WO2021153540A1 - モータ - Google Patents
モータ Download PDFInfo
- Publication number
- WO2021153540A1 WO2021153540A1 PCT/JP2021/002569 JP2021002569W WO2021153540A1 WO 2021153540 A1 WO2021153540 A1 WO 2021153540A1 JP 2021002569 W JP2021002569 W JP 2021002569W WO 2021153540 A1 WO2021153540 A1 WO 2021153540A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- motor
- resolver
- bearing
- rotor
- housing
- Prior art date
Links
Images












Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K24/00—Machines adapted for the instantaneous transmission or reception of the angular displacement of rotating parts, e.g. synchro, selsyn
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/21—Devices for sensing speed or position, or actuated thereby
- H02K11/225—Detecting coils
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B15/00—Systems controlled by a computer
- G05B15/02—Systems controlled by a computer electric
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/02—Details of the magnetic circuit characterised by the magnetic material
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/18—Means for mounting or fastening magnetic stationary parts on to, or to, the stator structures
- H02K1/185—Means for mounting or fastening magnetic stationary parts on to, or to, the stator structures to outer stators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/30—Structural association with control circuits or drive circuits
- H02K11/33—Drive circuits, e.g. power electronics
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/14—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures
- H02K21/16—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures having annular armature cores with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/12—Casings or enclosures characterised by the shape, form or construction thereof specially adapted for operating in liquid or gas
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/12—Casings or enclosures characterised by the shape, form or construction thereof specially adapted for operating in liquid or gas
- H02K5/124—Sealing of shafts
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/12—Casings or enclosures characterised by the shape, form or construction thereof specially adapted for operating in liquid or gas
- H02K5/128—Casings or enclosures characterised by the shape, form or construction thereof specially adapted for operating in liquid or gas using air-gap sleeves or air-gap discs
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/16—Means for supporting bearings, e.g. insulating supports or means for fitting bearings in the bearing-shields
- H02K5/173—Means for supporting bearings, e.g. insulating supports or means for fitting bearings in the bearing-shields using bearings with rolling contact, e.g. ball bearings
- H02K5/1732—Means for supporting bearings, e.g. insulating supports or means for fitting bearings in the bearing-shields using bearings with rolling contact, e.g. ball bearings radially supporting the rotary shaft at both ends of the rotor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/16—Means for supporting bearings, e.g. insulating supports or means for fitting bearings in the bearing-shields
- H02K5/173—Means for supporting bearings, e.g. insulating supports or means for fitting bearings in the bearing-shields using bearings with rolling contact, e.g. ball bearings
- H02K5/1737—Means for supporting bearings, e.g. insulating supports or means for fitting bearings in the bearing-shields using bearings with rolling contact, e.g. ball bearings radially supporting the rotor around a fixed spindle; radially supporting the rotor directly
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/08—Structural association with bearings
- H02K7/083—Structural association with bearings radially supporting the rotary shaft at both ends of the rotor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/08—Structural association with bearings
- H02K7/086—Structural association with bearings radially supporting the rotor around a fixed spindle; radially supporting the rotor directly
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2213/00—Specific aspects, not otherwise provided for and not covered by codes H02K2201/00 - H02K2211/00
- H02K2213/03—Machines characterised by numerical values, ranges, mathematical expressions or similar information
Definitions
- the present invention relates to a motor.
- Patent Documents 1 to 3 describe motors used in a vacuum atmosphere or the like.
- a partition wall is provided between the motor rotor and the motor stator. The partition wall blocks the space in which the motor rotor is arranged and the space in which the motor stator is arranged.
- Patent Document 1 when a motor is used in a vacuum and high temperature environment in a semiconductor manufacturing process or the like, it is required to suppress dust generation and gas generation from the motor.
- the motor described in Patent Document 1 is a so-called outer rotor type, and the motor rotor is provided on the vacuum atmosphere side (inside the chamber). Therefore, dust and gas generated from the motor rotor may flow out to the vacuum atmosphere side.
- bearings are provided on the outer circumference of the motor rotor or the output shaft connected to the motor rotor. Therefore, the bearing may be exposed to the vacuum atmosphere side, and dust generated from the bearing may flow out to the vacuum side.
- the present invention has been made in view of the above problems, and an object of the present invention is to provide a motor capable of suppressing the outflow of dust to the outside.
- the motor includes a housing base, a housing shaft portion provided on the housing base and extending in a direction along a rotation center axis, and a housing including a housing shaft portion.
- a motor stator arranged on the radial outer side of the housing shaft portion, a motor rotor provided between the motor stator and the housing shaft portion, and a motor rotor provided on the radial inner side of the motor rotor, and the motor rotor is mounted on the housing shaft portion.
- a bearing that rotatably supports the portion and a bearing provided on the side opposite to the housing base in the axial direction of the motor rotor (for example, the output shaft 17 side in the embodiment) are provided to seal between the motor rotor and the housing shaft portion. It has a seal structure and a resolver that detects the rotation of the motor rotor, and the resolver is radially outside the bearing and in a direction along the rotation center axis, and is more than the motor stator. It is provided on the side opposite to the housing base in the axial direction (for example, the output shaft 17 side in the embodiment).
- the bearing is provided inside the motor rotor in the radial direction. Since the output shaft side of the motor rotor is sealed with a lid or the like during use, it is possible to prevent dust generated from the bearing from flowing out to the outside, for example, to the vacuum atmosphere side. Further, even when the metal powder generated due to the wear of the bearing wraps around inside the motor, the metal powder is adsorbed on the motor stator. Therefore, the motor can prevent the dust generated inside from flowing out to the outside. Further, since the outflow of metal powder to the resolver side is suppressed, it is possible to suppress a decrease in the detection accuracy of the resolver.
- the motor partition wall can prevent the gas on the atmospheric atmosphere side where the motor stator is arranged from flowing out to the vacuum atmosphere side where the motor rotor is arranged.
- the resolver has a resolver rotor connected to the motor rotor and a resolver stator provided on the radial outer side of the resolver rotor and having an exciting coil, and the resolver rotor and the resolver stator.
- a resolver partition is provided between the and. According to this, the space where the resolver rotor is arranged and the space where the resolver stator is arranged are separated by the resolver partition wall, and the gas on the atmosphere side where the resolver stator is arranged is on the vacuum atmosphere side where the resolver rotor is arranged. It is possible to suppress the outflow to. Further, a resolver is used as an angle detector, and no electronic element is arranged in the motor. Therefore, even when the motor is used in a high temperature environment, the angle can be detected satisfactorily.
- the outer diameter of the motor rotor is smaller than the outer diameter of the resolver rotor. According to this, the rotating structure including the motor rotor and the resolver rotor can be integrally pulled out from the output shaft side, so that the bearing can be easily replaced and maintained.
- the bearing is unlubricated and has an inner ring provided on the housing shaft, an outer ring provided on the motor rotor, and a rolling element provided between the inner ring and the outer ring.
- the inner ring, the outer ring, and the rolling element at least the rolling element is made of ceramics. According to this, it is possible to suppress dust generation due to wear and gas generation in a high temperature environment from the rolling elements of the bearing.
- the bearing is unlubricated and has an inner ring provided on the housing shaft, an outer ring provided on the motor rotor, and a rolling element provided between the inner ring and the outer ring.
- a magnetic iron-based member is used for the inner ring and the outer ring.
- a connecting portion made of a magnetic material is arranged between the motor stator and the resolver in a direction along the central axis. According to this, since the connecting portion can shield the magnetic force (magnetic field) generated from the motor stator, the detection accuracy of the resolver can be improved. Further, the connecting portion can adsorb the metal powder generated by the wear.
- an outer ring holding portion provided on the side opposite to the housing base in the axial direction of the motor rotor (for example, the output shaft 17 side in the embodiment) and fixed to the outer ring of the bearing, and the housing shaft portion.
- the seal structure includes an inner ring holding portion provided on the side opposite to the housing base (for example, the output shaft 17 side in the embodiment) and fixed to the inner ring of the bearing in the axial direction of the bearing. It has a labyrinth structure formed by a portion and the inner ring holding portion. According to this, dust generated from the motor due to wear of the bearing or the like is shielded by the seal structure and can be suppressed from flowing out to the outside.
- the motor stator is arranged in a space on the atmosphere side of the space in which the motor rotor is arranged. According to this, the cooling efficiency of the motor stator can be improved as compared with the case where the motor stator is arranged in the same space as the motor rotor, for example, in a vacuum atmosphere.
- the motor rotor includes a samarium-cobalt permanent magnet. According to this, even when the motor is used in a high temperature environment, it is not demagnetized, so that the motor rotor can be satisfactorily driven to rotate.
- a motor control circuit that supplies a drive current to the exciting coil of the motor stator based on the detection signal of the resolver. According to this, the motor control circuit can constantly monitor the rotational torque and the speed ripple based on the detection signal of the resolver. Thereby, for example, the occurrence of an abnormality in the bearing can be detected at an early stage, or the replacement time of the bearing can be grasped.
- FIG. 1 is an explanatory diagram illustrating a usage state of the motor according to the embodiment.
- FIG. 2 is a cross-sectional view schematically showing the motor according to the embodiment.
- FIG. 3 is a cross-sectional view taken along the line III-III'of FIG.
- FIG. 4 is an enlarged cross-sectional view showing the first bearing of the motor according to the embodiment.
- FIG. 5 is an enlarged cross-sectional view showing a motor stator, a motor rotor, and a motor partition wall included in the motor according to the embodiment.
- FIG. 6 is an enlarged cross-sectional view showing the resolver and the resolver partition wall of the motor according to the embodiment.
- FIG. 7 is a cross-sectional view schematically showing the configuration of an incremental resolver included in the motor according to the embodiment.
- FIG. 8 is a block diagram showing a configuration example of a signal processing circuit included in the motor control circuit.
- FIG. 9 is a flowchart for explaining a method of driving the incremental resolver and the absolute resolver.
- FIG. 10 is a cross-sectional view schematically showing the motor according to the first modification.
- FIG. 11 is a plan view schematically showing a part of the motor according to the second modification.
- FIG. 12 is a plan view schematically showing a part of a motor provided with a motor winding.
- FIG. 13 is an enlarged cross-sectional view of the first bearing of the motor according to the third modification.
- FIG. 14 is an enlarged cross-sectional view of the first bearing of the motor according to the fourth modification.
- FIG. 1 is an explanatory diagram illustrating a usage state of the motor according to the embodiment.
- the semiconductor manufacturing apparatus 100 includes a chamber 101, a motor 1, a motor control circuit 90, a control device 99, and a transfer device 110.
- the motor 1 rotationally drives the output shaft 17 (see FIG. 2) around the rotation center shaft AX.
- the transfer device 110 including the transfer table 111 is arranged inside the chamber 101 and is connected to the motor 1 through the opening 102.
- the semiconductor manufacturing apparatus 100 rotates the transfer table 111 by driving the motor 1.
- the semiconductor manufacturing apparatus 100 mounts the work (object to be transported) 120 in the vacuum atmosphere Va on the transport table 111 and moves it.
- the work 120 is, for example, a semiconductor substrate, a workpiece, a tool, or the like.
- the motor 1 can directly transmit the rotational force to the transfer table 111 and the work 120 without interposing a transmission mechanism such as a gear, a belt or a roller, and rotate the work 120.
- the motor 1 is a so-called direct drive motor.
- the axial direction is a direction along the rotation center axis AX.
- the control device 99 includes an input circuit, a CPU (Central Processing Unit) which is a central processing unit, a memory which is a storage device, and an output circuit (all not shown).
- the control device 99 generates a motor rotation command i that controls the motor 1 according to the program stored in the memory, and outputs the motor rotation command i to the motor control circuit 90.
- a CPU Central Processing Unit
- the control device 99 generates a motor rotation command i that controls the motor 1 according to the program stored in the memory, and outputs the motor rotation command i to the motor control circuit 90.
- the motor control circuit 90 When the motor rotation command i is input from the control device 99, the motor control circuit 90 outputs a drive signal from the CPU (Central Processing Unit) 91 to a three-phase amplifier (hereinafter referred to as AMP (Amplifier) 92), and the AMP 92.
- the drive current Mi is supplied to the motor 1.
- the motor 1 is rotationally driven by the drive current Mi to rotate the transfer table 111.
- the transport device 110 may have other members such as an arm for transporting wafers in addition to the transport table 111, and a configuration suitable for the work 120 can be appropriately adopted.
- a detection signal (resolver signal) Sr is output from an angle detector such as the resolver 60 (see FIG. 2) that has detected the rotation angle.
- the motor control circuit 90 digitally converts the detection signal Sr with a resolver digital converter (hereinafter referred to as RDC (Resolver to Digital Converter) 93). Based on the digital information of the detection signal Sr from the RDC 93, the CPU 91 determines whether or not the work 120 has reached the command position, and when the work 120 reaches the command position, the drive signal to the AMP 92 is stopped.
- RDC resolver digital converter
- the motor control circuit 90 can constantly monitor the rotational torque and the speed ripple based on the detection signal Sr of the resolver 60. As a result, the motor control circuit 90 can detect, for example, the occurrence of an abnormality in the first bearing 21A and the second bearing 21B shown in FIG. 2 at an early stage, or replace the first bearing 21A and the second bearing 21B. You can know the time.
- the degree of integration of semiconductors is increasing, and at the same time, the density is being increased by miniaturizing the pattern width of ICs.
- a high degree of uniformity with respect to wafer quality is required.
- the inside of the chamber 101 is a vacuum atmosphere Va.
- the inside of the chamber 101 is not limited to the vacuum environment, and may be an atmosphere different from the atmospheric atmosphere At, such as a reduced pressure environment or a process gas filling environment such as nitrogen gas or rare gas.
- a vacuum and high temperature environment such as a diffusion furnace used for semiconductor manufacturing can be applied.
- the "atmosphere side” is a space having a higher pressure than the "vacuum side" (vacuum atmosphere Va).
- the "atmosphere side” may be a space in which the ratio of the process gas is lower than that of the "vacuum side” (vacuum atmosphere Va).
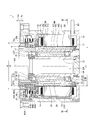
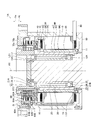
- FIG. 2 is a cross-sectional view schematically showing the motor according to the embodiment.
- FIG. 3 is a cross-sectional view taken along the line III-III'of FIG. Note that FIG. 2 is a cross-sectional view when the motor 1 is cut on a virtual plane including the rotation center axis AX.
- the direction along the rotation center axis AX toward the output shaft 17 side may be referred to as "upper side” or simply “upper side”.
- the direction along the rotation center axis AX toward the housing base 11 side may be expressed as “lower side” or simply "lower side”.
- each component of FIGS. 2 to 14 are shown schematically with emphasis for ease of understanding.
- the motor partition wall 50 is shown thicker than it actually is.
- the sizes of the gap G0 and the first gap G1 to the fourth gap G4 are shown to be larger than the actual size, the gap G0 and the first gap G1 to the fourth gap G4 are both formed as minute gaps. There is.
- the motor 1 includes a housing 10, a motor stator 30, a motor rotor 40, a first bearing 21A, a second bearing 21B, a resolver 60, a motor partition wall 50, a resolver partition wall 70, and the like. It has a connecting portion 15 and an output shaft 17.
- FIGS. 2 and 3 the overall arrangement relation of each component is described, and the detailed connection structure between each component and the seal structure will be described later.
- the housing 10 includes a housing base 11, a housing shaft portion 12, a housing outer 13, and a lid portion 14.
- the housing base 11 is a flat plate-shaped member extending in a direction intersecting the rotation center axis AX, and is formed in an annular shape having an opening at a position overlapping the rotation center axis AX.
- the housing shaft portion 12 and the housing outer 13 are tubular members extending in a direction (hereinafter, referred to as an axial direction) along the rotation center axis AX, respectively.
- the lower end of the housing shaft portion 12 is connected to the inner peripheral edge side of the housing base 11, and the lower end of the housing outer 13 is connected to the outer peripheral edge side of the housing base 11. That is, the housing outer 13 is arranged so as to face the radial outer side of the housing shaft portion 12 in the radial direction.
- the lid portion 14 is provided so as to cover the opening of the housing base 11.
- the lid portion 14 blocks the internal space SP of the housing shaft portion 12 from the atmospheric atmosphere At, and suppresses the inflow of foreign matter into the internal space SP.
- the housing shaft portion 12 and the lid portion 14 Since a part of the housing base 11, the housing shaft portion 12 and the lid portion 14 is exposed to vacuum, the amount of gas released in vacuum is small, such as austenitic stainless steel and aluminum alloy, and the components of the released gas are known. Vacuum materials can be used. Further, depending on the degree of vacuum to be applied, it is more preferable to reduce the surface area and reduce the release of dissolved gas by performing surface treatment such as electrolytic polishing, smoothing treatment, and oxide film. In the present embodiment, the housing outer 13 is exposed to the atmospheric atmosphere At and not in a vacuum. Therefore, a general structural material such as cast iron or low carbon steel may be used, and of course, stainless steel is used. May be good. With this structure, the motor 1 can increase the ratio of the use of the structural material and reduce the amount of the vacuum material used, which is more expensive than the structural material.
- the motor stator 30, the motor rotor 40, the first bearing 21A, the second bearing 21B, the motor partition wall 50, and the connecting portion 15 are incorporated between the housing shaft portion 12 and the housing outer 13.
- the motor stator 30 is arranged on the radial outer side of the housing shaft portion 12 and the motor rotor 40, and is maintained in a stationary state.
- the connecting portion 15 is provided so as to cover the upper side (resolver 60 side) of the motor stator 30, and the motor stator 30 is fixed to the housing outer 13 via the connecting portion 15.
- the stator core 31 of the motor stator 30 is fastened to the housing 10 (housing outer 13) with bolts.
- the motor stator 30, which is a non-rotating component is positioned and fixed with respect to the housing base 11.
- the motor rotor 40 is provided between the motor stator 30 and the housing shaft portion 12.
- the first bearing 21A and the second bearing 21B rotatably support the motor rotor 40 on the housing shaft portion 12. That is, the motor rotor 40 is rotatably arranged with respect to the motor stator 30.
- the motor stator 30, the motor rotor 40, the first bearing 21A (not shown in FIG. 3) and the second bearing 21B are all annular structures, and are concentric circles about the rotation center axis AX. Placed in. Bearings (first bearing 21A and second bearing 21B), a motor rotor 40, a motor partition wall 50, a motor stator 30, and a housing outer 13 are arranged in this order from the housing shaft portion 12 toward the outer side in the radial direction. That is, the motor 1 is a so-called inner rotor type, and the motor rotor 40 is located closer to the rotation center axis AX than the motor stator 30. In other words, the motor rotor 40 is arranged on the vacuum atmosphere Va side, and the motor stator 30 is arranged on the air atmosphere At side.
- the motor stator 30 is formed by superimposing electromagnetic steel sheets, and includes a stator core 31, an insulator 34 (see FIG. 2), and an exciting coil 35 (see FIG. 2).
- the motor stator 30 is formed of, for example, an adhesive steel plate or an in-mold caulking. As a result, the stator core 31 can be easily processed, and the good magnetic characteristics of the motor stator 30 can be obtained.
- the stator core 31 has a back yoke 32 and teeth 33.
- the back yoke 32 is an annular member, and is arranged so as to face the inner peripheral surface of the housing outer 13 with a space.
- a plurality of teeth 33 are arranged on the back yoke 32 in the circumferential direction and are arranged at equal intervals.
- the motor stator 30 is not limited to such an integrated core, and may be a divided core in which a plurality of divided stator cores 31 are arranged.
- the exciting coil 35 is wound around the teeth 33 of the stator core 31 via the insulator 34, respectively.
- a wiring for supplying electric power from a power source is connected to the motor stator 30, and a drive current Mi is supplied from the motor control circuit 90 to the exciting coil 35 through this wiring.
- the motor winding and the insulator 34 (insulating material) constituting the exciting coil 35 shown in FIG. 2 are both made of a heat-resistant material.
- the motor winding and the insulator 34 (insulating material) have heat resistance of, for example, 200 ° C. or higher.
- the motor winding is coated with, for example, polyimide.
- the material of the insulator 34 is composed of, for example, an insulating paper or a resin material, or a combination of the insulating paper and the resin material.
- the motor rotor 40 includes a rotor yoke 41, a magnet 42, and a space 43 (see FIG. 2).
- the rotor yoke 41 is a cylindrical member, and the outer diameter of the rotor yoke 41 is smaller than the inner diameter of the stator core 31.
- the motor rotor 40 is provided in an annular shape with a gap serving as a magnetic gap MG inside the motor stator 30 in the radial direction.
- the rotor yoke 41 is preferably made of ferromagnetic low carbon steel and nickel-plated on its surface. By applying nickel plating, the rotor yoke 41 can prevent rust and reduce outgassing.
- the plurality of magnets 42 are attached along the outer circumference of the rotor yoke 41. That is, the motor stator 30 (stator core 31) is arranged on the outer side in the radial direction of the magnet 42 via the motor partition wall 50. Since the motor rotor 40 that rotates and the motor stator 30 that is a non-rotating component are arranged in a non-contact manner, it is possible to suppress the generation of foreign matter.
