露出させるように配置されている。このため、電子部品20の上端角部C1がサイドフィル40で被覆されている場合と比較して、プリント基板10が反った場合等、電子部品20の上端角部C1に発生し得る応力が大きくなることを抑制でき、電子部品20に発生するモーメントが大きくなることを抑制できる。このため、電子部品に不具合が発生することを抑制できる。
特に、本実施形態では、電子部品20がIMUとされており、電子部品20に発生するモーメントが大きくなると、0点変動や軸ずれ等の不具合が発生し易くなる。しかしながら、本実施形態では、サイドフィル40が上記のように配置されているため、0点変動や軸ずれ等の不具合が発生することを抑制できる。つまり、本実施形態の電子装置によれば、電子部品20のロバスト性を向上でき、IMUの検出精度が低下することを抑制できる。そして、電子部品20に0点変動が発生し難いため、電子装置を組付けた後等に0点補正を行う必要がなくなり、調整コストや検査コストの削減を図ることもできる。
また、各サイドフィル40は、幅方向における端部の高さが内縁部の高さより低くされた山形状とされている。このため、例えば、サイドフィル40の高さが幅方向に沿って一定とされている場合と比較して、サイドフィル40の形状を厳密に制御する必要がなくなり、製造工程の簡略化を図ることができる。
さらに、サイドフィル40は、電子部品20の中心に対して点対称に配置されている。また、サイドフィル40は、電子部品20の中心を通り、x軸方向に伸びる仮想線に対して線対称となると共に、y軸方向に伸びる仮想線に対して線対称となるように配置されている。このため、各サイドフィル40から電子部品20に伝搬される応力を均一化し易くできる。つまり、サイドフィル40による応力のバランスを保ち易くなる。したがって、電子部品20に不具合が発生することをさらに抑制できる。
また、本実施形態の電子装置は、上記のように、電子部品20がIMUとされており、自己位置推定システムを構成するのに利用される。そして、電子部品20は、上記のように、軸方向がずれることが抑制されると共に、0点変動が発生することが抑制されるため、6軸の慣性力を高精度に検知できる状態となっている。このため、本実施形態の電子装置では、長時間に渡る車両のデッドレコニング(すなわち、慣性航法)を実現できる。
ここで、上記のようにサイドフィル40を配置することにより、はんだ30の長寿命化を図ることができる。しかしながら、サイドフィル40を配置することにより、プリント基板10と電子部品20とが機械的に接続される部分が増加するため、例えば、プリント基板10が反った場合等には、プリント基板10から電子部品20に伝搬される応力が増加する。
具体的には、図6に示されるように、サイドフィル40の配置量が多くなるほど、サイドフィル40に分散される応力が大きくなるため、はんだ30に印加される最大引張応力が小さくなる。このため、サイドフィル40の配置量を多くするほど、はんだ30の長寿命化を図ることができる。なお、ここでのサイドフィル40の配置量とは、プリント基板10と電子部品20とを機械的に接続する部分の量である。そして、サイドフィル40の配置量を多くするとは、プリント基板10と電子部品20とを機械的に接続する部分を多くすることである。
一方、図7に示されるように、サイドフィル40の配置量が多くなるほど、プリント基板10からサイドフィル40を介して電子部品20に応力が伝搬され易くなるため、電子部品20に印加される平均ミーゼス応力は大きくなる。したがって、サイドフィル40は、上記の構成としつつ、用途に応じて配置量が設定されることが好ましい。
(第1実施形態の変形例)
上記第1実施形態において、サイドフィル40の形状は適宜変更可能である。例えば、各サイドフィル40は、図8A~図8Cに示されるように配置されていてもよい。すなわち、各サイドフィル40は、プリント基板10に対する法線方向において、幅方向における両端部の2つの電極22と接続されるはんだ30を露出させつつ、幅方向における内縁部の2つの電極22と接続されるはんだ30を被覆するように配置されていてもよい。この場合、図8A~図8Cに示されるように、サイドフィル40の幅方向における長さは、適宜変更可能である。また、特に図示しないが、電子部品20の電極22の一部は、ケース21内に収容される慣性力センサと電気的に接続されない場合もある。この場合、サイドフィル40は、慣性力センサと電気的に接続されない電極22と接続されるはんだ30を露出させるように配置されていてもよい。つまり、サイドフィル40は、仮にはんだ30が破壊されたとしても、電子部品20とプリント基板10との電気的な接続に影響がないはんだ30を露出させるように配置されていてもよい。さらに、図8Dに示されるように、各サイドフィル40は、各電極22と接続されるはんだ30を全て被覆するように配置されていてもよい。
上記第1実施形態において、サイドフィル40の形状は適宜変更可能である。例えば、各サイドフィル40は、図8A~図8Cに示されるように配置されていてもよい。すなわち、各サイドフィル40は、プリント基板10に対する法線方向において、幅方向における両端部の2つの電極22と接続されるはんだ30を露出させつつ、幅方向における内縁部の2つの電極22と接続されるはんだ30を被覆するように配置されていてもよい。この場合、図8A~図8Cに示されるように、サイドフィル40の幅方向における長さは、適宜変更可能である。また、特に図示しないが、電子部品20の電極22の一部は、ケース21内に収容される慣性力センサと電気的に接続されない場合もある。この場合、サイドフィル40は、慣性力センサと電気的に接続されない電極22と接続されるはんだ30を露出させるように配置されていてもよい。つまり、サイドフィル40は、仮にはんだ30が破壊されたとしても、電子部品20とプリント基板10との電気的な接続に影響がないはんだ30を露出させるように配置されていてもよい。さらに、図8Dに示されるように、各サイドフィル40は、各電極22と接続されるはんだ30を全て被覆するように配置されていてもよい。
さらに、各サイドフィル40における最も高い部分の高さは、適宜変更可能である。例えば、図9Aに示されるように、サイドフィル40は、高さが一面201に達するように形成されていてもよい。また、図9Bに示されるように、サイドフィル40は、はんだ30とほぼ同じ高さとされていてもよい。さらに、図9Cに示されるように、サイドフィル40の外面は、直線状ではなく、曲面状とされていてもよい。なお、図9A~図9Cは、図2中のIII-III断面に相当する断面図である。
(第2実施形態)
第2実施形態について説明する。本実施形態は、第1実施形態に対し、サイドフィル40の形状を変更したものである。その他に関しては、第1実施形態と同様であるため、ここでは説明を省略する。
第2実施形態について説明する。本実施形態は、第1実施形態に対し、サイドフィル40の形状を変更したものである。その他に関しては、第1実施形態と同様であるため、ここでは説明を省略する。
本実施形態では、図10に示されるように、サイドフィル40は、ケース21の側面203に配置された部分同士が繋がって配置されている。但し、ケース21の側面203に配置されたサイドフィル40同士は、電子部品20の下端角部C2近傍で繋がっており、上端角部C1は露出した状態となっている。なお、本実施形態では、電子部品20の下端角部C2は、サイドフィル40で被覆されていてもよいし、サイドフィル40から露出していてもよい。
以上説明した本実施形態によれば、サイドフィル40は、ケース21の側面203に配置された部分同士が繋がっている。このため、ケース21の側面203に配置されたサイドフィル40が互いに繋がらないようにするための詳細な制御が不要となり、製造工程の簡略化を図ることができる。
(他の実施形態)
本開示は、実施形態に準拠して記述されたが、本開示は当該実施形態や構造に限定されるものではないと理解される。本開示は、様々な変形例や均等範囲内の変形をも包含する。加えて、様々な組み合わせや形態、さらには、それらに一要素のみ、それ以上、あるいはそれ以下、を含む他の組み合わせや形態をも、本開示の範疇や思想範囲に入るものである。
本開示は、実施形態に準拠して記述されたが、本開示は当該実施形態や構造に限定されるものではないと理解される。本開示は、様々な変形例や均等範囲内の変形をも包含する。加えて、様々な組み合わせや形態、さらには、それらに一要素のみ、それ以上、あるいはそれ以下、を含む他の組み合わせや形態をも、本開示の範疇や思想範囲に入るものである。
例えば、上記各実施形態において、被実装部材としてのプリント基板10は、ガラスエポキシ基板ではなく、セラミックス基板等で構成されていてもよい。
また、上記各実施形態において、電子部品20は、3つの加速度センサと3つの角速度センサを備えていなくてもよい。例えば、電子部品20は、2つ以下の加速度センサを有する構成とされていてもよいし、2つ以下の角速度センサを有する構成とされていてもよい。また、電子部品20は、加速度センサのみで構成されていてもよいし、角速度センサのみで構成されていてもよい。さらに、電子部品20は、加速度や角速度と異なる物理量を検出する物理量センサを有する構成とされていてもよい。この場合、電子部品20は、この物理量センサのみを有する構成とされていてもよいし、この物理量センサと、加速度センサおよび角速度センサの少なくとも一方を有する構成とされていてもよい。さらに、電子部品20は、加速度や角速度を含む物理量を検出するセンサを備えず、コンデンサや抵抗等が配置された構成とされていてもよい。
さらに、上記各実施形態において、電子部品20は、他面202を含む面に電極22が配置されるのであれば、QFNとされていなくてもよい。例えば、電子部品20は、SON(Small Outline Non-leaded packageの略)、VSON(Very-thin Small Outline Non-leaded packageの略)、TQFN(Thin-Quad Flat No-Lead Plastic packageの略)、LCC(Leaded Chip Carrierの略)、CLCC(ceramic leaded chip carrierの略)、DFN(Dual Flat packageの略)、QFI(Quad Flat I-leaded packageの略)、BGA(Ball Grid Arrayの略)、EBGA(Enhanced BGAの略)、FTBGA(Flex Tape BGAの略)、TFBGA(Thin & Fine-Pitch Ball Grid Arrayの略)等とされていてもよい。
そして、上記各実施形態において、サイドフィル40は、点対称および線対称の一方の対称構成となるように配置されていてもよい。なお、サイドフィル40が線対称に配置される場合には、x軸方向に伸びる仮想線およびy軸方向に伸びる仮想線の一方に対して線対称となるように配置されていてもよい。さらに、サイドフィル40は、点対称および線対称となるように配置されていなくてもよい。
また、上記各実施形態において、プリント基板10と電子部品20の他面202との間にアンダーフィルが配置されていてもよい。
Claims (6)
- 被実装部材(10)にはんだ(30)を介して電子部品(20)が配置された電子装置であって、
一面(10a)を有する前記被実装部材と、
外形が直方体状とされ、前記被実装部材の一面と対向する面(202)に複数の電極(22)が形成され、前記一面上に配置される前記電子部品と、
前記電子部品の電極と前記被実装部材との間に配置され、前記電極と前記被実装部材とを電気的、機械的に接続する前記はんだと、
前記はんだの周囲に配置され、前記電子部品と前記被実装部材とを機械的に接続するサイドフィル(40)と、を備え、
