WO2018047874A1 - 加減速制御システム、加減速制御方法 - Google Patents
加減速制御システム、加減速制御方法 Download PDFInfo
- Publication number
- WO2018047874A1 WO2018047874A1 PCT/JP2017/032158 JP2017032158W WO2018047874A1 WO 2018047874 A1 WO2018047874 A1 WO 2018047874A1 JP 2017032158 W JP2017032158 W JP 2017032158W WO 2018047874 A1 WO2018047874 A1 WO 2018047874A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- acceleration
- host vehicle
- limit value
- drive command
- command value
- Prior art date
Links
- 230000001133 acceleration Effects 0.000 title claims abstract description 189
- 238000000034 method Methods 0.000 title claims description 28
- 238000004364 calculation method Methods 0.000 claims abstract description 70
- 230000036461 convulsion Effects 0.000 claims description 13
- 230000007423 decrease Effects 0.000 claims description 6
- 238000012937 correction Methods 0.000 description 25
- 230000008859 change Effects 0.000 description 23
- 230000008569 process Effects 0.000 description 19
- 239000000470 constituent Substances 0.000 description 9
- 230000006870 function Effects 0.000 description 8
- 238000004891 communication Methods 0.000 description 7
- 230000006399 behavior Effects 0.000 description 6
- 238000001514 detection method Methods 0.000 description 6
- 230000000694 effects Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 238000002485 combustion reaction Methods 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000001172 regenerating effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/038—Limiting the input power, torque or speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/143—Speed control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/1755—Brake regulation specially adapted to control the stability of the vehicle, e.g. taking into account yaw rate or transverse acceleration in a curve
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/11—Stepped gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
- B60W10/184—Conjoint control of vehicle sub-units of different type or different function including control of braking systems with wheel brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/188—Controlling power parameters of the driveline, e.g. determining the required power
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
- B60W40/072—Curvature of the road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/105—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/107—Longitudinal acceleration
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2230/00—Monitoring, detecting special vehicle behaviour; Counteracting thereof
- B60T2230/04—Jerk, soft-stop; Anti-jerk, reduction of pitch or nose-dive when braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/12—Lateral speed
- B60W2520/125—Lateral acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/16—Ratio selector position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/20—Road profile, i.e. the change in elevation or curvature of a plurality of continuous road segments
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/30—Road curve radius
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle of positioning data, e.g. GPS [Global Positioning System] data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0666—Engine torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
Definitions
- This disclosure relates to a technique for controlling acceleration / deceleration of the host vehicle.
- Patent Document 1 describes an acceleration / deceleration control system that calculates a target speed at each node using a turning radius at each node on the curve and a lateral acceleration setting value of the host vehicle.
- the target acceleration in the front-rear direction of the host vehicle is calculated based on the calculated target speed and the current speed of the host vehicle.
- the acceleration / deceleration control system is configured to obtain a drive command value to which a change amount limiter related to acceleration / deceleration in the front-rear direction of the host vehicle is added from the calculated target acceleration.
- the acceleration / deceleration control system in Patent Document 1 is configured such that excessive centrifugal force in the lateral direction is less likely to be applied to the occupant of the host vehicle by using the lateral acceleration set value. Further, the acceleration / deceleration control system is configured so that an excessive acceleration / deceleration force in the front-rear direction is less likely to be applied to the occupant of the host vehicle by using a change amount limiter related to acceleration / deceleration.
- the acceleration / deceleration control system is released, and then the acceleration / deceleration control system is restored by releasing the accelerator pedal.
- the deceleration of the host vehicle that occurs in this case is performed after the driver accelerates by his / her own intention, and therefore, it is possible to give the driver a feeling of deceleration stronger than the deceleration by the normal acceleration / deceleration control system. There was sex.
- An acceleration / deceleration control system that is one aspect of the present disclosure includes a command calculation unit and an output control unit.
- the command calculation unit calculates a target speed at each point on the road ahead of the host vehicle based on the road shape ahead of the host vehicle and the current position of the host vehicle, and based on the target speed and the current speed of the host vehicle, Adjusting the drive command value using an acceleration limit value that limits the acceleration of the host vehicle or an acceleration limit value that limits the jerk of the host vehicle when calculating the longitudinal drive command value to be generated in the host vehicle Configured to do.
- the restriction on acceleration / deceleration of the host vehicle is strengthened after driving operation and intervention by another control system, so that the behavior of the host vehicle becomes more stable. For this reason, when returning after the acceleration / deceleration control of the host vehicle is temporarily cancelled, it is possible to prevent the driver from feeling uncomfortable.
- a vehicle 100 is equipped with an advanced driving system 1 including an acceleration / deceleration control unit 10 that controls acceleration / deceleration of the host vehicle.
- the advanced operation system 1 corresponds to an acceleration / deceleration control system.
- the vehicle 100 is equipped with various control systems such as a powertrain system 2, a brake system 3, a steering system 4, an antilock braking system 5 (hereinafter, ABS 5), and the like.
- These control systems 2 to 5 and the advanced driving system 1 are connected to an in-vehicle local network (hereinafter referred to as an in-vehicle LAN) (not shown).
- the control systems 2 to 5 and the advanced driving system 1 are configured to share control information such as control commands and control amounts with each other through communication via the in-vehicle LAN.
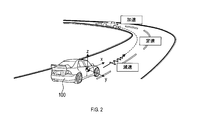
- the advanced driving system 1 performs acceleration / deceleration control so that the vehicle 100 automatically travels without being operated by the driver in a state where the system is in operation, and in a state where the operation of the system is released, Delegate authority for driving operations to the driver or another control system. Further, as shown in FIG. 2, the advanced driving system 1 includes an acceleration / deceleration control unit 10 so that a deceleration zone at the time of entering a curve, a constant speed zone at the time of curve driving, and an acceleration zone at the end of the curve can be obtained appropriately. Thus, the acceleration / deceleration of the vehicle 100 is controlled.
- the axis along the vehicle length direction (that is, the front-rear direction) of the vehicle 100 is the x axis
- the vehicle width direction (that is, the lateral direction) of the vehicle 100 is aligned.
- the axis is appropriately expressed as the y-axis
- the axis along the vehicle height direction (ie, the vertical direction) of the vehicle 100 is appropriately expressed as the z-axis.
- These x-axis, y-axis, and z-axis are axes orthogonal to each other.
- a locator 6, an altitude map information storage unit 7, a sensor 8, an indoor display 9, a speaker 11, and an input device 12 are connected to the advanced driving system 1.
- the sensor 8 includes a vehicle speed sensor, an acceleration sensor, a gyro sensor, an image sensor, a radar sensor, an accelerator position sensor, a brake position sensor, a shift position sensor, and a steering sensor (not shown).
- the vehicle speed sensor is a sensor that detects the current speed of the vehicle 100.
- the acceleration sensor is a sensor that detects an x-axis current acceleration Gx, a y-axis current acceleration Gy, and a z-axis current acceleration Gz in the vehicle 100, respectively.
- the gyro sensor is a sensor that detects an angular velocity (that is, a yaw rate) that rotates each of the x, y, and z axes.
- the image sensor and the radar sensor are sensors that detect various targets such as obstacles, other vehicles, pedestrians, signs, lane boundary lines, buildings, and the like that exist around the vehicle 100, road surface conditions, and the like.
- the accelerator position sensor is a sensor that detects the depression position and depression speed of the accelerator pedal.
- the brake position sensor is a sensor that detects the depression position and depression speed of the brake pedal.
- the shift position sensor is a sensor that detects a shift lever position.
- the steering sensor is a sensor that detects the steering angle of the steering wheel.
- the locator 6 is a device that receives radio waves from the quasi-zenith satellite or GPS satellite and generates position information indicating the current position of the vehicle 100.
- the current position indicated by the position information is supplemented using a detection result of at least one of a vehicle speed sensor, an acceleration sensor, a gyro sensor, an image sensor, and a radar sensor.
- the altitude map information storage unit 7 is an apparatus that stores altitude map information in which environmental information including the current position of the vehicle 100 is associated with map information indicating a road shape including a road gradient and a radius of curvature.
- the map information includes not only road information including nodes and links, but also three-dimensional coordinates indicated by each node, road width indicated by each link, road curvature radius, road gradient, etc.
- the speed limit (that is, the legal speed) related to the is stored.
- the node which road information shows is provided for every lane of each road, and many nodes are provided so that link length may become shorter than what is used with a general navigation apparatus. These nodes are also provided at the change points of the road gradient.
- the indoor display 9 is an image display provided in the passenger compartment of the vehicle 100.
- the indoor display 9 includes a meter display and a head-up display in addition to a liquid crystal display installed on a center console, a dashboard, and the like.
- the head-up display displays a notification to notify the driver in advance or the road shape ahead of the host vehicle. Is done.
- the speaker 11 is provided in the passenger compartment of the vehicle 100, and outputs a sound for notifying the driver of the start or stop of the operation of the advanced driving system 1 in addition to various voice guidances and alarms.
- the powertrain system 2 controls the drive source and transmission of the vehicle 100 according to the drive command value output from the advanced driving system 1 when the advanced driving system 1 is operating.
- the power train system 2 controls the opening degree of the throttle device and the fuel injection amount when an internal combustion engine is mounted as a drive source, and applies power to the motor when a motor is mounted as a drive source. Control the power supply. Further, the powertrain system 2 mainly performs control according to the detection values of the accelerator position sensor and the shift position sensor in a state where the operation of the advanced operation system 1 is released. However, the powertrain system 2 performs control according to the drive command value output from the TCS in a state where the TCS described later is operating.
- the brake system 3 controls, for example, an actuator provided in a hydraulic circuit of a hydraulic brake in accordance with a drive command value output from the advanced operation system 1 when the advanced operation system 1 is in operation.
- the brake system 3 may be configured to generate a braking force by regenerative braking by controlling power supplied to the motor.
- the brake system 3 mainly performs control according to the detection value of the brake position sensor in a state where the operation of the advanced operation system 1 is released. However, the brake system 3 performs control according to the drive command value output from the TCS or ABS 5 while the TCS or ABS 5 is operating.
- Steering system 4 controls the rotation direction and amount of the pinion gear provided in the steering mechanism in accordance with the steering command value output from advanced driving system 1 when advanced driving system 1 is in operation. Further, the steering system 4 mainly performs control according to the detected value of the steering sensor in a state where the operation of the advanced driving system 1 is released. Note that the steering system 4 may be configured to perform control according to the detected value of the steering sensor even when the advanced driving system 1 is operating. The steering system 4 performs steering assist control for generating torque for assisting the steering operation of the driver in accordance with the steering command value output from the advanced driving system 1 in a state where the advanced driving system 1 is in operation. It may be configured as follows.
- ABS 5 is a well-known system that reduces the occurrence of sliding due to wheel locking when the host vehicle 100 is decelerated.
- the ABS 5 controls the brake system 3 when it is determined that the rotation of the wheel exceeds a predetermined deceleration based on the detection result of the vehicle speed sensor.
