WO2021019662A1 - 交流回転電機の制御装置及び電動パワーステアリング装置 - Google Patents
交流回転電機の制御装置及び電動パワーステアリング装置 Download PDFInfo
- Publication number
- WO2021019662A1 WO2021019662A1 PCT/JP2019/029746 JP2019029746W WO2021019662A1 WO 2021019662 A1 WO2021019662 A1 WO 2021019662A1 JP 2019029746 W JP2019029746 W JP 2019029746W WO 2021019662 A1 WO2021019662 A1 WO 2021019662A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- axis
- command value
- voltage command
- current
- vibration
- Prior art date
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/05—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation specially adapted for damping motor oscillations, e.g. for reducing hunting
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0463—Controlling the motor calculating assisting torque from the motor based on driver input
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/22—Current control, e.g. using a current control loop
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/10—Arrangements for controlling torque ripple, e.g. providing reduced torque ripple
Definitions
- the present application relates to a control device for an AC rotary electric machine and an electric power steering device.
- the q-axis correction value WFBq for correcting the q-axis voltage command value GFBq is based on the P control value PFBq of the current feedback control. Is calculated.
- Paragraph 0056 of Patent Document 2 describes that the q-axis correction value WFBq has the opposite phase of the q-axis current detection value, and in FIGS. 9A and 9B of Patent Document 2, the q-axis correction value has the opposite phase. It can be confirmed that there is.
- the q-axis correction value WFBq is a feedback control for ripple suppression that is executed separately from the normal feedback control in order to suppress the ripple of the q-axis current. Has been done.
- Patent Document 1 and Patent Document 2 are configured to suppress current distortion or vibration by superimposing a correction voltage on a voltage command value.
- the torque ripple component cannot always be suppressed by suppressing the distortion or vibration of the current.
- the torque constant ratio of torque and current
- the torque constant may fluctuate according to the magnetic pole position due to spatial harmonics caused by magnetic saturation. In particular, this tendency becomes large in low-priced AC rotary electric machines that do not sufficiently take measures against fluctuations in torque constants. Due to the fluctuation of the torque constant, the torque ripple component is superimposed on the output torque. Further, the torque ripple component due to the fluctuation of the torque constant does not appear in the current detection value. Therefore, in order to cancel the torque ripple component, it is necessary to superimpose the current vibration component for canceling the torque ripple component on the winding current in a feedforward manner.
- the torque ripple component is a harmonic component (for example, 6th order) of the rotation frequency of the magnetic pole position
- the frequency of the torque ripple component increases as the rotational angular velocity of the rotor (magnetic pole position) increases. Therefore, even if the canceling current vibration component is superimposed on the current command value, the frequency of the current vibration component becomes higher than the cutoff frequency of the current feedback control when the rotation angle speed becomes high, and the actual winding current is set to the current command value. It becomes impossible to follow the current vibration component of. Therefore, in the method of superimposing the canceling current vibration component on the current command value, there is a problem that the canceling current vibration component cannot be superposed on the winding current and the torclip component cannot be canceled in the high rotation range. there were.
- the AC rotating electric machine is a kind of inductive load
- a control device and an electric power steering device of an AC rotating electric machine capable of superimposing a canceling current that cancels the torque ripple component on the winding current in a feed-forward manner and canceling the torque ripple component are desired.
- the control device for an AC rotary electric machine is a control device for an AC rotary electric machine that controls an AC rotary electric machine having a stator and a rotor provided with windings via an inverter.
- a magnetic pole position detection unit that detects the magnetic pole position of the rotor, and On the rotating coordinate system of the dq axis, which consists of the d-axis determined in the direction of the detected magnetic pole position and the q-axis determined in the direction 90 degrees ahead of the d-axis by the electric angle, the basic voltage command value of the d-axis and A basic voltage command value calculation unit that calculates the basic voltage command value of the q-axis, A vibration voltage command value calculation unit that has the same frequency as the torque ripple component superimposed on the output torque of the rotor and calculates the vibration voltage command value of the q-axis for canceling the torque ripple component.
- a plurality of switching elements included in the inverter are provided. It is equipped with a switching control unit that controls on / off.
- the vibration voltage command value calculation unit calculates the anti-phase of the torque ripple component based on the current information flowing through the winding and the magnetic pole position, and in the cycle of the vibration voltage command value of the q-axis, the q-axis
- the correction phase corresponding to the phase delay of the actual current with respect to the vibration voltage command value is calculated, and the phase of the vibration voltage command value of the q-axis is set to the phase obtained by advancing the opposite phase of the torque ripple component by the correction phase. It is a thing.
- the electric power steering device includes the above-mentioned control device for the AC rotary electric machine and the AC rotary electric machine which is a driving force source for the wheel steering device.
- the q-axis vibration voltage command value for canceling the torque ripple component is superimposed on the q-axis voltage command value, so that the torque ripple component is canceled.
- the canceling current can be superposed on the winding current in a feed-forward manner. Further, since the antiphase of the torque ripple component is calculated based on the current information flowing through the winding and the magnetic pole position, the phase of the torque ripple component and its antiphase based on the magnetic pole position changing according to the winding current can be obtained. It can be calculated with high accuracy.
- the correction phase corresponding to the phase delay of the actual current with respect to the vibration voltage command value of the q-axis is calculated, and the phase of the vibration voltage command value of the q-axis is set to the phase in which the opposite phase of the torque ripple component is advanced by the correction phase. Will be done. Therefore, the q-axis vibration voltage command value that compensates for the phase shift between the voltage command value and the winding current and the torque ripple component can be calculated, and the torque ripple component can be canceled with high accuracy.
- FIG. It is a schematic block diagram of the AC rotary electric machine and the control device which concerns on Embodiment 1.
- FIG. It is a schematic block diagram of the control device of the AC rotary electric machine which concerns on Embodiment 1.
- FIG. It is a hardware block diagram of the control device of the AC rotary electric machine which concerns on Embodiment 1.
- FIG. It is a figure for demonstrating the theoretical lead phase and the correction phase which concerns on Embodiment 1.
- FIG. It is a block diagram of the vibration voltage command value calculation part which concerns on Embodiment 1.
- FIG. It is a figure explaining the relationship between the interlinkage magnetic flux of the q-axis and the q-axis current which concerns on Embodiment 1.
- FIG. It is a figure explaining the relationship between the q-axis current and the q-axis inductance value which concerns on Embodiment 1.
- FIG. It is a block diagram of the vibration voltage command value calculation part which concerns on Embodiment 2.
- FIG. It is a time chart which concerns on the comparative example of Embodiment 3. It is a time chart which concerns on Embodiment 3. It is a time chart which concerns on Embodiment 3.
- FIG. 1 is a schematic configuration diagram of an AC rotary electric machine 1, an inverter 20, and a control device 30 according to the present embodiment.
- AC rotary electric machine 1 is a synchronous AC rotary electric machine having a stator provided with a plurality of phases of windings and a rotor.
- the stator is provided with three-phase windings Cu, Cv, and Cw of U phase, V phase, and W phase.
- the three-phase windings Cu, Cv, and Cw are star-connected.
- the three-phase winding may be a delta connection.
- a permanent magnet is provided in the rotor made of the electromagnetic steel plate, and the AC rotary electric machine 1 is a permanent magnet type synchronous AC rotary electric machine.
- the AC rotary electric machine 1 includes a rotation sensor 2 that outputs an electric signal according to the rotation angle of the rotor.
- the rotation sensor 2 is a Hall element, an encoder, a resolver, or the like.
- the output signal of the rotation sensor 2 is input to the control device 30.
- the inverter 20 is a power conversion device that performs power conversion between the DC power supply 10 and the three-phase winding, and has a plurality of switching elements.
- the switching element 23H (upper arm) on the positive electrode side connected to the positive electrode side of the DC power supply 10 and the switching element 23L (lower arm) on the negative electrode side connected to the negative electrode side of the DC power supply 10 are connected in series.
- Three sets of series circuits (legs) are provided corresponding to the windings of each of the three phases.
- the inverter 20 includes three switching elements 23H on the positive electrode side and three switching elements 23L on the negative electrode side, for a total of six switching elements. A connection point in which the switching element 23H on the positive electrode side and the switching element 23L on the negative electrode side are connected in series is connected to the winding of the corresponding phase.
- the collector terminal of the switching element 23H on the positive electrode side is connected to the electric wire 25 on the positive electrode side
- the emitter terminal of the switching element 23H on the positive electrode side is the collector of the switching element 23L on the negative electrode side.
- the emitter terminal of the switching element 23L on the negative electrode side is connected to the terminal and is connected to the electric wire 26 on the negative electrode side.
- the connection point between the switching element 23H on the positive electrode side and the switching element 23L on the negative electrode side is connected to the winding of the corresponding phase.
- an IGBT Insulated Gate Bipolar Transistor
- MOSFET Metal Oxide Semiconductor Field Effect Transistor
- the gate terminal of each switching element is connected to the control device 30.
- Each switching element is turned on or off by a control signal output from the control device 30.
- the smoothing capacitor 24 is connected between the positive electrode side electric wire 25 and the negative electrode side electric wire 26.
- a power supply voltage sensor 3 for detecting the power supply voltage VDC supplied from the DC power supply 10 to the inverter 20 is provided.
- the power supply voltage sensor 3 is connected between the positive electrode side electric wire 25 and the negative electrode side electric wire 26.
- the output signal of the power supply voltage sensor 3 is input to the control device 30.
- the current sensor 4 outputs an electric signal corresponding to the current flowing through the windings of each phase.
- the current sensor 4 is provided on the electric wire of each phase connecting the series circuit of the switching element and the winding.
- the output signal of the current sensor 4 is input to the control device 30.
- the current sensor 4 may be provided in the series circuit of each phase.
- a charge / dischargeable power storage device (for example, a lithium ion battery, a nickel hydrogen battery, an electric double layer capacitor) is used for the DC power supply 10.
- the DC power supply 10 may be provided with a DC-DC converter, which is a DC power converter that boosts or lowers the DC voltage.
- Control device 30 The control device 30 controls the AC rotary electric machine 1 via the inverter 20. As shown in FIG. 2, the control device 30 includes a magnetic pole position detection unit 31, a current detection unit 32, a dq axis current conversion unit 33, a power supply voltage detection unit 34, a current command value calculation unit 35, and a basic voltage command value calculation unit 36. , Vibration voltage command value calculation unit 37, switching control unit 38, current command correction value calculation unit 39, and the like. Each function of the control device 30 is realized by a processing circuit provided in the control device 30. Specifically, as shown in FIG.
- the control device 30 includes an arithmetic processing unit 90 (computer) such as a CPU (Central Processing Unit), a storage device 91 for exchanging data with the arithmetic processing unit 90, as a processing circuit.
- arithmetic processing unit 90 such as a CPU (Central Processing Unit)
- a storage device 91 for exchanging data with the arithmetic processing unit 90, as a processing circuit.
- An input circuit 92 for inputting an external signal to the arithmetic processing unit 90, an output circuit 93 for outputting a signal from the arithmetic processing unit 90 to the outside, and the like are provided.
- the arithmetic processing unit 90 As the arithmetic processing unit 90, an ASIC (Application Specific Integrated Circuit), an IC (Integrated Circuit), a DSP (Digital Signal Processor), an FPGA (Field Programmable Gate Array), various logic circuits, various signal processing circuits, and the like are provided. You may. Further, a plurality of arithmetic processing units 90 of the same type or different types may be provided, and each processing may be shared and executed.
- the storage device 91 includes a RAM (Random Access Memory) configured to be able to read and write data from the arithmetic processing unit 90, a ROM (Read Only Memory) configured to be able to read data from the arithmetic processing unit 90, and the like. Has been done.
- the input circuit 92 is connected to various sensors and switches such as a power supply voltage sensor 3, a current sensor 4, and a rotation sensor 2, and an A / D converter or the like that inputs the output signals of these sensors and switches to the arithmetic processing device 90. I have.
- the output circuit 93 is provided with a drive circuit or the like to which an electric load such as a gate drive circuit for driving the switching element on / off is connected and a control signal is output from the arithmetic processing unit 90 to the electric load.
- the arithmetic processing unit 90 executes software (program) stored in the storage device 91 such as ROM, and the storage device 91, It is realized by cooperating with other hardware of the control device 30 such as the input circuit 92 and the output circuit 93.
- the current phase setting data, correction phase setting data, inductance setting data, winding resistance value R, order N, inductance L, and other setting data used by each of the control units 31 to 39 are part of the software (program). Is stored in a storage device 91 such as a ROM.
- a storage device 91 such as a ROM.
- Magnetic pole position detecting unit 31 detects the magnetic pole position ⁇ (rotation angle ⁇ of the rotor) of the rotor at the electric angle.
- the magnetic pole position detection unit 31 detects the magnetic pole position ⁇ (rotation angle ⁇ ) of the rotor based on the output signal of the rotation sensor 2.
- the magnetic pole position is set to the direction of the north pole of the permanent magnet provided in the rotor. Further, the magnetic pole position detection unit 31 performs a differential calculation with respect to the magnetic pole position ⁇ to calculate the rotation angular velocity ⁇ of the magnetic pole position of the rotor at the electric angle.
- the magnetic pole position detection unit 31 estimates the rotation angle (magnetic pole position) and rotation angular velocity based on the current information obtained by superimposing the harmonic component on the current command value, etc., without using the rotation sensor. It may be configured in (so-called sensorless system).
- the current detection unit 32 detects the three-phase currents Iur, Ivr, and Iwr flowing in the windings of each of the three phases.
- the current detection unit 32 detects the three-phase currents Iur, Ivr, and Iwr flowing from the inverter 20 to the windings Cu, Cv, and Cw of each of the three phases based on the output signal of the current sensor 4.
- Iur is the U-phase current detection value
- Ivr is the V-phase current detection value
- Iwr is the W-phase current detection value.
- the dq-axis current conversion unit 33 converts the three-phase current detection values Iur, Ivr, and Iwr into the d-axis current detection value Idr and the q-axis current detection value Iqr on the dq-axis rotating coordinate system. Convert.
- the rotating coordinate system of the dq axis is a two-axis rotating coordinate consisting of a d-axis determined in the direction of the detected magnetic pole position ⁇ and a q-axis determined in a direction 90 ° ahead of the d-axis by an electric angle, and is a rotor magnetic pole. It rotates in synchronization with the rotation of the position.
- the dq-axis current conversion unit 33 performs three-phase two-phase conversion and rotational coordinate conversion on the three-phase current detection values Iur, Ivr, and Iwr based on the magnetic pole position ⁇ , and detects the d-axis current. It is converted into the value Idr and the current detection value Iqr on the q-axis.
- the power supply voltage detection unit 34 detects the power supply voltage VDC supplied from the DC power supply 10 to the inverter 20. In the present embodiment, the power supply voltage detection unit 34 detects the power supply voltage VDC based on the output signal of the power supply voltage sensor 3.
- the current command value calculation unit 35 calculates the current command value Ido on the d-axis and the current command value Iqo on the q-axis.
- the d-axis current command value Ido and the q-axis current command value Iqo are calculated.
- the target torque may be transmitted from an external device or may be calculated in the control device 30.
- the q-axis vibration current command value ⁇ Iqoc calculated by the current command correction value calculation unit 39 described later is superimposed on the q-axis current command value Iqo, and the superimposed current command value is final. It is calculated as the current command value Iqo of the q-axis (Iqo ⁇ Iqo + ⁇ Iqc).
- Basic voltage command value calculation unit The basic voltage command value calculation unit 36 calculates the basic voltage command value Vdb on the d-axis and the basic voltage command value Vqob on the q-axis on the rotating coordinate system of the dq axis.
- the d-axis current detection value Idr approaches the d-axis current command value Ido
- the q-axis current detection value Iqr approaches the q-axis current command value Iqo.
- the current feedback control for changing the basic voltage command value Vdob on the d-axis and the basic voltage command value Vqob on the q-axis is configured.
- the basic voltage command value calculation unit 36 sets the d-axis current deviation between the d-axis current detection value Idr and the d-axis current command value Ido, and the q-axis current detection value Iqr and the q-axis current command value Iqo.
- the control calculation such as PI control based on the q-axis current deviation is performed to calculate the d-axis basic voltage command value Vdb and the q-axis basic voltage command value Vqob.
- the switching control unit 38 is based on the d-axis basic voltage command value Vdb and the q-axis voltage command value Vqo in which the q-axis vibration voltage command value ⁇ Vqc, which will be described later, is superimposed on the q-axis basic voltage command value Vqo.
- the plurality of switching elements included in the inverter 20 are controlled on and off.
- the voltage coordinate conversion unit 38a performs fixed coordinate conversion and two-phase three-phase conversion on the basic voltage command value Vdob on the d-axis and the voltage command value Vqo on the q-axis based on the magnetic pole position ⁇ , and performs three-phase conversion.
- the voltage command values Vuo, Vvo, and Vwo are calculated.
- the PWM control unit 38b compares each of the three-phase voltage command values Vuo, Vvo, and Vwo with a carrier wave (triangular wave) that vibrates with an amplitude of the power supply voltage VDC / 2 centered on 0 at the carrier frequency, and causes a voltage command. When the value exceeds the carrier wave, the rectangular pulse wave is turned on, and when the voltage command value falls below the carrier wave, the rectangular pulse wave is turned off.
- the PWM control unit 40b outputs a control signal corresponding to the rectangular pulse wave of each of the three phases to the inverter 20 to turn on / off each switching element of the inverter 20.
- the positive electrode side switching element and the negative electrode side switching element of each phase are not turned on at the same time, and the positive electrode side switching element is turned on between the positive electrode side switching element on period and the negative electrode side switching element on period.
- a short-circuit prevention time may be provided in which both the switching element on the side and the switching element on the negative electrode side are turned off at the same time.
- the torque constant ratio of torque and current
- the torque ripple component Due to the fluctuation of the torque constant, the torque ripple component is superimposed on the output torque. Further, the torque ripple component due to the fluctuation of the torque constant does not appear in the current detection value. Therefore, in order to cancel the torque ripple component, it is necessary to superimpose the current vibration component for canceling the torque ripple component on the winding current in a feedforward manner.
- the torque ripple component is a harmonic component (for example, sixth order) of the rotation frequency of the magnetic pole position ⁇
- the frequency of the torque ripple component increases as the rotational angular velocity of the rotor (magnetic pole position) increases. Therefore, even if the cancellation current vibration component is superimposed on the current command value, when the rotation angle speed becomes high, the frequency of the current vibration component becomes higher than the cutoff frequency of the current feedback control, and the actual winding current is set to the current command value. It becomes impossible to follow the current vibration component of. Therefore, in the method of superimposing the canceling current vibration component on the current command value, there is a problem that the canceling current vibration component cannot be superposed on the winding current and the torclip component cannot be canceled in the high rotation range. there were.
- the canceling voltage vibration component is superimposed on the voltage command value after the processing of the current feedback control.
- the canceling current vibration component can be superimposed on the winding current without being affected by the cutoff frequency of the current feedback control.
- it is necessary to calculate the canceling voltage vibration component in consideration of the deviation. The theory for that is explained below.
- T is the output torque of the rotor
- Pm is the pole logarithm
- ⁇ is the interlinkage magnetic flux
- Ld is the d-axis inductance
- Lq is the q-axis inductance.
- the output torque T changes according to the q-axis current Iq and the d-axis current Id.
- the second term on the right side of the equation (1) is smaller than the first term on the right side, and the output torque T changes substantially in proportion to the q-axis current Iq.
- the torque ripple component described above is generated by the interlinkage magnetic flux ⁇ fluctuating according to the magnetic pole position ⁇ , and the torque constant is approximately Pm ⁇ ⁇ .
- the torque ripple component ⁇ T can be expressed by the following equation.
- Trp0 is the amplitude of the torque ripple component
- ⁇ rp0 is the phase of the torque ripple component with respect to the N times value of the magnetic pole position ⁇ .
- the phase ⁇ rp0 of the torque ripple component is not the rotation period of the magnetic pole position ⁇ but the phase in the period of the torque ripple component.
- the amplitude Trp0 and the phase ⁇ rp0 of the torque ripple component change according to the d-axis current Id and the q-axis current Iq, and become a function of these.
- the waveform of the torque ripple component ⁇ T is acquired by electromagnetic field analysis or actual measurement, and the relational characteristics between the amplitude Trp0 and the d-axis current Id and the q-axis current Iq, and The relationship characteristics between the phase ⁇ rp0 and the d-axis current Id and the q-axis current Iq are identified.
- the canceling q-axis current ⁇ Iqc for canceling the torque ripple component ⁇ T of the equation (2) is given by the following equation.
- Iqrp0 is the amplitude of the canceling q-axis current ⁇ Iqc, and is a value obtained by dividing the amplitude Trp0 of the torque ripple component by the pole logarithm Pm and the interlinkage magnetic flux ⁇ .
- the interlinkage magnetic flux ⁇ of the equation (3) is an average value without considering the fluctuation depending on the magnetic pole position.
- the canceling q-axis current ⁇ Iqc has the opposite phase of the torque ripple component ⁇ T, and the amplitude is multiplied by 1 / (Pm ⁇ ⁇ ).
- the amplitude Iqrp0 of the canceling q-axis current also changes according to the d-axis current Id and the q-axis current Iq, and becomes a function of these, similarly to the amplitude Trp0 of the torque ripple component.
- Vd is the d-axis voltage
- Vq is the q-axis voltage
- R is the resistance value of the winding
- ⁇ a is the interlinkage magnetic flux due to the permanent magnet
- p is the differential operator. Is.
- equation (7) When equation (7) is transformed by synthesizing trigonometric functions, it can be expressed as the following equation.
- arctan is an inverse tangent function.
- the cancellation q-axis voltage ⁇ Vqc is obtained by multiplying the amplitude by the theoretical amplitude gain ⁇ r and advancing the phase by the theoretical advance phase ⁇ r with respect to the cancellation q-axis current ⁇ Iqc of the equation (3). ..
- the theoretical lead phase ⁇ r is a sign inversion value of the phase lag of the q-axis current Iq with respect to the q-axis voltage Vq applied to the winding, and becomes a positive value.
- the theoretical lead phase ⁇ r is a so-called impedance angle.
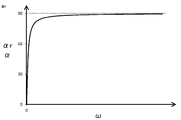
- the theoretical amplitude gain ⁇ r is the reciprocal of the amplitude gain of the q-axis current Iq with respect to the q-axis voltage Vq applied to the winding. As shown in FIG. 4, the theoretical lead phase ⁇ r increases from 0 to 90 degrees ( ⁇ / 2) as the rotational angular velocity ⁇ at the magnetic pole position increases from 0.
- the vibration voltage command value calculation unit 37 has the same frequency as the torque ripple component superimposed on the output torque of the rotor, and calculates the vibration voltage command value ⁇ Vqoc of the q-axis for canceling the torque ripple component.
- the vibration voltage command value calculation unit 37 calculates the opposite phase of the torque ripple component based on the current information flowing through the winding and the magnetic pole position ⁇ , and the vibration voltage command of the q axis in the cycle of the vibration voltage command value ⁇ Vqoc of the q axis.
- the correction phase ⁇ corresponding to the phase delay of the actual current with respect to the value ⁇ Vqoc is calculated, and the phase of the vibration voltage command value ⁇ Vqoc on the q-axis is set to the phase in which the opposite phase of the torque ripple component is advanced by the correction phase ⁇ .
- the q-axis vibration voltage command value ⁇ Vqoc for canceling the torque ripple component is superimposed on the q-axis voltage command value Vqo, so that even in the high rotation range, due to the influence of the cutoff frequency of the current feedback control. It is not cut off, and the canceling current can be superimposed on the winding current, and the torque ripple component can be canceled.
- the antiphase of the torque ripple component is calculated based on the current information flowing through the winding and the magnetic pole position ⁇ , the phase of the torque ripple component based on the magnetic pole position ⁇ that changes according to the winding current and vice versa.
- the phase can be calculated accurately.
- the correction phase ⁇ corresponding to the phase delay of the actual current with respect to the vibration voltage command value ⁇ Vqoc on the q-axis is calculated, and the phase of the vibration voltage command value ⁇ Vqoc on the q-axis advances the antiphase of the torque ripple component by the correction phase ⁇ . It is set to the phase. Therefore, the q-axis vibration voltage command value ⁇ Vqoc that compensates for the phase shift between the voltage command value and the winding current and the torque ripple component can be calculated, and the torque ripple component can be canceled with high accuracy.
- the vibration voltage command value calculation unit 37 calculates the vibration voltage command value ⁇ Vqoc on the q-axis by using the following equation.
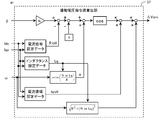
- FIG. 5 shows a block diagram of the vibration voltage command value calculation unit 37 according to the present embodiment.
- equation (9) (N ⁇ ⁇ rp0 ⁇ ) is the antiphase of the torque ripple component, ⁇ is the correction phase, and ( ⁇ ⁇ Iqrp0) is the amplitude.
- the vibration voltage command value calculation unit 37 subtracts the phase ⁇ rp0 of the torque ripple component with respect to the multiplication value of the magnetic pole position ⁇ and the order N from the multiplication value of the magnetic pole position ⁇ and the order N, and ⁇ . Subtract (or add) (180 degrees) to calculate the antiphase (N ⁇ ⁇ rp0 ⁇ ) of the torque ripple component.
- the vibration voltage command value calculation unit 37 calculates the phase ⁇ rp0 of the torque ripple component based on the current information flowing through the winding.
- the vibration voltage command value calculation unit 37 refers to the current phase setting data in which the relationship between the d-axis current Id and the q-axis current Iq and the phase ⁇ rp0 of the torque ripple component is preset, and refers to the current d-axis current d.
- the phase ⁇ rp0 of the torque ripple component corresponding to the current command value Ido of the shaft and the current command value Iqo of the q-axis is calculated.
- the d-axis current detection value Idr and the q-axis current detection value Iqr may be used.
- the current phase setting data is map data, an approximation function, or the like. As described above, the waveforms of the torque ripple component ⁇ T at each operating point of the d-axis current Id and the q-axis current Iq are acquired by electromagnetic field analysis or actual measurement, and the current phase setting data is preset based on the acquired data. Will be done.
- the vibration voltage command value calculation unit 37 uses the following equation similar to the calculation equation of the theoretical lead phase ⁇ r of the third equation of the equation (8), and the frequency of the torque ripple component with respect to the rotation frequency of the magnetic pole position.
- the correction phase ⁇ is calculated based on the order N of, the rotational angular velocity ⁇ at the electric angle of the magnetic pole position, the inductance L of the AC rotating electric machine, and the resistance value R of the winding.
- the resistance value R of the winding may be set to a fixed value or may be changed according to the winding temperature or the like.
- the inductance L is the q-axis inductance Lq.
- the q-axis inductance Lq may be a fixed value, or may be changed according to current information or the like, as will be described later.
- the vibration voltage command value calculation unit 37 refers to the correction phase setting data in which the relationship between the rotation angular velocity ⁇ and the inductance L (q-axis inductance Lq in this example) and the correction phase ⁇ is preset, and the current rotation.
- the correction phase ⁇ corresponding to the angular velocity ⁇ and the current inductance L may be calculated.
- the vibration voltage command value calculation unit 37 refers to the correction phase setting data in which the relationship between the rotation angular velocity ⁇ and the correction phase ⁇ is preset, and sets the current rotation angular velocity ⁇ .
- the corresponding correction phase ⁇ may be calculated.
- the correction phase setting data is preset based on the equation (10) or the experimental data.
- the correction phase setting data is map data, an approximation function, or the like.
- the vibration voltage command value calculation unit 37 sets the correction phase ⁇ in the cycle of the vibration voltage command value of the q-axis from 90 degrees as the rotation angular velocity ⁇ of the magnetic pole position decreases. Decrease within the range up to 0 degrees.
- the vibration voltage command value calculation unit 37 refers to the inductance setting data in which the relationship between the d-axis current and the q-axis current and the q-axis inductance Lq is preset, and refers to the current d-axis and q-axis current command values Ido and Iqo.
- the q-axis inductance Lq corresponding to the current d-axis and q-axis current detection values Idr and Iqr may be calculated.
- Inductance setting data is set in advance based on the data acquired by electromagnetic field analysis or actual measurement. For example, at each operating point of the d-axis current and the q-axis current, the slope ⁇ / ⁇ Iq of the change ⁇ of the interlinkage magnetic flux with respect to the change ⁇ Iq of the q-axis current is calculated, and the slope ⁇ / ⁇ Iq is set as the q-axis inductance Lq. ..
- FIG. 6 is an example of the relational characteristics between the q-axis interlinkage magnetic flux ⁇ q and the q-axis current Iq when the q-axis current Iq is swept at the operating point of a certain d-axis current Id. This characteristic is obtained by electromagnetic field analysis or actual measurement.
- the minute change ⁇ q of the interlinkage magnetic flux of the q-axis with respect to the minute change ⁇ Iq of the q-axis current Iq is obtained, and the slope ⁇ q / ⁇ Iq is obtained.
- the slope ⁇ q / ⁇ Iq is obtained as the q-axis inductance Lq at the operating point.
- the q-axis interlinkage magnetic flux ⁇ q is made dimensionless by ⁇ q1 in which a fixed value is set.
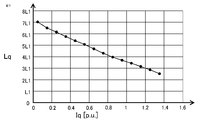
- FIG. 7 is a diagram plotting the q-axis inductance Lq (slope ⁇ q / ⁇ Iq) obtained at the operating point of each q-axis current Iq.
- the q-axis inductance Lq is dimensionless by L1 for which a fixed value is set.
- FIG. 7 is a diagram plotting the q-axis inductance Lq (slope ⁇ q / ⁇ Iq) obtained at the operating point of each q-axis current Iq.
- the q-axis inductance Lq is dimensionless by L1 for which a fixed value is set.
- the q-axis inductance Lq decreases as the q-axis current Iq increases. This is because the relationship characteristic between the q-axis interlinkage magnetic flux ⁇ q and the q-axis current Iq is not a straight line due to the influence of magnetic saturation, but the slope changes according to the q-axis current Iq. In particular, in the region where the q-axis current Iq is large, the slope is reduced and the q-axis inductance Lq is reduced. Therefore, even in the case of an AC rotating electric machine in which the inductance fluctuates due to magnetic saturation according to the winding current, the inductance setting accuracy can be improved.
- the vibration voltage command value calculation unit 37 calculates the amplitude Iqrp0 of the current on the q-axis for canceling the torque ripple component based on the current information flowing through the winding.
- the vibration voltage command value calculation unit 37 refers to the current amplitude setting data in which the relationship between the d-axis current Id and the q-axis current Iq and the q-axis current amplitude Iqrp0 is preset, and is present.
- the amplitude Iqrp0 of the current on the q-axis corresponding to the current command value Ido on the d-axis and the current command value Iqo on the q-axis is calculated.
- the d-axis current command value Ido and the q-axis current command value Iqo may be used.
- the current amplitude setting data is map data, an approximation function, or the like.
- the waveforms of the torque ripple component ⁇ T at each operating point of the d-axis current Id and the q-axis current Iq are acquired by electromagnetic field analysis or actual measurement, and the obtained amplitude Trp0 of the torque ripple component ⁇ T is the pole pair Pm and
- the amplitude Iqrp0 of the current on the q-axis is calculated by dividing by the interlinkage magnetic flux ⁇ , and the current amplitude setting data is set in advance using the calculated amplitude Iqrp0 of the current on the q-axis.
- the vibration voltage command value calculation unit 37 uses the same equation as the calculation equation of the theoretical amplitude gain ⁇ r of the second equation of the equation (8), and uses the following equation, the frequency N of the torque ripple component with respect to the rotation frequency of the magnetic pole position, and the magnetic pole position.
- the amplitude gain ⁇ is calculated based on the rotation angle velocity ⁇ at the electric angle, the inductance L of the AC rotating electric machine, and the resistance value R of the winding. Then, as shown in the equation (9), the vibration voltage command value calculation unit 37 sets the multiplication value ( ⁇ ⁇ Iqrp0) of the amplitude Iqrp0 of the q-axis current and the amplitude gain ⁇ into the vibration voltage command value ⁇ Vqoc of the q-axis. Set to the amplitude of.
- the values of the order N, the inductance L, and the resistance value R are the same as those in the case of the correction phase ⁇ of the above equation (10), and the inductance L has the q-axis inductance Lq. Used.
- the vibration voltage command value calculation unit 37 refers to the amplitude gain setting data in which the relationship between the rotation angle velocity ⁇ and the inductance L (q-axis inductance Lq in this example) and the amplitude gain ⁇ is set in advance, and the current rotation.
- the amplitude gain ⁇ corresponding to the angular velocity ⁇ and the current inductance L may be calculated.
- the vibration voltage command value calculation unit 37 refers to the amplitude gain setting data in which the relationship between the rotation angular velocity ⁇ and the amplitude gain ⁇ is set in advance, and sets the current rotation angular velocity ⁇ .
- the corresponding amplitude gain ⁇ may be calculated.
- the amplitude gain setting data is preset based on the equation (11) or the experimental data.
- the correction phase setting data is map data, an approximation function, or the like.
- the vibration voltage command value calculation unit 37 increases the amplitude of the vibration voltage command value ⁇ Vqoc on the q-axis as the rotational angular velocity ⁇ of the magnetic pole position increases. Further, the vibration voltage command value calculation unit 37 increases the amplitude of the vibration voltage command value on the q-axis as the inductance L increases.
- the current command correction value calculation unit 39 calculates the q-axis vibration current command value ⁇ Iqoc for canceling the torque ripple component, which has the same frequency as the torque ripple component ⁇ T and has the opposite phase of the torque ripple component. Then, as described above, the vibration current command value ⁇ Iqoc on the q-axis is superimposed on the current command value Iqo on the q-axis.
- the current command correction value calculation unit 39 calculates the vibration current command value ⁇ Iqoc of the q-axis by using the following equation.
- (N ⁇ ⁇ rp0 ⁇ ) is the opposite phase of the torque ripple component
- Iqrp0 is the amplitude.
- phase ⁇ rp0 of the torque ripple component and the amplitude Iqrp0 of the current on the q-axis are calculated by the same method as the vibration voltage command value calculation unit 37, and in the present embodiment, they are calculated by the vibration voltage command value calculation unit 37. Is used.
- the current command correction value calculation unit 39 determines the q-axis vibration current command value as described above. ⁇ Iqoc is calculated and superimposed on the current command value Iqo on the q-axis, and when the rotational angular velocity ⁇ is higher than the speed threshold, the vibration current command value ⁇ Iqoc on the q-axis is not calculated and is set to the current command value Iqo on the q-axis. It may be configured so that it does not overlap.
- the vibration voltage command value calculation unit 37 determines the vibration voltage command value of the q-axis. ⁇ Vqoc is calculated and superimposed on the voltage command value Vqo on the q-axis, and when the rotational angular velocity ⁇ is lower than the speed threshold, the vibration voltage command value ⁇ Vqoc on the q-axis is not calculated and is set to the voltage command value Vqo on the q-axis. It may be configured so that it does not overlap.
- both the superposition of the current command value Iqo on the q-axis and the superposition of the voltage command value Vqo on the q-axis may be executed.
- FIG. 8 is a block diagram of the vibration voltage command value calculation unit according to the present embodiment.
- the control system can be simplified by utilizing the fact that the theoretical lead phase ⁇ r approaches 90 degrees in the high rotation range where it is necessary to superimpose the canceling voltage vibration component on the voltage command value. Further, as shown in FIG. 4, when the rotational angular velocity ⁇ increases from 0, the theoretical advance phase ⁇ r rapidly approaches 90 degrees. Therefore, when the rotational angular velocity ⁇ increases to some extent, the correction error can be reduced even if the correction phase ⁇ is set to ⁇ / 2 (90 degrees).
- the vibration voltage command value calculation unit 37 calculates the q-axis vibration voltage command value ⁇ Vqoc as described above, and the q-axis voltage command value Vqo. If the rotation angular velocity ⁇ is lower than the start threshold value, the q-axis vibration voltage command value ⁇ Vqoc may not be calculated and may be configured not to be superimposed on the q-axis voltage command value Vqo.
- the start threshold value is set to the rotational angular velocity ⁇ at which the difference between the theoretical lead phase ⁇ r and ⁇ / 2 (90 degrees) becomes a tolerance (for example, 10 degrees).
- the vibration voltage command value calculation unit 37 has the order N of the frequency of the torque ripple component with respect to the rotation frequency of the magnetic pole position, the rotation angular velocity ⁇ at the electric angle of the magnetic pole position, as shown in the following equation.
- the multiplication value of the inductance L of the AC rotary electric machine is calculated as the amplitude gain ⁇ .
- the inductance L is the q-axis inductance Lq, and may be changed according to current information or the like as in the first embodiment.
- the vibration voltage command value calculation unit 37 calculates the amplitude Iqrp0 of the current on the q-axis for canceling the torque ripple component based on the current information flowing through the winding, as in the first embodiment. Then, as shown in the equation (9), the vibration voltage command value calculation unit 37 sets the multiplication value of the amplitude Iqrp0 of the q-axis current and the amplitude gain ⁇ to the amplitude of the vibration voltage command value ⁇ Vqoc of the q-axis. ..
- control system can be simplified by utilizing the fact that the amplitude gain ⁇ approaches N, ⁇ , and L in the high rotation range where it is necessary to superimpose the canceling voltage vibration component on the voltage command value. ..
- the vibration voltage command value calculation unit 37 increases the amplitude of the vibration voltage command value ⁇ Vqoc on the q-axis in proportion to the rotation angular velocity ⁇ of the magnetic pole position. Further, the vibration voltage command value calculation unit 37 increases the amplitude of the vibration voltage command value on the q-axis in proportion to the inductance L.
- the vibration voltage command value calculation unit 37 may calculate the amplitude gain ⁇ with reference to the amplitude gain setting data.
- the vibration voltage command value calculation unit 37 determines the q-axis vibration voltage as described above.
- the command value ⁇ Vqoc is calculated and superimposed on the voltage command value Vqo on the q-axis. If the rotational angular velocity ⁇ is lower than the speed threshold, the vibration voltage command value ⁇ Vqoc on the q-axis is not calculated and the voltage command value on the q-axis is not calculated. It may be configured not to be superimposed on Vqo.
- the q-axis vibration voltage command value ⁇ Vqoc is superimposed in the high rotation range where the theoretical lead phase ⁇ r approaches 90 degrees and the theoretical amplitude gain ⁇ r approaches N, ⁇ , and L, so that the correction phase is corrected. Even if ⁇ is simply set to ⁇ / 2 (90 degrees) and the amplitude gain ⁇ is simply set to N, ⁇ , L, the occurrence of correction error can be suppressed and the torque ripple component can be canceled.
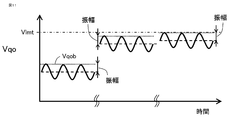
- the upper limit limit value of the voltage applied to the winding is determined by the power supply voltage VDC, and the upper limit value of the d-axis voltage command value and the q-axis voltage command value is also determined. Therefore, as shown in the time chart according to the comparative example of FIG. 9, the vibration of the q-axis is performed so that the voltage command value Vqo of the q-axis after the superposition of the vibration voltage command value ⁇ Vqoc of the q-axis does not exceed the upper limit limit value Vlmt.
- the peak portion of the voltage command value ⁇ Vqoc is cut. Only the cut peak part cannot cancel the torque ripple component, and the cancellation becomes insufficient.
- the vibration voltage command value calculation unit 37 prevents the voltage command value Vqo on the q-axis after superimposition from exceeding the upper limit limit value Vlmt by superimposing the vibration voltage command value ⁇ Vqoc on the q-axis.
- the vibration voltage command value ⁇ Vqc on the q-axis is reduced in an offset manner.
- the peak portion of the vibration voltage command value ⁇ Vqoc on the q-axis can be prevented from being cut by the upper limit limit value Vlmt, and the effect of canceling the torque ripple component is impaired by the upper limit limit of the voltage command value on the q-axis. You can avoid it.
- the vibration voltage command value calculation unit 37 adds the amplitude ( ⁇ ⁇ Iqrp0) of the vibration voltage command value of the q axis to the basic voltage command value Vqob of the q axis before correction.
- the vibration voltage command value ⁇ Vqoc of the q-axis is reduced by the offset value ⁇ Voff obtained by subtracting the upper limit limit value Vlmt from the maximum value Vqmax before correction, and the q-axis after offset.
- the vibration voltage command value ⁇ Vqoc_off of is calculated, and the offset q-axis vibration voltage command value ⁇ Vqoc_off is superimposed on the q-axis basic voltage command value Vqob to calculate the q-axis voltage command value Vqo.
- the vibration voltage command value calculation unit 37 does not perform offset correction, and the vibration voltage command value ⁇ Vqoc on the q axis is used as it is as the basic voltage command value on the q axis.
- the voltage command value Vqo of the q-axis is calculated by superimposing it on Vqob.
- the minimum offset value ⁇ Voff in which the peak portion of the vibration voltage command value ⁇ Vqoc on the q-axis is not cut by the upper limit limit value Vlmt can be set, and the q-axis can be set. It is possible to minimize the fluctuation of the average value of the voltage command value Vqo on the q-axis from the basic voltage command value Vqo of. Therefore, it is possible to minimize the fluctuation of the average value of the output torque in order to cancel the torque ripple component.
- the vibration voltage command value calculation unit 37 calculates the q-axis vibration voltage command value ⁇ Vqoc that vibrates between 0 and the value obtained by multiplying the amplitude ( ⁇ ⁇ Iqrp0) of the q-axis vibration voltage command value by -2. It may be configured to do so.
- the vibration voltage command value calculation unit 37 subtracts the amplitude ( ⁇ ⁇ Iqrp0) of the vibration voltage command value of the q axis from the vibration voltage command value ⁇ Vqoc of the q axis as shown in the following equation to offset.
- the later q-axis vibration voltage command value ⁇ Vqoc_off is calculated, and the offset q-axis vibration voltage command value ⁇ Vqoc_off is superimposed on the q-axis basic voltage command value Vqob to calculate the q-axis voltage command value Vqo.
- Embodiment 4 Next, the control device 30 according to the fourth embodiment will be described. The description of the same components as in the first embodiment will be omitted.
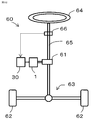
- the basic configuration and processing of the AC rotary electric machine 1 and the control device 30 according to the present embodiment are the same as those of the first, second, or third embodiments, but the AC rotary electric machine 1 and the control device 30 are electric power steering devices. It differs from the first, second, or third embodiment in that it is incorporated in the 60.
- the AC rotary electric machine 1 is a driving force source for the steering device 63 of the wheels 62.
- the AC rotary electric machine 1 and the control device 30 constitute an electric power steering device 60.
- the rotating shaft of the rotor of the AC rotary electric machine 1 is connected to the steering device 63 of the wheel 62 via the driving force transmission mechanism 61.
- the electric power steering device 60 is attached to a handle 64 in which the driver rotates left and right, a shaft 65 which is connected to the handle 64 and transmits the steering torque of the handle 64 to the steering device 63 of the wheel 62, and a shaft 65. It is provided with a torque sensor 66 that detects the steering torque Ts by the handle 64, and a driving force transmission mechanism 61 such as a worm gear mechanism that connects the rotating shaft of the AC rotary electric machine 1 to the shaft 65.
- the output signal of the torque sensor 66 is input to the control device 30 (input circuit 92), and the control device 30 detects the driver's steering torque Ts based on the output signal of the torque sensor 66. Then, the current command value calculation unit 35 calculates the current command value for assisting the steering torque Ts based on the steering torque Ts. For example, the current command value calculation unit 35 calculates the current command value Iqo on the q-axis by multiplying the steering torque Ts by the assist gain Ka, as shown in the following equation. The current command value Ido on the d-axis is set to 0.
- the assist gain Ka may be changed according to the traveling speed of the own vehicle and the like.
- the current command value calculation unit 35 uses maximum torque current control, weakening magnetic flux control, and the like based on the target torque and the like calculated based on the steering torque Ts, and uses the d-axis and q-axis current command values Ido and Iqo. May be calculated.
- the torque ripple component of the order N (for example, the sixth order) is superimposed. Due to the torque ripple component, (1) the steering feeling of the steering wheel is deteriorated, and (2) the noise increases when the frequency of the torque ripple component matches the mechanical resonance frequency. In order to suppress these (1) and (2), it is necessary to superimpose the canceling current vibration component on the winding current as in the first to third embodiments.
- the current feedback is performed by superimposing the vibration current command value ⁇ Iqoc on the q-axis on the current command value Iqo on the q-axis.
- the canceling current vibration component can be superimposed on the winding current, and the steering feeling of the handle can be improved.
- the frequency of the canceling current vibration component is a high frequency of 300 Hz to 4000 Hz. Therefore, since a frequency higher than the cutoff frequency of the current feedback control is included, it is not enough to superimpose the q-axis vibration current command value ⁇ Iqoc on the q-axis current command value Iqo, and the q-axis vibration voltage command.
- ⁇ Vqoc By superimposing the value ⁇ Vqoc on the voltage command value Vqo on the q-axis, it is possible to superimpose the canceling current vibration component on the winding current, and it is possible to suppress the increase in noise due to resonance. Therefore, an inexpensive AC rotating electric machine having a variable torque constant can be used for the electric power steering device 60.
- the number of phases of the winding may be any number of phases, a plurality of sets of windings may be provided, and the motor control as in each embodiment may be performed for each set of windings. ..
- the AC rotary electric machine 1 is a permanent magnet type synchronous AC rotary electric machine.
- the embodiments of the present application are not limited to this. That is, the AC rotary electric machine 1 may be various rotary electric machines such as an electromagnet type synchronous AC rotary electric machine and an induction rotary electric machine.
- the vibration voltage command value calculation unit 37 may calculate the vibration voltage command value ⁇ Vdoc on the d-axis by using the following equation and superimpose it on the basic voltage command value Vdb on the d-axis.
- (N ⁇ ⁇ rp0) is the phase of the torque ripple component
- ( ⁇ ⁇ L ⁇ Iqrp0) is the amplitude.
- the inductance L the q-axis inductance Lq is used.
- phase ⁇ rp0 of the torque ripple component with respect to the N times value of the magnetic pole position ⁇ , the amplitude Iqrp0 of the current on the q-axis, and the inductance Lq on the q-axis are calculated by the same method as in each of the above embodiments.
- the degree N may be any natural number other than 6.
- the vibration voltage command value ⁇ Vqoc on the q-axis and the vibration current command value ⁇ Iqoc on the q-axis for each torque ripple component are calculated, and q of the plurality of orders is calculated.
- the total value of the vibration voltage command value ⁇ Vqoc of the shaft and the vibration current command value ⁇ Iqoc of the q-axis may be superimposed on the voltage command value Vqo of the q-axis and the current command value Iqo of the q-axis.
- the AC rotary electric machine 1 serves as a driving force source for the steering device 63 of the wheels 62, and the AC rotary electric machine 1 and the control device 30 are incorporated in the electric power steering device 60.
- the case has been described as an example.
- the embodiments of the present application are not limited to this.
- the AC rotating electric machine 1 may serve as a driving force source for a device (for example, a wheel) other than the steering device 63, and the AC rotating electric machine 1 and the control device 30 may be a device other than the electric power steering device 60 (for example, a vehicle). It may be incorporated in a power unit).
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Control Of Ac Motors In General (AREA)
Abstract
トルクリップル成分を打ち消す打消し電流を巻線電流にフィードフォワード的に重畳させ、トルクリップル成分を打ち消すことができる交流回転電機の制御装置及び電動パワーステアリング装置を提供する。トルクリップル成分(ΔT)と同じ周波数を有し、q軸の振動電圧指令値(ΔVqoc)を算出し、電流情報及び磁極位置(θ)に基づいてトルクリップル成分の逆位相を算出し、q軸の振動電圧指令値(ΔVqoc)に対する実電流の位相遅れに対応する補正位相(α)を算出し、q軸の振動電圧指令値の位相を、トルクリップル成分の逆位相を補正位相(α)だけ進めた位相に設定する交流回転電機の制御装置(30)。
Description
本願は、交流回転電機の制御装置及び電動パワーステアリング装置に関するものである。
交流回転電機を制御するに際し、出力トルクに重畳するトルクリップル成分を低減することが望まれる。特許文献1の技術では、特許文献1の段落0033、図2及び段落0041等に記載されているように、基本波の交流電圧を巻線に印加しても、磁気飽和に起因した空間高調波により、巻線電流が基本波から歪み、電流の歪みによりトルクリップル成分が生じるため、巻線に基本波電流を流すための高調波の補正電圧vdh、vqhを電圧指令に重畳するように構成されている。
また、特許文献2の技術では、特許文献2の図2等に示されているように、q軸電圧指令値GFBqを補正するq軸補正値WFBqは、電流フィードバック制御のP制御値PFBqに基づいて算出されている。特許文献2の段落0056に、q軸補正値WFBqは、q軸電流検出値の逆位相になると記載されており、特許文献2の図9(a)、(b)において、逆位相になっていることが確認できる。また、特許文献2の段落0058に、q軸補正値WFBqは、q軸電流のリップルを抑制するために、通常のフィードバック制御とは別途に実行されるリップル抑制のためのフィードバック制御であると記載されている。
特許文献1及び特許文献2の技術は、電圧指令値に補正電圧を重畳することにより、電流の歪み又は振動を抑えるように構成されている。しかしながら、交流回転電機においては、電流の歪み又は振動を抑えれば、トルクリップル成分を抑えられるとは限らない。交流回転電機では、磁気飽和に起因した空間高調波等により、トルク定数(トルクと電流との比)が磁極位置に応じて変動する場合がある。特に、トルク定数の変動に対する対策が十分でない廉価な交流回転電機では、この傾向が大きくなる。このトルク定数の変動により、出力トルクには、トルクリップル成分が重畳する。また、トルク定数の変動によるトルクリップル成分は、電流検出値には表れない。そのため、トルクリップル成分を打ち消すためには、トルクリップル成分を打ち消すための電流振動成分を、巻線電流にフィードフォワード的に重畳させる必要がある。
しかし、トルクリップル成分は、磁極位置の回転周波数の高調波成分(例えば、6次)であるため、ロータ(磁極位置)の回転角速度が増加するに従って、トルクリップル成分の周波数が増加する。よって、電流指令値に打消し電流振動成分を重畳させても、回転角速度が高くなると、電流振動成分の周波数が、電流フィードバック制御のカットオフ周波数よりも高くなり、実巻線電流を電流指令値の電流振動成分に追従させることができなくなる。よって、電流指令値に打消し電流振動成分を重畳させる方法では、高回転域になると、巻線電流に打消し電流振動成分を重畳させることができず、トルクリップ成分を打ち消すことができない問題があった。
また、交流回転電機は、一種の誘導性負荷であるため、交流回転電機が回転している場合において、q軸電流とq軸電圧との間には位相のズレがある。そのため、特許文献2のように、q軸補正電圧の位相を、q軸電流の位相と同じトルクリップル成分の逆位相に設定したのでは、トルクリップル成分を精度良く打ち消すことができない。
そこで、トルクリップル成分を打ち消す打消し電流を巻線電流にフィードフォワード的に重畳させ、トルクリップル成分を打ち消すことができる交流回転電機の制御装置及び電動パワーステアリング装置が望まれる。
本願に係る交流回転電機の制御装置は、巻線を設けたステータとロータとを有する交流回転電機を、インバータを介して制御する交流回転電機の制御装置であって、
前記ロータの磁極位置を検出する磁極位置検出部と、
検出した前記磁極位置の方向に定めたd軸及び前記d軸より電気角で90度進んだ方向に定めたq軸からなるdq軸の回転座標系上において、前記d軸の基本電圧指令値及び前記q軸の基本電圧指令値を算出する基本電圧指令値算出部と、
前記ロータの出力トルクに重畳するトルクリップル成分と同じ周波数を有し、前記トルクリップル成分を打ち消すための前記q軸の振動電圧指令値を算出する振動電圧指令値算出部と、
前記d軸の基本電圧指令値、及び前記q軸の基本電圧指令値に前記q軸の振動電圧指令値を重畳した前記q軸の電圧指令値に基づいて、前記インバータが有する複数のスイッチング素子をオンオフ制御するスイッチング制御部と、を備え、
前記振動電圧指令値算出部は、前記巻線を流れる電流情報及び前記磁極位置に基づいて前記トルクリップル成分の逆位相を算出し、前記q軸の振動電圧指令値の周期における、前記q軸の振動電圧指令値に対する実電流の位相遅れに対応する補正位相を算出し、前記q軸の振動電圧指令値の位相を、前記トルクリップル成分の前記逆位相を前記補正位相だけ進めた位相に設定するものである。
前記ロータの磁極位置を検出する磁極位置検出部と、
検出した前記磁極位置の方向に定めたd軸及び前記d軸より電気角で90度進んだ方向に定めたq軸からなるdq軸の回転座標系上において、前記d軸の基本電圧指令値及び前記q軸の基本電圧指令値を算出する基本電圧指令値算出部と、
前記ロータの出力トルクに重畳するトルクリップル成分と同じ周波数を有し、前記トルクリップル成分を打ち消すための前記q軸の振動電圧指令値を算出する振動電圧指令値算出部と、
前記d軸の基本電圧指令値、及び前記q軸の基本電圧指令値に前記q軸の振動電圧指令値を重畳した前記q軸の電圧指令値に基づいて、前記インバータが有する複数のスイッチング素子をオンオフ制御するスイッチング制御部と、を備え、
前記振動電圧指令値算出部は、前記巻線を流れる電流情報及び前記磁極位置に基づいて前記トルクリップル成分の逆位相を算出し、前記q軸の振動電圧指令値の周期における、前記q軸の振動電圧指令値に対する実電流の位相遅れに対応する補正位相を算出し、前記q軸の振動電圧指令値の位相を、前記トルクリップル成分の前記逆位相を前記補正位相だけ進めた位相に設定するものである。
本願に係る電動パワーステアリング装置は、上記の交流回転電機の制御装置と、車輪の操舵装置の駆動力源となる前記交流回転電機と、を備えたものである。
本願に係る交流回転電機の制御装置又は電動パワーステアリング装置によれば、q軸の電圧指令値に、トルクリップル成分を打ち消すためのq軸の振動電圧指令値を重畳するので、トルクリップル成分を打ち消す打消し電流を巻線電流にフィードフォワード的に重畳させることができる。また、巻線を流れる電流情報及び磁極位置に基づいてトルクリップル成分の逆位相が算出されるので、巻線電流に応じて変化する磁極位置を基準としたトルクリップル成分の位相及びその逆位相を精度良く算出することができる。更に、q軸の振動電圧指令値に対する実電流の位相遅れに対応する補正位相が算出され、q軸の振動電圧指令値の位相が、トルクリップル成分の逆位相を補正位相だけ進めた位相に設定される。よって、電圧指令値と巻線電流及びトルクリップル成分との間の位相のズレを補償したq軸の振動電圧指令値が算出され、トルクリップル成分を精度よく打ち消すことができる。
1.実施の形態1
実施の形態1に係る交流回転電機の制御装置30(以下、単に、制御装置30と称す)について図面を参照して説明する。図1は、本実施の形態に係る交流回転電機1、インバータ20、及び制御装置30の概略構成図である。
実施の形態1に係る交流回転電機の制御装置30(以下、単に、制御装置30と称す)について図面を参照して説明する。図1は、本実施の形態に係る交流回転電機1、インバータ20、及び制御装置30の概略構成図である。
1-1.交流回転電機
交流回転電機1は、複数相の巻線を設けたステータと、ロータと、を有する同期交流回転電機とされている。本実施の形態では、ステータにU相、V相、W相の3相の巻線Cu、Cv、Cwが設けられている。3相巻線Cu、Cv、Cwは、スター結線とされている。なお、3相巻線は、デルタ結線とされてもよい。電磁鋼板により構成されたロータには、永久磁石が設けられており、交流回転電機1は、永久磁石型の同期交流回転電機とされている。
交流回転電機1は、複数相の巻線を設けたステータと、ロータと、を有する同期交流回転電機とされている。本実施の形態では、ステータにU相、V相、W相の3相の巻線Cu、Cv、Cwが設けられている。3相巻線Cu、Cv、Cwは、スター結線とされている。なお、3相巻線は、デルタ結線とされてもよい。電磁鋼板により構成されたロータには、永久磁石が設けられており、交流回転電機1は、永久磁石型の同期交流回転電機とされている。
交流回転電機1は、ロータの回転角度に応じた電気信号を出力する回転センサ2を備えている。回転センサ2は、ホール素子、エンコーダ、又はレゾルバ等とされる。回転センサ2の出力信号は、制御装置30に入力される。
1-2.インバータ等
インバータ20は、直流電源10と3相巻線との間で電力変換を行う電力変換装置であり、複数のスイッチング素子を有している。インバータ20は、直流電源10の正極側に接続される正極側のスイッチング素子23H(上アーム)と直流電源10の負極側に接続される負極側のスイッチング素子23L(下アーム)とが直列接続された直列回路(レッグ)を、3相各相の巻線に対応して3セット設けている。インバータ20は、3つの正極側のスイッチング素子23Hと、3つの負極側のスイッチング素子23Lとの、合計6つのスイッチング素子を備えている。そして、正極側のスイッチング素子23Hと負極側のスイッチング素子23Lとが直列接続されている接続点が、対応する相の巻線に接続されている。
インバータ20は、直流電源10と3相巻線との間で電力変換を行う電力変換装置であり、複数のスイッチング素子を有している。インバータ20は、直流電源10の正極側に接続される正極側のスイッチング素子23H(上アーム)と直流電源10の負極側に接続される負極側のスイッチング素子23L(下アーム)とが直列接続された直列回路(レッグ)を、3相各相の巻線に対応して3セット設けている。インバータ20は、3つの正極側のスイッチング素子23Hと、3つの負極側のスイッチング素子23Lとの、合計6つのスイッチング素子を備えている。そして、正極側のスイッチング素子23Hと負極側のスイッチング素子23Lとが直列接続されている接続点が、対応する相の巻線に接続されている。
具体的には、各相の直列回路において、正極側のスイッチング素子23Hのコレクタ端子は、正極側電線25に接続され、正極側のスイッチング素子23Hのエミッタ端子は、負極側のスイッチング素子23Lのコレクタ端子に接続され、負極側のスイッチング素子23Lのエミッタ端子は、負極側電線26に接続されている。正極側のスイッチング素子23Hと負極側のスイッチング素子23Lとの接続点は、対応する相の巻線に接続されている。スイッチング素子には、ダイオード22が逆並列接続されたIGBT(Insulated Gate Bipolar Transistor)、又は逆並列接続されたダイオードの機能を有するMOSFET(Metal Oxide Semiconductor Field Effect Transistor)等が用いられる。各スイッチング素子のゲート端子は、制御装置30に接続されている。各スイッチング素子は、制御装置30から出力される制御信号によりオン又はオフされる。
平滑コンデンサ24が、正極側電線25と負極側電線26との間に接続される。直流電源10からインバータ20に供給される電源電圧VDCを検出する電源電圧センサ3が備えられている。電源電圧センサ3は、正極側電線25と負極側電線26との間に接続されている。電源電圧センサ3の出力信号は、制御装置30に入力される。
電流センサ4は、各相の巻線に流れる電流に応じた電気信号を出力する。電流センサ4は、スイッチング素子の直列回路と巻線とをつなぐ各相の電線上に備えられている。電流センサ4の出力信号は、制御装置30に入力される。なお、電流センサ4は、各相の直列回路に備えられてもよい。
直流電源10には、充放電可能な蓄電装置(例えば、リチウムイオン電池、ニッケル水素電池、電気二重層キャパシタ)が用いられる。なお、直流電源10には、直流電圧を昇圧したり降圧したりする直流電力変換器であるDC-DCコンバータが設けられてもよい。
1-3.制御装置30
制御装置30は、インバータ20を介して交流回転電機1を制御する。図2に示すように、制御装置30は、磁極位置検出部31、電流検出部32、dq軸電流変換部33、電源電圧検出部34、電流指令値算出部35、基本電圧指令値算出部36、振動電圧指令値算出部37、スイッチング制御部38、電流指令補正値算出部39等を備えている。制御装置30の各機能は、制御装置30が備えた処理回路により実現される。具体的には、制御装置30は、図3に示すように、処理回路として、CPU(Central Processing Unit)等の演算処理装置90(コンピュータ)、演算処理装置90とデータのやり取りする記憶装置91、演算処理装置90に外部の信号を入力する入力回路92、及び演算処理装置90から外部に信号を出力する出力回路93等を備えている。
制御装置30は、インバータ20を介して交流回転電機1を制御する。図2に示すように、制御装置30は、磁極位置検出部31、電流検出部32、dq軸電流変換部33、電源電圧検出部34、電流指令値算出部35、基本電圧指令値算出部36、振動電圧指令値算出部37、スイッチング制御部38、電流指令補正値算出部39等を備えている。制御装置30の各機能は、制御装置30が備えた処理回路により実現される。具体的には、制御装置30は、図3に示すように、処理回路として、CPU(Central Processing Unit)等の演算処理装置90(コンピュータ)、演算処理装置90とデータのやり取りする記憶装置91、演算処理装置90に外部の信号を入力する入力回路92、及び演算処理装置90から外部に信号を出力する出力回路93等を備えている。
演算処理装置90として、ASIC(Application Specific Integrated Circuit)、IC(Integrated Circuit)、DSP(Digital Signal Processor)、FPGA(Field Programmable Gate Array)、各種の論理回路、及び各種の信号処理回路等が備えられてもよい。また、演算処理装置90として、同じ種類のもの又は異なる種類のものが複数備えられ、各処理が分担して実行されてもよい。記憶装置91として、演算処理装置90からデータを読み出し及び書き込みが可能に構成されたRAM(Random Access Memory)、演算処理装置90からデータを読み出し可能に構成されたROM(Read Only Memory)等が備えられている。入力回路92は、電源電圧センサ3、電流センサ4、回転センサ2等の各種のセンサ、スイッチが接続され、これらセンサ、スイッチの出力信号を演算処理装置90に入力するA/D変換器等を備えている。出力回路93は、スイッチング素子をオンオフ駆動するゲート駆動回路等の電気負荷が接続され、これら電気負荷に演算処理装置90から制御信号を出力する駆動回路等を備えている。
そして、制御装置30が備える図2の各制御部31~39等の各機能は、演算処理装置90が、ROM等の記憶装置91に記憶されたソフトウェア(プログラム)を実行し、記憶装置91、入力回路92、及び出力回路93等の制御装置30の他のハードウェアと協働することにより実現される。なお、各制御部31~39等が用いる電流位相設定データ、補正位相設定データ、インダクタンス設定データ、巻線の抵抗値R、次数N、インダクタンスL等の設定データは、ソフトウェア(プログラム)の一部として、ROM等の記憶装置91に記憶されている。以下、制御装置30の各機能について詳細に説明する。
1-3-1.磁極位置検出部
磁極位置検出部31は、電気角でのロータの磁極位置θ(ロータの回転角度θ)を検出する。本実施の形態では、磁極位置検出部31は、回転センサ2の出力信号に基づいて、ロータの磁極位置θ(回転角度θ)を検出する。本実施の形態では、磁極位置は、ロータに設けられた永久磁石のN極の向きに設定される。また、磁極位置検出部31は、磁極位置θに対して微分演算を行って、電気角でのロータの磁極位置の回転角速度ωを算出する。
磁極位置検出部31は、電気角でのロータの磁極位置θ(ロータの回転角度θ)を検出する。本実施の形態では、磁極位置検出部31は、回転センサ2の出力信号に基づいて、ロータの磁極位置θ(回転角度θ)を検出する。本実施の形態では、磁極位置は、ロータに設けられた永久磁石のN極の向きに設定される。また、磁極位置検出部31は、磁極位置θに対して微分演算を行って、電気角でのロータの磁極位置の回転角速度ωを算出する。
なお、磁極位置検出部31は、電流指令値に高調波成分を重畳することによって得られる電流情報等に基づいて、回転センサを用いずに、回転角度(磁極位置)及び回転角速度を推定するように構成されてもよい(いわゆる、センサレス方式)。
1-3-2.電流検出部
電流検出部32は、3相各相の巻線に流れる3相の電流Iur、Ivr、Iwrを検出する。本実施の形態では、電流検出部32は、電流センサ4の出力信号に基づいて、インバータ20から3相各相の巻線Cu、Cv、Cwに流れる3相の電流Iur、Ivr、Iwrを検出する。ここで、Iurが、U相の電流検出値であり、Ivrが、V相の電流検出値であり、Iwrが、W相の電流検出値である。
電流検出部32は、3相各相の巻線に流れる3相の電流Iur、Ivr、Iwrを検出する。本実施の形態では、電流検出部32は、電流センサ4の出力信号に基づいて、インバータ20から3相各相の巻線Cu、Cv、Cwに流れる3相の電流Iur、Ivr、Iwrを検出する。ここで、Iurが、U相の電流検出値であり、Ivrが、V相の電流検出値であり、Iwrが、W相の電流検出値である。
1-3-3.dq軸電流変換部
dq軸電流変換部33は、3相の電流検出値Iur、Ivr、Iwrを、dq軸の回転座標系上のd軸の電流検出値Idr及びq軸の電流検出値Iqrに変換する。dq軸の回転座標系は、検出した磁極位置θの方向に定めたd軸及びd軸より電気角で90°進んだ方向に定めたq軸からなる2軸の回転座標であり、ロータの磁極位置の回転に同期して回転する。具体的には、dq軸電流変換部33は、3相の電流検出値Iur、Ivr、Iwrを、磁極位置θに基づいて3相2相変換及び回転座標変換を行って、d軸の電流検出値Idr及びq軸の電流検出値Iqrに変換する。
dq軸電流変換部33は、3相の電流検出値Iur、Ivr、Iwrを、dq軸の回転座標系上のd軸の電流検出値Idr及びq軸の電流検出値Iqrに変換する。dq軸の回転座標系は、検出した磁極位置θの方向に定めたd軸及びd軸より電気角で90°進んだ方向に定めたq軸からなる2軸の回転座標であり、ロータの磁極位置の回転に同期して回転する。具体的には、dq軸電流変換部33は、3相の電流検出値Iur、Ivr、Iwrを、磁極位置θに基づいて3相2相変換及び回転座標変換を行って、d軸の電流検出値Idr及びq軸の電流検出値Iqrに変換する。
1-3-4.電源電圧検出部
電源電圧検出部34は、直流電源10からインバータ20に供給される電源電圧VDCを検出する。本実施の形態では、電源電圧検出部34は、電源電圧センサ3の出力信号に基づいて、電源電圧VDCを検出する。
電源電圧検出部34は、直流電源10からインバータ20に供給される電源電圧VDCを検出する。本実施の形態では、電源電圧検出部34は、電源電圧センサ3の出力信号に基づいて、電源電圧VDCを検出する。
1-3-5.電流指令値算出部
電流指令値算出部35は、d軸の電流指令値Ido及びq軸の電流指令値Iqoを算出する。本実施の形態では、電流指令値算出部35は、目標トルク、電源電圧VDC、及び回転角速度ω等に基づいて、最大トルク電流制御、弱め磁束制御、及びId=0制御などの公知の電流ベクトル制御方法を用いて、d軸の電流指令値Ido及びq軸の電流指令値Iqoを算出する。目標トルクは、外部の装置から伝達されてもよいし、制御装置30内で演算されてもよい。
電流指令値算出部35は、d軸の電流指令値Ido及びq軸の電流指令値Iqoを算出する。本実施の形態では、電流指令値算出部35は、目標トルク、電源電圧VDC、及び回転角速度ω等に基づいて、最大トルク電流制御、弱め磁束制御、及びId=0制御などの公知の電流ベクトル制御方法を用いて、d軸の電流指令値Ido及びq軸の電流指令値Iqoを算出する。目標トルクは、外部の装置から伝達されてもよいし、制御装置30内で演算されてもよい。
本実施の形態では、後述する電流指令補正値算出部39により算出されたq軸の振動電流指令値ΔIqocが、q軸の電流指令値Iqoに重畳され、重畳後の電流指令値が最終的なq軸の電流指令値Iqoとして算出される(Iqo←Iqo+ΔIqc)。
1-3-6.基本電圧指令値算出部
基本電圧指令値算出部36は、dq軸の回転座標系上において、d軸の基本電圧指令値Vdob及びq軸の基本電圧指令値Vqobを算出する。
基本電圧指令値算出部36は、dq軸の回転座標系上において、d軸の基本電圧指令値Vdob及びq軸の基本電圧指令値Vqobを算出する。
本実施の形態では、基本電圧指令値算出部36は、d軸の電流検出値Idrがd軸の電流指令値Idoに近づき、q軸の電流検出値Iqrがq軸の電流指令値Iqoに近づくように、d軸の基本電圧指令値Vdob及びq軸の基本電圧指令値Vqobを変化させる電流フィードバック制御を行うように構成されている。
例えば、基本電圧指令値算出部36は、d軸の電流検出値Idrとd軸の電流指令値Idoとのd軸電流偏差、及びq軸の電流検出値Iqrとq軸の電流指令値Iqoとのq軸電流偏差に基づくPI制御等の制御演算を行って、d軸の基本電圧指令値Vdob及びq軸の基本電圧指令値Vqobを算出する。
1-3-7.スイッチング制御部
スイッチング制御部38は、d軸の基本電圧指令値Vdob、及びq軸の基本電圧指令値Vqobに後述するq軸の振動電圧指令値ΔVqocを重畳したq軸の電圧指令値Vqoに基づいて、インバータ20が有する複数のスイッチング素子をオンオフ制御する。本例では、q軸の基本電圧指令値Vqobにq軸の振動電圧指令値ΔVqocが加算されて、q軸の電圧指令値Vqoが算出される(Vqo=Vqob+ΔVqoc)。
スイッチング制御部38は、d軸の基本電圧指令値Vdob、及びq軸の基本電圧指令値Vqobに後述するq軸の振動電圧指令値ΔVqocを重畳したq軸の電圧指令値Vqoに基づいて、インバータ20が有する複数のスイッチング素子をオンオフ制御する。本例では、q軸の基本電圧指令値Vqobにq軸の振動電圧指令値ΔVqocが加算されて、q軸の電圧指令値Vqoが算出される(Vqo=Vqob+ΔVqoc)。
電圧座標変換部38aは、d軸の基本電圧指令値Vdob及びq軸の電圧指令値Vqoに対して、磁極位置θに基づいて、固定座標変換及び2相3相変換を行って、3相の電圧指令値Vuo、Vvo、Vwoを算出する。
PWM制御部38bは、3相の電圧指令値Vuo、Vvo、Vwoのそれぞれと、キャリア周波数で0を中心に電源電圧VDC/2の振幅で振動するキャリア波(三角波)とを比較し、電圧指令値がキャリア波を上回った場合は、矩形パルス波をオンし、電圧指令値がキャリア波を下回った場合は、矩形パルス波をオフする。PWM制御部40bは、3相各相の矩形パルス波に応じた制御信号をインバータ20に出力し、インバータ20の各スイッチング素子をオンオフさせる。なお、各相の正極側のスイッチング素子及び負極側のスイッチング素子が同時にオンにならないように、各相の正極側のスイッチング素子のオン期間と負極側のスイッチング素子のオン期間との間に、正極側のスイッチング素子及び負極側のスイッチング素子の双方が同時にオフになる短絡防止時間(デッドタイム)が設けられてもよい。
1-3-8.振動電圧指令値算出部
<電流指令値によるトルクリップ成分の打消しの課題>
交流回転電機では、磁気飽和に起因した空間高調波等により、トルク定数(トルクと電流との比)が磁極位置θに応じて変動する場合がある。特に、トルク定数の変動に対する対策が十分でない廉価な交流回転電機では、この傾向が大きくなる。このトルク定数の変動により、出力トルクには、トルクリップル成分が重畳する。また、トルク定数の変動によるトルクリップル成分は、電流検出値には表れない。そのため、トルクリップル成分を打ち消すためには、トルクリップル成分を打ち消すための電流振動成分を、巻線電流にフィードフォワード的に重畳させる必要がある。
<電流指令値によるトルクリップ成分の打消しの課題>
交流回転電機では、磁気飽和に起因した空間高調波等により、トルク定数(トルクと電流との比)が磁極位置θに応じて変動する場合がある。特に、トルク定数の変動に対する対策が十分でない廉価な交流回転電機では、この傾向が大きくなる。このトルク定数の変動により、出力トルクには、トルクリップル成分が重畳する。また、トルク定数の変動によるトルクリップル成分は、電流検出値には表れない。そのため、トルクリップル成分を打ち消すためには、トルクリップル成分を打ち消すための電流振動成分を、巻線電流にフィードフォワード的に重畳させる必要がある。
しかし、トルクリップル成分は、磁極位置θの回転周波数の高調波成分(例えば、6次)であるため、ロータ(磁極位置)の回転角速度が増加するに従って、トルクリップル成分の周波数が増加する。よって、電流指令値に打消し電流振動成分を重畳させても、回転角速度が高くなると、電流振動成分の周波数が、電流フィードバック制御のカットオフ周波数よりも高くなり、実巻線電流を電流指令値の電流振動成分に追従させることができなくなる。よって、電流指令値に打消し電流振動成分を重畳させる方法では、高回転域になると、巻線電流に打消し電流振動成分を重畳させることができず、トルクリップ成分を打ち消すことができない問題があった。
<電圧指令値によるトルクリップ成分の打消しの理論説明>
そこで、本実施の形態では、電流フィードバック制御の処理後の電圧指令値に、打消し電圧振動成分を重畳させるように構成されている。このように構成すれば、電流フィードバック制御のカットオフ周波数の影響を受けることなく、巻線電流に打消し電流振動成分を重畳させることができる。しかし、電圧指令値と巻線電流及びトルクリップル成分との間には、位相及び振幅のズレがあるため、そのズレを考慮した打消し電圧振動成分を算出する必要がある。以下で、そのための理論について説明する。
そこで、本実施の形態では、電流フィードバック制御の処理後の電圧指令値に、打消し電圧振動成分を重畳させるように構成されている。このように構成すれば、電流フィードバック制御のカットオフ周波数の影響を受けることなく、巻線電流に打消し電流振動成分を重畳させることができる。しかし、電圧指令値と巻線電流及びトルクリップル成分との間には、位相及び振幅のズレがあるため、そのズレを考慮した打消し電圧振動成分を算出する必要がある。以下で、そのための理論について説明する。
交流回転電機のトルク式は、次式のようになる。

ここで、Tは、ロータの出力トルクであり、Pmは、極対数であり、ψは、鎖交磁束であり、Ldは、d軸インダクタンスであり、Lqは、q軸インダクタンスである。
式(1)から、出力トルクTは、q軸電流Iqとd軸電流Idに応じて変化することがわかる。通常、式(1)の右辺第2項は、右辺第1項に比べて小さく、出力トルクTは、概ねq軸電流Iqに比例して変化する。上述したトルクリップル成分は、鎖交磁束ψが、磁極位置θに応じて変動することにより生じ、トルク定数は、概ねPm・ψとなる。
磁極位置の回転周波数に対するトルクリップル成分の周波数の次数をNとすると、トルクリップル成分ΔTは次式で表せる。
ここで、Trp0は、トルクリップル成分の振幅であり、θrp0は、磁極位置θのN倍値に対するトルクリップル成分の位相である。トルクリップル成分の位相θrp0は、磁極位置θの回転周期ではなく、トルクリップル成分の周期における位相となっている。
トルクリップル成分の振幅Trp0及び位相θrp0は、d軸電流Id及びq軸電流Iqに応じて変化し、これらの関数となる。d軸電流Id及びq軸電流Iqの各動作点において、トルクリップル成分ΔTの波形を、電磁界解析又は実測により取得し、振幅Trp0とd軸電流Id及びq軸電流Iqとの関係特性、及び位相θrp0とd軸電流Id及びq軸電流Iqとの関係特性が同定される。
式(2)のトルクリップル成分ΔTを打ち消すための打消しq軸電流ΔIqcは次式となる。

ここで、Iqrp0は、打消しq軸電流ΔIqcの振幅であり、トルクリップル成分の振幅Trp0を極対数Pm及び鎖交磁束ψで除算した値になる。なお、式(3)の鎖交磁束ψは、磁極位置に応じた変動が考慮されていない、平均値である。打消しq軸電流ΔIqcは、トルクリップル成分ΔTの逆位相になり、振幅を、1/(Pm・ψ)倍したものになる。打消しq軸電流の振幅Iqrp0も、トルクリップル成分の振幅Trp0と同様に、d軸電流Id及びq軸電流Iqに応じて変化し、これらの関数になる。
次に、打消しq軸電流ΔIqcから電圧指令値への変換を説明する。交流回転電機の電圧方程式は次式のようになる。

ここで、Vdは、d軸電圧であり、Vqは、q軸電圧であり、Rは、巻線の抵抗値であり、ψaは、永久磁石による鎖交磁束であり、pは、微分演算子である。
式(4)のq軸電流Iqに、打消しq軸電流ΔIqcを重畳させたq軸電流Iq+ΔIqを代入すると次式を得る。なお、トルクリップル成分を打ち消すために、d軸電流を変化させない。

式(5)から式(4)を減算すると、打消しq軸電流ΔIqcを打消しq軸電圧ΔVqc及び打消しd軸電圧ΔVdcに変換する次式を得る。

本実施の形態では、打消しd軸電圧ΔVdcの項(-ω・Lq・ΔIq)を無視する。式(6)の打消しq軸電圧ΔVqcの項に、式(3)を代入すると次式を得る。

式(7)を三角関数の合成により変形すると、次式のように表せる。

ここで、arctanは、逆正接関数である。式(8)より、打消しq軸電圧ΔVqcは、式(3)の打消しq軸電流ΔIqcに対して、振幅を理論振幅ゲインβr倍し、位相を理論進み位相αrだけ進めたものになる。
なお、理論進み位相αrは、巻線に印加するq軸電圧Vqに対するq軸電流Iqの位相遅れの符号反転値になり、正の値になる。理論進み位相αrは、いわゆるインピーダンス角である。また、理論振幅ゲインβrは、巻線に印加するq軸電圧Vqに対するq軸電流Iqの振幅ゲインの逆数になる。図4に示すように、理論進み位相αrは、磁極位置の回転角速度ωが0から増加するに従って、0から90度(π/2)まで増加する。
<q軸の振動電圧指令値ΔVqocの算出>
そこで、振動電圧指令値算出部37は、ロータの出力トルクに重畳するトルクリップル成分と同じ周波数を有し、トルクリップル成分を打ち消すためのq軸の振動電圧指令値ΔVqocを算出する。振動電圧指令値算出部37は、巻線を流れる電流情報及び磁極位置θに基づいてトルクリップル成分の逆位相を算出し、q軸の振動電圧指令値ΔVqocの周期における、q軸の振動電圧指令値ΔVqocに対する実電流の位相遅れに対応する補正位相αを算出し、q軸の振動電圧指令値ΔVqocの位相を、トルクリップル成分の逆位相を補正位相αだけ進めた位相に設定する。
そこで、振動電圧指令値算出部37は、ロータの出力トルクに重畳するトルクリップル成分と同じ周波数を有し、トルクリップル成分を打ち消すためのq軸の振動電圧指令値ΔVqocを算出する。振動電圧指令値算出部37は、巻線を流れる電流情報及び磁極位置θに基づいてトルクリップル成分の逆位相を算出し、q軸の振動電圧指令値ΔVqocの周期における、q軸の振動電圧指令値ΔVqocに対する実電流の位相遅れに対応する補正位相αを算出し、q軸の振動電圧指令値ΔVqocの位相を、トルクリップル成分の逆位相を補正位相αだけ進めた位相に設定する。
この構成によれば、q軸の電圧指令値Vqoに、トルクリップル成分を打ち消すためのq軸の振動電圧指令値ΔVqocを重畳するので、高回転域でも、電流フィードバック制御のカットオフ周波数の影響によりカットオフされず、巻線電流に打消し電流を重畳させることができ、トルクリップル成分を打ち消すことができる。
また、巻線を流れる電流情報及び磁極位置θに基づいてトルクリップル成分の逆位相が算出されるので、巻線電流に応じて変化する磁極位置θを基準としたトルクリップル成分の位相及びその逆位相を精度良く算出することができる。更に、q軸の振動電圧指令値ΔVqocに対する実電流の位相遅れに対応する補正位相αが算出され、q軸の振動電圧指令値ΔVqocの位相が、トルクリップル成分の逆位相を補正位相αだけ進めた位相に設定される。よって、電圧指令値と巻線電流及びトルクリップル成分との間の位相のズレを補償したq軸の振動電圧指令値ΔVqocが算出され、トルクリップル成分を精度よく打ち消すことができる。
本実施の形態では、振動電圧指令値算出部37は、次式を用いて、q軸の振動電圧指令値ΔVqocを算出する。図5に、本実施の形態に係る振動電圧指令値算出部37のブロック図を示す。

式(9)において、(N・θ-θrp0-π)が、トルクリップル成分の逆位相になり、αが、補正位相になり、(β・Iqrp0)が、振幅になる。
<トルクリップル成分の逆位相の算出>
振動電圧指令値算出部37は、式(9)に示すように、磁極位置θ及び次数Nの乗算値から、磁極位置θ及び次数Nの乗算値に対するトルクリップル成分の位相θrp0を減算すると共にπ(180度)を減算(又は加算)して、トルクリップル成分の逆位相(N・θ-θrp0-π)を算出する。
振動電圧指令値算出部37は、式(9)に示すように、磁極位置θ及び次数Nの乗算値から、磁極位置θ及び次数Nの乗算値に対するトルクリップル成分の位相θrp0を減算すると共にπ(180度)を減算(又は加算)して、トルクリップル成分の逆位相(N・θ-θrp0-π)を算出する。
ここで、振動電圧指令値算出部37は、巻線に流れる電流情報に基づいて、トルクリップル成分の位相θrp0を算出する。本実施の形態では、振動電圧指令値算出部37は、d軸電流Id及びq軸電流Iqとトルクリップル成分の位相θrp0との関係が予め設定された電流位相設定データを参照し、現在のd軸の電流指令値Ido及びq軸の電流指令値Iqoに対応するトルクリップル成分の位相θrp0を算出する。d軸の電流指令値Ido及びq軸の電流指令値Iqoの代わりに、d軸の電流検出値Idr及びq軸の電流検出値Iqrが用いられてもよい。
電流位相設定データは、マップデータ又は近似関数等とされる。上述したように、d軸電流Id及びq軸電流Iqの各動作点におけるトルクリップル成分ΔTの波形を、電磁界解析又は実測により取得し、取得したデータに基づいて、電流位相設定データが予め設定される。
<補正位相αの算出>
本実施の形態では、振動電圧指令値算出部37は、式(8)の第3式の理論進み位相αrの算出式と同様の次式を用い、磁極位置の回転周波数に対するトルクリップル成分の周波数の次数N、磁極位置の電気角での回転角速度ω、交流回転電機のインダクタンスL、巻線の抵抗値Rに基づいて、補正位相αを算出するように構成されている。

本実施の形態では、振動電圧指令値算出部37は、式(8)の第3式の理論進み位相αrの算出式と同様の次式を用い、磁極位置の回転周波数に対するトルクリップル成分の周波数の次数N、磁極位置の電気角での回転角速度ω、交流回転電機のインダクタンスL、巻線の抵抗値Rに基づいて、補正位相αを算出するように構成されている。
次数Nは、自然数の固定値に設定され、例えば、6に設定される(N=6)。巻線の抵抗値Rは、固定値に設定されてもよいし、巻線温度等に応じて変化されてもよい。
本実施の形態では、インダクタンスLは、q軸インダクタンスLqとされている。q軸インダクタンスLqは、固定値とされてもよいし、後述するように、電流情報等に応じて変化されてもよい。
或いは、振動電圧指令値算出部37は、回転角速度ω及びインダクタンスL(本例では、q軸インダクタンスLq)と補正位相αとの関係が予め設定された補正位相設定データを参照し、現在の回転角速度ω及び現在のインダクタンスLに対応する補正位相αを算出してもよい。或いは、インダクタンスLの変化を考慮せずに、振動電圧指令値算出部37は、回転角速度ωと補正位相αとの関係が予め設定された補正位相設定データを参照し、現在の回転角速度ωに対応する補正位相αを算出してもよい。補正位相設定データは、式(10)、又は実験データに基づいて予め設定される。補正位相設定データは、マップデータ又は近似関数等とされる。
いずれにしても、振動電圧指令値算出部37は、図4に示すように、磁極位置の回転角速度ωが低下するに従って、q軸の振動電圧指令値の周期における補正位相αを、90度から0度までの範囲内で低下させる。
<電流に応じたインダクタンスLの設定>
振動電圧指令値算出部37は、d軸電流及びq軸電流とq軸インダクタンスLqとの関係が予め設定されたインダクタンス設定データを参照し、現在のd軸及びq軸の電流指令値Ido、Iqo又は現在のd軸及びq軸の電流検出値Idr、Iqrに対応するq軸インダクタンスLqを算出してもよい。
振動電圧指令値算出部37は、d軸電流及びq軸電流とq軸インダクタンスLqとの関係が予め設定されたインダクタンス設定データを参照し、現在のd軸及びq軸の電流指令値Ido、Iqo又は現在のd軸及びq軸の電流検出値Idr、Iqrに対応するq軸インダクタンスLqを算出してもよい。
電磁界解析又は実測により取得したデータに基づいて、インダクタンス設定データが予め設定される。例えば、d軸電流及びq軸電流の各動作点において、q軸電流の変化ΔIqに対する鎖交磁束の変化Δψの傾きΔψ/ΔIqを算出し、傾きΔψ/ΔIqがq軸インダクタンスLqとして設定される。
図6は、あるd軸電流Idの動作点において、q軸電流Iqをスイープした時の、q軸の鎖交磁束ψqとq軸電流Iqとの関係特性の例である。この特性は電磁界解析又は実測により求められる。図6において、Iq=1.35[p.u.]付近の動作点が拡大されている。この動作点において、q軸電流Iqの微小変化ΔIqに対するq軸の鎖交磁束の微小変化Δψqが求められ、傾きΔψq/ΔIqが求められる。そして、傾きΔψq/ΔIqが、その動作点における、q軸インダクタンスLqとして求められる。なお、図6において、q軸の鎖交磁束ψqは、固定値が設定されたψq1により無次元化されている。
図7は、各q軸電流Iqの動作点において求めたq軸インダクタンスLq(傾きΔψq/ΔIq)をプロットした図である。q軸インダクタンスLqは、固定値が設定されたL1により無次元化されている。図6において拡大したIq=1.35[p.u.]におけるq軸インダクタンスLqは、2.5L1である。Iq=0.05[p.u.]におけるq軸インダクタンスLqは、7L1である。Iq=0.55[p.u.]におけるq軸インダクタンスLqは、5L1である。図7の例では、q軸電流Iqが増加するに従って、q軸インダクタンスLqが低下している。これは、q軸の鎖交磁束ψqとq軸電流Iqとの関係特性は、磁気飽和の影響により直線ではなく、傾きが、q軸電流Iqに応じて変化しているためである。特に、q軸電流Iqが大きい領域では、傾きが減少し、q軸インダクタンスLqが減少している。よって、巻線電流に応じて、磁気飽和によりインダクタンスが変動する交流回転電機の場合でも、インダクタンスの設定精度を向上させることができる。
<q軸の振動電圧指令値の振幅の算出>
振動電圧指令値算出部37は、巻線を流れる電流情報に基づいて、トルクリップル成分を打ち消すためのq軸の電流の振幅Iqrp0を算出する。本実施の形態では、振動電圧指令値算出部37は、d軸電流Id及びq軸電流Iqとq軸の電流の振幅Iqrp0との関係が予め設定された電流振幅設定データを参照し、現在のd軸の電流指令値Ido及びq軸の電流指令値Iqoに対応するq軸の電流の振幅Iqrp0を算出する。d軸の電流指令値Ido及びq軸の電流指令値Iqoの代わりに、d軸の電流検出値Idr及びq軸の電流検出値Iqrが用いられてもよい。
振動電圧指令値算出部37は、巻線を流れる電流情報に基づいて、トルクリップル成分を打ち消すためのq軸の電流の振幅Iqrp0を算出する。本実施の形態では、振動電圧指令値算出部37は、d軸電流Id及びq軸電流Iqとq軸の電流の振幅Iqrp0との関係が予め設定された電流振幅設定データを参照し、現在のd軸の電流指令値Ido及びq軸の電流指令値Iqoに対応するq軸の電流の振幅Iqrp0を算出する。d軸の電流指令値Ido及びq軸の電流指令値Iqoの代わりに、d軸の電流検出値Idr及びq軸の電流検出値Iqrが用いられてもよい。
電流振幅設定データは、マップデータ又は近似関数等とされる。上述したように、d軸電流Id及びq軸電流Iqの各動作点におけるトルクリップル成分ΔTの波形を、電磁界解析又は実測により取得し、取得したトルクリップル成分ΔTの振幅Trp0を極対数Pm及び鎖交磁束ψで除算して、q軸の電流の振幅Iqrp0を算出し、算出したq軸の電流の振幅Iqrp0を用いて、電流振幅設定データが予め設定される。
振動電圧指令値算出部37は、式(8)の第2式の理論振幅ゲインβrの算出式と同様の次式を用い、磁極位置の回転周波数に対するトルクリップル成分の周波数の次数N、磁極位置の電気角での回転角速度ω、交流回転電機のインダクタンスL、巻線の抵抗値Rに基づいて、振幅ゲインβを算出する。そして、振動電圧指令値算出部37は、式(9)に示したように、q軸の電流の振幅Iqrp0と振幅ゲインβとの乗算値(β・Iqrp0)をq軸の振動電圧指令値ΔVqocの振幅に設定する。

本実施の形態では、次数N、インダクタンスL、抵抗値Rの値には、上述した式(10)の補正位相αの場合と同様のものが用いられ、インダクタンスLには、q軸インダクタンスLqが用いられる。
或いは、振動電圧指令値算出部37は、回転角速度ω及びインダクタンスL(本例では、q軸インダクタンスLq)と振幅ゲインβとの関係が予め設定された振幅ゲイン設定データを参照し、現在の回転角速度ω及び現在のインダクタンスLに対応する振幅ゲインβを算出してもよい。或いは、インダクタンスLの変化を考慮せずに、振動電圧指令値算出部37は、回転角速度ωと振幅ゲインβとの関係が予め設定された振幅ゲイン設定データを参照し、現在の回転角速度ωに対応する振幅ゲインβを算出してもよい。振幅ゲイン設定データは、式(11)、又は実験データに基づいて予め設定される。補正位相設定データは、マップデータ又は近似関数等とされる。
いずれにしても、振動電圧指令値算出部37は、磁極位置の回転角速度ωが増加するに従って、q軸の振動電圧指令値ΔVqocの振幅を増加させる。また、振動電圧指令値算出部37は、インダクタンスLが増加するに従って、q軸の振動電圧指令値の振幅を増加させる。
1-3-9.電流指令補正値算出部
上述したように、本実施の形態では、トルクリップル成分がトルク定数の変動により生じる場合を想定しており、トルクリップル成分は電流検出値には表れない。そのため、トルクリップル成分を打ち消すための電圧振動成分を巻線電圧に重畳すると、巻線電流検出値が振動する。そして、トルクリップル成分の周波数が、電流フィードバック制御のカットオフ周波数よりも低くなる低回転域では、電流フィードバック制御により巻線電流の振動が抑制され、トルクリップル成分の打消し効果が低下する。そのため、低回転域では、電流指令値にトルクリップル成分を打ち消すための電流振動成分を重畳させて、巻線電流の振動が抑制されないようにする必要がある。
上述したように、本実施の形態では、トルクリップル成分がトルク定数の変動により生じる場合を想定しており、トルクリップル成分は電流検出値には表れない。そのため、トルクリップル成分を打ち消すための電圧振動成分を巻線電圧に重畳すると、巻線電流検出値が振動する。そして、トルクリップル成分の周波数が、電流フィードバック制御のカットオフ周波数よりも低くなる低回転域では、電流フィードバック制御により巻線電流の振動が抑制され、トルクリップル成分の打消し効果が低下する。そのため、低回転域では、電流指令値にトルクリップル成分を打ち消すための電流振動成分を重畳させて、巻線電流の振動が抑制されないようにする必要がある。
そこで、電流指令補正値算出部39は、トルクリップル成分ΔTと同じ周波数を有し、トルクリップル成分の逆位相になる、トルクリップル成分を打ち消すためのq軸の振動電流指令値ΔIqocを算出する。そして、上述したように、q軸の振動電流指令値ΔIqocが、q軸の電流指令値Iqoに重畳される。
本実施の形態では、電流指令補正値算出部39は、次式を用いて、q軸の振動電流指令値ΔIqocを算出する。

式(12)において、(N・θ-θrp0-π)が、トルクリップル成分の逆位相になり、Iqrp0が、振幅になる。
トルクリップル成分の位相θrp0、及びq軸の電流の振幅Iqrp0は、振動電圧指令値算出部37と同様の方法により算出され、本実施の形態では、振動電圧指令値算出部37において算出されたものが用いられる。
電流指令補正値算出部39は、磁極位置の回転角速度ωが、電流フィードバック制御のカットオフ周波数に対応して設定された速度閾値よりも低い場合は、上記のようにq軸の振動電流指令値ΔIqocを算出して、q軸の電流指令値Iqoに重畳させ、回転角速度ωが速度閾値よりも高い場合は、q軸の振動電流指令値ΔIqocを算出せず、q軸の電流指令値Iqoに重畳させないように構成されてもよい。
その逆に、振動電圧指令値算出部37は、磁極位置の回転角速度ωが、電流フィードバック制御のカットオフ周波数に対応して設定された速度閾値よりも高い場合は、q軸の振動電圧指令値ΔVqocを算出して、q軸の電圧指令値Vqoに重畳させ、回転角速度ωが速度閾値よりも低い場合は、q軸の振動電圧指令値ΔVqocを算出せず、q軸の電圧指令値Vqoに重畳させないように構成されてもよい。
なお、電流フィードバック制御のカットオフ周波数付近では、q軸の電流指令値Iqoの重畳、及びq軸の電圧指令値Vqoの重畳の双方が実行されてもよい。
2.実施の形態2
次に、実施の形態2に係る制御装置30について説明する。上記の実施の形態1と同様の構成部分は説明を省略する。本実施の形態に係る交流回転電機1及び制御装置30の基本的な構成及び処理は実施の形態1と同様であるが、振動電圧指令値算出部37における補正位相α及び振幅ゲインβの設定方法が実施の形態1と異なる。図8は、本実施の形態に係る振動電圧指令値算出部のブロック図である。
次に、実施の形態2に係る制御装置30について説明する。上記の実施の形態1と同様の構成部分は説明を省略する。本実施の形態に係る交流回転電機1及び制御装置30の基本的な構成及び処理は実施の形態1と同様であるが、振動電圧指令値算出部37における補正位相α及び振幅ゲインβの設定方法が実施の形態1と異なる。図8は、本実施の形態に係る振動電圧指令値算出部のブロック図である。
<補正位相αの設定>
図4に示したように、回転角速度ωが増加するに従って、理論進み位相αrはπ/2(90度)に近づく。また、トルクリップル成分の周波数が、電流フィードバック制御のカットオフ周波数よりも高くなる高回転域では、電流指令値に打消し電流振動成分を重畳させても、巻線電流に打消し電流振動成分を重畳させることができず、電圧指令値に打消し電圧振動成分を重畳させる必要がある。そこで、本実施の形態では、回転角速度ωが高い場合を重要視して構成されている。
図4に示したように、回転角速度ωが増加するに従って、理論進み位相αrはπ/2(90度)に近づく。また、トルクリップル成分の周波数が、電流フィードバック制御のカットオフ周波数よりも高くなる高回転域では、電流指令値に打消し電流振動成分を重畳させても、巻線電流に打消し電流振動成分を重畳させることができず、電圧指令値に打消し電圧振動成分を重畳させる必要がある。そこで、本実施の形態では、回転角速度ωが高い場合を重要視して構成されている。
そこで、本実施の形態では、振動電圧指令値算出部37は、q軸の振動電圧指令値ΔVqocの周期における補正位相αを、π/2(90度)に設定している(α=π/2)。
この構成によれば、電圧指令値に打消し電圧振動成分を重畳させる必要がある高回転域において、理論進み位相αrが90度に近づくこと利用し、制御系を簡略化することができる。また、図4に示すように、回転角速度ωが0から増加すると、理論進み位相αrが急速に90度に近づく。よって、回転角速度ωがある程度増加すると、補正位相αをπ/2(90度)に設定しても、補正誤差を低くできる。
なお、振動電圧指令値算出部37は、磁極位置の回転角速度ωが開始閾値よりも高い場合は、上記のようにq軸の振動電圧指令値ΔVqocを算出して、q軸の電圧指令値Vqoに重畳させ、回転角速度ωが開始閾値よりも低い場合は、q軸の振動電圧指令値ΔVqocを算出せず、q軸の電圧指令値Vqoに重畳させないように構成されてもよい。開始閾値は、理論進み位相αrとπ/2(90度)との差が、許容差(例えば、10度)になる回転角速度ωに設定される。
<q軸の振動電圧指令値の振幅の算出>
また、式(8)の第2式に示したように、回転角速度ωが増加するに従って、R2に対して(N・ω・L)2が大きくなり、理論振幅ゲインβrは、N・ω・Lに近づく。
また、式(8)の第2式に示したように、回転角速度ωが増加するに従って、R2に対して(N・ω・L)2が大きくなり、理論振幅ゲインβrは、N・ω・Lに近づく。
そこで、本実施の形態では、振動電圧指令値算出部37は、次式に示すように、磁極位置の回転周波数に対するトルクリップル成分の周波数の次数N、磁極位置の電気角での回転角速度ω、及び交流回転電機のインダクタンスLの乗算値を、振幅ゲインβとして算出する。インダクタンスLは、q軸インダクタンスLqとされ、実施の形態1と同様に、電流情報等に応じて変化されてもよい。

なお、振動電圧指令値算出部37は、実施の形態1と同様に、巻線を流れる電流情報に基づいて、トルクリップル成分を打ち消すためのq軸の電流の振幅Iqrp0を算出する。そして、振動電圧指令値算出部37は、式(9)に示したように、q軸の電流の振幅Iqrp0と振幅ゲインβとの乗算値をq軸の振動電圧指令値ΔVqocの振幅に設定する。
この構成によれば、電圧指令値に打消し電圧振動成分を重畳させる必要がある高回転域において、振幅ゲインβがN・ω・Lに近づくこと利用し、制御系を簡略化することができる。
よって、振動電圧指令値算出部37は、磁極位置の回転角速度ωに比例して、q軸の振動電圧指令値ΔVqocの振幅を増加させる。また、振動電圧指令値算出部37は、インダクタンスLに比例して、q軸の振動電圧指令値の振幅を増加させる。
実施の形態1と同様に、振動電圧指令値算出部37は、振幅ゲイン設定データを参照し、振幅ゲインβを算出してもよい。
或いは、振動電圧指令値算出部37は、磁極位置の回転角速度ωが、電流フィードバック制御のカットオフ周波数に対応して設定された速度閾値よりも高い場合は、上記のようにq軸の振動電圧指令値ΔVqocを算出して、q軸の電圧指令値Vqoに重畳させ、回転角速度ωが速度閾値よりも低い場合は、q軸の振動電圧指令値ΔVqocを算出せず、q軸の電圧指令値Vqoに重畳させないように構成されてもよい。
このように構成すれば、理論進み位相αrが90度に近づき、理論振幅ゲインβrがN・ω・Lに近づく高回転域で、q軸の振動電圧指令値ΔVqocの重畳を行うので、補正位相αをπ/2(90度)に簡略設定し、振幅ゲインβをN・ω・Lに簡略設定しても、補正誤差の発生を抑制し、トルクリップル成分を打ち消すことができる。
3.実施の形態3
次に、実施の形態3に係る制御装置30について説明する。上記の実施の形態1と同様の構成部分は説明を省略する。本実施の形態に係る交流回転電機1及び制御装置30の基本的な構成及び処理は実施の形態1又は2と同様であるが、振動電圧指令値算出部37におけるq軸の振動電圧指令値ΔVqocの振動範囲が実施の形態1又は2と異なる。
次に、実施の形態3に係る制御装置30について説明する。上記の実施の形態1と同様の構成部分は説明を省略する。本実施の形態に係る交流回転電機1及び制御装置30の基本的な構成及び処理は実施の形態1又は2と同様であるが、振動電圧指令値算出部37におけるq軸の振動電圧指令値ΔVqocの振動範囲が実施の形態1又は2と異なる。
電源電圧VDCにより、巻線への印加電圧の上限制限値が決まっており、d軸の電圧指令値及びq軸の電圧指令値の上限制限値も決まっている。そのため、図9の比較例に係るタイムチャートに示すように、q軸の振動電圧指令値ΔVqocの重畳後のq軸の電圧指令値Vqoが上限制限値Vlmtを超えないように、q軸の振動電圧指令値ΔVqocの山部分が、カットされてしまう。カットされた山部分だけ、トルクリップル成分の打消しができず、打消しが不十分になる。
そこで、本実施の形態では、振動電圧指令値算出部37は、q軸の振動電圧指令値ΔVqocの重畳により、重畳後のq軸の電圧指令値Vqoが上限制限値Vlmtを超えないように、q軸の振動電圧指令値ΔVqocをオフセット的に減少させる。
この構成によれば、q軸の振動電圧指令値ΔVqocの山部分が、上限制限値Vlmtによりカットされないようにでき、q軸の電圧指令値の上限制限によりトルクリップル成分の打消し効果が損なわれないようにできる。
本実施の形態では、振動電圧指令値算出部37は、次式に示すように、q軸の基本電圧指令値Vqobにq軸の振動電圧指令値の振幅(β・Iqrp0)を加算した補正前最大値Vqmaxが、上限制限値Vlmtを超える場合は、補正前最大値Vqmaxから上限制限値Vlmtを減算したオフセット値ΔVoffだけ、q軸の振動電圧指令値ΔVqocを減少させて、オフセット後のq軸の振動電圧指令値ΔVqoc_offを算出し、オフセット後のq軸の振動電圧指令値ΔVqoc_offをq軸の基本電圧指令値Vqobに重畳させてq軸の電圧指令値Vqoを算出する。一方、振動電圧指令値算出部37は、補正前最大値Vqmaxが上限制限値Vlmtを超えない場合は、オフセット補正を行わず、q軸の振動電圧指令値ΔVqocをそのままq軸の基本電圧指令値Vqobに重畳させてq軸の電圧指令値Vqoを算出する。
この構成によれば、図10のタイムチャートに示すように、q軸の振動電圧指令値ΔVqocの山部分が上限制限値Vlmtによりカットされない最小限のオフセット値ΔVoffを設定することができ、q軸の基本電圧指令値Vqobからのq軸の電圧指令値Vqoの平均値の変動を最小限に抑制することができる。よって、トルクリップル成分の打消しのために、出力トルクの平均値が変動することを最小限に抑制できる。
或いは、振動電圧指令値算出部37は、q軸の振動電圧指令値の振幅(β・Iqrp0)に-2を乗算した値から0までの間を振動するq軸の振動電圧指令値ΔVqocを算出するように構成されてもよい。
この場合は、振動電圧指令値算出部37は、次式に示すように、q軸の振動電圧指令値ΔVqocから、q軸の振動電圧指令値の振幅(β・Iqrp0)を減算して、オフセット後のq軸の振動電圧指令値ΔVqoc_offを算出し、オフセット後のq軸の振動電圧指令値ΔVqoc_offをq軸の基本電圧指令値Vqobに重畳させてq軸の電圧指令値Vqoを算出する。

この場合は、図11のタイムチャートに示すように、常時一律オフセットさせることにより、演算負荷を低減しつつ、q軸の振動電圧指令値ΔVqocの山部分が上限制限値Vlmtによりカットされないようでき、トルクリップル成分を打ち消すことができる。
4.実施の形態4
次に、実施の形態4に係る制御装置30について説明する。上記の実施の形態1と同様の構成部分は説明を省略する。本実施の形態に係る交流回転電機1及び制御装置30の基本的な構成及び処理は実施の形態1、2、又は3と同様であるが、交流回転電機1及び制御装置30が電動パワーステアリング装置60に組み込まれている点が、実施の形態1、2、又は3と異なる。
次に、実施の形態4に係る制御装置30について説明する。上記の実施の形態1と同様の構成部分は説明を省略する。本実施の形態に係る交流回転電機1及び制御装置30の基本的な構成及び処理は実施の形態1、2、又は3と同様であるが、交流回転電機1及び制御装置30が電動パワーステアリング装置60に組み込まれている点が、実施の形態1、2、又は3と異なる。
本実施の形態では、図12に示すように、交流回転電機1が、車輪62の操舵装置63の駆動力源となっている。交流回転電機1及び制御装置30は、電動パワーステアリング装置60を構成する。交流回転電機1のロータの回転軸は、駆動力伝達機構61を介して車輪62の操舵装置63に連結される。例えば、電動パワーステアリング装置60は、運転者が左右に回転するハンドル64と、ハンドル64に連結されて、ハンドル64による操舵トルクを車輪62の操舵装置63に伝達するシャフト65と、シャフト65に取り付けられ、ハンドル64による操舵トルクTsを検出するトルクセンサ66と、交流回転電機1の回転軸をシャフト65に連結するウォームギヤ機構等の駆動力伝達機構61と、を備えている。
トルクセンサ66の出力信号は、制御装置30(入力回路92)に入力され、制御装置30は、トルクセンサ66の出力信号に基づいて、運転者の操舵トルクTsを検出する。そして、電流指令値算出部35は、操舵トルクTsに基づいて、操舵トルクTsを補助するための電流指令値を算出する。例えば、電流指令値算出部35は、次式に示すように、操舵トルクTsに、アシストゲインKaを乗算して、q軸の電流指令値Iqoを算出する。なお、d軸の電流指令値Idoは、0に設定される。アシストゲインKaは、自車両の走行速度等に応じて変化されてもよい。

なお、電流指令値算出部35は、操舵トルクTsに基づいて算出した目標トルク等に基づいて、最大トルク電流制御、弱め磁束制御等を用いて、d軸及びq軸の電流指令値Ido、Iqoを算出してもよい。
電動パワーステアリング装置60に用いられる交流回転電機1においても、次数N(例えば、6次)のトルクリップル成分が重畳する。トルクリップル成分により、(1)ハンドルの操舵感が悪化し、(2)トルクリップル成分の周波数が、機械共振周波数に一致した時に騒音が増大する。これら(1)及び(2)を抑制するために、実施の形態1から3のように、巻線電流に打消し電流振動成分を重畳させる必要がある。
(1)に関しては、ハンドルに伝わるトルクリップル成分の周波数帯域は、200Hz程度以下の低周波数帯域なので、q軸の振動電流指令値ΔIqocをq軸の電流指令値Iqoに重畳させることで、電流フィードバック制御により巻線電流に打消し電流振動成分を重畳させることができ、ハンドルの操舵感を改善することができる。
(2)に関しては、機械共振周波数が高周波数帯域(例えば、300Hzから4000Hz程度)となるため、打消し電流振動成分の周波数が、300Hzから4000Hzの高周波となる。そのため、電流フィードバック制御のカットオフ周波数よりも高くなる周波数も含まれるため、q軸の振動電流指令値ΔIqocをq軸の電流指令値Iqoに重畳させるだけでは不十分で、q軸の振動電圧指令値ΔVqocをq軸の電圧指令値Vqoに重畳させることで、巻線電流に打消し電流振動成分を重畳させることができ、共振により騒音が増大することを抑制できる。よって、電動パワーステアリング装置60に、トルク定数が変動する廉価な交流回転電機を用いることができる。
〔その他の実施の形態〕
最後に、本願のその他の実施の形態について説明する。なお、以下に説明する各実施の形態の構成は、それぞれ単独で適用されるものに限られず、矛盾が生じない限り、他の実施の形態の構成と組み合わせて適用することも可能である。
最後に、本願のその他の実施の形態について説明する。なお、以下に説明する各実施の形態の構成は、それぞれ単独で適用されるものに限られず、矛盾が生じない限り、他の実施の形態の構成と組み合わせて適用することも可能である。
(1)上記の各実施の形態では、3相の巻線がステータに設けられている場合を例として説明した。しかし、巻線の相数は、任意の相数であってもよく、複数組の巻線が設けられ、各組の巻線について、各実施の形態のようなモータ制御が行われてもよい。
(2)上記の各実施の形態においては、交流回転電機1は、永久磁石型の同期交流回転電機とされている場合を例として説明した。しかし、本願の実施の形態はこれに限定されない。すなわち、交流回転電機1は、電磁石型の同期交流回転電機、誘導回転電機などの各種の回転電機とされてもよい。
(3)上記の各実施の形態においては、電流検出値にトルクリップル成分が表れない場合において、q軸の電圧指令値Vqoにq軸の振動電圧指令値ΔVqocを重畳させ、q軸の電流指令値Iqoにq軸の振動電流指令値ΔIqocを重畳させる場合を例として説明した。しかし、本願の実施の形態はこれに限定されない。すなわち、電流検出値にトルクリップル成分が表れる場合において、q軸の電圧指令値Vqoにq軸の振動電圧指令値ΔVqocを重畳させてもよい。この場合は、電流フィードバック制御により、打消し電流振動成分が打ち消されないので、q軸の電流指令値Iqoにq軸の振動電流指令値ΔIqocを重畳させなくてもよい。
(4)上記の各実施の形態においては、式(6)の打消しd軸電圧ΔVdcの項(-ω・Lq・ΔIq)を無視する場合を例に説明した。しかし、本願の実施の形態はこれに限定されない。すなわち、振動電圧指令値算出部37は、次式を用いて、d軸の振動電圧指令値ΔVdocを算出し、d軸の基本電圧指令値Vdobに重畳させてもよい。

式(17)において、(N・θ-θrp0)が、トルクリップル成分の位相になり、(ω・L・Iqrp0)が、振幅になる。インダクタンスLには、q軸インダクタンスLqが用いられる。磁極位置θのN倍値に対するトルクリップル成分の位相θrp0、q軸の電流の振幅Iqrp0、及びq軸インダクタンスLqは、上記の各実施の形態と同様の方法により算出される。
(5)上記の各実施の形態においては、インダクタンスLとして、q軸インダクタンスLqが用いられる場合を例に説明した。しかし、インダクタンスLに、q軸インダクタンスLq及びd軸インダクタンスLdの合計値が用いられてもよい。
(6)上記の各実施の形態においては、次数Nが、6である場合を例として説明した。しかし、次数Nは、6以外の任意の自然数であってもよい。また、複数の次数のトルクリップル成分が重畳している場合は、各次数のトルクリップル成分に対するq軸の振動電圧指令値ΔVqoc及びq軸の振動電流指令値ΔIqocが算出され、複数の次数のq軸の振動電圧指令値ΔVqoc及びq軸の振動電流指令値ΔIqocの合計値が、q軸の電圧指令値Vqo及びq軸の電流指令値Iqoに重畳されてもよい。
(7)上記の各実施の形態においては、余弦関数(cos)、逆正接関数(arctan)等を用いた式が用いられる場合を例として説明した。しかし、三角関数の公式を用いて、任意の等価な式に変換されたものが用いられてもよい。
(8)上記の実施の形態4においては、交流回転電機1が、車輪62の操舵装置63の駆動力源となり、交流回転電機1及び制御装置30は、電動パワーステアリング装置60に組み込まれている場合を例に説明した。しかし、本願の実施の形態はこれに限定されない。交流回転電機1は、操舵装置63以外の装置(例えば、車輪)の駆動力源となってもよく、交流回転電機1及び制御装置30は、電動パワーステアリング装置60以外の装置(例えば、車両の動力装置)に組み込まれていてもよい。
本願は、様々な例示的な実施の形態及び実施例が記載されているが、1つ、または複数の実施の形態に記載された様々な特徴、態様、及び機能は特定の実施の形態の適用に限られるのではなく、単独で、または様々な組み合わせで実施の形態に適用可能である。従って、例示されていない無数の変形例が、本願明細書に開示される技術の範囲内において想定される。例えば、少なくとも1つの構成要素を変形する場合、追加する場合または省略する場合、さらには、少なくとも1つの構成要素を抽出し、他の実施の形態の構成要素と組み合わせる場合が含まれるものとする。
1 交流回転電機、20 インバータ、31 磁極位置検出部、32 電流検出部、33 dq軸電流変換部、34 電源電圧検出部、35 電流指令値算出部、36 基本電圧指令値算出部、37 振動電圧指令値算出部、38 スイッチング制御部、60 電動パワーステアリング装置、Ido d軸の電流指令値、Idr d軸の電流検出値、Iqo q軸の電流指令値、Iqr q軸の電流検出値、Iqrp0 q軸の電流の振幅、ΔIqoc q軸の振動電流指令値、Vdob d軸の基本電圧指令値、Vqob q軸の基本電圧指令値、Vqo q軸の電圧指令値、ΔVqoc q軸の振動電圧指令値、Vlmt 上限制限値、ΔT トルクリップル成分、α 補正位相、β 振幅ゲイン、θ 磁極位置、θrp0 トルクリップル成分の位相、ω 回転角速度
Claims (13)
- 巻線を設けたステータとロータとを有する交流回転電機を、インバータを介して制御する交流回転電機の制御装置であって、
前記ロータの磁極位置を検出する磁極位置検出部と、
検出した前記磁極位置の方向に定めたd軸及び前記d軸より電気角で90°進んだ方向に定めたq軸からなるdq軸の回転座標系上において、前記d軸の基本電圧指令値及び前記q軸の基本電圧指令値を算出する基本電圧指令値算出部と、
前記ロータの出力トルクに重畳するトルクリップル成分と同じ周波数を有し、前記トルクリップル成分を打ち消すための前記q軸の振動電圧指令値を算出する振動電圧指令値算出部と、
前記d軸の基本電圧指令値、及び前記q軸の基本電圧指令値に前記q軸の振動電圧指令値を重畳した前記q軸の電圧指令値に基づいて、前記インバータが有する複数のスイッチング素子をオンオフ制御するスイッチング制御部と、を備え、
前記振動電圧指令値算出部は、前記巻線を流れる電流情報及び前記磁極位置に基づいて前記トルクリップル成分の逆位相を算出し、前記q軸の振動電圧指令値の周期における、前記q軸の振動電圧指令値に対する実電流の位相遅れに対応する補正位相を算出し、前記q軸の振動電圧指令値の位相を、前記トルクリップル成分の前記逆位相を前記補正位相だけ進めた位相に設定する交流回転電機の制御装置。 - 前記振動電圧指令値算出部は、前記q軸の振動電圧指令値の周期における前記補正位相を、90度に設定する請求項1に記載の交流回転電機の制御装置。
- 前記振動電圧指令値算出部は、前記磁極位置の回転角速度が低下するに従って、前記q軸の振動電圧指令値の周期における前記補正位相を、90度から0度までの範囲内で低下させる請求項1に記載の交流回転電機の制御装置。
- 前記振動電圧指令値算出部は、前記補正位相をαとし、前記磁極位置の回転周波数に対する前記トルクリップル成分の周波数の次数をNとし、前記磁極位置の電気角での回転角速度をωとし、前記交流回転電機のインダクタンスをLとし、前記巻線の抵抗値をRとして、
α=arctan(N×ω×L/R)
の算出式を用いて前記補正位相を算出する請求項1又は3に記載の交流回転電機の制御装置。 - 前記振動電圧指令値算出部は、前記磁極位置の電気角での回転角速度が増加するに従って、前記q軸の振動電圧指令値の振幅を増加させる請求項1から4のいずれか一項に記載の交流回転電機の制御装置。
- 前記振動電圧指令値算出部は、前記巻線を流れる電流情報に基づいて前記交流回転電機のインダクタンスを算出し、前記インダクタンスが増加するに従って、前記q軸の振動電圧指令値の振幅を増加させる請求項1から5のいずれか一項に記載の交流回転電機の制御装置。
- 前記振動電圧指令値算出部は、前記巻線を流れる電流情報に基づいて、前記トルクリップル成分を打ち消すための前記q軸の電流の振幅を算出し、
振幅ゲインをβとし、前記磁極位置の回転周波数に対する前記トルクリップル成分の周波数の次数をNとし、前記磁極位置の電気角での回転角速度をωとし、前記交流回転電機のインダクタンスをLとし、前記巻線の抵抗値をRとして、
β=√(R2+(N×ω×L)2)
の算出式を用いて前記振幅ゲインを算出し、
前記q軸の電流の振幅と前記振幅ゲインとの乗算値を前記q軸の振動電圧指令値の振幅に設定する請求項1から6のいずれか一項に記載の交流回転電機の制御装置。 - 前記振動電圧指令値算出部は、前記巻線を流れる電流情報に基づいて、前記トルクリップル成分を打ち消すための前記q軸の電流の振幅を算出し、
前記q軸の電流の振幅に、前記磁極位置の回転周波数に対する前記トルクリップル成分の周波数の次数、前記磁極位置の電気角での回転角速度、及び前記交流回転電機のインダクタンスを乗算した値を、前記q軸の振動電圧指令値の振幅に設定する請求項1から6のいずれか一項に記載の交流回転電機の制御装置。 - 前記振動電圧指令値算出部は、前記巻線の電流と前記インダクタンスとの関係が予め設定されたインダクタンス設定データを参照し、現在の前記巻線の電流に対応する前記インダクタンスを算出する請求項6から8のいずれか一項に記載の交流回転電機の制御装置。
- 前記振動電圧指令値算出部は、前記q軸の振動電圧指令値の重畳により、重畳後の前記q軸の電圧指令値が上限制限値を超えないように、前記q軸の振動電圧指令値をオフセット的に減少させる請求項1から9のいずれか一項に記載の交流回転電機の制御装置。
- 前記振動電圧指令値算出部は、前記q軸の振動電圧指令値の振幅に-2を乗算した値から0までの間を振動する前記q軸の振動電圧指令値を算出する請求項1から9のいずれか一項に記載の交流回転電機の制御装置。
- 前記d軸の電流指令値と前記q軸の電流指令値とを算出する電流指令値算出部と、
前記トルクリップル成分と同じ周波数を有し、前記トルクリップル成分の前記逆位相になる、前記トルクリップル成分を打ち消すための前記q軸の振動電流指令値を算出する電流指令補正値算出部と、
前記巻線に流れる電流を検出する電流検出部と、
前記巻線の電流検出値及び前記磁極位置に基づいて、前記d軸の電流検出値及び前記q軸の電流検出値を算出するdq軸電流変換部と、を更に備え、
前記基本電圧指令値算出部は、前記d軸の電流検出値が前記d軸の電流指令値に近づき、前記q軸の電流検出値が、前記q軸の振動電流指令値が重畳された前記q軸の電流指令値に近づくように、前記d軸の基本電圧指令値及び前記q軸の基本電圧指令値を変化させる請求項1から11のいずれか一項に記載の交流回転電機の制御装置。 - 請求項1から12のいずれか一項に記載の交流回転電機の制御装置と、
車輪の操舵装置の駆動力源となる前記交流回転電機と、を備えた電動パワーステアリング装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201980098117.9A CN114208020B (zh) | 2019-07-30 | 2019-07-30 | 交流旋转电机的控制装置及电动助力转向装置 |
| JP2021536499A JP7090812B2 (ja) | 2019-07-30 | 2019-07-30 | 交流回転電機の制御装置及び電動パワーステアリング装置 |
| PCT/JP2019/029746 WO2021019662A1 (ja) | 2019-07-30 | 2019-07-30 | 交流回転電機の制御装置及び電動パワーステアリング装置 |
| US17/613,159 US11784595B2 (en) | 2019-07-30 | 2019-07-30 | Controller for AC rotary electric machine and electric power steering apparatus |
| EP19939074.1A EP4007159A4 (en) | 2019-07-30 | 2019-07-30 | CONTROL DEVICE FOR AN ELECTRICAL AC MACHINE AND ELECTRIC POWER STEERING |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/029746 WO2021019662A1 (ja) | 2019-07-30 | 2019-07-30 | 交流回転電機の制御装置及び電動パワーステアリング装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021019662A1 true WO2021019662A1 (ja) | 2021-02-04 |
Family
ID=74228382
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/029746 WO2021019662A1 (ja) | 2019-07-30 | 2019-07-30 | 交流回転電機の制御装置及び電動パワーステアリング装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11784595B2 (ja) |
| EP (1) | EP4007159A4 (ja) |
| JP (1) | JP7090812B2 (ja) |
| CN (1) | CN114208020B (ja) |
| WO (1) | WO2021019662A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023195273A1 (ja) * | 2022-04-06 | 2023-10-12 | 日立Astemo株式会社 | モータ制御装置並びに電気車 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114600364A (zh) * | 2020-10-05 | 2022-06-07 | 东芝三菱电机产业系统株式会社 | 电力变换装置的控制装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007274779A (ja) * | 2006-03-30 | 2007-10-18 | Aisin Aw Co Ltd | 電動駆動制御装置及び電動駆動制御方法 |
| JP2011030349A (ja) * | 2009-07-24 | 2011-02-10 | Nissan Motor Co Ltd | 電動機の制御装置 |
| JP2011088491A (ja) * | 2009-10-20 | 2011-05-06 | Jtekt Corp | 電動パワーステアリング装置 |
| JP2014121182A (ja) * | 2012-12-17 | 2014-06-30 | Mitsuba Corp | ブラシレスモータ制御方法及びブラシレスモータ制御装置並びに電動パワーステアリング装置 |
| JP2018183016A (ja) * | 2017-04-21 | 2018-11-15 | 株式会社ジェイテクト | モータ制御装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6008617A (en) * | 1996-05-20 | 1999-12-28 | Hitachi, Ltd. | Motor control device for high frequency AC driven motor |
| JP2011211815A (ja) * | 2010-03-30 | 2011-10-20 | Kokusan Denki Co Ltd | 永久磁石モータの制御装置 |
| WO2011135696A1 (ja) * | 2010-04-28 | 2011-11-03 | 株式会社 日立製作所 | 電力変換装置 |
| WO2012133220A1 (ja) * | 2011-03-25 | 2012-10-04 | アイシン・エィ・ダブリュ株式会社 | 制御装置 |
| JP5626592B2 (ja) * | 2011-08-08 | 2014-11-19 | アイシン・エィ・ダブリュ株式会社 | 制御装置 |
| EP2899876B1 (en) * | 2012-09-21 | 2017-03-08 | Nissan Motor Co., Ltd. | Inverter control device and inverter control method |
| CN104981973B (zh) * | 2013-02-12 | 2018-02-16 | 三菱电机株式会社 | 电动机驱动装置 |
| JP2016111788A (ja) | 2014-12-04 | 2016-06-20 | 株式会社ジェイテクト | 回転電機の制御装置 |
| JP6436005B2 (ja) | 2015-07-02 | 2018-12-12 | 株式会社デンソー | 回転電機制御装置 |
| JP6343037B1 (ja) * | 2017-01-11 | 2018-06-13 | 日立ジョンソンコントロールズ空調株式会社 | モータ駆動装置および冷凍機器 |
-
2019
- 2019-07-30 WO PCT/JP2019/029746 patent/WO2021019662A1/ja unknown
- 2019-07-30 JP JP2021536499A patent/JP7090812B2/ja active Active
- 2019-07-30 CN CN201980098117.9A patent/CN114208020B/zh active Active
- 2019-07-30 EP EP19939074.1A patent/EP4007159A4/en active Pending
- 2019-07-30 US US17/613,159 patent/US11784595B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007274779A (ja) * | 2006-03-30 | 2007-10-18 | Aisin Aw Co Ltd | 電動駆動制御装置及び電動駆動制御方法 |
| JP2011030349A (ja) * | 2009-07-24 | 2011-02-10 | Nissan Motor Co Ltd | 電動機の制御装置 |
| JP2011088491A (ja) * | 2009-10-20 | 2011-05-06 | Jtekt Corp | 電動パワーステアリング装置 |
| JP2014121182A (ja) * | 2012-12-17 | 2014-06-30 | Mitsuba Corp | ブラシレスモータ制御方法及びブラシレスモータ制御装置並びに電動パワーステアリング装置 |
| JP2018183016A (ja) * | 2017-04-21 | 2018-11-15 | 株式会社ジェイテクト | モータ制御装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023195273A1 (ja) * | 2022-04-06 | 2023-10-12 | 日立Astemo株式会社 | モータ制御装置並びに電気車 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220224266A1 (en) | 2022-07-14 |
| EP4007159A1 (en) | 2022-06-01 |
| CN114208020A (zh) | 2022-03-18 |
| EP4007159A4 (en) | 2022-08-24 |
| US11784595B2 (en) | 2023-10-10 |
| JP7090812B2 (ja) | 2022-06-24 |
| CN114208020B (zh) | 2024-05-31 |
| JPWO2021019662A1 (ja) | 2021-10-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9214886B2 (en) | Control apparatus for three-phase rotary machine | |
| US9112436B2 (en) | System for controlling controlled variable of rotary machine | |
| US9979340B2 (en) | Apparatus for controlling three phase rotary electric machine reducing peak value of phase current | |
| WO2014097918A1 (ja) | ブラシレスモータ制御方法及びブラシレスモータ制御装置並びに電動パワーステアリング装置 | |
| KR20060120015A (ko) | 전동 파워 스티어링 장치 | |
| JP6390489B2 (ja) | インバータの制御装置 | |
| JP6173520B1 (ja) | 回転電機の制御装置 | |
| JP2016111788A (ja) | 回転電機の制御装置 | |
| JP4103430B2 (ja) | 電動パワーステアリング装置 | |
| WO2020213178A1 (ja) | 電動機の制御装置 | |
| JP7090812B2 (ja) | 交流回転電機の制御装置及び電動パワーステアリング装置 | |
| WO2019092777A1 (ja) | 電動機制御装置及び電動パワーステアリング装置 | |
| JP6287715B2 (ja) | 回転機の制御装置 | |
| JP6400231B2 (ja) | 回転電機の制御装置 | |
| JP6818929B1 (ja) | 回転電機の制御装置及び電動パワーステアリング装置 | |
| JP6380251B2 (ja) | 回転電機の制御装置 | |
| JP6361569B2 (ja) | 回転電機の制御装置 | |
| JP2011087359A (ja) | モータ制御装置 | |
| JP7385776B2 (ja) | 電動機の制御装置 | |
| JP2019106815A (ja) | モータ制御装置 | |
| WO2022113317A1 (ja) | 回転電機の制御装置及び電動パワーステアリング装置 | |
| JP6163375B2 (ja) | ブラシレスモータ制御方法及びブラシレスモータ制御装置 | |
| JP6945673B2 (ja) | 交流回転電機の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19939074 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021536499 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2019939074 Country of ref document: EP Effective date: 20220228 |