WO2020080065A1 - 測距装置、カメラ、及び測距装置の駆動調整方法 - Google Patents
測距装置、カメラ、及び測距装置の駆動調整方法 Download PDFInfo
- Publication number
- WO2020080065A1 WO2020080065A1 PCT/JP2019/038221 JP2019038221W WO2020080065A1 WO 2020080065 A1 WO2020080065 A1 WO 2020080065A1 JP 2019038221 W JP2019038221 W JP 2019038221W WO 2020080065 A1 WO2020080065 A1 WO 2020080065A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- charge
- signal
- circuit
- gate
- region
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 40
- 238000009826 distribution Methods 0.000 claims abstract description 156
- 238000009825 accumulation Methods 0.000 claims abstract description 112
- 238000004364 calculation method Methods 0.000 claims abstract description 44
- 238000003199 nucleic acid amplification method Methods 0.000 claims abstract description 44
- 230000003321 amplification Effects 0.000 claims abstract description 43
- 238000007599 discharging Methods 0.000 claims abstract description 43
- 238000003860 storage Methods 0.000 claims description 189
- 239000003990 capacitor Substances 0.000 claims description 90
- 238000012546 transfer Methods 0.000 claims description 51
- 238000003384 imaging method Methods 0.000 claims description 28
- 238000005259 measurement Methods 0.000 claims description 20
- 230000003287 optical effect Effects 0.000 claims description 20
- 238000001514 detection method Methods 0.000 claims description 4
- 238000012545 processing Methods 0.000 description 40
- 238000006243 chemical reaction Methods 0.000 description 37
- 238000010586 diagram Methods 0.000 description 32
- 230000000875 corresponding effect Effects 0.000 description 28
- 230000006698 induction Effects 0.000 description 27
- 239000010408 film Substances 0.000 description 24
- 230000005684 electric field Effects 0.000 description 19
- 238000013500 data storage Methods 0.000 description 18
- 230000002093 peripheral effect Effects 0.000 description 16
- 238000009792 diffusion process Methods 0.000 description 15
- 238000005516 engineering process Methods 0.000 description 14
- 230000015654 memory Effects 0.000 description 14
- 230000008859 change Effects 0.000 description 12
- 239000004065 semiconductor Substances 0.000 description 12
- 230000004044 response Effects 0.000 description 11
- 238000012986 modification Methods 0.000 description 10
- 238000012937 correction Methods 0.000 description 9
- 230000003111 delayed effect Effects 0.000 description 8
- 239000000758 substrate Substances 0.000 description 8
- 230000008569 process Effects 0.000 description 7
- 239000000872 buffer Substances 0.000 description 6
- 230000006870 function Effects 0.000 description 6
- 230000004048 modification Effects 0.000 description 6
- 229910021420 polycrystalline silicon Inorganic materials 0.000 description 6
- 239000010409 thin film Substances 0.000 description 6
- 230000001276 controlling effect Effects 0.000 description 5
- 230000007423 decrease Effects 0.000 description 5
- 230000007613 environmental effect Effects 0.000 description 5
- 230000006399 behavior Effects 0.000 description 4
- 239000004020 conductor Substances 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 230000001052 transient effect Effects 0.000 description 4
- 239000012535 impurity Substances 0.000 description 3
- 229920006395 saturated elastomer Polymers 0.000 description 3
- 238000009413 insulation Methods 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 238000005036 potential barrier Methods 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 101000936513 Loxosceles boneti Dermonecrotic toxin LbSicTox-betaIA1a Proteins 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 230000014509 gene expression Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
Images























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4861—Circuits for detection, sampling, integration or read-out
- G01S7/4863—Detector arrays, e.g. charge-transfer gates
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L27/00—Devices consisting of a plurality of semiconductor or other solid-state components formed in or on a common substrate
- H01L27/14—Devices consisting of a plurality of semiconductor or other solid-state components formed in or on a common substrate including semiconductor components sensitive to infrared radiation, light, electromagnetic radiation of shorter wavelength or corpuscular radiation and specially adapted either for the conversion of the energy of such radiation into electrical energy or for the control of electrical energy by such radiation
- H01L27/144—Devices controlled by radiation
- H01L27/146—Imager structures
- H01L27/14601—Structural or functional details thereof
- H01L27/14609—Pixel-elements with integrated switching, control, storage or amplification elements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C3/00—Measuring distances in line of sight; Optical rangefinders
- G01C3/02—Details
- G01C3/06—Use of electric means to obtain final indication
- G01C3/08—Use of electric radiation detectors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/10—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves
- G01S17/18—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves wherein range gates are used
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
- G01S17/894—3D imaging with simultaneous measurement of time-of-flight at a 2D array of receiver pixels, e.g. time-of-flight cameras or flash lidar
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4816—Constructional features, e.g. arrangements of optical elements of receivers alone
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4865—Time delay measurement, e.g. time-of-flight measurement, time of arrival measurement or determining the exact position of a peak
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/487—Extracting wanted echo signals, e.g. pulse detection
- G01S7/4876—Extracting wanted echo signals, e.g. pulse detection by removing unwanted signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/497—Means for monitoring or calibrating
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/50—Control of the SSIS exposure
- H04N25/53—Control of the integration time
- H04N25/531—Control of the integration time by controlling rolling shutters in CMOS SSIS
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/71—Charge-coupled device [CCD] sensors; Charge-transfer registers specially adapted for CCD sensors
- H04N25/75—Circuitry for providing, modifying or processing image signals from the pixel array
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/76—Addressed sensors, e.g. MOS or CMOS sensors
Definitions
- the present invention relates to a distance measuring device such as a distance measuring element and a 3D image pickup device, and more particularly to a distance measuring device using a CMOS image sensor (CIS) or pixels of this CIS, a camera equipped with this distance measuring device, and a distance measuring device.
- the present invention relates to a drive adjustment method.
- CCD image sensor CCD
- the time-of-flight (TOF) type has high distance accuracy, has a wide measurable distance range, and distance calculation is relatively easy.
- the TOF type 3D imaging element mainly includes a continuous wave modulation (CW) type and an optical pulse synchronization type. Both of the CW type and the optical pulse type have a structure in which a plurality of charge distribution gates are added to a photodetector such as a photodiode (PD), and the lock-in in which the plurality of charge distribution gates are repeatedly turned on / off. It is driving.
- CW continuous wave modulation
- optical pulse synchronization type Both of the CW type and the optical pulse type have a structure in which a plurality of charge distribution gates are added to a photodetector such as a photodiode (PD), and the lock-in in which the plurality of charge distribution gates are repeatedly turned on / off. It is driving.
- PD photodiode
- the TOF type 3D imaging element generally uses infrared light as signal light, and in order to remove ambient light (background light), it is generally used by cutting light other than signal light as much as possible using a bandpass filter or the like. Target. However, it is very difficult to remove all ambient light.
- a 3-branch lock-in pixel called a 3-tap lock-in pixel, one charge distribution gate that distributes charges first among the three charge distribution gates is used exclusively for removing ambient light. Since it has a high ability to remove ambient light, it is suitable for use in environments where the influence of ambient light is significant, such as outdoors and in bright rooms.
- the broken line in FIG. 10 is the result of examining the relationship between the actual distance from the image sensor to the subject and the distance measurement data according to the method of the invention described in Patent Document 1. It can be seen that in the conventional 3-branch type lock-in pixel, the linearity is beginning to deteriorate from an actual distance of about 3 m.
- the present invention provides a distance measuring device with improved linearity of a distant view and an increased distance measuring range, a camera equipped with the distance measuring device, and a drive adjusting method of the distance measuring device.
- the purpose is to
- a first aspect of the present invention includes (a) a light emitting unit that projects an optical pulse onto an object, (b) a light receiving region that receives reflected light of an optical pulse from the object, and (c) N is 3 or more. Is a positive integer of N, the signal charges photoelectrically converted in the light receiving area are sequentially transferred and transferred along the N charge transfer paths, and (d) charges other than the signal charges are received in the light receiving area.
- a charge discharging gate for discharging from (1), (e) N charge accumulating regions for accumulating the signal charges transferred along the N charge distributing gates, and (f) supplying a control signal to the light emitting unit, And a drive circuit that sequentially supplies a drive signal to each of the N charge distribution gates and the charge discharge gates, and (g) a read amplification circuit that independently reads the signal charges accumulated in the N charge accumulation regions, (h) Input a signal that has passed through the readout amplifier circuit and perform calculations including calculation of the distance to the target object.
- a signal that sequentially expands the charge storage time assigned to a specific charge distribution gate among the N charge distribution gates is generated from the logic operation circuit to be applied and (i) the value output from the logic operation circuit.
- the gist of the present invention is that it is a distance measuring device including a control arithmetic circuit that supplies the driving circuit.
- a second aspect of the present invention provides (p) an imaging optical system, (q) a light emitting unit that projects an optical pulse onto an object, and (r) a reflected light of the optical pulse from the object via the imaging optical system.
- Light-receiving region for receiving light N charge distribution gates for sequentially transferring and transferring signal charges photoelectrically converted in the light-receiving region with N being a positive integer of 3 or more along N charge transfer paths, and charges other than signal charges Are discharged from the light receiving region, N charge accumulation regions for accumulating the signal charges transferred along the N charge distribution gates, respectively, and a control signal is supplied to the light emitting portion and N charge distribution gates are provided.
- a solid-state imaging device that integrates a drive circuit that sequentially supplies a drive signal to each of the division gate and the charge discharge gate, and (s) controls the imaging optical system and inputs a signal that has passed through a read amplification circuit to the target object.
- a logical operation circuit for performing an operation including calculation of a distance of ) A control operation circuit that generates a signal that sequentially extends the charge accumulation time assigned to a specific charge distribution gate among the N charge distribution gates from the value output by the logic operation circuit and supplies the signal to the drive circuit
- the gist is that the camera has.
- a third aspect of the present invention is a light emitting unit that projects a light pulse on an object, a light receiving area that receives reflected light of an optical pulse from the object, N is a positive integer of 3 or more, and photoelectric conversion is performed in the light receiving area.
- N charge distribution gates that sequentially distribute and transfer the signal charges along the N charge transfer paths, the charge discharge gates that discharge charges other than the signal charges from the light receiving region, and the N charge distribution gates.
- a drive circuit that supplies a control signal to the N charge storage regions and the light emitting unit that respectively store the transferred signal charges, and sequentially supplies a drive signal to each of the N charge distribution gates and the charge discharge gates.
- the present invention relates to a drive adjustment method for a distance measuring device that includes a read amplifier circuit that reads out the signal charges accumulated in each charge accumulation region independently.
- the drive adjustment method according to the third aspect of the present invention includes (u) a step of inputting a signal that has passed through a read amplification circuit and performing a calculation including calculation of a distance to an object, and (v) a result of the calculation. , N of the charge distribution gates, a step of generating a signal for sequentially extending the charge accumulation time assigned to a specific charge distribution gate and supplying the signal to the drive circuit.
- the present invention it is possible to provide a distance measuring device in which linearity of a distant view is improved and a distance measuring range is expanded, a camera equipped with this distance measuring device, and a drive adjusting method of the distance measuring device.
- FIG. 3 is a logical block diagram for explaining an internal structure of a control arithmetic circuit included in a peripheral circuit of the distance measuring apparatus according to the first embodiment as a hardware resource. It is a top view explaining the outline of the structure of the three-branch type pixel of the ranging device concerning a 1st embodiment.
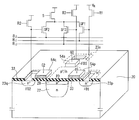
- FIG. 4 is a cross-sectional view seen from the IV-IV direction in FIG. 3.
- 3 is a flowchart illustrating an outline of a flow of an adjusting operation by a peripheral circuit of the distance measuring apparatus according to the first embodiment, centered on the control arithmetic circuit shown in FIG. 1.
- FIG. 3 is a flowchart illustrating an outline of a flow of an adjusting operation by a peripheral circuit of the distance measuring apparatus according to the first embodiment, centered on the control arithmetic circuit shown in FIG. 1.
- FIG. 6 is a drive timing diagram illustrating an operation when adjusting the distance measuring device according to the first embodiment.
- FIG. 6 is a drive timing diagram illustrating an operation when adjusting the distance measuring device according to the first embodiment.
- 9 is a flowchart illustrating an outline of an adjusting operation by a peripheral circuit of the distance measuring device according to the reference technique studied before reaching the present invention.
- FIG. 11 is a drive timing diagram illustrating an operation when adjusting the distance measuring device according to the reference technology.
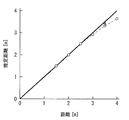
- 6 is a graph showing a relationship between an actual distance and a distance measurement value by the distance measuring device according to the reference technology and the distance measuring device according to the first embodiment of the present invention. It is sectional drawing explaining the behavior of the photoelectron which causes the problem of the ranging device concerning a reference technique.
- FIG. 13A is a graph showing the change in the output of G 3 with respect to the charge accumulation time by the distance measuring device according to the first embodiment
- FIG. 13B is the charge accumulation time corresponding to FIG. 13A
- 6 is a graph showing the amount of change (differential) in the output of G 3 with respect to It is a wave form diagram explaining the distance measuring apparatus which concerns on 2nd Embodiment. 6 is a flowchart illustrating an outline of a flow of an adjusting operation by a peripheral circuit of the distance measuring apparatus according to the second embodiment, centering on the control arithmetic circuit shown in FIG. 1.
- FIG. 13A is a graph showing the change in the output of G 3 with respect to the charge accumulation time by the distance measuring device according to the first embodiment
- FIG. 13B is the charge accumulation time corresponding to FIG. 13A
- 6 is a graph showing the amount of change (differential) in the output of G 3 with respect to It is a wave form diagram explaining the distance measuring apparatus which concerns on 2nd Embodiment.
- FIG. 9 is a drive timing diagram for explaining an operation when adjusting the distance measuring device according to the second embodiment. It is a wave form diagram explaining the distance measuring device which concerns on 3rd Embodiment. It is a flow chart explaining an outline of a flow of adjustment operation by a peripheral circuit of a distance measuring device concerning a 3rd embodiment.
- FIG. 11 is a drive timing chart for explaining an operation when adjusting the distance measuring device according to the third embodiment. It is a drive timing diagram explaining operation
- FIG. 22B shows the operation when adjusting the distance measuring apparatus according to the modification of the fourth embodiment, as compared with the drive timing chart according to the fourth embodiment shown in FIG.
- FIG. 6 is a drive timing chart to be described. It is sectional drawing which shows the structure which paid its attention to the photoelectric conversion transfer part of the pixel of the distance measuring device which concerns on the modification of 4th Embodiment.
- FIG. 24B is a drive timing chart for explaining the operation when adjusting the distance measuring apparatus according to the modification of the fourth embodiment, as compared with the drive timing chart according to the reference technique shown in FIG. It is a timing diagram. It is a top view of the principal part of the pixel of the distance measuring device which concerns on 5th Embodiment.
- the first to sixth embodiments exemplify devices and methods for embodying the technical idea of the present invention.
- the technical idea of the present invention is based on the configuration of circuit elements and circuit blocks.
- the layout, the layout on the semiconductor chip, and the like are not specified below.
- the technical idea of the present invention can be variously modified within the technical scope defined by the claims described in the claims.
- the first conductivity type is p-type and the second conductivity type is n-type.
- the first conductivity type is n-type and the second conductivity type is p-type. It can be easily understood that the same effect can be obtained by reversing the electric polarities of the molds. In this case, it goes without saying that the high level and the low level of the pulse waveform may need to be appropriately inverted depending on the common general knowledge of those skilled in the art.
- a distance measuring device based on a 3D image pickup device in which a plurality of pixels (distance measuring elements) are arranged in a two-dimensional matrix in a pixel array portion is shown for convenience of description, but it is merely an example. Not too much.
- a line sensor layout in which distance measuring elements are one-dimensionally arranged as pixels in the pixel array unit may be used.
- the distance sensor may have a simple structure in which only a single distance measuring element is arranged in the pixel array section.
- the distance measuring apparatus includes a pixel array section (X 11 to X 1m ; X 21 to X 2m ; ...; X n1 to X nm ) and peripheral circuits. It is based on a two-dimensional image sensor (3D image pickup device) in which the parts (71, 72, 74 to 77, 94 to 96, NC1 to NCm) are integrated on the same semiconductor chip.
- a two-dimensional image sensor (3D image pickup device) in which the parts (71, 72, 74 to 77, 94 to 96, NC1 to NCm) are integrated on the same semiconductor chip.
- M and n are positive integers of 2 or more, respectively), and form a rectangular imaging region.
- a driving circuit 94 is provided on the upper side of the pixel array section (X 11 to X 1m ; X 21 to X 2m ; ...; X n1 to X nm ) and a horizontal shift register 96 is provided on the lower side. Rows X 11 to X 1m ; X 21 to X 2m ; ...; are provided along the X n1 to X nm direction, and pixel columns X 11 to X n1 ; X 12 to X n2 ; are provided on the right side of the pixel array section.
- the drive circuit 94 is connected to a light emitting unit 91 which serves as a distance measuring element for each pixel X ij and projects the light required for distance measurement as a pulse signal repeatedly.
- a control signal for controlling the drive circuit 94 is transmitted from the control arithmetic circuit (CPU) 74 to the drive circuit 94 via the interface 76.
- the control arithmetic circuit 74 includes a program storage device 77 that stores a program for instructing a series of operations in the control arithmetic circuit 74, and a data storage that stores data, threshold values, etc. necessary for logical operation in the control arithmetic circuit 74.
- the device 72 is connected.
- the control arithmetic circuit 74 is further connected to an output section 75 for outputting the result of the logical operation in the control arithmetic circuit 74.
- Output signals from the pixel array units (X 11 to X 1m ; X 21 to X 2m ; ...; X n1 to X nm ) are input to the data storage device 72 via the output buffers 97 and 98, and the range image is displayed.
- a logical operation circuit 71 is connected to perform an operation including calculation of a distance to an object required for forming the object. Note that, in FIG. 1, as schematically illustrated as an internal structure of the pixel X n1 as a block diagram, each pixel X ij has a signal generation unit 81 including a photoelectric conversion element and a signal charge transfer unit, and a source follower type pixel.
- a read amplifier circuit 82 and the like are included.
- the logical operation circuit 71 uses the equation (5), which will be described later, in addition to the operation of calculating the dark-time equivalent output from the signal measured immediately before, and uses the target object 92 and the pixel array units (X 11 to X 11 ) shown in FIG. 1 m ; X 21 to X 2m ; ...; X n1 to X nm ) and the calculation of the estimated distance L.
- FIG. 1 shows a structure in which the logical operation circuit 71, the interface 76, the control operation circuit 74, the program storage device 77, the data storage device 72, and the output unit 75 are integrated on the same semiconductor chip, this is merely an example. Nothing more than.
- the logic operation circuit 71, the interface 76, the control operation circuit 74, the program storage device 77, the data storage device 72, and at least a part of the circuits of the output unit 75 are separate chips. Alternatively, it may be mounted on a substrate.
- the signal reading from each of the pixels X 11 to X 1m ; X 21 to X 2m ; ...; X n1 to X nm as a distance measuring element is almost the same as that of a normal CMOS image sensor.
- the third drive signal G 3 is simultaneously given to all the pixels X 11 to X 1m ; X 21 to X 2m ; ...; X n1 to X nm from the drive circuit 94, and since it is a high frequency signal, Switching noise occurs during the period. Therefore, signal reading from the pixel portion is performed by providing a reading period after the processing by the noise processing circuits NC1 to NCm is completed.
- the control arithmetic circuit 74 includes a time setting logic circuit 741, a time set value output control circuit 742, a distance image output control circuit 743, a set value determination circuit 744, and a sequence control circuit 745 as hardware.
- the time setting logic circuit 741 sets the values of the light projection time T o and the first charge storage time T a1 , the second charge storage time T a2 , and the third charge storage time T a3 shown in FIG.
- the time setting logic circuit 741 causes the light projection time T o, the first charge accumulation time T a1 , the second charge accumulation time T a2 , and the third charge accumulation time T a1 shown in FIG. This is a logic circuit that appropriately changes the value of the charge storage time T a3 and the like.
- the time setting logic circuit 741 determines that the first drive signal G 1 , the second drive signal G 2 , and the third drive signal G 3 applied to the transfer gate have different timings with an offset time therebetween, as shown in FIG. Set the time so that
- Time setting value output control circuit 742 the repetition period time T c which is set or change the time setting logic circuit 741, the light projection time T o, the first charge accumulation time T a1, the second charge accumulation time T a2, third charge It is a logic circuit that outputs the accumulation time T a3 , the charge transfer time T on, etc. to the drive circuit 94 via the interface 76 as a control signal.
- the distance image output control circuit 743 is a logic circuit which, when the set value determination circuit 744 determines OK, synthesizes the detected value of the distance calculated by the logical operation circuit 71 as the data of the distance image and outputs the data to the output unit 75. .
- the set value determination circuit 744 is the difference between the detected value of the dark equivalent output or distance measured and calculated by the logical operation circuit 71 immediately before, and the detected value of the dark equivalent output or distance measured and calculated at the timing before that. Is a logic circuit that determines whether or not it falls below a threshold value previously stored in the data storage device 72, and outputs the determination result to the time setting logic circuit 741 or the distance image output control circuit 743.
- the sequence control circuit 745 clocks the respective operations of the time setting logic circuit 741, the time set value output control circuit 742, the distance image output control circuit 743, the set value determination circuit 744, the interface 76, the program storage device 77, and the data storage device 72. It is a logic circuit that sequentially controls the sequence depending on a signal. Each of the time setting logic circuit 741, the time setting value output control circuit 742, the distance image output control circuit 743, the setting value determination circuit 744, and the sequence control circuit 745 can send and receive information via the bus 736.
- the data storage device 72 includes a group of registers, a plurality of cache memories, a main storage device, and an auxiliary storage device. It is also possible to make an arbitrary combination appropriately selected from the above. Further, the cache memory may be a combination of a primary cache memory and a secondary cache memory, and may further have a hierarchy including a tertiary cache memory. Although not shown, the bus 736 may be extended to the interface 76, the program storage device 77, the data storage device 72, and the like when the data storage device 72 includes a plurality of registers.
- the control arithmetic circuit 74 shown in FIG. 2 can configure a computer system using a microprocessor (MPU) mounted as a microchip.
- MPU microprocessor
- DSP digital signal processor
- a microcontroller that is equipped with a memory and peripheral circuits for the purpose of controlling embedded equipment ( Microcomputer) etc.
- the main CPU of the current general-purpose computer may be used for the control arithmetic circuit 74.
- control arithmetic circuit 74 may be configured by a programmable logic device (PLD) such as a field programmable gate array (FPGA).
- PLD programmable logic device
- FPGA field programmable gate array
- the data storage device 72 can be configured as a memory element such as a memory block included in a part of the logic block configuring the PLD.
- the control arithmetic circuit 74 may have a structure in which a CPU core-like array and a PLD-like programmable core are mounted on the same chip.
- This CPU-core-like array includes a hard macro CPU pre-installed inside the PLD and a soft macro CPU configured using PLD logic blocks. That is, a configuration in which software processing and hardware processing are mixed inside the PLD may be used.
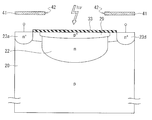
- FIG. 4 shows an example of a sectional structure of the plane structure shown in FIG.
- FIG. 4 is a cross-sectional view as seen from the IV-IV direction of the layout diagram of FIG.
- the gates (32a, 32b), the third charge distribution gates (33a, 33b) and the charge discharging gates (34a, 34b) are connected as an electric field control electrode pair.
- the first charge distribution gate (31a, 31b), the second charge distribution gate (32a, 32b), the third charge distribution gate (33a, 33b) and the charge discharge gate (34a, 34b) receive light.
- the first charge storage region 23a, the second charge storage region 23b, the third charge storage region 23c, and the charge discharge region 23d are diagonally aligned on the gate insulating film 33 from the center position of the light receiving region.
- the light receiving region of the photoelectric conversion element receives the pulsed light that has entered through the opening 42 of the light shielding film 41 as an optical signal, converts this optical signal into a signal charge, and outputs the first charge distribution gate (31a). , 31b), the second charge distribution gates (32a, 32b), and the third charge distribution gates (33a, 33b).
- a functional base layer made of a p-type semiconductor is provided in a portion that functions as the signal generation unit 81 in the pixel of the distance measuring apparatus according to the first embodiment. 20, an n-type surface-embedded region 22 provided in a part of the upper portion of the functional substrate layer 20, and a photoelectric conversion including a p + -type pinning layer 29 provided in contact with the surface of the surface-embedded region 22.
- the region (29, 22) and the gate insulating film 33 provided on the photoelectric conversion region (29, 22) are included.
- the central portion of the photoelectric conversion area (29, 22) is used as a light receiving area.
- n having a higher impurity density than that of the functional base layer 20 is provided so as to surround the light receiving region and to be spaced apart from each other at four positions symmetrical with respect to the center position of the light receiving region.
- a + type first charge storage region 23a, a second charge storage region 23b, a third charge storage region 23c, and a charge discharge region 23d are provided.
- the first charge distribution gates (31a, 31b) of the photoelectric conversion elements forming each pixel are hook-shaped (hook-shaped) first electrostatic induction electrodes 31a and hook-shaped second electrostatic induction electrodes.
- 31b is an electrode pair (electric field control electrode pair) in which a charge transfer path extending diagonally with 31b is sandwiched between them to face each other.