- the ABS 5 is configured to output information indicating the respective timings to the advanced driving system 1 at the start and end of the control of the brake system 3.
- a traction control system (hereinafter, TCS) (not shown) is mounted in addition to the ABS 5.
- the TCS monitors the ground contact state between the wheels and the road surface. For example, when the idling of the driving wheel is detected when the vehicle 100 is started or accelerated, the TCS controls the brake system 3 and the powertrain system 2 to thereby prevent the vehicle 100 from slipping. It is a well-known system for suppressing.
- the TCS is also configured to output information indicating the respective timings to the advanced driving system 1 at the start and end of the control of the brake system 3 and the powertrain system 2.
- the advanced driving system 1 includes an acceleration / deceleration control unit 10, a steering control unit 15, and a human machine interface control unit 16 (hereinafter, HMI control unit 16).
- Each of these control units 10, 15, and 16 is configured around a well-known microcomputer having a CPU 13 and a semiconductor memory (hereinafter referred to as a memory 14) such as a RAM, a ROM, and a flash memory.
- a memory 14 such as a RAM, a ROM, and a flash memory.
- Various functions of the control units 10, 15, and 16 are realized by the CPU 13 executing a program stored in a non-transitional physical recording medium.
- the memory 14 corresponds to a non-transitional tangible recording medium that stores a program. Also, by executing this program, a method corresponding to the program is executed.
- the number of microcomputers constituting each control unit 10, 15, 16 may be one or plural.
- a plurality of control units 10, 15, and 16 may be configured by one microcomputer.
- the HMI control unit 16 is a unit that performs control for notifying the driver of necessary information via the indoor display 9 and the speaker 11 based on inputs from the acceleration / deceleration control unit 10 and the steering control unit 15.
- the front acquisition unit 17 is configured to acquire a road shape in front of the host vehicle. Specifically, the forward acquisition unit 17 is based on the current position of the vehicle 100 acquired by the position acquisition unit 18 and the road information around the current position of the vehicle 100 output from the altitude map information storage unit 7. A road shape including a road gradient in front of the host vehicle and a curvature radius of the road is acquired. Moreover, the front acquisition part 17 may be comprised so that the road shape ahead of the own vehicle may be correct
- the position acquisition unit 18 is configured to acquire the current position of the host vehicle. Specifically, the position acquisition unit 18 acquires the current position of the vehicle 100 by correcting the current position indicated by the position information output from the locator 6 using the detection result of the sensor 8.
- the state acquisition unit 19 is configured to acquire the traveling state of the host vehicle. Specifically, the state acquisition unit 19 mainly uses the current speed of the vehicle 100, the current acceleration Gx, Gy, Gz, the steering angle, and the yaw rate as the traveling state of the vehicle 100 based on the information output from the sensor 8. Etc.
- the current accelerations Gx, Gy, and Gz represent acceleration of the vehicle 100 when they are positive values, and represent deceleration of the vehicle 100 when they are negative values.
- the state acquisition unit 19 calculates jerks ⁇ Gx, ⁇ Gy, ⁇ Gz indicating the rate of change of acceleration per unit time based on the previous value and the current value regarding the current acceleration Gx, Gy, Gz.
- the command calculation unit 20 includes a limit value setting block 22, a road shape calculation block 23, a target motion value calculation block 24, and a command value calculation block 25.
- the limit value setting block 22 is configured to set a value that limits at least one of the speed, acceleration, and jerk of the host vehicle (hereinafter, limit value). Of these limit values, values previously input by the user (hereinafter referred to as user set values) are stored in the memory 14. For example, the limit value setting block 22 selects either the user set value or the legal speed related to the road on which the host vehicle is traveling as the speed limit value (hereinafter, speed limit value), and the selected speed. The limit value is output to the target motion value calculation block 24 as Vlim. Specifically, the limit value setting block 22 outputs the smaller speed limit value of the user set value and the legal speed as Vlim. The legal speed is read from the altitude map information storage unit 7.
- the limit value setting block 22 uses at least one limit value among a limit value related to acceleration (hereinafter referred to as acceleration limit value) and a limit value related to jerk (hereinafter referred to as jerk limit value) as a target exercise value calculation block. 24.
- the limit value setting block 22 outputs an acceleration limit value or jerk limit value input in advance as a user set value, together with the speed limit value Vlim, to the target motion value calculation block 24.
- the acceleration limit value and the acceleration / deceleration limit value are values expressed as absolute values, and are set in advance for each of the x axis, the y axis, and the z axis.
- the acceleration limit value for limiting the vertical acceleration of the host vehicle is Gzmax
- the acceleration limit value for limiting the lateral acceleration of the host vehicle is Gymax
- the acceleration in the front-rear direction of the host vehicle is set.
- Gxmax be the acceleration limit value that limits
- the acceleration / deceleration limit value for limiting the vertical acceleration of the host vehicle is ⁇ Gzmax
- the acceleration / deceleration limit value for limiting the lateral acceleration of the host vehicle is ⁇ Gymax
- the front / rear direction of the host vehicle A jerk limit value for limiting the jerk is ⁇ Gxmax.
- the road shape calculation block 23 is configured to perform calculations related to the road shape ahead of the host vehicle. Specifically, the road shape calculation block 23 is configured to calculate the amount of change in road gradient at each node ahead of the host vehicle based on the road shape ahead of the host vehicle acquired by the front acquisition unit 17. The amount of change in road gradient at a node is represented by the difference in road gradient indicated by each of the two links connected to the node.
- the target motion value calculation block 24 is configured to calculate the target motion value of the host vehicle. Specifically, the target motion value calculation block 24 is based on the road shape ahead of the host vehicle and the current position of the host vehicle, and at least one value of the target speed and target acceleration at each point on the road ahead of the host vehicle. Is calculated as a target exercise value. In the present embodiment, the target motion value calculation block 24 is configured to calculate a target speed at each node ahead of the host vehicle and to output the calculated target speed to the command value calculation block 25.
- the command value calculation block 25 is configured to calculate a drive command value. Specifically, the command value calculation block 25 calculates the target acceleration at each node ahead of the host vehicle based on the target speed calculated by the target motion value calculation block 24 and the current speed of the host vehicle. Then, the command value calculation block 25 calculates a driving command value in the front-rear direction to be generated by the host vehicle based on the calculated target acceleration.
- the target acceleration represents acceleration of the vehicle 100 when it is a positive value, and represents deceleration of the vehicle 100 when it is a negative value.
- the command value calculation block 25 is configured to output the calculated drive command value to the powertrain system 2 and the brake system 3 via the command value output unit 21.
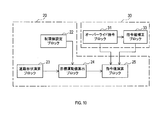
- the output control unit 30 includes an override command block 31 and a limit value correction block 32.
- the override command block 31 is configured to control the output of the drive command value by the command value output unit 21 based on an input from at least one of the operation of the driver of the host vehicle and another control system in the host vehicle.
- the override command block 31 detects any one of an accelerator pedal, a brake pedal, and a shift lever as a driver's operation based on a detection result by the sensor 8.
- the override command block 31 outputs a switching signal “0” to the command value calculation block 25, for example, when it is determined that the accelerator pedal or the brake pedal is depressed by a predetermined amount or more. Further, for example, the override command block 31 outputs a switching signal “0” to the command value calculation block 25 when it is determined that a shift down or a shift up related to the gear of the transmission has been made.
- the override command block 31 outputs a switching signal “0” to the command value calculation block 25 when timing information related to the start of control is input from the ABS 5 or TSC as another control system.
- the switching signal “0” is output in this way, the calculation of the drive command value by the command value calculation block 25 is stopped, and as a result, the output of the drive command value by the command value output unit 21 is stopped.
- the operation of the advanced operation system 1 is released. That is, the driving authority is delegated from the advanced driving system 1 to the driver and other control systems.
- the override command block 31 detects that all operations of the accelerator pedal, the brake pedal, and the shift lever are not performed, or when timing information related to the end of control is input from the ABS 5 or TSC,
- the switching signal “1” is output to the value calculation block 25.
- the switching signal “1” is output in this way, the calculation of the drive command value by the command value calculation block 25 is resumed.
- the output of the drive command value by the command value output unit 21 is resumed.
- the operation of the advanced operation system 1 is restored. That is, the driving authority is delegated from the driver or another control system to the advanced driving system 1.
- the limit value correction block 32 is an acceleration limit value or acceleration that is output from the limit value setting block 22 when the output of the drive command value is stopped and then restarted by the output control of the drive command value by the override command block 31.
- the limit value is configured to be temporarily reduced. Specifically, the limit value correction block 32 temporarily decreases the acceleration limit value when the limit value setting block 22 is configured to output the acceleration limit value. Further, the limit value correction block 32 temporarily decreases the acceleration / deceleration limit value when the limit value setting block 22 is configured to output the acceleration / deceleration limit value.
- “decrease value” means “decrease absolute value”.
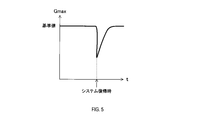
- the limit value correction block 32 temporarily decreases the acceleration limit value as shown in FIG. After that, the limit value correction block 32 outputs a command for gradually increasing the acceleration limit value to the limit value setting block 22 to the reference value that is the acceleration limit value before being reduced.
- the increase rate of the acceleration limit value may be linear or non-linear.
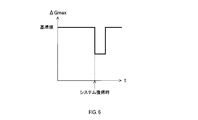
- the limit value correction block 32 temporarily reduces the acceleration / deceleration limit value as shown in FIG. 6 when the operation of the advanced operation system 1 is restored. After the elapse of a predetermined period, the limit value correction block 32 outputs a command for returning the acceleration / deceleration limit value to the reference value, which is the acceleration / deceleration limit value before being reduced, to the limit value setting block 22.
- Gmax indicates at least one acceleration limit value among Gzmax, Gymax, and Gxmax.
- ⁇ Gmax indicates at least one acceleration / deceleration limit value among ⁇ Gzmax, ⁇ Gymax, and ⁇ Gxmax. That is, the limit value correction block 32 is configured to return at least one acceleration limit value of Gzmax, Gymax, and Gxmax or at least one acceleration limit value of ⁇ Gzmax, ⁇ Gymax, and ⁇ Gxmax when the advanced operation system 1 returns to operation. Is variably set. In the present embodiment, the limit value correction block 32 is configured to variably set Gxmax or ⁇ Gxmax when the operation of the advanced operation system 1 is restored.
- the limit value correction block 32 variably sets Gxmax when the limit value setting block 22 is configured to output an acceleration limit value. Further, the limit value correction block 32 variably sets ⁇ Gxmax when the limit value setting block 22 is configured to output the acceleration / deceleration limit value.
- the target motion value calculation process is a process for calculating a target speed at each node ahead of the host vehicle.
- target nodes are extracted in order along the road shape from a node close to the current position of the vehicle 100, and a target speed at each extracted node (hereinafter, target node) is calculated. Further, the target exercise value calculation process is repeatedly executed while the advanced driving system 1 is in operation.
- the target exercise value calculation block 24 is first configured in step (hereinafter referred to as S) 110 when the limit value setting block 22 is configured to output the acceleration / deceleration limit value. 22, ⁇ Gzmax, ⁇ Gymax, and ⁇ Gxmax are acquired as acceleration / deceleration limit values.
- the target motion value calculation block 24 obtains Gzmax, Gymax, and Gxmax as acceleration limit values by multiplying the current accelerations Gz, Gy, Gx by ⁇ Gzmax, ⁇ Gymax, and ⁇ Gxmax, respectively, acquired in S110. .
- the target motion value calculation block 24 is extracted this time by multiplying this acceleration limit value by the acceleration / deceleration limit value acquired in S110.
- the acceleration limit value related to the target node is acquired. This calculation becomes unnecessary when the limit value setting block 22 is configured to output the acceleration limit value.
- the target exercise value calculation block 24 can acquire Gzmax, Gymax, and Gxmax as the acceleration limit values from the limit value setting block 22.
- the target motion value calculation block 24 acquires the curvature radius of the road, the change amount of the road gradient, and the inter-node distance calculated by the road shape calculation block 23.
- the radius of curvature of the road at the target node is acquired from information related to one of the two links connected to the target node.
- the inter-node distance is a distance (that is, a link length) between the target node extracted last time and the target node extracted this time.
- the target motion value calculation block 24 calculates a speed limit value for limiting the target speed of the host vehicle based on Gymax acquired in S120 and the curvature radius of the road in the target node acquired in S130. Can be calculated. Note that the speed limit value calculated here is Vymax.
- Vymax is calculated as follows. It is assumed that the vehicle 100 performs a steady circular turn in the xy plane as shown in FIG. A curve shown in FIG. 8 represents a curved road shape in front of the host vehicle. Further, each point on the curve shown in FIG. 8 represents each node in front of the host vehicle.
- Vymax the maximum value of the vehicle speed V satisfying the inequality of the following equation (1) based on the definition of the centrifugal force applied to the vehicle 100 is calculated as Vymax as the following equation (2).
- M represents the weight of the vehicle 100 and R represents the curvature radius of the road.
- Vymax can be calculated based on Gymax and the radius of curvature of the road according to equation (2).
- Vymax can also be calculated using the coordinate information of the node instead of the curvature radius of the road.
- the angle of the direction of the vehicle 100 at the node extracted this time is determined from ⁇ n ⁇ 1 that indicates the direction of the vehicle 100 at the target node extracted in the previous angle in ⁇ t seconds, which is the time for the vehicle 100 to move between the nodes. It is assumed that the direction of the vehicle 100 has changed to ⁇ n indicated by. In this case, the yaw rate ⁇ of the vehicle 100 is expressed by the following equation (3). In equation (3), ⁇ n represents the amount of change in the direction of the vehicle 100.
- equation (7) is obtained by substituting equation (6) into equation (1).
- Vymax can be calculated based on Gymax, the amount of change in the direction of the vehicle 100, and the inter-node distance, as shown in Expression (7).
- the amount of change in the direction of the vehicle 100 can be obtained from the coordinates of each node.
- the target motion value calculation block 24 limits the target speed of the host vehicle using the Gzmax acquired in S120 and the change amount of the road gradient in the target node acquired in S130 in subsequent S150.
- a speed limit value for calculating the speed is calculated. Note that the speed limit value calculated here is Vzmax.
- Vzmax is calculated as in the following equation (8).
- ⁇ Lz represents the distance between nodes in the xz plane
- ⁇ n represents the amount of change in road gradient.
- Vzmax can be calculated based on Gzmax, the amount of change in the road gradient, and the inter-node distance in the xz plane, as shown in Expression (8).
- the target exercise value calculation block 24 acquires Vlim selected by the limit value setting block 22 in S160.
- the target exercise value calculation block 24 selects the smallest value among Vymax calculated in S140, Vzmax calculated in S150, and Vlim acquired in S160.
- the speed limit value selected here is assumed to be Vmax.
- the target motion value calculation block 24 calculates a target speed that satisfies Vmax that is the speed limit value selected in S170 and Gxmax among the acceleration limit values acquired in S120 as constraints. Then, this process ends. Specifically, the target motion value calculation block 24 has a maximum value in a range where the speed of the target node extracted this time is equal to or lower than Vmax and the rate of change with respect to the speed of the target node extracted last time is equal to or lower than Gxmax. Calculate the speed. Thereby, the target motion value calculation block 24 calculates the optimized target speed.
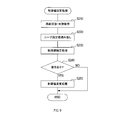
- limit value setting process Next, processing executed by the limit value setting block 22 (hereinafter, limit value setting process) will be described with reference to the flowchart of FIG.
- the limit value setting process is repeatedly executed while the advanced operation system 1 is operating.
- the limit value setting block 22 first acquires information indicating the road surface condition regarding the road ahead of the host vehicle and the weather around the host vehicle from the front acquisition unit 17 in S210. Then, the limit value setting block 22 reads the limit value stored as the user set value from the memory 14 in subsequent S220.
- the limit values read from the memory 14 include an acceleration limit value, a jerk limit value, and a speed limit value.
- the limit value setting block 22 corrects the limit value read in S220 based on at least one of the road surface condition and weather information acquired in S210 (hereinafter, limit value correction). Process). For example, in the limit value correction process, when the road surface is wet, when it is a snowy road surface, a frozen road surface, or when the weather is rain or snow, the acceleration limit value, acceleration limit value, and speed limit value are set. Reduce at least one of the limits. The limit value corrected in this way is used as a limit value output from the limit value setting block 22 to the target exercise value calculation block 24.
- the limit value setting block 22 determines the presence / absence of a command from the limit value correction block 32. If it is determined that there is no command from the limit value correction block 32, the present process is terminated. On the other hand, when it is determined that there is a command from the limit value correction block 32, the limit value setting block 22 performs a limit value changing process according to the command in S250, and ends this process. In the limit value change process, the target motion value is calculated so that the acceleration limit value or acceleration / deceleration limit value is temporarily reduced, and then the acceleration limit value or acceleration / deceleration limit value is gradually increased to the reference value before reduction. This is a process of variably setting the limit value output to the block 24.
- Vzmax calculated using Gzmax and the amount of change in road gradient is used for adjustment of the drive command value by the command calculation unit 20, an excessive acceleration / deceleration force in the vertical direction of the host vehicle is not applied.
- the vehicle speed can be suitably obtained.
- the output control unit 30 is configured to stop the output of the drive command value based on an input by at least one of an accelerator operation, a brake operation, and a shift operation as a driver's operation. Therefore, for example, the advanced driving system 1 can be suitably canceled when the driver depresses an accelerator pedal or a brake pedal or performs a downshift or upshift operation in order to accelerate or decelerate the host vehicle. Further, when the advanced driving system 1 returns, restrictions on acceleration / deceleration of the host vehicle are strengthened, so that it is possible to suppress the occurrence of strong acceleration / deceleration that does not follow the driver's feeling.
- the output control unit 30 stops the output of the drive command value based on the input by the control system that prevents the wheels of the host vehicle from slipping. For this reason, for example, the advanced driving system 1 can be suitably canceled by the operation of the ABS 5 or the TCS. Further, when the advanced driving system 1 returns, the restriction on acceleration / deceleration of the host vehicle is strengthened, so that the behavior of the host vehicle becomes more stable. Therefore, it is possible to suppress the restart of the ABS 5 or the TCS. it can.
- the limit value correction block 32 outputs a command for temporarily reducing the acceleration limit value or the acceleration / deceleration limit value to the limit value setting block 22.
- the limit value correction block 32 outputs a command for temporarily reducing the drive command value to the command value calculation block 25. It is different from the embodiment.
- the limit value correction block 32 is driven by the command value calculation block 25 when the output of the drive command value is stopped and then restarted by the output control of the drive command value by the override command block 31.
- the command value is configured to be temporarily reduced.
- the limit value correction block 32 variably sets a coefficient to be multiplied by the drive command value output from the command value calculation block 25 within the range of 0 to 1 when the advanced operation system 1 returns to operation.
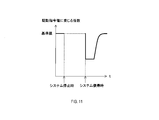
- the limit value correction block 32 can temporarily reduce the drive command value and then gradually increase the drive command value, for example, to the drive command value before being reduced. That is, as shown in FIG. 11, the limit value correction block 32 temporarily reduces the adjustment value (that is, the coefficient) by which the drive command value is multiplied when the operation of the advanced operation system 1 is restored.
- the limit value correction block 32 is configured to gradually increase the coefficient to a reference value (that is, a value of “1”) that is a coefficient before the operation of the advanced operation system 1 is stopped after a predetermined period.
- the limit value correction block 32 may be configured to temporarily reduce the drive command value by variably setting a coefficient by which the target acceleration calculated by the command value calculation block 25 is multiplied.
- the target motion value calculation block 24 calculates the target speed
- the command value calculation block 25 calculates the target acceleration based on the target speed.
- the configuration for calculating the target acceleration is as follows. It is not limited to this.
- the target motion value calculation block 24 may calculate both the target speed and the target acceleration
- the command value calculation block 25 may calculate the drive command value based on the target acceleration.
- a plurality of functions of one constituent element in the above embodiment may be realized by a plurality of constituent elements, or a single function of one constituent element may be realized by a plurality of constituent elements. . Further, a plurality of functions possessed by a plurality of constituent elements may be realized by one constituent element, or one function realized by a plurality of constituent elements may be realized by one constituent element. Moreover, you may abbreviate
- at least a part of the configuration of the above embodiment may be added to or replaced with the configuration of the other embodiment.
- all the aspects included in the technical idea specified from the wording described in the claims are embodiments related to one aspect of the present disclosure.
- an in-vehicle system having the advanced operating system 1 as a constituent element an acceleration / deceleration control unit 10 constituting the advanced operating system 1, the advanced operating system 1, the in-vehicle system, or the One aspect of the present disclosure in various forms, such as a program for causing a computer to function as the acceleration / deceleration control unit 10, a non-transition actual recording medium such as a semiconductor memory storing the program, a driving support method, and an acceleration / deceleration control method Can also be realized.
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Mathematical Physics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Human Computer Interaction (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
- Traffic Control Systems (AREA)
Abstract
指令演算部(20)は、自車両前方の道路上の各地点における目標速度を算出し、この目標速度および自車両の現在速度に基づいて、自車両に発生させる前後方向の駆動指令値を演算する際に、自車両の加速度を制限する加速制限値、又は自車両の加加速度を制限する加加速制限値を用いて駆動指令値を調整するように構成される。出力制御部(30)は、自車両の運転者の操作および自車両における他の制御システムのうちの少なくとも一方による入力に基づいて、駆動指令値の出力を制御するように構成される。また、出力制御部は、駆動指令値の出力を停止させた後に再開させる際に、加速制限値、加加速制限値および駆動指令値のうちの少なくとも一つの値を一時的に小さくするように構成される。
Description
本国際出願は、2016年9月8日に日本国特許庁に出願された日本国特許出願第2016-175525号に基づく優先権を主張するものであり、日本国特許出願第2016-175525号の全内容を本国際出願に参照により援用する。
本開示は、自車両の加減速を制御する技術に関する。
自車両の加減速を制御する加減速制御システムにおいて、カーブ進入時の減速区間、カーブ走行時の定速区間、カーブ終了時の加速区間がそれぞれ適切に得られるように、自車両の加減速を制御する技術が知られている。
例えば、特許文献1には、カーブ上の各ノードにおける旋回半径と、自車両の横加速度設定値とを用いて、各ノードにおける目標速度を算出する加減速制御システムが記載されている。また、この加減速制御システムでは、算出された目標速度と、自車両の現在速度とに基づいて、自車両の前後方向の目標加速度が算出される。また、この加減速制御システムは、算出された目標加速度から、自車両の前後方向の加減速に関する変化量リミッタが付加された駆動指令値を求めるように構成されている。
このように特許文献1における加減速制御システムは、横加速度設定値を用いることによって、横方向における過度な遠心力が自車両の乗員にかかりにくくなるように構成されている。また、加減速制御システムは、加減速に関する変化量リミッタを用いることによって、前後方向における過度な加減速力が自車両の乗員にかかりにくくなるように構成されている。
しかしながら、発明者の詳細な検討の結果、以下の課題が見出された。例えば、自車両を減速させようとして運転者がブレーキペダルを踏み込むことによって、加減速制御システムが解除され、その後、運転者がブレーキペダルを離すことによって、加減速制御システムが復帰する場合に、以下の課題があった。すなわち、この場合に発生する自車両の加速は、運転者が自らの意思により減速させた後になされるため、通常時の加減速制御システムによる加速よりも強い加速感を運転者に与えてしまう可能性があった。
また例えば、自車両を加速させようとして運転者がアクセルペダルを踏み込むことによって、加減速制御システムが解除され、その後、運転者がアクセルペダルを離すことによって、加減速制御システムが復帰する場合にも、以下の課題があった。すなわち、この場合に発生する自車両の減速は、運転者が自らの意思により加速させた後になされるため、通常時の加減速制御システムによる減速よりも強い減速感を運転者に与えてしまう可能性があった。
また例えば、アンチロックブレーキシステム等が作動することによって、加減速制御システムが解除され、その後、車両の挙動が安定することによって、加減速制御システムが復帰する場合にも、以下の課題があった。すなわち、この場合に発生する加速によって、自車両の挙動が再び不安定になることで、アンチロックブレーキシステム等が再作動してしまい、運転者に違和感を与えてしまう可能性があった。
本開示の一局面は、自車両の加減速制御が一時的に解除された後に復帰するに際して、運転者になるべく違和感を与えないようにすることが可能な技術を提供することにある。
本開示の一態様である加減速制御システムは、指令演算部と、出力制御部と、を備える。指令演算部は、自車両前方の道路形状および自車両の現在位置に基づいて、自車両前方の道路上の各地点における目標速度を算出し、この目標速度および自車両の現在速度に基づいて、自車両に発生させる前後方向の駆動指令値を演算する際に、自車両の加速度を制限する加速制限値、又は自車両の加加速度を制限する加加速制限値を用いて前記駆動指令値を調整するように構成される。
本開示の一態様である加減速制御システムは、指令演算部と、出力制御部と、を備える。指令演算部は、自車両前方の道路形状および自車両の現在位置に基づいて、自車両前方の道路上の各地点における目標速度を算出し、この目標速度および自車両の現在速度に基づいて、自車両に発生させる前後方向の駆動指令値を演算する際に、自車両の加速度を制限する加速制限値、又は自車両の加加速度を制限する加加速制限値を用いて前記駆動指令値を調整するように構成される。
出力制御部は、自車両の運転者の操作および自車両における他の制御システムのうちの少なくとも一方による入力に基づいて、駆動指令値の出力を制御するように構成される。また、出力制御部は、駆動指令値の出力を停止させた後に再開させる際に、加速制限値、加加速制限値および駆動指令値のうちの少なくとも一つの値を一時的に小さくするように構成される。
このような構成によれば、運転操作や他の制御システムによる介入終了後に、自車両の加減速に関する制限が強化されることによって、自車両の挙動がより安定しやすくなる。このため、自車両の加減速制御が一時的に解除された後に復帰するに際して、運転者になるべく違和感を与えないようにすることができる。
なお、請求の範囲に記載した括弧内の符号は、一つの態様として後述する実施形態に記載の具体的手段との対応関係を示すものであって、本開示の一態様の技術的範囲を限定するものではない。
以下、図面を参照しながら、本開示の実施形態を説明する。
[1.第1実施形態]
[1-1.全体構成]
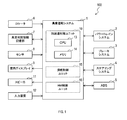
図1に示すように、車両100には、自車両の加減速を制御する加減速制御ユニット10を含む高度運転システム1が搭載されている。なお、高度運転システム1が、加減速制御システムに相当する。
[1.第1実施形態]
[1-1.全体構成]
図1に示すように、車両100には、自車両の加減速を制御する加減速制御ユニット10を含む高度運転システム1が搭載されている。なお、高度運転システム1が、加減速制御システムに相当する。
また、車両100には、パワートレインシステム2、ブレーキシステム3、ステアリングシステム4及びアンチロックブレーキングシステム5(以下、ABS5)等といった各種の制御システムが搭載されている。これらの制御システム2~5及び高度運転システム1は、非図示の車内ローカルネットワーク(以下、車内LAN)にそれぞれ接続されている。これらの制御システム2~5及び高度運転システム1は、この車内LANを介した通信により、相互に制御指令や制御量などの制御情報を共有するように構成されている。
高度運転システム1は、本システムが作動中の状態においては、運転者が操作することなく、車両100が自動走行するように加減速制御を行い、本システムの作動が解除された状態においては、運転操作に係る権限を運転者または他の制御システムに委譲する。また、高度運転システム1は、図2に示すように、カーブ進入時の減速区間、カーブ走行時の定速区間、カーブ終了時の加速区間がそれぞれ適切に得られるように、加減速制御ユニット10によって、車両100の加減速が制御されるように構成されている。
なお、以下の説明においては、図2に示すように、車両100の車長方向(即ち、前後方向)に沿った軸をx軸、車両100の車幅方向(即ち、横方向)に沿った軸をy軸、車両100の車高方向(即ち、上下方向)に沿った軸をz軸と適宜表記する。これらのx軸、y軸およびz軸は、互いに直交する軸である。
図1に戻り、高度運転システム1には、ロケータ6、高度地図情報記憶部7、センサ8、室内ディスプレイ9、スピーカ11及び入力装置12が接続されている。
センサ8には、非図示の車速センサ、加速度センサ、ジャイロセンサ、画像センサ、レーダセンサ、アクセルポジションセンサ、ブレーキポジションセンサ、シフトポジションセンサ及びステアリングセンサが含まれる。車速センサは、車両100の現在速度を検出するセンサである。加速度センサは、車両100におけるx軸の現在加速度Gx、y軸の現在加速度Gy及びz軸の現在加速度Gzをそれぞれ検出するセンサである。ジャイロセンサは、x、y、zの各軸を回転する角速度(即ち、ヨーレート)をそれぞれ検出するセンサである。画像センサ及びレーダセンサは、車両100の周辺に存在する障害物、他車両、歩行者、標識、車線境界線、建造物等の各種物標や、路面状態などを検出するセンサである。アクセルポジションセンサは、アクセルペダルの踏込位置および踏込速度を検出するセンサである。ブレーキポジションセンサは、ブレーキペダルの踏込位置および踏込速度を検出するセンサである。シフトポジションセンサは、シフトレバー位置を検出するセンサである。ステアリングセンサは、ステアリングホイールの操舵角を検出するセンサである。
センサ8には、非図示の車速センサ、加速度センサ、ジャイロセンサ、画像センサ、レーダセンサ、アクセルポジションセンサ、ブレーキポジションセンサ、シフトポジションセンサ及びステアリングセンサが含まれる。車速センサは、車両100の現在速度を検出するセンサである。加速度センサは、車両100におけるx軸の現在加速度Gx、y軸の現在加速度Gy及びz軸の現在加速度Gzをそれぞれ検出するセンサである。ジャイロセンサは、x、y、zの各軸を回転する角速度(即ち、ヨーレート)をそれぞれ検出するセンサである。画像センサ及びレーダセンサは、車両100の周辺に存在する障害物、他車両、歩行者、標識、車線境界線、建造物等の各種物標や、路面状態などを検出するセンサである。アクセルポジションセンサは、アクセルペダルの踏込位置および踏込速度を検出するセンサである。ブレーキポジションセンサは、ブレーキペダルの踏込位置および踏込速度を検出するセンサである。シフトポジションセンサは、シフトレバー位置を検出するセンサである。ステアリングセンサは、ステアリングホイールの操舵角を検出するセンサである。
また、入力装置12には、ユーザの入力操作を受け付ける非図示のタッチパネルやメカニカルなスイッチ等のほか、通信装置が含まれる。通信装置は、無線通信によって、他車両との車車間通信や、インフラとの路車間通信を実行するほか、インターネット網に接続することで、車両100の周辺の天候などを含む各種情報を取得することができる。
ロケータ6は、準天頂衛星やGPS衛星からの電波を受信して車両100の現在位置を示す位置情報を生成する装置である。位置情報が示す現在位置は、車速センサ、加速度センサ、ジャイロセンサ、画像センサ及びレーダセンサのうちの少なくとも一つの検出結果を用いて補完される。
高度地図情報記憶部7は、道路勾配および曲率半径などを含む道路形状を示す地図情報に、車両100の現在位置などを含む環境情報を対応付けた高度地図情報を記憶する装置である。地図情報には、ノード及びリンクを含む道路情報の他、各ノードが示す3次元座標や、各リンクが示す道路幅、道路の曲率半径、道路勾配などを含む立体的な道路形状や、各道路に係る制限速度(即ち、法定速度)等が記憶されている。なお、道路情報が示すノードは、各道路の車線ごとに設けられており、一般的なナビゲーション装置で用いられるものよりもリンク長が短くなるように多数設けられている。また、これらのノードは、道路勾配の変化点にも設けられている。
室内ディスプレイ9は、車両100の車室内に設けられる画像表示用のディスプレイである。室内ディスプレイ9には、センターコンソールやダッシュボード等に設置される液晶ディスプレイのほか、メータディスプレイやヘッドアップディスプレイが含まれる。例えば、ヘッドアップディスプレイには、高度運転システム1が作動中の状態において、車両100の加減速制御が行われる際に、事前に運転者に予告する通知や、自車両前方の道路形状などが表示される。スピーカ11は、車両100の車室内に設けられ、各種の音声案内や警報などのほか、高度運転システム1の作動開始や作動停止を運転者に予告する通知を音により出力する。
パワートレインシステム2は、高度運転システム1が作動中の状態においては、高度運転システム1から出力される駆動指令値に従って、車両100の駆動源およびトランスミッションを制御する。また、パワートレインシステム2は、駆動源として内燃機関を搭載している場合にはスロットル装置の開度および燃料噴射量などを制御し、駆動源としてモータを搭載している場合にはモータへの供給電力などを制御する。また、パワートレインシステム2は、高度運転システム1の作動が解除された状態においては、主に、アクセルポジションセンサ及びシフトポジションセンサの検出値に従った制御を行う。ただし、パワートレインシステム2は、後述するTCSが作動中の状態においては、TCSから出力される駆動指令値に従った制御を行う。
ブレーキシステム3は、高度運転システム1が作動中の状態においては、高度運転システム1から出力される駆動指令値に従って、例えば油圧式ブレーキの液圧回路に設けられたアクチュエータ等を制御する。なお、ブレーキシステム3は、モータへの供給電力を制御して回生ブレーキによる制動力を生成するように構成されても良い。また、ブレーキシステム3は、高度運転システム1の作動が解除された状態においては、主に、ブレーキポジションセンサの検出値に従った制御を行う。ただし、ブレーキシステム3は、TCS又はABS5が作動中の状態においては、TCS又はABS5から出力される駆動指令値に従った制御を行う。
ステアリングシステム4は、高度運転システム1が作動中の状態においては、高度運転システム1から出力される操舵指令値に従って、ステアリング機構に設けられたピニオンギアの回転方向および回転量などを制御する。また、ステアリングシステム4は、高度運転システム1の作動が解除された状態においては、主に、ステアリングセンサの検出値に従った制御を行う。なお、ステアリングシステム4は、高度運転システム1が作動中の状態においても、ステアリングセンサの検出値に従った制御を行うように構成されても良い。また、ステアリングシステム4は、高度運転システム1が作動中の状態において、高度運転システム1から出力される操舵指令値に従って、運転者の操舵操作をアシストするためのトルクを発生させる操舵アシスト制御を行うように構成されても良い。
ABS5は、自車両100の減速時に車輪のロックによる滑走の発生を低減する周知のシステムである。ABS5は、例えば車速センサの検出結果に基づいて、車輪の回転が所定の減速度を超えたと判断した場合に、ブレーキシステム3を制御する。また、ABS5は、このようなブレーキシステム3の制御の開始時と終了時にそれぞれのタイミングを示す情報を高度運転システム1に出力するように構成されている。
なお、このような車両100の車輪の滑りを防止するための制御システムとしては、ABS5のほか、非図示のトラクションコントロールシステム(以下、TCS)が搭載されている。TCSは、車輪と路面との接地状態を監視し、例えば車両100の発進時や加速時に駆動輪の空転を検出すると、ブレーキシステム3やパワートレインシステム2を制御することで、車両100の横滑りを抑制する周知のシステムである。TCSについても、このようなブレーキシステム3やパワートレインシステム2の制御の開始時と終了時にそれぞれのタイミングを示す情報を高度運転システム1に出力するように構成されている。
高度運転システム1は、加減速制御ユニット10、操舵制御ユニット15及びヒューマンマシンインターフェース制御ユニット16(以下、HMI制御ユニット16)を備えている。これらの各制御ユニット10、15、16は、CPU13と、RAM、ROM及びフラッシュメモリ等の半導体メモリ(以下、メモリ14)と、を有する周知のマイクロコンピュータを中心に構成される。各制御ユニット10、15、16の各種機能は、CPU13が非遷移的実体的記録媒体に格納されたプログラムを実行することにより実現される。この例では、メモリ14が、プログラムを格納した非遷移的実体的記録媒体に該当する。また、このプログラムが実行されることで、プログラムに対応する方法が実行される。なお、各制御ユニット10、15、16を構成するマイクロコンピュータの数は1つでも複数でも良い。また、1つのマイクロコンピュータによって複数の制御ユニット10、15、16が構成されても良い。
HMI制御ユニット16は、加減速制御ユニット10や操舵制御ユニット15からの入力に基づき、室内ディスプレイ9やスピーカ11を介して必要な情報を運転者に報知するための制御を行うユニットである。
操舵制御ユニット15は、目標ヨーレートや目標操舵角を設定し、ステアリングシステム4の制御に必要な操舵指令値を生成して出力するユニットである。操舵制御ユニット15は、カーブ走行やレーンチェンジに必要な操舵操作をアシストする運転支援、あるいは運転者の操作を必要としない自動操舵、を実現するために、操舵指令値を生成して出力する。
[1-2.加減速制御ユニット10の構成]
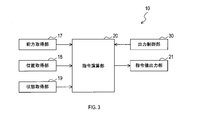
加減速制御ユニット10は、CPU13がプログラムを実行することで実現される機能の構成として、図3に示すように、前方取得部17、位置取得部18、状態取得部19、指令演算部20、指令値出力部21及び出力制御部30を備える。加減速制御ユニット10を構成するこれらの要素を実現する手法はソフトウェアに限るものではなく、その一部又は全部の要素について、一つあるいは複数のハードウェアを用いて実現してもよい。例えば、上記機能がハードウェアである電子回路によって実現される場合、その電子回路は多数の論理回路を含むデジタル回路、又はアナログ回路、あるいはこれらの組合せによって実現してもよい。
加減速制御ユニット10は、CPU13がプログラムを実行することで実現される機能の構成として、図3に示すように、前方取得部17、位置取得部18、状態取得部19、指令演算部20、指令値出力部21及び出力制御部30を備える。加減速制御ユニット10を構成するこれらの要素を実現する手法はソフトウェアに限るものではなく、その一部又は全部の要素について、一つあるいは複数のハードウェアを用いて実現してもよい。例えば、上記機能がハードウェアである電子回路によって実現される場合、その電子回路は多数の論理回路を含むデジタル回路、又はアナログ回路、あるいはこれらの組合せによって実現してもよい。
前方取得部17は、自車両前方の道路形状を取得するように構成される。具体的には、前方取得部17は、位置取得部18により取得された車両100の現在位置と、高度地図情報記憶部7から出力される車両100の現在位置周辺の道路情報とに基づいて、自車両前方の道路勾配および道路の曲率半径を含む道路形状を取得する。また、前方取得部17は、画像センサにより撮像される自車両前方の路面を含む画像に基づいて、自車両前方の道路形状を補正するように構成されても良い。なお、本実施形態において、前方取得部17は、自車両前方の道路形状を取得するほか、画像センサから自車両前方の道路に関する路面状態を取得し、通信装置から自車両周辺の天候を示す情報を取得する。
位置取得部18は、自車両の現在位置を取得するように構成される。具体的には、位置取得部18は、ロケータ6から出力される位置情報が示す現在位置を、センサ8の検出結果を用いて補正することにより、車両100の現在位置を取得する。
状態取得部19は、自車両の走行状態を取得するように構成される。具体的には、状態取得部19は、センサ8から出力される情報を基に、車両100の走行状態として、主に、車両100の現在速度、現在加速度Gx,Gy,Gz、操舵角およびヨーレート等を取得する。なお、現在加速度Gx,Gy,Gzは、正の値である場合に車両100の加速を表し、負の値である場合に車両100の減速を表す。また、状態取得部19は、現在加速度Gx,Gy,Gzに関する前回値と今回値とに基づいて、単位時間あたりの加速度の変化率を示す加加速度ΔGx,ΔGy,ΔGzを算出する。
指令値出力部21は、自車両に発生させる前後方向の駆動指令値をパワートレインシステム2及びブレーキシステム3に出力するように構成される。駆動指令値は、車両100の駆動力または制動力を示す物理量であり、後述するように指令演算部20により演算される。
[1-3.指令演算部20の構成]
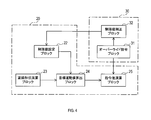
指令演算部20は、図4に示すように、制限値設定ブロック22、道路形状演算ブロック23、目標運動値算出ブロック24及び指令値演算ブロック25を備える。
指令演算部20は、図4に示すように、制限値設定ブロック22、道路形状演算ブロック23、目標運動値算出ブロック24及び指令値演算ブロック25を備える。
制限値設定ブロック22は、自車両の速度、加速度及び加加速度のうち少なくとも一つの値を制限する値(以下、制限値)を設定するように構成される。なお、これらの制限値のうち、ユーザにより予め入力された値(以下、ユーザ設定値)は、メモリ14に格納されている。例えば、制限値設定ブロック22は、速度に関する制限値(以下、速度制限値)として、ユーザ設定値、又は自車両が走行中の道路に係る法定速度のいずれか一方を選択し、選択された速度制限値をVlimとして目標運動値算出ブロック24に出力する。具体的には、制限値設定ブロック22は、ユーザ設定値および法定速度のうち小さい方の速度制限値をVlimとして出力する。なお、法定速度は、高度地図情報記憶部7から読み出される。
また、制限値設定ブロック22は、加速度に関する制限値(以下、加速制限値)、及び、加加速度に関する制限値(以下、加加速制限値)のうち、少なくとも一方の制限値を目標運動値算出ブロック24に出力するように構成される。具体的には、制限値設定ブロック22は、ユーザ設定値として予め入力された加速制限値または加加速制限値を、速度制限値Vlimとともに、目標運動値算出ブロック24に出力する。なお、加速制限値および加加速制限値は、絶対値で表される値であり、x軸,y軸,z軸の各軸について予め設定されている。なお、以下では、加速制限値のうち、自車両の上下方向の加速度を制限する加速制限値をGzmax、自車両の横方向の加速度を制限する加速制限値をGymax、自車両の前後方向の加速度を制限する加速制限値をGxmaxとする。また、加加速制限値のうち、自車両の上下方向の加加速度を制限する加加速制限値をΔGzmax、自車両の横方向の加加速度を制限する加加速制限値をΔGymax、自車両の前後方向の加加速度を制限する加加速制限値をΔGxmaxとする。
道路形状演算ブロック23は、自車両前方の道路形状に係る演算を行うように構成される。具体的には、道路形状演算ブロック23は、前方取得部17により取得された自車両前方の道路形状に基づき、自車両前方の各ノードにおける道路勾配の変化量を算出するように構成される。なお、ノードにおける道路勾配の変化量は、当該ノードに接続された2つのリンクがそれぞれ示す道路勾配の差分によって表される。
目標運動値算出ブロック24は、自車両の目標運動値を算出するように構成される。具体的には、目標運動値算出ブロック24は、自車両前方の道路形状および自車両の現在位置に基づいて、自車両前方の道路上の各地点における目標速度および目標加速度のうち少なくとも一つの値を、目標運動値として算出する。本実施形態では、目標運動値算出ブロック24は、自車両前方の各ノードにおける目標速度を算出し、算出された目標速度を指令値演算ブロック25に出力するように構成される。
指令値演算ブロック25は、駆動指令値を演算するように構成される。具体的には、指令値演算ブロック25は、目標運動値算出ブロック24により算出された目標速度と、自車両の現在速度とに基づいて、自車両前方の各ノードにおける目標加速度を算出する。そして、指令値演算ブロック25は、算出した目標加速度に基づいて、自車両に発生させる前後方向の駆動指令値を演算する。なお、目標加速度は、正の値である場合に車両100の加速を表し、負の値である場合に車両100の減速を表す。また、指令値演算ブロック25は、演算した駆動指令値を、指令値出力部21を介して、パワートレインシステム2及びブレーキシステム3に出力するように構成される。
[1-4.出力制御部30の構成]
出力制御部30は、オーバーライド指令ブロック31及び制限値補正ブロック32を備える。
出力制御部30は、オーバーライド指令ブロック31及び制限値補正ブロック32を備える。
オーバーライド指令ブロック31は、自車両の運転者の操作および自車両における他の制御システムのうちの少なくとも一方による入力に基づいて、指令値出力部21による駆動指令値の出力を制御するように構成される。具体的には、オーバーライド指令ブロック31は、センサ8による検出結果に基づき、運転者の操作として、アクセルペダル、ブレーキペダル及びシフトレバーのうちいずれか一つの操作を検出する。そして、オーバーライド指令ブロック31は、例えば、アクセルペダルやブレーキペダルが所定量以上踏み込まれたと判断した場合に、指令値演算ブロック25にスイッチング信号「0」を出力する。また例えば、オーバーライド指令ブロック31は、トランスミッションのギアに係るシフトダウンやシフトアップがなされたと判断した場合に、指令値演算ブロック25にスイッチング信号「0」を出力する。
また、オーバーライド指令ブロック31は、他の制御システムとして、ABS5又はTSCから制御の開始に係るタイミング情報を入力すると、指令値演算ブロック25にスイッチング信号「0」を出力する。このようにスイッチング信号「0」が出力されると、指令値演算ブロック25による駆動指令値の演算が停止し、その結果、指令値出力部21による駆動指令値の出力が停止されることにより、高度運転システム1の作動が解除される。つまり、運転の権限が高度運転システム1から運転者や他の制御システムに委譲される。
逆に、オーバーライド指令ブロック31は、アクセルペダル、ブレーキペダル及びシフトレバーの全ての操作がなされていないことを検出した時、又は、ABS5若しくはTSCから制御の終了に係るタイミング情報を入力した時、指令値演算ブロック25にスイッチング信号「1」を出力する。このようにスイッチング信号「1」が出力されると、指令値演算ブロック25による駆動指令値の演算が再開され、その結果、指令値出力部21による駆動指令値の出力が再開されることにより、高度運転システム1の作動が復帰する。つまり、運転の権限が運転者や他の制御システムから高度運転システム1に委譲される。
制限値補正ブロック32は、オーバーライド指令ブロック31による駆動指令値の出力制御により、駆動指令値の出力を停止させた後に再開させる際に、制限値設定ブロック22から出力される加速制限値または加加速制限値を一時的に小さくするように構成される。具体的には、制限値補正ブロック32は、制限値設定ブロック22が加速制限値を出力するように構成されている場合は加速制限値を一時的に小さくする。また、制限値補正ブロック32は、制限値設定ブロック22が加加速制限値を出力するように構成されている場合は加加速制限値を一時的に小さくする。なお、本明細書において「値を小さくする」とは、「絶対値を小さくする」意味である。
例えば、前者の場合、制限値補正ブロック32は、高度運転システム1の作動復帰時に、図5に示すように、加速制限値を一時的に小さくする。その後、制限値補正ブロック32は、小さくする前の加速制限値である基準値まで徐々に加速制限値を増加させるための指令を制限値設定ブロック22に出力する。なお、この場合、加速制限値の増加率は、線形であっても良いし、非線形であっても良い。
また例えば、後者の場合、制限値補正ブロック32は、高度運転システム1の作動復帰時に、図6に示すように、加加速制限値を一時的に小さくする。所定期間経過後に、制限値補正ブロック32は、小さくする前の加加速制限値である基準値に加加速制限値を戻すための指令を制限値設定ブロック22に出力する。
なお、図5において、Gmaxは、Gzmax、Gymax及びGxmaxのうちの少なくとも一つの加速制限値を示す。また、図6において、ΔGmaxは、ΔGzmax、ΔGymax及びΔGxmaxのうちの少なくとも一つの加加速制限値を示す。つまり、制限値補正ブロック32は、高度運転システム1の作動復帰時に、Gzmax、Gymax及びGxmaxのうちの少なくとも一つの加速制限値、又は、ΔGzmax、ΔGymax及びΔGxmaxのうちの少なくとも一つの加加速制限値を可変設定させる。本実施形態では、制限値補正ブロック32は、高度運転システム1の作動復帰時に、Gxmax又はΔGxmaxを可変設定するように構成される。具体的には、制限値補正ブロック32は、制限値設定ブロック22が加速制限値を出力するように構成されている場合はGxmaxを可変設定する。また、制限値補正ブロック32は、制限値設定ブロック22が加加速制限値を出力するように構成されている場合はΔGxmaxを可変設定する。
[1-5.目標運動値算出処理]
次に、目標運動値算出ブロック24が実行する処理(以下、目標運動値算出処理)について、図7のフローチャートを用いて説明する。なお、目標運動値算出処理は、自車両前方の各ノードにおける目標速度を算出する処理である。この処理では、車両100の現在位置に近いノードから道路形状に沿って順に対象となるノードを抽出し、抽出した各ノード(以下、対象ノード)における目標速度を算出する。また、目標運動値算出処理は、高度運転システム1が作動中の状態において繰り返し実行される。
次に、目標運動値算出ブロック24が実行する処理(以下、目標運動値算出処理)について、図7のフローチャートを用いて説明する。なお、目標運動値算出処理は、自車両前方の各ノードにおける目標速度を算出する処理である。この処理では、車両100の現在位置に近いノードから道路形状に沿って順に対象となるノードを抽出し、抽出した各ノード(以下、対象ノード)における目標速度を算出する。また、目標運動値算出処理は、高度運転システム1が作動中の状態において繰り返し実行される。
本処理が開始されると、目標運動値算出ブロック24は、制限値設定ブロック22が加加速制限値を出力するように構成されている場合、まずステップ(以下、S)110において制限値設定ブロック22から、加加速制限値としてΔGzmax、ΔGymax及びΔGxmaxを取得する。
次にS120において、目標運動値算出ブロック24は、現在加速度Gz,Gy,Gxに、S110で取得されたΔGzmax、ΔGymax及びΔGxmaxをそれぞれ乗じることにより、加速制限値としてGzmax、Gymax及びGxmaxを取得する。また、目標運動値算出ブロック24は、前回抽出された対象ノードに係る加速制限値が存在する場合は、この加速制限値にS110で取得された加加速制限値を乗じることにより、今回抽出された対象ノードに係る加速制限値を取得する。なお、この計算は、制限値設定ブロック22が加速制限値を出力するように構成されている場合、不要となる。この場合、目標運動値算出ブロック24は、制限値設定ブロック22から、加速制限値としてGzmax、Gymax及びGxmaxを取得することができる。
続くS130において、目標運動値算出ブロック24は、道路形状演算ブロック23により算出された対象ノードにおける道路の曲率半径、道路勾配の変化量、及び、ノード間距離を取得する。なお、対象ノードにおける道路の曲率半径は、その対象ノードに接続された2つのリンクのうちのいずれか一方に係る情報から取得される。また、ノード間距離は、前回抽出された対象ノードと今回抽出された対象ノードとの距離(即ち、リンク長)である。
続くS140において、目標運動値算出ブロック24は、S120で取得されたGymaxと、S130で取得された対象ノードにおける道路の曲率半径に基づいて、自車両の目標速度を制限するための速度制限値を算出することができる。なお、ここで算出される速度制限値をVymaxとする。
具体的には、Vymaxは、以下のように算出される。なお、車両100は、図8に示すように、x-y平面内において定常円旋回を行うものと仮定する。また、図8に示す曲線は、自車両前方においてカーブした道路形状を表す。また、図8に示す曲線上の各点は、自車両前方における各ノードを表す。
すなわち、車両100に加わる遠心力の定義よる次式(1)の不等式を満たす車速Vのうち、その最大値を次式(2)のようにVymaxとして算出する。なお、式(1)及び式(2)において、Mは車両100の重量、Rは道路の曲率半径をそれぞれ表す。


このように、Vymaxは、式(2)にしたがって、Gymaxと道路の曲率半径とに基づいて算出することができる。一方で、Vymaxは、道路の曲率半径の代わりに、ノードの座標情報を用いて算出することもできる。
すなわち、車両100がノード間を移動する時間であるΔt秒間に、前回抽出された対象ノードにおける車両100の向きを角度で示したθn-1から、今回抽出されたノードにおける車両100の向きを角度で示したθnまで車両100の向きが変化した場合を仮定する。この場合、車両100のヨーレートγは、次式(3)で表される。なお、式(3)において、Δθnは、車両100の向きの変化量を表す。

ここで、定常円旋回において、1周が2πであり、車両100が1周するのにかかる時間が2πR/Vであるとの仮定から、次式(4)が成り立つ。

また、x-y平面におけるノード間距離をΔLとすると、次式(5)が成り立つ。

式(3)、式(4)及び式(5)より、次式(6)が得られる。

また、式(6)を式(1)に代入することにより、次式(7)が得られる。

このように、Vymaxは、式(7)に示すように、Gymaxと、車両100の向きの変化量と、ノード間距離とに基づいて算出することができる。なお、車両100の向きの変化量は、各ノードの座標から求めることができる。
図7に戻り、目標運動値算出ブロック24は、続くS150において、S120で取得されたGzmaxと、S130で取得された対象ノードにおける道路勾配の変化量とを用いて、自車両の目標速度を制限するための速度制限値を算出する。なお、ここで算出される速度制限値をVzmaxとする。
具体的には、Vzmaxは、次式(8)のように算出される。なお、式(8)において、ΔLzはx-z平面におけるノード間距離、Δθnは道路勾配の変化量をそれぞれ表す。

すなわち、図8に示すx-y平面をx-z平面に置き換え、車両100の向きの変化量を道路勾配の変化量と見立てる。これにより、Vzmaxは、式(8)に示すように、Gzmaxと、道路勾配の変化量と、x-z平面におけるノード間距離とに基づいて算出することができる。
次に、目標運動値算出ブロック24は、S160において、制限値設定ブロック22により選択されたVlimを取得する。
そして、目標運動値算出ブロック24は、S170において、S140で算出されたVymax、S150で算出されたVzmax、及びS160で取得されたVlimのうち、最も小さい値を選択する。なお、ここで選択された速度制限値をVmaxとする。
そして、目標運動値算出ブロック24は、S170において、S140で算出されたVymax、S150で算出されたVzmax、及びS160で取得されたVlimのうち、最も小さい値を選択する。なお、ここで選択された速度制限値をVmaxとする。
最後に、目標運動値算出ブロック24は、S180において、S170で選択された速度制限値であるVmaxと、S120で取得された加速制限値のうちのGxmaxと、を制約条件として満たす目標速度を演算し、本処理を終了する。具体的には、目標運動値算出ブロック24は、今回抽出された対象ノードにおいて、速度がVmax以下となり、かつ、前回抽出された対象ノードにおける速度に対する変化率がGxmax以下となる範囲において、最大となる速度を算出する。これにより、目標運動値算出ブロック24は、最適化された目標速度を求める。
[1-6.制限値設定処理]
次に、制限値設定ブロック22が実行する処理(以下、制限値設定処理)について、図9のフローチャートを用いて説明する。なお、制限値設定処理は、高度運転システム1が作動中の状態において繰り返し実行される。
次に、制限値設定ブロック22が実行する処理(以下、制限値設定処理)について、図9のフローチャートを用いて説明する。なお、制限値設定処理は、高度運転システム1が作動中の状態において繰り返し実行される。
本処理が開始されると、制限値設定ブロック22は、まずS210において、前方取得部17から自車両前方の道路に関する路面状態と、自車両周辺の天候を示す情報を取得する。そして、制限値設定ブロック22は、続くS220において、ユーザ設定値として格納されている制限値をメモリ14から読み出す。なお、ここでメモリ14から読み出される制限値には、加速制限値、加加速制限値および速度制限値が含まれる。
続くS230において制限値設定ブロック22は、S210で取得された路面状態および天候を示す情報のうち少なくとも一方の情報に基づいて、S220で読み出された制限値を補正する処理(以下、制限値補正処理)を実施する。例えば、制限値補正処理では、路面がウエットな状態である場合や積雪路面、凍結路面である場合、あるいは天候が雨や雪である場合に、加速制限値、加加速制限値および速度制限値のうち少なくとも一つの制限値を小さくする。なお、このように補正された制限値は、制限値設定ブロック22から目標運動値算出ブロック24に出力される制限値として用いられる。
続くS240において制限値設定ブロック22は、制限値補正ブロック32からの指令の有無を判断し、制限値補正ブロック32からの指令がないと判断した場合は、本処理を終了する。一方、制限値設定ブロック22は、制限値補正ブロック32からの指令があると判断した場合は、続くS250において、その指令にしたがって、制限値変更処理を実施し、本処理を終了する。制限値変更処理は、加速制限値または加加速制限値を一時的に小さくし、その後、小さくする前の基準値まで加速制限値または加加速制限値を徐々に増加させるように、目標運動値算出ブロック24に出力する制限値を可変設定する処理である。
[1-7.効果]
以上詳述した第1実施形態によれば、以下の効果を奏する。
(1a)指令演算部20による駆動指令値の調整にGzmaxと道路勾配の変化量とが用いられる。このため、道路勾配が変化したときに自車両の上下方向における過度な加減速力が自車両にかかりにくくなるので、走行中に過度な浮遊感等の違和感を乗員に与えにくくすることができる。
以上詳述した第1実施形態によれば、以下の効果を奏する。
(1a)指令演算部20による駆動指令値の調整にGzmaxと道路勾配の変化量とが用いられる。このため、道路勾配が変化したときに自車両の上下方向における過度な加減速力が自車両にかかりにくくなるので、走行中に過度な浮遊感等の違和感を乗員に与えにくくすることができる。
(1b)指令演算部20による駆動指令値の調整に、Gzmaxと道路勾配の変化量とを用いて算出されたVzmaxが用いられることにより、自車両の上下方向における過度な加減速力がかからないような車速を好適に得ることができるようになる。
(1c)指令演算部20による駆動指令値の調整に、Vzmax及びVymaxのうち小さい方の速度制限値が用いられるため、さらに、自車両の横方向における過度な遠心力がかからないような車速を好適に得ることができるようになる。
(1d)指令演算部20による駆動指令値の調整に、Vzmax、Vymax及びVlimのうち最も小さい値が用いられるため、さらに、ユーザ設定値または法定速度を超えないような車速を好適に得ることができるようになる。
(1e)指令演算部20による目標速度の算出に、Gxmax及び速度制限値が用いられるため、さらに、自車両の前後方向における過度な加減速力がかからないような車速を好適に得ることができるようになる。
(1f)天候および路面状態のうち少なくとも一方を示す情報に基づいて、指令演算部20により加速制限値が設定される。このため、例えば自車両が滑りやすいような路面に対し、加速制限値を小さくすることにより、自車両の挙動をより安定させることができるようになる。
(1A)高度運転システム1では、出力制御部30によって駆動指令値の出力を停止させた後に再開させる際に、加速制限値または加加速制限値を一時的に小さくするようにしている。このため、自車両の加減速制御が一時的に解除された後に復帰するに際して、駆動指令値を小さくし過ぎることなく、運転者になるべく違和感を与えないようにすることができ、より効率的な加減速制御を実現することができるようになる。
(1B)また、出力制御部30によって加速制限値が一時的に小さくされた後には、小さくされる前の基準値まで加速制限値を徐々に増加させるようにしている。このため、なるべく運転者に違和感を与えないように、緩やかに通常の高度運転システム1の作動へと復帰させることができる。
(1C)高度運転システム1では、出力制御部30によって駆動指令値の出力を停止させた後に再開させる際に、Gxmax、Gymax及びGzmaxのうち少なくとも一つの値を一時的に小さくするようにしている。これにより、加速制限値の計算をせずに済むため、より効率的な加減速制御を実現することができる。
(1D)出力制御部30は、運転者の操作として、アクセル操作、ブレーキ操作およびシフト操作のうちの少なくとも一つの操作による入力に基づいて、駆動指令値の出力を停止させるようにしている。このため、例えば、自車両を加減速させようとして運転者がアクセルペダルやブレーキペダルの踏み込み、又はシフトダウンやシフトアップの操作を行うことによって、高度運転システム1を好適に解除することができる。また、高度運転システム1が復帰する際には、自車両の加減速に関する制限が強化されるので、運転者の感覚に沿わないような強い加減速の発生を抑制することができる。
(1E)出力制御部30は、他の制御システムとして、自車両の車輪の滑りを防止する制御システムによる入力に基づいて、駆動指令値の出力を停止させるようにしている。このため、例えば、ABS5やTCSの作動によって高度運転システム1を好適に解除することができる。また、高度運転システム1が復帰する際には、自車両の加減速に関する制限が強化されるため、自車両の挙動がより安定しやすくなるので、ABS5やTCS等の再作動を抑制することができる。
[2.第2実施形態]
[2-1.第1実施形態との相違点]
第2実施形態は、基本的な構成は第1実施形態と同様であるため、相違点について以下に説明する。なお、第1実施形態と同じ符号は、同一の構成を示すものであって、先行する説明を参照する。
[2-1.第1実施形態との相違点]
第2実施形態は、基本的な構成は第1実施形態と同様であるため、相違点について以下に説明する。なお、第1実施形態と同じ符号は、同一の構成を示すものであって、先行する説明を参照する。
前述した第1実施形態では、制限値補正ブロック32は、加速制限値または加加速制限値を一時的に小さくするための指令を制限値設定ブロック22に出力するようにしていた。これに対し、第2実施形態では、図10に示すように、制限値補正ブロック32は、駆動指令値を一時的に小さくするための指令を指令値演算ブロック25に出力する点で、第1実施形態と相違する。
具体的には、制限値補正ブロック32は、オーバーライド指令ブロック31による駆動指令値の出力制御により、駆動指令値の出力を停止させた後に再開させる際に、指令値演算ブロック25から出力される駆動指令値を一時的に小さくするように構成される。
詳細には、制限値補正ブロック32は、このような高度運転システム1の作動復帰時に、指令値演算ブロック25から出力される駆動指令値に乗じる係数を0~1の範囲内で可変設定する。これにより、制限値補正ブロック32は、駆動指令値を一時的に小さくし、その後、例えば小さくする前の駆動指令値まで徐々に増加させるようにすることができる。つまり、制限値補正ブロック32は、図11に示すように、高度運転システム1の作動復帰時に、駆動指令値に乗じる調整値(つまり、係数)を一時的に小さくする。そして、制限値補正ブロック32は、所定期間経過後、高度運転システム1の作動停止前の係数である基準値(即ち、「1」の値)まで係数を徐々に増加させるように構成される。
なお、制限値補正ブロック32は、指令値演算ブロック25により算出される目標加速度に乗じる係数を可変設定することにより、駆動指令値を一時的に小さくするように構成されても良い。
[2-2.効果]
以上詳述した第2実施形態によれば、前述した第1実施形態の効果(1a)~(1f)及び(1D)並びに(1E)を奏し、さらに、以下の効果を奏する。
以上詳述した第2実施形態によれば、前述した第1実施形態の効果(1a)~(1f)及び(1D)並びに(1E)を奏し、さらに、以下の効果を奏する。
(2A)高度運転システム1では、出力制御部30によって駆動指令値の出力を停止させた後に再開させる際に、駆動指令値を一時的に小さくするようにしているため、より確実に自車両の挙動を安定させることができる。よって、自車両の加減速制御が一時的に解除された後に復帰するに際して、違和感を運転者に与えないようにする確実性を向上させることができる。
(2B)また、高度運転システム1では、出力制御部30によって駆動指令値に乗じる係数が一時的に小さくされた後には、小さくされる前の基準値まで係数を徐々に増加させるようにしている。このため、なるべく違和感を運転者に与えないように、緩やかに通常の高度運転システム1の作動へと復帰させることができる。
[3.他の実施形態]
以上、本開示の実施形態について説明したが、本開示は上述の実施形態に限定されることなく、種々変形して実施することができる。
以上、本開示の実施形態について説明したが、本開示は上述の実施形態に限定されることなく、種々変形して実施することができる。
(3a)上記実施形態では、目標運動値算出ブロック24が目標速度を算出し、指令値演算ブロック25が目標速度に基づいて目標加速度を算出するようにしていたが、目標加速度を算出する構成はこれに限定されるものではない。例えば、目標運動値算出ブロック24が目標速度と目標加速度の両方を算出し、指令値演算ブロック25が目標加速度に基づいて駆動指令値を算出するようにしても良い。
(3b)上記実施形態における1つの構成要素が有する複数の機能を、複数の構成要素によって実現したり、1つの構成要素が有する1つの機能を、複数の構成要素によって実現したりしてもよい。また、複数の構成要素が有する複数の機能を、1つの構成要素によって実現したり、複数の構成要素によって実現される1つの機能を、1つの構成要素によって実現したりしてもよい。また、上記実施形態の構成の一部を省略してもよい。また、上記実施形態の構成の少なくとも一部を、他の上記実施形態の構成に対して付加又は置換してもよい。なお、請求の範囲に記載した文言から特定される技術思想に含まれるあらゆる態様が本開示の一態様に関する実施形態である。
(3c)上述した高度運転システム1の他、当該高度運転システム1を構成要素とする車載システム、当該高度運転システム1を構成する加減速制御ユニット10、当該高度運転システム1、当該車載システム又は当該加減速制御ユニット10としてコンピュータを機能させるためのプログラム、このプログラムを記録した半導体メモリ等の非遷移的実態的記録媒体、運転支援方法、加減速制御方法など、種々の形態で本開示の一態様を実現することもできる。
Claims (6)
- 自車両の加減速を制御する加減速制御システムにおいて、
自車両前方の道路形状および自車両の現在位置に基づいて、自車両前方の道路上の各地点における目標速度を算出し、前記目標速度および自車両の現在速度に基づいて、自車両に発生させる前後方向の駆動指令値を演算する際に、自車両の加速度を制限する加速制限値、又は自車両の加加速度を制限する加加速制限値を用いて前記駆動指令値を調整するように構成された指令演算部(20)と、
自車両の運転者の操作および自車両における他の制御システムのうちの少なくとも一方による入力に基づいて、前記駆動指令値の出力を制御するように構成された出力制御部(30)と、
を備え、
前記出力制御部は、前記駆動指令値の出力を停止させた後に再開させる際に、前記加速制限値、前記加加速制限値および前記駆動指令値のうちの少なくとも一つの値を一時的に小さくするように構成された、加減速制御システム。 - 請求項1に記載の加減速制御システムにおいて、
前記出力制御部は、前記駆動指令値の出力を停止させた後に再開させる際に、前記加速制限値、又は、前記駆動指令値に乗じる調整値を一時的に小さくし、その後、小さくする前の前記加速制限値、又は、前記駆動指令値に乗じる調整値まで徐々に増加させるように構成された、加減速制御システム。 - 請求項1又は請求項2に記載の加減速制御システムにおいて、
前記出力制御部は、前記駆動指令値の出力を停止させた後に再開させる際に、Gxmax、Gymax及びGzmaxのうちの少なくとも一つの値を一時的に小さくするように構成され、
前記Gxmaxは、自車両の前後方向の加速度を制限する前記加速制限値であり、
前記Gymaxは、自車両の横方向の加速度を制限する前記加速制限値であり、
前記Gzmaxは、自車両の上下方向の加速度を制限する前記加速制限値である、加減速制御システム。 - 請求項1から請求項3までのいずれか1項に記載の加減速制御システムにおいて、
前記出力制御部は、前記運転者の操作として、アクセル操作、ブレーキ操作およびシフト操作のうちの少なくとも一つの操作による入力に基づいて、前記駆動指令値の出力を停止させるように構成された、加減速制御システム。 - 請求項1から請求項4までのいずれか1項に記載の加減速制御システムにおいて、
前記出力制御部は、前記他の制御システムとして、自車両の車輪の滑りを防止する制御システムによる入力に基づいて、前記駆動指令値の出力を停止させるように構成された、加減速制御システム。 - 自車両の加減速を制御する加減速制御方法において、
自車両前方の道路形状および自車両の現在位置に基づいて、自車両前方の道路上の各地点における目標速度を算出し、前記目標速度および自車両の現在速度に基づいて、自車両に発生させる前後方向の駆動指令値を演算する際に、自車両の加速度を制限する加速制限値、又は自車両の加加速度を制限する加加速制限値を用いて前記駆動指令値を調整し、
自車両の運転者の操作および自車両における他の制御システムのうちの少なくとも一方による入力に基づいて、前記駆動指令値の出力を制御することにより、前記駆動指令値の出力を停止させた後に再開させる際に、前記加速制限値、前記加加速制限値および前記駆動指令値のうちの少なくとも一つの値を一時的に小さくする、
加減速制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/330,933 US20190232970A1 (en) | 2016-09-08 | 2017-09-06 | Acceleration and deceleration control system and acceleration and deceleration control method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016175525A JP6597528B2 (ja) | 2016-09-08 | 2016-09-08 | 加減速制御システム、加減速制御方法 |
| JP2016-175525 | 2016-09-08 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018047874A1 true WO2018047874A1 (ja) | 2018-03-15 |
Family
ID=61562142
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/032158 WO2018047874A1 (ja) | 2016-09-08 | 2017-09-06 | 加減速制御システム、加減速制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20190232970A1 (ja) |
| JP (1) | JP6597528B2 (ja) |
| WO (1) | WO2018047874A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3770034A1 (fr) * | 2019-07-25 | 2021-01-27 | Renault S.A.S. | Procédé de pilotage d'un véhicule automobile |
| CN113544033A (zh) * | 2019-02-28 | 2021-10-22 | 标致雪铁龙汽车股份有限公司 | 在弯道中超车时的车辆速度调节 |
| CN114789714A (zh) * | 2021-01-08 | 2022-07-26 | 丰田自动车株式会社 | 车辆控制装置 |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112601685A (zh) | 2018-07-06 | 2021-04-02 | 伊戈尔航空有限公司 | 自适应制动和方向控制系统(abadcs) |
| FR3088590B1 (fr) * | 2018-11-16 | 2020-10-23 | Psa Automobiles Sa | Regulation de la vitesse d’un vehicule, avec prise en compte de la volonte du conducteur dans un virage |
| CN111267853B (zh) * | 2018-12-03 | 2021-06-18 | 广州汽车集团股份有限公司 | 一种自适应车辆弯道辅助控制方法、装置、计算机设备和存储介质 |
| WO2021089134A1 (en) * | 2019-11-06 | 2021-05-14 | Volvo Truck Corporation | A control device and a method for controlling vehicle speed |
| US11352004B2 (en) * | 2019-12-04 | 2022-06-07 | Hyundai Motor Company | Vehicle travel control system and control method therefor |
| KR20210071616A (ko) * | 2019-12-06 | 2021-06-16 | 현대자동차주식회사 | 에어백 제어 장치 및 방법 |
| JP7368206B2 (ja) * | 2019-12-09 | 2023-10-24 | トヨタ自動車株式会社 | 制御装置 |
| IT202000000976A1 (it) * | 2020-01-20 | 2021-07-20 | Iveco France Sas | Sistema e metodo per la regolazione dello strattone in un veicolo autonomo |
| JP7264086B2 (ja) * | 2020-02-27 | 2023-04-25 | トヨタ自動車株式会社 | 車両制御装置及び車両制御方法 |
| JP7302545B2 (ja) * | 2020-08-03 | 2023-07-04 | トヨタ自動車株式会社 | 運転支援装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006347528A (ja) * | 2005-05-16 | 2006-12-28 | Xanavi Informatics Corp | 自動車の走行制御装置及び方法 |
| JP2009051487A (ja) * | 2007-07-31 | 2009-03-12 | Nissan Motor Co Ltd | 車両用走行制御装置および車両用走行制御方法 |
| JP2012051441A (ja) * | 2010-08-31 | 2012-03-15 | Toyota Motor Corp | 自動運転車両制御装置 |
| JP2015058890A (ja) * | 2013-09-20 | 2015-03-30 | 株式会社デンソー | 走行軌道生成装置、および走行軌道生成プログラム |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5417386B2 (ja) * | 2011-07-01 | 2014-02-12 | 日立オートモティブシステムズ株式会社 | 車両運動制御装置 |
-
2016
- 2016-09-08 JP JP2016175525A patent/JP6597528B2/ja active Active
-
2017
- 2017-09-06 US US16/330,933 patent/US20190232970A1/en not_active Abandoned
- 2017-09-06 WO PCT/JP2017/032158 patent/WO2018047874A1/ja active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006347528A (ja) * | 2005-05-16 | 2006-12-28 | Xanavi Informatics Corp | 自動車の走行制御装置及び方法 |
| JP2009051487A (ja) * | 2007-07-31 | 2009-03-12 | Nissan Motor Co Ltd | 車両用走行制御装置および車両用走行制御方法 |
| JP2012051441A (ja) * | 2010-08-31 | 2012-03-15 | Toyota Motor Corp | 自動運転車両制御装置 |
| JP2015058890A (ja) * | 2013-09-20 | 2015-03-30 | 株式会社デンソー | 走行軌道生成装置、および走行軌道生成プログラム |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113544033A (zh) * | 2019-02-28 | 2021-10-22 | 标致雪铁龙汽车股份有限公司 | 在弯道中超车时的车辆速度调节 |
| EP3770034A1 (fr) * | 2019-07-25 | 2021-01-27 | Renault S.A.S. | Procédé de pilotage d'un véhicule automobile |
| FR3099113A1 (fr) * | 2019-07-25 | 2021-01-29 | Renault S.A.S | Procédé de pilotage d’un véhicule automobile |
| CN114789714A (zh) * | 2021-01-08 | 2022-07-26 | 丰田自动车株式会社 | 车辆控制装置 |
| CN114789714B (zh) * | 2021-01-08 | 2024-03-05 | 丰田自动车株式会社 | 车辆控制装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6597528B2 (ja) | 2019-10-30 |
| US20190232970A1 (en) | 2019-08-01 |
| JP2018039401A (ja) | 2018-03-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6597528B2 (ja) | 加減速制御システム、加減速制御方法 | |
| WO2018047873A1 (ja) | 加減速制御システム、加減速制御方法 | |
| JP6322726B2 (ja) | アクセルペダルからの要請により第一の目標速度から第二の目標速度に変更する際の加速のレートを制限する車両速度制御システム及び方法 | |
| JP4497231B2 (ja) | 車両用速度制御装置 | |
| US11383698B2 (en) | Device and method for controlling vehicle movement, and device and method for generating target course | |
| US10550785B2 (en) | Vehicle control device and vehicle control method | |
| US20150336587A1 (en) | Driving assist device | |
| US11731631B2 (en) | Vehicle movement control device, method, program, and system, and target trajectory generating device, method, program, and system | |
| CN107428339B (zh) | 行驶控制装置及行驶控制方法 | |
| JP2006297993A (ja) | 駆動力制御装置 | |
| JP2006300032A (ja) | 車両統合制御装置 | |
| JP6375034B2 (ja) | 車両の運動制御システム | |
| JP5503260B2 (ja) | 車両運動制御装置 | |
| JP2018090064A (ja) | 走行制御装置、車両、走行制御装置の制御方法、プログラム | |
| JP4424387B2 (ja) | 走行制御装置 | |
| JP2019127081A (ja) | 車両の自動運転制御装置及び自動運転制御方法 | |
| EP3321142B1 (en) | Control device for straddled vehicle, and straddled vehicle | |
| JP2020032893A (ja) | 車両運動制御装置 | |
| JP2004322729A (ja) | 走行制御装置 | |
| CN115009277A (zh) | 一种汽车自适应巡航系统下坡控制方法及系统 | |
| JP2014000900A (ja) | 車両制御装置 | |
| US20240270269A1 (en) | Information processing device | |
| JP2019119298A (ja) | 車両用制御装置 | |
| JP4929196B2 (ja) | 車両の運動制御装置 | |
| JP2008267587A (ja) | 車両用制駆動力制御装置および車両用制駆動力制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17848812 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 17848812 Country of ref document: EP Kind code of ref document: A1 |