前記サイドフィルは、前記電子部品における前記被実装部材側と反対側の角部(C1)が露出するように配置されている電子装置。 - 前記サイドフィルは、前記電子部品の側面に対する法線方向において、前記被実装部材の面方向に沿った方向を幅方向とすると、前記幅方向の両端部側に位置する部分が前記幅方向における内縁部側に位置する部分より、前記被実装部材からの高さが低くなっている請求項1に記載の電子装置。
- 前記サイドフィルは、前記電子部品の中心に対して点対称、および前記電子部品の中心を通る仮想線に対して線対称の少なくとも一方の対称構成となるように配置されている請求項1または2に記載の電子装置。
- 前記電子部品は、一面(201)、前記一面と反対側であり、前記電極が形成される他面(202)、前記一面と前記他面との間を繋ぐ4つの側面(203)を有する前記直方体状とされ、
前記サイドフィルは、前記被実装部材の一面に対する法線方向において、前記4つの側面と機械的に接続されるように配置されていると共に、それぞれの前記側面と接続される部分同士が離れている請求項1ないし3のいずれか1つに記載の電子装置。 - 前記電子部品は、一面(201)、前記一面と反対側であり、前記電極が形成される他面(202)、前記一面と前記他面との間を繋ぐ4つの側面(203)を有する前記直方体状とされ、
前記サイドフィルは、前記被実装部材の一面に対する法線方向において、前記4つの側面と機械的に接続されるように配置されていると共に、それぞれの前記側面と接続される部分同士が繋がっている請求項1ないし3のいずれか1つに記載の電子装置。 - 前記電子部品は、慣性力を検出する慣性力センサを有している請求項1ないし5のいずれか1つに記載の電子装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202180012063.7A CN115024026A (zh) | 2020-02-04 | 2021-02-03 | 电子装置 |
| US17/878,319 US20220369463A1 (en) | 2020-02-04 | 2022-08-01 | Electronic device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020-017158 | 2020-02-04 | ||
| JP2020017158A JP7283407B2 (ja) | 2020-02-04 | 2020-02-04 | 電子装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/878,319 Continuation US20220369463A1 (en) | 2020-02-04 | 2022-08-01 | Electronic device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021157629A1 true WO2021157629A1 (ja) | 2021-08-12 |
Family
ID=77199617
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/003999 WO2021157629A1 (ja) | 2020-02-04 | 2021-02-03 | 電子装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20220369463A1 (ja) |
| JP (1) | JP7283407B2 (ja) |
| CN (1) | CN115024026A (ja) |
| WO (1) | WO2021157629A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7310598B2 (ja) * | 2019-12-25 | 2023-07-19 | 株式会社デンソー | 電子装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009021465A (ja) * | 2007-07-13 | 2009-01-29 | Panasonic Corp | 半導体装置実装構造体およびその製造方法ならびに半導体装置の剥離方法 |
| WO2012160817A1 (ja) * | 2011-05-26 | 2012-11-29 | パナソニック株式会社 | 電子部品実装方法、電子部品搭載装置および電子部品実装システム |
| JP2013102167A (ja) * | 2012-12-10 | 2013-05-23 | Panasonic Corp | 半導体装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0870063A (ja) * | 1994-08-29 | 1996-03-12 | Toshiba Lighting & Technol Corp | 混成集積回路およびこれを含む回路装置 |
| JP2001308145A (ja) * | 2000-04-25 | 2001-11-02 | Fujitsu Ltd | 半導体チップの実装方法 |
| JP2005502187A (ja) * | 2001-05-04 | 2005-01-20 | ノキア コーポレイション | 電子部品組立体の熱機械的信頼性を向上するためにパッケージレベルで予め塗布されるアンダーフィル |
| JP2007035692A (ja) * | 2005-07-22 | 2007-02-08 | Matsushita Electric Ind Co Ltd | 電子部品実装構造および電子部品実装方法 |
| KR101035560B1 (ko) * | 2008-09-23 | 2011-05-19 | 한국전자통신연구원 | 서비스 제공 시스템 및 그 방법 |
| US20110108997A1 (en) * | 2009-04-24 | 2011-05-12 | Panasonic Corporation | Mounting method and mounting structure for semiconductor package component |
| JP4676012B2 (ja) * | 2009-06-03 | 2011-04-27 | 株式会社東芝 | 電子機器 |
| JP2014110369A (ja) * | 2012-12-04 | 2014-06-12 | Seiko Epson Corp | ベース基板、振動子、発振器、センサー、電子デバイス、電子機器、および移動体 |
| AT515071B1 (de) * | 2013-09-03 | 2019-03-15 | Zkw Group Gmbh | Verfahren zum positionsstabilen Verlöten |
-
2020
- 2020-02-04 JP JP2020017158A patent/JP7283407B2/ja active Active
-
2021
- 2021-02-03 WO PCT/JP2021/003999 patent/WO2021157629A1/ja active Application Filing
- 2021-02-03 CN CN202180012063.7A patent/CN115024026A/zh active Pending
-
2022
- 2022-08-01 US US17/878,319 patent/US20220369463A1/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009021465A (ja) * | 2007-07-13 | 2009-01-29 | Panasonic Corp | 半導体装置実装構造体およびその製造方法ならびに半導体装置の剥離方法 |
| WO2012160817A1 (ja) * | 2011-05-26 | 2012-11-29 | パナソニック株式会社 | 電子部品実装方法、電子部品搭載装置および電子部品実装システム |
| JP2013102167A (ja) * | 2012-12-10 | 2013-05-23 | Panasonic Corp | 半導体装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220369463A1 (en) | 2022-11-17 |
| CN115024026A (zh) | 2022-09-06 |
| JP2021125523A (ja) | 2021-08-30 |
| JP7283407B2 (ja) | 2023-05-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100779352B1 (ko) | 각속도 센서 | |
| JP4701505B2 (ja) | 慣性トランスデューサ | |
| US20060219008A1 (en) | Angular velocity sensor | |
| JP2009264820A (ja) | 慣性力センサ | |
| JP2019095317A (ja) | センサーユニット、センサーユニットの製造方法、慣性計測装置、電子機器、および移動体 | |
| WO2021157629A1 (ja) | 電子装置 | |
| US6829953B2 (en) | Capacitive sensor | |
| JP2006229121A (ja) | 圧電デバイス及び圧電装置並びに電子機器 | |
| JP2907127B2 (ja) | マルチチップモジュール | |
| US20220353996A1 (en) | Electronic device | |
| JP7310598B2 (ja) | 電子装置 | |
| JP2006112856A (ja) | センサ素子基板、センサ素子基板の製造方法、センサ | |
| US20070062281A1 (en) | Angular velocity sensor | |
| WO2003086035A1 (fr) | Dispositif a carte de circuits imprimes pour appareil d'information, carte modulaire multicouche et navigateur | |
| JP5695292B2 (ja) | センサデバイス | |
| US20230243866A1 (en) | Multi-axis inertial force sensor | |
| US20220099698A1 (en) | Inertial measurement unit | |
| US20240093997A1 (en) | Inertial Measurement Device | |
| US20240093994A1 (en) | Inertial Measurement Device | |
| CN114814288A (zh) | 传感器模块 | |
| WO2020145076A1 (ja) | 半導体装置およびその製造方法 | |
| JP5268058B2 (ja) | 電子部品セット及び電子部品パッケージ | |
| CN118043280A (zh) | 气密封装元件以及元件模块 | |
| JP2023154802A (ja) | 慣性計測装置 | |
| JP2024058762A (ja) | 慣性計測装置、及び慣性計測装置の製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21750814 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21750814 Country of ref document: EP Kind code of ref document: A1 |