WO2018062395A1 - 電流推定装置 - Google Patents
電流推定装置 Download PDFInfo
- Publication number
- WO2018062395A1 WO2018062395A1 PCT/JP2017/035239 JP2017035239W WO2018062395A1 WO 2018062395 A1 WO2018062395 A1 WO 2018062395A1 JP 2017035239 W JP2017035239 W JP 2017035239W WO 2018062395 A1 WO2018062395 A1 WO 2018062395A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- voltage
- power supply
- value
- current
- vac2
- Prior art date
Links
Images















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of ac power input into dc power output; Conversion of dc power input into ac power output
- H02M7/02—Conversion of ac power input into dc power output without possibility of reversal
- H02M7/04—Conversion of ac power input into dc power output without possibility of reversal by static converters
- H02M7/12—Conversion of ac power input into dc power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M7/21—Conversion of ac power input into dc power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal
- H02M7/217—Conversion of ac power input into dc power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only
- H02M7/2176—Conversion of ac power input into dc power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only comprising a passive stage to generate a rectified sinusoidal voltage and a controlled switching element in series between such stage and the output
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R19/00—Arrangements for measuring currents or voltages or for indicating presence or sign thereof
- G01R19/0092—Arrangements for measuring currents or voltages or for indicating presence or sign thereof measuring current only
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F27/00—Details of transformers or inductances, in general
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F41/00—Apparatus or processes specially adapted for manufacturing or assembling magnets, inductances or transformers; Apparatus or processes specially adapted for manufacturing materials characterised by their magnetic properties
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M1/00—Details of apparatus for conversion
- H02M1/12—Arrangements for reducing harmonics from ac input or output
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of ac power input into dc power output; Conversion of dc power input into ac power output
- H02M7/02—Conversion of ac power input into dc power output without possibility of reversal
- H02M7/04—Conversion of ac power input into dc power output without possibility of reversal by static converters
- H02M7/12—Conversion of ac power input into dc power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of ac power input into dc power output; Conversion of dc power input into ac power output
- H02M7/02—Conversion of ac power input into dc power output without possibility of reversal
- H02M7/04—Conversion of ac power input into dc power output without possibility of reversal by static converters
- H02M7/12—Conversion of ac power input into dc power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M7/21—Conversion of ac power input into dc power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal
- H02M7/217—Conversion of ac power input into dc power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only
- H02M7/219—Conversion of ac power input into dc power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only in a bridge configuration
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of ac power input into dc power output; Conversion of dc power input into ac power output
- H02M7/42—Conversion of dc power input into ac power output without possibility of reversal
- H02M7/44—Conversion of dc power input into ac power output without possibility of reversal by static converters
- H02M7/48—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of ac power input into dc power output; Conversion of dc power input into ac power output
- H02M7/42—Conversion of dc power input into ac power output without possibility of reversal
- H02M7/44—Conversion of dc power input into ac power output without possibility of reversal by static converters
- H02M7/48—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M7/53—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal
- H02M7/537—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters
- H02M7/5387—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters in a bridge configuration
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of ac power input into dc power output; Conversion of dc power input into ac power output
- H02M7/42—Conversion of dc power input into ac power output without possibility of reversal
- H02M7/44—Conversion of dc power input into ac power output without possibility of reversal by static converters
- H02M7/48—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M7/53—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal
- H02M7/537—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters
- H02M7/539—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters with automatic control of output wave form or frequency
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/40—Testing power supplies
- G01R31/42—AC power supplies
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M1/00—Details of apparatus for conversion
- H02M1/0003—Details of control, feedback or regulation circuits
- H02M1/0009—Devices or circuits for detecting current in a converter
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M5/00—Conversion of ac power input into ac power output, e.g. for change of voltage, for change of frequency, for change of number of phases
- H02M5/40—Conversion of ac power input into ac power output, e.g. for change of voltage, for change of frequency, for change of number of phases with intermediate conversion into dc
- H02M5/42—Conversion of ac power input into ac power output, e.g. for change of voltage, for change of frequency, for change of number of phases with intermediate conversion into dc by static converters
- H02M5/44—Conversion of ac power input into ac power output, e.g. for change of voltage, for change of frequency, for change of number of phases with intermediate conversion into dc by static converters using discharge tubes or semiconductor devices to convert the intermediate dc into ac
- H02M5/453—Conversion of ac power input into ac power output, e.g. for change of voltage, for change of frequency, for change of number of phases with intermediate conversion into dc by static converters using discharge tubes or semiconductor devices to convert the intermediate dc into ac using devices of a triode or transistor type requiring continuous application of a control signal
- H02M5/458—Conversion of ac power input into ac power output, e.g. for change of voltage, for change of frequency, for change of number of phases with intermediate conversion into dc by static converters using discharge tubes or semiconductor devices to convert the intermediate dc into ac using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only
Definitions
- the present invention controls an inverter circuit in a power converter in which a capacitor is connected in parallel to the rectifier circuit between the rectifier circuit and the inverter circuit, and a reactor is connected between the AC power supply and the capacitor.
- the present invention relates to a device for estimating a power supply current for the purpose.
- a power conversion device includes a converter circuit that converts AC power from an AC power source into DC power and an inverter circuit that converts the output of the converter circuit into AC power having a predetermined frequency.
- a capacitor is generally provided on the output side of the converter circuit.
- Patent Document 1 is known as such a power conversion device.
- inverter control including control of power supply harmonics is performed based on the detected power supply current.
- CT Current Transformer
- Patent Document 1 a method using a current detection circuit including a shunt resistor and an operational amplifier instead of the current detection sensor (Patent Document 2).
- the number of components of the circuit is larger than that of a voltage dividing circuit used for detecting a DC voltage and having a simple configuration, which increases costs. Furthermore, a space for arranging the components of the current detection circuit must be provided on the printed circuit board.
- Patent Document 3 there is a method for estimating the power supply current without detecting it.
- JP 2012-165631 A JP 2012-151973 A Japanese Unexamined Patent Publication No. 2011-205729
- Patent Document 3 the voltage across the reactor located between the converter circuit and the inverter circuit is detected, and the power supply current is estimated based on the detection result.
- the voltage across the reactor is detected by a voltage detection circuit comprising the voltage dividing circuit. Therefore, in Patent Document 3, the number of component parts is smaller than that in Patent Document 1, and it is not necessary to provide much arrangement space for the component parts as compared with Patent Documents 1 and 2.
- the present invention has been made in view of such a point, and an object thereof is to accurately and inexpensively estimate a power supply current by using a voltage detection circuit.
- a first aspect of the present disclosure is between a rectifier circuit (21) that rectifies AC power output from an AC power supply (91) and an inverter circuit (27) that is supplied with power from the rectifier circuit (21).
- a power converter (1) in which a capacitor (26) is connected in parallel to the rectifier circuit (21), and a reactor (29) is connected between the AC power supply (91) and the capacitor (26)
- the current estimation device (10) for estimating the power supply current (Iin), which is the current upstream of the capacitor (26), is a voltage dividing circuit comprising a plurality of resistors (34a to 34c, 35a to 35c).
- a voltage detection circuit (33) configured to detect a voltage (Vac1, Vac2) correlated with the power supply voltage (Vin) of the AC power supply (91), and a detection result (Vac1, Vac2) of the voltage detection circuit (33)
- the voltage (VL) across the reactor (29) is obtained based on the A calculation unit (40) for estimating a power supply current (Iin), wherein the calculation unit (40) has a value correlated to an average value per predetermined time of the estimated power supply current (Iin), the capacitor (26 )
- the current estimation device is characterized in that the voltage (VL) across the reactor is obtained based on the detection result (Vac1, Vac2) of the voltage detection circuit (33).
- the voltage (Vac1, Vac2) that correlates with the power supply voltage (Vin) is detected by the voltage detection circuit (33), but the detection results (Vac1, Vac2) are directly used for the estimation of the power supply current. Instead, it is used to estimate the power supply current (Iin) after gain correction.
- the gain correlates with the value that correlates with the average value of the estimated power supply current (Iin) per predetermined time, and the value that correlates with the average value of the current (Iinv) downstream of the capacitor (26) per predetermined time. To be corrected.
- examples of the “value correlated with the average value” include the average value of the current (Iin, Iinv) per predetermined time itself, the integrated value of the current (Iin, Iinv) per predetermined time, and the like. That the value related to the estimated power supply current (Iin) matches the value related to the current (Iinv) on the downstream side of the capacitor (26) means that the current (Ic) flowing through the capacitor (26) obtained by calculation is predetermined. It means that the value correlated with the average value per time converges to zero.
- the gain correction as described above is performed on the detection result (Vac1, Vac2) of the voltage detection circuit (33), and based on the detection result (Vac1, Vac2) after the gain correction.
- the power supply current (Iin) is estimated.
- the current estimation device (10) can accurately calculate the power supply current (Iin) using the voltage detection circuit (33) having a relatively simple configuration without using a current sensor or a current detection circuit. it can.
- the capacitor (26) absorbs voltage fluctuations due to switching of the inverter circuit (27) without absorbing voltage fluctuations from the rectifier circuit (21) in the first mode.
- the above capacitor (26) means a relatively small capacity.
- the small capacitor (26) does not absorb voltage fluctuations from the rectifier circuit (21), so the ripple voltage caused by the power supply frequency of the AC power supply (91) cannot be smoothed and power supply harmonics are generated. It's easy to do. Therefore, it is necessary to control the inverter circuit (27) so that the power supply harmonic becomes as small as possible, and the power supply current is used for this control.
- the current estimation device (10) can accurately estimate the power supply current (Iin). By using the estimated power source current (Iin) with high accuracy, the control of the inverter circuit (27) that suppresses power source harmonics is also more accurate.
- the calculation unit (40) further includes a voltage (VL) across the reactor (29) based on a voltage drop (VR) of the reactor (29). )
- the rectifier circuit (21) includes a diode bridge circuit in which a plurality of diodes (D1 to D4) are bridge-connected.
- the calculation unit (40) further obtains the voltage (VL) across the reactor (29) based on the voltage drop (Vdb) generated in the diodes (D1 to D4).
- the voltage detection circuit (33) includes a power supply voltage (Vin) of the AC power supply (91) between the AC power supply (91) and the rectifier circuit (21). ) Is detected (Vac1, Vac2).
- the voltage detection circuit (33) is a first voltage detection unit corresponding to a positive output of the AC power supply (91). (34) and a second voltage detection unit (35) corresponding to the negative output of the AC power supply (91), and the calculation unit (40) determines a predetermined value of the estimated power supply current (Iin) The first voltage detection unit (34) so that the value correlated with the average value per time coincides with the value correlated with the average value per predetermined time of the current (Iinv) downstream of the capacitor (26).
- the gains of the first detection result (Vac1) and the second detection result (Vac2) of the second voltage detector (35) are corrected, and the first detection result (Vac1) after gain correction and the gain correction are corrected. Based on the difference from the second detection result (Vac2), the voltage (VL) across the reactor (29) is obtained.
- VL voltage across the reactor (29) in which the influence of carrier noise is canceled.
- the arithmetic unit (40) is configured to calculate the integration value of the integrated value in the voltage (VL) across the reactor (29) for the predetermined time.
- the value correlating with the average value of the capacitor is calculated as the first value, and the sum of the differential value of the voltage across the capacitor (26) (Vdc) and the current (Iinv) downstream of the capacitor (26),
- a value correlated with the average value per predetermined time is calculated as a second value, and the first value matches the second value, thereby obtaining an average value per predetermined time of the estimated power supply current (Iin).
- the detection result (Vac1, Vac2) of the voltage detection circuit (33) is such that the correlated value matches the value correlated with the average value per predetermined time of the current (Iinv) on the downstream side of the capacitor (26). Correct the gain.
- the gain correction of the detection result (Vac1, Vac2) of the voltage detection circuit (33) is performed with high accuracy.
- the eighth mode is the seventh mode, wherein the predetermined time is set to a half cycle of the AC power source (91).
- the arithmetic unit (40) is configured to supply the power supply current based on an integrated value of the voltage (VL) across the reactor (29).
- (Iin1) is calculated as a third value
- the power supply current (Iin2) based on the differential value of the voltage (Vdc) across the capacitor (26) is calculated as a fourth value
- the phase of the third value is
- the offset of the detection result (Vac1, Vac2) of the voltage detection circuit (33) is corrected so as to coincide with the phase of the fourth value, and the detection result of the voltage detection circuit (33) after the offset correction (Vac1, Based on Vac2), the voltage across the reactor (VL) is obtained.
- the offset correction of the detection result (Vac1, Vac2) of the voltage detection circuit (33) is performed with high accuracy. Furthermore, since the voltage (VL) across the reactor (29) can be obtained more accurately based on the detection result (Vac1, Vac2) of the voltage detection circuit (33) subjected to offset correction as well as gain correction, The power supply current (Iin) estimated based on the voltage (VL) can be closer to an actual value.
- the calculation unit (40) calculates the amplitude (inn_amp1, inn_amp2) at a frequency component that is a predetermined multiple of the power supply frequency for each of the third value and the fourth value. If the amplitude (inn_amp1, inn_amp2) is greater than the predetermined value, the offset of the detection result (Vac1, Vac2) of the voltage detection circuit (33) is corrected, and the amplitude (inn_amp1, inn_amp2) is the predetermined value. Is smaller than the offset of the detection result (Vac1, Vac2) of the voltage detection circuit (33).
- each phase of the third value and the fourth value may not be accurately calculated.
- the amplitude (inn_amp1, inn_amp2) is larger than a predetermined value, it is determined that each phase of the third value and the fourth value can be accurately calculated, and offset correction using each phase is performed. Do. Thereby, it can suppress that the precision of offset correction falls.
- the calculation unit (40) includes the voltage detection circuit (33) in one cycle of the AC power supply (91).
- the average value of the detection results (Vac1, Vac2) in a section where the detection results (Vac1, Vac2) of the current are not dominant is obtained and used to offset the detection results (Vac1, Vac2) of the voltage detection circuit (33).
- the voltage across the reactor (VL) is obtained based on the detection result (Vac1, Vac2) of the voltage detection circuit (33) after the offset correction.
- the average value of the detection results (Vac1, Vac2) in the section where the detection results (Vac1, Vac2) of the voltage detection circuit (33) are not dominant corresponds to the offset deviation.
- the offset deviation of the detection result (Vac1, Vac2) of the voltage detection circuit (33) can be easily obtained here.
- the current estimation device (10) can obtain the voltage (VL) across the reactor (29) with higher accuracy using the detection results (Vac1, Vac2) of the voltage detection circuit (33) after offset correction. .
- the arithmetic unit (40) is configured to perform the above operation based on the detection result (Vac1, Vac2) of the voltage detection circuit (33). Calculate the power supply voltage (Vin) of the AC power supply (91) and use the voltage value of the power supply voltage (Vin) near the zero cross of the AC power supply (91) to detect the detection result (Vac1 , Vac2) is corrected, and the voltage across the reactor (VL) is obtained based on the detection result (Vac1, Vac2) of the voltage detection circuit (33) after the offset correction.
- the voltage value of the power supply voltage (Vin) near the zero cross of the AC power supply (91) corresponds to the offset deviation.
- the offset deviation of the detection result (Vac1, Vac2) of the voltage detection circuit (33) can be easily obtained here.
- the current estimation device (10) can obtain the voltage (VL) across the reactor (29) with higher accuracy using the detection results (Vac1, Vac2) of the voltage detection circuit (33) after offset correction. .
- the calculation unit (40) performs gain correction of the detection result (Vac1, Vac2) of the voltage detection circuit (33). After performing, the offset correction of the detection result (Vac1, Vac2) of the voltage detection circuit (33) is performed.
- the offset correction is further performed in the state where the gain correction has been performed first, the offset correction can be easily performed during the offset correction.
- the reactor (29) is connected between the AC power source (91) and the rectifier circuit (21). Yes.
- the fifteenth aspect is a power conversion device including the current estimation device (10) according to any one of the first to fourteenth aspects.
- the rectifier circuit is provided between a rectifier circuit (21) that rectifies AC power output from the AC power supply (91) and an inverter circuit (27) that is supplied with power from the rectifier circuit (21).
- the first estimation step for estimating the current (Iin) and the value correlated with the average value of the estimated power supply current (Iin) per predetermined time is the predetermined time of the current (Iinv) downstream of the capacitor (26).
- the voltage (Vac1, Vac2) that correlates with the power supply voltage (Vin) is detected by the voltage divider circuit, but the detection result (Vac1, Vac2) is not directly used for the estimation of the power supply current.
- gain correction is made, it is used to estimate the power supply current (Iin).
- the gain correlates with the value that correlates with the average value of the estimated power supply current (Iin) per predetermined time, and the value that correlates with the average value of the current (Iinv) downstream of the capacitor (26) per predetermined time. To be corrected.
- examples of the “value correlated with the average value” include the average value of the current (Iin, Iinv) per predetermined time itself, the integrated value of the current (Iin, Iinv) per predetermined time, and the like. That the value related to the estimated power supply current (Iin) matches the value related to the current (Iinv) on the downstream side of the capacitor (26) means that the current (Ic) flowing through the capacitor (26) obtained by calculation is predetermined. It means that the value correlated with the average value per time converges to zero.
- the gain correction as described above is performed on the detection result (Vac1, Vac2) of the voltage divider circuit, and both ends of the reactor (29) are based on the detection result (Vac1, Vac2) after the gain correction.
- a voltage (VL) is obtained, and a power supply current (Iin) is estimated based on the voltage (VL) at both ends.
- the power supply current (Iin) can be accurately calculated by using a voltage dividing circuit having a relatively simple configuration without using a current sensor or a current detection circuit.
- the power source current (Iin) can be accurately calculated using the voltage detection circuit (33) having a relatively simple configuration without using a current sensor or a current detection circuit.
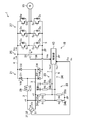
- FIG. 1 is a schematic configuration diagram of a power conversion device and a current estimation device according to the first embodiment.
- FIG. 2 is a diagram illustrating the voltage waveforms of the positive side voltage and the negative side voltage of the AC power supply and the waveforms of the detection results of the first voltage detection unit and the second voltage detection unit corresponding thereto.
- FIG. 3 is a diagram illustrating an overall flow of processing performed by the controller.
- FIG. 4 is a diagram showing the flow of gain correction processing.
- FIG. 5 is a diagram for explaining the timing at which the gain correction process and the offset correction process are performed. 6 shows a case where the gain correction processing according to FIG.
- FIG. 4 is performed when the gain of the first detection result is shifted to the plus side from the design value and the gain of the second detection result is shifted to the minus side from the design value. It is a figure which illustrates the process of.
- FIG. 7 is a diagram showing a flow of offset correction processing performed by the controller.
- FIG. 8 is a diagram for explaining the process of the offset correction process, and illustrates the state before the gain correction process and the offset correction process are started.
- FIG. 9 is a diagram illustrating the state after the gain correction processing is executed according to FIG. 4 in FIG.
- FIG. 10 is a diagram illustrating a state after the offset correction process is further executed in FIG. 9 according to FIG.
- FIG. 11 is a diagram for explaining an offset correction process according to the first modification.
- FIG. 12 is a diagram for explaining an offset correction process according to the second modification.
- FIG. 13 is a schematic configuration diagram of a power conversion device and a current estimation device according to the second embodiment.
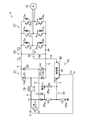
- FIG. 14 is a schematic configuration diagram of a power conversion device and a current estimation device according to the third embodiment.
- FIG. 15 is a schematic configuration diagram of a power conversion device and a current estimation device according to the fourth embodiment.
- FIG. 16 is a schematic configuration diagram of a power conversion device and a current estimation device according to the fifth embodiment.
- FIG. 17 is a list of correction processes recommended to be performed in each circuit pattern from the first embodiment to the fifth embodiment.
- Embodiment 1 ⁇ Overview> As shown in FIG. 1, the power converter (1) is connected to, for example, a single-phase AC power supply (91) and to a motor (95). When the AC power is supplied from the AC power supply (91), the power converter (1) converts the AC power into power having a predetermined frequency in the inverter circuit (27) and outputs the power to the motor (95). That is, the power conversion device (1) is a device for driving the motor (95).
- the motor (95) is a three-phase AC motor, for example, for driving a compressor connected to a refrigerant circuit of an air conditioner.
- the power conversion device (1) includes a current estimation device (10) that can accurately determine a power supply voltage (Iin) for controlling the inverter circuit (27) without using a current sensor and a current detection circuit.
- the current estimation device (10) includes a voltage detection circuit (33) including a voltage dividing circuit having a relatively simple configuration, and a voltage applied to the reactor (29) based on the detection result of the circuit (33) ( VL) can be obtained and used to estimate the power supply current (Iin) as accurately as possible.
- the power converter (1) of Embodiment 1 includes a converter circuit (21) (corresponding to a rectifier circuit), a DC link unit (25), an inverter circuit (27), a reactor (29), and a current estimation device (10 ).
- the current estimation device (10) includes various detection circuits (31, 32, 33, 36) and a controller (40) (corresponding to a calculation unit).
- the converter circuit (21) is connected to the AC power source (91) via the wiring (2, 3).
- the converter circuit (21) is a so-called diode bridge circuit in which a plurality (four in FIG. 1) of diodes (D1 to D4) are connected in a bridge shape.
- each cathode terminal of the diode (D1, D2) is connected to the power supply wiring (4), and each anode terminal of the diode (D3, D4) is connected to the GND wiring (5).
- the connection node between the anode terminal of the diode (D1) and the cathode terminal of the diode (D3) is connected to the wiring (2), and the connection node between the anode terminal of the diode (D2) and the cathode terminal of the diode (D4) is the wiring Connected to (3).
- the converter circuit (21) rectifies the alternating current output from the alternating current power source (91) into direct current.
- the wiring (2) is a wiring that connects the positive output terminal of the AC power supply (91) and the connection node between the diodes (D1, D3).
- the wiring (3) is a wiring that connects the negative output terminal of the AC power supply (91) and the connection node between the diodes (D2, D4).
- the DC link part (25) has a capacitor (26).
- the capacitor (26) is connected in parallel with the converter circuit (21) on the output side of the converter circuit (21). That is, the capacitor (26) is connected between the power supply wiring (4) and the GND wiring (5).
- the capacitor (26) is constituted by a film capacitor, for example.
- the capacity of the capacitor (26) is a static voltage that can smooth the ripple voltage (voltage fluctuation) generated corresponding to the frequency of the switching operation of the switching elements (Su, Sv, Sw, Sx, Sy, Sz) in the inverter circuit (27). Although it is an electric capacity, it can be an electric capacity which cannot smooth the voltage (voltage fluctuation resulting from a power supply voltage) rectified by the converter circuit (21). That is, the capacitor (26) absorbs voltage fluctuations due to switching of the inverter circuit (27) without absorbing voltage fluctuations from the converter circuit (21).
- the DC link section (25) receives the output of the converter circuit (21) and has a pulsation with a frequency pulsation approximately twice as high as the power supply voltage (Vin) of the AC power supply (91) from both ends of the capacitor (26). (Vdc) is output. That is, the DC link voltage (Vdc) corresponds to the voltage across the capacitor (26).
- the DC link voltage (Vdc) has a large pulsation such that the maximum value is about twice or more the minimum value.
- the inverter circuit (27) is connected in parallel to the capacitor (26) of the DC link section (25) on the output side of the converter circuit (21).
- the inverter circuit (27) is supplied with power from the converter circuit (21) via the DC link unit (25).
- the inverter circuit (27) is configured by bridge-connecting a plurality of switching elements (Su, Sv, Sw, Sx, Sy, Sz) (six for three-phase alternating current in FIG. 1).
- the inverter circuit (27) has three switching legs formed by connecting two switching elements (Su and Sx, Sv and Sy, Sw and Sz) in series with each other.
- the connection node between the upper arm switching element (Su, Sv, Sw) and the lower arm switching element (Sx, Sy, Sz) is a coil of each phase of the motor (95) (not shown). )It is connected to the.
- the inverter circuit (27) has a plurality of freewheeling diodes (Du, Dv, Dw, Dx, Dy, Dz) (six in FIG. 1). Each freewheeling diode (Du, Dv, Dw, Dx, Dy, Dz) is connected in antiparallel to each switching element (Su, Sv, Sw, Sx, Sy, Sz).
- the inverter circuit (27) having such a configuration switches the DC link voltage (Vdc) by the on / off operation of each switching element (Su, Sv, Sw, Sx, Sy, Sz), and the DC link voltage (Vdc ) To a three-phase AC voltage.
- the three-phase AC voltage is supplied to the motor (95).
- the reactor (29) is provided on the wiring (2) between the AC power supply (91) and the converter circuit (21).
- the voltage (VL) across the reactor (29) is obtained by calculation and used for estimating the power supply current (Iin), which will be described later.
- the various detection circuits include a power supply phase detection circuit (31) for detecting the power supply phase ( ⁇ in) of the AC power supply (91) and the frequency of the power supply voltage (Vin) of the AC power supply (91).
- Power supply frequency detection circuit (32) that detects (fin)
- voltage detection circuit (33) that detects voltage (Vac1, Vac2) that correlates with power supply voltage (Vin)
- DC voltage detection circuit (36) for detecting).
- the power conversion device (1) also has a detection unit that detects a current (Iinv) flowing through the downstream side of the capacitor (26) (that is, the inverter circuit (27) side). .
- the voltage detection circuit (33) is composed of a plurality of resistors (34a to 34c, 35a to 35c) (six in FIG. 1) as shown in FIG.
- the voltage detection circuit (33) includes a first voltage detection unit (V1) corresponding to a positive output voltage (V1) (hereinafter, positive voltage) of the AC power supply (91) in the power supply voltage (Vin). 34) and a second voltage detector (35) corresponding to the negative output voltage (V2) (hereinafter, negative voltage) of the AC power supply (91).
- the first voltage detector (34) is constituted by resistors (34a to 34c)
- the second voltage detector (35) is constituted by resistors (35a to 35c).
- one end of the resistor (34a) is connected between the AC power source (91) and the reactor (29) on the wiring (2).
- One end of the resistor (34b) is connected to GND.
- the other ends of the resistor (34a) and the resistor (34b) are connected to the controller (40) via the wiring (6).
- the resistor (34c) has one end connected to a power source having a voltage value (Vcc) and the other end connected to the wiring (6).
- one end of the resistor (35a) is connected to the wiring (3).
- One end of the resistor (35b) is connected to GND.
- the other ends of the resistor (35a) and the resistor (35b) are connected to the controller (40) via the wiring (7).
- the resistor (35c) has one end connected to a power supply having a voltage value (Vcc) and the other end connected to the wiring (7).
- the first voltage detection unit (34) and the second voltage detection unit (35) are configured by different voltage dividing circuits.
- the first voltage detection unit (34) uses, as the first detection result (Vac1), a voltage obtained by dividing the positive voltage (V1) of the AC power supply (91) by the resistors (34a to 34c). To detect.
- the second voltage detector (35) detects a voltage obtained by dividing the negative voltage (V2) of the AC power supply (91) by the resistors (35a to 35c) as a second detection result (Vac2).
- the resistance values of the resistors (34a to 34c, 35a to 35c) are defined as “R1, R2, R3, R4, R5, R6” in order
- the first and second detection results Vac1, Vac2 are It is shown by the following formula.
- the first and second detection results (Vac1, Vac2) obtained by the above equations (1) and (2) are input to the controller (40).
- the controller (40) basically calculates the difference between the first detection result (Vac1) and the second detection result (Vac2), and grasps the power supply voltage (Vin) using the calculation result.
- the voltage detection circuit (33) has a positive voltage (V1) and a negative voltage at the position between the AC power supply (91) and the converter circuit (21).
- the voltage (Vac1, Vac2) corresponding to each (V2) that is, the voltage (Vac1, Vac2) correlated with the power supply voltage (Vin) of the AC power supply (91) is detected. Therefore, the voltage detection circuit (33) can detect the voltages (Vac1, Vac2) even when the diodes (D1 to D4) of the converter circuit (21) are not conductive.
- FIG. 2 shows the waveforms of the first and second detection results (Vac1, Vac2) and the positive side voltage (V1) and negative side voltage (V2) corresponding to the first and second detection results (Vac1, Vac2).
- the waveforms are shown side by side.
- the first detection result (Vac1) and the positive voltage (V1) are the second detection result (Vac2) and the negative voltage. It can be said that it is more dominant than (V2).
- the power supply phase ( ⁇ in) is in the range of 180 ° to 360 °
- the second detection result (Vac2) and the negative voltage (V2) are higher than the first detection result (Vac1) and the positive voltage (V1).
- power supply first half a section in which the power supply phase ( ⁇ in) is 0 degrees to 180 degrees
- power supply latter half a section in which the power supply phase ( ⁇ in) is 180 degrees to 360 degrees
- the definitions of the first half of the power supply and the second half of the power supply are not limited to the above.
- the first half of the power supply may be 180 degrees to 360 degrees
- the second half of the power supply may be 0 degrees to 180 degrees.
- the first detection result (Vac1) is a value obtained by dividing the positive voltage (V1)
- the first detection result is obtained even if the positive voltage (V1) is approximately 0V in the latter half of the power supply.
- (Vac1) is not 0V.
- the second detection result (Vac2) is a value obtained by dividing the negative side voltage (V2), even if the negative side voltage (V2) is approximately 0 V in the first half of the power supply, the second detection result is obtained.
- the result (Vac2) is not 0V.
- the controller (40) is configured by a microcomputer including a CPU and a memory, for example.
- the controller (40) is connected to various detection circuits (31, 32, 33, 36), and although not shown, the switching elements (Su, Sv, Sw, Sx, Sy) in the inverter circuit (27) , Sz) is connected to the gate terminal.
- the controller (40) is configured to switch the switching elements (Su, Sv, Sw) so that the motor (95) can rotate at a desired rotational speed based on the detection results of the various detection circuits (31, 32, 33, 36). , Sx, Sy, Sz) are controlled.
- the controller (40) of the first embodiment uses the first and second detection results (Vac1, Vac2) and the like input from the voltage detection circuit (33), and the voltage across the reactor (29) ( VL) is accurately determined. Then, the controller (40) calculates the power source current (Iin) for use in inverter control including control of power source harmonics based on the obtained voltage (VL) across the reactor (29). Performs accurate estimation using both-end voltage (VL).
- the capacitor (26) has a small capacity that can only smooth the ripple voltage generated corresponding to the switching frequency of the switching elements (Su, Sv, Sw, Sx, Sy, Sz) in the inverter circuit (27).
- the controller (40) controls the driving of the switching elements (Su, Sv, Sw, Sx, Sy, Sz) in the inverter circuit (27) so that the power supply harmonics are as small as possible. In order to perform such control, a power supply current (Iin) is required.
- the power supply current (Iin) is detected using a current detection circuit using a CT (Current Transformer) or a shunt resistor.
- CT Current Transformer
- shunt resistor a current detection circuit using a CT (Current Transformer) or a shunt resistor.
- the current estimation device (10) when the first and second detection results (Vac1, Vac2), which are voltages correlated with the power supply voltage (Vin), are detected by the voltage detection circuit (33), The voltage (VL) across the reactor (29) is accurately calculated based on the second detection result (Vac1, Vac2), and the power supply current (Iin) is calculated based on the voltage across the reactor (29) (VL). ) Is estimated. That is, in the first embodiment, the CT and the current detection circuit for detecting the power supply current (Iin) are unnecessary. Therefore, the current estimation device (10) according to the first embodiment has a simpler configuration than the method of directly detecting the power supply current (Iin) using CT or a current detection circuit, and can suppress an increase in cost.
- FIG. 3 is a flowchart schematically showing the overall processing flow performed by the controller (40).
- the controller (40) calculates the power supply voltage (Vin) using the first and second detection results (Vac1, Vac2) of the voltage detection circuit (33). Processing is performed (step S1). Thereafter, the controller (40) performs a calculation process of the voltage (VL) across the reactor (29) (step S2). Thereafter, the controller (40) performs a calculation process of the power supply current (Iin) (step S3). If the power supply current (Iin) obtained in this way satisfies a predetermined standard (Yes in step S4), the series of processes in FIG.
- step S4 the controller (40) repeats the operations after step S1.
- the controller (40) performs gain correction processing and offset correction processing on the first and second detection results (Vac1, Vac2) of the voltage detection circuit (33) (step S1). S5).
- step S1- Power supply voltage (Vin) calculation process (step S1)-
- the portion of “R L1 / (R L1 + R1)” in the first term on the right side of the above equation (1) represents the gain of the first detection result (Vac1), and is the first on the right side of the above equation (2).
- the part of “R L2 / (R L2 + R2)” of the term represents the gain of the second detection result (Vac2).
- the part of “(R1 / (R L1 + R1)) ⁇ (R2 / (R2 + R5))” in the second term on the right side of the above formula (1) represents the offset of the first detection result (Vac1).
- the part “(R3 / (R L2 + R3)) ⁇ (R4 / (R4 + R6))” represents the offset of the second detection result (Vac2).
- step S5 the controller (40) corrects the gain and offset of the first and second detection results (Vac1, Vac2) of the voltage detection circuit (33) by the following equation (3).
- G1 is a gain correction coefficient for correcting the gain of the first detection result (Vac1)
- G2 is a gain correction coefficient for correcting the gain of the second detection result (Vac2)
- offset is An offset correction coefficient (that is, offset deviation) is represented.
- the controller (40) multiplies each voltage (Vac1, Vac2), which is the detection result of the voltage detection circuit (33), by the gain correction coefficient (G1, G2), and then the multiplication result Subtract each other. Thereby, the controller (40) can obtain the power supply voltage (Vin) in which the influence of the carrier noise is canceled and the gain is corrected. Furthermore, the controller (40) can obtain a power supply voltage (Vin) with further offset correction by adding an offset correction coefficient (offset) to the value obtained by subtracting the multiplication results. it can.
- the gain correction coefficients (G1, G2) and the offset correction coefficient (offset) used in the above equation (3) are gradually increased.
- the gain correction process and the offset correction process are performed.
- the gain correction process and the offset correction process are repeatedly performed until the power supply current (Iin) satisfies a predetermined standard.
- the gain correction coefficient (G1, G2) and the offset correction coefficient How to adjust (offset) will be described in detail in “ ⁇ Gain correction coefficient adjustment processing>” “ ⁇ Offset correction coefficient adjustment processing>”.
- Step S2 A controller (40) calculates
- the controller (40) when the controller (40) according to the first embodiment obtains the voltage (VL) across the reactor (29), as shown in the following equation (4), the power supply voltage (Vin) and the DC link voltage (Vdc ) In addition to the voltage drop (VR) of the reactor (29) and the voltage drop (2Vdb) generated by the diodes (D1 to D4) of the converter circuit (21) (specifically, two diodes (D1, D4) is used.
- each value of the two voltage drops (VR, 2Vdb) in the above equation (4) is preferably determined in strict consideration. This is because the calculation error of the voltage (VL) across the reactor (29) appears more greatly as these values deviate from the actual values.
- the power supply current (Iin) is calculated by the integral calculation according to the following equation (5), each value of these voltage drops (VR, 2Vdb) is not accurately taken into consideration. This greatly affects the calculation of the power supply current (Iin). Accordingly, it is preferable to obtain appropriate values for the voltage drop (VR, 2Vdb) by calculation, actual detection operation, and the like. For example, when the voltage drop (VR) of the reactor (29) is detected by a detection circuit (not shown), the error in the detection circuit including the detection gain and offset is appropriately corrected to minimize the calculation error as much as possible. It ’s good to keep it.
- step S3 the controller (40) obtains the power supply current (Iin) using the voltage (VL) across the reactor (29) obtained by the above equation (4).
- the controller (40) estimates the power source current (Iin) by integrating the voltage (VL) across the reactor (29).
- the power supply current (Iin) is obtained by calculation, there is a method of the following equation (6) that focuses on the circuit configuration separately from the above equation (5).
- the current (Iinv) flowing to the inverter circuit (27) side detected by the detection unit (not shown) is the current flowing to the capacitor (26) obtained by the differential calculation of the DC link voltage (Vdc). It shows that the power supply current (Iin) can be obtained by adding (Ic).
- the power supply current calculated by the above formula (5) is expressed as “Iin1”, so that it can be understood from which formula the power supply current (Iin) is calculated.
- the power supply current calculated by the above equation (6) is represented as “Iin2”.
- the above equation (6) is easily affected by high frequency noise because the capacitor current (Ic) is obtained by differential operation. Therefore, there is a problem when the power supply current (Iin2) obtained by the above equation (6) is used in, for example, single-phase capacitor-less harmonic control. Therefore, in the first embodiment, when calculating the power supply current (Iin) for controlling the single-phase capacitor-less inverter, the power supply current (Iin1) calculated using the above equation (5) is used.
- Step S4 -Judgment process of whether or not the power supply current (Iin) satisfies a predetermined standard.
- the power supply current (Iin1) obtained by Expression (5) is affected by the detection error of the voltage detection circuit (33) itself. If offset correction and gain correction are performed, the calculation result of Expression (3) changes, and accordingly, the power supply current (Iin1) obtained by Expression (5) also changes.
- the power supply current (Iin2) obtained by the above equation (6) does not receive the detection error of the voltage detection circuit (33) itself, as is apparent from the above equation (6).
- the controller (40) determines whether or not the power supply current (Iin2) obtained by the above equation (6) is a value with a high accuracy from the power supply current (Iin1) obtained by the equation (5). It is used as a predetermined standard for judging. That is, the controller (40) of the first embodiment determines whether or not these corrections are appropriately performed during the gain correction and the offset correction, and determines the power supply current (Iin2) obtained by the above equation (6). Judgment is made as to what value the power supply current (Iin1) obtained by the above equation (5) takes as a reference.
- the controller (40) determines that the power supply current (Iin1) obtained by the above equation (5) matches the power supply current (Iin2) obtained by the above equation (6). Is synonymous with the calculation result of the current (Ic) flowing in the capacitor (26) represented in the second term on the right side of the above equation (6) converges to zero, and is obtained by the above equation (5). It is determined that the power supply current (Iin1) satisfies a predetermined standard, and the power supply current (Iin1) obtained by the above equation (5) is determined as a parameter used for inverter control. However, if the power supply current (Iin1) obtained by the above equation (5) is different from the power supply current (Iin2) obtained by the above equation (6), the controller (40) Repeat the gain correction and offset correction until it matches the power supply current (Iin2).
- Gain correction coefficient (G1) for correcting the gain portion “R L1 / (R L1 + R1)” “R L2 / (R L2 + R3)” in the first term on the right side of the above equations (1) and (2) , G2) the controller (40) of the first embodiment gradually adjusts the gain correction coefficient (G1, G2) so that the variation of the components of the voltage detection circuit (33) can be reliably absorbed. I do.
- FIG. 4 shows in detail the flow of adjustment processing of the gain correction coefficients (G1, G2).
- FIG. 5 shows the detection results (Vac1, Vac2) of the voltage detection circuit (33) arranged one above the other, and the types of detection results that are dominant with respect to the power supply voltage (Vin) in the last half cycle of the power supply.
- the gain correction coefficient to be adjusted is shown for each power supply zero cross.
- the controller (40 ) As a premise, all the detection circuits (31, 32, 33, 36) always perform detection operation regardless of whether the gain correction coefficient (G1, G2) is corrected or not, and the controller (40 ) Assumes that the power source current (Iin1) is calculated using the above equations (3) to (5). Furthermore, regardless of whether the gain correction coefficient (G1, G2) is corrected or not, the controller (40) detects the current (Iinv) flowing to the inverter (27) detected by the detection unit (not shown) and the DC voltage. It is assumed that the DC link voltage (Vdc) detected by the detection circuit (36) is also used in the above equation (6) to calculate the power supply current (Iin2). These calculation results are sequentially stored in a memory (not shown).
- the controller (40) grasps the power zero cross timing based on the power phase ( ⁇ in) (step S10).
- the controller (40) calculates the calculation result of the above equation (5), that is, the integral value of the voltage (VL) across the reactor (29) per predetermined time.
- a value correlated with the average value that is, the average value per predetermined time of the power supply current (Iin1)) is calculated as the first value.
- the controller (40) determines a predetermined value of the calculation result of the above equation (6), that is, the total value of the differential value of the DC link voltage (Vdc) and the detected current (Iinv) flowing to the inverter (27) side.
- a value correlated with an average value per time is calculated as the second value.
- the controller (40) integrates the calculation result (Iin1) of the above equation (5) for a predetermined time (iin_sum1), and divides this by the number of integrations cut_sum, thereby obtaining the first value that is a simple average value.
- the controller (40) integrates the calculation result (Iin2) of the above equation (6) for a predetermined time (iin_sum2), and divides this by the number of integrations cut_sum, thereby obtaining a second value that is a simple average value. Is calculated (iin_sum2 / cut_sum).
- the predetermined time is set to the power supply half cycle section “B” immediately before it in the adjustment process of the gain correction coefficient at the power supply zero cross timing “A” in FIG. That is, the controller (40) sets the simple average value of the calculation result (Iin1) of the above formula (5) in the section B, which is the immediately preceding power supply half cycle section, as the first value, and the above formula (6) in the section B.
- the simple average value of the calculation result (Iin2) is obtained as the second value.
- the first embodiment calculates how much the first value deviates from the second value toward the plus side or the minus side with reference to the second value that is the value of the differential operation.
- the first value and the second value may be values correlated with the average value, and are not necessarily limited. It does not have to be an average value.
- the first value may be a value (iin_sum1) obtained by integrating the calculation result (Iin1) of the above formula (5) for a predetermined time
- the second value is the calculation result (Iin2) of the above formula (6).
- the controller (40) determines that the detection result that is dominant over the power supply voltage (Vin) in the power supply half cycle immediately before the current power supply zero crossing is the first and second detection results (Vac1, Vac2). It is determined which one of them (step S12). From the determination result, the controller (40) determines a gain correction coefficient (G1, G2) to be adjusted at the present time.
- the controller (40) determines the gain correction coefficient “G2” corresponding to the detection result “Vac2” as an adjustment target.
- Step S12 the controller (40) determines the difference (iin_err) between the first value and the second value obtained in Step S11. Is a positive value or a negative value, that is, whether the first value is on the positive side or the negative side is determined based on the second value (step S13).
- step S13 when the difference (iin_err) is a positive value (Yes in step S13), the controller (40) decreases the gain correction coefficient (G1) (step S14). Conversely, when the difference (iin_err) is a negative value (No in step S13), the controller (40) increases the gain correction coefficient (G1) (step S15).
- step S12 when the determination result is the detection result “Vac2” (No in step S12), the controller (40) calculates the first value and the second value obtained in step S11 as in step S13. It is determined whether the difference (iin_err) is a positive value or a negative value (step S16).
- step S16 if the difference (iin_err) is a positive value (Yes in step S16), the controller (40) decreases the gain correction coefficient (G2) (step S17). Conversely, when the difference (iin_err) is a negative value (No in step S16), the controller (40) increases the gain correction coefficient (G2) (step S18).
- the controller (40) clears the first value and the second value obtained in step S11 (step S19).
- the controller (40) applies the gain correction coefficients (G1, G2) adjusted in steps S14, S15, S17, and S18 to the above equation (3), thereby obtaining the above equation (3).
- Update. the controller (40) uses the above equation (4) and the above equation (5) in addition to the updated equation (3), as described in order in steps S1 to S3 in FIG.
- the voltage (Vin), the voltage (VL) across the reactor (29), and the power supply current (Iin1) by the integration method are successively calculated (S20).
- the controller (40) obtains again the first value and the second value in the period of the power supply half cycle immediately before the timing at the timing of the power supply zero cross where one power cycle has elapsed from the timing of step S19. Calculate the difference (iin_err). The controller (40) determines whether or not the difference (iin_err) is substantially zero (that is, whether or not the first value matches the second value).
- step S21 when the difference (iin_err) is not substantially zero (that is, when the first value does not coincide with the second value) (No in step S21), the controller (40) repeats the operation after step S10 again.
- step S21 when the difference (iin_err) is substantially zero (that is, when the first value substantially coincides with the second value) (Yes in step S21), the controller (40) uses the gain correction coefficient ( G1, G2) are determined to have been adjusted to such an extent that variations in the voltage detection circuit (33) can be absorbed, and the series of operations for adjusting the gain correction coefficients (G1, G2) are terminated.
- step S10 to step S21 are repeated until the gain correction coefficient (G1, G2) is adjusted to such an extent that variations in the voltage detection circuit (33) can be absorbed.
- Satisfaction of step S21 means that when the first value matches the second value, the current flowing in the capacitor (26) according to the equation (6), which is a reference for adjusting the gain correction coefficients (G1, G2) (Ic) means that the value correlated with the average value per predetermined time (here, power supply half cycle) of (differential calculation part) has converged to zero.
- steps S11 to S21 representing gain correction (specifically, adjustment of gain correction coefficient)
- steps S13 to S15 represent the process of adjusting the gain correction coefficient (G1) that contributes to the first half of the power supply.
- steps S16 to S18 represent the process of adjusting the gain correction coefficient (G2) that contributes to the latter half of the power supply.
- FIG. 6 illustrates the process of adjusting the gain correction coefficient (G1, G2) described above.
- (a) of FIG. 6 shows the calculation result (Iin2) of Expression (6) and the calculation result of Expression (5) before the adjustment process of the gain correction coefficient (G1, G2) is executed.
- (Iin1). 6A shows a state where the gain of the first voltage detector (34) is shifted from the design value to the plus side, and the gain of the second voltage detector (35) is shifted from the design value to the minus side. Is illustrated.
- the current value of the power source current (Iin1) is generally higher than the reference power source current (Iin2).
- the latter half of the power source in which the second detection result (Vac2) is dominant the current value of the power source current (Iin1) is generally lower than the reference power source current (Iin2).
- the case where the first voltage detection unit (34) detects a voltage value larger than the voltage value to be actually detected due to the influence of the variation of the component parts means a case where the second voltage detection unit (35) detects a voltage value smaller than the voltage value to be actually detected due to the influence of the variation of the component parts.
- step S14 in FIG. 4 represents the case where step S14 in FIG. 4 is performed on the first half of the power supply from the state in (a) in FIG.
- the gain correction coefficient (G1) that contributes to the first half of the power source is adjusted to the extent that the variation of the first voltage detection unit (34) can be absorbed in step S14, the power source according to the recalculated equation (5) is adjusted.
- the current (Iin1) substantially matches the power supply current (Iin2) of the reference equation (6).
- steps S15 to S17 have not been performed yet, the power supply current (Iin1) and the power supply current (Iin2) are still different in the latter half of the power supply.
- step S18 in FIG. 4 represents the case where step S18 in FIG. 4 is performed on the latter half of the power source from the state in (b) in FIG.
- the gain correction coefficient (G2) contributing to the second half of the power source is adjusted to the extent that the variation of the second voltage detection unit (35) can be absorbed in step S18, the power source according to the recalculated equation (5) is adjusted.
- the current (Iin1) substantially matches the power supply current (Iin2) of the reference equation (6) from the first half of the power supply to the second half of the power supply.
- the individual difference in the gain of the voltage detection circuit (33) including the first and second voltage detection units (34, 35) may affect the estimation of the power supply current (Iin1). Can be said to be reduced.
- the controller ( 40) further adjusts the offset correction coefficient (offset).
- FIG. 7 shows in detail the flow of the offset correction coefficient (offset) adjustment process.
- the offset correction process (that is, the adjustment process of the offset correction coefficient (offset)) according to the first embodiment is performed after the gain correction process (that is, the adjustment process of the gain correction coefficient (G1, G2)) of FIG. 4 described above. Is called.
- the controller (40) uses the above equation (5) to calculate the power supply current (Iin1), that is, the power supply current (Iin1) based on the integrated value of the voltage (VL) across the reactor (29). (Corresponding to the third value) and the power supply current (Iin2) based on the differential value of the voltage (Vdc) across the capacitor (26) using the above equation (6) (fourth) (Equivalent to the value).
- the controller (40) Fourier-transforms each of these power supply currents (Iin1, Iin2).
- the controller (40) calculates, for each power supply current (Iin1, Iin2), the double frequency component of the power supply frequency and the amplitude (iin_amp1, iin_amp2) at the double frequency component. Obtain (step S31).
- the controller (40) compares each amplitude (iin_amp1, iin_amp2) obtained in step S31 with a predetermined value (step S32). When at least one of the amplitudes (iin_amp1, iin_amp2) is larger than a predetermined value, the process of the controller (40) performs the operation after step S33. However, if both amplitudes (iin_amp1, iin_amp2) are smaller than the predetermined value (No in step S32), the controller (40) does not perform the processing after step S33 (ie, offset correction processing), and the first in FIG. The process proceeds to step S10.
- the predetermined value is set to the minimum amplitude (iin_amp1, iin_amp2) when the phase of each power supply current (Iin1, Iin2) and the phase difference thereof can be accurately calculated. Is preferred. That is, step S32 is a process performed because the phase and phase difference in the next step S33 cannot be accurately calculated if the amplitude (iin_amp1, iin_amp2) of the double frequency component of the power supply frequency is too small.
- step S32 when at least one of the amplitudes (iin_amp1, iin_amp2) is larger than a predetermined value (Yes in step S32), the controller (40) includes the various detection circuits (31, 32, 33, 36) and step S31.
- the controller (40) is based on the power supply current (Iin2) according to the above equation (6) including the differential operation, and the positive side of the power supply current (Iin1) according to the above equation (5). Or it is calculated as a phase difference (inn_phase_err) whether it is deviating to the minus side.
- the above steps S31 to S33 are performed at the timing of power supply zero crossing, as in the gain correction coefficient adjustment process.
- the controller (40) calculates the calculation result (that is, the power supply) in the power supply half cycle section “B” immediately before that.
- the current Iin1) and the calculation result of the above equation (6) in the section B that is, the power supply current Iin2) are obtained.
- the controller (40) determines that the detection result that is dominant over the power supply voltage (Vin) in the power supply half cycle immediately before the current power supply zero crossing is the first and second detection results (Vac1, Vac2). It is determined which of them is (step S34). For example, in the adjustment processing of the offset correction coefficient at the power supply zero cross “A” in FIG. 5, the detection result that is dominant during the power supply half cycle section “B” immediately before is “Vac2”. In this case, the controller (40) proves that the power supply half cycle section “B” immediately before the current power supply zero cross “A” was dominant in the power supply latter half.
- Step S34 determines whether the phase difference (inn_phase_err) obtained in Step S33 is a negative value or a positive value. That is, it is determined whether the power source current (Iin1) (third value) is on the plus side or the minus side on the basis of the power source current (Iin2) (fourth value) (step S35).
- step S35 when the phase difference (inn_phase_err) is a positive value (Yes in step S35), the controller (40) increases the offset correction coefficient (offset) (step S36). Conversely, when the phase difference (inn_phase_err) is a negative value (No in step S35), the controller (40) decreases the offset correction coefficient (offset) (step S37).
- step S34 when the determination result is the second detection result “Vac2” (No in step S34), the controller (40) adds the phase difference (inn_phase_err) obtained in step S33 to the same value as in step S35. It is determined whether the value is a negative value or a negative value (step S38).
- step S38 when the phase difference (inn_phase_err) is a positive value (Yes in step S38), the controller (40) decreases the offset correction coefficient (offset) (step S39). Conversely, when the phase difference (inn_phase_err) is a negative value (No in step S38), the controller (40) increases the offset correction coefficient (offset) (step S40).
- the phase difference (inn_phase_err) is a positive value or a negative value.
- the contents of control for changing the magnitude of the offset correction coefficient (offset) in accordance with the determination that is, the magnitude relationship of the phases (inn_phase1, inn_phase2)) is the opposite.
- the adjustment range of the offset correction coefficient (offset) is set so that the phase difference (inn_phase_err) converges to zero, that is, the phase (inn_phase1) of the power supply current (Iin1) that is the third value.
- Is preferably determined in accordance with the phase difference (inn_phase_err) so that it substantially coincides with the phase (inn_phase2) of the power supply current (Iin2) which is the fourth value.
- step S36 After step S36, S37, S39, S40, the process of the controller (40) proceeds to step S21 in FIG.
- the controller (40) determines the phase (inn_phase1) of the power supply current (Iin1) based on the adjusted offset correction coefficient (offset). ), And the difference between the phase (inn_phase1) of the power supply current (Iin1) and the phase (inn_phase2) of the reference power supply current (Iin2), and the phase difference (inn_phase_err) is almost zero You may confirm that it has converged.
- FIG. 8A shows the power supply current (Iin2) according to the reference equation (6) and the power supply current (Iin1) according to the equation (5) before the offset correction coefficient (offset) adjustment processing is executed.
- FIG. 8B shows each power source current (Iin1, Iin2) of FIG. 8A as a frequency component twice the power source frequency. In the states of FIGS. 8A and 8B, neither gain correction nor offset correction has been performed yet.
- the power supply current (Iin1) in the first half of the power supply, the power supply current (Iin1) is generally lower than the reference power supply current (Iin2), and in the second half of the power supply, the reference power supply current ( The power supply current (Iin1) is generally higher than Iin2). From (b) of FIG.
- phase (inn_phase1) of the power supply current (Iin1) is advanced with respect to the reference power supply current (Iin2), and when the phase (inn_phase2) of the power supply current (Iin2) is used as a reference,
- the phase difference (inn_phase_err) between the currents (Iin1, Iin2) appears to be negative.
- FIG. 9 shows a state after the adjustment processing of the gain correction coefficients (G1, G2) is first performed according to FIG. 4 from the state of FIG. Specifically, FIG. 9A shows the power supply current (Iin2) according to the reference equation (6) and the equation (5) after only the adjustment processing of the gain correction coefficient (G1, G2) is executed. Represents the power supply current (Iin1).
- FIG. 9B shows each power source current (Iin1, Iin2) of FIG. 9A as a frequency component twice the power source frequency.
- the gain correction coefficient (G1) is adjusted by step S15 of FIG. 4 to such an extent that the variation of the first voltage detection section (34) can be absorbed, and for the second half of the power supply, by step S17 of FIG. FIG.
- FIG. 10 shows a state after the adjustment processing of the offset correction coefficient (offset) is further performed according to FIG. 7 from the state of FIG. Specifically, FIG. 10A shows the power supply current (Iin2) according to the reference expression (6) and the power supply current according to the expression (5) after the adjustment processing of the offset correction coefficient (offset) is executed. (Iin1).
- FIG. 10B shows each power source current (Iin1, Iin2) of FIG. 10A as a frequency component twice the power source frequency. As described in FIG. 9B, since the phase difference (inn_phase_err) between the power supply currents (Iin1, Iin2) is a positive value, according to step S36 or step S39 in FIG.
- the offset correction coefficient (offset) was adjusted to such an extent that variations in the two voltage detectors (34, 35) could be absorbed. Therefore, in FIG. 10, not only does the power source current (Iin1) according to the recalculated equation (5) match the current value of the power source current (Iin2) according to the reference equation (6), but also each power source current (Iin1, Iin2 ) Phases (inn_phase1, inn_phase2) also substantially coincide from the first half of the power supply to the second half of the power supply.
- the voltage (Vac1, Vac2) correlated with the power supply voltage (Vin) is detected by the voltage detection circuit (33), but the first and second detection results (Vac1, Vac2) are used as they are.
- the voltage (VL) across the reactor (29) is used for estimation of the power supply current (Iin) after calculation after gain correction.
- the gain is a value that correlates with the average value of the estimated power supply current (Iin) per predetermined time, and the current flowing to the inverter (27) side (that is, the current downstream of the capacitor (26)) (Iinv) Correction is made so as to coincide with a value correlated with an average value per predetermined time.
- the power supply current (Iin) can be accurately calculated using the voltage detection circuit (33) having a relatively simple configuration without using a current sensor or a current detection circuit.
- the capacitor (26) has a relatively small capacity so as to absorb the voltage fluctuation due to switching of the inverter circuit (27) without absorbing the voltage fluctuation from the converter circuit (21). It has become a thing. Therefore, the capacitor (26) cannot smooth the ripple voltage caused by the power supply frequency of the AC power supply (91) and is likely to generate power supply harmonics, so that the power supply harmonics become as small as possible. In addition, it is necessary to control the inverter circuit (27) using the power supply current. On the other hand, in the first embodiment, as described above, an accurate power supply current (Iin) is estimated. Therefore, the control of the inverter circuit (27) that suppresses the power supply harmonics is also more accurate.
- Iin an accurate power supply current
- a controller (40) is further based on the voltage drop (VR) of a reactor (29), and both-ends voltage of a reactor (29) Find (VL). Thereby, the both-ends voltage (VL) of a reactor (29) is calculated
- the controller (40) further includes the reactor (29) based on the voltage drop (Vdb) generated in the diodes (D1 to D4) as shown in the above equation (4).
- the voltage across both ends (VL) is obtained.
- the both-ends voltage (VL) of a reactor (29) is calculated
- the controller (40) determines that the value correlated with the estimated average value of the power source current (Iin) per predetermined time is a predetermined time of the current (Iinv) flowing through the inverter (27).
- Gains of the first detection result (Vac1) of the first voltage detection unit (34) and the second detection result (Vac2) of the second voltage detection unit (35) so as to coincide with a value correlated with the average value of And the voltage (VL) across the reactor (29) is obtained based on the difference between the first detection result (Vac1) after gain correction and the second detection result (Vac2) after gain correction.
- VL highly accurate voltage across the reactor (29) in which the influence of carrier noise is canceled is obtained.
- the controller (40) determines the first value related to the integral value at the voltage (VL) across the reactor (29) and the differential value at the voltage (Vdc) across the capacitor (26).
- the average value per predetermined time of the current (Iinv) flowing through the inverter (27) is a value that correlates with the average value per predetermined time of the estimated power source current (Iin) by matching the related second value.
- the gains of the first and second detection results (Vac1, Vac2) of the voltage detection circuit (33) are corrected so as to coincide with the values correlated with. Thereby, the gain correction of the first and second detection results (Vac1, Vac2) is performed with high accuracy.
- the predetermined time is set to a half cycle of the AC power source (91).
- the controller (40) includes the phase of the power supply current (Iin1) based on the integral value of the voltage (VL) across the reactor (29) and the voltage across the capacitor (26) (Vdc).
- the offset of the detection result (Vac1, Vac2) of the voltage detection circuit (33) is corrected so that the phase of the power supply current (Iin2) based on the differential value matches.
- the offset correction of the first and second detection results (Vac1, Vac2) is performed with high accuracy.
- the voltage (VL) across the reactor (29) can be obtained more accurately based on the first and second detection results (Vac1, Vac2) subjected to offset correction as well as gain correction, the voltage across the terminal ( The power supply current (Iin) estimated based on (VL) can be closer to the actual value.
- the controller (40) calculates the amplitude (inn_amp1, inn_amp2) at a frequency component that is a predetermined multiple of the power supply frequency for each power supply current (Iin1, Iin2), and the amplitude (inn_amp1, Only when inn_amp2) is larger than a predetermined value, it is determined that the phase of each power supply current (Iin1, Iin2) can be accurately calculated, and the offset of the first and second detection results (Vac1, Vac2) is corrected. Thereby, it can suppress that the precision of offset correction falls.
- the controller (40) performs the gain correction of the first and second detection results (Vac1, Vac2), and then performs the offset correction of the first and second detection results (Vac1, Vac2). I do. This makes it easier to perform offset correction during offset correction.
- the adjustment processing of the offset correction coefficient (offset) may be other than the method according to FIG.
- the controller (40) obtains a deviation of the offset from the original design value from each detection result (Vac1, Vac2) of the voltage detection circuit (33), and uses the deviation as an offset correction coefficient. (Offset).
- FIG. 11 shows the positive side voltage (V1) and the negative side voltage (V2) corresponding to each detection result (Vac1, Vac2) of the voltage detection circuit (33).
- the positive side voltage (V1) is dominant in the first half of the power supply voltage (Vin), but not in the second half of the power supply. Therefore, the positive side voltage (V1) should be constant at about 0V in design in the latter half of the power supply.
- the negative side voltage (V2) is dominant in the latter half of the power supply voltage (Vin), but is not dominant in the first half of the power supply. Therefore, the negative voltage (V2) should be constant at the voltage value of “0 V” in the design in the first half of the power supply.
- the actual voltage value is not constant at “0V” in the second half of the power supply for the positive voltage (V1) and the first half of the power supply for the negative voltage (V2). This is because the actual offset value deviates from the original design value of the offset due to variations (individual differences and temperature characteristics).
- the controller (40) determines whether the first detection result (Vac1) of the voltage detection circuit (33) is between the second half of the power supply (specifically, the power supply phase ( ⁇ in)). Is calculated from an average value of 180 degrees to 360 degrees), the offset of the first voltage detector (34) in the voltage detection circuit (33) is detected. For the second detection result (Vac2), the controller (40) calculates the average value during the first half of the power supply (specifically, the section where the power supply phase ( ⁇ in) is 0 degrees to 180 degrees). Thus, the offset of the second voltage detector (35) in the voltage detection circuit (33) is detected.
- the controller (40) determines the difference between the offset of the first voltage detector (34) and the offset of the second voltage detector (35) as an offset correction coefficient (offset). That is, in this method, the offset correction coefficient (offset) is obtained using both the first detection result (Vac1) and the second detection result (Vac2) of the voltage detection circuit (33).
- the controller (40) may obtain the offset correction coefficient (offset) using only the first detection result (Vac1) of the voltage detection circuit (33) or only the second detection result (Vac2). . Further, the controller (40) may obtain an average value of the power supply latter half of the first detection result (Vac1) and the power supply first half of the second detection result (Vac2).
- the controller (40) does not use the difference between the offset of the first voltage detector (34) and the offset of the second voltage detector (35) as an offset correction coefficient (offset), but the following method May be used.
- the controller (40) detects the accurate first detection result (Vac1) by correcting the first detection result (Vac1) using the offset of the first voltage detection unit (34). Further, the controller (40) detects the accurate second detection result (Vac2) by correcting the second detection result (Vac2) using the offset of the second voltage detection unit (35). In this case, the controller (40) determines the difference between the accurate detection results (Vac1, Vac2), that is, the accurate detection results (Vac1, Vac2) as the first and second terms on the right side of Equation (3). By using this, an accurate power supply voltage (Vin) can be calculated.
- the offset shift is performed.
- An offset correction coefficient (offset), which is a minute, can be easily obtained.
- the current estimation device (10) can obtain the voltage (VL) across the reactor (29) with higher accuracy using the detection results (Vac1, Vac2) of the voltage detection circuit (33) after offset correction. .
- the controller (40) calculates the power supply voltage (Vin) based on the detection results (Vac1, Vac2) of the voltage detection circuit (33), and the calculation result (power supply voltage (Vin by calculation) )), The offset deviation from the original design value is obtained, and the deviation is set as an offset correction coefficient (offset).
- the controller (40) calculates the power supply voltage (Vin) by applying each detection result (Vac1, Vac2) of the voltage detection circuit (33) to the above equation (3).
- Vin the power supply voltage
- the adjustment process of the offset correction coefficient (offset) is performed after the adjustment process of the gain correction coefficient (G1, G2) is illustrated (FIGS. 4 and 7).
- the gain correction coefficients (G1, G2) have been adjusted.
- controller (40) grasps the timing of the power supply zero cross of the AC power supply (91) based on the power supply phase ( ⁇ in) of the AC power supply (91) by the power supply phase detection circuit (31).
- the controller (40) obtains the voltage value of the power supply voltage (Vin) obtained by calculation near the power supply zero cross of the AC power supply (91), and based on the obtained voltage value.
- the offset correction coefficient (offset) is adjusted. Specifically, when the voltage value of the power supply voltage (Vin) near the power supply zero cross is positive, the controller (40) decreases the offset correction coefficient (offset) and the power supply voltage (Vin near the power supply zero cross). ) Is positive, an adjustment is made to increase the offset correction coefficient (offset).
- the controller (40) performs offset correction of the first detection result (Vac1) and the second detection result (Vac2) of the voltage detection circuit (33) using the obtained offset correction coefficient (offset).
- the voltage value of the power supply voltage (Vin) near the zero cross of the AC power supply (91) corresponds to the offset deviation.
- the offset deviation as the offset correction coefficient (offset) can be easily obtained.
- the current estimation device (10) can obtain the voltage (VL) across the reactor (29) with higher accuracy using the detection results (Vac1, Vac2) of the voltage detection circuit (33) after offset correction. .
- the controller (40) subtracts the magnitude of the voltage value of the power supply voltage (Vin) near the power supply zero cross from the offset design value, and the subtraction result is offset correction coefficient (offset). ) May be set.
- Embodiment 2 shows an example in which the circuit configurations of the power conversion device (1) and the current estimation device (10) are different from those of the first embodiment.
- the second embodiment shown in FIG. 13 and the first embodiment shown in FIG. 1 differ in the position of the reactor (29) and the detection position of the voltage detection circuit (33).
- the reactor (29) is connected on the power supply wiring (4) between the converter circuit (21) and the capacitor (26) of the DC link section (25). That is, it can be said that the reactor (29) according to the second embodiment is located not on the AC side but on the DC side.
- the voltage detection circuit (33) is provided on the input side of the reactor (29) between the converter circuit (21) and the capacitor (26) of the DC link unit (25).
- the voltage detection circuit (33) is composed of a voltage dividing circuit composed of a plurality of resistors (here, two), and the voltage applied to the reactor (29) is correlated with the power supply voltage (Vin) of the AC power supply (91). Is detected as a voltage (Vac). That is, it can be said that the detection position of the voltage detection circuit (33) according to the second embodiment is not on the AC side but on the DC side.
- FIG. 13 illustrates the case where the power supply phase detection circuit (31) and the power supply frequency detection circuit (32) are not provided, they may be provided.
- Embodiment 3 shows an example in which the circuit configurations of the power conversion device (1) and the current estimation device (10) are different from those of the first embodiment.
- the third embodiment shown in FIG. 14 and the first embodiment shown in FIG. 1 differ in the position of the reactor (29) and the circuit configuration of the voltage detection circuit (33).
- the reactor (29) is connected on the power supply wiring (4) between the converter circuit (21) and the capacitor (26) of the DC link section (25). That is, it can be said that the reactor (29) according to the third embodiment is located not on the AC side but on the DC side.
- the voltage detection circuit (33) is connected to the wiring (2) and the wiring (3) between the AC power supply (91) and the converter circuit (21). That is, it can be said that the detection position of the voltage detection circuit (33) according to the third embodiment is on the AC side as in FIG.
- Such a voltage detection circuit (33) is constituted by a voltage dividing circuit including a plurality of resistors (here, two). Specifically, in the voltage detection circuit (33), the positive side voltage (V1) and the negative side voltage (V2) of the AC power supply (91) are respectively applied to two resistors connected in series via a diode. It has a circuit configuration.
- FIG. 14 illustrates the case where the power supply phase detection circuit (31) and the power supply frequency detection circuit (32) are not provided, they may be provided.
- the offset correction coefficient (offset) adjustment processing (offset correction processing) described in the first embodiment is performed. Only becomes unnecessary. The reason why the adjustment process of the offset correction coefficient (offset) is unnecessary is that the position of the reactor (29) is on the DC side.
- the correction of the voltage drop (2Vdb) of the diode (D1, D4) in the converter circuit (21), the correction of the voltage drop (VR) at the reactor (29), and the gain correction coefficient ( The adjustment processing (gain correction processing) of G1, G2) is performed in the same manner as in the first embodiment.
- the reason why the voltage drop (2Vdb) of the diodes (D1, D4) is corrected is that the detection position of the voltage detection circuit (33) is on the AC side.
- Embodiment 4 shows an example in which the circuit configurations of the power conversion device (1) and the current estimation device (10) are different from those of the first embodiment.
- the fourth embodiment shown in FIG. 15 is different from the first embodiment shown in FIG. 1 only in the circuit configuration of the voltage detection circuit (33).
- the voltage detection circuit (33) is connected to the wiring (2) and the wiring (3) between the AC power supply (91) and the converter circuit (21). That is, it can be said that the detection position of the voltage detection circuit (33) according to the fourth embodiment is on the AC side as in FIG.
- Such a voltage detection circuit (33) is constituted by a voltage dividing circuit including a plurality of resistors (here, two). Specifically, in the voltage detection circuit (33), the positive side voltage (V1) and the negative side voltage (V2) of the AC power supply (91) are respectively applied to two resistors connected in series via a diode. It has a circuit configuration. Further, the connection node of the two resistors is connected to the controller (40) via the wiring (6). Another resistor is connected between the wiring (6) and the power source.
- correction of the voltage drop (2Vdb) of the diodes (D1, D4) in the converter circuit (21). Correction of voltage drop (VR) at reactor (29), adjustment processing of gain correction coefficient (G1, G2) (gain correction processing), and adjustment processing of offset correction coefficient (offset) (offset correction processing) All are performed in the same manner as in the first embodiment.
- the reason why the voltage drop (2Vdb) of the diodes (D1, D4) is corrected is that the detection position of the voltage detection circuit (33) is on the AC side, and the offset correction coefficient (offset) is adjusted. This is because the position of the reactor (29) is on the AC side.
- Embodiment 5 shows an example in which the circuit configurations of the power conversion device (1) and the current estimation device (10) are different from those of the first embodiment.
- the fifth embodiment shown in FIG. 16 and the first embodiment shown in FIG. 1 differ only in the position of the reactor (29).
- the reactor (29) is connected on the power supply wiring (4) between the converter circuit (21) and the capacitor (26) of the DC link section (25). That is, it can be said that the reactor (29) according to the fifth embodiment is located not on the AC side but on the DC side.
- FIG. 16 illustrates the case where the power supply phase detection circuit (31) and the power supply frequency detection circuit (32) are not provided, but they may be provided.
- step S32 is not essential. That is, the process of Step S33 may be executed regardless of the magnitude of the amplitude (inn_amp1, inn_amp2) of the double frequency component of the power supply frequency and the predetermined value.
- the amplitude (inn_amp1, inn_amp2) may be calculated using a frequency component that is a predetermined multiple of the power supply frequency, and may not be limited to twice the power supply frequency.
- the offset correction coefficient (offset) adjustment process is performed after the gain correction coefficient (G1, G2) adjustment process, but the order is not limited to this.
- the gain correction coefficient (G1, G2) adjustment process and the offset correction coefficient offset adjustment process may be performed simultaneously.
- the adjustment process of the gain correction coefficient (G1, G2) is essential, but the detailed process may not be limited to the details described in the first embodiment. As long as the purpose of appropriately adjusting the gain correction coefficients (G1, G2) is satisfied, the specific contents may be slightly different from the contents described in detail in the first embodiment.
- offset correction coefficient (offset) adjustment process the voltage drop (VR) correction of the reactor (29), and the voltage drop (2Vdb) correction at the diodes (D1 to D4) is not implemented. Good.
- the controller (40) has been described as performing the processing shown in FIGS. 3, 4 and 7 and also performing the inverter control, but only the processing shown in FIGS. 3, 4 and 7 is performed. There may be. In this case, a controller that performs inverter control is provided separately from the controller (40).
- the controller (40) can calculate the power supply phase ( ⁇ in) of the AC power supply (91) and the frequency (fin) of the power supply voltage (Vin) by the zero cross signal.
- the capacitor (26) does not have to have a relatively small capacity so as to absorb voltage fluctuation due to switching of the inverter circuit (27) without absorbing voltage fluctuation from the converter circuit (21).
- the estimated power supply current (Iin1) may be used not only for control of the inverter circuit (27) but also for wide control of the power conversion device (1) such as control of the converter circuit (21).
- the present invention is useful for an apparatus that accurately calculates the power supply current Iin using a voltage detection circuit (33) having a simple configuration without using a current sensor or a current detection circuit.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Manufacturing & Machinery (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Rectifiers (AREA)
- Inverter Devices (AREA)
- Housings And Mounting Of Transformers (AREA)
- Measuring Instrument Details And Bridges, And Automatic Balancing Devices (AREA)
- Memory System Of A Hierarchy Structure (AREA)
- Measurement Of Current Or Voltage (AREA)
Abstract
電圧検出回路(33)は、複数の抵抗(34a~34c,35a~35c)からなる分圧回路で構成され、交流電源(91)の電源電圧(Vin)に相関する電圧(Vac1,Vac2)を検出する。演算部(40)は、電圧検出回路(33)の検出結果(Vac1,Vac2)を用いてリアクトル(29)の両端電圧(VL)を求め、該両端電圧(VL)に基づいて電源電流(Iin)を推定する。演算部(40)は、推定した電源電流(Iin)の所定時間あたりの平均値に相関する値がコンデンサ(26)の下流側の電流(Iinv)の所定時間あたりの平均値に相関する値と一致するように、検出結果(Vac1,Vac2)のゲインを補正し、その結果(Vac1,Vac2)を用いてリアクトルの両端電圧(VL)を求める。
Description
本発明は、整流回路とインバータ回路との間にて該整流回路に並列にコンデンサが接続され、且つ、交流電源とコンデンサとの間にリアクトルが接続された電力変換装置において、インバータ回路を制御するための電源電流を推定する装置、に関するものである。
交流電源の交流電力を直流電力に変換するコンバータ回路と、該コンバータ回路の出力を所定周波数の交流電力に変換するインバータ回路とを備えた電力変換装置が知られている。このような電力変換装置では、一般的に、上記コンバータ回路の出力側にコンデンサが設けられている。
このような電力変換装置としては、例えば特許文献1が知られている。特許文献1では、検出した電源電流に基づいて、電源高調波の制御を含むインバータ制御がなされる。電源電流の検出方法としては、CT(Current Transformer)と呼ばれる電流検出センサを用いる方法(特許文献1)の他、電流検出センサの代わりにシャント抵抗及びオペアンプ等によって構成される電流検出回路を用いる方法(特許文献2)が挙げられる。
しかしながら、電流検出センサを用いる場合、該センサの配置スペースを設ける必要があり、また、該センサ分コストが嵩む。
電流検出回路を用いる場合、該回路の構成部品の数は、直流電圧の検出に用いられ構成がシンプルな分圧回路に比べて多いため、コストが嵩む。更に、電流検出回路の構成部品の配置スペースをプリント基板上に設けなければならない。
これに対し、特許文献3に示すように、電源電流を検出せずに推定する方法が存在する。
上記特許文献3では、コンバータ回路とインバータ回路との間に位置するリアクトルの両端電圧が検出され、その検出結果に基づいて電源電流が推定される。リアクトルの両端電圧は、上記分圧回路からなる電圧検出回路によって検出される。そのため、上記特許文献3では、特許文献1に比して構成部品の数が少なくて済み、また特許文献1,2に比して構成部品の配置スペースもさほど設けずとも良い。
しかしながら、上記特許文献3では、電圧検出回路が検出したリアクトルの両端電圧をそのまま用いて電源電流の推定が行われるため、推定した電源電流が実際の電源電流とは合致しないおそれがある。何故ならば、電圧検出回路の構成部品(例えば抵抗)には、個体差や温度特性の影響でバラツキが生じ、このバラツキが起因して電圧検出回路の検出結果に誤差が生じるからである。リアクトルの両端電圧を正確に検出できないと、推定される電源電流も不確かなものとなり、当該電源電流を用いたインバータ制御には影響が生じてしまう。
本発明は、かかる点に鑑みてなされたものであり、その目的は、電圧検出回路を用いて、電源電流を精度良く且つ安価に推定することである。
本開示の第1の態様は、交流電源(91)から出力された交流電力を整流する整流回路(21)と該整流回路(21)から電力供給されるインバータ回路(27)との間にて該整流回路(21)に並列にコンデンサ(26)が接続されると共に、上記交流電源(91)と上記コンデンサ(26)との間にリアクトル(29)が接続されてなる電力変換装置(1)において、上記コンデンサ(26)の上流側の電流である電源電流(Iin)を推定する電流推定装置(10)であって、複数の抵抗(34a~34c,35a~35c)からなる分圧回路で構成され、上記交流電源(91)の電源電圧(Vin)に相関する電圧(Vac1,Vac2)を検出する電圧検出回路(33)と、上記電圧検出回路(33)の検出結果(Vac1,Vac2)に基づいて上記リアクトル(29)の両端電圧(VL)を求め、該両端電圧(VL)に基づいて上記電源電流(Iin)を推定する演算部(40)とを備え、上記演算部(40)は、推定した上記電源電流(Iin)の所定時間あたりの平均値に相関する値が、上記コンデンサ(26)の下流側の電流(Iinv)の所定時間あたりの平均値に相関する値と一致するように、上記電圧検出回路(33)の検出結果(Vac1,Vac2)のゲインを補正し、ゲイン補正後の上記電圧検出回路(33)の検出結果(Vac1,Vac2)に基づいて上記リアクトルの両端電圧(VL)を求めることを特徴とする電流推定装置である。
ここでは、電源電圧(Vin)に相関する電圧(Vac1,Vac2)が電圧検出回路(33)で検出されるが、その検出結果(Vac1,Vac2)は、そのまま電源電流の推定に利用されるのではなく、ゲイン補正がなされた後に電源電流(Iin)の推定に利用される。特に、ゲインは、推定した電源電流(Iin)の所定時間あたりの平均値に相関する値が、コンデンサ(26)の下流側の電流(Iinv)の所定時間あたりの平均値に相関する値と一致するように補正される。ここで、“平均値に相関する値”としては、電流(Iin,Iinv)の所定時間あたりの平均値そのものや、電流(Iin,Iinv)の所定時間あたりの積算値等が挙げられる。推定した電源電流(Iin)に係る値が、コンデンサ(26)の下流側の電流(Iinv)に係る値と一致するということは、演算により求めたコンデンサ(26)を流れる電流(Ic)の所定時間あたりの平均値に相関する値がゼロに収束することを意味する。
この電流推定装置(10)では、上記のようなゲイン補正が電圧検出回路(33)の検出結果(Vac1,Vac2)に対して行われ、ゲイン補正後の検出結果(Vac1,Vac2)に基づいて電源電流(Iin)が推定される。これにより、この電流推定装置(10)では、電流センサや電流検出回路を用いず、構成が比較的シンプルな電圧検出回路(33)を用いて、電源電流(Iin)を精度良く算出することができる。
第2の態様は、第1の態様において、上記コンデンサ(26)は、上記整流回路(21)からの電圧変動を吸収することなく、上記インバータ回路(27)のスイッチングによる電圧変動を吸収する。
上記コンデンサ(26)は、比較的小容量であることを意味する。小容量な上記コンデンサ(26)は、整流回路(21)からの電圧変動を吸収しないため、交流電源(91)の電源周波数に起因するようなリプル電圧を平滑化できず、電源高調波が発生しやすい。それ故、電源高調波がなるべく小さくなるようにインバータ回路(27)を制御する必要があり、この制御には、電源電流が用いられる。これに対し、電流推定装置(10)は、既に述べたように、電源電流(Iin)を精度良く推定することができる。推定された精度の良い電源電流(Iin)を用いることで、電源高調波を抑制するインバータ回路(27)の制御も、より精度が高いものとなる。
第3の態様は、第1または第2の態様において、上記演算部(40)は、更に、上記リアクトル(29)の電圧降下分(VR)に基づいて上記リアクトル(29)の両端電圧(VL)を求める。
これにより、リアクトル(29)の両端電圧(VL)は、より精度良く求められる。
第4の態様は、第1から第3の態様のうちいずれか1つにおいて、上記整流回路(21)は、複数のダイオード(D1~D4)がブリッジ結線されたダイオードブリッジ回路で構成され、上記演算部(40)は、更に、上記ダイオード(D1~D4)にて生じる電圧降下(Vdb)に基づいて上記リアクトル(29)の両端電圧(VL)を求める。
これにより、リアクトル(29)の両端電圧(VL)は、より精度良く求められる。
第5の態様は、第4の態様において、上記電圧検出回路(33)は、上記交流電源(91)と上記整流回路(21)との間において、上記交流電源(91)の電源電圧(Vin)に相関する電圧(Vac1,Vac2)を検出する。
第6の態様は、第1の態様から第5の態様のうちいずれか1つにおいて、上記電圧検出回路(33)は、上記交流電源(91)の正側出力に対応する第1電圧検出部(34)と、上記交流電源(91)の負側出力に対応する第2電圧検出部(35)と、を有し、上記演算部(40)は、推定した上記電源電流(Iin)の所定時間あたりの平均値に相関する値が、上記コンデンサ(26)の下流側の電流(Iinv)の所定時間あたりの平均値に相関する値と一致するように、上記第1電圧検出部(34)の第1検出結果(Vac1)及び上記第2電圧検出部(35)の第2検出結果(Vac2)それぞれのゲインを補正し、ゲイン補正後の上記第1検出結果(Vac1)とゲイン補正後の上記第2検出結果(Vac2)との差に基づいて、上記リアクトル(29)の両端電圧(VL)を求める。
これにより、キャリアノイズの影響がキャンセルされた、精度の高いリアクトル(29)の両端電圧(VL)が求められる。
第7の態様は、第1の態様から第6の態様のうちいずれか1つにおいて、上記演算部(40)は、上記リアクトル(29)の両端電圧(VL)における積分値の、上記所定時間あたりの平均値に相関する値を第1値として演算し、上記コンデンサ(26)の両端電圧(Vdc)における微分値と上記コンデンサ(26)の下流側の電流(Iinv)との合計値の、上記所定時間あたりの平均値に相関する値を第2値として演算し、上記第1値が上記第2値と一致することによって、推定した上記電源電流(Iin)の所定時間あたりの平均値に相関する値が上記コンデンサ(26)の下流側の電流(Iinv)の所定時間あたりの平均値に相関する値と一致するように、上記電圧検出回路(33)の検出結果(Vac1,Vac2)のゲインを補正する。
これにより、電圧検出回路(33)の検出結果(Vac1,Vac2)のゲイン補正は、精度良く行われる。
第8の態様は、第7の態様において、上記所定時間は、上記交流電源(91)の半周期に設定されている。
第9の態様は、第1の態様から第8の態様のうちいずれか1つにおいて、上記演算部(40)は、上記リアクトル(29)の両端電圧(VL)の積分値に基づく上記電源電流(Iin1)、を第3値として演算し、上記コンデンサ(26)の両端電圧(Vdc)の微分値に基づく上記電源電流(Iin2)、を第4値として演算し、上記第3値の位相が上記第4値の位相と一致するように、上記電圧検出回路(33)の検出結果(Vac1,Vac2)のオフセットを補正し、オフセット補正後の上記電圧検出回路(33)の検出結果(Vac1,Vac2)に基づいて上記リアクトルの両端電圧(VL)を求める。
これにより、電圧検出回路(33)の検出結果(Vac1,Vac2)のオフセット補正は、精度良く行われる。更に、ゲイン補正のみならずオフセット補正がなされた電圧検出回路(33)の検出結果(Vac1,Vac2)に基づいて、リアクトル(29)の両端電圧(VL)がより精度良く求められるため、当該両端電圧(VL)に基づいて推定される電源電流(Iin)は、より実際の値に近づくことができる。
第10の態様は、第9の態様において、上記演算部(40)は、上記第3値及び上記第4値それぞれについて、電源周波数の所定倍の周波数成分での振幅(inn_amp1,inn_amp2)を演算し、上記振幅(inn_amp1,inn_amp2)が所定値よりも大きい場合、上記電圧検出回路(33)の検出結果(Vac1,Vac2)のオフセットの補正を行い、上記振幅(inn_amp1,inn_amp2)が上記所定値よりも小さい場合、上記電圧検出回路(33)の検出結果(Vac1,Vac2)のオフセットの補正を行わない。
電源周波数の周波数成分での振幅(inn_amp1,inn_amp2)が比較的小さいと、第3値及び第4値の各位相が正確に演算できない場合がある。これに対し、ここでは、上記振幅(inn_amp1,inn_amp2)が所定値よりも大きい場合に、第3値及び第4値の各位相が正確に演算できると判断し、各位相を用いたオフセット補正を行う。これにより、オフセット補正の精度が低下することを抑制することができる。
第11の態様は、第1の態様から第8の態様のうちいずれか1つにおいて、上記演算部(40)は、上記交流電源(91)の一周期のうち、上記電圧検出回路(33)の検出結果(Vac1,Vac2)が支配的ではない区間における該検出結果(Vac1,Vac2)の平均値を求め、これを用いて上記電圧検出回路(33)の検出結果(Vac1,Vac2)のオフセットを補正し、オフセット補正後の上記電圧検出回路(33)の検出結果(Vac1,Vac2)に基づいて上記リアクトルの両端電圧(VL)を求める。
電圧検出回路(33)の検出結果(Vac1,Vac2)が支配的ではない区間における該検出結果(Vac1,Vac2)の平均値は、オフセットのズレ分に相当する。このように、ここでは、電圧検出回路(33)の検出結果(Vac1,Vac2)のオフセットのズレ分を簡単に求めることができる。更に、電流推定装置(10)は、オフセット補正後の電圧検出回路(33)の検出結果(Vac1,Vac2)を用いて、リアクトル(29)の両端電圧(VL)をより精度良く求めることができる。
第12の態様は、第1の態様から第8の態様のうちいずれか1つにおいて、上記演算部(40)は、上記電圧検出回路(33)の検出結果(Vac1,Vac2)に基づいて上記交流電源(91)の電源電圧(Vin)を演算し、上記交流電源(91)のゼロクロス付近での上記電源電圧(Vin)の電圧値を用いて上記電圧検出回路(33)の検出結果(Vac1,Vac2)のオフセットを補正し、オフセット補正後の上記電圧検出回路(33)の検出結果(Vac1,Vac2)に基づいて上記リアクトルの両端電圧(VL)を求める。
交流電源(91)のゼロクロス付近での電源電圧(Vin)の電圧値は、オフセットのズレ分に相当する。このように、ここでは、電圧検出回路(33)の検出結果(Vac1,Vac2)のオフセットのズレ分を簡単に求めることができる。更に、電流推定装置(10)は、オフセット補正後の電圧検出回路(33)の検出結果(Vac1,Vac2)を用いて、リアクトル(29)の両端電圧(VL)をより精度良く求めることができる。
第13の態様は、第9の態様から第12の態様のうちいずれか1つにおいて、上記演算部(40)は、上記電圧検出回路(33)の検出結果(Vac1,Vac2)のゲイン補正を行った後に、上記電圧検出回路(33)の検出結果(Vac1,Vac2)のオフセット補正を行う。
先にゲイン補正が行われた状態で更にオフセット補正を行うことにより、オフセット補正時、オフセット補正がし易くなる。
第14の態様は、第9の態様から第13の態様のうちいずれか1つにおいて、上記リアクトル(29)は、上記交流電源(91)と上記整流回路(21)との間に接続されている。
第15の態様は、第1の態様から第14の態様のうちいずれか1つに記載の電流推定装置(10)を備えた電力変換装置である。
第16の態様は、交流電源(91)から出力された交流電力を整流する整流回路(21)と該整流回路(21)から電力供給されるインバータ回路(27)との間にて該整流回路(21)に並列にコンデンサ(26)が接続されると共に、上記交流電源(91)と上記コンデンサ(26)との間にリアクトル(29)が接続されてなる電力変換装置(1)において、上記コンデンサ(26)の上流側の電流である電源電流(Iin)を推定する電流推定方法であって、複数の抵抗(34a~34c,35a~35c)からなる分圧回路により、上記交流電源(91)の電源電圧(Vin)に相関する電圧(Vac1,Vac2)を検出する検出ステップと、上記交流電源(91)の電源電圧(Vin)に相関する電圧(Vac1,Vac2)に基づいて上記リアクトル(29)の両端電圧(VL)を求め、該両端電圧(VL)に基づいて上記電源電流(Iin)を推定する第1推定ステップと、推定した上記電源電流(Iin)の所定時間あたりの平均値に相関する値が、上記コンデンサ(26)の下流側の電流(Iinv)の所定時間あたりの平均値に相関する値と一致するように、検出された上記交流電源(91)の電源電圧(Vin)に相関する電圧(Vac1,Vac2)のゲインを補正する補正ステップと、ゲイン補正後の上記交流電源(91)の電源電圧(Vin)に相関する電圧(Vac1,Vac2)に基づいて上記リアクトル(29)の両端電圧(VL)を求め、求めた上記リアクトル(29)の両端電圧(VL)に基づいて上記電源電流(Iin)を推定する第2推定ステップと、を備える電流推定方法である。
ここでは、電源電圧(Vin)に相関する電圧(Vac1,Vac2)が分圧回路により検出されるが、その検出結果(Vac1,Vac2)は、そのまま電源電流の推定に利用されるのではなく、ゲイン補正がなされた後に電源電流(Iin)の推定に利用される。特に、ゲインは、推定した電源電流(Iin)の所定時間あたりの平均値に相関する値が、コンデンサ(26)の下流側の電流(Iinv)の所定時間あたりの平均値に相関する値と一致するように補正される。ここで、“平均値に相関する値”としては、電流(Iin,Iinv)の所定時間あたりの平均値そのものや、電流(Iin,Iinv)の所定時間あたりの積算値等が挙げられる。推定した電源電流(Iin)に係る値が、コンデンサ(26)の下流側の電流(Iinv)に係る値と一致するということは、演算により求めたコンデンサ(26)を流れる電流(Ic)の所定時間あたりの平均値に相関する値がゼロに収束することを意味する。
この電流推定方法では、上記のようなゲイン補正が分圧回路の検出結果(Vac1,Vac2)に対して行われ、ゲイン補正後の検出結果(Vac1,Vac2)に基づいてリアクトル(29)の両端電圧(VL)が求められ、その両端電圧(VL)に基づいて電源電流(Iin)が推定される。これにより、この電流推定方法では、電流センサや電流検出回路を用いず、構成が比較的シンプルな分圧回路を電圧検出手段として用いて、電源電流(Iin)を精度良く算出することができる。
本開示の態様によれば、電流センサや電流検出回路を用いず、構成が比較的シンプルな電圧検出回路(33)を用いて、電源電流(Iin)を精度良く算出することができる。
以下、本発明の実施形態を図面に基づいて詳細に説明する。なお、以下の実施形態は、本質的に好ましい例示であって、本発明、その適用物、あるいはその用途の範囲を制限することを意図するものではない。
≪実施形態1≫
<概要>
図1に示すように、電力変換装置(1)は、例えば単相の交流電源(91)に接続されると共に、モータ(95)に接続されている。電力変換装置(1)は、交流電源(91)から交流電力を供給されると、インバータ回路(27)において当該交流電力を所定周波数の電力に変換し、モータ(95)に出力する。つまり、電力変換装置(1)は、モータ(95)を駆動するための装置である。
<概要>
図1に示すように、電力変換装置(1)は、例えば単相の交流電源(91)に接続されると共に、モータ(95)に接続されている。電力変換装置(1)は、交流電源(91)から交流電力を供給されると、インバータ回路(27)において当該交流電力を所定周波数の電力に変換し、モータ(95)に出力する。つまり、電力変換装置(1)は、モータ(95)を駆動するための装置である。
なお、モータ(95)は、三相交流式のモータであって、例えば、空気調和装置の冷媒回路に接続される圧縮機を駆動するためのものである。
特に、電力変換装置(1)は、インバータ回路(27)を制御するための電源電圧(Iin)を、電流センサ及び電流検出回路を用いず正確に求めることができる電流推定装置(10)を備える。電流推定装置(10)は、比較的シンプルな構成の分圧回路からなる電圧検出回路(33)を備えており、該回路(33)の検出結果等からリアクトル(29)に印加される電圧(VL)を求め、これを用いて電源電流(Iin)をできる限り精度良く推定することができる。
<電力変換装置及び電流推定装置の構成>
本実施形態1の電力変換装置(1)は、コンバータ回路(21)(整流回路に相当)、直流リンク部(25)、インバータ回路(27)、リアクトル(29)、及び、電流推定装置(10)を備える。電流推定装置(10)は、各種検出回路(31,32,33,36)及び制御器(40)(演算部に相当)を備える。
本実施形態1の電力変換装置(1)は、コンバータ回路(21)(整流回路に相当)、直流リンク部(25)、インバータ回路(27)、リアクトル(29)、及び、電流推定装置(10)を備える。電流推定装置(10)は、各種検出回路(31,32,33,36)及び制御器(40)(演算部に相当)を備える。
-コンバータ回路-
コンバータ回路(21)は、配線(2,3)を介して交流電源(91)と接続されている。コンバータ回路(21)は、複数(図1では4つ)のダイオード(D1~D4)がブリッジ状に結線された、いわゆるダイオードブリッジ回路である。
コンバータ回路(21)は、配線(2,3)を介して交流電源(91)と接続されている。コンバータ回路(21)は、複数(図1では4つ)のダイオード(D1~D4)がブリッジ状に結線された、いわゆるダイオードブリッジ回路である。
具体的には、ダイオード(D1,D2)の各カソード端子は、電源配線(4)に接続され、ダイオード(D3,D4)の各アノード端子は、GND配線(5)に接続されている。ダイオード(D1)のアノード端子とダイオード(D3)のカソード端子との接続ノードは配線(2)に接続され、ダイオード(D2)のアノード端子とダイオード(D4)のカソード端子との接続ノードは、配線(3)に接続されている。
コンバータ回路(21)は、交流電源(91)から出力された交流を直流に整流する。
なお、配線(2)は、交流電源(91)の正側出力端子と、ダイオード(D1,D3)同士の接続ノードとを繋ぐ配線である。配線(3)は、交流電源(91)の負側出力端子と、ダイオード(D2,D4)同士の接続ノードとを繋ぐ配線である。
-直流リンク部-
直流リンク部(25)は、コンデンサ(26)を有する。コンデンサ(26)は、コンバータ回路(21)の出力側において、コンバータ回路(21)と並列に接続されている。つまり、コンデンサ(26)は、電源配線(4)とGND配線(5)との間に接続されている。
直流リンク部(25)は、コンデンサ(26)を有する。コンデンサ(26)は、コンバータ回路(21)の出力側において、コンバータ回路(21)と並列に接続されている。つまり、コンデンサ(26)は、電源配線(4)とGND配線(5)との間に接続されている。
上記コンデンサ(26)は、例えばフィルムコンデンサによって構成される。コンデンサ(26)の容量は、インバータ回路(27)におけるスイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)のスイッチング動作の周波数に対応して生じるリプル電圧(電圧変動)を平滑可能な静電容量であるが、コンバータ回路(21)によって整流された電圧(電源電圧に起因する電圧変動)を平滑化できない静電容量であることができる。即ち、コンデンサ(26)は、コンバータ回路(21)からの電圧変動を吸収することなく、インバータ回路(27)のスイッチングによる電圧変動を吸収する。直流リンク部(25)は、コンバータ回路(21)の出力を受けて、コンデンサ(26)の両端から交流電源(91)の電源電圧(Vin)の約2倍の周波数の脈動を有する直流リンク電圧(Vdc)を出力する。即ち、直流リンク電圧(Vdc)は、コンデンサ(26)の両端電圧に相当する。直流リンク電圧(Vdc)は、最大値が最小値の約2倍以上となるような大きな脈動を有している。
-インバータ回路-
インバータ回路(27)は、コンバータ回路(21)の出力側において、直流リンク部(25)のコンデンサ(26)に並列接続されている。インバータ回路(27)は、コンバータ回路(21)から直流リンク部(25)を介して電力供給される。インバータ回路(27)は、複数のスイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)(図1では三相交流のため6つ)がブリッジ結線されることで構成されている。
インバータ回路(27)は、コンバータ回路(21)の出力側において、直流リンク部(25)のコンデンサ(26)に並列接続されている。インバータ回路(27)は、コンバータ回路(21)から直流リンク部(25)を介して電力供給される。インバータ回路(27)は、複数のスイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)(図1では三相交流のため6つ)がブリッジ結線されることで構成されている。
具体的には、インバータ回路(27)は、2つのスイッチング素子(SuとSx,SvとSy,SwとSz)を互いに直列に接続してなる3つのスイッチングレグを有する。各スイッチングレグにおいて、上アームのスイッチング素子(Su,Sv,Sw)と下アームのスイッチング素子(Sx,Sy,Sz)との接続ノードが、それぞれモータ(95)の各相のコイル(図示せず)に接続されている。
更に、インバータ回路(27)は、複数の還流ダイオード(Du,Dv,Dw,Dx,Dy,Dz)(図1では6つ)を有する。各還流ダイオード(Du,Dv,Dw,Dx,Dy,Dz)は、各スイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)に逆並列接続されている。
このような構成を有するインバータ回路(27)は、各スイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)のオンオフ動作により、直流リンク電圧(Vdc)をスイッチングして、直流リンク電圧(Vdc)を三相交流電圧に変換する。三相交流電圧は、モータ(95)に供給される。
-リアクトル-
リアクトル(29)は、交流電源(91)とコンバータ回路(21)との間の配線(2)上に設けられている。
リアクトル(29)は、交流電源(91)とコンバータ回路(21)との間の配線(2)上に設けられている。
本実施形態1では、リアクトル(29)の両端電圧(VL)が演算により求められ電源電流(Iin)の推定に利用されるが、これについては後述する。
-各種検出回路-
各種検出回路(31,32,33,36)としては、交流電源(91)の電源位相(θin)を検出する電源位相検出回路(31)、交流電源(91)の電源電圧(Vin)の周波数(fin)を検出する電源周波数検出回路(32)、電源電圧(Vin)に相関する電圧(Vac1,Vac2)を検出する電圧検出回路(33)、直流リンク部(25)の直流リンク電圧(Vdc)を検出する直流電圧検出回路(36)が挙げられる。
各種検出回路(31,32,33,36)としては、交流電源(91)の電源位相(θin)を検出する電源位相検出回路(31)、交流電源(91)の電源電圧(Vin)の周波数(fin)を検出する電源周波数検出回路(32)、電源電圧(Vin)に相関する電圧(Vac1,Vac2)を検出する電圧検出回路(33)、直流リンク部(25)の直流リンク電圧(Vdc)を検出する直流電圧検出回路(36)が挙げられる。
なお、図示してはいないが、電力変換装置(1)は、コンデンサ(26)の下流側(即ち、インバータ回路(27)側)を流れる電流(Iinv)を検出する検出部も有している。
-電圧検出回路-
特に、上記電圧検出回路(33)は、図1に示すように、複数の抵抗(34a~34c,35a~35c)(図1では6つ)によって構成される。具体的に、電圧検出回路(33)は、電源電圧(Vin)のうち、交流電源(91)の正側出力の電圧(V1)(以下、正側電圧)に対応する第1電圧検出部(34)と、交流電源(91)の負側出力の電圧(V2)(以下、負側電圧)に対応する第2電圧検出部(35)とを有する。第1電圧検出部(34)は、抵抗(34a~34c)によって構成され、第2電圧検出部(35)は、抵抗(35a~35c)によって構成されている。
特に、上記電圧検出回路(33)は、図1に示すように、複数の抵抗(34a~34c,35a~35c)(図1では6つ)によって構成される。具体的に、電圧検出回路(33)は、電源電圧(Vin)のうち、交流電源(91)の正側出力の電圧(V1)(以下、正側電圧)に対応する第1電圧検出部(34)と、交流電源(91)の負側出力の電圧(V2)(以下、負側電圧)に対応する第2電圧検出部(35)とを有する。第1電圧検出部(34)は、抵抗(34a~34c)によって構成され、第2電圧検出部(35)は、抵抗(35a~35c)によって構成されている。
第1電圧検出部(34)においては、抵抗(34a)の一端は、配線(2)上のうち、交流電源(91)とリアクトル(29)との間に接続されている。抵抗(34b)の一端は、GNDに接続されている。抵抗(34a)及び抵抗(34b)の他端同士は、配線(6)を介して制御器(40)と接続されている。抵抗(34c)は、一端が電圧値(Vcc)を有する電源に接続され、他端が配線(6)に接続されている。
第2電圧検出部(35)においては、抵抗(35a)の一端は、配線(3)上に接続されている。抵抗(35b)の一端は、GNDに接続されている。抵抗(35a)及び抵抗(35b)の他端同士は、配線(7)を介して制御器(40)と接続されている。抵抗(35c)は、一端が電圧値(Vcc)を有する電源に接続され、他端が配線(7)に接続されている。
即ち、第1電圧検出部(34)及び第2電圧検出部(35)は、互いに別の分圧回路で構成されている。
このような構成により、第1電圧検出部(34)は、交流電源(91)の正側電圧(V1)が抵抗(34a~34c)によって分圧された電圧を第1検出結果(Vac1)として検出する。第2電圧検出部(35)は、交流電源(91)の負側電圧(V2)が抵抗(35a~35c)によって分圧された電圧を第2検出結果(Vac2)として検出する。具体的に、各抵抗(34a~34c,35a~35c)の抵抗値を順に“R1,R2,R3,R4,R5,R6”と定義すると、第1及び第2検出結果Vac1,Vac2それぞれは、次式にて示される。


但し、“RL1”“RL2”は、次式で示される。


上式(1)(2)で得られる第1及び第2検出結果(Vac1,Vac2)は、制御器(40)に入力される。制御器(40)では、基本的には、第1検出結果(Vac1)と第2検出結果(Vac2)との差が演算され、その演算結果を用いて電源電圧(Vin)が把握される。
特に、本実施形態1に係る電圧検出回路(33)は、上述したように、交流電源(91)とコンバータ回路(21)との間の位置にて、正側電圧(V1)及び負側電圧(V2)それぞれに対応する電圧(Vac1,Vac2)、つまりは交流電源(91)の電源電圧(Vin)に相関する電圧(Vac1,Vac2)を検出する構成となっている。それ故、コンバータ回路(21)の各ダイオード(D1~D4)が導通されていない状態においても、電圧検出回路(33)は、電圧(Vac1,Vac2)を検出することができる。
図2に、第1及び第2検出結果(Vac1,Vac2)の波形と、各第1及び第2検出結果(Vac1,Vac2)に対応する正側電圧(V1)及び負側電圧(V2)の波形とを、並べて示す。図2から明らかなように、電源位相(θin)が0度~180度の範囲では、第1検出結果(Vac1)及び正側電圧(V1)は、第2検出結果(Vac2)及び負側電圧(V2)よりも支配的と言える。逆に、電源位相(θin)が180度~360度の範囲では、第2検出結果(Vac2)及び負側電圧(V2)は、第1検出結果(Vac1)及び正側電圧(V1)よりも支配的と言える。以下では、説明の便宜上、電源位相(θin)が0度~180度の区間を「電源前半部」、電源位相(θin)が180度~360度の区間を「電源後半部」と呼称する。
但し、電源前半部及び電源後半部の定義は、上述に限られるものではなく、例えば、電源前半部が180度~360度、電源後半部が0度~180度となってもよい。
なお、第1検出結果(Vac1)は、正側電圧(V1)を分圧した値であることから、電源後半部において、正側電圧(V1)が概ね0V付近であっても第1検出結果(Vac1)は0Vではない。同様に、第2検出結果(Vac2)は、負側電圧(V2)を分圧した値であることから、電源前半部において、負側電圧(V2)が概ね0V付近であっても第2検出結果(Vac2)は0Vではない。
-制御器-
制御器(40)は、例えばCPU及びメモリ等で構成されるマイクロコンピュータで構成されている。制御器(40)は、各種検出回路(31,32,33,36)と接続される他、図示はしていないが、インバータ回路(27)におけるスイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)のゲート端子と接続されている。制御器(40)は、各種検出回路(31,32,33,36)の検出結果等に基づいて、モータ(95)が所望の回転速度で回転できるように、スイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)のオンオフを制御する。
制御器(40)は、例えばCPU及びメモリ等で構成されるマイクロコンピュータで構成されている。制御器(40)は、各種検出回路(31,32,33,36)と接続される他、図示はしていないが、インバータ回路(27)におけるスイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)のゲート端子と接続されている。制御器(40)は、各種検出回路(31,32,33,36)の検出結果等に基づいて、モータ(95)が所望の回転速度で回転できるように、スイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)のオンオフを制御する。
特に、本実施形態1の制御器(40)は、上記電圧検出回路(33)から入力された第1及び第2検出結果(Vac1,Vac2)等を用いて、リアクトル(29)の両端電圧(VL)を正確に求める。そして、制御器(40)は、求めたリアクトル(29)の両端電圧(VL)に基づいて、電源高調波の制御を含むインバータ制御に用いるための電源電流(Iin)を、リアクトル(29)の両端電圧(VL)を用いて精度良く推定する処理を行う。
ここで、本実施形態1において、電源電流(Iin)の推定処理を何故行うのかについて説明する。上述したように、コンデンサ(26)が、インバータ回路(27)におけるスイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)のスイッチング周波数に対応して生じるリプル電圧しか平滑かできないような小容量のコンデンサの場合、交流電源(91)の電源周波数に起因するリプル電圧を平滑化できないため、電源高調波が発生し易い。それ故、制御器(40)は、インバータ回路(27)内のスイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)の駆動を制御して電源高調波がなるべく小さくなるようにしている。このような制御を行うためには、電源電流(Iin)が必要となり、一般的には、CT(Current Transformer)やシャント抵抗を利用した電流検出回路を利用して電源電流(Iin)が検出される。しかしながら、これらの方法では、CT自体が比較的高価であったり、電流検出回路の部品点数が多く構成が複雑化したりする等の問題がある。
これに対し、本実施形態1では、電源電圧(Vin)に相関する電圧である第1及び第2検出結果(Vac1,Vac2)が電圧検出回路(33)によって検出されると、当該第1及び第2検出結果(Vac1,Vac2)に基づいてリアクトル(29)の両端電圧(VL)が正確に演算により求められ、求められたリアクトル(29)の両端電圧(VL)に基づいて電源電流(Iin)が推定される。つまり、本実施形態1では、電源電流(Iin)を検出するためのCT及び電流検出回路が不要である。それ故、本実施形態1に係る電流推定装置(10)は、CTや電流検出回路により電源電流(Iin)を直接検出する方法よりも構成が簡単であり、コストの増大も抑えられる。
<電源電流を正確に検出する方法>
では次に、リアクトル(29)の両端電圧(VL)の演算処理及び電源電流(Iin)の推定処理について、詳述する。
では次に、リアクトル(29)の両端電圧(VL)の演算処理及び電源電流(Iin)の推定処理について、詳述する。
図3は、制御器(40)が行う全体的な処理の流れを、簡潔に表したフロー図である。大まかな流れとしては、図3に示すように、制御器(40)は、上記電圧検出回路(33)の第1及び第2検出結果(Vac1,Vac2)を用いて電源電圧(Vin)の算出処理を行う(ステップS1)。その後、制御器(40)は、リアクトル(29)の両端電圧(VL)の算出処理を行う(ステップS2)。さらにその後、制御器(40)は、電源電流(Iin)の算出処理を行う(ステップS3)。このようにして得られた電源電流(Iin)が所定基準を満たせば(ステップS4のYes)、図3の一連の処理は終了し、当該電源電流(Iin)は、インバータ制御に利用される。しかし、得られた電源電流(Iin)が所定基準を満たさない場合は(ステップS4のNo)、制御器(40)は、ステップS1以降の動作を繰り返す。ステップS1以降の動作を繰り返す際、制御器(40)は、上記電圧検出回路(33)の第1及び第2検出結果(Vac1,Vac2)に対してゲイン補正処理及びオフセット補正処理を行う(ステップS5)。
-電源電圧(Vin)の算出処理(ステップS1)-
上式(1)の右辺の第1項のうち“RL1/(RL1+R1)”の部分は、第1検出結果(Vac1)のゲインを表し、上式(2)の右辺の第1項のうち“RL2/(RL2+R2)”の部分は、第2検出結果(Vac2)のゲインを表す。上式(1)の右辺の第2項のうち“(R1/(RL1+R1))×(R2/(R2+R5))”の部分は、第1検出結果(Vac1)のオフセットを表し、上式(2)の右辺の第2項のうち“(R3/(RL2+R3))×(R4/(R4+R6))”の部分は、第2検出結果(Vac2)のオフセットを表す。これらゲイン及びオフセットには、第1及び第2検出結果(Vac1,Vac2)の構成部品(例えば抵抗)の個体差及び構成部品が有する温度特性の影響でバラツキが生じ、バラツキが起因して電圧検出回路(33)には検出誤差が生じてしまう。
上式(1)の右辺の第1項のうち“RL1/(RL1+R1)”の部分は、第1検出結果(Vac1)のゲインを表し、上式(2)の右辺の第1項のうち“RL2/(RL2+R2)”の部分は、第2検出結果(Vac2)のゲインを表す。上式(1)の右辺の第2項のうち“(R1/(RL1+R1))×(R2/(R2+R5))”の部分は、第1検出結果(Vac1)のオフセットを表し、上式(2)の右辺の第2項のうち“(R3/(RL2+R3))×(R4/(R4+R6))”の部分は、第2検出結果(Vac2)のオフセットを表す。これらゲイン及びオフセットには、第1及び第2検出結果(Vac1,Vac2)の構成部品(例えば抵抗)の個体差及び構成部品が有する温度特性の影響でバラツキが生じ、バラツキが起因して電圧検出回路(33)には検出誤差が生じてしまう。
-ゲイン補正処理及びオフセット補正処理(ステップS5)-
そこで、制御器(40)は、電圧検出回路(33)の第1及び第2検出結果(Vac1,Vac2)のゲイン及びオフセットを次式(3)で補正する。
そこで、制御器(40)は、電圧検出回路(33)の第1及び第2検出結果(Vac1,Vac2)のゲイン及びオフセットを次式(3)で補正する。
“G1”は、第1検出結果(Vac1)のゲインを補正するためのゲイン補正係数、“G2”は、第2検出結果(Vac2)のゲインを補正するためのゲイン補正係数、“offset”はオフセット補正係数(即ちオフセットのずれ分)を表す。上式(3)のように、制御器(40)は、電圧検出回路(33)の検出結果である電圧(Vac1,Vac2)それぞれにゲイン補正係数(G1,G2)を乗算し、次いで乗算結果同士を減算する。これにより、制御器(40)は、キャリアノイズの影響がキャンセルされ且つゲイン補正がなされた電源電圧(Vin)を得ることができる。更に、制御器(40)は、上記乗算結果同士が減算されて得られた値に、オフセット補正係数(offset)を加算することにより、更にオフセット補正がなされた電源電圧(Vin)を得ることができる。
本実施形態1では、上式(3)において電源電圧(Vin)を精度良く得るために、上記式(3)で利用されるゲイン補正係数(G1,G2)、オフセット補正係数(offset)を徐々に調整していく処理を行うことで、ゲイン補正処理及びオフセット補正処理が行われていく。図3から明らかなように、ゲイン補正処理及びオフセット補正処理(ステップS5)は、電源電流(Iin)が所定基準を満たすまで、繰り返し行われるが、ゲイン補正係数(G1,G2)及びオフセット補正係数(offset)をどのように調整するかについては、“<ゲイン補正係数の調節処理>”“<オフセット補正係数の調節処理>”にて詳述する。
-リアクトル(29)の両端電圧(VL)の算出処理(ステップS2)-
制御器(40)は、ステップS1の後、上記式(3)によって求めた電源電圧(Vin)を用いて、リアクトル(29)の両端電圧(VL)を求める。電圧変換装置(1)の回路構成上、電源電圧(Vin)の絶対値は、リアクトル(29)の両端電圧(VL)と直流リンク電圧(Vdc)との合計に等しい(|Vin|=VL+Vdc)。そのため、リアクトル(29)の両端電圧(VL)は、上記方法によって求めた電源電圧(Vin)の絶対値から、直流電圧検出回路(36)により検出された直流リンク電圧(Vdc)を減算することにより求めることができる(VL=|Vin|-Vdc)。
制御器(40)は、ステップS1の後、上記式(3)によって求めた電源電圧(Vin)を用いて、リアクトル(29)の両端電圧(VL)を求める。電圧変換装置(1)の回路構成上、電源電圧(Vin)の絶対値は、リアクトル(29)の両端電圧(VL)と直流リンク電圧(Vdc)との合計に等しい(|Vin|=VL+Vdc)。そのため、リアクトル(29)の両端電圧(VL)は、上記方法によって求めた電源電圧(Vin)の絶対値から、直流電圧検出回路(36)により検出された直流リンク電圧(Vdc)を減算することにより求めることができる(VL=|Vin|-Vdc)。
しかしながら、リアクトル(29)では、リアクトル(29)自身が有する抵抗成分により電圧降下が生じる。また、コンバータ回路(21)では、ブリッジ状のダイオード(D1~D4)のうち2つのダイオード(D1,D4)による電圧降下が生じる。それ故、単に電源電圧(Vin)の絶対値から直流リンク電圧(Vdc)を減算しても、リアクトル(29)の両端電圧(VL)を正確には得られ難い。
そこで、本実施形態1に係る制御器(40)は、リアクトル(29)の両端電圧(VL)を求める際、次式(4)に示すように、電源電圧(Vin)と直流リンク電圧(Vdc)に加え、更にリアクトル(29)の電圧降下分(VR)及びコンバータ回路(21)のダイオード(D1~D4)にて生じる電圧降下分(2Vdb)(具体的には、2つのダイオード(D1,D4)による電圧降下分)を用いる。
この上式(4)により、制御器(40)は、より実際の値に近いリアクトル(29)の両端電圧(VL)を得ることができる。
なお、上式(4)における2つの電圧降下分(VR,2Vdb)の各値は、厳密に考慮して決定されることが好ましい。これらの各値が実際と乖離する程、リアクトル(29)の両端電圧(VL)の演算誤差が大きく現れるためである。特に、後で述べるように、電源電流(Iin)は、次式(5)に係る積分演算によって算出されるため、これらの電圧降下分(VR,2Vdb)の各値が精度良く考慮されていないと、電源電流(Iin)の算出にも大きな影響がおよぼされることになる。従って、電圧降下分(VR,2Vdb)の各値は、演算及び実際の検出動作等により、適切な値を求めることが好ましい。例えば、リアクトル(29)の電圧降下分(VR)を検出回路(図示せず)によって検出する場合、検出ゲイン及びオフセットを含む検出回路の誤差を適正に補正することにより、演算誤差できる限り最小限にとどめると良い。
-電源電流(Iin)の算出処理(ステップS3)-
次いで、制御器(40)は、ステップS2において、上式(4)によって求めたリアクトル(29)の両端電圧(VL)を用いて、電源電流(Iin)を求める。
次いで、制御器(40)は、ステップS2において、上式(4)によって求めたリアクトル(29)の両端電圧(VL)を用いて、電源電流(Iin)を求める。
具体的には、次式(5)に示すように、制御器(40)は、リアクトル(29)の両端電圧(VL)を積分することにより、電源電流(Iin)を推定する。

また、電源電流(Iin)を演算により求めるのであれば、上式(5)とは別途、回路構成に着目した下式(6)の方法もある。図1に係る電圧変換装置(1)の回路構成上、コンデンサ(26)の上流側の電流である電源電流(Iin)は、コンデンサ(26)の下流側の電流であるインバータ回路(27)側に流れる電流(Iinv)と、コンデンサ(26)側に流れる電流(Ic)との合計に等しい(Iin=Iinv+Ic)。そこで、次式(6)では、図示しない検出部によって検出されたインバータ回路(27)側に流れる電流(Iinv)に、直流リンク電圧(Vdc)の微分演算により求めたコンデンサ(26)に流れる電流(Ic)を加算することにより、電源電流(Iin)が得られることを示している。

ここで、上式(5)及び上式(6)では、電源電流(Iin)をいずれの式で算出したかが分かるように、上式(5)で算出された電源電流を“Iin1”、上式(6)で算出された電源電流を“Iin2”と表している。
しかしながら、上式(6)は、コンデンサ電流(Ic)を微分演算により求めるため、高周波ノイズの影響を受けやすい。そのため、上式(6)で得られた電源電流(Iin2)を例えば単相コンデンサレスの高調波制御にて使用するとなると、問題がある。従って、本実施形態1では、単相コンデンサレスのインバータ制御用としての電源電流(Iin)を算出する場合には、上式(5)を用いて演算された電源電流(Iin1)を用いる。
-電源電流(Iin)が所定基準を満たすか否かの判断処理(ステップS4)-
上式(5)で電源電流(Iin1)を算出するには、上式(3)及び(4)を経由する必要がある。そのため、式(5)で得られた電源電流(Iin1)は、電圧検出回路(33)自体の検出誤差の影響を受けることになる。また、オフセット補正及びゲイン補正がなされれば、式(3)の算出結果が変化するため、これに連動して式(5)で得られた電源電流(Iin1)も変化することになる。
上式(5)で電源電流(Iin1)を算出するには、上式(3)及び(4)を経由する必要がある。そのため、式(5)で得られた電源電流(Iin1)は、電圧検出回路(33)自体の検出誤差の影響を受けることになる。また、オフセット補正及びゲイン補正がなされれば、式(3)の算出結果が変化するため、これに連動して式(5)で得られた電源電流(Iin1)も変化することになる。
これに対し、上式(6)で得られた電源電流(Iin2)は、上式(6)から明らかなように、電圧検出回路(33)自体の検出誤差を受けることはない。
それ故、制御器(40)は、上式(6)で得られた電源電流(Iin2)は、式(5)で得られた電源電流(Iin1)が精度の良い値となっているか否かを判定するための所定基準として用いる。即ち、本実施形態1の制御器(40)は、ゲイン補正及びオフセット補正の際、これらの補正が適切に行われているかどうかを、上式(6)で得られた電源電流(Iin2)を基準とした時に上式(5)で得られた電源電流(Iin1)がどのような値を取るかで判断する。具体的には、後述でも行うが、制御器(40)は、上式(5)で求めた電源電流(Iin1)が上式(6)で求めた電源電流(Iin2)と一致している場合は、上式(6)の右辺の第2項に表されたコンデンサ(26)に流れる電流(Ic)の演算結果がゼロに収束することと同義であって、上式(5)で求めた電源電流(Iin1)が所定基準を満たしていると判定し、上式(5)で求めた電源電流(Iin1)をインバータ制御用として利用するパラメータとして決定する。しかし、制御器(40)は、上式(5)で求めた電源電流(Iin1)が上式(6)で求めた電源電流(Iin2)と乖離している場合は、電源電流(Iin1)が電源電流(Iin2)に一致するまでゲイン補正及びオフセット補正を繰り返す。
<ゲイン補正係数の調整処理>
ここでは、図3で述べたゲイン補正について詳述する。
ここでは、図3で述べたゲイン補正について詳述する。
上式(1)(2)の右辺の第1項におけるゲインの部分“RL1/(RL1+R1)”“RL2/(RL2+R3)”を補正するためのゲイン補正係数(G1,G2)が、電圧検出回路(33)の構成部品のバラツキを確実に吸収できるように、本実施形態1の制御器(40)は、ゲイン補正係数(G1,G2)を徐々に調整する処理を行う。
図4は、上記ゲイン補正係数(G1,G2)の調整処理の流れを詳細に示す。図5は、電圧検出回路(33)の各検出結果(Vac1,Vac2)を上下に並べて示すと共に、直前の電源半周期で電源電圧(Vin)に対し支配的であった検出結果の種類、及び、調整対象となるゲイン補正係数を、電源ゼロクロス毎に表している。
前提として、ゲイン補正係数(G1,G2)の補正前か後かに拘わらず、全ての各種検出回路(31,32,33,36)は常に検出動作を行っているものとし、制御器(40)は上式(3)~上式(5)を用いて電源電流(Iin1)の演算を行っているものとする。更に、ゲイン補正係数(G1,G2)の補正前か後かに拘わらず、制御器(40)は、図示しない検出部により検出されたインバータ(27)側に流れる電流(Iinv)と、直流電圧検出回路(36)が検出した直流リンク電圧(Vdc)を上式(6)に用いて、電源電流(Iin2)の演算も行っているものとする。これらの演算結果は、図示しないメモリに逐次蓄積される。
図4に示すように、制御器(40)は、電源位相(θin)に基づき電源ゼロクロスのタイミングを把握する(ステップS10)。電源ゼロクロスのタイミングに至ると(ステップS10のYes)、制御器(40)は、上式(5)の演算結果、即ちリアクトル(29)の両端電圧(VL)における積分値の、所定時間あたりの平均値(即ち、電源電流(Iin1)の所定時間あたりの平均値)に相関する値を、第1値として演算する。更に、制御器(40)は、上式(6)の演算結果、即ち直流リンク電圧(Vdc)の微分値と検出されたインバータ(27)側に流れる電流(Iinv)との合計値の、所定時間あたりの平均値(即ち、電源電流(Iin2)の所定時間あたりの平均値)に相関する値を、第2値として演算する。例えば、制御器(40)は、上式(5)の演算結果(Iin1)を所定時間分積算し(iin_sum1)、これを積算回数cut_sumで除算することにより、単純平均値である第1値を算出する(iin_sum1/cut_sum)。同様に、制御器(40)は、上式(6)の演算結果(Iin2)を所定時間分積算し(iin_sum2)、これを積算回数cut_sumで除算することにより、単純平均値である第2値を算出する(iin_sum2/cut_sum)。
所定時間は、仮に図5における電源ゼロクロスのタイミング“A”でのゲイン補正係数の調整処理では、その直前の電源半周期区間“B”に設定される。即ち、制御器(40)は、直前の電源半周期区間である区間Bにおける上式(5)の演算結果(Iin1)の単純平均値を第1値とし、同区間Bにおける上式(6)の演算結果(Iin2)の単純平均値を第2値として求める。
次いで、図4に示すように、制御器(40)は、第1値と第2値との差を算出する(iin_err=(iin_sum1/cut_sum)-(iin_sum2/cut_sum))(ステップS11)。特に、本実施形態1では、微分演算の値である第2値を基準とし、第1値が第2値からどの程度プラス側またはマイナス側に乖離しているかを算出する。
なお、本実施形態1では、第1値及び第2値が単純平均値である場合を例示しているが、第1値及び第2値は、平均値に相関する値であれば良く、必ずしも平均値である必要はない。例えば、第1値は、上式(5)の演算結果(Iin1)を所定時間分積算した値そのもの(iin_sum1)であってもよく、第2値は、上式(6)の演算結果(Iin2)を所定時間分積算した値そのもの(iin_sum2)であってもよい。
次いで、制御器(40)は、現在の電源ゼロクロスの直前の電源半周期にて電源電圧(Vin)に対し支配的であった検出結果が、第1及び第2検出結果(Vac1,Vac2)のうちどちらであったのかを判定する(ステップS12)。判定結果から、制御器(40)は、現時点において調整対象とするべきゲイン補正係数(G1,G2)を決定する。
例えば、図5における電源ゼロクロス“A”でのゲイン補正係数の調整処理では、その直前の電源半周期区間“B”の間に支配的であった検出結果は“Vac2”となっている。そこで、制御器(40)は、当該検出結果“Vac2”に対応するゲイン補正係数“G2”を、調整対象として決定する。
図4のステップS12において、判定結果が検出結果“Vac1”である場合(ステップS12のYes)、制御器(40)は、ステップS11で求めた第1値と第2値との差(iin_err)がプラスの値かマイナスの値か、即ち、第2値を基準として第1値がプラス側なのかマイナス側なのかを判定する(ステップS13)。
ステップS13において、当該差(iin_err)がプラスの値である場合(ステップS13のYes)、制御器(40)は、ゲイン補正係数(G1)を小さくする(ステップS14)。逆に、当該差(iin_err)がマイナスの値である場合(ステップS13のNo)、制御器(40)は、ゲイン補正係数(G1)を大きくする(ステップS15)。
また、ステップS12において、判定結果が検出結果“Vac2”である場合(ステップS12のNo)、制御器(40)は、ステップS13と同様、ステップS11で求めた第1値と第2値との差(iin_err)がプラスの値かマイナスの値かを判定する(ステップS16)。
ステップS16において、当該差(iin_err)がプラスの値である場合(ステップS16のYes)、制御器(40)は、ゲイン補正係数(G2)を小さくする(ステップS17)。逆に、当該差(iin_err)がマイナスの値である場合(ステップS16のNo)、制御器(40)は、ゲイン補正係数(G2)を大きくする(ステップS18)。
ステップS14,S15,S17,S18の後、制御器(40)は、ステップS11で求めた第1値及び第2値をクリアする(ステップS19)。
ステップS19の後、制御器(40)は、ステップS14,S15,S17,S18にて調整した後のゲイン補正係数(G1,G2)を上式(3)に当てはめることで、上式(3)を更新する。そして、制御器(40)は、更新された上式(3)に加え、上式(4)及び上式(5)を用いて、図3のステップS1~S3で順に説明したように、電源電圧(Vin)、リアクトル(29)の両端電圧(VL)、積分方法による電源電流(Iin1)を逐次演算し続ける(S20)。
次いで、制御器(40)は、ステップS19のタイミングから電源周期が1周経過した電源ゼロクロスのタイミングにて、当該タイミング直前の電源半周期の期間における第1値及び第2値を再度求め、その差(iin_err)を演算する。制御器(40)は、当該差(iin_err)が概ねゼロであるか否か(即ち、第1値が第2値と一致したか否か)を判定する。
当該差(iin_err)が概ねゼロでない場合(即ち、第1値が第2値と一致しない場合)(ステップS21のNo)、制御器(40)は、再度ステップS10以降の動作を繰り返す。ステップS21にて、当該差(iin_err)が概ねゼロである場合(即ち、第1値が第2値と概ね一致する場合)(ステップS21のYes)、制御器(40)は、ゲイン補正係数(G1,G2)が電圧検出回路(33)のバラツキを吸収できる程度に調整が行われたものと判断し、ゲイン補正係数(G1,G2)の一連の調整動作を終了する。即ち、ステップS10からステップS21は、ゲイン補正係数(G1,G2)が電圧検出回路(33)のバラツキを吸収できる程度に調整されるまで、繰り返し行われる。ステップS21が満たされるということは、第1値が第2値と一致することによって、ゲイン補正係数(G1,G2)の合わせ込みの基準である式(6)に係るコンデンサ(26)に流れる電流(Ic)(微分演算部分)の、所定時間(ここでは電源半周期)あたりの平均値に相関する値が、ゼロに収束したことを意味する。同時にこれは、推定した電源電流(Iin)の所定時間あたりの平均値に相関する値が、インバータ(27)側に流れる電流(Iinv)の所定時間あたりの平均値に相関する値と一致することを意味する。
なお、ゲイン補正(詳細には、ゲイン補正係数の調節)処理を表すステップS11~ステップS21のうち、ステップS13~S15は、電源前半部に寄与するゲイン補正係数(G1)の調整過程を表し、ステップS16~S18は、電源後半部に寄与するゲイン補正係数(G2)の調整過程を表す。
図6は、上述したゲイン補正係数(G1,G2)の調整処理の過程を例示したものである。先ず、図6の(a)は、ゲイン補正係数(G1,G2)の調整処理が実行される前の、基準である式(6)の演算結果(Iin2)と、式(5)の演算結果(Iin1)とを表す。図6の(a)は、第1電圧検出部(34)のゲインが設計値からプラス側にずれており、第2電圧検出部(35)のゲインが設計値からマイナス側にずれている状態を例示している。すると、第1検出結果(Vac1)が支配的である電源前半部では、電源電流(Iin1)の電流値が、基準である電源電流(Iin2)に対し全体的に高くなっている。一方、第2検出結果(Vac2)が支配的である電源後半部では、電源電流(Iin1)の電流値が、基準となる電源電流(Iin2)に対し全体的に低くなっている。
ここで、ゲインが設計値からプラス側にずれるとは、構成部品のバラツキの影響により、第1電圧検出部(34)が、実際に検出するべき電圧値よりも大きい電圧値を検出した場合を言う。ゲインが設計値からマイナス側にずれるとは、構成部品のバラツキの影響により、第2電圧検出部(35)が、実際に検出するべき電圧値よりも小さい電圧値を検出した場合を言う。
図6の(b)は、図6の(a)の状態から、電源前半部に対して図4のステップS14が行われた場合を表す。この場合、ステップS14により、第1電圧検出部(34)のバラツキを吸収できる程度に、電源前半部に寄与するゲイン補正係数(G1)が調整されたため、再計算された式(5)による電源電流(Iin1)は、基準となる式(6)の電源電流(Iin2)と概ね一致している。しかし、図6の(b)では、ステップS15~S17は未だ行われていないため、電源後半部では依然として電源電流(Iin1)と電源電流(Iin2)が乖離している。
図6の(c)は、図6の(b)の状態から、電源後半部に対して図4のステップS18が行われた場合を表す。この場合、ステップS18により、第2電圧検出部(35)のバラツキを吸収できる程度に、電源後半部に寄与するゲイン補正係数(G2)が調整されたため、再計算された式(5)による電源電流(Iin1)は、基準となる式(6)の電源電流(Iin2)と、電源前半部から電源後半部にかけて概ね一致している。
従って、図6の(c)では、第1及び第2電圧検出部(34,35)を含む電圧検出回路(33)のゲインの個体差が電源電流(Iin1)の推定に影響をおよぼす可能性は、低減されていると言える。
<オフセット補正係数の調整処理>
ここでは、図3で述べたオフセット補正について詳述する。
ここでは、図3で述べたオフセット補正について詳述する。
上式(1)(2)の右辺の第2項におけるオフセットの部分“(R1/(RL1+R1))×(R2/(R2+R5))”“(R3/(RL2+R3))×(R4/(R4+R6))”を補正するためのオフセット補正係数(offset)が、電圧検出回路(33)の構成部品のバラツキを確実に吸収できるように、本実施形態1の制御器(40)は、オフセット補正係数(offset)の調整処理を更に行う。
図7は、上記オフセット補正係数(offset)の調整処理の流れを詳細に示す。本実施形態1に係るオフセット補正処理(即ち、オフセット補正係数(offset)の調整処理)は、上述した図4のゲイン補正処理(即ち、ゲイン補正係数(G1,G2)の調整処理)の後に行われる。
前提として、全ての各種検出回路(31,32,33,36)は、常に検出動作を行っているものとし、制御器(40)は、上式(3)~上式(5)を用いて電源電流(Iin1)の演算を行っているものとする。更に、制御器(40)は、直流電圧検出回路(36)が検出した直流リンク電圧(Vdc)を上式(6)に用いて電源電流(Iin2)の演算も行っているものとする。これらの演算結果は、図示しないメモリに逐次蓄積される。
図7に示すように、制御器(40)は、上式(5)を用いて電源電流(Iin1)、即ちリアクトル(29)の両端電圧(VL)の積分値に基づく電源電流(Iin1)(第3値に相当)を演算し、且つ、上式(6)を用いて電源電流(Iin2)、即ちコンデンサ(26)の両端電圧(Vdc)の微分値に基づく電源電流(Iin2)(第4値に相当)を演算する。制御器(40)は、これらの各電源電流(Iin1,Iin2)をフーリエ変換する。当該フーリエ変換の結果に基づいて、制御器(40)は、各電源電流(Iin1,Iin2)それぞれについて、電源周波数の2倍周波数成分と、該2倍周波数成分での振幅(iin_amp1,iin_amp2)を求める(ステップS31)。
次いで、制御器(40)は、ステップS31で求めた振幅(iin_amp1, iin_amp2)それぞれを、所定値と比較する(ステップS32)。振幅(iin_amp1,iin_amp2)の少なくとも一方が所定値よりも大きい場合、制御器(40)の処理は、ステップS33以降の動作を行う。しかし、両方の振幅(iin_amp1,iin_amp2)が所定値よりも小さい場合(ステップS32のNo)、制御器(40)は、ステップS33以降の処理(即ちオフセット補正処理)を行わず、図4の最初のステップS10の処理に移行する。
ここで、上記所定値は、各電源電流(Iin1,Iin2)の位相、及びこれらの位相差が正確に演算できる場合の、最低限の振幅(iin_amp1,iin_amp2)の大きさに設定されていることが好ましい。即ち、ステップS32は、電源周波数の2倍周波数成分の振幅(iin_amp1,iin_amp2)が小さすぎると、次ステップS33における位相及び位相差が正確に演算できないために行われる処理である。
ステップS32において、振幅(iin_amp1,iin_amp2)の少なくとも一方が所定値よりも大きい場合(ステップS32のYes)、制御器(40)は、各種検出回路(31,32,33,36)及びステップS31のフーリエ変換の結果等を適宜用いて、各電源電流(Iin1,Iin2)の位相(inn_phase1,inn_phase2)、及びこれらの差である位相差(inn_phase_err)を算出する(inn_phase_err=iin_phase1-inn_phase2)(ステップS33)。特に、本実施形態1では、制御器(40)は、微分演算を含む上式(6)による電源電流(Iin2)を基準とし、上式(5)による電源電流(Iin1)がどの程度プラス側またはマイナス側に乖離しているかを、位相差(inn_phase_err)として算出する。
なお、上記ステップS31~S33は、ゲイン補正係数の調整処理と同様、電源ゼロクロスのタイミングにて行われる。例えば、図5の電源ゼロクロスのタイミング“A”におけるオフセット補正係数の調整処理では、制御器(40)は、その直前の電源半周期区間“B”における上式(5)の演算結果(即ち電源電流Iin1)と、当該区間Bにおける上式(6)の演算結果(即ち電源電流Iin2)とを求める。
次いで、制御器(40)は、現在の電源ゼロクロスの直前の電源半周期にて電源電圧(Vin)に対し支配的であった検出結果が、第1及び第2検出結果(Vac1,Vac2)のうちどちらであったのかを判定する(ステップS34)。例えば、図5の電源ゼロクロス“A”でのオフセット補正係数の調整処理では、その直前の電源半周期区間“B”の間に支配的であった検出結果は“Vac2”となっている。この場合、制御器(40)は、現在の電源ゼロクロス“A”の直前の電源半周期区間“B”は、電源後半部が支配的であったことが判明する。
図7のステップS34において、判定結果が第1検出結果“Vac1”である場合(ステップS34のYes)、制御器(40)は、ステップS33で求めた位相差(inn_phase_err)がマイナスの値かプラスの値か、即ち、電源電流(Iin2)(第4値)を基準として電源電流(Iin1)(第3値)がプラス側なのかマイナス側なのかを判定する(ステップS35)。
ステップS35において、当該位相差(inn_phase_err)がプラスの値である場合(ステップS35のYes)、制御器(40)は、オフセット補正係数(offset)を大きくする(ステップS36)。逆に、当該位相差(inn_phase_err)がマイナスの値である場合(ステップS35のNo)、制御器(40)は、オフセット補正係数(offset)を小さくする(ステップS37)。
また、ステップS34において、判定結果が第2検出結果“Vac2”である場合(ステップS34のNo)、制御器(40)は、ステップS35と同様、ステップS33で求めた位相差(inn_phase_err)がプラスの値であるかマイナスの値であるのかを判定する(ステップS38)。
ステップS38において、当該位相差(inn_phase_err)がプラスの値である場合(ステップS38のYes)、制御器(40)は、オフセット補正係数(offset)を小さくする(ステップS39)。逆に、当該位相差(inn_phase_err)がマイナスの値である場合(ステップS38のNo)、制御器(40)は、オフセット補正係数(offset)を大きくする(ステップS40)。
このように、電源前半部に焦点を当てたステップS35~S37と、電源後半部に焦点を当てたステップS38~S40とでは、位相差(inn_phase_err)がプラスの値であるのかマイナスの値であるのかの判定(即ち位相(inn_phase1, inn_phase2)の大小関係)に応じてオフセット補正係数(offset)の大小を変化させる制御内容が、真逆となっている。
ステップS36,S37,S39,S40において、オフセット補正係数(offset)の調整幅は、位相差(inn_phase_err)がゼロに収束するように、即ち第3値である電源電流(Iin1)の位相(inn_phase1)が第4値である電源電流(Iin2)の位相(inn_phase2)と概ね一致するように、位相差(inn_phase_err)に応じて決定されることが好ましい。
ステップS36,S37,S39,S40の後、制御器(40)の処理は、図4のステップS21に移行する。
なお、図7では図示していないが、ステップS36,S37,S39,S40の後、制御器(40)は、調整後のオフセット補正係数(offset)に基づいて電源電流(Iin1)の位相(inn_phase1)を再演算すると共に、当該電源電流(Iin1)の位相(inn_phase1)と基準となる電源電流(Iin2)の位相(inn_phase2)との差を比較し、これらの位相差(inn_phase_err)が概ねゼロに収束したことを確認してもよい。
次に、上述したオフセット補正係数(offset)の調整処理の過程を、図8~図10を用いて簡単に示す。
図8の(a)は、オフセット補正係数(offset)の調整処理が実行される前の、基準である式(6)による電源電流(Iin2)と、式(5)による電源電流(Iin1)とを表す。図8の(b)は、図8の(a)の各電源電流(Iin1,Iin2)それぞれを、電源周波数の2倍周波数成分にて表したものである。図8の(a)及び(b)の状態では、未だゲイン補正及びオフセット補正のいずれも行っていない。特に、図8の(a)は、電源前半部では、基準である電源電流(Iin2)に対し電源電流(Iin1)が全体的に低くなっており、電源後半部では、基準である電源電流(Iin2)に対し電源電流(Iin1)が全体的に高くなっている。図8の(b)からは、基準である電源電流(Iin2)に対し電源電流(Iin1)の位相(inn_phase1)が進んでおり、電源電流(Iin2)の位相(inn_phase2)を基準とすると、電源電流(Iin1,Iin2)同士の位相差(inn_phase_err)は、マイナスの値となっているように見える。
図9は、図8の状態から、先にゲイン補正係数(G1,G2)の調整処理のみが図4に従って行われた後の状態を表す。具体的に、図9の(a)は、ゲイン補正係数(G1,G2)の調整処理のみが実行された後の、基準である式(6)による電源電流(Iin2)と、式(5)による電源電流(Iin1)とを表す。図9の(b)は、図9の(a)の各電源電流(Iin1,Iin2)それぞれを、電源周波数の2倍周波数成分にて表したものである。電源前半部については、図4のステップS15により、第1電圧検出部(34)のバラツキを吸収できる程度にゲイン補正係数(G1)が調整され、電源後半部については、図4のステップS17により、第2電圧検出部(35)のバラツキを吸収できる程度にゲイン補正係数(G2)が調整された状態を、図9は表している。そのため、電源前半部から電源後半部にかけて、再計算された電源電流(Iin1)の大きさは、基準となる電源電流(Iin2)の大きさと概ね一致している。
しかし、図9では、未だオフセット補正係数(offset)の調整処理がなされていない。そのため、図9の(b)から明らかなように、電源電流(Iin1,Iin2)同士の位相(inn_phase1,inn_phase2)は、一致していない。
なお、ゲイン補正係数(G1,G2)の調整処理前の図8の(b)では、電源電流(Iin2)に対し電源電流(Iin1)の位相(inn_phase1)が進んでいるように見えたが、ゲイン補正係数(G1,G2)の調整処理後の図9の(b)では、電源電流(Iin2)に対し電源電流(Iin1)の位相(inn_phase1)が進んでいるのではなく遅れていることが分かる。図9の(b)では、電源電流(Iin2)の位相(inn_phase2)を基準とすると、電源電流(Iin1,Iin2)同士の位相差(inn_phase_err)は、マイナスではなくプラスの値となっている。これは、ゲイン補正がオフセット補正よりも先に行われることにより、電源電流(Iin1)の本来の位相(inn_phase1)の状態が明確になったことを表す。このように、ゲイン補正がオフセット補正よりも先に行われることより、オフセット補正係数(offset)を調整し易くなるメリットがある。
図10は、図9の状態から、更にオフセット補正係数(offset)の調整処理が図7に従って行われた後の状態を表す。具体的に、図10の(a)は、オフセット補正係数(offset)の調整処理が実行された後の、基準である式(6)による電源電流(Iin2)と、式(5)による電源電流(Iin1)とを表す。図10の(b)は、図10の(a)の各電源電流(Iin1,Iin2)それぞれを、電源周波数の2倍周波数成分にて表したものである。図9の(b)にて説明したように、電源電流(Iin1,Iin2)同士の位相差(inn_phase_err)がプラスの値であることから、図7のステップS36またはステップS39に従って、第1及び第2電圧検出部(34,35)のバラツキを吸収できる程度にオフセット補正係数(offset)が調整された。そのため、図10では、再計算された式(5)による電源電流(Iin1)と基準となる式(6)による電源電流(Iin2)の電流値の一致のみならず、各電源電流(Iin1,Iin2)の位相(inn_phase1,inn_phase2)同士も、電源前半部から電源後半部にかけて概ね一致している。
従って、図10では、第1及び第2電圧検出部(34,35)を含む電圧検出回路(33)のオフセットの個体差が電源電流(Iin1)の推定に影響をおよぼす可能性は、低減されていると言える。
<効果>
本実施形態1では、電源電圧(Vin)に相関する電圧(Vac1,Vac2)が電圧検出回路(33)で検出されるが、その第1及び第2検出結果(Vac1,Vac2)は、そのまま電源電流の推定に利用されるのではなく、ゲイン補正がなされた後にリアクトル(29)の両端電圧(VL)が演算を経て電源電流(Iin)の推定に利用される。特に、ゲインは、推定した電源電流(Iin)の所定時間あたりの平均値に相関する値が、インバータ(27)側に流れる電流(即ち、コンデンサ(26)の下流側の電流)(Iinv)の所定時間あたりの平均値に相関する値と一致するように補正される。これにより、本実施形態1では、電流センサや電流検出回路を用いず、構成が比較的シンプルな電圧検出回路(33)を用いて、電源電流(Iin)を精度良く算出することができる。
本実施形態1では、電源電圧(Vin)に相関する電圧(Vac1,Vac2)が電圧検出回路(33)で検出されるが、その第1及び第2検出結果(Vac1,Vac2)は、そのまま電源電流の推定に利用されるのではなく、ゲイン補正がなされた後にリアクトル(29)の両端電圧(VL)が演算を経て電源電流(Iin)の推定に利用される。特に、ゲインは、推定した電源電流(Iin)の所定時間あたりの平均値に相関する値が、インバータ(27)側に流れる電流(即ち、コンデンサ(26)の下流側の電流)(Iinv)の所定時間あたりの平均値に相関する値と一致するように補正される。これにより、本実施形態1では、電流センサや電流検出回路を用いず、構成が比較的シンプルな電圧検出回路(33)を用いて、電源電流(Iin)を精度良く算出することができる。
また、本実施形態1では、コンデンサ(26)は、コンバータ回路(21)からの電圧変動を吸収することなく、インバータ回路(27)のスイッチングによる電圧変動を吸収するような、比較的小容量のものとなっている。それ故、コンデンサ(26)は、交流電源(91)の電源周波数に起因するようなリプル電圧を平滑化できず、電源高調波が発生しやすい状況にあるため、電源高調波がなるべく小さくなるように、電源電流を用いてインバータ回路(27)を制御する必要がある。これに対し、本実施形態1では、上述のように、精度の良い電源電流(Iin)が推定される。従って、電源高調波を抑制するインバータ回路(27)の制御も、より精度が高いものとなる。
また、本実施形態1では、制御器(40)は、上式(4)にて示されるように、更に、リアクトル(29)の電圧降下分(VR)に基づいてリアクトル(29)の両端電圧(VL)を求める。これにより、リアクトル(29)の両端電圧(VL)は、より精度良く求められる。
また、本実施形態1では、制御器(40)は、上式(4)にて示されるように、更に、ダイオード(D1~D4)にて生じる電圧降下(Vdb)に基づいてリアクトル(29)の両端電圧(VL)を求める。これにより、リアクトル(29)の両端電圧(VL)は、より精度良く求められる。
また、本実施形態1では、制御器(40)は、推定した上記電源電流(Iin)の所定時間あたりの平均値に相関する値が、インバータ(27)側に流れる電流(Iinv)の所定時間あたりの平均値に相関する値と一致するように、第1電圧検出部(34)の第1検出結果(Vac1)及び第2電圧検出部(35)の第2検出結果(Vac2)それぞれのゲインを補正し、ゲイン補正後の第1検出結果(Vac1)とゲイン補正後の第2検出結果(Vac2)との差に基づいて、リアクトル(29)の両端電圧(VL)を求める。これにより、キャリアノイズの影響がキャンセルされた、精度の高いリアクトル(29)の両端電圧(VL)が求められる。
また、本実施形態1では、制御器(40)は、リアクトル(29)の両端電圧(VL)における積分値に関連した第1値と、コンデンサ(26)の両端電圧(Vdc)における微分値に関連した第2値とが一致することによって、推定した上記電源電流(Iin)の所定時間あたりの平均値に相関する値がインバータ(27)側に流れる電流(Iinv)の所定時間あたりの平均値に相関する値と一致するように、電圧検出回路(33)の第1及び第2検出結果(Vac1,Vac2)のゲインを補正する。これにより、第1及び第2検出結果(Vac1,Vac2)のゲイン補正は、精度良く行われる。
なお、上記所定時間は、交流電源(91)の半周期に設定されている。
また、本実施形態1では、制御器(40)は、リアクトル(29)の両端電圧(VL)の積分値に基づく電源電流(Iin1)の位相と、コンデンサ(26)の両端電圧(Vdc)の微分値に基づく電源電流(Iin2)の位相とが一致するように、電圧検出回路(33)の検出結果(Vac1,Vac2)のオフセットが補正される。これにより、第1及び第2検出結果(Vac1,Vac2)のオフセット補正は、精度良く行われる。更に、ゲイン補正のみならずオフセット補正がなされた第1及び第2検出結果(Vac1,Vac2)に基づいて、リアクトル(29)の両端電圧(VL)がより精度良く求められるため、当該両端電圧(VL)に基づいて推定される電源電流(Iin)は、より実際の値に近づくことができる。
また、本実施形態1では、制御器(40)は、各電源電流(Iin1,Iin2)それぞれについて、電源周波数の所定倍の周波数成分での振幅(inn_amp1,inn_amp2)を演算し、振幅(inn_amp1,inn_amp2)が所定値よりも大きい場合にのみ、各電源電流(Iin1,Iin2)の位相が正確に演算できると判断し、第1及び第2検出結果(Vac1,Vac2)のオフセットの補正を行う。これにより、オフセット補正の精度が低下することを抑制することができる。
また、本実施形態1では、制御器(40)は、第1及び第2検出結果(Vac1,Vac2)のゲイン補正を行った後に、第1及び第2検出結果(Vac1,Vac2)のオフセット補正を行う。これにより、オフセット補正時、オフセット補正がし易くなる。
<オフセット補正係数(offset)の調整処理に係る変形例>
オフセット補正係数(offset)の調整処理は、図7に係る方法以外であってもよい。
オフセット補正係数(offset)の調整処理は、図7に係る方法以外であってもよい。
なお、以下の変形例1,2では、オフセット補正係数(offset)の調整処理の方法が上記と異なるのみであり、電力変換装置(1)及び電流推定装置(10)の回路構成、及び、ゲイン補正処理(ゲイン補正係数G1,G2の調整処理)は、上記と同様である。
-変形例1-
本変形例1では、制御器(40)は、電圧検出回路(33)の各検出結果(Vac1,Vac2)から、本来の設計値からのオフセットのズレ分を求め、そのズレ分をオフセット補正係数(offset)とする。
本変形例1では、制御器(40)は、電圧検出回路(33)の各検出結果(Vac1,Vac2)から、本来の設計値からのオフセットのズレ分を求め、そのズレ分をオフセット補正係数(offset)とする。
図11は、電圧検出回路(33)の各検出結果(Vac1,Vac2)それぞれに対応する正側電圧(V1)及び負側電圧(V2)を示す。既に説明したように、正側電圧(V1)は、電源電圧(Vin)の電源前半部にて支配的であるが、電源後半部では支配的ではない。それ故、正側電圧(V1)は、電源後半部では設計上電圧値は概ね“0V”で一定となるはずである。また、負側電圧(V2)は、電源電圧(Vin)の電源後半部にて支配的であるが、電源前半部では支配的ではない。それ故、負側電圧(V2)は、電源前半部では設計上電圧値は“0V”で一定となるはずである。しかしながら、正側電圧(V1)の電源後半部及びに負側電圧(V2)の電源前半部にて実際の電圧値が“0V”で一定とならないのは、電圧検出回路(33)の構成部品のバラツキ(個体差及び温度特性)が起因して、実際のオフセットの値が本来のオフセットの設計値がずれてしまうからである。
そこで、本変形例1に係る制御器(40)は、電圧検出回路(33)の第1検出結果(Vac1)に対しては、電源後半部の間(具体的には、電源位相(θin)が180度~360度の区間)の平均値を算出することで、当該電圧検出回路(33)における第1電圧検出部(34)のオフセットを検出する。制御器(40)は、第2検出結果(Vac2)に対しては、電源前半部の間(具体的には、電源位相(θin)が0度~180度の区間)の平均値を算出することで、当該電圧検出回路(33)における第2電圧検出部(35)のオフセットを検出する。そして、制御器(40)は、第1電圧検出部(34)のオフセットと第2電圧検出部(35)のオフセットとの差をオフセット補正係数(offset)として決定する。つまり、この手法では、電圧検出回路(33)の第1検出結果(Vac1)及び第2検出結果(Vac2)の両方を用いて、オフセット補正係数(offset)が求められている。
なお、制御器(40)は、電圧検出回路(33)の第1検出結果(Vac1)のみ、または、第2検出結果(Vac2)のみを用いて、オフセット補正係数(offset)を求めてもよい。また、制御器(40)は、第1検出結果(Vac1)の電源後半部と第2検出結果(Vac2)の電源前半部との平均値を求めてもよい。
また、制御器(40)は、第1電圧検出部(34)のオフセットと第2電圧検出部(35)のオフセットとの差をオフセット補正係数(offset)とするではなく、以下のような手法を用いても良い。制御器(40)は、第1電圧検出部(34)のオフセットを用いて第1検出結果(Vac1)を補正することにより、正確な第1検出結果(Vac1)を検出する。また、制御器(40)は、第2電圧検出部(35)のオフセットを用いて第2検出結果(Vac2)を補正することにより、正確な第2検出結果(Vac2)を検出する。この場合、制御器(40)は、正確な両検出結果(Vac1,Vac2)の差、即ち正確な検出結果(Vac1,Vac2)それぞれを式(3)の右辺の第1項及び第2項として利用することにより、正確な電源電圧(Vin)を算出することができる。
このように、各検出結果(Vac1,Vac2)が支配的ではない区間における該検出結果(Vac1,Vac2)の平均値は、オフセットのズレ分に相当するため、本変形例1では、オフセットのズレ分であるオフセット補正係数(offset)を、簡単に求めることができる。更に、電流推定装置(10)は、オフセット補正後の電圧検出回路(33)の検出結果(Vac1,Vac2)を用いて、リアクトル(29)の両端電圧(VL)をより精度良く求めることができる。
-変形例2-
本変形例2では、制御器(40)は、電圧検出回路(33)の各検出結果(Vac1,Vac2)に基づいて電源電圧(Vin)を演算し、その演算結果(演算による電源電圧(Vin))に基づいて本来の設計値からのオフセットのズレ分を求め、そのズレ分をオフセット補正係数(offset)とする。
本変形例2では、制御器(40)は、電圧検出回路(33)の各検出結果(Vac1,Vac2)に基づいて電源電圧(Vin)を演算し、その演算結果(演算による電源電圧(Vin))に基づいて本来の設計値からのオフセットのズレ分を求め、そのズレ分をオフセット補正係数(offset)とする。
具体的に、制御器(40)は、電圧検出回路(33)の各検出結果(Vac1,Vac2)を上式(3)に当てはめ、電源電圧(Vin)を演算する。本変形例2では、上記実施形態1と同様、オフセット補正係数(offset)の調整処理はゲイン補正係数(G1,G2)の調整処理後に行われる場合を例示しているため(図4,図7)、上式(3)では、ゲイン補正係数(G1,G2)のみが調整済みの状態であるとする。
また、制御器(40)は、電源位相検出回路(31)による交流電源(91)の電源位相(θin)に基づき、交流電源(91)の電源ゼロクロスのタイミングを把握している。
そこで、図12に示すように、制御器(40)は、交流電源(91)の電源ゼロクロス付近での、演算によりもとめた電源電圧(Vin)の電圧値を求め、求めた電圧値に基づいて、オフセット補正係数(offset)の調整を行う。具体的には、制御器(40)は、電源ゼロクロス付近での電源電圧(Vin)の電圧値がプラスである場合、オフセット補正係数(offset)を小さくし、電源ゼロクロス付近での電源電圧(Vin)の電圧値がプラスである場合、オフセット補正係数(offset)を大きくする調整を行う。
なお、制御器(40)は、求めたオフセット補正係数(offset)を用いて電圧検出回路(33)の第1検出結果(Vac1)及び第2検出結果(Vac2)のオフセット補正を行う。
このように、交流電源(91)のゼロクロス付近での電源電圧(Vin)の電圧値は、オフセットのズレ分に相当する。このように、本変形例2では、オフセット補正係数(offset)としてのオフセットのズレ分を、簡単に求めることができる。更に、電流推定装置(10)は、オフセット補正後の電圧検出回路(33)の検出結果(Vac1,Vac2)を用いて、リアクトル(29)の両端電圧(VL)をより精度良く求めることができる。
なお、オフセット補正係数(offset)により、再演算後の電源電圧(Vin)の電源ゼロクロス付近での電圧値がゼロに収束するまで、上記手順が繰り返されても良い。オフセット補正係数(offset)の調整の際、制御器(40)は、電源ゼロクロス付近における電源電圧(Vin)の電圧値の大きさをオフセットの設計値から減算し、減算結果をオフセット補正係数(offset)として設定してもよい。
≪実施形態2≫
本実施形態2では、上記実施形態1とは電力変換装置(1)及び電流推定装置(10)の回路構成が異なる例を示す。図13に示す本実施形態2と図1に示す上記実施形態1とでは、リアクトル(29)の位置、及び、電圧検出回路(33)の検出位置が異なっている。
本実施形態2では、上記実施形態1とは電力変換装置(1)及び電流推定装置(10)の回路構成が異なる例を示す。図13に示す本実施形態2と図1に示す上記実施形態1とでは、リアクトル(29)の位置、及び、電圧検出回路(33)の検出位置が異なっている。
なお、説明の便宜上、図13は、図1と対応する構成については同じ符合を付している。
リアクトル(29)は、コンバータ回路(21)と直流リンク部(25)のコンデンサ(26)との間において、電源配線(4)上に接続されている。即ち、本実施形態2に係るリアクトル(29)は、AC側ではなく、DC側に位置していると言える。
電圧検出回路(33)は、コンバータ回路(21)と直流リンク部(25)のコンデンサ(26)との間において、リアクトル(29)の入力側に設けられている。電圧検出回路(33)は、複数の抵抗(ここでは2つ)からなる分圧回路で構成され、リアクトル(29)に印加される電圧を、交流電源(91)の電源電圧(Vin)に相関する電圧(Vac)として検出する。即ち、本実施形態2に係る電圧検出回路(33)の検出位置は、AC側ではなく、DC側であると言える。
なお、図13は、電源位相検出回路(31)及び電源周波数検出回路(32)が設けられていない場合を例示しているが、設けられていても良い。
リアクトル(29)及び電圧検出回路(33)以外の回路構成は、上記実施形態1と同様であるため、説明を省略する。
また、電源電流(Iin)の推定に際し、基本的には式(3)~(6)が利用される。但し、電圧検出回路(33)の検出結果が1つであるため、上式(1)(2)のうち一方は不要となる。
更に、図17の“回路パターンNo.2”に該当するレコードで示されるように、図13の回路構成では、上記実施形態1で説明したコンバータ回路(21)におけるダイオード(D1,D4)の電圧降下分(2Vdb)の補正と、オフセット補正係数(offset)の調整処理(オフセット補正処理)は不要となる。ダイオード(D1,D4)の電圧降下分(2Vdb)の補正が不要であるのは、電圧検出回路(33)の検出位置がDC側だからであり、オフセット補正係数(offset)の調整処理が不要であるのは、リアクトル(29)の位置がDC側だからである。図13の回路構成では、リアクトル(29)での電圧降下分(VR)の補正、及び、ゲイン補正係数(G1,G2)の調整処理(ゲイン補正処理)は、上記実施形態1と同様に行われる。
≪実施形態3≫
本実施形態3では、上記実施形態1とは電力変換装置(1)及び電流推定装置(10)の回路構成が異なる例を示す。図14に示す本実施形態3と図1に示す上記実施形態1とでは、リアクトル(29)の位置、及び、電圧検出回路(33)の回路構成が異なっている。
本実施形態3では、上記実施形態1とは電力変換装置(1)及び電流推定装置(10)の回路構成が異なる例を示す。図14に示す本実施形態3と図1に示す上記実施形態1とでは、リアクトル(29)の位置、及び、電圧検出回路(33)の回路構成が異なっている。
なお、説明の便宜上、図14は、図1と対応する構成については同じ符合を付している。
リアクトル(29)は、コンバータ回路(21)と直流リンク部(25)のコンデンサ(26)との間において、電源配線(4)上に接続されている。即ち、本実施形態3に係るリアクトル(29)は、AC側ではなく、DC側に位置していると言える。
電圧検出回路(33)は、交流電源(91)とコンバータ回路(21)との間において、配線(2)及び配線(3)と接続されている。即ち、本実施形態3に係る電圧検出回路(33)の検出位置は、図1と同様、AC側であると言える。このような電圧検出回路(33)は、複数の抵抗(ここでは2つ)からなる分圧回路で構成される。具体的に、電圧検出回路(33)は、交流電源(91)の正側電圧(V1)及び負側電圧(V2)それぞれが、直列に接続された2つの抵抗にダイオードを介して印加される回路構成を有する。
なお、図14は、電源位相検出回路(31)及び電源周波数検出回路(32)が設けられていない場合を例示しているが、設けられていても良い。
リアクトル(29)及び電圧検出回路(33)以外の回路構成は、上記実施形態1と同様であるため、説明を省略する。
また、電源電流(Iin)の推定に際し、基本的には式(3)~(6)が利用される。但し、電圧検出回路(33)の検出結果が1つであるため、上式(1)(2)のうち一方は不要となる。
更に、図17の“回路パターンNo.3”に該当するレコードで示されるように、図14の回路構成では、上記実施形態1で説明したオフセット補正係数(offset)の調整処理(オフセット補正処理)のみが不要となる。オフセット補正係数(offset)の調整処理が不要であるのは、リアクトル(29)の位置がDC側だからである。図14の回路構成では、コンバータ回路(21)におけるダイオード(D1,D4)の電圧降下分(2Vdb)の補正、リアクトル(29)での電圧降下分(VR)の補正、及び、ゲイン補正係数(G1,G2)の調整処理(ゲイン補正処理)は、上記実施形態1と同様に行われる。ダイオード(D1,D4)の電圧降下分(2Vdb)の補正を行うのは、電圧検出回路(33)の検出位置がAC側だからである。
≪実施形態4≫
本実施形態4では、上記実施形態1とは電力変換装置(1)及び電流推定装置(10)の回路構成が異なる例を示す。図15に示す本実施形態4と図1に示す上記実施形態1とでは、電圧検出回路(33)の回路構成のみが異なっている。
本実施形態4では、上記実施形態1とは電力変換装置(1)及び電流推定装置(10)の回路構成が異なる例を示す。図15に示す本実施形態4と図1に示す上記実施形態1とでは、電圧検出回路(33)の回路構成のみが異なっている。
なお、説明の便宜上、図15は、図1と対応する構成については同じ符合を付している。
電圧検出回路(33)は、交流電源(91)とコンバータ回路(21)との間において、配線(2)及び配線(3)と接続されている。即ち、本実施形態4に係る電圧検出回路(33)の検出位置は、図1と同様、AC側であると言える。このような電圧検出回路(33)は、複数の抵抗(ここでは2つ)からなる分圧回路で構成される。具体的に、電圧検出回路(33)は、交流電源(91)の正側電圧(V1)及び負側電圧(V2)それぞれが、直列に接続された2つの抵抗にダイオードを介して印加される回路構成を有する。更に、2つの抵抗の接続ノードは、配線(6)を介して制御器(40)に接続されている。配線(6)と電源との間には、別の抵抗が接続されている。
電圧検出回路(33)以外の回路構成は、上記実施形態1と同様であるため、説明を省略する。
また、電源電流(Iin)の推定に際し、基本的には式(3)~(6)が利用される。但し、電圧検出回路(33)の検出結果が1つであるため、上式(1)(2)のうち一方は不要となる。
更に、図17の“回路パターンNo.4”に該当するレコードで示されるように、図14の回路構成では、コンバータ回路(21)におけるダイオード(D1,D4)の電圧降下分(2Vdb)の補正、リアクトル(29)での電圧降下分(VR)の補正、ゲイン補正係数(G1,G2)の調整処理(ゲイン補正処理)、及び、オフセット補正係数(offset)の調整処理(オフセット補正処理)の全てが、上記実施形態1と同様に行われる。ダイオード(D1,D4)の電圧降下分(2Vdb)の補正を行うのは、電圧検出回路(33)の検出位置がAC側だからであり、オフセット補正係数(offset)の調整処理を行うのは、リアクトル(29)の位置がAC側だからである。
≪実施形態5≫
本実施形態5では、上記実施形態1とは電力変換装置(1)及び電流推定装置(10)の回路構成が異なる例を示す。図16に示す本実施形態5と図1に示す上記実施形態1とでは、リアクトル(29)の位置のみが異なっている。
本実施形態5では、上記実施形態1とは電力変換装置(1)及び電流推定装置(10)の回路構成が異なる例を示す。図16に示す本実施形態5と図1に示す上記実施形態1とでは、リアクトル(29)の位置のみが異なっている。
なお、説明の便宜上、図16は、図1と対応する構成については同じ符合を付している。
リアクトル(29)は、コンバータ回路(21)と直流リンク部(25)のコンデンサ(26)との間において、電源配線(4)上に接続されている。即ち、本実施形態5に係るリアクトル(29)は、AC側ではなく、DC側に位置していると言える。
なお、図16は、電源位相検出回路(31)及び電源周波数検出回路(32)が設けられていない場合を例示しているが、設けられていても良い。
リアクトル(29)以外の回路構成は、上記実施形態1と同様であるため、説明を省略する。
また、電源電流Iinの推定に際し、基本的には式(3)~(6)が利用される。
更に、図17の“回路パターンNo.5”に該当するレコードで示されるように、図16の回路構成では、リアクトル(29)の位置がDC側であるため、上記実施形態1で説明したオフセット補正係数(offset)の調整処理(オフセット補正処理)のみが不要となる。図16の回路構成では、コンバータ回路(21)におけるダイオード(D1,D4)の電圧降下分(2Vdb)の補正、リアクトル(29)での電圧降下分(VR)の補正、及び、ゲイン補正係数(G1,G2)の調整処理(ゲイン補正処理)は、上記実施形態1と同様に行われる。ダイオード(D1,D4)の電圧降下分(2Vdb)の補正を行うのは、電圧検出回路(33)の検出位置が図1と同様、AC側だからである。
≪その他の実施形態≫
オフセット補正係数(offset)の調整処理の流れを表した図7では、ステップS32は必須ではない。つまり、電源周波数の2倍周波数成分の振幅(inn_amp1,inn_amp2)と所定値との大小に拘わらず、ステップS33移行の処理が実行されてもよい。
オフセット補正係数(offset)の調整処理の流れを表した図7では、ステップS32は必須ではない。つまり、電源周波数の2倍周波数成分の振幅(inn_amp1,inn_amp2)と所定値との大小に拘わらず、ステップS33移行の処理が実行されてもよい。
また、上記振幅(inn_amp1,inn_amp2)は、電源周波数の所定倍の周波数成分にて計算されればよく、電源周波数の2倍に限定されずともよい。
図4及び図7のフローでは、ゲイン補正係数(G1,G2)の調整処理を行った後に、オフセット補正係数(offset)の調整処理が行われているが、この順番に限定されずとも良い。ゲイン補正係数(G1,G2)の調整処理とオフセット補正係数offsetの調整処理とが、同時に行われても良い。
ゲイン補正係数(G1,G2)の調整処理は必須だが、その詳細処理は、実施形態1で詳述した内容そのもの限定されずとも良い。ゲイン補正係数(G1,G2)が適切に調整される目的を満たせば、その具体的な内容は、実施形態1で詳述した内容と若干異なっていても良い。
また、オフセット補正係数(offset)の調整処理、リアクトル(29)の電圧降下分(VR)の補正、ダイオード(D1~D4)での電圧降下分(2Vdb)の補正は、少なくとも1つが実施されずとも良い。
制御器(40)は、図3,図4,図7に示した処理を行うと共に、インバータ制御も行うものとして説明したが、図3,図4,図7に示した処理のみを行うものであってもよい。この場合、インバータ制御を行う制御器は、制御器(40)とは別途設けられる。
図1及び図15では、交流電源(91)の電源位相(θin)及び電源電圧(Vin)の周波数(fin)それぞれが、検出回路(31,32)によってハードウェア的に検出される場合を例示した。しかし、交流電源(91)の電源位相(θin)及び電源電圧(Vin)の周波数(fin)は、検出回路(31,32)により検出されるのではなく、上式(3)により算出された電源電圧(Vin)に基づいて、演算及び推定されてもよい。即ち、交流電源(91)の電源位相(θin)及び電源電圧(Vin)の周波数(fin)は、ソフトウェア的に求められても良い。例えば、算出された電源電圧(Vin)が閾値(例えば0V)以下の場合にはLowの値となり、算出された電源電圧(Vin)が上記閾値を超える場合Highの値となる信号を、制御器(40)がゼロクロス信号として生成する。当該ゼロクロス信号により、制御器(40)は、交流電源(91)の電源位相(θin)及び電源電圧(Vin)の周波数(fin)を演算することが可能となる。
コンデンサ(26)は、コンバータ回路(21)からの電圧変動を吸収することなく、インバータ回路(27)のスイッチングによる電圧変動を吸収するような比較的小容量のものでなくてもよい。
推定された電源電流(Iin1)は、インバータ回路(27)の制御のみならず、コンバータ回路(21)の制御等、電力変換装置(1)の幅広い制御に利用されてもよい。
以上説明したように、本発明は、電流センサや電流検出回路を用いず、構成がシンプルな電圧検出回路(33)を用いて、電源電流Iinを精度良く算出する装置について有用である。
1 電力変換装置
10 電流推定装置
29 リアクトル
21 コンバータ回路(整流回路)
26 コンデンサ
27 インバータ回路
33 電圧検出回路
34 第1電圧検出部
35 第2電圧検出部
40 制御器(演算部)
91 交流電源
10 電流推定装置
29 リアクトル
21 コンバータ回路(整流回路)
26 コンデンサ
27 インバータ回路
33 電圧検出回路
34 第1電圧検出部
35 第2電圧検出部
40 制御器(演算部)
91 交流電源
Claims (16)
- 交流電源(91)から出力された交流電力を整流する整流回路(21)と該整流回路(21)から電力供給されるインバータ回路(27)との間にて該整流回路(21)に並列にコンデンサ(26)が接続されると共に、上記交流電源(91)と上記コンデンサ(26)との間にリアクトル(29)が接続されてなる電力変換装置(1)において、上記コンデンサ(26)の上流側の電流である電源電流(Iin)を推定する電流推定装置(10)であって、
複数の抵抗(34a~34c,35a~35c)からなる分圧回路で構成され、上記交流電源(91)の電源電圧(Vin)に相関する電圧(Vac1,Vac2)を検出する電圧検出回路(33)と、
上記電圧検出回路(33)の検出結果(Vac1,Vac2)に基づいて上記リアクトル(29)の両端電圧(VL)を求め、該両端電圧(VL)に基づいて上記電源電流(Iin)を推定する演算部(40)と
を備え、
上記演算部(40)は、
推定した上記電源電流(Iin)の所定時間あたりの平均値に相関する値が、上記コンデンサ(26)の下流側の電流(Iinv)の上記所定時間あたりの平均値に相関する値と一致するように、上記電圧検出回路(33)の検出結果(Vac1,Vac2)のゲインを補正し、
ゲイン補正後の上記電圧検出回路(33)の検出結果(Vac1,Vac2)に基づいて上記リアクトルの両端電圧(VL)を求める
ことを特徴とする電流推定装置。 - 請求項1において、
上記コンデンサ(26)は、上記整流回路(21)からの電圧変動を吸収することなく、上記インバータ回路(27)のスイッチングによる電圧変動を吸収する
ことを特徴とする電流推定装置。 - 請求項1または請求項2において、
上記演算部(40)は、更に、上記リアクトル(29)の電圧降下分(VR)に基づいて上記リアクトル(29)の両端電圧(VL)を求める
ことを特徴とする電流推定装置。 - 請求項1から請求項3のうちいずれか1つにおいて、
上記整流回路(21)は、複数のダイオード(D1~D4)がブリッジ結線されたダイオードブリッジ回路で構成され、
上記演算部(40)は、更に、上記ダイオード(D1~D4)にて生じる電圧降下(Vdb)に基づいて上記リアクトル(29)の両端電圧(VL)を求める
ことを特徴とする電流推定装置。 - 請求項4において、
上記電圧検出回路(33)は、上記交流電源(91)と上記整流回路(21)との間において、上記交流電源(91)の電源電圧(Vin)に相関する電圧(Vac1,Vac2)を検出する
ことを特徴とする電流推定装置。 - 請求項1から請求項5のうちいずれか1つにおいて、
上記電圧検出回路(33)は、上記交流電源(91)の正側出力に対応する第1電圧検出部(34)と、上記交流電源(91)の負側出力に対応する第2電圧検出部(35)と、を有し、
上記演算部(40)は、
推定した上記電源電流(Iin)の上記所定時間あたりの平均値に相関する値が、上記コンデンサ(26)の下流側の電流(Iinv)の上記所定時間あたりの平均値に相関する値と一致するように、上記第1電圧検出部(34)の第1検出結果(Vac1)及び上記第2電圧検出部(35)の第2検出結果(Vac2)それぞれのゲインを補正し、
ゲイン補正後の上記第1検出結果(Vac1)とゲイン補正後の上記第2検出結果(Vac2)との差に基づいて、上記リアクトル(29)の両端電圧(VL)を求める
ことを特徴とする電流推定装置。 - 請求項1から請求項6のうちいずれか1つにおいて、
上記演算部(40)は、
上記リアクトル(29)の両端電圧(VL)における積分値の、上記所定時間あたりの平均値に相関する値を第1値として演算し、
上記コンデンサ(26)の両端電圧(Vdc)における微分値と上記コンデンサ(26)の下流側の電流(Iinv)との合計値の、上記所定時間あたりの平均値に相関する値を第2値として演算し、
上記第1値が上記第2値と一致することによって、推定した上記電源電流(Iin)の上記所定時間あたりの平均値に相関する値が上記コンデンサ(26)の下流側の電流(Iinv)の上記所定時間あたりの平均値に相関する値と一致するように、上記電圧検出回路(33)の検出結果(Vac1,Vac2)のゲインを補正する
ことを特徴とする電流推定装置。 - 請求項7において、
上記所定時間は、上記交流電源(91)の半周期に設定されている
ことを特徴とする電源推定装置。 - 請求項1から請求項8のうちいずれか1つにおいて、
上記演算部(40)は、
上記リアクトル(29)の両端電圧(VL)の積分値に基づく上記電源電流(Iin1)、を第3値として演算し、
上記コンデンサ(26)の両端電圧(Vdc)の微分値に基づく上記電源電流(Iin2)、を第4値として演算し、
上記第3値の位相が上記第4値の位相と一致するように、上記電圧検出回路(33)の検出結果(Vac1,Vac2)のオフセットを補正し、
オフセット補正後の上記電圧検出回路(33)の検出結果(Vac1,Vac2)に基づいて上記リアクトルの両端電圧(VL)を求める
ことを特徴とする電流推定装置。 - 請求項9において、
上記演算部(40)は、
上記第3値及び上記第4値それぞれについて、電源周波数の所定倍の周波数成分での振幅(inn_amp1,inn_amp2)を演算し、
上記振幅(inn_amp1,inn_amp2)が所定値よりも大きい場合、上記電圧検出回路(33)の検出結果(Vac1,Vac2)のオフセットの補正を行い、
上記振幅(inn_amp1,inn_amp2)が上記所定値よりも小さい場合、上記電圧検出回路(33)の検出結果(Vac1,Vac2)のオフセットの補正を行わない
ことを特徴とする電流推定装置。 - 請求項1から請求項8のうちいずれか1つにおいて、
上記演算部(40)は、
上記交流電源(91)の一周期のうち、上記電圧検出回路(33)の検出結果(Vac1,Vac2)が支配的ではない区間における該検出結果(Vac1,Vac2)の平均値を求め、これを用いて上記電圧検出回路(33)の検出結果(Vac1,Vac2)のオフセットを補正し、
オフセット補正後の上記電圧検出回路(33)の検出結果(Vac1,Vac2)に基づいて上記リアクトルの両端電圧(VL)を求める
ことを特徴とする電流推定装置。 - 請求項1から請求項8のうちいずれか1つにおいて、
上記演算部(40)は、
上記電圧検出回路(33)の検出結果(Vac1,Vac2)に基づいて上記交流電源(91)の電源電圧(Vin)を演算し、
上記交流電源(91)のゼロクロス付近での上記電源電圧(Vin)の電圧値を用いて上記電圧検出回路(33)の検出結果(Vac1,Vac2)のオフセットを補正し、
オフセット補正後の上記電圧検出回路(33)の検出結果(Vac1,Vac2)に基づいて上記リアクトルの両端電圧(VL)を求める
ことを特徴とする電流推定装置。 - 請求項9から請求項12のうちいずれか1つにおいて、
上記演算部(40)は、上記電圧検出回路(33)の検出結果(Vac1,Vac2)のゲイン補正を行った後に、上記電圧検出回路(33)の検出結果(Vac1,Vac2)のオフセット補正を行う
ことを特徴とする電流推定装置。 - 請求項9から請求項13のうちいずれか1つにおいて、
上記リアクトル(29)は、上記交流電源(91)と上記整流回路(21)との間に接続されている
ことを特徴とする電流推定装置。 - 請求項1から請求項14のいずれか1つに記載の電流推定装置(10)を備えた電力変換装置。
- 交流電源(91)から出力された交流電力を整流する整流回路(21)と該整流回路(21)から電力供給されるインバータ回路(27)との間にて該整流回路(21)に並列にコンデンサ(26)が接続されると共に、上記交流電源(91)と上記コンデンサ(26)との間にリアクトル(29)が接続されてなる電力変換装置(1)において、上記コンデンサ(26)の上流側の電流である電源電流(Iin)を推定する電流推定方法であって、
複数の抵抗(34a~34c,35a~35c)からなる分圧回路により、上記交流電源(91)の電源電圧(Vin)に相関する電圧(Vac1,Vac2)を検出する検出ステップと、
上記交流電源(91)の電源電圧(Vin)に相関する電圧(Vac1,Vac2)に基づいて上記リアクトル(29)の両端電圧(VL)を求め、該両端電圧(VL)に基づいて上記電源電流(Iin)を推定する第1推定ステップと、
推定した上記電源電流(Iin)の所定時間あたりの平均値に相関する値が、上記コンデンサ(26)の下流側の電流(Iinv)の上記所定時間あたりの平均値に相関する値と一致するように、検出された上記交流電源(91)の電源電圧(Vin)に相関する電圧(Vac1,Vac2)のゲインを補正する補正ステップと、
ゲイン補正後の上記交流電源(91)の電源電圧(Vin)に相関する電圧(Vac1,Vac2)に基づいて上記リアクトル(29)の両端電圧(VL)を求め、求めた上記リアクトル(29)の両端電圧(VL)に基づいて上記電源電流(Iin)を推定する第2推定ステップと、
を備える、電流推定方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/332,907 US10511233B2 (en) | 2016-09-30 | 2017-09-28 | Current estimating device |
| EP17856344.1A EP3499703B1 (en) | 2016-09-30 | 2017-09-28 | Current estimating device |
| ES17856344T ES2918524T3 (es) | 2016-09-30 | 2017-09-28 | Dispositivo de estimación de corriente |
| CN201780059836.0A CN109874378B (zh) | 2016-09-30 | 2017-09-28 | 电流推断装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016194824A JP6274287B1 (ja) | 2016-09-30 | 2016-09-30 | 電流推定装置 |
| JP2016-194824 | 2016-09-30 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018062395A1 true WO2018062395A1 (ja) | 2018-04-05 |
Family
ID=61158343
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/035239 WO2018062395A1 (ja) | 2016-09-30 | 2017-09-28 | 電流推定装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10511233B2 (ja) |
| EP (1) | EP3499703B1 (ja) |
| JP (1) | JP6274287B1 (ja) |
| CN (1) | CN109874378B (ja) |
| ES (1) | ES2918524T3 (ja) |
| WO (1) | WO2018062395A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6299831B1 (ja) * | 2016-09-30 | 2018-03-28 | ダイキン工業株式会社 | アクティブフィルタ装置、空気調和装置、及び空気調和システム |
| EP3316463A1 (de) * | 2016-10-27 | 2018-05-02 | Siemens Aktiengesellschaft | Ändern eines schaltzustands einer schalt-halbbrücke |
| US10809985B2 (en) | 2017-03-09 | 2020-10-20 | Microsoft Technology Licensing, Llc | Instrumenting program code |
| JP2023031835A (ja) | 2021-08-25 | 2023-03-09 | 日本電産株式会社 | モータ調整方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11113261A (ja) * | 1997-10-01 | 1999-04-23 | Mitsubishi Electric Corp | コンバータ装置 |
| JP2008043057A (ja) * | 2006-08-07 | 2008-02-21 | Yaskawa Electric Corp | Pwmコンバータ |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5731681A (en) * | 1995-06-28 | 1998-03-24 | Hitachi Koki Co., Ltd. | Motor control system for centrifugal machine |
| CN103647462B (zh) * | 2007-08-29 | 2017-04-26 | 三菱电机株式会社 | 交流直流变换装置、使用该交流直流变换装置的压缩机驱动装置和空调机 |
| JP2011205729A (ja) | 2010-03-24 | 2011-10-13 | Daikin Industries Ltd | 電力変換装置 |
| JP5979818B2 (ja) | 2011-01-18 | 2016-08-31 | ダイキン工業株式会社 | 電力変換装置 |
| JP5288009B2 (ja) * | 2011-01-18 | 2013-09-11 | ダイキン工業株式会社 | 電力変換装置 |
| KR101528691B1 (ko) | 2011-01-18 | 2015-06-12 | 다이킨 고교 가부시키가이샤 | 전력 변환 장치 |
| JP6075746B2 (ja) * | 2012-04-23 | 2017-02-08 | 東洋電機製造株式会社 | 電力変換装置 |
| JP5712987B2 (ja) * | 2012-09-27 | 2015-05-07 | ダイキン工業株式会社 | 電力変換装置の制御方法 |
| JP5817947B1 (ja) * | 2014-06-19 | 2015-11-18 | ダイキン工業株式会社 | 電力変換制御装置 |
-
2016
- 2016-09-30 JP JP2016194824A patent/JP6274287B1/ja active Active
-
2017
- 2017-09-28 US US16/332,907 patent/US10511233B2/en active Active
- 2017-09-28 CN CN201780059836.0A patent/CN109874378B/zh active Active
- 2017-09-28 WO PCT/JP2017/035239 patent/WO2018062395A1/ja unknown
- 2017-09-28 ES ES17856344T patent/ES2918524T3/es active Active
- 2017-09-28 EP EP17856344.1A patent/EP3499703B1/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11113261A (ja) * | 1997-10-01 | 1999-04-23 | Mitsubishi Electric Corp | コンバータ装置 |
| JP2008043057A (ja) * | 2006-08-07 | 2008-02-21 | Yaskawa Electric Corp | Pwmコンバータ |
Also Published As
| Publication number | Publication date |
|---|---|
| US10511233B2 (en) | 2019-12-17 |
| CN109874378B (zh) | 2020-08-28 |
| EP3499703B1 (en) | 2022-04-20 |
| US20190260304A1 (en) | 2019-08-22 |
| JP2018057248A (ja) | 2018-04-05 |
| CN109874378A (zh) | 2019-06-11 |
| EP3499703A1 (en) | 2019-06-19 |
| ES2918524T3 (es) | 2022-07-18 |
| EP3499703A4 (en) | 2020-03-25 |
| JP6274287B1 (ja) | 2018-02-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2018062395A1 (ja) | 電流推定装置 | |
| US9455630B2 (en) | Control circuit and control method of digital control power supply circuit, and digital control power supply circuit, electronic device and base station using the same | |
| JP5716408B2 (ja) | 電力変換装置 | |
| EP3160031B1 (en) | Power conversion control device | |
| US10084373B2 (en) | Power conversion device | |
| JP5109769B2 (ja) | スイッチング電源装置 | |
| US10734910B2 (en) | Air conditioner and rectifier | |
| JP2019068675A (ja) | 交流−直流変換装置 | |
| US10374513B2 (en) | AC-DC converter | |
| JP6584726B2 (ja) | 電流検出装置 | |
| JP2003244953A (ja) | Dc−dcコンバータ | |
| JP2018137841A (ja) | 力率改善回路及び充電装置 | |
| JP6226785B2 (ja) | 電源装置、電源装置の制御方法及び制御プログラム | |
| JP5507417B2 (ja) | 電源装置 | |
| JP2020005333A (ja) | スイッチング電源装置 | |
| JP4375539B2 (ja) | オフセット補償回路、電動機制御装置、およびオフセット補償方法 | |
| CN107465355B (zh) | 电源供应器及电压校正方法 | |
| JP2023027568A (ja) | 電流センサ | |
| JP5642625B2 (ja) | スイッチング電源装置 | |
| JP2008199814A (ja) | 力率補正形直流電源装置 | |
| JP2008187795A (ja) | 電力変換装置 | |
| US11070139B2 (en) | Systems and methods to estimate magnetic flux in a switched mode power supply | |
| WO2018220968A1 (ja) | 交流電動機の制御装置 | |
| US20230088626A1 (en) | Integrated circuit and power supply circuit | |
| EP3471258A1 (en) | Power converter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17856344 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2017856344 Country of ref document: EP Effective date: 20190314 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |