WO2020240660A1 - 運転支援装置および運転支援方法 - Google Patents
運転支援装置および運転支援方法 Download PDFInfo
- Publication number
- WO2020240660A1 WO2020240660A1 PCT/JP2019/020895 JP2019020895W WO2020240660A1 WO 2020240660 A1 WO2020240660 A1 WO 2020240660A1 JP 2019020895 W JP2019020895 W JP 2019020895W WO 2020240660 A1 WO2020240660 A1 WO 2020240660A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle
- information
- intersection
- stuck
- driving support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R16/00—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for
- B60R16/02—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING SYSTEMS, e.g. PERSONAL CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B21/00—Alarms responsive to a single specified undesired or abnormal condition and not otherwise provided for
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/04—Detecting movement of traffic to be counted or controlled using optical or ultrasonic detectors
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
Definitions
- the present invention relates to a driving support device and a driving support method that provide driving support to prevent a vehicle from getting stuck in an intersection.
- Patent Document 1 Conventionally, a technique for preventing a vehicle from getting stuck in an intersection based on an image taken by a camera provided at the intersection has been disclosed (see, for example, Patent Document 1).
- Patent Document 1 when a vehicle passes through an intersection, it is determined whether there is an empty space on the road to which the vehicle passes, and if there is no empty space, it is determined that the vehicle is stuck in the intersection. ing.
- Patent Document 1 does not determine whether or not there is an empty space for each lane on the road passing through the intersection. Therefore, in Patent Document 1, when the road through which the intersection passes is composed of a plurality of lanes, even if there is an empty space in one lane of the plurality of lanes, there is no empty space in the other lane. In that case, it may be determined that there is no empty space on the entire road to be passed, and as a result, the vehicle may be determined to be stuck in the intersection. As described above, in Patent Document 1, it cannot be said that it is accurately determined whether or not the vehicle is stuck in the intersection.
- the present invention has been made to solve such a problem, and provides a driving support device and a driving support method capable of accurately determining whether or not a vehicle is stuck in an intersection. The purpose.
- the driving support device includes another vehicle information acquisition unit that acquires information on other vehicles existing around the intersection, and a road connected to the intersection.
- the map information acquisition unit that acquires map information including lane information and the own vehicle pass through the front intersection, which is an intersection existing in front of the own vehicle, the lane of the passing road, which is the road to which the front intersection passes,
- the stuck judgment unit that determines whether or not the own vehicle is stuck in the front intersection, and the stuck judgment unit that determines that the own vehicle is stuck. It is provided with a notification control unit that controls to notify the driver of a predetermined driving support information.
- the driving support device when the own vehicle passes through the front intersection, which is an intersection existing in front of the own vehicle, the driving support device provides lane information of the passing road, which is the passing road of the front intersection, and the passing destination. It is equipped with a stuck judgment unit that determines whether or not the own vehicle is stuck in the front intersection based on other vehicle information for each lane on the road, and when the stuck judgment unit determines that the vehicle is stuck, the driver of the own vehicle is notified. On the other hand, control is performed to notify the predetermined driving support information. Therefore, it is possible to accurately determine whether or not the vehicle is stuck in the intersection.
- Embodiment 1 of this invention It is a block diagram which shows an example of the structure of the operation support device by Embodiment 1 of this invention. It is a block diagram which shows an example of the structure of the operation support device by Embodiment 1 of this invention. It is a flowchart which shows an example of the operation of the driving support apparatus by Embodiment 1 of this invention. It is a figure for demonstrating an example of the operation of the driving support apparatus by Embodiment 1 of this invention. It is a figure for demonstrating an example of the operation of the driving support apparatus according to Embodiment 1 of this invention. It is a flowchart which shows an example of the operation of the driving support apparatus by Embodiment 1 of this invention.
- Embodiment 1 of this invention It is a figure for demonstrating an example of the operation of the driving support apparatus according to Embodiment 1 of this invention. It is a block diagram which shows an example of the structure of the operation support device by Embodiment 2 of this invention. It is a flowchart which shows an example of the operation of the driving support apparatus by Embodiment 2 of this invention. It is a flowchart which shows an example of the operation of the driving support apparatus by Embodiment 2 of this invention. It is a block diagram which shows an example of the structure of the driving support device by Embodiment 3 of this invention. It is a flowchart which shows an example of the operation of the driving support apparatus by Embodiment 3 of this invention.
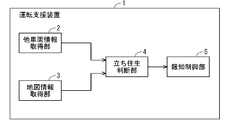
- FIG. 1 is a block diagram showing an example of the configuration of the driving support device 1 according to the first embodiment. Note that FIG. 1 shows the minimum necessary configuration of the driving support device according to the first embodiment. It is assumed that the driving support device 6 is mounted on the own vehicle.
- the driving support device 1 includes another vehicle information acquisition unit 2, a map information acquisition unit 3, a stuck determination unit 4, and a notification control unit 5.
- the other vehicle information acquisition unit 2 acquires other vehicle information, which is information about other vehicles existing around the intersection.
- the map information acquisition unit 3 acquires map information including lane information of the road connected to the intersection.
- the stuck determination unit 4 provides lane information of the passing road, which is the road to which the front intersection passes, and each lane in the passing road. Based on other vehicle information, it is determined whether or not the own vehicle is stuck in the front intersection.
- the notification control unit 5 controls to notify the driver of the own vehicle of predetermined driving support information.
- FIG. 2 is a block diagram showing an example of the configuration of the driving support device 6 according to another configuration.
- the driving support device 6 includes an information acquisition unit 8, a map information acquisition unit 3, an own vehicle position information acquisition unit 7, a route generation unit 9, a stuck determination unit 4, and a notification control unit. It has 5 and. Further, the information acquisition unit 8 is connected to the information distribution device 10, the map information acquisition unit 3 is connected to the map information storage device 11, and the notification control unit 5 is connected to the notification device 12.
- the information acquisition unit 8 has another vehicle information acquisition unit 2.
- the other vehicle information acquisition unit 2 acquires other vehicle information regarding other vehicles existing around the intersection from the information distribution device 10.
- the information acquisition unit 8 acquires various information including information on other vehicles from the information distribution device 10.
- the information distribution device 10 is a server provided outside the own vehicle.
- the information distribution device 10 collects probe information from a plurality of vehicles.
- the probe information includes vehicle position information, speed information, vehicle type information, and the like.
- the information distribution device 10 may collect road congestion information, construction information, and the like.
- the information distribution device 10 distributes at least probe information of the collected information to the driving support device 6 as other vehicle information in response to a request from the information acquisition unit 8.
- the map information acquisition unit 3 acquires map information including lane information of the road connected to the intersection from the map information storage device 11.
- Lane information includes at least lane position information.
- the map information storage device 11 is composed of a storage device such as a hard disk or a semiconductor memory, and stores map information including at least lane information.
- the map information storage device 11 may be provided in the own vehicle, or may be provided in the driving support device 6.
- the own vehicle position information acquisition unit 7 acquires the current position of the own vehicle as the own vehicle position information.
- the current position of the own vehicle is, for example, the absolute position of the own vehicle calculated from a GPS (Global Positioning System) signal.
- GPS Global Positioning System
- a more accurate current position of the own vehicle may be obtained based on the absolute position of the own vehicle calculated from the GPS signal, the speed of the own vehicle, the moving distance, the steering direction, and the like.
- Own vehicle information such as the speed, moving distance, and steering direction of the own vehicle is acquired from various sensors provided in the own vehicle.
- the route generation unit 9 has the current position of the own vehicle based on the map information acquired by the map information acquisition unit 3, the own vehicle position information acquired by the own vehicle position information acquisition unit 7, and a predetermined destination. Generate a route from to the destination.
- the stuck determination unit 4 obtains lane information of the passing road, which is the road to which the front intersection passes. Based on other vehicle information for each lane on the passing road, it is determined whether or not the own vehicle is stuck in the front intersection.
- the notification control unit 5 controls the notification device 12 so as to notify the driver of the own vehicle of predetermined driving support information when the stuck determination unit 4 determines that the own vehicle is stuck in the intersection. Further, the notification control unit 5 controls so that the route generated by the route generation unit 9 is displayed on the notification device 12.
- the notification device 12 has, for example, at least one of a center display, a display provided in a meter cluster, a HUD (Head Up Display), and a speaker.
- the notification of the driving support information is divided into the case of notifying that the own vehicle is stuck in the intersection and the case of notifying the avoidance route which is the route for avoiding the stuck. It is roughly divided.
- the operation of the driving support device 6 in the case of performing each notification will be described.
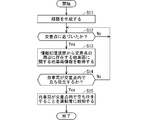
- FIG. 3 is a flowchart showing an example of the operation of the driving support device 6.
- 4 and 5 are diagrams for explaining an example of the operation of the driving support device 6.
- the blocking bar of the railroad crossing 19 is down, and other vehicles 14, 15, 16 and 17 are stopped in each lane of the road.
- the blocking bar of the railroad crossing 19 is down, the other vehicles 14 and 15 are stopped in one lane of the road, and the other vehicles are not stopped in the other lane of the road.
- step S11 the route generation unit 9 owns itself based on the map information acquired by the map information acquisition unit 3, the own vehicle position information acquired by the own vehicle position information acquisition unit 7, and a predetermined destination. A route 20 from the current position of the vehicle 13 to the destination is generated. At this time, the route generation unit 9 can generate the route 20 in lane units by using the lane information included in the map information.
- the notification control unit 5 controls the notification device 12 so as to display the route 20 generated by the route generation unit 9. Further, the notification control unit 5 may voicely guide the own vehicle 13 to travel according to the route 20. The own vehicle 13 travels from the current position to the destination according to the route 20 notified by the notification device 12.
- step S12 the stuck determination unit 4 determines whether the own vehicle 13 has approached the intersection 18 based on the map information acquired by the map information acquisition unit 3 and the own vehicle position information acquired by the own vehicle position information acquisition unit 7. Judge whether or not. Specifically, the stuck determination unit 4 determines that the own vehicle 13 has approached the intersection 18 when the distance between the current position of the own vehicle 13 and the intersection 18 is equal to or less than a predetermined distance. When the own vehicle 13 approaches the intersection 18, the process proceeds to step S13. On the other hand, if the own vehicle 13 is not approaching the intersection 18, the process returns to step S12.
- step S13 the other vehicle information acquisition unit 2 acquires other vehicle information regarding the other vehicle existing around the intersection 18 from the information distribution device 10. For example, the other vehicle information acquisition unit 2 transmits the position information of the intersection 18 to the information distribution device 10, and as a response, acquires the other vehicle information about the other vehicle existing around the intersection 18.
- the other vehicle information acquisition unit 2 acquires the other vehicle information of the other vehicles 14, 15, 16 and 17 from the information distribution device 10, and in the example of FIG. 5, each of the other vehicles 14 and 15 is obtained. Other vehicle information is acquired from the information distribution device 10.
- the other vehicle information acquisition unit 2 may acquire only other vehicle information of other vehicles existing on the road following the route 20 from the information distribution device 10 among the roads connected to the intersection 18.
- step S14 the stuck determination unit 4 determines whether or not the own vehicle 13 is stuck at the intersection 18. Specifically, the stuck determination unit 4 calculates the distance between the intersection 18 and the other vehicle closest to the intersection 18 among the other vehicles existing in each lane on the road to which the intersection 18 passes.
- the passing road of the intersection 18 is a road on which the own vehicle 13 travels after turning right at the intersection 18 according to the route 20.
- the other vehicle closest to the intersection 18 in one lane is the other vehicle 14, and the other vehicle closest to the intersection 18 in the other lane is the other vehicle.
- the stuck determination unit 4 when the distance between the other vehicle closest to the intersection 18 and the intersection 18 is longer than the size of the own vehicle, the lane having an empty space in which the own vehicle 13 can enter on the passing road Judge that there is.
- the stuck determination unit 4 when the distance between the other vehicle closest to the intersection 18 and the intersection 18 is shorter than the size of the own vehicle, the lane having an empty space in which the own vehicle 13 can enter on the passing road Judge that there is no.
- the dimension of the own vehicle 13 is the length of the own vehicle 13 in the front-rear direction, and may be registered in advance in the driving support device 6.
- the stuck determination unit 4 determines that the own vehicle 13 does not get stuck in the intersection 18. In this case, the process returns to step S12. On the other hand, the stuck determination unit 4 determines that the own vehicle 13 is stuck in the intersection 18 when there is no lane having an empty space in which the own vehicle 13 can enter on the passing road. In this case, the process proceeds to step S15.
- the stuck determination unit 4 determines that the own vehicle 13 is stuck at the intersection 18.
- the stuck determination unit 4 determines that the own vehicle 13 does not get stuck at the intersection 18.
- step S15 the notification control unit 5 controls the notification device 12 to notify the driver that the own vehicle 13 is stuck in the intersection 18.
- the notification device 12 notifies as driving support information that the own vehicle 13 is stuck in the intersection 18.
- the notification device 12 displays information indicating that the own vehicle 13 is stuck in the intersection 18.
- the notification device 12 voice-outputs that the own vehicle 13 is stuck in the intersection 18.
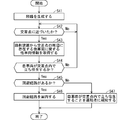
- FIG. 6 is a flowchart showing an example of the operation of the driving support device 6.
- FIG. 7 is a diagram illustrating an example of the operation of the driving support device 6. In the following, as shown in FIG. 7, a case where the own vehicle 13 travels along the route 20 and turns right at the intersection 18 which is the front intersection will be described. In the example of FIG. 7, the blocking bar of the railroad crossing 19 is down, the other vehicles 14 and 15 are stopped in one lane of the road, and the other vehicles are not stopped in the other lane of the road.
- steps S21 to S24 in FIG. 6 correspond to steps S11 to S14 in FIG. 3, and step S27 in FIG. 6 corresponds to step S15 in FIG. 3, so description thereof will be omitted here.
- steps S25 and S26 will be described.
- step S24 If it is determined in step S24 that the own vehicle 13 is stuck in the intersection 18, in step S25, the stuck determination unit 4 has an avoidance route that is a route for avoiding the own vehicle 13 being stuck in the intersection 18. Judge whether or not. Specifically, the stuck determination unit 4 instructs the route generation unit 9 to generate an avoidance route, and if the route generation unit 9 can generate an avoidance route, determines that there is an avoidance route. If the route generation unit 9 cannot generate an avoidance route, it is determined that there is no avoidance route. If it is determined that there is an avoidance route, the process proceeds to step S26. On the other hand, if it is determined that there is no avoidance route, the process proceeds to step S27.
- the route generation unit 9 generates an avoidance route based on the map information acquired by the map information acquisition unit 3 and the own vehicle position information acquired by the own vehicle position information acquisition unit 7.
- the avoidance route 22 is a route in which the other vehicles 14 and 15 travel in a lane in which the other vehicles 14 and 15 are not stopped.
- the own vehicle 13 travels according to the avoidance route 22, the own vehicle 13 does not get stuck in the intersection 18 because there is no other vehicle in the lane of the road to which the intersection 18 passes. It is assumed that the destinations of the route 20 and the avoidance route 22 are the same. In the example of FIG. 7, the avoidance route 22 that turns right at the intersection 18 is shown, but it may be an avoidance route that goes straight or turns left at the intersection 18.
- step S26 the notification control unit 5 controls to display the avoidance route 22 generated by the route generation unit 9 on the notification device 12.
- the notification device 12 displays the avoidance route 22 according to the control of the notification control unit 5. Further, the notification device 12 may voicely guide the own vehicle to travel according to the avoidance route 22.
- the information acquisition unit 8 provides information on the distance between the other vehicle closest to the intersection 18 and the intersection 18 among the other vehicles existing in each lane on the road to which the intersection 18 passes from the information distribution device 10 for each lane. You may get it. In this case, it is assumed that the information distribution device 10 calculates the distance between the intersection 18 and the other vehicle closest to the intersection 18 among the other vehicles existing in each lane on the passing road of the intersection 18 for each lane. ..
- the stuck determination unit 4 determines whether or not the own vehicle 13 is stuck in the intersection 18 by using the information on the distance between the other vehicle closest to the intersection 18 and the intersection 18 acquired by the information acquisition unit 8.
- the information acquisition unit 8 may acquire information on the number of other vehicles existing in a predetermined section on the passing road of the intersection 18 from the information distribution device 10 for each lane.
- the stuck determination unit 4 is among the other vehicles existing in each lane on the passing road of the intersection 18 based on the number of other vehicles existing in the predetermined section on the passing road of the intersection 18. The distance between the other vehicle closest to the intersection 18 and the intersection 18 is estimated for each lane.
- the information acquisition unit 8 acquires at least one of the information on the number of other vehicles, the information on the vehicle type of the other vehicle, and the traffic congestion information on the road passing through the intersection 18 from the information distribution device 10 for each lane. May be good.
- the stuck determination unit 4 can accurately estimate the distance between the intersection 18 and the other vehicle closest to the intersection 18 among the other vehicles existing in each lane on the passing road of the intersection 18 for each lane. ..
- the route generation unit 9 may generate the avoidance route 22 in consideration of the estimated arrival time at the destination. For example, the route generation unit 9 may generate the avoidance route 22 that arrives at the destination earliest in consideration of the traffic information including the traffic jam information acquired by the information acquisition unit 8.
- the route generation unit 9 may generate an avoidance route 22 based on the driving history of the driver of the own vehicle.
- the driving history of the driver of the own vehicle may include, for example, the position or route in which the own vehicle has traveled in the past, and may be associated with the speed of the own vehicle, steering and acceleration / deceleration operations by the driver, and the like.
- the driving support device 6 may hold the driving history of the driver of the own vehicle.
- the route generation unit 9 can generate an avoidance route 22 that avoids the residential area, for example, when the own vehicle does not normally travel in the residential area.
- the route generation unit 9 may generate an avoidance route 22 based on the driving history of the driver of another vehicle.
- the driving history of the driver of the other vehicle may include, for example, the position or route that the other vehicle has traveled in the past, and may be associated with the speed of the other vehicle, steering and acceleration / deceleration operations by the driver, and the like.
- the driving history of the driver of another vehicle may be acquired by the information acquisition unit 8 from the information distribution device 10.
- the information distribution device 10 collects the driving history of the driver of the other vehicle as probe information from the other vehicle.
- the route generation unit 9 can generate an avoidance route 22 that avoids a place where the speed of another vehicle is slow, for example.
- the route generation unit 9 may generate the avoidance route 22 based on the opening / closing information of the railroad crossing 19.
- the opening / closing information of the railroad crossing 19 is information indicating the open / closed state of the railroad crossing 19, that is, whether the blocking bar of the railroad crossing 19 is raised or lowered.
- the information acquisition unit 8 may acquire the opening / closing information of the railroad crossing 19 from the information distribution device 10, or may acquire the opening / closing information of the railroad crossing 19 from the railroad crossing 19.
- the route generation unit 9 can generate an avoidance route 22 capable of traveling to the destination without stopping at the railroad crossing 19.
- the stop at the railroad crossing 19 here excludes a temporary stop for confirming the traffic of trains when crossing the railroad crossing 19, and is caused by the blocking bar of the railroad crossing 19 being lowered. It means to stop at.
- the opening / closing information of the railroad crossing 19 is not limited to the current opening / closing state of the railroad crossing 19, and may be information on the timing at which the railroad crossing 19 opens / closes. Further, the route generation unit 9 may predict the timing at which the railroad crossing 19 opens and closes based on the train operation information.
- the route generation unit 9 may generate the avoidance route 22 based on the information of the traffic light.
- the traffic light information is information indicating the state of the traffic light, that is, whether or not it is possible to pass through an intersection.
- the information acquisition unit 8 may acquire the information of the traffic light from the information distribution device 10, or may acquire the information of the traffic light from the traffic light, for example. By considering the information of the traffic light, the route generation unit 9 can generate an avoidance route 22 capable of traveling to the destination without stopping at the intersection as much as possible.
- the traffic light information is not limited to the current traffic light state, but may be information on the timing at which the traffic light state changes.
- the stuck determination unit 4 may determine whether or not the own vehicle is stuck in the intersection based on the opening / closing information of the railroad crossing. For example, in FIG. 4, when the blocking rods of the railroad crossing 19 are down and the other vehicles 14, 15, 16 and 17 are stopped, when the blocking rods of the railroad crossing 19 are raised after a while, the other vehicles 14, 15, 16 , 17 travel, so there is a possibility that there will be an empty space for the own vehicle 13 in each lane on the road to which the intersection 18 passes.
- the stuck determination unit 4 considers the opening / closing information of the railroad crossing 19, and even if there is no empty space in the lane on the passing road of the intersection 18 at present, after a while, an empty space is created in the lane on the passing road of the intersection 18. If there is a possibility that it can be done, it is determined that the own vehicle 13 does not get stuck in the intersection 18.
- the stuck determination unit 4 may determine whether or not the own vehicle is stuck in the intersection based on the information of the traffic light. For example, if another vehicle is stopped because the traffic light on the road to which the intersection passes indicates that the vehicle is stopped, if the traffic light indicates that the vehicle can run after a while, the other vehicle will run, so the vehicle will pass through the intersection. There is a possibility that there will be an empty space in each lane ahead where your vehicle can enter. Therefore, the stuck determination unit 4 determines that the own vehicle will not get stuck in the intersection if there is a possibility that an empty space will be created in the lane on the passing road of the intersection after a while in consideration of the information of the traffic light.
- the stuck determination unit 4 determines whether or not there is an empty space in each lane on the road through which the intersection passes, and if there is no empty space, the own vehicle Judges that the vehicle is stuck in the intersection, and if there is an empty space, it is judged that the own vehicle is not stuck in the intersection. Therefore, it is possible to accurately determine whether or not the vehicle is stuck in the intersection. In particular, as shown in FIGS. 4, 5 and 7, it is effective when the state of the road through which the intersection 18 is passed cannot be known due to the buildings 21 existing around the intersection 18.
- FIG. 8 is a block diagram showing an example of the configuration of the driving support device 23 according to the second embodiment.
- the driving support device 23 is characterized in that the information acquisition unit 8 is connected to the roadside device 24.
- the information acquisition unit 8 acquires information from the roadside device 24 by performing road-to-vehicle communication. Since other configurations are the same as those of the driving support device 6 shown in FIG. 2 described in the first embodiment, detailed description thereof will be omitted here.
- the other vehicle information acquisition unit 2 acquires other vehicle information regarding other vehicles existing around the intersection from the roadside device 24.
- the information acquisition unit 8 acquires various information including information on other vehicles from the roadside device 24.
- the roadside device 24 is a sensor provided on a road near the intersection, including the road through which the intersection passes, and detects, for example, the position of another vehicle existing near the intersection.
- the other vehicle information acquisition unit 2 acquires other vehicle position information indicating the position of another vehicle existing near the intersection as other vehicle information from the roadside device 24.
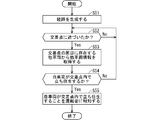
- FIG. 9 is a flowchart showing an example of the operation of the driving support device 23. Note that steps S31 and S32 in FIG. 9 correspond to steps S11 and S12 in FIG. 3, and steps S34 and S35 in FIG. 9 correspond to steps S14 and S15 in FIG. Is omitted. Hereinafter, step S33 will be described.
- step S33 the other vehicle information acquisition unit 2 acquires other vehicle information regarding other vehicles existing around the intersection from the roadside device 24.
- Other vehicle information includes other vehicle position information.
- the other vehicle information acquisition unit 2 transmits the position information of the intersection to the roadside device 24, and as a response, acquires the other vehicle information regarding the other vehicle existing around the intersection.
- the other vehicle information acquisition unit 2 acquires only other vehicle information of other vehicles existing on the road following the route generated by the route generation unit 9 from the roadside device 24 among the roads connected to the intersection. May be good.
- FIG. 10 is a flowchart showing an example of the operation of the driving support device 23. Note that steps S41 and S42 in FIG. 10 correspond to steps S21 and S22 in FIG. 6, and steps S44 to S47 in FIG. 10 correspond to steps S24 to S27 in FIG. Is omitted. Further, since step S43 in FIG. 10 corresponds to step S33 in FIG. 9, description thereof will be omitted here.
- the information acquisition unit 8 may acquire information on the distance between the intersection and the other vehicle closest to the intersection among the other vehicles existing in each lane on the road to which the intersection passes from the roadside device 24 for each lane. Good.
- the roadside device 24 calculates the distance between the intersection and the other vehicle closest to the intersection among the other vehicles existing in each lane on the road to which the intersection passes, for each lane.
- the stuck determination unit 4 determines whether or not the own vehicle is stuck in the intersection by using the information of the distance for each lane between the other vehicle closest to the intersection and the intersection acquired by the information acquisition unit 8.
- the information acquisition unit 8 may acquire information on the number of other vehicles existing in a predetermined section on the road to which the intersection passes from the roadside device 24 for each lane.
- the stuck determination unit 4 is among the other vehicles existing in each lane on the passing road of the intersection based on the number of other vehicles for each lane existing in the predetermined section on the passing road of the intersection. Estimate the distance between the other vehicle closest to the intersection and the intersection for each lane.
- the information acquisition unit 8 may acquire at least one of the information on the number of other vehicles, the information on the vehicle type of the other vehicle, and the traffic congestion information on the road passing through the intersection from the roadside device 24 for each lane. ..
- the stuck determination unit 4 can accurately estimate the distance between the intersection and the other vehicle closest to the intersection among the other vehicles existing in each lane on the road to which the intersection passes.
- the stuck determination unit 4 is vacant based on whether or not there is a vacant space in which the own vehicle can enter for each lane on the road through which the intersection passes. If there is no space, it is determined that the own vehicle is stuck in the intersection, and if there is empty space, it is determined that the own vehicle is not stuck in the intersection. Therefore, it is possible to accurately determine whether or not the vehicle is stuck in the intersection.
- FIG. 11 is a block diagram showing an example of the configuration of the driving support device 25 according to the third embodiment.
- the driving support device 25 is characterized in that the other vehicle information acquisition unit 2 is connected to the other vehicle 26.
- the other vehicle information acquisition unit 2 acquires information from the other vehicle 26 by performing vehicle-to-vehicle communication. Since other configurations are the same as those of the driving support device 6 shown in FIG. 2 described in the first embodiment, detailed description thereof will be omitted here.
- the other vehicle information acquisition unit 2 acquires other vehicle information regarding the other vehicle 26 from at least one other vehicle 26 existing around the intersection.
- the other vehicle information acquisition unit 2 acquires other vehicle information from the other vehicle 26 existing on the road through which the intersection passes.
- the other vehicle information includes other vehicle position information indicating the position of the other vehicle, speed information of the other vehicle, and the like.
- FIG. 12 is a flowchart showing an example of the operation of the driving support device 25. Note that steps S51 and S52 in FIG. 12 correspond to steps S11 and S12 in FIG. 3, and steps S54 and S55 in FIG. 12 correspond to steps S14 and S15 in FIG. Is omitted. Hereinafter, step S53 will be described.
- the other vehicle information acquisition unit 2 acquires other vehicle information related to the other vehicle 26 from the other vehicle 26 existing around the intersection. For example, the other vehicle information acquisition unit 2 transmits the position information of the intersection to the other vehicle 26 existing around the intersection, and acquires the other vehicle information of the other vehicle 26 as a response.
- the other vehicle information acquisition unit 2 may acquire only other vehicle information of the other vehicle 26 existing on the road following the route generated by the route generation unit 9 among the roads connected to the intersection.
- FIG. 13 is a flowchart showing an example of the operation of the driving support device 25. Note that steps S61 and S62 in FIG. 13 correspond to steps S21 and S22 in FIG. 6, and steps S64 to S67 in FIG. 13 correspond to steps S24 to S27 in FIG. Is omitted. Further, since step S63 in FIG. 13 corresponds to step S53 in FIG. 12, description thereof will be omitted here.
- the stuck determination unit 4 is vacant based on whether or not there is a vacant space in which the own vehicle can enter for each lane on the road through which the intersection passes. If there is no space, it is determined that the own vehicle is stuck in the intersection, and if there is empty space, it is determined that the own vehicle is not stuck in the intersection. Therefore, it is possible to accurately determine whether or not the vehicle is stuck in the intersection.
- Each function of the stuck determination unit 4 and the notification control unit 5 is realized by a processing circuit. That is, the driving support devices 6, 23, 25 acquire various information including other vehicle information, acquire map information, acquire own vehicle position information, generate a route, and the own vehicle is stuck in the intersection. It is provided with a processing circuit for determining whether or not to perform the notification and controlling the notification.
- the processing circuit is a processor (CPU (Central Processing Unit), central processing unit, processing unit, arithmetic unit, microprocessor, microcomputer, DSP (Digital) that executes programs stored in memory, even if it is dedicated hardware. It may also be called a Signal Processor).
- CPU Central Processing Unit
- processing unit processing unit
- arithmetic unit microprocessor
- microcomputer DSP (Digital) that executes programs stored in memory, even if it is dedicated hardware. It may also be called a Signal Processor).
- the processing circuit 27 may be, for example, a single circuit, a composite circuit, a programmed processor, a parallel programmed processor, or an ASIC (Application Specific Integrated Circuit). , FPGA (Field Programmable Gate Array), or a combination of these.
- Information acquisition unit 8 including other vehicle information acquisition unit 2 in driving support devices 6, 23, 25, map information acquisition unit 3, own vehicle position information acquisition unit 7, route generation unit 9, stuck determination unit 4, and notification control unit.
- Each of the functions of 5 may be realized by the processing circuit 27, or each function may be collectively realized by one processing circuit 27.
- the processing circuit 27 is the processor 28 shown in FIG. 15, the information acquisition unit 8, the map information acquisition unit 3, the own vehicle position information acquisition unit 7, including the other vehicle information acquisition unit 2 in the driving support devices 6, 23, 25,
- Each function of the route generation unit 9, the stuck determination unit 4, and the notification control unit 5 is realized by software, firmware, or a combination of software and firmware.
- the software or firmware is written as a program and stored in the memory 29.
- the processor 28 realizes each function by reading and executing the program recorded in the memory 29. That is, the driving support devices 6, 23, 25 have a step of acquiring various information including other vehicle information, a step of acquiring map information, a step of acquiring own vehicle position information, a step of generating a route, and a step of generating the own vehicle.
- a memory 29 for storing a program in which a step of determining whether or not the vehicle is stuck in the intersection and a step of controlling the notification are executed as a result is provided.
- these programs include an information acquisition unit 8 including another vehicle information acquisition unit 2, a map information acquisition unit 3, a own vehicle position information acquisition unit 7, a route generation unit 9, a stuck determination unit 4, and a notification control unit 5. It can also be said to cause a computer to execute a procedure or method.
- the memory is, for example, non-volatile or volatile such as RAM (RandomAccessMemory), ROM (ReadOnlyMemory), flash memory, EPROM (ErasableProgrammableReadOnlyMemory), and EEPROM (ElectricallyErasableProgrammableReadOnlyMemory). It may be a sex semiconductor memory, a magnetic disk, a flexible disk, an optical disk, a compact disk, a DVD (Digital Versatile Disc), or any storage medium that will be used in the future.
- the functions of the information acquisition unit 8 including the other vehicle information acquisition unit 2, the map information acquisition unit 3, the own vehicle position information acquisition unit 7, the route generation unit 9, the stuck determination unit 4, and the notification control unit 5 are described as one.
- the part may be realized by dedicated hardware, and a part may be realized by software or firmware.
- the processing circuit can realize each of the above-mentioned functions by hardware, software, firmware, or a combination thereof.
- the driving support device described above is a system in which not only an in-vehicle navigation device, that is, a car navigation device, but also a PND (Portable Navigation Device) that can be mounted on a vehicle, a server provided outside the vehicle, and the like are appropriately combined. It can also be applied to a navigation device to be constructed or a device other than the navigation device. In this case, each function or each component of the driving support device is distributed and arranged in each function for constructing the system.
- PND Portable Navigation Device
- the function of the driving support device can be arranged on the server.
- the user side includes the notification device 12.
- the server 30 includes an information acquisition unit 8 including another vehicle information acquisition unit 2, a map information acquisition unit 3, a own vehicle position information acquisition unit 7, a route generation unit 9, a stuck determination unit 4, and a notification control unit 5. ..
- the information distribution device 10 and the map information storage device 11 may be provided integrally with the server 30. With such a configuration, a driving support system can be constructed. The same applies to the driving support device 23 shown in FIG. 8 and the driving support device 25 shown in FIG.
- software that executes the operation according to the above embodiment may be incorporated into, for example, a server.
- the driving support method realized by the server executing this software acquires other vehicle information, which is information about other vehicles existing around the intersection, and maps information including lane information of the road connected to the intersection.
- vehicle information which is information about other vehicles existing around the intersection
- the own vehicle passes through the front intersection, which is an intersection existing in front of the own vehicle, the lane information of the passing road, which is the road to which the front intersection passes, and other lanes on the passing road, etc.
- Based on the vehicle information it is determined whether or not the own vehicle is stuck in the front intersection, and when it is determined that the own vehicle is stuck, control is performed to notify the driver of the own vehicle of predetermined driving support information. That is.
- each embodiment can be freely combined, and each embodiment can be appropriately modified or omitted within the scope of the invention.
- 1 Driving support device 2 Other vehicle information acquisition unit, 3 Map information acquisition unit, 4 Stuck judgment unit, 5 Notification control unit, 6 Driving support device, 7 Own vehicle position information acquisition unit, 8 Information acquisition unit, 9 Route generation unit 10, Information distribution device, 11 Map information storage device, 12 Notification device, 13 Own vehicle, 14, 15, 16, 17 Other vehicle, 18 Crossing, 19 Crossing, 20 route, 21 Building, 22 Avoidance route, 23 Driving support device , 24 roadside devices, 25 driving support devices, 26 other vehicles, 27 processing circuits, 28 processors, 29 memories, 30 servers.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Business, Economics & Management (AREA)
- Emergency Management (AREA)
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Traffic Control Systems (AREA)
- Navigation (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/020895 WO2020240660A1 (ja) | 2019-05-27 | 2019-05-27 | 運転支援装置および運転支援方法 |
| JP2021521591A JP7282169B2 (ja) | 2019-05-27 | 2019-05-27 | 運転支援装置および運転支援方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/020895 WO2020240660A1 (ja) | 2019-05-27 | 2019-05-27 | 運転支援装置および運転支援方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020240660A1 true WO2020240660A1 (ja) | 2020-12-03 |
Family
ID=73553119
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/020895 Ceased WO2020240660A1 (ja) | 2019-05-27 | 2019-05-27 | 運転支援装置および運転支援方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7282169B2 (https=) |
| WO (1) | WO2020240660A1 (https=) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005165643A (ja) * | 2003-12-02 | 2005-06-23 | Fujitsu Ten Ltd | 運転支援装置 |
| JP2009031968A (ja) * | 2007-07-26 | 2009-02-12 | Denso Corp | 交差点安全運転支援装置 |
| JP2012052956A (ja) * | 2010-09-02 | 2012-03-15 | Denso Corp | 走行支援装置、信号制御装置、及び走行支援システム |
| JP2019036826A (ja) * | 2017-08-14 | 2019-03-07 | 日産自動車株式会社 | 車両用表示方法及び車両用表示装置 |
| JP2019079232A (ja) * | 2017-10-24 | 2019-05-23 | 本田技研工業株式会社 | 車両制御装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60132300A (ja) * | 1983-12-19 | 1985-07-15 | ナイルス部品株式会社 | 踏切のしや断器に連動する信号器制御装置 |
| JP2012160127A (ja) | 2011-02-02 | 2012-08-23 | Toyota Motor Corp | 運転支援装置 |
| JP2016177638A (ja) | 2015-03-20 | 2016-10-06 | 住友電気工業株式会社 | 路側制御装置、コンピュータプログラム及び情報処理方法 |
-
2019
- 2019-05-27 WO PCT/JP2019/020895 patent/WO2020240660A1/ja not_active Ceased
- 2019-05-27 JP JP2021521591A patent/JP7282169B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005165643A (ja) * | 2003-12-02 | 2005-06-23 | Fujitsu Ten Ltd | 運転支援装置 |
| JP2009031968A (ja) * | 2007-07-26 | 2009-02-12 | Denso Corp | 交差点安全運転支援装置 |
| JP2012052956A (ja) * | 2010-09-02 | 2012-03-15 | Denso Corp | 走行支援装置、信号制御装置、及び走行支援システム |
| JP2019036826A (ja) * | 2017-08-14 | 2019-03-07 | 日産自動車株式会社 | 車両用表示方法及び車両用表示装置 |
| JP2019079232A (ja) * | 2017-10-24 | 2019-05-23 | 本田技研工業株式会社 | 車両制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2020240660A1 (https=) | 2020-12-03 |
| JP7282169B2 (ja) | 2023-05-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BR102020016058A2 (pt) | Sistema de instrução remota de veículos e dispositivo de instrução remota | |
| US10782138B2 (en) | Method, apparatus, and computer program product for pedestrian behavior profile generation | |
| CN106556403B (zh) | 驾驶辅助装置 | |
| JP6856134B2 (ja) | 運転支援方法及び運転支援装置 | |
| CN104908741B (zh) | 自主驾驶传感系统及方法 | |
| US20180037223A1 (en) | Autonomous driving assistance system, autonomous driving assistance method, and computer program | |
| US10262215B2 (en) | Scene understanding device | |
| JP2017530045A (ja) | 高度に自動化された走行機能の機能有効化 | |
| CN108603763A (zh) | 行驶计划生成装置、行驶计划生成方法和行驶计划生成程序 | |
| CN109677408A (zh) | 车辆控制器 | |
| US20200217685A1 (en) | Navigation system with maneuver guidance mechanism and method of operation thereof | |
| US11127287B2 (en) | System, method, and computer-readable storage medium for determining road type | |
| JP2007042003A (ja) | ナビゲーションシステム | |
| CN104412311A (zh) | 救援通道的形成 | |
| JP6651796B2 (ja) | 運転支援装置 | |
| CN115662171A (zh) | 变道提示方法、装置、电子设备及车辆 | |
| JPWO2020008220A1 (ja) | 運転支援方法及び運転支援装置 | |
| JPWO2020003396A1 (ja) | 運転支援装置および運転支援方法 | |
| US20250085128A1 (en) | Systems and methods for inferring information about stationary elements based on semantic relationships | |
| WO2016199287A1 (ja) | 車体映像記録装置および車体映像記録方法 | |
| JP5536976B2 (ja) | ナビゲーション装置 | |
| CN108367779B (zh) | 用于自动驾驶机动车的方法和装置 | |
| JP7252069B2 (ja) | 情報推定装置、道路案内装置、情報推定方法及び情報推定プログラム | |
| JP7647874B2 (ja) | 駐車場案内装置、システム、方法、及びプログラム | |
| WO2020110792A1 (ja) | 車両制御システム及び地図データ管理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19930983 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021521591 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 19930983 Country of ref document: EP Kind code of ref document: A1 |