- S poles and N poles are alternately arranged at equal intervals in the circumferential direction of the rotor yoke 41.
- the number of poles of the motor rotor 40 is, for example, 20 poles.
- the number of poles of the motor rotor 40 and the number of slots of the motor stator 30 are not limited to the configuration of 20 poles and 18 slots, and can be appropriately changed as needed.
- a samarium-cobalt permanent magnet as the magnet 42. According to this, even when the motor 1 is used in a high temperature environment, it is not demagnetized, so that the motor rotor 40 can be satisfactorily driven to rotate.
- the magnet 42 is not limited to this, and other materials such as neodymium magnets may be used.
- the space 43 shown in FIG. 2 is a space for preventing magnetic wraparound at the end face of the magnet 42.
- the step dimension Y (see FIG. 4) of the rotor yoke 41 forming the space 43 is preferably about 1/3 or more and 1/2 or less of the thickness dimension X (see FIG. 4) of the magnet 42. If this range is exceeded, magnetic wraparound occurs at the upper end surface of the magnet 42 of the motor rotor 40, magnetism does not rotate toward the stator core 31, and the output torque decreases.
- the motor partition wall 50 is provided in the magnetic gap MG between the motor stator 30 and the motor rotor 40, and the space where the motor rotor 40 is arranged (vacuum atmosphere Va side) and the space where the motor stator 30 is arranged (atmosphere At atmosphere At side). And are separated.
- the detailed configuration of the motor partition wall 50 will be described later.
- the output shaft 17 is connected to the upper end of the rotor yoke 41.
- the output shaft 17 rotates together with the rotor yoke 41 and transmits the rotational force of the motor 1 to the outside (for example, the transport table 111).
- the first bearing 21A and the second bearing 21B are provided between the outer circumference of the housing shaft portion 12 and the inner circumference of the rotor yoke 41.
- the first bearing 21A and the second bearing 21B are non-lubricating bearings that do not contain a lubricant such as grease.
- the first bearing 21A and the second bearing 21B are angular contact ball bearings, respectively, and are arranged in a back surface combination.
- the first bearing 21A and the second bearing 21B are rolling bearings having an inner ring 22, an outer ring 23, and a rolling element 24, respectively.
- the rolling element 24 is provided between the inner ring 22 and the outer ring 23.
- the first bearing 21A is arranged on the output shaft 17 side and the second bearing 21B is arranged on the housing base 11 side in the direction along the rotation center axis AX.
- the inner ring 22 of the first bearing 21A and the inner ring 22 of the second bearing 21B are fixed to the housing shaft portion 12.
- the outer ring 23 of the first bearing 21A and the outer ring 23 of the second bearing 21B are fixed to the rotor yoke 41 of the motor rotor 40.
- An inner ring spacer 25 is provided between the inner ring 22 of the first bearing 21A and the inner ring 22 of the second bearing 21B.
- An outer ring spacer 26 is provided between the outer ring 23 of the first bearing 21A and the outer ring 23 of the second bearing 21B.
- the lower end of the inner ring 22 of the second bearing 21B is fixed to the housing base 11. Further, the lower end of the outer ring 23 of the second bearing 21B is fixed to the rotor yoke 41.
- the first bearing 21A, the spacers (inner ring spacer 25 and outer ring spacer 26) and the second bearing 21B are positioned so as not to cause a gap in the axial direction, and are in a fixed position.
- a preload type rotation support structure is formed. Since the first bearing 21A and the second bearing 21B are given a fixed position preload by the inner ring spacer 25 and the outer ring spacer 26, the rigidity can be improved as compared with the constant pressure preload described later. Further, since the first bearing 21A and the second bearing 21B are arranged in a back surface combination, the rigidity against a moment load can be improved.
- a first seal structure LS1 is provided on the output shaft 17 side of the motor rotor 40 (opposite to the housing base 11 in the axial direction) to seal between the motor rotor 40 and the housing shaft portion 12 in a non-contact manner. More specifically, the first seal structure LS1 is composed of a minute gap formed between the output shaft 17 and the inner ring holding portion 16 on the output shaft 17 side of the first bearing 21A. Further, on the housing base 11 side of the second bearing 21B, a second seal structure LS2 that seals between the motor rotor 40 and the housing shaft portion 12 in a non-contact manner is provided.
- the output shaft 17 side and the housing base 11 side of the first bearing 21A and the second bearing 21B are sealed by the first seal structure LS1 and the second seal structure LS2, respectively.
- the motor 1 can suppress the outflow of dust due to wear of the first bearing 21A and the second bearing 21B to the vacuum atmosphere Va side by the first seal structure LS1 and the second seal structure LS2.
- At least the rolling element 24 is made of ceramics.
- the material of the rolling element 24 silicon nitride, zirconia, alumina and the like are used. According to this, it is possible to suppress dust generation due to wear and gas generation in a high temperature environment from the rolling elements 24 of the first bearing 21A and the second bearing 21B.
- a magnetic iron-based member is used for the inner ring 22 and the outer ring 23 of the first bearing 21A and the second bearing 21B.
- the magnetic iron-based member is, for example, martensitic stainless steel. According to this, even when dust generation (metal powder) due to wear of the bearings (first bearing 21A and second bearing 21B) wraps around inside the motor 1, the magnet 42 of the motor rotor 40 and the magnetic force of the motor stator 30 (motor stator 30). (Magnetic field) is attracted to the motor bulkhead 50 (acting through the wall 51 (see FIG. 5 below)).
- the resolver 60 is provided on the outer side in the radial direction of the first bearing 21A and the second bearing 21B and on the output shaft 17 side of the motor stator 30 in the axial direction.
- the resolver 60 is an angle detector that detects the rotation of the motor rotor 40.
- the resolver 60 includes an incremental resolver 60A and an absolute resolver 60B.
- the incremental resolver 60A is a differential type detector that detects a relative angle with high resolution.
- the absolute resolver 60B is a detector that detects the absolute angle of one rotation of the output shaft 17.
- the motor stator 30, the absolute resolver 60B, and the incremental resolver 60A are arranged in this order in the direction along the rotation center axis. With such an arrangement, the absolute resolver 60B functions as a magnetic shield of the incremental resolver 60A, and it is possible to prevent the magnetic force (magnetic field) generated from the motor stator 30 from reaching the incremental resolver 60A side.
- the incremental resolver 60A includes a resolver stator 61A and a resolver rotor 62A.
- the absolute resolver 60B includes a resolver stator 61B and a resolver rotor 62B.
- the resolver rotors 62A and 62B are made of, for example, low carbon steel.
- the resolver rotors 62A and 62B are arranged to face the resolver stators 61A and 61B with a predetermined gap, and are rotatable with respect to the resolver stators 61A and 61B. Specifically, the resolver stators 61A and 61B are fixed to the housing outer 13.
- the resolver stators 61A and 61B are positioned and fixed with respect to the motor stator 30 and the housing base 11 and are maintained in a stationary state. Further, the resolver rotors 62A and 62B are fixed to the outer periphery of the output shaft 17. The resolver rotors 62A and 62B rotate together with the motor rotor 40.
- a resolver partition wall 70 is provided between the resolver rotors 62A and 62B and the resolver stators 61A and 61B.
- the resolver partition wall 70 is provided so as to cover the resolver stators 61A and 61B.
- the resolver partition wall 70 also has a mounting structure with the chamber 101 (see FIG. 1), and is fixed to the chamber 101 at a portion protruding outward in the radial direction from the housing outer 13.
- a groove 70b is provided on the upper surface 70a of the partition wall 70 of the resolver partition wall 70.
- the groove portion 70b is formed in an annular shape centered on the rotation center axis AX.
- a sealing member (not shown) such as an O-ring fitted in the groove 70b seals between the partition wall upper surface 70a and the chamber 101.
- the motor stator 30 is arranged closer to the atmosphere At atmosphere than the motor rotor 40.
- the bearings (first bearing 21A and second bearing 21B) are provided inside the motor rotor 40 in the radial direction. More specifically, the rotor yoke 41 is arranged radially inside the magnet 42, and the bearings (first bearing 21A and second bearing 21B) are arranged radially inside the rotor yoke 41.
- the resolver 60 is provided on the output shaft 17 side of the motor stator 30 in the axial direction.
- the output shaft 17 side of the motor rotor 40 in the axial direction is sealed with a lid or the like during use, it is possible to prevent dust generated from the bearing from flowing out to the outside (vacuum atmosphere Va side). Further, even when the metal powder generated due to the wear of the bearing wraps around inside the motor 1, the metal powder is applied to the magnet 42 and the motor partition wall 50 (the magnetic force (magnetic field) of the motor stator 30 acts through the wall portion 51). Is adsorbed. Therefore, the motor 1 can prevent the dust generated inside from flowing out to the outside.
- the housing 10 is provided with an exhaust port 80 connected to the outside.
- the gas in the space where the motor stator 30 is arranged can be exhausted to the outside, and the cooling efficiency of the motor stator 30 can be improved.
- the outer diameter of the motor rotor 40 is smaller than the outer diameter of the resolver rotors 62A and 62B. Therefore, the rotating structure including the motor rotor 40 and the resolver rotors 62A and 62B can be integrally pulled out from the output shaft 17 side only by removing the inner ring holding portion 16 from the housing shaft portion 12. Therefore, the bearings (first bearing 21A and second bearing 21B) can be easily replaced and maintained.
- the inner diameter r2 of the resolver partition wall 70 is larger than the outer diameter r1 of the magnet 42 (magnet). Further, the inner diameter r3 of the connecting portion 15 is larger than the outer diameter r1 of the magnet 42 (magnet).
- the outer diameter r1 of the magnet 42 (magnet) indicates the diameter of a virtual circle formed by connecting the outer circumferences of a plurality of magnets 42 (magnets) arranged in the circumferential direction.
- the inner diameter r2 of the resolver partition wall 70 is the inner diameter r2 of the inner side wall portion 71 (see FIG. 6) arranged between the resolver stators 61A and 61B and the resolver rotors 62A and 62B in the radial direction.
- the inner diameter r3 of the connecting portion 15 is the inner diameter r3 of the inner peripheral surface 15c (see FIG. 5) of the connecting top plate portion 15a.
- the rotor yoke 41 is arranged inside the magnet 42 in the radial direction, and the bearings (first bearing 21A and the second bearing 21B) are arranged inside the rotor yoke 41 in the radial direction.
- the bearings (first bearing 21A and second bearing 21B), the motor rotor 40, and the non-rotating parts such as the resolver partition 70, the motor partition 50, the connecting portion 15, and the resolver stators 61A and 61B are not disassembled.
- the rotating structure including the resolver rotors 62A and 62B can be integrally pulled out from the output shaft 17 side.
- FIG. 4 is an enlarged cross-sectional view showing the first bearing of the motor according to the embodiment.
- the inner ring holding portion 16 is fixed to the upper end of the housing shaft portion 12 by the bolt BT1.
- the inner ring holding portion 16 is an annular member having an opening connected to the internal space SP.
- the inner ring holding portion 16 may have a flat plate shape that covers the internal space SP.
- a step portion 16a is formed on the outer periphery of the inner ring holding portion 16 at a portion protruding outward in the radial direction from the housing shaft portion 12.
- the upper end of the inner ring 22 of the first bearing 21A is in contact with the step portion 16a.
- the lower end of the inner ring 22 of the first bearing 21A is in contact with the inner ring spacer 25.
- the inner ring 22 of the first bearing 21A is positioned so as to be sandwiched between the step portion 16a and the inner ring spacer 25 in the axial direction.
- a fourth gap G4 is formed between the inner ring 22 of the first bearing 21A and the housing shaft portion 12. Further, a fourth gap G4 is also formed between the inner ring 22 (see FIG. 5) of the inner ring spacer 25 and the second bearing 21B and the housing shaft portion 12.
- the fourth gap G4 is, for example, about 0.10 mm or more and 0.15 mm or less.
- the output shaft 17 is fixed to the upper end of the rotor yoke 41 of the motor rotor 40 by the bolt BT2.
- a protruding portion 41d projecting in the axial direction is provided.
- the protruding portion 41d is an annular member provided along the outer circumference of the rotor yoke 41, and is formed to have a width smaller than the radial width of the rotor yoke 41.
- the output shaft 17 is fixed to the inside of the protrusion 41d in the radial direction. That is, the output shaft 17 and the rotor yoke 41 are fixed by a so-called in-row coupling.
- the output shaft 17 can be easily positioned at the time of replacement or maintenance of the bearings (first bearing 21A and second bearing 21B). Further, it is preferable that the output shaft 17 is made of a material having a coefficient of thermal expansion larger than that of the rotor yoke 41 and the protruding portion 41d. As a result, when the motor 1 is used in a high temperature environment, the misalignment of the output shaft 17 can be suppressed.
- the output shaft 17 has a stepped portion 17b formed at a portion protruding inward in the radial direction from the inner peripheral surface of the rotor yoke 41.
- the upper end of the outer ring 23 of the first bearing 21A is in contact with the step portion 17b.
- the lower end of the outer ring 23 of the first bearing 21A is in contact with the outer ring spacer 26.
- the outer ring 23 of the first bearing 21A is positioned so as to be sandwiched between the step portion 17b and the outer ring spacer 26 in the axial direction.
- the output shaft 17 further has a flange portion 17a.
- the flange portion 17a is an annular member extending radially inward from the inner peripheral surface of the output shaft 17.
- the flange portion 17a is provided so as to cover the space between the inner ring 22 and the outer ring 23 of the first bearing 21A.
- the inner peripheral surface of the flange portion 17a is arranged so as to face the outer peripheral surface of the inner ring holding portion 16 with a gap G0, whereby the first seal structure LS1 is formed.
- the gap G0 constituting the first seal structure LS1 is formed, for example, with a thickness of 0.05 mm or more and 0.15 mm or less. It is preferable that the first seal structure LS1 adopts a labyrinth structure.
- the labyrinth structure may have any structure, and for example, even if a groove is formed at a position facing the flange portion 17a of the inner ring holding portion 16 and the gap G0 is formed in a substantially C shape in a cross-sectional view. good.
- the output shaft 17 also serves as a support structure for the resolver rotors 62A and 62B. That is, the output shaft 17 has an overhanging portion 17d that projects radially outward from the motor rotor 40, and a step portion 17c is formed by the portion fixed to the motor rotor 40 and the overhanging portion 17d.
- the resolver rotors 62A and 62B are incorporated in the stepped portion 17c and fixed by the bolt BT3. With such a structure, the resolver rotors 62A and 62B rotate integrally with the output shaft 17 and the motor rotor 40.
- FIG. 5 is an enlarged cross-sectional view showing a motor stator, a motor rotor, and a motor partition wall of the motor according to the embodiment.
- the lid portion 14 of the housing 10 is fixed to the housing base 11 with bolts BT4.
- the lid portion 14 is formed with a convex portion protruding into the internal space SP of the housing shaft portion 12, and the outer circumference of the convex portion and the inner circumference of the housing shaft portion 12 are sealed by a sealing member SL1 such as an O-ring. ..
- the housing outer 13 is fixed to the outer edge side of the housing base 11 with bolts BT5.
- a plurality of stepped portions 11a, 11b, 11c, 11d, 11e are formed between the housing shaft portion 12 and the housing outer 13.
- Step portions 11a, 11b, 11c, 11d, 11e are provided in this order from the housing shaft portion 12 toward the outer side in the radial direction, and the height of the upper surface is lowered in the order of the step portions 11a, 11b, 11c, 11d, 11e.
- the lower end of the inner ring 22 of the second bearing 21B is in contact with the upper surface of the step portion 11a.
- the upper end of the inner ring 22 of the second bearing 21B is in contact with the inner ring spacer 25.
- the inner ring 22 of the second bearing 21B is sandwiched between the step portion 11a and the inner ring spacer 25, and the position in the axial direction is fixed.
- a flange portion 41a is formed on the lower end side of the rotor yoke 41 so as to project radially inward from the inner peripheral surface.
- the lower end of the outer ring 23 of the second bearing 21B is in contact with the upper surface of the flange portion 41a.
- the upper end of the outer ring 23 of the second bearing 21B is in contact with the outer ring spacer 26.
- the outer ring 23 of the second bearing 21B is sandwiched between the flange portion 41a and the outer ring spacer 26, and the position in the axial direction is fixed.
- the step portions 11b and 11c are formed on the housing base 11, the outer ring 23 of the second bearing 21B and the lower end side of the rotor yoke 41 are provided in non-contact with the housing base 11.
- the second seal structure LS2 is composed of a minute gap formed between the stepped portions 11b and 11c of the housing base 11 and the lower end side of the rotor yoke 41.
- the minute gaps constituting the second seal structure LS2 are formed, for example, at about 0.05 mm or more and 0.15 mm or less.
- the second seal structure LS2 preferably adopts a labyrinth structure. Further, the upper end of the magnet 42 is in contact with the stepped portion 41b formed on the outer circumference of the rotor yoke 41 and is positioned.
- the motor partition wall 50 has a wall portion 51, a top plate portion 52, and a flange portion 53.
- the motor partition wall 50 is a partition wall that seals the space in which the motor rotor 40 is arranged (vacuum atmosphere Va side) so that the gas in the space in which the motor stator 30 is arranged (atmosphere At atmosphere At side) does not flow.
- the wall portion 51 of the motor partition wall 50 is a tubular member extending in the axial direction, and is arranged between the stator core 31 and the magnet 42 fixed to the rotor yoke 41.
- the wall portion 51 faces the outer circumference of the magnet 42 with a first gap G1.
- the first gap G1 is a gap formed between the motor partition wall 50 and the motor rotor 40 in the radial direction.
- the radial thickness of the wall portion 51 is 40% or more and 80% or less of the length of the gap between the stator core 31 and the magnet 42 fixed to the rotor yoke 41.
- the top plate portion 52 is connected to the upper end side of the wall portion 51 and is provided so as to extend outward in the radial direction.
- the top plate portion 52 is provided so as to cover at least a part of the motor stator 30. That is, the top plate portion 52 is arranged on the output shaft 17 side of the stator core 31, the insulator 34, and the exciting coil 35 in the axial direction.
- the connecting portion 15 is provided so as to cover the upper surface and the radial outer side of the top plate portion 52.
- the connecting portion 15 has a connecting top plate portion 15a and a connecting wall portion 15b.
- the connecting wall portion 15b is a tubular member, extends along the axial direction, and is arranged between the inner peripheral surface of the housing outer 13 and the outer peripheral surfaces of the insulator 34 and the top plate portion 52.
- the connecting top plate portion 15a is connected to the upper end side of the connecting wall portion 15b and extends radially inward.
- the connecting top plate portion 15a is provided so as to overlap with the top plate portion 52 of the motor partition wall 50.
- a flange portion 13a extending inward in the radial direction is provided on the inner peripheral surface of the housing outer 13.
- the upper end of the connecting wall portion 15b is fixed to the lower surface of the flange portion 13a with bolts BT6.
- the stator core 31 of the motor stator 30 is fixed to the lower end of the connecting wall portion 15b with bolts BT7. With such a configuration, the motor stator 30 is fixed to the housing outer 13 of the housing 10 via the connecting portion 15.
- a part of the connecting top plate portion 15a on the inner peripheral surface 15c side is provided so as to overlap the top plate portion 52.
- the top plate portion 52 is fixed to the connecting top plate portion 15a by bolts BT8.
- the top plate portion 52 is fixed to the housing outer 13 via the connecting portion 15.
- the lower surface of the connecting top plate portion 15a and the upper surface of the top plate portion 52 are sealed by a sealing member SL3 such as an O-ring.
- the inner peripheral surface 15c of the connecting top plate portion 15a is provided so as to face the outer peripheral surface 41c of the rotor yoke 41 with a third gap G3.
- the size of the third gap G3 is smaller than the size of the first gap G1.
- the connecting portion 15 is fixed and positioned on the housing outer 13, whereby the distance between the rotor yoke 41 of the motor rotor 40 and the connecting portion 15 (third gap G3) is secured within a predetermined range. be able to.
- the flange portion 53 of the motor partition wall 50 is connected to the lower end side of the wall portion 51 and is provided so as to extend inward in the radial direction.
- the flange portion 53 is fixed to the upper surface of the stepped portion 11d of the housing base 11 by bolts BT9.
- the lower surface of the flange portion 53 and the upper surface of the step portion 11d are sealed by a sealing member SL2 such as an O-ring.
- the motor rotor 40 and bearings (first bearing 21A and second bearing 21B) are provided in a space surrounded by the motor partition wall 50, the housing base 11, the housing shaft portion 12, and the output shaft 17. Therefore, the positioning accuracy of each component and the rigidity of the motor 1 can be improved.
- a non-magnetic material is used for the motor partition wall 50.
- the material of the motor partition wall 50 for example, austenitic stainless steel is suitable. Therefore, it is possible to suppress a decrease in the magnetic force (magnetic field) when driving the motor rotor 40 through the wall portion 51.
- the motor partition wall 50 can be formed as a cylindrical integrally molded product by, for example, deep drawing a non-magnetic stainless steel plate.
- the wall portion 51 is formed thinner than the top plate portion 52 and the flange portion 53. Specifically, the top plate portion 52 and the flange portion 53 have a wall thickness of several mm, while the wall portion 51 is stretched to a wall thickness of 0.2 mm or more and 0.5 mm or less.
- the connecting portion 15 is made of a magnetic material.
- the connecting portion 15 is a soft magnetic material, and is formed of, for example, low carbon steel having a carbon concentration of 0.48% or less. Examples of low carbon steel include S45C specified in JIS standards. Therefore, the connecting portion 15 functions as a shield, and it is possible to prevent the magnetic force (magnetic field) generated from the motor stator 30 from reaching the resolver 60 side. Since a part of the connecting portion 15 (inner peripheral surface 15c of the connecting top plate portion 15a) is exposed to the vacuum atmosphere Va side, it is preferable to use the same material as the rotor yoke 41 of the motor rotor 40.
- the third gap G3 between the inner peripheral surface 15c of the connecting portion 15 and the outer peripheral surface 41c of the rotor yoke 41 is about 0.1 mm or more and 0.4 mm or less. Further, the length of the third gap G3 between the inner peripheral surface 15c of the connecting portion 15 and the outer peripheral surface 41c of the rotor yoke 41 in the direction along the rotation center axis is about 1 mm or more and 4 mm or less. Further, the thickness t of the portion of the connecting portion 15 facing the rotor yoke 41 is 1 mm or more. Here, the thickness t is the thickness of the connecting portion 15 on the radial side (rotor yoke 41 side) of the bolt BT10 (see FIG. 6).
- a magnetic circuit is formed in which the magnetic force (magnetic field) generated from the motor stator 30 returns to the motor stator 30 side through the rotor yoke 41, the third gap G3, and the connecting portion 15.
- the motor 1 can suppress erroneous detection of the position information of the resolver 60.
- the first seal structure LS1 (see FIG. 4) provided on the output shaft side of the first bearing 21A and The second seal structure LS2 (see FIG. 5) provided on the housing base 11 side of the second bearing 21B can prevent the metal powder from flowing out to the vacuum atmosphere Va side.
- the metal powder wraps around the inside of the motor 1 from the lower side (housing base 11 side) of the second bearing 21B (the magnetic force (magnetic field) generated from the motor stator 30 is the wall portion 51 (see FIG. 5)). Since it is attracted to the motor partition wall 50 (acting through) or to the connecting portion 15 (acting on the magnetic field (magnetic field) generated from the motor stator 30), it is possible to suppress the outflow to the outside.
- FIG. 6 is an enlarged cross-sectional view showing the resolver and the resolver partition wall of the motor according to the embodiment.
- the resolver stators 61A and 61B are fixed to the upper surface of the flange portion 13a of the housing outer 13 by bolts BT12.
- the resolver stators 61A and 61B have an annular laminated iron core in which a plurality of stator magnetic poles are formed at equal intervals in the circumferential direction, and a resolver coil is wound around each stator magnetic pole.
- a wiring for outputting a detection signal (resolver signal) Sr is connected to each resolver coil.
- the resolver rotors 62A and 62B are composed of hollow annular laminated iron cores, and are fixed to the stepped portion 17c on the outside of the output shaft 17.
- the arrangement position of the resolver 60 may be on the output shaft 17 side of the motor stator 30 in the axial direction, and is not particularly limited as long as the rotation of the motor rotor 40 (output shaft 17) can be detected.
- the motor control circuit 90 (see FIG. 1) that controls the motor 1 supplies a drive current Mi to the exciting coil 35 of the motor stator 30 based on the detection signal Sr of the resolver 60. Specifically, when the motor rotor 40 rotates, the output shaft 17 rotates together with the motor rotor 40, and the resolver rotors 62A and 62B also rotate in conjunction with each other. As a result, the reluctance between the resolver rotors 62A and 62B and the resolver stators 61A and 61B changes continuously. The resolver stators 61A and 61B detect the change in reluctance and convert the detection signal Sr into a digital signal by the RDC 93.
- the CPU 91 of the motor control circuit 90 that controls the motor 1 can calculate and process the positions and rotation angles of the output shaft 17 and the motor rotor 40 that are interlocked with the resolver rotors 62A and 62B per unit time based on the electric signal of the RDC 93. can. As a result, the motor control circuit 90 can measure the rotation state (for example, rotation speed, rotation direction, rotation angle, etc.) of the output shaft 17.
- the resolver partition wall 70 has an inner side wall portion 71, a resolver top plate portion 72, a mounting portion 73, and a flange portion 74.
- the inner side wall portion 71 is a tubular member extending in the axial direction, and is provided between the resolver stators 61A and 61B and the resolver rotors 62A and 62B in the radial direction.
- the resolver top plate portion 72 is connected to the upper end of the inner side wall portion 71 and extends radially outward.
- the resolver top plate portion 72 is provided so as to cover the resolver stators 61A and 61B. Further, the upper surface of the resolver top plate portion 72 is the above-mentioned partition wall upper surface 70a.
- the mounting portion 73 is provided on the outer side in the radial direction with respect to the resolver top plate portion 72, and is formed to be thicker than the resolver top plate portion 72.
- the mounting portion 73 is fixed to the upper end of the housing outer 13 by the bolt BT11. Further, as described above, the mounting portion 73 is fixed to the outer wall of the chamber 101 by a fixing member such as a bolt.
- the flange portion 74 is connected to the lower end of the inner side wall portion 71 and extends inward in the radial direction.
- the flange portion 74 is provided so as to overlap the upper surface of the connecting portion 15, and is fixed to the connecting portion 15 by a bolt BT10.
- the lower surface of the flange portion 74 and the upper surface of the connecting portion 15 are sealed by a sealing member SL4 such as an O-ring.
- the resolver stators 61A and 61B are provided in a space surrounded by the resolver partition wall 70, the housing outer 13, and the connecting portion 15.
- the resolver rotors 62A and 62B are provided in the space between the resolver partition wall 70 and the output shaft 17.
- the outer peripheral surface 71a of the inner side wall portion 71 is provided so as to face the outer peripheral surface of the overhanging portion 17d of the output shaft 17 with a second gap G2.
- the second gap G2 is a gap formed between the resolver partition wall 70 and the resolver rotors 62A and 62B in the radial direction.
- the second gap G2 is larger than the first gap G1 and larger than the third gap G3.
- FIG. 7 is a cross-sectional view schematically showing the configuration of an incremental resolver included in the motor according to the embodiment.
- FIG. 8 is a block diagram showing a configuration example of a signal processing circuit included in the motor control circuit.
- the resolver stator 61A of the incremental resolver 60A has N-phases protruding inward in the radial direction, for example, three-phase 18-pole convex poles A11-A16, B11-B16, and C11-C16 (first magnetic poles). Are provided at predetermined intervals. Three-phase 18-pole convex poles A21-A26, B21-B26, and C21-C26 (second magnetic poles) are located at intermediate positions between the convex poles of the plurality of convex poles A11-A16, B11-B16, and C11-C16. It will be provided.
- Each convex pole A11-C26 is provided with three teeth TS1, TS2, and TS3 on the end surface on the inner peripheral surface side, and one exciting winding LA11-LC26 is wound around the central portion. Therefore, the convex poles at the 180 degree position are in phase with each other.
- a plurality of slot teeth TR are formed on the outer peripheral surface of the resolver rotor 62A.
- the pitch of the slot teeth TR of the resolver rotor 62A coincides with the teeth TS1, TS2, and TS3 of the convex pole A11 of the resolver stator 61A, for example, assuming that the three adjacent teeth TRs of the resolver rotor 62A coincide with each other.
- the teeth TS1, TS2, and TS3 of the adjacent convex poles C21 are formed so as to cause a mechanical phase shift of 1/36 pitch with respect to the slot tooth TR of the resolver rotor 62A.
- the exciting winding LA11-LC26 of each convex pole A11-C26 is not shown, but the exciting winding LA11-LA16 is connected in series, the exciting winding LB11-LB16 is connected in series, and the exciting winding LC11- LC16s are connected in series. Further, the exciting windings LA21-LA26 are connected in series, the exciting windings LB21-LB26 are connected in series, and the exciting windings LC21-LC26 are connected in series.
- the resolver signals fa1, fa2, fb1, fb2, fc1, and fc2 are output from the incremental resolver 60A to the differential amplifier circuit 95.
- the resolver signals fa1, fa2, fb1, fb2, fc1, and fc2 are outputs from the excitation windings LA11-LA16, LA21-LA26, LB11-LB16, LB21-LB26, LC11-LC16, and LC21-LC26 connected in series, respectively. It is a signal.
- resolver signals fa1, fa2, fb1, fb2, fc1 and fc2 are represented by the following equations (1) to (6).
- fa1 A0 + A1cos ⁇ + A2cos2 ⁇ + A3cos3 ⁇ + A4cos4 ⁇ ...
- fb1 A0 + A1cos ( ⁇ -120 °) + A2cos2 ( ⁇ -120 °) + A3cos3 ( ⁇ -120 °) + A4cos4 ( ⁇ -120 °) ...
- fc1 A0 + A1cos ( ⁇ + 120 °) + A2cos2 ( ⁇ + 120 °) + A3cos3 ( ⁇ + 120 °) + A4cos4 ( ⁇ + 120 °) ...
- fa2 A0 + A1cos ( ⁇ + 180 °) + A2cos2 ( ⁇ + 180 °) + A3cos3 ( ⁇ + 180 °) + A4cos4 ( ⁇ + 180 °) ...
- fb2 A0 + A1cos ( ⁇ -300 °) + A2cos2 ( ⁇ -300 °) + A3cos3 ( ⁇ -300 °) + A4cos4 ( ⁇ -300 °) ...
- fc2 A0 + A1cos ( ⁇ + 300 °) + A2cos2 ( ⁇ + 300 °) + A3cos3 ( ⁇ + 300 °) + A4cos4 ( ⁇ + 300 °) ... (6)
- the output signals da, db, and dc of the differential amplifier circuit 95 are expressed by the following equations (7) and (8). ) And (9).
- the output signal da is a signal output as a difference between the resolver signal fa1 and the resolver signal fa2.
- the output signal db is a signal output as a difference between the resolver signal fb1 and the resolver signal fb2.
- the output signal dc is a signal output as a difference between the resolver signal fc1 and the resolver signal fc2.
- da 2A1cos ⁇ + 2A3cos3 ⁇ ...
- db 2A1cos ( ⁇ -120 °) + 2A3cos3 ( ⁇ -120 °) ...
- dc 2A1cos ( ⁇ + 120 °) + 2A3cos3 ( ⁇ + 120 °) ...
- the three-phase output signals da, db, and dc of the differential amplifier circuit 95 are supplied to the phase conversion circuit 96.
- the phase conversion circuit 96 uses the output signals da, db, and dc as the two-phase AC signals fc ( ⁇ ) and fs ( ⁇ ) represented by the following equations (10) and (11) to cancel the third harmonic distortion. ).
- the multiplication output of the multiplier 93a is sin ⁇ t ⁇ sin ⁇ , and the multiplication output of the multiplier 93b is “0”.
- the subtraction output of the subtractor 93c that is, Vsin ⁇ t ⁇ sin ( ⁇ ) becomes Vsin ⁇ t ⁇ sin ⁇ , which is supplied to the synchronous rectifier 93d.
- the output Vsin ⁇ from which the exciting voltage component has been removed is output by the synchronous rectifier 93d, and this is output to the CPU 91 (see FIG. 1) as a speed detection signal.
- the output Vsin ⁇ of the synchronous rectifier 93d is supplied to the voltage controlled oscillator 93e and converted into a pulse signal corresponding to the voltage, which is supplied to the counter 93f.
- the count value (digital rotation angle ⁇ ) of the counter 93f becomes a value equal to the phase angle ⁇ .
- the CPU 91 controls the rotation speed and positioning based on the speed detection signal from the incremental resolver 60A and the like. As described above, since the differential resolver is adopted as the incremental resolver 60A, erroneous detection due to the magnetic force (magnetic field) generated from the motor stator 30 can be suppressed.
- FIG. 9 is a flowchart for explaining a method of driving the incremental resolver and the absolute resolver.
- the CPU 91 when the power of the motor 1 is turned on, the CPU 91 first excites the absolute resolver 60B (step ST1). Thereby, the CPU 91 can determine the angle (position) of the motor rotor 40 at the time of turning on the power based on the absolute angle information from the absolute resolver 60B.
- the CPU 91 stops the excitation of the absolute resolver 60B (step ST2) and excites the incremental resolver 60A (step ST3).
- the CPU 91 can detect a precise position based on the resolver signals fa1, fa2, fb1, fb2, fc1 and fc2 from the incremental resolver 60A.
- the CPU 91 drives the motor 1 based on the position information, the speed detection signal, etc. from the incremental resolver 60A (step ST4), and executes the control of the rotation speed and the positioning.
- the absolute resolver 60B functions as a shield that shields the magnetic field (magnetic field) generated from the motor stator 30 when the motor 1 is driven, and suppresses the magnetic field (magnetic field) generated from the motor stator 30 from reaching the incremental resolver 60A side. be able to.
- each component of the motor 1 described above are merely examples, and may be changed as appropriate.
- the resolver partition wall 70 is not limited to the case where it is integrally formed, and may be divided into a plurality of parts. Further, the fixing structure and the seal structure of each component may be changed as appropriate.
- the motor 1 of the present embodiment includes a housing 10, a motor stator 30, a motor rotor 40, bearings (first bearing 21A and second bearing 21B), a seal structure LS, a resolver 60, and the like.
- the housing 10 includes a housing base 11 and a housing shaft portion 12 provided on the housing base 11 and extending in a direction along the rotation center axis AX.
- the motor stator 30 is arranged on the outer side in the radial direction of the housing shaft portion 12.
- the motor rotor 40 is provided between the motor stator 30 and the housing shaft portion 12.
- the bearing is provided inside the motor rotor 40 in the radial direction, and rotatably supports the motor rotor 40 on the housing shaft portion 12.
- the seal structure LS seals between the motor rotor 40 and the housing shaft portion 12 on the output shaft 17 side of the motor rotor 40.
- the resolver 60 detects the rotation of the motor rotor 40.
- the resolver 60 is provided on the output shaft 17 side of the motor stator 30 in the radial direction outside the bearing and in the direction along the rotation center axis AX.
- the bearing is provided inside the motor rotor 40 in the radial direction. Since the output shaft 17 side of the motor rotor 40 is sealed with a lid or the like during use, it is possible to prevent dust generated from the bearing from flowing out to the outside, for example, to the vacuum atmosphere Va side. Further, even when dust (metal powder) generated due to wear of the bearing wraps around inside the motor 1, the metal powder is attracted to the motor partition wall 50 (due to the magnetic force (magnetic field) of the motor stator 30). Therefore, the motor 1 can prevent the dust generated inside from flowing out to the outside. Further, since the outflow of metal powder to the resolver 60 side is suppressed, it is possible to suppress a decrease in the detection accuracy of the resolver 60.
- the motor 1 is provided between the motor stator 30 and the motor rotor 40, and has a motor partition wall 50 that separates the space where the motor stator 30 is arranged and the space where the motor rotor 40 is arranged. According to this, the motor partition wall 50 can prevent the gas on the atmospheric atmosphere side where the motor stator 30 is arranged from flowing out to the vacuum atmosphere side where the motor rotor 40 is arranged.
- the resolver 60 includes resolver rotors 62A and 62B connected to the motor rotor 40, and resolver stators 61A and 61B provided on the radial outer side of the resolver rotors 62A and 62B and having an exciting coil.
- the resolver partition wall 70 is provided between the resolver rotors 62A and 62B and the resolver stators 61A and 61B.
- the space in which the resolver rotors 62A and 62B are arranged and the space in which the resolver stators 61A and 61B are arranged are separated by the resolver partition 70, and the gas on the atmosphere side in which the resolver stators 61A and 61B are arranged is released. , It is possible to suppress the outflow to the vacuum atmosphere side where the resolver rotors 62A and 62B are arranged. Further, the resolver 60 is used as the angle detector, and no electronic element is arranged in the motor 1. Therefore, even when the motor 1 is used in a high temperature environment, the angle can be detected satisfactorily.
- the outer diameter of the motor rotor 40 is smaller than the outer diameter of the resolver rotors 62A and 62B. According to this, the rotating structure including the motor rotor 40 and the resolver rotors 62A and 62B can be integrally pulled out from the output shaft 17 side, so that the bearings (first bearing 21A and second bearing 21B) can be replaced or maintained. It's easy.
- the bearings (first bearing 21A and second bearing 21B) are unlubricated, and the inner ring 22 provided on the housing shaft portion 12, the outer ring 23 provided on the motor rotor 40, and the inner ring 22 It has a rolling element 24 provided between the outer ring 23, and at least the rolling element 24 of the inner ring 22, the outer ring 23 and the rolling element 24 is made of ceramics. According to this, it is possible to suppress dust generation due to wear and gas generation in a high temperature environment from the rolling element 24 of the bearing.
- the bearings (first bearing 21A and second bearing 21B) are unlubricated, and the inner ring 22 provided on the housing shaft portion 12, the outer ring 23 provided on the motor rotor 40, and the inner ring 22 A rolling element 24 provided between the outer ring 23 and the rolling element 24 is provided, and a magnetic iron-based member is used for the inner ring 22 and the outer ring 23. According to this, even when dust generated by wear of the bearing wraps around inside the motor 1, the metal powder is satisfactorily adsorbed on the permanent magnets of the motor stator 30 and the motor rotor 40.
- a connecting portion 15 made of a magnetic material is arranged between the motor stator 30 and the resolver 60 in the direction along the rotation center axis AX. According to this, since the connecting portion 15 can shield the magnetic force (magnetic field) generated from the motor stator 30, the detection accuracy of the resolver 60 can be improved. Further, the connecting portion 15 can adsorb the metal powder generated by the wear.
- the motor 1 is provided on the output shaft 17 side of the motor rotor 40, and is provided on the output shaft 17 side of the housing shaft portion 12 and the outer ring holding portion (step portion 17b) fixed to the outer ring 23 of the bearing. It has an inner ring holding portion 16 fixed to the inner ring 22, and the seal structure LS has a labyrinth structure formed by the outer ring holding portion 16 and the inner ring holding portion 16. According to this, the dust generated from the motor 1 due to the wear of the bearing or the like is shielded by the seal structure LS and can be suppressed from flowing out to the outside.
- the motor stator 30 is arranged in a space closer to the atmosphere than the space in which the motor rotor 40 is arranged. According to this, the cooling efficiency of the motor stator 30 can be improved as compared with the case where the motor stator 30 is arranged in the same space as the motor rotor 40, for example, in the vacuum atmosphere Va.
- the motor rotor 40 includes a samarium-cobalt permanent magnet. According to this, even when the motor 1 is used in a high temperature environment, the magnet 42 is not demagnetized, so that the motor rotor 40 can be satisfactorily driven to rotate.
- the motor 1 includes a motor control circuit 90 that supplies a drive current Mi to the exciting coil 35 of the motor stator 30 based on the detection signal Sr of the resolver 60.
- the motor control circuit 90 can constantly monitor the rotational torque and the speed ripple based on the detection signal Sr of the resolver 60. Thereby, for example, the occurrence of an abnormality in the bearing can be detected at an early stage, or the replacement time of the bearing can be grasped.
- FIG. 10 is a cross-sectional view schematically showing the motor according to the first modification.
- the motor 1A according to the first modification is different from the above-described embodiment in that the housing shaft portion 12A of the housing 10 has a solid columnar shape. That is, the internal space SP is not formed inside the housing shaft portion 12A.
- the motor 1A according to the first modification can simplify the configuration of the housing 10.
- the inner ring holding portion 16A can also be in the shape of a disk having no opening.
- FIG. 11 is a plan view schematically showing a part of the motor according to the second modification.
- FIG. 12 is a plan view schematically showing a part of a motor provided with a motor winding.
- FIG. 11 is a plan view schematically showing a part of the motor 1B, specifically, the motor stator 30A and the motor rotor 40.
- the motor stator 30A includes a stator core 31A, an insulator 34 (see FIG. 12), and a motor winding 35a (exciting coil 35) (see FIG. 12).
- the stator core 31A has a back yoke 32A and a teeth 33A (slip pole).
- the back yoke 32A is an annular member, and a plurality of teeth 33A are arranged on the back yoke 32A in the circumferential direction and are arranged at equal intervals.
- Each of the teeth 33A projects radially inward from the inner peripheral surface of the back yoke 32A and is formed in a straight shape. That is, the teeth 33A is formed at the end portion in the extending direction, having no portion protruding in the circumferential direction, and having a constant width along the extending direction.
- the exciting coil 35 is wound around the teeth 33A of the stator core 31A via the insulator 34, respectively.
- the motor winding 35a is inserted into the teeth 33A in a state of being wound outside in advance and formed as an exciting coil 35.
- the number of turns (space factor) of the motor winding 35a can be improved as compared with the case where the motor winding 35a is wound around the teeth 33A to form the exciting coil 35, and as a result, the motor winding 35a can be improved. It is possible to suppress the temperature rise of the motor 1B due to the drive current Mi flowing through the motor.
- FIG. 13 is an enlarged cross-sectional view of the first bearing of the motor according to the third modification.
- the first bearing 21A is subjected to a constant pressure preload by the preload spring 18 as compared with the above-described embodiment, the first modification and the second modification.
