WO2020121736A1 - 光検出装置及び測距装置 - Google Patents
光検出装置及び測距装置 Download PDFInfo
- Publication number
- WO2020121736A1 WO2020121736A1 PCT/JP2019/044832 JP2019044832W WO2020121736A1 WO 2020121736 A1 WO2020121736 A1 WO 2020121736A1 JP 2019044832 W JP2019044832 W JP 2019044832W WO 2020121736 A1 WO2020121736 A1 WO 2020121736A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- circuit
- light receiving
- receiving element
- vehicle
- output
- Prior art date
Links
- 238000005259 measurement Methods 0.000 title claims abstract description 16
- 230000004044 response Effects 0.000 claims abstract description 9
- 238000001514 detection method Methods 0.000 claims description 57
- 238000012544 monitoring process Methods 0.000 claims description 9
- 238000004891 communication Methods 0.000 description 44
- 238000010586 diagram Methods 0.000 description 28
- 238000000034 method Methods 0.000 description 21
- 238000003384 imaging method Methods 0.000 description 18
- 238000005516 engineering process Methods 0.000 description 15
- 238000012545 processing Methods 0.000 description 15
- 230000003287 optical effect Effects 0.000 description 11
- 238000007493 shaping process Methods 0.000 description 10
- 230000006870 function Effects 0.000 description 9
- 239000004065 semiconductor Substances 0.000 description 9
- 230000004048 modification Effects 0.000 description 7
- 238000012986 modification Methods 0.000 description 7
- 239000000758 substrate Substances 0.000 description 7
- 238000010791 quenching Methods 0.000 description 6
- 238000006243 chemical reaction Methods 0.000 description 4
- 230000007423 decrease Effects 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000015556 catabolic process Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 230000006866 deterioration Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 230000010267 cellular communication Effects 0.000 description 2
- 238000002485 combustion reaction Methods 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000007257 malfunction Effects 0.000 description 2
- 238000011084 recovery Methods 0.000 description 2
- 230000005236 sound signal Effects 0.000 description 2
- 240000004050 Pentaglottis sempervirens Species 0.000 description 1
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000003190 augmentative effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
Images













Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K17/00—Electronic switching or gating, i.e. not by contact-making and –breaking
- H03K17/94—Electronic switching or gating, i.e. not by contact-making and –breaking characterised by the way in which the control signals are generated
- H03K17/941—Electronic switching or gating, i.e. not by contact-making and –breaking characterised by the way in which the control signals are generated using an optical detector
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4861—Circuits for detection, sampling, integration or read-out
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/10—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
- G01S17/894—3D imaging with simultaneous measurement of time-of-flight at a 2D array of receiver pixels, e.g. time-of-flight cameras or flash lidar
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4861—Circuits for detection, sampling, integration or read-out
- G01S7/4863—Detector arrays, e.g. charge-transfer gates
Definitions
- the present disclosure relates to a light detection device and a distance measuring device.
- a light receiving element for detecting light
- a distance measuring device using an element that generates a signal in response to the reception of a photon for example, refer to Patent Document 1.
- the number of pulses is detected when the light intensity is low, and the pulse width is detected when the light intensity is high, based on the measurement result of ToF (Time of Flight). I am trying to do it.
- the light detection operation using the light receiving element that generates a signal in response to the reception of a photon is performed by repeating the light detection operation using the SPAD (Single Photon Avalanche Diode) element and the generation/stop of the avalanche current, for example. ..
- the recovery of the cathode voltage lowered by the avalanche current is performed by the recharge circuit connected to the light receiving element.
- pixel circuits that include light-receiving elements: a passive type that passively controls the avalanche current and an active type that actively switches by controlling timing and other factors.
- the active method has a higher degree of freedom in adjustment than the passive method, but on the other hand, if accurate timing control is not performed, malfunction may occur, or an overvoltage exceeding the specified value may be applied to the circuit element, causing deterioration of the circuit element. May occur.
- Patent Document 1 describes a passive pixel circuit. Therefore, the prior art described in Patent Document 1 does not consider the above-mentioned risk of the active method, that is, the risk of applying an overvoltage to the circuit element.
- the present disclosure aims to provide a photodetection device that can reduce the risk of overvoltage being applied to a circuit element while maintaining the merits of the active method, and a distance measuring device including the photodetection device.
- the photodetector of the present disclosure for achieving the above object, Light receiving element, A load circuit connected to the light receiving element, A switch circuit connected to the light receiving element, and A feedback circuit that operates the switch circuit according to the output from the light receiving element, Equipped with The feedback circuit has a delay circuit.
- a distance measuring device for achieving the above object is A light source that irradiates the measurement object with light, and Equipped with a light detection device that detects the light reflected by the measurement object, As the photodetector, the photodetector having the above configuration is used.
- FIG. 1 is a schematic configuration diagram showing a distance measuring device according to an embodiment of the present disclosure.
- 2A and 2B are block diagrams showing a specific configuration of the distance measuring device according to the embodiment of the present disclosure.
- FIG. 3A is a circuit diagram showing a pixel circuit according to a first example of a passive system
- FIG. 3B is a circuit diagram showing a pixel circuit according to a second example of a passive system.
- FIG. 4A is a waveform diagram for explaining the circuit operation of the passive pixel circuit
- FIG. 4B is a waveform diagram for explaining the circuit operation of the active pixel circuit.
- FIG. 5 is a waveform diagram illustrating the dead time DT of the SPAD element when the irradiation light amount is relatively small.
- FIG. 6 is a circuit diagram showing an active pixel circuit.
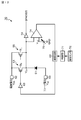
- FIG. 7 is a circuit diagram showing a pixel circuit in the photodetector according to the first embodiment.
- FIG. 8A is a circuit diagram showing a first circuit example of a delay circuit having a variable delay amount, and
- FIG. 8B is a circuit diagram showing a second circuit example.
- 9A is a waveform diagram of the cathode voltage and the SPAD output when the dead time DT is short
- FIG. 9B is a waveform diagram of the cathode voltage and the SPAD output when the dead time DT is long.
- FIG. 10 is a circuit diagram showing a pixel circuit in the photodetector according to the second embodiment.
- FIG. 10 is a circuit diagram showing a pixel circuit in the photodetector according to the second embodiment.
- FIG. 11 is a circuit diagram showing a pixel circuit in the photodetector according to the third embodiment.
- FIG. 12 is a circuit diagram showing a pixel circuit in the photodetector according to the fourth embodiment.
- FIG. 13 is a block diagram showing a schematic configuration example of a vehicle control system that is an example of a mobile body control system to which the technology according to the present disclosure can be applied.
- FIG. 14 is a diagram showing an example of the installation position of the distance measuring device.
- the delay circuit may have a variable delay amount.
- the delay amount of the delay circuit can be controlled according to the element characteristics of the light receiving element.
- the element characteristic of the light receiving element may be a form that is the temperature of the light receiving element.
- the photodetecting device and the distance measuring device of the present disclosure including the above-described preferred forms and configurations can be configured to control the delay amount of the delay circuit based on the result of monitoring the fluctuation of the power supply voltage.
- the feedback circuit may further include a comparator.
- the comparator can be configured such that the output from the light receiving element is used as the comparison input, the reference voltage is used as the comparison reference input, and the comparison result is used as the input of the delay circuit. Further, the reference voltage of the comparator may be variable in voltage value.
- the comparison result of the comparator may be derived as a pixel circuit output based on the output of the light receiving element. ..
- the path including the feedback circuit may be provided as a path different from the path through which the output of the light receiving element is derived as the pixel circuit output.
- the light receiving element may be configured to be an element that generates a signal in response to the reception of a photon. Further, the light receiving element may be configured by a single photon avalanche diode.
- FIG. 1 is a schematic configuration diagram showing a distance measuring device according to an embodiment of the present disclosure.
- the distance measuring apparatus 1 according to the present embodiment is a measurement method for measuring the distance to the subject 10 that is a measurement target, and light (for example, laser light) emitted toward the subject 10 is reflected by the subject 10.
- the ToF method is used to measure the time it takes to return.
- the distance measuring device 1 according to the present embodiment includes the light source 20 and the light detecting device 30. Then, as the light detection device 30, a light detection device according to an embodiment of the present disclosure described later is used.
- the light source 20 includes, for example, a laser driver 21, a laser light source 22, and a diffusion lens 23, and irradiates the subject 10 with laser light.
- the laser driver 21 drives the laser light source 22 under the control of the control unit 40.
- the laser light source 22 is made of, for example, a semiconductor laser, and is driven by the laser driver 21 to emit laser light.
- the diffusing lens 23 diffuses the laser light emitted from the laser light source 22 and irradiates the subject 10 with the diffused laser light.
- the light detection device 30 has a light receiving lens 31, an optical sensor 32, and a logic circuit 33, and receives the reflected laser light that is reflected by the subject 10 and is returned from the laser light emitted by the laser irradiation unit 20.
- the light receiving lens 31 focuses the reflected laser light from the subject 10 on the light receiving surface of the optical sensor 32.
- the optical sensor 32 receives the reflected laser light from the subject 10 that has passed through the light receiving lens 31 on a pixel-by-pixel basis and photoelectrically converts it.
- the output signal of the optical sensor 32 is supplied to the control unit 40 via the logic circuit 33. Details of the optical sensor 32 will be described later.
- the control unit 40 is configured by, for example, a CPU (Central Processing Unit), controls the light source 20 and the light detection device 30, and controls the laser light emitted from the light source 20 toward the subject 10.
- the time t until the light is reflected at 10 and returned is measured.
- the distance L to the subject 10 can be calculated based on the measured time t.
- the timer is started at the timing when the pulsed light is emitted from the light source 20, and the time t is measured by stopping the timer at the timing when the photodetector 30 receives the pulsed light.
- pulsed light is emitted from the light source 20 at a predetermined cycle, and the cycle when the photodetector 30 receives the pulsed light is detected, and the phase difference between the light emission cycle and the light reception cycle is detected.
- the time t from may be measured.
- the time measurement is executed a plurality of times, and the time t is measured by detecting the peak of the histogram in which the times measured a plurality of times are accumulated.
- a two-dimensional array sensor in which pixels including light receiving elements (light receiving portions) are arranged in a two-dimensional array can be used, or pixels including light receiving elements are linear. It is also possible to use a one-dimensional array sensor (so-called line sensor) that is arranged in the.
- the optical sensor 32 a sensor in which the light receiving element of the pixel generates a signal in response to the reception of photons, for example, a sensor including a SPAD (Single Photon Avalanche Diode) element I am using. That is, the photodetector 30 according to the present embodiment has a configuration in which the light receiving element of the pixel is a SPAD element.
- the light receiving element is not limited to the SPAD element, and may be various elements such as APD (Avalanche Photo Diode) and CAPD (Current Assisted Photonic Demodulator).
- the first example of the passive method is an example in which the load circuit 55 includes a resistance element R.
- a pixel circuit according to the first example of the passive system is shown in FIG. 3A.
- the cathode electrode is connected to the terminal 52 to which the power supply voltage V DD is applied via the resistance element R which is the load circuit 55, and the anode electrode is , Anode voltage V bd is applied to the terminal 53. A large negative voltage that causes avalanche multiplication is applied as the anode voltage V bd . Then, the cathode voltage V CA of the SPAD element 51 is derived as a SPAD output (pixel circuit output) via the waveform shaping circuit 54 including the P-type MOS transistor Q p and the N-type MOS transistor Q n .
- a voltage equal to or higher than the breakdown voltage V BD (for example, ⁇ 50 to ⁇ 10 V) is applied to the SPAD element 51.
- An excess voltage equal to or higher than the breakdown voltage V BD is called an excess bias voltage V EX, and a voltage of about 2-5 V is common. This is a larger value than the conventional photodiode.
- the SPAD element 51 operates in a region called a Geiger mode that has no DC stable point.
- the load circuit 55 is a constant current source, for example is an example made of P-type MOS transistor Q L.
- a pixel circuit according to the second example of the passive method is shown in FIG. 3B.
- the pixel circuit 50 according to a second example of a passive system the load circuit 55 in the pixel circuit 50 according to the first example of the passive type, a difference from the resistance element R by replacing the P-type MOS transistor Q L, it
- the circuit configuration other than that is basically the same as the pixel circuit 50 according to the first example illustrated in FIG. 3A.
- circuit operation of passive type pixel circuit The circuit operation of the passive type pixel circuit 50 having the above configuration will be described with reference to the waveform diagram of FIG. 4A.
- V DD -V bd When no current is flowing through the SPAD element 51, a voltage of V DD -V bd is applied to the SPAD element 51. This voltage value (V DD -V bd ) is (V BD +V EX ). Then, at the PN junction of the SPAD element 51, dark electron generation rate DCR (Dark Count Rate) and electrons generated by light irradiation undergo avalanche multiplication, and avalanche current I a is generated. This phenomenon stochastically occurs even in a state where light is shielded (that is, a state where no light is incident). This is the dark electron generation rate DCR.
- DCR dark Count Rate
- the cathode voltage V CA decreases and the terminal voltage of the SPAD element 51, that is, the cathode voltage V CA becomes the breakdown voltage V BD of the PN diode, the avalanche current I a stops. This operation is a so-called quench operation, and the cathode voltage V CA of the SPAD element 51 at this time is the quench voltage.
- a load circuit 55 resistance element R, or recovery from the P-type MOS transistor Q L by recharging current I r is supplied, a cathode voltage V CA in SPAD device 51, from the quench voltage to the power supply voltage V DD Then, it returns to the initial state again. That is, the resistance element R, or load circuit 55 composed of a P-type MOS transistor Q L is a recharging circuit for supplying recharging current I r in the SPAD device 51 in order to recover the cathode voltage V CA of SPAD devices 51.
- the avalanche current I a is generated as a seed. Therefore, even if one photon is incident, there is a certain probability PDE (Photon Detection Efficiency). ) Can be detected.
- PDE Photon Detection Efficiency
- the cathode voltage V CA is waveform-shaped by the waveform shaping circuit 54, and the pulse signal having the pulse width T starting from the arrival time of one photon becomes the SPAD output (pixel circuit output).
- the SPAD element 51 is a high-performance optical sensor that can detect the incidence of a single photon with a certain probability PDE.
- a dead time DT Dead Time
- the photon detection frequency becomes high under the high light amount condition, and when the total time of the dead time DT becomes a size that cannot be ignored with respect to the observation time, the light detection accuracy decreases.
- the avalanche current I a flows through the SPAD element 51, and when the voltage applied to the SPAD element 51 decreases, the avalanche current I a naturally stops and the recharge current I r is reduced. Switch to the recharge operation. That is, in a section of the cathode voltage V CA is decreased is flowing avalanche current I a, with a decrease in the cathode voltage V CA has also begun to flow recharge current I r, therefore, the cathode voltage V CA, excessive reduction potential Does not happen.
- the dead time DT that cannot react to photons as an optical sensor will be described more specifically with reference to the waveform diagram of FIG.
- the SPAD element 51 has the dead time DT that cannot react even when light is incident, due to the time required for the cathode voltage V CA to recover to the power supply voltage V DD .
- avalanche multiplication occurs twice, and two pulse signals are generated as SPAD outputs accordingly, but in area b, avalanche multiplication occurs twice, but the pulse signal Is generated only once.
- the SPAD element 51 when the SPAD element 51 reacts once and the cathode voltage V CA becomes equal to or higher than the threshold voltage of the waveform shaping circuit 54 of the next stage, the SPAD element 51 receives the incident light. Do not generate SPAD output. That is, this period is the dead time DT, and the pulse width T is its limit value.
- the active pixel circuit 60 has a configuration including a switch circuit 61, a delay circuit 62, and an inverter circuit 63 in addition to the SPAD element 51 and the waveform shaping circuit 54.
- the switch circuit 61 is composed of, for example, a P-type MOS transistor Q S connected between the terminal 52 to which the power supply voltage V DD is applied and the cathode electrode of the SPAD element 51.
- the input terminal of the delay circuit 62 is connected to the output terminal of the waveform shaping circuit 54.
- the inverter circuit 63 has its input end connected to the output end of the delay circuit 62, and its output end connected to the gate electrode of the P-type MOS transistor Q S.
- circuit operation of active type pixel circuit The circuit operation of the active-type pixel circuit 60 having the above configuration will be described with reference to the waveform chart of FIG. 4B.
- the output of the waveform shaping circuit 54 that is, the SPAD output is delayed by the delay circuit 62 by a predetermined delay amount, and the inverter circuit 63 logically inverts the PAD MOS transistor Q. Applied to the gate electrode of S. That is, the P-type MOS transistor Q S of the switch circuit 61 performs ON/OFF operation according to the SPAD output.
- the active-type pixel circuit 60 when the avalanche current I a flows in the SPAD element 51 and the output of the waveform shaping circuit 54, that is, the logic of the SPAD output is inverted, the delay occurs regardless of the potential state of the SPAD element 51. After a desired time which is the delay amount of the circuit 62, the recharge operation is performed with a large current.
- the recharge current I r does not flow in the section where the cathode voltage V CA drops. While the avalanche current I a is lower the cathode voltage V CA, for the current value of the avalanche current I a is random, the variation lower limit voltage of the cathode voltage V CA, a possibility that the cathode voltage V CA is pulled unnecessarily There is.
- the avalanche current I a and the recharge current I r are turned on/off by an external signal, so that the degree of freedom of timing control is high. Further, since there is no limitation on the recharge current I r , there is also an advantage that the dead time DT that cannot react to photons as an optical sensor can be shortened to a theoretical limit value.
- the recharge current I r may flow through the SPAD element 51 before the quench operation is completed, depending on the operating conditions. Further, there is a possibility that the cathode voltage V CA of the SPAD element 51 will drop more than expected due to variations in the quench voltage, and an overvoltage of a specified value or more will be applied to the circuit element, causing deterioration of the circuit element.
- a photodetector according to an embodiment of the present disclosure operates a load circuit connected to a SPAD element, which is an example of a light receiving element, a switch circuit connected to the SPAD element, and a switch circuit according to an output from the SPAD element.
- a feedback circuit is provided, and a delay circuit is included in the feedback circuit.
- the first embodiment is an example of a hybrid recharge system in which a passive circuit and an active circuit are combined.
- a circuit diagram of the pixel circuit in the photodetector according to the first embodiment is shown in FIG.
- FIG. 7 shows a circuit configuration for one pixel.
- the hybrid recharge type pixel circuit 70 has a configuration including a load circuit 55, a switch circuit 61, a delay circuit 62, an inverter circuit 63, a control unit 71, and a temperature sensor 72 in addition to the SPAD element 51 and the waveform shaping circuit 54. Is becoming The control unit 71 and the temperature sensor 72 are commonly provided for the plurality of pixel circuits 70.
- the load circuit 55 is a passive recharge circuit
- the switch circuit 61 is an active recharge circuit. Therefore, the recharge circuit of the pixel circuit 70 according to the first embodiment is a hybrid recharge circuit in which the passive recharge circuit and the active recharge circuit are combined.
- the load circuit 55 is a recharging circuit of the passive, a case has been exemplified using a constant current source consisting of P-type MOS transistor Q L, as the load circuit 55, the resistance element R (see FIG. 3A) It may be used. This point also applies to the examples described later.
- the delay circuit 62 is provided in the path from the SPAD output to the control input of the switch circuit 61 and forms a feedback circuit for active recharge.
- the delay circuit 62 has a variable delay amount.
- the delay amount of the delay circuit 62 is controlled by the control unit 71.
- a specific circuit configuration of the delay circuit 62 having a variable delay amount will be described using the first circuit example of FIG. 8A and the second circuit example of FIG. 8B.
- both the delay circuit 62A according to the first circuit example and the delay circuit 62B according to the second circuit example two inverters IN 11 and IN 12 are cascade-connected, and a common connection node N of both inverters IN 11 and IN 12 is provided.
- a capacitor C is connected between the ground node and a GND node which is a node of the reference potential.
- the inverter IN 11 includes a P-type MOS transistor Q p1 and an N-type MOS transistor Q n1
- the inverter IN 12 includes a P-type MOS transistor Q p2 and an N-type MOS transistor Q n2 .
- the delay circuit 62A according to the first circuit example includes, in addition to the above circuit elements, a variable current source I 11 having a variable current value, which is connected between one end of the inverter IN 11 and a node of the power supply voltage V DD. , A variable current source I 11 having a variable current value, which is connected between the other end of the inverter IN 11 and the GND node. Then, in the delay circuit 62 according to the first circuit example, the delay amount is adjusted by controlling the current values of the variable current sources I 11 and I 12 . The control of the current values of the variable current sources I 11 and I 12 is performed under the control of the control unit 71.
- the delay circuit 62B according to the second circuit example includes, in addition to the above circuit elements, a constant current source I 21 connected between one end of the inverter IN 11 and a node of the power supply voltage V DD , and an inverter IN 11 . It has a constant current source I 22 connected between the end and the GND node.
- the delay circuit 62 according to the second circuit example has a variable capacitance element VC having a variable capacitance value instead of the capacitance element C, and the delay amount can be adjusted by controlling the capacitance value of the variable capacitance element VC. Done.
- the control of the capacitance value of the variable capacitance element VC is performed under the control of the control unit 71.
- the control unit 71 controls the delay amount of the delay circuit according to the element characteristics of the SPAD element 51.
- the element characteristic of the SPAD element 51 the temperature of the SPAD element 51, specifically, the junction (junction) temperature can be exemplified.
- the temperature sensor 72 detects the temperature of the SPAD element 51.
- the photodetector has, for example, a laminated structure in which at least two semiconductor substrate substrates of a first semiconductor substrate and a second semiconductor substrate are laminated, and the SPAD elements 51 are arranged in a two-dimensional array on the first semiconductor substrate.
- a circuit portion such as the pixel circuit 50 excluding the SPAD element 51 is arranged on the second semiconductor substrate.
- the temperature sensor 72 can detect the temperature of the SPAD element 51 by being mounted on the second semiconductor substrate, for example.
- the temperature sensor 72 for example, a well-known temperature sensor that measures the temperature by utilizing the characteristic that the electrical characteristics change proportionally due to the temperature change in the band gap of the semiconductor can be used.
- a switch circuit that is an active recharge circuit by a PVT (Process, Voltage, Temperature) in which a process variation, a power supply voltage variation, and a junction temperature variation are combined.
- PVT Process, Voltage, Temperature
- the control unit 71 sets the temperature of the SPAD element 51 (that is, the junction temperature) detected by the temperature sensor 72 as an element characteristic, and adjusts the delay amount of the delay circuit 62 according to the element characteristic.
- the pixel circuit 70 includes a combination of the passive recharge circuit and the active recharge circuit, and the delay amount of the delay circuit 62 depends on the temperature of the SPAD element 51 detected by the temperature sensor 72. By adjusting, the variation in junction temperature is suppressed. As a result, it is possible to reduce the risk that the cathode voltage V CA is lowered more than necessary and an overvoltage of a specified value or more is applied to the circuit element while realizing the short dead time DT.
- FIG. 9A shows a waveform diagram of the cathode voltage V CA and the SPAD output when the dead time DT is short
- FIG. 9B shows a waveform diagram of the cathode voltage V CA and the SPAD output when the dead time DT is long.
- Optimal timing for turning on the active recharge circuit differs depending on PVT (Process, Voltage, Temperature), and the quench voltage of the SPAD element 51 has some variation each time. Therefore, preliminary evaluation is performed to prepare a look-up table with a margin, and the control unit 71 sets the delay amount of the delay circuit 62 according to the condition based on the look-up table. Thereby, the minimum dead time DT under each condition can be realized.
- PVT Process, Voltage, Temperature
- the second embodiment is a modification of the first embodiment and is an example in which the delay amount is adjusted based on the voltage monitoring result.
- a circuit diagram of the pixel circuit in the photodetector according to the second embodiment is shown in FIG.
- the delay amount of the delay circuit 62 is controlled according to the temperature of the SPAD element 51, whereas in the second embodiment, the fluctuation of the power supply voltage V DD is monitored and the voltage monitor result is displayed. Accordingly, the delay amount of the delay circuit 62 is controlled.
- the pixel circuit 70 according to the second embodiment has a configuration including a voltage monitor 73 that monitors a change in the power supply voltage V DD , instead of the temperature sensor 72 that detects the temperature of the SPAD element 51. Then, the control unit 71 adjusts the delay amount of the delay circuit 62 based on the monitoring result of the voltage monitor 73.
- the pixel circuit 70 includes the combination of the passive recharge circuit and the active recharge circuit, and adjusts the delay amount of the delay circuit 62 based on the monitoring result of the voltage monitor 73, The fluctuation of the power supply voltage V DD is suppressed.
- V CA cathode voltage
- V DD overvoltage of the specified value or more
- the third embodiment is a modification of the first embodiment and is an example having a comparator in the feedback circuit.
- a circuit diagram of a pixel circuit in the photodetector according to the third embodiment is shown in FIG.
- the pixel circuit 70 according to the third embodiment is configured to include the comparator 74 in the feedback circuit for active recharge. More specifically, in the pixel circuit 70 according to the third embodiment including the combination of the passive recharge circuit and the active recharge circuit, the circuit (path) from the SPAD output to the control input of the switch circuit 61 is based on the SPAD output. It is a feedback circuit for performing active recharge.
- the feedback circuit further includes a comparator 74 in addition to the delay circuit 62.
- the comparator 74 uses the cathode voltage V CA of the SPAD element 51 as a comparison input (one input), the reference voltage V ref generated by the reference voltage generation unit 75 as a comparison reference input (the other input), and the cathode voltage V CA. Is compared with the reference voltage V ref .
- the comparison result of the comparator 74 that is, the analog-digital conversion result is supplied to the delay circuit 62 as its input and is also derived as the SPAD output which is the pixel circuit output.
- the reference voltage V ref generated by the reference voltage generator 75 has a variable voltage value.
- the pixel circuit 70 according to the third embodiment has the comparator 74 in the feedback circuit for active recharging in the pixel circuit 70 according to the first embodiment, and the voltage of the reference voltage V ref of the comparator 74.
- the value can be controlled. Then, by controlling the voltage value of the reference voltage V ref , the level of analog-digital conversion in the comparator 74 can be adjusted.
- the configuration in which the comparator 74 is provided in the feedback circuit for the pixel circuit 70 according to the first embodiment in which the delay amount of the delay circuit 62 is controlled according to the temperature of the SPAD element 51 is illustrated, but the voltage monitor The same configuration can be adopted for the pixel circuit 70 according to the second embodiment, which controls the delay amount of the delay circuit 62 based on the result.
- the fourth embodiment is a modification of the third embodiment and is a configuration example in which the path for the SPAD output and the path for the active recharge are separated.
- a circuit diagram of the pixel circuit in the photodetector according to the fourth embodiment is shown in FIG.
- the pixel circuit 70 is configured to derive the comparison result of the comparator 74 as a SPAD output and supply it to the switch circuit 61 via the delay circuit 62 in the feedback circuit.
- the path for deriving the SPAD output which is the pixel circuit output, is separated from the path including the feedback circuit for active recharge. That is, the path including the feedback circuit is provided as a path different from the path for deriving the SPAD output.
- the cathode voltage V CA of the SPAD element 51 is derived as a SPAD output via the waveform shaping circuit 54.
- the comparator 74 is configured to receive the cathode voltage V CA of the SPAD element 51 as an input and supply the comparison result to the switch circuit 61 via the delay circuit 62 in the feedback circuit.
- the same operation and effect as the pixel circuit 70 according to the third embodiment can be obtained. You can That is, by controlling the voltage value of the reference voltage V ref of the comparator 74, the level of analog-digital conversion in the comparator 74 can be adjusted.
- the configuration applied to the pixel circuit 70 according to the first exemplary embodiment in which the delay amount of the delay circuit 62 is controlled according to the temperature of the SPAD element 51 is illustrated, but the delay of the delay circuit 62 is delayed based on the voltage monitoring result.
- a similar configuration can be adopted for the pixel circuit 70 according to the second embodiment that controls the amount.
- the technology according to the present disclosure has been described above based on the preferred embodiment, the technology according to the present disclosure is not limited to the embodiment.
- the configuration and structure of the image pickup apparatus described in the above embodiments are examples, and can be changed as appropriate.
- the case where the SPAD element is used as the light receiving element has been described as an example.
- the light receiving element is not limited to the SPAD element, and the same applies when an element such as APD or CAPD is used. The action and effect of can be obtained.
- the technology according to the present disclosure can be applied to various products.
- the technology according to the present disclosure is applicable to any type of movement such as an automobile, an electric vehicle, a hybrid electric vehicle, a motorcycle, a bicycle, a personal mobility, an airplane, a drone, a ship, a robot, a construction machine, and an agricultural machine (tractor). It may be realized as a distance measuring device mounted on the body.
- FIG. 13 is a block diagram showing a schematic configuration example of a vehicle control system 7000 that is an example of a mobile body control system to which the technology according to the present disclosure can be applied.
- the vehicle control system 7000 includes a plurality of electronic control units connected via a communication network 7010.
- the vehicle control system 7000 includes a drive system control unit 7100, a body system control unit 7200, a battery control unit 7300, a vehicle exterior information detection unit 7400, a vehicle interior information detection unit 7500, and an integrated control unit 7600. ..
- the communication network 7010 connecting these plural control units complies with any standard such as CAN (Controller Area Network), LIN (Local Interconnect Network), LAN (Local Area Network), or FlexRay (registered trademark). It may be an in-vehicle communication network.
- CAN Controller Area Network
- LIN Local Interconnect Network
- LAN Local Area Network
- FlexRay registered trademark
- Each control unit includes a microcomputer that performs arithmetic processing according to various programs, a storage unit that stores a program executed by the microcomputer or parameters used for various arithmetic operations, and a drive circuit that drives various controlled devices. Equipped with.
- Each control unit is equipped with a network I/F for communicating with other control units via the communication network 7010, and is also capable of wired or wireless communication with devices or sensors inside or outside the vehicle. A communication I/F for performing communication is provided. In FIG.
- a microcomputer 7610 As the functional configuration of the integrated control unit 7600, a microcomputer 7610, a general-purpose communication I/F 7620, a dedicated communication I/F 7630, a positioning unit 7640, a beacon receiving unit 7650, an in-vehicle device I/F 7660, an audio image output unit 7670, An in-vehicle network I/F 7680 and a storage unit 7690 are illustrated.
- the other control units also include a microcomputer, a communication I/F, a storage unit, and the like.
- the drive system control unit 7100 controls the operation of devices related to the drive system of the vehicle according to various programs.
- the drive system control unit 7100 includes a drive force generation device for generating a drive force of a vehicle such as an internal combustion engine or a drive motor, a drive force transmission mechanism for transmitting the drive force to wheels, and a steering angle of the vehicle. It functions as a steering mechanism for adjusting and a control device such as a braking device for generating a braking force of the vehicle.
- the drive system control unit 7100 may have a function as a control device such as ABS (Antilock Brake System) or ESC (Electronic Stability Control).
- a vehicle state detection unit 7110 is connected to the drive system control unit 7100.
- the vehicle state detection unit 7110 includes, for example, a gyro sensor that detects the angular velocity of the shaft rotational movement of the vehicle body, an acceleration sensor that detects the acceleration of the vehicle, or an accelerator pedal operation amount, a brake pedal operation amount, or a steering wheel steering operation. At least one of the sensors for detecting the angle, the engine speed, the rotation speed of the wheels, etc. is included.
- the drive system control unit 7100 controls the internal combustion engine, the drive motor, the electric power steering device, the brake device, and the like by performing arithmetic processing using the signal input from the vehicle state detection unit 7110.
- the body system control unit 7200 controls the operation of various devices mounted on the vehicle body according to various programs.
- the body system control unit 7200 functions as a keyless entry system, a smart key system, a power window device, or a control device for various lamps such as a head lamp, a back lamp, a brake lamp, a winker, or a fog lamp.
- the body system control unit 7200 may receive radio waves or signals of various switches transmitted from a portable device that substitutes for a key.
- the body system control unit 7200 receives inputs of these radio waves or signals and controls the vehicle door lock device, power window device, lamp, and the like.
- the battery control unit 7300 controls the secondary battery 7310 that is the power supply source of the drive motor according to various programs. For example, the battery control unit 7300 receives information such as the battery temperature, the battery output voltage, and the remaining capacity of the battery from the battery device including the secondary battery 7310. The battery control unit 7300 performs arithmetic processing using these signals to control the temperature adjustment of the secondary battery 7310 or the cooling device provided in the battery device.
- the exterior information detection unit 7400 detects information outside the vehicle equipped with the vehicle control system 7000.
- the image capturing unit 7410 and the vehicle exterior information detection unit 7420 is connected to the vehicle exterior information detection unit 7400.
- the imaging unit 7410 includes at least one of a ToF (Time Of Flight) camera, a stereo camera, a monocular camera, an infrared camera, and other cameras.
- the outside-vehicle information detection unit 7420 detects, for example, an environment sensor for detecting current weather or weather, or another vehicle around the vehicle equipped with the vehicle control system 7000, an obstacle, a pedestrian, or the like. At least one of the ambient information detection sensors of.
- the environmental sensor may be, for example, at least one of a raindrop sensor that detects rainy weather, a fog sensor that detects fog, a sunshine sensor that detects the degree of sunshine, and a snow sensor that detects snowfall.
- the ambient information detection sensor may be at least one of an ultrasonic sensor, a radar device, and a LIDAR (Light Detection and Ranging, Laser Imaging Detection and Ranging) device.
- the image pickup unit 7410 and the vehicle exterior information detection unit 7420 may be provided as independent sensors or devices, or may be provided as a device in which a plurality of sensors or devices are integrated.
- FIG. 14 shows an example of installation positions of the imaging unit 7410 and the vehicle exterior information detection unit 7420.
- the imaging units 7910, 7912, 7914, 7916, 7918 are provided at at least one of the front nose of the vehicle 7900, the side mirrors, the rear bumper, the back door, and the upper part of the windshield inside the vehicle.
- the image capturing unit 7910 provided on the front nose and the image capturing unit 7918 provided on the upper part of the windshield in the vehicle interior mainly acquire an image in front of the vehicle 7900.
- the imaging units 7912 and 7914 provided in the side mirrors mainly acquire images of the side of the vehicle 7900.
- the imaging unit 7916 provided in the rear bumper or the back door mainly acquires an image of the rear of the vehicle 7900.
- the imaging unit 7918 provided on the upper part of the windshield in the vehicle interior is mainly used for detecting a preceding vehicle, a pedestrian, an obstacle, a traffic signal, a traffic sign, a lane, or the like.
- FIG. 14 shows an example of the shooting ranges of the respective image pickup units 7910, 7912, 7914, 7916.
- the imaging range a indicates the imaging range of the imaging unit 7910 provided on the front nose
- the imaging ranges b and c indicate the imaging ranges of the imaging units 7912 and 7914 provided on the side mirrors
- the imaging range d is The imaging range of the imaging part 7916 provided in the rear bumper or the back door is shown. For example, by overlaying the image data captured by the image capturing units 7910, 7912, 7914, 7916, a bird's-eye view image of the vehicle 7900 viewed from above can be obtained.
- the vehicle exterior information detection units 7920, 7922, 7924, 7926, 7928, 7930 provided on the front, rear, sides, corners of the vehicle 7900 and on the upper portion of the windshield inside the vehicle may be ultrasonic sensors or radar devices, for example.
- the vehicle exterior information detection units 7920, 7926, 7930 provided on the front nose, rear bumper, back door, and windshield of the vehicle 7900 may be, for example, LIDAR devices.
- These vehicle exterior information detection units 7920 to 7930 are mainly used for detecting a preceding vehicle, a pedestrian, an obstacle, or the like.
- the vehicle exterior information detection unit 7400 causes the image capturing unit 7410 to capture an image of the vehicle exterior and receives the captured image data. Further, the vehicle exterior information detection unit 7400 receives the detection information from the vehicle exterior information detection unit 7420 connected thereto.
- the vehicle exterior information detection unit 7420 is an ultrasonic sensor, a radar device, or a LIDAR device
- the vehicle exterior information detection unit 7400 transmits ultrasonic waves, electromagnetic waves, or the like, and receives information on the received reflected waves.
- the vehicle exterior information detection unit 7400 may perform object detection processing or distance detection processing such as people, vehicles, obstacles, signs, or characters on the road surface based on the received information.
- the vehicle exterior information detection unit 7400 may perform environment recognition processing for recognizing rainfall, fog, road surface conditions, or the like based on the received information.
- the vehicle exterior information detection unit 7400 may calculate the distance to the object outside the vehicle based on the received information.
- the vehicle exterior information detection unit 7400 may perform image recognition processing or distance detection processing that recognizes a person, a car, an obstacle, a sign, characters on the road surface, or the like based on the received image data.
- the vehicle exterior information detection unit 7400 performs processing such as distortion correction or position adjustment on the received image data, combines the image data captured by different image capturing units 7410, and generates an overhead image or a panoramic image. Good.
- the vehicle exterior information detection unit 7400 may perform viewpoint conversion processing using image data captured by different image capturing units 7410.
- the in-vehicle information detection unit 7500 detects in-vehicle information.
- a driver state detection unit 7510 that detects the state of the driver is connected.
- the driver state detection unit 7510 may include a camera that captures an image of the driver, a biometric sensor that detects biometric information of the driver, a microphone that collects voice in the vehicle, and the like.
- the biometric sensor is provided on, for example, a seat surface or a steering wheel, and detects biometric information of an occupant sitting on a seat or a driver who holds the steering wheel.
- the in-vehicle information detection unit 7500 may calculate the degree of fatigue or concentration of the driver based on the detection information input from the driver state detection unit 7510, or determine whether the driver is asleep. You may.
- the in-vehicle information detection unit 7500 may perform processing such as noise canceling processing on the collected audio signal.
- the integrated control unit 7600 controls overall operations in the vehicle control system 7000 according to various programs.
- An input unit 7800 is connected to the integrated control unit 7600.
- the input unit 7800 is realized by, for example, a device such as a touch panel, a button, a microphone, a switch or a lever that can be input and operated by a passenger. Data obtained by voice-recognizing voice input by a microphone may be input to the integrated control unit 7600.
- the input unit 7800 may be, for example, a remote control device that uses infrared rays or other radio waves, or may be an external connection device such as a mobile phone or a PDA (Personal Digital Assistant) that supports the operation of the vehicle control system 7000. May be.
- the input unit 7800 may be, for example, a camera, in which case the passenger can input information by gesture. Alternatively, data obtained by detecting the movement of the wearable device worn by the passenger may be input. Furthermore, the input unit 7800 may include, for example, an input control circuit that generates an input signal based on information input by a passenger or the like using the input unit 7800 and outputs the input signal to the integrated control unit 7600. A passenger or the like operates the input unit 7800 to input various data or instruct a processing operation to the vehicle control system 7000.
- the storage unit 7690 may include a ROM (Read Only Memory) that stores various programs executed by the microcomputer, and a RAM (Random Access Memory) that stores various parameters, calculation results, sensor values, and the like.
- the storage unit 7690 may be realized by a magnetic storage device such as an HDD (Hard Disc Drive), a semiconductor storage device, an optical storage device, a magneto-optical storage device, or the like.
- the general-purpose communication I/F 7620 is a general-purpose communication I/F that mediates communication with various devices existing in the external environment 7750.
- the general-purpose communication I/F 7620 is a cellular communication protocol such as GSM (registered trademark) (Global System of Mobile communications), WiMAX, LTE (Long Term Evolution) or LTE-A (LTE-Advanced), or a wireless LAN (Wi-Fi). (Also referred to as a registered trademark), Bluetooth (registered trademark), and other wireless communication protocols may be implemented.
- the general-purpose communication I/F 7620 is connected to a device (for example, an application server or a control server) existing on an external network (for example, the Internet, a cloud network, or a network unique to an operator) via a base station or an access point, for example. You may.
- the general-purpose communication I/F 7620 uses, for example, P2P (Peer To Peer) technology, and is a terminal existing in the vicinity of the vehicle (for example, a driver, a pedestrian or a shop terminal, or an MTC (Machine Type Communication) terminal). May be connected with.
- P2P Peer To Peer
- MTC Machine Type Communication
- the dedicated communication I/F 7630 is a communication I/F that supports a communication protocol formulated for use in a vehicle.
- the dedicated communication I/F 7630 uses a standard protocol such as WAVE (Wireless Access in Vehicle Environment), DSRC (Dedicated Short Range Communications), or cellular communication protocol, which is a combination of lower layer IEEE 802.11p and upper layer IEEE 1609, for example. May be implemented.
- the dedicated communication I/F 7630 is typically a vehicle-to-vehicle communication, a vehicle-to-infrastructure communication, a vehicle-to-home communication and a vehicle-to-pedestrian communication. ) Perform V2X communications, a concept that includes one or more of the communications.
- the positioning unit 7640 receives, for example, a GNSS signal from a GNSS (Global Navigation Satellite System) satellite (for example, a GPS signal from a GPS (Global Positioning System) satellite) to perform positioning, and the latitude, longitude, and altitude of the vehicle.
- the position information including is generated.
- the positioning unit 7640 may specify the current position by exchanging a signal with the wireless access point, or may acquire the position information from a terminal having a positioning function, such as a mobile phone, PHS, or smartphone.
- the beacon receiving unit 7650 receives, for example, a radio wave or an electromagnetic wave transmitted from a wireless station or the like installed on the road, and acquires information such as the current position, traffic jam, traffic closure, and required time.
- the function of the beacon receiving unit 7650 may be included in the dedicated communication I/F 7630 described above.
- the in-vehicle device I/F 7660 is a communication interface that mediates a connection between the microcomputer 7610 and various in-vehicle devices 7760 existing in the vehicle.
- the in-vehicle device I/F 7660 may establish a wireless connection using a wireless communication protocol such as wireless LAN, Bluetooth (registered trademark), NFC (Near Field Communication) or WUSB (Wireless USB).
- a wireless communication protocol such as wireless LAN, Bluetooth (registered trademark), NFC (Near Field Communication) or WUSB (Wireless USB).
- the in-vehicle device I/F 7660 is connected to a USB (Universal Serial Bus), HDMI (registered trademark) (High-Definition Multimedia Interface), or MHL (Mobile) via a connection terminal (and a cable, if necessary).
- a wired connection such as High-definition Link may be established.
- the in-vehicle device 7760 may include, for example, at least one of a mobile device or a wearable device that the passenger has, or an information device that is carried in or attached to the vehicle.
- the in-vehicle device 7760 may include a navigation device that searches for a route to an arbitrary destination.
- the in-vehicle device I/F 7660 exchanges control signals or data signals with these in-vehicle devices 7760.
- the in-vehicle network I/F 7680 is an interface that mediates communication between the microcomputer 7610 and the communication network 7010.
- the in-vehicle network I/F 7680 sends and receives signals and the like according to a predetermined protocol supported by the communication network 7010.
- the microcomputer 7610 of the integrated control unit 7600 passes through at least one of the general-purpose communication I/F 7620, the dedicated communication I/F 7630, the positioning unit 7640, the beacon receiving unit 7650, the in-vehicle device I/F 7660, and the in-vehicle network I/F 7680.
- the vehicle control system 7000 is controlled according to various programs based on the information acquired by the above. For example, the microcomputer 7610 calculates a control target value of the driving force generation device, the steering mechanism or the braking device based on the acquired information on the inside and outside of the vehicle, and outputs a control command to the drive system control unit 7100. Good.
- the microcomputer 7610 realizes the functions of ADAS (Advanced Driver Assistance System) that includes collision avoidance or impact mitigation of the vehicle, follow-up traveling based on inter-vehicle distance, vehicle speed maintenance traveling, vehicle collision warning, vehicle lane departure warning, etc. You may perform the coordinated control aiming at.
- the microcomputer 7610 controls the driving force generation device, the steering mechanism, the braking device, and the like based on the acquired information about the surroundings of the vehicle, so that the microcomputer 7610 automatically travels independently of the driver's operation. You may perform cooperative control for the purpose of driving etc.
- ADAS Advanced Driver Assistance System
- a general-purpose communication I/F 7620 a dedicated communication I/F 7630, a positioning unit 7640, a beacon receiving unit 7650, an in-vehicle device I/F 7660, and an in-vehicle network I/F 7680.
- the microcomputer 7610 may generate a warning signal by predicting a danger such as a vehicle collision, a pedestrian or the like approaching or entering a closed road, based on the acquired information.
- the warning signal may be, for example, a signal for generating a warning sound or lighting a warning lamp.
- the voice image output unit 7670 transmits an output signal of at least one of a voice and an image to an output device capable of visually or audibly notifying information to a passenger of the vehicle or the outside of the vehicle.
- an audio speaker 7710, a display unit 7720, and an instrument panel 7730 are illustrated as output devices.
- the display unit 7720 may include at least one of an onboard display and a head-up display, for example.
- the display unit 7720 may have an AR (Augmented Reality) display function.
- the output device may be a device other than these devices, such as headphones, a wearable device such as a glasses-type display worn by a passenger, a projector, or a lamp.
- the display device When the output device is a display device, the display device displays results obtained by various processes performed by the microcomputer 7610 or information received from another control unit in various formats such as text, images, tables, and graphs. Display visually.
- the output device is a voice output device, the voice output device converts an audio signal composed of reproduced voice data, acoustic data, or the like into an analog signal, and outputs it audibly.
- At least two control units connected via the communication network 7010 may be integrated as one control unit.
- each control unit may be composed of a plurality of control units.
- the vehicle control system 7000 may include another control unit not shown.
- some or all of the functions of one of the control units may be given to another control unit. That is, if the information is transmitted and received via the communication network 7010, the predetermined arithmetic processing may be performed by any of the control units.
- a sensor or device connected to one of the control units may be connected to another control unit, and a plurality of control units may send and receive detection information to and from each other via the communication network 7010. .
- the technology according to the present disclosure can be applied to, for example, the imaging units 7910, 7912, 7914, 7916, 7918 and the vehicle exterior information detection units 7920, 7922, 7924, 7926, 7928, 7930, among the configurations described above. Then, by applying the technology according to the present disclosure, it is possible to eliminate the risk that an overvoltage is applied to the circuit element while maintaining the merit of the active method. A detection device can be realized. Then, by mounting the photodetection device, for example, it is possible to construct a vehicle control system capable of detecting an imaging target with high accuracy.
- the delay amount of the delay circuit is controlled based on the result of monitoring the fluctuation of the power supply voltage, The photodetector according to the above [A-2].
- the feedback circuit further includes a comparator, The photodetector according to any one of [A-1] to [A-5].
- the comparator uses the output from the light receiving element as the comparison input, the reference voltage as the comparison reference input, and the comparison result as the input of the delay circuit.
- [A-8] The voltage value of the reference voltage of the comparator is variable, The photodetector according to the above [A-7].
- the comparison result of the comparator is derived as a pixel circuit output based on the output of the light receiving element, The photodetector according to [A-7] or [A-8].
- the path including the feedback circuit is provided as a path different from the path for deriving the output of the light receiving element as the pixel circuit output, The photodetector according to [A-7] or [A-8].
- the light receiving element is an element that generates a signal in response to the reception of a photon, The photodetector according to any one of [A-1] to [A-10].
- the light receiving element comprises a single photon avalanche diode, The photodetector according to the above [A-11].
- the photodetector is Light receiving element, A load circuit connected to the light receiving element, A switch circuit connected to the light receiving element, and A feedback circuit that operates the switch circuit according to the output from the light receiving element, Equipped with The feedback circuit has a delay circuit, Ranging device.
- the delay circuit has a variable delay amount, The distance measuring device according to [B-1].
- the delay amount of the delay circuit is controlled according to the element characteristics of the light receiving element, The distance measuring device according to the above [B-2].
- the element characteristic of the light receiving element is the temperature of the light receiving element, The distance measuring device according to the above [B-3].
- the delay amount of the delay circuit is controlled based on the result of monitoring the fluctuation of the power supply voltage, The distance measuring device according to the above [B-2].
- the feedback circuit further includes a comparator, The distance measuring device according to any one of [B-1] to [B-5].
- the comparator uses the output from the light receiving element as the comparison input, the reference voltage as the comparison reference input, and the comparison result as the input of the delay circuit.
- [B-8] The voltage value of the reference voltage of the comparator is variable, The distance measuring device according to [B-7].
- the comparison result of the comparator is derived as a pixel circuit output based on the output of the light receiving element, The distance measuring device according to [B-7] or [B-8].
- the path including the feedback circuit is provided as a path different from the path for deriving the output of the light receiving element as the pixel circuit output, The distance measuring device according to [B-7] or [B-8].
- the light receiving element is an element that generates a signal in response to the reception of a photon, The distance measuring device according to any one of [B-1] to [B-10].
- the light receiving element is composed of a single photon avalanche diode, The distance measuring device according to [B-11].
- 1... Distance measuring device 10... Subject (measurement object), 20... Light source, 21... Laser driver, 22... Laser light source, 23... Diffusing lens, 30... Photodetector, 31... Light receiving lens, 32... Photosensor, 33... Circuit part, 40... Control part, 50... Passive pixel circuit, 51... SPAD element, 54 ... Waveform shaping circuit, 55... Load circuit, 60... Active type pixel circuit, 61... Switch circuit, 62 (62A, 62B)... Delay circuit, 63... Inverter circuit, 70... Hybrid recharge type pixel circuit, 71... Control unit, 72... Temperature sensor, 73... Voltage monitor, 74... Comparator, 75... Reference voltage generation unit
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Measurement Of Optical Distance (AREA)
- Electronic Switches (AREA)
Abstract
本開示の光検出装置は、受光素子、受光素子に接続される負荷回路、受光素子に接続されるスイッチ回路、及び、受光素子からの出力に応じてスイッチ回路を動作させるフィードバック回路、を備える。フィードバック回路は、遅延回路を有する。本開示の測距装置は、測定対象物に対して光を照射する光源、及び、測定対象物で反射された光を検出する光検出装置を備え、光検出装置として、上記の構成の光検出装置を用いる。
Description
本開示は、光検出装置及び測距装置に関する。
光検出を行う受光素子(受光部)として、光子の受光に応じて信号を発生する素子を用いた測距装置がある(例えば、特許文献1参照)。この従来技術に係る測距装置では、ToF(Time of Flight:飛行時間)の測定結果に基づいて、光量が低い場合は、パルスの数を検出し、光量が高い場合は、パルスの幅を検出するようにしている。
ところで、光子の受光に応じて信号を発生する受光素子を用いた光検出動作は、例えばSPAD(Single Photon Avalanche Diode)素子を用いた光検出動作、アバランシェ電流の発生/停止を繰り返すことによって行われる。そして、アバランシェ電流によって引き下げられたカソード電圧の回復については、受光素子に接続されるリチャージ回路によって行われる。
受光素子を含む画素回路には、アバランシェ電流を受動的にコントロールするパッシブ方式と、タイミングなどの制御によって能動的に切り替えるアクティブ方式との2方式がある。パッシブ方式に比べてアクティブ方式の方が調整の自由度が高いが、その反面、正確なタイミング制御を行わないと誤動作を起こしたり、回路素子に規定値以上の過電圧が印加され、回路素子の劣化が生じてしまう可能性がある。
上記の特許文献1には、パッシブ方式の画素回路が記載されている。従って、当該特許文献1に記載の従来技術では、アクティブ方式の上記のリスク、即ち、回路素子に過電圧が印加されるリスクについては考慮されていない。
本開示は、アクティブ方式のメリットを維持しつつ、回路素子に過電圧が印加されるリスクを低減できる光検出装置、及び、当該光検出装置を有する測距装置を提供することを目的とする。
上記の目的を達成するための本開示の光検出装置は、
受光素子、
受光素子に接続される負荷回路、
受光素子に接続されるスイッチ回路、及び、
受光素子からの出力に応じてスイッチ回路を動作させるフィードバック回路、
を備え、
フィードバック回路は、遅延回路を有する。
受光素子、
受光素子に接続される負荷回路、
受光素子に接続されるスイッチ回路、及び、
受光素子からの出力に応じてスイッチ回路を動作させるフィードバック回路、
を備え、
フィードバック回路は、遅延回路を有する。
また、上記の目的を達成するための本開示の測距装置(距離測定装置)は、
測定対象物に対して光を照射する光源、及び、
測定対象物で反射された光を検出する光検出装置を備え、
光検出装置として、上記の構成の光検出装置を用いる。
測定対象物に対して光を照射する光源、及び、
測定対象物で反射された光を検出する光検出装置を備え、
光検出装置として、上記の構成の光検出装置を用いる。
以下、本開示に係る技術を実施するための形態(以下、「実施形態」と記述する)について図面を用いて詳細に説明する。本開示に係る技術は実施形態に限定されるものではなく、実施形態における種々の数値などは例示である。以下の説明において、同一要素又は同一機能を有する要素には同一符号を用いることとし、重複する説明は省略する。尚、説明は以下の順序で行う。
1.本開示の光検出装置及び測距装置、全般に関する説明
2.実施形態に係る測距装置
2-1.測距装置の構成の概略
2-2.SPAD素子を用いた光検出装置の基本的な画素回路
2-2-1.パッシブ方式の第1例に係る画素回路
2-2-2.パッシブ方式の第2例に係る画素回路
2-2-3.パッシブ方式の画素回路の回路動作
2-2-4.デッドタイムDTについて
2-2-5.アクティブ方式の画素回路
2-2-6.アクティブ方式の画素回路の回路動作
3.実施形態に係る光検出装置
3-1.実施例1(パッシブ回路とアクティブ回路とを組み合わせた例)
3-2.実施例2(実施例1の変形例:電圧モニタ結果に基づいて遅延量を調整する例)
3-3.実施例3(実施例1の変形例:フィードバック回路中にコンパレータを有する例)
3-4.実施例4(実施例3の変形例:SPAD出力の経路とアクティブリチャージのための経路とを分けた構成例)
4.本開示に係る技術の適用例(移動体の例)
5.本開示がとることができる構成
1.本開示の光検出装置及び測距装置、全般に関する説明
2.実施形態に係る測距装置
2-1.測距装置の構成の概略
2-2.SPAD素子を用いた光検出装置の基本的な画素回路
2-2-1.パッシブ方式の第1例に係る画素回路
2-2-2.パッシブ方式の第2例に係る画素回路
2-2-3.パッシブ方式の画素回路の回路動作
2-2-4.デッドタイムDTについて
2-2-5.アクティブ方式の画素回路
2-2-6.アクティブ方式の画素回路の回路動作
3.実施形態に係る光検出装置
3-1.実施例1(パッシブ回路とアクティブ回路とを組み合わせた例)
3-2.実施例2(実施例1の変形例:電圧モニタ結果に基づいて遅延量を調整する例)
3-3.実施例3(実施例1の変形例:フィードバック回路中にコンパレータを有する例)
3-4.実施例4(実施例3の変形例:SPAD出力の経路とアクティブリチャージのための経路とを分けた構成例)
4.本開示に係る技術の適用例(移動体の例)
5.本開示がとることができる構成
<本開示の光検出装置及び測距装置、全般に関する説明>
本開示の光検出装置及び測距装置にあっては、遅延回路について、遅延量が可変な構成とすることができる。そして、受光素子の素子特性に応じて、遅延回路の遅延量を制御する構成とすることができる。受光素子の素子特性については、受光素子の温度である形態とすることができる。
本開示の光検出装置及び測距装置にあっては、遅延回路について、遅延量が可変な構成とすることができる。そして、受光素子の素子特性に応じて、遅延回路の遅延量を制御する構成とすることができる。受光素子の素子特性については、受光素子の温度である形態とすることができる。
上述した好ましい形態、構成を含む本開示の光検出装置及び測距装置にあっては、電源電圧の変動のモニタ結果に基づいて、遅延回路の遅延量を制御する構成とすることができる。
また、上述した好ましい形態、構成を含む本開示の光検出装置及び測距装置にあっては、フィードバック回路について、コンパレータを更に有する構成とすることができる。コンパレータについは、受光素子からの出力を比較入力とし、基準電圧を比較基準入力とし、その比較結果を遅延回路の入力とする構成とすることができる。また、コンパレータの基準電圧について、電圧値が可変な構成とすることができる。
また、上述した好ましい形態、構成を含む本開示の光検出装置及び測距装置にあっては、コンパレータの比較結果について、受光素子の出力に基づく画素回路出力として導出される構成とすることができる。あるいは又、フィードバック回路を含む経路は、受光素子の出力を画素回路出力として導出する経路とは別の経路として設けられた構成とすることができる。
また、上述した好ましい形態、構成を含む本開示の光検出装置及び測距装置にあっては、受光素子について、光子の受光に応じて信号を発生する素子である構成とすることができる。また、受光素子について、単一光子アバランシェダイオードから成る構成とすることができる。
<実施形態に係る測距装置>
[測距装置の構成の概略]
図1は、本開示の実施形態に係る測距装置を示す概略構成図である。本実施形態に係る測距装置1は、測定対象物である被写体10までの距離を測定する測定法として、被写体10に向けて照射した光(例えば、レーザ光)が、当該被写体10で反射されて戻ってくるまでの時間を測定するToF法を採用している。ToF法による距離測定を実現するために、本実施形態に係る測距装置1は、光源20及び光検出装置30を備えている。そして、光検出装置30として、後述する本開示の一実施形態に係る光検出装置を用いる。
[測距装置の構成の概略]
図1は、本開示の実施形態に係る測距装置を示す概略構成図である。本実施形態に係る測距装置1は、測定対象物である被写体10までの距離を測定する測定法として、被写体10に向けて照射した光(例えば、レーザ光)が、当該被写体10で反射されて戻ってくるまでの時間を測定するToF法を採用している。ToF法による距離測定を実現するために、本実施形態に係る測距装置1は、光源20及び光検出装置30を備えている。そして、光検出装置30として、後述する本開示の一実施形態に係る光検出装置を用いる。
本実施形態に係る測距装置1の具体的な構成を図2A及び図2Bに示す。光源20は、例えば、レーザドライバ21、レーザ光源22、及び、拡散レンズ23を有し、被写体10に対してレーザ光を照射する。レーザドライバ21は、制御部40による制御の下に、レーザ光源22を駆動する。レーザ光源22は、例えば半導体レーザから成り、レーザドライバ21によって駆動されることによりレーザ光を出射する。拡散レンズ23は、レーザ光源22から出射されたレーザ光を拡散し、被写体10に対して照射する。
光検出装置30は、受光レンズ31、光センサ32、及び、論理回路33を有し、レーザ照射部20による照射レーザ光が被写体10で反射されて戻ってくる反射レーザ光を受光する。受光レンズ31は、被写体10からの反射レーザ光を光センサ32の受光面上に集光する。光センサ32は、受光レンズ31を経た被写体10からの反射レーザ光を画素単位で受光し、光電変換する。光センサ32の出力信号は、論理回路33を経由して制御部40へ供給される。光センサ32の詳細については後述する。
制御部40は、例えば、CPU(Central Processing Unit:中央処理ユニット)等によって構成され、光源20及び光検出装置30を制御するとともに、光源20から被写体10に向けて照射したレーザ光が、当該被写体10で反射されて戻ってくるまでの時間tの計測を行う。この計測した時間tを基に、被写体10までの距離Lを求めることができる。
時間tを計測する方法としては、光源20からパルス光を照射したタイミングでタイマをスタートさせ、光検出装置30が当該パルス光を受光したタイミングでタイマをストップすることで時間tを計測する。時間計測のその他の方法として、光源20から所定の周期でパルス光を照射し、光検出装置30が当該パルス光を受光した際の周期を検出し、発光の周期と受光の周期との位相差から時間tを計測してもよい。時間計測は複数回実行され、複数回計測された時間を積み上げたヒストグラムのピークを検出することで時間tを計測する。
光センサ32としては、受光素子(受光部)を含む画素が2次元アレイ状に配置されて成る2次元アレイセンサ(所謂、エリアセンサ)を用いることもできるし、受光素子を含む画素が直線状に配置されて成る1次元アレイセンサ(所謂、ラインセンサ)を用いることもできる。
そして、本実施形態では、光センサ32として、画素の受光素子が、光子の受光に応じて信号を発生する素子、例えば、SPAD(Single Photon Avalanche Diode:単一光子アバランシェダイオード)素子から成るセンサを用いている。すなわち、本実施形態に係る光検出装置30は、画素の受光素子がSPAD素子から成る構成となっている。尚、受光素子については、SPAD素子に限定されず、APD(Avalanche Photo Diode)やCAPD(Current Assisted Photonic Demodulator)等の種々の素子であってもよい。
[SPAD素子を用いた光検出装置の基本的な画素回路]
光子の受光に応じて信号を発生する受光素子を用いた画素回路には、アバランシェ電流を受動的にコントロールするパッシブ方式と、タイミングなどの制御によって能動的に切り替えるアクティブ方式との2方式がある。
光子の受光に応じて信号を発生する受光素子を用いた画素回路には、アバランシェ電流を受動的にコントロールするパッシブ方式と、タイミングなどの制御によって能動的に切り替えるアクティブ方式との2方式がある。
(パッシブ方式の第1例に係る画素回路)
パッシブ方式の第1例は、負荷回路55が抵抗素子Rから成る例である。パッシブ方式の第1例に係る画素回路を図3Aに示す。
パッシブ方式の第1例は、負荷回路55が抵抗素子Rから成る例である。パッシブ方式の第1例に係る画素回路を図3Aに示す。
パッシブ方式の第1例に係る画素回路50では、SPAD素子51は、カソード電極が、負荷回路55である抵抗素子Rを介して、電源電圧VDDが与えられる端子52に接続され、アノード電極が、アノード電圧Vbdが与えられる端子53に接続されている。アノード電圧Vbdとしては、アバランシェ増倍が発生する大きな負電圧が印加される。そして、SPAD素子51のカソード電圧VCAが、P型MOSトランジスタQp及びN型MOSトランジスタQnから成る波形整形回路54を介してSPAD出力(画素回路出力)として導出される。
SPAD素子51には、ブレークダウン電圧VBD(例えば、-50~-10V)以上の電圧が印加される。ブレークダウン電圧VBD以上の過剰電圧は、エクセスバイアス電圧VEXと呼ばれ、2-5V程度の電圧が一般的である。これは、従来のフォトダイオードよりも大きな値である。SPAD素子51は、DC的な安定点が無いガイガーモードと呼ばれる領域で動作する。
(パッシブ方式の第2例に係る画素回路)
パッシブ方式の第2例は、負荷回路55が定電流源、例えばP型MOSトランジスタQLから成る例である。パッシブ方式の第2例に係る画素回路を図3Bに示す。
パッシブ方式の第2例は、負荷回路55が定電流源、例えばP型MOSトランジスタQLから成る例である。パッシブ方式の第2例に係る画素回路を図3Bに示す。
パッシブ方式の第2例に係る画素回路50は、パッシブ方式の第1例に係る画素回路50における負荷回路55を、抵抗素子RからP型MOSトランジスタQLに置き換えただけの違いであり、それ以外の回路構成は、基本的に、図3Aに示す第1例に係る画素回路50と同じである。
(パッシブ方式の画素回路の回路動作)
上記の構成のパッシブ方式の画素回路50の回路動作について、図4Aの波形図を用いて説明する。
上記の構成のパッシブ方式の画素回路50の回路動作について、図4Aの波形図を用いて説明する。
SPAD素子51に電流が流れていない状態では、SPAD素子51には、VDD-Vbdの電圧が印加されている。この電圧値(VDD-Vbd)は、(VBD+VEX)である。そして、SPAD素子51のPN接合部で暗電子の発生レートDCR(Dark Count Rate)や光照射によって発生した電子がアバランシェ増倍を生じ、アバランシェ電流Iaが発生する。この現象は、遮光されている状態(即ち、光が入射していない状態)でも確率的に発生している。これが暗電子の発生レートDCRである。
カソード電圧VCAが低下し、SPAD素子51の端子間電圧、即ちカソード電圧VCAがPNダイオードのブレークダウン電圧VBDになると、アバランシェ電流Iaが停止する。この動作が、所謂、クエンチ動作であり、このときのSPAD素子51のカソード電圧VCAがクエンチ電圧である。
そして、負荷回路55である抵抗素子R、又は、P型MOSトランジスタQLからリチャージ電流Irが供給されることで、SPAD素子51のカソード電圧VCAが、クエンチ電圧から電源電圧VDDまで回復し、再び初期状態に戻る。すなわち、抵抗素子R、又は、P型MOSトランジスタQLから成る負荷回路55は、SPAD素子51のカソード電圧VCAを回復させるためにSPAD素子51にリチャージ電流Irを供給するリチャージ回路である。
SPAD素子51に光が入射して1個でも電子-正孔対が発生すると、それが種となってアバランシェ電流Iaが発生するので、光子1個の入射でも、ある確率PDE(Photon Detection Efficiency)で検出することができる。この光子を検出できる確率PDEは、通常、数%~20%程度のものが多い。
以上の動作が繰り返される。そして、この一連の動作において、カソード電圧VCAが、波形整形回路54で波形整形され、1フォトンの到来時刻を開始点とするパルス幅Tのパルス信号がSPAD出力(画素回路出力)となる。
SPAD素子51は、単一光子の入射を、ある確率PDEで検出できる高性能な光センサである。しかし、一度光子の検出を行うと、数ns~数十nsの間、光センサとして光子に反応できない時間、即ち、デッドタイムDT(Dead Time)が存在する。そのため、高光量条件になって光子の検出頻度が高くなり、デッドタイムDTのトータル時間が観測時間に対して無視できない大きさになると、光検出精度が低下する。
上述したように、パッシブ方式の画素回路50では、SPAD素子51にアバランシェ電流Iaが流れて、SPAD素子51にかかる電圧が小さくなると自然にアバランシェ電流Iaが停止して、リチャージ電流Irを流すリチャージ動作に切り替わる。すなわち、カソード電圧VCAが低下する区間ではアバランシェ電流Iaが流れているが、カソード電圧VCAの低下とともにリチャージ電流Irも流れ始めており、従って、カソード電圧VCAについて、必要以上の電位低下は起こらない。
このパッシブ方式の画素回路50の場合、アバランシェ電流Iaもリチャージ電流Irも、外部から制御を行うことなく、自立してON/OFFを繰り返す動作を行うため、誤動作などのリスクは少ない。しかし、アバランシェ電流Iaに対してリチャージ電流Irを十分に小さくしておく必要があるため、回路素子の仕上がりでタイミングが決まってしまい、最悪の状態を考慮した設定を行わなければならず、特性の向上を図ることが難しい。
(デッドタイムDTについて)
ここで、光センサとして光子に反応できないデッドタイムDTについて、図5の波形図を用いてより具体的に説明する。上述したように、SPAD素子51には、カソード電圧VCAが電源電圧VDDまで回復する時間に起因して、光入射があっても反応できないデッドタイムDTが存在する。例えば、領域aでは、アバランシェ増倍が2回発生し、これに伴ってSPAD出力として2つのパルス信号が生成されるが、領域bでは、アバランシェ増倍が2回発生しているが、パルス信号の生成は1つである。
ここで、光センサとして光子に反応できないデッドタイムDTについて、図5の波形図を用いてより具体的に説明する。上述したように、SPAD素子51には、カソード電圧VCAが電源電圧VDDまで回復する時間に起因して、光入射があっても反応できないデッドタイムDTが存在する。例えば、領域aでは、アバランシェ増倍が2回発生し、これに伴ってSPAD出力として2つのパルス信号が生成されるが、領域bでは、アバランシェ増倍が2回発生しているが、パルス信号の生成は1つである。
理論的には、SPAD素子51が一度反応してからカソード電圧VCAが、次段の波形整形回路54の閾値電圧以上の電圧になるまでに発生した光入射に対しては、SPAD素子51はSPAD出力を生成しない。つまり、この期間がデッドタイムDTであり、パルス幅Tがその限界値となる。
(アクティブ方式の画素回路)
アクティブ方式の画素回路を図6に示す。アクティブ方式の画素回路60は、SPAD素子51及び波形整形回路54に加えて、スイッチ回路61、遅延回路62、及び、インバータ回路63を有する構成となっている。
アクティブ方式の画素回路を図6に示す。アクティブ方式の画素回路60は、SPAD素子51及び波形整形回路54に加えて、スイッチ回路61、遅延回路62、及び、インバータ回路63を有する構成となっている。
スイッチ回路61は、電源電圧VDDが与えられる端子52と、SPAD素子51のカソード電極との間に接続された、例えばP型MOSトランジスタQSによって構成されている。遅延回路62は、その入力端が波形整形回路54の出力端に接続されている。インバータ回路63は、その入力端が遅延回路62の出力端に接続され、その出力端がP型MOSトランジスタQSのゲート電極に接続されている。
(アクティブ方式の画素回路の回路動作)
上記の構成のアクティブ方式の画素回路60の回路動作について、図4Bの波形図を用いて説明する。
上記の構成のアクティブ方式の画素回路60の回路動作について、図4Bの波形図を用いて説明する。
上記の構成のアクティブ方式の画素回路60では、波形整形回路54の出力、即ち、SPAD出力が、遅延回路62で所定の遅延量だけ遅延され、インバータ回路63で論理反転されてP型MOSトランジスタQSのゲート電極に印加される。すなわち、スイッチ回路61のP型MOSトランジスタQSは、SPAD出力に応じてON/OFF動作を行うことになる。
そして、アクティブ方式の画素回路60では、SPAD素子51にアバランシェ電流Iaが流れて、波形整形回路54の出力、即ち、SPAD出力の論理が反転すると、SPAD素子51の電位状態に関係なく、遅延回路62の遅延量である所望の時間後に大電流でリチャージ動作が行われる。
カソード電圧VCAが低下する区間では、リチャージ電流Irは流れない。アバランシェ電流Iaがカソード電圧VCAを引き下げるが、アバランシェ電流Iaの電流値はランダムであるため、カソード電圧VCAの下限電圧がばらつき、必要以上にカソード電圧VCAが引き下げられてしまう可能性がある。
このアクティブ方式の画素回路60の場合、外部信号によって、アバランシェ電流Iaやリチャージ電流IrをON/OFFさせるため、タイミング制御の自由度が高い。また、リチャージ電流Irの制限がないため、光センサとして光子に反応できないデッドタイムDTを理論限界値まで短くできるメリットもある。
但し、アクティブ方式の画素回路60の場合には、動作条件次第では、クエンチ動作が完了する前に、SPAD素子51にリチャージ電流Irが流れてしまうことがある。また、クエンチ電圧がばらついて想定以上に、SPAD素子51のカソード電圧VCAが低下して、回路素子に規定値以上の過電圧が印加され、回路素子の劣化が生じてしまう可能性がある。
<実施形態に係る光検出装置>
本開示の実施形態に係る光検出装置は、受光素子の一例であるSPAD素子に接続される負荷回路、SPAD素子に接続されるスイッチ回路、及び、SPAD素子からの出力に応じてスイッチ回路を動作させるフィードバック回路を備え、フィードバック回路中に遅延回路を有する構成となっている。この構成により、アクティブ方式のメリットを維持しつつ、規定値以上の過電圧が発生しないようにして、回路素子に過電圧が印加されるリスクを低減し、回路素子の特性劣化を抑えることができる。
本開示の実施形態に係る光検出装置は、受光素子の一例であるSPAD素子に接続される負荷回路、SPAD素子に接続されるスイッチ回路、及び、SPAD素子からの出力に応じてスイッチ回路を動作させるフィードバック回路を備え、フィードバック回路中に遅延回路を有する構成となっている。この構成により、アクティブ方式のメリットを維持しつつ、規定値以上の過電圧が発生しないようにして、回路素子に過電圧が印加されるリスクを低減し、回路素子の特性劣化を抑えることができる。
以下に、アクティブ方式のメリットを維持しつつ、回路素子に過電圧が印加されるリスクを低減する本実施形態の具体的な実施例について説明する。
[実施例1]
実施例1は、パッシブ回路とアクティブ回路とを組み合わせたハイブリッドリチャージ方式の例である。実施例1に係る光検出装置における画素回路の回路図を図7に示す。
実施例1は、パッシブ回路とアクティブ回路とを組み合わせたハイブリッドリチャージ方式の例である。実施例1に係る光検出装置における画素回路の回路図を図7に示す。
図7には、1画素分の回路構成を図示している。ハイブリッドリチャージ方式の画素回路70は、SPAD素子51及び波形整形回路54に加えて、負荷回路55、スイッチ回路61、遅延回路62、インバータ回路63、制御部71、及び、温度センサ72を有する構成となっている。制御部71及び温度センサ72は、複数の画素回路70に対して共通に設けられることになる。
この実施例1に係る画素回路70において、負荷回路55は、パッシブ方式のリチャージ回路であり、スイッチ回路61は、アクティブ方式のリチャージ回路である。従って、実施例1に係る画素回路70のリチャージ回路は、パッシブリチャージ回路とアクティブリチャージ回路とを組み合わせたハイブリッドリチャージ回路である。
尚、ここでは、パッシブ方式のリチャージ回路である負荷回路55として、P型MOSトランジスタQLから成る定電流源を用いる場合を例示したが、負荷回路55として、抵抗素子R(図3A参照)を用いるようにしてもよい。この点については、後述する実施例においても同様である。
遅延回路62は、SPAD出力からスイッチ回路61の制御入力に至る経路中に設けられ、アクティブリチャージのためのフィードバック回路を形成している。そして、遅延回路62は、遅延量が可変な構成となっている。遅延回路62の遅延量は、制御部71によって制御される。ここで、遅延量が可変な遅延回路62の具体的な回路構成について、図8Aの第1回路例及び図8Bの第2回路例を用いて説明する。
第1回路例に係る遅延回路62A、及び、第2回路例に係る遅延回路62Bは共に、2つのインバータIN11,IN12が縦続接続され、両インバータIN11,IN12の共通接続ノードNと、基準電位のノードであるGNDノードとの間に容量素子Cが接続された構成となっている。インバータIN11は、P型MOSトランジスタQp1及びN型MOSトランジスタQn1から成り、インバータIN12は、P型MOSトランジスタQp2及びN型MOSトランジスタQn2から成る。
第1回路例に係る遅延回路62Aは、上記の回路素子の他、インバータIN11の一端と電源電圧VDDのノードとの間に接続された、電流値が可変な可変電流源I11、及び、インバータIN11の他端とGNDノードとの間に接続された、電流値が可変な可変電流源I11を有している。そして、第1回路例に係る遅延回路62は、可変電流源I11,I12の電流値の制御によって遅延量の調整が行われる。可変電流源I11,I12の電流値の制御は、制御部71による制御の下に行われる。
第2回路例に係る遅延回路62Bは、上記の回路素子の他、インバータIN11の一端と電源電圧VDDのノードとの間に接続された定電流源I21、及び、インバータIN11の他端とGNDノードとの間に接続された定電流源I22を有している。そして、第2回路例に係る遅延回路62は、容量素子Cに代えて、容量値が可変な可変容量素子VCを有しており、可変容量素子VCの容量値の制御によって遅延量の調整が行われる。可変容量素子VCの容量値の制御は、制御部71による制御の下に行われる。
制御部71は、SPAD素子51の素子特性に応じて、遅延回路の遅延量を制御する。SPAD素子51の素子特性としては、SPAD素子51の温度、具体的には、ジャンクション(接合部)温度を例示することができる。温度センサ72は、SPAD素子51の温度を検出する。
光検出装置は、例えば、第1半導体基板と第2半導体基板の少なくとも2つの半導体基板基板が積層されて成る積層構造を有し、第1半導体基板にSPAD素子51が2次元アレイ状に配置され、第2半導体基板にSPAD素子51を除く画素回路50等の回路部が配置される。この光検出装置の積層構造において、温度センサ72は、例えば第2半導体基板に搭載されることで、SPAD素子51の温度を検出することができる。温度センサ72としては、例えば、半導体のバンドギャップで温度変化により電気特性が比例的に変化する特性を利用して温度を計測する周知の温度センサを用いることができる。
上記の構成の実施例1に係る画素回路70において、プロセスばらつき、電源電圧の変動、及び、ジャンクション温度の変動が複合的に生じるPVT(Process,Voltage,Temperature)によって、アクティブリチャージ回路であるスイッチ回路61をONさせる最適なタイミングが異なる。そこで、制御部71は、温度センサ72によって検出されるSPAD素子51の温度(即ち、ジャンクション温度)を素子特性として、当該素子特性に応じて、遅延回路62の遅延量を調整する。
上述したように、実施例1に係る画素回路70は、パッシブリチャージ回路とアクティブリチャージ回路との組み合わせから成り、温度センサ72によって検出されるSPAD素子51の温度に応じて、遅延回路62の遅延量を調整することで、ジャンクション温度のばらつきを抑制する。これにより、短いデッドタイムDTを実現しつつ、必要以上にカソード電圧VCAが低下して、回路素子に規定値以上の過電圧が印加されてしまうリスクを低減できる。
デッドタイムDTが短い場合のカソード電圧VCA及びSPAD出力の波形図を図9Aに示し、デッドタイムDTが長い場合のカソード電圧VCA及びSPAD出力の波形図を図9Bに示す。
PVT(Process,Voltage,Temperature)によって、アクティブリチャージ回路をONさせる最適なタイミングが異なり、また、SPAD素子51のクエンチ電圧は、毎回、多少のばらつきを持っている。そこで、事前評価を行い、マージンをとったルックアップテーブルを用意しておき、制御部71は、このルックアップテーブルを基に、条件に応じた遅延回路62の遅延量を設定するようにする。これにより、各条件での最小のデッドタイムDTを実現することができる。
[実施例2]
実施例2は、実施例1の変形例であり、電圧モニタ結果に基づいて遅延量を調整する例である。実施例2に係る光検出装置における画素回路の回路図を図10に示す。
実施例2は、実施例1の変形例であり、電圧モニタ結果に基づいて遅延量を調整する例である。実施例2に係る光検出装置における画素回路の回路図を図10に示す。
実施例1では、SPAD素子51の温度に応じて遅延回路62の遅延量を制御するようにしているのに対し、実施例2では、電源電圧VDDの変動をモニタし、その電圧モニタ結果に応じて遅延回路62の遅延量を制御する。具体的には、実施例2に係る画素回路70は、SPAD素子51の温度を検出する温度センサ72に代えて、電源電圧VDDの変動をモニタする電圧モニタ73を有する構成となっている。そして、制御部71は、電圧モニタ73によるモニタ結果に基づいて、遅延回路62の遅延量を調整する。
上述したように、実施例2に係る画素回路70は、パッシブリチャージ回路とアクティブリチャージ回路との組み合わせから成り、電圧モニタ73のモニタ結果に基づいて、遅延回路62の遅延量を調整することによって、電源電圧VDDの変動を抑制する。これにより、実施例1の場合と同様に、短いデッドタイムDTを実現しつつ、必要以上にカソード電圧VCAが低下して、回路素子に規定値以上の過電圧が印加されてしまうリスクを低減できる。
[実施例3]
実施例3は、実施例1の変形例であり、フィードバック回路中にコンパレータを有する例である。実施例3に係る光検出装置における画素回路の回路図を図11に示す。
実施例3は、実施例1の変形例であり、フィードバック回路中にコンパレータを有する例である。実施例3に係る光検出装置における画素回路の回路図を図11に示す。
実施例3に係る画素回路70は、アクティブリチャージのためのフィードバック回路中にコンパレータ74を有する構成となっている。より具体的には、パッシブリチャージ回路とアクティブリチャージ回路との組み合わせから成る実施例3に係る画素回路70において、SPAD出力からスイッチ回路61の制御入力に至る回路(経路)は、SPAD出力に基づいてアクティブリチャージを行うためのフィードバック回路である。そして、当該フィードバック回路は、遅延回路62の他に、コンパレータ74を更に有している。
コンパレータ74は、SPAD素子51のカソード電圧VCAを比較入力(一方の入力)とし、基準電圧生成部75で生成される基準電圧Vrefを比較基準入力(他方の入力)とし、カソード電圧VCAを基準電圧Vrefと比較する。そして、コンパレータ74の比較結果、即ち、アナログ-デジタル変換結果は、遅延回路62にその入力として供給されるとともに、画素回路出力であるSPAD出力として導出される。基準電圧生成部75で生成される基準電圧Vrefは、その電圧値が可変な構成となっている。
上述したように、実施例3に係る画素回路70は、実施例1に係る画素回路70において、アクティブリチャージのためのフィードバック回路中にコンパレータ74を有し、当該コンパレータ74の基準電圧Vrefの電圧値を制御可能な構成となっている。そして、基準電圧Vrefの電圧値を制御することにより、コンパレータ74でのアナログ-デジタル変換のレベルを調整することができる。
尚、ここでは、SPAD素子51の温度に応じて遅延回路62の遅延量を制御する実施例1に係る画素回路70に対して、フィードバック回路中にコンパレータ74を設ける構成を例示したが、電圧モニタ結果に基づいて遅延回路62の遅延量を制御する実施例2に係る画素回路70に対しても同様の構成をとることができる。
[実施例4]
実施例4は、実施例3の変形例であり、SPAD出力の経路とアクティブリチャージのための経路とを分けた構成例である。実施例4に係る光検出装置における画素回路の回路図を図12に示す。
実施例4は、実施例3の変形例であり、SPAD出力の経路とアクティブリチャージのための経路とを分けた構成例である。実施例4に係る光検出装置における画素回路の回路図を図12に示す。
実施例3に係る画素回路70では、コンパレータ74の比較結果を、SPAD出力として導出するとともに、フィードバック回路中の遅延回路62を経由してスイッチ回路61に供給する構成となっている。
これに対して、実施例4に係る画素回路70は、画素回路出力であるSPAD出力を導出する経路が、アクティブリチャージのためのフィードバック回路を含む経路とを分けた構成となっている。すなわち、フィードバック回路を含む経路は、SPAD出力を導出する経路とは別の経路として設けられた構成となっている。より具体的には、実施例4に係る画素回路70において、SPAD素子51のカソード電圧VCAを、波形整形回路54を経由してSPAD出力として導出する構成となっている。また、コンパレータ74は、SPAD素子51のカソード電圧VCAを入力とし、その比較結果を、フィードバック回路中の遅延回路62を経由してスイッチ回路61に供給する構成となっている。
上述したように、SPAD出力の経路とアクティブリチャージのための経路とを分けた構成の実施例4に係る画素回路70においても、実施例3に係る画素回路70と同様の作用、効果を得ることができる。すなわち、コンパレータ74の基準電圧Vrefの電圧値を制御することにより、コンパレータ74でのアナログ-デジタル変換のレベルを調整することができる。
尚、ここでは、SPAD素子51の温度に応じて遅延回路62の遅延量を制御する実施例1に係る画素回路70に適用した構成を例示したが、電圧モニタ結果に基づいて遅延回路62の遅延量を制御する実施例2に係る画素回路70に対しても同様の構成をとることができる。
<変形例>
以上、本開示に係る技術について、好ましい実施形態に基づき説明したが、本開示に係る技術は当該実施形態に限定されるものではない。上記の実施形態において説明した撮像装置の構成、構造は例示であり、適宜、変更することができる。例えば、上記の実施形態では、受光素子としてSPAD素子を用いる場合を例に挙げて説明したが、受光素子としては、SPAD素子に限られるものではなく、APDやCAPD等の素子を用いても同様の作用、効果を得ることができる。
以上、本開示に係る技術について、好ましい実施形態に基づき説明したが、本開示に係る技術は当該実施形態に限定されるものではない。上記の実施形態において説明した撮像装置の構成、構造は例示であり、適宜、変更することができる。例えば、上記の実施形態では、受光素子としてSPAD素子を用いる場合を例に挙げて説明したが、受光素子としては、SPAD素子に限られるものではなく、APDやCAPD等の素子を用いても同様の作用、効果を得ることができる。
<本開示に係る技術の適用例>
本開示に係る技術は、様々な製品に適用することができる。以下に、より具体的な適用例について説明する。例えば、本開示に係る技術は、自動車、電気自動車、ハイブリッド電気自動車、自動二輪車、自転車、パーソナルモビリティ、飛行機、ドローン、船舶、ロボット、建設機械、農業機械(トラクター)などのいずれかの種類の移動体に搭載される測距装置として実現されてもよい。
本開示に係る技術は、様々な製品に適用することができる。以下に、より具体的な適用例について説明する。例えば、本開示に係る技術は、自動車、電気自動車、ハイブリッド電気自動車、自動二輪車、自転車、パーソナルモビリティ、飛行機、ドローン、船舶、ロボット、建設機械、農業機械(トラクター)などのいずれかの種類の移動体に搭載される測距装置として実現されてもよい。
[移動体]
図13は、本開示に係る技術が適用され得る移動体制御システムの一例である車両制御システム7000の概略的な構成例を示すブロック図である。車両制御システム7000は、通信ネットワーク7010を介して接続された複数の電子制御ユニットを備える。図13に示した例では、車両制御システム7000は、駆動系制御ユニット7100、ボディ系制御ユニット7200、バッテリ制御ユニット7300、車外情報検出ユニット7400、車内情報検出ユニット7500、及び統合制御ユニット7600を備える。これらの複数の制御ユニットを接続する通信ネットワーク7010は、例えば、CAN(Controller Area Network)、LIN(Local Interconnect Network)、LAN(Local Area Network)又はFlexRay(登録商標)等の任意の規格に準拠した車載通信ネットワークであってよい。
図13は、本開示に係る技術が適用され得る移動体制御システムの一例である車両制御システム7000の概略的な構成例を示すブロック図である。車両制御システム7000は、通信ネットワーク7010を介して接続された複数の電子制御ユニットを備える。図13に示した例では、車両制御システム7000は、駆動系制御ユニット7100、ボディ系制御ユニット7200、バッテリ制御ユニット7300、車外情報検出ユニット7400、車内情報検出ユニット7500、及び統合制御ユニット7600を備える。これらの複数の制御ユニットを接続する通信ネットワーク7010は、例えば、CAN(Controller Area Network)、LIN(Local Interconnect Network)、LAN(Local Area Network)又はFlexRay(登録商標)等の任意の規格に準拠した車載通信ネットワークであってよい。
各制御ユニットは、各種プログラムにしたがって演算処理を行うマイクロコンピュータと、マイクロコンピュータにより実行されるプログラム又は各種演算に用いられるパラメータ等を記憶する記憶部と、各種制御対象の装置を駆動する駆動回路とを備える。各制御ユニットは、通信ネットワーク7010を介して他の制御ユニットとの間で通信を行うためのネットワークI/Fを備えるとともに、車内外の装置又はセンサ等との間で、有線通信又は無線通信により通信を行うための通信I/Fを備える。図13では、統合制御ユニット7600の機能構成として、マイクロコンピュータ7610、汎用通信I/F7620、専用通信I/F7630、測位部7640、ビーコン受信部7650、車内機器I/F7660、音声画像出力部7670、車載ネットワークI/F7680及び記憶部7690が図示されている。他の制御ユニットも同様に、マイクロコンピュータ、通信I/F及び記憶部等を備える。
駆動系制御ユニット7100は、各種プログラムにしたがって車両の駆動系に関連する装置の動作を制御する。例えば、駆動系制御ユニット7100は、内燃機関又は駆動用モータ等の車両の駆動力を発生させるための駆動力発生装置、駆動力を車輪に伝達するための駆動力伝達機構、車両の舵角を調節するステアリング機構、及び、車両の制動力を発生させる制動装置等の制御装置として機能する。駆動系制御ユニット7100は、ABS(Antilock Brake System)又はESC(Electronic Stability Control)等の制御装置としての機能を有してもよい。
駆動系制御ユニット7100には、車両状態検出部7110が接続される。車両状態検出部7110には、例えば、車体の軸回転運動の角速度を検出するジャイロセンサ、車両の加速度を検出する加速度センサ、あるいは、アクセルペダルの操作量、ブレーキペダルの操作量、ステアリングホイールの操舵角、エンジン回転数又は車輪の回転速度等を検出するためのセンサのうちの少なくとも一つが含まれる。駆動系制御ユニット7100は、車両状態検出部7110から入力される信号を用いて演算処理を行い、内燃機関、駆動用モータ、電動パワーステアリング装置又はブレーキ装置等を制御する。
ボディ系制御ユニット7200は、各種プログラムにしたがって車体に装備された各種装置の動作を制御する。例えば、ボディ系制御ユニット7200は、キーレスエントリシステム、スマートキーシステム、パワーウィンドウ装置、あるいは、ヘッドランプ、バックランプ、ブレーキランプ、ウィンカー又はフォグランプ等の各種ランプの制御装置として機能する。この場合、ボディ系制御ユニット7200には、鍵を代替する携帯機から発信される電波又は各種スイッチの信号が入力され得る。ボディ系制御ユニット7200は、これらの電波又は信号の入力を受け付け、車両のドアロック装置、パワーウィンドウ装置、ランプ等を制御する。
バッテリ制御ユニット7300は、各種プログラムにしたがって駆動用モータの電力供給源である二次電池7310を制御する。例えば、バッテリ制御ユニット7300には、二次電池7310を備えたバッテリ装置から、バッテリ温度、バッテリ出力電圧又はバッテリの残存容量等の情報が入力される。バッテリ制御ユニット7300は、これらの信号を用いて演算処理を行い、二次電池7310の温度調節制御又はバッテリ装置に備えられた冷却装置等の制御を行う。
車外情報検出ユニット7400は、車両制御システム7000を搭載した車両の外部の情報を検出する。例えば、車外情報検出ユニット7400には、撮像部7410及び車外情報検出部7420のうちの少なくとも一方が接続される。撮像部7410には、ToF(Time Of Flight)カメラ、ステレオカメラ、単眼カメラ、赤外線カメラ及びその他のカメラのうちの少なくとも一つが含まれる。車外情報検出部7420には、例えば、現在の天候又は気象を検出するための環境センサ、あるいは、車両制御システム7000を搭載した車両の周囲の他の車両、障害物又は歩行者等を検出するための周囲情報検出センサのうちの少なくとも一つが含まれる。
環境センサは、例えば、雨天を検出する雨滴センサ、霧を検出する霧センサ、日照度合いを検出する日照センサ、及び降雪を検出する雪センサのうちの少なくとも一つであってよい。周囲情報検出センサは、超音波センサ、レーダ装置及びLIDAR(Light Detection and Ranging、Laser Imaging Detection and Ranging)装置のうちの少なくとも一つであってよい。これらの撮像部7410及び車外情報検出部7420は、それぞれ独立したセンサないし装置として備えられてもよいし、複数のセンサないし装置が統合された装置として備えられてもよい。
ここで、図14は、撮像部7410及び車外情報検出部7420の設置位置の例を示す。撮像部7910,7912,7914,7916,7918は、例えば、車両7900のフロントノーズ、サイドミラー、リアバンパ、バックドア及び車室内のフロントガラスの上部のうちの少なくとも一つの位置に設けられる。フロントノーズに備えられる撮像部7910及び車室内のフロントガラスの上部に備えられる撮像部7918は、主として車両7900の前方の画像を取得する。サイドミラーに備えられる撮像部7912,7914は、主として車両7900の側方の画像を取得する。リアバンパ又はバックドアに備えられる撮像部7916は、主として車両7900の後方の画像を取得する。車室内のフロントガラスの上部に備えられる撮像部7918は、主として先行車両又は、歩行者、障害物、信号機、交通標識又は車線等の検出に用いられる。
尚、図14には、それぞれの撮像部7910,7912,7914,7916の撮影範囲の一例が示されている。撮像範囲aは、フロントノーズに設けられた撮像部7910の撮像範囲を示し、撮像範囲b,cは、それぞれサイドミラーに設けられた撮像部7912,7914の撮像範囲を示し、撮像範囲dは、リアバンパ又はバックドアに設けられた撮像部7916の撮像範囲を示す。例えば、撮像部7910,7912,7914,7916で撮像された画像データが重ね合わせられることにより、車両7900を上方から見た俯瞰画像が得られる。
車両7900のフロント、リア、サイド、コーナ及び車室内のフロントガラスの上部に設けられる車外情報検出部7920,7922,7924,7926,7928,7930は、例えば超音波センサ又はレーダ装置であってよい。車両7900のフロントノーズ、リアバンパ、バックドア及び車室内のフロントガラスの上部に設けられる車外情報検出部7920,7926,7930は、例えばLIDAR装置であってよい。これらの車外情報検出部7920~7930は、主として先行車両、歩行者又は障害物等の検出に用いられる。
図13に戻って説明を続ける。車外情報検出ユニット7400は、撮像部7410に車外の画像を撮像させるとともに、撮像された画像データを受信する。また、車外情報検出ユニット7400は、接続されている車外情報検出部7420から検出情報を受信する。車外情報検出部7420が超音波センサ、レーダ装置又はLIDAR装置である場合には、車外情報検出ユニット7400は、超音波又は電磁波等を発信させるとともに、受信された反射波の情報を受信する。車外情報検出ユニット7400は、受信した情報に基づいて、人、車、障害物、標識又は路面上の文字等の物体検出処理又は距離検出処理を行ってもよい。車外情報検出ユニット7400は、受信した情報に基づいて、降雨、霧又は路面状況等を認識する環境認識処理を行ってもよい。車外情報検出ユニット7400は、受信した情報に基づいて、車外の物体までの距離を算出してもよい。
また、車外情報検出ユニット7400は、受信した画像データに基づいて、人、車、障害物、標識又は路面上の文字等を認識する画像認識処理又は距離検出処理を行ってもよい。車外情報検出ユニット7400は、受信した画像データに対して歪補正又は位置合わせ等の処理を行うとともに、異なる撮像部7410により撮像された画像データを合成して、俯瞰画像又はパノラマ画像を生成してもよい。車外情報検出ユニット7400は、異なる撮像部7410により撮像された画像データを用いて、視点変換処理を行ってもよい。
車内情報検出ユニット7500は、車内の情報を検出する。車内情報検出ユニット7500には、例えば、運転者の状態を検出する運転者状態検出部7510が接続される。運転者状態検出部7510は、運転者を撮像するカメラ、運転者の生体情報を検出する生体センサ又は車室内の音声を集音するマイク等を含んでもよい。生体センサは、例えば、座面又はステアリングホイール等に設けられ、座席に座った搭乗者又はステアリングホイールを握る運転者の生体情報を検出する。車内情報検出ユニット7500は、運転者状態検出部7510から入力される検出情報に基づいて、運転者の疲労度合い又は集中度合いを算出してもよいし、運転者が居眠りをしていないかを判別してもよい。車内情報検出ユニット7500は、集音された音声信号に対してノイズキャンセリング処理等の処理を行ってもよい。
統合制御ユニット7600は、各種プログラムにしたがって車両制御システム7000内の動作全般を制御する。統合制御ユニット7600には、入力部7800が接続されている。入力部7800は、例えば、タッチパネル、ボタン、マイクロフォン、スイッチ又はレバー等、搭乗者によって入力操作され得る装置によって実現される。統合制御ユニット7600には、マイクロフォンにより入力される音声を音声認識することにより得たデータが入力されてもよい。入力部7800は、例えば、赤外線又はその他の電波を利用したリモートコントロール装置であってもよいし、車両制御システム7000の操作に対応した携帯電話又はPDA(Personal Digital Assistant)等の外部接続機器であってもよい。入力部7800は、例えばカメラであってもよく、その場合搭乗者はジェスチャにより情報を入力することができる。あるいは、搭乗者が装着したウェアラブル装置の動きを検出することで得られたデータが入力されてもよい。さらに、入力部7800は、例えば、上記の入力部7800を用いて搭乗者等により入力された情報に基づいて入力信号を生成し、統合制御ユニット7600に出力する入力制御回路などを含んでもよい。搭乗者等は、この入力部7800を操作することにより、車両制御システム7000に対して各種のデータを入力したり処理動作を指示したりする。
記憶部7690は、マイクロコンピュータにより実行される各種プログラムを記憶するROM(Read Only Memory)、及び各種パラメータ、演算結果又はセンサ値等を記憶するRAM(Random Access Memory)を含んでいてもよい。また、記憶部7690は、HDD(Hard Disc Drive)等の磁気記憶デバイス、半導体記憶デバイス、光記憶デバイス又は光磁気記憶デバイス等によって実現してもよい。
汎用通信I/F7620は、外部環境7750に存在する様々な機器との間の通信を仲介する汎用的な通信I/Fである。汎用通信I/F7620は、GSM(登録商標)(Global System of Mobile communications)、WiMAX、LTE(Long Term Evolution)若しくはLTE-A(LTE-Advanced)などのセルラー通信プロトコル、又は無線LAN(Wi-Fi(登録商標)ともいう)、Bluetooth(登録商標)などのその他の無線通信プロトコルを実装してよい。汎用通信I/F7620は、例えば、基地局又はアクセスポイントを介して、外部ネットワーク(例えば、インターネット、クラウドネットワーク又は事業者固有のネットワーク)上に存在する機器(例えば、アプリケーションサーバ又は制御サーバ)へ接続してもよい。また、汎用通信I/F7620は、例えばP2P(Peer To Peer)技術を用いて、車両の近傍に存在する端末(例えば、運転者、歩行者若しくは店舗の端末、又はMTC(Machine Type Communication)端末)と接続してもよい。
専用通信I/F7630は、車両における使用を目的として策定された通信プロトコルをサポートする通信I/Fである。専用通信I/F7630は、例えば、下位レイヤのIEEE802.11pと上位レイヤのIEEE1609との組合せであるWAVE(Wireless Access in Vehicle Environment)、DSRC(Dedicated Short Range Communications)、又はセルラー通信プロトコルといった標準プロトコルを実装してよい。専用通信I/F7630は、典型的には、車車間(Vehicle to Vehicle)通信、路車間(Vehicle to Infrastructure)通信、車両と家との間(Vehicle to Home)の通信及び歩車間(Vehicle to Pedestrian)通信のうちの1つ以上を含む概念であるV2X通信を遂行する。
測位部7640は、例えば、GNSS(Global Navigation Satellite System)衛星からのGNSS信号(例えば、GPS(Global Positioning System)衛星からのGPS信号)を受信して測位を実行し、車両の緯度、経度及び高度を含む位置情報を生成する。尚、測位部7640は、無線アクセスポイントとの信号の交換により現在位置を特定してもよく、又は測位機能を有する携帯電話、PHS若しくはスマートフォンといった端末から位置情報を取得してもよい。
ビーコン受信部7650は、例えば、道路上に設置された無線局等から発信される電波あるいは電磁波を受信し、現在位置、渋滞、通行止め又は所要時間等の情報を取得する。尚、ビーコン受信部7650の機能は、上述した専用通信I/F7630に含まれてもよい。
車内機器I/F7660は、マイクロコンピュータ7610と車内に存在する様々な車内機器7760との間の接続を仲介する通信インタフェースである。車内機器I/F7660は、無線LAN、Bluetooth(登録商標)、NFC(Near Field Communication)又はWUSB(Wireless USB)といった無線通信プロトコルを用いて無線接続を確立してもよい。また、車内機器I/F7660は、図示しない接続端子(及び、必要であればケーブル)を介して、USB(Universal Serial Bus)、HDMI(登録商標)(High-Definition Multimedia Interface)、又はMHL(Mobile High-definition Link)等の有線接続を確立してもよい。車内機器7760は、例えば、搭乗者が有するモバイル機器若しくはウェアラブル機器、又は車両に搬入され若しくは取り付けられる情報機器のうちの少なくとも1つを含んでいてもよい。また、車内機器7760は、任意の目的地までの経路探索を行うナビゲーション装置を含んでいてもよい。車内機器I/F7660は、これらの車内機器7760との間で、制御信号又はデータ信号を交換する。
車載ネットワークI/F7680は、マイクロコンピュータ7610と通信ネットワーク7010との間の通信を仲介するインタフェースである。車載ネットワークI/F7680は、通信ネットワーク7010によりサポートされる所定のプロトコルに則して、信号等を送受信する。
統合制御ユニット7600のマイクロコンピュータ7610は、汎用通信I/F7620、専用通信I/F7630、測位部7640、ビーコン受信部7650、車内機器I/F7660及び車載ネットワークI/F7680のうちの少なくとも一つを介して取得される情報に基づき、各種プログラムにしたがって、車両制御システム7000を制御する。例えば、マイクロコンピュータ7610は、取得される車内外の情報に基づいて、駆動力発生装置、ステアリング機構又は制動装置の制御目標値を演算し、駆動系制御ユニット7100に対して制御指令を出力してもよい。例えば、マイクロコンピュータ7610は、車両の衝突回避あるいは衝撃緩和、車間距離に基づく追従走行、車速維持走行、車両の衝突警告、又は車両のレーン逸脱警告等を含むADAS(Advanced Driver Assistance System)の機能実現を目的とした協調制御を行ってもよい。また、マイクロコンピュータ7610は、取得される車両の周囲の情報に基づいて駆動力発生装置、ステアリング機構又は制動装置等を制御することにより、運転者の操作に拠らずに自律的に走行する自動運転等を目的とした協調制御を行ってもよい。
マイクロコンピュータ7610は、汎用通信I/F7620、専用通信I/F7630、測位部7640、ビーコン受信部7650、車内機器I/F7660及び車載ネットワークI/F7680のうちの少なくとも一つを介して取得される情報に基づき、車両と周辺の構造物や人物等の物体との間の3次元距離情報を生成し、車両の現在位置の周辺情報を含むローカル地図情報を作成してもよい。また、マイクロコンピュータ7610は、取得される情報に基づき、車両の衝突、歩行者等の近接又は通行止めの道路への進入等の危険を予測し、警告用信号を生成してもよい。警告用信号は、例えば、警告音を発生させたり、警告ランプを点灯させたりするための信号であってよい。
音声画像出力部7670は、車両の搭乗者又は車外に対して、視覚的又は聴覚的に情報を通知することが可能な出力装置へ音声及び画像のうちの少なくとも一方の出力信号を送信する。図13の例では、出力装置として、オーディオスピーカ7710、表示部7720及びインストルメントパネル7730が例示されている。表示部7720は、例えば、オンボードディスプレイ及びヘッドアップディスプレイの少なくとも一つを含んでいてもよい。表示部7720は、AR(Augmented Reality)表示機能を有していてもよい。出力装置は、これらの装置以外の、ヘッドホン、搭乗者が装着する眼鏡型ディスプレイ等のウェアラブルデバイス、プロジェクタ又はランプ等の他の装置であってもよい。出力装置が表示装置の場合、表示装置は、マイクロコンピュータ7610が行った各種処理により得られた結果又は他の制御ユニットから受信された情報を、テキスト、イメージ、表、グラフ等、様々な形式で視覚的に表示する。また、出力装置が音声出力装置の場合、音声出力装置は、再生された音声データ又は音響データ等からなるオーディオ信号をアナログ信号に変換して聴覚的に出力する。
尚、図13に示した例において、通信ネットワーク7010を介して接続された少なくとも二つの制御ユニットが一つの制御ユニットとして一体化されてもよい。あるいは、個々の制御ユニットが、複数の制御ユニットにより構成されてもよい。さらに、車両制御システム7000が、図示されていない別の制御ユニットを備えてもよい。また、上記の説明において、いずれかの制御ユニットが担う機能の一部又は全部を、他の制御ユニットに持たせてもよい。つまり、通信ネットワーク7010を介して情報の送受信がされるようになっていれば、所定の演算処理が、いずれかの制御ユニットで行われるようになってもよい。同様に、いずれかの制御ユニットに接続されているセンサ又は装置が、他の制御ユニットに接続されるとともに、複数の制御ユニットが、通信ネットワーク7010を介して相互に検出情報を送受信してもよい。
以上、本開示に係る技術が適用され得る車両制御システムの一例について説明した。本開示に係る技術は、以上説明した構成のうち、例えば、撮像部7910,7912,7914,7916,7918や車外情報検出部7920,7922,7924,7926,7928,7930に適用され得る。そして、本開示に係る技術を適用することにより、アクティブ方式のメリットを維持しつつ、回路素子に過電圧が印加されるリスクを無くすことができるため、回路素子の劣化を抑え、信頼性の高い光検出装置を実現できる。そして、当該光検出装置を搭載することで、例えば、撮像対象を高精度にて検出可能な車両制御システムを構築できる。
<本開示がとることができる構成>
尚、本開示は、以下のような構成をとることもできる。
尚、本開示は、以下のような構成をとることもできる。
≪A.光検出装置≫
[A-1]受光素子、
受光素子に接続される負荷回路、
受光素子に接続されるスイッチ回路、及び、
受光素子からの出力に応じてスイッチ回路を動作させるフィードバック回路、
を備え、
フィードバック回路は、遅延回路を有する、
光検出装置。
[A-2]遅延回路は、遅延量が可変である、
上記[A-1]に記載の光検出装置。
[A-3]受光素子の素子特性に応じて、遅延回路の遅延量を制御する、
上記[A-2]に記載の光検出装置。
[A-4]受光素子の素子特性は、受光素子の温度である、
上記[A-3]に記載の光検出装置。
[A-5]電源電圧の変動のモニタ結果に基づいて、遅延回路の遅延量を制御する、
上記[A-2]に記載の光検出装置。
[A-6]フィードバック回路は、コンパレータを更に有する、
上記[A-1]乃至上記[A-5]のいずれかに記載の光検出装置。
[A-7]コンパレータは、受光素子からの出力を比較入力とし、基準電圧を比較基準入力とし、その比較結果を遅延回路の入力とする、
上記[A-6]に記載の光検出装置。
[A-8]コンパレータの基準電圧は、電圧値が可変である、
上記[A-7]に記載の光検出装置。
[A-9]コンパレータの比較結果は、受光素子の出力に基づく画素回路出力として導出される、
上記[A-7]又は上記[A-8]に記載の光検出装置。
[A-10]フィードバック回路を含む経路は、受光素子の出力を画素回路出力として導出する経路とは別の経路として設けられている、
上記[A-7]又は上記[A-8]に記載の光検出装置。
[A-11]受光素子は、光子の受光に応じて信号を発生する素子である、
上記[A-1]乃至上記[A-10]のいずれかに記載の光検出装置。
[A-12]受光素子は、単一光子アバランシェダイオードから成る、
上記[A-11]に記載の光検出装置。
[A-1]受光素子、
受光素子に接続される負荷回路、
受光素子に接続されるスイッチ回路、及び、
受光素子からの出力に応じてスイッチ回路を動作させるフィードバック回路、
を備え、
フィードバック回路は、遅延回路を有する、
光検出装置。
[A-2]遅延回路は、遅延量が可変である、
上記[A-1]に記載の光検出装置。
[A-3]受光素子の素子特性に応じて、遅延回路の遅延量を制御する、
上記[A-2]に記載の光検出装置。
[A-4]受光素子の素子特性は、受光素子の温度である、
上記[A-3]に記載の光検出装置。
[A-5]電源電圧の変動のモニタ結果に基づいて、遅延回路の遅延量を制御する、
上記[A-2]に記載の光検出装置。
[A-6]フィードバック回路は、コンパレータを更に有する、
上記[A-1]乃至上記[A-5]のいずれかに記載の光検出装置。
[A-7]コンパレータは、受光素子からの出力を比較入力とし、基準電圧を比較基準入力とし、その比較結果を遅延回路の入力とする、
上記[A-6]に記載の光検出装置。
[A-8]コンパレータの基準電圧は、電圧値が可変である、
上記[A-7]に記載の光検出装置。
[A-9]コンパレータの比較結果は、受光素子の出力に基づく画素回路出力として導出される、
上記[A-7]又は上記[A-8]に記載の光検出装置。
[A-10]フィードバック回路を含む経路は、受光素子の出力を画素回路出力として導出する経路とは別の経路として設けられている、
上記[A-7]又は上記[A-8]に記載の光検出装置。
[A-11]受光素子は、光子の受光に応じて信号を発生する素子である、
上記[A-1]乃至上記[A-10]のいずれかに記載の光検出装置。
[A-12]受光素子は、単一光子アバランシェダイオードから成る、
上記[A-11]に記載の光検出装置。
≪B.測距装置≫
[B-1]測定対象物に対して光を照射する光源、及び、
測定対象物で反射された光を検出する光検出装置を有し、
光検出装置は、
受光素子、
受光素子に接続される負荷回路、
受光素子に接続されるスイッチ回路、及び、
受光素子からの出力に応じてスイッチ回路を動作させるフィードバック回路、
を備え、
フィードバック回路は、遅延回路を有する、
測距装置。
[B-2]遅延回路は、遅延量が可変である、
上記[B-1]に記載の測距装置。
[B-3]受光素子の素子特性に応じて、遅延回路の遅延量を制御する、
上記[B-2]に記載の測距装置。
[B-4]受光素子の素子特性は、受光素子の温度である、
上記[B-3]に記載の測距装置。
[B-5]電源電圧の変動のモニタ結果に基づいて、遅延回路の遅延量を制御する、
上記[B-2]に記載の測距装置。
[B-6]フィードバック回路は、コンパレータを更に有する、
上記[B-1]乃至上記[B-5]のいずれかに記載の測距装置。
[B-7]コンパレータは、受光素子からの出力を比較入力とし、基準電圧を比較基準入力とし、その比較結果を遅延回路の入力とする、
上記[B-6]に記載の測距装置。
[B-8]コンパレータの基準電圧は、電圧値が可変である、
上記[B-7]に記載の測距装置。
[B-9]コンパレータの比較結果は、受光素子の出力に基づく画素回路出力として導出される、
上記[B-7]又は上記[B-8]に記載の測距装置。
[B-10]フィードバック回路を含む経路は、受光素子の出力を画素回路出力として導出する経路とは別の経路として設けられている、
上記[B-7]又は上記[B-8]に記載の測距装置。
[B-11]受光素子は、光子の受光に応じて信号を発生する素子である、
上記[B-1]乃至上記[B-10]のいずれかに記載の測距装置。
[B-12]受光素子は、単一光子アバランシェダイオードから成る、
上記[B-11]に記載の測距装置。
[B-1]測定対象物に対して光を照射する光源、及び、
測定対象物で反射された光を検出する光検出装置を有し、
光検出装置は、
受光素子、
受光素子に接続される負荷回路、
受光素子に接続されるスイッチ回路、及び、
受光素子からの出力に応じてスイッチ回路を動作させるフィードバック回路、
を備え、
フィードバック回路は、遅延回路を有する、
測距装置。
[B-2]遅延回路は、遅延量が可変である、
上記[B-1]に記載の測距装置。
[B-3]受光素子の素子特性に応じて、遅延回路の遅延量を制御する、
上記[B-2]に記載の測距装置。
[B-4]受光素子の素子特性は、受光素子の温度である、
上記[B-3]に記載の測距装置。
[B-5]電源電圧の変動のモニタ結果に基づいて、遅延回路の遅延量を制御する、
上記[B-2]に記載の測距装置。
[B-6]フィードバック回路は、コンパレータを更に有する、
上記[B-1]乃至上記[B-5]のいずれかに記載の測距装置。
[B-7]コンパレータは、受光素子からの出力を比較入力とし、基準電圧を比較基準入力とし、その比較結果を遅延回路の入力とする、
上記[B-6]に記載の測距装置。
[B-8]コンパレータの基準電圧は、電圧値が可変である、
上記[B-7]に記載の測距装置。
[B-9]コンパレータの比較結果は、受光素子の出力に基づく画素回路出力として導出される、
上記[B-7]又は上記[B-8]に記載の測距装置。
[B-10]フィードバック回路を含む経路は、受光素子の出力を画素回路出力として導出する経路とは別の経路として設けられている、
上記[B-7]又は上記[B-8]に記載の測距装置。
[B-11]受光素子は、光子の受光に応じて信号を発生する素子である、
上記[B-1]乃至上記[B-10]のいずれかに記載の測距装置。
[B-12]受光素子は、単一光子アバランシェダイオードから成る、
上記[B-11]に記載の測距装置。
1・・・測距装置、10・・・被写体(測定対象物)、20・・・光源、21・・・レーザドライバ、22・・・レーザ光源、23・・・拡散レンズ、30・・・光検出装置、31・・・受光レンズ、32・・・光センサ、33・・・回路部、40・・・制御部、50・・・パッシブ方式の画素回路、51・・・SPAD素子、54・・・波形整形回路、55・・・負荷回路、60・・・アクティブ方式の画素回路、61・・・スイッチ回路、62(62A,62B)・・・遅延回路、63・・・インバータ回路、70・・・ハイブリッドリチャージ方式の画素回路、71・・・制御部、72・・・温度センサ、73・・・電圧モニタ、74・・・コンパレータ、75・・・基準電圧生成部
Claims (13)
- 受光素子、
受光素子に接続される負荷回路、
受光素子に接続されるスイッチ回路、及び、
受光素子からの出力に応じてスイッチ回路を動作させるフィードバック回路、
を備え、
フィードバック回路は、遅延回路を有する、
光検出装置。 - 遅延回路は、遅延量が可変である、
請求項1に記載の光検出装置。 - 受光素子の素子特性に応じて、遅延回路の遅延量を制御する、
請求項2に記載の光検出装置。 - 受光素子の素子特性は、受光素子の温度である、
請求項3に記載の光検出装置。 - 電源電圧の変動のモニタ結果に基づいて、遅延回路の遅延量を制御する、
請求項2に記載の光検出装置。 - フィードバック回路は、コンパレータを更に有する、
請求項1に記載の光検出装置。 - コンパレータは、受光素子からの出力を比較入力とし、基準電圧を比較基準入力とし、その比較結果を遅延回路の入力とする、
請求項6に記載の光検出装置。 - コンパレータの基準電圧は、電圧値が可変である、
請求項7に記載の光検出装置。 - コンパレータの比較結果は、受光素子の出力に基づく画素回路出力として導出される、
請求項7に記載の光検出装置。 - フィードバック回路を含む経路は、受光素子の出力を画素回路出力として導出する経路とは別の経路として設けられている、
請求項7に記載の光検出装置。 - 受光素子は、光子の受光に応じて信号を発生する素子である、
請求項1に記載の光検出装置。 - 受光素子は、単一光子アバランシェダイオードから成る、
請求項11に記載の光検出装置。 - 測定対象物に対して光を照射する光源、及び、
測定対象物で反射された光を検出する光検出装置を有し、
光検出装置は、
受光素子、
受光素子に接続される負荷回路、
受光素子に接続されるスイッチ回路、及び、
受光素子からの出力に応じてスイッチ回路を動作させるフィードバック回路、
を備え、
フィードバック回路は、遅延回路を有する、
測距装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/311,151 US20220026541A1 (en) | 2018-12-11 | 2019-11-15 | Photodetection device and distance measurement device |
| EP19897393.5A EP3896483A4 (en) | 2018-12-11 | 2019-11-15 | LIGHT DETECTOR AND DISTANCE MEASUREMENT DEVICE |
| CN201980074022.3A CN112997097B (zh) | 2018-12-11 | 2019-11-15 | 光检测设备和距离测量设备 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018-231363 | 2018-12-11 | ||
| JP2018231363A JP2020094849A (ja) | 2018-12-11 | 2018-12-11 | 光検出装置及び測距装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020121736A1 true WO2020121736A1 (ja) | 2020-06-18 |
Family
ID=71076318
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/044832 WO2020121736A1 (ja) | 2018-12-11 | 2019-11-15 | 光検出装置及び測距装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20220026541A1 (ja) |
| EP (1) | EP3896483A4 (ja) |
| JP (1) | JP2020094849A (ja) |
| CN (1) | CN112997097B (ja) |
| WO (1) | WO2020121736A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021251057A1 (ja) * | 2020-06-12 | 2021-12-16 | ソニーセミコンダクタソリューションズ株式会社 | 光検出回路および測距装置 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022061517A (ja) * | 2020-10-07 | 2022-04-19 | ソニーセミコンダクタソリューションズ株式会社 | 受光素子、測距モジュール、および、受光素子の制御方法 |
| KR20220085619A (ko) | 2020-12-15 | 2022-06-22 | 삼성전자주식회사 | 비전 센서 및 이의 동작 방법 |
| JP2023106153A (ja) * | 2022-01-20 | 2023-08-01 | ソニーセミコンダクタソリューションズ株式会社 | 測距装置 |
| WO2024176708A1 (ja) * | 2023-02-20 | 2024-08-29 | ソニーセミコンダクタソリューションズ株式会社 | 光検出装置 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02503114A (ja) * | 1988-01-27 | 1990-09-27 | フィリップ、ハラルド | 光学的モーションセンサ |
| JPH1048338A (ja) * | 1996-05-20 | 1998-02-20 | Olympus Optical Co Ltd | 距離測定装置 |
| JP2002328170A (ja) * | 2001-05-01 | 2002-11-15 | Nikon Corp | 遅延回路、計時装置及びレーザ測距装置 |
| JP2009236650A (ja) * | 2008-03-27 | 2009-10-15 | Panasonic Electric Works Co Ltd | 発光装置およびそれを用いる空間情報検出装置 |
| JP2009236657A (ja) * | 2008-03-27 | 2009-10-15 | Panasonic Electric Works Co Ltd | 距離測定装置 |
| JP2014081254A (ja) | 2012-10-16 | 2014-05-08 | Toyota Central R&D Labs Inc | 光学的測距装置 |
| JP2015078953A (ja) * | 2013-10-18 | 2015-04-23 | 株式会社デンソー | レーダ装置 |
| JP2015081780A (ja) * | 2013-10-21 | 2015-04-27 | 本田技研工業株式会社 | 距離測定システム及び補正用データの取得方法 |
| JP2016211881A (ja) * | 2015-04-30 | 2016-12-15 | 株式会社デンソー | 光飛行時間測定装置及び光学的測距装置 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000077705A (ja) * | 1998-08-31 | 2000-03-14 | Sony Corp | 受光装置 |
| US6842232B2 (en) * | 2002-11-04 | 2005-01-11 | Reza Miremadi | Electro-optical determination of target parameters |
| JP2010286814A (ja) * | 2009-05-12 | 2010-12-24 | Sony Corp | 表示装置、光検出方法、電子機器 |
| JP2011141418A (ja) * | 2010-01-07 | 2011-07-21 | Sony Corp | 表示装置、光検出方法、電子機器 |
| US8653435B2 (en) * | 2010-09-06 | 2014-02-18 | King Abdulaziz City Science And Technology | Time-delay integration imaging method and apparatus using a high-speed in-pixel analog photon counter |
| US9024246B2 (en) * | 2011-12-19 | 2015-05-05 | Princeton Lightwave, Inc. | Two-state negative feedback avalanche diode having a control element for determining load state |
| US9036383B2 (en) * | 2012-09-19 | 2015-05-19 | Fuji Electric Co., Ltd. | Power supply device control circuit |
| US9313476B2 (en) * | 2014-08-07 | 2016-04-12 | Omnivision Technologies, Inc. | Precharged latched pixel cell for a time of flight 3D image sensor |
| CN105181132B (zh) * | 2015-08-10 | 2017-06-23 | 湘潭大学 | 一种用于三维成像芯片的像素电路 |
| US11255663B2 (en) * | 2016-03-04 | 2022-02-22 | May Patents Ltd. | Method and apparatus for cooperative usage of multiple distance meters |
| US10291895B2 (en) * | 2016-10-25 | 2019-05-14 | Omnivision Technologies, Inc. | Time of flight photosensor |
| JP6696695B2 (ja) * | 2017-03-16 | 2020-05-20 | 株式会社東芝 | 光検出装置およびこれを用いた被写体検知システム |
| JP6957949B2 (ja) * | 2017-04-12 | 2021-11-02 | 株式会社デンソー | 光検出器 |
| US11467286B2 (en) * | 2018-02-13 | 2022-10-11 | Sense Photonics, Inc. | Methods and systems for high-resolution long-range flash lidar |
| CN108681362B (zh) * | 2018-04-25 | 2020-06-02 | 东南大学 | 一种阵列单光子雪崩光电二极管增益自适应调节电路 |
| JP2020024138A (ja) * | 2018-08-07 | 2020-02-13 | ソニーセミコンダクタソリューションズ株式会社 | 時間計測デバイスおよび時間計測装置 |
-
2018
- 2018-12-11 JP JP2018231363A patent/JP2020094849A/ja active Pending
-
2019
- 2019-11-15 EP EP19897393.5A patent/EP3896483A4/en active Pending
- 2019-11-15 US US17/311,151 patent/US20220026541A1/en active Pending
- 2019-11-15 CN CN201980074022.3A patent/CN112997097B/zh active Active
- 2019-11-15 WO PCT/JP2019/044832 patent/WO2020121736A1/ja unknown
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02503114A (ja) * | 1988-01-27 | 1990-09-27 | フィリップ、ハラルド | 光学的モーションセンサ |
| JPH1048338A (ja) * | 1996-05-20 | 1998-02-20 | Olympus Optical Co Ltd | 距離測定装置 |
| JP2002328170A (ja) * | 2001-05-01 | 2002-11-15 | Nikon Corp | 遅延回路、計時装置及びレーザ測距装置 |
| JP2009236650A (ja) * | 2008-03-27 | 2009-10-15 | Panasonic Electric Works Co Ltd | 発光装置およびそれを用いる空間情報検出装置 |
| JP2009236657A (ja) * | 2008-03-27 | 2009-10-15 | Panasonic Electric Works Co Ltd | 距離測定装置 |
| JP2014081254A (ja) | 2012-10-16 | 2014-05-08 | Toyota Central R&D Labs Inc | 光学的測距装置 |
| JP2015078953A (ja) * | 2013-10-18 | 2015-04-23 | 株式会社デンソー | レーダ装置 |
| JP2015081780A (ja) * | 2013-10-21 | 2015-04-27 | 本田技研工業株式会社 | 距離測定システム及び補正用データの取得方法 |
| JP2016211881A (ja) * | 2015-04-30 | 2016-12-15 | 株式会社デンソー | 光飛行時間測定装置及び光学的測距装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3896483A4 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021251057A1 (ja) * | 2020-06-12 | 2021-12-16 | ソニーセミコンダクタソリューションズ株式会社 | 光検出回路および測距装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220026541A1 (en) | 2022-01-27 |
| CN112997097A (zh) | 2021-06-18 |
| JP2020094849A (ja) | 2020-06-18 |
| CN112997097B (zh) | 2024-08-20 |
| EP3896483A4 (en) | 2022-01-26 |
| EP3896483A1 (en) | 2021-10-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7246863B2 (ja) | 受光装置、車両制御システム及び測距装置 | |
| WO2020121736A1 (ja) | 光検出装置及び測距装置 | |
| WO2018003227A1 (ja) | 測距装置および測距方法 | |
| WO2020022137A1 (ja) | 受光装置及び測距装置 | |
| WO2021111766A1 (ja) | 受光装置及び受光装置の制御方法、並びに、測距装置 | |
| WO2021124762A1 (ja) | 受光装置及び受光装置の制御方法、並びに、測距装置 | |
| WO2020137755A1 (ja) | 測距装置及び測距方法 | |
| JP2021128084A (ja) | 測距装置および測距方法 | |
| JP7511562B2 (ja) | 受光装置及び受光装置の制御方法、並びに、測距装置 | |
| WO2021192770A1 (ja) | 受光装置及び測距装置 | |
| WO2020153182A1 (ja) | 光検出装置及び光検出装置の駆動方法、並びに、測距装置 | |
| WO2021053958A1 (ja) | 受光装置、並びに、測距装置及び測距装置の制御方法 | |
| JP7407734B2 (ja) | 光検出装置及び光検出装置の制御方法、並びに、測距装置 | |
| WO2024162109A1 (ja) | 光検出装置及び測距システム | |
| WO2024095625A1 (ja) | 測距装置および測距方法 | |
| US20230106211A1 (en) | Distance measuring device and distance measuring method | |
| JP2023066297A (ja) | 光検出装置および測距システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19897393 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2019897393 Country of ref document: EP Effective date: 20210712 |