WO2020021702A1 - ステータ、電動機、圧縮機および空気調和装置 - Google Patents
ステータ、電動機、圧縮機および空気調和装置 Download PDFInfo
- Publication number
- WO2020021702A1 WO2020021702A1 PCT/JP2018/028231 JP2018028231W WO2020021702A1 WO 2020021702 A1 WO2020021702 A1 WO 2020021702A1 JP 2018028231 W JP2018028231 W JP 2018028231W WO 2020021702 A1 WO2020021702 A1 WO 2020021702A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- core
- insulator
- stator
- teeth
- hole
- Prior art date
Links
Images






























Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/16—Stator cores with slots for windings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/32—Windings characterised by the shape, form or construction of the insulation
- H02K3/34—Windings characterised by the shape, form or construction of the insulation between conductors or between conductor and core, e.g. slot insulation
Definitions
- the present invention relates to a stator, an electric motor, a compressor, and an air conditioner.
- the stator of the electric motor includes a stator core having a plurality of teeth around which coils are wound. A slot for accommodating the coil is formed between adjacent teeth. Each tooth is provided with an insulator for insulating the coil and the tooth (for example, Patent Document 1).
- the present invention has been made to solve the above-described problems, and has as its object to suppress the displacement of teeth.
- a stator according to the present invention includes a stator core having a yoke extending in a circumferential direction about a central axis, teeth extending from the yoke toward the central axis, and slots circumferentially adjacent to the teeth. And a coil wound in the slot.
- the stator core has a first core portion located at an axial end of a central axis and a second core portion located at a central portion in the axial direction, and the area of the slot in the first core portion is the second core portion. Larger than the area of the slot in the part.
- the first core portion is provided with an insulator located between the teeth and the coil.
- the stator core has a hole penetrating the first core part and reaching the second core part.
- the insulator has a projection inserted into the hole up to the position of the second core.
- the second core is firmly fixed to the first core to prevent the teeth from shifting. Can be suppressed.
- FIG. 2 is a cross-sectional view illustrating the electric motor according to the first embodiment.
- FIG. 3 is a cross-sectional view illustrating a second core unit according to the first embodiment.
- FIG. 4 is an enlarged cross-sectional view illustrating a part of a second core unit according to the first embodiment.
- FIG. 3 is a cross-sectional view illustrating a first core unit according to the first embodiment.
- FIG. 3 is an enlarged cross-sectional view illustrating a part of a first core unit according to the first embodiment.
- 3A is a perspective view showing a stator core of the first embodiment
- FIG. 3B is a perspective view showing a state where an insulator is attached to the stator core
- FIG. 3C is a perspective view showing a state where an insulator and an insulating film are attached to the stator core.
- FIG. 3 is a diagram illustrating a cross-sectional structure (A) of the teeth, the insulator, and the insulating film according to the first embodiment in comparison with a cross-sectional structure (B) of a comparative example.
- FIG. 2 is a longitudinal sectional view showing the electric motor according to the first embodiment. Sectional views (A) and (B) showing a first core portion and a second core portion of the stator of the first embodiment, a sectional view (C) along line 9C-9C shown in FIG. 9 (A), and It is sectional drawing (D) in line segment 9D-9D.
- FIG. 5A and 5B are diagrams for explaining the operation of a first core portion and a second core portion according to the first embodiment
- FIGS. FIGS. 3A to 3F are diagrams illustrating configuration examples of a hole and a step according to the first embodiment
- FIGS. FIG. 3 is a cross-sectional view illustrating a hole and a protrusion according to the first embodiment.
- FIG. 4 is a cross-sectional view illustrating another configuration example of the hole and the protrusion according to the first embodiment.
- FIG. 5A and 5B are diagrams for explaining the operation of a first core portion and a second core portion according to the first embodiment
- FIGS. FIGS. 3A to 3F are diagrams illustrating configuration examples of a hole and a step according to the first embodiment
- FIGS. FIG. 3 is a cross-sectional view illustrating a hole and a protrusion according to the first embodiment.
- FIG. 4 is a cross-sectional view illustrating another configuration example of the hole and the protrusion
- FIG. 3 is a diagram illustrating an arrangement of a caulking portion according to the first embodiment.
- FIG. 4 is a diagram showing another example of the arrangement of the swaging portion according to the first embodiment.
- FIG. 3 is a cross-sectional view showing a state where the stator according to the first embodiment is attached to a closed container.
- FIG. 4 is a diagram illustrating a fitted state between the first core portion and the second core portion of the first embodiment and a closed container.
- Sectional views (A) and (B) showing a first core portion and a second core portion of the stator according to the second embodiment, a sectional view (C) along line 19C-19C shown in FIG. 19 (A), and It is sectional drawing (D) in line segment 19D-19D.
- FIGS. 7A to 7F are diagrams illustrating configuration examples of a hole and a step according to the second embodiment;
- FIGS. It is a figure showing arrangement of a crimping part of a 2nd embodiment.
- FIG. 14 is a diagram illustrating another example of the arrangement of the swaging portion according to the second embodiment. It is a figure which shows the fitting state of the 1st core part and 2nd core part of Embodiment 2, and an airtight container.
- FIG. 13 is a diagram illustrating an insulator composite and a split core according to a third embodiment.
- FIG. 13 is a diagram illustrating an example in which the insulator composite according to the third embodiment is attached to an integral stator core.
- FIG. 14 is a diagram illustrating an insulator and a split core according to a modification of the third embodiment.
- FIG. 13 is a diagram illustrating an example in which an insulator according to a modification of the third embodiment is attached to an integral stator core.
- FIG. 14 is a diagram illustrating an insulator composite and a stator core according to a fourth embodiment.
- FIG. 14 is a diagram illustrating an insulator composite and a stator core according to a modification of the fourth embodiment. It is a figure (A), (B) which shows the insulator composite body and stator core of Embodiment 5. It is a figure (A), (B), and (C) which show the assembly method of the insulator composite body and stator core of Embodiment 5.
- FIG. 1 It is a figure (A), (B), and (C) which show other examples of a structure of an insulator composite body and a stator core of Embodiment 5. It is a figure (A) which shows the insulator complex and stator core of the modification of Embodiment 5, (B). It is a sectional view showing the rotary compressor to which the electric motor of each embodiment can be applied. It is a figure which shows the air conditioner provided with the rotary compressor of FIG.
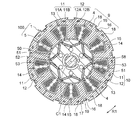
- FIG. 1 is a sectional view showing an electric motor 100 according to Embodiment 1 of the present invention.
- the electric motor 100 is an embedded permanent magnet electric motor in which the permanent magnet 53 is embedded in the rotor 5, and is used, for example, in the rotary compressor 300 (FIG. 34).
- the electric motor 100 is an electric motor called an inner rotor type, and has a stator 1 and a rotor 5 rotatably provided inside the stator 1.
- An air gap of, for example, 0.3 to 1.0 mm is formed between the stator 1 and the rotor 5.
- FIG. 1 is a cross-sectional view in a plane orthogonal to the central axis C1.
- the rotor 5 has a cylindrical rotor core 50, a permanent magnet 53 attached to the rotor core 50, and a shaft 58 fixed to the center of the rotor core 50.
- the shaft 58 is, for example, a shaft of the compressor 300 (FIG. 34).
- the rotor core 50 is formed by laminating laminated steel sheets in the axial direction and integrating them at a caulking portion or the like.
- the laminated steel sheet is, for example, an electromagnetic steel sheet, and has a thickness of, for example, 0.1 to 0.7 mm (for example, 0.35 mm).
- a plurality of magnet insertion holes 51 into which the permanent magnets 53 are inserted are formed along the outer peripheral surface of the rotor core 50.
- the magnet insertion hole 51 is a through hole that passes through the rotor core 50 in the axial direction.
- Each magnet insertion hole 51 corresponds to one magnetic pole.
- the number of the magnet insertion holes 51 is 6, and thus the number of magnetic poles is 6.
- the number of magnet insertion holes 51 is not limited to six, and may be two or more.
- the magnet insertion hole 51 is formed in a V-shape such that the center in the circumferential direction projects most toward the center axis C1.
- two permanent magnets 53 are arranged on both sides of the center in the circumferential direction.
- the two permanent magnets 53 arranged in the same magnet insertion hole 51 are magnetized such that the same poles face outward in the radial direction.
- the permanent magnet 53 is a plate-shaped member that is long in the axial direction, has a width in the circumferential direction of the rotor core 50, and has a thickness in the radial direction.
- the thickness of the permanent magnet 53 is, for example, 2 mm.
- the permanent magnet 53 is made of, for example, a rare earth magnet mainly containing neodymium (Nd), iron (Fe) and boron (B).
- the permanent magnet 53 is magnetized in the thickness direction.
- the rare earth magnet has a property that the coercive force decreases as the temperature increases, and the rate of decrease is -0.5 to -0.6% / K.
- a coercive force of 1100 to 1500 A / m is required to prevent demagnetization of the rare earth magnet when a maximum load assumed in the compressor is generated.
- the coercive force at room temperature (20 ° C.) needs to be 1800 to 2300 A / m.
- Dy dysprosium
- the coercive force at room temperature of the rare-earth magnet is 1800 A / m when Dy is not added, and becomes 2300 A / m by adding 2% by weight of Dy.
- the addition of Dy causes an increase in manufacturing cost and a decrease in residual magnetic flux density. Therefore, it is desirable to minimize the amount of Dy added or not to add Dy.
- each magnet insertion hole 51 two permanent magnets 53 are arranged in each magnet insertion hole 51, but one permanent magnet 53 may be arranged in each magnet insertion hole 51.
- the magnet insertion hole 51 is formed not in the above-described V-shape but in a linear shape.
- Flux barriers (leakage flux suppressing holes) 52 are formed at both ends in the circumferential direction of the magnet insertion hole 51.
- the flux barrier 52 suppresses leakage magnetic flux between adjacent magnetic poles.
- the core portion between the flux barrier 52 and the outer periphery of the rotor core 50 is a thin portion to suppress a short circuit of magnetic flux between adjacent magnetic poles.
- the thickness of the thin portion is desirably the same as the thickness of the laminated steel plate of the rotor core 50.
- Stator 1 has stator core 10 and coil 4 wound on stator core 10.
- the stator core 10 is formed by laminating laminated steel sheets in the axial direction and integrating them by a caulking portion 18.
- the laminated steel sheet is, for example, an electromagnetic steel sheet, and has a thickness of, for example, 0.1 to 0.7 mm (for example, 0.35 mm).
- the stator core 10 has an annular yoke 11 centered on the central axis C1 and a plurality of teeth 12 extending radially inward from the yoke 11 (that is, in a direction toward the central axis C1).
- the teeth 12 have, at radially inner ends, tooth tips 13 facing the outer peripheral surface of the rotor 5.
- nine teeth 12 are arranged at regular intervals in the circumferential direction, but the number of teeth 12 may be two or more. Between the teeth 12 that are adjacent in the circumferential direction, a slot 14 that is a space for accommodating the coil 4 is formed.
- the stator core 10 has a configuration in which a plurality of (here, nine) split cores 9 are connected in the circumferential direction for each tooth 12. These split cores 9 are connected to each other at a split surface 15 formed on the yoke 11.
- the division surface portion 15 is formed, for example, at an intermediate position between the teeth 12 that are adjacent in the circumferential direction.
- the split cores 9 are joined to each other by welding of the split surface portions 15 or fitting of uneven shapes (not shown).
- the coil 4 is formed by winding a magnet wire around the teeth 12 via the insulator 2 and the insulating film 3 (FIG. 6C), for example.
- the wire diameter of the coil 4 is, for example, 1.0 mm.
- the coil 4 is wound around each tooth 12 by concentrated winding, for example, 80 turns.
- the wire diameter and the number of turns of the coil 4 are determined according to the required number of revolutions, torque, applied voltage, or the area of the slot 14.
- the stator core 10 has a first core 10A located at both ends in the axial direction and a second core 10B located at the center in the axial direction.
- the first core portion 10A is not limited to the both ends in the axial direction of the stator core 10, but may be provided at at least one end in the axial direction.
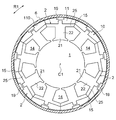
- FIG. 2 is a plan view showing the second core portion 10B of the stator core 10 (that is, the core portion at the central portion in the axial direction).
- the second core portion 10B has an annular second yoke portion 11B and a plurality of second teeth portions 12B extending radially inward from the second yoke portion 11B.
- the 2nd teeth part 12B has the 2nd tooth tip part 13B wider than the other part of the 2nd teeth part 12B in the end part in the diameter direction inside.
- the second core portion 10B has a configuration in which a plurality of split cores 9B each including one second tooth portion 12B are connected by the split surface portion 15 described above.
- FIG. 3 is a diagram showing one split core 9B of the second core unit 10B.
- the second yoke portion 11B has a radially outer peripheral surface 110 and a radially inner peripheral surface 111B.
- the second teeth portion 12B has side surfaces 121B on both sides in the circumferential direction.
- the second tooth tip 13B has a distal end surface 130 facing the rotor 5 and a radially outer peripheral surface 131B.
- a concave portion 19 is formed on the outer peripheral surface 110 of the second yoke portion 11B.
- the concave portion 19 is a portion where a jig for holding the stator core 10 is engaged when the coil 4 is wound, and a portion that becomes a refrigerant flow path when the electric motor 100 is attached to the compressor.
- the concave portion 19 is arranged, for example, on a straight line in the radial direction passing through the center in the width direction of the second tooth portion 12B.
- a hole 16 into which the protrusion 26 (FIG. 8) of the insulator 2 is press-fitted is formed in the second yoke 11B.
- the hole 16 desirably penetrates the second core 10B in the axial direction. However, even if the hole 16 does not penetrate the second core portion 10B in the axial direction, the hole portion 16 may extend in the axial direction from the axial end of the second core portion 10B.
- the cross-sectional shape of the hole 16 is semicircular, and the straight portion faces radially outward. Therefore, the hole 16 having a relatively large cross-sectional area can be formed near the outer periphery of the second yoke 11B. That is, the hole 16 can be arranged so as to block the flow of the magnetic flux as much as possible.
- the cross-sectional shape of the hole 16 is not limited to a semicircle.
- the second yoke portion 11B is formed with a caulking portion 18 for fixing the laminated steel plates to each other.
- Two caulking portions 18 are formed on both circumferential sides of the hole portion 16.
- the caulking section 18 is V-caulking here, but may be a round caulking, for example.
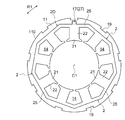
- FIG. 4 is a plan view showing the first core portion 10A of the stator core 10 (that is, the core portion at the axial end).
- the first core portion 10A has an annular first yoke portion 11A and a plurality of first teeth portions 12A extending radially inward from the first yoke portion 11A.
- the first tooth portion 12A has a first tooth tip portion 13A that is wider than other portions of the first tooth portion 12A at a radially inner end thereof.
- the first core portion 10A has a configuration in which a plurality of split cores 9A each including one first tooth portion 12A are connected by the above-described split surface portion 15.
- FIG. 5 is a view showing one split core 9A of the first core unit 10A.
- FIG. 5 further shows the outline of the split core 9B (FIG. 3) of the second core portion 10B by a broken line.
- the first yoke portion 11A has a radially outer peripheral surface 110 and a radially inner peripheral surface 111A.
- the first teeth portion 12A has side surfaces 121A on both sides in the circumferential direction.
- the first tooth tip 13A has a distal end surface 130 facing the rotor 5 and a radially outer peripheral surface 131A.
- the inner peripheral surface 111A of the first yoke portion 11A, the side surface 121A of the first teeth portion 12A, and the outer peripheral surface 131A of the first tooth tip portion 13A all face the slot 14.
- the first yoke 11A and the second yoke 11B form the yoke 11 (FIG. 1).
- the teeth 12 (FIG. 1) are formed by the first teeth 12A and the second teeth 12B (FIG. 2).
- the first tooth tip 13A and the second tooth tip 13B (FIG. 2) form the tooth tip 13 (FIG. 1).
- the inner peripheral surface 111A of the first yoke portion 11A is located at a position displaced radially outward from the inner peripheral surface 111B of the second yoke portion 11B.
- the side surface 121A of the first tooth portion 12A is located at a position displaced inward in the width direction (circumferential direction) from the side surface 121B of the second tooth portion 12B.
- the outer peripheral surface 131A of the first tooth tip 13A is located at a position displaced radially inward from the outer peripheral surface 131B of the second tooth tip 13B.
- the inner peripheral surface 111A of the first yoke portion 11A, the side surface 121A of the first tooth portion 12A, and the outer peripheral surface 131A of the first tooth tip portion 13A are all displaced in the direction of increasing the area of the slot 14. It is in.
- the step adjacent to the inner peripheral surface 111A of the first yoke portion 11A, the portion adjacent to the side surface 121A of the first teeth portion 12A, and the portion adjacent to the outer peripheral surface 131A of the first tooth tip portion 13A are stepped portions.
- 125 is formed. In other words, a step 125 facing the slot 14 is provided.
- At least one of the inner peripheral surface 111A of the first yoke portion 11A, the side surface 121A of the first teeth portion 12A, and the outer peripheral surface 131A of the first tooth tip portion 13A (for example, It suffices that the side surface 121A) of one tooth portion 12A is displaced in a direction to increase the area of the slot 14, and the step portion 125 is formed there.
- the outer peripheral surface 110 of the first yoke portion 11A is on the same plane as the outer peripheral surface 110 (FIG. 3) of the second yoke portion 11B. Further, the distal end face 130 of the first tooth tip 13A is on the same plane as the distal end face 130 (FIG. 3) of the second tooth tip 13B.
- the first yoke portion 11A is formed with a hole 16 into which the protrusion 26 (FIG. 8) of the insulator 2 is press-fitted.
- the hole 16 penetrates the first core 10A in the axial direction.
- the cross-sectional shape of the hole 16 is the same as the cross-sectional shape of the hole 16 of the second yoke 11B described above.
- a crimping portion 18 and a concave portion 19 are formed in the first yoke portion 11A, and their arrangement and shape are the same as those formed in the second yoke portion 11B (FIG. 3).
- FIG. 6A is a perspective view showing the stator core 10 (split core 9).
- the portion adjacent to the inner peripheral surface 111A of the first yoke portion 11A, the portion adjacent to the side surface 121A of the first teeth portion 12A, and the portion adjacent to the outer peripheral surface 131A of the first tooth tip portion 13A include: A step 125 is formed.
- the insulator 2 described below fits into the step portion 125.
- FIG. 6B is a perspective view showing a state where the insulator 2 is attached to the stator core 10.
- the insulators 2 are attached one by one to both ends in the axial direction of the stator core 10, that is, to the first core portion 10A (FIG. 6A).
- the insulator 2 is made of, for example, a resin such as polybutylene terephthalate (PBT).
- Each insulator 2 has a wall 25 attached to the yoke 11, a body 22 attached to the teeth 12, and a flange 21 attached to the tooth tip 13.
- the flange portion 21 and the wall portion 25 face each other in the radial direction with the body portion 22 interposed therebetween.
- the coil 4 is wound around the body 22.
- the flange portion 21 and the wall portion 25 guide the coil 4 wound around the body portion 22 from both sides in the radial direction.
- the flange 21 and the wall 25 may be provided with a step 23 for positioning the coil 4 wound around the body 22.
- FIG. 6C is a perspective view showing a state where the insulator 2 and the insulating film 3 are attached to the stator core 10.
- the insulating film 3 is attached to the surface of the stator core 10 on the slot 14 side of the second core portion 10B.
- the insulating film 3 is made of, for example, a resin of polyethylene terephthalate (PET).
- PET polyethylene terephthalate
- the insulating film 3 covers the inner peripheral surface 111B of the second yoke portion 11B, the side surface 121B of the second tooth portion 12B, and the outer peripheral surface 131B of the second tooth tip portion 13B (all shown in FIG. 6B). I have.
- the insulator 2 and the insulating film 3 electrically insulate the stator core 10 from the coil 4 in the slot 14.
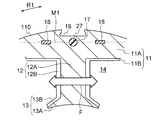
- FIG. 7A is a cross-sectional view of the tooth 12 and the insulator 2 and the insulating film 3 around the tooth 12 in a plane orthogonal to the radial direction.
- the step portions 125 are formed on both circumferential sides of the first teeth portion 12A.
- the insulator 2 is attached to the axial end of the tooth 12 by fitting into the step 125.
- the step portion 125 is formed on the inner peripheral surface 111A of the first yoke portion 11A (FIG. 6A) in the circumferential direction and on the outer peripheral surface 131A of the first tooth tip portion 13A (FIG. 6A). ) Is also formed on the outside in the radial direction.
- the insulator 2 is attached so as not to protrude from the teeth 12 toward the slot 14.
- the effective area of the slot 14 can be increased, and the number of turns of the coil 4 can be increased.
- FIG. 7B is a cross-sectional view corresponding to FIG. 7A, showing the teeth 12 and the insulator 200 of the comparative example.
- the teeth 12 have a rectangular cross section, and the insulator 200 is provided so as to surround the teeth 12 from both ends in the axial direction and both ends in the circumferential direction (that is, both side surfaces).
- the insulator 200 protrudes toward the slot 14, the effective area of the slot 14 is smaller than that of the configuration shown in FIG.
- FIG. 8 is a longitudinal sectional view showing the electric motor 100.
- the stator core 10 has the first core 10A at both ends in the axial direction, and has the second core 10B at the center in the axial direction.
- the axial length of the stator core 10 is 45 mm
- the axial length of each of the first core portions 10A is 5 mm
- the axial length of the second core portion 10B is 35 mm.
- FIGS. 9 (C) and 9 (D) which will be described later, and FIGS. 13 and 14, the thickness of the laminated steel sheet is shown thick for convenience of illustration.
- the stator core 10 has the hole 16 as described above.
- the hole 16 penetrates through the stator core 10 (that is, the first core 10A and the second core 10B) in the axial direction.
- the hole 16 only needs to penetrate the first core 10A and reach the second core 10B.
- the insulator 2 has a projection 26 that is press-fitted into the hole 16 of the stator core 10.
- the protrusion 26 protrudes in the axial direction from the wall 25 of the insulator 2.
- the protrusion 26 passes through the first core 10A and reaches the position of the second core 10B in the hole 16.
- the cross-sectional shape of the protrusion 26 is the same as the cross-sectional shape of the hole 16.
- FIG. 9A is a cross-sectional view showing the first core unit 10A
- FIG. 9B is a cross-sectional view showing the second core unit 10B
- FIG. 9C is a cross-sectional view taken along line 9C-9C shown in FIG.
- FIG. 9D is a cross-sectional view taken along line 9D-9D shown in FIG.
- a step portion 125 is formed on the slot 14 side of the first core portion 10A.
- the insulator 2 is fitted into the step 125.
- the insulator 2 is attached to the axial end of the stator core 10 (that is, the first core 10A).
- the protrusion 26 of the insulator 2 is fitted in the hole 16 in the first core portion 10A and the second core portion 10B. In other words, the protrusion 26 of the insulator 2 penetrates the first core 10A and reaches the second core 10B.
- the volume of the first core portion 10A is relatively small, but the volume of the second core portion 10B is large. That is, the second core portion 10B serves as a base. Therefore, when the protrusion 26 of the insulator 2 penetrates the first core 10A and reaches the second core 10B, the insulator 2 and the first core 10A can be firmly fixed to the second core 10B. it can.
- the stator 1 shown in FIG. 1 is completed.
- the electric motor of the comparative example has the same configuration as the electric motor 100 of the first embodiment except that it does not have the hole 16 and the projection 26.
- components of the electric motor of the comparative example will be described with the same reference numerals as those of the electric motor 100 of the first embodiment.
- FIG. 10A is a cross-sectional view showing a first core portion 10A of a comparative example
- FIG. 10B is a cross-sectional view showing a second core portion 10B of a comparative example
- FIG. 10C is a cross-sectional view taken along line 10C-10C shown in FIG.
- the first core portion 10A and the second core portion 10B have no hole 16 formed therein. Further, the protrusion 2 is not formed on the insulator 2.
- the coil 4 is wound around the teeth 12 via the insulator 2.
- the load F due to the winding of the coil 4 is applied to the first teeth portion 12A via the insulator 2. Therefore, the first teeth portion 12A may be displaced in the width direction (ie, the circumferential direction) that is the winding direction of the coil 4.
- the controllability and vibration characteristics of the electric motor 100 are affected.
- FIGS. 11A and 11B are cross-sectional views showing the first core unit 10A and the second core unit 10B of the first embodiment, respectively. As shown in FIGS. 11A and 11B, a hole 16 is formed in the first core portion 10A and the second core portion 10B. The protrusion 26 of the insulator 2 is fitted in the hole 16 in the first core portion 10A and the second core portion 10B.
- the load F due to the winding of the coil 4 is applied to the first teeth portion 12A via the insulator 2.
- the protrusion 26 of the insulator 2 is fitted in the hole 16 in the first core portion 10A and the second core portion 10B, and the first core portion 10A is firmly fixed to the second core portion 10B. Therefore, displacement of the first teeth portion 12A is prevented.
- the controllability and the vibration characteristics of the electric motor 100 can be kept good.
- the protrusion 26 is formed so as to protrude downward from a protrusion 25a (FIG. 6C) that protrudes radially outward from the circumferential center of the wall 25 of the insulator 2.
- a protrusion 25a FIG. 6C
- the present invention is not limited to such a configuration, as long as it protrudes in the axial direction from the insulator 2 and fits into the hole 16.
- FIGS. 12A to 12F are diagrams showing a configuration example of the hole 16 and the step 125 of the stator core 10 according to the first embodiment.
- the configuration example shown in FIG. 12A is as described with reference to FIG. 5 and FIGS. 9A to 9D.
- a radial straight line passing through the center of the first tooth portion 12A in the width direction is defined as a straight line T1.
- the straight line T1 can be said to be a straight line passing through the center of the first teeth portion 12A in the circumferential direction and the central axis C1 (FIG. 1).
- the hole 16 of the yoke 11 (11A, 11B) is formed on the straight line T1 and has a shape symmetric with respect to the straight line T1.
- the step portions 125 on both sides of the first tooth portion 12A are formed at positions symmetrical to each other with respect to the straight line T1, and have shapes symmetrical to each other.
- both the hole 16 and the step 125 of the stator core 10 are formed symmetrically with respect to the straight line T1.
- concave portions 112 retreated radially outward are formed on the inner peripheral surface 111A of the first yoke portion 11A and on both sides of the first teeth portion 12A.
- the recess 112 forms a part of the step 125.
- the concave portions 112 are respectively formed at two positions symmetrical with respect to the straight line T1 in the first yoke portion 11A. That is, the step portion 125 including the concave portion 112 is formed symmetrically with respect to the straight line T1.
- the hole 16 is as described with reference to FIG.
- the first tooth tip 13A and the second tooth tip 13B have the same shape. That is, the outer peripheral surface 131A of the first tooth tip 13A and the outer peripheral surface 131B of the second tooth tip 13B are located on the same plane. Therefore, the step portion 125 is formed along the inner peripheral surface 111A of the first yoke portion 11A and the side surface 121A of the tooth 12, and is not formed on the outer peripheral surface 131A of the first tooth tip portion 13A. Also in this configuration example, the step portion 125 is formed symmetrically with respect to the straight line T1.
- the hole 16 is as described with reference to FIG.
- the concave portion 112 described with reference to FIG. 12B is formed only on one side of the teeth 12 in the circumferential direction. Therefore, the step portion 125 including the concave portion 112 is formed asymmetrically with respect to the straight line T1.
- the hole 16 is as described with reference to FIG.
- two holes 16 are formed in the yoke 11 at two locations symmetrical with respect to the straight line T1.
- the two holes 16 have shapes symmetric with respect to the straight line T1.
- the step portion 125 is as described with reference to FIG.
- a hole 16 is formed in the yoke 11 on one side of the straight line T1. That is, the hole 16 is formed asymmetrically with respect to the straight line T1.
- the step portion 125 is as described with reference to FIG. 12 (F).
- the holes 16 are formed symmetrically with respect to the straight line T1. If the hole 16 is formed asymmetrically with respect to the straight line T1, the load (moment) applied to the stator core 10 from the coil 4 via the insulator 2 becomes unbalanced on both sides in the circumferential direction, and the stator core 10 is deformed. Thus, the effect of suppressing the displacement of the first teeth portion 12A is reduced.
- the hole 16 is formed symmetrically with respect to the straight line T1
- the load (moment) applied to the stator core 10 from the coil 4 via the insulator 2 is balanced on both sides in the circumferential direction, and the deformation of the stator core 10 is prevented. Can be suppressed. Thereby, the effect of suppressing the displacement of the first teeth portion 12A can be enhanced.
- the step portion 125 is formed symmetrically with respect to the straight line T1.
- the step portion 125 is formed symmetrically with respect to the straight line T1 in terms of energy efficiency, controllability, and vibration characteristics of the electric motor 100.
- FIG. 13 is a cross-sectional view showing the hole 16 and the protrusion 26.
- the hole 16 penetrates the first core 10A as described above, but it is desirable that the hole 16 also penetrates the second core 10B. This is because if the hole 16 penetrates the second core 10B, the second core 10B can be formed of one type of laminated steel sheet.
- the protrusions 26 of the two insulators 2 are press-fitted into the holes 16 from both axial end surfaces of the first core portion 10A, and abut against each other at the center of the holes 16 in the axial direction.
- the length of the protrusion 26 can be maximized, and the effect of suppressing the displacement of the first teeth 12A can be enhanced.
- FIG. 14 is a cross-sectional view illustrating another example of the hole 16 and the protrusion 26.
- the hole 16 penetrates the first core 10A, and further penetrates the second core 10B.
- Each of the protrusions 26 of the two insulators 2 is press-fitted into the hole 16 from both axial end surfaces of the first core 10A, but does not abut each other. Therefore, a hollow portion B into which the protrusion 26 is not press-fitted exists in the axial center portion of the hole 16.
- FIG. 15 is a view showing a positional relationship between the swaged portion 18 and the hole 16 of the stator core 10 (FIG. 1).
- the caulking portions 18 that is, fixing portions
- the fixing portion for fixing the laminated steel plate is not limited to the caulked portion, and may be, for example, an adhesive portion (adhesive layer).
- a straight line connecting the two caulking portions 18 is defined as a straight line M1.
- the hole 16 is formed so as to overlap with a straight line M1 connecting the two caulking portions 18.
- the load F caused by the winding of the coil 4 is applied to the first core portion 10A via the insulator 2, and further transmitted to the second core portion 10B via the protrusion 26 in the hole 16.
- the straight line M1 connecting the two caulking portions 18 is parallel to the width direction of the teeth 12 (that is, the direction orthogonal to the straight line T1). Since the load F due to the winding of the coil 4 is parallel to the width direction of the teeth 12, forming the hole 16 on the straight line M1 allows the caulking portion 18 to effectively receive the load. That is, the displacement of the first teeth portion 12A due to the winding of the coil 4 can be effectively prevented.
- FIG. 16 is a diagram showing another example of the positional relationship between the caulking portion 18 and the hole 16.
- the caulking portion 18 is formed on the yoke 11 on one side in the circumferential direction of the hole 16 (for example, on the left side in the figure).
- an adhesive portion adhesive layer may be used instead of the caulked portion.
- the caulking portion 18 can receive the load caused by the winding of the coil 4. That is, the displacement of the first teeth portion 12A due to the winding of the coil 4 can be suppressed.
- FIG. 17 is a view showing a state where the stator 1 is attached to the sealed container 6 (for example, the frame 301 shown in FIG. 34) of the compressor, and the coil 4 is omitted.
- the stator core 10 is fitted inside the cylindrical closed container 6 by shrink fitting, for example. Therefore, the stator core 10 receives a compressive stress from the closed container 6.
- FIG. 18 is a view for explaining a fitting state between the first core portion 10A and the second core portion 10B and the sealed container 6.
- the outer peripheral surface 110 of each of the first core portion 10A and the second core portion 10B is in contact with the closed container 6. Therefore, the first core portion 10A and the second core portion 10B receive a compressive stress radially inward from the sealed container 6 as indicated by arrows in the drawing.
- the first core portion 10A has a shorter division surface portion 15 than the second core portion 10B, compressive stress is likely to be concentrated, thereby possibly lowering magnetic properties.
- the hole 16 has a function of releasing the compressive stress from the closed container 6. Therefore, even if a compressive stress is applied from the closed container 6, a decrease in the magnetic characteristics of the first core portion 10A can be suppressed.
- the stator core 10 has the first core portion 10A at the axial end and the second core portion 10B at the central portion in the axial direction, and the first core portion 10A is The area of the slot 14 is larger than that of the core part 10B.
- the stator core 10 has a hole 16 that penetrates the first core 10A and reaches the second core 10B.
- the insulator 2 has a protrusion 26 inserted into the hole 16 to the position of the second core 10B. Therefore, the first core portion 10A can be firmly fixed to the second core portion 10B by the protrusion 26 of the insulator 2. As a result, it is possible to suppress the displacement of the first teeth portion 12A with respect to the load due to the winding of the coil 4.
- the first tooth portion 12A in the first core portion 10A of the stator core 10 is smaller than the circumferential width of the second teeth portion 12B in the second core portion 10B, the first tooth portion 12A A step portion 125 can be formed on the side, and the insulator 2 can be fitted to the step portion 125.
- the caulking portion 18 can receive the load due to the winding of the coil 4. Thereby, the effect of suppressing the displacement of the first teeth portion 12A can be enhanced.
- the hole 16 is provided so as to overlap the straight line M ⁇ b> 1 connecting the plurality of caulking portions 18, the load caused by the winding of the coil 4 can be received by the plurality of caulking portions 18. Thereby, the effect of suppressing the displacement of the first teeth portion 12A can be further enhanced.
- the hole 16 is formed symmetrically with respect to the radial straight line T1 passing through the center of the teeth 12 in the width direction, the load applied to the stator core 10 from the coil 4 via the insulator 2 is applied to both sides in the circumferential direction. Balancing, whereby the effect of suppressing the displacement of the first teeth portion 12A can be enhanced.
- the insulator 2 is fitted into the step 125 between the first core portion 10A and the second core portion 10B of the stator core 10, the amount of protrusion of the insulator 2 toward the slot 14 can be reduced.
- the effective area of the slot 14 can be increased, and the number of turns of the coil 4 can be increased.
- coil resistance that is, copper loss
- the stepped portion 125 is formed symmetrically with respect to the radial straight line T1 passing through the center of the teeth 12 in the width direction, a load applied to the stator core 10 from the coil 4 via the insulator 2 on both sides in the circumferential direction. Balancing, whereby the effect of suppressing the displacement of the first teeth portion 12A can be enhanced.
- the second core 10B can be formed of one type of laminated steel sheet, and the manufacturing cost can be reduced.
- the protrusion 26 penetrates the first core portion 10A and the second core portion 10B in the axial direction, the length of the protrusion 26 can be sufficiently ensured, and the first tooth portion 12A is displaced. Can be enhanced.
- stator core 10 since the stator core 10 is fitted on the inner peripheral surface of the sealed container 6 at the outer peripheral surface 110 thereof, the stator core 10 receives the compressive stress from the closed container 6. 10 can be prevented from deteriorating in magnetic properties.
- stator core 10 in which the plurality of divided cores 9 are connected has been described, but the stator core 10 integrally formed in an annular shape may be used.
- FIG. 19 (A) is a cross-sectional view showing first core portion 10A of stator core 10 according to the second embodiment
- FIG. 19 (B) is a cross-sectional view showing second core portion 10B
- FIG. 19C is a cross-sectional view taken along line 19C-19C shown in FIG.
- FIG. 19D is a cross-sectional view taken along line 19D-19D shown in FIG.
- the second embodiment differs from the first embodiment in the cross-sectional shapes of the hole 17 and the protrusion 27.
- a hole 17 is formed in the first yoke 11A of the first core 10A and the second yoke 11B of the second core 10B.
- the hole 17 extends in the axial direction, and has a circular cross section.
- the hole portion 17 desirably penetrates the first core portion 10A and the second core portion 10B in the axial direction, but it is sufficient that the hole portion 17 penetrates the first core portion 10A and reaches the second core portion 10B.
- the arrangement of the holes 17 is the same as that of the holes 16 of the first embodiment (FIG. 9A).
- the insulator 2 attached to the first core portion 10A has a protrusion 27 that is pressed into the hole 17.
- the cross-sectional shape of the protrusion 27 is circular.
- the protrusion 27 passes through the first core 10A in the hole 17 and reaches the position of the second core 10B. Therefore, the first core portion 10A can be firmly fixed to the second core portion 10B, and the displacement of the first teeth portion 12A can be suppressed.
- FIGS. 20A to 20F are diagrams illustrating a configuration example of the hole 17 and the step 125 of the stator core 10 according to the second embodiment.
- the configuration example shown in FIG. 20A is as described with reference to FIGS. 19A to 19D.
- a radial straight line passing through the center in the width direction of the first tooth portion 12A is defined as a straight line T1.
- the hole 17 of the yoke 11 is formed on the straight line T1 and has a shape symmetric with respect to the straight line T1.
- the step portions 125 on both sides of the first tooth portion 12A are formed at positions symmetric to each other with respect to the straight line T1, and have shapes symmetric to each other.
- the concave portion 112 described with reference to FIG. 12B is formed.
- the step portion 125 including the concave portion 112 is formed symmetrically with respect to the straight line T1.
- the hole 17 is as described with reference to FIG.
- the step portion 125 is formed along the inner peripheral surface 111A of the first yoke portion 11A and the side surface 121A of the tooth 12. It is not formed on the outer peripheral surface 131A of the first tooth tip 13A. Also in this configuration example, the step portion 125 is formed symmetrically with respect to the straight line T1.
- the hole 17 is as described with reference to FIG.
- the concave portion 112 described with reference to FIG. 20B is formed only on one side of the teeth 12 in the circumferential direction. Therefore, the step portion 125 including the concave portion 112 is formed asymmetrically with respect to the straight line T1.
- the hole 17 is as described with reference to FIG.
- two holes 17 are formed in the yoke 11 at two locations symmetrical with respect to the straight line T1.
- the two holes 17 have shapes symmetric with respect to the straight line T1.
- the step portion 125 is as described with reference to FIG.
- a hole 17 is formed in the yoke 11 on one side of the straight line T1. That is, the hole 17 is formed asymmetrically with respect to the straight line T1.
- the step portion 125 is as described with reference to FIG.
- the holes 17 are formed symmetrically with respect to the straight line T1. Therefore, the load (moment) applied to the stator core 10 from the coil 4 via the insulator 2 is balanced on both sides in the circumferential direction, and the deformation of the stator core 10 can be suppressed. Thereby, the effect of suppressing the displacement of the first teeth portion 12A can be enhanced.
- the step portion 125 is formed symmetrically with respect to the straight line T1. Therefore, for the same reason as when the holes 17 are formed symmetrically, the deformation of the stator core 10 is suppressed, and the effect of suppressing the displacement of the first teeth 12A can be enhanced. It is also desirable to form the step portion 125 symmetrically with respect to the straight line T1 in terms of the energy efficiency, controllability, and vibration characteristics of the motor.
- FIG. 21 is a view showing a positional relationship between the swaged portion 18 and the hole 17 of the stator core 10.
- the swaged portion 18 that is, the fixed portion
- the swaged portion 18 of the stator core 10 is formed on the yoke 11 on both sides in the circumferential direction of the hole 17.
- an adhesive portion adhesive layer may be provided instead of the caulking portion 18.
- the hole 17 is formed so as to overlap the straight line M1 connecting the two caulking portions 18.
- the caulked portions 18 can receive a load due to the winding of the coil 4.
- the straight line M1 connecting the two caulking portions 18 is parallel to the width direction of the tooth 12, the caulking portion 18 can effectively receive the load, and the first tooth portion 12A can be effectively displaced. Can be prevented.
- FIG. 22 is a diagram showing another example of the positional relationship between the swaged portion 18 and the hole 17 of the stator core 10.
- the caulking portion 18 is formed on one side in the circumferential direction with respect to the hole portion 17. Also in this case, by providing the hole portion 17 so as to overlap with the straight line M1 passing through the caulking portion 18 in parallel with the width direction of the tooth 12, the load caused by the winding of the coil 4 can be received by the caulking portion 18. The displacement of the teeth 12A can be suppressed.
- FIG. 23 is a view for explaining a fitting state between the first core portion 10A and the second core portion 10B and the closed container 6 when the stator 1 of the second embodiment is attached to the closed container 6.
- first core portion 10A and second core portion 10B receive a compressive stress in a direction radially inward from sealed container 6.
- the first core portion 10A has a shorter dividing surface portion 15 than the second core portion 10B, so that compressive stress is easily concentrated.
- the hole portion 17 has a function of releasing the compressive stress from the closed container 6, the magnetic force is reduced. Deterioration of characteristics can be suppressed.
- the configuration of the stator according to the second embodiment is the same as that of the stator according to the first embodiment except for the hole 17 and the protrusion 27 described above.
- the first core 10A is It can be firmly fixed to the second core portion 10B. Therefore, it is possible to suppress the displacement of the first teeth portion 12A with respect to the load caused by the winding of the coil 4.
- the cross-sectional shape of the hole 16 and the protrusion 26 in the first embodiment is semicircular, and the cross-section of the hole 17 and the protrusion 27 in the second embodiment is circular.
- the cross-sectional shape of the portion may be another shape.
- FIG. FIG. 24 is a diagram showing an insulator complex 2A and a split core 9 according to the third embodiment.
- the insulators 2 provided in each of the split cores 9 (that is, each of the teeth 12) are independent from each other.
- the insulators 2 provided on the plurality of divided cores 9 that are adjacent in the circumferential direction are integrated to constitute the insulator composite 2A.
- two insulators 2 provided on two adjacent split cores 9 are integrated to constitute an insulator complex 2A.
- the number of the insulators 2 constituting the insulator composite 2A is not limited to two, and may be three or more.
- the configuration of each insulator 2 is as described in the second embodiment.
- the configuration of the split core 9 is as described in the first embodiment.
- a projection 27 of the insulator 2 is press-fitted into a hole 17 formed in the yoke 11 of the split core 9.
- the cross-sectional shapes of the hole 17 and the protrusion 27 are circular here, but may be semicircular like the hole 16 and the protrusion 26 of the first embodiment.
- FIG. 24 shows only the insulator complex 2A provided at one end in the axial direction of the split core 9, but the same insulator complex 2A is provided at the other end in the axial direction.
- the split core 9 including the first core portion 10A and the second core portion 10B (FIG. 8).
- the insulator composite body 2A as a resin molded body is attached to the two split cores 9.
- the coil 4 is wound around each tooth 12 via each insulator 2 of the insulator composite 2A and the insulating film 3 (FIG. 6C).
- the plurality of insulator composites 2A are combined in an annular shape with the divided cores 9, and the divided cores 9 are integrally fixed by, for example, welding.
- the load acting on one tooth 12 due to the winding of the coil 4 is dispersed to the other teeth 12 via the insulator complex 2A. Therefore, a load can be received by the plurality of teeth 12, and the effect of suppressing the displacement of the first teeth portion 12A due to the winding of the coil 4 can be enhanced.
- FIG. 25 is a diagram showing an example in which the insulator composite 2A of the third embodiment is attached to the integral stator core 10.
- the stator core 10 shown in FIG. 25 is different from the stator core 10 shown in FIG. 1 in that the stator core 10 does not have the dividing surface portion 15 shown in FIG. That is, the stator core 10 is formed by laminating electromagnetic steel sheets punched in a ring shape in the axial direction.
- three insulators 2 are integrated to form one insulator composite 2A. Since the stator core 10 has nine teeth 12, three insulator composites 2A are attached to the stator core 10. Note that the number of teeth 12 is not limited to nine. Further, the insulator composite 2A only needs to integrate at least two insulators 2.
- stator core 10 including a first core portion 10A and a second core portion 10B (FIG. 8). Then, the three insulator composite bodies 2A, which are resin molded bodies, are attached to the stator core 10. Thereafter, the coil 4 is wound around each tooth 12 via the insulator composite 2A and the insulating film 3 (FIG. 6C).
- the load acting on one tooth 12 by winding the coil 4 applies to the other tooth 12.
- the load acting on one tooth 12 by winding the coil 4 applies to the other tooth 12.
- the effect of suppressing the displacement of the first teeth portion 12A can be enhanced.
- FIG. 26 is a diagram illustrating an insulator complex 2B and a split core 9 according to a modification of the third embodiment.
- all the insulators 2 of the insulator composite 2A have the protrusions 27.
- only one insulator 2 of the insulator complex 2B has the protrusion 27.
- the cross-sectional shapes of the hole 17 and the protrusion 27 are circular here, but may be semicircular like the hole 16 and the protrusion 26 of the first embodiment.
- one of the plurality of insulators 2 constituting the insulator composite 2B has a protrusion 27, and if the protrusion 27 is press-fitted into the hole 17, the first core 10A of the stator core 10 is connected to the second core 10B. (FIG. 8), it is possible to suppress the displacement of the first teeth portion 12A.
- FIG. 27 is a diagram illustrating an example in which the insulator composite body 2B according to the modification of the third embodiment is attached to the integral stator core 10.
- the stator core 10 shown in FIG. 27 has the same configuration as the integrated stator core 10 shown in FIG.
- the insulator complex 2B has three insulators 2. Since the stator core 10 has nine teeth 12, three insulator composites 2B are attached to the stator core 10. Note that the number of teeth 12 is not limited to nine. Further, the insulator complex 2B only needs to have at least two insulators 2.
- the load acting on one tooth 12 by winding the coil 4 is distributed to the other teeth 12 as well. Therefore, the effect of suppressing the displacement of the first teeth portion 12A can be enhanced.
- the amount of resin constituting the insulator composite 2B can be reduced as compared with the case where all the insulators 2 have the protrusion 27.
- the protrusion 27 is provided only on one insulator 2 of the insulator complex 2B. However, as long as some of the insulators 2 constituting the insulator complex 2B have the protrusion 27. Good.
- FIG. 28 is a diagram illustrating an insulator composite 2C and an integral stator core 10 according to the fourth embodiment.
- all the insulators 2 attached to the stator core 10 are integrated into a ring to form an insulator composite 2C.
- the stator core 10 has nine teeth 12, and the nine insulators 2 are integrated in a ring shape.
- the number of the teeth 12 and the number of the insulators 2 are not limited to nine, and may be two or more.
- All the insulators 2 of the insulator composite 2C have the protrusions 27.
- Each projection 27 is press-fitted into a hole 17 formed in the yoke 11 of the stator core 10.
- the cross-sectional shapes of the hole 17 and the protrusion 27 are circular here, but may be semicircular like the hole 16 and the protrusion 26 of the first embodiment.
- stator core 10 including a first core portion 10A and a second core portion 10B (FIG. 8).
- the insulator composite body 2A which is a resin molded body, is attached to the stator core 10.
- the coil 4 is wound around each tooth 12 via the insulator 2 and the insulating film 3 (FIG. 6C).
- the first core 10A is firmly fixed to the second core 10B (FIG. 8) and the first teeth The effect of suppressing the displacement of the portion 12A is maximized.
- FIG. 29 is a diagram illustrating an insulator complex 2D and an integrated stator core 10 according to a modification of the fourth embodiment.
- all the insulators 2 of the insulator composite 2C have the protrusions 27.
- only one insulator 2 of the insulator complex 2D has the protrusion 27.
- the cross-sectional shapes of the hole 17 and the protrusion 27 are circular here, but may be semicircular like the hole 16 and the protrusion 26 of the first embodiment.
- the stator core 10 has nine teeth 12, and the nine insulators 2 are integrated in a ring shape. Further, only one of the nine insulators 2 constituting the insulator composite 2D has the protrusion 27. In this case, compared to the case where all the insulators 2 of the insulator composite 2D have the protruding portions 27, the resin constituting the insulator composite 2D can be reduced.
- the number of the teeth 12 and the number of the insulators 2 are not limited to nine, and may be two or more.
- the first core portion 10A is firmly fixed to the second core portion 10B (FIG. 8) to prevent the first teeth portion 12A from being displaced.
- the effect of suppression is increased.
- the amount of resin constituting the insulator composite 2D can be reduced as compared with the case where all the insulators 2 have the protrusion 27.
- the protrusion 27 is provided only on one insulator 2 of the insulator complex 2D, but it is sufficient that some of the insulators 2 constituting the insulator complex 2D have the protrusion 27.
- FIG. FIGS. 30A and 30B are views showing the insulator composites 2E and 2F of Embodiment 5 together with the split core 9.
- FIG. 1 the insulators 2 provided in the plurality of divided cores 9 adjacent in the circumferential direction are integrated.
- the insulators 2 provided on the divided cores 9 which are separated in the circumferential direction are integrated to constitute an insulator composite body 2E (2F).
- the insulator complex 2E shown in FIG. 30A and the insulator complex 2F shown in FIG. 30B are attached to a stator core 10 including nine split cores 9.
- An insulator complex 2E (also referred to as a first insulator complex) shown in FIG. 30A includes four insulators 2 arranged at intervals in a circumferential direction and a ring-shaped bridge 201 connecting these insulators. Have.
- the insulator composite 2E is integrally formed of a resin such as PBT.
- the bridge portion 201 of the insulator complex 2E is connected to the tip of the flange portion 21 of each insulator 2 (that is, the radial inner end).
- the four insulators 2 are arranged at intervals of one insulator 2 except for one location (lower side in the figure) at intervals of two insulators 2.
- a split core 9 is attached to each insulator 2 of the insulator composite 2E.
- Each insulator 2 has a projection 27, which is pressed into the hole 17 of the yoke 11 of the split core 9.
- the coil 4 is wound around the teeth 12 via the above-described insulating film 3 (FIG. 6C). Since a wide space is secured between the insulators 2 that are adjacent in the circumferential direction, the coil 4 can be easily wound.
- An insulator complex 2F (also referred to as a second insulator complex) illustrated in FIG. 30B includes five insulators 2 arranged at intervals in a circumferential direction and a ring-shaped bridge portion 202 connecting these insulators. Have.
- the insulator composite 2F is integrally formed of a resin such as PBT.
- the bridge portion 202 of the insulator composite 2F is connected to the distal end (that is, the radial inner end) of the flange portion 21 of each insulator 2.
- the two lower insulators 2 in the figure are integrally formed with each other. Except for this one portion (the lower side in the figure), the five insulators 2 are arranged at intervals of one insulator 2.
- a split core 9 is attached to each insulator 2 of the insulator composite 2F.
- Each insulator 2 has a projection 27, which is pressed into the hole 17 of the yoke 11 of the split core 9.
- the coil 4 is wound around the teeth 12 via the above-described insulating film 3 (FIG. 6C). Since a wide space is secured between the insulators 2 that are adjacent in the circumferential direction, the coil 4 can be easily wound.
- FIG. 31 (A) is a diagram of a part of the insulator complex 2E viewed from the radial inside
- FIG. 31 (B) is a diagram of a part of the insulator complex 2F viewed from the radial inside
- FIG. 31 (C) is a diagram of the combined state of the insulator complexes 2E and 2F as viewed from the radial inside.
- the bridge portion 201 of the insulator composite 2E is connected to the flange portion 21 of the insulator 2 on one side (the lower side in the figure) of the split core 9 in the axial direction.
- the insulators 2 are separated from each other, and are attached to the axial end of the split core 9 by fitting.
- the bridge portion 202 of the insulator composite 2F is disposed on the flange portion 21 of the insulator 2 on one side (lower side in the figure) of the split core 9 via the pedestal portion 203. Connected. On the other side (upper side in the figure) of the split core 9 in the axial direction, the insulators 2 are separated from each other, and are attached to the axial end of the split core 9 by fitting.
- the bridge portions 201 and 202 of the insulator composites 2E and 2F are axially shifted from each other by the pedestal portion 203 of the bridge portion 202.
- the split core 9 including the first core portion 10A and the second core portion 10B (FIG. 8).
- the insulator cores 2E and 2F are attached to the split cores 9 respectively.
- the coil 4 is wound around the teeth 12 of each split core 9 via the insulators 2 of the insulator composites 2E and 2F and the insulating film 3 (FIG. 6C).
- the insulator complexes 2E and 2F are combined as shown in FIG.
- the insulator 2 (and the insulator 2) of the insulator complex 2F is placed between two adjacent insulators 2 (and the split core 9) of the insulator complex 2E.
- a split core 9) is arranged.
- the insulator 2 (and the split core 9) of the insulator composite 2E is arranged between two adjacent insulators 2 (and the split core 9) of the insulator composite 2F.
- the pedestal portion 203 of the insulator complex 2F is located radially outside the bridge portion 202 of the insulator complex 2E.
- the bridge portions 201 and 202 of the insulator composites 2E and 2F are axially shifted from each other by the pedestal portion 203 of the bridge portion 202. Therefore, the bridge units 201 and 202 do not interfere with each other.
- the divided cores 90 are fixed to each other by welding or the like. Thereby, the stator 1 is completed.
- the bridge portions 201 and 202 are provided on the same side in the axial direction with respect to the stator core 10 (divided core 9). However, as described below, the bridge portions 201 and 202 are They may be provided on opposite sides of each other.
- FIG. 32 (A) is a diagram of a part of the insulator complex 2E as viewed from the radial inside
- FIG. 32 (B) is a diagram of a part of the insulator complex 2F as seen from the radial inside
- FIG. 32 (C) is a view of the combined state of the insulator complexes 2E and 2F as viewed from the radial inside.
- the bridge portion 201 of the insulator composite 2E is provided on the flange portion 21 of the insulator 2 on one side (lower side in the figure) of the split core 9 via the pedestal portion 204. Connected.
- the bridge portion 202 of the insulator composite 2F is connected to the flange portion 21 of the insulator 2 on the other axial side of the split core 9 (upper side in the drawing) via the pedestal portion 205. It is connected.
- the plurality of insulators 2 are connected via the bridge portions 201 and 202 to form the insulator complexes 2E and 2F. Therefore, each of the insulator complexes 2E and 2F and the split core 9 attached thereto can be handled as one unit. Therefore, the assembly process of the stator 1 is simplified.
- FIGS. 33A and 33B are views showing insulator composite bodies 2G and 2H according to a modification of the fifth embodiment, together with split core 9.
- the radial outside of the insulator 2 is connected by the bridge portions 210 and 212.
- the insulator complex 2G shown in FIG. 33A has four insulators 2 arranged at intervals in the circumferential direction, and a ring-shaped bridge portion 210 connecting these insulators.
- the bridge 210 is connected to a protrusion 211 that protrudes radially outward from the wall 25 of each insulator 2.
- the arrangement of the insulator 2 is the same as the arrangement of the insulator 2 shown in FIG.
- a split core 9 is attached to each insulator 2 of the insulator composite 2G.
- Each insulator 2 has a projection 27, which is pressed into the hole 17 of the yoke 11 of the split core 9.
- the insulator complex 2H shown in FIG. 33 (B) has five insulators 2 arranged at intervals in the circumferential direction, and a ring-shaped bridge portion 212 connecting these insulators.
- the bridge portion 212 is connected to a protruding portion 213 that protrudes radially outward from the wall portion 25 of each insulator 2.
- the arrangement of the insulator 2 is the same as the arrangement of the insulator 2 shown in FIG.
- a split core 9 is attached to each insulator 2 of the insulator complex 2H.
- Each insulator 2 has a projection 27, which is pressed into the hole 17 of the yoke 11 of the split core 9.
- the bridge portions 210 and 212 of the insulator composites 2G and 2H may be provided on the same side in the axial direction as shown in FIGS. 31 (A) to 31 (C), and FIGS. 32 (A) to 32 (C). May be provided on the opposite side in the axial direction.
- the insulator complexes 2G and 2H can be combined so as not to interfere with the bridge portions 210 and 212.
- the plurality of insulators 2 are connected via the bridge portions 210 and 212 to form the insulator composites 2G and 2H. Therefore, each of the insulator composites 2G and 2H and the split core 9 attached thereto can be handled as one unit. Therefore, the assembly process of the stator 1 is simplified.
- FIG. 34 is a cross-sectional view showing the rotary compressor 300.
- the rotary compressor 300 includes a frame (sealed container) 301, a compression mechanism 310 provided in the frame 301, and an electric motor 100 that drives the compression mechanism 310.
- the compression mechanism 310 includes a cylinder 311 having a cylinder chamber 312, a rolling piston 314 fixed to the shaft 58 of the electric motor 100, a vane (not shown) for dividing the inside of the cylinder chamber 312 into a suction side and a compression side, and a shaft 58. Are inserted to close the axial end surface of the cylinder chamber 312.
- An upper discharge muffler 318 and a lower discharge muffler 319 are mounted on the upper frame 316 and the lower frame 317, respectively.
- the frame 301 is, for example, a cylindrical container formed by drawing a steel plate having a thickness of 3 mm. Refrigeration oil (not shown) that lubricates each sliding portion of the compression mechanism 310 is stored at the bottom of the frame 301.
- the shaft 58 is rotatably held by the upper frame 316 and the lower frame 317.
- the cylinder 311 has a cylinder chamber 312 inside.
- the rolling piston 314 rotates eccentrically in the cylinder chamber 312.
- the shaft 58 has an eccentric shaft portion, and the rolling piston 314 is fitted to the eccentric shaft portion.
- the stator core 10 of the electric motor 100 is mounted inside the frame 301 by shrink fitting. Electric power is supplied to the coil 4 wound around the stator core 10 from a glass terminal 305 fixed to the frame 301. A shaft 58 is fixed to the shaft hole 55 (FIG. 1) of the rotor 5.
- An accumulator 302 for storing the refrigerant gas is mounted outside the frame 301.
- a suction pipe 303 is fixed to the frame 301, and refrigerant gas is supplied from the accumulator 302 to the cylinder 311 via the suction pipe 303.
- a discharge pipe 307 for discharging the refrigerant to the outside is provided at an upper portion of the frame 301.
- refrigerant for example, R410A, R407C, R22 or the like can be used. From the viewpoint of preventing global warming, it is desirable to use a refrigerant having a low GWP (global warming potential).
- the low GWP refrigerant for example, the following refrigerants can be used.
- the GWP of HFO-1234yf is 4.
- a hydrocarbon having a carbon double bond in the composition for example, R1270 (propylene) may be used.
- R1270 has a GWP of 3, which is lower than HFO-1234yf, but its flammability is higher than HFO-1234yf.
- a mixture containing at least one of a halogenated hydrocarbon having a carbon double bond in its composition or a hydrocarbon having a carbon double bond in its composition for example, a mixture of HFO-1234yf and R32. May be used. Since the above-mentioned HFO-1234yf is a low-pressure refrigerant, the pressure loss tends to be large, and there is a possibility that the performance of a refrigeration cycle (particularly, an evaporator) is reduced. Therefore, it is practically desirable to use a mixture with R32 or R41 which is a high-pressure refrigerant than HFO-1234yf.
- the operation of the rotary compressor 300 is as follows.
- the refrigerant gas supplied from the accumulator 302 is supplied into the cylinder chamber 312 of the cylinder 311 through the suction pipe 303.
- the shaft 58 rotates together with the rotor 5.
- the rolling piston 314 fitted to the shaft 58 rotates eccentrically in the cylinder chamber 312, and the refrigerant is compressed in the cylinder chamber 312.
- the compressed refrigerant passes through the discharge mufflers 318 and 319, further rises in the frame 301 through a hole (not shown) provided in the electric motor 100, and is discharged from the discharge pipe 307.
- the electric motor described in each of the above-described embodiments has good controllability and vibration characteristics by suppressing the displacement of the first teeth portion 12A. Therefore, the operation efficiency of the compressor 300 can be improved by using the electric motor described in each embodiment as a drive source of the compressor 300.
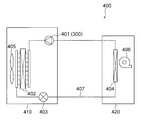
- FIG. 35 is a diagram illustrating the air conditioner 400.
- the air conditioner 400 illustrated in FIG. 35 includes a compressor 401, a condenser 402, a throttle device (decompression device) 403, and an evaporator 404.
- the compressor 401, the condenser 402, the expansion device 403, and the evaporator 404 are connected by a refrigerant pipe 407 to constitute a refrigeration cycle. That is, the refrigerant circulates in the order of the compressor 401, the condenser 402, the expansion device 403, and the evaporator 404.
- the compressor 401, the condenser 402, and the expansion device 403 are provided in the outdoor unit 410.
- the compressor 401 includes the rotary compressor 300 shown in FIG.
- the outdoor unit 410 is provided with an outdoor blower 405 for supplying outdoor air to the condenser 402.
- the evaporator 404 is provided in the indoor unit 420.
- the indoor unit 420 is provided with an indoor blower 406 that supplies indoor air to the evaporator 404.
- the operation of the air conditioner 400 is as follows.
- the compressor 401 compresses and sends out the sucked refrigerant.
- the condenser 402 performs heat exchange between the refrigerant flowing from the compressor 401 and the outdoor air, condenses and liquefies the refrigerant, and sends the refrigerant to the refrigerant pipe 407.
- the outdoor blower 405 supplies outdoor air to the condenser 402.
- the expansion device 403 adjusts the pressure and the like of the refrigerant flowing through the refrigerant pipe 407 by changing the opening degree.
- the evaporator 404 performs heat exchange between the refrigerant brought into a low-pressure state by the expansion device 403 and the indoor air, causes the refrigerant to deprive the heat of the air, evaporates (vaporizes), and sends the refrigerant to the refrigerant pipe 407.
- the indoor blower 406 supplies indoor air to the evaporator 404.
- the cool air whose heat has been removed by the evaporator 404 is supplied indoors.
- the air conditioner 400 uses the compressor 401 whose operation efficiency is improved by applying the electric motor described in each embodiment. Therefore, the operation efficiency of the air conditioner 400 can be improved.
- stator ⁇ 2 ⁇ insulator, ⁇ 2A, 2B, 2C, 2D, 2E, 2F, 2G, 2H ⁇ insulator composite, ⁇ 3 ⁇ insulating film, ⁇ 4 ⁇ coil, ⁇ 5 ⁇ rotor, ⁇ 6 ⁇ hermetic container, ⁇ 9, 9A, 9B ⁇ split core, ⁇ 10 ⁇ stator core, 10A first core portion, ⁇ 10B ⁇ second core portion, ⁇ 11 ⁇ yoke, ⁇ 11A ⁇ first yoke portion, ⁇ 11B ⁇ second yoke portion, ⁇ 12 ⁇ teeth, ⁇ 12A ⁇ first teeth portion, ⁇ 12B ⁇ second teeth portion, ⁇ 13 ⁇ tooth tip portion, ⁇ 13A ⁇ first Tip tip, ⁇ 13B ⁇ second tip, ⁇ 14 ⁇ slot, ⁇ 15 ⁇ split face, ⁇ 16, 17 ⁇ hole, ⁇ 18 ⁇ caulking, ⁇ 19 ⁇ recess, ⁇ 20 ⁇ body, ⁇ 21 ⁇ flange, ⁇ 25 ⁇ wall, ⁇ 26,
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
- Insulation, Fastening Of Motor, Generator Windings (AREA)
Abstract
ステータは、中心軸を中心とする周方向に延在するヨークと、ヨークから中心軸に向かって延在するティースと、ティースに周方向に隣接するスロットとを有するステータコアと、ティースに巻き付けられ、スロットに収容されたコイルとを有する。ステータコアは、中心軸の軸方向の端部に位置する第1コア部と、軸方向の中央部に位置する第2コア部とを有する。第1コア部におけるスロットの面積は、第2コア部におけるスロットの面積よりも大きい。第1コア部には、ティースとコイルとの間に位置するインシュレータが設けられている。ステータコアは、第1コア部を貫通して第2コア部に達する穴部を有する。インシュレータは、穴部に第2コア部の位置まで挿入される突起部を有する。
Description
本発明は、ステータ、電動機、圧縮機および空気調和装置に関する。
電動機のステータは、コイルを巻き付ける複数のティースを有するステータコアを備える。隣り合うティースの間には、コイルを収容するスロットが形成される。各ティースには、コイルとティースとを絶縁するためのインシュレータが設けられている(例えば、特許文献1)。
ここで、スロットの有効面積を大きくするためには、ティースの側面(すなわち周方向端部)にインシュレータを設けず、ティースの軸方向端部のみにインシュレータを設けることが望ましい。そのため、ティースの軸方向端部の幅を狭くして、インシュレータを嵌合させる段差部を形成する必要がある。しかしながら、この場合、コイルの巻き付け時に、ティースの軸方向端部にインシュレータを介して荷重が加わり、ティースの軸方向端部の位置ずれが生じる可能性がある。
本発明は、上記の課題を解決するためになされたものであり、ティースの位置ずれを抑制することを目的とする。
本発明のステータは、中心軸を中心とする周方向に延在するヨークと、ヨークから中心軸に向かって延在するティースと、ティースに周方向に隣接するスロットとを有するステータコアと、ティースに巻き付けられ、スロットに収容されたコイルとを有する。ステータコアは、中心軸の軸方向の端部に位置する第1コア部と、軸方向の中央部に位置する第2コア部とを有し、第1コア部におけるスロットの面積は、第2コア部におけるスロットの面積よりも大きい。第1コア部には、ティースとコイルとの間に位置するインシュレータが設けられている。ステータコアは、第1コア部を貫通して第2コア部に達する穴部を有する。インシュレータは、穴部に第2コア部の位置まで挿入される突起部を有する。
この発明では、インシュレータの突起部が、ステータコアの穴部に、第2コア部に到達する位置まで挿入されるため、第1コア部に第2コア部を強固に固定し、ティースの位置ずれを抑制することができる。
実施の形態1.
<電動機の構成>
本発明の実施の形態1の電動機100について説明する。図1は、本発明の実施の形態1の電動機100を示す断面図である。電動機100は、ロータ5に永久磁石53が埋め込まれた永久磁石埋込型電動機であり、例えばロータリ圧縮機300(図34)に用いられる。
<電動機の構成>
本発明の実施の形態1の電動機100について説明する。図1は、本発明の実施の形態1の電動機100を示す断面図である。電動機100は、ロータ5に永久磁石53が埋め込まれた永久磁石埋込型電動機であり、例えばロータリ圧縮機300(図34)に用いられる。
電動機100は、インナーロータ型と呼ばれる電動機であり、ステータ1と、ステータ1の内側に回転可能に設けられたロータ5とを有する。ステータ1とロータ5との間には、例えば0.3~1.0mmのエアギャップが形成されている。
以下では、ロータ5の回転軸である中心軸C1の方向を、単に「軸方向」と称する。また。中心軸C1を中心とする周方向(図1に矢印R1で示す)を、単に「周方向」と称する。また、中心軸C1を中心とする半径方向を、単に「径方向」と称する。なお、図1は、中心軸C1に直交する面における断面図である。
<ロータの構成>
ロータ5は、円筒状のロータコア50と、ロータコア50に取り付けられた永久磁石53と、ロータコア50の中央部に固定されたシャフト58とを有する。シャフト58は、例えば、圧縮機300(図34)のシャフトである。
ロータ5は、円筒状のロータコア50と、ロータコア50に取り付けられた永久磁石53と、ロータコア50の中央部に固定されたシャフト58とを有する。シャフト58は、例えば、圧縮機300(図34)のシャフトである。
ロータコア50は、積層鋼板を軸方向に積層し、カシメ部等で一体化したものである。積層鋼板は、例えば電磁鋼板であり、板厚は、例えば0.1~0.7mm(一例としては、0.35mm)である。
ロータコア50の外周面に沿って、永久磁石53が挿入される複数の磁石挿入孔51が形成されている。磁石挿入孔51は、ロータコア50を軸方向に貫通する貫通孔である。各磁石挿入孔51は、1磁極に相当する。磁石挿入孔51の数は、ここでは6であり、従って磁極数は6である。但し、磁石挿入孔51の数は6に限定されるものではなく、2以上であればよい。
磁石挿入孔51は、その周方向中央部が最も中心軸C1側に突出するように、V字状に形成されている。各磁石挿入孔51には、周方向中心部を挟んで両側に、2つの永久磁石53が配置されている。同じ磁石挿入孔51に配置された2つの永久磁石53は、互いに同じ極が径方向外側を向くように着磁されている。
永久磁石53は、軸方向に長い平板状の部材であり、ロータコア50の周方向に幅を有し、径方向に厚さを有する。永久磁石53の厚さは、例えば2mmである。永久磁石53は、例えば、ネオジウム(Nd)、鉄(Fe)およびボロン(B)を主成分とする希土類磁石で構成されている。永久磁石53は、厚さ方向に着磁されている。
なお、上記の希土類磁石は、温度の上昇と共に保磁力が低下する性質を有し、低下率は-0.5~-0.6%/Kである。圧縮機で想定される最大負荷発生時に希土類磁石の減磁が生じないようにするためには、1100~1500A/mの保磁力が必要である。この保磁力を150℃の雰囲気温度下で確保するためには、常温(20℃)での保磁力が1800~2300A/mであることが必要である。
そのため、希土類磁石には、ディスプロシウム(Dy)を添加してもよい。希土類磁石の常温での保磁力は、Dyを添加していない状態で1800A/mであり、2重量%のDyを添加することで2300A/mとなる。但し、Dyの添加は製造コストの増加の原因となり、また残留磁束密度の低下を招く。そのため、Dyの添加量をできるだけ少なくするか、またはDyを添加しないことが望ましい。
ここでは、各磁石挿入孔51に2つの永久磁石53を配置しているが、各磁石挿入孔51に1つずつ永久磁石53を配置してもよい。この場合、磁石挿入孔51は、上述したV字状ではなく、直線状に形成する。
磁石挿入孔51の周方向両端部には、フラックスバリア(漏れ磁束抑制穴)52が形成されている。フラックスバリア52は、隣り合う磁極間の漏れ磁束を抑制するものである。フラックスバリア52とロータコア50の外周との間のコア部分は、隣り合う磁極間の磁束の短絡を抑制するため、薄肉部となっている。薄肉部の厚さは、ロータコア50の積層鋼板の厚さと同じであることが望ましい。
<ステータの構成>
ステータ1は、ステータコア10と、ステータコア10に巻き付けられたコイル4とを有する。ステータコア10は、積層鋼板を軸方向に積層し、カシメ部18により一体化したものである。積層鋼板は、例えば電磁鋼板であり、板厚は、例えば0.1~0.7mm(一例としては、0.35mm)である。
ステータ1は、ステータコア10と、ステータコア10に巻き付けられたコイル4とを有する。ステータコア10は、積層鋼板を軸方向に積層し、カシメ部18により一体化したものである。積層鋼板は、例えば電磁鋼板であり、板厚は、例えば0.1~0.7mm(一例としては、0.35mm)である。
ステータコア10は、中心軸C1を中心とする環状のヨーク11と、ヨーク11から径方向内側(すなわち中心軸C1に向かう方向)に延在する複数のティース12とを有する。ティース12は、径方向内側の端部に、ロータ5の外周面に対向する歯先部13を有する。
ここでは、9つのティース12が周方向に一定間隔で配置されているが、ティース12の数は2以上であればよい。周方向に隣り合うティース12の間には、コイル4を収容する空間であるスロット14が形成される。
また、ステータコア10は、ティース12毎に複数(ここでは9つ)の分割コア9が周方向に連結された構成を有する。これらの分割コア9は、ヨーク11に形成された分割面部15で互いに連結されている。分割面部15は、例えば、周方向に隣り合うティース12の中間位置に形成されている。分割コア9は、分割面部15の溶接または凹凸形状(図示せず)の嵌合により、互いに接合される。
コイル4は、例えば、マグネットワイヤを、インシュレータ2および絶縁フィルム3(図6(C))を介してティース12に巻き付けたものである。コイル4の線径は、例えば1.0mmである。コイル4は、各ティース12に、集中巻により例えば80ターン巻かれている。なお、コイル4の線径およびターン数は、要求される回転数、トルク、印加電圧あるいはスロット14の面積に応じて決定される。
ステータコア10は、後述する図8に示すように、軸方向両端部に位置する第1コア部10Aと、軸方向中央部に位置する第2コア部10Bとを有する。なお、第1コア部10Aは、ステータコア10の軸方向両端部に限らず、軸方向の少なくとも一端部に設けられていればよい。
図2は、ステータコア10の第2コア部10B(すなわち軸方向中央部のコア部)を示す平面図である。第2コア部10Bは、環状の第2ヨーク部11Bと、第2ヨーク部11Bから径方向内側に延在する複数の第2ティース部12Bとを有する。第2ティース部12Bは、その径方向内側の端部に、第2ティース部12Bの他の部分よりも幅の広い第2歯先部13Bを有する。
第2コア部10Bは、それぞれ1つの第2ティース部12Bを含む複数の分割コア9Bが、上述した分割面部15で連結された構成を有する。
図3は、第2コア部10Bの1つの分割コア9Bを示す図である。第2ヨーク部11Bは、径方向外側の外周面110と、径方向内側の内周面111Bとを有する。第2ティース部12Bは、周方向両側の側面121Bを有する。第2歯先部13Bは、ロータ5に対向する先端面130と、径方向外側の外周面131Bとを有する。
第2ヨーク部11Bの内周面111Bと、第2ティース部12Bの側面121Bと、第2歯先部13Bの外周面131Bとは、スロット14に面している。
第2ヨーク部11Bの外周面110には、凹部19が形成されている。凹部19は、コイル4の巻き付け時にステータコア10を保持する治具が係合する部分であり、また、電動機100が圧縮機に取り付けられた状態で冷媒流路となる部分である。凹部19は、例えば、第2ティース部12Bの幅方向中心を通る径方向の直線上に配置されている。
第2ヨーク部11Bには、インシュレータ2の突起部26(図8)が圧入される穴部16が形成されている。穴部16は、第2コア部10Bを軸方向に貫通していることが望ましい。但し、穴部16は、第2コア部10Bを軸方向に貫通していなくても、第2コア部10Bの軸方向端部から軸方向に延在していればよい。
穴部16の断面形状は半円形であり、直線部分が径方向外側を向いている。そのため、比較的大きな断面積の穴部16を、第2ヨーク部11Bの外周寄りに形成することができる。すなわち、穴部16を、磁束の流れをできるだけ遮らないように配置することができる。但し、穴部16の断面形状は、半円形に限定されるものではない。
第2ヨーク部11Bには、積層鋼板を互いに固定するカシメ部18が形成されている。カシメ部18は、穴部16の周方向両側に2つ形成されている。カシメ部18は、ここではVカシメであるが、例えば丸カシメであってもよい。
図4は、ステータコア10の第1コア部10A(すなわち軸方向端部のコア部)を示す平面図である。第1コア部10Aは、環状の第1ヨーク部11Aと、第1ヨーク部11Aから径方向内側に延在する複数の第1ティース部12Aとを有する。第1ティース部12Aは、その径方向内側の端部に、第1ティース部12Aの他の部分よりも幅の広い第1歯先部13Aを有する。
第1コア部10Aは、それぞれ1つの第1ティース部12Aを含む複数の分割コア9Aが、上述した分割面部15で連結された構成を有する。
図5は、第1コア部10Aの1つの分割コア9Aを示す図である。図5には、さらに第2コア部10Bの分割コア9B(図3)の輪郭を破線で示している。第1ヨーク部11Aは、径方向外側の外周面110と、径方向内側の内周面111Aとを有する。第1ティース部12Aは、周方向両側の側面121Aを有する。第1歯先部13Aは、ロータ5に対向する先端面130と、径方向外側の外周面131Aとを有する。
第1ヨーク部11Aの内周面111A、第1ティース部12Aの側面121A、および第1歯先部13Aの外周面131Aは、いずれもスロット14に面している。
第1ヨーク部11Aと第2ヨーク部11B(図2)とにより、ヨーク11(図1)が形成される。第1ティース部12Aと第2ティース部12B(図2)とにより、ティース12(図1)が形成される。第1歯先部13Aと第2歯先部13B(図2)とにより、歯先部13(図1)が形成される。
第1ヨーク部11Aの内周面111Aは、第2ヨーク部11Bの内周面111Bよりも径方向外側に変位した位置にある。また、第1ティース部12Aの側面121Aは、第2ティース部12Bの側面121Bよりも幅方向(周方向)内側に変位した位置にある。第1歯先部13Aの外周面131Aは、第2歯先部13Bの外周面131Bよりも径方向内側に変位した位置にある。
すなわち、第1ヨーク部11Aの内周面111A、第1ティース部12Aの側面121A、および第1歯先部13Aの外周面131Aは、いずれも、スロット14の面積を大きくする方向に変位した位置にある。
そのため、第1ヨーク部11Aの内周面111Aに隣接する部分、第1ティース部12Aの側面121Aに隣接する部分、および第1歯先部13Aの外周面131Aに隣接する部分には、段差部125が形成される。言い換えると、スロット14に面する段差部125が設けられる。
なお、このような構成に限らず、第1ヨーク部11Aの内周面111A、第1ティース部12Aの側面121A、および第1歯先部13Aの外周面131Aのうちの少なくとも1つ(例えば第1ティース部12Aの側面121A)が、スロット14の面積を大きくする方向に変位し、そこに段差部125が形成されていればよい。
第1ヨーク部11Aの外周面110は、第2ヨーク部11Bの外周面110(図3)と同一面上にある。また、第1歯先部13Aの先端面130は、第2歯先部13Bの先端面130(図3)と同一面上にある。
第1ヨーク部11Aには、インシュレータ2の突起部26(図8)が圧入される穴部16が形成されている。穴部16は、第1コア部10Aを軸方向に貫通している。穴部16の断面形状は、上述した第2ヨーク部11Bの穴部16の断面形状と同じである。
第1ヨーク部11Aには、カシメ部18および凹部19が形成されているが、これらの配置および形状は、第2ヨーク部11B(図3)に形成されているものと同じである。
図6(A)は、ステータコア10(分割コア9)を示す斜視図である。上記の通り、第1ヨーク部11Aの内周面111Aに隣接する部分、第1ティース部12Aの側面121Aに隣接する部分、および第1歯先部13Aの外周面131Aに隣接する部分には、段差部125が形成される。この段差部125に、次に説明するインシュレータ2が嵌合する。
図6(B)は、ステータコア10にインシュレータ2を取り付けた状態を示す斜視図である。インシュレータ2は、ステータコア10の軸方向の両端部、すなわち第1コア部10A(図6(A))に、1つずつ取り付けられている。インシュレータ2は、例えばポリブチレンテレフタレート(PBT)等の樹脂で構成される。
各インシュレータ2は、ヨーク11に取り付けられる壁部25と、ティース12に取り付けられる胴部22と、歯先部13に取り付けられるフランジ部21とを有する。フランジ部21と壁部25とは、胴部22を挟んで径方向に互いに対向している。
胴部22には、コイル4が巻き付けられる。フランジ部21および壁部25は、胴部22に巻き付けられたコイル4を径方向両側からガイドする。フランジ部21および壁部25には、胴部22に巻き付けられるコイル4を位置決めする段差部23を設けてもよい。
図6(C)は、ステータコア10にインシュレータ2および絶縁フィルム3を取り付けた状態を示す斜視図である。ステータコア10のうち、第2コア部10Bのスロット14側の面には、絶縁フィルム3が取り付けられている。絶縁フィルム3は、例えばポリエチレンテレフタレート(PET)の樹脂で構成される。絶縁フィルム3は、第2ヨーク部11Bの内周面111Bと、第2ティース部12Bの側面121Bと、第2歯先部13Bの外周面131B(いずれも図6(B))とを覆っている。
インシュレータ2および絶縁フィルム3は、ステータコア10と、スロット14内のコイル4とを電気的に絶縁する。
図7(A)は、ティース12と、その周囲のインシュレータ2および絶縁フィルム3を示す、径方向に直交する面における断面図である。上述したように、第1ティース部12Aの周方向両側には、段差部125が形成される。インシュレータ2は、段差部125に嵌合することにより、ティース12の軸方向端部に取り付けられる。なお、上述したように、段差部125は、第1ヨーク部11Aの内周面111A(図6(A))の周方向内側および第1歯先部13Aの外周面131A(図6(A))の径方向外側にも形成される。
このように構成されているため、インシュレータ2は、ティース12からスロット14側に突出しないように取り付けられる。これにより、スロット14の有効面積を大きくし、コイル4の巻数を多くすることができる。このようにコイル4の巻数を多くすることで、コイル抵抗(すなわち銅損)が低減し、モータ効率が向上する。
図7(B)は、比較例のティース12とインシュレータ200とを示す、図7(A)に対応する断面図である。比較例では、ティース12が矩形状の断面を有し、このティース12を軸方向両端と周方向両端(すなわち両側面)から囲むようにインシュレータ200が設けられる。この比較例では、インシュレータ200がスロット14側に突出するため、図7(A)に示した構成と比較して、スロット14の有効面積が小さくなる。
図8は、電動機100を示す縦断面図である。上記の通り、ステータコア10は、軸方向両端部に第1コア部10Aを有し、軸方向中央部に第2コア部10Bを有する。例えば、ステータコア10の軸方向長さが45mmの場合、第1コア部10Aの軸方向長さはそれぞれ5mmであり、第2コア部10Bの軸方向長さは35mmである。なお、図8並びに後述する図9(C),(D)、図13および図14では、図示の便宜上、積層鋼板の厚さを厚く示している。
ステータコア10には、上記の通り、穴部16が形成されている。穴部16は、ここでは、ステータコア10(すなわち第1コア部10Aおよび第2コア部10B)を軸方向に貫通している。但し、穴部16は、第1コア部10Aを貫通して第2コア部10Bに到達していればよい。
インシュレータ2は、ステータコア10の穴部16に圧入される突起部26を有する。突起部26は、インシュレータ2の壁部25から軸方向に突出している。突起部26は、穴部16内において、第1コア部10Aを通過して、第2コア部10Bの位置まで到達している。突起部26の断面形状は、穴部16の断面形状と同じである。
図9(A)は、第1コア部10Aを示す断面図であり、図9(B)は、第2コア部10Bを示す断面図である。図9(C)は、図9(A)に示した線分9C-9Cにおける矢視方向の断面図である。図9(D)は、図9(A)に示した線分9D-9Dにおける矢視方向の断面図である。
図9(A)~(C)に示すように、第1コア部10Aのスロット14側には、段差部125が形成される。この段差部125に、インシュレータ2が嵌合する。これにより、インシュレータ2は、ステータコア10の軸方向端部(すなわち第1コア部10A)に取り付けられる。
図9(D)に示すように、インシュレータ2の突起部26は、第1コア部10Aおよび第2コア部10Bにおいて穴部16に嵌合している。言い換えると、インシュレータ2の突起部26は、第1コア部10Aを貫通して第2コア部10Bに到達している。
ステータコア10では、第1コア部10Aの体積は比較的小さいが、第2コア部10Bの体積は大きい。すなわち、第2コア部10Bは、土台となる。そのため、インシュレータ2の突起部26が第1コア部10Aを貫通して第2コア部10Bに到達することにより、インシュレータ2および第1コア部10Aを第2コア部10Bに強固に固定することができる。
ステータ1を組み立てる際には、図8に示したように積層鋼板を積層して、第1コア部10Aおよび第2コア部10Bからなる分割コア9を形成する。そして、分割コア9の軸方向両端部の第1コア部10Aにインシュレータ2をそれぞれ取り付ける。このとき、インシュレータ2の突起部26を、穴部16に圧入する。
その後、分割コア9の第2ティース部12Bの側面に絶縁フィルム3(図6(C))を配置し、インシュレータ2および絶縁フィルム3を介して、ティース12にコイル4を巻き付ける。そして、9つの分割コア9を環状に組み合わせ、例えば溶接により一体に固定する。これにより、図1に示したステータ1が完成する。
次に、第1ティース部12Aの位置ずれ防止作用について、比較例と対比して説明する。比較例の電動機は、穴部16および突起部26を有さないことを除き、実施の形態1の電動機100と同様の構成を有する。説明の便宜上、比較例の電動機の構成要素にも、実施の形態1の電動機100の構成要素と同様の符号を付して説明する。
図10(A)は、比較例の第1コア部10Aを示す断面図であり、図10(B)は、比較例の第2コア部10Bを示す断面図である。図10(C)は、図10(A)に示した線分10C-10Cにおける矢視方向の断面図である。図10(A)および(B)に示すように、第1コア部10Aおよび第2コア部10Bには、穴部16が形成されていない。また、インシュレータ2には、突起部26が形成されていない。
図10(C)に示すように、コイル4は、インシュレータ2を介してティース12に巻き付けられる。コイル4の巻き付けによる荷重Fは、インシュレータ2を介して第1ティース部12Aに加わる。そのため、第1ティース部12Aが、コイル4の巻き付け方向である幅方向(すなわち周方向)に位置ずれする可能性がある。第1ティース部12Aの位置ずれが生じると、電動機100の制御性および振動特性に影響が及ぶ。
図11(A)および(B)は、実施の形態1の第1コア部10Aおよび第2コア部10Bをそれぞれ示す断面図である。図11(A)および(B)に示すように、第1コア部10Aおよび第2コア部10Bには、穴部16が形成されている。また、インシュレータ2の突起部26は、第1コア部10Aおよび第2コア部10Bにおいて穴部16に嵌合している。
比較例と同様、コイル4の巻き付けによる荷重Fは、インシュレータ2を介して第1ティース部12Aに加わる。しかしながら、インシュレータ2の突起部26が、第1コア部10Aおよび第2コア部10Bにおいて穴部16に嵌合しており、第1コア部10Aを第2コア部10Bに強固に固定しているため、第1ティース部12Aの位置ずれが防止される。このように第1ティース部12Aの位置ずれが防止されることにより、電動機100の制御性および振動特性を良好に保つことができる。
なお、突起部26は、インシュレータ2の壁部25の周方向中央部から径方向外側に突出する凸部25a(図6(C))から下方に突出するように形成されている。但し、このような構成に限らず、インシュレータ2から軸方向に突出して穴部16に嵌合していればよい。
図12(A)~(F)は、実施の形態1のステータコア10の穴部16および段差部125の構成例を示す図である。図12(A)に示した構成例は、図5および図9(A)~(D)を参照して説明した通りである。図12(A)において、第1ティース部12Aの幅方向の中心を通る径方向の直線を、直線T1とする。なお、直線T1は、第1ティース部12Aの周方向中心と中心軸C1(図1)とを通る直線ということもできる。
図12(A)に示した構成例では、ヨーク11(11A,11B)の穴部16は、直線T1上に形成され、直線T1に対して対称な形状を有する。第1ティース部12Aの両側の段差部125は、直線T1に対して互いに対称な位置に形成され、互いに対称な形状を有する。言い換えると、ステータコア10の穴部16および段差部125は、いずれも、直線T1に対して対称に形成されている。
図12(B)に示した構成例では、第1ヨーク部11Aの内周面111Aで且つ第1ティース部12Aの両側に、径方向外側に退避した凹部112がそれぞれ形成されている。この凹部112は、段差部125の一部を構成する。凹部112は、第1ヨーク部11Aにおいて直線T1に対して対称な2箇所にそれぞれ形成されている。すなわち、凹部112を含む段差部125は、直線T1に対して対称に形成されている。穴部16は、図12(A)を参照して説明した通りである。
図12(C)に示した構成例では、第1歯先部13Aと第2歯先部13Bとが同一形状を有する。すなわち、第1歯先部13Aの外周面131Aと第2歯先部13Bの外周面131Bとは、同一面上に位置する。そのため、段差部125は、第1ヨーク部11Aの内周面111Aと、ティース12の側面121Aに沿って形成され、第1歯先部13Aの外周面131Aには形成されない。この構成例でも、段差部125は、直線T1に対して対称に形成されている。穴部16は、図12(A)を参照して説明した通りである。
図12(D)に示した構成例では、ティース12の周方向の一方の側にのみ、図12(B)を参照して説明した凹部112が形成されている。そのため、凹部112を含む段差部125は、直線T1に対して非対称に形成されている。穴部16は、図12(A)を参照して説明した通りである。
図12(E)に示した構成例では、ヨーク11において直線T1に対して対称な2箇所に、それぞれ穴部16が形成されている。2つの穴部16は、直線T1に対して対称な形状を有する。段差部125は、図12(A)を参照して説明した通りである。
図12(F)に示した構成例では、ヨーク11において直線T1の一方の側に、穴部16が形成されている。すなわち穴部16は、直線T1に対して非対称に形成されている。段差部125は、図12(A)を参照して説明した通りである。
図12(A)~(F)に示した6つの構成例のうち、図12(A)~(E)の構成例では、穴部16が直線T1に対して対称に形成されている。穴部16が直線T1に対して非対称に形成されていると、コイル4からインシュレータ2を介してステータコア10に加わる荷重(モーメント)が周方向の両側でアンバランスになり、ステータコア10に変形が生じて、第1ティース部12Aの位置ずれ抑制効果が低下する。
これに対し、穴部16が直線T1に対して対称に形成されていると、コイル4からインシュレータ2を介してステータコア10に加わる荷重(モーメント)が周方向の両側でつり合い、ステータコア10の変形を抑えることができる。これにより、第1ティース部12Aの位置ずれを抑制する効果を高めることができる。
また、図12(A)~(C),(E)の構成例では、段差部125が直線T1に対して対称に形成されている。段差部125を直線T1に対して対称に形成することにより、穴部16を対称に形成した場合と同様の理由で、ステータコア10の変形を抑え、第1ティース部12Aの位置ずれを抑制する効果を高めることができる。また、段差部125を直線T1に対して対称に形成することは、電動機100のエネルギー効率、制御性および振動特性の面でも望ましい。
図13は、穴部16および突起部26を示す断面図である。穴部16は、上記の通り、第1コア部10Aを貫通しているが、さらに第2コア部10Bも貫通していることが望ましい。穴部16が第2コア部10Bを貫通していれば、第2コア部10Bを1種類の積層鋼板で形成することができるためである。
2つのインシュレータ2のそれぞれの突起部26は、第1コア部10Aの軸方向両端面から穴部16に圧入され、穴部16の軸方向中央で互いに当接する。これにより、突起部26の長さを最大限まで長くすることができ、第1ティース部12Aの位置ずれを抑制する効果を高めることができる。
図14は、穴部16および突起部26の他の例を示す断面図である。穴部16は、第1コア部10Aを貫通し、さらに第2コア部10Bも貫通している。2つのインシュレータ2のそれぞれの突起部26は、第1コア部10Aの軸方向両端面から穴部16に圧入されているが、互いに当接してはいない。そのため、穴部16の軸方向中央部には、突起部26が圧入されていない空洞部Bが存在する。
この場合も、突起部26が、穴部16において第2コア部10Bの位置に到達しているため、第1ティース部12Aの位置ずれを抑制する作用を発揮することができる。
図15は、ステータコア10(図1)のカシメ部18と穴部16との位置関係を示す図である。カシメ部18(すなわち固定部)は、ヨーク11において、穴部16の周方向両側に形成されている。なお、積層鋼板を固定する固定部は、カシメ部に限らず、例えば接着部(接着層)であってもよい。
図15において、2つのカシメ部18を結ぶ直線を、直線M1とする。穴部16は、2つのカシメ部18を結ぶ直線M1と重なるように形成されている。コイル4の巻き付けによる荷重Fは、インシュレータ2を介して第1コア部10Aに加わり、さらに穴部16内の突起部26を介して第2コア部10Bにも伝わる。突起部26の両側にカシメ部18を形成することにより、カシメ部18で荷重を受けることができる。
特に、2つのカシメ部18を結ぶ直線M1が、ティース12の幅方向(すなわち上記の直線T1に直交する方向)と平行であることが望ましい。コイル4の巻き付けによる荷重Fは、ティース12の幅方向と平行であるため、穴部16を直線M1上に形成することにより、カシメ部18で荷重を効果的に受けることができる。すなわち、コイル4の巻き付けによる第1ティース部12Aの位置ずれを効果的に防止することができる。
図16は、カシメ部18と穴部16との位置関係の他の例を示す図である。図16では、カシメ部18は、ヨーク11において、穴部16の周方向の一方の側(例えば図中左側)に形成されている。なお、カシメ部の代わりに、接着部(接着層)を用いてもよい。
この場合も、穴部16を、ティース12の幅方向と平行でカシメ部18を通る直線M1と重なるように形成することにより、コイル4の巻き付けによる荷重をカシメ部18で受けることができる。すなわち、コイル4の巻き付けによる第1ティース部12Aの位置ずれを抑制することができる。
図17は、ステータ1を、圧縮機の密閉容器6(例えば図34に示すフレーム301)に取り付けた状態を示す図であり、コイル4は省略している。ステータコア10は、例えば焼き嵌めにより、円筒状の密閉容器6の内側に嵌合している。そのため、ステータコア10は、密閉容器6から圧縮応力を受ける。
図18は、第1コア部10Aおよび第2コア部10Bと密閉容器6との嵌合状態を説明するための図である。第1コア部10Aおよび第2コア部10Bは、いずれも外周面110が密閉容器6に接している。そのため、第1コア部10Aおよび第2コア部10Bは、図中矢印で示すように、密閉容器6から径方向内側に向けて圧縮応力を受ける。
第1コア部10Aは、第2コア部10Bと比較して分割面部15が短いため、圧縮応力が集中しやすく、これにより磁気特性が低下する可能性がある。しかしながら、穴部16は、密閉容器6からの圧縮応力を逃がす作用を有する。そのため、密閉容器6から圧縮応力を受けても、第1コア部10Aにおける磁気特性の低下を抑制することができる。
<実施の形態の効果>
以上説明したように、実施の形態1では、ステータコア10が、軸方向端部の第1コア部10Aと軸方向中央部の第2コア部10Bとを有し、第1コア部10Aは第2コア部10Bよりもスロット14の面積が大きい。また、ステータコア10は、第1コア部10Aを貫通して第2コア部10Bに達する穴部16を有する。インシュレータ2は、穴部16に第2コア部10Bの位置まで挿入される突起部26を有する。そのため、インシュレータ2の突起部26により、第1コア部10Aを第2コア部10Bに強固に固定することができる。その結果、コイル4の巻き付けによる荷重に対して、第1ティース部12Aの位置ずれを抑制することができる。
以上説明したように、実施の形態1では、ステータコア10が、軸方向端部の第1コア部10Aと軸方向中央部の第2コア部10Bとを有し、第1コア部10Aは第2コア部10Bよりもスロット14の面積が大きい。また、ステータコア10は、第1コア部10Aを貫通して第2コア部10Bに達する穴部16を有する。インシュレータ2は、穴部16に第2コア部10Bの位置まで挿入される突起部26を有する。そのため、インシュレータ2の突起部26により、第1コア部10Aを第2コア部10Bに強固に固定することができる。その結果、コイル4の巻き付けによる荷重に対して、第1ティース部12Aの位置ずれを抑制することができる。
また、ステータコア10の第1コア部10Aにおける第1ティース部12Aの周方向の幅が、第2コア部10Bにおける第2ティース部12Bの周方向の幅よりも狭いため、第1ティース部12Aの側方に段差部125を形成することができ、この段差部125にインシュレータ2を嵌合させることができる。
また、ステータコア10のヨーク11およびティース12のうち、ヨーク11のみにカシメ部18(固定部)が設けられているため、ロータ5からティース12に流れる磁束をできるだけ遮らないようにし、エネルギー効率を向上することができる。
また、穴部16が、ティース12の幅方向と平行でカシメ部18を通る直線M1と重なるように設けられているため、コイル4の巻き付けによる荷重をカシメ部18で受けることができる。これにより、第1ティース部12Aの位置ずれを抑制する効果を高めることができる。
また、穴部16が、複数のカシメ部18を結ぶ直線M1と重なるように設けられているため、コイル4の巻き付けによる荷重を複数のカシメ部18で受けることができる。これにより、第1ティース部12Aの位置ずれを抑制する効果をさらに高めることができる。
また、穴部16が、ティース12の幅方向中心を通る径方向の直線T1に対して対称に形成されているため、コイル4からインシュレータ2を介してステータコア10に加わる荷重が周方向の両側で釣り合い、これにより第1ティース部12Aの位置ずれを抑制する効果を高めることができる。
また、インシュレータ2が、ステータコア10の第1コア部10Aと第2コア部10Bとの間の段差部125に嵌合するため、インシュレータ2のスロット14側への突出量を小さくすることができる。これにより、スロット14の有効面積を大きくし、コイル4の巻き数を増加させることができる。その結果、コイル抵抗(すなわち銅損)を低減し、モータ効率をさらに向上することができる。
また、段差部125が、ティース12の幅方向中心を通る径方向の直線T1に対して対称に形成されているため、コイル4からインシュレータ2を介してステータコア10に加わる荷重が周方向の両側で釣り合い、これにより第1ティース部12Aの位置ずれを抑制する効果を高めることができる。
また、穴部16が、第2コア部10Bを軸方向に貫通しているため、第2コア部10Bを1種類の積層鋼板で形成することができ、製造コストを低減することができる。また、突起部26が第1コア部10Aおよび第2コア部10Bを軸方向に貫通しているため、突起部26の長さを十分に確保することができ、第1ティース部12Aの位置ずれを抑制する効果を高めることができる。
また、ステータコア10が、その外周面110で密閉容器6の内周面に嵌合しているため、密閉容器6から圧縮応力を受けるが、穴部16によって圧縮応力を逃がすことができるため、ステータコア10の磁気特性の低下を抑制することができる。
なお、ここでは、複数の分割コア9を連結したステータコア10を用いる場合について説明したが、環状に一体に形成されたステータコア10を用いてもよい。
実施の形態2.
図19(A)は、実施の形態2のステータコア10の第1コア部10Aを示す断面図であり、図19(B)は、第2コア部10Bを示す断面図である。図19(C)は、図19(A)に示した線分19C-19Cにおける矢視方向の断面図である。図19(D)は、図9(A)に示した線分19D-19Dにおける矢視方向の断面図である。実施の形態2は、穴部17および突起部27の断面形状が、実施の形態1と異なる。
図19(A)は、実施の形態2のステータコア10の第1コア部10Aを示す断面図であり、図19(B)は、第2コア部10Bを示す断面図である。図19(C)は、図19(A)に示した線分19C-19Cにおける矢視方向の断面図である。図19(D)は、図9(A)に示した線分19D-19Dにおける矢視方向の断面図である。実施の形態2は、穴部17および突起部27の断面形状が、実施の形態1と異なる。
図19(A)および(B)に示すように、第1コア部10Aの第1ヨーク部11Aおよび第2コア部10Bの第2ヨーク部11Bには、穴部17が形成されている。穴部17は軸方向に延在し、断面形状は円形である。穴部17は、第1コア部10Aおよび第2コア部10Bを軸方向に貫通していることが望ましいが、第1コア部10Aを貫通して第2コア部10Bに到達していればよい。穴部17の配置は、実施の形態1の穴部16(図9(A))と同様である。
図19(C)および(D)に示すように、第1コア部10Aに取り付けられたインシュレータ2は、穴部17に圧入される突起部27を有する。突起部27の断面形状は、円形である。突起部27は、穴部17内において第1コア部10Aを通過し、第2コア部10Bの位置まで到達している。そのため、第1コア部10Aを第2コア部10Bに強固に固定し、第1ティース部12Aの位置ずれを抑制することができる。
図20(A)~(F)は、実施の形態2のステータコア10の穴部17および段差部125の構成例を示す図である。図20(A)に示した構成例は、図19(A)~(D)を参照して説明した通りである。図20(A)において、第1ティース部12Aの幅方向中心を通る径方向の直線を、直線T1とする。
図20(A)に示した構成例では、ヨーク11の穴部17は、直線T1上に形成され、直線T1に対して対称な形状を有する。また、第1ティース部12Aの両側の段差部125は、実施の形態1で説明したように、直線T1に対して互いに対称な位置に形成され、互いに対称な形状を有する。
図20(B)に示した構成例では、図12(B)を参照して説明した凹部112が形成されている。凹部112を含む段差部125は、直線T1に対して対称に形成されている。穴部17は、図20(A)を参照して説明した通りである。
図20(C)に示した構成例では、図12(C)を参照して説明したように、段差部125は、第1ヨーク部11Aの内周面111Aと、ティース12の側面121Aに沿って形成され、第1歯先部13Aの外周面131Aには形成されない。この構成例でも、段差部125は、直線T1に対して対称に形成されている。穴部17は、図20(A)を参照して説明した通りである。
図20(D)に示した構成例では、ティース12の周方向の一方の側にのみ、図20(B)を参照して説明した凹部112が形成されている。そのため、凹部112を含む段差部125は、直線T1に対して非対称に形成されている。穴部17は、図20(A)を参照して説明した通りである。
図20(E)に示した構成例では、ヨーク11において、直線T1に対して対称な2箇所に、それぞれ穴部17が形成されている。2つの穴部17は、直線T1に対して対称な形状を有する。段差部125は、図20(A)を参照して説明した通りである。
図20(F)に示した構成例では、ヨーク11において、直線T1の一方の側に、穴部17が形成されている。すなわち穴部17は、直線T1に対して非対称に形成されている。段差部125は、図20(A)を参照して説明した通りである。
図20(A)~(E)の構成例では、穴部17が直線T1に対して対称に形成されている。そのため、コイル4からインシュレータ2を介してステータコア10に加わる荷重(モーメント)が周方向の両側でつり合い、ステータコア10の変形を抑えることができる。これにより、第1ティース部12Aの位置ずれを抑制する効果を高めることができる。
また、図20(A)~(C),(E)の構成例では、段差部125が直線T1に対して対称に形成されている。そのため、穴部17を対称に形成した場合と同様の理由で、ステータコア10の変形を抑え、第1ティース部12Aの位置ずれを抑制する効果を高めることができる。また、段差部125を直線T1に対して対称に形成することは、モータのエネルギー効率、制御性および振動特性の面でも望ましい。
図21は、ステータコア10のカシメ部18と穴部17との位置関係を示す図である。ステータコア10のカシメ部18(すなわち固定部)は、ヨーク11において、穴部17の周方向両側に形成されている。なお、カシメ部18の代わりに、例えば接着部(接着層)を設けてもよい。
図21において、穴部17は、2つのカシメ部18を結ぶ直線M1と重なるように形成されている。このように突起部27の両側にカシメ部18を形成することにより、コイル4の巻き付けによる荷重をカシメ部18で受けることができる。特に、2つのカシメ部18を結ぶ直線M1が、ティース12の幅方向と平行であれば、カシメ部18で荷重を効果的に受けることができ、第1ティース部12Aの位置ずれを効果的に防止することができる。
図22は、ステータコア10のカシメ部18と穴部17との位置関係の他の例を示す図である。図22では、カシメ部18は、穴部17に対して周方向の一方の側に形成されている。この場合も、穴部17を、ティース12の幅方向と平行でカシメ部18を通る直線M1と重なるように設けることで、コイル4の巻き付けによる荷重をカシメ部18で受けることができ、第1ティース部12Aの位置ずれを抑制することができる。
図23は、実施の形態2のステータ1を密閉容器6に取り付けた際の、第1コア部10Aおよび第2コア部10Bと密閉容器6との嵌合状態を説明するための図である。実施の形態1で説明したように、第1コア部10Aおよび第2コア部10Bは、密閉容器6から径方向内側に向かう方向に圧縮応力を受ける。第1コア部10Aは、第2コア部10Bと比較して分割面部15が短いため、圧縮応力が集中し易いが、穴部17が密閉容器6からの圧縮応力を逃がす作用を有するため、磁気特性の低下を抑制することができる。
実施の形態2のステータの構成は、上述した穴部17および突起部27を除き、実施の形態1のステータと同様である。
以上説明したように、実施の形態2では、インシュレータ2の突起部27が、穴部17に第2コア部10Bの位置まで挿入されるため、実施の形態1と同様、第1コア部10Aを第2コア部10Bに強固に固定することができる。従って、コイル4の巻き付けによる荷重に対して、第1ティース部12Aの位置ずれを抑制することができる。
なお、実施の形態1の穴部16および突起部26の断面形状は半円形であり、実施の形態2の穴部17および突起部27の断面形状は円形状であったが、穴部および突起部の断面形は、他の形状であってもよい。
実施の形態3.
図24は、実施の形態3のインシュレータ複合体2Aと分割コア9とを示す図である。上述した実施の形態1,2では、各分割コア9(すなわち各ティース12)に設けられたインシュレータ2が互いに独立していた。これに対し、この実施の形態3では、周方向に隣り合う複数の分割コア9に設けられたインシュレータ2が一体化され、インシュレータ複合体2Aを構成している。
図24は、実施の形態3のインシュレータ複合体2Aと分割コア9とを示す図である。上述した実施の形態1,2では、各分割コア9(すなわち各ティース12)に設けられたインシュレータ2が互いに独立していた。これに対し、この実施の形態3では、周方向に隣り合う複数の分割コア9に設けられたインシュレータ2が一体化され、インシュレータ複合体2Aを構成している。
図24に示した構成例では、隣り合う2つの分割コア9に設けられた2つのインシュレータ2が一体化され、インシュレータ複合体2Aを構成している。なお、インシュレータ複合体2Aを構成するインシュレータ2の数は2つに限らず、3つ以上であってもよい。各インシュレータ2の構成は、実施の形態2で説明した通りである。分割コア9の構成は、実施の形態1で説明した通りである。
分割コア9のヨーク11に形成された穴部17には、インシュレータ2の突起部27が圧入されている。穴部17および突起部27の断面形状は、ここでは円形であるが、実施の形態1の穴部16および突起部26のように半円形であってもよい。
図24には、分割コア9の軸方向の一端部に設けられたインシュレータ複合体2Aのみを示すが、軸方向の他端部にも同様のインシュレータ複合体2Aが設けられている。
ステータ1を組み立てる際には、積層鋼板を積層して、第1コア部10Aおよび第2コア部10B(図8)からなる分割コア9を形成する。そして、樹脂成形体であるインシュレータ複合体2Aを、2つの分割コア9に取り付ける。その後、インシュレータ複合体2Aの各インシュレータ2および絶縁フィルム3(図6(C))を介して、各ティース12にコイル4を巻き付ける。そして、複数のインシュレータ複合体2Aを分割コア9と共に環状に組み合わせ、分割コア9を例えば溶接により一体に固定する。
この実施の形態3では、コイル4の巻き付けによって1つのティース12に作用する荷重が、インシュレータ複合体2Aを介して他のティース12にも分散される。そのため、複数のティース12で荷重を受けることができ、コイル4の巻き付けによる第1ティース部12Aの位置ずれを抑制する効果を高めることができる。
図25は、実施の形態3のインシュレータ複合体2Aを、一体型のステータコア10に取り付けた例を示す図である。図25に示すステータコア10は、図1に示した分割面部15を有さない点で、図1に示したステータコア10と異なる。すなわち、このステータコア10は、環状に打ち抜かれた電磁鋼板を軸方向に積層したものである。
図25に示した例では、3つのインシュレータ2が一体化されて、1つのインシュレータ複合体2Aを構成している。ステータコア10は9つのティース12を有するため、3つのインシュレータ複合体2Aがステータコア10に取り付けられる。なお、ティース12の数は、9つに限定されるものではない。また、インシュレータ複合体2Aは、少なくとも2つのインシュレータ2が一体化されていればよい。
ステータ1を組み立てる際には、環状に打ち抜いた積層鋼板を積層して、第1コア部10Aおよび第2コア部10B(図8)からなるステータコア10を形成する。そして、樹脂成形体である3つのインシュレータ複合体2Aを、ステータコア10に取り付ける。その後、インシュレータ複合体2Aおよび絶縁フィルム3(図6(C))を介して、各ティース12にコイル4を巻き付ける。
以上説明したように、実施の形態3では、隣接する複数のインシュレータ2が一体化してインシュレータ複合体2Aを構成するため、コイル4の巻き付けによって1つのティース12に作用する荷重が他のティース12にも分散される。そのため、第1ティース部12Aの位置ずれを抑制する効果を高めることができる。
変形例.
図26は、実施の形態3の変形例のインシュレータ複合体2Bと分割コア9とを示す図である。上述した図24では、インシュレータ複合体2Aの全てのインシュレータ2が突起部27を有していた。これに対し、この変形例では、インシュレータ複合体2Bの1つのインシュレータ2のみが突起部27を有する。穴部17および突起部27の断面形状は、ここでは円形であるが、実施の形態1の穴部16および突起部26のように半円形であってもよい。
図26は、実施の形態3の変形例のインシュレータ複合体2Bと分割コア9とを示す図である。上述した図24では、インシュレータ複合体2Aの全てのインシュレータ2が突起部27を有していた。これに対し、この変形例では、インシュレータ複合体2Bの1つのインシュレータ2のみが突起部27を有する。穴部17および突起部27の断面形状は、ここでは円形であるが、実施の形態1の穴部16および突起部26のように半円形であってもよい。
インシュレータ複合体2Bを構成する複数のインシュレータ2の1つが突起部27を有し、この突起部27が穴部17に圧入されていれば、ステータコア10の第1コア部10Aを第2コア部10B(図8)に固定し、第1ティース部12Aの位置ずれを抑制することができる。
例えば、図26に示した例では、インシュレータ複合体2Bの2つのインシュレータ2のうち、1つのインシュレータ2のみが突起部27を有する。また、インシュレータ複合体2Bが取り付けられる2つの分割コア9のうち、1つの分割コア9のみが穴部17を有する。この場合、インシュレータ複合体2Bの全てのインシュレータ2が突起部27を有する場合と比較して、インシュレータ複合体2Bを構成する樹脂が少なくて済む。
図27は、実施の形態3の変形例のインシュレータ複合体2Bを、一体型のステータコア10に取り付けた例を示す図である。図27に示すステータコア10は、図25に示した一体型のステータコア10と同様の構成を有する。
図27に示した例では、インシュレータ複合体2Bが3つのインシュレータ2を有する。ステータコア10は9つのティース12を有するため、ステータコア10には3つのインシュレータ複合体2Bが取り付けられる。なお、ティース12の数は、9つに限定されるものではない。また、インシュレータ複合体2Bは、少なくとも2つのインシュレータ2を有していればよい。
この変形例においても、隣接する複数のインシュレータ2が一体化してインシュレータ複合体2Bを構成するため、コイル4の巻き付けによって1つのティース12に作用する荷重が他のティース12にも分散される。そのため、第1ティース部12Aの位置ずれを抑制する効果を高めることができる。また、インシュレータ複合体2Bの1つのインシュレータ2のみが突起部27を有するため、全てのインシュレータ2が突起部27を有する場合と比較して、インシュレータ複合体2Bを構成する樹脂が少なくて済む。
なお、図26および図27では、インシュレータ複合体2Bの1つのインシュレータ2のみに突起部27を設けたが、インシュレータ複合体2Bを構成する一部のインシュレータ2が突起部27を有していればよい。
実施の形態4.
図28は、実施の形態4のインシュレータ複合体2Cと一体型のステータコア10とを示す図である。実施の形態4では、ステータコア10に取り付けられる全てのインシュレータ2が環状に一体化され、インシュレータ複合体2Cを構成している。
図28は、実施の形態4のインシュレータ複合体2Cと一体型のステータコア10とを示す図である。実施の形態4では、ステータコア10に取り付けられる全てのインシュレータ2が環状に一体化され、インシュレータ複合体2Cを構成している。
ここでは、ステータコア10は9つのティース12を有し、9つのインシュレータ2が環状に一体化されている。なお、ティース12の数およびインシュレータ2の数は、9に限らず、2以上であればよい。
インシュレータ複合体2Cの全てのインシュレータ2は、突起部27を有する。各突起部27は、ステータコア10のヨーク11に形成された穴部17に圧入される。穴部17および突起部27の断面形状は、ここでは円形であるが、実施の形態1の穴部16および突起部26のように半円形であってもよい。
ステータ1を組み立てる際には、環状に打ち抜いた積層鋼板を積層して、第1コア部10Aおよび第2コア部10B(図8)からなるステータコア10を形成する。そして、樹脂成形体であるインシュレータ複合体2Aを、ステータコア10に取り付ける。その後、インシュレータ2および絶縁フィルム3(図6(C))を介して、各ティース12にコイル4を巻き付ける。
この実施の形態4では、インシュレータ複合体2Cの全てのインシュレータ2が環状に一体化されているため、第1コア部10Aを第2コア部10B(図8)に強固に固定して第1ティース部12Aの位置ずれを抑制する作用効果が最大となる。
変形例.
図29は、実施の形態4の変形例のインシュレータ複合体2Dと一体型のステータコア10とを示す図である。上述した図28では、インシュレータ複合体2Cの全てのインシュレータ2が突起部27を有していた。これに対し、この変形例では、インシュレータ複合体2Dの1つのインシュレータ2のみが突起部27を有する。穴部17および突起部27の断面形状は、ここでは円形であるが、実施の形態1の穴部16および突起部26のように半円形であってもよい。
図29は、実施の形態4の変形例のインシュレータ複合体2Dと一体型のステータコア10とを示す図である。上述した図28では、インシュレータ複合体2Cの全てのインシュレータ2が突起部27を有していた。これに対し、この変形例では、インシュレータ複合体2Dの1つのインシュレータ2のみが突起部27を有する。穴部17および突起部27の断面形状は、ここでは円形であるが、実施の形態1の穴部16および突起部26のように半円形であってもよい。
ここでは、ステータコア10は9つのティース12を有し、9つのインシュレータ2が環状に一体化されている。また、インシュレータ複合体2Dを構成する9つのインシュレータ2のうちの1つのみが、突起部27を有する。この場合、インシュレータ複合体2Dの全てのインシュレータ2が突起部27を有する場合と比較して、インシュレータ複合体2Dを構成する樹脂が少なくて済む。なお、ティース12の数およびインシュレータ2の数は、9に限らず、2以上であればよい。
この変形例においても、全てのインシュレータ2が環状に一体化されているため、第1コア部10Aを第2コア部10B(図8)に強固に固定して第1ティース部12Aの位置ずれを抑制する作用効果が高くなる。また、インシュレータ複合体2Dの1つのインシュレータ2のみが突起部27を有するため、全てのインシュレータ2が突起部27を有する場合と比較して、インシュレータ複合体2Dを構成する樹脂が少なくて済む。
なお、図29では、インシュレータ複合体2Dの1つのインシュレータ2のみに突起部27を設けたが、インシュレータ複合体2Dを構成する一部のインシュレータ2が突起部27を有していればよい。
実施の形態5.
図30(A),(B)は、実施の形態5のインシュレータ複合体2E,2Fを、分割コア9と共に示す図である。上述した実施の形態3および4では、周方向に隣接する複数の分割コア9に設けられるインシュレータ2が一体化していた。これに対し、この実施の形態5では、周方向に離れた分割コア9に設けられるインシュレータ2が一体化し、インシュレータ複合体2E(2F)を構成している。
図30(A),(B)は、実施の形態5のインシュレータ複合体2E,2Fを、分割コア9と共に示す図である。上述した実施の形態3および4では、周方向に隣接する複数の分割コア9に設けられるインシュレータ2が一体化していた。これに対し、この実施の形態5では、周方向に離れた分割コア9に設けられるインシュレータ2が一体化し、インシュレータ複合体2E(2F)を構成している。
ここでは、図30(A)に示すインシュレータ複合体2Eと、図30(B)に示すインシュレータ複合体2Fとが、9つの分割コア9からなるステータコア10に取り付けられる。
図30(A)に示すインシュレータ複合体2E(第1インシュレータ複合体とも称する)は、周方向に間隔を開けて配置された4つのインシュレータ2と、これらを連結するリング状のブリッジ部201とを有する。このインシュレータ複合体2Eは、PBT等の樹脂で一体に成形されている。
インシュレータ複合体2Eのブリッジ部201は、各インシュレータ2のフランジ部21の先端(すなわち径方向の内側端部)に接続されている。4つのインシュレータ2は、インシュレータ2の2つ分の間隔を開けた1箇所(図中下側)を除き、インシュレータ2の1つ分の間隔を開けて配置されている。
インシュレータ複合体2Eの各インシュレータ2には、分割コア9が取り付けられる。各インシュレータ2は突起部27を有し、この突起部27は、分割コア9のヨーク11の穴部17に圧入される。各インシュレータ2に分割コア9を取り付けた状態で、上述した絶縁フィルム3(図6(C))を介して、ティース12にコイル4が巻き付けられる。周方向に隣り合うインシュレータ2の間に広いスペースが確保されるため、コイル4の巻き付けを容易に行うことができる。
図30(B)に示すインシュレータ複合体2F(第2インシュレータ複合体とも称する)は、周方向に間隔を開けて配置された5つのインシュレータ2と、これらを連結するリング状のブリッジ部202とを有する。このインシュレータ複合体2Fは、PBT等の樹脂で一体に成形されている。
インシュレータ複合体2Fのブリッジ部202は、各インシュレータ2のフランジ部21の先端(すなわち径方向の内側端部)に接続されている。5つのインシュレータ2のうち、図中下側の2つのインシュレータ2は互いに一体に構成されている。この1箇所(図中下側)を除き、5つのインシュレータ2は、インシュレータ2の1つ分の間隔を開けて配置されている。
インシュレータ複合体2Fの各インシュレータ2には、分割コア9が取り付けられる。各インシュレータ2は突起部27を有し、この突起部27は、分割コア9のヨーク11の穴部17に圧入される。各インシュレータ2に分割コア9を取り付けた状態で、上述した絶縁フィルム3(図6(C))を介して、ティース12にコイル4が巻き付けられる。周方向に隣り合うインシュレータ2の間に広いスペースが確保されるため、コイル4の巻き付けを容易に行うことができる。
図31(A)は、インシュレータ複合体2Eの一部を径方向内側から見た図であり、図31(B)は、インシュレータ複合体2Fの一部を径方向内側から見た図である。図31(C)は、インシュレータ複合体2E,2Fを組み合わせた状態を径方向内側から見た図である。
図31(A)に示すように、インシュレータ複合体2Eのブリッジ部201は、分割コア9の軸方向の一方の側(図中下側)のインシュレータ2のフランジ部21に接続されている。なお、分割コア9の軸方向の他方の側(図中上側)では、インシュレータ2同士は互いに離れており、分割コア9の軸方向端部に嵌合することで取り付けられている。
図31(B)に示すように、インシュレータ複合体2Fのブリッジ部202は、分割コア9の軸方向の一方の側(図中下側)のインシュレータ2のフランジ部21に、台座部203を介して接続されている。なお、分割コア9の軸方向の他方の側(図中上側)では、インシュレータ2同士は互いに離れており、分割コア9の軸方向端部に嵌合することで取り付けられている。
インシュレータ複合体2E,2Fのブリッジ部201,202は、ブリッジ部202の台座部203の分だけ、軸方向に互いにずれた位置にある。
ステータ1を組み立てる際には、積層鋼板を積層して、第1コア部10Aおよび第2コア部10B(図8)からなる分割コア9を形成する。そして、インシュレータ複合体2E,2Fのそれぞれに分割コア9に取り付ける。その後、インシュレータ複合体2E,2Fの各インシュレータ2および絶縁フィルム3(図6(C))を介して、各分割コア9のティース12にコイル4を巻き付ける。そして、インシュレータ複合体2E,2Fを、図31(C)に示すように組み合わせる。
図31(C)に示すように、インシュレータ複合体2E,2Fを組み合わせると、インシュレータ複合体2Eの隣り合う2つのインシュレータ2(および分割コア9)の間に、インシュレータ複合体2Fのインシュレータ2(および分割コア9)が配置される。また、インシュレータ複合体2Fの隣り合う2つのインシュレータ2(および分割コア9)の間に、インシュレータ複合体2Eのインシュレータ2(および分割コア9)が配置される。
インシュレータ複合体2Fの台座部203は、インシュレータ複合体2Eのブリッジ部202よりも径方向外側に位置している。また、上記の通り、インシュレータ複合体2E,2Fのブリッジ部201,202は、ブリッジ部202の台座部203の分だけ、互いに軸方向にずれた位置にある。そのため、ブリッジ部201,202が互いに干渉することはない。このようにインシュレータ複合体2E,2Fを組み合わせたのち、各分割コア90を互いに溶接等により固定する。これにより、ステータ1が完成する。
ここでは、ブリッジ部201,202が、ステータコア10(分割コア9)に対して、軸方向の互いに同じ側に設けられていたが、以下で説明するように、ブリッジ部201,202を軸方向において互いに反対側に設けてもよい。
図32(A)は、インシュレータ複合体2Eの一部を径方向内側から見た図であり、図32(B)は、インシュレータ複合体2Fの一部を径方向内側から見た図である。図32(C)は、インシュレータ複合体2E,2Fを組み合わせた状態を径方向内側から見た図である。
図32(A)に示すように、インシュレータ複合体2Eのブリッジ部201は、分割コア9の軸方向の一方の側(図中下側)のインシュレータ2のフランジ部21に、台座部204を介して接続されている。
図32(B)に示すように、インシュレータ複合体2Fのブリッジ部202は、分割コア9の軸方向の他方の側(図中上側)のインシュレータ2のフランジ部21に、台座部205を介して接続されている。
図32(C)に示すように、インシュレータ複合体2E,2Fを組み合わせると、ブリッジ部201,202が軸方向における互いに反対側に位置するため、ブリッジ部201,202が互いに干渉することはない。
以上説明したように、実施の形態5では、複数のインシュレータ2がブリッジ部201,202を介して連結されて、インシュレータ複合体2E,2Fを構成する。そのため、各インシュレータ複合体2E,2Fとそれに取り付けられた分割コア9とを、それぞれ1つのユニットとして取り扱うことができる。そのため、ステータ1の組立工程が簡単になる。
ここでは、ブリッジ部201,202を有する2つのインシュレータ複合体2E,2Fを組み合わせる構成について説明したが、3つ以上のインシュレータ複合体を組み合わせてもよい。すなわち、3つ以上のブリッジ部を用いてもよい。
変形例.
図33(A),(B)は、実施の形態5の変形例のインシュレータ複合体2G,2Hを、分割コア9と共に示す図である。図30~32に示したインシュレータ複合体2E,2Fは、インシュレータ2の径方向内側をブリッジ部201,202で連結していた。これに対し、変形例のインシュレータ複合体2G,2Hでは、インシュレータ2の径方向外側をブリッジ部210,212で連結している。
図33(A),(B)は、実施の形態5の変形例のインシュレータ複合体2G,2Hを、分割コア9と共に示す図である。図30~32に示したインシュレータ複合体2E,2Fは、インシュレータ2の径方向内側をブリッジ部201,202で連結していた。これに対し、変形例のインシュレータ複合体2G,2Hでは、インシュレータ2の径方向外側をブリッジ部210,212で連結している。
図33(A)に示すインシュレータ複合体2Gは、周方向に間隔を開けて配置された4つのインシュレータ2と、これらを連結するリング状のブリッジ部210とを有する。ブリッジ部210は、各インシュレータ2の壁部25から径方向外側に突出する突出部211に接続されている。インシュレータ2の配置は、図30(A)に示したインシュレータ2の配置と同様である。
インシュレータ複合体2Gの各インシュレータ2には、分割コア9が取り付けられる。各インシュレータ2は突起部27を有し、この突起部27は、分割コア9のヨーク11の穴部17に圧入される。
図33(B)に示すインシュレータ複合体2Hは、周方向に間隔を開けて配置された5つのインシュレータ2と、これらを連結するリング状のブリッジ部212とを有する。ブリッジ部212は、各インシュレータ2の壁部25から径方向外側に突出する突出部213に接続されている。インシュレータ2の配置は、図30(B)に示したインシュレータ2の配置と同様である。
インシュレータ複合体2Hの各インシュレータ2には、分割コア9が取り付けられる。各インシュレータ2は突起部27を有し、この突起部27は、分割コア9のヨーク11の穴部17に圧入される。
インシュレータ複合体2G,2Hのブリッジ部210,212は、図31(A)~(C)に示したように軸方向の同じ側に設けられていても良く、図32(A)~(C)に示したように軸方向の反対側に設けられていても良い。いずれの場合も、ブリッジ部210,212を干渉させないように、インシュレータ複合体2G,2Hを組み合わせることができる。
この変形例においても、複数のインシュレータ2がブリッジ部210,212を介して連結されて、インシュレータ複合体2G,2Hを構成する。そのため、各インシュレータ複合体2G,2Hとそれに取り付けられた分割コア9とを、それぞれ1つのユニットとして取り扱うことができる。そのため、ステータ1の組立工程が簡単になる。
ここでは、ブリッジ部210,212を有する2つのインシュレータ複合体2G,2Hを組み合わせる構成について説明したが、3つ以上のインシュレータ複合体を組み合わせてもよい。すなわち、3つ以上のブリッジ部を用いてもよい。
<ロータリ圧縮機>
次に、上述した各実施の形態の電動機が適用可能なロータリ圧縮機300について説明する。図34は、ロータリ圧縮機300を示す断面図である。ロータリ圧縮機300は、フレーム(密閉容器)301と、フレーム301内に配設された圧縮機構310と、圧縮機構310を駆動する電動機100とを備える。
次に、上述した各実施の形態の電動機が適用可能なロータリ圧縮機300について説明する。図34は、ロータリ圧縮機300を示す断面図である。ロータリ圧縮機300は、フレーム(密閉容器)301と、フレーム301内に配設された圧縮機構310と、圧縮機構310を駆動する電動機100とを備える。
圧縮機構310は、シリンダ室312を有するシリンダ311と、電動機100のシャフト58に固定されたローリングピストン314と、シリンダ室312内を吸入側と圧縮側に分けるベーン(図示せず)と、シャフト58が挿入されてシリンダ室312の軸方向端面を閉鎖する上部フレーム316および下部フレーム317とを有する。上部フレーム316および下部フレーム317には、上部吐出マフラ318および下部吐出マフラ319がそれぞれ装着されている。
フレーム301は、例えば厚さ3mmの鋼板を絞り加工して形成された円筒形状の容器である。フレーム301の底部には、圧縮機構310の各摺動部を潤滑する冷凍機油(図示せず)が貯留されている。シャフト58は、上部フレーム316および下部フレーム317によって回転可能に保持されている。
シリンダ311は、内部にシリンダ室312を備えている。ローリングピストン314は、シリンダ室312内で偏心回転する。シャフト58は偏心軸部を有し、その偏心軸部にローリングピストン314が嵌合している。
電動機100のステータコア10は、焼き嵌めによりフレーム301の内側に取り付けられている。ステータコア10に巻回されたコイル4には、フレーム301に固定されたガラス端子305から電力が供給される。ロータ5のシャフト孔55(図1)には、シャフト58が固定されている。
フレーム301の外部には、冷媒ガスを貯蔵するアキュムレータ302が取り付けられている。フレーム301には吸入パイプ303が固定され、この吸入パイプ303を介してアキュムレータ302からシリンダ311に冷媒ガスが供給される。また、フレーム301の上部には、冷媒を外部に吐出する吐出パイプ307が設けられている。
冷媒としては、例えば、R410A、R407CまたはR22等を用いることができる。また、地球温暖化防止の観点からは、低GWP(地球温暖化係数)の冷媒を用いることが望ましい。低GWPの冷媒としては、例えば、以下の冷媒を用いることができる。
(1)まず、組成中に炭素の二重結合を有するハロゲン化炭化水素、例えばHFO(Hydro-Fluoro-Orefin)-1234yf(CF3CF=CH2)を用いることができる。HFO-1234yfのGWPは4である。
(2)また、組成中に炭素の二重結合を有する炭化水素、例えばR1270(プロピレン)を用いてもよい。R1270のGWPは3であり、HFO-1234yfより低いが、可燃性はHFO-1234yfより高い。
(3)また、組成中に炭素の二重結合を有するハロゲン化炭化水素または組成中に炭素の二重結合を有する炭化水素の少なくともいずれかを含む混合物、例えばHFO-1234yfとR32との混合物を用いてもよい。上述したHFO-1234yfは低圧冷媒のため圧損が大きくなる傾向があり、冷凍サイクル(特に蒸発器)の性能低下を招く可能性がある。そのため、HFO-1234yfよりも高圧冷媒であるR32またはR41との混合物を用いることが実用上は望ましい。
(2)また、組成中に炭素の二重結合を有する炭化水素、例えばR1270(プロピレン)を用いてもよい。R1270のGWPは3であり、HFO-1234yfより低いが、可燃性はHFO-1234yfより高い。
(3)また、組成中に炭素の二重結合を有するハロゲン化炭化水素または組成中に炭素の二重結合を有する炭化水素の少なくともいずれかを含む混合物、例えばHFO-1234yfとR32との混合物を用いてもよい。上述したHFO-1234yfは低圧冷媒のため圧損が大きくなる傾向があり、冷凍サイクル(特に蒸発器)の性能低下を招く可能性がある。そのため、HFO-1234yfよりも高圧冷媒であるR32またはR41との混合物を用いることが実用上は望ましい。
ロータリ圧縮機300の動作は、以下の通りである。アキュムレータ302から供給された冷媒ガスは、吸入パイプ303を通ってシリンダ311のシリンダ室312内に供給される。電動機100が駆動されてロータ5が回転すると、ロータ5と共にシャフト58が回転する。そして、シャフト58に嵌合するローリングピストン314がシリンダ室312内で偏心回転し、シリンダ室312内で冷媒が圧縮される。圧縮された冷媒は、吐出マフラ318,319を通り、さらに電動機100に設けられた穴(図示せず)を通ってフレーム301内を上昇し、吐出パイプ307から吐出される。
上述した各実施の形態で説明した電動機は、第1ティース部12Aの位置ずれの抑制により、良好な制御性と振動特性を有する。そのため、圧縮機300の駆動源に各実施の形態で説明した電動機を用いることで、圧縮機300の運転効率を向上することができる。
<空気調和装置>
次に、図34に示した圧縮機300を備えた空気調和装置400について説明する。図35は、空気調和装置400を示す図である。図35に示した空気調和装置400は、圧縮機401と、凝縮器402と、絞り装置(減圧装置)403と、蒸発器404とを備えている。圧縮機401、凝縮器402、絞り装置403および蒸発器404は、冷媒配管407によって連結され、冷凍サイクルを構成している。すなわち、圧縮機401、凝縮器402、絞り装置403および蒸発器404の順に、冷媒が循環する。
次に、図34に示した圧縮機300を備えた空気調和装置400について説明する。図35は、空気調和装置400を示す図である。図35に示した空気調和装置400は、圧縮機401と、凝縮器402と、絞り装置(減圧装置)403と、蒸発器404とを備えている。圧縮機401、凝縮器402、絞り装置403および蒸発器404は、冷媒配管407によって連結され、冷凍サイクルを構成している。すなわち、圧縮機401、凝縮器402、絞り装置403および蒸発器404の順に、冷媒が循環する。
圧縮機401、凝縮器402および絞り装置403は、室外機410に設けられている。圧縮機401は、図34に示したロータリ圧縮機300で構成されている。室外機410には、凝縮器402に室外の空気を供給する室外側送風機405が設けられている。蒸発器404は、室内機420に設けられている。この室内機420には、蒸発器404に室内の空気を供給する室内側送風機406が設けられている。
空気調和装置400の動作は、次の通りである。圧縮機401は、吸入した冷媒を圧縮して送り出す。凝縮器402は、圧縮機401から流入した冷媒と室外の空気との熱交換を行い、冷媒を凝縮して液化させて冷媒配管407に送り出す。室外側送風機405は、凝縮器402に室外の空気を供給する。絞り装置403は、開度を変化させることによって、冷媒配管407を流れる冷媒の圧力等を調整する。
蒸発器404は、絞り装置403により低圧状態にされた冷媒と室内の空気との熱交換を行い、冷媒に空気の熱を奪わせて蒸発(気化)させて、冷媒配管407に送り出す。室内側送風機406は、蒸発器404に室内の空気を供給する。これにより、蒸発器404で熱が奪われた冷風が、室内に供給される。
空気調和装置400は、各実施の形態で説明した電動機の適用により運転効率を向上した圧縮機401を用いている。そのため、空気調和装置400の運転効率を向上することができる。
以上、本発明の望ましい実施の形態について具体的に説明したが、本発明は上記の実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において、各種の改良または変形を行なうことができる。
1 ステータ、 2 インシュレータ、 2A、2B,2C,2D,2E,2F,2G,2H インシュレータ複合体、 3 絶縁フィルム、 4 コイル、 5 ロータ、 6 密閉容器、 9,9A,9B 分割コア、 10 ステータコア、 10A 第1コア部、 10B 第2コア部、 11 ヨーク、 11A 第1ヨーク部、 11B 第2ヨーク部、 12 ティース、 12A 第1ティース部、 12B 第2ティース部、 13 歯先部、 13A 第1歯先部、 13B 第2歯先部、 14 スロット、 15 分割面部、 16,17 穴部、 18 カシメ部、 19 凹部、 20 胴部、 21 フランジ部、 25 壁部、 26,27 突起部、 50 ロータコア、 51 磁石挿入孔、 52 フラックスバリア、 53 永久磁石、 55 シャフト孔、 58 シャフト、 100 電動機、 110 外周面、 111A,111B 内周面、 112 凹部、 121A,121B 側面、 125 段差部、 130 先端面、 131A,131B 外周面、 200 インシュレータ、 201,202,210,212 ブリッジ部、 203,204,205 台座部、 211,213 突出部、 300 ロータリ圧縮機(圧縮機)、 301 フレーム、 310 圧縮機構、 400 空気調和装置、 401 圧縮機、 402 凝縮器、 403 絞り装置、 404 蒸発器、 410 室外機、 420 室内機。
Claims (25)
- 中心軸を中心とする周方向に延在するヨークと、前記ヨークから前記中心軸に向かって延在するティースと、前記ティースに前記周方向に隣接するスロットとを有するステータコアと、
前記ティースに巻き付けられ、前記スロットに収容されたコイルと
を有し、
前記ステータコアは、前記中心軸の軸方向の端部に位置する第1コア部と、前記軸方向の中央部に位置する第2コア部とを有し、
前記第1コア部における前記スロットの面積は、前記第2コア部における前記スロットの面積よりも大きく、
前記第1コア部には、前記ティースと前記コイルとの間に位置するインシュレータが設けられ、
前記ステータコアは、前記第1コア部を貫通して前記第2コア部に達する穴部を有し、
前記インシュレータは、前記穴部に前記第2コア部の位置まで挿入される突起部を有する
ステータ。 - 前記ステータコアの前記第1コア部における前記ティースの前記周方向の幅は、前記第2コア部における前記ティースの前記周方向の幅よりも狭い
請求項1に記載のステータ。 - 前記ステータコアは、複数の積層鋼板を積層した構成を有し、
前記ステータコアの前記ヨークおよび前記ティースのうち、前記ヨークのみに、前記複数の積層鋼板を一体に固定する固定部を有する
請求項1または2に記載のステータ。 - 前記穴部は、前記固定部を通過して前記ティースの幅方向に延在する直線と重なるように設けられている
請求項3に記載のステータ。 - 前記固定部を含む複数の固定部を有し、
前記穴部は、前記複数の固定部を結ぶ直線と重なるように設けられている
請求項3または4に記載のステータ。 - 前記穴部は、前記周方向における前記ティースの中心と前記中心軸とを通る直線に対して、対称に形成されている
請求項1から5までの何れか1項に記載のステータ。 - 前記第1コア部と前記第2コア部との間に、前記スロットに面する段差部が形成され、
前記段差部に前記インシュレータが嵌合する
請求項1から6までの何れか1項に記載のステータ。 - 前記段差部は、前記周方向における前記ティースの中心と前記中心軸とを通る直線に対して、対称に形成されている
請求項7に記載のステータ。 - 前記穴部は、前記第2コア部を前記軸方向に貫通している
請求項1から8までの何れか1項に記載のステータ。 - 前記突起部は、前記穴部を貫通するように挿入されている
請求項9に記載のステータ。 - 前記ステータコアは、前記ティースを含み前記周方向に配列された複数のティースを有し、
前記インシュレータを含む、前記複数のティースと同数の複数のインシュレータが設けられ、
前記複数のインシュレータのうち、少なくとも2つのインシュレータが一体に構成されている
請求項1から10までの何れか1項に記載のステータ。 - 前記複数のインシュレータのうち、前記周方向に隣接する少なくとも2つのインシュレータが一体に構成されている
請求項11に記載のステータ。 - 前記少なくとも2つのインシュレータのうち、1つのインシュレータのみが前記突起部を有する
請求項12に記載のステータ。 - 前記複数のインシュレータの全てが一体に構成されている
請求項11に記載のステータ。 - 前記複数のインシュレータのうち、1つのインシュレータのみが前記突起部を有する
請求項14に記載のステータ。 - 前記複数のインシュレータのうち、少なくとも2つのインシュレータがブリッジ部を介して連結されている
請求項11に記載のステータ。 - 複数のインシュレータ複合体を有し、
前記複数のインシュレータ複合体は、いずれも、2つ以上のインシュレータがブリッジ部を介して連結されたものである
請求項11に記載のステータ。 - 前記複数のインシュレータ複合体のそれぞれのブリッジ部は、前記中心軸を中心とする径方向において前記ステータコアの内側または外側に位置する
請求項17に記載のステータ。 - 前記複数のインシュレータ複合体のそれぞれのブリッジ部は、前記軸方向において、前記ステータコアに対して互いに同じ側または互いに反対の側に位置する
請求項17または18に記載のステータ。 - 前記ステータコアは、複数の分割コアが、前記中心軸を中心とする環状に連結された構成を有する
請求項11から19までの何れか1項に記載のステータ。 - 前記ステータコアは、前記中心軸を中心とする環状に一体に形成されている
請求項11から19までの何れか1項に記載のステータ。 - 前記ステータコアは、容器の内周面に嵌合する外周面を有する
請求項1から21までの何れか1項に記載のステータ。 - 請求項1から22までの何れか1項に記載のステータと、
前記ステータに囲まれ、前記中心軸を中心として回転可能なロータと
を備えた電動機。 - 請求項23に記載の電動機と、前記電動機によって駆動される圧縮機構とを備えた圧縮機。
- 圧縮機、凝縮器、減圧装置および蒸発器を備え、
前記圧縮機は、請求項23に記載の電動機と、前記電動機によって駆動される圧縮機構とを備えた
空気調和装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2018/028231 WO2020021702A1 (ja) | 2018-07-27 | 2018-07-27 | ステータ、電動機、圧縮機および空気調和装置 |
| JP2020532108A JP7038827B2 (ja) | 2018-07-27 | 2018-07-27 | ステータ、電動機、圧縮機および空気調和装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2018/028231 WO2020021702A1 (ja) | 2018-07-27 | 2018-07-27 | ステータ、電動機、圧縮機および空気調和装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020021702A1 true WO2020021702A1 (ja) | 2020-01-30 |
Family
ID=69181445
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/028231 WO2020021702A1 (ja) | 2018-07-27 | 2018-07-27 | ステータ、電動機、圧縮機および空気調和装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7038827B2 (ja) |
| WO (1) | WO2020021702A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022259453A1 (ja) * | 2021-06-10 | 2022-12-15 | 三菱電機株式会社 | 電動機、送風機および空気調和装置 |
| WO2023233629A1 (ja) * | 2022-06-02 | 2023-12-07 | 三菱電機株式会社 | ステータ、電動機、圧縮機および冷凍サイクル装置 |
| JP7471493B2 (ja) | 2020-06-24 | 2024-04-19 | 三菱電機株式会社 | 固定子、電動機、圧縮機、冷凍サイクル装置及び空気調和装置 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07288941A (ja) * | 1994-04-12 | 1995-10-31 | Mitsubishi Electric Corp | 電動機 |
| JPH0851746A (ja) * | 1994-08-05 | 1996-02-20 | Sanwa Chem Kk | モールドモーター |
| JP2000224793A (ja) * | 1999-02-02 | 2000-08-11 | Sawafuji Electric Co Ltd | アウタロータ型多極発電機用ステータにおける絶縁構造 |
| JP2007202326A (ja) * | 2006-01-27 | 2007-08-09 | Matsushita Electric Ind Co Ltd | モータ |
| JP2009038947A (ja) * | 2007-08-03 | 2009-02-19 | Nidec Shibaura Corp | インシュレータ、モータ用ステータ及びこれを備えたモータ |
| JP2016073138A (ja) * | 2014-10-01 | 2016-05-09 | 日立アプライアンス株式会社 | 永久磁石式回転電機および洗濯機 |
| JP2016208790A (ja) * | 2015-04-28 | 2016-12-08 | 日本電産株式会社 | モータおよび遠心送風機 |
| JP2017103850A (ja) * | 2015-11-30 | 2017-06-08 | 三菱電機株式会社 | 回転電機 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6537623B2 (ja) | 2015-11-04 | 2019-07-03 | 三菱電機株式会社 | ステータ、電動機、圧縮機、及び冷凍空調装置 |
-
2018
- 2018-07-27 JP JP2020532108A patent/JP7038827B2/ja active Active
- 2018-07-27 WO PCT/JP2018/028231 patent/WO2020021702A1/ja active Application Filing
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07288941A (ja) * | 1994-04-12 | 1995-10-31 | Mitsubishi Electric Corp | 電動機 |
| JPH0851746A (ja) * | 1994-08-05 | 1996-02-20 | Sanwa Chem Kk | モールドモーター |
| JP2000224793A (ja) * | 1999-02-02 | 2000-08-11 | Sawafuji Electric Co Ltd | アウタロータ型多極発電機用ステータにおける絶縁構造 |
| JP2007202326A (ja) * | 2006-01-27 | 2007-08-09 | Matsushita Electric Ind Co Ltd | モータ |
| JP2009038947A (ja) * | 2007-08-03 | 2009-02-19 | Nidec Shibaura Corp | インシュレータ、モータ用ステータ及びこれを備えたモータ |
| JP2016073138A (ja) * | 2014-10-01 | 2016-05-09 | 日立アプライアンス株式会社 | 永久磁石式回転電機および洗濯機 |
| JP2016208790A (ja) * | 2015-04-28 | 2016-12-08 | 日本電産株式会社 | モータおよび遠心送風機 |
| JP2017103850A (ja) * | 2015-11-30 | 2017-06-08 | 三菱電機株式会社 | 回転電機 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7471493B2 (ja) | 2020-06-24 | 2024-04-19 | 三菱電機株式会社 | 固定子、電動機、圧縮機、冷凍サイクル装置及び空気調和装置 |
| WO2022259453A1 (ja) * | 2021-06-10 | 2022-12-15 | 三菱電機株式会社 | 電動機、送風機および空気調和装置 |
| WO2023233629A1 (ja) * | 2022-06-02 | 2023-12-07 | 三菱電機株式会社 | ステータ、電動機、圧縮機および冷凍サイクル装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7038827B2 (ja) | 2022-03-18 |
| JPWO2020021702A1 (ja) | 2021-01-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6537623B2 (ja) | ステータ、電動機、圧縮機、及び冷凍空調装置 | |
| CN108352737B (zh) | 电动机、转子、压缩机以及制冷空调装置 | |
| JP6636144B2 (ja) | 固定子、電動機、圧縮機、および冷凍空調装置 | |
| JP7003267B2 (ja) | 電動機、圧縮機および空気調和装置 | |
| JP6053910B2 (ja) | 永久磁石埋込型電動機、圧縮機、および冷凍空調装置 | |
| US10020699B2 (en) | Embedded permanent magnet type electric motor, compressor, and refrigeration air-conditioning device | |
| JPWO2018138864A1 (ja) | 固定子、電動機、圧縮機、および冷凍空調装置 | |
| US9634531B2 (en) | Electric motor with embedded permanent magnet, compressor, and refrigeration/air-conditioning device | |
| WO2016056065A1 (ja) | 永久磁石埋込型電動機、圧縮機、および冷凍空調機 | |
| JP6824333B2 (ja) | 電動機、ロータ、圧縮機および冷凍空調装置 | |
| WO2020021702A1 (ja) | ステータ、電動機、圧縮機および空気調和装置 | |
| JP6656429B2 (ja) | 固定子、電動機、圧縮機、および冷凍空調装置 | |
| WO2017208291A1 (ja) | 固定子、電動機、圧縮機、及び冷凍空調装置 | |
| JP7105999B2 (ja) | 電動機、圧縮機、空気調和装置および電動機の製造方法 | |
| WO2022208740A1 (ja) | モータ、圧縮機および冷凍サイクル装置 | |
| JP7433420B2 (ja) | ロータ、モータ、圧縮機および空気調和装置 | |
| WO2021214824A1 (ja) | ロータ、モータ、圧縮機、空気調和装置およびロータの製造方法 | |
| JP7154373B2 (ja) | 電動機、圧縮機、及び空気調和機 | |
| JP7130131B2 (ja) | 着磁用リング、着磁方法、着磁装置、ロータ、電動機、圧縮機および空気調和装置 | |
| WO2023233629A1 (ja) | ステータ、電動機、圧縮機および冷凍サイクル装置 | |
| WO2024157305A1 (ja) | ステータ、電動機、圧縮機および冷凍サイクル装置 | |
| WO2023248466A1 (ja) | ステータ、電動機、圧縮機、冷凍サイクル装置および電動機の製造方法 | |
| JP7026811B2 (ja) | ステータ、電動機、圧縮機および空気調和装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18927689 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2020532108 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18927689 Country of ref document: EP Kind code of ref document: A1 |