WO2020008750A1 - 画像表示装置および光学機器 - Google Patents
画像表示装置および光学機器 Download PDFInfo
- Publication number
- WO2020008750A1 WO2020008750A1 PCT/JP2019/020353 JP2019020353W WO2020008750A1 WO 2020008750 A1 WO2020008750 A1 WO 2020008750A1 JP 2019020353 W JP2019020353 W JP 2019020353W WO 2020008750 A1 WO2020008750 A1 WO 2020008750A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- unit
- optical
- light
- circuit
- optical system
- Prior art date
Links
- 230000003287 optical effect Effects 0.000 title claims abstract description 114
- 238000001514 detection method Methods 0.000 claims description 82
- 230000005856 abnormality Effects 0.000 claims description 46
- 238000005259 measurement Methods 0.000 claims description 17
- 230000001186 cumulative effect Effects 0.000 claims description 3
- 238000010586 diagram Methods 0.000 description 28
- 238000000034 method Methods 0.000 description 27
- 238000012545 processing Methods 0.000 description 26
- 239000000725 suspension Substances 0.000 description 21
- 230000008569 process Effects 0.000 description 17
- 230000004048 modification Effects 0.000 description 13
- 238000012986 modification Methods 0.000 description 13
- 238000013016 damping Methods 0.000 description 12
- 230000000694 effects Effects 0.000 description 9
- 239000000463 material Substances 0.000 description 9
- 239000007769 metal material Substances 0.000 description 9
- 238000012795 verification Methods 0.000 description 9
- 230000002159 abnormal effect Effects 0.000 description 7
- 230000009471 action Effects 0.000 description 7
- 238000006243 chemical reaction Methods 0.000 description 6
- 238000004088 simulation Methods 0.000 description 6
- 238000009825 accumulation Methods 0.000 description 5
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 5
- 238000009434 installation Methods 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 238000005253 cladding Methods 0.000 description 4
- 230000007547 defect Effects 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 239000004065 semiconductor Substances 0.000 description 4
- 230000005284 excitation Effects 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 229910052751 metal Inorganic materials 0.000 description 3
- 230000001629 suppression Effects 0.000 description 3
- 229910001369 Brass Inorganic materials 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 2
- HCHKCACWOHOZIP-UHFFFAOYSA-N Zinc Chemical compound [Zn] HCHKCACWOHOZIP-UHFFFAOYSA-N 0.000 description 2
- 239000010951 brass Substances 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000007667 floating Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 229920000139 polyethylene terephthalate Polymers 0.000 description 2
- 239000005020 polyethylene terephthalate Substances 0.000 description 2
- 238000007493 shaping process Methods 0.000 description 2
- 239000011701 zinc Substances 0.000 description 2
- 229910052725 zinc Inorganic materials 0.000 description 2
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 1
- 229920000106 Liquid crystal polymer Polymers 0.000 description 1
- 239000004977 Liquid-crystal polymers (LCPs) Substances 0.000 description 1
- 239000006096 absorbing agent Substances 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 229910052799 carbon Inorganic materials 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 239000000945 filler Substances 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 210000003128 head Anatomy 0.000 description 1
- 230000002401 inhibitory effect Effects 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- -1 polyethylene terephthalate Polymers 0.000 description 1
- 230000001902 propagating effect Effects 0.000 description 1
- 238000002310 reflectometry Methods 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 230000007480 spreading Effects 0.000 description 1
Images

























Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0179—Display position adjusting means not related to the information to be displayed
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B30/00—Optical systems or apparatus for producing three-dimensional [3D] effects, e.g. stereoscopic images
- G02B30/50—Optical systems or apparatus for producing three-dimensional [3D] effects, e.g. stereoscopic images the image being built up from image elements distributed over a 3D volume, e.g. voxels
- G02B30/54—Optical systems or apparatus for producing three-dimensional [3D] effects, e.g. stereoscopic images the image being built up from image elements distributed over a 3D volume, e.g. voxels the 3D volume being generated by moving a 2D surface, e.g. by vibrating or rotating the 2D surface
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/10—Input arrangements, i.e. from user to vehicle, associated with vehicle functions or specially adapted therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/22—Display screens
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/23—Head-up displays [HUD]
- B60K35/235—Head-up displays [HUD] with means for detecting the driver's gaze direction or eye points
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/50—Instruments characterised by their means of attachment to or integration in the vehicle
- B60K35/53—Movable instruments, e.g. slidable
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0149—Head-up displays characterised by mechanical features
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G3/00—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes
- G09G3/20—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes for presentation of an assembly of a number of characters, e.g. a page, by composing the assembly by combination of individual elements arranged in a matrix no fixed position being assigned to or needed to be assigned to the individual characters or partial characters
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/30—Image reproducers
- H04N13/388—Volumetric displays, i.e. systems where the image is built up from picture elements distributed through a volume
- H04N13/395—Volumetric displays, i.e. systems where the image is built up from picture elements distributed through a volume with depth sampling, i.e. the volume being constructed from a stack or sequence of 2D image planes
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0149—Head-up displays characterised by mechanical features
- G02B2027/0154—Head-up displays characterised by mechanical features with movable elements
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0149—Head-up displays characterised by mechanical features
- G02B2027/0161—Head-up displays characterised by mechanical features characterised by the relative positioning of the constitutive elements
- G02B2027/0163—Electric or electronic control thereof
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0179—Display position adjusting means not related to the information to be displayed
- G02B2027/0183—Adaptation to parameters characterising the motion of the vehicle
Definitions
- the present invention relates to an image display device and an optical device, and is suitable, for example, for being mounted on a moving body such as a passenger car.
- a head-up display In recent years, an image display device called a head-up display has been developed and mounted on a moving body such as a passenger car.
- a head-up display mounted on a passenger car light modulated by image information is projected toward a windshield (a windshield), and reflected light is emitted to the driver's eyes.
- This allows the driver to see a virtual image of the image in front of the windshield. For example, the vehicle speed, the outside temperature, and the like are displayed as virtual images.
- it has been considered to display a navigation image or an image alerting a pedestrian as a virtual image.
- a laser light source such as a semiconductor laser may be used as a light source for generating a virtual image.
- the laser light scans the screen while the laser light is modulated according to the video signal.
- the laser light is diffused, and the area of light irradiated to the driver's eyes is widened.
- the driver slightly moves his / her head, his / her eyes do not deviate from the irradiation area, and the driver can view an image (virtual image) satisfactorily and stably.
- Patent Document 1 describes a configuration in which a screen is moved in an optical axis direction to change a virtual image forming position in a front-rear direction.
- the screen is driven at high speed using the electromagnetic actuator.
- the driver can visually recognize the image spreading in the depth direction.
- the base for supporting the driving unit of the screen is mounted on the fixed base via a damper. Thereby, the vibration generated at the time of driving the screen is absorbed by the damper before propagating to the fixed base.
- Patent Literature 1 a reaction force is applied from the support base to the fixed base due to a reaction caused by the movement of the movable portion, and the reaction force may cause vibration in a support member such as a case that supports the fixed base. . Due to this vibration, a resonance sound is generated in a support member such as a case.
- an object of the present invention is to provide an image display device and an optical device that can more effectively remove vibrations caused by moving a screen at high speed.
- the image display device a light source, a screen on which an image is formed by irradiating light from the light source, and an optical system that generates a virtual image by light from the screen, A drive unit for moving the screen in the optical axis direction, a support base for supporting the drive unit, and a dynamic damper installed on a non-movable part on the support base are provided.
- the vibration energy of the structure in which the driving unit and the support base are integrated is absorbed by the dynamic damper. Accordingly, in the target frequency band of the dynamic damper, the movement of the structure is suppressed, and the reaction from the structure is prevented from being applied to another member such as a case. Therefore, vibration of other members such as a case can be suppressed, and resonance in other members can be suppressed.
- the dynamic damper is one of the vibration suppression techniques, and an auxiliary mass body is added to a vibrating target object via a spring or the like, so that the target object vibrates. Is a device that suppresses resonance phenomena around the natural frequency.
- Dynamic dampers are used in the fields of machinery, construction, civil engineering, etc., and include dynamic vibration absorbers (DVA), tuned mass dampers (TMD), and mass dampers (TMD). ) And so on.
- An optical apparatus includes a light source, an optical system through which light from the light source is guided, a drive unit that moves the optical system, a support base that supports the drive unit, and the support unit.
- a dynamic damper installed on a non-movable part on the base.
- optical device According to the optical device according to the present aspect, the same effects as those of the first aspect can be obtained.
- FIGS. 1A and 1B are diagrams schematically illustrating a usage pattern of the image display device according to the first embodiment
- FIG. 1C is a schematic diagram illustrating the configuration of the image display device according to the first embodiment
- FIG. FIG. 2 is a diagram illustrating a configuration of an irradiation light generation unit and a circuit used for the irradiation light generation unit of the image display device according to the first embodiment.
- FIG. 3A is a perspective view schematically illustrating the configuration of the screen according to the first embodiment.
- FIG. 3B is a diagram schematically illustrating a method for scanning the screen with laser light according to the first embodiment.
- FIG. 4A is a perspective view illustrating a configuration of the driving unit according to the first embodiment.
- FIG. 4B is a perspective view illustrating the configuration of the driving unit according to the first embodiment with the magnetic cover and the structure removed.
- FIG. 5A is a perspective view illustrating the configuration of the magnetic circuit according to the first embodiment.
- FIG. 5B is a perspective view illustrating a process of installing the magnetic circuit on the support base according to the first embodiment.
- FIG. 6A is an exploded perspective view illustrating the process of assembling the magnetic cover and the dynamic damper according to the first embodiment.
- FIG. 6B is a perspective view illustrating a state where the magnetic cover and the dynamic damper according to the first embodiment are assembled.
- FIG. 7 is an exploded perspective view showing a process of assembling the support base and the fixed base according to the first embodiment.
- FIG. 8A is a perspective view illustrating a configuration in a state where the support member and the suspension are assembled according to the first embodiment.
- FIG. 8B is an exploded perspective view illustrating the mounting structure of the suspension to the support member according to the first embodiment.
- FIG. 9A is a graph illustrating an example of driving a screen according to the first embodiment.
- FIG. 9B is a diagram schematically illustrating a display example of an image according to the first embodiment.
- FIG. 10A is a diagram illustrating a drive model of a screen drive system according to the first embodiment.
- FIGS. 10B and 10C are graphs showing simulation results of gain characteristics and phase characteristics when the driving model of FIG. 10A is driven according to the first embodiment.
- FIGS. 11A and 11B are graphs showing verification results obtained by verifying the vibration damping action of the dynamic damper according to the first embodiment.
- FIGS. 12A and 12B are perspective views each showing a state where the magnetic cover and the dynamic damper are assembled according to a modification of the first embodiment.
- FIGS. 13A and 13B are perspective views each showing a state in which the magnetic cover and the dynamic damper are assembled according to another modification of the first embodiment.
- FIG. 14 is a perspective view illustrating a configuration of a driving unit according to another modification of the first embodiment.
- FIG. 15A is an exploded perspective view illustrating an assembling process of a dynamic damper according to another modification of the first embodiment.
- FIG. 15B is a side view according to another modification of the first embodiment when the vicinity of the dynamic damper is viewed in the negative Y-axis direction.
- FIG. 16 is a graph showing a verification result of verifying a noise suppressing action by a dynamic damper according to another modification of the first embodiment.
- FIG. 17 is a diagram illustrating a configuration of an irradiation light generation unit and a circuit used for the irradiation light generation unit of the image display device according to the second embodiment.
- FIG. 18A is a schematic diagram when the encoder and the scale according to the second embodiment are viewed in the Y-axis negative direction.
- FIG. 18B is a schematic diagram when the sensor and the scale according to the second embodiment are viewed in the negative direction of the X axis.
- FIG. 18C is a diagram schematically illustrating a detection signal of the encoder according to the second embodiment and a multiplied signal generated based on the detection signal of the encoder.
- FIG. 19 is a schematic diagram illustrating a circuit configuration according to the second embodiment.
- FIG. 20A is a graph schematically showing before and after the timing when the multiplied signal of the sensor according to the second embodiment is turned on.
- FIG. 20B is a graph schematically illustrating the relationship between the drive waveform according to the second embodiment and the multiplied signal of the sensor.
- FIG. 21A is a diagram schematically illustrating a circuit that connects a screen driving circuit and a coil according to the second embodiment.
- FIG. 21B is a graph schematically illustrating the output current of the screen drive circuit and the measured voltage of the voltage measurement circuit during the initial operation control of the image display device according to the second embodiment.
- FIG. 22 is a diagram schematically illustrating drive waveforms in initial control and normal control when the image display device according to the second embodiment is normal.
- FIG. 23 is a flowchart illustrating an abnormality detection process in initial control of the image display device according to the second embodiment.
- FIG. 24 is a flowchart illustrating an abnormality detection process in the normal control of the image display device according to the second embodiment.
- FIGS. 25A and 25B are graphs schematically showing the drive position and the accumulated error value in the normal control according to the second embodiment.
- FIG. 26A is a diagram illustrating a configuration of an optical system and a circuit unit of the laser radar according to the third embodiment.
- FIG. 26B is a perspective view illustrating a configuration of a projection optical system according to the third embodiment.
- FIG. 27A is a perspective view illustrating a configuration of an optical deflector before a dynamic damper according to the third embodiment is attached.
- FIG. 27B is a perspective view illustrating a configuration of an optical deflector that has been assembled according to the third embodiment.
- FIGS. 1A and 1B are diagrams schematically illustrating a usage pattern of the image display device 20.
- FIG. FIG. 1A is a schematic view of the inside of the passenger car 1 seen through from the side of the passenger car 1
- FIG. 1B is a view of the inside of the passenger car 1 as viewed from the front in the traveling direction.
- the image display device 20 is installed inside the dashboard 11 of the passenger car 1.
- the image display device 20 projects the laser light modulated by the video signal onto the projection area 13 below the windshield 12 near the driver's seat.
- the laser light is reflected by the projection area 13 and is applied to a horizontally long area (eye box area) around the position of the eyes of the driver 2.
- the predetermined image 30 is displayed as a virtual image in the field of view ahead of the driver 2.
- the driver 2 can see the virtual image 30 as being superimposed on the scene in front of the windshield 12. That is, the image display device 20 forms an image 30 which is a virtual image in a space in front of the projection area 13 of the windshield 12.
- FIG. 1C is a diagram schematically showing the configuration of the image display device 20.
- the image display device 20 includes the irradiation light generation unit 21 and the mirror 22.
- the irradiation light generator 21 emits light modulated by the video signal.
- the mirror 22 has a curved reflecting surface, and reflects the light emitted from the irradiation light generator 21 toward the windshield 12. The light reflected by the windshield 12 is applied to the eyes 2a of the driver 2.
- the optical system of the irradiation light generation unit 21 and the mirror 22 are designed so that the virtual image 30 is displayed in a predetermined size in front of the windshield 12.
- the mirror 22 constitutes an optical system for generating a virtual image by light generated from screens 108 and 109 described later.
- This optical system does not necessarily need to be constituted only by the mirror 22.
- the optical system may include a plurality of mirrors, and may include a lens and the like.
- FIG. 2 is a diagram illustrating a configuration of the irradiation light generation unit 21 of the image display device 20 and a configuration of a circuit used for the irradiation light generation unit 21.
- the irradiation light generation unit 21 includes a light source 101, collimator lenses 102a to 102c, a mirror 103, dichroic mirrors 104 and 105, a scanning unit 106, a correction lens 107, screens 108 and 109, and a driving unit 300. Prepare.
- the light source 101 includes three laser light sources 101a to 101c.
- the laser light sources 101a to 101c emit laser light in a red wavelength band, a green wavelength band, and a blue wavelength band, respectively.
- the light source 101 includes three laser light sources 101a to 101c in order to display a color image as the image 30.
- the light source 101 may include only one laser light source corresponding to the color of the image.
- the laser light sources 101a to 101c are made of, for example, semiconductor lasers.
- Laser lights emitted from the laser light sources 101a to 101c are converted into substantially parallel lights by the collimator lenses 102a to 102c, respectively.
- the laser beams emitted from the laser light sources 101a to 101c are each shaped into a circular beam by an aperture (not shown).
- a shaping lens for shaping the laser beam into a circular beam shape and turning it into parallel light may be used.
- the aperture may be omitted.
- the laser light of each color emitted from the laser light sources 101a to 101c has its optical axis aligned by the mirror 103 and the two dichroic mirrors 104 and 105.
- the mirror 103 substantially totally reflects the red laser light transmitted through the collimator lens 102a.
- the dichroic mirror 104 reflects the green laser light transmitted through the collimator lens 102b and transmits the red laser light reflected by the mirror 103.
- the dichroic mirror 105 reflects the blue laser light transmitted through the collimator lens 102c, and transmits the red laser light and the green laser light passing through the dichroic mirror 104.
- the mirror 103 and the two dichroic mirrors 104 and 105 are arranged so that the optical axes of the laser beams of the respective colors emitted from the laser light sources 101a to 101c are aligned.
- the scanning unit 106 reflects the laser light of each color via the dichroic mirror 105.
- the scanning unit 106 is composed of, for example, a micro electro mechanical system (MEMS) mirror, and moves a mirror 106 a on which laser light of each color enters via the dichroic mirror 105 to an axis parallel to the Y axis in accordance with a drive signal. And a configuration for rotating about an axis perpendicular to the Y axis. By rotating the mirror 106a in this manner, the reflection direction of the laser beam changes in the in-plane direction of the XZ plane and the in-plane direction of the YZ plane. Thus, the screens 108 and 109 are scanned by the laser light of each color, as described later.
- MEMS micro electro mechanical system
- the scanning unit 106 is configured by a MEMS mirror of a two-axis driving system, but the scanning unit 106 may have another configuration.
- the scanning unit 106 may be configured by combining a mirror that is driven to rotate around an axis parallel to the Y axis and a mirror that is driven to rotate around an axis perpendicular to the Y axis.
- the ⁇ ⁇ ⁇ correction lens 107 is designed to direct the laser light of each color in the positive Z-axis direction regardless of the swing angle of the laser light by the scanning unit 106.
- the screens 108 and 109 form an image by being scanned by the laser light, and have a function of diffusing the incident laser light to an area (eye box area) around the position of the eye 2a of the driver 2.
- the screens 108 and 109 are made of a transparent resin such as PET (polyethylene terephthalate).
- the screen 108 is used for displaying a depth image whose viewing distance changes in the depth direction
- the screen 109 is used for displaying a fixed image having a constant viewing distance.
- an arrow or the like for guiding the traveling direction of the vehicle is displayed as the depth image
- characters or the like indicating the vehicle speed or the outside temperature are displayed as the fixed image.
- the drive unit 300 reciprocates the screens 108 and 109 in a direction (Z-axis direction) parallel to the traveling direction of the laser beam.
- the configuration of the driving unit 300 will be described later with reference to FIGS. 4 (a) to 8 (b).
- the image processing circuit 201 includes an arithmetic processing unit such as a CPU (Central Processing Unit) and a memory, processes an input video signal, and controls the laser driving circuit 202, the mirror driving circuit 203, and the screen driving circuit 204.
- the laser driving circuit 202 changes the emission intensity of the laser light sources 101a to 101c according to a control signal from the image processing circuit 201.
- the mirror driving circuit 203 drives the mirror 106a of the scanning unit 106 according to a control signal from the image processing circuit 201.
- the screen drive circuit 204 drives the screens 108 and 109 according to a control signal from the image processing circuit 201.
- the control in the image processing circuit 201 during the image display operation will be described later with reference to FIG.
- FIG. 3A is a perspective view schematically illustrating the configuration of the screen 108.
- FIG. 3B is a diagram schematically illustrating a method of scanning the screen 108 with laser light.
- a plurality of first lens portions 108a for diverging the laser light in the X-axis direction are provided on the surface of the screen 108 on the laser light incident side (the surface on the negative side of the Z axis). , Are arranged in the X-axis direction.
- the shape of the first lens portion 108a when viewed in the Y-axis direction is a substantially arc shape.
- the width of the first lens unit 108a in the X-axis direction is, for example, 50 ⁇ m.
- a plurality of second lens portions 108b for diverging the laser light in the Y-axis direction are arranged on the surface on the laser light emission side (the surface on the positive side of the Z-axis) of the screen 108 so as to be arranged in the Y-axis direction. Is formed.
- the shape of the second lens portion 108b when viewed in the X-axis direction is a substantially arc shape.
- the width of the second lens section 108b in the Y-axis direction is, for example, 70 ⁇ m.
- the incident surface (the surface on the negative side of the Z-axis) of the screen 108 having the above configuration is scanned in the positive direction of the X-axis by the beam B1 on which the laser light of each color is superimposed, as shown in FIG.
- Scan lines L1 to Lk, through which the beam B1 passes, are set at predetermined intervals in the Y-axis direction with respect to the incident surface of the screen 108 in advance.
- the start position and the end position of the scanning lines L1 to Lk coincide in the X-axis direction.
- the diameter of the beam B1 is set to, for example, about 50 ⁇ m.
- An image is formed by scanning the scanning lines L1 to Lk at a high frequency with the beam B1 in which the laser light of each color is modulated by the video signal.
- the image formed in this manner is projected onto an area (eye box) around the position of the eye 2a of the driver 2 via the screen 108, the mirror 22, and the windshield 12 (see FIG. 1C).
- the driver 2 visually recognizes the image 30 as a virtual image in the space in front of the windshield 12.
- the screen 109 has the same configuration as the screen 108.
- the screen 109 has a smaller width in the Y-axis direction than the screen 108.
- the screen 109 is also scanned in the X-axis direction by the beam B1.
- the number of scan lines for screen 109 is less than the number of scan lines for screen 108.
- the screens 108 and 109 are integrally supported and driven by the driving unit 300.
- the screen 108 is scanned by the beam B1 while moving in the optical axis direction (Z-axis direction) together with the screen 109.
- the screen 109 is stopped at a predetermined position together with the screen 108, and is scanned by the beam B1.
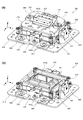
- FIG. 4A is a perspective view showing the configuration of the drive unit 300
- FIG. 4B is a perspective view showing the configuration of the drive unit 300 with the magnetic cover 302 and the holding unit 301 removed.
- 4A and 4B show a state in which the driving unit 300 is supported by the support base 306 and the fixed base 310.
- the configuration will be described in which the direction closer to the center of the driving unit 300 is defined as the inside in a plan view and the direction distant from the center of the driving unit 300 is defined as the outside, for convenience, in addition to defining the direction by the XYZ axes.
- the screens 108 and 109 are integrally supported by the holding unit 301 so as to be inclined in the same direction.
- the two screens 108 and 109 are arranged in a direction (Y-axis direction) perpendicular to the movement direction (Z-axis direction) by the driving unit 300 and are shifted from each other by a predetermined distance in the movement direction (Z-axis direction). is set up.
- the holding unit 301 includes a frame-shaped holder 301a that holds the screens 108 and 109, and plate-shaped light shielding members 301b and 301c that cover the periphery of the screens 108 and 109.
- the light blocking members 301b and 301c are for preventing natural light from the outside from going back through the optical system and entering the holder 301a.
- the periphery of the holding portion 301 is covered by a magnetic cover 302.
- the magnetic cover 302 is mounted on the upper surface of the magnetic circuit 307.
- the magnetic cover 302 is made of a magnetic material and functions as a yoke of the magnetic circuit 307.
- the magnetic cover 302 is installed on the driving unit 300.
- the magnetic cover 302 is provided with an opening 302a for passing the holding portion 301 and a slit 302b for passing the beam 303c (see FIG. 8A) of the support member 303.
- the holding portion 301 on which the screens 108 and 109 are installed is installed on the inner frame portion 303a of the support member 303 shown in FIG.
- the support member 303 is supported by two support units 305 arranged in the Y-axis direction so as to be movable in the Z-axis direction by four suspensions 304.
- the support unit 305 is installed on a support base 306.
- the support unit 305 includes gel covers 305a on the X axis positive side and the X axis negative side, respectively.
- the gel covers 305a are filled with gel for damping.
- the screens 108 and 109 are supported by the support base 306 so as to be movable in the Z-axis direction via the holding portion 301, the support member 303, the suspension 304, and the support unit 305.
- the configurations of the support member 303 and the suspension 304 will be described later with reference to FIGS.
- a magnetic circuit 307 is further provided on the support base 306.
- the magnetic circuit 307 is for applying a magnetic field to the coil 341 (see FIG. 8A) mounted on the support member 303.
- a drive signal (current) to the coil 341
- an electromagnetic force in the Z-axis direction is excited in the coil 341.
- the support member 303 is driven in the Z-axis direction together with the coil 341.
- the screens 108 and 109 move in the Z-axis direction.
- the configuration of the magnetic circuit 307 will be described later with reference to FIGS.
- the support base 306 is installed on the fixed base 310 via the damper unit 309.
- the damper unit 309 supports the support base 306 with the support base 306 floating in the positive Z-axis direction with respect to the fixed base 310.
- the damper unit 309 absorbs the vibration generated by driving the support member 303 before the vibration propagates from the support base 306 to the fixed base 310.
- the configurations of the damper unit 309 and the fixed base 310 will be described later with reference to FIG.
- the fixed base 310 is further provided with a position detection unit 400.
- the position detection unit 400 includes a printed circuit board 401 facing a side surface of the support member 303 on the X-axis positive side.
- An encoder (not shown) is arranged on the surface on the X-axis negative side of the printed circuit board 401. The encoder detects the position of the support member 303 in the Z-axis direction. A method of detecting the position of the support member 303 by the encoder will be described later with reference to FIG.
- FIG. 5A is a perspective view showing the configuration of the magnetic circuit 307.
- the magnetic circuit 307 includes two yokes 321 arranged so as to be arranged in the Y-axis direction.
- the shape of the yoke 321 when viewed in the X-axis direction is U-shaped.
- Each of the two yokes 321 has an inner wall portion 321b divided into two.
- a magnet 322 is installed inside the outer wall 321a of each yoke 321.
- magnets 323 are installed outside the two wall portions 321b inside each yoke 321 so as to face the magnets 322, respectively. Between the magnets 322 and 323 facing each other, a gap is formed in which a coil 341 (see FIG. 8A) described later is inserted.
- the magnetic circuit 307 includes two yokes 324 arranged so as to be arranged in the X-axis direction.
- the shape of the yoke 324 when viewed in the Y-axis direction is U-shaped.
- Each of the two yokes 324 has an outer wall 324a divided into two, and an inner wall 324b is also divided into two.
- Magnets 325 are installed inside the two walls 324a outside each yoke 324, respectively.
- magnets 326 are provided outside the two wall portions 324b inside each yoke 324 so as to face the magnets 325, respectively. Between the magnets 325 and 326 facing each other, there is a gap into which a coil 341 (see FIG. 8A) described later is inserted. The end in the Y-axis direction of the magnet 326 overlaps the side surface with the inner wall 321 b of the adjacent yoke 321.
- FIG. 5B is a perspective view showing a process of installing the magnetic circuit 307 on the support base 306.
- the support base 306 has a substantially rectangular outline in plan view.
- the support base 306 is made of a highly rigid metal material.
- an opening 311 for passing a laser beam is formed.
- circular holes 313 for installing the damper unit 309 are formed at the four corners of the support base 306, respectively.
- openings 312 for installing the support unit 305 are formed in the Y-axis positive side end and the Y-axis negative side end of the support base 306, respectively, at the center position in the X-axis direction.
- a plurality of bosses 314 for positioning the magnetic circuit 307 and the support unit 305 are formed on the upper surface (the surface on the positive side of the Z axis) of the support base 306.
- ⁇ Holes (not shown) are formed on the lower surfaces of the two yokes 321 and the two yokes 324 at positions where the bosses 314 of the support base 306 are fitted.
- the yokes 321 and 324 are installed on the upper surface of the support base 306 such that the bosses 314 fit into holes formed on the lower surfaces of the yokes 321 and 324.
- the magnetic circuit 307 is installed on the upper surface of the support base 306, as shown in FIG.
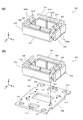
- FIG. 6A is an exploded perspective view showing an assembling process of the magnetic cover 302 and the dynamic damper 308.
- FIG. 6B is a perspective view showing a state where the magnetic cover 302 and the dynamic damper 308 are assembled.
- the dynamic damper 308 includes a mass member 308a, a damper 308b, a sleeve 308c, and a screw 308e.
- the mass member 308a is made of a material having a high specific gravity, such as a metal.
- the mass member 308a is made of a non-magnetic metal material such as brass, zinc, or copper in order to avoid an influence on the magnetic circuit 307. Be composed.
- the mass member 308a has a shape along a diagonal portion of the magnetic cover 302 in plan view.
- the two mass members 308a have the same shape.
- the material and mass of the two mass members 308a are the same.
- the mass member 308a has circular concave portions 308a1 on the upper surfaces at both ends, and circular concave portions 308a2 on the lower surfaces at both ends.
- the recesses 308a1 and 308a2 all have the same shape.
- the diameter of the concave portions 308a1 and 308a2 is larger than the width of the mass member 308a in the planar direction. Therefore, the sides of the recesses 308a1 and 308a2 are open.
- the recesses 308a1 and 308a2 arranged vertically are coaxially arranged.
- a circular opening 308a3 penetrating the concave parts 308a1 and 308a2 arranged vertically is formed.
- the opening 302a is also coaxial with the recesses 308a1 and 308a2 arranged vertically.
- a notch 308a4 is formed on the side of the opening 302a.
- the damper 308b is integrally formed of a material having excellent vibration damping properties.
- the damper 308b is formed of a material having a large viscous attenuation such as alpha gel or rubber.
- a groove 308b2 is formed over the entire periphery at a central position in the thickness direction.
- the damper 308b is mounted on the end of the mass member 308a such that the inner peripheral portion of the opening 308a3 fits into the groove 308b2, and the upper and lower portions of the damper 308b fit into the concave portions 308a1 and 308a2, respectively.
- the damper 308b is pushed from the notch 308a4 of the mass member 308a toward the opening 308a3.
- a cylindrical sleeve 308c is fitted into a hole 308b1 formed at the center of the damper 308b.
- the two dampers 308b are mounted on both ends of the mass member 308a.
- the thickness of the damper 308b is larger than the thickness of the mass member 308a. Therefore, when the damper 308b is mounted on the mass member 308a, the upper and lower ends of the damper 308b protrude from the upper and lower surfaces of the mass member 308a.
- the length of the sleeve 308c in the Z-axis direction is shorter than the thickness of the damper 308b, and the damper 308b is compressed to the same thickness as the length of the sleeve 308c while being fixed with the screw 308e.
- a screw hole 302c for fixing a screw 308e is formed in the magnetic cover 302.
- the sleeve 308c is attached to the hole 308b1 of the damper 308b.
- a washer 308d is placed on the upper surface of the damper 308b, and the screw 308e is fixed to the screw hole 302c of the magnetic cover 302 via the washer 308d and the sleeve 308c.
- the two dynamic dampers 308 are mounted on the magnetic cover 302 as shown in FIG.
- the upper and lower ends of the damper 308b protrude from the upper and lower surfaces of the mass member 308a. For this reason, in the state of FIG. 6B, the two mass members 308a are in a state of floating above the upper surface of the magnetic cover 302.
- FIG. 7 is an exploded perspective view showing an assembling process of the support base 306 and the fixed base 310.
- the damper unit 309 includes a damper 309a, a sleeve 309b, a washer 309c, and a screw 309d.
- the fixed base 310 has an opening 331 for passing laser light, a screw hole 335 for screwing the screw 309d, an opening 333 for installing the position detection unit 400, and a position for positioning the position detection unit 400. And a boss 334.
- the fixed base 310 is integrally formed of a highly rigid metal material.
- the damper 309a is integrally formed of a material having excellent vibration damping properties.
- the damper 309a is formed of a material having a large viscosity damping, such as alpha gel or rubber.
- a cylindrical sleeve 309b is fitted in a hole formed at the center of the damper 309a.
- Dampers 309a are fitted into holes 313 formed at four corners of the support base 306, respectively.
- the washer 309c is placed on the upper surface of the damper 309a.
- the screw 309d is passed through the washer 309c and is screwed into the screw hole 335 of the fixed base 310.
- the support base 306 is supported by the fixed base 310 via the damper 309a.
- FIG. 8A is a perspective view showing a configuration in a state where the support member 303 and the suspension 304 are assembled.
- FIG. 8B is an exploded perspective view showing an attachment structure of the suspension 304 to the support member 303.
- the support member 303 has a frame shape.
- the support member 303 is formed of a lightweight and highly rigid material.
- the support member 303 is formed of a liquid crystal polymer containing a carbon filler.
- the support member 303 includes an inner frame portion 303a and an outer frame portion 303b each having a substantially rectangular shape in plan view.
- the inner frame portion 303a and the outer frame portion 303b are connected by the four beam portions 303c so that the center of the inner frame portion 303a and the center of the outer frame portion 303b coincide with each other in plan view.
- the inner frame portion 303a is lifted to a position shifted upward (positive Z-axis direction) with respect to the outer frame portion 303b.
- the holding portion 301 shown in FIG. 4A is installed on the upper surface of the inner frame portion 303a.
- the coil 341 is mounted on the lower surface of the outer frame 303b.
- the coil 341 has a rectangular shape with rounded corners along the lower surface of the outer frame portion 303b.
- a connecting portion 303d extending radially is formed at each of the four corners of the outer frame portion 303b.
- Each of the connecting portions 303d has a flange at the upper end and the lower end.
- the end of the upper suspension 304 is fixed to the upper surface of the upper flange of the connecting portion 303d by a fixing tool 303e.
- an end of the lower suspension 304 is fixed to the lower surface of the lower flange portion of the connecting portion 303d by a fixing tool 303e.
- the suspension 304 is mounted on the support member 303.
- the fixing tool 303e includes a screw 351 and two plate-like clampers 352.
- the upper and lower surfaces of the two clampers 352 are oxidized for insulation, respectively. Further, these clampers 352 are provided with holes at the center.
- the diameter of the shaft of the screw 351 is smaller than the diameter of the hole of the clamper 352 and the diameter of the hole 304 b of the suspension 304.
- the hole 304 b of the suspension 304 is larger than the diameter of the hole of the clamper 352.
- the end of the suspension 304 is sandwiched between the two clampers 352 such that the hole 304b of the suspension 304 and the hole of the clamper 352 are coaxial.
- the end of the suspension 304 is placed on the upper surface of the connecting portion 303d of the support member 303, and the screw 351 is screwed into the screw hole 303h of the connecting portion 303d.
- the end of the suspension 304 is fixed to the upper surface of the connecting portion 303d of the support member 303.
- the lower suspension 304 is fixed to the lower surface of the connecting portion 303d.
- the support member 303 further includes a bridge portion 303f that connects the adjacent connection portions 303d in the Y-axis direction.
- the bridge portion 303f has a portion excluding both ends in the Y-axis direction extending parallel to the Y-axis direction, and has an installation surface 303g parallel to the YZ plane at the center of this portion.
- a scale is installed on the installation surface 303g of the bridge 303f on the X axis positive side of the support member 303.
- the suspensions 304 each have a mounting portion 304a at a center position in the X-axis direction for mounting the suspension 304 on the support unit 305.
- the mounting portion 304a By mounting the mounting portion 304a on the support unit 305 in FIG. 4B, the two suspensions 304 on the positive side of the Y axis and the two suspensions 304 on the negative side of the Y axis respectively become As shown in ()), it is supported by the support unit 305.
- the coil 341 mounted on the lower surface of the outer frame portion 303b is inserted into the gap between the opposed magnets of the magnetic circuit 307 shown in FIG.
- the scale installed on the installation surface 303g of the bridge 303f on the X-axis positive side of the support member 303 faces the encoder installed on the printed circuit board 401 of the position detection unit 400.
- the encoder of the position detection unit 400 includes an optical sensor that irradiates the scale with light and receives reflected light from the scale, and the optical sensor optically detects the movement of the scale in the Z-axis direction.
- the positions of the support member 303 and the screens 108 and 109 in the Z-axis direction are detected based on a detection signal from the encoder. Thereby, the driving of the screens 108 and 109 is controlled.
- FIG. 9A is a graph showing a driving example of the screen 108 when an image as shown in FIG. 9B is displayed in the area S1 in FIG. 9B.
- the screen 108 and the screen 109 move integrally.
- the screen 108 is repeatedly moved with time t0 to t5 as one cycle.
- the screen 108 is moved from the position Ps0 (farthest position) to the position Ps1 (the latest position).
- the screen 108 is moved from the position Ps1 (the latest position).
- the position is returned to the position Ps0 (the farthest position).
- the screen 108 is stopped at the position Ps1 (the closest position).
- the moving cycle of the screen 108 that is, the time from time t0 to t5 is, for example, 1/60 second.
- the screen 108 is moved as shown in FIG. 9A by changing the current applied to the coil 341 while monitoring the output of the encoder of the position detection unit 400.
- Time t0 to t1 is a period for displaying the depth image M1 that spreads in the depth direction in FIG. 9B
- time t2 to t5 is a time period in which the vertical image M2 that spreads in the vertical direction in FIG. This is the period for displaying.
- Time t1 to t2 is a period for displaying the fixed image M3 in the area S2 in FIG. 9B.
- the laser light sources 101a to 101c emit light at the timing corresponding to the depth image M1 on the scan line corresponding to the depth image M1 while linearly moving the screen 108 from the position Ps0 to the position Ps1. Accordingly, the depth image M1 as shown in FIG. 9B is displayed as a virtual image in the area S1.
- FIG. 10A is a diagram showing a drive model of a screen drive system.
- ma is the mass of the structure including the drive unit 300 and the support base 306, and mb is the mass of the dynamic damper 308 (mass member 308a) mounted on the magnetic cover 302.
- Ka and Ca are the spring constant and viscosity coefficient of the damper unit 309, respectively, and Kb and Cb are the spring constant and viscosity coefficient of the dynamic damper 308 (damper 308b), respectively.
- two dynamic dampers 308 and four damper units 309 are shown as being integrated, respectively.
- FIGS. 10B and 10C show simulation results obtained by simulation of the vibration damping action of the dynamic damper 308.
- fa is the resonance frequency of the structure
- fb is the resonance frequency of the dynamic damper 308.
- Other items are the same as the items shown in FIG.
- FIGS. 10B and 10C show the gain characteristics and the phase characteristics of the structure with and without the dynamic damper 308, respectively.
- 10A and 10B the horizontal axis represents the excitation frequency for the structure, and the vertical axis represents the gain and the phase.
- the peaks of the gain on both sides of the resonance point can be eliminated as shown in FIG.
- a peak having a small gain occurs near the resonance point, but the peak gain value is suppressed more than the gain values of the two peaks in the case of FIG. From this, it can be understood that the vibration of the structure can be effectively suppressed in the target frequency band by optimizing the parameter value of the dynamic damper 308.
- the inventors verified the vibration damping action of the dynamic damper 308 for the screen drive mechanism shown in FIG.
- one of the two dynamic dampers 308 is omitted, and only one dynamic damper 308 is installed on the magnetic cover 302.
- the structure consisting of the driving unit 300 and the support base 306 was vibrated while changing the excitation frequency, and the displacement of the structure at each excitation frequency was obtained by measurement based on laser Doppler to obtain a gain.
- the verification conditions were set as follows.
- FIG. 11A is a diagram illustrating gain characteristics when the parameter values of Table 3 are set as the parameter values of the dynamic damper 308.
- FIG. 11B is a diagram illustrating gain characteristics when the parameter values of Table 4 are set as the parameter values of the dynamic damper 308.
- 11A and 11B, the broken-line graphs show the gain characteristics when the dynamic damper 308 is not mounted, and the solid-line graphs show the gain characteristics when the dynamic damper 308 is mounted. .
- the structure including the driving unit 300 and the support base 306 vibrates.
- the structure when the movable part is driven at 60 Hz so as to include the stop period, the structure vibrates around 60 to 500 Hz. Therefore, in the present embodiment, it can be said that it is only necessary to suppress the vibration of the structure around 60 to 500 Hz.
- one dynamic damper 308 is used.
- a plurality of dynamic dampers 308 having different resonance frequencies a plurality of different frequency bands are used.
- the vibration of the structure including the driving unit 300 and the support base 306 can be suppressed.
- both the gain peak around 130 Hz and the gain peak around 150 Hz shown in FIGS. 11A and 11B can be suppressed.
- the plurality of dynamic dampers 308 having different resonance frequencies from each other it is possible to more effectively realize vibration suppression for the structure.
- the image display device 20 includes a driving unit 300 that moves the screens 108 and 109 in the optical axis direction, a support base 306 that supports the driving unit 300, And a dynamic damper 308 installed on the movable part (magnetic cover 302).
- the vibration energy of the structure in which the driving unit 300 and the support base 306 are integrated is absorbed by the dynamic damper 308.
- the target frequency band of the dynamic damper 308 in the target frequency band of the dynamic damper 308, the movement of the structure can be suppressed, and the recoil from the structure is applied to another member such as a case. Can be suppressed. Therefore, vibration of other members such as a case can be reduced, and resonance in other members can be suppressed.
- the magnetic circuit 307 includes a magnetic cover 302 mounted on an upper surface of the magnetic circuit 307 and functioning as a yoke of the magnetic circuit 307.
- a dynamic damper 308 is provided on the upper surface of the magnetic cover 302. is set up.
- the dynamic damper 308 of a desired size can be smoothly installed using a wide area on the upper surface of the magnetic cover 302.
- the support base 306 is supported by the fixed base 310 via the damper unit 309. This makes it difficult for the vibration to propagate from the support base 306 to the fixed base 310. Therefore, resonance is less likely to occur in other members supporting the fixed base 310.
- two dynamic dampers 308 having different resonance frequencies can be installed on the non-movable part (the magnetic cover 302). Accordingly, vibration of the structure in which the driving unit 300 and the support base 306 are integrated can be suppressed in different frequency bands. Therefore, it is possible to more effectively realize the vibration suppression for the structure.
- the resonance frequency of the dynamic damper 308 can be adjusted by adjusting the weight of the mass member 308a or the hardness (spring constant, viscosity coefficient) of the damper 308b.
- the weight of the mass member 308a is large.
- the resonance frequency of the dynamic damper 308 is proportional to the square root of the weight of the mass member 308a, it is necessary to greatly change the weight of the mass member 308a in order to adjust the resonance frequency of the dynamic damper 308.
- the weight of the mass member 308a of each dynamic damper 308 is set to be uniform, and the hardness (spring constant, viscosity coefficient) of the damper 308b is adjusted. It is preferable to do so.
- the resonance frequency of each dynamic damper 308 can be smoothly adjusted to the target frequency band, and the target vibration damping action can be easily realized.
- the two dynamic dampers 308 are installed on the non-movable part (magnetic cover 302) of the structure in which the driving unit 300 and the support base 306 are integrated, but are installed on the non-movable part.
- the number of dynamic dampers 308 is not limited to this.
- four dynamic dampers 308 may be installed on the non-movable part (the magnetic cover 302).
- the number of frequency bands to be damped can be increased, and the vibration of the structure can be more effectively suppressed.
- the arrangement method of the dynamic damper 308 is not limited to the first embodiment, and may be another arrangement method.
- two dynamic dampers 308 may be arranged at diagonal positions of the magnetic cover 302, or as shown in FIG. 13B, at positions of opposite sides of the magnetic cover 302. And two dynamic dampers 308 may be arranged in the second.
- the dynamic dampers 308 are respectively installed at symmetrical positions with respect to the center of the magnetic cover 302. Therefore, in these configurations, when the weight of each dynamic damper 308 is the same, the weight balance of the plurality of dynamic dampers 308 is substantially equal to the center of the magnetic cover 302. When the weight balance is substantially equal, the structure including the drive unit 300 and the support base 306 is less likely to move or rotate obliquely due to the vibration. Therefore, an image can be displayed more appropriately.
- the dynamic damper 308 is installed on the magnetic cover 302, but the installation target of the dynamic damper 308 is not limited to this.
- the dynamic damper 308 may be disposed on another non-movable portion such as the support base 306 and the magnetic circuit 307.
- the dynamic damper 308 can be smoothly arranged by using the upper surface of the magnetic cover 302 as an arrangement space as in the above embodiment.
- the dynamic dampers 308 are arranged on a non-movable portion other than the magnetic cover 302, it is preferable to arrange the dynamic dampers 308 at target positions with respect to the center axis of the support base 306. Accordingly, as in FIGS. 12A and 12B and FIGS. 13A and 13B, the structure including the driving unit 300 and the support base 306 moves or rotates obliquely with the vibration. Less likely to occur. Therefore, an image can be displayed more appropriately.
- the resonance frequencies of these dynamic dampers 308 do not necessarily have to be different.
- the shape and the number of the dampers 308b arranged in the dynamic damper 308 are not limited to those in the first embodiment, but can be changed as appropriate.
- another member such as a coil spring may be used as the damper 308b.
- the two screens 108 and 109 are installed on the holder 301a, but the number of screens installed on the holder 301a is not limited to two. For example, only one screen may be installed on holder 301a, or three screens may be installed on holder 301a.
- the structure of the dynamic damper is not limited to the structure of the first embodiment.
- a leaf spring may be used as a member constituting the spring constant Kb and the viscosity coefficient Cb in FIG.
- FIG. 14 is a perspective view showing a configuration of a driving unit 300 according to a modification in this case.
- two dynamic dampers 308 are omitted and a dynamic damper 500 is added, as compared with the configuration of the first embodiment shown in FIG.
- FIG. 15A is an exploded perspective view showing an assembling process of the dynamic damper 500.
- the dynamic damper 500 includes a screw 501, a support member 510, a mass member 520, a leaf spring 530, four screws 540, a leaf spring 550, and four screws 560.
- the support member 510 is made of an L-shaped metal material when viewed in the Y-axis direction. At the upper part of the support member 510, two flanges projecting in the negative direction of the X axis are formed, and a screw hole 511 is formed in the flange. Further, two flanges protruding in the negative direction of the X-axis are also formed below the support member 510, and a screw hole 512 is formed in the flange. In addition, a hole 513 that penetrates the upper surface of the support member 510 in the Z-axis direction is formed on the upper surface of the support member 510.
- the mass member 520 is made of a material having a high specific gravity such as a metal. Since the dynamic damper 500 is installed on the upper surface of the magnetic cover 302, the mass member 520 is made of a non-magnetic metal material such as brass, zinc, or copper to avoid affecting the magnetic circuit 307. Two screw holes 521 are formed at the upper end of the mass member 520, and two screw holes 522 are formed at the lower end of the mass member 520.
- the two leaf springs 530 and 550 are made of a metal material extending in the Y-axis direction and having a small thickness in the Z-axis direction.
- the plate spring 530 has two holes 531 near the center, and two holes 532 near the ends in the Y-axis direction.
- the plate spring 550 has two holes 551 near the center and two holes 552 near the ends in the Y-axis direction.
- the mass member 520 is positioned on the support member 510 such that the positions of the screw holes 521 and 522 are the same as the screw holes 511 and 512 of the support member 510 in the X-axis direction.
- the two screws 540 are fastened to the two screw holes 521 of the mass member 520 via the two holes 531 of the leaf spring 530.
- two screws 540 are fastened to two screw holes 511 of the support member 510 via two holes 532 of the leaf spring 530.
- two screws 560 are fastened to two screw holes 522 of the mass member 520 via two holes 551 of the leaf spring 550.
- two screws 560 are fixed to two screw holes 512 of the support member 510 via two holes 552 of the leaf spring 550.
- the screw 501 is fixed to a screw hole provided on the upper surface of the magnetic cover 302 via the hole 513.
- the dynamic damper 500 is assembled and installed on the upper surface of the magnetic cover 302.
- FIG. 15B is a side view when the vicinity of the dynamic damper 500 is viewed in the negative Y-axis direction.
- the mass member 520 of the dynamic damper 500 is installed on the upper surface of the magnetic cover 302 via the support member 510.
- the drive unit 300 is driven to vibrate the screens 108 and 109 up and down. Due to the reaction force of the drive, vibration in the up-down direction (Z-axis direction) is generated in a structure in which the drive unit 300 and the support base 306 are integrated.
- the mass member 520 swings up and down (Z-axis direction) as shown by a white arrow in FIG. 15B, while the two leaf springs 530 flex vertically.
- the vibration energy of the structure in which the driving unit 300 and the support base 306 are integrated is absorbed by the dynamic damper 500.
- the resonance frequency of the dynamic damper 500 can be easily adjusted by adjusting the length, thickness, and shape of the leaf spring 530. Therefore, the resonance frequency of the dynamic damper 500 can be smoothly adjusted according to the target frequency band, and the target vibration damping action can be more effectively achieved.
- the space near the side surface of the drive unit 300 can be used as the space for arranging the dynamic damper 500. Therefore, the dynamic damper 308 is arranged in a limited space on the upper surface of the magnetic cover 302 as in the first embodiment. In this case, a larger mass member 520 can be used as compared with the case where the mass member 520 is used. Therefore, intense vibration can be suppressed more effectively.
- the image display device 20 has a noise that is the most annoying to hear around 120 Hz. Therefore, the inventors have verified whether resonance near 120 Hz can be suppressed using the dynamic damper 500 shown in FIG.
- FIG. 16 is a graph showing the verification results.
- the vertical axis represents the sound pressure obtained by collecting noise generated by the microphone when the driving unit 300 is driven at the frequency on the horizontal axis.
- the verification conditions are as follows.
- the solid line is a graph of noise when the dynamic damper 500 is omitted from the configuration shown in FIG. 14, and the broken line is a graph of noise in the configuration of FIG.
- the noise around 120 Hz can be reduced by about 5 dB, and the noise that is most annoying in hearing can be effectively suppressed.
- the irradiation light generation unit 21 includes a position detection circuit 205.
- the position detection circuit 205 detects the positions of the screens 108 and 109 in the Z-axis direction based on the output from the encoder.
- the image processing circuit 201 processes the input video signal and the signal from the position detection circuit 205 to control the laser driving circuit 202, the mirror driving circuit 203, and the screen driving circuit 204.
- FIG. 18A is a schematic diagram when the encoder 410 and the scale 332 are viewed in the negative direction of the Y-axis.
- FIG. 18B is a schematic diagram when the sensors 412a to 412c and the scale 332 are viewed in the negative direction of the X-axis.
- the encoder 410 includes a light emitting unit 411 and sensors 412a, 412b, and 412c.
- Light emitting section 411 emits light toward scale 332.
- Light emitted from the light emitting unit 411 is reflected by the scale 332.
- the scale 332 moves in the Z-axis direction when the screens 108 and 109 are driven, so that the light emitted from the light emitting unit 411 scans the surface of the scale 332 on the X-axis positive side.
- the scale 332 includes a plate-shaped member 332a and reflection portions 332b and 332c.
- the plate member 332a is made of a member that transmits light, for example, glass.
- the reflection units 332b and 332c are made of, for example, a film that reflects light.
- the plurality of reflecting portions 332b are provided on the surface on the X-axis positive side of the plate-shaped member 332a so as to be arranged at equal intervals in the Z-axis direction.
- Only one reflector 332c is provided at the central position in the Z-axis direction of the area where the reflector 332b is arranged on the surface on the X-axis positive side of the plate-shaped member 332a.
- the reflecting portions 332b and 332c are arranged so as to be adjacent in the Y-axis direction.
- the light emitted from the light emitting unit 411 is applied to the irradiation area 413 on the surface on the X axis positive side of the plate-shaped member 332a.
- the light reflected at the irradiation areas 413a, 413b, and 413c is received by the sensors 412a, 412b, and 412c, respectively. That is, when the irradiation area 413a overlaps the reflection section 332b, the sensor 412a detects light, and when the irradiation area 413b overlaps the reflection section 332b, the sensor 412b detects light and the irradiation area 413c overlaps the reflection section 332c. , Sensor 412c detects light.
- the sensors 412a to 412c output signals corresponding to the amount of received light.
- the position of the irradiation region 413a and the position of the irradiation region 413b are slightly shifted in the Z-axis direction. Therefore, when the scale 332 moves in the Z-axis direction, the phases of the light received by the sensors 412a and 412b are different from each other. Therefore, according to the detection signals of the sensors 412a and 412b, it can be determined whether the scale 332 is moving in the positive direction of the Z-axis or in the negative direction of the Z-axis. In addition, according to the detection signal of the sensor 412c, it can be determined whether the irradiation area 413c overlaps the reflecting section 332c.
- the scale 332 is installed on the installation surface of the bridge 303f so that the screens 108 and 109 are positioned at the center (origin position) of the driving range in the Z-axis direction.
- FIG. 18C is a diagram schematically illustrating a detection signal of the encoder 410 and a multiplied signal generated based on the detection signal of the encoder 410.
- the multiplier is set to 1 for convenience.
- the multiplication number is not limited to this, and may be another multiplication number larger than 1 such as four times.
- the phases of the detection signals of the sensors 412a and 412b are shifted from each other.
- the detection signals of the sensors 412a and 412b are multiplied by a multiplying circuit 221 to be described later to generate a pulse-like multiplied signal.
- the counter 222 described later determines that the scale 332 (the screens 108 and 109) is moving in the positive direction of the Z axis if the multiplied signal of the sensor 412b is high at the timing when the multiplied signal of the sensor 412a rises.
- the detection signal of the sensor 412c rises when the screens 108 and 109 are positioned at the origin positions.
- the detection signal of the sensor 412c is also multiplied by a multiplying circuit 221 to be described later to generate a pulse-like multiplied signal. Therefore, the origin position of the scale 332 (the screens 108 and 109) can be detected by the multiplied signal of the sensor 412c.
- FIG. 19 is a schematic diagram showing a circuit configuration of the second embodiment.
- FIG. 19 shows a laser drive circuit 202, a mirror drive circuit 203, a screen drive circuit 204, a position detection circuit 205, and a drive unit 300 in addition to the circuits included in the image processing circuit 201 in FIG.
- the image processing circuit 201 includes a target waveform generation circuit 211, a differential circuit 212, a filter 213, a laser drive signal generation circuit 214, and a mirror drive signal generation circuit 215. , A control unit 231 and a storage unit 232.
- the target waveform generation circuit 211 generates a target waveform for driving the screens 108 and 109 along a target position.
- the differential circuit 212 outputs a signal corresponding to the difference between the target waveform signal output from the target waveform generation circuit 211 and the drive waveform signal output from the position detection circuit 205.
- the filter 213 removes a noise component from the signal output from the differential circuit 212.
- the screen driving circuit 204 drives the driving unit 300 based on the signal output from the filter 213. A circuit in which a current flows from the screen drive circuit 204 to the coil 341 will be described later with reference to FIG.
- the laser drive signal generation circuit 214 generates a signal for driving the laser drive circuit 202 based on the video signal.
- the laser drive signal generation circuit 214 outputs the generated drive signal to the laser drive circuit 202 in synchronization with the target waveform output from the target waveform generation circuit 211.
- the mirror drive signal generation circuit 215 outputs a signal for driving the mirror drive circuit 203 to the mirror drive circuit 203 in synchronization with the target waveform output from the target waveform generation circuit 211.
- the position detection circuit 205 includes a multiplication circuit 221 and a counter 222 in addition to the encoder 410 shown in FIG.
- the encoder 410 irradiates light to the scale 332 that moves according to the movement of the screens 108 and 109, and outputs detection signals of the sensors 412a to 412c.
- the multiplying circuit 221 converts the detection signals of the sensors 412a to 412c into a pulse-shaped binary signal, further multiplies the binary signal by a predetermined multiple, and outputs a multiplied signal of each detection signal. .
- the counter 222 counts the multiplied signal, and outputs the counting result to the differential circuit 212 as a signal indicating the actual driving position of the screens 108 and 109.
- a driving waveform of the screens 108 and 109 is configured by a signal output from the counter 222 over time.
- the servo circuit 230 is configured by the differential circuit 212, the filter 213, the screen drive circuit 204, and the position detection circuit 205.
- the control unit 231 detects whether or not the movement of the screens 108 and 109 is abnormal based on the multiplied signal or the like output from the multiplying circuit 221.
- the control unit 231 sets the gain of the drive signal for the screen drive circuit 204 and controls and stops feedforward (FF) and feedback (FB) for the servo circuit 230.
- the control unit 231 controls the laser driving circuit 202 and the mirror driving circuit 203.
- the control unit 231 includes a CPU and the like, and the storage unit 232 includes a register and the like. The processing of the abnormality detection will be described later with reference to FIGS. 21 (a) to 25 (b).
- FIG. 20A is a graph schematically showing before and after the timing when the multiplied signal of the sensor 412c is turned on.
- the counter 222 determines that the multiplied signal of the sensor 412a is high. The count value is incremented each time it rises. Then, at time T3, when the multiplied signal of the sensor 412c rises, that is, when the screens 108 and 109 reach the origin positions, the counter 222 is reset and the count value is set to 0.
- the counter 222 decreases the count value each time the multiplied signal of the sensor 412a rises. Also in this case, when the multiplied signal of the sensor 412c rises, the counter 222 is reset and the count value is set to 0.
- the counter 222 outputs the generated change in the count value as a drive waveform indicating the actual drive position of the screens 108 and 109. At this time, if the count value is reset at the timing when the multiplied signal of the sensor 412c rises as described above, the count value becomes 0 when the screens 108 and 109 are positioned at the origin positions. The positions of the screens 108 and 109 are appropriately represented.
- FIG. 20B is a graph schematically showing the relationship between the drive waveform and the multiplied signal of the sensor 412c.
- a period (time t1 to t2) for displaying the fixed image M3 shown in FIG. 9A is omitted.
- the counter 222 is reset at the timing when the multiplied signal of the sensor 412c rises.
- the offset of the drive waveform is eliminated, and the drive waveform generated by the counter 222 is maintained in an appropriate state. Therefore, based on the drive waveform generated by the counter 222, the image 30 can be displayed at a position with an appropriate viewing distance.
- FIG. 21A is a diagram schematically illustrating a circuit that connects the screen drive circuit 204 and the coil 341.
- the screen drive circuit 204, the coil 341, and the resistor 216 are connected in series, and the voltage measurement circuit 217 is connected in parallel with the coil 341 and the resistor 216.
- the screen drive circuit 204 supplies a current to the coil 341 and the resistor 216 so that the screens 108 and 109 move in the optical axis direction with a predetermined amplitude during the initial movement control of the image display device 20.
- the voltage measurement circuit 217 measures a voltage between the coil 341 and the resistor 216, and outputs the measured voltage value to the control unit 231 as a digital signal.
- the voltage measurement circuit 217 includes, for example, a sampling circuit that samples a voltage between the coil 341 and the resistor 216 at a constant cycle, and an AD converter that converts the sampled value into a digital signal.
- FIG. 21B is a graph schematically showing the output current of the screen drive circuit 204 and the measured voltage of the voltage measuring circuit 217 during the initial movement control of the image display device 20.
- the control unit 231 reciprocates the screens 108 and 109 in the Z-axis direction with the origin position interposed therebetween.
- the output current of the screen drive circuit 204 and the measurement voltage of the voltage measurement circuit 217 are sinusoidal.
- the voltage measured by the voltage measurement circuit 217 decreases. Therefore, when the amplitude of the measured voltage is smaller than the preset threshold value Va during the initial movement control of the image display device 20, it can be understood that the coil 341 is disconnected or a rare short circuit occurs. Specifically, when the measured voltage is 0, it can be determined that the coil 341 is disconnected, and when the amplitude of the measured voltage is larger than 0 and smaller than the threshold value Va, it is determined that a rare short has occurred in the coil 341. I can judge.
- the threshold value Va is set to, for example, about 50% of the amplitude of the measured voltage when the coil 341 is normal.
- FIG. 22 is a diagram schematically showing drive waveforms in the initial control and the normal control when the image display device 20 is normal.
- the gain set in the screen drive circuit 204 is gradually increased by feedforward (FF) control, and the screens 108 and 109 are driven so that the drive waveform becomes a sine wave. Is driven. That is, in the circuit shown in FIG. 19, the screen drive circuit 204 is driven according to a predetermined gain without the servo being applied by the servo circuit 230, and the screens 108 and 109 are reciprocated according to the drive of the screen drive circuit 204. Moving.
- FF feedforward
- the screens 108 and 109 are driven about one round trip, and thereafter, the screens 108 and 109 are moved to a start position (for example, a position corresponding to the initial position Ps0 in FIG. 9A). ),
- the normal control of the image display device 20 is started.
- the servo circuit 230 is turned on, and the screens 108 and 109 are servo-controlled by feedback (FB) control. That is, in the circuit of FIG. 19, a drive waveform is input from the position detection circuit 205 to the differential circuit 212, and the screens 108 and 109 are driven to have a desired drive waveform.
- FB feedback
- an abnormality in the position detection circuit 205 is detected as an abnormality in the movement of the screens 108 and 109.
- the abnormality of the position detection circuit 205 is detected based on the multiplied signal output from the multiplication circuit 221.
- an abnormality in the movement of the screens 108, 109 is detected based on the accumulated value of the difference between the drive waveforms of the screens 108, 109 and the target waveform.
- FIG. 23 is a flowchart showing an abnormality detection process in the initial movement control of the image display device 20.
- the abnormality detection processing described below is executed by the control unit 231.
- the control unit 231 starts the initial motion control while the driving of the light source 101 and the scanning unit 106 is kept off (S11).
- the gain set in the screen drive circuit 204 is gradually increased, and the screens 108 and 109 are driven by feedforward (FF) control.
- the position detection of the screens 108 and 109 by the position detection circuit 205 is started.
- the control unit 231 reciprocates the screens 108 and 109 while maintaining the gain of the screen drive circuit 204 at the target value.
- the operation is continued for a predetermined time, and the processing of S13 to S17 is executed.
- a period during which the operation of reciprocating the screens 108 and 109 is continued is referred to as a “determination section”.
- the control unit 231 determines whether the amplitude of the measurement voltage of the voltage measurement circuit 217 in the determination section is 0, and further determines whether the amplitude of the measurement voltage is smaller than the threshold Va. .
- the amplitude of the measurement voltage is, for example, a value obtained by subtracting the minimum value from the maximum value of the measurement voltage in the determination section and dividing by two.
- the threshold value Va is stored in the storage unit 232 in advance.
- the control unit 231 controls the screen driving circuit 204 to set the driving of the screens 108 and 109 to off (S18). As a result, the processing of FIG. 23 ends without performing the processing of S19 described later, and the display operation of the image 30 is prohibited.
- the control unit 231 advances the process to S15, and performs abnormality detection of the position detection circuit 205.
- the control unit 231 determines whether or not a multiplied signal based on the detection signals from the sensors 412a, 412b, and 412c is output from the multiplying circuit 221 in the determination section.
- the multiplication signal for at least one of the sensors 412a, 412b, and 412c is not output from the multiplication circuit 221 (S15: NO, S16: NO, or S17: NO)
- the positions of the screens 108 and 109 are detected. It is considered that some inconvenience occurred in the configuration for performing the operation.
- the control unit 231 when any of the multiplied signals is not output from the multiplying circuit 221 (S15: NO, S16: NO, or S17: NO), the control unit 231 generates an abnormality in the position detection of the screens 108 and 109. For this reason, the screen driving circuit 204 is controlled to turn off the driving of the screens 108 and 109 (S18). Also in this case, the processing of FIG. 23 is terminated without performing the processing of S19 described later, and the display operation of the image 30 is prohibited.
- the control unit 231 starts normal control of the image display device 20. Accordingly, the driving of the light source 101 and the scanning unit 106 is turned on, the servo circuit 230 is turned on, and the screens 108 and 109 are servo-controlled by feedback (FB) control. The display operation of the image 30 is performed by starting the normal control.
- FB feedback
- FIG. 24 is a flowchart showing an abnormality detection process in the normal control of the image display device 20.
- the control unit 231 clears the accumulated error value (S21).
- the error accumulation value is a value obtained by accumulating the absolute value of the difference between the target position (position on the target waveform) of the screens 108 and 109 and the actual driving position (count value of the counter 222). This difference is calculated and accumulated in the control unit 231 at regular intervals as the normal control proceeds.
- the error cumulative value is stored and updated in the storage unit 232, for example.
- control unit 231 sets the immediately preceding error accumulated value from the drive position to the immediately preceding error accumulation value every time a predetermined time elapses (S23: YES) until the image display of one frame ends (S22: NO).
- the absolute value (error absolute value) of the value obtained by subtracting the target position is added (S24).
- the control unit 231 repeats the addition processing (S23, S24) until the display of the image of one frame is completed.
- FIGS. 25A and 25B are graphs schematically showing the drive position and the accumulated error value in the normal control.
- FIG. 25A shows a state where the screens 108 and 109 are normally driven
- FIG. 25B shows a state where a problem occurs in driving the screens 108 and 109.
- the control unit 231 determines whether or not the error accumulated value is equal to or larger than the threshold value Eth (S25).
- the threshold value Eth is set to a value that can properly detect the accumulated error value when a problem occurs in driving the screens 108 and 109 as shown in FIG.
- the threshold value Eth is stored in the storage unit 232 in advance. If the error accumulation value is less than the threshold value Eth (S25: NO), the control unit 231 determines that the screens 108 and 109 are normally driven, and returns the processing to S21.
- the control unit 231 sets the driving of the light source 101, the scanning unit 106, and the screens 108 and 109 to off, and performs the display operation of the image 30. It is prohibited (S26).
- the control unit 231 detects an abnormality of the driving unit 300 based on the conduction state of the electric signal to the driving unit 300, and prohibits the display operation of the image 30 when the abnormality of the driving unit 300 is detected. Specifically, when the voltage applied to the coil 341 is smaller than a predetermined threshold, the controller 231 determines that the coil 341 has an abnormality such as disconnection or a rare short circuit, and prohibits the display operation of the image 30. This can prevent the display operation of the image 30 from being continued in an inappropriate viewing distance state.
- the control unit 231 monitors the position detection operation of the position detection circuit 205 (position detection unit) during the operation of the screens 108 and 109 to detect an abnormality of the position detection circuit 205. , The display operation of the image 30 is prohibited. Specifically, the control unit 231 monitors the multiplied signal output from the multiplying circuit 221 during the operation of the screens 108 and 109, and when the multiplied signal does not rise, the sensor 412a, 412b, 412c or the multiplied circuit. The display operation of the image 30 is prohibited because it is determined that a defect has occurred in the scale 221 or a defect such as adhesion, peeling, or breakage of the scale 332 has occurred. This can prevent the display operation of the image 30 from being continued in an inappropriate processing state. Further, it is possible to prevent the screens 108 and 109 from running away and colliding with the mechanism of the driving unit 300 or the like.
- the control unit 231 detects whether an abnormality has occurred in the movement of the screens 108 and 109 in the initial movement control for displaying the image 30. Thereby, an abnormality can be detected before starting the normal operation for displaying the image 30, so that the image 30 can be prevented from being displayed in an inappropriate state.
- the screens 108 and 109 When the screens 108 and 109 are servo-controlled, the screens 108 and 109 usually follow the target waveform, and the difference between the drive waveforms of the screens 108 and 109 and the target waveform becomes small. However, when the movement of the screens 108 and 109 is abnormal, the following of the screens 108 and 109 with respect to the target waveform is deteriorated, and the difference between the drive waveform and the target waveform may increase. According to the present embodiment, the display operation of the image 30 is prohibited based on the difference during the servo control of the screens 108 and 109.
- the control unit 231 determines whether or not the cumulative value of the difference between the drive waveforms of the screens 108 and 109 and the target waveform is larger than the predetermined threshold. Prohibit display operation. This can prevent the display operation of the image 30 from being continued in an inappropriate viewing distance state.
- the control unit 231 prohibits the display operation of the image 30 based on the difference in one frame section for displaying the image 30. As described above, when the abnormality is detected for each frame, the display operation of the image 30 can be promptly prohibited when an abnormality occurs in the movement of the screens 108 and 109.
- the abnormality of the driving unit 300 does not necessarily need to be detected by the voltage value applied to the coil 341, but may be detected by another parameter that can monitor the conduction state of the electric signal to the driving unit 300. Is also good. For example, based on the current flowing through the coil 341, it may be detected that the coil 341 has an abnormality such as disconnection or a rare short circuit. Further, the abnormality detection of the driving unit 300 is not limited to the initial operation, and may be performed during the normal operation.
- the screens 108 and 109 are not limited to the coil 341 and may be driven by another driving mechanism.
- the abnormality of the position detection circuit 205 does not necessarily need to be detected by the multiplied signal, and the position detection operation of the position detection circuit 205 (the position detection unit) can be monitored. It may be detected by another parameter.
- an abnormality of the position detection circuit 205 may be detected by a detection signal output from the sensors 412a, 412b, and 412c, or the position detection circuit 205 may not detect an abnormal change in the count value of the counter 222.
- An abnormality at 205 may be detected.
- the abnormality detection of the position detection circuit 205 is not limited to the initial operation, and may be performed during the normal operation.
- the abnormality detection at the time of the normal control shown in FIG. 23 is performed based on the error accumulated value in the image display section of one frame.
- the present invention is not limited to this. May be performed based on the accumulated error value.
- the abnormality detection during the normal operation is not limited to being performed based on the accumulated error value, but may be performed based on whether or not the difference exceeds a predetermined threshold. Further, in the image display section of one frame, if the number of times the difference exceeds the predetermined threshold exceeds a certain number, it may be determined that an abnormality has occurred during the normal control.
- the two screens 108 and 109 may not be used.
- only one screen may be reciprocated to generate an image.
- the laser radar 600 is mounted on the front side of the passenger car 1, and the line beam B10 is projected in front of the passenger car 1.
- FIG. 26A is a diagram showing a configuration of an optical system and a circuit unit of the laser radar 600.
- FIG. 26B is a perspective view showing the configuration of the projection optical system 610.
- 26A and 26B, X, Y, and Z axes orthogonal to each other are newly added for convenience of explanation.
- the directions of the X, Y, and Z axes do not match the directions of the X, Y, and Z axes used in the first and second embodiments.
- the laser radar 600 includes a projection optical system 610 and a light receiving optical system 620 as the configuration of the optical system.
- the projection optical system 610 generates a line beam B10 that is long in one direction (X-axis direction). Further, the projection optical system 610 scans the generated line beam B10 in the short side direction (Y-axis direction).
- the light receiving optical system 620 receives the reflected light of the laser beam projected from the projection optical system 610 from the object.
- the projection optical system 610 includes a light emitting unit 611, a fast axis cylindrical lens 612, a slow axis cylindrical lens 613, and an optical deflector 614.
- the light receiving optical system 620 includes a light receiving lens 621 and a light receiving element 622.
- the light emitting unit 611 is configured by integrating a plurality of laser light sources 611a.
- the laser light source 611a emits laser light having a predetermined wavelength.
- the laser radar 600 is mounted on a vehicle. Therefore, the emission wavelength of each laser light source 611a is set in an infrared wavelength band (for example, 905 nm).
- the laser light source 611a has a structure in which an active layer is sandwiched between an N-type cladding layer and a P-type cladding layer. By applying a voltage to the N-type cladding layer and the P-type cladding layer, laser light is emitted from the light emitting region of the active layer. In the light emitting region, the width in the direction parallel to the active layer is wider than the width in the direction perpendicular to the active layer. An axis in a direction perpendicular to the active layer is called a fast axis, and an axis in a direction parallel to the active layer is called a slow axis.
- the laser beam emitted from the light emitting region has a larger spread angle in the fast axis direction than in the slow axis direction. For this reason, the shape of the beam emitted from the light emitting region is an elliptical shape that is long in the fast axis direction.
- the plurality of laser light sources 611a are respectively arranged such that the slow axes are parallel to the X-axis direction.
- the plurality of laser light sources 611a are arranged so as to be arranged in a direction (X-axis direction) parallel to the slow axis.
- the light emitting unit 611 has a structure in which one semiconductor light emitting element in which a plurality of light emitting regions are arranged in the slow axis direction is installed on a base 611b.
- the semiconductor light emitting element a structural portion that emits laser light from each light emitting region corresponds to the laser light source 611a.
- the fast-axis cylindrical lens 612 converges the laser light emitted from each of the laser light sources 611a of the light-emitting unit 611 in the fast-axis direction, and adjusts the spread of the laser light in the fast-axis direction to a substantially parallel state.
- the slow axis cylindrical lens 613 converges the laser light emitted from each laser light source 611a of the light emitting unit 611 in the slow axis direction to adjust the spread of the laser light in the slow axis direction.
- each laser light source 611a is condensed in the slow axis direction by the slow axis cylindrical lens 613, and enters the mirror 614a of the optical deflector 614.
- the optical deflector 614 is, for example, a MEMS mirror using a piezoelectric actuator, an electrostatic actuator, or the like.
- the reflectivity of the mirror 614a is enhanced by a dielectric multilayer film, a metal film, or the like.
- the mirror 614a is driven to rotate about a rotation axis R10 parallel to the X axis.
- the light deflector 614 is provided with a position detection unit 614b (see FIG. 26A) for detecting the rotation position of the mirror 614a.
- a beam is formed by a collection of laser light from each laser light source 611a. Since the beam is focused only in the X-axis direction by the slow-axis cylindrical lens 613, the beam reflected by the mirror 614a spreads only in the X-axis direction. Thus, a line beam B10 that spreads in the X-axis direction is generated.
- the optical deflector 614 drives the mirror 614a in response to a drive signal from the mirror drive circuit 633, and scans the beam reflected from the mirror 614a in the Y-axis direction. As a result, the line beam B10 is scanned in the short direction (Y-axis direction).
- the reflected light of the line beam B10 reflected from the target area is condensed on the light receiving surface of the light receiving element 622 by the light receiving lens 621.
- the light receiving element 622 is, for example, an image sensor in which pixels are arranged vertically and horizontally in a matrix image.
- the pixel position in the X-axis direction on the light receiving surface corresponds to the position in the X-axis direction in the target area.
- the pixel position in the Y-axis direction on the light receiving surface corresponds to the position in the Y-axis direction in the target area. Therefore, it is possible to detect at which position in the X-axis direction and the Y-axis direction of the target area the object exists, based on the position of the pixel where the light receiving signal is generated.
- the laser radar 600 includes a controller 631, a laser driving circuit 632, a mirror driving circuit 633, and a signal processing circuit 634 as a circuit section.
- the controller 631 includes an arithmetic processing circuit such as a CPU (Central Processing Unit) and a storage medium such as a ROM (Read Only Memory) and a RAM (Random Access Memory), and controls each unit according to a preset program.
- the laser drive circuit 632 causes each laser light source 611a of the light emitting unit 611 to emit a pulse light under the control of the controller 631.
- the mirror drive circuit 633 drives the optical deflector 614 according to the control from the controller 631.
- the optical deflector 614 rotates the mirror 614a about the rotation axis R10, and scans the line beam B10 in the short side direction of the line beam B10.
- the signal processing circuit 634 outputs a light receiving signal of each pixel of the light receiving element 622 to the controller 631.
- the controller 631 detects where in the X-axis direction the object is located in the target area based on the position of the pixel where the light receiving signal is generated.
- the controller 631 determines the timing based on the time difference between the timing when the light emitting unit 611 emits the pulse light and the timing when the light receiving element 622 receives the reflected light from the target area, that is, the timing when the light receiving signal is received from the light receiving element 622. And the distance to an object existing in the target area.
- the controller 631 detects the presence or absence of an object in the target area by scanning the line beam B10 with the light deflector 614 while causing the light emitting unit 611 to emit a pulse, and further determines the position of the object and the distance to the object. measure. These measurement results are transmitted to the control unit of the passenger car 1 as needed.
- FIG. 27A is a perspective view showing the configuration of the optical deflector 614 before the dynamic damper 710 is attached.
- FIG. 27B is a perspective view illustrating the configuration of the optical deflector 614 that has been assembled.
- the optical deflector 614 drives the mirror 614a using electromagnetic force.
- a component for electromagnetic drive is installed in the housing 701.
- FIGS. 27A and 27B are provided with x, y, and z axes orthogonal to each other.
- the x-axis direction is a short side direction of the housing 701
- the y-axis direction is a long side direction of the housing 701
- the z-axis direction is a direction perpendicular to the upper surface of the housing 701.
- the x-axis direction matches the X-axis direction in FIGS. 26 (a) and 26 (b).
- the housing 701 has a rectangular parallelepiped shape elongated in the y-axis direction, and is made of a highly rigid metal material.
- the surface (bottom surface) on the z-axis negative side of the housing 701 is fixed to a support base in the laser radar 600.
- a rectangular recess 701a is formed in a plan view.
- a convex portion 701b protruding in the positive x-axis direction is formed on a surface on the positive x-axis side of the housing 701, and a convex portion 701c protruding in the negative x-axis direction is formed on a surface on the negative x-axis side of the housing 701.
- a frame-shaped leaf spring 702 is installed on the upper surface of the housing 701.
- the leaf spring 702 has a frame 702a, a support 702b, and two beams 702c. At an intermediate position in the y-axis direction, two beam portions 702c are formed so as to extend from the frame portion 702a in parallel in the x-axis direction, and the beam portion 702c connects the frame portion 702a and the support portion 702b. . Two beam portions 702c are connected to the support portion 702b at an intermediate position in the y-axis direction of the support portion 702b.
- the leaf spring 702 is integrally formed of a flexible metal material.
- a mirror 614a is fixed to the upper surface of the support 702b with an adhesive or the like.
- the mirror 614a is substantially square in plan view.
- the axis connecting the two beam portions 702c is the rotation axis R10 of the mirror 614a.
- the coil 703 is installed on the lower surface of the support 702b such that the middle position of the long side coincides with the rotation axis R10.
- the coil 703 has a round shape with rounded corners in plan view.
- Two sets of magnets 704 and 705 are arranged so as to sandwich the y-axis positive side and the y-axis negative side of the coil 703 in the y-axis direction, respectively.
- the magnet 704 and the magnet 705 are installed on a yoke 706, and the yoke 706 is installed on the bottom surface of the recess 701 a of the housing 701.
- the magnets 704 and 705 are permanent magnets having a substantially uniform magnetic flux density on the pole face.
- the direction of the magnetic field generated by the magnets 704 and 705 on the y-axis positive side is the same as the direction of the magnetic field generated by the magnets 704 and 705 on the y-axis negative side.
- the north pole of the magnet 704 on the y-axis positive side faces the coil 703, and the south pole of the magnet 704 on the y-axis negative side faces the coil 703.
- the y-axis positive side magnet 705 has an S pole facing the coil 703, and the y-axis negative side magnet 705 has an N pole facing the coil 703.
- a position detecting unit 614b (see FIG. 26A) for detecting the driving position (rotating position) of the mirror 614a is provided.
- the position detection unit 614b may be configured by, for example, a magnet provided on the support unit 702b and a Hall element provided to face the magnet.
- the position detection unit 614b may be configured by an optical sensor that irradiates a scale provided on the support unit 702b with light and receives reflected light from the scale. As long as the rotation position of the mirror 614a can be detected, the configuration of the position detection unit 614b can be appropriately changed.
- a dynamic damper 710 is provided for the convex portions 701b and 701c of the housing 701.
- the dynamic damper 710 includes two mass members 711, two leaf springs 712, and two leaf springs 713. As in the first and second embodiments, the mass of the mass member 711 and the spring constants and the viscosity coefficients of the leaf springs 712 and 713 are adjusted so as to suppress resonance at the target frequency.
- the two leaf springs 712 and 713 extend in the y-axis direction and are made of a metal material having a small thickness in the z-axis direction.
- the two leaf springs 712 are fixed to the upper and lower surfaces of the protrusion 701b using screws so as to sandwich the upper and lower surfaces of the protrusion 701b of the housing 701.
- the two leaf springs 713 are fixed to the upper and lower surfaces of the projection 701c using screws so as to sandwich the upper and lower surfaces of the projection 701c of the housing 701.
- the two mass members 711 are made of the same material as the mass member 520 shown in the modification of the second embodiment.
- the mass member 711 on the y-axis positive side has two leaf springs 712 and two leaf springs 713 at the positive y-axis end of the two leaf springs 712 and the positive y-axis end of the two leaf springs 713.
- the mass member 711 on the y-axis negative side includes two leaf springs 712 and two leaf springs 713 at the y-axis negative side end of the two leaf springs 712 and the y-axis negative side end of the two leaf springs 713. Fixed to.
- the two leaf springs 712 are fixed to the upper and lower surfaces of the mass member 711 using screws so as to sandwich the upper and lower surfaces near the x-axis positive side of the mass member 711.
- the two leaf springs 713 are fixed to the upper and lower surfaces of the mass member 711 using screws so as to sandwich the upper and lower surfaces near the negative side of the x-axis of the mass member 711.
- the optical deflector 614 is driven such that the mirror 614a reciprocates at a constant cycle about the rotation axis R10.
- each laser light source 611a is driven so that a pulse is emitted a plurality of times while the mirror 614a rotates in the range of the outward path.
- the controller 631 shown in FIG. 26A controls the laser driving circuit 632 and the mirror driving circuit 633 so that the range of the outward path of the mirror 614a matches the driving period of the laser light source 611a.
- the controller 631 controls the laser drive circuit 632 and the mirror drive circuit 633 based on the target waveform that defines the reciprocating motion of the mirror 614a. Specifically, similarly to the first and second embodiments, the controller 631 controls the mirror drive circuit so that the waveform of the detection signal output from the position detection unit 614b (the drive waveform of the mirror 614a) matches the target waveform. Servo is applied to the driving of the mirror 614a by 633. Further, the controller 631 drives the laser drive circuit 632 so that each of the laser light sources 11a emits a predetermined number of pulses in the forward path of the mirror 614a in the target waveform.
- the mass member 711 of the dynamic damper 710 is installed on the housing 701 via leaf springs 712 and 713.
- a vertical vibration z-axis direction
- the two mass members 711 swing vertically (Z-axis direction) while the plate springs 712 and 713 flex vertically.
- the vibration energy of the optical deflector 614 installed in the laser radar 600 is absorbed by the dynamic damper 710.
- the resonance frequency of the dynamic damper 710 can be easily adjusted by adjusting the length, thickness, and shape of the leaf springs 712, 713. Therefore, the resonance frequency of the dynamic damper 710 can be smoothly adjusted according to the target frequency band, and the target vibration damping action can be more effectively achieved.
- the controller 631 may prohibit the light emission by the light emitting unit 611 when the rotation of the mirror 614a is abnormal. Further, the controller 631 may monitor the position detecting operation of the position detecting unit 614b when the mirror 614a operates, and may prohibit the light emitting unit 611 from emitting light when detecting an abnormality of the position detecting unit 614b. Further, in the initial movement control, the controller 631 may detect whether or not the rotation of the mirror 614a is abnormal. Also, in the third embodiment, similarly to the second embodiment, the controller 631 inhibits the light emission of the light emitting unit 611 based on the difference between the drive waveform of the mirror 614a and the target waveform during the servo control of the mirror 614a. You may.
- the configurations of the image display device 20 and the irradiation light generation unit 21 are not limited to the configurations illustrated in FIGS. 1C and 2 and can be appropriately changed.
- the configuration of the driving unit 300 that moves the screens 108 and 109 is not limited to the configuration described in the embodiment, and can be appropriately changed.
- a configuration in which the screens 108 and 109 are driven by a piezoelectric or electrostatic drive unit may be employed.
- the examples of the screens 108 and 109 have been described as the optical systems to be moved, but other optical systems such as lenses and mirrors may be the moving objects.
- the example of the mirror 614a is described as an optical system to be moved, but another optical system such as a lens may be a movable object.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Combustion & Propulsion (AREA)
- Chemical & Material Sciences (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Optics & Photonics (AREA)
- Theoretical Computer Science (AREA)
- Computer Hardware Design (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Mechanical Optical Scanning Systems (AREA)
- Instrument Panels (AREA)
Abstract
画像表示装置は、光源と、光源からの光が照射されることにより画像が形成されるスクリーン(108、109)と、スクリーン(108、109)からの光により虚像を生成する光学系と、スクリーン(108、109)を光軸方向に移動させる駆動部(300)と、駆動部(300)を支持する支持ベース(306)と、を備える。さらに、画像表示装置は、支持ベース(306)上の非可動部に設置されたダイナミックダンパー(308)を備える。
Description
本発明は、画像表示装置および光学機器に関し、たとえば、乗用車等の移動体に搭載して好適なものである。
近年、ヘッドアップディスプレイと称される画像表示装置の開発が進められ、乗用車等の移動体に搭載されている。乗用車に搭載されるヘッドアップディスプレイでは、画像情報により変調された光がウインドシールド(フロントガラス)に向けて投射され、その反射光が運転者の目に照射される。これにより、運転者は、ウインドシールドの前方に、画像の虚像を見ることができる。たとえば、車速や外気温等が、虚像として表示される。最近では、ナビゲーション画像や、通行人を注意喚起する画像を虚像として表示することも検討されている。
上記ヘッドアップディスプレイでは、虚像を生成するための光源として、半導体レーザ等のレーザ光源が用いられ得る。この構成では、映像信号に応じてレーザ光が変調されつつ、レーザ光がスクリーンを走査する。スクリーンでは、レーザ光が拡散され、運転者の目に照射される光の領域が広げられる。これにより、運転者が多少頭を動かしても、目が照射領域から外れなくなり、運転者は、良好かつ安定的に画像(虚像)を見ることができる。
以下の特許文献1には、スクリーンを光軸方向に移動させて、虚像の結像位置を前後方向に変化させる構成が記載されている。この構成では、電磁アクチュエータを用いて、スクリーンが高速で駆動される。スクリーンの位置を光軸方向に高速で変化させながら、スクリーンに一連の画像を描画することにより、運転者に、奥行き方向に広がる画像を視認させることができる。
しかしながら、このようにスクリーンを高速で移動させると、スクリーンの移動に伴い振動が発生し、この振動によって共鳴音等が生じ得る。これを回避するため、上記特許文献1の構成では、スクリーンの駆動部を支持ベースが、ダンパーを介して、固定ベースに装着されている。これにより、スクリーン駆動時に生じた振動は、固定ベースに伝播する前に、ダンパーで吸収される。
しかながら、上記特許文献1の構成では、可動部の移動に伴う反動により支持ベースから固定ベースに反力が加わり、この反力により、固定ベースを支持するケース等の支持部材に振動が生じ得る。この振動により、ケース等の支持部材において、共鳴音が生じてしまう。
かかる課題に鑑み、本発明は、スクリーンを高速で移動させることにより生じる振動を、より効果的に取り除くことが可能な画像表示装置および光学機器を提供することを目的とする。
本発明の第1の態様に係る画像表示装置は、光源と、前記光源からの光が照射されることにより画像が形成されるスクリーンと、前記スクリーンからの光により虚像を生成する光学系と、前記スクリーンを光軸方向に移動させる駆動部と、前記駆動部を支持する支持ベースと、前記支持ベース上の非可動部に設置されたダイナミックダンパーと、を備える。
本態様に係る画像表示装置によれば、駆動部と支持ベースとが一体化された構造体の振動エネルギーが、ダイナミックダンパーによって吸収される。これにより、ダイナミックダンパーの目標周波数帯において、構造体の動きが抑制され、構造体からの反動がケース等の他の部材に付与されることが抑制される。よって、ケース等の他の部材の振動を抑制でき、他の部材における共鳴を抑制することができる。
なお、本態様に係る画像表示装置において、ダイナミックダンパーとは、振動抑制技術の一つであり、振動する対象物に、補助的な質量体を、バネなどを介して付加することにより、対象物の固有振動数周辺での共振現象を抑制する装置のことである。ダイナミックダンパー(dynamic damper)は、機械をはじめ建築、土木などの分野でも用いられており、動吸振器(DVA:Dynamic Vibration Absorber)、同調質量ダンパー(TMD:Tuned Mass Damper)、質量ダンパー(Mass Damper)等とも呼ばれている。
本発明の第2の態様に係る光学機器は、光源と、前記光源からの光が導かれる光学系と、前記光学系を移動させる駆動部と、前記駆動部を支持する支持ベースと、前記支持ベース上の非可動部に設置されたダイナミックダンパーと、を備える。
本態様に係る光学機器によれば、第1の態様と同様の効果が奏される。
以上のとおり、本発明によれば、スクリーンを高速で移動させることにより生じる振動を、より効果的に取り除くことが可能な画像表示装置および光学機器を提供することができる。
本発明の効果ないし意義は、以下に示す実施形態の説明により更に明らかとなろう。ただし、以下に示す実施形態は、あくまでも、本発明を実施化する際の一つの例示であって、本発明は、以下の実施形態に記載されたものに何ら制限されるものではない。
ただし、図面はもっぱら説明のためのものであって、この発明の範囲を限定するものではない。
以下、本発明の実施形態について図を参照して説明する。各図には、互いに直交するX、Y、Z軸が付記されている。本実施形態は、車載用のヘッドアップディスプレイに本発明を適用したものである。
<実施形態1>
図1(a)、(b)は、画像表示装置20の使用形態を模式的に示す図である。図1(a)は、乗用車1の側方から乗用車1の内部を透視した模式図、図1(b)は、乗用車1の内部から走行方向前方を見た図である。
図1(a)、(b)は、画像表示装置20の使用形態を模式的に示す図である。図1(a)は、乗用車1の側方から乗用車1の内部を透視した模式図、図1(b)は、乗用車1の内部から走行方向前方を見た図である。
図1(a)に示すように、画像表示装置20は、乗用車1のダッシュボード11の内部に設置される。
図1(a)、(b)に示すように、画像表示装置20は、映像信号により変調されたレーザ光を、ウインドシールド12下側の運転席寄りの投射領域13に投射する。レーザ光は、投射領域13で反射され、運転者2の目の位置周辺の横長の領域(アイボックス領域)に照射される。これにより、運転者2の前方の視界に、虚像として所定の画像30が表示される。運転者2は、ウインドシールド12の前方の景色上に、虚像である画像30を重ね合わせて見ることができる。すなわち、画像表示装置20は、虚像である画像30をウインドシールド12の投射領域13の前方の空間に結像させる。
図1(c)は、画像表示装置20の構成を模式的に示す図である。
画像表示装置20は、照射光生成部21と、ミラー22とを備える。照射光生成部21は、映像信号により変調された光を出射する。ミラー22は曲面状の反射面を有し、照射光生成部21から出射された光をウインドシールド12に向けて反射する。ウインドシールド12で反射された光は、運転者2の目2aに照射される。照射光生成部21の光学系とミラー22は、ウインドシールド12の前方に虚像による画像30が所定の大きさで表示されるように設計されている。
ミラー22は、後述するスクリーン108、109から生じた光により虚像を生成するための光学系を構成する。この光学系は、必ずしも、ミラー22のみから構成されていなくてもよい。たとえば、この光学系が、複数のミラーを含んでいてもよく、また、レンズ等を含んでいてもよい。
図2は、画像表示装置20の照射光生成部21の構成および照射光生成部21に用いる回路の構成を示す図である。
照射光生成部21は、光源101と、コリメータレンズ102a~102cと、ミラー103と、ダイクロイックミラー104、105と、走査部106と、補正レンズ107と、スクリーン108、109と、駆動部300とを備える。
光源101は、3つのレーザ光源101a~101cを備える。レーザ光源101a~101cは、それぞれ、赤色波長帯、緑色波長帯および青色波長帯のレーザ光を出射する。本実施形態では、画像30としてカラー画像を表示するために、光源101が3つのレーザ光源101a~101cを備えている。画像30として単色の画像を表示する場合、光源101は、画像の色に対応する1つのレーザ光源のみを備えていてもよい。レーザ光源101a~101cは、たとえば、半導体レーザからなっている。
レーザ光源101a~101cから出射されたレーザ光は、それぞれ、コリメータレンズ102a~102cによって略平行光に変換される。このとき、レーザ光源101a~101cから出射されたレーザ光は、それぞれ、図示しないアパーチャによって、円形のビーム形状に整形される。なお、コリメータレンズ102a~102cに代えて、レーザ光を円形のビーム形状に整形し且つ平行光化する整形レンズを用いてもよい。この場合、アパーチャは省略され得る。
その後、レーザ光源101a~101cから出射された各色のレーザ光は、ミラー103と2つのダイクロイックミラー104、105によって光軸が整合される。ミラー103は、コリメータレンズ102aを透過した赤色レーザ光を略全反射する。ダイクロイックミラー104は、コリメータレンズ102bを透過した緑色レーザ光を反射し、ミラー103で反射された赤色レーザ光を透過する。ダイクロイックミラー105は、コリメータレンズ102cを透過した青レーザ光を反射し、ダイクロイックミラー104を経由した赤色レーザ光および緑色レーザ光を透過する。ミラー103と2つのダイクロイックミラー104、105は、レーザ光源101a~101cから出射された各色のレーザ光の光軸を整合させるように配置されている。
走査部106は、ダイクロイックミラー105を経由した各色のレーザ光を反射する。走査部106は、たとえば、MEMS(micro electro mechanical system)ミラーからなっており、ダイクロイックミラー105を経由した各色のレーザ光が入射されるミラー106aを、駆動信号に応じて、Y軸に平行な軸とY軸に垂直な軸の周りに回転させる構成を備える。このようにミラー106aを回転させることにより、レーザ光の反射方向が、X-Z平面の面内方向およびY-Z平面の面内方向において変化する。これにより、後述のように、各色のレーザ光によってスクリーン108、109が走査される。
なお、ここでは、走査部106が、2軸駆動方式のMEMSミラーにより構成されたが、走査部106は、他の構成であってもよい。たとえば、Y軸に平行な軸の周りに回転駆動されるミラーと、Y軸に垂直な軸の周りに回転駆動されるミラーとを組み合わせて走査部106が構成されてもよい。
補正レンズ107は、走査部106によるレーザ光の振り角に拘わらず、各色のレーザ光をZ軸正方向に向かわせるように設計されている。スクリーン108、109は、レーザ光が走査されることにより画像が形成され、入射したレーザ光を運転者2の目2aの位置周辺の領域(アイボックス領域)に拡散させる作用を有する。スクリーン108、109は、PET(ポリエチレンテレフタレート)等の透明な樹脂からなっている。
スクリーン108は、奥行き方向に視距離が変化する奥行き画像を表示させるために用いられ、スクリーン109は、視距離が一定の固定画像を表示させるために用いられる。奥行き画像として、たとえば車両の進行方向を案内するための矢印等が表示され、固定画像として、たとえば車速や外気温を示す文字等が表示される。
駆動部300は、スクリーン108、109をレーザ光の進行方向に平行な方向(Z軸方向)に往復移動させる。駆動部300の構成は、追って、図4(a)~図8(b)を参照して説明する。
画像処理回路201は、CPU(Central Processing Unit)等の演算処理ユニットやメモリを備え、入力された映像信号を処理してレーザ駆動回路202、ミラー駆動回路203およびスクリーン駆動回路204を制御する。レーザ駆動回路202は、画像処理回路201からの制御信号に応じて、レーザ光源101a~101cの出射強度を変化させる。ミラー駆動回路203は、画像処理回路201からの制御信号に応じて、走査部106のミラー106aを駆動する。スクリーン駆動回路204は、画像処理回路201からの制御信号に応じて、スクリーン108、109を駆動する。画像表示動作時における画像処理回路201における制御については、追って、図9(a)を参照して説明する。
図3(a)は、スクリーン108の構成を模式的に示す斜視図である。図3(b)は、スクリーン108に対するレーザ光の走査方法を模式的に示す図である。
図3(a)に示すように、スクリーン108のレーザ光入射側の面(Z軸負側の面)には、レーザ光をX軸方向に発散させるための複数の第1のレンズ部108aが、X軸方向に並ぶように形成されている。Y軸方向に見たときの第1のレンズ部108aの形状は略円弧形状である。第1のレンズ部108aのX軸方向の幅は、たとえば、50μmである。
また、スクリーン108のレーザ光出射側の面(Z軸正側の面)には、レーザ光をY軸方向に発散させるための複数の第2のレンズ部108bが、Y軸方向に並ぶように形成されている。X軸方向に見たときの第2のレンズ部108bの形状は略円弧形状である。第2のレンズ部108bのY軸方向の幅は、たとえば、70μmである。
上記構成を有するスクリーン108の入射面(Z軸負側の面)が、図3(b)に示すように、各色のレーザ光が重ねられたビームB1によって、X軸正方向に走査される。スクリーン108の入射面に対して、予め、ビームB1が通る走査ラインL1~Lkが、Y軸方向に一定間隔で設定されている。走査ラインL1~Lkの開始位置と終了位置は、X軸方向において一致している。ビームB1の径は、たとえば、50μm程度に設定される。
映像信号により各色のレーザ光が変調されたビームB1により走査ラインL1~Lkが高周波で走査されることにより、画像が構成される。こうして構成された画像が、スクリーン108と、ミラー22およびウインドシールド12(図1(c)参照)を介して、運転者2の目2aの位置周辺の領域(アイボックス)に投射される。これにより、運転者2は、ウインドシールド12の前方の空間に、虚像として画像30を視認する。
スクリーン109も、スクリーン108と同様の構成となっている。スクリーン109は、Y軸方向の幅がスクリーン108よりも小さく設定されている。スクリーン109も、スクリーン108と同様、ビームB1によってX軸方向に走査される。スクリーン109に対する走査ラインの数は、スクリーン108に対する走査ラインの数よりも少ない。
本実施形態では、スクリーン108、109が一体的に支持されて駆動部300により駆動される。奥行き画像の表示において、スクリーン108は、スクリーン109とともに、光軸方向(Z軸方向)に移動されつつ、ビームB1によって走査される。固定画像の表示において、スクリーン109は、スクリーン108とともに所定の位置に停止されて、ビームB1によって走査される。
次に、駆動部300の構成について説明する。
図4(a)は、駆動部300の構成を示す斜視図、図4(b)は、磁気カバー302および保持部301を取り外した状態の駆動部300の構成を示す斜視図である。なお、図4(a)、(b)には、駆動部300が支持ベース306および固定ベース310に支持された状態が示されている。
なお、以下では、XYZ軸により方向を規定する他、便宜上、平面視において、駆動部300の中心に近い方を内側とし、駆動部300の中心から離れた方を外側として構成の説明を行う。
図4(a)に示すように、スクリーン108、109は、互いに同じ方向に傾くように保持部301に一体的に支持されている。2つのスクリーン108、109は、駆動部300による移動方向(Z軸方向)に垂直な方向(Y軸方向)に並び、且つ、移動方向(Z軸方向)に所定の距離だけ互いにずれた位置に設置されている。保持部301は、スクリーン108、109を保持する枠状のホルダ301aと、スクリーン108、109の周囲を覆う板状の遮光部材301b、301cとを備える。遮光部材301b、301cは、外部からの自然光が光学系を逆行してホルダ301aに入射することを防ぐためのものである。
保持部301の周囲は、磁気カバー302によって覆われている。磁気カバー302は、磁気回路307の上面に載せられている。磁気カバー302は、磁性材料からなっており、磁気回路307のヨークとして機能する。磁気回路307の上面に磁気カバー302が載せられると、磁気カバー302が磁気回路307に吸着される。これにより、磁気カバー302が駆動部300に設置される。
磁気カバー302には、保持部301を通すための開口302aと、支持部材303の梁部303c(図8(a)参照)を通すためのスリット302bが設けられている。磁気カバー302の上面に、2つのダイナミックダンパー308が設置されている。磁気カバー302とダイナミックダンパー308との組み立て方法については、追って、図6(a)、(b)を参照して説明する。
スクリーン108、109が設置された保持部301が、図4(b)に示す支持部材303の内枠部303aに設置される。支持部材303は、4つのサスペンション304によって、Z軸方向に移動可能に、Y軸方向に並ぶ2つの支持ユニット305に支持されている。支持ユニット305は、支持ベース306に設置されている。支持ユニット305は、X軸正側とX軸負側にそれぞれゲルカバー305aを備え、これらゲルカバー305a内にダンピングのためのゲルが充填されている。
こうして、スクリーン108、109は、保持部301、支持部材303、サスペンション304および支持ユニット305を介して、Z軸方向に移動可能に支持ベース306に支持される。支持部材303およびサスペンション304の構成は、追って、図8(a)、(b)を参照して説明する。
支持ベース306には、さらに、磁気回路307が設置されている。磁気回路307は、支持部材303に装着されたコイル341(図8(a)参照)に磁界を付与するためのものである。コイル341に駆動信号(電流)を印加することにより、コイル341にZ軸方向の電磁力が励起される。これにより、コイル341と共に支持部材303がZ軸方向に駆動される。こうして、スクリーン108、109が、Z軸方向に移動する。磁気回路307の構成は、追って、図5(a)、(b)を参照して説明する。
支持ベース306は、ダンパーユニット309を介して、固定ベース310に設置されている。ダンパーユニット309は、固定ベース310に対して支持ベース306をZ軸正方向に浮かせた状態で、支持ベース306を支持する。ダンパーユニット309は、支持部材303の駆動により生じた振動が支持ベース306から固定ベース310に伝搬する前に、振動を吸収する。ダンパーユニット309および固定ベース310の構成は、追って、図7を参照して説明する。
固定ベース310には、さらに、位置検出ユニット400が設置されている。位置検出ユニット400は、支持部材303のX軸正側の側面に対向するプリント基板401を備える。このプリント基板401のX軸負側の面にエンコーダ(図示せず)が配置されている。このエンコーダによって、支持部材303のZ軸方向の位置が検出される。エンコーダによる支持部材303の位置検出方法については、追って、図8(a)を参照して説明する。
図5(a)は、磁気回路307の構成を示す斜視図である。
磁気回路307は、Y軸方向に並ぶように配置された2つのヨーク321を備える。X軸方向に見たときのヨーク321の形状はU字状である。2つのヨーク321は、それぞれ、内側の壁部321bが2つに分かれている。各ヨーク321の外側の壁部321aの内側に磁石322が設置される。また、各ヨーク321の内側の2つの壁部321bの外側に、それぞれ、磁石322に対向するように磁石323が設置される。互いに対向する磁石322と磁石323との間には、後述するコイル341(図8(a)参照)が挿入される隙間が生じている。
さらに、磁気回路307は、X軸方向に並ぶように配置された2つのヨーク324を備える。Y軸方向に見たときのヨーク324の形状はU字状である。2つのヨーク324は、それぞれ、外側の壁部324aが2つに分かれており、内側の壁部324bも2つに分かれている。各ヨーク324の外側の2つの壁部324aの内側にそれぞれ磁石325が設置される。また、各ヨーク324の内側の2つの壁部324bの外側に、それぞれ、磁石325に対向するように磁石326が設置される。互いに対向する磁石325と磁石326との間には、後述するコイル341(図8(a)参照)が挿入される隙間が生じている。磁石326のY軸方向の端部は、隣り合うヨーク321の内側の壁部321bに側面に重なっている。
図5(b)は、磁気回路307を支持ベース306に設置する過程を示す斜視図である。
図5(b)に示すように、支持ベース306は、平面視において略長方形の輪郭を有する。支持ベース306は、剛性の高い金属材料からなっている。支持ベース306の中央には、レーザ光を通すための開口311が形成されている。また、支持ベース306の四隅には、それぞれ、ダンパーユニット309を設置するための円形の孔313が形成されている。
さらに、支持ベース306のY軸正側の端部とY軸負側の端部には、X軸方向の中央位置に、それぞれ、支持ユニット305を設置するための開口312が形成されている。また、支持ベース306の上面(Z軸正側の面)には、磁気回路307や支持ユニット305を位置決めするための複数のボス314が形成されている。
2つのヨーク321の下面と2つのヨーク324の下面には、それぞれ、支持ベース306のボス314が嵌まり込む位置に孔(図示せず)が形成されている。ヨーク321、324の下面に形成された孔にボス314が嵌まり込むようにして、ヨーク321、324が支持ベース306の上面に設置される。これにより、図4(b)に示すように、磁気回路307が、支持ベース306の上面に設置される。
図6(a)は、磁気カバー302とダイナミックダンパー308との組み立て過程を示す分解斜視図である。図6(b)は、磁気カバー302とダイナミックダンパー308とが組み立てられた状態を示す斜視図である。
図6(a)に示すように、ダイナミックダンパー308は、質量部材308aと、ダンパー308bと、スリーブ308cと、ネジ308eを備える。
質量部材308aは、金属等の高比重の材料からなっている。本実施形態では、ダイナミックダンパー308が磁気カバー302の上面に設置されるため、磁気回路307への影響を避けるために、質量部材308aが、真鍮や、亜鉛、銅等の非磁性の金属材料により構成される。質量部材308aは、平面視において、磁気カバー302の対角部分に沿う形状を有する。2つの質量部材308aは、同じ形状である。ここでは、2つの質量部材308aの材質および質量が互いに同じとなっている。
質量部材308aは、両端の上面にそれぞれ円形の凹部308a1を備え、両端の下面にもそれぞれ円形の凹部308a2を備える。凹部308a1、308a2は、全て同じ形状である。凹部308a1、308a2の直径は、質量部材308aの平面方向の幅よりも大きい。このため、凹部308a1、308a2の側方は、開放された状態となっている。上下に並ぶ凹部308a1、308a2は、同軸に配置されている。上下に並ぶ凹部308a1、308a2を貫通する円形の開口308a3が形成されている。開口302aも、上下に並ぶ凹部308a1、308a2と同軸である。開口302aの側方に切欠き308a4が形成されている。
ダンパー308bは、制振性に優れた材料により一体形成されている。たとえば、ダンパー308bは、アルファゲルや、ゴム等の粘性減衰が大きい材料から形成される。ダンパー308bの外周には、厚み方向の中央位置に、溝308b2が全周に亘って形成されている。
ダンパー308bは、溝308b2に開口308a3の内周部が嵌まり、且つ、ダンパー308bの上部および下部がそれぞれ凹部308a1、308a2に嵌まるようにして、質量部材308aの端部に装着される。このとき、ダンパー308bは、質量部材308aの切欠き308a4から開口308a3に向かって押し込まれる。その後、ダンパー308bの中心に形成された孔308b1に、円筒状のスリーブ308cが嵌められる。こうして、2つのダンパー308bが、質量部材308aの両端に装着される。
ダンパー308bの厚みは、質量部材308aの厚みよりも大きい。したがって、ダンパー308bが質量部材308aに装着された状態において、ダンパー308bの上端および下端は、質量部材308aの上面および下面から突出している。スリーブ308cのZ軸方向の長さは、ダンパー308bの厚みより短く、ネジ308eで固定された状態でダンパー308bがスリーブ308cの長さと同じ厚みまで圧縮される。
磁気カバー302には、上述の開口302aおよびスリット302bの他に、ネジ308eを留めるためのネジ孔302cが形成されている。上記のようにして2つのダンパー308bが質量部材308aの両端に装着された後、ダンパー308bの孔308b1にスリーブ308cが装着される。その後、ダンパー308bの上面にワッシャー308dが載せられ、ワッシャー308dおよびスリーブ308cを介してネジ308eが磁気カバー302のネジ孔302cに留められる。これにより、図6(b)に示すように、2つのダイナミックダンパー308が磁気カバー302に装着される。
上記のように、ダンパー308bの上端および下端は、質量部材308aの上面および下面から突出している。このため、図6(b)の状態において、2つの質量部材308aは、磁気カバー302の上面から浮いた状態となっている。
図7は、支持ベース306と固定ベース310の組み立て過程を示す分解斜視図である。
図7に示すように、ダンパーユニット309は、ダンパー309aと、スリーブ309bと、ワッシャー309cと、ネジ309dと、を備える。固定ベース310は、レーザ光を通すための開口331と、ネジ309dをネジ留めするためのネジ孔335と、位置検出ユニット400を設置するための開口333と、位置検出ユニット400を位置決めするためのボス334と、を備える。固定ベース310は、剛性の高い金属材料で一体形成されている。
ダンパー309aは、制振性に優れた材料により一体形成されている。たとえば、ダンパー309aは、アルファゲルや、ゴム等の粘性減衰が大きい材料から形成される。ダンパー309aの中心に形成された孔に、円筒状のスリーブ309bが嵌められている。支持ベース306の四隅に形成された孔313に、それぞれ、ダンパー309aが嵌められる。この状態で、ワッシャー309cがダンパー309aの上面に載せられる。さらに、ネジ309dがワッシャー309cに通されて、固定ベース310のネジ孔335にネジ留めされる。これにより、ダンパー309aを介して、支持ベース306が固定ベース310に支持される。
図8(a)は、支持部材303とサスペンション304とを組み立てた状態の構成を示す斜視図である。図8(b)は、支持部材303に対するサスペンション304の取り付け構造を示す分解斜視図である。
図8(a)に示すように、支持部材303は、枠状の形状を有する。支持部材303は、軽量かつ剛性の高い材料により形成される。たとえば、カーボンフィラー配合の液晶ポリマーによって支持部材303が形成される。支持部材303は、それぞれ平面視において略長方形の内枠部303aと外枠部303bとを備える。平面視において内枠部303aの中心と外枠部303bの中心が互いに一致するように、4つの梁部303cによって、内枠部303aと外枠部303bが連結されている。内枠部303aは、外枠部303bに対して上方(Z軸正方向)にシフトした位置に持ち上げられている。
内枠部303aの上面に、図4(a)に示した保持部301が設置される。また、外枠部303bの下面に、コイル341が装着される。コイル341は、外枠部303bの下面に沿うように、長方形の角が丸められた形状に周回している。
外枠部303bの四隅に、放射状に延びる連結部303dが形成されている。これら連結部303dは、上端および下端にそれぞれ鍔部を有する。連結部303dの上側の鍔部の上面に上側のサスペンション304の端部が固定具303eにより固着される。また、連結部303dの下側の鍔部の下面に下側のサスペンション304の端部が固定具303eにより固着される。こうして、サスペンション304が、支持部材303に装着される。
図8(b)に示すように、固定具303eは、ネジ351と、板状の2つのクランパ352とからなっている。2つのクランパ352は、それぞれ、絶縁のため、上下面に酸化処理が施されている。また、これらクランパ352には、中央に孔が設けられている。ネジ351の軸部の径は、クランパ352の孔の径およびサスペンション304の孔304bの径よりも小さい。また、サスペンション304の孔304bはクランパ352の孔の径より大きい。
サスペンション304の孔304bとクランパ352の孔とが同軸になるようにして、サスペンション304の端部が2つのクランパ352で挟まれる。この状態で、サスペンション304の端部が、支持部材303の連結部303dの上面に載せられて、ネジ351が連結部303dのネジ孔303hにネジ止めされる。これにより、サスペンション304の端部が支持部材303の連結部303dの上面に固定される。下側のサスペンション304も同様に連結部303dの下面に固定される。
図8(a)に示すように、支持部材303は、さらに、Y軸方向に隣り合う連結部303dを繋ぐ橋部303fを備える。橋部303fは、Y軸方向の両端を除く部分がY軸方向に平行に延びており、この部分の中央に、Y-Z平面に平行な設置面303gを有する。支持部材303のX軸正側の橋部303fの設置面303gに、スケールが設置される。
サスペンション304は、それぞれ、X軸方向の中央位置に、サスペンション304を支持ユニット305に装着するための装着部304aを有する。この装着部304aが、図4(b)の支持ユニット305に装着されることにより、Y軸正側の2つのサスペンション304と、Y軸負側の2つのサスペンション304が、それぞれ、図4(b)に示すように、支持ユニット305に支持される。これにより、外枠部303bの下面に装着されたコイル341が、図5(a)に示した磁気回路307の互いに対向する磁石間の隙間に挿入される。また、支持部材303のX軸正側の橋部303fの設置面303gに設置されたスケールが、位置検出ユニット400のプリント基板401に設置されたエンコーダに対向する。
位置検出ユニット400のエンコーダは、スケールに光を照射するとともに、スケールからの反射光を受光する光学センサを備え、この光学センサによってZ軸方向におけるスケールの移動を光学的に検出する。エンコーダからの検出信号に基づいて、支持部材303およびスクリーン108、109のZ軸方向の位置が検出される。これにより、スクリーン108、109の駆動が制御される。
図9(a)は、図9(b)に示すような画像を、図9(b)の領域S1に表示する際のスクリーン108の駆動例を示すグラフである。本実施形態では、スクリーン108とスクリーン109が一体的に移動する。
スクリーン108は、時刻t0~t5を1サイクルとして移動が繰り返される。時刻t0~t1の間に、スクリーン108は、位置Ps0(最遠位置)から位置Ps1(最近位置)へと移動され、時刻t2~t5の間に、スクリーン108は、位置Ps1(最近位置)から位置Ps0(最遠位置)へと戻される。時刻t1~t2の期間において、スクリーン108は、位置Ps1(最近位置)に停止される。スクリーン108の移動周期、すなわち、時刻t0~t5の時間は、たとえば、1/60秒である。スクリーン108は、位置検出ユニット400のエンコーダの出力を監視しながら、上述のコイル341に印加する電流を変化させることにより、図9(a)に示すように移動される。
時刻t0~t1は、図9(b)において、奥行き方向に広がる奥行き画像M1を表示するための期間であり、時刻t2~t5は、図9(b)において、鉛直方向に広がる鉛直画像M2を表示するための期間である。時刻t1~t2は、図9(b)において、領域S2に固定画像M3を表示するための期間である。
時刻t0~t1において、スクリーン108を位置Ps0から位置Ps1まで線形に移動させつつ、奥行き画像M1に対応する走査ライン上の、奥行き画像M1に対応するタイミングにおいて、レーザ光源101a~101cを発光させることにより、図9(b)に示すような奥行き画像M1が領域S1に虚像として表示される。
また、時刻t1~t2において、スクリーン108は位置Ps1に停止される。これに伴い、固定画像用のスクリーン109が固定画像M3の表示位置に停止される。この間に、固定画像M3に対応する走査ライン上の、固定画像M3に対応するタイミングにおいて、レーザ光源101a~101cを発光させることにより、投射領域13の前方の領域S2に固定画像M3が表示される。
さらに、時刻t2~t5において、スクリーン108が位置Ps0へと戻される。このとき、スクリーン108は、位置Ps2において、時刻t3~t4の間、停止される。この間に、鉛直画像M2に対応する走査ライン上の、鉛直画像M2に対応するタイミングにおいて、レーザ光源101a~101cを発光させることにより、ウインドシールド12の投射領域13の前方に、図9(b)に示すような鉛直画像M2が表示される。
次に、ダイナミックダンパー308の作用について説明する。
図10(a)は、スクリーン駆動系の駆動モデルを示す図である。
図10(a)において、maは、駆動部300および支持ベース306からなる構造体の質量であり、mbは、磁気カバー302に装着されたダイナミックダンパー308(質量部材308a)の質量である。また、Ka、Caは、それぞれ、ダンパーユニット309のバネ定数および粘性係数であり、Kb、Cbは、それぞれ、ダイナミックダンパー308(ダンパー308b)のバネ定数および粘性係数である。ここでは、2つのダイナミックダンパー308と、4つのダンパーユニット309が、それぞれ、統合されて示されている。
この駆動モデルでは、ダイナミックダンパー308の質量mb、バネ定数Kbおよび粘性係数Cbを調節することにより、質量maの構造体の振動エネルギーを、所望の周波数帯においてダイナミックダンパー308に吸収させることができる。これにより、構造体の共振を抑制することができる。
図10(b)、(c)は、ダイナミックダンパー308による制振作用をシミュレーションにより求めたシミュレーション結果である。
図10(b)のシミュレーション結果は、以下の条件に基づくものである。

図10(c)のシミュレーション結果は、以下の条件に基づくものである。

表1、2において、faは、構造体の共振周波数であり、fbは、ダイナミックダンパー308の共振周波数である。その他の項目は、図10(a)に示した項目と同様である。
図10(b)、(c)には、それぞれ、ダイナミックダンパー308がある場合とない場合の構造体のゲイン特性と位相特性が示されている。図10(a)、(b)の横軸は、構造体に対する加振周波数であり、縦軸は、ゲインおよび位相である。
図10(b)に示すように、ダイナミックダンパー308のパラメータ値を調節することにより、共振点におけるゲインのピークを低減することができる。しかしながら、図10(b)のシミュレーション結果では、ダイナミックダンパー308を装着した場合のゲイン特性において、共振点の両側のゲインがやや上昇し、2つの小さなピークが生じている。このため、ダイナミックダンパー308のパラメータ値をさらに最適化する必要がある。
これに対し、ダイナミックダンパー308のパラメータ値を上記表2のように修正すると、図10(c)に示すように、共振点両側のゲインのピークを解消できる。ここでは、共振点付近にゲインの小さな山が生じるが、そのピークのゲイン値は、図10(b)の場合の2つのピークのゲイン値よりも抑制されている。このことから、ダイナミックダンパー308のパラメータ値を最適化することにより、構造体の振動を目標の周波数帯において効果的に抑制できることが理解され得る。
<検証>
発明者らは、図4(a)に示したスクリーン駆動機構について、ダイナミックダンパー308による制振作用を実験により検証した。ここでは、2つのダイナミックダンパー308の一方を省略し、磁気カバー302に1つだけダイナミックダンパー308を設置した。加振周波数を変化させつつ駆動部300および支持ベース306からなる構造体を振動させ、各加振周波数における構造体の変位をレーザドップラーに基づく測定により求めてゲインを取得した。検証条件は、以下のように設定した。
発明者らは、図4(a)に示したスクリーン駆動機構について、ダイナミックダンパー308による制振作用を実験により検証した。ここでは、2つのダイナミックダンパー308の一方を省略し、磁気カバー302に1つだけダイナミックダンパー308を設置した。加振周波数を変化させつつ駆動部300および支持ベース306からなる構造体を振動させ、各加振周波数における構造体の変位をレーザドップラーに基づく測定により求めてゲインを取得した。検証条件は、以下のように設定した。


図11(a)は、ダイナミックダンパー308のパラメータ値として表3のパラメータ値を設定した場合のゲイン特性を示す図である。また、図11(b)は、ダイナミックダンパー308のパラメータ値として表4のパラメータ値を設定した場合のゲイン特性を示す図である。図11(a)、(b)において、破線のグラフは、ダイナミックダンパー308を装着しなかった場合のゲイン特性を示し、実線のグラフは、ダイナミックダンパー308を装着した場合のゲイン特性を示している。
図11(a)に示すように、表3のパラメータ値を有するダイナミックダンパー308を構造体に設置すると、130Hz付近のゲインのピークを抑制できた。また、図11(b)に示すように、表4のパラメータ値を有するダイナミックダンパー308を構造体に設置すると、230Hz付近のゲインのピークを抑制できた。したがって、これらの検証から、ダイナミックダンパー308を構造体に設置することにより、構造体の振動を所定の周波数帯でピンポイントに抑制できることが確認できた。
なお、本実施形態では、保持部301、支持部材303およびコイル341からなる可動部がZ軸方向に駆動されることにより、駆動部300および支持ベース306からなる構造体が振動する。ここで、図9(a)に示したように、停止期間を含むように可動部が60Hzで駆動されると、構造体には、60~500Hz付近で振動が生じる。したがって、本実施形態では、60~500Hz付近において構造体の振動を抑制できればよいと言える。
これに対し、図11(a)、(b)の検証では、ダイナミックダンパー308を構造体に装着することにより、130Hz付近のゲインのピークと、230Hz付近のゲインのピークが抑制されている。よって、表3、4のパラメータ値を有するダイナミックダンパー308は、本実施形態に係るスクリーン駆動機構の制振に、有効に作用すると言える。
なお、図11(a)、(b)の検証では、それぞれ、1つのダイナミックダンパー308を用いたが、共振周波数が互いに相違する複数のダイナミックダンパー308を用いることにより、互いに異なる複数の周波数帯において、駆動部300および支持ベース306からなる構造体の振動を抑制できる。たとえば、共振周波数が互いに相違する複数のダイナミックダンパー308を用いることにより、図11(a)、(b)に示した130Hz付近のゲインのピークと150Hz付近のゲインのピークの両方を抑制できる。このように、共振周波数が互いに相違する複数のダイナミックダンパー308を用いることにより、より効果的に、構造体に対する制振を実現することができる。
<実施形態1の効果>
実施形態1によれば、以下の効果が奏される。
実施形態1によれば、以下の効果が奏される。
図4(a)に示したように、画像表示装置20は、スクリーン108、109を光軸方向に移動させる駆動部300と、駆動部300を支持する支持ベース306と、支持ベース306上の非可動部(磁気カバー302)に設置されたダイナミックダンパー308と、を備える。これにより、駆動部300と支持ベース306とが一体化された構造体の振動エネルギーが、ダイナミックダンパー308によって吸収される。これにより、図11(a)、(b)に示したように、ダイナミックダンパー308の目標周波数帯において、構造体の動きを抑制でき、構造体からの反動がケース等の他の部材に付与されることを抑制できる。よって、ケース等の他の部材の振動を低減でき、他の部材における共鳴を抑制することができる。
図4(a)に示したように、磁気回路307は、磁気回路307の上面に載せられて磁気回路307のヨークとして機能する磁気カバー302を備え、ダイナミックダンパー308は、磁気カバー302の上面に設置されている。これにより、磁気カバー302上面の広いエリアを用いて、所望のサイズのダイナミックダンパー308を円滑に設置することができる。
図4(a)に示したように、支持ベース306は、ダンパーユニット309を介して、固定ベース310に支持されている。これにより、支持ベース306から固定ベース310に振動が伝搬しにくくなる。よって、固定ベース310を支持する他の部材において、より共鳴が生じにくくなる。
上述のように、本実施形態では、共振周波数が異なる2つのダイナミックダンパー308が、非可動部(磁気カバー302)に設置され得る。これにより、駆動部300と支持ベース306とが一体化された構造体の振動を、異なる周波数帯において抑制できる。よって、より効果的に、構造体に対する制振を実現することができる。
なお、ダイナミックダンパー308の共振周波数は、質量部材308aの重さ、またはダンパー308bの硬度(バネ定数、粘性係数)を調節することにより調整できる。ここで、制振効果を高めるためには、質量部材308aの重さが大きい方が好ましい。他方、質量部材308aの重さをダイナミックダンパー308ごとに相違させると構造体の重量バランスが不均衡になりやすい。また、ダイナミックダンパー308の共振周波数は、質量部材308aの重さの平方根に比例するため、ダイナミックダンパー308の共振周波数を調節するためには、質量部材308aの重さを大きく変化させる必要がある。
このため、複数のダイナミックダンパー308の共振周波数を互いに相違させる場合には、各ダイナミックダンパー308の質量部材308aの重さを均一に設定し、ダンパー308bの硬度(バネ定数、粘性係数)を調節するようにすることが好ましい。これにより、各ダイナミックダンパー308の共振周波数を、目標の周波数帯に円滑に調節することができ、目標の制振作用を容易に実現することができる。
<実施形態1の変更例>
以上、本発明の実施形態1について説明したが、本発明は、上記実施形態1に限定されるものではなく、また、本発明の適用例も、上記実施形態1の他に、種々の変更が可能である。
以上、本発明の実施形態1について説明したが、本発明は、上記実施形態1に限定されるものではなく、また、本発明の適用例も、上記実施形態1の他に、種々の変更が可能である。
たとえば、上記実施形態1では、駆動部300と支持ベース306とが一体化された構造体の非可動部(磁気カバー302)に2つのダイナミックダンパー308が設置されたが、非可動部に設置されるダイナミックダンパー308の数はこれに限られるものではない。
たとえば、図12(a)、(b)に示すように、4つのダイナミックダンパー308が、非可動部(磁気カバー302)に設置されてもよい。これにより、制振対象の周波数帯の数を増やすことができ、構造体の振動をより効果的に抑制することができる。
また、ダイナミックダンパー308の配置方法は、上記実施形態1に限られるものではなく、他の配置方法であってもよい。
たとえば、図13(a)のように、磁気カバー302の対角の位置に2つのダイナミックダンパー308が配置されてもよく、あるいは、図13(b)のように、磁気カバー302の対辺の位置に2つのダイナミックダンパー308が配置されてもよい。
なお、図12(a)、(b)および図13(a)、(b)の配置方法では、磁気カバー302の中心に対して対称な位置にそれぞれダイナミックダンパー308が設置される。したがって、これらの構成では、各ダイナミックダンパー308の重さが同一である場合に、複数のダイナミックダンパー308の重量バランスが、磁気カバー302の中心に対して略均等となる。このように重量バランスが略均等となると、駆動部300と支持ベース306とからなる構造体が、その振動に伴い、斜めに移動しあるいは回動することが起こりにくくなる。よって、より適切に画像を表示させることができる。
また、上記実施形態1では、ダイナミックダンパー308が磁気カバー302に設置されたが、ダイナミックダンパー308の設置対象はこれに限られるものではない。たとえば、支持ベース306や磁気回路307等の他の非可動部に、ダイナミックダンパー308が配置されてもよい。但し、磁気カバー302の上面には、広い空きスペースが存在するため、上記実施形態のように、磁気カバー302の上面を配置スペースとして用いることにより、ダイナミックダンパー308を円滑に配置することができる。
なお、磁気カバー302以外の非可動部に複数のダイナミックダンパー308を配置する場合は、支持ベース306の中心軸に対して対象な位置にダイナミックダンパー308を配置するのが好ましい。これにより、図12(a)、(b)および図13(a)、(b)と同様、駆動部300と支持ベース306とからなる構造体が、振動に伴い、斜めに移動しあるいは回動することが起こりにくくなる。よって、より適切に画像を表示させることができる。
また、非可動部に複数のダイナミックダンパー308を配置する場合、これらダイナミックダンパー308の共振周波数は、必ずしも相違していなくてもよい。また、ダイナミックダンパー308に配置されるダンパー308bの形状や数は、上記実施形態1に限定されるものではなく、適宜変更可能である。たとえば、ダンパー308bとして、コイルバネ等の他の部材が用いられてもよい。
また、上記実施形態1では、2つのスクリーン108、109がホルダ301aに設置されたが、ホルダ301aに設置されるスクリーンの数は、2つに限られるものではない。たとえば、ホルダ301aにスクリーンが1つだけ設置されてもよく、3つのスクリーンがホルダ301aに設置されてもよい。
また、ダイナミックダンパーの構成も、上記実施形態1の構成に限られるものではない。たとえば、図10(a)のバネ定数Kbおよび粘性係数Cbを構成する部材として、板バネが用いられてもよい。
図14は、この場合の変更例に係る駆動部300の構成を示す斜視図である。この変更例では、図4(a)に示した実施形態1の構成と比較して、2つのダイナミックダンパー308が省略され、ダイナミックダンパー500が追加されている。
図15(a)は、ダイナミックダンパー500の組み立て過程を示す分解斜視図である。
ダイナミックダンパー500は、ネジ501と、支持部材510と、質量部材520と、板バネ530と、4つのネジ540と、板バネ550と、4つのネジ560と、を備える。
支持部材510は、Y軸方向に見てL字形状の金属材料からなっている。支持部材510の上部には、X軸負方向に突出した2つの鍔部が形成されており、この鍔部にネジ孔511が形成されている。また、支持部材510の下部にも、X軸負方向に突出した2つの鍔部が形成されており、この鍔部にネジ孔512が形成されている。また、支持部材510の上面には、支持部材510の上面をZ軸方向に貫通する孔513が形成されている。
質量部材520は、金属等の高比重の材料からなっている。ダイナミックダンパー500は磁気カバー302の上面に設置されるため、磁気回路307への影響を避けるために、質量部材520は、真鍮や、亜鉛、銅等の非磁性の金属材料により構成される。質量部材520の上端部分には、2つのネジ孔521が形成されており、質量部材520の下端部分には、2つのネジ孔522が形成されている。
2つの板バネ530、550は、Y軸方向に延び、Z軸方向の厚みが薄い金属材料からなっている。板バネ530には、中央付近に2つの孔531が形成され、Y軸方向の端部付近に2つの孔532が形成されている。板バネ550には、中央付近に2つの孔551が形成され、Y軸方向の端部付近に2つの孔552が形成されている。
質量部材520は、X軸方向において、ネジ孔521、522の位置が支持部材510のネジ孔511、512と同じ位置になるように、支持部材510に位置付けられる。この状態で、2つのネジ540が、板バネ530の2つの孔531を介して、質量部材520の2つのネジ孔521に留められる。また、2つのネジ540が、板バネ530の2つの孔532を介して、支持部材510の2つのネジ孔511に留められる。同様に、2つのネジ560が、板バネ550の2つの孔551を介して、質量部材520の2つのネジ孔522に留められる。また、2つのネジ560が、板バネ550の2つの孔552を介して、支持部材510の2つのネジ孔512に留められる。
そして、ネジ501が、孔513を介して、磁気カバー302の上面に設けられたネジ孔に留められる。こうして、図14に示すように、ダイナミックダンパー500が組み立てられ、磁気カバー302の上面に設置される。
図15(b)は、ダイナミックダンパー500の近傍をY軸負方向に見た場合の側面図である。
ダイナミックダンパー500の質量部材520は、支持部材510を介して磁気カバー302の上面に設置されている。スクリーン108、109を上下に振動させるために駆動部300が駆動され、この駆動の反力により駆動部300と支持ベース306とが一体化された構造体に上下方向(Z軸方向)の振動が生じると、2つの板バネ530が上下方向に撓みながら、図15(b)において白抜きの矢印で示すように、質量部材520が上下方向(Z軸方向)に揺動する。これにより、駆動部300と支持ベース306とが一体化された構造体の振動エネルギーが、ダイナミックダンパー500によって吸収される。
この変更例によれば、ダンパー309aに代えて板バネ530が用いられるため、板バネ530の長さや厚み、形状を調節することにより、ダイナミックダンパー500の共振周波数を容易に調節できる。よって、ダイナミックダンパー500の共振周波数を、目標の周波数帯により円滑に調節することができ、目標の制振作用をより効果的に達成することができる。
また、この変更例では、駆動部300の側面付近の空間をダイナミックダンパー500の配置スペースに用い得るため、上記実施形態1のように磁気カバー302の上面の限られたスペースにダイナミックダンパー308を配置する場合に比べて、より大きな質量部材520を用い得る。よって、激しい振動をより効果的に抑制することができる。
なお、発明者らの検討によると、画像表示装置20では、聴覚上最も煩わしく感じる騒音が120Hz付近であることが分かった。そこで、発明者らは、図14に示したダイナミックダンパー500を用いて120Hz付近の共振を抑制可能かを検証した。
図16は、この検証結果を示すグラフである。
図16のグラフにおいて、縦軸は、駆動部300を横軸の周波数で駆動させた場合に生じる騒音をマイクで集音して得られた音圧である。検証条件は、以下のとおりである。

図16において、実線は、図14に示した構成からダイナミックダンパー500を省略した場合の騒音のグラフであり、破線は、図14の構成における騒音のグラフである。図16に示すように、本変更例に係るダイナミックダンパー500を用いることにより、120Hz付近の騒音を約5dB低減でき、聴覚上最も煩わしく感じる騒音を効果的に抑制できることを確認できた。
<実施形態2>
実施形態2では、さらに、スクリーン108、109の移動に異常が生じているか否かが検出され、異常が検出された場合にスクリーン108、109に対する光の照射を禁止する制御が行われる。上述のように、スクリーン108、109の移動は、プリント基板401(図4(a)参照)に配置されたエンコーダと、支持部材303の設置面303g(図8(a)参照)に設置されたスケールとによって検出される。
実施形態2では、さらに、スクリーン108、109の移動に異常が生じているか否かが検出され、異常が検出された場合にスクリーン108、109に対する光の照射を禁止する制御が行われる。上述のように、スクリーン108、109の移動は、プリント基板401(図4(a)参照)に配置されたエンコーダと、支持部材303の設置面303g(図8(a)参照)に設置されたスケールとによって検出される。
図17に示すように、照射光生成部21は、位置検出回路205を含んでいる。位置検出回路205は、エンコーダからの出力に基づいて、スクリーン108、109のZ軸方向の位置を検出する。画像処理回路201は、入力された映像信号および位置検出回路205からの信号を処理して、レーザ駆動回路202、ミラー駆動回路203およびスクリーン駆動回路204を制御する。
図18(a)は、エンコーダ410およびスケール332をY軸負方向に見た場合の模式図である。図18(b)は、センサ412a~412cおよびスケール332をX軸負方向に見た場合の模式図である。
図18(a)に示すように、エンコーダ410は、発光部411とセンサ412a、412b、412cを備える。発光部411は、スケール332に向けて光を出射する。発光部411から出射された光は、スケール332によって反射される。スケール332は、スクリーン108、109が駆動されることにより、Z軸方向に移動するため、発光部411から出射された光は、スケール332のX軸正側の面を走査する。
図18(b)に示すように、スケール332は、板状部材332aと反射部332b、332cを備える。板状部材332aは、光を透過する部材、たとえばガラスにより構成される。反射部332b、332cは、たとえば、光を反射する膜により構成される。反射部332bは、板状部材332aのX軸正側の面において、Z軸方向において等間隔に並ぶよう複数設けられている。反射部332cは、板状部材332aのX軸正側の面において、反射部332bの配置領域のZ軸方向の中央位置に1つだけ設けられている。反射部332b、332cは、Y軸方向において隣り合うように配置されている。
発光部411から出射された光は、板状部材332aのX軸正側の面において、照射領域413に照射される。照射領域413に照射された光のうち、照射領域413a、413b、413cにおいて反射された光は、それぞれ、センサ412a、412b、412cにより受光される。すなわち、照射領域413aが反射部332bに重なると、センサ412aが光を検出し、照射領域413bが反射部332bに重なると、センサ412bが光を検出し、照射領域413cが反射部332cに重なると、センサ412cが光を検出する。センサ412a~412cは、受光量に応じた信号を出力する。
ここで、照射領域413aの位置と照射領域413b位置は、Z軸方向に僅かにずれている。このため、スケール332がZ軸方向に移動する際に、センサ412a、412bにより受光される光の位相は、互いに異なる。したがって、センサ412a、412bの検出信号によれば、スケール332がZ軸正方向とZ軸負方向のいずれの方向い動いているのかを判断できる。また、センサ412cの検出信号によれば、照射領域413cが反射部332cに重なったかを判断できる。照射領域413cが反射部332cに重なると、スクリーン108、109がZ軸方向の駆動範囲の中心(原点位置)に位置付けられるよう、スケール332が橋部303fの設置面に設置されている。
図18(c)は、エンコーダ410の検出信号と、エンコーダ410の検出信号に基づいて生成される逓倍化信号とを模式的に示す図である。図18(c)では、便宜上、逓倍数が1に設定されている。ただし、逓倍数はこれに限られるものではなく、4倍等、1より大きな他の逓倍数であってもよい。
図18(c)に示すように、センサ412a、412bの検出信号の位相は、互いにずれている。センサ412a、412bの検出信号が、後述する逓倍回路221により逓倍化されることにより、パルス状の逓倍化信号が生成される。そして、後述するカウンタ222は、センサ412aの逓倍化信号が立ち上がるタイミングにおいて、センサ412bの逓倍化信号がハイであれば、スケール332(スクリーン108、109)がZ軸正方向に移動していると判定し、センサ412aの逓倍化信号が立ち上がるタイミングにおいて、センサ412bの逓倍化信号がローであれば、スケール332(スクリーン108、109)がZ軸負方向に移動していると判定する。
一方、センサ412cの検出信号は、スクリーン108、109が原点位置に位置付けられたときに立ち上がる。センサ412cの検出信号も、後述する逓倍回路221により逓倍化されることにより、パルス状の逓倍化信号が生成される。したがって、センサ412cの逓倍化信号によって、スケール332(スクリーン108、109)の原点位置が検出され得る。
図19は、実施形態2の回路構成を示す模式図である。図19には、図17の画像処理回路201に含まれる回路の他、レーザ駆動回路202、ミラー駆動回路203、スクリーン駆動回路204、位置検出回路205および駆動部300が示されている。
図19に示すように、画像処理回路201(図17参照)は、目標波形生成回路211と、差動回路212と、フィルタ213と、レーザ駆動信号生成回路214と、ミラー駆動信号生成回路215と、制御部231と、記憶部232と、を備えている。
目標波形生成回路211は、スクリーン108、109を目標位置に沿って駆動させるための目標波形を生成する。差動回路212は、目標波形生成回路211から出力される目標波形の信号と位置検出回路205から出力される駆動波形の信号との差分に応じた信号を出力する。フィルタ213は、差動回路212から出力された信号からノイズ成分を除去する。スクリーン駆動回路204は、フィルタ213から出力された信号に基づいて、駆動部300を駆動する。スクリーン駆動回路204からコイル341に電流が流される回路については、追って図21(a)を参照して説明する。
レーザ駆動信号生成回路214は、レーザ駆動回路202を駆動するための信号を映像信号に基づいて生成する。レーザ駆動信号生成回路214は、生成した駆動信号を、目標波形生成回路211から出力される目標波形に同期させて、レーザ駆動回路202に出力する。ミラー駆動信号生成回路215は、目標波形生成回路211から出力される目標波形に同期させて、ミラー駆動回路203を駆動するための信号をミラー駆動回路203に出力する。
位置検出回路205は、図18(a)に示したエンコーダ410の他、逓倍回路221と、カウンタ222と、を備える。
エンコーダ410は、上記のように、スクリーン108、109の動きに応じて移動するスケール332に光を照射し、センサ412a~412cの検出信号を出力する。逓倍回路221は、センサ412a~412cの検出信号をパルス状の2値化信号に変換し、さらに、2値化信号を所定の逓倍数で逓倍化して、各検出信号の逓倍化信号を出力する。カウンタ222は、逓倍化信号を計数し、計数結果をスクリーン108、109の実際の駆動位置を示す信号として、差動回路212に出力する。カウンタ222から経時的に出力される信号により、スクリーン108、109の駆動波形が構成される。この駆動波形が差動回路212に入力されることにより、スクリーン108、109のサーボ制御が行われる。差動回路212、フィルタ213、スクリーン駆動回路204および位置検出回路205によって、サーボ回路230が構成される。
制御部231は、逓倍回路221から出力される逓倍化信号等に基づいて、スクリーン108、109の移動に異常が生じているか否かを検出する。また、制御部231は、スクリーン駆動回路204に対して駆動信号のゲインの設定を行うとともに、サーボ回路230に対してフィードフォワード(FF)およびフィードバック(FB)の制御および停止を行う。また、制御部231は、レーザ駆動回路202とミラー駆動回路203の制御を行う。制御部231は、CPU等により構成され、記憶部232は、レジスタ等により構成される。異常検出の処理については、追って図21(a)~図25(b)を参照して説明する。
次に、駆動波形の生成およびカウンタ222のリセット処理について説明する。
図20(a)は、センサ412cの逓倍化信号がオンになるタイミングの前後を模式的に示すグラフである。
図20(a)に示す例では、時刻T1~T3において、センサ412aの逓倍化信号が立ち上がるタイミングで、センサ412bの逓倍化信号が立ち上がっているため、カウンタ222は、センサ412aの逓倍化信号が立ち上がるごとにカウント値を増加させている。そして、時刻T3において、センサ412cの逓倍化信号が立ち上がると、すなわちスクリーン108、109が原点位置に到達すると、カウンタ222は、リセットされて、カンウト値を0に設定する。
また、センサ412aの逓倍化信号が立ち上がるタイミングで、センサ412bの逓倍化信号が立ち下がっている場合、カウンタ222は、センサ412aの逓倍化信号が立ち上がるごとにカウント値を減少させる。この場合も、センサ412cの逓倍化信号が立ち上がると、カウンタ222は、リセットされて、カウント値を0に設定する。
カウンタ222は、こうして生成したカウント値の変動を、スクリーン108、109の実際の駆動位置を示す駆動波形として出力する。このとき、上記のようにセンサ412cの逓倍化信号が立ち上がったタイミングでカウント値がリセットされると、スクリーン108、109が原点位置に位置付けられたときにカウント値が0となるため、駆動波形がスクリーン108、109の位置を適正に表すようになる。
図20(b)は、駆動波形とセンサ412cの逓倍化信号との関係を模式的に示すグラフである。なお、図20(b)では、図9(a)に示した固定画像M3を表示するための期間(時刻t1~t2)が省略されている。
カウンタ222のリセットが行われない場合、スクリーン108、109の駆動に伴い、カウント値に誤差が累積し、たとえば、図20(b)の長鎖線の駆動波形に示すように、駆動波形にオフセットが生じる。この場合、駆動波形がオフセットした状態でサーボ回路230によるサーボ動作が実行されるため、スクリーン108、109は、オフセットした状態で往復移動を繰り返す。このため、画像30を適正な視距離の位置に表示できなくなる。
これに対し、本実施形態では、上述したように、センサ412cの逓倍化信号が立ち上がるタイミングでカウンタ222がリセットされる。これにより、図20(b)の実線の駆動波形に示すように、駆動波形のオフセットが解消され、カウンタ222が生成する駆動波形が適正な状態に維持される。したがって、カウンタ222が生成する駆動波形に基づいて、画像30を適正な視距離の位置に表示できる。
次に、スクリーン108、109の移動に異常が生じたことを検出する手法について説明する。
まず、駆動部300に対する電気信号の導通状態に基づいて、駆動部300の異常を検出する手法について説明する。ここでは、コイル341に掛かる電圧に基づいて、コイル341の断線等が検出される。
図21(a)は、スクリーン駆動回路204とコイル341とを接続する回路を模式的に示す図である。スクリーン駆動回路204と、コイル341と、抵抗216とが直列に接続されており、電圧計測回路217が、コイル341と抵抗216に対して並列に接続されている。
スクリーン駆動回路204は、画像表示装置20の初動制御の際に、スクリーン108、109が所定の振幅で光軸方向に移動するように、コイル341と抵抗216に電流を流す。電圧計測回路217は、コイル341と抵抗216との間の電圧を計測し、計測した電圧値をデジタル信号として制御部231に出力する。電圧計測回路217は、たとえば、コイル341と抵抗216との間の電圧を一定周期でサンプリングするサンプリング回路と、そのサンプリング値をデジタル信号に変換するADコンバータとによって構成される。
図21(b)は、画像表示装置20の初動制御時におけるスクリーン駆動回路204の出力電流および電圧計測回路217の計測電圧を模式的に示すグラフである。初動制御の際に、制御部231は、スクリーン108、109を、原点位置を挟んでZ軸方向に往復移動させる。このとき、スクリーン駆動回路204の出力電流および電圧計測回路217の計測電圧は、正弦波状になる。
ここで、コイル341に断線が生じている場合、または、被覆の摩耗などによりコイル341にレアショートが生じている場合、電圧計測回路217の計測電圧が低下する。したがって、画像表示装置20の初動制御時に、計測電圧の振幅が、予め設定した閾値Vaより小さい場合、コイル341に断線またはレアショートが生じていると分かる。具体的には、計測電圧が0である場合、コイル341が断線していると判断でき、計測電圧の振幅が0よりも大きく閾値Vaよりも小さい場合、コイル341にレアショートが生じていると判断できる。閾値Vaは、たとえば、コイル341が正常であるときの計測電圧の振幅の50%程度に設定される。
図22は、画像表示装置20が正常な場合の初動制御および通常制御における駆動波形を模式的に示す図である。
図22に示すように、初動制御が開始されると、フィードフォワード(FF)制御により、スクリーン駆動回路204に設定されるゲインが徐々に上昇され、駆動波形が正弦波状となるようスクリーン108、109が駆動される。すなわち、図19の回路において、サーボ回路230によりサーボが掛けられることなく、あらかじめ決められたゲインに応じてスクリーン駆動回路204が駆動され、スクリーン駆動回路204の駆動に応じてスクリーン108、109が往復移動する。
そして、ゲインが予め設定された目標値に到達すると、スクリーン108、109が一往復程度駆動され、その後、スクリーン108、109が開始位置(たとえば、図9(a)の初期位置Ps0に対応する位置)に移動されたことに応じて、画像表示装置20の通常制御が開始される。通常制御では、サーボ回路230がオンされ、フィードバック(FB)制御により、スクリーン108、109がサーボ制御される。すなわち、図19の回路において、位置検出回路205から差動回路212に駆動波形が入力され、スクリーン108、109が所望の駆動波形となるよう駆動される。
本実施形態では、図22に示した初動制御において、上述したコイル341の異常(断線またはレアショート)を検出する処理が行われる。
加えて、本実施形態では、この初動制御において、位置検出回路205の異常が、スクリーン108、109の移動における異常として検出される。ここでは、逓倍回路221から出力される逓倍化信号に基づいて、位置検出回路205の異常が検出される。
さらに、本実施形態では、通常制御において、スクリーン108、109の駆動波形と目標波形との間の差分の累積値に基づいて、スクリーン108、109の移動における異常が検出される。
以下、これらの異常検出処理について説明する。
図23は、画像表示装置20の初動制御における異常検出処理を示すフローチャートである。以下に示す異常検出処理は、制御部231によって実行される。
画像表示装置20が起動されると、光源101と走査部106の駆動はオフのままで、制御部231は、初動制御を開始する(S11)。これにより、図22を参照して説明したように、スクリーン駆動回路204に設定されるゲインが徐々に高められ、フィードフォワード(FF)制御によりスクリーン108、109が駆動される。また、位置検出回路205によるスクリーン108、109の位置検出が開始される。そして、スクリーン駆動回路204に設定されるゲインが目標値に到達すると(S12:YES)、制御部231は、スクリーン駆動回路204のゲインを目標値に維持したまま、スクリーン108、109を往復移動させる動作を所定時間継続させて、S13~S17の処理を実行する。以下、スクリーン108、109を往復移動させる動作が継続される期間を、「判定区間」と称する。
S13、S14において、制御部231は、判定区間における電圧計測回路217の計測電圧の振幅が0であるか否かを判定し、さらに、計測電圧の振幅が閾値Vaより小さいか否かを判定する。計測電圧の振幅は、たとえば、判定区間における計測電圧の最大値から最小値を減算して2で除算した値である。閾値Vaは、記憶部232にあらかじめ記憶されている。
図21(a)、(b)を参照して説明したように、計測電圧の振幅が0以上Va未満の場合(S13:YESまたはS14:YES)、コイル341に断線またはレアショートが生じていると考えられる。このため、制御部231は、S13、S14の少なくとも一方の判定がYESの場合、スクリーン駆動回路204を制御してスクリーン108、109の駆動をオフに設定する(S18)。これにより、後述のS19の処理が行われることなく図23の処理が終了され、画像30の表示動作が禁止される。他方、計測電圧が閾値Va以上である場合(S13:NO、S14:NO)、制御部231は、処理をS15に進めて、位置検出回路205の異常検出を行う。
S15、S16、S17において、制御部231は、判定区間において、センサ412a、412b、412cからの検出信号に基づく逓倍化信号が逓倍回路221から出力されたか否かを判定する。ここで、センサ412a、412b、412cの少なくとも1つに対する逓倍化信号が逓倍回路221から出力されていない場合(S15:NO、S16:NO、またはS17:NO)、スクリーン108、109の位置を検出するための構成に何らかの不具合が生じたと考えられる。
たとえば、エンコーダ410の発光部411またはセンサ412a、412b、412cに不具合が生じた場合や、スケール332に汚れの付着や破損、剥離が生じた場合、あるいは、逓倍回路221に回路的な不具合が生じた場合は、逓倍回路221から逓倍化信号が適正に出力されなくなる。そこで、制御部231は、何れかの逓倍化信号が逓倍回路221から出力されていない場合に(S15:NO、S16:NO、またはS17:NO)、スクリーン108、109の位置検出に異常が生じたとして、スクリーン駆動回路204を制御してスクリーン108、109の駆動をオフに設定する(S18)。この場合も、後述のS19の処理が行われることなく図23の処理が終了され、画像30の表示動作が禁止される。
他方、制御部231は、センサ412a、412b、412cのいずれの逓倍化信号も逓倍回路221から出力されている場合(S15:YES、S16:YES、S17:YES)、処理をS19に進める。
S19において、制御部231は、画像表示装置20の通常制御を開始させる。これにより、光源101と走査部106の駆動がオンされるとともに、サーボ回路230がオンされ、フィードバック(FB)制御により、スクリーン108、109がサーボ制御される。通常制御が開始されることにより、画像30の表示動作が行われる。
図24は、画像表示装置20の通常制御における異常検出処理を示すフローチャートである。
制御部231は、画像表示装置20の通常制御を開始した後、エラー累積値をクリアする(S21)。エラー累積値とは、スクリーン108、109の目標位置(目標波形上の位置)と実際の駆動位置(カウンタ222のカウント値)との差分の絶対値を累積した値である。この差分は、制御部231において、通常制御の進行に伴い一定周期で算出されて累積される。エラー累積値は、たとえば、記憶部232に記憶更新される。
具体的には、制御部231は、1フレームの画像表示が終了するまでの間(S22:NO)、所定時間が経過するごとに(S23:YES)、直前のエラー累積値に、駆動位置から目標位置を減算した値の絶対値(エラー絶対値)を加算する(S24)。制御部231は、この加算処理(S23、S24)を、1フレームの画像表示が終了するまで繰り返し行う。
図25(a)、(b)は、通常制御における駆動位置とエラー累積値を模式的に示すグラフである。図25(a)は、スクリーン108、109が正常に駆動されている状態を示しており、図25(b)は、スクリーン108、109の駆動に不具合が生じている状態を示している。
図25(a)に示すように、正常駆動時には、目標位置と駆動位置はほぼ同じであるため、1フレームの画像表示区間においてエラー累積値は低く抑えられている。これに対し、図25(b)に示すように、たとえば、通常動作時にも拘わらず、スクリーン108、109が中立位置付近に留まっている状態にあると、目標位置と駆動位置の差分が大きくなる。この場合は、1フレームの画像表示区間においてエラー累積値が大きく増加する。
図24に戻り、1フレームの画像表示が終了すると(S22:NO)、制御部231は、エラー累積値が閾値Eth以上であるか否かを判定する(S25)。閾値Ethは、図25(b)のようにスクリーン108、109の駆動に不具合が生じている場合にエラー累積値を適正に検出可能な値に設定される。閾値Ethは、記憶部232にあらかじめ記憶されている。エラー累積値が閾値Eth未満であると(S25:NO)、制御部231は、スクリーン108、109は正常に駆動されているとして、処理をS21に戻す。他方、エラー累積値が閾値Eth以上であると(S25:YES)、制御部231は、光源101、走査部106、およびスクリーン108、109の駆動をオフに設定して、画像30の表示動作を禁止させる(S26)。
<実施形態2の効果>
実施形態2によれば、以下の効果が奏される。
実施形態2によれば、以下の効果が奏される。
図23のS13~S17および図24のS25において、スクリーン108、109の移動に異常が生じているか否かが判定される。異常が生じている場合、S18、S26が実行され画像30の表示動作が禁止される。これにより、不適正な視距離の状態で画像30の表示動作が継続されることを回避できる。
制御部231は、駆動部300に対する電気信号の導通状態に基づいて、駆動部300の異常を検出し、駆動部300の異常を検出した場合に、画像30の表示動作を禁止する。具体的には、制御部231は、コイル341にかかる電圧が所定の閾値よりも小さい場合に、コイル341に断線やレアショート等の異常が生じているとして、画像30の表示動作を禁止する。これにより、不適正な視距離の状態で画像30の表示動作が継続されることを回避できる。
制御部231は、スクリーン108、109の動作時に位置検出回路205(位置検出部)における位置検出動作を監視して位置検出回路205の異常を検出し、位置検出回路205の異常を検出した場合に、画像30の表示動作を禁止する。具体的には、制御部231は、スクリーン108、109の動作時に、逓倍回路221から出力される逓倍化信号を監視し、逓倍化信号が立ち上がらない場合に、センサ412a、412b、412cまたは逓倍回路221に不具合が生じ、あるいは、スケール332に汚れの付着や剥離、破損などの不具合が生じているとして、画像30の表示動作を禁止する。これにより、不適正な処理の状態で画像30の表示動作が継続されることを回避できる。また、スクリーン108、109が暴走して駆動部300の機構部等に衝突することを回避できる。
制御部231は、画像30を表示するための初動制御において、スクリーン108、109の移動に異常が生じているか否かを検出する。これにより、画像30を表示するための通常動作を開始する前に異常を検出できるため、不適正な状態で画像30が表示されることを防ぐことができる。
スクリーン108、109がサーボ制御されると、通常、スクリーン108、109が目標波形に追従し、スクリーン108、109の駆動波形と目標波形との差分は小さくなる。しかしながら、スクリーン108、109の移動に異常が生じていると、目標波形に対するスクリーン108、109の追従が劣化し、駆動波形と目標波形との差分が大きくなることが起こり得る。本実施形態によれば、スクリーン108、109のサーボ制御時に、差分に基づいて画像30の表示動作が禁止される。具体的には、制御部231は、サーボ回路230によるスクリーン108、109のサーボ制御時に、スクリーン108、109の駆動波形と目標波形との差分の累積値が所定の閾値より大きい場合に画像30の表示動作を禁止する。これにより、不適正な視距離の状態で画像30の表示動作が継続されることを回避できる。
制御部231は、画像30を表示するための1フレーム区間における差分に基づいて、画像30の表示動作を禁止する。このように、フレームごとに異常の検出が行われると、スクリーン108、109の移動に異常が生じた場合に、迅速に画像30の表示動作を禁止できる。
<実施形態2の変更例>
以上、本発明の実施形態2について説明したが、本発明は、上記実施形態2に限定されるものではなく、また、本発明の適用例も、上記実施形態2の他に、種々の変更が可能である。
以上、本発明の実施形態2について説明したが、本発明は、上記実施形態2に限定されるものではなく、また、本発明の適用例も、上記実施形態2の他に、種々の変更が可能である。
たとえば、上記実施形態2において、駆動部300の異常は、必ずしも、コイル341にかかる電圧値により検出されなくともよく、駆動部300に対する電気信号の導通状態を監視可能な他のパラメータにより検出されてもよい。たとえば、コイル341に流れる電流に基づいて、コイル341に断線やレアショート等の異常が生じていることを検出してもよい。また、駆動部300の異常検出は、初期動作時に限らず、通常動作時に行われてもよい。
また、上記実施形態2において、スクリーン108、109は、コイル341に限らず、他の駆動機構によって駆動されてもよい。
また、上記実施形態2において、位置検出回路205(位置検出部)の異常は、必ずしも、逓倍化信号により検出されなくともよく、位置検出回路205(位置検出部)における位置検出動作を監視可能な他のパラメータにより検出されてもよい。たとえば、センサ412a、412b、412cから出力される検出信号によって位置検出回路205(位置検出部)の異常が検出されてもよく、あるいは、カウンタ222のカウント値が適正に変化しないことによって位置検出回路205(位置検出部)の異常が検出されてもよい。また、位置検出回路205の異常検出は、初期動作時に限らず、通常動作時に行われてもよい。
また、上記実施形態2では、図23に示した通常制御時の異常検出は、1フレームの画像表示区間におけるエラー累積値に基づいて行われたが、これに限らず、2以上の画像表示区間におけるエラー累積値に基づいて行われてもよい。また、通常動作時の異常検出は、エラー累積値に基づいて行われることに限らず、差分が所定の閾値を超えたか否かに基づいて行われてもよい。また、1フレームの画像表示区間において、差分が所定の閾値を超えた回数が一定数を超えた場合に、通常制御時に異常が生じていると判定されてもよい。
また、2つのスクリーン108、109が用いられなくてもよく、たとえば、1つのスクリーンのみが往復移動されて画像が生成されてもよい。
<実施形態3>
実施形態3では、レーザレーダ600が乗用車1の前側に搭載され、乗用車1の前方にラインビームB10が投射される。
実施形態3では、レーザレーダ600が乗用車1の前側に搭載され、乗用車1の前方にラインビームB10が投射される。
図26(a)は、レーザレーダ600の光学系および回路部の構成を示す図である。図26(b)は、投射光学系610の構成を示す斜視図である。図26(a)、(b)には、説明の便宜上、互いに直交するX、Y、Z軸が新たに付されている。これらX、Y、Z軸の方向は、上記実施形態1、2で用いたX、Y、Z軸の方向とは一致しない。
レーザレーダ600は、光学系の構成として、投射光学系610と受光光学系620を備える。投射光学系610は、一方向(X軸方向)に長いラインビームB10を生成する。また、投射光学系610は、生成したラインビームB10をその短辺方向(Y軸方向)に走査させる。受光光学系620は、投射光学系610から投射されたレーザ光の物体からの反射光を受光する。
投射光学系610は、発光ユニット611と、ファスト軸シリンドリカルレンズ612と、スロー軸シリンドリカルレンズ613と、光偏向器614と、を備える。また、受光光学系620は、受光レンズ621と受光素子622を備える。
発光ユニット611は、複数のレーザ光源611aが集積されて構成される。レーザ光源611aは、所定波長のレーザ光を出射する。実施形態3では、レーザレーダ600が車両に搭載されることが想定されている。このため、各レーザ光源611aの出射波長は、赤外の波長帯域(たとえば905nm)に設定される。
レーザ光源611aは、活性層がN型クラッド層とP型クラッド層に挟まれた構造となっている。N型クラッド層とP型クラッド層に電圧が印加されることにより、活性層の発光領域からレーザ光が出射される。発光領域は、活性層に平行な方向の幅が、活性層に垂直な方向の幅よりも広くなっている。活性層に垂直な方向の軸はファスト軸と称され、活性層に平行な方向の軸はスロー軸と称される。発光領域から出射されたレーザ光は、スロー軸方向よりもファスト軸方向の広がり角が大きい。このため、発光領域から出射されたビームの形状は、ファスト軸方向に長い楕円形状となる。
複数のレーザ光源611aは、それぞれ、スロー軸がX軸方向に平行となるように配置されている。また、複数のレーザ光源611aは、スロー軸に平行な方向(X軸方向)に並ぶように配置されている。発光ユニット611は、複数の発光領域がスロー軸方向に並ぶように形成された1つの半導体発光素子がベース611bに設置された構造となっている。ここで、当該半導体発光素子のうち、各発光領域からレーザ光を出射させる構造部分が、それぞれ、レーザ光源611aに対応する。
ファスト軸シリンドリカルレンズ612は、発光ユニット611の各レーザ光源611aから出射されたレーザ光をファスト軸方向に収束させて、ファスト軸方向のレーザ光の広がりを略平行な状態に調整する。スロー軸シリンドリカルレンズ613は、発光ユニット611の各レーザ光源611aから出射されたレーザ光をスロー軸方向に収束させて、スロー軸方向のレーザ光の広がりを調整する。
各レーザ光源611aから出射されたレーザ光は、スロー軸シリンドリカルレンズ613によってスロー軸方向に集光されて、光偏向器614のミラー614aに入射する。光偏向器614は、たとえば、圧電アクチュエータや静電アクチュエータ等を用いたMEMSミラーである。ミラー614aは、誘電体多層膜や金属膜等によって反射率が高められている。ミラー614aは、X軸に平行な回転軸R10について回動するように駆動される。また、光偏向器614には、ミラー614aの回動位置を検出するための位置検出部614b(図26(a)参照)が設けられている。
各レーザ光源611aからのレーザ光の集まりによってビームが構成される。ビームは、スロー軸シリンドリカルレンズ613によってX軸方向のみに集光されるため、ミラー614aで反射された後のビームは、X軸方向のみに広がる。こうして、X軸方向に広がるラインビームB10が生成される。
光偏向器614は、ミラー駆動回路633からの駆動信号によりミラー614aを駆動して、ミラー614aから反射したビームをY軸方向に走査させる。これにより、ラインビームB10が短手方向(Y軸方向)に走査される。
目標領域から反射したラインビームB10の反射光は、受光レンズ621によって、受光素子622の受光面に集光される。受光素子622は、たとえば、縦横に画素がマトリクスイメージ状に配置されたイメージセンサである。ここで、受光面のX軸方向の画素位置は、目標領域におけるX軸方向の位置に対応する。また、受光面のY軸方向の画素位置は、目標領域におけるY軸方向の位置に対応する。したがって、受光信号が生じた画素の位置により、目標領域のX軸方向およびY軸方向のどの位置に物体が存在するかを検出できる。
レーザレーダ600は、回路部の構成として、コントローラ631と、レーザ駆動回路632と、ミラー駆動回路633と、信号処理回路634と、を備える。
コントローラ631は、CPU(Central Processing Unit)等の演算処理回路や、ROM(Read Only Memory)、RAM(Random Access Memory)等の記憶媒体を備え、予め設定されたプログラムに従って各部を制御する。レーザ駆動回路632は、コントローラ631からの制御に応じて発光ユニット611の各レーザ光源611aをパルス発光させる。
ミラー駆動回路633は、コントローラ631からの制御に応じて光偏向器614を駆動する。光偏向器614は、ミラー614aを回転軸R10について回動させて、ラインビームB10の短辺方向にラインビームB10を走査させる。
信号処理回路634は、受光素子622の各画素の受光信号をコントローラ631に出力する。上記のように、コントローラ631は、受光信号が生じた画素の位置により、目標領域のX軸方向のどの位置に物体が存在するかを検出する。また、コントローラ631は、発光ユニット611をパルス発光させたタイミングと、受光素子622が目標領域からの反射光を受光したタイミング、すなわち、受光素子622から受光信号を受信したタイミングとの時間差に基づいて、目標領域に存在する物体までの距離を取得する。
こうして、コントローラ631は、発光ユニット611をパルス発光させつつ、光偏向器614によりラインビームB10を走査させることにより、目標領域における物体の有無を検出し、さらに、物体の位置および物体までの距離を計測する。これらの測定結果は、随時、乗用車1側の制御部に送信される。
図27(a)は、ダイナミックダンパー710が取り付けられる前の光偏向器614の構成を示す斜視図である。図27(b)は、組み立てが完了した光偏向器614の構成を示す斜視図である。
光偏向器614は、電磁力を利用してミラー614aを駆動する構成となっている。ハウジング701には、電磁駆動のための構成部材が設置されている。図27(a)、(b)には、互いに直交するx、y、z軸が付されている。x軸方向は、ハウジング701の短辺方向であり、y軸方向は、ハウジング701の長辺方向であり、z軸方向は、ハウジング701の上面に垂直な方向である。x軸方向は、図26(a)、(b)のX軸方向に一致する。
図27(a)に示すように、ハウジング701は、y軸方向に長い直方体形状を有し、剛性が高い金属材料からなっている。ハウジング701のz軸負側の面(底面)は、レーザレーダ600内の支持ベースに固定される。ハウジング701の上面には、平面視において長方形の凹部701aが形成されている。ハウジング701のx軸正側の面には、x軸正方向に突出した凸部701bが形成され、ハウジング701のx軸負側の面には、x軸負方向に突出した凸部701cが形成されている。ハウジング701の上面に、枠状の板バネ702が設置される。
板バネ702は、枠部702aと、支持部702bと、2つの梁部702cと、を有する。y軸方向の中間位置において、枠部702aからx軸方向に平行に延びるように、2つの梁部702cが形成され、これら梁部702cによって、枠部702aと支持部702bとが連結されている。支持部702bのy軸方向の中間位置において、2つの梁部702cが支持部702bに繋がっている。板バネ702は、可撓性の金属材料により一体形成されている。支持部702bの上面にミラー614aが接着剤等によって固定される。ミラー614aは、平面視において略正方形である。2つの梁部702cを繋いだ軸が、ミラー614aの回転軸R10となる。
コイル703は、長辺の中間位置が回転軸R10に一致するように、支持部702bの下面に設置される。コイル703は、平面視において長方形の角が丸められた形状に周回している。コイル703のy軸正側およびy軸負側の部分をそれぞれy軸方向に挟むように、磁石704および磁石705の組が2つ配置される。磁石704と磁石705は、ヨーク706に設置され、ヨーク706が、ハウジング701の凹部701aの底面に設置されている。磁石704、705は、磁極面における磁束密度が略均一の永久磁石である。
y軸正側の磁石704、705によって生じる磁界の向きと、y軸負側の磁石704、705によって生じる磁界の向きは、同じである。たとえば、y軸正側の磁石704は、N極がコイル703に対向し、y軸負側の磁石704は、S極がコイル703に対向する。また、y軸正側の磁石705は、S極がコイル703に対向し、y軸負側の磁石705は、N極がコイル703に対向する。このように磁極(磁界の向き)を調整することにより、コイル703に駆動信号(電流)が印加されると、回転軸R10周りの駆動力がコイル703に励起される。これにより、ミラー614aが、回転軸R10を軸として回動する。
実施形態3では、ミラー614aの駆動位置(回動位置)を検出するための位置検出部614b(図26(a)参照)が配置されている。位置検出部614bは、たとえば、支持部702bに設けられた磁石と、この磁石に対向するように設けられたホール素子とにより構成され得る。なお、位置検出部614bは、実施形態2のエンコーダ410と同様に、支持部702bに設けられたスケールに光を照射するとともに、スケールからの反射光を受光する光学センサにより構成されてもよい。ミラー614aの回動位置を検出可能な限りにおいて、位置検出部614bの構成は、適宜変更可能である。
図27(b)に示すように、ハウジング701の凸部701b、701cに対して、ダイナミックダンパー710が設置される。
ダイナミックダンパー710は、2つの質量部材711と、2つの板バネ712と、2つの板バネ713と、を備える。上記実施形態1、2と同様、質量部材711の質量と、板バネ712、713のバネ定数および粘性係数は、ターゲットの周波数における共振を制振するように調整される。
2つの板バネ712および2つの板バネ713は、y軸方向に延び、z軸方向の厚みが薄い金属材料からなっている。2つの板バネ712は、ハウジング701の凸部701bの上面と下面を挟むように、凸部701bの上面と下面にネジを用いて固定される。2つの板バネ713は、ハウジング701の凸部701cの上面と下面を挟むように、凸部701cの上面と下面にネジを用いて固定される。
2つの質量部材711は、実施形態2の変更例に示した質量部材520と同様の材料からなっている。y軸正側の質量部材711は、2つの板バネ712のy軸正側の端部および2つの板バネ713のy軸正側の端部において、2つの板バネ712および2つの板バネ713に固定される。y軸負側の質量部材711は、2つの板バネ712のy軸負側の端部および2つの板バネ713のy軸負側の端部において、2つの板バネ712および2つの板バネ713に固定される。このとき、2つの板バネ712は、質量部材711のx軸正側付近の上面と下面を挟むように、質量部材711の上面と下面にネジを用いて固定される。2つの板バネ713は、質量部材711のx軸負側付近の上面と下面を挟むように、質量部材711の上面と下面にネジを用いて固定される。こうして、光偏向器614の組み立てが完成する。
実施形態3では、回転軸R10についてミラー614aが一定周期で往復運動を行うように、光偏向器614が駆動される。また、ミラー614aが往路の範囲を回動する間に、複数回パルス発光されるように、各レーザ光源611aが駆動される。図26(a)に示すコントローラ631は、このように、ミラー614aの往路の範囲と、レーザ光源611aの駆動期間とが整合するように、レーザ駆動回路632とミラー駆動回路633とを制御する。
このとき、コントローラ631は、ミラー614aの往復運動を規定する目標波形に基づいて、レーザ駆動回路632とミラー駆動回路633とを制御する。具体的には、コントローラ631は、上記実施形態1、2と同様、位置検出部614bから出力される検出信号の波形(ミラー614aの駆動波形)と目標波形とが整合するように、ミラー駆動回路633によるミラー614aの駆動にサーボを掛ける。また、コントローラ631は、目標波形におけるミラー614aの往路の範囲において、各レーザ光源11aから所定回数パルス発光がなされるように、レーザ駆動回路632を駆動する。
<実施形態3の効果>
実施形態3によれば、以下の効果が奏される。
実施形態3によれば、以下の効果が奏される。
ダイナミックダンパー710の質量部材711は、板バネ712、713を介してハウジング701に設置されている。ミラー614aが回転軸R10について一定周期で往復運動を行うように光偏向器614が駆動されると、この駆動の反力により光偏向器614に上下方向(z軸方向)の振動が生じる。このとき、板バネ712、713が上下方向に撓みながら、2つの質量部材711が上下方向(Z軸方向)に揺動する。これにより、レーザレーダ600内に設置された光偏向器614の振動エネルギーが、ダイナミックダンパー710によって吸収される。
また、実施形態3によれば、板バネ712、713の長さや厚み、形状を調節することにより、ダイナミックダンパー710の共振周波数を容易に調節できる。よって、ダイナミックダンパー710の共振周波数を、目標の周波数帯により円滑に調節することができ、目標の制振作用をより効果的に達成することができる。
なお、実施形態3においても、実施形態2と同様、コントローラ631が、ミラー614aの回動に異常が生じている場合に、発光ユニット611による光の照射を禁止してもよい。また、コントローラ631は、ミラー614aの動作時に位置検出部614bにおける位置検出動作を監視して、位置検出部614bの異常を検出した場合に発光ユニット611による光の照射を禁止してもよい。また、コントローラ631は、初動制御において、ミラー614aの回動に異常が生じているか否かを検出してもよい。また、実施形態3においても、実施形態2と同様、コントローラ631は、ミラー614aのサーボ制御時に、ミラー614aの駆動波形と目標波形との差分に基づいて、発光ユニット611による光の照射を禁止してもよい。
<その他の変更例>
上記実施形態1、2では、本発明を乗用車1に搭載されるヘッドアップディスプレイに適用した例を示したが、本発明は、車載用に限らず、他の種類の画像表示装置や光学機器にも適用可能である。
上記実施形態1、2では、本発明を乗用車1に搭載されるヘッドアップディスプレイに適用した例を示したが、本発明は、車載用に限らず、他の種類の画像表示装置や光学機器にも適用可能である。
また、上記実施形態1、2において、画像表示装置20および照射光生成部21の構成は、図1(c)および図2に記載された構成に限られるものではなく、適宜、変更可能である。また、スクリーン108、109を移動させる駆動部300の構成も、実施形態に示した構成に限られるものではなく、適宜、変更可能である。たとえば、圧電式や静電式の駆動部でスクリーン108、109を駆動する構成であってもよい。
また、上記実施形態1、2では、移動対象の光学系としてスクリーン108、109の例を示したが、レンズやミラーなど他の光学系が移動対象であってもよい。また、上記実施形態3では、移動対象の光学系としてミラー614aの例を示したが、レンズなど他の光学系が移動対象であってもよい。
本発明の実施形態は、特許請求の範囲に示された技術的思想の範囲内において、適宜、種々の変更が可能である。
20 … 画像表示装置(光学機器)
22 … ミラー(光学系)
30 … 画像
101 … 光源
108、109 … スクリーン
205 … 位置検出回路(位置検出部)
217 … 電圧計測回路(電圧計測部)
221 … 逓倍回路
230 … サーボ回路
231 … 制御部
300 … 駆動部
301a … ホルダ
302 … 磁気カバー(非可動部)
306 … 支持ベース
307 … 磁気回路
308 … ダイナミックダンパー
308a … 質量部材
308b … ダンパー
309a … ダンパー
310 … 固定ベース
322、323、325、326 … 磁石
341 … コイル
410 … エンコーダ
500 … ダイナミックダンパー
611 発光ユニット(光源)
614 … 光偏向器(駆動部)
614a … ミラー(光学系、光学部材)
701 … ハウジング(非駆動部)
710 … ダイナミックダンパー
22 … ミラー(光学系)
30 … 画像
101 … 光源
108、109 … スクリーン
205 … 位置検出回路(位置検出部)
217 … 電圧計測回路(電圧計測部)
221 … 逓倍回路
230 … サーボ回路
231 … 制御部
300 … 駆動部
301a … ホルダ
302 … 磁気カバー(非可動部)
306 … 支持ベース
307 … 磁気回路
308 … ダイナミックダンパー
308a … 質量部材
308b … ダンパー
309a … ダンパー
310 … 固定ベース
322、323、325、326 … 磁石
341 … コイル
410 … エンコーダ
500 … ダイナミックダンパー
611 発光ユニット(光源)
614 … 光偏向器(駆動部)
614a … ミラー(光学系、光学部材)
701 … ハウジング(非駆動部)
710 … ダイナミックダンパー
Claims (20)
- 光源と、
前記光源からの光が照射されることにより画像が形成されるスクリーンと、
前記スクリーンからの光により虚像を生成する光学系と、
前記スクリーンを光軸方向に移動させる駆動部と、
前記駆動部を支持する支持ベースと、
前記支持ベース上の非可動部に設置されたダイナミックダンパーと、を備える、
ことを特徴とする画像表示装置。
- 請求項1に記載の画像表示装置において、
前記駆動部は、
前記スクリーンを保持するホルダと、
前記ホルダに装着されたコイルと、
前記支持ベースに設置され前記コイルの磁界を付与する磁気回路と、を備え、
前記磁気回路は、前記磁気回路の上面に載せられて前記磁気回路のヨークとして機能する磁気カバーを備え、
前記ダイナミックダンパーは、前記磁気カバーの上面に設置されている、
ことを特徴とする画像表示装置。
- 請求項2に記載の画像表示装置において、
前記磁気カバーの上面に複数の前記ダイナミックダンパーが設置されている、
ことを特徴とする画像表示装置。
- 請求項3に記載の画像表示装置において、
前記磁気カバーの中心に対して対称な位置にそれぞれ前記ダイナミックダンパーが設置されている、
ことを特徴とする画像表示装置。
- 請求項1ないし4の何れか一項に記載の画像表示装置において、
前記支持ベースは、ダンパーを介して固定ベースに支持されている、
ことを特徴とする画像表示装置。
- 請求項1ないし5の何れか一項に記載の画像表示装置において、
共振周波数が異なる複数の前記ダイナミックダンパーが、前記非可動部に設置されている、
ことを特徴とする画像表示装置。
- 請求項6に記載の画像表示装置において、
前記複数のダイナミックダンパーは、それぞれ、質量部材と、前記質量部材を前記非可動部に連結するダンパーとを備え、
前記各ダイナミックダンパーの前記質量部材の重さを均一に設定し、且つ、前記各ダイナミックダンパーの硬度を互いに相違させることにより、前記複数のダイナミックダンパーの共振周波数が互いに相違している、
ことを特徴とする画像表示装置。
- 光源と、
前記光源からの光が導かれる光学系と、
前記光学系を移動させる駆動部と、
前記駆動部を支持する支持ベースと、
前記支持ベース上の非可動部に設置されたダイナミックダンパーと、を備える、
ことを特徴とする光学機器。
- 請求項8に記載の光学機器において、
前記光学系は、前記光源からの光が照射されることにより画像が形成されるスクリーンを含み、
前記駆動部は、前記スクリーンを光軸方向に駆動する、
ことを特徴とする光学機器。
- 請求項8に記載の光学機器において、
前記光学系は、前記光源からの光が入射する光学部材を含み、
前記駆動部は、前記光学部材を駆動して前記光の進行方向を変化させる、
ことを特徴とする光学機器。
- 請求項10に記載の光学機器において、
前記光学部材は、ミラーであり、
前記駆動部は、前記ミラーを少なくとも1つの回動軸について回動させる、
ことを特徴とする光学機器。
- 請求項8ないし11の何れか一項に記載の光学機器において、
前記光学系の移動に異常が生じているか否かを検出し、前記異常を検出した場合に前記光の照射を禁止する制御部と、を備える、
ことを特徴とする光学機器。
- 請求項12に記載の光学機器において、
前記制御部は、前記駆動部に対する電気信号の導通状態に基づいて、前記駆動部の異常を検出し、前記駆動部の異常を検出した場合に前記光の照射を禁止する、
ことを特徴とする光学機器。
- 請求項13に記載の光学機器において、
前記駆動部は、コイルと磁石との間に生じる電磁力によって前記光学系を駆動させ、
前記コイルにかかる電圧を計測する電圧計測部を備え、
前記制御部は、前記光学系の動作時に前記電圧計測部から出力された電圧が所定の閾値より小さい場合に、前記駆動部の異常を検出する、
ことを特徴とする光学機器。
- 請求項12ないし14の何れか一項に記載の光学機器において、
前記光学系の移動位置を検出する位置検出部を備え、
前記制御部は、前記光学系の動作時に前記位置検出部における位置検出動作を監視して前記位置検出部の異常を検出し、前記位置検出部の異常を検出した場合に前記光の照射を禁止する、
ことを特徴とする光学機器。
- 請求項15に記載の光学機器において、
前記位置検出部は、前記光学系の位置を検出して検出信号を出力するエンコーダと、前記エンコーダから出力された検出信号を逓倍化する逓倍回路とを備え、
前記制御部は、前記逓倍回路から逓倍化信号が出力されない場合に、前記位置検出部の異常を検出する、
ことを特徴とする光学機器。
- 請求項12ないし16の何れか一項に記載の光学機器において、
前記制御部は、初動制御において、前記光学系の移動に異常が生じているか否かを検出する、
ことを特徴とする光学機器。
- 請求項12ないし17の何れか一項に記載の光学機器において、
前記光学系の移動位置を検出する位置検出部と、
前記位置検出部からの信号に基づいて前記駆動部による前記光学系の移動を目標波形に追従させるサーボ回路と、を備え、
前記制御部は、前記サーボ回路による前記光学系のサーボ制御時に、前記光学系の駆動波形と前記目標波形との差分に基づいて、前記光の照射を禁止する、
ことを特徴とする光学機器。
- 請求項18に記載の光学機器において、
前記制御部は、前記サーボ回路による前記光学系のサーボ制御時に、前記光学系の駆動波形と前記目標波形との差分の累積値が所定の閾値より大きい場合に前記光の照射を禁止する、
ことを特徴とする光学機器。
- 請求項18または19に記載の光学機器において、
前記制御部は、前記光学系を駆動するための1フレーム区間における前記差分に基づいて、前記光の照射を禁止する、
ことを特徴とする光学機器。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020528714A JP7190713B2 (ja) | 2018-07-05 | 2019-05-22 | 画像表示装置および光学機器 |
| US17/116,984 US11307426B2 (en) | 2018-07-05 | 2020-12-09 | Image display apparatus and optical device |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018-128328 | 2018-07-05 | ||
| JP2018128328 | 2018-07-05 | ||
| JP2018-183291 | 2018-09-28 | ||
| JP2018183291 | 2018-09-28 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/116,984 Continuation US11307426B2 (en) | 2018-07-05 | 2020-12-09 | Image display apparatus and optical device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020008750A1 true WO2020008750A1 (ja) | 2020-01-09 |
Family
ID=69059296
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/020353 WO2020008750A1 (ja) | 2018-07-05 | 2019-05-22 | 画像表示装置および光学機器 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11307426B2 (ja) |
| JP (1) | JP7190713B2 (ja) |
| WO (1) | WO2020008750A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023522309A (ja) * | 2020-03-31 | 2023-05-30 | 華為技術有限公司 | ディフューザフィルムのシフトを検出する装置及びヘッドアップディスプレイ |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021054222A1 (ja) * | 2019-09-17 | 2021-03-25 | 株式会社デンソー | 表示装置 |
| KR102700530B1 (ko) * | 2020-12-07 | 2024-08-28 | 엘지디스플레이 주식회사 | 이형 표시장치 |
| CN115657295B (zh) * | 2022-10-20 | 2023-09-19 | 东莞市维斗科技股份有限公司 | 一种可双轴向直线线性运动的振镜装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05300329A (ja) * | 1992-04-16 | 1993-11-12 | Fuji Xerox Co Ltd | 画像出力装置 |
| JPH0784203A (ja) * | 1993-06-29 | 1995-03-31 | Canon Inc | 光走査装置 |
| US20050156481A1 (en) * | 2004-01-20 | 2005-07-21 | Guangya Zhou | Optical scanning using vibratory diffraction gratings |
| JP2013068886A (ja) * | 2011-09-26 | 2013-04-18 | Nhk Media Technology Inc | 映像表示装置 |
| JP2016224258A (ja) * | 2015-05-29 | 2016-12-28 | キヤノン株式会社 | 光走査装置及び画像形成装置 |
| JP2017044805A (ja) * | 2015-08-25 | 2017-03-02 | パナソニックIpマネジメント株式会社 | 画像表示装置 |
Family Cites Families (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6384406B1 (en) * | 1999-08-05 | 2002-05-07 | Microvision, Inc. | Active tuning of a torsional resonant structure |
| US7920102B2 (en) * | 1999-12-15 | 2011-04-05 | Automotive Technologies International, Inc. | Vehicular heads-up display system |
| JP4223942B2 (ja) * | 2003-12-26 | 2009-02-12 | 矢崎総業株式会社 | ヘッドアップディスプレイ装置 |
| US7280282B2 (en) * | 2005-03-09 | 2007-10-09 | Yazaki Corporation | Display apparatus for vehicle |
| KR100754190B1 (ko) | 2005-11-03 | 2007-09-03 | 삼성전자주식회사 | 레이저 디스플레이 장치 |
| US7611165B2 (en) * | 2006-06-23 | 2009-11-03 | Delphi Technologies, Inc. | Adjustable steering column assembly having an attached instrument cluster |
| US8519324B2 (en) * | 2006-09-15 | 2013-08-27 | Nec Corporation | Laser projector for projecting and displaying an image based on the raster scanning of a laser beam |
| KR100830752B1 (ko) * | 2007-04-19 | 2008-05-19 | 한국철도공사 | 차량용 스크린 장치 |
| JP2009150947A (ja) | 2007-12-19 | 2009-07-09 | Hitachi Ltd | 車両用ヘッドアップディスプレイ装置 |
| US8106885B2 (en) * | 2007-12-19 | 2012-01-31 | Research In Motion Limited | Input mechanism for handheld electronic communication device |
| JP2010070066A (ja) * | 2008-09-18 | 2010-04-02 | Toshiba Corp | ヘッドアップディスプレイ |
| FR2962815B1 (fr) * | 2010-07-16 | 2013-06-21 | Delphi Tech Inc | Dispositif d'affichage tete haute ajustable |
| CN103384780B (zh) * | 2010-12-29 | 2016-03-30 | 新港公司 | 可调谐式振动阻尼器以及制造和调谐方法 |
| WO2012131011A2 (en) * | 2011-03-29 | 2012-10-04 | Katholieke Universiteit Leuven | Vibro-acoustic attenuation or reduced energy transmission |
| JP5464219B2 (ja) * | 2012-02-03 | 2014-04-09 | 株式会社デンソー | 車両用ヘッドアップディスプレイ装置 |
| US9291816B2 (en) * | 2012-03-23 | 2016-03-22 | Panasonic intellectual property Management co., Ltd | Scanning mirror and scanning image display device |
| WO2013177587A2 (en) | 2012-05-25 | 2013-11-28 | Immerz Inc. | Haptic interface for portable electronic device |
| JP6107047B2 (ja) * | 2012-10-24 | 2017-04-05 | 日本精機株式会社 | ヘッドアップディスプレイ装置 |
| JP6044838B2 (ja) * | 2013-04-04 | 2016-12-14 | 日本精機株式会社 | ヘッドアップディスプレイ装置 |
| US10018243B1 (en) * | 2013-12-20 | 2018-07-10 | Steve L. Gilbert | Vibration isolation of electronics and/or components |
| JP6455268B2 (ja) * | 2015-03-23 | 2019-01-23 | 日本精機株式会社 | ヘッドアップディスプレイ装置 |
| US9975350B2 (en) | 2015-05-29 | 2018-05-22 | Canon Kabushiki Kaisha | Light scanning apparatus |
| US9835859B2 (en) * | 2015-08-25 | 2017-12-05 | Panasonic Intellectual Property Management Co., Ltd. | Image display device |
| JP6254988B2 (ja) * | 2015-10-21 | 2017-12-27 | 矢崎総業株式会社 | ヘッドアップディスプレイ装置 |
| DE102017004148A1 (de) * | 2016-05-06 | 2017-11-09 | Marquardt Gmbh | Bedienvorrichtung, insbesondere in der Art eines Touchpads |
| WO2018135462A1 (ja) * | 2017-01-17 | 2018-07-26 | 日本精機株式会社 | 表示装置 |
| JP6820501B2 (ja) | 2017-02-20 | 2021-01-27 | パナソニックIpマネジメント株式会社 | 画像表示装置 |
| JP6846638B2 (ja) * | 2017-06-12 | 2021-03-24 | パナソニックIpマネジメント株式会社 | 画像表示装置 |
| US10444501B2 (en) * | 2017-06-20 | 2019-10-15 | Panasonic Intellectual Property Management Co., Ltd. | Image display device |
| KR102352563B1 (ko) * | 2017-08-04 | 2022-01-17 | 엘지디스플레이 주식회사 | 표시장치 |
| CN110068925B (zh) * | 2018-01-23 | 2022-12-06 | 松下知识产权经营株式会社 | 图像显示装置 |
| JP7331834B2 (ja) * | 2018-03-21 | 2023-08-23 | 日本精機株式会社 | ヘッドアップディスプレイ |
-
2019
- 2019-05-22 JP JP2020528714A patent/JP7190713B2/ja active Active
- 2019-05-22 WO PCT/JP2019/020353 patent/WO2020008750A1/ja active Application Filing
-
2020
- 2020-12-09 US US17/116,984 patent/US11307426B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05300329A (ja) * | 1992-04-16 | 1993-11-12 | Fuji Xerox Co Ltd | 画像出力装置 |
| JPH0784203A (ja) * | 1993-06-29 | 1995-03-31 | Canon Inc | 光走査装置 |
| US20050156481A1 (en) * | 2004-01-20 | 2005-07-21 | Guangya Zhou | Optical scanning using vibratory diffraction gratings |
| JP2013068886A (ja) * | 2011-09-26 | 2013-04-18 | Nhk Media Technology Inc | 映像表示装置 |
| JP2016224258A (ja) * | 2015-05-29 | 2016-12-28 | キヤノン株式会社 | 光走査装置及び画像形成装置 |
| JP2017044805A (ja) * | 2015-08-25 | 2017-03-02 | パナソニックIpマネジメント株式会社 | 画像表示装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023522309A (ja) * | 2020-03-31 | 2023-05-30 | 華為技術有限公司 | ディフューザフィルムのシフトを検出する装置及びヘッドアップディスプレイ |
| JP7460793B2 (ja) | 2020-03-31 | 2024-04-02 | 華為技術有限公司 | ディフューザフィルムのシフトを検出する装置及びヘッドアップディスプレイ |
Also Published As
| Publication number | Publication date |
|---|---|
| US11307426B2 (en) | 2022-04-19 |
| JPWO2020008750A1 (ja) | 2021-08-05 |
| US20210088797A1 (en) | 2021-03-25 |
| JP7190713B2 (ja) | 2022-12-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2020008750A1 (ja) | 画像表示装置および光学機器 | |
| KR100595519B1 (ko) | 디스플레이 시스템의 화질 열화 완화용 전자력 구동기 | |
| JP5624475B2 (ja) | 画像表示装置 | |
| US10031336B2 (en) | Image display device | |
| KR20100053465A (ko) | 확산판 구동 장치 및 투사형 화상 표시 장치 | |
| US9885866B2 (en) | Mirror system and projection device | |
| JP6015564B2 (ja) | 光走査装置 | |
| US10444501B2 (en) | Image display device | |
| EP3191893B1 (en) | Screen vibration for reducing speckle | |
| JP6820501B2 (ja) | 画像表示装置 | |
| JP6846638B2 (ja) | 画像表示装置 | |
| JP2017536561A5 (ja) | ||
| WO2006117867A1 (ja) | 磁気駆動アクチュエータ | |
| JP6876932B2 (ja) | 画像表示装置 | |
| JP4245580B2 (ja) | ミラー制御回路および光空間伝送装置 | |
| JP7281638B2 (ja) | 光スキャナユニットおよび光学機器 | |
| CN101592784A (zh) | 一种消相干装置及方法 | |
| JP2019159066A (ja) | 投射装置、移動体および投射装置の設置方法 | |
| JP2013025187A (ja) | 画像形成装置 | |
| JP7249545B2 (ja) | 画像表示装置および駆動装置 | |
| CN101960357A (zh) | 振荡器装置、光学偏转器和使用光学偏转器的图像形成设备 | |
| JP2016011975A (ja) | プロジェクタおよびヘッドアップディスプレイ | |
| WO2024142774A1 (ja) | 測定ユニット、灯具ユニット | |
| KR101941493B1 (ko) | 레이저 프로젝터용 디퓨저 | |
| JP2016012064A (ja) | 光源装置、投写型表示装置および拡散方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19829980 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2020528714 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 19829980 Country of ref document: EP Kind code of ref document: A1 |