WO2021045112A1 - 傾斜車両 - Google Patents
傾斜車両 Download PDFInfo
- Publication number
- WO2021045112A1 WO2021045112A1 PCT/JP2020/033277 JP2020033277W WO2021045112A1 WO 2021045112 A1 WO2021045112 A1 WO 2021045112A1 JP 2020033277 W JP2020033277 W JP 2020033277W WO 2021045112 A1 WO2021045112 A1 WO 2021045112A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle
- tilting
- occupant
- vehicle body
- boarding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDECARS, FORECARS, OR THE LIKE
- B62K5/00—Cycles with handlebars, equipped with three or more main road wheels
- B62K5/10—Cycles with handlebars, equipped with three or more main road wheels with means for inwardly inclining the vehicle body on bends
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/016—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input
- B60G17/0162—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input mainly during a motion involving steering operation, e.g. cornering, overtaking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62H—CYCLE STANDS; SUPPORTS OR HOLDERS FOR PARKING OR STORING CYCLES; APPLIANCES PREVENTING OR INDICATING UNAUTHORIZED USE OR THEFT OF CYCLES; LOCKS INTEGRAL WITH CYCLES; DEVICES FOR LEARNING TO RIDE CYCLES
- B62H1/00—Supports or stands forming part of or attached to cycles
- B62H1/02—Articulated stands, e.g. in the shape of hinged arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J17/00—Weather guards for riders; Fairings or stream-lining parts not otherwise provided for
- B62J17/08—Hoods protecting the rider
- B62J17/086—Frame mounted hoods specially adapted for motorcycles or the like
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J45/00—Electrical equipment arrangements specially adapted for use as accessories on cycles, not otherwise provided for
- B62J45/40—Sensor arrangements; Mounting thereof
- B62J45/41—Sensor arrangements; Mounting thereof characterised by the type of sensor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDECARS, FORECARS, OR THE LIKE
- B62K5/00—Cycles with handlebars, equipped with three or more main road wheels
- B62K5/02—Tricycles
- B62K5/027—Motorcycles with three wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDECARS, FORECARS, OR THE LIKE
- B62K5/00—Cycles with handlebars, equipped with three or more main road wheels
- B62K5/08—Cycles with handlebars, equipped with three or more main road wheels with steering devices acting on two or more wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2300/00—Indexing codes relating to the type of vehicle
- B60G2300/12—Cycles; Motorcycles
- B60G2300/122—Trikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2300/00—Indexing codes relating to the type of vehicle
- B60G2300/45—Rolling frame vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R16/00—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for
- B60R16/02—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements
- B60R16/037—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements for occupant comfort, e.g. for automatic adjustment of appliances according to personal settings, e.g. seats, mirrors, steering wheel
- B60R16/0373—Voice control
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Definitions
- the present invention relates to a tilting vehicle, and more particularly to a tilting vehicle provided with a tilting actuator that tilts the vehicle body.
- tilting vehicle equipped with a tilting actuator that tilts the vehicle body
- tilting vehicles are disclosed, for example, in WO 2017/86352.
- a tilting vehicle equipped with a tilting actuator that tilts the vehicle body a tilting vehicle having a vehicle body having a roof is known. Such a tilting vehicle is disclosed in, for example, Design Registration No. 1595205.
- An object of the present invention is to provide a tilting vehicle provided with a tilting actuator for tilting the vehicle body, which can increase the degree of freedom in designing the vehicle body.
- Some tilting vehicles equipped with a tilting actuator that tilts the vehicle body have a vehicle body that does not have a roof as described in Patent Document 1, and some have a roof as described in Patent Document 2.
- the inventors of the present application examined a tilting vehicle equipped with a tilting actuator that tilts the vehicle body from the viewpoint of increasing the degree of freedom in designing the vehicle body.
- the tilting actuator that tilts the vehicle body should be used not only when the tilting vehicle is running but also when the occupant gets on or off.
- the tilting actuator for tilting the vehicle body when the tilting vehicle is running it is not necessary to separately provide an actuator for when the occupant gets on or off, thereby providing a space for arranging the actuator.
- the degree of freedom in designing the vehicle body can be increased.
- the present invention has been completed based on such new findings.
- the tilting vehicle has a vehicle body, one or two front wheels supported by the vehicle body, two when supported by the vehicle body and one front wheel, and two when there are two front wheels.
- the vehicle body, front wheels and rear wheels When turning to the left with one or two rear wheels, the vehicle body, front wheels and rear wheels are tilted to the left, and when turning to the right, the vehicle body, front wheels and rear wheels are tilted to the right.
- a moving vehicle body based on a tilting device, a tilting actuator connected to the tilting device to apply force to the tilting motion of the vehicle body, front wheels and rear wheels, and an operation by an occupant to turn left or right. It is a tilting vehicle equipped with a control device that controls a tilting actuator so as to control a tilting angle.
- the tilting vehicle further includes a detection device that detects an input of an intention to get on and off, which indicates an intention of the occupant to get on or off.
- the control device controls the tilt actuator so as to control the tilt angle of the vehicle body while the vehicle is stopped, based on the detection of the boarding / alighting intention input indicating the intention of the occupant to board or disembark by the detection device.