- the configuration in which the rotation support structure of the constant pressure preload system is formed is different.
- the outer ring 23 of the first bearing 21A is positioned by the outer ring spacer 26, and the inner ring 22 is subjected to a constant pressure preload by the preload spring 18. That is, in the third modification, the inner ring spacer 25 (see FIG. 4) is not provided. More specifically, the inner ring holding portion 16A is provided so as to cover the inner peripheral side and the upper side of the inner ring 22 of the first bearing 21A. The flange portion 16Aa of the inner ring holding portion 16A is provided so as to project inward in the radial direction, and is fixed to the housing shaft portion 12 by the bolt BT1.
- the superimposing portion 16Ac is provided on the side opposite to the housing base 11 of the inner ring 22 of the first bearing 21A.
- the overlapping portion 16Ac is arranged so as to cover the upper side of the inner ring 22 of the first bearing 21A and the gap between the inner ring 22 and the outer ring 23.
- the overlapping portion 16Ac is provided with a groove portion 16Ab that opens on the lower side (inner ring 22 side).
- the preload spring 18 is arranged in the groove portion 16Ab.
- the groove portions 16Ab are formed in an annular shape along the circumferential direction, and a plurality of preload springs 18 are arranged in the circumferential direction along the inner ring 22.
- a plate 19 is provided between the preload spring 18 and the inner ring 22.
- the plate 19 is an annular member facing the superimposing portion 16Ac (groove portion 16Ab), and the upper surface of the plate 19 and the lower surface of the superimposing portion 16Ac are arranged in a non-contact manner.
- the preload spring 18 can apply a constant pressure preload to the first bearing 21A. Therefore, even when the motor 1C is used in a high temperature environment, it is possible to suppress a change in the preload as compared with the fixed position preload.
- the first seal structure LS1 is formed by a minute gap between the upper surface and the outer peripheral surface of the overlapping portion 16Ac and the inner peripheral surface and the flange portion 17a of the output shaft 17.
- the preload spring 18 shown in FIG. 13 is a compression coil spring.
- the present invention is not limited to this, and the preload spring 18 may be any other type of spring as long as it has a configuration capable of applying a constant pressure preload.
- the configuration of the inner ring pressing portion 16A for holding the preload spring 18 is only an example, and can be appropriately changed.
- FIG. 14 is an enlarged cross-sectional view of the first bearing of the motor according to the fourth modification.
- the motor 1D according to the fourth modification has a rotation support structure of a constant pressure preload system in which a constant pressure preload is applied by the preload spring 18 as in the third modification described above.
- the configuration in which the outer ring spacer 26 has the receiving portion 26a is different from that of the third modification.
- the receiving portion 26a projects radially inward from the inner peripheral surface of the outer ring spacer 26 and is provided so as to cover the gap between the outer ring 23 and the inner ring 22.
- a groove 26b is formed on the surface of the receiving portion 26a facing the first bearing 21A.
- the receiving portion 26a and the groove portion 26b are formed in an annular shape so as to overlap with the first bearing 21A.
- the dust generated by the wear of the first bearing 21A is accumulated in the receiving portion 26a, so that the dust is generated outside the first seal structure LS1 and the second seal structure LS2. It is possible to suppress the outflow.
- the motor stator includes a stator core formed by superimposing electrical steel sheets and having a back yoke and a salient pole, and a motor winding provided on the salient pole and having heat resistance.
- the motor rotor has a rotor yoke formed of a magnetic material and a plurality of magnets provided on the rotor yoke.
- the motor partition wall is made of a non-magnetic material.
- the stator core is arranged on the radial outer side of the plurality of magnets via the motor partition wall.
- the stator core is formed of an adhesive steel plate or an in-mold caulking.
- the salient pole protrudes inward in the radial direction from the inner peripheral surface of the back yoke and is formed in a straight shape.
- the stator core is bolted to the housing.
- the housing has a tubular housing outer provided on the radial outer side of the housing shaft portion.
- the motor stator is arranged so as to have a space and face each other with the inner peripheral surface of the housing outer.
- It has an insulating material that insulates the stator core and the motor winding, and has an insulating material.
- the motor winding and the insulating material have heat resistance of 200 ° C. or higher.
- the thickness of the motor partition wall is 40% or more and 80% or less of the gap between the magnet and the stator core.
- the motor partition wall is made of austenitic stainless steel.
- the magnet is a samarium-cobalt permanent magnet.
- a connecting portion made of a magnetic material is arranged between the motor stator and the resolver in a direction along the rotation center axis.
- the connecting portion is arranged on the radial outer side of the motor rotor, is provided so as to cover the resolver side of the motor stator, and is fixed to the motor stator.
- the connecting portion is made of low carbon steel having a carbon concentration of 0.45% or less.
- the radial length of the distance between the motor rotor and the connecting portion is 0.1 mm or more and 0.4 mm or less.
- the length of the distance between the motor rotor and the connecting portion in the direction along the rotation center axis is 1 mm or more and 4 mm or less.
- the housing is provided on the radial outer side of the housing shaft portion and has a tubular housing outer.
- the motor stator is arranged so as to face the inner peripheral surface of the housing outer with a space.
- the housing outer is made of a non-magnetic material, and the connecting portion is fixed to the housing outer.
- the resolver includes a differential type incremental resolver.
- the resolver further contains an absolute resolver.
- the motor stator, the absolute resolver, and the incremental resolver are arranged in this order in the direction along the rotation center axis.
- the absolute resolver and the incremental resolver each have a resolver stator having an exciting coil and a resolver rotor provided radially inside the resolver stator.
- the resolver rotor of the absolute resolver is made of low carbon steel.
- the absolute resolver and the incremental resolver each have a resolver stator having an exciting coil and a resolver rotor provided radially inside the resolver stator.
- the resolver rotor of the incremental resolver is made of low carbon steel and has a plurality of convex poles.
- the resolver has a resolver stator having an exciting coil and a resolver rotor provided inside the resolver stator in the radial direction.
- a resolver partition wall made of a non-magnetic material is provided between the resolver rotor and the resolver stator.
- An outer ring holding portion provided on the side opposite to the housing base in the axial direction of the motor rotor and fixed to the outer ring of the bearing. It has an inner ring holding portion provided on the side opposite to the housing base in the axial direction of the housing shaft portion and fixed to the inner ring of the bearing.
- the resolver has a resolver rotor connected to the motor rotor and a resolver stator provided on the radial outer side of the resolver rotor and having an exciting coil, and is radially outer than the bearing and. It is provided on the side opposite to the housing base in the direction along the rotation center axis and in the axial direction with respect to the motor stator.
- the outer diameter of the motor rotor is smaller than the outer diameter of the resolver rotor.
- the motor rotor has a rotor yoke and a plurality of magnets provided along the outer circumference of the rotor yoke.
- the inner diameter of the resolver partition wall is larger than the outer diameter of the magnet.
- a connecting portion provided between the motor stator and the resolver in a direction along the rotation center axis and composed of a magnetic material.
- the motor rotor has a rotor yoke and a plurality of magnets provided along the outer circumference of the rotor yoke.
- the inner diameter of the connecting portion is larger than the outer diameter of the magnet.
- the bearing is arranged inside the rotor yoke in the radial direction.
- a gap is formed between the bearing and the housing shaft portion in the radial direction.
- It has an output shaft provided on the side opposite to the housing base in the axial direction of the motor rotor.
- a protruding portion that protrudes in the axial direction is provided at an end portion of the motor rotor that is opposite to the housing base in the axial direction.
- the output shaft is fixed to the inside of the protrusion in the radial direction.
- the connecting portion is arranged on the radial outer side of the motor rotor, is provided so as to cover the resolver side of the motor stator, and is fixed to the motor stator.
- a first seal structure provided on the side opposite to the housing base of the bearing in the axial direction of the motor rotor and sealing between the motor rotor and the housing shaft portion.
- a second seal structure provided on the housing base side of the bearing in the axial direction of the motor rotor and sealing between the motor rotor and the housing base. It has a resolver that detects the rotation of the motor rotor, and The resolver is provided on the side opposite to the housing base in the radial direction outside the bearing and in the direction along the rotation center axis and in the axial direction with respect to the motor stator.
- the bearing is non-lubricated and has an inner ring provided on the housing shaft portion, an outer ring provided on the motor rotor, and a rolling element provided between the inner ring and the outer ring.
- the inner ring, the outer ring, and the rolling element of the bearing at least the rolling element is made of ceramics.
- the inner ring and the outer ring of the bearing are made of magnetic stainless steel.
- the motor rotor has a rotor yoke and a plurality of magnets provided along the outer circumference of the rotor yoke.
- the rotor yoke is arranged inside the plurality of magnets in the radial direction.
- the bearing is arranged radially inside the rotor yoke.
- the bearing has a plurality of angular contact ball bearings arranged in a back combination.
- At least one of the first seal structure and the second seal structure has a labyrinth structure formed with a gap of 0.05 mm or more and 0.15 mm or less.
- the bearing has a first bearing and a second bearing arranged along the axial direction.
- An inner ring spacer provided between the inner ring of the first bearing and the inner ring of the second bearing, It has an outer ring spacer provided between the outer ring of the first bearing and the outer ring of the second bearing.
- An inner ring holding portion provided on the side of the inner ring of the bearing opposite to the housing base and fixed to the housing shaft portion, and an inner ring holding portion.
- the bearing has a preload spring provided between the inner ring holding portion and the bearing to apply a constant pressure preload to the bearing.
- the bearing has a first bearing and a second bearing arranged along the axial direction.
- An outer ring spacer provided between the outer ring of the first bearing and the outer ring of the second bearing, It has a receiving portion that protrudes inward in the radial direction from the inner peripheral surface of the outer ring spacer and is provided so as to cover the gap between the outer ring and the inner ring.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Motor Or Generator Frames (AREA)
Abstract
モータは、ハウジングベースと、ハウジングベースに設けられ、回転中心軸に沿った方向に延在するハウジング軸部と、を含むハウジングと、ハウジング軸部の径方向外側に配置されたモータステータと、モータステータとハウジング軸部との間に設けられたモータロータと、モータロータの径方向内側に設けられ、モータロータをハウジング軸部に回転可能に支持する軸受と、モータロータの軸方向でハウジングベースと反対側に設けられ、モータロータとハウジング軸部との間を密封するシール構造と、モータロータの回転を検出するレゾルバと、を有し、レゾルバは、軸受よりも径方向外側であって、かつ、回転中心軸に沿った方向で、モータステータよりも軸方向でハウジングベースと反対側に設けられる。
Description
本発明は、モータに関する。
特許文献1から特許文献3には、真空雰囲気等で用いられるモータが記載されている。特許文献1から特許文献3に記載されているモータでは、モータロータとモータステータとの間に隔壁が設けられる。隔壁により、モータロータが配置された空間と、モータステータが配置された空間とが遮断される。
例えば、半導体製造工程等において、モータが真空かつ高温の環境で使用される場合では、モータからの発塵や発ガスを抑制することが要求される。特許文献1に記載されているモータは、いわゆるアウターロータ型であり、モータロータが真空雰囲気側(チャンバ内)に設けられる。このため、モータロータからの発塵や発ガスが真空雰囲気側に流出する可能性がある。
特許文献2、3のモータでは、モータロータ又はモータロータに連結された出力軸の外周に軸受が設けられている。このため、軸受が真空雰囲気側に曝されて、軸受からの発塵が真空側に流出する可能性がある。
本発明は、上記の課題に鑑みてなされたものであって、発塵の外部への流出を抑制することができるモータを提供することを目的とする。
上記の目的を達成するため、本発明の一態様に係るモータは、ハウジングベースと、前記ハウジングベースに設けられ、回転中心軸に沿った方向に延在するハウジング軸部と、を含むハウジングと、前記ハウジング軸部の径方向外側に配置されたモータステータと、前記モータステータと前記ハウジング軸部との間に設けられたモータロータと、前記モータロータの径方向内側に設けられ、前記モータロータを前記ハウジング軸部に回転可能に支持する軸受と、前記モータロータの軸方向で前記ハウジングベースと反対側に設けられ(例えば、実施形態における出力軸17側)、前記モータロータと前記ハウジング軸部との間を密封するシール構造と、前記モータロータの回転を検出するレゾルバと、を有し、前記レゾルバは、前記軸受よりも径方向外側であって、かつ、前記回転中心軸に沿った方向で、前記モータステータよりも軸方向で前記ハウジングベースと反対側(例えば、実施形態における出力軸17側)に設けられる。
これによれば、軸受は、モータロータの径方向の内側に設けられる。モータロータの出力軸側は、使用時に蓋等で封止されるため、軸受での発塵が外部の、例えば真空雰囲気側へ流出することを抑制できる。また、軸受の摩耗により発生した金属粉がモータ内部に回り込んだ場合でも、モータステータに金属粉が吸着される。したがって、モータは、内部で発生した発塵が外部に流出することを抑制することができる。また、レゾルバ側に金属粉が流出することが抑制されるので、レゾルバの検出精度の低下を抑制することができる。
モータの望ましい態様として、前記モータステータと前記モータロータとの間に設けられ、前記モータステータの配置された空間と前記モータロータの配置された空間とを区分するモータ隔壁を有する。これによれば、モータ隔壁により、モータステータが配置された大気雰囲気側の気体が、モータロータが配置された真空雰囲気側に流出することを抑制することができる。
モータの望ましい態様として、前記レゾルバは、前記モータロータに連結されたレゾルバロータと、前記レゾルバロータの径方向外側に設けられ、励磁コイルを有するレゾルバステータと、を有し、前記レゾルバロータと前記レゾルバステータとの間にレゾルバ隔壁が設けられる。これによれば、レゾルバ隔壁により、レゾルバロータが配置された空間とレゾルバステータが配置された空間とが区分され、レゾルバステータが配置された大気側の気体が、レゾルバロータが配置された真空雰囲気側に流出することを抑制することができる。また、角度検出器としてレゾルバが用いられ、モータ内に電子的な素子が配置されない。このため、モータが高温環境下で使用される場合であっても、良好に角度を検出できる。
モータの望ましい態様として、前記モータロータの外径は、前記レゾルバロータの外径よりも小さい。これによれば、モータロータ及びレゾルバロータを含む回転構造体を、出力軸側から一体に引き抜くことができるので、軸受の交換やメンテナンスが容易である。
モータの望ましい態様として、前記軸受は、無潤滑であり、前記ハウジング軸部に設けられた内輪と、前記モータロータに設けられた外輪と、前記内輪と前記外輪との間に設けられた転動体と、を有し、前記内輪、前記外輪及び前記転動体のうち、少なくとも前記転動体はセラミックス製である。これによれば、軸受の転動体からの、摩耗による発塵や、高温環境下での発ガスを抑制することができる。
モータの望ましい態様として、前記軸受は、無潤滑であり、前記ハウジング軸部に設けられた内輪と、前記モータロータに設けられた外輪と、前記内輪と前記外輪との間に設けられた転動体と、を有し、前記内輪及び前記外輪は、磁性のある鉄系部材が使用される。これによれば、軸受の摩耗による発塵がモータ内部に回り込んだ場合でも、良好にモータステータやモータロータの永久磁石に金属粉が吸着される。
モータの望ましい態様として、前記中心軸に沿った方向で、前記モータステータと前記レゾルバとの間に磁性体から構成される連結部が配置されている。これによれば、連結部は、モータステータから発生する磁力(磁界)をシールドすることができるので、レゾルバの検出精度を向上させることができる。また、連結部は、摩耗により発生した金属粉を吸着することができる。
モータの望ましい態様として、前記モータロータの軸方向で前記ハウジングベースと反対側(例えば、実施形態における出力軸17側)に設けられ、前記軸受の外輪に固定される外輪押さえ部と、前記ハウジング軸部の軸方向で前記ハウジングベースと反対側(例えば、実施形態における出力軸17側)に設けられ、前記軸受の内輪に固定される内輪押さえ部と、を有し、前記シール構造は、前記外輪押さえ部と前記内輪押さえ部とで形成されたラビリンス構造を有する。これによれば、軸受の摩耗等で発生するモータからの発塵が、シール構造で遮蔽され、外部に流出することを抑制することができる。
モータの望ましい態様として、前記モータステータは、前記モータロータの配置された空間よりも大気側の空間に配置される。これによれば、モータステータがモータロータと同じ空間、例えば真空雰囲気に配置された場合に比べて、モータステータの冷却効率を高めることができる。
モータの望ましい態様として、前記モータロータは、サマリウムコバルト永久磁石を含む。これによれば、モータが高温環境で使用された場合であっても減磁しないので、良好にモータロータを回転駆動させることができる。
モータの望ましい態様として、前記レゾルバの検出信号に基づいて、前記モータステータの励磁コイルに駆動電流を供給するモータ制御回路を備える。これによれば、モータ制御回路は、レゾルバの検出信号に基づいて、回転トルクや速度リップルを常時監視することができる。これにより、例えば軸受の異常の発生等を早期に発見することができ、あるいは、軸受の交換時期を把握することができる。
本発明によれば、発塵の外部への流出を抑制することができるモータを提供することができる。
以下、本発明につき図面を参照しつつ詳細に説明する。なお、下記の発明を実施するための形態(以下、実施形態という)により本発明が限定されるものではない。また、下記実施形態における構成要素には、当業者が容易に想定できるもの、実質的に同一のもの、いわゆる均等の範囲のものが含まれる。さらに、下記実施形態で開示した構成要素は適宜組み合わせることが可能である。
図1は、実施形態に係るモータの使用状態を説明する説明図である。図1に示すように、モータ1が使用される製造装置の一例として、例えば半導体製造装置100について説明する。半導体製造装置100は、チャンバ101と、モータ1と、モータ制御回路90と、制御装置99と、搬送装置110と、を含む。モータ1は、回転中心軸AXを中心に出力軸17(図2参照)を回転駆動する。搬送テーブル111を含む搬送装置110は、チャンバ101の内部に配置されており、開口102を介してモータ1と連結される。半導体製造装置100は、モータ1の駆動により搬送テーブル111を回転させる。半導体製造装置100は、真空雰囲気Vaにあるワーク(被搬送物)120を搬送テーブル111に搭載して移動させる。ワーク120は、例えば、半導体基板、工作物又は工具等である。
モータ1は、ギヤ、ベルト又はローラ等の伝達機構を介在させることなく搬送テーブル111及びワーク120に回転力をダイレクトに伝達し、ワーク120を回転させることができる。モータ1は、いわゆるダイレクトドライブモータである。なお、本実施形態において、軸方向とは、回転中心軸AXに沿った方向である。
制御装置99は、入力回路と、中央演算処理装置であるCPU(Central Processing Unit)と、記憶装置であるメモリと、出力回路(いずれも不図示)とを含む。制御装置99は、メモリに記憶されたプログラムに応じて、モータ1を制御するモータ回転指令iを生成し、モータ制御回路90に出力する。
制御装置99からモータ回転指令iが入力されたとき、モータ制御回路90は、CPU(Central Processing Unit)91から3相アンプ(以下、AMP(Amplifier)92と表す)に駆動信号を出力し、AMP92からモータ1に駆動電流Miが供給される。モータ1は、駆動電流Miにより回転駆動し、搬送テーブル111を回転させる。これにより、搬送テーブル111に搭載されたワーク120を移動させるようになっている。なお、搬送装置110は、搬送テーブル111に加え、ウエハ搬送用のアーム等の他の部材を有していてもよく、ワーク120に応じた構成を適宜採用することができる。
搬送テーブル111が回転すると、回転角度を検出したレゾルバ60(図2参照)等の角度検出器から検出信号(レゾルバ信号)Srが出力される。モータ制御回路90は、検出信号Srをレゾルバデジタル変換器(以下、RDC(Resolver to Digital Converter)93と表す)でデジタル変換する。RDC93からの検出信号Srのデジタル情報に基づいて、CPU91はワーク120が指令位置に到達したか否かを判断し、指令位置に到達する場合、AMP92への駆動信号を停止する。
また、モータ制御回路90は、レゾルバ60の検出信号Srに基づいて、回転トルクや速度リップルを常時監視することができる。これにより、モータ制御回路90は、例えば図2に示す第1軸受21A及び第2軸受21Bの異常の発生等を早期に発見することができ、あるいは、第1軸受21A及び第2軸受21Bの交換時期を把握することができる。
一般に、半導体製造装置100は、半導体の集積度が高まり、それに伴って同時にICのパターン幅の微細化による高密度化が進められている。この微細化に対応できるウエハ(半導体部品)を製造するために、ウエハ品質に対する高度の均一性が要求されている。その要求に応えるためには、真空雰囲気Vaにおける不純物ガス濃度の一層の低減が重要である。このため、チャンバ101の取り付け孔(開口102)に配置されるモータ1においては、真空雰囲気Vaの空間と外部の大気雰囲気Atとを離隔することも必要となる。
なお、本実施形態では、チャンバ101内を真空雰囲気Vaとしている。ただし、チャンバ101内は、真空環境に限定されず、例えば、減圧環境や、窒素ガス、希ガスなどのプロセスガス充填環境等、大気雰囲気Atと異なる雰囲気としてもよい。また、チャンバ101内は、半導体製造に使用される拡散炉等の真空かつ高温の環境も適用可能である。また、本実施形態で「大気側」とは、「真空側」(真空雰囲気Va)よりも高圧の空間である。又は、「大気側」とは、「真空側」(真空雰囲気Va)よりもプロセスガスの比率が低い空間であってもよい。
図2は、実施形態に係るモータを模式的に示す断面図である。図3は、図2のIII-III’断面図である。なお、図2は、回転中心軸AXを含む仮想平面でモータ1を切断した場合の断面図である。以下の説明では、回転中心軸AXに沿った方向で、出力軸17側(真空雰囲気Va側)に向かう方向を「上側」又は単に「上」と表す場合がある。また、回転中心軸AXに沿った方向で、ハウジングベース11側(大気雰囲気At側)に向かう方向を「下側」又は単に「下」と表す場合がある。
図2から図14の各構成要素の寸法は、理解を容易にするために強調して模式的に示している。例えば、モータ隔壁50は、実際よりも厚く図示している。また、隙間G0及び第1隙間G1から第4隙間G4の大きさは、実際よりも大きく示しているが、隙間G0及び第1隙間G1から第4隙間G4は、いずれも微小隙間に形成されている。
図2に示すように、モータ1は、ハウジング10と、モータステータ30と、モータロータ40と、第1軸受21Aと、第2軸受21Bと、レゾルバ60と、モータ隔壁50と、レゾルバ隔壁70と、連結部15と、出力軸17と、を有する。なお、図2及び図3では、各構成要素の全体的な配置関係を説明し、各構成要素間の詳細な接続構造や、シール構造については後述する。
ハウジング10は、ハウジングベース11と、ハウジング軸部12と、ハウジングアウタ13と、蓋部14と、を含む。ハウジングベース11は、回転中心軸AXと交差する方向に延在する平板状の部材であり、回転中心軸AXと重なる位置に開口が設けられた環状に形成される。ハウジング軸部12及びハウジングアウタ13は、それぞれ、回転中心軸AXに沿った方向(以下、軸方向と表す)に延在する筒状の部材である。ハウジング軸部12の下端は、ハウジングベース11の内周縁側に連結され、ハウジングアウタ13の下端は、ハウジングベース11の外周縁側に連結される。つまり、ハウジングアウタ13は、径方向で、ハウジング軸部12の径方向外側に対向して配置される。
蓋部14は、ハウジングベース11の開口を覆って設けられる。蓋部14により、ハウジング軸部12の内部空間SPが大気雰囲気Atと遮断され、内部空間SPへの異物の流入が抑制される。
ハウジングベース11、ハウジング軸部12及び蓋部14は、その一部が真空中に曝されるため、オーステナイト系ステンレス、アルミ合金等、真空中での放出ガスが少なく、かつ放出ガスの成分が既知の真空用材料を用いることができる。また、適用する真空度によっては、電解研磨、平滑化処理、酸化被膜などの表面処理が施されることで、表面積を低減させ、溶存気体の放出を低減させることがより好ましい。ハウジングアウタ13は、本実施形態では、大気雰囲気Atに曝され、真空中に曝されないため、鋳鉄、低炭素鋼など一般的な構造用材料を用いていてもよく、もちろん、ステンレス鋼を用いてもよい。この構造により、モータ1は、構造用材料の使用の比率を高め、構造用材料よりも高価な、真空用材料の使用量を減らすことができる。
モータステータ30と、モータロータ40と、第1軸受21Aと、第2軸受21Bと、モータ隔壁50と、連結部15とは、ハウジング軸部12とハウジングアウタ13との間に組み込まれる。
モータステータ30は、ハウジング軸部12及びモータロータ40の径方向外側に配置され、静止状態に維持される。具体的には、連結部15は、モータステータ30の上側(レゾルバ60側)を覆って設けられ、モータステータ30は、連結部15を介してハウジングアウタ13に固定される。モータステータ30の固定方法として、例えば、モータステータ30のステータコア31は、ハウジング10(ハウジングアウタ13)に対してボルトで締結される。これにより、非回転部品であるモータステータ30は、ハウジングベース11に対して位置決め固定される。また、モータロータ40は、モータステータ30とハウジング軸部12との間に設けられる。第1軸受21A及び第2軸受21Bは、モータロータ40を、ハウジング軸部12に回転可能に支持する。すなわち、モータロータ40は、モータステータ30に対して回転可能に配置される。
図3に示すように、モータステータ30、モータロータ40、第1軸受21A(図3では図示されない)及び第2軸受21Bは、いずれも環状の構造体であり、回転中心軸AXを中心に同心円状に配置される。ハウジング軸部12から、径方向外側に向かって、軸受(第1軸受21A及び第2軸受21B)、モータロータ40、モータ隔壁50、モータステータ30、ハウジングアウタ13の順に配置される。すなわち、モータ1は、いわゆるインナーロータ型であり、モータロータ40がモータステータ30よりも回転中心軸AX側に位置する。言い換えると、モータロータ40が真空雰囲気Va側に配置され、モータステータ30が大気雰囲気At側に配置される。
モータステータ30は、電磁鋼板を重ね合わせて形成され、ステータコア31と、インシュレータ34(図2参照)と、励磁コイル35(図2参照)とを含む。モータステータ30は、例えば、接着鋼板又は型内かしめにて形成される。これにより、ステータコア31の加工が容易であり、かつ、モータステータ30の良好な磁気特性が得られる。ステータコア31は、バックヨーク32とティース33とを有する。バックヨーク32は、環状の部材であり、ハウジングアウタ13の内周面と空間を有して対向して配置される。ティース33は、バックヨーク32に周方向に複数配置され、等間隔で並ぶ。ティース33は、それぞれ、バックヨーク32から径方向内側に突出する。モータステータ30は、このような一体コアに限られず、複数の分割されたステータコア31が配置される分割コアであってもよい。励磁コイル35は、インシュレータ34を介してステータコア31のティース33にそれぞれ巻きつけられる。モータステータ30には、電源からの電力を供給するための配線が接続されており、この配線を通じて励磁コイル35に対してモータ制御回路90から駆動電流Miが供給されるようになっている。
図2に示す励磁コイル35を構成するモータ巻線及びインシュレータ34(絶縁材)は、いずれも耐熱性を有する材料で形成される。モータ巻線及びインシュレータ34(絶縁材)は、例えば200℃以上の耐熱性を有する。これにより、モータ1は、高温環境下で良好に動作することができる。モータ巻線は、例えばポリイミドからなるコーティングが施される。また、インシュレータ34の材料は、例えば、絶縁紙、又は樹脂材料、又は絶縁紙と樹脂材料との組み合わせで構成される。
モータロータ40は、ロータヨーク41、マグネット42及び空間43(図2参照)を含む。ロータヨーク41は、円筒状の部材であり、ロータヨーク41の外径はステータコア31の内径よりも小さい。モータロータ40は、モータステータ30の径方向の内側に、磁気ギャップMGとなる隙間を有して環状に設けられる。ロータヨーク41は、強磁性体の低炭素鋼で形成され、表面にニッケルめっきを施すことが好ましい。ニッケルめっきを施すことで、ロータヨーク41は錆を防ぐことができ、アウトガスを低減することができる。
図3に示すように、複数のマグネット42は、ロータヨーク41の外周に沿って貼り付けられる。すなわち、モータステータ30(ステータコア31)は、モータ隔壁50を介して、マグネット42の径方向外側に配置される。回転運動するモータロータ40と、非回転部品であるモータステータ30とが非接触に配置されるので、異物の発生を抑制することができる。マグネット42は、S極及びN極がロータヨーク41の周方向に交互に等間隔で配置される。モータロータ40の極数は、例えば20極である。なお、モータロータ40の極数及びモータステータ30のスロット数は、20極18スロットの構成に限られず、必要に応じて適宜変更できる。
本実施形態では、マグネット42は、サマリウムコバルト永久磁石を用いることが好ましい。これによれば、モータ1が高温環境で使用された場合であっても減磁しないので、良好にモータロータ40を回転駆動させることができる。なお、これに限定されず、マグネット42は、ネオジム系磁石等、他の材料を用いてもよい。
図2に示す空間43は、マグネット42の端面での磁気の回り込みを防止する空間である。空間43を形成するロータヨーク41の段差寸法Y(図4参照)は、マグネット42の厚さ寸法X(図4参照)の1/3以上1/2以下程度が望ましい。この範囲を超えると、モータロータ40のマグネット42の上端面部で磁気の回り込みが発生し、ステータコア31の方に磁気が回らず、出力トルクが低下する。
モータ隔壁50は、モータステータ30とモータロータ40との間の磁気ギャップMGに設けられ、モータロータ40の配置された空間(真空雰囲気Va側)とモータステータ30の配置された空間(大気雰囲気At側)とを区分する。モータ隔壁50の詳細な構成については後述する。
ロータヨーク41の上端には、出力軸17が連結される。出力軸17は、ロータヨーク41とともに回転し、モータ1の回転力を、外部(例えば、搬送テーブル111)に伝達する。
第1軸受21A及び第2軸受21Bは、ハウジング軸部12の外周と、ロータヨーク41の内周との間に設けられる。第1軸受21A及び第2軸受21Bは、グリース等の潤滑剤を封入しない無潤滑軸受である。第1軸受21A及び第2軸受21Bは、それぞれアンギュラ玉軸受であり、背面組合せで配列される。第1軸受21A及び第2軸受21Bは、それぞれ、内輪22、外輪23及び転動体24を有する転がり軸受である。転動体24は、内輪22と外輪23との間に設けられる。回転中心軸AXに沿った方向で、第1軸受21Aは出力軸17側に配置され、第2軸受21Bは、ハウジングベース11側に配置される。第1軸受21Aの内輪22及び第2軸受21Bの内輪22は、ハウジング軸部12に固定される。第1軸受21Aの外輪23及び第2軸受21Bの外輪23は、モータロータ40のロータヨーク41に固定される。
第1軸受21Aの内輪22と、第2軸受21Bの内輪22との間に内輪間座25が設けられる。第1軸受21Aの外輪23と、第2軸受21Bの外輪23との間に外輪間座26が設けられる。これにより、軸方向での第1軸受21Aと第2軸受21Bとの位置が規定される。ハウジング軸部12の上端(軸方向でハウジングベース11と反対側の端部)には、内輪押さえ部16が連結され、内輪押さえ部16により、第1軸受21Aの内輪22の上端の位置が固定される。出力軸17は、外輪押さえ部を兼用しており、出力軸17により第1軸受21Aの外輪23の上端の位置が固定される。
第2軸受21Bの内輪22の下端は、ハウジングベース11に固定される。また、第2軸受21Bの外輪23の下端は、ロータヨーク41に固定される。このような構成により、第1軸受21A、間座(内輪間座25及び外輪間座26)及び第2軸受21Bは、軸方向で隙間(がた)が生じないように位置決めされて、定位置予圧方式の回転支持構造が形成される。第1軸受21A及び第2軸受21Bは、内輪間座25及び外輪間座26により定位置予圧が付与されるので、後述する定圧予圧に比べて剛性を向上させることができる。また、第1軸受21A及び第2軸受21Bは、背面組合せで配列されるので、モーメント荷重に対する剛性を向上させることができる。
モータロータ40の出力軸17側(軸方向でハウジングベース11と反対側)で、モータロータ40とハウジング軸部12との間を非接触で密封する第1シール構造LS1が設けられる。より具体的には、第1シール構造LS1は、第1軸受21Aの出力軸17側で、出力軸17と内輪押さえ部16との間に形成された微小隙間で構成される。また、第2軸受21Bのハウジングベース11側で、モータロータ40とハウジング軸部12との間を非接触で密封する第2シール構造LS2が設けられる。これにより、第1軸受21A及び第2軸受21Bの出力軸17側及びハウジングベース11側は、それぞれ、第1シール構造LS1及び第2シール構造LS2で密封される。モータ1は、第1シール構造LS1及び第2シール構造LS2により、第1軸受21A及び第2軸受21Bの摩耗による発塵が真空雰囲気Va側に流出することを抑制することができる。
第1軸受21A及び第2軸受21Bの内輪22、外輪23及び転動体24のうち、少なくとも転動体24はセラミックス製である。例えば、転動体24の材料は、窒化ケイ素、ジルコニア、アルミナ等が用いられる。これによれば、第1軸受21A及び第2軸受21Bの転動体24からの、摩耗による発塵や、高温環境下での発ガスを抑制することができる。
また、第1軸受21A及び第2軸受21Bの内輪22及び外輪23は、磁性のある鉄系部材が使用される。磁性のある鉄系部材は、例えばマルテンサイト系ステンレス鋼である。これによれば、軸受(第1軸受21A及び第2軸受21B)の摩耗による発塵(金属粉)がモータ1の内部に回り込んだ場合でも、モータロータ40のマグネット42や(モータステータ30の磁力(磁界)が壁部51(後述の図5参照)越しに作用する)モータ隔壁50に吸着される。
レゾルバ60は、第1軸受21A及び第2軸受21Bよりも径方向外側であって、かつ、軸方向で、モータステータ30よりも出力軸17側に設けられる。レゾルバ60はモータロータ40の回転を検出する角度検出器である。
レゾルバ60は、インクリメンタルレゾルバ60A及びアブソリュートレゾルバ60Bを備える。インクリメンタルレゾルバ60Aは、差動型であり、高分解能で相対角度を検出する検出器である。アブソリュートレゾルバ60Bは、出力軸17の1回転の絶対角度を検出する検出器である。回転中心軸に沿った方向で、モータステータ30、アブソリュートレゾルバ60B、インクリメンタルレゾルバ60Aの順に配置される。このような配置により、アブソリュートレゾルバ60Bは、インクリメンタルレゾルバ60Aの磁気シールドとして機能し、モータステータ30から発生する磁力(磁界)がインクリメンタルレゾルバ60A側に達することを抑制することができる。
インクリメンタルレゾルバ60Aは、レゾルバステータ61Aと、レゾルバロータ62Aを備えている。アブソリュートレゾルバ60Bは、レゾルバステータ61Bと、レゾルバロータ62Bを備えている。レゾルバロータ62A、62Bは、例えば、低炭素鋼で形成される。レゾルバロータ62A、62Bは、レゾルバステータ61A、61Bと所定のギャップを隔てて対向配置され、レゾルバステータ61A、61Bに対して回転可能となっている。具体的には、レゾルバステータ61A、61Bは、ハウジングアウタ13に固定される。これにより、レゾルバステータ61A、61Bは、モータステータ30及びハウジングベース11に対して位置決め固定され、静止状態に維持される。また、レゾルバロータ62A、62Bは、出力軸17の外周に固定されている。レゾルバロータ62A、62Bは、モータロータ40とともに回転する。
レゾルバロータ62A、62Bとレゾルバステータ61A、61Bとの間にレゾルバ隔壁70が設けられる。レゾルバ隔壁70は、レゾルバステータ61A、61Bを覆って設けられる。また、レゾルバ隔壁70は、チャンバ101(図1参照)との取付構造を兼用しており、ハウジングアウタ13よりも径方向外側に張り出した部分で、チャンバ101に固定される。レゾルバ隔壁70の隔壁上面70aには溝部70bが設けられる。溝部70bは、回転中心軸AXを中心とした環状に形成される。溝部70bにはめ込まれたOリング等の密封部材(不図示)により、隔壁上面70aとチャンバ101との間がシールされる。
以上のような構成により、モータステータ30は、モータロータ40よりも大気雰囲気At側に配置される。また、軸受(第1軸受21A及び第2軸受21B)は、モータロータ40の径方向の内側に設けられる。より詳細には、ロータヨーク41はマグネット42の径方向内側に配置され、軸受(第1軸受21A及び第2軸受21B)は、ロータヨーク41の径方向内側に配置される。また、レゾルバ60は、軸方向でモータステータ30よりも出力軸17側に設けられる。軸方向でモータロータ40の出力軸17側は、使用時に蓋等で封止されるため、軸受での発塵が外部(真空雰囲気Va側)へ流出することを抑制できる。また、軸受の摩耗により発生した金属粉がモータ1の内部に回り込んだ場合でも、マグネット42や、(モータステータ30の磁力(磁界)が壁部51越しに作用する)モータ隔壁50に金属粉が吸着される。したがって、モータ1は、内部で発生した発塵が外部に流出することを抑制することができる。
また、ハウジング10には、外部と繋がる排気ポート80が設けられる。これにより、モータステータ30が配置された空間の気体を、外部に排気することができ、モータステータ30の冷却効率を高めることができる。また、図2に示すようにモータロータ40の外径は、レゾルバロータ62A、62Bの外径よりも小さい。このため、内輪押さえ部16をハウジング軸部12から外すのみで、モータロータ40及びレゾルバロータ62A、62Bを含む回転構造体を、出力軸17側から一体に引き抜くことができる。このため、軸受(第1軸受21A及び第2軸受21B)の交換やメンテナンスが容易である。
より詳細には、レゾルバ隔壁70の内径r2は、マグネット42(磁石)の外径r1よりも大きい。また、連結部15の内径r3は、マグネット42(磁石)の外径r1よりも大きい。なお、マグネット42(磁石)の外径r1とは、周方向に配列された複数のマグネット42(磁石)の外周を繋いで形成される仮想円の直径を示す。また、レゾルバ隔壁70の内径r2とは、径方向で、レゾルバステータ61A、61Bとレゾルバロータ62A、62Bとの間に配置される内側壁部71(図6参照)の内径r2である。連結部15の内径r3は、連結天板部15aの内周面15c(図5参照)の内径r3である。また、ロータヨーク41はマグネット42の径方向内側に配置され、軸受(第1軸受21A及び第2軸受21B)は、ロータヨーク41の径方向内側に配置される。このような構成により、レゾルバ隔壁70、モータ隔壁50、連結部15及びレゾルバステータ61A、61B等の非回転部品を分解することなく、軸受(第1軸受21A及び第2軸受21B)、モータロータ40及びレゾルバロータ62A、62Bを含む回転構造体を、出力軸17側から一体に引き抜くことができる。
次に、モータ1の各構成要素の詳細な構造を説明する。図4は、実施形態に係るモータが有する第1軸受を拡大して示す断面図である。図4に示すように、内輪押さえ部16は、ボルトBT1によりハウジング軸部12の上端に固定される。内輪押さえ部16は、内部空間SPに繋がる開口を有する環状の部材である。ただし、内輪押さえ部16は、内部空間SPを覆う平板状であってもよい。内輪押さえ部16の外周には、ハウジング軸部12よりも径方向外側に張り出した部分で段差部16aが形成される。第1軸受21Aの内輪22の上端は、段差部16aに接する。第1軸受21Aの内輪22の下端は、内輪間座25に接する。第1軸受21Aの内輪22は、軸方向で段差部16aと内輪間座25とに挟まれて位置決めされる。
ここで、径方向で、第1軸受21Aの内輪22とハウジング軸部12との間に第4隙間G4が形成される。また、内輪間座25及び第2軸受21Bの内輪22(図5参照)とハウジング軸部12との間にも第4隙間G4が形成される。第4隙間G4は、例えば、0.10mm以上0.15mm以下程度である。これにより、モータ1が高温環境下で使用される場合であっても、軸受(第1軸受21A及び第2軸受21B)とハウジング軸部12との熱膨張係数の違いによる軸ずれを抑制することができる。
出力軸17は、ボルトBT2によりモータロータ40のロータヨーク41の上端に固定される。ロータヨーク41の上端(軸方向でハウジングベース11と反対側の端部)には、軸方向に突出する突出部41dが設けられる。突出部41dはロータヨーク41の外周に沿って設けられた環状の部材であり、ロータヨーク41の径方向での幅よりも小さい幅を有して形成される。出力軸17は、突出部41dの径方向内側に固定される。すなわち、出力軸17とロータヨーク41とは、いわゆるインロー結合により固定される。このため、軸受(第1軸受21A及び第2軸受21B)の交換やメンテナンスの際に、出力軸17の位置決めを容易に行うことができる。また、出力軸17は、ロータヨーク41及び突出部41dよりも大きい熱膨張係数を有する材料が用いられることが好ましい。これにより、モータ1が高温環境下で使用される場合に、出力軸17の位置ずれを抑制することができる。
出力軸17は、ロータヨーク41の内周面よりも径方向内側に張り出した部分で段差部17bが形成される。第1軸受21Aの外輪23の上端は、段差部17bに接する。第1軸受21Aの外輪23の下端は、外輪間座26に接する。第1軸受21Aの外輪23は、軸方向で段差部17bと外輪間座26とに挟まれて位置決めされる。
出力軸17は、さらにフランジ部17aを有する。フランジ部17aは、出力軸17の内周面から径方向内側に延在する環状の部材である。フランジ部17aは、第1軸受21Aの内輪22と外輪23との間の空間を覆うように設けられる。また、フランジ部17aの内周面は、内輪押さえ部16の外周面と隙間G0を有して対向して配置され、これにより第1シール構造LS1が形成される。第1シール構造LS1を構成する隙間G0は、例えば0.05mm以上0.15mm以下程度で形成される。第1シール構造LS1は、ラビリンス構造を採用することが好ましい。ラビリンス構造は、どのような構成であってもよいが、例えば、内輪押さえ部16のフランジ部17aと対向する位置に溝部が形成され、隙間G0が断面視で略C型に形成されていてもよい。
また、出力軸17は、レゾルバロータ62A、62Bの支持構造も兼用する。つまり、出力軸17は、モータロータ40よりも径方向外側に張り出した張出部17dを有し、モータロータ40に固定される部分と、張出部17dとで段差部17cが形成される。レゾルバロータ62A、62Bは、段差部17cに組み込まれ、ボルトBT3で固定される。このような構造で、レゾルバロータ62A、62Bは、出力軸17及びモータロータ40と一体に回転する。
図5は、実施形態に係るモータが有するモータステータ、モータロータ及びモータ隔壁を拡大して示す断面図である。ハウジング10の蓋部14は、ハウジングベース11にボルトBT4で固定される。蓋部14は、ハウジング軸部12の内部空間SPに突出する凸部が形成され、Oリング等の密封部材SL1により、凸部の外周とハウジング軸部12の内周との間がシールされる。
ハウジングアウタ13は、ハウジングベース11の外縁側にボルトBT5で固定される。ハウジングベース11の上面には、ハウジング軸部12とハウジングアウタ13との間で、複数の段差部11a、11b、11c、11d、11eが形成される。ハウジング軸部12から径方向外側に向かって段差部11a、11b、11c、11d、11eの順に設けられ、段差部11a、11b、11c、11d、11eの順に上面の高さが低くなる。
段差部11aの上面に第2軸受21Bの内輪22の下端が接する。第2軸受21Bの内輪22の上端は、内輪間座25に接する。第2軸受21Bの内輪22は、段差部11aと内輪間座25とに挟まれて軸方向の位置が固定される。ロータヨーク41の下端側には、内周面から径方向内側に突出するフランジ部41aが形成される。フランジ部41aの上面に第2軸受21Bの外輪23の下端が接する。第2軸受21Bの外輪23の上端は、外輪間座26に接する。第2軸受21Bの外輪23は、フランジ部41aと外輪間座26とに挟まれて軸方向の位置が固定される。また、ハウジングベース11には、段差部11b、11cが形成されているので、第2軸受21Bの外輪23及びロータヨーク41の下端側は、ハウジングベース11と非接触に設けられる。第2シール構造LS2は、ハウジングベース11の段差部11b、11cと、ロータヨーク41の下端側との間に形成された微小隙間で構成される。第2シール構造LS2を構成する微小隙間は、例えば0.05mm以上0.15mm以下程度で形成される。第2シール構造LS2は、ラビリンス構造を採用することが好ましい。また、ロータヨーク41の外周に形成された段差部41bに、マグネット42の上端が接して位置決めされる。
次に、モータ隔壁50の詳細な構成について説明する。図5に示すように、モータ隔壁50は、壁部51と、天板部52と、フランジ部53とを有する。モータ隔壁50は、モータロータ40の配置された空間(真空雰囲気Va側)に、モータステータ30の配置された空間(大気雰囲気At側)の気体が流通しないように密閉する隔壁である。
具体的には、モータ隔壁50の壁部51は、軸方向に延在する筒状の部材であり、ステータコア31と、ロータヨーク41に固定されたマグネット42との間に配置される。壁部51は、マグネット42の外周と、第1隙間G1を有して対向する。言い換えると、第1隙間G1は、径方向でモータ隔壁50とモータロータ40との間に形成される隙間である。壁部51の径方向での厚さは、ステータコア31と、ロータヨーク41に固定されたマグネット42との間の隙間の長さの40%以上80%以下である。これにより、モータ隔壁50の強度を向上させることができ、モータ隔壁50の変形を抑制することができる。また、モータ隔壁50と、回転部品であるモータロータ40との接触を抑制することができる。
天板部52は、壁部51の上端側に連結され、径方向外側に延在して設けられる。天板部52は、モータステータ30の少なくとも一部を覆って設けられる。すなわち、天板部52は、軸方向で、ステータコア31、インシュレータ34及び励磁コイル35よりも出力軸17側に配置される。
連結部15は、天板部52の上面及び径方向外側を覆って設けられる。具体的には、連結部15は、連結天板部15a及び連結壁部15bを有する。連結壁部15bは、筒状の部材であり、軸方向に沿って延在し、ハウジングアウタ13の内周面と、インシュレータ34及び天板部52の外周面との間に配置される。連結天板部15aは、連結壁部15bの上端側に連結され、径方向内側に延在する。連結天板部15aは、モータ隔壁50の天板部52と重なって設けられる。
ハウジングアウタ13の内周面には、径方向内側に延在するフランジ部13aが設けられる。連結壁部15bの上端は、フランジ部13aの下面にボルトBT6で固定される。また、モータステータ30のステータコア31は、連結壁部15bの下端にボルトBT7で固定される。このような構成で、モータステータ30は、連結部15を介して、ハウジング10のハウジングアウタ13に固定される。
連結天板部15aの内周面15c側の一部は、天板部52と重なって設けられる。天板部52は、連結天板部15aにボルトBT8により固定される。これにより、天板部52は、連結部15を介してハウジングアウタ13に固定される。また、連結天板部15aの下面と、天板部52の上面との間は、Oリング等の密封部材SL3によりシールされる。
また、連結天板部15aの内周面15cは、ロータヨーク41の外周面41cと、第3隙間G3を有して対向して設けられる。第3隙間G3の大きさは、第1隙間G1の大きさよりも小さい。これにより、第1軸受21A及び第2軸受21Bの摩耗による発塵が、第3隙間G3を通ってレゾルバ60側に流出することを抑制できる。また、上述したように、連結部15がハウジングアウタ13に固定されて位置決めされ、これにより、モータロータ40のロータヨーク41と、連結部15との間隔(第3隙間G3)を所定の範囲に確保することができる。
モータ隔壁50のフランジ部53は、壁部51の下端側に連結され、径方向内側に延在して設けられる。フランジ部53は、ハウジングベース11の段差部11dの上面にボルトBT9により固定される。フランジ部53の下面と、段差部11dの上面との間は、Oリング等の密封部材SL2によりシールされる。このような構成により、モータ隔壁50と、ハウジングベース11と、ハウジングアウタ13と、連結部15とで囲まれた空間が密閉される。モータステータ30は、モータ隔壁50と、ハウジングベース11と、ハウジングアウタ13と、連結部15とで囲まれた空間に設けられる。モータロータ40及び軸受(第1軸受21A及び第2軸受21B)は、モータ隔壁50と、ハウジングベース11と、ハウジング軸部12と、出力軸17とで囲まれた空間に設けられる。したがって、各構成部品の位置決め精度と、モータ1の剛性を高めることができる。
モータ隔壁50には非磁性体が用いられる。モータ隔壁50の材質として、例えばオーステナイト系ステンレスが適している。このため、壁部51越しにモータロータ40を駆動する際の磁力(磁界)の低下を抑制することができる。モータ隔壁50は、例えば非磁性ステンレス鋼板に深絞り加工を施すことで、円筒形状とした一体成形品として形成できる。壁部51は、天板部52及びフランジ部53よりも薄く形成される。具体的には、天板部52及びフランジ部53が数mmの肉厚であるのに対し、壁部51は0.2mm以上0.5mm以下の肉厚まで引き延ばしている。これにより、モータ隔壁50の剛性及び気密性を確保しつつ、モータロータ40を駆動する際の磁気的な損失を抑制することができる。また、第1隙間G1が小さいので、モータステータ30とモータロータ40との磁気的結合を向上させることができ、モータロータ40を良好に回転駆動させることができる。
また、連結部15は、磁性体から構成される。連結部15は、軟磁性体であり、例えば、炭素濃度0.48%以下の低炭素鋼で形成される。低炭素鋼は、例えば、JIS規格で規定されたS45C等が例示される。このため、連結部15はシールドとして機能し、モータステータ30から発生した磁力(磁界)がレゾルバ60側に達することを抑制することができる。なお、連結部15の一部(連結天板部15aの内周面15c)は、真空雰囲気Va側に曝されるので、モータロータ40のロータヨーク41と同様の材料を用いることが好ましい。
より詳細には、径方向で、連結部15の内周面15cと、ロータヨーク41の外周面41cとの第3隙間G3は、0.1mm以上0.4mm以下程度である。また、連結部15の内周面15cと、ロータヨーク41の外周面41cとの第3隙間G3の、回転中心軸に沿った方向での長さは、1mm以上4mm以下程度である。さらに、連結部15のロータヨーク41と対向する部分の厚さtは、1mm以上である。ここで、厚さtは、連結部15の、ボルトBT10(図6参照)よりも径方向内側(ロータヨーク41側)での厚さである。
このような構成により、モータステータ30から発生した磁力(磁界)が、ロータヨーク41、第3隙間G3及び連結部15を通ってモータステータ30側に戻る磁気回路が形成される。これにより、励磁コイル35を流れる駆動電流Miにより発生する磁力(磁界)が、モータロータ40を伝搬しレゾルバ60側に達することを抑制することができる。この結果、モータ1は、レゾルバ60の位置情報の誤検出を抑制することができる。
以上のような構成により、第1軸受21A及び第2軸受21Bの摩耗により金属粉が発生した場合でも、第1軸受21Aの出力軸側に設けられた第1シール構造LS1(図4参照)及び第2軸受21Bのハウジングベース11側に設けられた第2シール構造LS2(図5参照)により、金属粉が真空雰囲気Va側に流出することを抑制できる。また、金属粉が第2軸受21Bの下側(ハウジングベース11側)からモータ1の内部に回り込んだ場合でも、(モータステータ30から発生した磁力(磁界)が壁部51(図5参照)越しに作用する)モータ隔壁50に吸着されたり、(モータステータ30から発生した磁力(磁界)が作用する)連結部15に吸着されたりするため、外部に流出することを抑制することができる。
次に、レゾルバ60の構成について説明する。図6は、実施形態に係るモータが有するレゾルバ及びレゾルバ隔壁を拡大して示す断面図である。図6に示すように、レゾルバステータ61A、61Bは、ハウジングアウタ13のフランジ部13aの上面に、ボルトBT12により固定される。
レゾルバステータ61A、61Bは、複数のステータ磁極が円周方向に等間隔に形成された環状の積層鉄心を有し、各ステータ磁極にレゾルバコイルが巻回されている。各レゾルバコイルには、検出信号(レゾルバ信号)Srが出力される配線が接続されている。
レゾルバロータ62A、62Bは、中空環状の積層鉄心により構成されており、出力軸17の外側の段差部17cに固定されている。レゾルバ60の配設位置は、軸方向でモータステータ30よりも出力軸17側であればよく、モータロータ40(出力軸17)の回転を検出することが可能であれば特に限定されない。
モータ1を制御するモータ制御回路90(図1参照)は、レゾルバ60の検出信号Srに基づいて、モータステータ30の励磁コイル35に駆動電流Miを供給する。具体的には、モータロータ40が回転すると、モータロータ40とともに出力軸17が回転し、連動してレゾルバロータ62A、62Bも回転する。これにより、レゾルバロータ62A、62Bと、レゾルバステータ61A、61Bとの間のリラクタンスが連続的に変化する。レゾルバステータ61A、61Bは、リラクタンスの変化を検出し、RDC93によって検出信号Srをデジタル信号に変換する。モータ1を制御するモータ制御回路90のCPU91は、RDC93の電気信号に基づいて、単位時間当たりのレゾルバロータ62A、62Bと連動する出力軸17及びモータロータ40の位置や回転角度を演算処理することができる。その結果、モータ制御回路90は、出力軸17の回転状態(例えば、回転速度、回転方向あるいは回転角度など)を計測することが可能となる。
レゾルバ隔壁70は、内側壁部71と、レゾルバ天板部72と、取付部73と、フランジ部74とを有する。内側壁部71は、軸方向に延在する筒状の部材であり、径方向で、レゾルバステータ61A、61Bとレゾルバロータ62A、62Bとの間に設けられる。
レゾルバ天板部72は、内側壁部71の上端に連結され、径方向外側に延在する。レゾルバ天板部72は、レゾルバステータ61A、61Bを覆って設けられる。また、レゾルバ天板部72の上面が、上述した隔壁上面70aとなる。取付部73は、レゾルバ天板部72よりも径方向外側に設けられ、レゾルバ天板部72よりも肉厚に形成される。取付部73は、ボルトBT11により、ハウジングアウタ13の上端に固定される。また、上述したように、取付部73は、ボルト等の固定部材により、チャンバ101の外壁に固定される。
フランジ部74は、内側壁部71の下端に連結され、径方向内側に延在する。フランジ部74は、連結部15の上面に重なって設けられ、ボルトBT10により連結部15に固定される。フランジ部74の下面と、連結部15の上面との間は、Oリング等の密封部材SL4によりシールされる。
このような構成により、レゾルバ隔壁70は、レゾルバロータ62A、62Bの配置された空間(真空雰囲気Va側)に、レゾルバステータ61A、61Bの配置された空間(大気雰囲気At側)の気体が流通しないように密閉することができる。すなわち、レゾルバステータ61A、61Bは、レゾルバ隔壁70と、ハウジングアウタ13と、連結部15とで囲まれた空間に設けられる。レゾルバロータ62A、62Bは、レゾルバ隔壁70と、出力軸17との間の空間に設けられる。
内側壁部71の外周面71aは、出力軸17の張出部17dの外周面と、第2隙間G2を有して対向して設けられる。言い換えると、第2隙間G2は、径方向でレゾルバ隔壁70とレゾルバロータ62A、62Bとの間に形成される隙間である。第2隙間G2は、第1隙間G1よりも大きく、かつ、第3隙間G3よりも大きい。
これにより、第1軸受21A及び第2軸受21Bの摩耗により金属粉が発生した場合でも、金属粉が第3隙間G3を通過する際に(モータステータ30から発生した磁力(磁界)が作用する)連結部15に吸着され、レゾルバ60側に流出することを抑制することができる。また、第2隙間G2が大きく形成されるので、メンテナンス等において、回転部(モータロータ40、レゾルバロータ62A、62B、出力軸17、第1軸受21A及び第2軸受21B)を、出力軸17側に容易に取り外すことができる。
次に、差動型のインクリメンタルレゾルバ60Aの詳細な構成について説明する。図7は、実施形態に係るモータが有するインクリメンタルレゾルバの構成を模式的に示す断面図である。図8は、モータ制御回路が有する信号処理回路の構成例を示すブロック図である。
図7に示すように、インクリメンタルレゾルバ60Aのレゾルバステータ61Aは、径方向内側に突出するN相、例えば3相18極の凸極A11-A16、B11-B16、C11-C16(第1の磁極)が所定間隔を有して設けられる。複数の凸極A11-A16、B11-B16、C11-C16のそれぞれの凸極の中間位置に3相18極の凸極A21-A26、B21-B26、C21-C26(第2の磁極)が、設けられる。これら複数の凸極は、A11、C21、B11、A21、C11、B21、A12、C22・・・の順に周方向に沿って配列される。各凸極A11-C26には、内周面側の端面に3つの歯TS1、TS2、TS3が設けられるとともに、中央部に1つの励磁巻線LA11-LC26が巻回されている。そのため、180度の位置の凸極は互いに同相となる。
レゾルバロータ62Aの外周面には、複数のスロット歯TRが形成されている。ここで、レゾルバロータ62Aのスロット歯TRのピッチは、例えば、レゾルバロータ62Aの隣接する3つの歯TRがレゾルバステータ61Aの凸極A11の歯TS1、TS2、TS3と一致しているものとすると、隣接する凸極C21の歯TS1、TS2、TS3はレゾルバロータ62Aのスロット歯TRに対して1/36ピッチ分機械的位相ずれを生じるように形成されている。
各凸極A11-C26の励磁巻線LA11-LC26は、図示は省略するが、励磁巻線LA11-LA16が直列に接続され、励磁巻線LB11-LB16が直列に接続され、励磁巻線LC11-LC16が直列に接続される。また、励磁巻線LA21-LA26が直列に接続され、励磁巻線LB21-LB26が直列に接続され、励磁巻線LC21-LC26が直列に接続される。
図8に示すように、インクリメンタルレゾルバ60Aから、レゾルバ信号fa1、fa2、fb1、fb2、fc1、fc2が、差動増幅回路95に出力される。レゾルバ信号fa1、fa2、fb1、fb2、fc1、fc2は、それぞれ、直列接続された励磁巻線LA11-LA16、LA21-LA26、LB11-LB16、LB21-LB26、LC11-LC16、LC21-LC26からの出力信号である。
より具体的には、レゾルバ信号fa1、fa2、fb1、fb2、fc1、fc2は、下記の式(1)から式(6)で表される。
fa1=A0+A1cosθ+A2cos2θ+A3cos3θ+A4cos4θ ・・・ (1)
fb1=A0+A1cos(θ-120°)+A2cos2(θ-120°)+A3cos3(θ-120°)+A4cos4(θ-120°) ・・・ (2)
fc1=A0+A1cos(θ+120°)+A2cos2(θ+120°)+A3cos3(θ+120°)+A4cos4(θ+120°) ・・・ (3)
fa2=A0+A1cos(θ+180°)+A2cos2(θ+180°)+A3cos3(θ+180°)+A4cos4(θ+180°) ・・・ (4)
fb2=A0+A1cos(θ-300°)+A2cos2(θ-300°)+A3cos3(θ-300°)+A4cos4(θ-300°) ・・・ (5)
fc2=A0+A1cos(θ+300°)+A2cos2(θ+300°)+A3cos3(θ+300°)+A4cos4(θ+300°) ・・・ (6)
fa1=A0+A1cosθ+A2cos2θ+A3cos3θ+A4cos4θ ・・・ (1)
fb1=A0+A1cos(θ-120°)+A2cos2(θ-120°)+A3cos3(θ-120°)+A4cos4(θ-120°) ・・・ (2)
fc1=A0+A1cos(θ+120°)+A2cos2(θ+120°)+A3cos3(θ+120°)+A4cos4(θ+120°) ・・・ (3)
fa2=A0+A1cos(θ+180°)+A2cos2(θ+180°)+A3cos3(θ+180°)+A4cos4(θ+180°) ・・・ (4)
fb2=A0+A1cos(θ-300°)+A2cos2(θ-300°)+A3cos3(θ-300°)+A4cos4(θ-300°) ・・・ (5)
fc2=A0+A1cos(θ+300°)+A2cos2(θ+300°)+A3cos3(θ+300°)+A4cos4(θ+300°) ・・・ (6)
レゾルバ信号fa1、fa2、fb1、fb2、fc1、fc2が、差動増幅回路95に供給されるので、差動増幅回路95の出力信号da、db、dcは、下記の式(7)、(8)、(9)で表される。ただし、出力信号daは、レゾルバ信号fa1と、レゾルバ信号fa2との差分として出力される信号である。出力信号dbは、レゾルバ信号fb1と、レゾルバ信号fb2との差分として出力される信号である。出力信号dcは、レゾルバ信号fc1と、レゾルバ信号fc2との差分として出力される信号である。
da=2A1cosθ+2A3cos3θ ・・・ (7)
db=2A1cos(θ-120°)+2A3cos3(θ-120°) ・・・ (8)
dc=2A1cos(θ+120°)+2A3cos3(θ+120°) ・・・ (9)
da=2A1cosθ+2A3cos3θ ・・・ (7)
db=2A1cos(θ-120°)+2A3cos3(θ-120°) ・・・ (8)
dc=2A1cos(θ+120°)+2A3cos3(θ+120°) ・・・ (9)
差動増幅回路95の3相の出力信号da、db、dcは、相変換回路96に供給される。相変換回路96は、出力信号da、db、dcを、下記の式(10)、(11)で表される、3次高調波歪を打ち消した2相交流信号fc(θ)およびfs(θ)に変換する。
fc(θ)=3A1cosθ/2=sinωt×cosθ ・・・ (10)
fs(θ)=3A1sinθ/2=sinωt×sinθ ・・・ (11)
fc(θ)=3A1cosθ/2=sinωt×cosθ ・・・ (10)
fs(θ)=3A1sinθ/2=sinωt×sinθ ・・・ (11)
これら2相交流信号fc(θ)、fs(θ)が信号処理回路(RDC93)に供給される。RDC93では、初期状態でカウンタ93fが零にクリアされており、これによってデジタル回転角度φが「0」にセットされる。
そのため、乗算器93aの乗算出力はsinωt×sinθとなり、乗算器93bの乗算出力は「0」となる。減算器93cの減算出力すなわちVsinωt×sin(θ-φ)はVsinωt×sinθとなり、これが同期整流器93dに供給される。同期整流器93dで励磁電圧成分が除去された出力Vsinθが出力され、これが速度検出信号としてCPU91(図1参照)に出力される。また、同期整流器93dの出力Vsinθは、電圧制御発振器93eに供給されて電圧に応じたパルス信号に変換され、これがカウンタ93fに供給される。これにより、カウンタ93fのカウント値(デジタル回転角度φ)が位相角θと等しい値となる。
この状態で、レゾルバロータ62Aが同一方向に回転を継続すると、減算器93cの出力が位相角θのデジタル回転角度φに対する増加分だけ増加し、これに応じて同期整流器93dの出力も位相角θの増加分だけ増加することから、カウンタ93fのカウント値が位相角θの増加分だけカウントアップされて、レゾルバロータ62Aの回転に応じた現在のデジタル回転角度φが出力される。
そして、CPU91により、インクリメンタルレゾルバ60Aからの速度検出信号等に基づいて回転速度や位置決めの制御が行われる。このように、インクリメンタルレゾルバ60Aとして差動型レゾルバが採用されているので、モータステータ30から発生する磁力(磁界)による誤検出を抑制することができる。
次に、モータ1のCPU91が有するレゾルバ60(インクリメンタルレゾルバ60A及びアブソリュートレゾルバ60B)の動作シーケンスの一例について説明する。図9は、インクリメンタルレゾルバ及びアブソリュートレゾルバの駆動方法を説明するためのフローチャート図である。
図9に示すように、モータ1の電源投入時に、CPU91は、まずアブソリュートレゾルバ60Bを励磁する(ステップST1)。これにより、CPU91は、アブソリュートレゾルバ60Bからの絶対角度情報に基づいて、電源投入時のモータロータ40の角度(位置)を確定することができる。
次に、CPU91は、アブソリュートレゾルバ60Bの励磁を停止し(ステップST2)、インクリメンタルレゾルバ60Aを励磁する(ステップST3)。これにより、CPU91は、上述したように、インクリメンタルレゾルバ60Aからのレゾルバ信号fa1、fa2、fb1、fb2、fc1、fc2に基づいて、精密な位置を検出することができる。
CPU91は、インクリメンタルレゾルバ60Aからの位置情報、速度検出信号等に基づいてモータ1を駆動し(ステップST4)、回転速度や位置決めの制御を実行する。アブソリュートレゾルバ60Bは、モータ1の駆動時には、モータステータ30から発生する磁力(磁界)を遮蔽するシールドとして機能し、モータステータ30から発生する磁力(磁界)がインクリメンタルレゾルバ60A側に達することを抑制することができる。
なお、上述したモータ1の各構成要素の形状や構成はあくまで一例であり、適宜変更してもよい。例えば、レゾルバ隔壁70は一体に形成される場合に限定されず、複数に分割されていてもよい。また、各構成要素の固定構造やシール構造も適宜変更してもよい。
以上説明したように、本実施形態のモータ1は、ハウジング10と、モータステータ30と、モータロータ40と、軸受(第1軸受21A及び第2軸受21B)と、シール構造LSと、レゾルバ60と、を有する。ハウジング10は、ハウジングベース11と、ハウジングベース11に設けられ、回転中心軸AXに沿った方向に延在するハウジング軸部12と、を含む。モータステータ30は、ハウジング軸部12の径方向外側に配置される。モータロータ40は、モータステータ30とハウジング軸部12との間に設けられる。軸受は、モータロータ40の径方向内側に設けられ、モータロータ40をハウジング軸部12に回転可能に支持する。シール構造LSは、モータロータ40の出力軸17側で、モータロータ40とハウジング軸部12との間を密封する。レゾルバ60は、モータロータ40の回転を検出する。レゾルバ60は、軸受よりも径方向外側であって、かつ、回転中心軸AXに沿った方向で、モータステータ30よりも出力軸17側に設けられる。
これによれば、軸受は、モータロータ40の径方向内側に設けられる。モータロータ40の出力軸17側は、使用時に蓋等で封止されるため、軸受での発塵が外部の、例えば真空雰囲気Va側へ流出することを抑制できる。また、軸受の摩耗により発生した発塵(金属粉)がモータ1内部に回り込んだ場合でも、(モータステータ30の磁力(磁界)により)モータ隔壁50に金属粉が吸着される。したがって、モータ1は、内部で発生した発塵が外部に流出することを抑制することができる。また、レゾルバ60側に金属粉が流出することが抑制されるので、レゾルバ60の検出精度の低下を抑制することができる。
また、モータ1は、モータステータ30とモータロータ40との間に設けられ、モータステータ30の配置された空間とモータロータ40の配置された空間とを区分するモータ隔壁50を有する。これによれば、モータ隔壁50により、モータステータ30が配置された大気雰囲気側の気体が、モータロータ40が配置された真空雰囲気側に流出することを抑制することができる。
また、モータ1において、レゾルバ60は、モータロータ40に連結されたレゾルバロータ62A、62Bと、レゾルバロータ62A、62Bの径方向外側に設けられ、励磁コイルを有するレゾルバステータ61A、61Bと、を有し、レゾルバロータ62A、62Bとレゾルバステータ61A、61Bとの間にレゾルバ隔壁70が設けられる。これによれば、レゾルバ隔壁70により、レゾルバロータ62A、62Bが配置された空間とレゾルバステータ61A、61Bが配置された空間とが区分され、レゾルバステータ61A、61Bが配置された大気側の気体が、レゾルバロータ62A、62Bが配置された真空雰囲気側に流出することを抑制することができる。また、角度検出器としてレゾルバ60が用いられ、モータ1内に電子的な素子が配置されない。このため、モータ1が高温環境下で使用される場合であっても、良好に角度を検出できる。
また、モータ1において、モータロータ40の外径は、レゾルバロータ62A、62Bの外径よりも小さい。これによれば、モータロータ40及びレゾルバロータ62A、62Bを含む回転構造体を、出力軸17側から一体に引き抜くことができるので、軸受(第1軸受21A及び第2軸受21B)の交換やメンテナンスが容易である。
また、モータ1において、軸受(第1軸受21A及び第2軸受21B)は、無潤滑であり、ハウジング軸部12に設けられた内輪22と、モータロータ40に設けられた外輪23と、内輪22と外輪23との間に設けられた転動体24と、を有し、内輪22、外輪23及び転動体24のうち、少なくとも転動体24はセラミックス製である。これによれば、軸受の転動体24からの、摩耗による発塵や、高温環境下での発ガスを抑制することができる。
また、モータ1において、軸受(第1軸受21A及び第2軸受21B)は、無潤滑であり、ハウジング軸部12に設けられた内輪22と、モータロータ40に設けられた外輪23と、内輪22と外輪23との間に設けられた転動体24と、を有し、内輪22及び外輪23は、磁性のある鉄系部材が使用される。これによれば、軸受の摩耗による発塵がモータ1の内部に回り込んだ場合でも、良好にモータステータ30やモータロータ40の永久磁石に金属粉が吸着される。
また、モータ1において、回転中心軸AXに沿った方向で、モータステータ30とレゾルバ60との間に磁性体から構成される連結部15が配置されている。これによれば、連結部15は、モータステータ30から発生する磁力(磁界)をシールドすることができるので、レゾルバ60の検出精度を向上させることができる。また、連結部15は、摩耗により発生した金属粉を吸着することができる。
また、モータ1は、モータロータ40の出力軸17側に設けられ、軸受の外輪23に固定される外輪押さえ部(段差部17b)と、ハウジング軸部12の出力軸17側に設けられ、軸受の内輪22に固定される内輪押さえ部16と、を有し、シール構造LSは、外輪押さえ部と内輪押さえ部16とで形成されたラビリンス構造を有する。これによれば、軸受の摩耗等で発生するモータ1からの発塵が、シール構造LSで遮蔽され、外部に流出することを抑制することができる。
また、モータ1において、モータステータ30は、モータロータ40の配置された空間よりも大気側の空間に配置される。これによれば、モータステータ30がモータロータ40と同じ空間、例えば真空雰囲気Vaに配置された場合に比べて、モータステータ30の冷却効率を高めることができる。
また、モータ1において、モータロータ40は、サマリウムコバルト永久磁石を含む。これによれば、モータ1が高温環境で使用された場合であってもマグネット42が減磁しないので、良好にモータロータ40を回転駆動させることができる。
また、モータ1において、レゾルバ60の検出信号Srに基づいて、モータステータ30の励磁コイル35に駆動電流Miを供給するモータ制御回路90を備える。これによれば、モータ制御回路90は、レゾルバ60の検出信号Srに基づいて、回転トルクや速度リップルを常時監視することができる。これにより、例えば軸受の異常の発生等を早期に発見することができ、あるいは、軸受の交換時期を把握することができる。
(第1変形例)
図10は、第1変形例に係るモータを模式的に示す断面図である。図10に示すように、第1変形例に係るモータ1Aは、上述した実施形態と比べて、ハウジング10のハウジング軸部12Aが中実の柱状である構成が異なる。すなわち、ハウジング軸部12Aの内部には内部空間SPが形成されていない。これにより、第1変形例に係るモータ1Aは、ハウジング10の構成を簡易にすることができる。また、内輪押さえ部16Aも開口を有さない円板状とすることができる。また、本変形例では、内部空間SPを密封するための蓋部14(図2参照)を設ける必要がない。このため、内部空間SPと大気雰囲気Atとの間のシール構造(図5の密封部材SL1参照)も省略することができる。
図10は、第1変形例に係るモータを模式的に示す断面図である。図10に示すように、第1変形例に係るモータ1Aは、上述した実施形態と比べて、ハウジング10のハウジング軸部12Aが中実の柱状である構成が異なる。すなわち、ハウジング軸部12Aの内部には内部空間SPが形成されていない。これにより、第1変形例に係るモータ1Aは、ハウジング10の構成を簡易にすることができる。また、内輪押さえ部16Aも開口を有さない円板状とすることができる。また、本変形例では、内部空間SPを密封するための蓋部14(図2参照)を設ける必要がない。このため、内部空間SPと大気雰囲気Atとの間のシール構造(図5の密封部材SL1参照)も省略することができる。
(第2変形例)
図11は、第2変形例に係るモータの一部を模式的に示す平面図である。図12は、モータ巻線が設けられたモータの一部を模式的に示す平面図である。図11は、モータ1Bの一部、具体的には、モータステータ30A及びモータロータ40を模式的に示す平面図である。
図11は、第2変形例に係るモータの一部を模式的に示す平面図である。図12は、モータ巻線が設けられたモータの一部を模式的に示す平面図である。図11は、モータ1Bの一部、具体的には、モータステータ30A及びモータロータ40を模式的に示す平面図である。
図11に示すように、モータステータ30Aは、ステータコア31Aと、インシュレータ34(図12参照)と、モータ巻線35a(励磁コイル35)(図12参照)とを含む。ステータコア31Aは、バックヨーク32Aとティース33A(突極)とを有する。バックヨーク32Aは、環状の部材であり、ティース33Aは、バックヨーク32Aに周方向に複数配置され、等間隔で並ぶ。ティース33Aは、それぞれ、バックヨーク32Aの内周面から径方向内側に突出して、ストレート形状に形成される。すなわち、ティース33Aは、延在方向の端部で、周方向に突出する部分を有さず、延在方向に沿って一定の幅を有して形成される。
励磁コイル35は、インシュレータ34を介してステータコア31Aのティース33Aにそれぞれ巻きつけられる。第2変形例では、ティース33Aは、ストレート形状に形成されるので、モータ巻線35aは、あらかじめ外部で巻き回され励磁コイル35として形成された状態で、ティース33Aに挿入される。これにより、ティース33Aにモータ巻線35aを巻き回して励磁コイル35を形成する場合に比べて、モータ巻線35aの巻数(占積率)を向上させることができ、この結果、モータ巻線35aに流れる駆動電流Miによるモータ1Bの温度上昇を抑制することができる。
(第3変形例)
図13は、第3変形例に係るモータの、第1軸受を拡大して示す断面図である。図13に示すように、第3変形例に係るモータ1Cにおいて、上述した実施形態、第1変形例及び第2変形例と比べて、第1軸受21Aが、予圧ばね18により定圧予圧が付与される定圧予圧方式の回転支持構造が形成される構成が異なる。
図13は、第3変形例に係るモータの、第1軸受を拡大して示す断面図である。図13に示すように、第3変形例に係るモータ1Cにおいて、上述した実施形態、第1変形例及び第2変形例と比べて、第1軸受21Aが、予圧ばね18により定圧予圧が付与される定圧予圧方式の回転支持構造が形成される構成が異なる。
第1軸受21Aの外輪23は、外輪間座26により位置決めされ、内輪22は、予圧ばね18により定圧予圧が付与される。つまり、第3変形例では、内輪間座25(図4参照)が設けられていない。より詳細には、内輪押さえ部16Aは、第1軸受21Aの内輪22の内周側及び上側を覆うように設けられる。内輪押さえ部16Aのフランジ部16Aaは、径方向内側に突出して設けられ、ボルトBT1によりハウジング軸部12に固定される。
重畳部16Acは、第1軸受21Aの内輪22のハウジングベース11と反対側に設けられる。重畳部16Acは、第1軸受21Aの内輪22の上側、及び、内輪22と外輪23との隙間を覆って配置される。重畳部16Acには、下側(内輪22側)に開口する溝部16Abが設けられる。予圧ばね18は、溝部16Ab内に配置される。溝部16Abは、周方向に沿って環状に形成され、予圧ばね18は、内輪22に沿って周方向に複数配置される。また、予圧ばね18と内輪22との間にプレート19が設けられる。プレート19は、重畳部16Ac(溝部16Ab)と対向する環状の部材であり、プレート19の上面と、重畳部16Acの下面とは、非接触に配置される。
このような構成により、予圧ばね18は、第1軸受21Aに定圧予圧を付与することができる。したがって、モータ1Cが高温環境下で使用される場合であっても、定位置予圧に比べて予圧の変化を抑制することができる。
なお、第3変形例では、重畳部16Acの上面及び外周面と、出力軸17の内周面及びフランジ部17aとの間の微小隙間により第1シール構造LS1が構成される。なお、図13に示す予圧ばね18は、圧縮コイルばねである。ただしこれに限定されず、予圧ばね18は、定圧予圧を付与できる構成であればよく、他の種類のばねであってもよい。また、予圧ばね18を保持する内輪押さえ部16Aの構成もあくまで一例であり、適宜変更することができる。
(第4変形例)
図14は、第4変形例に係るモータの、第1軸受を拡大して示す断面図である。図14に示すように、第4変形例に係るモータ1Dは、上述した第3変形例と同様に、予圧ばね18により定圧予圧が付与される定圧予圧方式の回転支持構造が形成される。第4変形例では、第3変形例に対して、外輪間座26が受け部26aを有する構成が異なる。受け部26aは、外輪間座26の内周面から径方向内側に突出し、外輪23と内輪22との隙間を覆って設けられる。受け部26aの第1軸受21Aと対向する面には、溝部26bが形成される。受け部26a及び溝部26bは、第1軸受21Aと重畳して環状に形成される。
図14は、第4変形例に係るモータの、第1軸受を拡大して示す断面図である。図14に示すように、第4変形例に係るモータ1Dは、上述した第3変形例と同様に、予圧ばね18により定圧予圧が付与される定圧予圧方式の回転支持構造が形成される。第4変形例では、第3変形例に対して、外輪間座26が受け部26aを有する構成が異なる。受け部26aは、外輪間座26の内周面から径方向内側に突出し、外輪23と内輪22との隙間を覆って設けられる。受け部26aの第1軸受21Aと対向する面には、溝部26bが形成される。受け部26a及び溝部26bは、第1軸受21Aと重畳して環状に形成される。
これにより、第4変形例のモータ1Dは、第1軸受21Aの摩耗により発生した発塵が、受け部26aに溜められるので、発塵が第1シール構造LS1及び第2シール構造LS2の外部に流出しすることを抑制できる。
さらに、本実施形態のモータ1は、以下の態様をとることができる。
(1-1)前記モータステータは、電磁鋼板を重ね合わせて形成され、バックヨークと突極とを有するステータコアと、前記突極に設けられ、耐熱性を有するモータ巻線と、
を有し、
前記モータロータは、磁性体で形成されるロータヨークと、前記ロータヨークに設けられる複数のマグネットと、を有し、
前記モータ隔壁は、非磁性体で構成される。
(1-2)前記ステータコアは、前記モータ隔壁を介して複数の前記マグネットの径方向外側に配置される。
(1-3)前記ステータコアは、接着鋼板又は型内かしめで形成される。
(1-4)前記突極は、前記バックヨークの内周面から径方向内側に突出してストレート形状に形成される。
(1-5)前記ステータコアは、前記ハウジングに対してボルトで締結される。
(1-6)前記ハウジングは、前記ハウジング軸部の径方向外側に設けられる筒状のハウジングアウタを有し、
前記モータステータは、前記ハウジングアウタの内周面と空間を有して対向して配置される。
(1-7)前記ステータコアと前記モータ巻線とを絶縁する絶縁材を有し、
前記モータ巻線及び前記絶縁材は、200℃以上の耐熱性を有する。
(1-8)前記モータ隔壁の厚さは、前記マグネットと前記ステータコアとの間の隙間の40%以上80%以下である。
(1-9)前記モータ隔壁は、オーステナイト系ステンレス鋼で形成される。
(1-10)前記マグネットは、サマリウムコバルト永久磁石である。
(1-1)前記モータステータは、電磁鋼板を重ね合わせて形成され、バックヨークと突極とを有するステータコアと、前記突極に設けられ、耐熱性を有するモータ巻線と、
を有し、
前記モータロータは、磁性体で形成されるロータヨークと、前記ロータヨークに設けられる複数のマグネットと、を有し、
前記モータ隔壁は、非磁性体で構成される。
(1-2)前記ステータコアは、前記モータ隔壁を介して複数の前記マグネットの径方向外側に配置される。
(1-3)前記ステータコアは、接着鋼板又は型内かしめで形成される。
(1-4)前記突極は、前記バックヨークの内周面から径方向内側に突出してストレート形状に形成される。
(1-5)前記ステータコアは、前記ハウジングに対してボルトで締結される。
(1-6)前記ハウジングは、前記ハウジング軸部の径方向外側に設けられる筒状のハウジングアウタを有し、
前記モータステータは、前記ハウジングアウタの内周面と空間を有して対向して配置される。
(1-7)前記ステータコアと前記モータ巻線とを絶縁する絶縁材を有し、
前記モータ巻線及び前記絶縁材は、200℃以上の耐熱性を有する。
(1-8)前記モータ隔壁の厚さは、前記マグネットと前記ステータコアとの間の隙間の40%以上80%以下である。
(1-9)前記モータ隔壁は、オーステナイト系ステンレス鋼で形成される。
(1-10)前記マグネットは、サマリウムコバルト永久磁石である。
(2-1)前記回転中心軸に沿った方向で、前記モータステータと前記レゾルバとの間に磁性体から構成される連結部が配置されており、
前記連結部は、前記モータロータの径方向外側に配置され、かつ、前記モータステータの前記レゾルバ側を覆って設けられ、前記モータステータに固定される。
(2-2)前記連結部は、炭素濃度0.45%以下の低炭素鋼で形成される。
(2-3)前記モータロータと前記連結部との間隔の、径方向での長さは、0.1mm以上0.4mm以下であり、
前記モータロータと前記連結部との間隔の、前記回転中心軸に沿った方向での長さは、1mm以上4mm以下である。
(2-4)前記ハウジングは、前記ハウジング軸部の径方向外側に設けられ、筒状のハウジングアウタを有し、
前記モータステータは、前記ハウジングアウタの内周面と空間を有して対向して配置され、
前記ハウジングアウタは非磁性体で形成され、前記連結部は、前記ハウジングアウタに固定される。
前記連結部は、前記モータロータの径方向外側に配置され、かつ、前記モータステータの前記レゾルバ側を覆って設けられ、前記モータステータに固定される。
(2-2)前記連結部は、炭素濃度0.45%以下の低炭素鋼で形成される。
(2-3)前記モータロータと前記連結部との間隔の、径方向での長さは、0.1mm以上0.4mm以下であり、
前記モータロータと前記連結部との間隔の、前記回転中心軸に沿った方向での長さは、1mm以上4mm以下である。
(2-4)前記ハウジングは、前記ハウジング軸部の径方向外側に設けられ、筒状のハウジングアウタを有し、
前記モータステータは、前記ハウジングアウタの内周面と空間を有して対向して配置され、
前記ハウジングアウタは非磁性体で形成され、前記連結部は、前記ハウジングアウタに固定される。
(3-1)前記レゾルバは、差動型のインクリメンタルレゾルバを含む。
(3-2)前記レゾルバは、さらにアブソリュートレゾルバを含み、
前記回転中心軸に沿った方向で、前記モータステータ、前記アブソリュートレゾルバ、前記インクリメンタルレゾルバの順に配置される。
(3-3)前記アブソリュートレゾルバ及び前記インクリメンタルレゾルバは、それぞれ、励磁コイルを有するレゾルバステータと、前記レゾルバステータの径方向内側に設けられたレゾルバロータと、を有し、
前記アブソリュートレゾルバの前記レゾルバロータは、低炭素鋼で形成される。
(3-4)前記アブソリュートレゾルバ及び前記インクリメンタルレゾルバは、それぞれ、励磁コイルを有するレゾルバステータと、前記レゾルバステータの径方向内側に設けられたレゾルバロータと、を有し、
前記インクリメンタルレゾルバの前記レゾルバロータは、低炭素鋼で形成され、複数の凸極を有して構成される。
(3-5)前記レゾルバは、励磁コイルを有するレゾルバステータと、前記レゾルバステータの径方向内側に設けられたレゾルバロータと、を有し、
前記レゾルバロータと前記レゾルバステータとの間に、非磁性体で形成されるレゾルバ隔壁が設けられる。
(3-2)前記レゾルバは、さらにアブソリュートレゾルバを含み、
前記回転中心軸に沿った方向で、前記モータステータ、前記アブソリュートレゾルバ、前記インクリメンタルレゾルバの順に配置される。
(3-3)前記アブソリュートレゾルバ及び前記インクリメンタルレゾルバは、それぞれ、励磁コイルを有するレゾルバステータと、前記レゾルバステータの径方向内側に設けられたレゾルバロータと、を有し、
前記アブソリュートレゾルバの前記レゾルバロータは、低炭素鋼で形成される。
(3-4)前記アブソリュートレゾルバ及び前記インクリメンタルレゾルバは、それぞれ、励磁コイルを有するレゾルバステータと、前記レゾルバステータの径方向内側に設けられたレゾルバロータと、を有し、
前記インクリメンタルレゾルバの前記レゾルバロータは、低炭素鋼で形成され、複数の凸極を有して構成される。
(3-5)前記レゾルバは、励磁コイルを有するレゾルバステータと、前記レゾルバステータの径方向内側に設けられたレゾルバロータと、を有し、
前記レゾルバロータと前記レゾルバステータとの間に、非磁性体で形成されるレゾルバ隔壁が設けられる。
(4-1)前記モータロータの軸方向で前記ハウジングベースと反対側に設けられ、前記軸受の外輪に固定される外輪押さえ部と、
前記ハウジング軸部の軸方向で前記ハウジングベースと反対側に設けられ、前記軸受の内輪に固定される内輪押さえ部と、を有し、
前記レゾルバは、前記モータロータに連結されたレゾルバロータと、前記レゾルバロータの径方向外側に設けられ、励磁コイルを有するレゾルバステータと、を有し、前記軸受よりも径方向外側であって、かつ、前記回転中心軸に沿った方向で、前記モータステータよりも軸方向で前記ハウジングベースと反対側に設けられ、
前記モータロータの外径は、前記レゾルバロータの外径よりも小さい。
(4-2)前記モータロータは、ロータヨーク及び前記ロータヨークの外周に沿って設けられた複数の磁石を有し、
前記レゾルバ隔壁の内径は、前記磁石の外径よりも大きい。
(4-3)前記回転中心軸に沿った方向で、前記モータステータと前記レゾルバとの間に設けられ、磁性体から構成される連結部を有し、
前記モータロータは、ロータヨーク及び前記ロータヨークの外周に沿って設けられた複数の磁石を有し、
前記連結部の内径は、前記磁石の外径よりも大きい。
(4-4)前記軸受は、前記ロータヨークの径方向内側に配置される。
(4-5)径方向で、前記軸受と前記ハウジング軸部との間に隙間が形成される。
(4-6)前記モータロータの軸方向で前記ハウジングベースと反対側に設けられる出力軸を有し、
前記モータロータの軸方向で前記ハウジングベースと反対側の端部には、軸方向に突出する突出部が設けられ、
前記出力軸は、前記突出部の径方向内側に固定される。
(4-7)前記連結部は、前記モータロータの径方向外側に配置され、かつ、前記モータステータの前記レゾルバ側を覆って設けられ、前記モータステータに固定される。
前記ハウジング軸部の軸方向で前記ハウジングベースと反対側に設けられ、前記軸受の内輪に固定される内輪押さえ部と、を有し、
前記レゾルバは、前記モータロータに連結されたレゾルバロータと、前記レゾルバロータの径方向外側に設けられ、励磁コイルを有するレゾルバステータと、を有し、前記軸受よりも径方向外側であって、かつ、前記回転中心軸に沿った方向で、前記モータステータよりも軸方向で前記ハウジングベースと反対側に設けられ、
前記モータロータの外径は、前記レゾルバロータの外径よりも小さい。
(4-2)前記モータロータは、ロータヨーク及び前記ロータヨークの外周に沿って設けられた複数の磁石を有し、
前記レゾルバ隔壁の内径は、前記磁石の外径よりも大きい。
(4-3)前記回転中心軸に沿った方向で、前記モータステータと前記レゾルバとの間に設けられ、磁性体から構成される連結部を有し、
前記モータロータは、ロータヨーク及び前記ロータヨークの外周に沿って設けられた複数の磁石を有し、
前記連結部の内径は、前記磁石の外径よりも大きい。
(4-4)前記軸受は、前記ロータヨークの径方向内側に配置される。
(4-5)径方向で、前記軸受と前記ハウジング軸部との間に隙間が形成される。
(4-6)前記モータロータの軸方向で前記ハウジングベースと反対側に設けられる出力軸を有し、
前記モータロータの軸方向で前記ハウジングベースと反対側の端部には、軸方向に突出する突出部が設けられ、
前記出力軸は、前記突出部の径方向内側に固定される。
(4-7)前記連結部は、前記モータロータの径方向外側に配置され、かつ、前記モータステータの前記レゾルバ側を覆って設けられ、前記モータステータに固定される。
(5-1)前記モータロータの軸方向で、前記軸受の前記ハウジングベースと反対側に設けられ、前記モータロータと前記ハウジング軸部との間を密封する第1シール構造と、
前記モータロータの軸方向で、前記軸受の前記ハウジングベース側に設けられ、前記モータロータと前記ハウジングベースとの間を密封する第2シール構造と、
前記モータロータの回転を検出するレゾルバと、を有し、
前記レゾルバは、前記軸受よりも径方向外側であって、かつ、前記回転中心軸に沿った方向で、前記モータステータよりも軸方向で前記ハウジングベースと反対側に設けられ、
前記軸受は、無潤滑であり、前記ハウジング軸部に設けられた内輪と、前記モータロータに設けられた外輪と、前記内輪と前記外輪との間に設けられた転動体と、を有する。
(5-2)前記軸受の前記内輪、前記外輪及び前記転動体のうち、少なくとも前記転動体はセラミックス製である。
(5-3)前記軸受の前記内輪及び前記外輪は、磁性を有するステンレス鋼で形成される。
(5-4)前記モータロータは、ロータヨーク及び前記ロータヨークの外周に沿って設けられた複数の磁石を有し、
前記ロータヨークは、複数の前記磁石の径方向内側に配置され、
前記軸受は、前記ロータヨークの径方向内側に配置される。
(5-5)前記軸受は、背面組合せで配列された複数のアンギュラ玉軸受を有する。
(5-6)前記第1シール構造及び前記第2シール構造の少なくとも一方は、0.05mm以上0.15mm以下の隙間で形成されたラビリンス構造を有する。
(5-7)前記軸受は、前記軸方向に沿って配列された第1軸受及び第2軸受を有し、
前記第1軸受の内輪と前記第2軸受の内輪との間に設けられた内輪間座と、
前記第1軸受の外輪と前記第2軸受の外輪との間に設けられた外輪間座と、を有する。
(5-8)前記軸受の内輪の、前記ハウジングベースと反対側に設けられ、前記ハウジング軸部に固定される内輪押さえ部と、
前記内輪押さえ部と前記軸受との間に設けられ、前記軸受に定圧予圧を付与する予圧ばねと、を有する。
(5-9)前記軸受は、前記軸方向に沿って配列された第1軸受及び第2軸受を有し、
前記第1軸受の外輪と前記第2軸受の外輪との間に設けられた外輪間座と、
前記外輪間座の内周面から径方向内側に突出し、前記外輪と前記内輪との隙間を覆って設けられる受け部と、を有する。
前記モータロータの軸方向で、前記軸受の前記ハウジングベース側に設けられ、前記モータロータと前記ハウジングベースとの間を密封する第2シール構造と、
前記モータロータの回転を検出するレゾルバと、を有し、
前記レゾルバは、前記軸受よりも径方向外側であって、かつ、前記回転中心軸に沿った方向で、前記モータステータよりも軸方向で前記ハウジングベースと反対側に設けられ、
前記軸受は、無潤滑であり、前記ハウジング軸部に設けられた内輪と、前記モータロータに設けられた外輪と、前記内輪と前記外輪との間に設けられた転動体と、を有する。
(5-2)前記軸受の前記内輪、前記外輪及び前記転動体のうち、少なくとも前記転動体はセラミックス製である。
(5-3)前記軸受の前記内輪及び前記外輪は、磁性を有するステンレス鋼で形成される。
(5-4)前記モータロータは、ロータヨーク及び前記ロータヨークの外周に沿って設けられた複数の磁石を有し、
前記ロータヨークは、複数の前記磁石の径方向内側に配置され、
前記軸受は、前記ロータヨークの径方向内側に配置される。
(5-5)前記軸受は、背面組合せで配列された複数のアンギュラ玉軸受を有する。
(5-6)前記第1シール構造及び前記第2シール構造の少なくとも一方は、0.05mm以上0.15mm以下の隙間で形成されたラビリンス構造を有する。
(5-7)前記軸受は、前記軸方向に沿って配列された第1軸受及び第2軸受を有し、
前記第1軸受の内輪と前記第2軸受の内輪との間に設けられた内輪間座と、
前記第1軸受の外輪と前記第2軸受の外輪との間に設けられた外輪間座と、を有する。
(5-8)前記軸受の内輪の、前記ハウジングベースと反対側に設けられ、前記ハウジング軸部に固定される内輪押さえ部と、
前記内輪押さえ部と前記軸受との間に設けられ、前記軸受に定圧予圧を付与する予圧ばねと、を有する。
(5-9)前記軸受は、前記軸方向に沿って配列された第1軸受及び第2軸受を有し、
前記第1軸受の外輪と前記第2軸受の外輪との間に設けられた外輪間座と、
前記外輪間座の内周面から径方向内側に突出し、前記外輪と前記内輪との隙間を覆って設けられる受け部と、を有する。
1、1A、1B、1C、1D モータ
10 ハウジング
11 ハウジングベース
12 ハウジング軸部
15 連結部
17 出力軸
21A 第1軸受
21B 第2軸受
22 内輪
23 外輪
24 転動体
30 モータステータ
40 モータロータ
41 ロータヨーク
50 モータ隔壁
60 レゾルバ
60A インクリメンタルレゾルバ
60B アブソリュートレゾルバ
61A、61B レゾルバステータ
62A、62B レゾルバロータ
70 レゾルバ隔壁
90 モータ制御回路
100 半導体製造装置
101 チャンバ
111 搬送テーブル
At 大気雰囲気
Va 真空雰囲気
10 ハウジング
11 ハウジングベース
12 ハウジング軸部
15 連結部
17 出力軸
21A 第1軸受
21B 第2軸受
22 内輪
23 外輪
24 転動体
30 モータステータ
40 モータロータ
41 ロータヨーク
50 モータ隔壁
60 レゾルバ
60A インクリメンタルレゾルバ
60B アブソリュートレゾルバ
61A、61B レゾルバステータ
62A、62B レゾルバロータ
70 レゾルバ隔壁
90 モータ制御回路
100 半導体製造装置
101 チャンバ
111 搬送テーブル
At 大気雰囲気
Va 真空雰囲気
Claims (11)
- ハウジングベースと、前記ハウジングベースに設けられ、回転中心軸に沿った方向に延在するハウジング軸部と、を含むハウジングと、
前記ハウジング軸部の径方向外側に配置されたモータステータと、
前記モータステータと前記ハウジング軸部との間に設けられたモータロータと、
前記モータロータの径方向内側に設けられ、前記モータロータを前記ハウジング軸部に回転可能に支持する軸受と、
前記モータロータの軸方向で前記ハウジングベースと反対側に設けられ、前記モータロータと前記ハウジング軸部との間を密封するシール構造と、
前記モータロータの回転を検出するレゾルバと、を有し、
前記レゾルバは、前記軸受よりも径方向外側であって、かつ、前記回転中心軸に沿った方向で、前記モータステータよりも軸方向で前記ハウジングベースと反対側に設けられる
モータ。 - 前記モータステータと前記モータロータとの間に設けられ、前記モータステータの配置された空間と前記モータロータの配置された空間とを区分するモータ隔壁を有する
請求項1に記載のモータ。 - 前記レゾルバは、前記モータロータに連結されたレゾルバロータと、前記レゾルバロータの径方向外側に設けられ、励磁コイルを有するレゾルバステータと、を有し、
前記レゾルバロータと前記レゾルバステータとの間にレゾルバ隔壁が設けられる
請求項2に記載のモータ。 - 前記モータロータの外径は、前記レゾルバロータの外径よりも小さい
請求項3に記載のモータ。 - 前記軸受は、無潤滑であり、前記ハウジング軸部に設けられた内輪と、前記モータロータに設けられた外輪と、前記内輪と前記外輪との間に設けられた転動体と、を有し、
前記内輪、前記外輪及び前記転動体のうち、少なくとも前記転動体はセラミックス製である
請求項1から請求項4のいずれか1項に記載のモータ。 - 前記軸受は、無潤滑であり、前記ハウジング軸部に設けられた内輪と、前記モータロータに設けられた外輪と、前記内輪と前記外輪との間に設けられた転動体と、を有し、
前記内輪及び前記外輪は、磁性のある鉄系部材が使用される
請求項1から請求項5のいずれか1項に記載のモータ。 - 前記回転中心軸に沿った方向で、前記モータステータと前記レゾルバとの間に磁性体から構成される連結部が配置されている
請求項1から請求項6のいずれか1項に記載のモータ。 - 前記モータロータの軸方向で前記ハウジングベースと反対側に設けられ、前記軸受の外輪に固定される外輪押さえ部と、前記ハウジング軸部の軸方向で前記ハウジングベースと反対側に設けられ、前記軸受の内輪に固定される内輪押さえ部と、を有し、
前記シール構造は、前記外輪押さえ部と前記内輪押さえ部とで形成されたラビリンス構造を有する
請求項1から請求項7のいずれか1項に記載のモータ。 - 前記モータステータは、前記モータロータの配置された空間よりも大気側の空間に配置される
請求項1から請求項8のいずれか1項に記載のモータ。 - 前記モータロータは、サマリウムコバルト永久磁石を含む
請求項1から請求項9のいずれか1項に記載のモータ。 - 前記レゾルバの検出信号に基づいて、前記モータステータの励磁コイルに駆動電流を供給するモータ制御回路を備える
請求項1から請求項10のいずれか1項に記載のモータ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/786,957 US20230037848A1 (en) | 2020-01-27 | 2021-01-26 | Motor |
| CN202180009697.7A CN114982100A (zh) | 2020-01-27 | 2021-01-26 | 电动机 |
| EP21746926.1A EP4047791A4 (en) | 2020-01-27 | 2021-01-26 | ENGINE |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020-010994 | 2020-01-27 | ||
| JP2020010994 | 2020-01-27 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021153540A1 true WO2021153540A1 (ja) | 2021-08-05 |
Family
ID=77079059
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/002569 WO2021153540A1 (ja) | 2020-01-27 | 2021-01-26 | モータ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20230037848A1 (ja) |
| EP (1) | EP4047791A4 (ja) |
| JP (5) | JP2021118677A (ja) |
| CN (1) | CN114982100A (ja) |
| WO (1) | WO2021153540A1 (ja) |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000032701A (ja) * | 1998-07-09 | 2000-01-28 | Nippon Seiko Kk | 密閉型アクチュエータ |
| JP2000322820A (ja) * | 1999-05-12 | 2000-11-24 | Nippon Densan Corp | ディスク駆動用モータ |
| JP2001339920A (ja) | 2000-05-30 | 2001-12-07 | Tamagawa Seiki Co Ltd | 真空モータ |
| JP2006311649A (ja) | 2005-04-26 | 2006-11-09 | Yokogawa Electric Corp | 真空モータ |
| JP2009516808A (ja) * | 2005-08-09 | 2009-04-23 | オメガ−ケミックス プライベート リミテッド | 磁気シール組立体 |
| JP4445075B2 (ja) | 1999-10-06 | 2010-04-07 | 東京エレクトロン株式会社 | 真空モータ及び搬送装置 |
| JP2013230031A (ja) * | 2012-04-26 | 2013-11-07 | Nsk Ltd | モータ |
| JP2014014209A (ja) * | 2012-07-03 | 2014-01-23 | Nsk Ltd | 電動機及び搬送装置 |
| WO2014188672A1 (ja) * | 2013-05-20 | 2014-11-27 | 日本精工株式会社 | モータ、位置決め装置、搬送装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3533350B2 (ja) * | 1999-09-30 | 2004-05-31 | 山洋電気株式会社 | 二軸モータ |
| US6930420B2 (en) * | 2001-03-21 | 2005-08-16 | Nsk Ltd. | Motor |
| CN203395021U (zh) * | 2013-05-30 | 2014-01-15 | 上海高越精密陶瓷有限公司 | 一种混合陶瓷球轴承 |
| CN108351015B (zh) * | 2015-09-23 | 2021-07-16 | 聂克森集团公司 | 运动控制装置 |
| JP6576773B2 (ja) * | 2015-09-30 | 2019-09-18 | 日本電産サンキョー株式会社 | ポンプ装置 |
| EP3499690A4 (en) * | 2016-08-08 | 2020-04-08 | NSK Ltd. | MOTOR, ACTUATOR, SEMICONDUCTOR MANUFACTURING DEVICE, AND FLAT DISPLAY MANUFACTURING DEVICE |
| JP2019041429A (ja) * | 2017-08-22 | 2019-03-14 | 多摩川精機株式会社 | 3相ブラシレスdcモータ及びその駆動方法 |
-
2021
- 2021-01-26 JP JP2021010146A patent/JP2021118677A/ja active Pending
- 2021-01-26 US US17/786,957 patent/US20230037848A1/en active Pending
- 2021-01-26 JP JP2021010143A patent/JP2021118674A/ja active Pending
- 2021-01-26 EP EP21746926.1A patent/EP4047791A4/en active Pending
- 2021-01-26 JP JP2021009950A patent/JP2021118673A/ja active Pending
- 2021-01-26 JP JP2021010145A patent/JP2021118676A/ja active Pending
- 2021-01-26 CN CN202180009697.7A patent/CN114982100A/zh active Pending
- 2021-01-26 WO PCT/JP2021/002569 patent/WO2021153540A1/ja unknown
- 2021-01-26 JP JP2021010144A patent/JP2021118675A/ja active Pending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000032701A (ja) * | 1998-07-09 | 2000-01-28 | Nippon Seiko Kk | 密閉型アクチュエータ |
| JP2000322820A (ja) * | 1999-05-12 | 2000-11-24 | Nippon Densan Corp | ディスク駆動用モータ |
| JP4445075B2 (ja) | 1999-10-06 | 2010-04-07 | 東京エレクトロン株式会社 | 真空モータ及び搬送装置 |
| JP2001339920A (ja) | 2000-05-30 | 2001-12-07 | Tamagawa Seiki Co Ltd | 真空モータ |
| JP2006311649A (ja) | 2005-04-26 | 2006-11-09 | Yokogawa Electric Corp | 真空モータ |
| JP2009516808A (ja) * | 2005-08-09 | 2009-04-23 | オメガ−ケミックス プライベート リミテッド | 磁気シール組立体 |
| JP2013230031A (ja) * | 2012-04-26 | 2013-11-07 | Nsk Ltd | モータ |
| JP2014014209A (ja) * | 2012-07-03 | 2014-01-23 | Nsk Ltd | 電動機及び搬送装置 |
| WO2014188672A1 (ja) * | 2013-05-20 | 2014-11-27 | 日本精工株式会社 | モータ、位置決め装置、搬送装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4047791A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230037848A1 (en) | 2023-02-09 |
| EP4047791A4 (en) | 2022-12-14 |
| EP4047791A1 (en) | 2022-08-24 |
| JP2021118673A (ja) | 2021-08-10 |
| JP2021118677A (ja) | 2021-08-10 |
| JP2021118674A (ja) | 2021-08-10 |
| CN114982100A (zh) | 2022-08-30 |
| JP2021118676A (ja) | 2021-08-10 |
| JP2021118675A (ja) | 2021-08-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3740770B2 (ja) | 密閉型アクチュエ−タ | |
| JP5962179B2 (ja) | モータ | |
| TW200843295A (en) | Brushless motor | |
| WO2021153540A1 (ja) | モータ | |
| JP4581757B2 (ja) | モータシステム | |
| JP2022150313A (ja) | モータ | |
| JP5288164B2 (ja) | スカラーロボット | |
| JP2006296059A (ja) | 回転支持装置 | |
| JP4196433B2 (ja) | 密閉型アクチュエータ | |
| JP6711435B2 (ja) | モータ、搬送装置及び半導体製造装置 | |
| JP4656381B2 (ja) | ダイレクトドライブモータ | |
| JP4656380B2 (ja) | モータシステム | |
| JP6507483B2 (ja) | モータ、搬送装置及び半導体製造装置 | |
| JP2022150108A (ja) | モータ | |
| JP6658838B2 (ja) | モータ、搬送装置及び半導体製造装置 | |
| JP5987348B2 (ja) | モータ | |
| JP6409306B2 (ja) | モータ、搬送装置及び半導体製造装置 | |
| JP2006296057A (ja) | モータ | |
| JP4613574B2 (ja) | モータシステム | |
| JP2009038911A (ja) | ブラシレスモータ | |
| JP2009303332A (ja) | ダイレクトドライブモータ | |
| JP2008167588A (ja) | ブラシレスモータ | |
| WO2008050420A1 (fr) | Moteur | |
| JP2006296060A (ja) | モータシステム | |
| WO2008050421A1 (fr) | Système de moteur |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21746926 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021746926 Country of ref document: EP Effective date: 20220517 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |