WO2020059493A1 - 予約装置、予約方法及び予約システム - Google Patents
予約装置、予約方法及び予約システム Download PDFInfo
- Publication number
- WO2020059493A1 WO2020059493A1 PCT/JP2019/034797 JP2019034797W WO2020059493A1 WO 2020059493 A1 WO2020059493 A1 WO 2020059493A1 JP 2019034797 W JP2019034797 W JP 2019034797W WO 2020059493 A1 WO2020059493 A1 WO 2020059493A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- robot
- operator
- information
- reservation
- work
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images







Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
- G06Q10/063—Operations research, analysis or management
- G06Q10/0631—Resource planning, allocation, distributing or scheduling for enterprises or organisations
- G06Q10/06314—Calendaring for a resource
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/02—Reservations, e.g. for tickets, services or events
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
- G06Q10/063—Operations research, analysis or management
- G06Q10/0631—Resource planning, allocation, distributing or scheduling for enterprises or organisations
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q30/00—Commerce
- G06Q30/06—Buying, selling or leasing transactions
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Information and communication technology [ICT] specially adapted for implementation of business processes of specific business sectors, e.g. utilities or tourism
- G06Q50/10—Services
Definitions
- the present invention relates to a reservation device, a reservation method, and a reservation system for reserving a robot to be used.
- Patent Literature 1 discloses a system that manages reservation data for using a robot that can be controlled via a network.
- an object of the present invention is to allow a large number of robots to reserve a robot suitable for an operation performed by an operator using the robot.
- a reservation device relates to a task indicating the content of a task to be executed using one of a plurality of robots in association with operator identification information for identifying an operator who operates the robot.
- An operator information acquisition unit for acquiring information; a selection unit for selecting a use robot to be used by the operator from the plurality of robots based on the work content indicated by the work information; and the operator identification information.
- a reservation processing unit that stores, in a storage unit, robot identification information for identifying the use robot selected by the selection unit and a reservation period for enabling the use robot.
- the selecting unit transmits, from the plurality of robots, candidate robot information indicating one or more candidate robots that can be used by the operator to an information terminal used by the operator, and receives the candidate robot information from the information terminal.
- a candidate robot selected from the one or more candidate robots may be selected as the use robot.
- the operator information acquisition unit acquires the work information indicating a place where the work is performed as the content of the work, and the selection unit selects the use robot further based on the place indicated by the work information. Is also good.
- the selection unit selects a use operation device to be used by the operator from a plurality of operation devices usable for operation of any of the plurality of robots, based on the content of the work, and the reservation processing unit
- the operator identification information, the robot identification information, the operation device identification information for identifying the use operation device selected by the selection unit, and a reservation period for enabling the use robot and the use operation device May be stored in the storage unit.
- the selection unit may select a combination of the used robot and the used operating device based on the content of the work.
- the selection unit, the information terminal used by the operator, the candidate robot information indicating one or more candidate robots that can be used by the operator, and candidate operating device information indicating one or more candidate operating devices may be transmitted and selected on the information terminal based on information indicating a result selected by the operator.
- the operator information acquiring unit may acquire position information indicating a location of the operator, and the selection unit may select the operating device to be used further based on the location indicated by the position information.
- the selecting unit from the plurality of robots, selects one or more candidate robots that can be used for the content of the work, from the plurality of operating devices, an operating device capable of operating the selected one or more candidate robots It may be selected as the use operation device.
- the operator information acquisition unit acquires, from a storage medium storing a fee, fee information indicating a robot usage fee of each of the plurality of robots and a device usage fee of each of the plurality of operation devices, and
- the selection unit obtains budget information indicating the user's budget from the operator, and based on the budget indicated by the budget information, the robot usage fee, and the device usage fee, uses the robot and the operating device. May be selected.
- the operator information obtaining unit obtains a robot usage fee of each of the plurality of robots from a storage medium storing a fee, and performs the operation on reward information indicating a reward amount obtained by the operator by the operation.
- the selection unit may select the robot to be used based on a relationship between the robot usage fee and the reward amount.
- a skill storage unit configured to store the operator's operation skill in association with the operator identification information and the robot identification information of a robot that the operator has used among the plurality of robots,
- the selection unit may select the robot to be used on condition that the operation skill of the operator corresponding to the robot to be used is at or above an allowable level by referring to the skill storage unit.
- An information providing unit that provides job recruiting information indicating a plurality of tasks for which workers are being recruited to the operator, wherein the operator information acquiring unit includes the job requisition information provided by the information providing unit;
- the information including the contents of the work selected by the operator from the work described above may be acquired as the work information.
- the selection unit when the operator information acquisition unit acquires the work information from the operator, selects the robot to be used corresponding to the content of the work indicated by the work information, the reservation processing unit, The user robot selected by the selection unit may be reserved, and a profile of the operator may be notified to a provider of the job information.
- the information processing apparatus further includes a robot information acquisition unit configured to acquire robot information indicating an operation state of the robot, wherein the selection unit selects the use robot from the plurality of robots indicated by the robot information indicating that the robot is not operating. You may.
- the robot information acquisition unit may acquire, as the robot information, operation data transmitted to the robot from an operation device used to operate the robot.
- the reservation processing unit transmits information for permitting the robot to perform an operation based on operation data transmitted to the robot from an operation device used to operate the robot during the reservation period. Is also good.
- the selection unit may select the robot to be used based on the frequency of use of the plurality of robots.
- the selection unit when detecting that the robot being operated by the operator has failed, based on the content of the work, to select another robot from the plurality of robots, the reservation processing unit,
- the reservation period stored in the storage unit in association with the failed robot may be stored in the storage unit in association with the robot identification information of the other robot selected by the selection unit.
- the reservation processing unit may notify the operator of a date and time at which the other robot can be used if there is no other robot that can be selected by the selection unit when the robot breaks down.
- the selection unit selects a second robot that can be used for other work during a time period between a plurality of works performed by the first robot as the use robot, and the reservation processing unit 134
- the robot identification information of each of the first robot and the second robot may be stored in the storage unit in association with each of the reservation periods.
- the selection unit selects the robot to be used based on a time difference between a place where the operator plans to operate the robot and a place where the robot to be operated by the operator operates. You may.
- the reservation processing unit acquires from the operator based on a time difference between a place where the operator plans to operate the robot and a place where the robot to be operated by the operator operates.
- the storage period may be stored in the storage unit, wherein the storage unit corrects the requested reservation period.
- a reservation method is a computer-implemented task executed by using one of a plurality of robots in association with operator identification information for identifying an operator who operates the robot. Acquiring work information indicating the contents of the operation; selecting a robot to be used by the operator from the plurality of robots based on the contents of the work indicated by the work information; and the operator identification information. And storing the robot identification information for identifying the selected use robot and a reservation period for enabling the use robot in the storage unit.
- a reservation system includes a reservation device for managing a reservation state of a robot, and an information terminal capable of communicating with the reservation device, wherein the reservation device transmits a plurality of robots from the information terminal.
- An operator information acquisition unit that acquires work information indicating the content of a task to be performed using one of the robots, and using the information terminal from the plurality of robots based on the content of the task indicated by the task information
- a selection unit for selecting a robot to be used by an operator to be used, and robot identification information for identifying the usage robot selected by the selection unit in a storage unit in association with identification information for identifying the operator.
- a reservation processing unit that transmits reservation information indicating a reservation period for enabling the use robot to be used to the information terminal, wherein the information terminal performs the reservation processing.
- a display unit for displaying the reservation information received from.
- FIG. 3 is a diagram illustrating a functional configuration of a reservation device.
- FIG. 3 is a diagram illustrating an example of a robot database. It is a figure showing an example of an operation device database. It is a figure showing an example of a skill database. It is a figure showing an example of a reservation screen which a selection part makes an information terminal display. It is a figure showing an example of a screen for selecting a robot.
- FIG. 4 is a diagram illustrating an operation sequence of a reservation device and an information terminal in the reservation system. It is a figure showing the composition of the reservation device concerning a modification.
- FIG. 1 is a diagram showing an outline of the reservation system S.
- the reservation system S reserves the robot 2 and the operation device 3 suitable for the work performed by the operator U from the plurality of robots 2 registered in the reservation system S in advance and the plurality of operation devices 3 for operating the robot 2. It is a system for doing.
- the robot 2 and the operation device 3 provide a teleexistence environment in which the operator U operates the robot 2 in real time while feeling as if a remote object or person is nearby.
- the robot 2 is a robot that the operator U can remotely operate through the network N using the operation device 3.
- the plurality of robots 2 include a plurality of types of robots 2 having different functions.
- the plurality of types are, for example, for shopping, for games, for sightseeing, for carrying luggage, or for sightseeing guides.
- the robot 2 having a shopping function shoots or touches a product in the store according to the operation of the operator U, and while the operator U is at a remote place, the operator U actually performs shopping. It has a configuration that makes you feel as if you are.
- the robot 2 having a shopping function includes a camera that captures an image of the surroundings, a sensor that detects tactile sensations such as temperature, pressure, and vibration when touching an object with a hand, an actuator that moves a hand and a finger, A speaker for outputting a sound emitted by the operator U, and a communication controller for transmitting a captured image generated by the camera and a signal output by the sensor to the operating device 3 and receiving the voice of the operator U and an instruction from the operating device 3 Having.
- the robot 2 having a game function performs a game at a game center in response to an operation of the operator U, and as if the operator U was actually playing a game at the game center while the operator U was at a remote place. Has a configuration to feel.
- the robot 2 having a game function may have the same function as the robot 2 having a shopping function, but may not have a speaker. It is desirable that the robot 2 having a game function has an actuator that can move a hand and a finger faster than the robot 2 having a shopping function.
- the robot 2 having a sightseeing function visits a sightseeing spot in response to the operation of the operator U, and feels as if the operator U is actually walking in the sightseeing spot while the operator U is at a remote place. It has a configuration of Specifically, the robot 2 having a sightseeing function may have the same function as the robot 2 having a shopping function, but the robot 2 has a function of traveling on a road or climbing a staircase. It is desirable to have a higher moving performance than the robot 2 having a shopping function.
- the robot 2 having the function of transporting luggage has a configuration for transporting luggage in accordance with the operation of the operator U and performing the task of transporting luggage while the operator U is at a remote location.
- the robot 2 having the function of carrying luggage may have the same function as the robot 2 having the function of shopping, but preferably has an actuator capable of lifting heavy loads.
- the robot 2 having the function of a sightseeing guide has a configuration for guiding a tourist at a sightseeing spot in response to an operation of the operator U and performing a task of guiding the tourist while the operator U is at a remote place.
- the robot 2 having the function of a sightseeing guide may have the same function as the robot 2 having a shopping function, but can guide a tourist from various countries. Further, it is desirable to have a function of translating Japanese voice spoken by the operator U into a foreign language.
- FIG. 1 illustrates a state where a plurality of robots 2 are waiting at a shopping mall A and a tourist information center B.
- the operation device 3 is a device for the operator U to control the robot 2.
- the operation device 3 specifies the operation of the operator U in a state where the operation tool is mounted, and transmits a signal indicating the specified operation to the reservation device 1.
- the operating device 3 specifies the operation of the operator U based on, for example, a signal received from a sensor included in the operating tool worn by the operator U.
- the operating device 3 may irradiate the operator U with the infrared light and specify the operation of the operator U based on the reflected light of the emitted infrared light.
- the operation device 3 may notify the operation tool worn by the operator U of the captured image received from the robot 2 via the network N and perceptual information indicating a tactile sensation.
- the captured image is displayed on a display of goggles worn by the operator U.
- the operating tool worn by the operator U on the hand, foot, arm, or the like changes the temperature or vibrates based on the perceived information. With these configurations, the operator U can experience the environment around the robot 2 at a location away from the robot 2 as if it were in the robot 2.
- the plurality of operation devices 3 include a plurality of types of operation devices 3 in which the types of the operable robots 2 are different or the functions that the robot 2 can execute are different.
- the plurality of types of the operation device 3 may be for shopping, for games, for sightseeing, for carrying luggage, for sightseeing guides, or the like, as in the case of the plurality of types of the robots 2, and may be other types.
- the operator U uses the operating device 3 installed at a desired place, such as the operating device 3 installed near the home and the operating device 3 installed near the outside. To remotely control the robot 2.
- a desired place such as the operating device 3 installed near the home and the operating device 3 installed near the outside.
- the operation device 3 may be configured to be able to be stored one set at a time in an attache case, for example. With the configuration of the operation device 3 in this manner, the operator U can easily carry the operation device 3 to a place where the operator U wants to use and then remotely control the robot 2.
- the operator U can reserve the robot 2 and the operating device 3 to be used by using the information terminal 4 that can be used by the operator U. At this time, the operator U can reserve an appropriate robot 2 and operating device 3 by inputting the contents of the operation to be performed using the robot 2.
- the information terminal 4 any electronic device having an operation unit for inputting data, a display for displaying data, and a communication controller for transmitting and receiving data, such as a computer, a smartphone, or a tablet, can be used.
- the reservation device 1 transports the robot to a place (for example, home) designated by the operator U or the like before the reservation period of the robot 2.
- a process for issuing a slip for a home delivery company may be executed.
- the reservation device 1 may also issue a transport slip at the time of return so that the return is made after the end of the reservation period.
- the configuration and operation of the reservation device 1 will be described in detail.
- FIG. 2 is a diagram illustrating a functional configuration of the reservation device 1.
- the reservation device 1 includes a communication unit 11, a storage unit 12, and a control unit 13.
- the control unit 13 includes an operator information acquisition unit 131, a robot information acquisition unit 132, a selection unit 133, and a reservation processing unit 134.
- the communication unit 11 is a communication interface for transmitting and receiving data via the network N, and includes, for example, a LAN (Local Area Network) controller.
- the communication unit 11 receives operator information on the operator U from the information terminal 4 via the network N, and inputs the received operator information to the operator information acquisition unit 131.
- the operator information is, for example, work information indicating the work content input by the operator U on the information terminal 4 and position information indicating the position of the operator U. Further, the communication unit 11 receives the robot information regarding the state of the robot 2 from the robot 2 via the network N, and inputs the received robot information to the robot information acquisition unit 132.
- the storage unit 12 includes a storage medium such as a ROM (Read Only Memory), a RAM (Random Access Memory), and a hard disk.
- the storage unit 12 stores a program executed by the control unit 13.
- the storage unit 12 stores various databases.
- the storage unit 12 stores, for example, a robot database 121, an operation device database 122, and a skill database 123.
- FIG. 3 is a diagram showing an example of the robot database 121.
- robot identification information for identifying the robot 2 hereinafter, referred to as a robot ID
- information indicating a place where the robot 2 is installed functions that can be executed by the robot 2
- reservation information indicating the status It is associated with reservation information indicating the status.
- the information indicating the location where the robot 2 is installed may be any information as long as it can specify the location, such as the name or address of a store or facility, or latitude / longitude information.
- the functions that can be executed by the robot 2 include, for example, a shopping function that enables the operator U to move the robot 2 to a store by remote control to make a purchase, and the operator U to move the robot 2 to a game center by remote control.
- This is a function corresponding to the work content, such as a game function that enables a player to play a game, or a luggage carrying function that enables the operator U to carry luggage by performing remote control.
- the functions that can be executed by the robot 2 are not limited to the functions corresponding to the work contents, but the functions corresponding to the operable contents such as a photographing function, a function of moving a finger, and a function of detecting temperature, pressure, vibration, and the like with a finger. It may be.
- the reservation information is information that associates the date and time with the identification information of the reserved operator U (hereinafter, referred to as an operator ID).
- an operator ID is information that associates the date and time with the identification information of the reserved operator U.
- the reservation information may include a plurality of operator IDs and the reservation date and time associated with each operator ID.
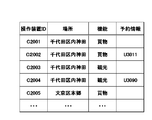
- FIG. 4 is a diagram showing an example of the operation device database 122.
- operating device identification information for identifying the operating device 3 hereinafter, referred to as an operating device ID
- information indicating a place where the operating device 3 is installed information indicating a place where the operating device 3 is installed
- Possible functions are associated with reservation information indicating the reservation status of the operation device 3.
- the information indicating the location where the operation device 3 is installed may be any information as long as it can identify the location, such as the name or address of a store or facility, or latitude / longitude information.
- the function that can be operated using the operation device 3 is a function of the robot 2 that can be operated by the operator U using the operation device 3, and is, for example, shopping, a game, and transport of luggage.
- the functions that can be operated using the operation device 3 are not limited to the functions of the robot 2, but include a function of displaying a captured image transmitted from the robot 2, a tactile sensation based on tactile information such as temperature, pressure, and vibration transmitted from the robot 2.
- the function provided to the operator U and the maximum speed at which the robot 2 can be moved may be used.
- the reservation information is information in which the date and time are associated with the reserved operator ID, similarly to the robot database 121 shown in FIG. In FIG. 4, only one operator ID is shown in the reservation information column, but the reservation information may include a plurality of operator IDs and the reservation date and time associated with each operator ID.
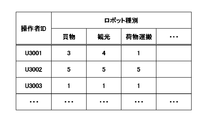
- FIG. 5 is a diagram showing an example of the skill database 123.
- the skill database 123 is an aspect of a skill storage unit that stores the operation skills of the operator U in association with the operator ID and the robot ID of the robot 2 that has experienced the operator U among the plurality of robots 2. is there.
- the user ID is associated with the skill of the operator U for each function executable using the robot 2 and the operation device 3. Since it is considered that there is a difference in the difficulty of operation for each combination of the robot 2 and the operation device 3, the skill may be associated with each combination of the robot 2 and the operation device 3 in the skill database 123.
- the control unit 13 has, for example, a CPU (Central Processing Unit).
- the control unit 13 functions as an operator information acquisition unit 131, a robot information acquisition unit 132, a selection unit 133, and a reservation processing unit 134 by executing a program stored in the storage unit 12.
- the operator information acquisition unit 131 is executed by using any one of the plurality of robots 2 via the communication unit 11 in association with an operator ID for identifying an operator U who operates the robot 2. Acquire work information indicating the contents of the work.
- the operator information acquisition unit 131 acquires, for example, work information indicating a place where the work is performed, as the content of the work.
- the operator information acquisition unit 131 may further acquire position information indicating the location of the operator U.
- the operator information acquisition unit 131 may acquire, as the state of the operator U, information indicating whether or not the operator U has logged in to use the robot 2.
- the robot information acquisition unit 132 acquires the robot information indicating the operation status of the robot 2 via the communication unit 11.
- the robot information acquisition unit 132 requests the robot 2 for robot information indicating whether the robot 2 is operating, for example, and acquires the robot information transmitted by the robot 2.
- the robot information acquisition unit 132 may acquire operation data transmitted to the robot 2 from the operation device 3 used to operate the robot 2 as robot information.
- the robot information acquisition unit 132 inputs the acquired robot information to the selection unit 133.
- the selection unit 133 selects the robot 2 to be used by the operator U from the plurality of robots 2 based on the work content indicated by the work information input from the operator information acquisition unit 131.
- the selection unit 133 selects the robot 2 having a function corresponding to the content of the work, for example, with reference to the robot database 121 illustrated in FIG.
- the selection unit 133 transmits information for specifying the selected robot 2 to the information terminal 4 as candidate robot information indicating candidate robots that can be used by the operator U, and from the plurality of candidate robots by the operation of the operator U.
- the selected robot 2 may be selected as the robot 2 used by the operator U.
- the selection unit 133 transmits, for example, candidate robot information indicating one or more candidate robots that can be used by the operator U from the plurality of robots 2 to the information terminal 4 used by the operator U, A candidate robot selected from one or more candidate robots received from is selected as a use robot.
- the selection unit 133 may select the robot 2 to be used further based on the location indicated by the work information.
- the selection unit 133 transmits, to the information terminal 4, candidate robot information indicating the robot 2 installed at the work location indicated by the work content input from the operator information acquisition unit 131, for example. Specifically, when the work content is a shopping at an ABC shopping mall, the selecting unit 133 selects the robots R0001 to R0006 whose locations are “ABC mall” in the robot database 121 shown in FIG.
- the selected robot 2 transmits candidate robot information including the robot ID of the selected robot 2 to the information terminal 4.
- the selection unit 133 may select a use operation device to be used by the operator U from a plurality of operation devices 3 that can be used for any operation of the plurality of robots 2 based on the content of the work.
- the selection unit 133 selects the operation device 3 having a function corresponding to the content of the work, for example, with reference to the operation device database 122 illustrated in FIG.
- the selection unit 133 transmits information for specifying the selected operation device 3 to the information terminal 4 as candidate use device information indicating candidate use devices that can be used by the operator U.
- the operating device 3 selected from the candidate operating devices may be selected as the operating device 3 used by the operator U.
- the selection unit 133 may select a combination of the used robot and the used operation device based on the content of the work.
- the selection unit 133 may use, for example, candidate robot information indicating one or more candidate robots that can be used by the operator U and candidate operating device information indicating one or more candidate operating devices. The information is transmitted to the terminal 4, and based on the information indicating the result selected by the operator U in the information terminal 4, the used robot and the used operating device are selected.
- the selection unit 133 refers to the robot database 121 shown in FIG. 3 and the operation device database 122 shown in FIG. 4 and selects the robot 2 and the operation device 3 having functions corresponding to the contents of the work. I do. If the model of the robot 2 that can be operated using the operation device 3 is specified in the operation device database 122, the selection unit 133 selects one or more candidate robots that can be used for the work content from the plurality of robots 2. After the selection and the selection of the candidate robot, the operation device 3 capable of operating the selected one or more candidate robots may be selected from the plurality of operation devices 3 as the operation device to be used.
- the selection unit 133 transmits information for specifying the selected robot 2 and the operation device 3 to the information terminal 4 as candidate model information indicating a combination of the robot 2 and the operation device 3 that can be used by the operator U. Is also good. In this case, the selection unit 133 determines the combination of the robot 2 and the operation device 3 selected from the combination of the plurality of robots 2 and the operation device 3 by the operation of the operator U and the robot 2 and the operation Select as device 3.
- FIG. 6 is a diagram illustrating an example of a reservation screen displayed on the information terminal 4 by the selection unit 133.
- FIG. 6A is a screen displayed for the first time after the operator U logs in and for selecting a work content. On the screen for selecting the work content, for example, the work content corresponding to the function column of the robot database is displayed.
- “shopping”, “game”, “sightseeing” for fun, and “luggage transportation”, “sightseeing guide”, and “manufacturing” for work are work contents. Included as
- FIG. 6B is a screen for selecting a place and date and time where the robot 2 and the operation device 3 are used.
- a method of designating a place one of a method of inputting an address and a method of inputting a facility name can be selected.
- FIG. 7 is a diagram showing an example of a screen for selecting the robot 2.
- FIG. 7A shows a candidate robot that is the robot 2 that can be used at the place and date and time selected by the operator U.
- the screen changes to FIG. 7B, and the detailed specifications of the robot A selected by the operator U are displayed.
- the selection unit 133 notifies the reservation processing unit 134 that the robot A has been selected.
- the selection unit 133 returns the screen to FIG.
- the selecting unit 133 determines whether the operator U operates the robot 2 based on the time difference between the place where the operator U plans to operate the robot 2 and the place where the robot 2 to be operated by the operator U operates.
- the robot 2 to be used may be selected. For example, it is assumed that the operator U is in Japan and the place where the robot 2 should perform work is a tie with a time difference of 2 hours from Japan.
- the selection unit 133 converts the operable time zone from 7:00 am to 3:00 pm in Thai time, and A robot 2 that can be used between 7:00 and 3:00 pm is selected.
- the selection unit 133 sets the The time from time to 6:00 pm is converted from noon to 8:00 pm Japan time. Then, the selection unit 133 selects the operation device 3 usable from noon to 8:00 pm Japan time. As described above, the selection unit 133 selects the robot 2 and the operation device 3 in consideration of the time difference, so that even when the operator U operates the robot 2 from a remote location, the selection unit 133 can be used. The appropriate robot 2 and operating device 3 can be appropriately selected.
- the reservation processing unit 134 executes a process of reserving a robot 2 that can be used by the operator U. Specifically, the reservation processing unit 134 causes the storage unit 12 to store, in association with the operator ID, the robot ID for identifying the used robot selected by the selection unit 133 and the reservation period in which the used robot can be used. Thereby, the robot 2 selected as the robot to be used is reserved.
- the reservation period includes the date and time at which it can be used and the time at which it can be used from that date and time.
- the reservation processing unit 134 associates, for example, the operator ID and the reservation period in the robot database 121 shown in FIG.
- the reservation processing unit 134 acquires from the operator U based on the time difference between the place where the operator U will operate the robot 2 and the place where the robot 2 to be operated by the operator U operates.
- the storage period may be stored in the storage unit 12 after correcting the desired reservation period. For example, assume that the operator U is in Japan, and the robot 2 reserved by the operator U is in Thailand with a time difference of 2 hours from Japan. In this case, when the operator U performs a reservation operation of using the robot 2 from 9:00 am to 5:00 pm Japan time, the reservation processing unit 134 performs the reservation operation based on the time of the place where the robot 2 is located.
- the reservation period is from 7:00 am to 3:00 pm. By doing so, it is possible to prevent the robot 2 from being reserved by the multiple operators U at the same date and time.
- the reservation processing unit 134 associates the operator ID, the robot ID, the operation device ID for identifying the used operation device selected by the selection unit 133, and the reservation period in which the used robot and the used operation device can be used. May be stored in the storage unit 12. In this case, the reservation processing unit 134 associates the operator ID with the reservation period in, for example, the robot database shown in FIG. 3 and the operating device database shown in FIG.
- the reservation processing unit 134 may transmit information for permitting the robot 2 to perform an operation based on the operation data transmitted from the operation device 3 to the robot 2 within a reservation period. For example, when the specific robot 2 is reserved together with the specific operation device 3, the reservation processing unit 134 transmits the reservation period and the operation device ID of the operation device 3 to the robot 2. When the reservation processing unit 134 operates in this way, the robot 2 operates based on the operation instruction received during the reservation period and including the notified operation device ID, and receives another operation instruction. Can be disabled. Therefore, the reservation device 1 can prevent a problem that another operator U operates the robot 2 while a certain operator U is using the robot 2.
- the reservation processing unit 134 may determine the usage fee for the reserved robot 2 and operating device 3. The reservation processing unit 134 determines the usage fee so that the usage fee increases as the number of reservations of the robot 2 and the operation device 3 increases. The reservation processing unit 134 may determine a reward amount for the operator U when performing an operation using the robot 2. The reservation processing unit 134 determines the reward amount such that the greater the number of robots 2 reserved for performing the same work as that performed by the operator U, the lower the reward amount.
- the selection unit 133 may select the robot to be used and the operation device to be used based on other various conditions, and may cause the reservation processing unit 134 to reserve the selected robot 2 and operation device 3.
- various selection methods will be described.
- the selection unit 133 may select the robot to be used by referring to the skill database 123 on condition that the operation skill of the operator U corresponding to the robot to be used is at or above the allowable level.
- the selection unit 133 specifies, for example, the type of the robot 2 used for performing the work indicated by the work content obtained by the operator information obtaining unit 131 from the information terminal 4, and assigns the type of the specified robot 2 to the skill database 123.
- the operation skill of the associated operator U is specified.
- the selection unit 133 selects, for example, the robot 2 whose operator U has an operation skill higher than or equal to a level at which there is no problem in safety when using the robot 2 as a candidate robot. By operating the selection unit 133 in this manner, it is possible to prevent a situation in which the operator U uses the robot 2 that may cause an accident when operated by the operator U.
- the selection unit 133 may select a robot to use from a plurality of robots 2 indicating that the robot information acquired by the robot information acquisition unit 132 from the robot 2 and indicating the operation status of the robot 2 is not operating. Good.
- the selection unit 133 includes details of the work performed using the robot 2, the skill of the operator U, history information indicating whether the operator U has completed the work as scheduled in the past, and the use of the robot 2. , The probability that the robot U will be in a usable state by the date and time at which the operator U wants to start use is calculated, and the specific robot 2 can be used based on the calculated probability. It may be determined whether or not.
- the selection unit 133 When the robot information acquisition unit 132 acquires operation data transmitted from the operation device 3 used to operate the robot 2 to the robot 2 as robot information, the selection unit 133 performs the operation based on the operation content indicated by the operation data. Thus, the time until the use period of the robot 2 ends may be predicted. For example, when a predetermined time has elapsed after the operation of returning the arm of the robot 2 to the initial state is performed, the selection unit 133 switches to a state where the robot 2 can be used after the time required for the use termination process of the robot 2 has elapsed. Predict that it will be.
- the selection unit 133 selects the robot 2 to be used by the operator U based on the operation state of the robot 2 in this manner, so that the robot 2 has been used for more than the reserved period and cannot be used. The problem of assigning the robot 2 to the operator U can be avoided.
- the operator information acquisition unit 131 further acquires the robot usage fee of each of the plurality of robots 2, the fee information indicating the device usage fee of each of the plurality of operation devices 3, and the budget information indicating the budget of the operator U. You may.
- the operator information acquisition unit 131 acquires, for example, the budget information input by the operator U in the information terminal 4, and inputs the acquired budget information to the selection unit 133. Further, the operator information acquisition unit 131 acquires the usage fee of the robot 2 and the usage fee of the operation device 3 stored in the storage unit 12 in advance.
- the operator information acquisition unit 131 may acquire a robot usage fee and a device usage fee from an external device.
- the selection unit 133 selects the robot to use and the operation device to use based on the budget indicated by the budget information acquired by the operator information acquisition unit 131, the robot usage fee, and the device usage fee. Specifically, the selection unit 133 presents the robot 2 and the operation device 3 within the budget indicated by the budget information to the operator U as a candidate robot and a candidate use device.
- the operator information acquisition unit 131 may further acquire the usage fee of each of the plurality of robots 2 and reward information indicating a reward amount that the operator U can obtain by the work.
- the operator information acquisition unit 131 acquires, for example, reward information input by the operator U in the information terminal 4, and inputs the acquired reward information to the selection unit 133.
- the selection unit 133 selects a robot to use based on the relationship between the usage fee of the robot 2 and the reward.
- the reservation processing unit 134 selects the robot 2 so that, for example, the reward amount is larger than the usage fee of the robot 2.
- the reservation processing unit 134 may select the robot 2 so that the reward amount is larger than the usage fee of the robot 2 and the operation device 3.
- the operator information acquisition unit 131 estimates a reward amount obtained by the operator U using the robot 2 and the operation device 3 based on the work content acquired from the information terminal 4 and the skill of the operator U, and estimates the reward amount. Reward information indicating the reward amount obtained may be input to the selection unit 133.
- the selection unit 133 stores the location of the operator U indicated by the position information input from the operator information acquisition unit 131 and the operation device database 122.
- the operating device to be used may be selected further based on the installation location of the operating device 3.
- the selecting unit 133 refers to, for example, the operating device database 122 illustrated in FIG. 4, and the installation location of the operating device 3 indicated in the location column in the operating device database 122 is a predetermined distance from the location of the operator U.
- the operation device 3 is selected.
- the predetermined distance can be set by the operator U using the information terminal 4, and is, for example, a distance at which the operator U can arrive within 30 minutes.
- the selection unit 133 may change the predetermined distance based on the number of the operation devices 3 within the predetermined distance. For example, when there is no operation device 3 within a predetermined distance, the selection unit 133 increases the predetermined distance until at least one operation device 3 suitable for the work content can be selected.
- the selection unit 133 may transmit the information for identifying the selected plurality of candidate use devices to the information terminal 4 by arranging the information in the order of smaller predetermined distances.
- the selection unit 133 may select a robot to use based on the frequency of use of the plurality of robots 2.
- the selection unit 133 refers to, for example, the past usage history of the robot 2 and gives priority to the robot 2 with a low usage frequency so that the usage frequency of each of the plurality of robots 2 available to the operator U approaches an equal state. To choose.
- the selection unit 133 selects another robot 2 from the plurality of robots 2 that can be used for the operation based on the content of the operation. select.
- the reservation processing unit 134 stores the reservation period stored in the storage unit 12 in association with the failed robot 2 in the storage unit 12 in association with the robot ID of another robot 2 selected by the selection unit 133. Reserve another robot 2.
- the reservation processing unit 134 may notify the operator U of information indicating the date and time when the other robot 2 can be used. .
- the reservation processing unit 134 transmits the information indicating the date and time at which the other robot 2 can be used to the operating device 3 or the information terminal 4 used by the operator U, for example. Notify U.
- FIG. 8 is a diagram showing an operation sequence of the reservation device 1 and the information terminal 4 in the reservation system S.
- the sequence diagram illustrated in FIG. 8 starts when the operator U accesses the reservation site for reserving the robot 2 and the operation device 3 on the information terminal 4.
- a screen for inputting a login ID is displayed.
- the information terminal 4 transmits the login ID and the password to the reservation device 1.
- the selection unit 133 of the reservation device 1 sets the reservation screen so that the information terminal 4 displays a screen for inputting the work content. Is transmitted to the information terminal 4.
- the information terminal 4 When the information terminal 4 receives the reservation screen data, the information terminal 4 displays, for example, the reservation screen shown in FIG. 6A (S42). When the operator U selects a work content on the reservation screen (S43), the information terminal 4 transmits work information indicating the selected work content to the reservation device 1.
- the selection unit 133 of the reservation device 1 selects one or more robots 2 usable by the operator U as candidate robots based on the work content indicated by the received work content (S11). In addition, the selection unit 133 selects one or more operation devices 3 that can be used by the operator U as candidate operation devices (S12). The selection unit 133 transmits candidate information indicating the selected candidate robot and the candidate operation device to the information terminal 4.
- the information terminal 4 When the information terminal 4 receives the candidate information, the information terminal 4 displays a screen showing one or more candidate robots and candidate operation devices as shown in FIG. 7 (S44). When the operator U selects a desired candidate robot and a candidate operating device from the one or more candidate robots and the candidate operating devices (YES in S45), the information terminal 4 outputs selection information indicating the selected candidate robot and the candidate operating device. It is transmitted to the reservation device 1.
- the reservation processing unit 134 associates the robot ID and the operation device ID corresponding to the candidate robot and the candidate operation device indicated by the selection information with the operator ID of the information terminal 4 and stores them in the storage unit 12.
- the reservation process is executed by storing the information (S13). According to the above sequence, the operator U can reserve the robot 2 and the operation device 3 necessary for the work by inputting the work content on the information terminal 4.
- the selection unit 133 selects the robot 2 and the operation device 3 to be used by the operator U from the plurality of robots 2 and the plurality of operation devices 3 based on the work content input by U.
- the case where the operator U has not determined the work content may be assumed.
- the operator U may be looking for a job that can be performed using the robot 2 and the operation device 3. Therefore, the reservation device 1 may present the operator U with a task that the operator U can perform using the robot 2 and the operation device 3.
- FIG. 9 is a diagram showing a configuration of the reservation device 1 according to the present modification.
- the reservation device 1 illustrated in FIG. 9 is different from the reservation device 1 illustrated in FIG. 2 in that the reservation device 1 further includes an information providing unit 135, and is the same in other points.
- the information providing unit 135 provides recruiting information indicating a plurality of works for which workers are being recruited.
- the information providing unit 135 provides the job information to the operator U by acquiring the job information from an external server that provides the job information, for example, and transmitting the acquired job information to the information terminal 4.
- the information providing unit 135 provides the operator U with job information corresponding to an operation that can be performed using the robot 2 among a plurality of pieces of job information acquired from an external server, for example.
- the recruitment information includes information on the contents of the work, the period during which the work is to be performed, and the amount of the remuneration.
- the operator U checks the information indicated by the recruiting information, and if there is recruiting information corresponding to the work to be performed, selects the recruiting information.
- the information providing unit 135 causes the information terminal 4 to display, for example, the work content, the work date and time, and the type of the robot 2 that needs to be used for the work in association with each of the plurality of pieces of job information.
- the information providing unit 135 may further cause the information terminal 4 to display the type of the operation device 3 that needs to be used for performing a task.
- the operator U can select a work that he can cope with by checking the work content and the robot 2 that needs to be used.
- the operator information obtaining unit 131 obtains, as work information, information including the content of the work selected by the operator U from the plurality of works indicated by the job offer information provided by the information providing unit 135, and uses the obtained work information as the selecting unit 133. Notify.
- the selection unit 133 selects the robot 2 to be used by the operator U based on the work content indicated by the obtained work information. By operating the reservation device 1 in this way, even when the operator U has not decided on the work to be performed, the operator U can work using the appropriate robot 2.
- the information providing unit 135 notifies the selection unit 133 of the work content indicated by the recruitment information, acquires information for specifying the usable robot 2 and the operation device 3 from the selection unit 133, and recruits the acquired information to the recruitment.
- the information may be provided to the operator U together with the information.
- the selection unit 133 refers to the robot database and the operation device database, and among the plurality of robots 2 and the operation devices 3 that can be used for performing the work content indicated by the job information, a reservation is made during the period indicated by the job information.
- the robot 2 and the operating device 3 that have not been selected are selected, and the selected result is notified to the information providing unit 135.
- idle time may occur during the work.
- the transport operation may not be performed between the time when the load is transported and the time when the next load arrives. In such a case, it is desirable that the operator U can perform another operation using another robot 2 between operations.
- the information providing unit 135 obtains information about the time zone in which the work occurs from the server or the information terminal 4 of the company that is recruiting for the work selected by the operator U, Based on the idle time, other job information that allows the operator U to work may be provided to the information terminal 4.
- the selection unit 133 may use the other work during a time period between a plurality of works performed by the first robot 2a.
- a second robot 2b that can be selected is selected.
- the reservation processing unit 134 associates the respective robot IDs of the first robot 2a and the second robot 2b with the respective reservation periods and stores them in the storage unit 12, thereby storing the first robot 2a and the second robot 2a.
- the robot 2b is reserved.
- the operator performs the transport operation using the first robot 2a at the place A from 10 am to 10:30 am, and performs the second work at the place B from 10:30 am to 11 am
- the shop is cleaned using the robot 2b, and the transport operation is performed using the first robot 2a at the place B from 11:00 to noon.
- the operator U can take advantage of the characteristics of the remote operation to save time. Can be used effectively.
- the company that has recruited wants to grasp the operating skill of the robot U of the operator U and the profile such as the history of the same work. Therefore, when the operator information obtaining unit 131 obtains, from the operator U, the operation information desired by the operator U, the selection unit 133 selects the robot 2 corresponding to the content of the operation indicated by the operation information, and makes a reservation.
- the processing unit 134 may reserve the robot 2 selected by the selection unit 133 and notify the provider of the job offer information of the profile of the operator U.
- the operator information acquisition unit 131 executes the operation using one of the plurality of robots 2 in association with the operator ID of the operator U who operates the robot 2. Acquire work information indicating the contents of the work. Then, the selection unit 133 selects a robot to be used by the operator U from the plurality of robots 2 based on the content of the work indicated by the work information.
- the reservation processing unit 134 causes the storage unit 12 to store the robot ID of the used robot selected by the selection unit 133 and the reservation period in which the used robot can be used in association with the operator ID. Since the reservation device 1 has such a configuration, a person who wants to perform an operation using the robot 2 can easily select a robot suitable for the operation from a large number of robots and make a reservation.
- the present invention has been described using the embodiment, but the technical scope of the present invention is not limited to the scope described in the above embodiment, and various modifications and changes are possible within the scope of the gist. is there.
- the specific embodiment of the dispersion / integration of the apparatus is not limited to the above-described embodiment, and all or a part of the apparatus may be functionally or physically dispersed / integrated in an arbitrary unit. Can be.
- new embodiments that are generated by arbitrary combinations of the plurality of embodiments are also included in the embodiments of the present invention. The effect of the new embodiment caused by the combination has the effect of the original embodiment.
Landscapes
- Business, Economics & Management (AREA)
- Human Resources & Organizations (AREA)
- Engineering & Computer Science (AREA)
- Economics (AREA)
- Strategic Management (AREA)
- Entrepreneurship & Innovation (AREA)
- Tourism & Hospitality (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Marketing (AREA)
- General Physics & Mathematics (AREA)
- General Business, Economics & Management (AREA)
- Development Economics (AREA)
- Quality & Reliability (AREA)
- Operations Research (AREA)
- Game Theory and Decision Science (AREA)
- Educational Administration (AREA)
- Accounting & Taxation (AREA)
- Finance (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Primary Health Care (AREA)
- Manipulator (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP19862571.7A EP3855372A4 (en) | 2018-09-18 | 2019-09-04 | RESERVATION DEVICE, RESERVATION PROCEDURE AND RESERVATION SYSTEM |
| CN201980061005.6A CN112703516A (zh) | 2018-09-18 | 2019-09-04 | 预约装置、预约方法以及预约系统 |
| US17/204,024 US20210201233A1 (en) | 2018-09-18 | 2021-03-17 | Reservation apparatus, reservation method, and reservation system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018173182A JP2020046791A (ja) | 2018-09-18 | 2018-09-18 | 予約装置、予約方法及び予約システム |
| JP2018-173182 | 2018-09-18 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/204,024 Continuation US20210201233A1 (en) | 2018-09-18 | 2021-03-17 | Reservation apparatus, reservation method, and reservation system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020059493A1 true WO2020059493A1 (ja) | 2020-03-26 |
Family
ID=69887301
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/034797 Ceased WO2020059493A1 (ja) | 2018-09-18 | 2019-09-04 | 予約装置、予約方法及び予約システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20210201233A1 (https=) |
| EP (1) | EP3855372A4 (https=) |
| JP (1) | JP2020046791A (https=) |
| CN (1) | CN112703516A (https=) |
| WO (1) | WO2020059493A1 (https=) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023053447A1 (ja) | 2021-10-01 | 2023-04-06 | avatarin株式会社 | 情報処理装置、情報処理方法及びプログラム |
| JP7380764B1 (ja) | 2022-07-01 | 2023-11-15 | フジテック株式会社 | 情報処理システムおよび情報処理方法 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7504374B2 (ja) * | 2020-06-19 | 2024-06-24 | Telexistence株式会社 | ロボット制御装置、ロボット制御方法及びロボット制御システム |
| JP2022035538A (ja) * | 2020-08-21 | 2022-03-04 | avatarin株式会社 | 情報処理装置、情報処理方法、及びプログラム |
| JP7525343B2 (ja) * | 2020-09-11 | 2024-07-30 | avatarin株式会社 | 決済システム及び決済方法 |
| JP7525344B2 (ja) * | 2020-09-14 | 2024-07-30 | avatarin株式会社 | 情報処理装置、情報処理方法及びプログラム |
| JP7642450B2 (ja) * | 2021-06-11 | 2025-03-10 | 本田技研工業株式会社 | 選択支援装置、選択支援方法、及びプログラム |
| JP7564062B2 (ja) * | 2021-06-29 | 2024-10-08 | ダイコク電機株式会社 | 遊技場用システム |
| CN120386336A (zh) * | 2024-01-29 | 2025-07-29 | 北京有竹居网络技术有限公司 | 机器人调度方法、装置、电子设备及存储介质 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002133090A (ja) * | 2000-10-20 | 2002-05-10 | Casio Comput Co Ltd | 留守管理システムおよび留守管理装置並びにそれらのプログラム記録媒体 |
| JP2004029908A (ja) * | 2002-06-21 | 2004-01-29 | Casio Comput Co Ltd | サポートシステムおよびプログラム |
| JP2005064837A (ja) | 2003-08-12 | 2005-03-10 | Oki Electric Ind Co Ltd | ロボットによる中継システム、ロボットによる中継プログラム及びその方法 |
| JP2005186220A (ja) * | 2003-12-25 | 2005-07-14 | Casio Comput Co Ltd | サービス提供システム、ロボット支援装置、ロボット装置、ロボット管理装置、および、プログラム |
| JP2018116659A (ja) * | 2017-01-20 | 2018-07-26 | ヤフー株式会社 | 提供装置、提供方法および提供プログラム |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6016385A (en) * | 1997-08-11 | 2000-01-18 | Fanu America Corp | Real time remotely controlled robot |
| JP2002101333A (ja) * | 2000-09-26 | 2002-04-05 | Casio Comput Co Ltd | 遠隔制御装置および遠隔操作サービスシステム並びにそれらのプログラム記録媒体 |
| JP4142912B2 (ja) * | 2002-07-19 | 2008-09-03 | 富士通株式会社 | トランザクション振り分けプログラム |
| JP2004070624A (ja) * | 2002-08-06 | 2004-03-04 | Oki Electric Ind Co Ltd | 遠隔操縦型鑑賞システム |
| JP4377744B2 (ja) * | 2004-05-13 | 2009-12-02 | 本田技研工業株式会社 | ロボット制御装置 |
| JP4639343B2 (ja) * | 2006-01-20 | 2011-02-23 | 株式会社国際電気通信基礎技術研究所 | ロボット遠隔操作システム |
| TWI581196B (zh) * | 2010-05-31 | 2017-05-01 | Rakuten Inc | An appointment processing device, an appointment processing method, an appointment processing program product, and a computer-readable recording medium having a reservation processing program |
| US8532820B1 (en) * | 2012-09-19 | 2013-09-10 | Google Inc. | Cloud service to manage robotic devices |
| CN103901856A (zh) * | 2014-03-23 | 2014-07-02 | 余浪 | 用于远程控制机器人的方法以及机器人化身网络 |
| US9630318B2 (en) * | 2014-10-02 | 2017-04-25 | Brain Corporation | Feature detection apparatus and methods for training of robotic navigation |
| JP2016090655A (ja) * | 2014-10-30 | 2016-05-23 | シャープ株式会社 | 音声認識ロボットシステム、音声認識ロボット、音声認識ロボットの制御装置、音声認識ロボットを制御するための通信端末、およびプログラム |
-
2018
- 2018-09-18 JP JP2018173182A patent/JP2020046791A/ja active Pending
-
2019
- 2019-09-04 EP EP19862571.7A patent/EP3855372A4/en active Pending
- 2019-09-04 CN CN201980061005.6A patent/CN112703516A/zh active Pending
- 2019-09-04 WO PCT/JP2019/034797 patent/WO2020059493A1/ja not_active Ceased
-
2021
- 2021-03-17 US US17/204,024 patent/US20210201233A1/en not_active Abandoned
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002133090A (ja) * | 2000-10-20 | 2002-05-10 | Casio Comput Co Ltd | 留守管理システムおよび留守管理装置並びにそれらのプログラム記録媒体 |
| JP2004029908A (ja) * | 2002-06-21 | 2004-01-29 | Casio Comput Co Ltd | サポートシステムおよびプログラム |
| JP2005064837A (ja) | 2003-08-12 | 2005-03-10 | Oki Electric Ind Co Ltd | ロボットによる中継システム、ロボットによる中継プログラム及びその方法 |
| JP2005186220A (ja) * | 2003-12-25 | 2005-07-14 | Casio Comput Co Ltd | サービス提供システム、ロボット支援装置、ロボット装置、ロボット管理装置、および、プログラム |
| JP2018116659A (ja) * | 2017-01-20 | 2018-07-26 | ヤフー株式会社 | 提供装置、提供方法および提供プログラム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3855372A4 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023053447A1 (ja) | 2021-10-01 | 2023-04-06 | avatarin株式会社 | 情報処理装置、情報処理方法及びプログラム |
| JP7380764B1 (ja) | 2022-07-01 | 2023-11-15 | フジテック株式会社 | 情報処理システムおよび情報処理方法 |
| JP2024006454A (ja) * | 2022-07-01 | 2024-01-17 | フジテック株式会社 | 情報処理システムおよび情報処理方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20210201233A1 (en) | 2021-07-01 |
| EP3855372A4 (en) | 2022-06-08 |
| EP3855372A1 (en) | 2021-07-28 |
| CN112703516A (zh) | 2021-04-23 |
| JP2020046791A (ja) | 2020-03-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2020059493A1 (ja) | 予約装置、予約方法及び予約システム | |
| US11961017B2 (en) | Roomfinder platform | |
| JP6784853B2 (ja) | デバイス間ハンドオフ | |
| US20140278616A1 (en) | Multi-modal fare calculation method, system and apparatus | |
| US11151577B2 (en) | Dynamically selecting contact center workflows based on workflow insights | |
| JP2019530034A (ja) | ロボットフリート派遣要求システム | |
| KR102139119B1 (ko) | 내비게이션 방법, 장치, 저장 매체 및 기기 | |
| CN112116112B (zh) | 信息交互方法、装置、存储介质和电子设备 | |
| EP3622458A1 (en) | Self-learning adaptive routing system | |
| WO2017014952A1 (en) | Multi-dimensional approach to agent assignment | |
| JP2021117690A5 (https=) | ||
| KR20180129374A (ko) | 메신저를 이용한 근태 관리 방법 및 시스템 | |
| JP6910514B2 (ja) | 車両の配車を管理するためのシステム、方法、及びプログラム | |
| JP2019021139A (ja) | 順番待ちシステム、順番待ち管理装置、順番待ち行列の制御方法、及びプログラム | |
| JP2017174237A (ja) | スケジュール案内装置、スケジュール案内方法、およびスケジュール案内プログラム | |
| KR102713473B1 (ko) | 정보를 제공하는 전자 장치의 동작 방법 및 이를 지원하는 전자 장치 | |
| JP6365007B2 (ja) | 情報処理装置、情報処理方法、及びプログラム | |
| JP2019082905A (ja) | 情報処理装置、情報処理方法及びプログラム | |
| JP6442587B1 (ja) | 情報管理システム、情報管理方法及びプログラム | |
| KR102129272B1 (ko) | 반려동물 응급상황 대응 시스템 및 방법 | |
| US9729718B2 (en) | Dynamic agent workflow based on contact center load | |
| JP3355303B2 (ja) | 保守巡回作業表作成装置 | |
| US20240221095A1 (en) | Intent-based item recommendations | |
| JP7042715B2 (ja) | ヘッドマウント装置、サーバ装置および作業支援システム | |
| JP5928021B2 (ja) | スケジュール管理システム、スケジュール管理方法、およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19862571 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2019862571 Country of ref document: EP Effective date: 20210419 |