- the tilting actuator can control the tilting angle of the vehicle body while the vehicle is running and when the vehicle is stopped. Therefore, it is not necessary to separately adopt an actuator other than the tilt actuator as an actuator for controlling the tilt angle of the vehicle body while the vehicle is stopped, and it is not necessary to secure a space for arranging the actuator. As a result, the degree of freedom in designing the vehicle body can be improved.
- the tilting vehicle according to the embodiment of the present invention may include, for example, a roof in which at least a part thereof is arranged on the occupant of the tilting vehicle. Further, the inclined vehicle provided with such a roof may be provided with a door that opens and closes when the occupant of the inclined vehicle gets on and off.
- the vehicle body includes a vehicle body frame.
- the body frame may be a frame in which a plurality of parts are combined, or a frame in which a plurality of parts are integrally molded.
- the material of the vehicle body frame may be a metal such as aluminum or iron, a synthetic resin such as CFRP, or a combination thereof.
- the body frame may have a monocoque structure composed of exterior parts of the tilting vehicle, or may have a semi-monocoque structure in which a part thereof also serves as exterior parts of the tilting vehicle.
- one or two front wheels are supported by the vehicle body in a state where they can swing around an axis extending in the vertical direction of the vehicle body, for example.
- the axis extending in the vertical direction of the vehicle body does not have to extend in the vertical direction while the vehicle body is upright.
- the axis extending in the vertical direction of the vehicle body may be inclined in the rear direction of the vehicle body with respect to the vertical direction, for example, in a state where the vehicle body is upright.
- the upper end of the axis extending in the vertical direction of the vehicle body may be located after the lower end of the axis extending in the vertical direction of the vehicle body in the state where the vehicle body is upright.
- the front wheels may be, for example, directly supported by the vehicle body or indirectly supported by the vehicle body.
- the mode in which the front wheels are indirectly supported by the vehicle body includes, for example, a mode in which a suspension device arranged between the front wheels and the vehicle body is used to support the front wheels on the vehicle body.
- the suspension device that supports one front wheel on the vehicle body is, for example, a telescopic type or a bottom link type front fork.
- the suspension device that supports the two front wheels on the vehicle body is, for example, an independent suspension system suspension.
- the two front wheels are arranged side by side in the left-right direction of the inclined vehicle, for example.
- the rear wheels may be, for example, directly supported by the vehicle body or indirectly supported by the vehicle body.
- the mode in which the rear wheels are indirectly supported by the vehicle body includes, for example, a mode in which a suspension device arranged between the rear wheels and the vehicle body is used to support the rear wheels on the vehicle body.
- the suspension device that supports one rear wheel on the vehicle body is, for example, a swing arm type suspension.
- the suspension device that supports the two rear wheels on the vehicle body is, for example, an independent suspension system suspension.
- the two rear wheels are arranged side by side in the left-right direction of the inclined vehicle, for example.
- the tilting device includes, for example, a link mechanism that can be deformed by transmitting a force from a tilting actuator.
- a link mechanism includes, for example, a parallelogram link type lean mechanism as a lean mechanism for inclining two front wheels.
- the tilting device tilts any of the vehicle body, front wheels and rear wheels to the left or right, and the rest is left. Includes aspects of tilting in a direction or to the right.
- the tilt actuator has, for example, an output member mechanically connected to the tilt device.
- the mode in which the output member is mechanically connected to the tilting device includes, for example, a mode in which power can be transmitted from the output member to the tilting device.
- the tilt actuator is, for example, an electric motor having an output member that can rotate in the forward direction and the reverse direction.
- the tilt actuator may be directly connected to the tilt device or indirectly connected to the tilt device.
- the mode in which the tilting actuator applies a force to the tilting motion of the vehicle body, the front wheels, and the rear wheels includes, for example, a mode in which the link mechanism of the tilting device is deformed by the force from the tilting actuator.
- the tilting actuator applies a force to the tilting motion of the vehicle body, front wheels and rear wheels
- the tilting actuator applies a force to tilt any of the vehicle body, front wheels and rear wheels, and the rest is tilted accordingly.
- the control device is, for example, an ECU (Electronic Control Unit).
- the ECU is realized by, for example, a combination of an IC (Integrated Circuit), an electronic component, a circuit board, and the like.
- Control by the control device is realized, for example, by the CPU (Central Processing Unit) reading a program stored in the non-volatile memory and executing a predetermined process according to the program.
- CPU Central Processing Unit
- the operation by the occupant for turning to the left or right is performed, for example, by using the operating means provided on the vehicle body in a state where the occupant can operate the vehicle.
- the operating means is, for example, a handle that can be swung by an occupant.
- the mode of controlling the tilting actuator so as to control the tilting angle of the vehicle body during traveling is, for example, when an operation by an occupant for turning to the left is performed during traveling.
- the inclination angle of the vehicle body during traveling changes depending on, for example, an operation by an occupant for turning to the left or right. For example, the larger the amount of operation, the larger the inclination angle.
- the inclination angle of the vehicle body is, for example, based on a state in which the vehicle body is upright with respect to the road surface, and is inclined to the left or right from the state in which the vehicle body is upright with respect to the road surface. It is the angle when it hits.
- the straight line extending in the vertical direction of the vehicle body when the vehicle body is upright with respect to the road surface is used as a reference line
- the inclination angle of the vehicle body is left or right from the state where the vehicle body is upright with respect to the road surface. This is the angle formed by the straight line extending in the vertical direction of the vehicle body and the reference line when tilted toward.
- the control device controls the tilt actuator so as to control the tilt angle of the vehicle body while the vehicle is stopped.
- the control device controls the tilt actuator so as to change the tilt angle of the vehicle body when the vehicle is stopped.
- the inclination angle of the vehicle body when the vehicle is stopped may be controlled before the occupant gets on the vehicle, after the occupant gets on the vehicle, or before the occupant gets off (that is, while the occupant is on the vehicle). It may be controlled after the occupant has disembarked.
- the detection of boarding / alighting intention input by the detection device is not particularly limited.
- Detection of boarding / alighting intention input by the detection device includes, for example, biometric authentication.
- the biometric authentication is not particularly limited as long as it is performed using information on the physical characteristics and behavioral characteristics of the occupants of the tilting vehicle.
- the biometric authentication may be performed in a state where the occupant of the inclined vehicle is in contact with the inclined vehicle, or may be performed in a state where the occupant of the inclined vehicle is away from the inclined vehicle.
- Biometric authentication includes, for example, face authentication, voice authentication (voiceprint authentication), fingerprint authentication, vein authentication, iris authentication, retinal authentication, gesture authentication and the like.
- the detection of the boarding / alighting intention input by the detection device may be performed before the occupant gets on the inclined vehicle, or may be performed while the occupant is on the inclined vehicle. Good. If the detection device detects the boarding / alighting intention input before the occupant gets on the tilting vehicle, the detection device may detect the boarding / alighting intention input while the occupant is in contact with the tilting vehicle. The occupant may be away from the tilting vehicle.
- the detection of the boarding / alighting intention input by the detection device may be performed in a state where the occupant is away from the inclined vehicle, or is performed in a state where the occupant is in contact with the inclined vehicle. May be good.
- the boarding / alighting intention input detected by the detection device when the occupant is away from the inclined vehicle indicates, for example, the occupant's boarding intention.
- the boarding / alighting intention input detected by the detection device while the occupant is in contact with the inclined vehicle may indicate the occupant's intention to board the vehicle or may indicate the occupant's intention to disembark.
- the occupant is in contact with the inclined vehicle, the occupant is in the inclined vehicle, or the occupant is not in the inclined vehicle but is in contact with the members (or parts) constituting the inclined vehicle. Including the state of being.
- the mode in which the detection device detects the boarding / alighting intention input is not particularly limited.
- the mode in which the detection device detects the boarding / alighting intention input indicating the occupant's intention to board may be the same as the mode in which the detection device detects the boarding / alighting intention input indicating the occupant's intention to board, or the detection device may detect the occupant's boarding / alighting intention input. It may be different from the mode of detecting the boarding / alighting intention input indicating the disembarking intention.
- the detection device determines the occupant's intention to board.
- the first detection device for detecting the boarding / alighting intention input to be indicated and the second detecting device for detecting the boarding / alighting intention input indicating the occupant's disembarkation intention may be included.
- the boarding / alighting intention input may be realized by using a device that can be carried by the occupants of the tilting vehicle, or may be realized by using a device arranged in the tilting vehicle.
- the mode in which the occupant carries the device includes not only a mode in which the occupant carries the device while holding it by hand, but also a mode in which the occupant carries the device while wearing it on the body.
- the device that can be carried by the occupant may be, for example, a smart key, a smartphone, a smart watch, or a smart glass. When using the smart key, the occupant may operate the smart key, or the occupant may approach the inclined vehicle while holding the smart key.
- the occupant When the occupant operates the smart key, the occupant operates, for example, the button of the smart key.
- the buttons on the smart key may be physical or electrically generated.
- a smartphone for example, a dedicated application is used.
- a smart watch or smart glasses for example, an occupant may approach an inclined vehicle while wearing the smart watch or smart glasses.
- the detection device determines the distance between the smartkey (or smartwatch or smartglass) and the detection device. You may measure.
- the detection device inputs the boarding / alighting intention input when the smart key (or smart watch or smart glass) exists within the first distance preset as the distance indicating that the occupant has the intention to board. It may be detected.
- the device arranged on the tilting vehicle may be, for example, one used only for inputting the intention to get on and off, or one using a device used to realize the function of the tilting vehicle. Good.
- the intention of the occupant to get on the vehicle may be the intention of the occupant to get on the inclined vehicle.
- the occupant's intention to board may be the intention to carry out a series of boarding processes from the occupant's boarding to the start of the inclined vehicle.
- the occupant's intention to board may include the occupant's intention to ride on the inclined vehicle.
- the occupant's intention to board may include the intention to start the inclined vehicle in addition to the intention to perform the occupant's riding operation of getting on the inclined vehicle.
- the intention of the occupant to disembark may be the intention of the occupant to disembark from the inclined vehicle.
- the intention of the occupant to disembark may be the intention to perform a series of disembarkation processes from the disembarkation of the occupant to the parking of the inclined vehicle.
- the occupant's intention to disembark may include the occupant's intention to disembark from the inclined vehicle.
- the intention of the occupant to disembark may include an intention to park the inclined vehicle in addition to the intention of the occupant to disembark from the inclined vehicle.
- the detection device and the control device may be connected by wire or wirelessly.
- the detection device detects the boarding / alighting intention input from the occupant at a position away from the tilting vehicle.
- the boarding / alighting intention input detected by the detection device includes at least one of an image, a sound, a radio wave, and a sound wave.
- the detection device includes an image pickup device. If the boarding / alighting intention input is voice, the detection device includes a microphone. If the boarding / alighting intention input is radio waves or sound waves, the detector includes a receiver.
- the tilting vehicle according to the embodiment of the present invention preferably further includes a boarding / alighting intention input device.
- the boarding / alighting intention input device is arranged at a position where the occupant can operate it.
- the boarding / alighting intention input device receives an boarding / alighting intention input indicating the occupant's intention to board or disembark.
- the detection device detects the boarding / alighting intention input input to the boarding / alighting intention input device by the occupant.
- the boarding / alighting intention input device may be used only for receiving the boarding / alighting intention input, or uses a device used for realizing the function of the inclined vehicle. It may be a thing.
- the device used to realize the function of the tilting vehicle may be, for example, a main switch (more specifically, a part operated by an occupant) for starting the tilting vehicle, or a tilting vehicle. It may be a stand used when parking, or it may be a seat on which an occupant sits when riding.
- the detection device may include a switch for detecting the state of the stand.
- the detection device may detect the boarding / alighting intention input by detecting the deformation or displacement of the boarding / alighting intention input device.
- the boarding / alighting intention input device may include a detection device.
- the control device controls the tilting actuator so as to control the tilting angle of the vehicle body while the vehicle is stopped in the mode shown in (1) or (2) below. May be good.
- the tilting actuator controls the tilting angle of the vehicle body, and then the occupant gets on or off.
- the tilting actuator controls the tilting angle of the vehicle body.
- the aspect shown in (1) above includes a mode in which the detection device detects the boarding / alighting intention input, the tilting actuator controls the tilting angle of the vehicle body, and then the occupant gets on the vehicle.
- the aspect shown in (1) above includes a mode in which the detection device detects the boarding / alighting intention input, the tilting actuator controls the tilting angle of the vehicle body, and then the occupant disembarks.
- the aspect shown in (2) above includes a mode in which the detection device detects the boarding / alighting intention input, the occupant gets on the vehicle, and then the tilting actuator controls the tilting angle of the vehicle body.
- the aspect shown in (2) above includes a mode in which the detection device detects the boarding / alighting intention input, the occupant disembarks, and then the tilting actuator controls the tilting angle of the vehicle body. Further, in the embodiment shown in (2) above, when the detection device detects the boarding / alighting intention input input by the occupant to the boarding / alighting intention input device, the detection of the boarding / alighting intention input by the detection device is the occupant's boarding or It may be realized by getting off. In other words, the detection device may detect the boarding / alighting intention input by getting on or off the occupant.
- the aspect shown in the above (2) includes an aspect in which the tilting actuator controls the tilting angle of the vehicle body after the detection of the boarding / alighting intention input by the detection device is realized by the occupant's boarding.
- the aspect shown in (2) above includes a mode in which the tilting actuator controls the tilting angle of the vehicle body after the detection of the boarding / alighting intention input by the detection device is realized by the getting off of the occupant.
- the aspect in which the inclination actuator controls the inclination angle of the vehicle body includes an aspect in which the inclination actuator changes the inclination angle of the vehicle body.
- the aspect in which the inclination actuator controls the inclination angle of the vehicle body includes an aspect in which the inclination actuator maintains the inclination angle of the vehicle body.
- the aspect in which the inclination actuator controls the inclination angle of the vehicle body includes an aspect in which the inclination actuator changes the inclination angle of the vehicle body.
- the aspect in which the inclination actuator controls the inclination angle of the vehicle body includes an aspect in which the inclination actuator maintains the inclination angle of the vehicle body.
- the tilt actuator controls the tilt angle of the vehicle body after the detection device detects the boarding / alighting intention input, and then the occupant gets on the vehicle, the occupant's intention to board the occupant is that the occupant gets on the inclined vehicle. It suffices if it is the intention to perform the boarding operation.
- the tilt actuator controls the tilt angle of the vehicle body after the detection device detects the boarding / alighting intention input, and then the occupant gets on the vehicle the occupant's intention to board the occupant is that the occupant gets on the inclined vehicle. It suffices to include the intention to perform the riding operation.
- the tilt actuator controls the tilt angle of the vehicle body after the detection device detects the boarding / alighting intention input, and then the occupant disembarks
- the occupant's intention to disembark is that the occupant disembarks from the tilted vehicle. It suffices if it is the intention to get off the vehicle.
- the tilt actuator controls the tilt angle of the vehicle body after the detection device detects the boarding / alighting intention input, and then the occupant disembarks
- the occupant's intention to disembark is that the occupant disembarks from the tilted vehicle. It suffices to include the intention to disembark.
- the detection device detects the boarding / alighting intention input
- the occupant gets on the vehicle, and then the tilting actuator controls the tilting angle of the vehicle body
- the occupant's intention to board the vehicle is from the occupant's boarding to the start of the tilted vehicle. It suffices if it is the intention to carry out a series of boarding processes.
- the detection device detects the boarding / alighting intention input
- the occupant disembarks controls the tilt angle of the vehicle body
- the occupant's intention to disembark is from the occupant's disembarkation to the parking of the tilted vehicle.
- the tilting actuator controls the tilt angle of the vehicle body after the detection of the boarding / alighting intention input by the detection device is realized by the occupant's boarding
- the occupant's boarding intention is a series from the occupant's boarding to the start of the tilted vehicle. It suffices if it is the intention to carry out the boarding process.
- the tilting actuator controls the tilt angle of the vehicle body after the detection of the boarding / alighting intention input by the detection device is realized by the occupant's disembarkation
- the occupant's intention to disembark is a series from the occupant's disembarkation to the parking of the tilted vehicle. It suffices if it is the intention to carry out the disembarkation process.
- a tilting vehicle provided with a tilting actuator for tilting the vehicle body, which can increase the degree of freedom in designing the vehicle body.
- the various directions of the tilting vehicle 10 are the directions seen from the occupant seated on the seat of the tilting vehicle 10.
- the vehicle body 20 can be inclined to the left L or the right R.
- the vertical direction and the horizontal direction of the vehicle body do not match the vertical direction UD and the horizontal direction LR of the vehicle.
- the vertical direction and the horizontal direction of the vehicle body 20 coincide with the vertical direction UD and the horizontal direction LR of the vehicle.
- the tilting vehicle 10 includes a vehicle body 20, two front wheels 30F, one rear wheel 30B, a tilting device 40, a tilting actuator 50, a detection device 60, and a control device 70. These will be described below.
- the vehicle body 20 includes, for example, a vehicle body frame.
- Each of the two front wheels 30F is supported by the vehicle body 20.
- the two front wheels 30F are arranged side by side in the vehicle left-right direction LR.
- the two front wheels 30F are supported by the vehicle body 20 in a state where they can swing around an axis extending in the vertical direction of the vehicle body.
- the rear wheel 30B is supported by the vehicle body 20.
- the tilting device 40 When the tilting device 40 turns to the left L, the vehicle body 20, the front wheels 30F, and the rear wheels 30B are tilted to the left L.
- the tilting device 40 turns to the right R, the vehicle body 20, the front wheels 30F, and the rear wheels 30B are tilted to the right R.
- the tilt actuator 50 is connected to the tilt device 40.
- the tilting actuator 50 is, for example, an electric motor that is mechanically connected to the tilting device 40 and has an output member that can rotate in the forward and reverse directions.
- the tilting actuator 50 applies a force to the tilting motion of the vehicle body 20, the two front wheels 30F and the rear wheels 30B.
- the detection device 60 detects the boarding / alighting intention input.
- the boarding / alighting intention input indicates the intention of the occupant of the inclined vehicle 10 to get on or off.
- the detection device 60 when the detection device 60 detects the boarding / alighting intention input indicating the occupant's boarding intention, the detection device 60 is performed in a state where the occupant is away from the inclined vehicle 10. In the example shown in FIG. 1, when the detection device 60 detects the boarding / alighting intention input indicating the occupant's intention to get off, the detection device 60 is performed in a state where the occupant is in contact with the inclined vehicle 10.
- the control device 70 controls the tilt actuator 50 so as to control the tilt angle of the vehicle body 20 while the vehicle is stopped, based on the detection of the boarding / alighting intention input indicating the occupant's intention to board or disembark by the detection device 60.
- the tilting vehicle 10 further includes a device for maintaining the state of the vehicle body 20 when the vehicle is stopped. Specifically, the tilting vehicle 10 further includes a device for maintaining the stopped vehicle body 20 in a state of being tilted in the left direction L or the right direction R. In the example shown in FIG. 1, the tilting vehicle 10 further includes a side stand 80.
- the side stand 80 maintains the stopped vehicle body 20 in a state of being inclined to the left L or the right R by changing the state from the stored state to the used state.
- the side stand 80 is arranged to the left of the center of the LR in the left-right direction of the inclined vehicle 10. Therefore, the side stand 80 maintains a state in which the stopped vehicle body 20 is tilted to the left L.
- the device for maintaining the state of the vehicle body 20 while the vehicle is stopped may be a device for maintaining the vehicle body 20 while the vehicle is stopped in an upright state.
- the side stand 80 When the control device 70 controls the tilt actuator 50 so as to increase the tilt angle of the vehicle body 20, the side stand 80 is located with reference to the center of the left-right direction LR of the tilt vehicle 10 of the left direction L and the right direction R. The vehicle body 20 is tilted in the direction. In the example shown in FIG. 1, the side stand 80 is arranged to the left of the center of the LR in the left-right direction of the inclined vehicle 10. Therefore, when the control device 70 controls the tilt actuator 50 so as to increase the tilt angle of the vehicle body 20, the control device 70 tilts the vehicle body 20 to the left L.
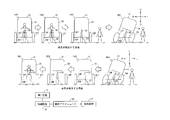
- the control device 70 determines in step S11 whether or not the tilting vehicle 10 is stopped. Whether or not the tilting vehicle 10 is stopped may be determined by, for example, whether or not the tilting vehicle 10 is started, or a signal from a vehicle speed sensor that detects the vehicle speed of the tilting vehicle 10 is used. May be determined. When determining whether or not the inclined vehicle 10 has started, it is determined that the inclined vehicle 10 is stopped when the inclined vehicle 10 has not started. When the tilting vehicle 10 is not stopped (step S11: NO), the control device 70 ends the boarding / alighting control.
- step S12 the control device 70 determines in step S12 whether or not the detection device 60 has detected the boarding / alighting intention input.
- the detection device 60 detects the boarding / alighting intention input indicating the occupant's boarding intention, for example, the occupant operates the smart key at a position away from the inclined vehicle 10 and outputs a signal from the smart key.
- the control device 70 determines whether or not the detection device 60 has detected the detection.
- the detection device 60 detects the boarding / alighting intention input indicating the occupant's intention to get off, for example, the smart key is operated while the occupant is in the inclined vehicle 10, and the detection device 60 detects the signal from the smart key.
- the control device 70 determines whether or not the operation has been performed. When the occupant gets off, the control device 70 may determine whether or not the detection device 60 has detected the operation of the occupant with respect to the device arranged on the inclined vehicle 10.
- the control device 70 ends the boarding / alighting control.
- step S12 When the detection device 60 detects the boarding / alighting intention input (step S12: YES), the control device 70 puts the vehicle body 20 in a state where it is easy to get on or off in step S13.
- the vehicle body 20 tilted at the time of stopping is raised before the occupant boarding.
- the detection device 60 detects the boarding / alighting intention input indicating the occupant's intention to get off the side stand 80 is changed from the retracted state to the state of being used, and the vehicle body 20 is tilted while the occupant is on board. That is, the vehicle body 20 is tilted before the occupant gets off.
- the control device 70 ends the boarding / alighting control.
- the detection device 60 detects the boarding / alighting intention input indicating the occupant's boarding intention, for example, after confirming that the occupant is seated while the vehicle body 20 is tilted, the vehicle body 20 is raised. May be good.
- the seating of the occupant is determined based on, for example, a signal of a sensor that detects whether or not the occupant is seated on the seat of the inclined vehicle 10.
- the detection device 60 detects the boarding / alighting intention input indicating the occupant's intention to get off, for example, after confirming that the occupant has disembarked in the state where the vehicle body 20 is upright (upright state), the vehicle body 20 is tilted. You may do so.
- the disembarkation of the occupant is determined based on, for example, a signal of a sensor that detects whether or not the vehicle is seated on the seat of the inclined vehicle 10.
- the tilting actuator 50 can control the tilting angle of the vehicle body 20 while the vehicle is running and when the vehicle is stopped. Therefore, it is not necessary to separately adopt an actuator other than the tilt actuator 50 as an actuator for controlling the tilt angle of the vehicle body 20 while the vehicle is stopped, and it is not necessary to secure a space for arranging the actuator. As a result, the degree of freedom in designing the vehicle body 20 can be improved.
- the tilting actuator 50 controls the tilting angle of the vehicle body 20 while the vehicle is stopped. Therefore, the tilting actuator 50 provided in the tilting vehicle 10 can be used to improve the occupant's ability to get on or off.
- the tilting actuator 50 used for tilting the vehicle body 20 during traveling is used for the tilting angle control of the vehicle body 20 while the vehicle is stopped, the intention to get on and off without providing a separate tilting actuator. It is possible to improve the ease of getting on and off the inclined vehicle 10 according to the above and to improve the degree of freedom in designing the vehicle body 20 in the inclined vehicle 10.
- the tilting vehicle 101 is different from the tilting vehicle 10 in that it further includes an boarding / alighting intention input device 90.
- the boarding / alighting intention input device 90 is arranged at a position where the occupant can operate it.
- the boarding / alighting intention input device 90 receives an boarding / alighting intention input indicating the occupant's intention to board or disembark.
- the detection device 60 detects the boarding / alighting intention input input to the boarding / alighting intention input device 90 by the occupant.
- FIG. 3 a case is shown in which the occupant inputs the boarding / alighting intention input indicating the boarding intention to the boarding / alighting intention input device 90 before boarding, and the occupant gets on after the vehicle body 20 gets up.
- the occupant inputs the boarding / alighting intention input indicating the boarding intention to the boarding / alighting intention input device 90 before boarding, for example, after confirming that the occupant is seated while the vehicle body 20 is tilted, the vehicle body 20 is raised. You may let it. Further, in the example shown in FIG.
- a case is shown in which the occupant inputs the boarding / alighting intention input indicating the disembarkation intention to the boarding / alighting intention input device 90 before getting off, and the occupant disembarks after the vehicle body 20 is tilted.
- the occupant inputs the boarding / alighting intention input indicating the disembarkation intention to the boarding / alighting intention input device 90 before getting off, for example, after confirming that the occupant has disembarked in the state where the vehicle body 20 is upright (upright state).
- the vehicle body 20 may be tilted.
- the tilting vehicle 10A differs from the tilting vehicle 10 in that it includes a roof 22.
- the roof 22 is arranged on the occupant who is at least partially aboard the inclined vehicle 10A.
- the control device 70 controls the tilting actuator 50 so as to raise the tilted vehicle body 20 while the vehicle is stopped in order to facilitate the riding of the occupants. Further, in the inclined vehicle 10A, in order to facilitate the disembarkation of the occupant, the control device 70 is such that the vehicle body 20 is tilted and maintained in that state after the occupant disembarks in the state where the vehicle body 20 is raised. Controls the tilt actuator 50.
- the tilting vehicle 10A1 according to a modified example of the second embodiment of the present invention will be described with reference to FIG.
- the tilting vehicle 10A1 includes a door 24 as compared with the tilting vehicle 10A.
- the door 24 is opened and closed when the occupant of the tilting vehicle 10A1 gets on or off.
- the vehicle body 20 is tilted. In this case, the vehicle body 20 is tilted when getting on or off.
- the door 24 opens when the door 24 is opened. It may interfere with the inclined surface.
- the inclination of the vehicle body 20 may be controlled so as to suppress the interference between the door 24 and the inclined surface.
- the mode in which the tilt actuator controls the tilt angle of the vehicle body while the vehicle is stopped includes a mode in which the tilt angle of the vehicle body does not change before and after the detection of the boarding / alighting intention input by the detection device.
- the vehicle body is maintained at a predetermined inclination angle by the stand or the like, and the stand does not function after the detection of the boarding intention input.
- the tilt actuator may maintain the tilt angle of the vehicle body in the same state.
- Tilt vehicle 20 Body 22 Roof 24 Door 30F Front wheel 30B Rear wheel 40 Tilt device 50 Tilt actuator 60 Detection device 70 Control device 90 Boarding / alighting intention input device
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automatic Cycles, And Cycles In General (AREA)
- Vehicle Body Suspensions (AREA)
- Motorcycle And Bicycle Frame (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP20859752.6A EP4005902A4 (en) | 2019-09-02 | 2020-09-02 | TILT VEHICLE |
| EP22213827.3A EP4209408A1 (en) | 2019-09-02 | 2020-09-02 | Leaning vehicle |
| EP22213819.0A EP4209407B1 (en) | 2019-09-02 | 2020-09-02 | Leaning vehicle |
| JP2021544005A JP7269355B2 (ja) | 2019-09-02 | 2020-09-02 | 傾斜車両 |
| US17/684,148 US11794846B2 (en) | 2019-09-02 | 2022-03-01 | Leaning vehicle |
| JP2022201754A JP7269428B2 (ja) | 2019-09-02 | 2022-12-19 | 傾斜車両 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019-159342 | 2019-09-02 | ||
| JP2019159342 | 2019-09-02 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/684,148 Continuation-In-Part US11794846B2 (en) | 2019-09-02 | 2022-03-01 | Leaning vehicle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021045112A1 true WO2021045112A1 (ja) | 2021-03-11 |
Family
ID=74852361
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/033277 Ceased WO2021045112A1 (ja) | 2019-09-02 | 2020-09-02 | 傾斜車両 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11794846B2 (https=) |
| EP (3) | EP4209407B1 (https=) |
| JP (2) | JP7269355B2 (https=) |
| WO (1) | WO2021045112A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4159607B1 (en) * | 2021-09-30 | 2025-07-23 | Yamaha Hatsudoki Kabushiki Kaisha | Lean control device and leaning vehicle |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20260103257A1 (en) * | 2022-09-29 | 2026-04-16 | Robert Bosch Gmbh | Controller and control method |
| JP2024154021A (ja) * | 2023-04-18 | 2024-10-30 | ヤマハ発動機株式会社 | リーン車両 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0592788A (ja) * | 1991-10-03 | 1993-04-16 | Honda Motor Co Ltd | 音声認識機能付自動二輪車 |
| JP2013144513A (ja) * | 2012-01-16 | 2013-07-25 | Equos Research Co Ltd | 車両 |
| WO2017082426A1 (ja) * | 2015-11-13 | 2017-05-18 | ヤマハ発動機株式会社 | 傾斜車両 |
| WO2017086352A1 (ja) | 2015-11-20 | 2017-05-26 | ヤマハ発動機株式会社 | リーン車両 |
| JP2019031149A (ja) * | 2017-08-07 | 2019-02-28 | トヨタ自動車株式会社 | 車体傾斜装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3711554A1 (de) * | 1987-04-06 | 1988-10-27 | Isdera Ing Buero Eberhard Schu | Kurvenneigbares zweispurfahrzeug |
| US6224069B1 (en) * | 1999-02-08 | 2001-05-01 | General Motors Corporation | Body leveling system for motor vehicle |
| SE522579C2 (sv) * | 2000-04-04 | 2004-02-17 | Yamaha Motor Co Ltd | Förfarande att medelst stödorgansarrangemang påverka ett fordons lutning samt fordon med sådant stödorgansarrangemang |
| JP4305289B2 (ja) * | 2004-06-10 | 2009-07-29 | 株式会社デンソー | 車両用制御装置およびその装置を備える車両用制御システム |
| JP5381857B2 (ja) * | 2010-03-26 | 2014-01-08 | 株式会社エクォス・リサーチ | 車両 |
| JP5617509B2 (ja) * | 2010-10-07 | 2014-11-05 | トヨタ自動車株式会社 | 車体傾斜装置 |
| JP6097694B2 (ja) * | 2011-10-06 | 2017-03-15 | ヤマハ発動機株式会社 | 電動車両 |
| JP6728019B2 (ja) * | 2015-11-13 | 2020-07-22 | ヤマハ発動機株式会社 | 車両 |
| JP1595205S (https=) | 2017-09-29 | 2018-01-22 | ||
| JP2019064535A (ja) * | 2017-10-04 | 2019-04-25 | 株式会社デンソーテン | 車両制御装置および車両制御方法 |
| GB2568262B (en) * | 2017-11-08 | 2019-11-13 | Ford Global Tech Llc | Tilting Vehicle and Method of Control Thereof |
-
2020
- 2020-09-02 EP EP22213819.0A patent/EP4209407B1/en active Active
- 2020-09-02 WO PCT/JP2020/033277 patent/WO2021045112A1/ja not_active Ceased
- 2020-09-02 EP EP22213827.3A patent/EP4209408A1/en not_active Withdrawn
- 2020-09-02 EP EP20859752.6A patent/EP4005902A4/en not_active Withdrawn
- 2020-09-02 JP JP2021544005A patent/JP7269355B2/ja active Active
-
2022
- 2022-03-01 US US17/684,148 patent/US11794846B2/en active Active
- 2022-12-19 JP JP2022201754A patent/JP7269428B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0592788A (ja) * | 1991-10-03 | 1993-04-16 | Honda Motor Co Ltd | 音声認識機能付自動二輪車 |
| JP2013144513A (ja) * | 2012-01-16 | 2013-07-25 | Equos Research Co Ltd | 車両 |
| WO2017082426A1 (ja) * | 2015-11-13 | 2017-05-18 | ヤマハ発動機株式会社 | 傾斜車両 |
| WO2017086352A1 (ja) | 2015-11-20 | 2017-05-26 | ヤマハ発動機株式会社 | リーン車両 |
| JP2019031149A (ja) * | 2017-08-07 | 2019-02-28 | トヨタ自動車株式会社 | 車体傾斜装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4159607B1 (en) * | 2021-09-30 | 2025-07-23 | Yamaha Hatsudoki Kabushiki Kaisha | Lean control device and leaning vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4209407A1 (en) | 2023-07-12 |
| EP4209408A1 (en) | 2023-07-12 |
| EP4209407B1 (en) | 2024-11-06 |
| US20220185415A1 (en) | 2022-06-16 |
| US11794846B2 (en) | 2023-10-24 |
| JP2023021415A (ja) | 2023-02-10 |
| EP4005902A1 (en) | 2022-06-01 |
| JPWO2021045112A1 (https=) | 2021-03-11 |
| JP7269355B2 (ja) | 2023-05-08 |
| JP7269428B2 (ja) | 2023-05-08 |
| EP4005902A4 (en) | 2022-09-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7269428B2 (ja) | 傾斜車両 | |
| US11110821B2 (en) | Sliding center module system for vehicle | |
| JP5548058B2 (ja) | 車両用シートの制御装置 | |
| CN105966270B (zh) | 一种轻量化电动汽车轴荷分配系统及其调整方法 | |
| WO2008001863A1 (fr) | Véhicule | |
| JP5906865B2 (ja) | 車両用シート装置 | |
| JP2012111277A (ja) | 車両用シート制御装置 | |
| JP2018079818A (ja) | 車両用シートの調整方法及び車両用シートの調整装置 | |
| CN106891782A (zh) | 座椅状态识别、座椅控制的方法及装置 | |
| JP2024038470A (ja) | 操舵される前輪を備える傾斜車両 | |
| WO2018012555A1 (ja) | 車両用シート制御装置及び方法 | |
| JP2026010139A (ja) | 車両用シート装置 | |
| CN118790120A (zh) | 汽车座椅控制方法、车载控制器、汽车座椅及汽车 | |
| JP2019031149A (ja) | 車体傾斜装置 | |
| CN110861543B (zh) | 车辆座椅控制方法及装置 | |
| CN111406015B (zh) | 机动车辆以及用于运行机动车辆的方法 | |
| JP7342627B2 (ja) | 車両制御システム | |
| JP2019031218A (ja) | 接触検出方法及び接触検出装置 | |
| JP6708089B2 (ja) | 乗物用シート | |
| JP4059258B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| WO2021033516A1 (ja) | シート制御装置 | |
| EP4714739A1 (en) | Vehicle seat | |
| JP2008290668A (ja) | ドライバー支援装置 | |
| JP2013209061A (ja) | ヘッドランプの光軸制御装置 | |
| JP2007253664A (ja) | 車両用運転姿勢調節装置、運転姿勢調節方法および運転姿勢調節装置付き車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20859752 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021544005 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2020859752 Country of ref document: EP Effective date: 20220228 |