- the second charge distribution gate (32a, 32b) has a hook-shaped third electrostatic induction electrode 32a and a hook-shaped fourth electrostatic induction electrode 32b, and a charge transfer path extending diagonally downward to the left. It is an electrode pair that is sandwiched in an island shape and faces each other.
- the third charge distribution gates (33a, 33b) form a charge transfer path extending diagonally in the upper right direction between the hook-shaped fifth electrostatic induction electrode 33a and the hook-shaped sixth electrostatic induction electrode 33b. , Electrode pairs that are sandwiched in an island shape and face each other.
- the charge discharge gates (34a, 34b) have a hook-shaped seventh electrostatic induction electrode 34a and a hook-shaped eighth electrostatic induction electrode 34b that extend diagonally to the lower right and have charge transfer paths that are island-shaped. It is a pair of electrodes that are sandwiched between and face each other.
- the arrangement topology of the first charge storage region 23a, the second charge storage region 23b, the third charge storage region 23c, and the charge discharge region 23d has a four-fold rotational symmetry with respect to the center position of the light receiving region.
- the pixel of the distance measuring apparatus according to the first embodiment further includes an n-type charge discharging auxiliary region 27a, which has a higher impurity density than the functional base layer 20 in the peripheral portion surrounding the light receiving region.
- 27b, 27c, and 27d are provided apart from each other.
- the first electrostatic induction electrode 31a and the second electrostatic induction electrode 31b are arranged opposite to each other in a mirror image relationship on both sides of the charge transfer path toward the first charge storage region 23a.
- the third electrostatic induction electrode 32a and the fourth electrostatic induction electrode 32b are arranged opposite to each other in a mirror image relationship on both sides of the charge transfer path toward the second charge storage region 23b.
- the fifth electrostatic induction electrode 33a and the sixth electrostatic induction electrode 33b are arranged opposite to each other in a mirror image relationship on both sides of the charge transfer path toward the third charge storage region 23c.
- the seventh electrostatic induction electrode 34a and the eighth electrostatic induction electrode 34b are arranged opposite to each other in a mirror image relationship on both sides of the charge transfer path toward the charge discharging region 23d.
- the pixels of the distance measuring apparatus each include a first charge distribution gate (31a, 31b) and a second charge distribution gate (31a, 31b) that form an electric field control electrode pair.
- 32a, 32b the third charge distribution gates (33a, 33b) and the charge discharge gates (34a, 34b), the first drive signal G 1 , the second drive signal G 2 , the third drive signal G 3 and discharge.
- the drive signal G D is periodically applied as an electric field control pulse, and the depletion potential of the surface-embedded region 22 is alternately changed, so that a potential gradient toward the direction in which charges are transported to one of the charge transfer paths.
- the transfer destinations of the signal charges generated and collected in the surface-embedded region 22 are the first charge accumulation region 23a, the second charge accumulation region 23b, the third charge accumulation region 23c, and the charge discharge region 23d. Sequentially set to either To control.
- the first drive signal G 1 of the first potential level used when setting the charge transfer path By applying a charge discharge pulse having a second potential level larger than the second drive signal G 2 , the third drive signal G 3 , and the discharge drive signal G D to the first charge distribution gate (31a, 31b), It is possible to discharge charges, which are noise current components for distance measurement due to background light (environmental light) or the like, to the charge discharge auxiliary region 27a and the fourth charge discharge auxiliary region 27d.
- the distance is measured to the second charge discharging auxiliary region 27b and the first charge discharging auxiliary region 27a. Can be discharged as a noise current component with respect to.
- the charge discharging pulse of the second potential level is applied to the third charge distribution gates (33a, 33b)
- the third charge discharging auxiliary region 27c and the fourth charge discharging auxiliary region 27d are used for distance measurement. It is possible to discharge the electric charge that becomes the noise current component.
- a noise current component for distance measurement is generated in the second charge discharging auxiliary region 27b and the third charge discharging auxiliary region 27c. Can be discharged.
- the voltage of the first drive signal G 1 , the second drive signal G 2 , the third drive signal G 3 , and the discharge drive signal G D is 2.0 V
- the voltage of the second potential level as the charge discharge pulse is It may be set to about 5V.
- the charge transfer path is set so as to form an X-shape that crosses each other at the center of the light receiving area.
- the distribution gates (33a, 33b) and the charge discharge gates (34a, 34b) the photoelectrons generated in the light receiving region can be accelerated in four directions of X shape by electric field control along the charge transfer path forming the X type.
- the charge modulation can be carried out by moving to.
- FIG. 5 is a flowchart showing an outline of an operation related to the control arithmetic circuit 74 of the distance measuring apparatus according to the first embodiment shown in FIG. 1, and FIGS. 6 and 7 are flowcharts shown in FIG. It is the figure which illustrated the drive timing diagram which a drive method changes according to the program used as a flow.
- FIG. 6 is a drive timing chart for explaining the operation at the time of adjustment of the distance measuring apparatus according to the first embodiment.
- the third charge storage time T a3 is shifted according to the value.
- the ON time of the discharge drive signal G D given to the charge discharge gates (34a, 34b) is longer than the pulses of the first drive signal G 1 , the second drive signal G 2 , and the third drive signal G 3 .
- the period in which the pulse of the ejection drive signal G D is turned on / off is the repetition cycle time (T c ).
- the projection light is synchronized with the second charge accumulation time T a2 assigned to the pulse of the second drive signal G 2 in relation to the first drive signal G 1 .
- Distance measurement is performed in a region where received light is obtained during the second charge storage time T a2 assigned to the pulse of the second drive signal G 2 and the third charge storage time T a3 assigned to the pulse of the third drive signal G 3. it can.
- the discharge drive signal G D is a charge discharge gate (34a, 34a, for discharging photoelectrons so that the received light after the third charge accumulation time T a3 assigned to the pulse of the third drive signal G 3 does not become noise in the distance measurement. 34b).
- the first drive signal G 1 is a voltage of a pulse for eliminating (offseting) background light (environmental light), dark current, etc., and the first charge accumulation time T a1 after the discharge drive signal G D is pulsed is It is assigned.
- the effective signal charge Q1 alpha-ef. Transferred and accumulated in the charge accumulation region 23a is the third charge accumulation time in which ⁇ is assigned to the pulse of the third drive signal G 3 in relation to the first drive signal G 1.
- Q1 alpha-ef. ⁇ ⁇ Q1 (3) Given in.
- the distance measuring device according to the first embodiment is suitable for use in an environment where the influence of ambient light is great, such as outdoors or in a bright room.
- c is the speed of light
- T o is the light projection time of the pulse light (pulse width).
- a first auxiliary capacitor C1 and a first source follower amplification transistor SF1 are connected to the first charge storage region 23a via a surface wiring or the like.
- a second auxiliary capacitor C2 and a second source follower amplification transistor SF2 are provided in the second charge storage region 23b
- a third auxiliary capacitor C3 and a third source follower amplification transistor SF2 are provided in the third charge storage region 23c. It is connected to the transistor SF3.
- a power supply VDD is connected to the charge discharging area 23d.
- the set first charge accumulation time T a1 , the second charge accumulation time T a2 , and the third charge accumulation time T a3 are sent to the drive circuit 94 by the time set value output control circuit 742 via the interface 76 shown in FIG. Output as control signal.
- the light emitting section 91 emits pulsed light.
- a near infrared LD laser diode
- a near infrared LED is used.
- the pulsed light reflected by the object 92 passes through the lens 93, a BPF (bandpass filter), etc., and the pixel array section (X 11 to X 1m ; X 21 to X 2m ; ...; X n1 to X nm ) shown in FIG. ) Is irradiated.
- each pixel X ij of the pixel array section controls electrons (photoelectrons) generated by light reception. It operates according to the control signal given from the time setting logic circuit 741 of the arithmetic circuit 74 through the drive circuit 94, and sends the output signal to the logical arithmetic circuit 71 through the output buffer 97.98.
- step S102 the logical operation circuit 71 further sends the distance calculation and the additional operation result to the time setting logic circuit 741 of the control operation circuit 74.
- step S103 of FIG. 5 the time setting logic circuit 741 of the control calculation circuit 74 extends the third charge storage time T a3 .
- the set first charge accumulation time T a1 , the second charge accumulation time T a2 , and the third charge accumulation time T a3 are sent to the drive circuit 94 by the time set value output control circuit 742 via the interface 76 shown in FIG. Output again as a control signal.
- the pulsed light reflected from the light emitting section 91 on the target object 92 to be pulsed is reflected by the lens 93 or the BPF.
- the pixel array section (X 11 to X 1m ; X 21 to X 2m ; ...; X n1 to X nm ) shown in FIG.
- each pixel X ij of the pixel array section controls electrons generated by light reception to the control arithmetic circuit 74. It operates according to the control signal given from the time setting logic circuit 741 through the drive circuit 94, and sends the output signal to the logic operation circuit 71 through the output buffer 97.98.
- Logical operation circuit 71 in step S104 the pixel array portion in response to a signal output from each pixel X ij of (X 11 ⁇ X 1m; X 21 ⁇ X 2m;; ...... X n1 ⁇ X nm), the formula ( 5) is used to calculate the distance, the distance is measured, and the calculation result of the distance and the additional calculation result are sent again to the time setting logic circuit 741.
- the set value determination circuit 744 is one of the third signal charge Q3 corresponding to the dark time which is calculated and calculated by the logical operation circuit 71 immediately before in step S104, It is determined whether or not the difference in the third signal charge Q3 corresponding to the dark time measured and calculated at the previous timing falls below a threshold value stored in the data storage device 72 in advance.
- the difference between the detected value of the distance calculated and calculated immediately before by the logical operation circuit 71 in step S104 and the detected value of the distance measured and calculated one timing before step S104 is It is determined whether or not it falls below a threshold value previously stored in the data storage device 72.
- “corresponding to dark time” means eliminating the influence of ambient light by performing calculations using the equations (1) and (2).
- step S105 when the set value determination circuit 744 determines that the value does not fall below the threshold value (Yes), the data is passed to the time setting logic circuit 741 of the control calculation circuit 74.
- step S106 of FIG. 3 the time setting logic circuit 741 returns to step S104 after the time setting logic circuit 741 of the control arithmetic circuit 74 extends the third charge storage time T a3, and measures the distance again. After that, the loop processing of returning from step S104 to step S105 through step S106 and returning to step S104 is repeated until the set value determination circuit 744 determines that the value is below the threshold value (No) in step S105.
- FIG. 13A shows a change in the third signal charge Q3 corresponding to the dark time with respect to the third charge storage time T a3 at this time.
- the third signal charge Q3 corresponding to the dark time increases so as to approach the certain asymptotic value asymptotically.
- the distance image output control circuit 743 of the control calculation circuit 74 passes the data to the output unit 75, and the output signal is output from the output unit 75. The process shown in FIG. 5 ends.
- FIG. 8 is a flowchart showing an outline of the operation of the distance measuring device according to the reference technique examined by the present inventor before reaching the present invention.
- the reference technique shown in FIG. 8 is a technique for improving the problem of the conventional 3-branch lock-in pixel described in Patent Document 1 and the like.
- the reference technique also follows the processing of the control arithmetic circuit 74 having various logic circuits similar to the hardware resources shown in FIG.
- FIG. 9 is a drive timing chart corresponding to the flow of the flowchart shown in FIG.
- step S901 of FIG. 8 the time setting logic circuit 741 of the control arithmetic circuit 74 sets the light projection time T o to a maximum value. Subsequently, in step S902, the time setting logic circuit 741 sets the repetition cycle time T c to the maximum value.
- the set light projection time T o and repetition period time T c, time setting value output control circuit 742 outputs a control signal to the drive circuit 94 via the interface 76 shown in FIG.
- the light emitting section 91 emits pulsed light.
- the pulsed light reflected by the object 92 is applied to the pixel array section (X 11 to X 1m ; X 21 to X 2m ; ...; X n1 to X nm ) shown in FIG. 1 through the lens 93 and the BPF. .
- each pixel X ij of the pixel array unit responds to the control signal given from the time setting logic circuit 741 of the control arithmetic circuit 74 through the drive circuit 94 to the electron (photoelectron) generated by the light reception. And outputs an output signal to the logical operation circuit 71 via the output buffer 97.98.
- the first drive signal G 1 , the second drive signal G 2 , the third drive signal G 3 , and the discharge drive signal G D are applied at different timings with an offset time in between.
- a first charge distribution gate (31a, 31b) and a second charge distribution gate (32a, 32b), a third charge distribution gate (33a, 33b), and a charge discharge gate, each of which is an electric field control electrode pair. Due to the difference in the signal charge passing through the charge transfer path defined between (34a, 34b), the logical operation circuit 71 executes the operation of calculating the distance using the equation (5) with ⁇ 1 in the equation (3). To do. In step S903, the logic operation circuit 71 further sends the calculation result of the distance calculation to the time setting logic circuit 741 of the control calculation circuit 74.
- step S904 of FIG. 8 the set value determination circuit 744 of the control operation circuit 74 determines whether or not the drive setting is appropriate for the operation result of the distance calculation output from the logical operation circuit 71. If the set value determination circuit 744 determines YES in step S904, the data is passed to the time setting logic circuit 741 of the control calculation circuit 74. Time setting logic 741, in step S905 of FIG. 8, to reduce the light projection time T o. Subsequently, in step S906, the time setting logic circuit 741 shortens the repetition cycle time T c .
- Is shortened light projection time T o and repetition period time T c is the control signal driving method has been changed, via the drive circuit 94 shown in FIG. 1, it is passed to the light-emitting unit 91 and the pixel array unit, in FIG. 8 The distance is measured in step S903. After that, the loop processing that returns to step S903 through step S903, step S904, step S905, and step S906 is repeated until the setting value determination circuit 744 determines NO (No) in step S904. If the set value determination circuit 744 determines no (No), the distance image output control circuit 743 of the control calculation circuit 74 passes the data to the output unit 75 in step S907, and the output signal is output from the output unit 75. .
- the condition is that linearity of about 5 m is obtained, but in the actual measurement result shown by the broken line in FIG. 10, the linearity of the corresponding estimated distance L has been broken from the actual distance of about 3 m.
- the linearity of the distant view collapses as shown by the broken line in FIG.
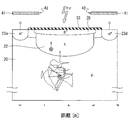
- FIG. 11 is a schematic diagram for explaining the behavior of photoelectrons that causes the linearity of the measured distance with respect to the actual distance to collapse in the distance measuring device according to the reference technology.
- Light (photons) that has passed through the opening 42 of the light shielding film 41 of FIG. 11 is absorbed in the functional base layer 20 to generate photoelectrons (electrons).
- light (photons) is exponentially absorbed from the surface to generate photoelectrons in a one-to-one manner, but in FIG.
- the two photoelectrons generated near the surface-embedded region 22 and relatively deep (far from the surface) of the functional substrate layer 20 and their behavior are shown.
- Photoelectrons generated in a relatively shallow portion of the functional base layer 20 are drift-transported by the electric field applied to the corresponding portion of the functional base layer 20.
- the photoelectrons instantaneously move to the deepest potential portion of the depletion layer generated by the p-type functional base layer 20 and the n-type surface buried region 22, and stand by. After that, if the potential of the charge transfer path defined between the electric field control electrode pairs forming the first charge distribution gates (31a, 31b) shown in FIG. 3 is lowered, photoelectrons are transferred to the first charge storage region 23a. And becomes a signal stored in the first charge storage region 23a.
- photoelectrons generated at a relatively shallow portion of the functional base layer 20 instantaneously move to the deepest potential of the depletion layer generated by the p-type functional base layer 20 and the n-type surface buried region 22 and stand by. If the potential of the charge transfer path defined between the pair of electric field control electrodes forming the charge discharging gates (34a, 34b) shown in FIG. 3 is lowered, the photoelectrons move to the charge discharging region 23d, and the power source (not shown) is supplied. It is discharged to (VDD).
- the photoelectrons generated in the relatively deep portion of the functional base layer 20 do not have an electric field applied in the relatively deep portion of the functional base layer 20, and therefore randomly walk for a while, as schematically shown in FIG. After that, when it reaches a position where an electric field is applied inside the functional base layer 20, due to electric field drift, it instantaneously moves to the deepest potential of the depletion layer generated by the p-type functional base layer 20 and the n-type surface buried region 22. And wait. After that, if the potential of the charge transfer path defined between the electric field control electrode pairs forming the first charge distribution gates (31a, 31b) decreases, the charges move to the first charge storage region 23a, and the first charge storage region 23a moves. The signal is stored in the storage area 23a.
- the photoelectrons generated in a relatively deep portion of the functional base layer 20 randomly walk for a while, and then are instantaneously located at the deepest potential of the depletion layer generated by the p-type functional base layer 20 and the n-type surface buried region 22. Move to and wait.
- the potential of the charge transfer path defined between the electric field control electrode pair forming the charge discharging gates (34a, 34b) is lowered, the photoelectrons move to the charge discharging region 23d and are discharged to a power supply (VDD) not shown. To be done.
- FIG. 12 is a diagram summarizing an image of a main mechanism causing a problem of the distance measuring device according to the reference technique in the form of a transient response waveform.
- FIG. 12A shows the ideal state.
- T o is a light projection time
- T d is a delay time of received light
- T aeff is a time required for charge storage. If the ideal rectangular projection pulse light is emitted, the reception light having the same shape as the projection pulse light is returned with a delay of T d depending on the distance. Then, if the returned received light is applied to the light receiving portion of the distance measuring device according to the reference technique through the opening 42 of the light shielding film 41, a rectangular photoelectron distribution having the same shape can be obtained.
- FIG. 12B shows a state in which the behavior of photoelectrons in the functional base layer 20 shown in FIG. 11 is taken into consideration.
- T o is the light projection time
- T d is the delay time of the received light
- T aeff is the time required for charge storage
- T oeff is the effective light projection time.
- the third charge storage time T a3 is extended and the time-linear correction of the ambient light is performed. Therefore, the third charge storage region 23c and the third auxiliary capacitor C3 by the ambient light are The sum of the respective charge accumulation amounts increases in proportion to the accumulation time. As a result, the pixel is often saturated by the sum of the charge storage amounts of the third charge storage region 23c and the third auxiliary capacitor C3. In order to improve this, the sum of the charge storage amounts of the third charge storage region 23c and the third auxiliary capacitor C3 is calculated as the sum of the charge storage amounts of the first charge storage region 23a and the first auxiliary capacitor C1. The sum may be designed to be larger than the sum of the charge storage amounts of the second charge storage region 23b and the second auxiliary capacitor C2.
- FIG. 14 is a diagram schematically showing a transient response waveform in the distance measuring apparatus according to the second embodiment.
- a view corresponding to FIG. 14 in the distance measuring apparatus according to the modified examples of the first and first embodiments is shown in FIG.
- the distortion of the waveform of the projection light is not taken into consideration. However, actually, as shown in FIG. 14, the projection light itself is delayed or the waveform is distorted.
- the received light enters after a delay of the distance to the subject.
- the photoelectrons are further delayed than the received light waveform due to the reason described in the modified examples of the first and first embodiments, and the waveform is distorted.
- FIG. 15 is a flowchart showing an outline of the operation of the control arithmetic circuit 74 of the distance measuring device according to the second embodiment.
- the influence of the ambient light can be eliminated by correcting the distance measurement value when the flow is performed by the equations (6) to (9) described later, but it is easier to avoid the influence of the ambient light when the flow is performed, and the accuracy is improved. Therefore, it is desirable to perform the measurement in a dark environment.
- the set first charge accumulation time T a1 , the second charge accumulation time T a2 , and the third charge accumulation time T a3 are sent to the drive circuit 94 by the time set value output control circuit 742 via the interface 76 shown in FIG. Output as control signal.
- the light emitting section 91 emits pulsed light.
- each pixel X ij of the pixel array section controls electrons (photoelectrons) generated by receiving light. It operates according to the control signal given from the time setting logic circuit 741 of the arithmetic circuit 74 through the drive circuit 94, and sends the output signal to the logical arithmetic circuit 71 through the output buffer 97.98.
- step S202 the logic operation circuit 71 further sends the calculation result of the distance calculation to the time setting logic circuit 741 of the control calculation circuit 74.
- step S203 of FIG. 15 the set value determination circuit 744 determines whether or not the first signal charge Q1 corresponding to the dark time does not exceed the threshold value stored in the data storage device 72 in advance. However, the first measurement will not be rejected (No). As shown in FIG. 16, light is emitted in synchronism with the timing of accumulating charges in the second charge accumulation region 23b, and the light emission time is always delayed from the timing of accumulating charges in the second charge accumulation region 23b. In the initial setting, the first signal charge Q1 corresponding to the dark time does not exceed the threshold value since the light emission time is delayed.
- step S203 When the set value determination circuit 744 determines YES in step S203, the data is passed to the time setting logic circuit 741 of the control calculation circuit 74.
- the time setting logic circuit 741 measures the distance in step S202 after the time setting logic circuit 741 of the control operation circuit 74 extends the first charge accumulation time T a1 in step S204 of FIG.
- the loop process of returning to step S202 through step S202, step S203, and step S204 is repeated until the set value determination circuit 744 determines NO in step S203.
- the set value determination circuit 744 determines No, in step S205 the time setting logic circuit 741 of the control operation circuit 74 corresponds to the dark time, which is one cycle or more before the first charge accumulation time T a1 .
- the first signal charge Q1 is reduced to a value when it does not exceed the threshold value, and the process ends.
- the estimated distance L by the distance measuring device according to the second embodiment is expressed by the following equations (6) to (9):
- Q2 real (b) Q2-Q1 beta-ef .... (6)
- Q3 real (b) Q3-Q1 beta-ef .... (7)
- Q1 beta-ef. ⁇ ⁇ Q1 ??
- L (cT o / 2) (Q3 real (b) / (Q2 real (b) + Q3 real (b) )) (9)
- ⁇ is the extension ratio of the first charge accumulation time T a1 .
- the first charge accumulation time T a1 can be extended by using the time setting logic circuit 741 of the control arithmetic circuit 74 shown in FIG.
- the time linear correction of the ambient light may be performed by the extension ratio ⁇ of the first charge accumulation time T a1 .
- the received light that is the distance information signal is not received during the first charge accumulation time T a1 used for ambient light correction, and that the first charge accumulation time T a1 ends as long as possible. That is, it is near the time when the light incidence starts.
- the shortest distance that can be measured on the short distance side does not change, but since the second charge accumulation times T a2 and T a3 can be fully used, the distance measurement range can be expanded.
- the first charge storage time T a1 is extended and the time-linear correction of the ambient light is performed. Therefore, the first charge storage region 23a and the first auxiliary capacitor C1 are affected by the ambient light. The sum of the respective charge accumulation amounts increases in proportion to the accumulation time. As a result, the pixel is often saturated with the sum of the charge storage amounts of the first charge storage region 23a and the first auxiliary capacitor C1. In order to improve this, the sum of the charge storage amounts of the first charge storage region 23a and the first auxiliary capacitor C1 is calculated as the sum of the charge storage amounts of the second charge storage region 23b and the second auxiliary capacitor C2. It may be designed to be larger than the sum of the charge storage amounts of the third charge storage region 23c and the third auxiliary capacitor C3.
- FIGS. 1 to 4 An example of the configuration of the distance measuring device according to the third embodiment is shown in FIGS. 1 to 4, like the distance measuring devices according to the first and second embodiments.
- FIG. 17 is a diagram schematically showing a transient response waveform in the distance measuring apparatus according to the third embodiment.
- FIG. 18 is a flowchart schematically showing the operation of the control calculation circuit 74 of the distance measuring device according to the third embodiment.
- FIG. 19 is a timing diagram based on the flowchart of FIG.
- the waveform shown in FIG. 17 shows a state in which the subject whose distance is desired to be measured is at the shortest distance.
- a flow for extending the second charge storage time T a2 is added to the flowchart of FIG.
- the flow of extending the added second charge storage time T a2 is substantially the same as the flow of extending the third charge storage time T a3 of the distance measuring device according to the first embodiment. That is, the third embodiment is a combination of the first embodiment and the second embodiment, and can improve the linearity of the distant view and expand the range-finding range at the same time.
- the distance measurement value at the time of implementing the flowchart of FIG. 18 can eliminate the influence of ambient light by correction by the following equations (10) to (14). However, when performing the flowchart of FIG. 18, it is easier to avoid the influence of ambient light and the accuracy can be improved. Therefore, it is desirable to perform the measurement in a dark environment.
- ⁇ is the extension rate of the first charge storage time T a1
- ⁇ is the extension rate of the third charge storage time T a3
- the first charge accumulation time T a1 and the third charge accumulation time T a3 can be extended by using the time setting logic circuit 741 of the control arithmetic circuit 74 shown in FIG. Therefore, as shown in Expressions (10) to (14), the time linear correction of the ambient light may be performed with the extension ratio ⁇ of the first charge accumulation time T a1 and the extension ratio ⁇ of the third charge accumulation time T a3. .
- the respective charge storage times are all different from each other, and the distance measurement calculation formula need only be corrected linearly with respect to each charge storage time. That is, in driving the image sensor pixel of the present invention, it is not always necessary that the respective charge storage times be the same, and the respective charge storage times may be changed to be optimum depending on the situation.
- the first charge accumulation region 23a and the first auxiliary by the ambient light are generated.
- the sum of the charge storage amounts of the capacitor C1 and the sum of the charge storage amounts of the third charge storage region 23c and the third auxiliary capacitor C3 increase in proportion to the storage time.
- the pixel is saturated by the sum of the charge storage amounts of the first charge storage region 23a and the first auxiliary capacitor C1 and the sum of the charge storage amounts of the third charge storage region 23c and the third auxiliary capacitor C3. In many cases.
- the sum of the charge storage amounts of the first charge storage region 23a and the first auxiliary capacitor C1 and the sum of the charge storage amounts of the third charge storage region 23c and the third auxiliary capacitor C3. May be designed to be larger than the sum of the charge storage amounts of the second charge storage region 23b and the second auxiliary capacitor C2.
- FIG. 21 shows a sectional view of a main part of a pixel of the distance measuring device according to the fourth embodiment.
- the main part of the pixel is in contact with the surface of the functional base layer 20 made of a p-type semiconductor, the n-type surface-embedded region 22 provided in a part of the upper portion of the functional base layer 20, and the surface-embedded region 22.
- the photoelectric conversion region (29, 22) including the p + -type pinning layer 29 provided and the gate insulating film 33 provided on the photoelectric conversion region (29, 22) are included.
- the central portion of the photoelectric conversion area (29, 22) is used as a light receiving area.
- Impurity density higher than that of the functional base layer 20 is provided so as to surround the photoelectric conversion region (29, 22) at two respective positions symmetrical with respect to the center position of the photoelectric conversion region (29, 22).
- the n + -type first charge accumulation region 23p is arranged as the first floating drain region FD1
- the second charge accumulation region 23q is arranged as the second floating drain region FD2.
- first charge distribution gate 54p (G1) and the second charge distribution gate 54q (G2) which are the two charge distribution gates, have the gate insulating film 33 in the region where the portions other than the opening are shielded by the light shielding film 41. They are connected so as to form a mechanism of a gate type transistor structure.
- the first charge storage region 23p and the second charge storage region 23q are connected as the drain regions of the insulated gate transistors forming the respective charge distribution gates.
- a first auxiliary capacitor C1 and a second auxiliary capacitor C2, and source follower amplification transistors SF1 and SF2 are provided in the first charge storage region 23p and the second charge storage region 23q, respectively, via surface wiring or the like. Connected.
- the channel (charge transfer path) is moved to the floating drain region connected to the transfer gate electrode side where the channel is made conductive.
- the pulsed light is emitted from almost the same position as the image sensor shown in FIG. 21, and the reflected light from the object 92 (see FIG. 1) is received by the image sensor.
- the received light enters the image sensor with a delay time Td from the time when the projection light is emitted, depending on the distance between the object 92 and the image sensor.
- the amount of accumulated charge corresponding to each transfer gate electrode varies depending on the distance between the two, and the distance to the target object 92 can be obtained.
- the received light that has entered the light receiving area of the photoelectric conversion area (29, 22) is delayed. Occurs.
- the photons of the received light are exponentially absorbed from the surface in the photoelectric conversion region (29, 22) and generate photoelectrons in a one-to-one manner.
- the charge accumulation time is set to different lengths by using the time setting logic circuit 741 of the control arithmetic circuit 74 shown in FIG. Set. Specifically, like the drive pulse in the first embodiment, the time setting logic circuit 741 charges the second charge storage time T a2 in which the charges are stored in the second charge storage region 23q to the first charge storage region 23p. Is longer than the first charge accumulation time T a1 .
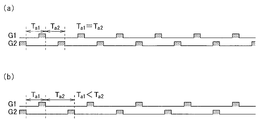
- 20B is a timing diagram showing drive pulses of the distance measuring device according to the fourth embodiment
- FIG. 20A is a timing diagram showing drive pulses of the distance measuring device according to the reference technique.
- the charges that have reached the light receiving region of the photoelectric conversion region (29, 22) are transferred to and accumulated in either the first charge accumulation region 23p or the second charge accumulation region 23q. ing.
- the drive pulse of the distance measuring device according to the reference technology illustrated in FIG. 20A in the case of the distant object 92, the electrons that should enter the second charge storage region 23q are the first charge storage region of the next cycle. Since it enters 23p, the distance accuracy is reduced.
- the drive pulse of the distance measuring device according to the reference technology described in FIG. 20A the electrons that should have entered the second charge accumulation region 23q, which had been included in the first charge accumulation region 23p in the next cycle, are as shown in FIG.
- the drive pulse of the distance measuring apparatus according to the fourth embodiment described in 20 (b) enters the second charge accumulation region 23q without entering the first charge accumulation region 23p in the next cycle.
- the second charge storage time T a2 is lengthened by using the time setting logic circuit 741 of the control arithmetic circuit 74 shown in FIG. Even if the object is far away, the distance accuracy does not decrease.
- FIG. 23 shows a sectional view of a main part of a pixel of a distance measuring device according to a modification of the fourth embodiment.
- the pixel main portion shown in FIG. 23 has a structure in which the third charge distribution gate 54s (G3) is connected to the light receiving region of the photoelectric conversion region (29, 22) of the pixel main portion shown in FIG. .
- a third charge storage region 23s is connected to the third charge distribution gate 54s, and a third auxiliary capacitor C3 (not shown) and a source follower amplification transistor SF3 are connected via a surface wiring or the like.
- a first reset transistor R1, a second reset transistor R2, and a third reset transistor R3 are further connected to the first charge storage region 23p, the second charge storage region 23q, and the third charge storage region 23s, respectively.
- FIG. 22B is a timing diagram showing drive pulses of the distance measuring apparatus according to the modification of the fourth embodiment
- FIG. 22A shows drive pulses of the distance measuring apparatus according to the fourth embodiment. It is a timing diagram.
- the distance measuring device according to the reference technology has a problem that the distance accuracy is reduced when the object is far away. Therefore, in the modification of the fourth embodiment, when the channel (charge transfer path) immediately below the third charge distribution gate 54s is made conductive, the channel (charge transfer path) of the third reset transistor R3 is switched to the conductive state. By setting the conductive state, the charges are discharged to the power supply connected to the reset drain region of the third reset transistor R3 without storing the charges in the third charge accumulation region 23s. Therefore, the electrons that should enter the second charge accumulation region 23q will not enter the first charge accumulation region 23p of the next cycle, and the distance accuracy can be ensured satisfactorily.
- FIG. 25 is a plan view of a main part of a pixel of the distance measuring device according to the fifth embodiment.
- the photogate (PG) 11 having a photoelectric conversion part using a MOS structure having a transparent electrode as a gate electrode is provided so as to be spaced apart from each other at six positions symmetrical with respect to the center position of the photogate 11 so as to surround the photogate (PG) 11.
- the first charge storage region 23p serves as the first floating drain region FD1
- the second charge storage region 23q serves as the second floating drain region FD2
- the third charge storage region 23r serves as the third floating drain region FD3
- the fourth charge storage region The region 23s is the floating drain region FD4, and the first charge discharging region 23u and the second charge discharging region 23v are connected to the power supply VDD.
- a first charge allocating gate 33p (G1) and a second charge allocating gate 33q (G2) are provided so as to surround the periphery of the photogate 11 whose area is defined by shielding the area other than the opening with a light shielding film (not shown).
- the third charge distribution gate 33r (G3), the fourth charge distribution gate 33s (G4), the first charge discharge gate 33u (GD), and the second charge discharge gate 33v (GD) are insulated gate transistor structures, respectively. Are connected as the six transfer gate electrodes that form the mechanism. ..
- the first charge distribution gate 33p, the second charge distribution gate 33q, the third charge distribution gate 33r, the fourth charge distribution gate 33s, the first charge discharge gate 33u, and the second charge are arranged.
- the first charge storage region 23p, the second charge storage region 23q, the third charge storage region 23r, the fourth charge storage region 23s, and the first charge are used as the drain regions of the insulated gate transistors that respectively configure the six charge distribution gates.
- the discharge area 23u and the second charge discharge area 23v are connected. ..
- each of the first charge storage region 23p, the second charge storage region 23q, the third charge storage region 23r, and the fourth charge storage region 23s has a first auxiliary capacitor C1, a second auxiliary capacitor C2, and a second auxiliary capacitor C2.
- the 3rd auxiliary capacitor C3 and the 4th auxiliary capacitor C4 are connected via surface wiring etc., respectively.
- a first source follower amplification transistor SF1, a second source follower amplification transistor SF2 The third source follower amplification transistor SF3 and the fourth source follower amplification transistor SF4 are connected via a surface wiring or the like.
- the first charge discharging area 23u and the second charge discharging area 23v are connected to a power source through surface wiring or the like. ..
- the signal charge or the like collected in the photogate 11 is stored in one of the first charge distribution gate 33p, the second charge distribution gate 33q, the third charge distribution gate 33r, and the fourth charge distribution gate 33s.
- the channel (charge transfer path) moves to the floating drain region connected to the conductive charge distribution gate.
- the channels (charge transfer path) immediately below the first charge discharging gate 33u or the second charge discharging gate 33v is made conductive, charges and the like caused by background light (environmental light) are drained. Is discharged to the power supply via.
- the pulsed light is emitted from almost the same position as the image pickup device shown in FIG. 25, and the reflected light from the object 92 (see FIG. 1) is received by the image pickup device.
- the received light enters the image sensor with a delay of Td from the time when the projection light is emitted, depending on the distance between the object 92 and the image sensor.
- the light projection time T o of the projection light and ON / OFF of the voltage pulse applied to the first charge distribution gate 33p, the second charge distribution gate 33q, the third charge distribution gate 33r or the fourth charge distribution gate 33s. Are synchronized to the first charge accumulation region 23p according to the pulse applied to the first charge distribution gate 33p, and to the second charge accumulation region 23q according to the pulse applied to the second charge distribution gate 33q.
- the delay time Td of the received light is set to the third charge accumulation region 23r according to the pulse applied to the third charge distribution gate 33r, to the fourth charge accumulation region 23s according to the pulse applied to the fourth charge distribution gate 33s. That is, depending on the distance between the distance measuring device and the target object 92, the amount of accumulated charge corresponding to each charge distribution gate varies, and the distance to the target object 92 can be obtained.
- the received light that has entered the light receiving region is delayed even inside the silicon. That is, due to the spread of the photoelectrically converted position, the time collected by the photogate 11 and reaching each of the corresponding charge storage regions via the four charge distribution gates varies, resulting in a delay.
- FIG. 24B is a timing diagram showing drive pulses of the distance measuring device according to the fifth embodiment
- FIG. 24A is a timing diagram showing drive pulses of the distance measuring device according to the reference technique.
- the length of the charge storage time is the same, but the charge storage time may be set to a different length in consideration of the decrease in the distance accuracy due to the delayed signal charge or the like.
- the time setting logic circuit 741 of the control calculation circuit 74 of FIG. 2 as shown in the timing chart of FIG. 24B, it is assigned as the time for accumulating charges in the fourth charge accumulating region 23s.
- the fourth charge storage time T a4 is assigned as the first charge storage time time T a1 which is assigned as the time for storing the charge in the first charge storage region 23p
- the second charge time is assigned as the time for storing the charge in the second charge storage region 23q. It may be set longer than the charge accumulation time T a2 and the third charge accumulation time T a3 assigned as the time for accumulating charges in the third charge accumulation region 23r.
- the rangefinders In the rangefinders according to the first to fifth embodiments, the cases where the number of charge distribution gates serving as the path of the signal charge including the background light (environmental light) component is three and four are described. However, the same argument holds when the number of charge distribution gates serving as the path of the signal charge including the background light (environmental light) component is larger than five. Generally, if N charge distribution gates with N being a positive integer of 3 or more, for example, if the charge accumulation time assigned to the Nth charge distribution gate is lengthened, the first to fifth embodiments are performed. The function and effect similar to those described in the distance measuring device can be realized.
- FIG. 27 shows a plan view of main parts of pixels of the distance measuring device according to the sixth embodiment
- FIG. 26 shows a plan view of main parts of pixels of the distance measuring device according to the reference technology.
- the n + -type first charge storage regions 23p provided separately from each other at four positions symmetrical with respect to the central position of the photodiode 11 having the photoelectric conversion unit using the pn junction are the first floating drains.
- the region FD1 the n + -type second charge storage region 23q serves as the second floating drain region FD2
- the n + -type third charge storage region 23r serves as the third floating drain region FD3, and the n + -type charge discharging region 23s. Is arranged as a drain.
- a first charge distribution gate 54p (G1) which is four charge distribution gates, and a second light distribution gate 54p (G1), so as to surround the photodiode 11 whose region is defined by shielding light other than the opening with a light shielding film (not shown)
- a charge distribution gate 54q (G2), a third charge distribution gate 54r (G3) and a charge discharge gate 54s (GD) are arranged.
- the first charge distribution gate 54p, the second charge distribution gate 54q, the third charge distribution gate 54r, and the charge discharge gate 54s are conductors such as polycrystalline silicon so as to form a mechanism of an insulated gate transistor structure.
- the thin film constitutes the gate electrode.
- the first charge storage region 23p, the second charge storage region 23q, the third charge storage region 23r, and the charge discharge region 23s are connected to the drain region of the insulated gate transistor that constitutes each charge distribution gate.
- a first auxiliary capacitor C1, a second auxiliary capacitor C2, and a third auxiliary capacitor C3 are connected to each of the first charge storage region 23p, the second charge storage region 23q, and the third charge storage region 23r via a surface wiring or the like.
- the first auxiliary capacitor C1 shown in the upper right of FIGS. 26 and 27 is an n + type diffusion region 25p, a capacitor insulating film (not shown) provided on the diffusion region 25p, and a capacitor insulating film on the capacitor insulating film.
- a parallel plate type capacitor can be constituted by the provided first capacitor electrode 38p made of a conductor thin film such as polycrystalline silicon.
- the second auxiliary capacitor C2 shown in the lower right of FIGS. 26 and 27 is an n + type diffusion region 25q, a capacitor insulating film (not shown) provided on the diffusion region 25q, and this capacitor insulation.
- a parallel plate type capacitor can be constituted by the second capacitor electrode 38q made of a conductive thin film such as polycrystalline silicon provided on the film.
- the third auxiliary capacitor C3 shown in the upper left of FIG. 26 is an n + type diffusion region 25r, a capacitor insulating film (not shown) provided on the diffusion region 25r, and a capacitor insulating film provided on the capacitor insulating film.
- the third capacitor electrode 38r made of a conductive thin film such as polycrystalline silicon thus formed constitutes a parallel plate type capacitor.
- the third auxiliary capacitor C3 shown in the upper left of FIG. 27 includes an n + type diffusion region 25R having a larger area than the diffusion region 25r of FIG. 26 and a capacitor insulating film (not shown) provided on the diffusion region 25R. ) And a third capacitor electrode 38r made of a conductor thin film such as polycrystalline silicon provided on the capacitor insulating film, thereby forming a parallel plate type capacitor. Therefore, the third auxiliary capacitor C3 shown in FIG. 27 is about 1.4 times larger than the capacity of the third auxiliary capacitor C3 shown in FIG. 26 and 27, the capacitance of the first auxiliary capacitor C1 and the capacitance of the second auxiliary capacitor C2 are equal.
- the capacitance of the third auxiliary capacitor C3 is equal to that of the first auxiliary capacitor C1 in FIG. It is about 1.4 times the capacity.
- the six white squares shown above the diffusion region 25p, the diffusion region 25q, and the diffusion region 25r each schematically show a contact hole, and diffuse through the surface wiring extending above the contact hole.
- the region 25p, the diffusion region 25q, and the diffusion region 25r are connected to the ground potential (GND).
- first charge storage region 23p, the second charge storage region 23q, and the third charge storage region 23r are used as respective source regions, and a first reset transistor RT having a first gate electrode 53p and a second gate electrode 53q are provided.
- a 3 reset transistor RT having 2 reset transistors RT and a third gate electrode 53r is configured.
- the first gate electrode 53p, the second gate electrode 53q, and the third gate electrode 53r can be composed of a conductor thin film such as polycrystalline silicon.
- the first reset transistor RT has a first reset drain (RD) region 26p facing the first charge storage region 23p via the first gate electrode 53p.
- the second reset transistor RT has a second reset drain (RD) region 26q facing the second charge storage region 23q via the second gate electrode 53q.
- the third reset transistor RT has a third reset drain (RD) region 26r that faces the third charge storage region 23r via the third gate electrode 53r.
- Each of the white squares shown above the first reset drain region 26p, the second reset drain region 26q, and the third reset drain region 26r is a schematic representation of a contact hole, and is above the contact hole.
- the first reset drain region 26p, the second reset drain region 26q, and the third reset drain region 26r are connected to the power supply potential (V DD ) via the surface wiring extending to.
- each of the white squares shown above the first charge storage region 23p, the second charge storage region 23q, and the third charge storage region 23r also schematically shows a contact hole.
- the first charge storage region 23p, the second charge storage region 23q, and the third charge storage region 23r are connected to the first amplification gate electrode 52p of the first source follower amplification transistor SF1 and the second source of the second source via the surface wiring extending upward.
- the second amplification gate electrode 52q of the follower amplification transistor SF2 and the third amplification gate electrode 52r of the third source follower amplification transistor SF3 are connected via a surface wiring or the like.
- the fourth charge storage region 23s is connected to the power supply potential (V DD ) via a surface wiring or the like which runs on a contact hole which is schematically shown by a single white square.
- first charge storage region 23p, the second charge storage region 23p, the second charge storage region 23q, and the third charge storage region 23r via other surface wirings extending above the contact holes, respectively.
- 23q and the third charge storage region 23r are connected to the first capacitor electrode 38p of the first auxiliary capacitor C1, the second capacitor electrode 38q of the second auxiliary capacitor C2, and the third capacitor electrode 38r of the third auxiliary capacitor C3. .
- Illustration of the first amplification drain region 18p of the first source follower amplification transistor SF1, the second amplification drain region 18q of the second source follower amplification transistor SF2, and the third amplification drain region 18r of the third source follower amplification transistor SF3 is omitted.
- the first amplification source region 21p of the first source follower amplification transistor SF1 is connected as a common region to the first drain electrode of the pixel selection first selection transistor SL1.
- the second amplification source region 21q of the second source follower amplification transistor SF2 is connected to the second drain electrode of the second selection transistor SL2 for pixel selection as a common region, and the third amplification of the third source follower amplification transistor SF3 is performed.
- the source region 21r is connected as a common region to the third drain electrode of the third selection transistor SL3 for pixel selection.
- the first selection source region 19p of the first selection transistor SL1 is provided with a first vertical output signal line through a contact hole that is schematically shown by one white square.
- a horizontal line selection control signal S connected to Sig1 and supplied to the first selection gate electrode 51p of the first selection transistor SL1 from the vertical shift register and vertical scanning circuit 95 shown in FIG.
- the second selection source region 19q of the second selection transistor SL2 is connected to the second vertical output signal line Sig2 through one contact hole which is schematically shown by a white square, and A control signal S for selecting a horizontal line is supplied from the vertical shift register and vertical scanning circuit 95 to the second selection gate electrode 51q of the selection transistor SL2.
- the third selection source region 19r of the third selection transistor SL3 is connected to the third vertical output signal line Sig3 through a contact hole that is schematically shown by one white square, and the third selection source region 19r is connected.
- a horizontal line selection control signal S is applied to the third selection gate electrode 51r of the transistor SL3 from the vertical shift register and vertical scanning circuit 95.
- the selection transistors SL1, SL2, SL3 are rendered conductive, and the first charge accumulation regions 23p and the second charge accumulation regions 23q amplified by the source follower amplification transistors SF1, SF2, SF3.
- the first vertical output signal line Sig1, the second vertical output signal line Sig2, and the third vertical output signal line Sig3 are at potentials corresponding to the potential of the third charge storage region 23r.
- the capacitance of the third auxiliary capacitor C3> the capacitance of the first auxiliary capacitor C1 the second auxiliary capacitor C2.
- the charge accumulation time lastly allocated among the charge accumulation times allocated to the plurality of charge distribution gates is lengthened. At this time, due to the ambient light, the sum of the charge storage region connected to the last charge distribution gate having the longer charge storage time and the charge storage amount stored in the auxiliary capacitor increases.
- Saturation of the pixel of the ranging device due to an increase in the sum of the charge storage region connected to the charge distribution gate and the charge storage amount stored in the auxiliary capacitor corresponding to the charge storage time finally allocated Will often be decided.
- the sum of the charge storage area connected to the charge distribution gate corresponding to the last charge allocation time and the capacity of the charge stored in the auxiliary capacitor is added to the charge storage gate connected to another charge distribution gate. It may be designed to be larger than the sum of the capacitances of the charges accumulated in the region and the auxiliary capacitor.
- the third auxiliary capacitor C3 is 1.4 times larger than the first auxiliary capacitor C1 and the second auxiliary capacitor C2 is illustrated, but the third auxiliary capacitor C3 is not limited to 1.4 times, and the environment is not limited to 1.4 times.
- the capacitance value may be appropriately designed in consideration of light intensity and the like.
- the present invention has been described by the first to sixth embodiments, but it should not be understood that the description and drawings forming a part of this disclosure limit the present invention. From this disclosure, various alternative embodiments, examples and operational techniques will be apparent to those skilled in the art.
- the first conductivity type is p-type and the second conductivity type is n-type, but the first conductivity type is n-type and the second conductivity type is n-type. It can be easily understood that the same effect can be obtained by reversing the electric polarities even with the p-type.
- the “charge distribution gate” of the present invention is configured by a pair of lateral electric field control gates (LEFM) with reference to FIG. Indicated.
- LFM lateral electric field control gates
- the structure of the charge distribution gate is the MOS type or MIS type gate electrode structure is illustrated.
- the structure of the charge distribution gate and the charge discharging electrode are not limited to the LEFM and the electrode structure of the insulated gate transistor exemplified in the first to sixth embodiments. Any configuration may be used as long as it has a function of transporting or transferring similar signal charges.
- the photoelectric conversion unit has been described by using the light receiving region forming the pn junction type photodiode.
- the photoelectric conversion section has been described as having a photogate structure using a MOS structure in which a transparent electrode is a gate electrode.
- the photoelectric conversion unit is not limited to the structure of the photodiode or the photogate, and any other structure having a similar photoelectric conversion function may be used.
- the distance measuring devices according to the first to sixth embodiments of the present invention can be used as a 3D image pickup device in the technical field such as a camera illustrated in FIG. 28, for example.
- a camera such as a video camera, which may be used in the technical field, has a single imaging optical system (43, 44) and an optical axis of the imaging optical system (43, 44).
- Used for auto-focusing (AF) and a 3D image pickup device 45a that constitutes a main part of the distance measuring device according to the first to sixth embodiments that picks up an image of an object 92 (see FIG. 1) incident along it.
- a distance sensor (distance measuring element) 15 using the distance measuring device according to the first to sixth embodiments is provided.
- a camera that may utilize the present invention is an A / D that converts image data output from the 3D image pickup device 45a that constitutes the main part of the distance measuring device according to the first to sixth embodiments into digital data.
- a conversion circuit 47 a memory (semiconductor memory device) 48 for storing image data converted into digital data by the A / D conversion circuit 47, a central processing control unit (CPU) 13 for receiving image data from the memory 48, and a central processing unit.
- An image processing unit 14 that receives image data via the processing control unit 13 and processes the image data.
- the image processing unit 14 is connected to an adjustment data storage device 99 ext that stores the adjustment data of the 3D imaging device 45a and the distance sensor (distance measuring element) 15, and the adjustment data storage device 99 ext is shown in FIGS. 5, 8, 15 and 18.
- the adjustment according to the flowchart as illustrated is possible.
- FIG. 28 is merely an example, and an adjustment data storage device that saves the adjustment data transmitted from the central processing control unit 13 on a semiconductor chip on which the 3D image pickup device 45a or the distance sensor (distance measuring element) 15 is mounted is provided.
- the structure may be such that it is connected and supplies adjustment data to the drive circuit on the semiconductor chip.
- a drive unit 12 connected to a central processing control unit 13, a memory card interface 19 such as a media controller, an operation unit 18, an LCD drive circuit 16, a motor driver 13b. , 13c, 13d, and a strobe control circuit 61 can be provided.
- the LCD drive circuit 16 is connected to a display unit 57 composed of an LCD, and the strobe control circuit 61 is connected to a strobe device 62.
- the strobe device 62 can configure the light emitting unit 91 shown in FIG.
- the central processing control unit 13 of the camera illustrated in FIG. 28 includes an image processing unit 14, a driving unit 12, a memory 48, a memory card interface 19, an operation unit 18, an LCD driving circuit 16, which are connected to the central processing control unit 13.
- the distance sensor (distance measuring element) 15, the motor drivers 13b, 13c, 13d and the strobe control device output commands and electric signals for controlling the respective operations and processes.
- the central processing control unit 13 includes an image processing unit 14, a drive unit 12, a memory 48, a memory card interface 19, an operation unit 18, an LCD drive circuit 16, a distance sensor (distance measuring element). 15.
- Various logic circuits such as a command output circuit for executing respective operations of the motor driver 13b, 13c, 13d, and the flash control device, and various logic circuits such as a WB adjustment command output circuit for performing automatic white balance (AWB) adjustment are logical. Is incorporated as a general hardware resource.
- the taking lens 43 constituting the imaging optical system (43, 44) includes, for example, a main lens 43a, a zoom lens 43b adjacent to the main lens 43a, a focus lens 43c adjacent to the zoom lens 43b, and the like. Can be provided.
- the zoom lens 43b is connected to the zoom motor 49b
- the focus lens 43c is connected to the focus motor 49c.
- a diaphragm 44 that constitutes the imaging optical system (43, 44) is arranged between the focus lens 43c and the 3D imaging device 45a.
- an iris motor 50 that drives the diaphragm blades is connected to the diaphragm 44 composed of five diaphragm blades.
- the zoom motor 49b, the focus motor 49c, and the iris motor 50 are stepping motors, operation-controlled by drive pulses transmitted from the motor drivers 13b, 13c, 13d connected to the central processing controller 13, and operation parts such as a release button. Imaging preparation processing is performed by a signal from 18.
- the zoom motor 49b moves the zoom lens 43b toward the wide side or the tele side in, for example, 20 to 50 steps to zoom the photographing lens 43.
- the focus motor 49c moves the focus lens 43c according to the distance from the object 92 and the zooming of the zoom lens 43b, and adjusts the focus of the taking lens 43 so that the imaging conditions of the camera are optimized.
- the iris motor 50 operates the diaphragm blades of the diaphragm 44 to change the aperture area of the diaphragm 44 and appropriately adjust the exposure of the taking lens 43 up to a desired diaphragm value.
- the taking lens 43 is not limited to the configuration illustrated in FIG. 28, and may be, for example, an interchangeable lens that can be attached to and detached from the camera.
- the taking lens 43 is composed of a plurality of optical lens groups such as the main lens 43a, the zoom lens 43b, and the focus lens 43c, so that the light flux from the target object 92 of the 3D imaging device 45a arranged near the focal plane thereof. Image on the surface.
- the 3D imaging device 45a which constitutes the main part of the distance measuring device according to the first to sixth embodiments, is mounted on a chip mounting substrate (package substrate) 46 made of glass or ceramics.
- a timing generator (TG) 63 is connected to the 3D imaging device 45 a, and the timing generator 63 is connected to the central processing control unit 13 via the drive unit 12.
- the timing generator 63 generates a timing signal (clock pulse) in response to a signal sent from the central processing control unit 13 via the drive unit 12, and the timing signal is a semiconductor chip constituting the 3D imaging device 45 a via the chip mounting substrate 46. It is sent to the pixels in each row as an electronic shutter signal from a drive circuit provided above as a peripheral circuit.
- the central processing control unit 13 controls the timing generator 63 via the drive unit 12 to control the shutter speed of the electronic shutter of the 3D imaging device 45a.
- the timing generator 63 may be monolithically integrated as a peripheral circuit on a semiconductor chip that constitutes the 3D imaging device 45a.
- the image pickup signal output from the central pixel array portion of the semiconductor chip that constitutes the 3D image pickup device 45a is input to a correlated double sampling circuit (CDS) provided as a peripheral circuit in the peripheral portion of the semiconductor chip, and is input to the 3D image pickup device.
- CDS correlated double sampling circuit
- the 3D image pickup device 45a outputs R, G, and B image data that accurately correspond to the accumulated charge amount of each pixel of the pixel 45a.
- the image data output from the 3D imaging device 45a is amplified by an amplifier (not shown) and converted into digital data by the A / D conversion circuit 47.
- the 3D image pickup device 45a is timing-controlled by the drive unit 12, and converts the image of the object 92 formed on the light receiving surface of the 3D image pickup device 45a into an image signal and outputs the image signal to the A / D conversion circuit 47.
- the image processing unit 14 of the camera illustrated in FIG. 28 is a WB control amount calculation circuit that calculates a WB control amount used for white balance adjustment, integrates G signals of the entire screen, or centers the screen. G and G signals with different weights are integrated in the peripheral part and the peripheral part and the integrated value is output, and a logical operation circuit for automatic exposure (AE) detection and an integrated value output by the logical operation circuit for AE detection are necessary for AE.
- AE automatic exposure
- a variety of image processing and calculations associated with image processing such as a shooting Ev value calculation circuit that calculates the brightness (shooting Ev value) of the target object 92, a gradation conversion processing circuit, a white balance correction processing circuit, and a ⁇ correction processing circuit. It is also possible to provide various logic circuits (hardware modules) that apply to the image data as hardware resources in a logical configuration.
- the image processing unit 14 can be realized if there is an image processing engine or the like. Further, if the calculation load for the feature amount generation and the identification process is high, the feature amount may be mounted on hardware. For example, it is possible to configure the image processing unit 14 with a computer system using an MPU or the like mounted as a microchip. Further, as the image processing unit 14 included in the computer system, a DSP having an enhanced arithmetic operation function and specialized in signal processing, a microcomputer equipped with a memory or a peripheral circuit for the purpose of controlling an embedded device, and the like may be used. Alternatively, the main CPU of the current general-purpose computer may be used for the image processing unit 14. Further, part or all of the configuration of the image processing unit 14 may be configured by PLD such as FPGA.
- Third capacitor electrode 41 ... Shading film, 42 ... Opening portion, 43 ... Photographing lens, 43a ... Main lens, 43b ... Zoom lens, 43c ... Focus lens, 45a ... 3D image pickup device, 46 ... Chip mounting Substrate, 47 ... A / D conversion circuit, 48 ... Memory, 49b ... Zoom motor, 49c ... Focus motor, 50 ... Iris motor, 51p ... First selection gate electrode, 51q ... Second selection gate electrode, 51r ... Third selection Gate electrode, 52p ... First amplification gate electrode, 52q ... Second amplification gate electrode, 52r ... Third amplification gate electrode, 53p ... First gate electrode, 53 q ... second gate electrode, 53r ... third gate electrode, 54p ...
- first transfer gate electrode 54p ... first charge distribution gate, 54q ... second charge distribution gate, 54r ... third charge distribution gate, 54s Charge discharging gate 57 Display unit 61 Strobe control circuit 62 Strobe device 63 Timing generator 71 Logical operation circuit 72 Data storage device 736 Bus 74 Control operation circuit 741 Time setting logic circuit, 742 ... Time set value output control circuit, 743 ... Distance image output control circuit, 744 ... Set value determination circuit, 745 ... Sequence control circuit, 75 ... Output section, 76 ... Interface, 77 ... Program storage device, 81 ... Signal generation section, 82 ... Read-amplification circuit, 91 ... Light emitting section, 92 ... Object, 93 ... Lens, 94 ... Drive circuit, 95 ... Vertical scanning circuit, 9 ... horizontal shift register, 97, 98 ... output buffer, 99 ext ... adjustment data storage device
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Electromagnetism (AREA)
- Signal Processing (AREA)
- Multimedia (AREA)
- Power Engineering (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Measurement Of Optical Distance (AREA)
- Transforming Light Signals Into Electric Signals (AREA)
- Solid State Image Pick-Up Elements (AREA)
Abstract
【課題】遠景の線形性が改善され、測距範囲が拡大された測距装置を提供する。 【解決手段】受光領域で光電変換された信号電荷を順に振り分け転送するN個の電荷振分ゲートと、電荷を受光領域から排出する電荷排出ゲートと、信号電荷をそれぞれ蓄積するN個の電荷蓄積領域と、N個の電荷振分ゲート及び電荷排出ゲートに順次、駆動信号を供給する駆動回路94と、N個の電荷蓄積領域に蓄積された信号電荷を読み出す読出増幅回路と、読出増幅回路を経由した信号を入力し、対象物92までの距離の算出を含む演算を実施する論理演算回路71と、論理演算回路71が出力した値から、N個の電荷振分ゲートの内の特定の電荷蓄積時間を伸張する信号を生成する制御演算回路74を備える。
Description
本発明は、測距素子及び3D撮像装置等の測距装置に関し、特にCMOSイメージセンサ(CIS)又はこのCISの画素を用いた測距装置、この測距装置を搭載したカメラ及び測距装置の駆動調整方法に関する。
近年、固体撮像装置を用いた3Dイメージング素子の開発が活発に行われている。3Dイメージング素子においても、従来CCDイメージセンサ(CCD)が主流であったが、現在は、CISが主流となりつつある。
各種3Dイメージング手法の中でも、光飛行時間(TOF)型は距離精度が高く、又測定可能距離範囲が広く且つ距離演算が比較的容易な手法である。TOF型3Dイメージング素子は、主に連続波変調(CW)型と光パルス同期型とがある。CW型及び光パルス型のいずれもフォトダイオード(PD)等の光ディテクタに複数の電荷振分ゲートが付加された構造をなしており、この複数の電荷振分ゲートのオン/オフを繰り返すロックイン駆動を行っている。
TOF型3Dイメージング素子は、信号光に赤外光を用い、環境光(背景光)を除去するために、バンドパスフィルタ等を用い信号光以外の光を出来るだけカットして使用するのが一般的である。しかし、環境光をすべて除去することは非常に困難である。3タップ(Tap) ロックインピクセルと称される3分岐型ロックインピクセルでは、3つの電荷振分ゲートの内の最初に電荷を振り分ける一つの電荷振分ゲートを環境光の除去専用に用いており、環境光除去能力が高いので、室外や明るい室内等、環境光の影響が大きい環境での使用に適している。
しかしながら、従来の3分岐型ロックインピクセルでは3つの電荷振分ゲートに電荷を振り分ける3分岐経路の1回当たりの電荷蓄積時間、即ち前のゲートオフから次のゲートオフまでの時間の長さがすべて同じ長さに設定されていた(特許文献1参照。)。このことにより、遠景の線形性が劣化し、測距範囲が狭くなるという課題があった。
図10の破線は、特許文献1に記載された発明の手法にしたがって、撮像素子から被写体までの実際の距離と測距データとの関係を調べた結果である。従来の3分岐型ロックインピクセルでは、実際の距離が3m程度の距離から線形性が崩れてきていることが分かる。
上記問題点を鑑み、本発明は、遠景の線形性が改善され、且つ測距範囲が拡大された測距装置、この測距装置を搭載したカメラ、及び測距装置の駆動調整方法を提供することを目的とする。
本発明の第1の態様は、(a)対象物に光パルスを投影する発光部と、(b)対象物からの光パルスの反射光を受光する受光領域と、 (c)Nを3以上の正の整数とし、受光領域で光電変換された信号電荷を、N個の電荷移動経路に沿って順に振り分け転送するN個の電荷振分ゲートと、(d)信号電荷以外の電荷を受光領域から排出する電荷排出ゲートと、(e)N個の電荷振分ゲートに沿って転送された信号電荷をそれぞれ蓄積するN個の電荷蓄積領域と、(f)発光部に制御信号を供給し、且つN個の電荷振分ゲート及び電荷排出ゲートのそれぞれに順次駆動信号を供給する駆動回路と、(g)N個の電荷蓄積領域に蓄積された信号電荷をそれぞれ独立に読み出す読出増幅回路と、(h)読出増幅回路を経由した信号を入力し、対象物までの距離の算出を含む演算を実施する論理演算回路と、(i)論理演算回路が出力した値から、N個の電荷振分ゲートの内の特定の電荷振分ゲートに割り当てられる電荷蓄積時間を、逐次伸張する信号を生成し、駆動回路に供給する制御演算回路を備える測距装置であることを要旨とする。
本発明の第2の態様は、(p)撮像光学系と、(q)対象物に光パルスを投影する発光部と、(r)撮像光学系を介し対象物からの光パルスの反射光を受光する受光領域、Nを3以上の正の整数とし受光領域で光電変換された信号電荷をN個の電荷移動経路に沿って順に振り分け転送するN個の電荷振分ゲート、信号電荷以外の電荷を受光領域から排出する電荷排出ゲート、N個の電荷振分ゲートに沿って転送された信号電荷をそれぞれ蓄積するN個の電荷蓄積領域、発光部に制御信号を供給し且つN個の電荷振分ゲート及び電荷排出ゲートのそれぞれに順次駆動信号を供給する駆動回路を集積化した固体撮像装置と、(s)撮像光学系を制御し、且つ読出増幅回路を経由した信号を入力し対象物までの距離の算出を含む演算を実施する論理演算回路と、(t) 論理演算回路が出力した値から、N個の電荷振分ゲートの内の特定の電荷振分ゲートに割り当てられる電荷蓄積時間を、逐次伸張する信号を生成し、駆動回路に供給する制御演算回路を有するカメラであることを要旨とする。
本発明の第3の態様は、対象物に光パルスを投影する発光部、対象物からの光パルスの反射光を受光する受光領域、 Nを3以上の正の整数とし受光領域で光電変換された信号電荷をN個の電荷移動経路に沿って順に振り分け転送するN個の電荷振分ゲート、信号電荷以外の電荷を受光領域から排出する電荷排出ゲート、N個の電荷振分ゲートに沿って転送された信号電荷をそれぞれ蓄積するN個の電荷蓄積領域、発光部に制御信号を供給し、且つN個の電荷振分ゲート及び電荷排出ゲートのそれぞれに順次駆動信号を供給する駆動回路、N個の電荷蓄積領域に蓄積された信号電荷をそれぞれ独立に読み出す読出増幅回路を備える測距装置の駆動調整方法に関する。本発明の第3の態様に係る駆動調整方法は、 (u)読出増幅回路を経由した信号を入力し、対象物までの距離の算出を含む演算をするステップと、(v)演算の結果から、N個の電荷振分ゲートの内の特定の電荷振分ゲートに割り当てられる電荷蓄積時間を、逐次伸張する信号を生成し、駆動回路に供給するステップを含む。
本発明によれば、遠景の線形性が改善され、且つ測距範囲が拡大された測距装置、この測距装置を搭載したカメラ、及び測距装置の駆動調整方法を提供できる。
次に、図面を参照して、本発明の第1~第6の実施の形態を説明する。第1~第6の実施形態に係る図面の記載において、同一又は類似の部分には同一又は類似の符号を付している。但し、図面は模式的なものであり、厚みと平面寸法との関係、各部材の厚みの比率等は現実のものとは異なることに留意すべきである。したがって、具体的な厚みや寸法は以下の説明を参酌して判断すべきものである。又、図面相互間においても互いの寸法の関係や比率が異なる部分が含まれていることは勿論である。
又、第1~第6の実施形態は、本発明の技術的思想を具体化するための装置や方法を例示するものであって、本発明の技術的思想は、回路素子や回路ブロックの構成や配置、或いは半導体チップ上でのレイアウト等を下記のものに特定するものでない。本発明の技術的思想は、請求の範囲に記載された請求項が規定する技術的範囲内において、種々の変更を加えることができる。
尚、以下の第1~第6の実施形態の説明では、第1伝導型をp型、第2伝導型をn型として説明するが、第1伝導型をn型、第2伝導型をp型としても、電気的な極性を反対にすれば同様な効果が得られることは容易に理解できるであろう。この場合、パルス波形のハイレベルとローレベルも、当業者の技術常識に応じて、適宜反転する必要が発生する場合もあることは勿論である。
例えば、以下の図1では、説明の便宜上、複数の画素(測距素子)が画素アレイ部に2次元マトリクス状に配置された3D撮像装置を基礎とする測距装置を示すが、単なる例示に過ぎない。画素アレイ部に1次元的に測距素子が画素として配列されたラインセンサのレイアウトでも構わない。又、画素アレイ部に単一の測距素子のみが配置された単純な構造の距離センサであっても構わない。
(第1の実施形態)
本発明の第1の実施形態に係る測距装置は、図1に示すように、画素アレイ部(X11~X1m;X21~X2m;……;Xn1~Xnm)と周辺回路部(71,72,74~77,94~96,NC1~NCm)とを同一の半導体チップ上に集積化した2次元イメージセンサ(3D撮像装置)を基礎とする。画素アレイ部(X11~X1m;X21~X2m;……;Xn1~Xnm)には、2次元マトリクス状に多数の画素Xij(i=1~m,j=1~n;m,nはそれぞれ2以上の正の整数である。)が配列されており、方形状の撮像領域を構成している。
本発明の第1の実施形態に係る測距装置は、図1に示すように、画素アレイ部(X11~X1m;X21~X2m;……;Xn1~Xnm)と周辺回路部(71,72,74~77,94~96,NC1~NCm)とを同一の半導体チップ上に集積化した2次元イメージセンサ(3D撮像装置)を基礎とする。画素アレイ部(X11~X1m;X21~X2m;……;Xn1~Xnm)には、2次元マトリクス状に多数の画素Xij(i=1~m,j=1~n;m,nはそれぞれ2以上の正の整数である。)が配列されており、方形状の撮像領域を構成している。
そして、この画素アレイ部(X11~X1m;X21~X2m;……;Xn1~Xnm)の上辺部には駆動回路94が、下辺部には水平シフトレジスタ96が、それぞれ画素行X11~X1m;X21~X2m;……;Xn1~Xnm方向に沿って設けられ、画素アレイ部の右辺部には画素列X11~Xn1;X12~Xn2;……;X1j~Xnj;……;X1m~Xnm方向に沿って垂直シフトレジスタ及び垂直走査回路95が設けられている。駆動回路94には各画素Xijが測距素子として距離測定を行うに必要な光を繰り返しパルス信号として投影する発光部91が接続されている。
この駆動回路94にはインターフェイス76を介して制御演算回路(CPU)74から駆動回路94を制御する制御信号が伝達される。制御演算回路74には、制御演算回路74での一連の動作を命令するプログラムを記憶したプログラム記憶装置77と、制御演算回路74における論理演算に必要なデータやしきい値等を記憶するデータ記憶装置72が接続される。制御演算回路74には更に、制御演算回路74における論理演算の結果を出力する出力部75が接続されている。データ記憶装置72には画素アレイ部(X11~X1m;X21~X2m;……;Xn1~Xnm)からの出力信号を、出力バッファ97,98を介して入力し、距離画像の形成に必要な対象物までの距離の算出を含む演算を実施する論理演算回路71が接続されている。尚、図1において、画素Xn1に内部構造をブロック図として模式的に例示したように、それぞれの画素Xijは、光電変換素子と信号電荷転送部を備える信号生成部81及びソースフォロア型の読出増幅回路82等を含む。論理演算回路71は、直前に測定した信号から暗時相当出力を算出する演算の他、後述する式(5)を用いて、図1に示した対象物92と画素アレイ部(X11~X1m;X21~X2m;……;Xn1~Xnm)との推定距離Lの算出等の演算処理を実施する。
駆動回路94、水平シフトレジスタ96、垂直シフトレジスタ及び垂直走査回路95によって画素アレイ部内の画素Xijが順次走査され、画素信号の読み出しや電子シャッタ動作が実行される。即ち、本発明の第1の実施形態に係る測距装置では、画素アレイ部を各画素行X11~X1m;X21~X2m;……;Xn1~Xnm単位で垂直方向に走査することにより、各画素行X11~X1m;X21~X2m;……;Xn1~Xnmの画素信号を各画素列X11~Xn1;X12~Xn2;……;X1j~Xnj;……;X1m~Xnm毎に設けられた垂直出力信号線によって読み出す構成となっている。尚、図1では、論理演算回路71、インターフェイス76、制御演算回路74、プログラム記憶装置77、データ記憶装置72及び出力部75が同一半導体チップに集積された構造が示されているが、単なる例示に過ぎない。図1に示したトポロジやレイアウトに限定されず、論理演算回路71、インターフェイス76、制御演算回路74、プログラム記憶装置77、データ記憶装置72及び出力部75の少なくとも一部の回路等が別々のチップや基板に搭載される態様でも構わない。
測距素子としての各画素X11~X1m;X21~X2m;……;Xn1~Xnmからの信号読み出しについては、概ね通常のCMOSイメージセンサと同様である。但し、各画素X11~X1m;X21~X2m;……;Xn1~Xnmのそれぞれのフォトダイオードからの信号電荷転送させるための第1駆動信号G1,第2駆動信号G2,第3駆動信号G3は、駆動回路94から全画素X11~X1m;X21~X2m;……;Xn1~Xnmに同時に与えられ、しかも高い周波数の信号であるので、その期間には、スイッチングノイズが発生する。したがって画素部からの信号読み出しは、ノイズ処理回路NC1~NCmによる処理が終了した後に読み出し期間を設けて行う。
制御演算回路74は、図2に論理的に示すように、時間設定論理回路741、時間設定値出力制御回路742、距離画像出力制御回路743、設定値判定回路744及びシーケンス制御回路745をハードウェア資質として備える。時間設定論理回路741は、後述する図6に示す光投影時間To及び第1電荷蓄積時間Ta1、第2電荷蓄積時間Ta2、第3電荷蓄積時間Ta3の値等を設定し、或いは、設定値判定回路744の出力信号に応じて、時間設定論理回路741は、後述する図6に示す光投影時間To及び第1電荷蓄積時間Ta1、第2電荷蓄積時間Ta2、第3電荷蓄積時間Ta3の値等を適宜変更する論理回路である。この際、時間設定論理回路741は、転送ゲートに印加する第1駆動信号G1,第2駆動信号G2,第3駆動信号G3が図6に示すように、オフセット時間を挟んだ異なるタイミングとなるように時間設定をする。
時間設定値出力制御回路742は、時間設定論理回路741が設定若しくは変更した繰り返し周期時間Tc、光投影時間To、第1電荷蓄積時間Ta1、第2電荷蓄積時間Ta2、第3電荷蓄積時間Ta3、及び電荷転送時間Ton等をインターフェイス76を介して駆動回路94に制御信号として出力する論理回路である。
距離画像出力制御回路743は、設定値判定回路744がOKと判定した場合、論理演算回路71が算出した距離の検出値を距離画像のデータとして合成し、出力部75に出力する論理回路である。
設定値判定回路744は、論理演算回路71が直前に測定し算出された暗時相当出力もしくは距離の検出値とその前のタイミングで測定され算出された暗時相当出力もしくは距離の検出値の差が、データ記憶装置72に予め格納されたしきい値を下回るか否かを判定し、判定結果を時間設定論理回路741又は距離画像出力制御回路743に出力する論理回路である。
シーケンス制御回路745は時間設定論理回路741、時間設定値出力制御回路742、距離画像出力制御回路743、設定値判定回路744、インターフェイス76、プログラム記憶装置77及びデータ記憶装置72のそれぞれの動作をクロック信号に依拠して順次シーケンス制御する論理回路である。時間設定論理回路741、時間設定値出力制御回路742、距離画像出力制御回路743、設定値判定回路744及びシーケンス制御回路745のそれぞれはバス736を介して情報の送受信が可能である。
図1の右側のブロック図に示した、CPU74を含むコンピュータシステムの構成に該当する部分において、データ記憶装置72は、複数のレジスタ、複数のキャッシュメモリ、主記憶装置、補助記憶装置を含む一群の内から適宜選択された任意の組み合わせとすることも可能である。又、キャッシュメモリは1次キャッシュメモリと2次キャッシュメモリの組み合わせとしてもよく、更に3次キャッシュメモリを備えるヒエラルキーを有しても構わない。図示を省略しているが、データ記憶装置72に複数のレジスタが含まれる場合等においては、バス736はインターフェイス76、プログラム記憶装置77及びデータ記憶装置72等にまで延長されていても構わない。
図2に示した制御演算回路74は、マイクロチップとして実装されたマイクロプロセッサ(MPU)等を使用してコンピュータシステムを構成することが可能である。又、コンピュータシステムを構成する制御演算回路74として、算術演算機能を強化し信号処理に特化したデジタルシグナルプロセッサ(DSP)や、メモリや周辺回路を搭載し組込み機器制御を目的としたマイクロコントローラ(マイコン)等を用いてもよい。或いは、現在の汎用コンピュータのメインCPUを制御演算回路74に用いてもよい。
更に、制御演算回路74の一部の構成又はすべての構成をフィールド・プログラマブル・ゲート・アレイ(FPGA)のようなプログラマブル・ロジック・デバイス(PLD)で構成してもよい。PLDによって、制御演算回路74の一部又はすべてを構成した場合は、データ記憶装置72は、PLDを構成する論理ブロックの一部に含まれるメモリブロック等のメモリ要素として構成することができる。更に、制御演算回路74は、CPUコア風のアレイとPLD風のプログラム可能なコアを同じチップに搭載した構造でもよい。このCPUコア風のアレイは、予めPLD内部に搭載されたハードマクロCPUと、PLDの論理ブロックを用いて構成したソフトマクロCPUを含む。つまりPLDの内部においてソフトウェア処理とハードウェア処理を混在させた構成でもよい。
第1の実施形態に係る測距装置のそれぞれの画素X11~X1m;X21~X2m;……;Xn1~Xnm内の信号生成部81として機能する部分の平面構造の一例を図3に示す。又、図3に示す平面構造の断面構造の一例を図4に示す。図4は、図3のレイアウト図のIV-IV方向から見た断面図である。開口部42以外を遮光された埋込フォトダイオードに、埋込フォトダイオードの受光領域で光電変換された信号電荷を転送する第1の電荷振分ゲート(31a,31b)、第2の電荷振分ゲート(32a,32b)、第3の電荷振分ゲート(33a,33b)及び電荷排出ゲート(34a,34b)が電界制御電極対として接続されている。
第1の電荷振分ゲート(31a,31b)、第2の電荷振分ゲート(32a,32b)、第3の電荷振分ゲート(33a,33b)及び電荷排出ゲート(34a,34b)は、受光領域を囲む位置において、ゲート絶縁膜33上に受光領域の中心位置から第1電荷蓄積領域23a、第2電荷蓄積領域23b、第3電荷蓄積領域23c及び電荷排出領域23dのそれぞれに向かって対角線方向に伸びる電荷移動経路の両側に対をなす電界制御電極対として配置されている。図1の発光部91から繰り返しパルス信号として投影(照射)された光は、対象物92で反射され、図3の受光領域の周辺を覆う遮光膜41の開口部42を介して受光領域に入射する。即ち、光電変換素子の受光領域は、遮光膜41の開口部42を介して入射したパルス光を光信号として受光し、この光信号を信号電荷に変換し、第1の電荷振分ゲート(31a,31b)、第2の電荷振分ゲート(32a,32b)、及び第3の電荷振分ゲート(33a,33b)の3方向に信号電荷を振り分ける。
第1の実施形態に係る測距装置の画素内の信号生成部81として機能する部分は、図3の平面図、及び図4の断面図に示すように、p型の半導体からなる機能基体層20、機能基体層20の上部の一部に設けられたn型の表面埋込領域22、及び表面埋込領域22の表面に接して設けられた、p+型のピニング層29を含む光電変換領域(29,22)と、光電変換領域(29,22)上に設けられたゲート絶縁膜33を含む。そして、光電変換領域(29,22)の中央部を受光領域としている。図3の平面図に示すように、受光領域を囲むように受光領域の中心位置に関して対称となる4つの位置のそれぞれに互いに離間して設けられた、機能基体層20よりも高不純物密度でn+型の第1電荷蓄積領域23a、第2電荷蓄積領域23b、第3電荷蓄積領域23c及び電荷排出領域23dを備える。
各画素を構成している光電変換素子の第1の電荷振分ゲート(31a,31b)は、フック状(鉤型)の第1静電誘導電極31aと、フック状の第2静電誘導電極31bとを対角線方向に伸びる電荷移動経路を、互いに島状に挟んで互いに対峙させた電極ペア(電界制御電極対)である。第1静電誘導電極31aに所定の駆動電圧を印加した状態においては、左上に向かう対角線方向に伸びる電荷移動経路の信号電荷に対する電位障壁の高さが低下し、電荷移動経路の導通状態を補助する横方向電界制御による電位分布が実現できる。第2静電誘導電極31bに所定の駆動電圧を印加した状態においても、対角線方向に伸びる電荷移動経路の信号電荷に対する電位障壁の高さが低下し、電荷移動経路の導通状態を補助する電位分布が実現できる。
第2の電荷振分ゲート(32a,32b)は、フック状の第3静電誘導電極32aと、フック状の第4静電誘導電極32bとを左下に向かう対角線方向に伸びる電荷移動経路を、互いに島状に挟んで互いに対峙させた電極ペアである。第3の電荷振分ゲート(33a,33b)は、フック状の第5静電誘導電極33aと、フック状の第6静電誘導電極33bとを右上方向に向かう対角線方向に伸びる電荷移動経路を、互いに島状に挟んで互いに対峙させた電極ペアである。電荷排出ゲート(34a,34b)は、フック状の第7静電誘導電極34aと、フック状の第8静電誘導電極34bとを右下に向かう対角線方向に伸びる電荷移動経路を、互いに島状に挟んで互いに対峙させた電極ペアである。
図3の平面図から分かるように、第1電荷蓄積領域23a、第2電荷蓄積領域23b、第3電荷蓄積領域23c及び電荷排出領域23dの配置トポロジは、受光領域の中心位置に関して4回回転対称である。図3に示すように、第1の実施形態に係る測距装置の画素は、更に、受光領域を囲む周辺部に、機能基体層20よりも高不純物密度でn型の電荷排出補助領域27a,27b,27c,27dが、互いに離間して設けられている。
第1静電誘導電極31aと第2静電誘導電極31bは、第1電荷蓄積領域23aに向かう電荷移動経路の両側に、鏡像関係で対向配置されている。第3静電誘導電極32aと第4静電誘導電極32bは、第2電荷蓄積領域23bに向かう電荷移動経路の両側に、鏡像関係で対向配置されている。第5静電誘導電極33aと第6静電誘導電極33bは、第3電荷蓄積領域23cに向かう電荷移動経路の両側に、鏡像関係で対向配置されている。第7静電誘導電極34aと第8静電誘導電極34bは、電荷排出領域23dに向かう電荷移動経路の両側に、鏡像関係で対向配置されている。
第1の実施形態に係る測距装置の画素は、図6に示すように、それぞれ電界制御電極対を構成する第1の電荷振分ゲート(31a,31b)、第2の電荷振分ゲート(32a,32b)、第3の電荷振分ゲート(33a,33b)及び電荷排出ゲート(34a,34b)に対し第1駆動信号G1、第2駆動信号G2、第3駆動信号G3及び排出駆動信号GDを電界制御パルスとして、周期的に印加し、表面埋込領域22の空乏化電位を交互に変化させることにより、電荷移動経路のいずれかに、電荷を輸送する方向に向かう電位勾配を交互に形成して、表面埋込領域22中で発生及び収集された信号電荷の移動先を第1電荷蓄積領域23a、第2電荷蓄積領域23b、第3電荷蓄積領域23c及び電荷排出領域23dのいずれかに順次設定するように制御する。
又、図3に示すように周辺部に電荷排出補助領域27a,27b,27c,27dを設けてあるので、電荷移動経路を設定する際に用いる第1電位レベルの第1駆動信号G1,第2駆動信号G2,第3駆動信号G3,排出駆動信号GDより大きな第2電位レベルの電荷排出パルスを第1の電荷振分ゲート(31a,31b)に印加することにより、第1の電荷排出補助領域27a及び第4の電荷排出補助領域27dに、背景光(環境光)等に起因した測距に対するノイズ電流成分となる電荷を排出することができる。
同様に、第2電位レベルの電荷排出パルスを第2の電荷振分ゲート(32a,32b)に印加することにより、第2の電荷排出補助領域27b及び第1の電荷排出補助領域27aに測距に対するノイズ電流成分となる電荷を排出することができる。又、第2電位レベルの電荷排出パルスを第3の電荷振分ゲート(33a,33b)に印加することにより、第3の電荷排出補助領域27c及び第4の電荷排出補助領域27dに測距に対するノイズ電流成分となる電荷を排出することができる。更に、第2電位レベルの電荷排出パルスを電荷排出ゲート(34a,34b)に印加することにより、第2の電荷排出補助領域27b及び第3の電荷排出補助領域27cに測距に対するノイズ電流成分となる電荷を排出することができる。例えば第1駆動信号G1,第2駆動信号G2,第3駆動信号G3,排出駆動信号GDの電圧を2.0Vとした場合に、電荷排出パルスとしての第2電位レベルの電圧を5V程度に設定すればよい。
第1の実施形態に係る測距装置の画素では、受光領域の中心で互いにクロスするX型を構成するように電荷移動経路が設定される。それぞれの電荷移動経路を横断する方向に、静電誘導効果で電界制御を行う第1の電荷振分ゲート(31a,31b)及び第2の電荷振分ゲート(32a,32b),第3の電荷振分ゲート(33a,33b),電荷排出ゲート(34a,34b)によって、受光領域で発生した光電子を、X型を構成する電荷移動経路に沿って、X字の4つの方向に電界制御により高速に移動させて、電荷変調を行うことができる。
第1の実施形態に係る測距装置の画素において、受光領域で発生した電子を、X字をなす電荷移動経路に沿って、図3の左上方向に移動させ、第1の電荷振分ゲート(31a,31b)の間を通過させる場合は、第2の電荷振分ゲート(32a,32b)、第3の電荷振分ゲート(33a,33b)及び電荷排出ゲート(34a,34b)を、それぞれゼロバイアス(接地電位GND)として、第1の電荷振分ゲート(31a,31b)に第1駆動信号G1=2.0Vの第1電界制御パルスを与えれば、表面埋め込み領域22から第1電荷蓄積領域23aに向かう左上がりの対角方向に沿って電位勾配が形成される。
逆に、受光領域で発生した電子を、X字をなす電荷移動経路沿って、図3の右下方向に移動させ、電荷排出ゲート(34a,34b)の間を通過させる場合は、第1の電荷振分ゲート(31a,31b)、第2の電荷振分ゲート(32a,32b)及び第3の電荷振分ゲート(33a,33b)をゼロバイアス(接地電位GND)として、電荷排出ゲート(34a,34b)に排出駆動信号GD=2.0Vのパルスを与えれば右下方向に向かう電位勾配が形成される。
図5は、図1に示した第1の実施形態に係る測距装置の制御演算回路74に関連する動作の概略を示すフローチャートであり、図6及び図7は、図5に示したフローチャートの流れとなるプログラムに従って駆動方法が変化する駆動タイミング図を例示した図である。
図6は、第1の実施形態に係る測距装置の調整時の動作を説明する駆動タイミング図である。第1の電荷振分ゲート(31a,31b)に与える第1駆動信号G1、第2の電荷振分ゲート(32a,32b)に与える第2駆動信号G2、及び第3の電荷振分ゲート(33a,33b)に与える第3駆動信号G3のパルスのオン/オフ周期は初期状態(i=0)において同じであり、それぞれ互いに第1電荷蓄積時間Ta1、第2電荷蓄積時間Ta2、第3電荷蓄積時間Ta3の値に応じてずらしてある。電荷排出ゲート(34a,34b)に与える排出駆動信号GDのオン時間は第1駆動信号G1、第2駆動信号G2、第3駆動信号G3のパルスよりも長い。排出駆動信号GDのパルスが、オン/オフする期間が繰り返し周期時間(Tc)である。
図6に示すとおり投影光は、第1駆動信号G1との関係で第2駆動信号G2のパルスに割り当てられる第2電荷蓄積時間Ta2に同期している。第2駆動信号G2のパルスに割り当てられる第2電荷蓄積時間Ta2及び第3駆動信号G3のパルスに割り当てられる第3電荷蓄積時間Ta3の間に受信光が得られる領域で距離測定ができる。排出駆動信号GDは、第3駆動信号G3のパルスに割り当てられる第3電荷蓄積時間Ta3以降の受信光が距離測定のノイズにならないように光電子を排出するための電荷排出ゲート(34a,34b)に与えられるパルスである。第1駆動信号G1は、背景光(環境光)や暗電流等を排除(オフセット)するためのパルスの電圧であり、排出駆動信号GDのパルス印加後の第1電荷蓄積時間Ta1が割り当てられている。
即ち、図3に示すような3方向振分構造を有する測距用光電変換素子において、第1の電荷振分ゲート(31a,31b)を通り電荷蓄積領域23aに転送され蓄積された信号電荷Q1、第2の電荷振分ゲート(32a,32b)を通り電荷蓄積領域23bに転送され蓄積された信号電荷Q2と、第3の電荷振分ゲート(33a,33b)を通り電荷蓄積領域23cに転送され蓄積された信号電荷Q3とすると、電荷蓄積領域23bに蓄積されるべき真の信号電荷Q2real(a)は、図6に示す駆動タイミング図では、
Q2real(a) = Q2-Q1 ……(1)
で与えられる。
Q2real(a) = Q2-Q1 ……(1)
で与えられる。
又、電荷蓄積領域23cに蓄積されるべき真の信号電荷Q3real(a)は、
Q3real(a) = Q3-Q1alpha-ef. ……(2)
で与えられる。ここで電荷蓄積領域23aに転送され蓄積される実効信号電荷Q1alpha-ef.は、αを第1駆動信号G1との関係で第3駆動信号G3のパルスに割り当てられる第3電荷蓄積時間Ta3の伸張割合を示す係数として、
Q1alpha-ef. =α×Q1 ……(3)
で与えられる。
Q3real(a) = Q3-Q1alpha-ef. ……(2)
で与えられる。ここで電荷蓄積領域23aに転送され蓄積される実効信号電荷Q1alpha-ef.は、αを第1駆動信号G1との関係で第3駆動信号G3のパルスに割り当てられる第3電荷蓄積時間Ta3の伸張割合を示す係数として、
Q1alpha-ef. =α×Q1 ……(3)
で与えられる。
式(1)及び(2)から分かるように、図6の駆動タイミング図で、最初に電荷を振り分ける第1の電荷振分ゲート(31a,31b)を環境光の除去専用に用いることにより、環境光除去能力が高くなる。よって第1の実施形態に係る測距装置は、室外や明るい室内等、環境光の影響が大きい環境での使用に適していることが分かる。
左右の2方向に信号を振り分けるTOF型の光電変換素子による推定距離Lは、以下の式(4)で与えられることが知られている。即ち、右側の第1転送電極を通り右側の電荷蓄積領域に転送され蓄積された信号電荷をQ1、左側の第2転送電極を通り左側の電荷蓄積領域に転送され、蓄積された信号電荷をQ2とすると、2方向振分型の光電変換素子の推定距離Lは、
L=(cTo/2)(Q2/(Q1+Q2)) ……(4)
で与えられる。ここで、cは光速、Toは、パルス光の光投影時間(パルス幅)である。
L=(cTo/2)(Q2/(Q1+Q2)) ……(4)
で与えられる。ここで、cは光速、Toは、パルス光の光投影時間(パルス幅)である。
一方、3方向振分構造を有する第1の実施形態に係る測距用光電変換素子による推定距離Lは、式(1)及び(2)を考慮すると、式(4)を変形し以下の式(5)で与えられることが分かる:
L=(cTo/2)(Q3real(a)/(Q2real(a)+ Q3real(a)))…(5)
L=(cTo/2)(Q3real(a)/(Q2real(a)+ Q3real(a)))…(5)
第1電荷蓄積領域23aには、図3に示すように、第1補助キャパシタC1と、図示されていないが、第1のソースフォロア増幅トランジスタSF1とが表面配線等を介して接続されている。同様に、第2電荷蓄積領域23bには第2補助キャパシタC2と、第2のソースフォロア増幅トランジスタSF2とが、第3電荷蓄積領域23cには第3補助キャパシタC3と、第3のソースフォロア増幅トランジスタSF3とが接続されている。電荷排出領域23dには電源VDDが接続されている。
図2に示した第1の実施形態に係る測距装置の制御演算回路74の動作の概略は図5に示すようなフローチャートの流れの手順で説明できる。図5のステップS101において、制御演算回路74の時間設定論理回路741が第1電荷蓄積時間Ta1=第2電荷蓄積時間Ta2=第3電荷蓄積時間Ta3に設定する。設定された第1電荷蓄積時間Ta1、第2電荷蓄積時間Ta2、第3電荷蓄積時間Ta3を、時間設定値出力制御回路742が図1に示したインターフェイス76を介して駆動回路94に制御信号として出力する。制御演算回路74の時間設定値出力制御回路742から駆動回路94を通して与えられた制御信号に応じて、発光部91から、パルス発光がなされる。パルス発光は、例えば、近赤外LD(レーザダイオード)や近赤外LEDが用いられる。対象物92を反射したパルス光が、レンズ93やBPF(バンドパスフィルタ)などを通して図1に示した画素アレイ部(X11~X1m;X21~X2m;……;Xn1~Xnm)に照射される。
引き続き、ステップS102において、画素アレイ部(X11~X1m;X21~X2m;……;Xn1~Xnm)の各画素Xijは、受光により生成された電子(光電子)を、制御演算回路74の時間設定論理回路741から駆動回路94を通して与えられた制御信号に応じて動作し、出力信号を出力バッファ97.98を介して論理演算回路71に送る。ステップS102では論理演算回路71が、画素アレイ部(X11~X1m;X21~X2m;……;Xn1~Xnm)の各画素Xijから出力された信号に応じて、式(5)を用いて距離を算出する演算を行い、距離測定をする。ステップS102では、論理演算回路71が更に、距離算出及び付帯する演算結果を、制御演算回路74の時間設定論理回路741に送る。
図5のステップS103において、制御演算回路74の時間設定論理回路741が第3電荷蓄積時間Ta3を伸張する。設定された第1電荷蓄積時間Ta1、第2電荷蓄積時間Ta2、第3電荷蓄積時間Ta3を、時間設定値出力制御回路742が図1に示したインターフェイス76を介して駆動回路94に制御信号として再度出力する。制御演算回路74の時間設定値出力制御回路742から駆動回路94を通して与えられた制御信号に応じて、発光部91から、パルス発光がなされる対象物92を反射したパルス光が、レンズ93やBPFなどを通して図1に示した画素アレイ部(X11~X1m;X21~X2m;……;Xn1~Xnm)に再度照射される。
そして、ステップS104において、画素アレイ部(X11~X1m;X21~X2m;……;Xn1~Xnm)の各画素Xijは、受光により生成された電子を、制御演算回路74の時間設定論理回路741から駆動回路94を通して与えられた制御信号に応じて動作し、出力信号を出力バッファ97.98を介して論理演算回路71に送る。ステップS104では論理演算回路71が、画素アレイ部(X11~X1m;X21~X2m;……;Xn1~Xnm)の各画素Xijから出力された信号に応じて、式(5)を用いて距離を算出する演算を行い、距離測定をし、距離算出及び付帯する演算結果を時間設定論理回路741に再度送る。
図5のステップS105において、設定値判定回路744は、ステップS104において論理演算回路71が直前に測定し算出された暗時相当の第3信号電荷Q3と、ステップS102等のステップS104よりも一つ前のタイミングで測定され算出された暗時相当の第3信号電荷Q3の差が、データ記憶装置72に予め格納されたしきい値を下回るか否かを判定する。若しくは、ステップS104において論理演算回路71が直前に測定し算出された距離の検出値と、ステップS102等のステップS104よりも一つ前のタイミングで測定され算出された距離の検出値の差が、データ記憶装置72に予め格納されたしきい値を下回るか否かを判定する。ここで、「暗時相当」とは、式(1)及び(2)を用いて計算することによって、環境光の影響を排除することを指す。
ステップS105において、設定値判定回路744がしきい値を下回らない(Yes)と判断した場合は、制御演算回路74の時間設定論理回路741へデータを渡す。時間設定論理回路741は、図3のステップS106において、制御演算回路74の時間設定論理回路741が第3電荷蓄積時間Ta3を伸張したのち、ステップS104に戻り、再度の距離測定をする。以下ステップS104からステップS105、ステップS106を経てステップS104に戻るループ処理が、ステップS105で設定値判定回路744がしきい値を下回る(No)と判断するまで、繰り返される。
図5のステップS104からステップS105、ステップS106を経てステップS104に戻るループ処理に伴い、第3電荷蓄積時間Ta3が逐次伸張される駆動タイミング図が図6に示されている。即ち、図6では、制御演算回路74の内部で、シーケンス制御回路745の命令に従い、i=0~8まで第3電荷蓄積時間Ta3が逐次伸張されるループが繰り返され、i=8でしきい値を下回る暗時相当のG3出力となる第3電荷蓄積時間Ta3が得られた例を示している。
図7も同様に、ステップS104からステップS105、ステップS106を経てステップS104に戻るループ処理が、i=0~11,12、……とシーケンス制御回路745の命令で繰り返され、第3電荷蓄積時間Ta3が逐次伸張される様子を示している。図7も図5のフローチャートに基づいたタイミング図であるが、図6と同様、i=8でしきい値を下回る暗時相当の第3信号電荷Q3となる第3電荷蓄積時間Ta3が得られている。しかし、第3電荷蓄積時間Ta3に対する暗時相当の第3信号電荷Q3の変化を確認するために、第3電荷蓄積時間Ta3を伸張させる回数を8回に限定せず、距離測定を行っている。このときの第3電荷蓄積時間Ta3に対する暗時相当の第3信号電荷Q3の変化を図13(a)に示す。
図13(a)に示すように、第3電荷蓄積時間Ta3の値が大きくなるにしたがって、暗時相当の第3信号電荷Q3は、ある特定の漸近値に漸近的に近づくように増大している。例えば図13(a)に示す漸近値に近いi=8のときの第3信号電荷Q3の値を「しきい値」に選定してもよい。一方、図13(b)に示すように、第3電荷蓄積時間Ta3の変化に対する、暗時相当の第3信号電荷Q3の微分値(=ΔG3/Δt)をプロットして、しきい値を決定してもよい。
図13(b)の縦軸の微分値ΔG3/Δtを定義するΔtは時間(第3電荷蓄積時間Ta3)の変化量である。即ち、図13(b)において、i=0とi=8の間に位置する第3信号電荷Q3の増加量(微分値)の特定の値を「しきい値」と定義することが可能である。図13(b)に示した微分値の変化でしきい値を決めた場合は、i=0のときの第3電荷蓄積時間Ta3に対する暗時相当の第3信号電荷Q3の増加量はしきい値より大きい。iが8以上のとき、暗時相当の第3信号電荷Q3の増加量はしきい値より小さくなっている。
そして、設定値判定回路744がしきい値を下回る(No)と判断すれば、制御演算回路74の距離画像出力制御回路743が出力部75へデータを渡し、出力部75から出力信号が出力され図5に示した処理が終了する。
[参考技術]
図8に本発明に至る前の段階で本発明者が検討した参考技術に係る測距装置の動作の概略を示すフローチャートを示す。図8に示す参考技術は、特許文献1等に記載された従来の3分岐型ロックインピクセルの問題点を改善する目的の技術である。参考技術も図2に示したハードウェア資源と同様な各種の論理回路を有する構成の制御演算回路74の処理に従う。図8に示すフローチャートの流れに対応する駆動タイミング図が、図9である。
図8に本発明に至る前の段階で本発明者が検討した参考技術に係る測距装置の動作の概略を示すフローチャートを示す。図8に示す参考技術は、特許文献1等に記載された従来の3分岐型ロックインピクセルの問題点を改善する目的の技術である。参考技術も図2に示したハードウェア資源と同様な各種の論理回路を有する構成の制御演算回路74の処理に従う。図8に示すフローチャートの流れに対応する駆動タイミング図が、図9である。
図8のステップS901において、制御演算回路74の時間設定論理回路741が光投影時間Toを最大値に設定する。引き続き、ステップS902において、時間設定論理回路741が繰り返し周期時間Tcを最大値に設定する。設定された光投影時間To及び繰り返し周期時間Tcを、時間設定値出力制御回路742が図1に示したインターフェイス76を介して駆動回路94に制御信号として出力する。制御演算回路74の時間設定値出力制御回路742から駆動回路94を通して与えられた制御信号に応じて、発光部91から、パルス発光がなされる。対象物92を反射したパルス光が、レンズ93やBPFなどを通して図1に示した画素アレイ部(X11~X1m;X21~X2m;……;Xn1~Xnm)に照射される。
図8のステップS903において、画素アレイ部の各画素Xijは、受光により生成された電子(光電子)を、制御演算回路74の時間設定論理回路741から駆動回路94を通して与えられた制御信号に応じて動作し、出力信号を出力バッファ97.98を介して論理演算回路71に送る。この際、図9に示すように、第1駆動信号G1,第2駆動信号G2,第3駆動信号G3,排出駆動信号GDがオフセット時間を挟んだ異なるタイミングで、それぞれ印加される。ステップS903では論理演算回路71が、各画素Xijから出力された信号に応じて、式(3)のα=1として式(5)を用いて距離を算出する演算を行い、距離測定をする。
それぞれが電界制御電極対である第1の電荷振分ゲート(31a,31b)及び第2の電荷振分ゲート(32a,32b),第3の電荷振分ゲート(33a,33b),電荷排出ゲート(34a,34b)間に定義される電荷移動経路を通る信号電荷の違いにより、論理演算回路71が、式(3)のα=1として式(5)を用いて距離を算出する演算を実行する。ステップS903では、論理演算回路71が更に、距離算出の演算結果を、制御演算回路74の時間設定論理回路741に送る。
図8のステップS904において、制御演算回路74の設定値判定回路744が、論理演算回路71から出力された距離算出の演算結果に対して、駆動設定が適切かどうかの判定を行う。ステップS904において、設定値判定回路744がイエス(Yes)と判断した場合は、制御演算回路74の時間設定論理回路741へデータを渡す。時間設定論理回路741は、図8のステップS905において、光投影時間Toを短縮する。引き続き、ステップS906において、時間設定論理回路741が繰り返し周期時間Tcを短縮する。
光投影時間To及び繰り返し周期時間Tcが短縮され、駆動方法が変更された制御信号が、図1に示した駆動回路94を介し、発光部91及び画素アレイ部に渡され、図8のステップS903において距離が測定される。以下ステップS903、ステップS904、ステップS905、ステップS906を経てステップS903に戻るループ処理が、ステップS904で設定値判定回路744が否(No)と判断するまで、繰り返される。そして、設定値判定回路744が否(No)と判断すれば、ステップS907において制御演算回路74の距離画像出力制御回路743が出力部75へデータを渡し、出力部75から出力信号が出力される。
図8及び図9に示したように、参考技術に係る測距装置では測定距離に応じて、光投影時間To及び繰り返し周期時間Tcを変更して距離精度を向上させることができる。しかし、図8及び図9に示した参考技術に係る測距装置においては、第1電荷蓄積時間Ta1=第2電荷蓄積時間Ta2=第3電荷蓄積時間Ta3=光投影時間To=一定であるが、図10の破線に示すような実際の距離に対する推定距離Lの線形性が崩れる問題がある。図10は、光投影時間To=第1電荷蓄積時間Ta1=第2電荷蓄積時間Ta2=第3電荷蓄積時間Ta3=34ns、片道光路長=5.1mの設定条件の場合の実測例である。理想的には5m程の線形性が得られる条件であるが、図10の破線に示す実測結果では、実際の距離が3m程度から対応する推定距離Lの線形性が崩れてきている。
図8及び9に示した参考技術に係る測距装置の駆動方法では、図6及び図7のi=0のときの暗時相当の第3信号電荷Q3を、距離算出の演算に用いており、その結果図10の破線に示すように遠景の線形性が崩れる。第1の実施形態に係る測距装置の駆動方法によると、i=8のときの暗時相当の第3信号電荷Q3を距離を算出する演算に用いており、図10の太い実線に示すように、距離が3.5mでの測距データの線形性が図中の矢印のように回復していることが分かる。
図11は、参考技術に係る測距装置で実際の距離に対する測定距離の線形性が崩れる理由となる光電子の挙動を説明する模式図である。図11の遮光膜41の開口部42を通り過ぎた光(光子)は、機能基体層20内で吸収されて、光電子(電子)を発生する。機能基体層20内で、光(光子)は、表面から指数関数的に吸収され、1対1で光電子を発生するが、図11では、説明を簡単にするために、比較的浅く、表面に近い表面埋込領域22と、機能基体層20の比較的深い(表面から遠い)ところで発生した2つの光電子とその挙動を示している。
機能基体層20の比較的浅いところで発生した光電子は、機能基体層20の該当箇所にかかる電界によってドリフト輸送される。光電子は、p型の機能基体層20とn型の表面埋込領域22が生成する空乏層の電位最深部に瞬時に移動して待機する。そののち、図3に示した第1の電荷振分ゲート(31a,31b)を構成する電界制御電極対間に定義される電荷移動経路の電位が下がれば、光電子は第1電荷蓄積領域23aへと移動し、第1電荷蓄積領域23aに貯まる信号となる。
又、機能基体層20の比較的浅いところで発生した光電子はp型の機能基体層20とn型の表面埋込領域22が生成する空乏層の電位最深部に瞬時に移動して待機する。図3に示した電荷排出ゲート(34a,34b)を構成する電界制御電極対間に定義される電荷移動経路の電位が下がれば、光電子は電荷排出領域23dへと移動し、図示していない電源(VDD)に排出される。
機能基体層20の比較的深いところで発生した光電子は、機能基体層20の比較的深いところに電界がかかっていないため、図11に模式的に示したように、しばらくの間ランダムウォークする。その後、機能基体層20の内部の電界がかかる位置に到達すると、電界ドリフトによって、p型の機能基体層20とn型の表面埋込領域22が生成する空乏層の電位最深部に瞬時に移動して待機する。そののち、第1の電荷振分ゲート(31a,31b)を構成する電界制御電極対間に定義される電荷移動経路の電位が下がれば、第1電荷蓄積領域23aへと移動し、第1電荷蓄積領域23aに貯まる信号となる。
又、機能基体層20の比較的深いところで発生した光電子はしばらくの間ランダムウォークしたのち、p型の機能基体層20とn型の表面埋込領域22が生成する空乏層の電位最深部に瞬時に移動して待機する。電荷排出ゲート(34a,34b)を構成する電界制御電極対間に定義される電荷移動経路の電位が下がれば、光電子は電荷排出領域23dへと移動し、図示していない電源(VDD)に排出される。
図12は、参考技術に係る測距装置の問題点を引き起こす主メカニズムのイメージを過渡応答波形の形でまとめた図である。図12(a)が、理想状態を示している。図12(a)で、Toは光投影時間、Tdは受信光の遅延時間、Taeffは電荷蓄積に必要な時間である。理想的な矩形投影パルス光が出射されれば、距離に応じて遅延時間Tdだけ遅れて、投影パルス光と同じ形をした受信光が返ってくる。そして、返ってきた受信光が、遮光膜41の開口部42を介して参考技術に係る測距装置の受光部に照射されれば、やはり、同じ形をした矩形の光電子分布が得られる。
図12(b)は、図11に示した機能基体層20内の光電子の挙動を考慮した状態を示している。図12(b)においても、Toは光投影時間、Tdは受信光の遅延時間、Taeffは電荷蓄積に必要な時間であり、Toeffは実効的な光投影時間である。たとえ理想的な矩形投影パルス光が出射され、距離に応じて遅延時間Tdだけ遅れて、投影パルス光と同じ形をした受信光が返ってきても、返ってきた受信光が、参考技術に係る測距装置の受光部に照射されたのち、光電変換されると、その光電変換された位置の拡がりによって、第1電荷蓄積領域23a、第2電荷蓄積領域23b、第3電荷蓄積領域23c等に収集される時間がバラツキ、遅れていくことを示している。
-第1の実施形態の変形例-
第1の実施形態に係る測距装置においては、第3電荷蓄積時間Ta3を伸張させ、環境光の時間線形補正を行うため、環境光による第3電荷蓄積領域23c及び第3補助キャパシタC3のそれぞれの電荷蓄積量の和が、蓄積時間に比例して大きくなる。これにより、第3電荷蓄積領域23c及び第3補助キャパシタC3のそれぞれの電荷蓄積量の和で、画素が飽和する場合が多くなる。このことを改善するためには、第3電荷蓄積領域23c及び第3補助キャパシタC3のそれぞれの電荷蓄積量の和を、第1電荷蓄積領域23a及び第1補助キャパシタC1のそれぞれの電荷蓄積量の和、並びに第2電荷蓄積領域23b及び第2補助キャパシタC2のそれぞれの電荷蓄積量の和よりも大きくなるように設計すればよい。
第1の実施形態に係る測距装置においては、第3電荷蓄積時間Ta3を伸張させ、環境光の時間線形補正を行うため、環境光による第3電荷蓄積領域23c及び第3補助キャパシタC3のそれぞれの電荷蓄積量の和が、蓄積時間に比例して大きくなる。これにより、第3電荷蓄積領域23c及び第3補助キャパシタC3のそれぞれの電荷蓄積量の和で、画素が飽和する場合が多くなる。このことを改善するためには、第3電荷蓄積領域23c及び第3補助キャパシタC3のそれぞれの電荷蓄積量の和を、第1電荷蓄積領域23a及び第1補助キャパシタC1のそれぞれの電荷蓄積量の和、並びに第2電荷蓄積領域23b及び第2補助キャパシタC2のそれぞれの電荷蓄積量の和よりも大きくなるように設計すればよい。
(第2の実施形態)
第2の実施形態に係る測距装置の構成の一例は、第1及び第1の実施形態の変形例に係る測距装置と同様、図1~4で示される。図14は、第2の実施形態に係る測距装置における過渡応答の波形を模式的に示す図である。第1及び第1の実施形態の変形例に係る測距装置における図14に対応する図は図12(b)に示される。第1及び第1の実施形態の変形例において、投影光の波形の歪みは考慮されていない。しかしながら実際は、図14に示すように、投影光自体に遅れや、波形の歪みが生じる。受信光は、被写体までの距離の分だけ遅れて入射する。光電子は、第1及び第1の実施形態の変形例において述べた理由により、受信光波形よりも更に遅れ、波形の歪みが生じる。
第2の実施形態に係る測距装置の構成の一例は、第1及び第1の実施形態の変形例に係る測距装置と同様、図1~4で示される。図14は、第2の実施形態に係る測距装置における過渡応答の波形を模式的に示す図である。第1及び第1の実施形態の変形例に係る測距装置における図14に対応する図は図12(b)に示される。第1及び第1の実施形態の変形例において、投影光の波形の歪みは考慮されていない。しかしながら実際は、図14に示すように、投影光自体に遅れや、波形の歪みが生じる。受信光は、被写体までの距離の分だけ遅れて入射する。光電子は、第1及び第1の実施形態の変形例において述べた理由により、受信光波形よりも更に遅れ、波形の歪みが生じる。
図15に、第2の実施形態に係る測距装置の制御演算回路74の動作の概略をフローチャートで示す。フロー実施時の測距値は後述する式(6)~(9)による補正によって環境光の影響を排除できるが、フロー実施時は、環境光の影響を避ける方が簡便であり、精度を高めることができるので、暗時環境下で測定を行うことが望ましい。
図15のステップS201において、制御演算回路74の時間設定論理回路741が第1電荷蓄積時間Ta1=第2電荷蓄積時間Ta2=第3電荷蓄積時間Ta3に設定する。設定された第1電荷蓄積時間Ta1、第2電荷蓄積時間Ta2、第3電荷蓄積時間Ta3を、時間設定値出力制御回路742が図1に示したインターフェイス76を介して駆動回路94に制御信号として出力する。制御演算回路74の時間設定値出力制御回路742から駆動回路94を通して与えられた制御信号に応じて、発光部91から、パルス発光がなされる。
引き続き、ステップS202において、画素アレイ部(X11~X1m;X21~X2m;……;Xn1~Xnm)の各画素Xijは、受光により生成された電子(光電子)を、制御演算回路74の時間設定論理回路741から駆動回路94を通して与えられた制御信号に応じて動作し、出力信号を出力バッファ97.98を介して論理演算回路71に送る。論理演算回路71が、画素アレイ部(X11~X1m;X21~X2m;……;Xn1~Xnm)の各画素Xijから出力された信号に応じて、後述する式(6)~(9)を用いて距離を算出する演算を行い、距離測定をする。ステップS202では、論理演算回路71が更に、距離算出の演算結果を、制御演算回路74の時間設定論理回路741に送る。
図15のステップS203において、設定値判定回路744は、暗時相当の第1信号電荷Q1が、データ記憶装置72に予め格納されたしきい値を上回らないか否かを判定する。但し、1回目の測定で否(No)となることはない。図16に示すように、第2電荷蓄積領域23bに電荷を蓄積するタイミングに同期させて発光させており、発光時間が必ず第2電荷蓄積領域23bに電荷を蓄積するタイミングから遅れ、更に受光時間は発光時間よりも遅れるため、初期設定において暗時相当の第1信号電荷Q1がしきい値を超えることはない。
ステップS203において、設定値判定回路744がイエス(YES)と判断した場合は、制御演算回路74の時間設定論理回路741へデータを渡す。時間設定論理回路741は、図15のステップS204において、制御演算回路74の時間設定論理回路741が第1電荷蓄積時間Ta1を伸張したのち、ステップS202において距離測定をする。以下ステップS202、ステップS203、ステップS204を経てステップS202に戻るループ処理が、ステップS203で設定値判定回路744が否(No)と判断するまで、繰り返される。そして、設定値判定回路744が否(No)と判断すれば、ステップS205において、制御演算回路74の時間設定論理回路741が第1電荷蓄積時間Ta1を1サイクル以上前の、暗時相当の第1信号電荷Q1がしきい値を超えなかったときの値まで縮小し、処理が終了する。
第2の実施形態に係る測距装置による推定距離Lは、以下の式(6)~(9)で表される:
Q2real(b)= Q2-Q1beta-ef. ……(6)
Q3real(b)= Q3-Q1beta-ef. ……(7)
Q1beta-ef.=β×Q1 ……(8)
L=(cTo/2)(Q3real(b)/(Q2real(b)+ Q3real(b))) …(9)
ここで、βは、第1電荷蓄積時間Ta1の伸張割合である。第2の実施形態に係る測距装置においては、図2に示した制御演算回路74の時間設定論理回路741を用いて第1電荷蓄積時間Ta1を伸張させることができるので、式(6)~(9)に示すように、第1電荷蓄積時間Ta1の伸張割合βによる環境光の時間線形補正を行えばよい。
Q2real(b)= Q2-Q1beta-ef. ……(6)
Q3real(b)= Q3-Q1beta-ef. ……(7)
Q1beta-ef.=β×Q1 ……(8)
L=(cTo/2)(Q3real(b)/(Q2real(b)+ Q3real(b))) …(9)
ここで、βは、第1電荷蓄積時間Ta1の伸張割合である。第2の実施形態に係る測距装置においては、図2に示した制御演算回路74の時間設定論理回路741を用いて第1電荷蓄積時間Ta1を伸張させることができるので、式(6)~(9)に示すように、第1電荷蓄積時間Ta1の伸張割合βによる環境光の時間線形補正を行えばよい。
図16は、図15のフローチャートに基づいたタイミング図である。i=0からi=4まで第1電荷蓄積時間Ta1を伸張し、i=4で暗時相当の第1信号電荷Q1がしきい値を超えた例である。図16に示す例では、図15に示すフローチャートのステップS205のときに、第1電荷蓄積時間Ta1をi=2のときの値に縮小している。i=2のときの値に縮小したのは、各種バラツキを考慮し、より安全な状況に向けてマージンを取っているためである。
このシーケンスで重要なことは、距離情報シグナルとなる受信光が環境光補正に用いる第1電荷蓄積時間Ta1には受信されないこと、及び第1電荷蓄積時間Ta1が終了する時間が出来るだけ受信光入射開始時期に近いことである。こうすることにより、短距離側の測距できる最短距離は変化しないが、第2電荷蓄積時間Ta2及びTa3を十分使えるようになるため、測距範囲を拡大できる。
-第2の実施形態の変形例-
第2の実施形態に係る測距装置においては、第1電荷蓄積時間Ta1を伸張させ、環境光の時間線形補正を行うため、環境光による第1電荷蓄積領域23a及び第1補助キャパシタC1のそれぞれの電荷蓄積量の和が、蓄積時間に比例して大きくなる。これにより、第1電荷蓄積領域23a及び第1補助キャパシタC1のそれぞれの電荷蓄積量の和で、画素が飽和する場合が多くなる。このことを改善するためには、第1電荷蓄積領域23a及び第1補助キャパシタC1のそれぞれの電荷蓄積量の和を、第2電荷蓄積領域23b及び第2補助キャパシタC2のそれぞれの電荷蓄積量の和、並びに第3電荷蓄積領域23c及び第3補助キャパシタC3のそれぞれの電荷蓄積量の和よりも大きくなるように設計すればよい。
第2の実施形態に係る測距装置においては、第1電荷蓄積時間Ta1を伸張させ、環境光の時間線形補正を行うため、環境光による第1電荷蓄積領域23a及び第1補助キャパシタC1のそれぞれの電荷蓄積量の和が、蓄積時間に比例して大きくなる。これにより、第1電荷蓄積領域23a及び第1補助キャパシタC1のそれぞれの電荷蓄積量の和で、画素が飽和する場合が多くなる。このことを改善するためには、第1電荷蓄積領域23a及び第1補助キャパシタC1のそれぞれの電荷蓄積量の和を、第2電荷蓄積領域23b及び第2補助キャパシタC2のそれぞれの電荷蓄積量の和、並びに第3電荷蓄積領域23c及び第3補助キャパシタC3のそれぞれの電荷蓄積量の和よりも大きくなるように設計すればよい。
(第3の実施形態)
第3の実施形態に係る測距装置の構成の一例は、第1及び第2の実施形態に係る測距装置と同様、図1~4で示される。図17は、第3の実施形態に係る測距装置における過渡応答の波形を模式的に示す図である。図18は、第3の実施形態に係る測距装置の制御演算回路74の動作の概略示すフローチャートである。図19は、図18のフローチャートに基づいたタイミング図である。図17に示す波形は、測距したい被写体が最短距離にある状態を示している。図18のフローチャートは、図15のフローチャートに第2電荷蓄積時間Ta2を伸張するフローが追加されている。追加した第2電荷蓄積時間Ta2を伸張するフローは、第1の実施形態に係る測距装置の第3電荷蓄積時間Ta3を伸張するフローと概ね同様である。即ち、第3の実施形態は第1の実施形態と第2の実施形態を組み合わせたものであり、遠景の線形性の改善と、測距範囲の拡大を同時に実現することができる。
第3の実施形態に係る測距装置の構成の一例は、第1及び第2の実施形態に係る測距装置と同様、図1~4で示される。図17は、第3の実施形態に係る測距装置における過渡応答の波形を模式的に示す図である。図18は、第3の実施形態に係る測距装置の制御演算回路74の動作の概略示すフローチャートである。図19は、図18のフローチャートに基づいたタイミング図である。図17に示す波形は、測距したい被写体が最短距離にある状態を示している。図18のフローチャートは、図15のフローチャートに第2電荷蓄積時間Ta2を伸張するフローが追加されている。追加した第2電荷蓄積時間Ta2を伸張するフローは、第1の実施形態に係る測距装置の第3電荷蓄積時間Ta3を伸張するフローと概ね同様である。即ち、第3の実施形態は第1の実施形態と第2の実施形態を組み合わせたものであり、遠景の線形性の改善と、測距範囲の拡大を同時に実現することができる。
図18のフローチャートの実施時の測距値は、以下の式(10)~(14)による補正によって環境光の影響を排除できる。しかし、図18のフローチャートの実施時は、環境光の影響を避ける方が簡便であり、精度を高めることができるので、暗時環境下で測定を行うことが望ましい。第3の実施形態に係る測距装置による推定距離Lは、以下の式(10)~(14)で表される:
Q2real(c)= Q2-Q1beta-ef. ……(10)
Q3real(c)= Q3-Q1gamma-ef. ……(11)
Q1beta-ef.=β×Q1 ……(12)
Q1gamma-ef.=γ×Q1 ……(13)
L=(cTo/2)(Q3real(c)/(Q2real(c)+ Q3real(c)))…(14)
ここで、βは第1電荷蓄積時間Ta1の伸張割合であり、γは第3電荷蓄積時間Ta3の伸張割合である。第3の実施形態に係る測距装置では、図2に示した制御演算回路74の時間設定論理回路741を用いて第1電荷蓄積時間Ta1及び第3電荷蓄積時間Ta3を伸張させることができるので、式(10)~(14)に示すように、第1電荷蓄積時間Ta1の伸張割合β及び第3電荷蓄積時間Ta3の伸張割合γで環境光の時間線形補正を行えばよい。
Q2real(c)= Q2-Q1beta-ef. ……(10)
Q3real(c)= Q3-Q1gamma-ef. ……(11)
Q1beta-ef.=β×Q1 ……(12)
Q1gamma-ef.=γ×Q1 ……(13)
L=(cTo/2)(Q3real(c)/(Q2real(c)+ Q3real(c)))…(14)
ここで、βは第1電荷蓄積時間Ta1の伸張割合であり、γは第3電荷蓄積時間Ta3の伸張割合である。第3の実施形態に係る測距装置では、図2に示した制御演算回路74の時間設定論理回路741を用いて第1電荷蓄積時間Ta1及び第3電荷蓄積時間Ta3を伸張させることができるので、式(10)~(14)に示すように、第1電荷蓄積時間Ta1の伸張割合β及び第3電荷蓄積時間Ta3の伸張割合γで環境光の時間線形補正を行えばよい。
従来、各々の電荷蓄積時間はすべて同じ長さにしていた。それに対して第3の実施形態においては、各々の電荷蓄積時間をすべて互いに異なる値にしており、測距演算式の修正は、各々の電荷蓄積時間に対して線形補正するのみでよい。即ち、本発明のイメージセンサ画素の駆動においては、各々の電荷蓄積時間を必ずしもすべて同じにする必要はなく、状況に応じて、各々の電荷蓄積時間を最適となるよう変化させてもよい。
-第3の実施形態の変形例-
第3の実施形態においては、第1電荷蓄積時間Ta1及び第3電荷蓄積時間Ta3を伸張させ、環境光の時間線形補正を行うため、環境光による第1電荷蓄積領域23a及び第1補助キャパシタC1のそれぞれの電荷蓄積量の和及び第3電荷蓄積領域23c及び第3補助キャパシタC3のそれぞれの電荷蓄積量の和が、蓄積時間に比例して大きくなる。これにより、第1電荷蓄積領域23a及び第1補助キャパシタC1のそれぞれの電荷蓄積量の和及び第3電荷蓄積領域23c及び第3補助キャパシタC3のそれぞれの電荷蓄積量の和で、画素が飽和する場合が多くなる。このことを改善するためには、第1電荷蓄積領域23a及び第1補助キャパシタC1のそれぞれの電荷蓄積量の和及び第3電荷蓄積領域23c及び第3補助キャパシタC3のそれぞれの電荷蓄積量の和を、第2電荷蓄積領域23b及び第2補助キャパシタC2のそれぞれの電荷蓄積量の和よりも大きくなるように設計すればよい。
第3の実施形態においては、第1電荷蓄積時間Ta1及び第3電荷蓄積時間Ta3を伸張させ、環境光の時間線形補正を行うため、環境光による第1電荷蓄積領域23a及び第1補助キャパシタC1のそれぞれの電荷蓄積量の和及び第3電荷蓄積領域23c及び第3補助キャパシタC3のそれぞれの電荷蓄積量の和が、蓄積時間に比例して大きくなる。これにより、第1電荷蓄積領域23a及び第1補助キャパシタC1のそれぞれの電荷蓄積量の和及び第3電荷蓄積領域23c及び第3補助キャパシタC3のそれぞれの電荷蓄積量の和で、画素が飽和する場合が多くなる。このことを改善するためには、第1電荷蓄積領域23a及び第1補助キャパシタC1のそれぞれの電荷蓄積量の和及び第3電荷蓄積領域23c及び第3補助キャパシタC3のそれぞれの電荷蓄積量の和を、第2電荷蓄積領域23b及び第2補助キャパシタC2のそれぞれの電荷蓄積量の和よりも大きくなるように設計すればよい。
(第4の実施形態)
第4の実施形態に係る測距装置の画素の主要部の断面図を図21に示す。画素の主要部は、p型の半導体からなる機能基体層20、機能基体層20の上部の一部に設けられたn型の表面埋込領域22、及び表面埋込領域22の表面に接して設けられた、p+型のピニング層29を含む光電変換領域(29,22)と、光電変換領域(29,22)上に設けられたゲート絶縁膜33を含む。そして、光電変換領域(29,22)の中央部を受光領域としている。光電変換領域(29,22)を囲むように光電変換領域(29,22)の中心位置に関して対称となる2つの位置のそれぞれに互いに離間して設けられた、機能基体層20よりも高不純物密度でn+型の第1電荷蓄積領域23pが第1浮遊ドレイン領域FD1として、第2電荷蓄積領域23qが第2浮遊ドレイン領域FD2として配置されている。
第4の実施形態に係る測距装置の画素の主要部の断面図を図21に示す。画素の主要部は、p型の半導体からなる機能基体層20、機能基体層20の上部の一部に設けられたn型の表面埋込領域22、及び表面埋込領域22の表面に接して設けられた、p+型のピニング層29を含む光電変換領域(29,22)と、光電変換領域(29,22)上に設けられたゲート絶縁膜33を含む。そして、光電変換領域(29,22)の中央部を受光領域としている。光電変換領域(29,22)を囲むように光電変換領域(29,22)の中心位置に関して対称となる2つの位置のそれぞれに互いに離間して設けられた、機能基体層20よりも高不純物密度でn+型の第1電荷蓄積領域23pが第1浮遊ドレイン領域FD1として、第2電荷蓄積領域23qが第2浮遊ドレイン領域FD2として配置されている。
遮光膜41によって開口部以外を遮光された領域に2つの電荷振分ゲートである第1電荷振分ゲート54p(G1)、第2電荷振分ゲート54q(G2)がゲート絶縁膜33を有する絶縁ゲート型トランジスタ構造の機構を構成するように接続されている。それぞれの電荷振分ゲートを構成する絶縁ゲート型トランジスタのドレイン領域として第1電荷蓄積領域23p及び第2電荷蓄積領域23qが接続されている。第1電荷蓄積領域23p及び第2電荷蓄積領域23qのそれぞれには、図示していないが第1補助キャパシタC1及び第2補助キャパシタC2と、ソースフォロア増幅トランジスタSF1及びSF2とが表面配線等を介して接続されている。
光電変換領域(29,22)の受光領域に収集された光電子は、第1電荷振分ゲート54p、第2電荷振分ゲート54qの内の一つのチャネル(電荷移動経路)を導通状態にすると、チャネル(電荷移動経路)を導通状態にした転送ゲート電極側に接続された浮遊ドレイン領域に移動する。図21に示す撮像素子とほぼ同じ位置からパルス光を出射し、対象物92(図1参照。)からの反射光を撮像素子で受光する。受信光は、対象物92と撮像素子との間の距離に応じて、投影光を出射した時間から遅延時間Tdだけ遅れて撮像素子に入射する。投影光の光投影時間Toと、第1電荷振分ゲート54p及び第2電荷振分ゲート54qに印加する電圧パルスのオン/オフを同期させると、第1電荷振分ゲート54pに印加するパルスに合わせて第1電荷蓄積領域23pへ、第2電荷振分ゲート54qに印加するパルスに合わせて第2電荷蓄積領域23qへと、受信光の遅延時間Td、即ち測距装置と対象物92との間の距離に応じて、各々の転送ゲート電極に対応した蓄積電荷量に違いが生じ、対象物92までの距離を求めることができる。
しかし、現実には、測距装置と対象物92との間の距離に応じて生じる受信光の遅延時間Td以外に、光電変換領域(29,22)の受光領域に入射した受信光に遅れが生じる。受信光の光子は、光電変換領域(29,22)内で、表面から指数関数的に吸収され、1対1で光電子を発生するため、比較的表面に近いところで発生する光電子が、光電変換領域(29,22)の受光領域、ゲートを経由して電荷蓄積領域に到達するまでの時間には時間差が生じる。即ち、光電変換された位置の拡がりによって、光電変換領域(29,22)に収集され、ゲートを経由して電荷蓄積領域に到達する時間にバラツキが生じるため、遅れが生じる。
従来、電荷蓄積時間の長さは同じであった。第4の実施形態に係る測距装置では、遅れる光電子による距離精度の低下を考慮して、図2に示した制御演算回路74の時間設定論理回路741を用いて電荷蓄積時間を異なる長さに設定する。具体的には、第1の実施形態における駆動パルスのように、時間設定論理回路741が第2電荷蓄積領域23qへ電荷が蓄積する第2電荷蓄積時間Ta2を第1電荷蓄積領域23pへ電荷が蓄積する第1電荷蓄積時間Ta1よりも長くする。図20(b)は第4の実施形態に係る測距装置の駆動パルスを示すタイミング図であり、図20(a)は参考技術に係る測距装置の駆動パルスを示すタイミング図である。
第4の実施形態に係る測距装置において、光電変換領域(29,22)の受光領域に到達した電荷は第1電荷蓄積領域23p又は第2電荷蓄積領域23qのいずれかに転送され、蓄積している。図20(a)に記載の、参考技術に係る測距装置の駆動パルスでは、遠くにある対象物92の場合、第2電荷蓄積領域23qに入るべき電子が次の周期の第1電荷蓄積領域23pに入るため、距離精度が低下する。図20(a)に記載の、参考技術に係る測距装置の駆動パルスの場合、次の周期の第1電荷蓄積領域23pに入っていた、第2電荷蓄積領域23qに入るべき電子は、図20(b)に記載の、第4の実施形態に係る測距装置の駆動パルスでは、次の周期の第1電荷蓄積領域23pに入ることなく第2電荷蓄積領域23qに入る。
このように、参考技術に係る測距装置では、対象物が遠くにある場合、第2電荷蓄積領域23qに入るべき電子が次の周期の第1電荷蓄積領域23pに入るため、距離精度が低下するが、第4の実施形態に係る測距装置においては、図2に示した制御演算回路74の時間設定論理回路741を用いて、第2電荷蓄積時間Ta2を長くしているので、対象物が遠くにある場合でも、距離精度が低下することはない。
-第4の実施形態の変形例-
第4の実施形態の変形例に係る測距装置の画素の主要部の断面図を図23に示す。図23に示す画素主要部は、図21に示す画素の主要部の光電変換領域(29,22)の受光領域に、第3電荷振分ゲート54s(G3)が接続された構造をなしている。第3電荷振分ゲート54sには第3電荷蓄積領域23sが接続され、図示していないが第3補助キャパシタC3と、ソースフォロア増幅トランジスタSF3とが表面配線等を介して接続されている。第1電荷蓄積領域23p、第2電荷蓄積領域23q及び第3電荷蓄積領域23sには、更に、第1リセットトランジスタR1、第2リセットトランジスタR2及び第3リセットトランジスタR3がそれぞれ接続されている。
第4の実施形態の変形例に係る測距装置の画素の主要部の断面図を図23に示す。図23に示す画素主要部は、図21に示す画素の主要部の光電変換領域(29,22)の受光領域に、第3電荷振分ゲート54s(G3)が接続された構造をなしている。第3電荷振分ゲート54sには第3電荷蓄積領域23sが接続され、図示していないが第3補助キャパシタC3と、ソースフォロア増幅トランジスタSF3とが表面配線等を介して接続されている。第1電荷蓄積領域23p、第2電荷蓄積領域23q及び第3電荷蓄積領域23sには、更に、第1リセットトランジスタR1、第2リセットトランジスタR2及び第3リセットトランジスタR3がそれぞれ接続されている。
図22(b)は第4の実施形態の変形例に係る測距装置の駆動パルスを示すタイミング図であり、図22(a)は第4の実施形態に係る測距装置の駆動パルスを示すタイミング図である。参考技術に係る測距装置では、対象物が遠くにある場合では、距離精度が低下する問題があった。このため、第4の実施形態の変形例において、第3電荷振分ゲート54sの直下のチャネル(電荷移動経路)を導通状態にする際に、第3リセットトランジスタR3のチャネル(電荷移動経路)を導通状態にすることで、電荷を第3電荷蓄積領域23sに貯めることなく、第3リセットトランジスタR3のリセットドレイン領域に接続された電源に電荷は排出される。従って、第2電荷蓄積領域23qに入るべき電子が次の周期の第1電荷蓄積領域23pに入ることがなくなり、距離精度を良好に確保することができる。
(第5の実施形態)
第5の実施形態に係る測距装置の画素の主要部の平面図を図25に示す。透明電極をゲート電極としたMOS構造を用いた光電変換部を有するフォトゲート(PG)11を囲むようにフォトゲート11の中心位置に関して対称となる6つの位置のそれぞれに互いに離間して設けられた、第1電荷蓄積領域23pが第1浮遊ドレイン領域FD1として、第2電荷蓄積領域23qが第2浮遊ドレイン領域FD2として、第3電荷蓄積領域23rが第3浮遊ドレイン領域FD3として、第4電荷蓄積領域23sが浮遊ドレイン領域FD4として、第1電荷排出領域23uと第2電荷排出領域23vが電源VDDに接続されている。
第5の実施形態に係る測距装置の画素の主要部の平面図を図25に示す。透明電極をゲート電極としたMOS構造を用いた光電変換部を有するフォトゲート(PG)11を囲むようにフォトゲート11の中心位置に関して対称となる6つの位置のそれぞれに互いに離間して設けられた、第1電荷蓄積領域23pが第1浮遊ドレイン領域FD1として、第2電荷蓄積領域23qが第2浮遊ドレイン領域FD2として、第3電荷蓄積領域23rが第3浮遊ドレイン領域FD3として、第4電荷蓄積領域23sが浮遊ドレイン領域FD4として、第1電荷排出領域23uと第2電荷排出領域23vが電源VDDに接続されている。
図示していない遮光膜によって開口部以外を遮光して領域を定義されたフォトゲート11の周りを囲むように、第1電荷振分ゲート33p(G1)、第2電荷振分ゲート33q(G2)、第3電荷振分ゲート33r(G3)、第4電荷振分ゲート33s(G4)、第1電荷排出ゲート33u(GD)及び第2電荷排出ゲート33v(GD)が、それぞれ絶縁ゲート型トランジスタ構造の機構を構成する6つの転送ゲート電極として接続されている。
図示を省略しているが、第1電荷振分ゲート33p、第2電荷振分ゲート33q、第3電荷振分ゲート33r、第4電荷振分ゲート33s、第1電荷排出ゲート33u及び第2電荷排出ゲート33vの直下には、それぞれ絶縁ゲート型トランジスタを構成するゲート絶縁膜が配置されている。6つの電荷振分ゲートをそれぞれ構成する絶縁ゲート型トランジスタのドレイン領域として、第1電荷蓄積領域23p、第2電荷蓄積領域23q、第3電荷蓄積領域23r、第4電荷蓄積領域23s、第1電荷排出領域23u及び第2電荷排出領域23vが接続されている。
第1電荷蓄積領域23p、第2電荷蓄積領域23q、第3電荷蓄積領域23r及び第4電荷蓄積領域23sのそれぞれには、図示していないが第1補助キャパシタC1、第2補助キャパシタC2、第3補助キャパシタC3及び第4補助キャパシタC4が表面配線等を介してそれぞれ接続されている。更に、第1電荷蓄積領域23p、第2電荷蓄積領域23q、第3電荷蓄積領域23r及び第4電荷蓄積領域23sのそれぞれには、第1ソースフォロア増幅トランジスタSF1、第2ソースフォロア増幅トランジスタSF2、第3ソースフォロア増幅トランジスタSF3及び第4ソースフォロア増幅トランジスタSF4が表面配線等を介して接続されている。第1電荷排出領域23u及び第2電荷排出領域23vは表面配線等を介して電源に接続されている。
フォトゲート11に収集された信号電荷等は、第1電荷振分ゲート33p、第2電荷振分ゲート33q、第3電荷振分ゲート33r又は第4電荷振分ゲート33sの直下のいずれか一つのチャネル(電荷移動経路)を導通状態にすると、チャネル(電荷移動経路)が導通状態になった電荷振分ゲートに接続された浮遊ドレイン領域に移動する。一方、第1電荷排出ゲート33u又は第2電荷排出ゲート33vの直下のいずれか一つ又は両方のチャネル(電荷移動経路)を導通状態にすると、背景光(環境光)に起因した電荷等はドレインを介して電源に排出される。
図25に示す撮像素子とほぼ同じ位置からパルス光を出射し、対象物92(図1参照。)からの反射光を撮像素子で受光する。受信光は、対象物92と撮像素子との間の距離に応じて、投影光を出射した時間から遅延時間Tdだけ遅れて撮像素子に入射する。投影光の光投影時間Toと、第1電荷振分ゲート33p、第2電荷振分ゲート33q、第3電荷振分ゲート33r又は第4電荷振分ゲート33sに印加する電圧パルスのオン/オフを同期させると、第1電荷振分ゲート33pに印加するパルスに合わせて第1電荷蓄積領域23pへ、第2電荷振分ゲート33qに印加するパルスに合わせて第2電荷蓄積領域23qへ、第3電荷振分ゲート33rに印加するパルスに合わせて第3電荷蓄積領域23rへ、第4電荷振分ゲート33sに印加するパルスに合わせて第4電荷蓄積領域23sへと、受信光の遅延時間Td、即ち測距装置と対象物92との間の距離に応じて、各々の電荷振分ゲートに対応した蓄積電荷量に違いが生じ、対象物92までの距離を求めることができる。
しかし、現実には、測距装置と対象物92との間の距離に応じて生じる受信光の遅延時間Td以外に、シリコン内部でも受光領域に入射した受信光に遅れが生じる。即ち、光電変換された位置の拡がりによって、フォトゲート11に収集され、4つの電荷振分ゲートを経由して、対応するそれぞれの電荷蓄積領域に到達する時間にバラツキが生じるため、遅れが生じる。
図24(b)は第5の実施形態に係る測距装置の駆動パルスを示すタイミング図であり、図24(a)は参考技術に係る測距装置の駆動パルスを示すタイミング図である。従来、電荷蓄積時間の長さは同じであったが、遅れる信号電荷等による距離精度の低下を考慮して、電荷蓄積時間を異なる長さに設定すればよい。具体的には、図2の制御演算回路74の時間設定論理回路741を用いて、図24(b)のタイミング図に示すように、第4電荷蓄積領域23sへ電荷を蓄積する時間として割り当てられる第4電荷蓄積時間Ta4を、第1電荷蓄積領域23pへ電荷を蓄積する時間として割り当てられる第1電荷蓄積時間時間Ta1、第2電荷蓄積領域23qへ電荷を蓄積する時間として割り当てられる第2電荷蓄積時間時間Ta2、第3電荷蓄積領域23rへ電荷を蓄積する時間として割り当てられる第3電荷蓄積時間Ta3よりも長くすればよい。
第1~第5の実施形態に係る測距装置において、背景光(環境光)成分を含む信号電荷の経路となる電荷振分ゲートの数が3つの場合及び4つの場合について述べた。しかし、背景光(環境光)成分を含む信号電荷の経路となる電荷振分ゲートの数が5つより大きい場合にも、同様の議論が成り立つ。一般にはNを3以上の正の整数としてN個の電荷振分ゲートであれば、例えばN番目の電荷振分ゲートに割り当てられる電荷蓄積時間を長くすれば、第1~第5の実施形態に係る測距装置において述べたのと同様の機能と効果が実現される。
(第6の実施形態)
第6の実施形態に係る測距装置の画素の主要部の平面図を図27に、参考技術に係る測距装置の画素の主要部の平面図を図26に示す。pn接合を用いた光電変換部を有するフォトダイオード11の中心位置に関して対称となる4つの位置のそれぞれに、互いに離間して設けられた、n+型の第1電荷蓄積領域23pが第1浮遊ドレイン領域FD1として、n+型の第2電荷蓄積領域23qが第2浮遊ドレイン領域FD2として、n+型の第3電荷蓄積領域23rが第3浮遊ドレイン領域FD3として、n+型の電荷排出領域23sがドレインとして配置されている。
第6の実施形態に係る測距装置の画素の主要部の平面図を図27に、参考技術に係る測距装置の画素の主要部の平面図を図26に示す。pn接合を用いた光電変換部を有するフォトダイオード11の中心位置に関して対称となる4つの位置のそれぞれに、互いに離間して設けられた、n+型の第1電荷蓄積領域23pが第1浮遊ドレイン領域FD1として、n+型の第2電荷蓄積領域23qが第2浮遊ドレイン領域FD2として、n+型の第3電荷蓄積領域23rが第3浮遊ドレイン領域FD3として、n+型の電荷排出領域23sがドレインとして配置されている。
図示していない遮光膜によって開口部以外を遮光して領域を定義されたフォトダイオード11の周りを囲むように、4つの電荷振分ゲートである第1電荷振分ゲート54p(G1)、第2電荷振分ゲート54q(G2)、第3電荷振分ゲート54r(G3)及び電荷排出ゲート54s(GD)が配置されている。第1電荷振分ゲート54p、第2電荷振分ゲート54q、第3電荷振分ゲート54r及び電荷排出ゲート54sは、それぞれ絶縁ゲート型トランジスタ構造の機構を構成するように多結晶シリコン等の導電体薄膜でゲート電極を構成している。
それぞれの電荷振分ゲートを構成する絶縁ゲート型トランジスタのドレイン領域には、第1電荷蓄積領域23p、第2電荷蓄積領域23q、第3電荷蓄積領域23r及び電荷排出領域23sが接続されている。第1電荷蓄積領域23p、第2電荷蓄積領域23q及び第3電荷蓄積領域23rのそれぞれには、第1補助キャパシタC1、第2補助キャパシタC2及び第3補助キャパシタC3が表面配線等を介して接続されている。図26及び図27の右上に示した第1補助キャパシタC1はn+型の拡散領域25pと、拡散領域25pの上に設けられたキャパシタ絶縁膜(図示省略)と、このキャパシタ絶縁膜の上に設けられた多結晶シリコン等の導電体薄膜からなる第1キャパシタ電極38pで平行平板型のコンデンサを構成できる。
同様に、図26及び図27の右下に示した第2補助キャパシタC2はn+型の拡散領域25qと、拡散領域25qの上に設けられたキャパシタ絶縁膜(図示省略)と、このキャパシタ絶縁膜の上に設けられた多結晶シリコン等の導電体薄膜からなる第2キャパシタ電極38qで平行平板型のコンデンサを構成できる。又、図26の左上に示した第3補助キャパシタC3はn+型の拡散領域25rと、拡散領域25rの上に設けられたキャパシタ絶縁膜(図示省略)と、このキャパシタ絶縁膜の上に設けられた多結晶シリコン等の導電体薄膜からなる第3キャパシタ電極38rで平行平板型のコンデンサを構成されている。
一方、図27の左上に示した第3補助キャパシタC3は、図26の拡散領域25rより大きな面積のn+型の拡散領域25Rと、拡散領域25Rの上に設けられたキャパシタ絶縁膜(図示省略)と、このキャパシタ絶縁膜の上に設けられた多結晶シリコン等の導電体薄膜からなる第3キャパシタ電極38rで平行平板型のコンデンサを構成している。このため、図27に示した第3補助キャパシタC3は、図26に示した第3補助キャパシタC3の容量よりも約1.4倍大きい。尚、図26及び図27において、第1補助キャパシタC1の容量と第2補助キャパシタC2の容量は等しい。図26においては、第1補助キャパシタC1の容量=第2補助キャパシタC2の容量=第3補助キャパシタC3としているので、図27においては、第3補助キャパシタC3の容量は、第1補助キャパシタC1の容量の約1.4倍の大きさになっている。
拡散領域25p、拡散領域25q及び拡散領域25rの上に示した6個の白抜きの四角形は、それぞれコンタクトホールを模式的に示すものであり、コンタクトホールの上に延びる表面配線を介して、拡散領域25p、拡散領域25q及び拡散領域25rは接地電位(GND)に接続される。
更に、第1電荷蓄積領域23p、第2電荷蓄積領域23q及び第3電荷蓄積領域23rをそれぞれのソース領域として、第1ゲート電極53pを有する第1リセットトランジスタRT、第2ゲート電極53qを有する第2リセットトランジスタRT及び第3ゲート電極53rを有する3リセットトランジスタRTが構成されている。第1ゲート電極53p、第2ゲート電極53q及び第3ゲート電極53rは、多結晶シリコン等の導電体薄膜で構成できる。第1リセットトランジスタRTは、第1ゲート電極53pを介して第1電荷蓄積領域23pに対向する第1リセットドレイン(RD)領域26pを有する。第2リセットトランジスタRTは、第2ゲート電極53qを介して第2電荷蓄積領域23qに対向する第2リセットドレイン(RD)領域26qを有する。第3リセットトランジスタRTは、第3ゲート電極53rを介して第3電荷蓄積領域23rに対向する第3リセットドレイン(RD)領域26rを有する。
第1リセットドレイン領域26p、第2リセットドレイン領域26q及び第3リセットドレイン領域26rの上に示した1個の白抜きの四角形は、それぞれコンタクトホールを模式的に示すものであり、コンタクトホールの上に延びる表面配線を介して、第1リセットドレイン領域26p、第2リセットドレイン領域26q及び第3リセットドレイン領域26rは電源電位(VDD)に接続される。
更に、第1電荷蓄積領域23p、第2電荷蓄積領域23q及び第3電荷蓄積領域23rの上に示した1個の白抜きの四角形も、それぞれコンタクトホールを模式的に示すものであり、コンタクトホールの上に延びる表面配線を介して、第1電荷蓄積領域23p、第2電荷蓄積領域23q及び第3電荷蓄積領域23rは、第1ソースフォロア増幅トランジスタSF1の第1増幅ゲート電極52p、第2ソースフォロア増幅トランジスタSF2の第2増幅ゲート電極52q及び第3ソースフォロア増幅トランジスタSF3の第3増幅ゲート電極52rに、表面配線等を介して接続されている。第4電荷蓄積領域23sは、1個の白抜きの四角形で模式的に示したコンタクトホールの上を走る表面配線等を介して電源電位(VDD)に接続されている。
又、第1電荷蓄積領域23p、第2電荷蓄積領域23q及び第3電荷蓄積領域23rのそれぞれコンタクトホールの上に延びる他の表面配線を介して、第1電荷蓄積領域23p、第2電荷蓄積領域23q及び第3電荷蓄積領域23rは、第1補助キャパシタC1の第1キャパシタ電極38p、第2補助キャパシタC2の第2キャパシタ電極38q及び第3補助キャパシタC3の第3キャパシタ電極38rに接続されている。
第1ソースフォロア増幅トランジスタSF1の第1増幅ドレイン領域18p、第2ソースフォロア増幅トランジスタSF2の第2増幅ドレイン領域18q及び第3ソースフォロア増幅トランジスタSF3の第3増幅ドレイン領域18rは、それぞれ図示を省略した電源VDDに接続される。第1ソースフォロア増幅トランジスタSF1の第1増幅ソース領域21pは、画素選択用の第1選択トランジスタSL1の第1ドレイン電極に共通領域として接続されている。同様に、第2ソースフォロア増幅トランジスタSF2の第2増幅ソース領域21qは画素選択用の第2選択トランジスタSL2の第2ドレイン電極に共通領域として接続され、第3ソースフォロア増幅トランジスタSF3の第3増幅ソース領域21rは、画素選択用の第3選択トランジスタSL3の第3ドレイン電極に共通領域として接続されている。
図26及び図27に示すように、第1選択トランジスタSL1の第1選択ソース領域19pは、1個の白抜きの四角形で模式的に示したコンタクトホールを介して、第1の垂直出力信号線Sig1に接続され、第1選択トランジスタSL1の第1選択ゲート電極51pには水平ラインの選択用制御信号Sが図1に示した垂直シフトレジスタ及び垂直走査回路95から与えられる。同様に、第2選択トランジスタSL2の第2選択ソース領域19qは、1個の白抜きの四角形で模式的に示したコンタクトホールを介して、第2の垂直出力信号線Sig2に接続され、第2選択トランジスタSL2の第2選択ゲート電極51qには水平ラインの選択用制御信号Sが垂直シフトレジスタ及び垂直走査回路95から与えられる。更に、第3選択トランジスタSL3の第3選択ソース領域19rは、1個の白抜きの四角形で模式的に示したコンタクトホールを介して、第3の垂直出力信号線Sig3に接続され、第3選択トランジスタSL3の第3選択ゲート電極51rには水平ラインの選択用制御信号Sが垂直シフトレジスタ及び垂直走査回路95から与えられる。
選択用制御信号Sをハイレベルにすることにより、選択トランジスタSL1,SL2,SL3が導通し、ソースフォロア増幅トランジスタSF1,SF2、SF3で増幅された第1電荷蓄積領域23p,第2電荷蓄積領域23q,第3電荷蓄積領域23rの電位に対応する電位に第1の垂直出力信号線Sig1、第2の垂直出力信号線Sig2及び第3の垂直出力信号線Sig3がそれぞれなる。
既に述べたとおり、図26及び図27に示した平面レイアウトの違いは、図26に示す参考技術においては、第1補助キャパシタC1の容量=第2補助キャパシタC2の容量=第3補助キャパシタC3の容量であるが、図27に示す第6の実施形態に係る測距装置においては、第3補助キャパシタC3の容量>第1補助キャパシタC1の容量=第2補助キャパシタC2であることである。第1~第5の実施形態に係る測距装置において、複数の電荷振分ゲートに割り当てられる電荷蓄積時間の内、最後に割り当てられる電荷蓄積時間を長くする例を説明した。このとき、環境光により、電荷蓄積時間を長くした最後の電荷振分ゲートに接続される電荷蓄積領域と補助キャパシタに蓄積される電荷蓄積量の和が大きくなる。
最後に割り当てられる電荷蓄積時間最後に割り当てられる電荷蓄積時間に対応する電荷振分ゲートに接続される電荷蓄積領域と補助キャパシタに蓄積される電荷蓄積量の和の増大によって測距装置の画素の飽和が決定する場合が多くなる。対策として、予め最後に割り当てられる電荷蓄積時間に対応する電荷振分ゲートに接続される電荷蓄積領域と補助キャパシタに蓄積される電荷の容量の和を他の電荷振分ゲートに接続される電荷蓄積領域と補助キャパシタに蓄積される電荷の容量の和より大きく設計すればよい。
電荷蓄積領域の電荷の容量を変更するよりもキャパシタの容量を変更する方が容易であるので、補助キャパシタの容量を大きくすればよい。図27の場合、第3補助キャパシタC3は、第1補助キャパシタC1及び第2補助キャパシタC2よりも1.4倍の大きい場合を例示したが、1.4倍に限定されるものではなく、環境光の強さ等を考慮して適宜、所望の容量値に設計すればよい。
(その他の実施形態)
上記のように、本発明は第1~第6の実施形態によって記載したが、この開示の一部をなす論述及び図面は本発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施の形態、実施例及び運用技術が明らかとなろう。例えば、既に述べた第1~第6の実施形態の説明では、第1導電型をp型、第2導電型をn型として説明したが、第1導電型をn型、第2導電型をp型としても、電気的な極性を反対にすれば同様な効果が得られることは容易に理解できるであろう。
上記のように、本発明は第1~第6の実施形態によって記載したが、この開示の一部をなす論述及び図面は本発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施の形態、実施例及び運用技術が明らかとなろう。例えば、既に述べた第1~第6の実施形態の説明では、第1導電型をp型、第2導電型をn型として説明したが、第1導電型をn型、第2導電型をp型としても、電気的な極性を反対にすれば同様な効果が得られることは容易に理解できるであろう。
本発明の第1の実施形態に係る測距装置の説明では、図3を用いて本発明の「電荷振分ゲート」が一対の横方向電界制御ゲート(LEFM)のセットで構成される例を示した。そして、又、本発明の第4~第6の実施形態に係る測距装置では、電荷振分ゲートの構造がMOS型若しくはMIS型のゲート電極構造の場合を例示した。しかし、電荷振分ゲートの構造や電荷排出電極は、第1~第6の実施形態で例示したLEFMや絶縁ゲートトランジスタの電極構造等に限定されるものではない。同様な信号電荷を輸送や転送ができる機能を備える構成であればよい。第1~第4及び第6の実施形態の記載では、光電変換部は、pn接合型のフォトダイオードを構成する受光領域を用いて説明してきた。第5の実施形態の記載では、光電変換部は、透明電極をゲート電極としたMOS構造を用いたフォトゲート構造にて説明してきた。しかし、光電変換部も、フォトダイオードや、フォトゲートの構造に限定されるものではなく、その他、同様な光電変換機能を備える構成であれば、構わない。
このように、本発明はここでは記載していない様々な実施形態等を含むことは勿論である。したがって、本発明の技術的範囲は上記の説明から妥当な請求の範囲に係る発明特定事項によってのみ定められるものである。
本発明の第1~第6の実施形態に係る測距装置は、例えば図28に例示的に示すカメラ等の技術分野における3D撮像装置として利用可能である。図28に例示的に示すように、技術分野として利用可能性のあるビデオカメラ等のカメラは、単一の撮像光学系(43,44)と、撮像光学系(43,44)の光軸に沿って入射する対象物92(図1参照。)の像を撮像する第1~第6の実施形態に係る測距装置の主要部を構成する3D撮像装置45aと、オートフォーカス(AF)に用いる第1~第6の実施形態に係る測距装置を用いた距離センサ(測距素子)15を備える。
本発明を利用する可能性のあるカメラは、第1~第6の実施形態に係る測距装置の主要部を構成する3D撮像装置45aから出力された画像データをデジタルデータに変換するA/D変換回路47と、A/D変換回路47がデジタルデータに変換した画像データを格納するメモリ(半導体記憶装置)48と、メモリ48から画像データを受信する中央処理制御部(CPU)13と、中央処理制御部13を介して画像データを受信して画像データを処理する画像処理部14とを備える。そして、画像処理部14には、3D撮像装置45a及び距離センサ(測距素子)15の調整データを保存する調整データ記憶装置99extが接続され、図5,図8,図15及び図18に例示したようなフローチャートに従った調整を可能にしている。
尚、図28は例示に過ぎず、3D撮像装置45a又は距離センサ(測距素子)15が搭載される半導体チップ上に中央処理制御部13から送信された調整データを保存する調整データ記憶装置が接続され、半導体チップ上の駆動回路に調整データを供給するような構造でもよい。本発明を利用する可能性のあるカメラとしては、更に、中央処理制御部13に接続された駆動部12、メディアコントローラ等のメモリカード・インターフェイス19、操作部18、LCD駆動回路16、モータドライバ13b,13c,13d、ストロボ制御回路61を備えることができる。LCD駆動回路16にはLCDからなる表示部57が接続され、ストロボ制御回路61にはストロボ装置62が接続されている。ストロボ装置62は図1に示した発光部91を構成することが可能である。
図28に例示したカメラの中央処理制御部13は、中央処理制御部13に接続された画像処理部14、駆動部12、メモリ48,メモリカード・インターフェイス19、操作部18、LCD駆動回路16、距離センサ(測距素子)15、モータドライバ13b,13c,13d、ストロボ制御装置のそれぞれの動作や処理を制御する命令や電気信号を出力する。図示を省略しているが、中央処理制御部13には、画像処理部14、駆動部12、メモリ48,メモリカード・インターフェイス19、操作部18、LCD駆動回路16、距離センサ(測距素子)15、モータドライバ13b,13c,13d、ストロボ制御装置のそれぞれの動作をそれぞれ実行させる命令出力回路の他、オートホワイトバランス(AWB)調整を施すWB調整命令出力回路等の種々の論理回路等が論理的なハードウェア資源として組込まれている。
撮像光学系(43,44)を構成する撮影レンズ43は、図28に示すように、例えば主レンズ43aと、主レンズ43aに隣接したズームレンズ43bと、ズームレンズ43bに隣接したフォーカスレンズ43c等を備えることができる。図28に例示した構造では、ズームレンズ43bにはズームモータ49bが、フォーカスレンズ43cにはフォーカスモータ49cが接続されている。フォーカスレンズ43cと3D撮像装置45aの間には撮像光学系(43,44)を構成する絞り44が配置されている。例えば、5枚の絞り羽根からなる絞り44には、絞り羽根を駆動するアイリスモータ50が接続されている。ズームモータ49b、フォーカスモータ49c及びアイリスモータ50はステッピングモータからなり、中央処理制御部13に接続されたモータドライバ13b,13c,13dから送信される駆動パルスにより動作制御され、レリーズボタン等の操作部18からの信号により撮像準備処理を行う。
ズームモータ49bは、ズームレンズ43bを例えば20~50段階等でワイド側又はテレ側に移動させ、撮影レンズ43のズーミングを行う。フォーカスモータ49cは、対象物92からの距離やズームレンズ43bの変倍に応じてフォーカスレンズ43cを移動させ、カメラの撮像条件が最適となるように撮影レンズ43の焦点調整を行う。アイリスモータ50は、絞り44の絞り羽根を動作させて絞り44の開口面積を変化し、所望の絞り値まで適宜撮影レンズ43の露光調整を行う。
撮影レンズ43は図28に例示する構成に限定されるものではなく、例えば、カメラに対して着脱できる交換式レンズであっても構わない。撮影レンズ43は、主レンズ43a、ズームレンズ43b及びフォーカスレンズ43c等の複数の光学レンズ群から構成されることにより、対象物92からの光束をその焦点面近傍に配置された3D撮像装置45aの表面に結像させる。
第1~第6の実施形態に係る測距装置の主要部を構成する3D撮像装置45aは、ガラスやセラミックからなるチップ搭載基板(パッケージ基板)46に搭載されている。3D撮像装置45aには、タイミングジェネレータ(TG)63が接続され、タイミングジェネレータ63は駆動部12を介して中央処理制御部13に接続されている。中央処理制御部13から駆動部12を介して送られる信号により、タイミングジェネレータ63がタイミング信号(クロックパルス)を発生し、タイミング信号はチップ搭載基板46を介して3D撮像装置45aを構成する半導体チップ上に周辺回路として設けられた駆動回路からの電子シャッタ用信号として各行のピクセルに送られる。
即ち中央処理制御部13は駆動部12を介してタイミングジェネレータ63を制御し、3D撮像装置45aの電子シャッタのシャッタ速度を制御する。尚、タイミングジェネレータ63は、3D撮像装置45aを構成する半導体チップ上の周辺回路として、モノリシックに集積化しても構わない。
3D撮像装置45aを構成する半導体チップの中央の画素アレイ部から出力された撮像信号は、半導体チップの周辺部に周辺回路として設けられた相関二重サンプリング回路(CDS)に入力され、3D撮像装置45aの各ピクセルの蓄積電荷量に正確に対応したR、G、Bの画像データとして3D撮像装置45aから出力される。3D撮像装置45aから出力された画像データは、図示を省略した増幅器で増幅され、A/D変換回路47でデジタルデータに変換される。3D撮像装置45aは、駆動部12によりタイミング制御されて、3D撮像装置45aの受光面上に結像された対象物92像を画像信号に変換してA/D変換回路47へ出力する。
図示を省略しているが、図28に例示したカメラの画像処理部14は、ホワイトバランス調整に用いるWB制御量を算出するWB制御量演算回路、画面全体のG信号を積算し、又は画面中央部と周辺部とで異なる重みづけをしたG信号を積算し、その積算値を出力する自動露出(AE)検出用論理演算回路、AE検出用論理演算回路が出力した積算値からAEに必要な対象物92の明るさ(撮影Ev値)を算出する撮影Ev値算出回路、更に、階調変換処理回路、ホワイトバランス補正処理回路、γ補正処理回路等の、各種画像処理や画像処理に伴う演算を画像データに対し施す種々の論理回路(ハードウェア・モジュール)を、論理構成上のハードウェア資源として備えることも可能である。
第1の実施の形態に係る画像処理部14は、画像処理エンジン等があれば実現可能である。又、特徴量生成や識別処理に演算負荷が高い場合、ハードウェアに実装してもよい。例えば、マイクロチップとして実装されたMPU等を使用してコンピュータシステムで画像処理部14を構成することも可能である。又、コンピュータシステムを構成する画像処理部14として、算術演算機能を強化し信号処理に特化したDSPや、メモリや周辺回路を搭載し組込み機器制御を目的としたマイコン等を用いてもよい。或いは、現在の汎用コンピュータのメインCPUを画像処理部14に用いてもよい。更に、画像処理部14の一部の構成又はすべての構成をFPGAのようなPLDで構成してもよい。
11…フォトダイオード又はフォトゲート、12…駆動部、13…中央処理制御部、13b,13c,13d…モータドライバ、14…画像処理部、16…LCD駆動回路、18…操作部、18p…第1増幅ドレイン領域、18q…第2増幅ドレイン領域、18r…第3増幅ドレイン領域、19…インターフェイス、19p…第1選択ソース領域、19q…第2選択ソース領域、19r…第3選択ソース領域、20…機能基体層、21p…第1増幅ソース領域、21q…第2増幅ソース領域、21r…第3増幅ソース領域、22…表面埋込領域、23a…第1電荷蓄積領域、23b…第2電荷蓄積領域、23c…第3電荷蓄積領域、23d…電荷排出領域、23p…第1電荷蓄積領域、23q…第2電荷蓄積領域、23r…第3電荷蓄積領域、23s…第3電荷蓄積領域、23s…第4電荷蓄積領域、23u…第5電荷蓄積領域、23v…第6電荷蓄積領域、25R,25p,25q,25r…拡散領域、26p…第1リセットドレイン領域、26q…第2リセットドレイン領域、26r…第3リセットドレイン領域、27a…第1の電荷排出補助領域、27b…第2の電荷排出補助領域、27c…第3の電荷排出補助領域、27d…第4の電荷排出補助領域、29…ピニング層、31a…第1静電誘導電極、31b…第2静電誘導電極、32a…第3静電誘導電極、32b…第4静電誘導電極、33…ゲート絶縁膜、33a…第5静電誘導電極、33b…第6静電誘導電極、33p…第1電荷振分ゲート、33q…第2電荷振分ゲート、33r…第3電荷振分ゲート、33s…第4電荷振分ゲート、33u…第1電荷排出ゲート、33v…第2電荷排出ゲート、34a…第7静電誘導電極、34b…第8静電誘導電極、38p…第1キャパシタ電極、38q…第2キャパシタ電極、38r…第3キャパシタ電極、41…遮光膜、42…開口部、43…撮影レンズ、43a…主レンズ、43b…ズームレンズ、43c…フォーカスレンズ、45a…3D撮像装置、46…チップ搭載基板、47…A/D変換回路、48…メモリ、49b…ズームモータ、49c…フォーカスモータ、50…アイリスモータ、51p…第1選択ゲート電極、51q…第2選択ゲート電極、51r…第3選択ゲート電極、52p…第1増幅ゲート電極、52q…第2増幅ゲート電極、52r…第3増幅ゲート電極、53p…第1ゲート電極、53q…第2ゲート電極、53r…第3ゲート電極、54p…第1転送ゲート電極、54p…第1電荷振分ゲート、54q…第2電荷振分ゲート、54r…第3電荷振分ゲート、54s…電荷排出ゲート、57…表示部、61…ストロボ制御回路、62…ストロボ装置、63…タイミングジェネレータ、71…論理演算回路、72…データ記憶装置、736…バス、74…制御演算回路、741…時間設定論理回路、742…時間設定値出力制御回路、743…距離画像出力制御回路、744…設定値判定回路、745…シーケンス制御回路、75…出力部、76…インターフェイス、77…プログラム記憶装置、81…信号生成部、82…読出増幅回路、91…発光部、92…対象物、93…レンズ、94…駆動回路、95…垂直走査回路、96…水平シフトレジスタ、97,98…出力バッファ、99ext…調整データ記憶装置
Claims (14)
- 対象物に光パルスを投影する発光部と、
前記対象物からの前記光パルスの反射光を受光する受光領域と、
Nを3以上の正の整数とし、前記受光領域で光電変換された信号電荷を、N個の電荷移動経路に沿って順に振り分け転送するN個の電荷振分ゲートと、
前記信号電荷以外の電荷を前記受光領域から排出する電荷排出ゲートと、
N個の電荷振分ゲートに沿って転送された前記信号電荷をそれぞれ蓄積するN個の電荷蓄積領域と、
前記発光部に制御信号を供給し、且つN個の電荷振分ゲート及び前記電荷排出ゲートのそれぞれに順次、駆動信号を供給する駆動回路と、
N個の電荷蓄積領域に蓄積された信号電荷をそれぞれ独立に読み出す読出増幅回路と、
前記読出増幅回路を経由した信号を入力し、前記対象物までの距離の算出を含む演算を実施する論理演算回路と、
前記論理演算回路が出力した値から、N個の電荷振分ゲートの内の特定の電荷振分ゲートに割り当てられる電荷蓄積時間を、逐次伸張する信号を生成し、前記駆動回路に供給する制御演算回路と
を備えることを特徴とする測距装置。 - 前記駆動回路が、前記N個の電荷振分ゲート及び前記電荷排出ゲートのそれぞれに、オフセット時間を挟んだ異なるタイミングで、前記駆動信号を供給することを特徴とする請求項1に記載の測距装置。
- 前記特定の電荷振分ゲートは、前記電荷排出ゲートに印加される駆動信号の繰り返し周期で定義される繰り返し周期時間の内の、最後に割り当てられる電荷蓄積時間に対応する電荷振分ゲートであることを特徴とする請求項1又は2に記載の測距装置。
- 前記制御演算回路は、前記論理演算回路が直前に測定し算出した暗時相当の信号電荷と、一つ前のタイミングで測定され算出された暗時相当の信号電荷の差が予め決めたしきい値を下回るか否かを判定し、前記しきい値を下回らない場合は、前記特定の電荷振分ゲートに割り当てられる電荷蓄積時間を更に伸張し、前記しきい値を下回る場合は、前記伸張を終了することを特徴とする請求項3に記載の測距装置。
- 前記制御演算回路は、前記論理演算回路が直前に測定し算出された距離の検出値と、一つ前のタイミングで測定され算出された距離の検出値の差が、予め決めたしきい値を下回るか否かを判定し、前記しきい値を下回らない場合は、前記特定の電荷振分ゲートに割り当てられる電荷蓄積時間を更に伸張し、前記しきい値を下回る場合は、前記伸張を終了することを特徴とする請求項3に記載の測距装置。
- 前記N個の電荷蓄積領域のそれぞれには補助キャパシタが設けられていることを特徴とする請求項1~5のいずれか1項に記載の測距装置。
- 前記特定の電荷振分ゲートからの信号電荷を蓄積する電荷蓄積領域に接続された補助キャパシタの容量が、他の補助キャパシタの容量よりも大きいことを特徴とする請求項6に記載の測距装置。
- 撮像光学系と、
対象物に光パルスを投影する発光部と、
前記撮像光学系を介し前記対象物からの前記光パルスの反射光を受光する受光領域、Nを3以上の正の整数とし前記受光領域で光電変換された信号電荷をN個の電荷移動経路に沿って順に振り分け転送するN個の電荷振分ゲート、前記信号電荷以外の電荷を前記受光領域から排出する電荷排出ゲート、N個の電荷振分ゲートに沿って転送された前記信号電荷をそれぞれ蓄積するN個の電荷蓄積領域、前記発光部に制御信号を供給し且つN個の電荷振分ゲート及び前記電荷排出ゲートのそれぞれに順次、駆動信号を供給する駆動回路を集積化した固体撮像装置と、
前記撮像光学系を制御し、且つ前記読出増幅回路を経由した信号を入力し前記対象物までの距離の算出を含む演算を実施する論理演算回路と、
前記論理演算回路が出力した値から、N個の電荷振分ゲートの内の特定の電荷振分ゲートに割り当てられる電荷蓄積時間を、逐次伸張する信号を生成し、前記駆動回路に供給する制御演算回路と
を有することを特徴とするカメラ。 - 前記駆動回路が、前記N個の電荷振分ゲート及び前記電荷排出ゲートのそれぞれに、オフセット時間を挟んだ異なるタイミングで、前記駆動信号を供給することを特徴とする請求項8に記載のカメラ。
- 対象物に光パルスを投影する発光部、前記対象物からの前記光パルスの反射光を受光する受光領域、 Nを3以上の正の整数とし前記受光領域で光電変換された信号電荷をN個の電荷移動経路に沿って順に振り分け転送するN個の電荷振分ゲート、前記信号電荷以外の電荷を前記受光領域から排出する電荷排出ゲート、 N個の電荷振分ゲートに沿って転送された前記信号電荷をそれぞれ蓄積するN個の電荷蓄積領域、前記発光部に制御信号を供給し、且つN個の電荷振分ゲート及び前記電荷排出ゲートのそれぞれに順次、駆動信号を供給する駆動回路、N個の電荷蓄積領域に蓄積された信号電荷をそれぞれ独立に読み出す読出増幅回路を備える測距装置の駆動調整方法であって、
前記読出増幅回路を経由した信号を入力し、前記対象物までの距離の算出を含む演算をするステップと、
前記演算の結果から、N個の電荷振分ゲートの内の特定の電荷振分ゲートに割り当てられる電荷蓄積時間を、逐次伸張する信号を生成し、前記駆動回路に供給するステップと、
を含む駆動調整方法。 - 前記N個の電荷振分ゲート及び前記電荷排出ゲートのそれぞれに、オフセット時間を挟んだ異なるタイミングで前記駆動信号が供給されることを特徴とする請求項10に記載の駆動調整方法。
- 前記特定の電荷振分ゲートは、前記電荷排出ゲートに印加される駆動信号の繰り返し周期で定義される繰り返し周期時間の内の、最後に割り当てられる電荷蓄積時間に対応する電荷振分ゲートであることを特徴とする請求項10又は11に記載の駆動調整方法。
- 前記伸張する信号の生成は、直前に測定し算出した暗時相当の信号電荷と、一つ前のタイミングで測定され算出された暗時相当の信号電荷の差が予め決めたしきい値を下回るか否かを判定し、前記しきい値を下回らない場合は、前記特定の電荷振分ゲートに割り当てられる電荷蓄積時間を更に伸張し、前記しきい値を下回る場合は、前記伸張を終了することを特徴とする請求項10又は11に記載の駆動調整方法。
- 前記伸張する信号の生成は、直前に測定し算出された距離の検出値と、一つ前のタイミングで測定され算出された距離の検出値の差が、予め決めたしきい値を下回るか否かを判定し、前記しきい値を下回らない場合は、前記特定の電荷振分ゲートに割り当てられる電荷蓄積時間を更に伸張し、前記しきい値を下回る場合は、前記伸張を終了することを特徴とする請求項10又は11に記載の駆動調整方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201980067602.XA CN112888958B (zh) | 2018-10-16 | 2019-09-27 | 测距装置、摄像头以及测距装置的驱动调整方法 |
| JP2020553015A JP7428133B2 (ja) | 2018-10-16 | 2019-09-27 | 測距装置、カメラ、及び測距装置の駆動調整方法 |
| EP19872289.4A EP3839555A4 (en) | 2018-10-16 | 2019-09-27 | DISTANCE MEASURING DEVICE, CAMERA AND METHOD OF ADJUSTING THE DRIVE OF A DISTANCE MEASURING DEVICE |
| US17/228,689 US20210255286A1 (en) | 2018-10-16 | 2021-04-12 | Distance measuring device, camera, and method for adjusting drive of distance measuring device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018-195018 | 2018-10-16 | ||
| JP2018195018 | 2018-10-16 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/228,689 Continuation US20210255286A1 (en) | 2018-10-16 | 2021-04-12 | Distance measuring device, camera, and method for adjusting drive of distance measuring device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020080065A1 true WO2020080065A1 (ja) | 2020-04-23 |
Family
ID=70284492
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/038221 WO2020080065A1 (ja) | 2018-10-16 | 2019-09-27 | 測距装置、カメラ、及び測距装置の駆動調整方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20210255286A1 (ja) |
| EP (1) | EP3839555A4 (ja) |
| JP (1) | JP7428133B2 (ja) |
| CN (1) | CN112888958B (ja) |
| WO (1) | WO2020080065A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021010174A1 (ja) * | 2019-07-16 | 2021-01-21 | ソニー株式会社 | 受光装置、および、受光装置の駆動方法 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017149932A1 (ja) * | 2016-03-03 | 2017-09-08 | ソニー株式会社 | 医療用画像処理装置、システム、方法及びプログラム |
| US11741622B2 (en) | 2019-12-13 | 2023-08-29 | Sony Semiconductor Solutions Corporation | Imaging devices and multiple camera interference rejection |
| TWI757213B (zh) * | 2021-07-14 | 2022-03-01 | 神煜電子股份有限公司 | 具線性電偏移校正的近接感測裝置 |
| WO2023094308A1 (en) * | 2021-11-26 | 2023-06-01 | Sony Semiconductor Solutions Corporation | Time-of-flight circuitry and time-of-flight method |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4305011A1 (de) * | 1993-02-18 | 1994-08-25 | Deutsche Aerospace | Pulslaufzeit-Meßverfahren |
| WO2007026779A1 (ja) | 2005-08-30 | 2007-03-08 | National University Corporation Shizuoka University | 半導体測距素子及び固体撮像装置 |
| JP2010267720A (ja) * | 2009-05-13 | 2010-11-25 | Denso Corp | 受光デバイス及びその制御方法 |
| JP2015049148A (ja) * | 2013-09-02 | 2015-03-16 | 株式会社メガチップス | 距離測定装置 |
| JP2016045066A (ja) * | 2014-08-22 | 2016-04-04 | 浜松ホトニクス株式会社 | 測距方法及び測距装置 |
| WO2017022219A1 (ja) * | 2015-08-04 | 2017-02-09 | パナソニックIpマネジメント株式会社 | 固体撮像装置の駆動方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5486711A (en) * | 1993-06-25 | 1996-01-23 | Nikon Corporation | Solid-state image sensor with overlapping split gate electrodes |
| JP4235729B2 (ja) * | 2003-02-03 | 2009-03-11 | 国立大学法人静岡大学 | 距離画像センサ |
| WO2008152647A2 (en) * | 2007-06-15 | 2008-12-18 | Ben Gurion University Of The Negev Research And Development Authority | Three-dimensional imaging method and apparatus |
| EP2445008B1 (en) * | 2008-08-11 | 2015-03-04 | Honda Motor Co., Ltd. | Imaging device and image forming method |
| JP6476138B2 (ja) * | 2014-02-07 | 2019-02-27 | 国立大学法人静岡大学 | 電荷変調素子及び固体撮像装置 |
| CN107533136B (zh) * | 2015-06-24 | 2020-08-25 | 株式会社村田制作所 | 距离传感器 |
| CN107925733B (zh) * | 2015-08-04 | 2020-09-18 | 松下半导体解决方案株式会社 | 固体摄像装置 |
| US10620300B2 (en) * | 2015-08-20 | 2020-04-14 | Apple Inc. | SPAD array with gated histogram construction |
| JP6852416B2 (ja) | 2016-03-10 | 2021-03-31 | 株式会社リコー | 距離測定装置、移動体、ロボット、装置及び3次元計測方法 |
| WO2018038230A1 (ja) * | 2016-08-24 | 2018-03-01 | 国立大学法人静岡大学 | 光電変換素子及び固体撮像装置 |
| US11448757B2 (en) * | 2016-11-29 | 2022-09-20 | Nuvoton Technology Corporation Japan | Distance measuring device |
| CN112639513A (zh) * | 2018-07-02 | 2021-04-09 | 布鲁克曼科技株式会社 | 测距装置、照相机、检查调整装置、测距装置的驱动调整方法及检查调整方法 |
-
2019
- 2019-09-27 JP JP2020553015A patent/JP7428133B2/ja active Active
- 2019-09-27 EP EP19872289.4A patent/EP3839555A4/en active Pending
- 2019-09-27 CN CN201980067602.XA patent/CN112888958B/zh active Active
- 2019-09-27 WO PCT/JP2019/038221 patent/WO2020080065A1/ja unknown
-
2021
- 2021-04-12 US US17/228,689 patent/US20210255286A1/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4305011A1 (de) * | 1993-02-18 | 1994-08-25 | Deutsche Aerospace | Pulslaufzeit-Meßverfahren |
| WO2007026779A1 (ja) | 2005-08-30 | 2007-03-08 | National University Corporation Shizuoka University | 半導体測距素子及び固体撮像装置 |
| JP2010267720A (ja) * | 2009-05-13 | 2010-11-25 | Denso Corp | 受光デバイス及びその制御方法 |
| JP2015049148A (ja) * | 2013-09-02 | 2015-03-16 | 株式会社メガチップス | 距離測定装置 |
| JP2016045066A (ja) * | 2014-08-22 | 2016-04-04 | 浜松ホトニクス株式会社 | 測距方法及び測距装置 |
| WO2017022219A1 (ja) * | 2015-08-04 | 2017-02-09 | パナソニックIpマネジメント株式会社 | 固体撮像装置の駆動方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3839555A4 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021010174A1 (ja) * | 2019-07-16 | 2021-01-21 | ソニー株式会社 | 受光装置、および、受光装置の駆動方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3839555A1 (en) | 2021-06-23 |
| JP7428133B2 (ja) | 2024-02-06 |
| JPWO2020080065A1 (ja) | 2021-09-24 |
| CN112888958A (zh) | 2021-06-01 |
| CN112888958B (zh) | 2024-10-15 |
| US20210255286A1 (en) | 2021-08-19 |
| EP3839555A4 (en) | 2022-07-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2020080065A1 (ja) | 測距装置、カメラ、及び測距装置の駆動調整方法 | |
| US10690755B2 (en) | Solid-state imaging device having increased distance measurement accuracy and increased distance measurement range | |
| JP6039165B2 (ja) | 撮像素子及び撮像装置 | |
| US8159580B2 (en) | Solid-state imaging device and imaging apparatus using the same | |
| US8319874B2 (en) | Connection/separation element in photoelectric converter portion, solid-state imaging device, and imaging apparatus | |
| US7454133B2 (en) | Solid-state image sensor and automatic-focus camera using the same | |
| US9219096B2 (en) | Solid-state imaging device | |
| JP7363782B2 (ja) | 測距装置、カメラ、検査調整装置、測距装置の駆動調整方法及び検査調整方法 | |
| JP2012217059A (ja) | 固体撮像装置 | |
| KR20090086091A (ko) | 고체 촬상 장치, 고체 촬상 장치의 구동 방법 및 촬상 장치 | |
| JP5012188B2 (ja) | 固体撮像装置 | |
| JP2003198948A (ja) | 固体撮像装置および固体撮像装置の駆動方法 | |
| WO2016047474A1 (ja) | 固体撮像装置、および電子装置 | |
| JP2015207594A (ja) | 固体撮像装置 | |
| JP5187039B2 (ja) | 固体撮像装置及びこれを用いた電子カメラ | |
| WO2015170533A1 (ja) | 固体撮像装置、固体撮像装置の駆動方法、及び、電子機器 | |
| JP4375339B2 (ja) | 固体撮像装置および固体撮像装置の駆動方法 | |
| JP7358771B2 (ja) | 3d撮像ユニット、カメラ、及び3d画像生成方法 | |
| KR20170090848A (ko) | 이미지 센싱 장치 및 그의 구동 방법 | |
| US10623642B2 (en) | Image capturing apparatus and control method thereof with change, in exposure period for generating frame, of conversion efficiency | |
| JP2017108275A (ja) | 固体撮像装置、固体撮像装置の制御方法、および撮像システム | |
| JP6541513B2 (ja) | 撮像装置、および、撮像システム | |
| TWI543618B (zh) | 像素電路 | |
| JPH05161075A (ja) | 固体撮像装置 | |
| JPH05161073A (ja) | 固体撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19872289 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2020553015 Country of ref document: JP Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 2019872289 Country of ref document: EP Effective date: 20210318 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |