WO2020004448A1 - 飛行体制御装置 - Google Patents
飛行体制御装置 Download PDFInfo
- Publication number
- WO2020004448A1 WO2020004448A1 PCT/JP2019/025328 JP2019025328W WO2020004448A1 WO 2020004448 A1 WO2020004448 A1 WO 2020004448A1 JP 2019025328 W JP2019025328 W JP 2019025328W WO 2020004448 A1 WO2020004448 A1 WO 2020004448A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- flying object
- coordinate axis
- axis
- flight
- coordinate
- Prior art date
Links
- 230000008859 change Effects 0.000 claims abstract description 16
- 238000000034 method Methods 0.000 claims abstract description 16
- RZVHIXYEVGDQDX-UHFFFAOYSA-N 9,10-anthraquinone Chemical group C1=CC=C2C(=O)C3=CC=CC=C3C(=O)C2=C1 RZVHIXYEVGDQDX-UHFFFAOYSA-N 0.000 claims description 27
- 238000012937 correction Methods 0.000 claims description 6
- 238000003384 imaging method Methods 0.000 description 16
- 238000012545 processing Methods 0.000 description 13
- 238000010586 diagram Methods 0.000 description 10
- 238000012986 modification Methods 0.000 description 10
- 230000004048 modification Effects 0.000 description 10
- 230000006870 function Effects 0.000 description 7
- 238000005259 measurement Methods 0.000 description 7
- 230000008569 process Effects 0.000 description 7
- 238000004891 communication Methods 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 4
- 239000003550 marker Substances 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 239000006249 magnetic particle Substances 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000003672 processing method Methods 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft, e.g. air-traffic control [ATC]
- G08G5/0004—Transmission of traffic-related information to or from an aircraft
- G08G5/0013—Transmission of traffic-related information to or from an aircraft with a ground station
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/10—Simultaneous control of position or course in three dimensions
- G05D1/101—Simultaneous control of position or course in three dimensions specially adapted for aircraft
- G05D1/106—Change initiated in response to external conditions, e.g. avoidance of elevated terrain or of no-fly zones
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C13/00—Control systems or transmitting systems for actuating flying-control surfaces, lift-increasing flaps, air brakes, or spoilers
- B64C13/02—Initiating means
- B64C13/16—Initiating means actuated automatically, e.g. responsive to gust detectors
- B64C13/18—Initiating means actuated automatically, e.g. responsive to gust detectors using automatic pilot
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/86—Combinations of radar systems with non-radar systems, e.g. sonar, direction finder
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/48—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/10—Simultaneous control of position or course in three dimensions
- G05D1/101—Simultaneous control of position or course in three dimensions specially adapted for aircraft
- G05D1/102—Simultaneous control of position or course in three dimensions specially adapted for aircraft specially adapted for vertical take-off of aircraft
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/606—Compensating for or utilising external environmental conditions, e.g. wind or water currents
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft, e.g. air-traffic control [ATC]
- G08G5/0017—Arrangements for implementing traffic-related aircraft activities, e.g. arrangements for generating, displaying, acquiring or managing traffic information
- G08G5/0026—Arrangements for implementing traffic-related aircraft activities, e.g. arrangements for generating, displaying, acquiring or managing traffic information located on the ground
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft, e.g. air-traffic control [ATC]
- G08G5/0047—Navigation or guidance aids for a single aircraft
- G08G5/0052—Navigation or guidance aids for a single aircraft for cruising
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft, e.g. air-traffic control [ATC]
- G08G5/0047—Navigation or guidance aids for a single aircraft
- G08G5/0069—Navigation or guidance aids for a single aircraft specially adapted for an unmanned aircraft
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft, e.g. air-traffic control [ATC]
- G08G5/04—Anti-collision systems
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft, e.g. air-traffic control [ATC]
- G08G5/04—Anti-collision systems
- G08G5/045—Navigation or guidance aids, e.g. determination of anti-collision manoeuvers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/10—Rotorcrafts
- B64U10/13—Flying platforms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
- B64U2101/30—UAVs specially adapted for particular uses or applications for imaging, photography or videography
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2201/00—UAVs characterised by their flight controls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2201/00—UAVs characterised by their flight controls
- B64U2201/10—UAVs characterised by their flight controls autonomous, i.e. by navigating independently from ground or air stations, e.g. by using inertial navigation systems [INS]
- B64U2201/104—UAVs characterised by their flight controls autonomous, i.e. by navigating independently from ground or air stations, e.g. by using inertial navigation systems [INS] using satellite radio beacon positioning systems, e.g. GPS
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U50/00—Propulsion; Power supply
- B64U50/10—Propulsion
- B64U50/19—Propulsion using electrically powered motors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/14—Receivers specially adapted for specific applications
- G01S19/15—Aircraft landing systems
Definitions
- the present invention relates to a technique for specifying the position of a flying object.
- drones One type of use of unmanned aerial vehicles called drones is to fly a drone equipped with a camera along the surface of a structure such as a high-rise building or bridge, and image the surface to damage or degrade the structure.
- a mechanism has been considered to check the condition of the vehicle.
- the position of a drone is determined based on radio signals (referred to as GPS signals) transmitted from a plurality of GPS (Global Positioning System) satellites.
- GPS signals Global Positioning System
- the GPS signal reception environment is poor below a bridge, and the drone is poor.
- Patent Document 1 describes that a marker for position estimation and a transmitter of a GPS signal are provided under a bridge that is difficult to receive a GPS signal, and the current position of the drone is accurately specified using these. ing.
- an object of the present invention is to perform position control of an aircraft with respect to a structure under a situation where it is difficult to perform positioning based on a radio signal transmitted from a satellite.
- the present invention sets a plurality of coordinate axes serving as references for specifying the position of a flying object in a flight space including a space in which positioning accuracy based on a radio signal transmitted from a satellite is equal to or less than a threshold value.
- a setting unit in the space, using a different method for each of the plurality of coordinate axes, a position specifying unit that specifies the position of the flying object, and based on the position specified by the position specifying unit, And a flight control unit for controlling the flight of the flying object.
- the plurality of coordinate axes include a first coordinate axis that intersects with a structure and a second coordinate axis that does not intersect with the structure, and the position specifying unit continuously connects the position of the flying object on the first coordinate axis.
- the position of the flying object on the second coordinate axis is specified less frequently than the specific frequency of the position on the first coordinate axis, or on the second coordinate axis. The position of the flying object may not be specified.
- the flight control unit at a time when at least one position of the flying object on the second coordinate axis is identified by the position identification unit, the second position of the flying object by the flying object based on the at least one position While controlling the flight in the axial direction of the coordinate axis, during the period in which the position of the flying object on the second coordinate axis is not specified by the position specifying unit, the position is specified immediately before the beginning of the period in the at least one position.
- the flight of the flying object in the axial direction of the second coordinate axis may be controlled based on the position of the flying object on the second coordinate axis.
- the position specifying unit may specify the position of the flying object on the first coordinate axis based on a distance from the flying object to the structure.
- the position specifying unit may specify the position of the flying object on the second coordinate axis based on a change in the shape of the structure in an axial direction of the second coordinate axis.
- a position correction unit for performing correction may be provided.
- the upper limit of the period in which the flight control unit controls the flight of the flying object based on the position specified immediately before the beginning may be different depending on the coordinate axes included in the plurality of coordinate axes.
- the present invention it is possible to control the position of an air vehicle with respect to a structure under a situation where it is difficult to perform positioning based on a radio signal transmitted from a satellite.
- FIG. 1 is a diagram illustrating an example of a configuration of a flight control system 1.
- FIG. 2 is a diagram illustrating an example of an appearance of a flying object 10.
- FIG. 2 is a diagram illustrating an electrical hardware configuration of the flying object.
- FIG. 2 is a diagram illustrating an example of a functional configuration of the flying object 10. It is a perspective view which illustrates the relationship between a structure and a coordinate axis. It is a top view which shows an example of the structure of the lower surface of a structure. It is a figure which illustrates the relationship between a structure and a coordinate axis when it sees from the direction parallel to the X-axis. It is a figure which illustrates the relationship between a structure and a coordinate axis when it sees from the direction parallel to a Y-axis. It is a figure showing an example of the functional composition of flight object 10 concerning a modification.
- FIG. 1 is a diagram illustrating an example of a configuration of a flight control system 1.
- the flight control system 1 includes one or more flying objects 10 and a server device 20.
- the flying object 10 and the server device 20 can communicate with each other via a network.
- the flying object 10 captures a structure such as a bridge, for example, and stores image data indicating the captured image in association with its own position and date and time when the image was captured (hereinafter, referred to as an imaging process). I do.
- the flying object 10 functions as a flying object control device that controls its own flight.
- the server device 20 is a computer including a processor and a memory.
- the server device 20 stores the flight plan and flight results of the flying object 10.
- the flight plan and the actual flight result include the identification information of the flying object 10 and the flight status of the flying object 10.
- the flight status of the flight plan includes a position at which the flying object 10 is scheduled to fly, and a date and time at which each of the positions is to be reached.
- the flight status of the actual flight results includes the position where the flight body 10 actually flew according to the flight plan, and the date and time when each position was reached.
- the server device 20 notifies the flying body 10 of the flight plan, and the flying body 10 flies according to the flight plan.
- the server device 20 stores the identification information, the position, and the date and time as the flight history notified from the flying object 10.
- the server device 20 determines whether the position and the date and time are within the range of the flight plan determined for the flying object 10 of the identification information, and stores the determination result.
- the flight plan includes three-dimensional shape data of a structure to be subjected to processing (for example, imaging processing) performed by the flight of the flying object 10.
- the shape data is data indicating each position on the surface of the structure when, for example, the latitude, longitude, and altitude at a certain position on the earth are set as references (referred to as reference positions).
- the shape data is a set of X, Y, and Z coordinates indicating each position on the surface of the structure when the reference position is set as the origin of the XYZ coordinate space.
- the reference position is desirably a space that is not a GPS reception difficult space described later, that is, a position in a space where radio signals transmitted from a plurality of GPS satellites can be favorably received.
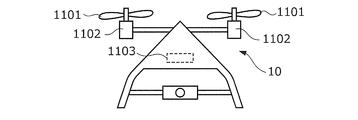
- FIG. 2 is a view showing an example of the appearance of the flying object 10.
- the flying object 10 is, for example, a so-called drone, and includes a propeller 1101, a driving device 1102, and a battery 1103.
- the propeller 1101 rotates about an axis.
- the driving device 1102 applies power to the propeller 1101 to rotate it.
- the driving device 1102 includes, for example, a motor and a transmission mechanism that transmits the power of the motor to the propeller 1101.
- the battery 1103 supplies power to each part of the flying object 10 including the driving device 1102.
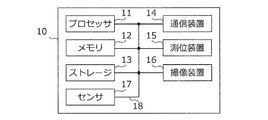
- FIG. 3 is a diagram showing an electrical hardware configuration of the flying object 10.
- the flying object 10 is physically configured as a computer device including a processor 11, a memory 12, a storage 13, a communication device 14, a positioning device 15, an imaging device 16, a sensor 17, a bus 18, and the like.
- the term “apparatus” can be read as a circuit, a device, a unit, or the like.
- the processor 11 controls, for example, an entire computer by operating an operating system.
- the processor 11 may be configured by a central processing unit (CPU: Central Processing Unit) including an interface with a peripheral device, a control device, an arithmetic device, a register, and the like.
- CPU Central Processing Unit
- the processor 11 reads a program (program code), a software module, and data from the storage 13 and / or the communication device 14 to the memory 12, and executes various processes according to these.
- a program program code
- a software module software module
- data data from the storage 13 and / or the communication device 14 to the memory 12, and executes various processes according to these.
- the program a program that causes a computer to execute at least a part of the operation of the flying object 10 is used.
- Various processes executed in the flying object 10 may be executed by one processor 11, or may be executed simultaneously or sequentially by two or more processors 11.
- Processor 11 may be implemented with one or more chips. Note that the program may be transmitted from a network via a telecommunication line.
- the memory 12 is a computer-readable recording medium, and includes at least one of a ROM (Read Only Memory), an EPROM (Erasable Programmable ROM), an EEPROM (Electrically Erasable Programmable ROM), and a RAM (Random Access Memory). May be done.
- the memory 12 may be called a register, a cache, a main memory (main storage device), or the like.
- the memory 12 can store a program (program code), a software module, and the like that can be executed to execute the flight control method according to the embodiment of the present invention.
- the storage 13 is a computer-readable recording medium, for example, an optical disk such as a CD-ROM (Compact @ Disc @ ROM), a hard disk drive, a flexible disk, a magneto-optical disk (for example, a compact disk, a digital versatile disk, a Blu-ray). (Registered trademark) disk, a smart card, a flash memory (eg, card, stick, key drive), a floppy (registered trademark) disk, a magnetic strip, or the like.
- the storage 13 may be called an auxiliary storage device.
- the communication device 14 is hardware (transmission / reception device) for performing communication between computers via a wired and / or wireless network, and is also referred to as, for example, a network device, a network controller, a network card, a communication module, or the like.
- the positioning device 15 measures the position of the flying object 10.
- the positioning device 15 is, for example, a GPS receiver, and measures the current position of the flying object 10 based on, for example, radio signals (GPS signals) received from a plurality of GPS satellites.
- GPS signals radio signals
- the imaging device 16 captures an image around the flying object 10.
- the imaging device 16 is, for example, a camera, and captures an image by forming an image on an imaging element using an optical system.
- the imaging direction and imaging range of the imaging device 16 may be remotely controllable.
- the sensor 17 transmits a radio wave (for example, an infrared wave) of a predetermined frequency and receives the reflected wave.
- the processor 11 calculates a distance from the flying object 10 to a structure as a reflector based on the transmission / reception interval of the radio waves and the speed of the radio waves. That is, the sensor 17 and the processor 11 function as a distance measuring unit from the flying object 10 to the structure.
- the devices such as the processor 11 and the memory 12 described above are connected by a bus 18 for communicating information.
- the bus 18 may be constituted by a single bus, or may be constituted by different buses between the devices.
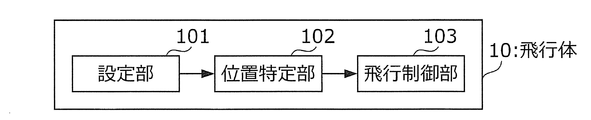
- FIG. 4 is a diagram showing an example of a functional configuration of the flying object 10. As shown in FIG. In the flying object 10, these functions are realized by the processor 11 reading a program or the like into the memory 12 and executing the processing.
- the setting unit 101 determines a position of the flying object 10 in a flight space including a space in which positioning accuracy based on the GPS signal is equal to or less than a predetermined threshold (hereinafter, referred to as a GPS signal reception difficult space).
- a GPS signal reception difficult space is a space in which the positioning device 15 is prevented from receiving GPS signals, such as a space under a bridge or a lower space of a group of high-rise buildings adjacent to each other.
- FIG. 5 is a perspective view illustrating the relationship between the structure and the coordinate axes.
- a bridge B over a river R is assumed as a structure.
- the flying object 10 flies as a flight space in a three-dimensional XYZ coordinate space whose origin is a certain reference position. This flight space includes a GPS signal reception difficult space A.
- the flying object 10 flies along a predetermined flight path r according to the X, Y, and Z axes in the flight plan.
- the flight path r is a path that passes below the bridge B, and the flying object 10 performs an imaging process of imaging the lower surface of the bridge B while flying along the flight path r.
- the Z axis which is a vertical axis, is a first coordinate axis that intersects the bridge B.
- the X and Y axes which are horizontal and orthogonal to each other, are second coordinate axes that do not intersect with the bridge B.
- the flight path r is a GPS signal that flies from a space where GPS signals can be received in a direction parallel to the X-axis direction (X-axis positive direction) and is close to one end of the bridge B, as indicated by a broken line in the figure.
- the vehicle enters the difficult reception space A, and then flies in a direction parallel to the Y-axis direction (positive Y-axis direction) in the GPS signal reception difficult space A to a position near the other end of the bridge B, and The flight path flies in a direction parallel to the X-axis direction (X-axis negative direction) from the signal reception difficult space A to the space where GPS signals can be received.
- the Z coordinate of the flight route r is a certain value between the lower surface of the bridge B and the water surface of the river R. That is, the flight path r is a flight path that draws three sides of a rectangle on a horizontal plane.
- the position specifying unit 102 specifies the position of the flying object 10 in the GPS signal reception difficult space by using a different method for each coordinate axis. Specifically, the position specifying unit 102 specifies the position of the flying object 10 on the Z axis (first coordinate axis) in the GPS signal reception difficult space based on the distance from the flying object 10 to the bridge B. . This distance is a distance measured by the sensor 17 when the position of the flying object 10 on the Z axis is specified. Note that the position specifying unit 102 may specify the position of the flying object 10 on the Z axis (first coordinate axis) based on the distance from the flying object 10 to the water surface of the river R in exceptional cases. Will be described later.
- the position specifying unit 102 specifies the position of the flying object 10 on the X and Y axes (second coordinate axes) based on the change in the shape of the bridge B in the X and Y axis directions.
- the change in the shape of the bridge B in the X- and Y-axis directions refers to the distance from the vehicle 10 to the bridge B measured a plurality of times by the sensor 17 until the position of the vehicle 10 on the X and Y axes is specified.
- the change of the shape of the bridge B in the X- and Y-axis directions refers to the distance from the vehicle 10 to the bridge B measured a plurality of times by the sensor 17 until the position of the vehicle 10 on the X and Y axes is specified.
- FIG. 6 is a plan view showing an example of the structure of the lower surface of bridge B, and shows an example of the structure when bridge B is viewed from below.
- a plurality of beam members B0 extending in the Y-axis direction are provided along the side surface of the bridge B, and at predetermined intervals in the Y-axis direction, Are provided.
- a plurality of brace members B2 interposed between the plurality of beam members B1 are provided.
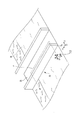
- FIG. 7 is a diagram illustrating the relationship between the structure and the coordinate axes when viewed from a direction parallel to the X-axis, and is a cross-sectional view taken along a line a-a ′ of FIG. FIG.
- FIGS. 7 and 8 are diagram illustrating the relationship between the structure and the coordinate axes when viewed from a direction parallel to the Y axis, and is a cross-sectional view taken along the line b-b 'of FIG.
- these beam members B0, B1 and brace members B2 all protrude downward from the lower surface of the bridge B.
- the protrusion amount is different for the beam member B0, the beam member B1, and the brace member B2.
- the X, Y, and Z coordinate values indicating the shape of the lower surface of the bridge B as shown in FIGS. 6 to 8 are stored in advance in the server device 20 as the shape data of the structure. Therefore, the position specifying unit 102 can specify the position of the flying object 10 on the Z axis based on the shape data and the distance from the flying object 10 to the lower surface of the bridge B located vertically above.
- the flight route r is a GPS signal reception space near one end of the bridge B which flies in a direction parallel to the X-axis direction (X-axis positive direction) from a space where GPS signals can be received.
- the vehicle enters the difficult space A, and then flies in a direction parallel to the Y-axis direction (positive Y-axis direction) in the difficult-to-receive GPS signal space A to a position near the other end of the bridge B.
- This is a flight path that flies in a direction parallel to the X-axis direction (X-axis negative direction) from the reception difficult space A to a space where GPS signals can be received.
- the position identification unit 102 determines the position of the flying object 10 on the Z axis (first coordinate axis) in the vertical direction below the flying object 10. May be specified based on the measured distance to the water surface of the river R (measured distance by the sensor 17).
- the position specifying unit 102 specifies the position of the flying object 10 on the Z axis based on the known shape data of the beam member B0 and the measured distance.
- the flight control unit 103 controls the flight of the flying object 10 by driving the driving device 1102 so that the difference between the specified position on the Z axis and the flight plan approaches zero. In the case of this example, the flight control unit 103 performs control such that the difference between the specified position and the flight plan approaches 0, and then drives the driving device 1102 so that the position in the Z-axis direction becomes constant. Perform a level flight.
- the position specifying unit 102 determines the position of the flying object 10 on the X-axis by changing the shape of the bridge B in the X-axis direction in the previous flight history (from the flying object 10 to the lower surface of the bridge B vertically above the bridge B). (Change in distance). Specifically, in a space where GPS signals can be received, the measurement distance (measurement distance by the sensor 17) from the flying object 10 to the lower surface of the bridge B located vertically above is infinite and constant, so that position identification is performed.
- the unit 102 cannot specify the position of the vehicle 10 on the X axis based on the change in the measured distance, but can specify the position of the vehicle 10 on the X axis based on the GPS signal.
- the flying object 10 moves down the bridge B along the flight path r, the reception environment of the GPS signal deteriorates, but when the flying object 10 reaches a position below the side surface of the bridge B, the flying object 10 The distance from 10 to the beam member B0 of the bridge B vertically above is measured.
- the position identifying unit 102 Locate the location.
- the flight control unit 103 controls the flight of the flying object 10 by driving the driving device 1102 so that the difference between the specified position on the X axis and the flight plan approaches zero. In the case of this example, the flight control unit 103 performs control such that the difference between the specified position and the flight plan approaches 0, and flies at a constant speed along the X-axis direction.
- the position specifying unit 102 determines the position of the flying object 10 on the Y-axis by changing the shape of the bridge B in the Y-axis axial direction in the flight history up to that time (the lower surface of the bridge B vertically above the flying object 10 from the flying body 10). (Change in distance to). Specifically, in a space where GPS signals can be received, the measurement distance (measurement distance by the sensor 17) from the flying object 10 to the lower surface of the bridge B located vertically above is infinite and constant, so that position identification is performed. The unit 102 cannot specify the position of the vehicle 10 on the Y axis based on the change in the measured distance, but can specify the position of the vehicle 10 on the Y axis based on the GPS signal.
- the position specifying unit 102 determines the X-axis based on the position of the aircraft 10 on the Z-axis specified at that time, the known shape data of the beam member B0, and the measured distance.
- the position of the flying vehicle 10 above can be specified, since the shape of the beam member B0 is not a shape that changes in the Y-axis direction, even at this time, the beam member B0 is positioned on the Y-axis based on the change in the measurement distance. The position of the flying object 10 cannot be specified. When the flying object 10 further flies along the X-axis direction from this state, next, the distance from the flying object 10 to the brace member B2 of the bridge B located vertically above is measured.
- the position specifying unit 102 calculates the shape data of the known beam member B0 and the brace member B2, the time difference from the time when the distance to the beam member B0 is calculated to the time when the distance to the brace member B2 is calculated, and Based on the velocity, the position of the flying object 10 on the Y axis can be specified. Thereafter, when the flying body 10 changes its traveling direction and flies along the Y-axis direction, the distance from the flying body 10 to the beam member B1 of the bridge B located vertically above is measured. At this time, based on the position of the flying object 10 on the Z axis specified at that time, the known shape data of the beam member B1, and the measured distance, the position identifying unit 102 Can be specified.
- the sensor 17 measures the distance from the flying object 10 to the structure using a very short period as a sampling period. That is, the position specifying unit 102 continuously specifies the position of the flying object 10 on the Z axis in this sampling cycle. On the other hand, the position specifying unit 102 specifies the position of the flying object 10 on the X axis and the Y axis with a frequency lower than the frequency of the position specification on the Z axis. For example, in FIG. 7, there is no change in the shape of the lower surface of the bridge B between the beam member B1 and the brace member B2 located at adjacent positions on the Y axis. The position of the flying object 10 on the axis cannot be specified.
- the flight control unit 103 controls the flight of the flying object 10 based on the position specified by the position specifying unit 102. More specifically, when the position of the flying object 10 on the Z-axis is specified by the position specifying unit 102, the flight control unit 103 controls the flight of the flying object 10 in the Z-axis direction based on the position. I do. For example, the flight control unit 103 controls the driving device 1102 to maintain the position (altitude) in the Z-axis direction so that the flying object 10 flies in the horizontal direction according to the flight plan.
- the flight control unit 103 uses the X and Y axes (second coordinate axes) of the flying object 10 based on the position. ) Control flight in direction. For example, the flight control unit 103 controls the driving device 1102 to maintain or correct the position in the X and Y axis directions so that the flying object 10 flies according to the flight plan.
- the flight control unit 103 specifies the X and Y axes specified immediately before the beginning of the period.
- the current position is estimated on the basis of the position of the flying object 10 above and the current flight speed and flight direction expected from the driving state of the driving device 1102 of the flying object 10, and the driving device 1102 is controlled to control the flight plan and the flight plan.
- the position in the X and Y axis directions is maintained or corrected so as to match the current position.
- the imaging device 16 of the flying object 10 captures a moving image or a still image at a predetermined timing while the flying object 10 is flying.
- the image data is stored in the flying object 10 or the server device 20 in a state where the image data is associated with the position of the flying object 10 at the time of imaging and the date and time.
- Modifications The present invention is not limited to the embodiments described above.
- the embodiment described above may be modified as follows. Further, the following two or more modified examples may be combined and implemented.
- Modification 1 In the example of FIG. 7, a change in the shape of the structure appears at a position where the beam member B1 and the brace member B2 are located.
- the position specifying unit 102 detects the position of the flying object 10 on the X For example, when the distance in the X-axis or Y-axis direction that does not intersect with the structure in the flight path is short, the position of the flying object 10 on the X-axis or Y-axis is specified by the sensor 17. You may fly without.
- Modification 2 In the example of FIG. 7, since there is no change in the shape of the bridge B between the beam member B1 and the brace member B2 located at adjacent positions on the Y axis, the position specifying unit 102 He had not identified the position of body 10. As shown in FIG. 9, based on the position of the flying object 10 on the coordinate axis specified by the position specifying unit 102, a position for correcting the position of the flying object 10 on the coordinate axis during the period until the position is specified.
- a correction unit 104 may be provided. Specifically, the position correction unit 104 calculates the position of the flying vehicle 10 on the specified X and Y axes and the flight speed and the flying direction expected from the driving state of the driving device 1102 of the flying vehicle 10 until then. The past flight position is corrected based on the history. In this case, the position may be corrected in consideration of environmental information such as a wind speed at the time of a past flight.
- Modification 3 In the example of FIG. 7, since there is no change in the shape of the bridge B between the beam member B1 and the brace member B2 located at adjacent positions on the Y axis, the position specifying unit 102 The position of the flying object 10 could not be specified.
- the flight control unit 103 sets an upper limit in a period during which the position of the flying object 10 cannot be specified (hereinafter, referred to as an indeterminate position period). Processing may be performed.
- This position indefinite period may be different depending on the coordinate axis. For example, a position indefinite period T1 is set for the Y-axis where precise position identification is required, and another position indefinite period T2 is set for the X-axis where precise position identification is not required as much as the Y-axis. (T1 ⁇ T2).
- the processing performed by the flying object 10 on the structure is not limited to the imaging processing, and may be any processing.
- the way of setting the coordinate axes is not limited to the example of the embodiment, and may not be a rectangular coordinate system such as an XYZ coordinate space.
- the flying object 10 functions as the flight control device, but the server device 20 may function as the flight control device to control the flying object 10.
- the position specifying unit 102 may exceptionally specify the position of the flying object 10 on the Z-axis based on the distance to the surface of the river. If the shape is unique according to the position, the position of the flying object 10 with respect to the structure may be specified from the result of the flying object 10 imaging the structure and performing image recognition.
- Modification 7 For example, in the case of a structure like a tunnel, when the longitudinal direction of the tunnel is the Y-axis direction, the horizontal direction perpendicular to the Y-axis is the X-axis direction, and the vertical direction is the Z-axis direction, A sensor 17 that measures a distance to a structure (side surface of the inner wall of the tunnel) in the X-axis direction as viewed from the body 10 and may measure a distance to a structure (the ceiling surface of the inner wall of the tunnel) in the Z-axis direction may be provided. .
- the inner wall surface of the tunnel similarly to the bridge of the embodiment, has a shape such that there is some change in at least one of the X, Y, and Z axes.
- the position specifying unit 102 determines the distance to the structure (the tunnel inner wall ceiling surface) in the Z-axis direction and / or the distance to the structure (the tunnel inner wall side surface) in the X-axis direction. And the position on the X and Y axes is the distance to the structure (the tunnel inner wall ceiling surface) in the Z axis direction and / or the distance to the structure (the tunnel inner wall side surface) in the X axis direction. Identify based on changes in As described above, the position specifying unit 102 may specify the position of the flying object 10 based on the distance in a plurality of directions from the flying object 10 to the structure.
- each functional block may be realized by one device physically and / or logically coupled, or two or more devices physically and / or logically separated from each other directly and / or indirectly. (For example, wired and / or wireless) and may be implemented by these multiple devices.
- at least a part of the functions of the server device 20 may be mounted on the flying object 10.
- at least a part of the functions of the flying object 10 may be implemented in the server device 20.
- Each aspect / embodiment described in this specification includes LTE (Long Term Evolution), LTE-A (LTE-Advanced), SUPER 3G, IMT-Advanced, 4G, 5G, FRA (Future Radio Access), W-CDMA.
- LTE Long Term Evolution
- LTE-A Long Term Evolution-Advanced
- SUPER 3G IMT-Advanced
- 4G 5G
- FRA Full Radio Access
- W-CDMA Wideband
- GSM registered trademark
- CDMA2000 Code Division Multiple Access 2000
- UMB User Mobile Broadband
- IEEE 802.11 Wi-Fi
- IEEE 802.16 WiMAX
- IEEE 802.20 UWB (Ultra-WideBand
- the present invention may be applied to a system using Bluetooth (registered trademark), another appropriate system, and / or a next-generation system extended based on the system.
- each aspect / embodiment described in this specification may be interchanged as long as there is no inconsistency.
- the methods described herein present elements of various steps in an exemplary order, and are not limited to the specific order presented.
- Each aspect / embodiment described in the present specification may be used alone, may be used in combination, or may be used by switching with execution.
- the notification of the predetermined information (for example, the notification of “X”) is not limited to explicitly performed, and is performed implicitly (for example, not performing the notification of the predetermined information). Is also good.
- system and “network” are used interchangeably.
- the information, parameters, and the like described in this specification may be represented by an absolute value, a relative value from a predetermined value, or another corresponding information.
- the radio resource may be indicated by an index.
- determining may encompass a wide variety of operations. “Judgment” and “decision” are, for example, judgment (judging), calculation (computing), processing (processing), deriving (investigating), and investigating (looking up) (for example, a table). , A search in a database or another data structure), ascertaining a thing as “determined”, “determined”, and the like. Also, “determining” and “determining” include receiving (eg, receiving information), transmitting (eg, transmitting information), input (input), output (output), and access. (Accessing) (for example, accessing data in the memory) may be regarded as “determined” or “determined”.
- judgment and “decision” mean that resolving, selecting, selecting, establishing, establishing, comparing, etc. are regarded as “judgment” and “determined”. May be included. In other words, “determination” and “determination” may include deeming any operation as “determination” and “determined”.
- the present invention may be provided as a flight control method or an information processing method including steps of processing performed in the flight control system 1 or the server device 20. Further, the present invention may be provided as a program executed in the flying object 10 or the server device 20. Such a program may be provided in a form recorded on a recording medium such as an optical disk, or may be provided in a form such as being downloaded to a computer via a network such as the Internet and installed and made available. It is possible.
- Software, instructions, etc. may be transmitted and received via transmission media.
- the software may use a wired technology such as coaxial cable, fiber optic cable, twisted pair and digital subscriber line (DSL) and / or a web site, server, or other using wireless technology such as infrared, wireless and microwave.
- a wired technology such as coaxial cable, fiber optic cable, twisted pair and digital subscriber line (DSL) and / or a web site, server, or other using wireless technology such as infrared, wireless and microwave.
- the information, signals, etc. described herein may be represented using any of a variety of different technologies.
- data, instructions, commands, information, signals, bits, symbols, chips, etc. that can be referred to throughout the above description are not limited to voltages, currents, electromagnetic waves, magnetic or magnetic particles, optical or photons, or any of these. May be represented by a combination of
- channels and / or symbols may be signals.
- the signal may be a message.
- the component carrier (CC) may be called a carrier frequency, a cell, or the like.
- references to elements using designations such as "first,” “second,” etc., as used herein, does not generally limit the quantity or order of those elements. These designations may be used herein as a convenient way to distinguish between two or more elements. Thus, references to first and second elements do not mean that only two elements may be employed therein, or that the first element must precede the second element in some way.
- Flight control system 10: flying object
- 20 server device
- 11 processor
- 12 memory
- 13 storage
- 14 communication device
- 15 positioning device
- 16 imaging device
- 17 sensor
- 18 bus
- 101 setting unit
- 102 position specifying unit
- 103 flight control unit
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Computer Networks & Wireless Communication (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Navigation (AREA)
Abstract
衛星から発信される無線信号に基づいて測位を行うことが困難な状況下において、構造物に対する飛行体の位置制御を行う。 位置特定部(102)は、GPS信号受信困難空間において、各々の座標軸でそれぞれ異なる方法を用いて、飛行体(10)の位置を特定する。具体的には、位置特定部(102)は、GPS信号受信困難空間において、Z軸(第1の座標軸)上の飛行体(10)の位置については、飛行体(10)から構造物までの距離(位置特定時に測定された距離)に基づいて特定し、X,Y軸(第2の座標軸)上の飛行体(10)の位置については、X,Y軸(第2の座標軸)の軸方向における構造物の形状の変化(位置特定時までに複数回測定された飛行体(10)から橋Bまでの距離の履歴)に基づいて特定する。
Description
本発明は、飛行体の位置を特定するための技術に関する。
ドローンと呼ばれる無人飛行体の利用形態の1つとして、カメラを搭載したドローンを高層建築物や橋等の構造物の表面に沿って飛行させ、その表面を撮像して構造物における損傷や劣化等の状態を点検する、という仕組みが考えられている。一般に、ドローンの位置特定は、複数のGPS(Global Positioning System)衛星からそれぞれ発信される無線信号(GPS信号という)に基づいて行われるが、例えば橋の下方ではGPS信号の受信環境が悪く、ドローンの位置特定が困難となる。この場合、ドローンで撮像した箇所が構造物のどの位置であるかを特定することが難しくなる。例えば特許文献1には、GPS信号を受信しづらい橋の下に、位置推定のためのマーカーやGPS信号の発信機を設け、これらを用いてドローンの現在位置を正確に特定することが記載されている。
このような背景に鑑み、本発明は、衛星から発信される無線信号に基づいて測位を行うことが困難な状況下において、構造物に対する飛行体の位置制御を行うことを目的とする。
上記課題を解決するため、本発明は、衛星から発信される無線信号に基づく測位の精度が閾値以下の空間を含む飛行空間に、飛行体の位置を特定する基準となる複数の座標軸を設定する設定部と、前記空間において、前記複数の座標軸の各々でそれぞれ異なる方法を用いて、前記飛行体の位置を特定する位置特定部と、前記位置特定部により特定された前記位置に基づいて、前記飛行体の飛行を制御する飛行制御部とを備えることを特徴とする飛行体制御装置を提供する。
前記複数の座標軸は、構造物と交差する第1の座標軸及び前記構造物と交差しない第2の座標軸を含み、前記位置特定部は、前記第1の座標軸上の前記飛行体の前記位置を連続的に特定する一方、前記第2の座標軸上の前記飛行体の前記位置を、前記第1の座標軸における前記位置の特定の頻度よりも少ない頻度で特定するか、又は前記第2の座標軸上の前記飛行体の前記位置を特定しないようにしてもよい。
前記飛行制御部は、前記位置特定部により前記第2の座標軸上の前記飛行体の少なくとも1の位置が特定された時点においては、当該少なくとも1の位置に基づいて前記飛行体による前記第2の座標軸の軸方向の飛行を制御する一方、前記位置特定部によって前記第2の座標軸上の前記飛行体の位置が特定されない期間においては、前記少なくとも1の位置のうちその期間の始期直前に特定された前記第2の座標軸上の前記飛行体の位置に基づいて、前記飛行体による前記第2の座標軸の軸方向の飛行を制御するようにしてもよい。
前記位置特定部は、前記第1の座標軸上の前記飛行体の前記位置については、前記飛行体から前記構造物までの距離に基づいて特定するようにしてもよい。
前記位置特定部は、前記第2の座標軸上の前記飛行体の前記位置については、当該第2の座標軸の軸方向における前記構造物の形状の変化に基づいて特定するようにしてもよい。
前記位置特定部によって特定された前記複数の座標軸に含まれる座標軸上の前記飛行体の前記位置に基づいて、当該位置が特定されるまでの期間における前記飛行体の当該座標軸上の他の位置を補正する位置補正部を備えるようにしてもよい。
前記飛行制御部が前記始期直前に特定された前記位置に基づいて前記飛行体の飛行を制御する前記期間の上限は、前記複数の座標軸に含まれる座標軸に応じて異なるようにしてもよい。
本発明によれば、衛星から発信される無線信号に基づいて測位を行うことが困難な状況下において、構造物に対する飛行体の位置制御を行うことができる。
構成
図1は、飛行制御システム1の構成の一例を示す図である。飛行制御システム1は、1以上の飛行体10と、サーバ装置20とを備える。飛行体10とサーバ装置20とはネットワークを介して相互に通信可能である。飛行体10は、例えば橋等の構造物を撮像し、撮像した画像を示す画像データとその撮像を行ったときの自身の位置及び日時とを対応付けて記憶する処理(以下、撮像処理という)を行う。本実施形態において、飛行体10は、自身の飛行を制御する飛行体制御装置として機能する。
図1は、飛行制御システム1の構成の一例を示す図である。飛行制御システム1は、1以上の飛行体10と、サーバ装置20とを備える。飛行体10とサーバ装置20とはネットワークを介して相互に通信可能である。飛行体10は、例えば橋等の構造物を撮像し、撮像した画像を示す画像データとその撮像を行ったときの自身の位置及び日時とを対応付けて記憶する処理(以下、撮像処理という)を行う。本実施形態において、飛行体10は、自身の飛行を制御する飛行体制御装置として機能する。
サーバ装置20は、プロセッサやメモリを備えたコンピュータである。サーバ装置20は、飛行体10の飛行計画及び飛行実績を記憶している。飛行計画及び飛行実績には、飛行体10の識別情報とその飛行体10の飛行状況が含まれる。飛行計画の飛行状況には、飛行体10の飛行が予定されている位置と、その各位置に到達する予定の日時とが含まれている。飛行実績の飛行状況には、飛行体10の飛行計画に従って実際に飛行した位置と、その各位置に到達した日時とが含まれている。サーバ装置20は、飛行計画を飛行体10に通知し、飛行体10はその飛行計画に従って飛行を行う。サーバ装置20は、飛行体10から通知される飛行履歴としての識別情報、位置及び日時を記憶する。サーバ装置20は、その位置及び日時が、その識別情報の飛行体10について決められている飛行計画の範囲内であるかどうかを判断し、その判断結果を記憶する。
また、飛行計画には、飛行体10の飛行により行われる処理(例えば撮像処理)の対象となる構造物の3次元の形状データが含まれる。形状データは、例えば地球上の或る位置における緯度、経度及び高度を基準(基準位置という)としたときの、構造物表面の各位置を示すデータである。例えば、この形状データは、上記の基準位置をXYZ座標空間の原点としたときの、構造物表面の各位置を示すX,Y,Z座標の集合である。なお、基準位置は、後述するGPS受信困難空間ではない空間、つまり、複数のGPS衛星から発信された無線信号を良好に受信可能な空間内にある位置が望ましい。
図2は、飛行体10の外観の一例を示す図である。飛行体10は、例えばドローンと呼ばれるものであり、プロペラ1101と、駆動装置1102と、バッテリー1103とを備える。
プロペラ1101は、軸を中心に回転する。プロペラ1101が回転することにより、飛行体10が飛行する。駆動装置1102は、プロペラ1101に動力を与えて回転させる。駆動装置1102は、例えばモーターとモーターの動力をプロペラ1101に伝達する伝達機構とを含む。バッテリー1103は、駆動装置1102を含む飛行体10の各部に電力を供給する。
図3は、飛行体10の電気的なハードウェア構成を示す図である。飛行体10は、物理的には、プロセッサ11、メモリ12、ストレージ13、通信装置14、測位装置15、撮像装置16、センサ17、バス18などを含むコンピュータ装置として構成されている。なお、以下の説明では、「装置」という文言は、回路、デバイス、ユニットなどに読み替えることができる。
プロセッサ11は、例えば、オペレーティングシステムを動作させてコンピュータ全体を制御する。プロセッサ11は、周辺装置とのインターフェース、制御装置、演算装置、レジスタなどを含む中央処理装置(CPU:Central Processing Unit)で構成されてもよい。
また、プロセッサ11は、プログラム(プログラムコード)、ソフトウェアモジュールやデータを、ストレージ13及び/又は通信装置14からメモリ12に読み出し、これらに従って各種の処理を実行する。プログラムとしては、飛行体10の動作の少なくとも一部をコンピュータに実行させるプログラムが用いられる。飛行体10において実行される各種処理は、1つのプロセッサ11により実行されてもよいし、2以上のプロセッサ11により同時又は逐次に実行されてもよい。プロセッサ11は、1以上のチップで実装されてもよい。なお、プログラムは、電気通信回線を介してネットワークから送信されてもよい。
メモリ12は、コンピュータ読み取り可能な記録媒体であり、例えば、ROM(Read Only Memory)、EPROM(Erasable Programmable ROM)、EEPROM(Electrically Erasable Programmable ROM)、RAM(Random Access Memory)などの少なくとも1つで構成されてもよい。メモリ12は、レジスタ、キャッシュ、メインメモリ(主記憶装置)などと呼ばれてもよい。メモリ12は、本発明の一実施の形態に係る飛行制御方法を実施するために実行可能なプログラム(プログラムコード)、ソフトウェアモジュールなどを保存することができる。
ストレージ13は、コンピュータ読み取り可能な記録媒体であり、例えば、CD-ROM(Compact Disc ROM)などの光ディスク、ハードディスクドライブ、フレキシブルディスク、光磁気ディスク(例えば、コンパクトディスク、デジタル多用途ディスク、Blu-ray(登録商標)ディスク)、スマートカード、フラッシュメモリ(例えば、カード、スティック、キードライブ)、フロッピー(登録商標)ディスク、磁気ストリップなどの少なくとも1つで構成されてもよい。ストレージ13は、補助記憶装置と呼ばれてもよい。
通信装置14は、有線及び/又は無線ネットワークを介してコンピュータ間の通信を行うためのハードウェア(送受信デバイス)であり、例えばネットワークデバイス、ネットワークコントローラ、ネットワークカード、通信モジュールなどともいう。
測位装置15は、飛行体10の位置を測定する。測位装置15は、例えばGPS受信機であり、例えば複数のGPS衛星から受信した無線信号(GPS信号)に基づいて飛行体10の現在位置を測定する。
撮像装置16は、飛行体10の周囲の画像を撮影する。撮像装置16は、例えばカメラであり、光学系を用いて撮像素子上に像を結ばせることにより、画像を撮影する。撮像装置16の撮像方向や撮像範囲は遠隔から制御可能であってもよい。
センサ17は、所定周波数の無線波(例えば赤外波)を送信し、その反射波を受信する。プロセッサ11は、この無線波の送受信間隔及び無線波の速度に基づいて、飛行体10から反射体としての構造物までの距離を算出する。つまり、センサ17及びプロセッサ11は、飛行体10から構造物までの距離測定手段として機能する。
上述したプロセッサ11やメモリ12などの各装置は、情報を通信するためのバス18で接続される。バス18は、単一のバスで構成されてもよいし、装置間で異なるバスで構成されてもよい。
図4は、飛行体10の機能構成の一例を示す図である。飛行体10において、プロセッサ11がプログラム等をメモリ12に読み出して処理を実行することにより、これらの機能が実現される。
設定部101は、GPS信号に基づく測位の精度が予め決められた閾値以下の空間(以下、GPS信号受信困難空間という)を含む飛行空間に、飛行体10の位置を特定する基準となる複数の座標軸を設定する。GPS信号受信困難空間は、例えば橋の下方空間や、互いに隣り合う複数の高層建築物群の下部空間等のように、測位装置15によるGPS信号の受信が妨げられる空間である。
ここで、図5は、構造物と座標軸との関係を例示する斜視図である。ここでは、構造物として、川Rに架かる橋Bを想定している。この例では、橋Bの下方であって、GPS信号の受信が橋Bによって妨げられる空間Aが、GPS信号受信困難空間である。飛行体10は、或る基準位置を原点Oとする3次元のXYZ座標空間を飛行空間として飛行する。この飛行空間には、GPS信号受信困難空間Aが含まれている。飛行体10は、飛行計画においてX,Y,Z軸に従って予め決められた飛行経路rを飛行する。この飛行経路rは、橋Bの下方を通過する経路であり、飛行体10はこの飛行経路rに沿って飛行しながら橋Bの下面を撮像する撮像処理を行う。X,Y,Z軸のうち、鉛直方向の軸であるZ軸は橋Bと交差する第1の座標軸である。また、それぞれ水平で互いに直交する軸であるX,Y軸は、橋Bと交差しない第2の座標軸である。飛行経路rは、図中の破線で示すように、GPS信号を受信可能な空間からX軸方向に平行な方向(X軸正方向)に飛行して橋Bの一方の端部に近いGPS信号受信困難空間Aに進入し、次に、GPS信号受信困難空間A内において橋Bの他方の端部に近い位置までY軸方向(Y軸正方向)に平行な方向に飛行し、そして、GPS信号受信困難空間AからGPS信号を受信可能な空間までX軸方向に平行な方向(X軸負方向)に飛行する、というような飛行経路である。飛行経路rのZ座標は、橋Bの下面から川Rの水面までの間の或る一定値である。つまり、飛行経路rは、水平面上において、長方形の3辺を描くような飛行経路である。
位置特定部102は、GPS信号受信困難空間において、各々の座標軸でそれぞれ異なる方法を用いて、飛行体10の位置を特定する。具体的には、位置特定部102は、GPS信号受信困難空間において、Z軸(第1の座標軸)上の飛行体10の位置については、飛行体10から橋Bまでの距離に基づいて特定する。この距離は、Z軸上の飛行体10の位置特定時においてセンサ17により測定された距離である。なお、位置特定部102は、Z軸(第1の座標軸)上の飛行体10の位置について、例外的に飛行体10から川Rの水面までの距離に基づいて特定する場合があるが、詳しくは後述する。また、位置特定部102は、X,Y軸(第2の座標軸)上の飛行体10の位置については、X,Y軸の軸方向における橋Bの形状の変化に基づいて特定する。X,Y軸の軸方向における橋Bの形状の変化とは、X,Y軸上の飛行体10の位置特定時までに、センサ17により複数回測定された飛行体10から橋Bまでの距離の変化に相当する。
ここで、図6は、橋Bの下面の構造の一例を示す平面図であり、橋Bの下方から上方を見たときの構造の一例を示している。図に示すように、橋Bの下面においては、橋Bの側面に沿ってY軸方向に延びる複数の梁部材B0が設けられているとともに、Y軸方向において所定間隔を空けて、X軸方向に延びる複数の梁部材B1が設けられている。さらに、これらの複数の梁部材B1の間に介在する複数の筋交い部材B2が設けられている。図7は、X軸に平行な方向から見たときの、構造物と座標軸との関係を例示する図であり、図6のa-a’断面図である。また、図8は,Y軸に平行な方向から見たときの、構造物と座標軸との関係を例示する図であり、図6のb-b’断面図である。図7,8に示すように、これらの梁部材B0、梁部材B1及び筋交い部材B2は、いずれも橋Bの下面から下方に突出している。その突出量は、梁部材B0と、梁部材B1と、筋交い部材B2とでそれぞれ異なっている。
図6~8に示したような橋Bの下面の形状を示すX,Y,Z座標値が、サーバ装置20において構造物の形状データとして予め記憶されている。このため、位置特定部102は、この形状データと、飛行体10から鉛直方向上方にある橋Bの下面までの距離に基づいて、Z軸上の飛行体10の位置を特定し得る。ここで、前述したように、飛行経路rは、GPS信号を受信可能な空間からX軸方向に平行な方向(X軸正方向)に飛行して橋Bの一方の端部に近いGPS信号受信困難空間Aに進入し、次に、GPS信号受信困難空間A内において橋Bの他方の端部に近い位置までY軸方向(Y軸正方向)に平行な方向に飛行し、そして、GPS信号受信困難空間AからGPS信号を受信可能な空間までX軸方向に平行な方向(X軸負方向)に飛行する飛行経路である。GPS信号を受信可能な空間においては、飛行体10から鉛直方向上方にある橋Bの下面までの測定距離(センサ17による測定距離)が無限大となるから、位置特定部102は、この測定距離に基づいてZ軸上の飛行体10の位置を特定することはできないが、GPS信号によってZ軸上の飛行体10の位置を特定することができる。このとき、川Rの水面の位置(Z座標値)が既知であれば、位置特定部102は、Z軸(第1の座標軸)上の飛行体10の位置について、飛行体10から鉛直方向下方にある川Rの水面までの測定距離(センサ17による測定距離)に基づいて特定するようにしてもよい。そして、飛行体10が橋Bの下方へと移動していく過程で、GPS信号の受信環境が悪くなっていくが、橋Bの側面下方の位置に到達したときに、飛行体10から鉛直方向上方にある橋Bの梁部材B0までの距離が測定される。このとき、位置特定部102は、既知の梁部材B0の形状データと上記測定距離に基づいて、Z軸上の飛行体10の位置を特定する。飛行制御部103は、特定したZ軸上の位置と飛行計画との差分が0に近づくように駆動装置1102を駆動して、飛行体10の飛行を制御する。この例の場合、飛行制御部103は、特定した位置と飛行計画との差分が0に近づくような制御を行ってから、そのZ軸方向の位置が一定となるよう駆動装置1102を駆動して水平飛行を行う。
位置特定部102は、X軸上の飛行体10の位置を、それまでの飛行履歴におけるX軸の軸方向における橋Bの形状の変化(飛行体10から鉛直方向上方の橋Bの下面までの距離の変化)に基づいて特定し得る。具体的には、GPS信号を受信可能な空間においては、飛行体10から鉛直方向上方にある橋Bの下面までの測定距離(センサ17による測定距離)が無限大で一定となるから、位置特定部102は、この測定距離の変化に基づいてX軸上の飛行体10の位置を特定することはできないが、GPS信号によってX軸上の飛行体10の位置を特定することができる。飛行体10が飛行経路rに沿って橋Bの下方へと移動していく過程で、GPS信号の受信環境が悪くなっていくが、橋Bの側面下方の位置に到達したときに、飛行体10から鉛直方向上方にある橋Bの梁部材B0までの距離が測定される。このとき、位置特定部102は、その時点で特定されているZ軸上の飛行体10の位置と、既知の梁部材B0の形状データ及び上記測定距離に基づいて、X軸上の飛行体10の位置を特定する。飛行制御部103は、特定したX軸上の位置と飛行計画との差分が0に近づくように駆動装置1102を駆動して、飛行体10の飛行を制御する。この例の場合、飛行制御部103は、特定した位置と飛行計画との差分が0に近づくような制御を行って、X軸方向に沿って一定の速度で飛行を行う。
また、位置特定部102は、Y軸上の飛行体10の位置を、それまでの飛行履歴におけるY軸の軸方向における橋Bの形状の変化(飛行体10から鉛直方向上方の橋Bの下面までの距離の変化)に基づいて特定し得る。具体的には、GPS信号を受信可能な空間においては、飛行体10から鉛直方向上方にある橋Bの下面までの測定距離(センサ17による測定距離)が無限大で一定となるから、位置特定部102は、この測定距離の変化に基づいてY軸上の飛行体10の位置を特定することはできないが、GPS信号によってY軸上の飛行体10の位置を特定することができる。飛行体10が飛行経路rに沿って橋Bの下方へと移動していく過程で、GPS信号の受信環境が悪くなっていくが、橋Bの側面下方の位置に到達したときに、飛行体10から鉛直方向上方にある橋Bの梁部材B0までの距離が測定される。このとき、位置特定部102は、前述したように、その時点で特定されているZ軸上の飛行体10の位置と、既知の梁部材B0の形状データと上記測定距離に基づいて、X軸上の飛行体10の位置を特定することができるが、梁部材B0の形状はY軸方向に変化する形状ではないから、この時点であっても、測定距離の変化に基づいてY軸上の飛行体10の位置を特定することはできない。この状態からさらにX軸方向に沿って飛行体10が飛行していくと、次に、飛行体10から鉛直方向上方にある橋Bの筋交い部材B2までの距離が測定される。このとき、位置特定部102は、既知の梁部材B0及び筋交い部材B2の形状データと、梁部材B0までの距離を算出した時点から筋交い部材B2までの距離を算出した時点までの時間差及びその間の速度とに基づいて、Y軸上の飛行体10の位置を特定することができる。さらにこの後、飛行体10が進行方向を変えてY軸方向に沿って飛行していくと、飛行体10から鉛直方向上方にある橋Bの梁部材B1までの距離が測定される。このとき、位置特定部102は、その時点で特定されているZ軸上の飛行体10の位置と、既知の梁部材B1の形状データ及び上記測定距離に基づいて、Y軸上の飛行体10の位置を特定することができる。
ここで、センサ17は、ごく短い期間をサンプリング周期として、飛行体10から構造物までの距離を測定する。つまり、位置特定部102は、Z軸上の飛行体10の位置については、このサンプリング周期で連続的に特定することになる。一方、位置特定部102は、X軸及びY軸上の飛行体10の位置については、Z軸における位置特定の頻度よりも少ない頻度で特定することになる。例えば、図7において、Y軸上において隣り合う位置にある梁部材B1と筋交い部材B2との間は、橋Bの下面の形状の変化が無いため、位置特定部102は、この区間においてはY軸上の飛行体10の位置を特定し得ない。
前述したように、飛行制御部103は、位置特定部102により特定された位置に基づいて、飛行体10の飛行を制御する。より具体的には、飛行制御部103は、位置特定部102によりZ軸上の飛行体10の位置が特定された時点においては、当該位置に基づいて飛行体10によるZ軸方向の飛行を制御する。例えば飛行制御部103は駆動装置1102を制御して、飛行計画のとおりに飛行体10が水平方向に飛行するよう、Z軸方向の位置(高度)を維持する。また、飛行制御部103は、位置特定部102によりX,Y軸上の飛行体10の位置が特定された時点においては、当該位置に基づいて飛行体10によるX,Y軸(第2の座標軸)方向の飛行を制御する。例えば、飛行制御部103は駆動装置1102を制御して、飛行体10が飛行計画のとおりに飛行するよう、X,Y軸方向の位置を維持または修正する。一方、位置特定部102によってX,Y軸(第2の座標軸)上の飛行体10の位置が特定されない期間においては、飛行制御部103は、その期間の始期直前に特定されたX,Y軸上の飛行体10の位置と、飛行体10の駆動装置1102の駆動状態から予想されるその時点の飛行速度及び飛行方向に基づいて現在位置を推定し、駆動装置1102を制御して飛行計画と現在位置とが一致するよう、X,Y軸方向の位置を維持または修正する。
飛行体10の撮像装置16は、飛行体10の飛行中に動画の撮像又は所定のタイミングで静止画の撮像を行う。この画像データは、撮像時の飛行体10の位置と日時に対応付けられた状態で飛行体10又はサーバ装置20に保存される。
上記実施形態によれば、GPS信号を受信しづらい空間に位置推定のためのマーカーやGPS信号の発信機を必ずしも設けなくても、構造物に対する飛行体10の位置制御を行うことが可能となる。
変形例
本発明は、上述した実施形態に限定されない。上述した実施形態を以下のように変形してもよい。また、以下の2つ以上の変形例を組み合わせて実施してもよい。
変形例1
図7の例において梁部材B1と筋交い部材B2とがある位置においては構造物の形状に変化が現れるため、このときに位置特定部102はX,Y軸上の飛行体10の位置をセンサ17により特定していたが、例えば飛行経路において、構造物と交差しないX軸又はY軸方向の距離が短い場合等においては、X軸又はY軸上の飛行体10の位置をセンサ17により特定せずに飛行してもよい。
本発明は、上述した実施形態に限定されない。上述した実施形態を以下のように変形してもよい。また、以下の2つ以上の変形例を組み合わせて実施してもよい。
変形例1
図7の例において梁部材B1と筋交い部材B2とがある位置においては構造物の形状に変化が現れるため、このときに位置特定部102はX,Y軸上の飛行体10の位置をセンサ17により特定していたが、例えば飛行経路において、構造物と交差しないX軸又はY軸方向の距離が短い場合等においては、X軸又はY軸上の飛行体10の位置をセンサ17により特定せずに飛行してもよい。
変形例2
図7の例において、Y軸上において隣り合う位置にある梁部材B1と筋交い部材B2との間は橋Bの形状の変化が無いため、位置特定部102は、この区間はY軸上の飛行体10の位置を特定していなかった。図9に示すように、位置特定部102によって特定された座標軸上の飛行体10の位置に基づいて、当該位置が特定されるまでの期間における飛行体10の当該座標軸上の位置を補正する位置補正部104をそなえてもよい。具体的には、位置補正部104は、特定されたX,Y軸上の飛行体10の位置と、それまでの飛行体10の駆動装置1102の駆動状態から予想される飛行速度及び飛行方向の履歴に基づいて、過去の飛行位置を補正する。この場合、過去の飛行時における風速等の環境情報を考慮して位置を補正してもよい。
図7の例において、Y軸上において隣り合う位置にある梁部材B1と筋交い部材B2との間は橋Bの形状の変化が無いため、位置特定部102は、この区間はY軸上の飛行体10の位置を特定していなかった。図9に示すように、位置特定部102によって特定された座標軸上の飛行体10の位置に基づいて、当該位置が特定されるまでの期間における飛行体10の当該座標軸上の位置を補正する位置補正部104をそなえてもよい。具体的には、位置補正部104は、特定されたX,Y軸上の飛行体10の位置と、それまでの飛行体10の駆動装置1102の駆動状態から予想される飛行速度及び飛行方向の履歴に基づいて、過去の飛行位置を補正する。この場合、過去の飛行時における風速等の環境情報を考慮して位置を補正してもよい。
変形例3
図7の例において、Y軸上において隣り合う位置にある梁部材B1と筋交い部材B2との間は、橋Bの形状の変化が無いため、位置特定部102は、この区間はY軸上の飛行体10の位置を特定し得なかった。飛行制御部103は、このような飛行体10の位置を特定し得ない期間(以下、位置不定期間という)に上限を設け、位置不定期間が上限に到達したときには、飛行を中断する等のエラー処理を行ってもよい。この位置不定期間は座標軸によって異なっていてもよい。例えば、精密な位置特定が要求されるY軸に対しては位置不定期間T1が設定され、Y軸ほど精密な位置特定が要求されないX軸に対しては別の位置不定期間T2が設定される(T1<T2)といった具合である。
図7の例において、Y軸上において隣り合う位置にある梁部材B1と筋交い部材B2との間は、橋Bの形状の変化が無いため、位置特定部102は、この区間はY軸上の飛行体10の位置を特定し得なかった。飛行制御部103は、このような飛行体10の位置を特定し得ない期間(以下、位置不定期間という)に上限を設け、位置不定期間が上限に到達したときには、飛行を中断する等のエラー処理を行ってもよい。この位置不定期間は座標軸によって異なっていてもよい。例えば、精密な位置特定が要求されるY軸に対しては位置不定期間T1が設定され、Y軸ほど精密な位置特定が要求されないX軸に対しては別の位置不定期間T2が設定される(T1<T2)といった具合である。
変形例4
本発明において、飛行体10が構造物に対して行う処理は撮像処理に限らず、どのようなものであってもよい。また、座標軸の設定の仕方は実施形態の例に限らず、例えばXYZ座標空間のような直交座標系でなくてもよい。
本発明において、飛行体10が構造物に対して行う処理は撮像処理に限らず、どのようなものであってもよい。また、座標軸の設定の仕方は実施形態の例に限らず、例えばXYZ座標空間のような直交座標系でなくてもよい。
変形例5
実施形態において、飛行体10が飛行制御装置として機能していたが、サーバ装置20が飛行制御装置として機能して飛行体10を制御してもよい。
実施形態において、飛行体10が飛行制御装置として機能していたが、サーバ装置20が飛行制御装置として機能して飛行体10を制御してもよい。
変形例6
実施形態において、位置特定部102は、例外的に川の水面までの距離に基づいてZ軸上の飛行体10の位置を特定するようにしてもよかったが、これ以外にも、例えば構造物の形状が位置に応じて固有のものであれば、飛行体10が構造物を撮像して画像認識を行った結果から、その構造物に対する飛行体10の位置を特定してもよい。
実施形態において、位置特定部102は、例外的に川の水面までの距離に基づいてZ軸上の飛行体10の位置を特定するようにしてもよかったが、これ以外にも、例えば構造物の形状が位置に応じて固有のものであれば、飛行体10が構造物を撮像して画像認識を行った結果から、その構造物に対する飛行体10の位置を特定してもよい。
変形例7
例えばトンネルのような構造物の場合であって、トンネルの長手方向をY軸方向とし、そのY軸に直行する水平な方向をX軸方向とし、鉛直方向をZ軸方向とした場合において、飛行体10からみてX軸方向にある構造物(トンネル内壁側面)までの距離を測定するとともに、Z軸方向にある構造物(トンネル内壁天井面)までの距離を測定するセンサ17を備えてもよい。この場合、トンネルの内壁面は、実施形態の橋と同様に、X,Y,Z軸の少なくともいずれか1の方向において何らかの変化があるような形状をしている。例えば、位置特定部102は、Z軸上の位置については、Z軸方向にある構造物(トンネル内壁天井面)までの距離及び/又はX軸方向にある構造物(トンネル内壁側面)までの距離に基づいて特定し、X,Y軸上の位置については、Z軸方向にある構造物(トンネル内壁天井面)までの距離及び/又はX軸方向にある構造物(トンネル内壁側面)までの距離の変化に基づいて特定する。このように、位置特定部102は、飛行体10から構造物までの複数方向の距離に基づいて飛行体10の位置を特定するようにしてもよい。
例えばトンネルのような構造物の場合であって、トンネルの長手方向をY軸方向とし、そのY軸に直行する水平な方向をX軸方向とし、鉛直方向をZ軸方向とした場合において、飛行体10からみてX軸方向にある構造物(トンネル内壁側面)までの距離を測定するとともに、Z軸方向にある構造物(トンネル内壁天井面)までの距離を測定するセンサ17を備えてもよい。この場合、トンネルの内壁面は、実施形態の橋と同様に、X,Y,Z軸の少なくともいずれか1の方向において何らかの変化があるような形状をしている。例えば、位置特定部102は、Z軸上の位置については、Z軸方向にある構造物(トンネル内壁天井面)までの距離及び/又はX軸方向にある構造物(トンネル内壁側面)までの距離に基づいて特定し、X,Y軸上の位置については、Z軸方向にある構造物(トンネル内壁天井面)までの距離及び/又はX軸方向にある構造物(トンネル内壁側面)までの距離の変化に基づいて特定する。このように、位置特定部102は、飛行体10から構造物までの複数方向の距離に基づいて飛行体10の位置を特定するようにしてもよい。
そのほかの変形例
上記実施の形態の説明に用いたブロック図は、機能単位のブロックを示している。これらの機能ブロック(構成部)は、ハードウェア及び/又はソフトウェアの任意の組み合わせによって実現される。また、各機能ブロックの実現手段は特に限定されない。すなわち、各機能ブロックは、物理的及び/又は論理的に結合した1つの装置により実現されてもよいし、物理的及び/又は論理的に分離した2つ以上の装置を直接的及び/又は間接的に(例えば、有線及び/又は無線)で接続し、これら複数の装置により実現されてもよい。
また、サーバ装置20の機能の少なくとも一部が飛行体10に実装されてもよい。同様に、飛行体10の機能の少なくとも一部がサーバ装置20に実装されてもよい。
上記実施の形態の説明に用いたブロック図は、機能単位のブロックを示している。これらの機能ブロック(構成部)は、ハードウェア及び/又はソフトウェアの任意の組み合わせによって実現される。また、各機能ブロックの実現手段は特に限定されない。すなわち、各機能ブロックは、物理的及び/又は論理的に結合した1つの装置により実現されてもよいし、物理的及び/又は論理的に分離した2つ以上の装置を直接的及び/又は間接的に(例えば、有線及び/又は無線)で接続し、これら複数の装置により実現されてもよい。
また、サーバ装置20の機能の少なくとも一部が飛行体10に実装されてもよい。同様に、飛行体10の機能の少なくとも一部がサーバ装置20に実装されてもよい。
本明細書で説明した各態様/実施形態は、LTE(Long Term Evolution)、LTE-A(LTE-Advanced)、SUPER 3G、IMT-Advanced、4G、5G、FRA(Future Radio Access)、W-CDMA(登録商標)、GSM(登録商標)、CDMA2000、UMB(Ultra Mobile Broadband)、IEEE 802.11(Wi-Fi)、IEEE 802.16(WiMAX)、IEEE 802.20、UWB(Ultra-WideBand)、Bluetooth(登録商標)、その他の適切なシステムを利用するシステム及び/又はこれらに基づいて拡張された次世代システムに適用されてもよい。
本明細書で説明した各態様/実施形態の処理手順、シーケンス、フローチャートなどは、矛盾の無い限り、順序を入れ替えてもよい。例えば、本明細書で説明した方法については、例示的な順序で様々なステップの要素を提示しており、提示した特定の順序に限定されない。
本明細書で説明した各態様/実施形態は単独で用いてもよいし、組み合わせて用いてもよいし、実行に伴って切り替えて用いてもよい。また、所定の情報の通知(例えば、「Xであること」の通知)は、明示的に行うものに限られず、暗黙的(例えば、当該所定の情報の通知を行わない)ことによって行われてもよい。
本明細書で説明した各態様/実施形態は単独で用いてもよいし、組み合わせて用いてもよいし、実行に伴って切り替えて用いてもよい。また、所定の情報の通知(例えば、「Xであること」の通知)は、明示的に行うものに限られず、暗黙的(例えば、当該所定の情報の通知を行わない)ことによって行われてもよい。
本明細書で使用する「システム」及び「ネットワーク」という用語は、互換的に使用される。
本明細書で説明した情報又はパラメータなどは、絶対値で表されてもよいし、所定の値からの相対値で表されてもよいし、対応する別の情報で表されてもよい。例えば、無線リソースはインデックスで指示されるものであってもよい。
上述したパラメータに使用する名称はいかなる点においても限定的なものではない。さらに、これらのパラメータを使用する数式等は、本明細書で明示的に開示したものと異なる場合もある。様々なチャネル(例えば、PUCCH、PDCCHなど)及び情報要素(例えば、TPCなど)は、あらゆる好適な名称によって識別できるので、これらの様々なチャネル及び情報要素に割り当てている様々な名称は、いかなる点においても限定的なものではない。
本明細書で使用する「判定(determining)」、「決定(determining)」という用語は、多種多様な動作を包含する場合がある。「判定」、「決定」は、例えば、判定(judging)、計算(calculating)、算出(computing)、処理(processing)、導出(deriving)、調査(investigating)、探索(looking up)(例えば、テーブル、データベース又は別のデータ構造での探索)、確認(ascertaining)した事を「判定」「決定」したとみなす事などを含み得る。また、「判定」、「決定」は、受信(receiving)(例えば、情報を受信すること)、送信(transmitting)(例えば、情報を送信すること)、入力(input)、出力(output)、アクセス(accessing)(例えば、メモリ中のデータにアクセスすること)した事を「判定」「決定」したとみなす事などを含み得る。また、「判定」、「決定」は、解決(resolving)、選択(selecting)、選定(choosing)、確立(establishing)、比較(comparing)などした事を「判定」「決定」したとみなす事を含み得る。つまり、「判定」「決定」は、何らかの動作を「判定」「決定」したとみなす事を含み得る。
本発明は、飛行制御システム1やサーバ装置20において行われる処理のステップを備える飛行制御方法又は情報処理方法として提供されてもよい。また、本発明は、飛行体10又はサーバ装置20において実行されるプログラムとして提供されてもよい。かかるプログラムは、光ディスク等の記録媒体に記録した形態で提供されたり、インターネット等のネットワークを介して、コンピュータにダウンロードさせ、これをインストールして利用可能にするなどの形態で提供されたりすることが可能である。
ソフトウェア、命令などは、伝送媒体を介して送受信されてもよい。例えば、ソフトウェアが、同軸ケーブル、光ファイバケーブル、ツイストペア及びデジタル加入者回線(DSL)などの有線技術及び/又は赤外線、無線及びマイクロ波などの無線技術を使用してウェブサイト、サーバ、又は他のリモートソースから送信される場合、これらの有線技術及び/又は無線技術は、伝送媒体の定義内に含まれる。
本明細書で説明した情報、信号などは、様々な異なる技術のいずれかを使用して表されてもよい。例えば、上記の説明全体に渡って言及され得るデータ、命令、コマンド、情報、信号、ビット、シンボル、チップなどは、電圧、電流、電磁波、磁界若しくは磁性粒子、光場若しくは光子、又はこれらの任意の組み合わせによって表されてもよい。
本明細書で説明した用語及び/又は本明細書の理解に必要な用語については、同一の又は類似する意味を有する用語と置き換えてもよい。例えば、チャネル及び/又はシンボルは信号(シグナル)であってもよい。また、信号はメッセージであってもよい。また、コンポーネントキャリア(CC)は、キャリア周波数、セルなどと呼ばれてもよい。
本明細書で使用する「第1の」、「第2の」などの呼称を使用した要素へのいかなる参照も、それらの要素の量又は順序を全般的に限定するものではない。これらの呼称は、2つ以上の要素間を区別する便利な方法として本明細書で使用され得る。従って、第1及び第2の要素への参照は、2つの要素のみがそこで採用され得ること、又は何らかの形で第1の要素が第2の要素に先行しなければならないことを意味しない。
上記の各装置の構成における「手段」を、「部」、「回路」、「デバイス」等に置き換えてもよい。
「含む(including)」、「含んでいる(comprising)」、及びそれらの変形が、本明細書或いは特許請求の範囲で使用されている限り、これら用語は、用語「備える」と同様に、包括的であることが意図される。さらに、本明細書或いは特許請求の範囲において使用されている用語「又は(or)」は、排他的論理和ではないことが意図される。
本開示の全体において、例えば、英語でのa、an、及びtheのように、翻訳により冠詞が追加された場合、これらの冠詞は、文脈から明らかにそうではないことが示されていなければ、複数のものを含むものとする。
以上、本発明について詳細に説明したが、当業者にとっては、本発明が本明細書中に説明した実施形態に限定されるものではないということは明らかである。本発明は、特許請求の範囲の記載により定まる本発明の趣旨及び範囲を逸脱することなく修正及び変更態様として実施することができる。従って、本明細書の記載は、例示説明を目的とするものであり、本発明に対して何ら制限的な意味を有するものではない。
1:飛行制御システム、10:飛行体、20:サーバ装置、11:プロセッサ、12:メモリ、13:ストレージ、14:通信装置、15:測位装置,16:撮像装置、17:センサ、18:バス、101:設定部、102:位置特定部、103:飛行制御部。
Claims (7)
- 衛星から発信される無線信号に基づく測位の精度が閾値以下の空間を含む飛行空間に、飛行体の位置を特定する基準となる複数の座標軸を設定する設定部と、
前記空間において、前記複数の座標軸の各々でそれぞれ異なる方法を用いて、前記飛行体の位置を特定する位置特定部と、
前記位置特定部により特定された前記位置に基づいて、前記飛行体の飛行を制御する飛行制御部と
を備えることを特徴とする飛行体制御装置。 - 前記複数の座標軸は、構造物と交差する第1の座標軸及び前記構造物と交差しない第2の座標軸を含み、
前記位置特定部は、前記第1の座標軸上の前記飛行体の前記位置を連続的に特定する一方、前記第2の座標軸上の前記飛行体の前記位置を、前記第1の座標軸における前記位置の特定の頻度よりも少ない頻度で特定するか、又は前記第2の座標軸上の前記飛行体の前記位置を特定しない
ことを特徴とする請求項1記載の飛行体制御装置。 - 前記飛行制御部は、
前記位置特定部により前記第2の座標軸上の前記飛行体の少なくとも1の位置が特定された時点においては、当該少なくとも1の位置に基づいて前記飛行体による前記第2の座標軸の軸方向の飛行を制御する一方、
前記位置特定部によって前記第2の座標軸上の前記飛行体の位置が特定されない期間においては、前記少なくとも1の位置のうちその期間の始期直前に特定された前記第2の座標軸上の前記飛行体の位置に基づいて、前記飛行体による前記第2の座標軸の軸方向の飛行を制御する
ことを特徴とする請求項2記載の飛行体制御装置。 - 前記位置特定部は、前記第1の座標軸上の前記飛行体の前記位置については、前記飛行体から前記構造物までの距離に基づいて特定する
ことを特徴とする請求項2又は3記載の飛行体制御装置。 - 前記位置特定部は、前記第2の座標軸上の前記飛行体の前記位置については、当該第2の座標軸の軸方向における前記構造物の形状の変化に基づいて特定する
ことを特徴とする請求項2~4のいずれか1項に記載の飛行体制御装置。 - 前記位置特定部によって特定された前記複数の座標軸に含まれる座標軸上の前記飛行体の前記位置に基づいて、当該位置が特定されるまでの期間における前記飛行体の当該座標軸上の他の位置を補正する位置補正部
を備えることを特徴とする請求項2~5のいずれか1項に記載の飛行体制御装置。 - 前記飛行制御部が前記始期直前に特定された前記位置に基づいて前記飛行体の飛行を制御する前記期間の上限は、前記複数の座標軸に含まれる座標軸に応じて異なる
ことを特徴とする請求項3に記載の飛行体制御装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/973,205 US12130640B2 (en) | 2018-06-26 | 2019-06-26 | Flying object control apparatus |
| JP2020527569A JP7246388B2 (ja) | 2018-06-26 | 2019-06-26 | 飛行体制御装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018-120797 | 2018-06-26 | ||
| JP2018120797 | 2018-06-26 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020004448A1 true WO2020004448A1 (ja) | 2020-01-02 |
Family
ID=68986532
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/025328 WO2020004448A1 (ja) | 2018-06-26 | 2019-06-26 | 飛行体制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12130640B2 (ja) |
| JP (1) | JP7246388B2 (ja) |
| WO (1) | WO2020004448A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023067653A1 (ja) * | 2021-10-18 | 2023-04-27 | 日本電信電話株式会社 | 飛行体制御装置、飛行体制御方法、及び飛行体制御プログラム |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11348269B1 (en) * | 2017-07-27 | 2022-05-31 | AI Incorporated | Method and apparatus for combining data to construct a floor plan |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015163106A1 (ja) * | 2014-04-25 | 2015-10-29 | ソニー株式会社 | 制御装置、撮像装置、制御方法、撮像方法及びコンピュータプログラム |
| WO2016059930A1 (ja) * | 2014-10-17 | 2016-04-21 | ソニー株式会社 | 装置、方法及びプログラム |
| WO2018078859A1 (ja) * | 2016-10-31 | 2018-05-03 | 富士通株式会社 | 飛行制御プログラム、飛行制御方法、および情報処理装置 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107000839B (zh) * | 2016-12-01 | 2019-05-03 | 深圳市大疆创新科技有限公司 | 无人机的控制方法、装置、设备和无人机的控制系统 |
-
2019
- 2019-06-26 JP JP2020527569A patent/JP7246388B2/ja active Active
- 2019-06-26 WO PCT/JP2019/025328 patent/WO2020004448A1/ja active Application Filing
- 2019-06-26 US US16/973,205 patent/US12130640B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015163106A1 (ja) * | 2014-04-25 | 2015-10-29 | ソニー株式会社 | 制御装置、撮像装置、制御方法、撮像方法及びコンピュータプログラム |
| WO2016059930A1 (ja) * | 2014-10-17 | 2016-04-21 | ソニー株式会社 | 装置、方法及びプログラム |
| WO2018078859A1 (ja) * | 2016-10-31 | 2018-05-03 | 富士通株式会社 | 飛行制御プログラム、飛行制御方法、および情報処理装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023067653A1 (ja) * | 2021-10-18 | 2023-04-27 | 日本電信電話株式会社 | 飛行体制御装置、飛行体制御方法、及び飛行体制御プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20210191429A1 (en) | 2021-06-24 |
| JP7246388B2 (ja) | 2023-03-27 |
| US12130640B2 (en) | 2024-10-29 |
| JPWO2020004448A1 (ja) | 2021-08-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108521670B (zh) | 面向多机紧密编队飞行基于uwb通信与定位方法及一体化系统 | |
| RU2687008C2 (ru) | Способ установления плановой траектории полета транспортного средства возле цели (варианты), вычислительное устройство (варианты) | |
| JP7194682B2 (ja) | 飛行制御装置 | |
| EP3174328A1 (en) | System and method for radio signal coverage mapping | |
| US11501651B2 (en) | Flight control apparatus and flight control system | |
| WO2020004448A1 (ja) | 飛行体制御装置 | |
| US11393344B2 (en) | Flight control apparatus and flight control system | |
| CN113916187B (zh) | 基于无人机的基站天线下倾角测量方法、装置和系统 | |
| WO2024120187A1 (zh) | 一种用于信息拒止环境下的无人机动态目标估计方法 | |
| JP7178351B2 (ja) | 飛行制御システム | |
| JP7157823B2 (ja) | 情報処理装置 | |
| US20240125886A1 (en) | Altitude calculation method and altitude calculation program for flying body, and flying body including the same | |
| JP7050809B2 (ja) | 情報処理装置 | |
| JP7143525B2 (ja) | 情報処理装置及び情報処理方法 | |
| JP2019101451A (ja) | 情報処理装置 | |
| US11891176B2 (en) | Determination of position sending interval for flying vehicle dependent upon ground surface below vehicle | |
| JP7060624B2 (ja) | 情報処理装置 | |
| JP6957651B2 (ja) | 情報処理装置 | |
| US11794900B2 (en) | Information processing apparatus | |
| JP7058290B2 (ja) | 情報処理装置及び情報処理方法 | |
| WO2024185034A1 (ja) | 電波発信源探査システム、電波発信源探査方法、及び制御装置 | |
| WO2023162583A1 (ja) | 制御装置 | |
| JP6903535B2 (ja) | 情報処理装置 | |
| JP2020067587A (ja) | 情報処理装置 | |
| JP2023135562A (ja) | 制御装置、飛行体、プログラム、及び制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19826189 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2020527569 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 19826189 Country of ref document: EP Kind code of ref document: A1 |