WO2018008525A1 - 磁気センサ - Google Patents
磁気センサ Download PDFInfo
- Publication number
- WO2018008525A1 WO2018008525A1 PCT/JP2017/023983 JP2017023983W WO2018008525A1 WO 2018008525 A1 WO2018008525 A1 WO 2018008525A1 JP 2017023983 W JP2017023983 W JP 2017023983W WO 2018008525 A1 WO2018008525 A1 WO 2018008525A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- layer
- magnetization
- ferromagnetic layer
- fixed
- ferromagnetic
- Prior art date
Links
- 230000005291 magnetic effect Effects 0.000 title claims abstract description 61
- 230000005294 ferromagnetic effect Effects 0.000 claims abstract description 104
- 230000005415 magnetization Effects 0.000 claims abstract description 85
- 239000000758 substrate Substances 0.000 claims abstract description 25
- 239000010410 layer Substances 0.000 description 225
- 239000010408 film Substances 0.000 description 21
- 239000000463 material Substances 0.000 description 12
- 238000001514 detection method Methods 0.000 description 8
- 230000005293 ferrimagnetic effect Effects 0.000 description 5
- 230000004048 modification Effects 0.000 description 5
- 238000012986 modification Methods 0.000 description 5
- 229910052697 platinum Inorganic materials 0.000 description 5
- 239000010409 thin film Substances 0.000 description 5
- 229910045601 alloy Inorganic materials 0.000 description 4
- 239000000956 alloy Substances 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 229910052763 palladium Inorganic materials 0.000 description 4
- 239000002356 single layer Substances 0.000 description 4
- 239000007787 solid Substances 0.000 description 4
- 230000015572 biosynthetic process Effects 0.000 description 3
- 229910052796 boron Inorganic materials 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 229910000684 Cobalt-chrome Inorganic materials 0.000 description 2
- 239000010952 cobalt-chrome Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 229910052758 niobium Inorganic materials 0.000 description 2
- 229910018979 CoPt Inorganic materials 0.000 description 1
- 229910005335 FePt Inorganic materials 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 229910000808 amorphous metal alloy Inorganic materials 0.000 description 1
- 229910052804 chromium Inorganic materials 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- 229910052741 iridium Inorganic materials 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 229910052749 magnesium Inorganic materials 0.000 description 1
- 229910052748 manganese Inorganic materials 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 239000011241 protective layer Substances 0.000 description 1
- 229910052702 rhenium Inorganic materials 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 229910052715 tantalum Inorganic materials 0.000 description 1
- 230000005641 tunneling Effects 0.000 description 1
- 229910052720 vanadium Inorganic materials 0.000 description 1
- 229910052726 zirconium Inorganic materials 0.000 description 1
Images


Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/09—Magnetoresistive devices
- G01R33/093—Magnetoresistive devices using multilayer structures, e.g. giant magnetoresistance sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B82—NANOTECHNOLOGY
- B82Y—SPECIFIC USES OR APPLICATIONS OF NANOSTRUCTURES; MEASUREMENT OR ANALYSIS OF NANOSTRUCTURES; MANUFACTURE OR TREATMENT OF NANOSTRUCTURES
- B82Y25/00—Nanomagnetism, e.g. magnetoimpedance, anisotropic magnetoresistance, giant magnetoresistance or tunneling magnetoresistance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/0023—Electronic aspects, e.g. circuits for stimulation, evaluation, control; Treating the measured signals; calibration
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/09—Magnetoresistive devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/09—Magnetoresistive devices
- G01R33/091—Constructional adaptation of the sensor to specific applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/09—Magnetoresistive devices
- G01R33/098—Magnetoresistive devices comprising tunnel junctions, e.g. tunnel magnetoresistance sensors
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B5/00—Recording by magnetisation or demagnetisation of a record carrier; Reproducing by magnetic means; Record carriers therefor
- G11B5/127—Structure or manufacture of heads, e.g. inductive
- G11B5/33—Structure or manufacture of flux-sensitive heads, i.e. for reproduction only; Combination of such heads with means for recording or erasing only
- G11B5/39—Structure or manufacture of flux-sensitive heads, i.e. for reproduction only; Combination of such heads with means for recording or erasing only using magneto-resistive devices or effects
- G11B5/3903—Structure or manufacture of flux-sensitive heads, i.e. for reproduction only; Combination of such heads with means for recording or erasing only using magneto-resistive devices or effects using magnetic thin film layers or their effects, the films being part of integrated structures
- G11B5/3906—Details related to the use of magnetic thin film layers or to their effects
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N50/00—Galvanomagnetic devices
- H10N50/10—Magnetoresistive devices
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N50/00—Galvanomagnetic devices
- H10N50/80—Constructional details
- H10N50/85—Magnetic active materials
Definitions
- This disclosure relates to a magnetic sensor.
- a magnetic sensor that detects an external magnetic field using a magnetoresistive element is known (see, for example, Japanese Patent Application Laid-Open No. 2014-157985).
- This type of magnetic sensor includes a fixed layer with a fixed magnetization direction (that is, a pinned layer or a fixed magnetization layer), a free layer whose magnetization direction changes according to an external magnetic field (that is, a magnetization free layer), a fixed layer, And an intermediate layer provided between the layers.
- the present disclosure has been made in view of the above points, and an object thereof is to satisfactorily suppress a decrease in detection accuracy caused by a leakage magnetic field.
- a magnetic sensor includes a substrate having a main surface, a free layer having an easy axis direction in an in-plane direction parallel to the main surface, a fixed layer, the free layer, and the And an intermediate layer provided between the fixed layer.
- the fixed layer includes a first ferromagnetic layer whose magnetization direction is fixed in a first direction non-parallel to the main surface, and a component in a direction parallel to the normal to the main surface is opposite to the first direction.
- a second ferromagnetic layer having a magnetization direction fixed in the second direction, and a nonmagnetic layer provided between the first ferromagnetic layer and the second ferromagnetic layer. is doing.
- the fixed layer includes a first ferromagnetic layer and a second ferromagnetic layer in which components in a direction parallel to the normal in the magnetization direction (that is, perpendicular magnetization direction components) are opposite to each other. It has a so-called laminated ferrimagnetic structure in which the nonmagnetic layer is sandwiched therebetween. Therefore, the leakage of the magnetic field from the fixed layer can be suppressed as much as possible. Therefore, according to the above configuration, it is possible to satisfactorily suppress a decrease in detection accuracy due to the leakage magnetic field.
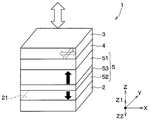
- the magnetic sensor 1 is a so-called magnetoresistive element, and includes a substrate 2, a free layer 3, an intermediate layer 4, and a fixed layer 5.
- the substrate 2 is a thin plate material having a uniform thickness, and is formed using, for example, a silicon wafer.
- the substrate 2 has a main surface 21 that is a flat surface orthogonal to the thickness direction.
- the main surface 21 is provided in parallel with the XY plane in the drawing.
- the Z-axis direction in the drawing is a direction parallel to the normal line of the main surface 21, and this is hereinafter referred to as a “plane perpendicular direction”.
- the direction parallel to the main surface 21 is hereinafter referred to as “in-plane direction”.
- the free layer 3 is formed so as to have an in-plane direction of the easy axis of magnetization, as indicated by broken line arrows in the figure.
- Such an in-plane magnetization free layer 3 can be formed using a known material, for example, an amorphous alloy containing at least one of Fe, Co, and Ni and B. .
- the intermediate layer 4 that is a nonmagnetic layer is provided between the free layer 3 and the fixed layer 5.
- the intermediate layer 4 is provided between the substrate 2 and the free layer 3.
- the intermediate layer 4 can be formed of an insulator such as MgO or AlO, for example.
- the magnetic sensor 1 has a configuration as a tunnel magnetoresistive element.
- the tunnel magnetoresistive element is also called a TMR element.
- TMR is an abbreviation for Tunneling Magneto Resistance.
- the intermediate layer 4 can be formed of a conductor such as Cu or Ag, for example.
- the magnetic sensor 1 has a configuration as a giant magnetoresistive element.
- the giant magnetoresistive element is also called a GMR element.
- GMR is an abbreviation for Giant Magneto Resistance.
- the fixed layer 5 is disposed opposite to the free layer 3 with the intermediate layer 4 interposed therebetween. Specifically, in the present embodiment, the fixed layer 5 is provided between the substrate 2 and the intermediate layer 4. That is, the free layer 3, the intermediate layer 4, the fixed layer 5, and the substrate 2 are laminated in this direction. In the present embodiment, the fixed layer 5 is configured such that the magnetization direction faces the perpendicular direction as a whole. That is, the fixed layer 5 is configured to function as a perpendicular magnetization film in the operation of detecting an external magnetic field. Specifically, the fixed layer 5 includes a first ferromagnetic layer 51, a second ferromagnetic layer 52, and a nonmagnetic layer 53.
- the first ferromagnetic layer 51 is a ferromagnetic film whose magnetization direction is fixed in a direction non-parallel to the main surface 21. Specifically, in the present embodiment, the first ferromagnetic layer 51 has a magnetization direction in the Z1 direction (that is, the Z axis) parallel to the perpendicular direction, as indicated by a solid arrow in the drawing. This is a so-called perpendicular magnetization film that is in the positive direction.
- the first ferromagnetic layer 51 can be formed using, for example, a known thin film exemplified below. Co / Pt multilayer film, Co / Pd multilayer film, thin film obtained by adding Pt, Ta, B, Nb, etc.
- CoCr alloy, Co / (Pt or Pd) multilayer film and Co—Xa / (Pt or Pd) multilayer film layer Xa is a laminated magnetic film with Cr, B, Ta, Mn, V
- a Co / (Pt or Pd) multilayer film and a Co / ⁇ (Pt-Ya) or (Pd-Ya) ⁇ multilayer film layer Ya B, Ta, Ru, Re, Ir, Mn, Mg, Zr, Nb
- a CoCr alloy film and a Co / (Pt or Pd) multilayer film, a FePt alloy, and a CoPt alloy a laminated magnetic film with Cr, B, Ta, Mn, V
- Ya B, Ta, Ru, Re, Ir, Mn, Mg, Zr, Nb
- the second ferromagnetic layer 52 is a ferromagnetic film whose magnetization direction is fixed in a direction non-parallel to the main surface 21.
- the second ferromagnetic layer 52 has a direction perpendicular to the magnetization direction of the second ferromagnetic layer 52 in a direction opposite to the direction perpendicular to the magnetization direction of the first ferromagnetic layer 51.
- the magnetization direction is set.
- the second ferromagnetic layer 52 has a magnetization direction that is anti-parallel to the magnetization direction of the first ferromagnetic layer 51, as indicated by the solid arrows in the figure. This is a so-called perpendicular magnetization film in the Z2 direction (that is, the negative Z-axis direction) in the figure.
- the second ferromagnetic layer 52 can be formed using, for example, the known thin film exemplified above.
- the nonmagnetic layer 53 is a thin film formed of a nonmagnetic material such as Ru, and is provided between the first ferromagnetic layer 51 and the second ferromagnetic layer 52. That is, the fixed layer 5 has a so-called laminated ferrimagnetic structure in which a nonmagnetic layer 53 is interposed between a first ferromagnetic layer 51 and a second ferromagnetic layer 52 whose magnetization directions are antiparallel to each other. Have.
- the fixed layer 5 is configured such that the difference in magnetization between the first ferromagnetic layer 51 and the second ferromagnetic layer 52 is substantially zero.
- the first ferromagnetic layer 51 and the second ferromagnetic layer 52 are formed of the same material and the same thickness.
- FIG. 1 a main configuration as a so-called magnetoresistive element is shown. That is, details (for example, a wiring portion, a protective layer, a base layer, etc.) necessary for an actual element configuration such as a TMR element are not shown in FIG. The same applies to other embodiments shown in FIG.
- an in-plane magnetization free layer 3 is provided.
- the fixed layer 5 has a laminated ferrimagnetic structure in which a nonmagnetic layer 53 is sandwiched between a first ferromagnetic layer 51 and a second ferromagnetic layer 52 whose perpendicular magnetization direction components are opposite to each other. ing.
- the leakage of the magnetic field from the fixed layer 5 can be suppressed as much as possible. That is, a decrease in detection accuracy due to the leakage magnetic field from the fixed layer 5 can be satisfactorily suppressed. Therefore, according to the configuration of the present embodiment, it is possible to detect the magnetic field strength with good accuracy in a wide magnetic field range. Furthermore, in the configuration of the present embodiment, the fixed layer 5 is formed on the substrate 2 side. According to such a configuration, the crystallinity of the substrate 2 can be easily reflected in the fixed layer 5. Therefore, according to such a configuration, the crystallinity of the fixed layer 5 is improved, and hence the magnetization characteristics of the fixed layer 5 are improved.
- the magnetic sensor 1 according to the second embodiment is the first in that the difference in magnetization between the first ferromagnetic layer 51 and the second ferromagnetic layer 52 is not substantially zero.
- the first ferromagnetic layer 51 and the second ferromagnetic layer 52 are formed of the same material.
- the first ferromagnetic layer 51 and the second ferromagnetic layer 52 are formed to have different thicknesses. In the example of FIG.
- the first ferromagnetic layer 51 that is positioned closer to the intermediate layer 4 than the nonmagnetic layer 53 and is magnetized in the Z1 direction is different from the intermediate layer 4 with the nonmagnetic layer 53 interposed therebetween. It is formed thicker than the second ferromagnetic layer 52 located on the opposite side and magnetized in the Z2 direction. That is, the magnetization amount of the first ferromagnetic layer 51 on the intermediate layer 4 side is larger than that of the second ferromagnetic layer 52. Therefore, the magnetization amount of the fixed layer 5 as a whole in the direction perpendicular to the plane does not become zero but a predetermined amount in the Z1 direction.
- the magnetic sensor 1 according to the second embodiment has the same configuration as that of the first embodiment. Therefore, in the following description, description of the same configuration and effect as the first embodiment is omitted.
- the configuration of the present embodiment it is possible to detect the magnetic field strength with good accuracy in a wide magnetic field range.
- the magnetization amount of the fixed layer 5 as a whole that is, a vector addition of the magnetization amount of the first ferromagnetic layer 51 and the magnetization amount of the second ferromagnetic layer 52
- the fixed layer 5 is configured to take a predetermined amount. Therefore, a configuration in which a bridge circuit connecting a plurality of magnetoresistive element portions is formed on the common substrate 2 (for example, a configuration shown in a fourth embodiment described later) can be easily realized by a simple manufacturing process.
- the magnetic sensor 1 according to the third embodiment is the same as the configuration of the first embodiment and the second embodiment except for the number of fixed layers 5. Therefore, in the following description, description of the same configurations and effects as those of the first embodiment and the second embodiment will be omitted.
- the fixed layer 5 of the magnetic sensor 1 in addition to the first ferromagnetic layer 51, the second ferromagnetic layer 52, and the nonmagnetic layer 53, the fixed layer 5 of the magnetic sensor 1 according to the third embodiment further includes a nonmagnetic layer 54 and a third layer. And a ferromagnetic layer 55.
- the nonmagnetic layer 54 is provided on the opposite side of the nonmagnetic layer 53 with the second ferromagnetic layer 52 interposed therebetween.
- the third ferromagnetic layer 55 is provided between the substrate 2 and the nonmagnetic layer 53.
- the third ferromagnetic layer 55 is a ferromagnetic film having a magnetization direction fixed in a direction non-parallel to the main surface 21.
- the third ferromagnetic layer 55 has a direction perpendicular to the magnetization direction of the third ferromagnetic layer 55 so that the component perpendicular to the direction perpendicular to the magnetization direction of the second ferromagnetic layer 52 is opposite to that of the third ferromagnetic layer 55.
- the magnetization direction is set.
- the third ferromagnetic layer 55 has a magnetization direction antiparallel to the magnetization direction of the second ferromagnetic layer 52, as indicated by the solid arrows in the figure. This is a so-called perpendicular magnetization film in the Z1 direction in the figure.
- the third ferromagnetic layer 55 can be formed using, for example, the known thin film exemplified above.
- the fixed layer 5 has a so-called multilayer laminated ferri structure.
- the magnetization amounts of the first ferromagnetic layer 51, the second ferromagnetic layer 52, and the third ferromagnetic layer 55 can be appropriately adjusted using parameters such as the material and the film thickness.
- the configuration in which the magnetization amount as a whole of the fixed layer 5 as shown in FIG. 1 is substantially zero can be obtained even if the magnetization amount as a whole of the fixed layer 5 as shown in FIG.
- a configuration that is not substantially zero can also be realized stably. That is, according to the configuration of the present embodiment, the robustness with respect to variations in the film thickness and / or composition of each layer during manufacturing is improved.
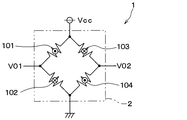
- the magnetic sensor 1 includes a first element unit 101, a second element unit 102, a third element unit 103, and a fourth element unit 104.
- the first element unit 101 is a magnetoresistive element having the same configuration as that of the magnetic sensor 1 of the second embodiment shown in FIG. That is, the first element unit 101 includes the substrate 2, the free layer 3, the intermediate layer 4, and the fixed layer 5 shown in FIG. 2.
- the second element portion 102 is a magnetoresistive element having a configuration in which the magnetization direction of the fixed layer 5 as a whole in the magnetic sensor 1 of the second embodiment shown in FIG. 2 is reversed.
- the magnetization direction of the fixed layer 5 as a whole is different between the first element portion 101 and the second element portion 102.
- the thickness of the first ferromagnetic layer 51 is the same, but the magnetization direction is reversed.
- the thickness of the second ferromagnetic layer 52 is the same, but the magnetization directions are reversed.
- the first ferromagnetic layer 51 magnetized in the Z1 direction is thicker than the second ferromagnetic layer 52 magnetized in the Z2 direction.
- the magnetization direction as a whole of the layer 5 is the Z1 direction.
- the first ferromagnetic layer 51 magnetized in the Z2 direction is more than the second ferromagnetic layer 52 magnetized in the Z1 direction. Since it is thick, the magnetization direction of the fixed layer 5 as a whole is the Z2 direction.
- the third element portion 103 is a magnetoresistive element having the same configuration as the second element portion 102. That is, the magnetization direction of the entire fixed layer 5 is the same in the second element portion 102 and the third element portion 103. Specifically, in the present embodiment, the thickness and the magnetization direction of the first ferromagnetic layer 51 are the same in the second element portion 102 and the third element portion 103. The same applies to the second ferromagnetic layer 52.
- the fourth element unit 104 is a magnetoresistive element having the same configuration as the first element unit 101. That is, the first element portion 101 and the fourth element portion 104 have the same magnetization direction as the entire fixed layer 5.
- the first element part 101, the second element part 102, the third element part 103, and the fourth element part 104 are formed on the common substrate 2. That is, in the present embodiment, a plurality of magnetoresistive element portions each including the free layer 3, the intermediate layer 4, and the fixed layer 5 shown in FIG. 2 are provided on the substrate 2.
- the first element unit 101 and the second element unit 102 are connected in series between the power supply voltage terminals.
- the third element part 103 and the fourth element part 104 are connected in series between the power supply voltage terminals.
- the series connection body of the first element part 101 and the second element part 102 and the series connection body of the third element part 103 and the fourth element part 104 are connected in parallel between the power supply voltage terminals. That is, the first element unit 101, the second element unit 102, the third element unit 103, and the fourth element unit 104 form a so-called full bridge circuit or Wheatstone bridge circuit.
- the terminal potential V01 at the connection portion between the first element portion 101 and the second element portion 102, and the terminal potential V02 at the connection portion between the third element portion 103 and the fourth element portion 104 Magnetic field detection is performed based on the potential difference. According to the magnetic sensor 1 having such a configuration, the influence of disturbance (for example, temperature) at the time of magnetic field detection can be suppressed as much as possible.
- disturbance for example, temperature
- the magnetic sensor 1 having such a configuration can be satisfactorily realized on one substrate 2 by appropriately adjusting known manufacturing conditions including film formation conditions and magnetization conditions. That is, the magnetic sensor 1 having the configuration shown in FIG. 4 can be stably manufactured by using a simple film formation process and magnetization process.
- the substrate 2 may have a single layer structure or a multilayer structure.
- the free layer 3 may have a single layer structure or a multilayer structure.
- the intermediate layer 4 may have a single layer structure or a multilayer structure.
- Each layer constituting the fixed layer 5 may have a single layer structure or a multilayer structure.
- the configuration of the first ferromagnetic layer 51 and the like constituting the fixed layer 5 is not limited to the specific mode shown in the above embodiment.
- the second ferromagnetic layer 52 may be formed thicker than the first ferromagnetic layer 51.
- the material constituting the first ferromagnetic layer 51 and the material constituting the second ferromagnetic layer 52 may be the same or different.
- the material constituting the first ferromagnetic layer 51 and the third ferromagnetic layer 55 may be the same or different. That is, the magnetization amount as a whole of the fixed layer 5 in the perpendicular direction can be appropriately set depending on the magnetization amount per unit dimension of each layer and the dimensions of each layer.
- the first ferromagnetic layer 51 and the second ferromagnetic layer 52 have the same cross-sectional area in the in-plane direction.
- the amount of magnetization per unit thickness of the first ferromagnetic layer 51 is Ms1
- the thickness of the first ferromagnetic layer 51 is t1.
- the amount of magnetization per unit thickness of the second ferromagnetic layer 52 is Ms2
- the thickness of the second ferromagnetic layer 51 is t2.
- Ms1 and Ms2 are positive when the magnetization direction is Z1 and negative when Z2.
- the absolute values of Ms1 and Ms2 can be set as appropriate depending on the selection of materials and the like.
- the magnetization amount Ms in the Z1 direction of the fixed layer 5 is obtained by the following equation. That is, when the value of Ms is negative, the magnetization state of the fixed layer 5 as a whole has an absolute value of ⁇ Ms and a magnetization direction of Z2.
- the material and thickness of each layer can be appropriately set so that Ms is substantially zero in the first embodiment and Ms is a positive or negative predetermined value in the second embodiment.
- Ms Ms1 ⁇ t1 + Ms2 ⁇ t2
- the magnetization direction of the fixed layer 5 becomes the Z1 direction.
- the magnetization direction of the fixed layer 5 becomes the Z2 direction.
- the fixed layer 5 may be provided outside the free layer 3 (that is, on the external magnetic field side). That is, the substrate 2, the free layer 3, the intermediate layer 4, and the fixed layer 5 may be laminated in the perpendicular direction in this order.
- the free layer 3 is formed on the substrate 2 side, the crystallinity of the substrate 2 is easily reflected in the free layer 3. Therefore, in this case, the crystallinity of the free layer 3 is improved, and hence the magnetic properties of the free layer 3 are improved.
- the third element part 103 and the fourth element part 104 in FIG. 4 can be omitted. That is, the magnetic sensor 1 may be a half bridge circuit including a plurality of magnetoresistive elements.
- the magnetization directions of the layers constituting the fixed layer 5 may be opposite to each other in the first element portion 101 and the second element portion 102. That is, the magnetization directions of the first ferromagnetic layer 51 and the second ferromagnetic layer 52 in the first element unit 101 are Z1 and Z2, respectively, while the first ferromagnetic layer 51 and the second ferromagnetic layer 51 in the second element unit 102 are The magnetization directions of the second ferromagnetic layer 52 may be Z2 and Z1, respectively.
- the bridge circuit described above can also be realized by a magnetoresistive element having the configuration shown in FIG.
- the modified examples are not limited to the above examples.
- a plurality of modifications may be combined with each other.
- all or part of the embodiment and all or part of the modification may be combined with each other.
Landscapes
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Nanotechnology (AREA)
- Manufacturing & Machinery (AREA)
- Crystallography & Structural Chemistry (AREA)
- Measuring Magnetic Variables (AREA)
- Hall/Mr Elements (AREA)
Abstract
磁気センサ(1)は、主面(21)を有する基板(2)と、主面と平行な面内方向の磁化容易軸方向を有する自由層(3)と、基板と自由層との間に設けられた中間層(4)と、基板と中間層との間に設けられた固定層(5)とを備える。固定層は、主面と非平行な第一方向に磁化方向が固定された第一強磁性体層(51)と、主面の法線と平行な方向の成分が第一方向とは反対となる第二方向に磁化方向が固定された第二強磁性体層(52)と、第一強磁性体層と第二強磁性体層との間に設けられた非磁性体層(53)とを有する。
Description
本出願は、2016年7月4日に出願された日本特許出願番号2016-132536号に基づくもので、ここにその記載内容が参照により組み入れられる。
本開示は、磁気センサに関する。
磁気抵抗素子を用いて外部磁界を検出する磁気センサが知られている(例えば特開2014-157985号公報等参照)。この種の磁気センサは、磁化方向が固定された固定層(即ちピン層又は磁化固定層)と、磁化方向が外部磁界に応じて変化する自由層(即ち磁化自由層)と、固定層と自由層との間に設けられた中間層とを備えている。
この種の磁気センサにおいて、固定層からの漏れ磁界が自由層に影響することで検出精度が低下するという懸念がある。本開示は上記の点に鑑みてなされたものであり、漏れ磁界に起因する検出精度の低下を良好に抑制することを目的とする。
本開示の1つの観点によれば、磁気センサは、主面を有する基板と、前記主面と平行な面内方向の磁化容易軸方向を有する自由層と、固定層と、前記自由層と前記固定層との間に設けられた中間層とを備えている。前記固定層は、前記主面と非平行な第一方向に磁化方向が固定された第一強磁性体層と、前記主面の法線と平行な方向の成分が前記第一方向とは反対となる第二方向に磁化方向が固定された第二強磁性体層と、前記第一強磁性体層と前記第二強磁性体層との間に設けられた非磁性体層と、を有している。
上記構成において、前記固定層は、磁化方向における前記法線と平行な方向の成分(即ち垂直磁化方向成分)が互いに逆となる前記第一強磁性体層と前記第二強磁性体層との間に前記非磁性体層を挟んだ、いわゆる積層フェリ構造を有している。故に、前記固定層からの磁界の漏れが可及的に抑制され得る。したがって、上記構成によれば、漏れ磁界に起因する検出精度の低下を良好に抑制することが可能となる。
なお、請求の範囲に記載された各手段の括弧内の参照符号は、同手段と後述する実施形態に記載の具体的手段との対応関係の一例を示すものである。よって、本開示の内容は、同参照符号の記載によって、何ら限定されるものではない。
以下、実施形態を、図面に基づいて説明する。なお、以下の説明において、各実施形態の相互で互いに同一又は均等である部分には同一符号を付す。
(第1実施形態)
図1を参照すると、第1実施形態に係る磁気センサ1は、いわゆる磁気抵抗素子であって、基板2と、自由層3と、中間層4と、固定層5とを備えている。基板2は、均一な厚さを有する薄板材であって、例えばシリコンウエハ等を用いて形成されている。基板2は、厚さ方向と直交する平坦な表面である主面21を有する。主面21は、図中XY平面と平行に設けられているものとする。この場合、図中Z軸方向は、主面21の法線と平行な方向となり、これを以下「面直方向」と称する。これに対し、主面21と平行な方向を、以下「面内方向」と称する。
図1を参照すると、第1実施形態に係る磁気センサ1は、いわゆる磁気抵抗素子であって、基板2と、自由層3と、中間層4と、固定層5とを備えている。基板2は、均一な厚さを有する薄板材であって、例えばシリコンウエハ等を用いて形成されている。基板2は、厚さ方向と直交する平坦な表面である主面21を有する。主面21は、図中XY平面と平行に設けられているものとする。この場合、図中Z軸方向は、主面21の法線と平行な方向となり、これを以下「面直方向」と称する。これに対し、主面21と平行な方向を、以下「面内方向」と称する。
自由層3は、図中破線矢印で示されているように、面内方向の磁化容易軸方向を有するように形成されている。このような面内磁化の自由層3は、公知の材料、例えば、Fe、Co、Niのうちの少なくとも一つとBとを含有するアモルファス状態の合金、等を用いて形成することが可能である。
非磁性体層である中間層4は、自由層3と固定層5との間に設けられている。本実施形態においては、中間層4は、基板2と自由層3との間に設けられている。中間層4は、例えば、MgO、AlO等の絶縁体によって形成され得る。この場合、磁気センサ1は、トンネル磁気抵抗素子としての構成を有している。トンネル磁気抵抗素子はTMR素子とも称される。TMRはTunneling Magneto Resistanceの略である。あるいは、中間層4は、例えば、Cu、Ag等の導電体によって形成され得る。この場合、磁気センサ1は、巨大磁気抵抗素子としての構成を有している。巨大磁気抵抗素子はGMR素子とも称される。GMRはGiant Magneto Resistanceの略である。
固定層5は、中間層4を挟んで自由層3と対向配置されている。具体的には、本実施形態においては、固定層5は、基板2と中間層4との間に設けられている。即ち、自由層3と、中間層4と、固定層5と、基板2とが、この順に面直方向に積層されている。本実施形態においては、固定層5は、磁化方向が全体として面直方向を向くように構成されている。即ち、固定層5は、外部磁界を検出する動作に際し、垂直磁化膜としての機能を奏するように構成されている。具体的には、固定層5は、第一強磁性体層51と、第二強磁性体層52と、非磁性体層53と、を有している。
第一強磁性体層51は、主面21と非平行な方向に磁化方向が固定された強磁性体膜である。具体的には、本実施形態においては、第一強磁性体層51は、図中黒塗り矢印で示されているように、磁化方向が面直方向と平行な図中Z1方向(即ちZ軸正方向)となる、いわゆる垂直磁化膜である。第一強磁性体層51は、例えば、以下に例示する公知の薄膜を用いて形成することが可能である。Co/Pt多層膜、Co/Pd多層膜、CoCr合金にPt,Ta,B,Nb等を添加した薄膜、Co/(Pt又はPd)多層膜とCo-Xa/(Pt又はPd)多層膜層(XaはCr,B,Ta,Mn,V)との積層磁性膜、Co/(Pt又はPd)多層膜とCo/{(Pt-Ya)又は(Pd-Ya)}多層膜層(YaはB,Ta,Ru,Re,Ir,Mn,Mg,Zr,Nb)との積層磁性膜、CoCr合金膜とCo/(Pt又はPd)多層膜との積層磁性膜、FePt合金、CoPt合金。
第二強磁性体層52は、主面21と非平行な方向に磁化方向が固定された強磁性体膜である。第二強磁性体層52の磁化方向における面直方向の成分が、第一強磁性体層51の磁化方向における面直方向の成分と反対方向となるように、第二強磁性体層52の磁化方向が設定されている。具体的には、本実施形態においては、第二強磁性体層52は、図中黒塗り矢印で示されているように、磁化方向が第一強磁性体層51の磁化方向と反平行な図中Z2方向(即ちZ軸負方向)となる、いわゆる垂直磁化膜である。第二強磁性体層52は、例えば、上記に例示した公知の薄膜を用いて形成することが可能である。
非磁性体層53は、Ru等の非磁性体によって形成された薄膜であって、第一強磁性体層51と第二強磁性体層52との間に設けられている。即ち、固定層5は、互いの磁化方向が反平行となる第一強磁性体層51と第二強磁性体層52との間に非磁性体層53を介在させた、いわゆる積層フェリ構造を有している。また、本実施形態においては、固定層5は、第一強磁性体層51と第二強磁性体層52との磁化量の差が実質的にゼロとなるように構成されている。具体的には、本実施形態においては、第一強磁性体層51と第二強磁性体層52とは、同一の材料及び同一の厚さで形成されている。
なお、図1においては、いわゆる磁気抵抗素子としての主要な構成が図示されている。即ち、TMR素子等の実際の素子構成に必要な細部(例えば、配線部、保護層、下地層、等)については、図1において図示が省略されている。図2以降に示される他の実施形態についても同様である。
本実施形態の構成においては、面内磁化の自由層3が設けられている。図中実線の白抜き矢印で示されているような、自由層3の磁化困難軸方向である面直方向の外部磁界の検出に際して、自由層の磁化反転は緩やかである。このため、本実施形態の構成によれば、広い磁界範囲での磁界強度の検出が可能となる。また、固定層5は、垂直磁化方向成分が互いに逆となる第一強磁性体層51と第二強磁性体層52との間に非磁性体層53を挟んだ、積層フェリ構造を有している。このため、固定層5からの磁界の漏れが可及的に抑制され得る。即ち、固定層5からの漏れ磁界に起因する検出精度の低下が良好に抑制され得る。したがって、本実施形態の構成によれば、広い磁界範囲にて良好な精度の磁界強度検出が可能となる。さらに、本実施形態の構成においては、基板2側に固定層5が形成されている。かかる構成によれば、基板2の結晶性を固定層5に反映させやすくなる。故に、かかる構成によれば、固定層5の結晶性が向上し、故に固定層5の磁化特性が向上する。
(第2実施形態)
図2を参照すると、第2実施形態に係る磁気センサ1は、第一強磁性体層51と第二強磁性体層52との磁化量の差が実質的にゼロではない点で、第1実施形態の構成と異なる。具体的には、本実施形態においては、第一強磁性体層51と第二強磁性体層52とは、同一の材料で形成されている。一方、第一強磁性体層51と第二強磁性体層52とは、異なる厚さに形成されている。図2の例では、非磁性体層53よりも中間層4側に位置しZ1方向に磁化される第一強磁性体層51の方が、非磁性体層53を挟んで中間層4とは反対側に位置しZ2方向に磁化される第二強磁性体層52よりも厚く形成されている。即ち、中間層4側の第一強磁性体層51の方が、第二強磁性体層52よりも、磁化量が大きい。故に、面直方向における、固定層5の全体としての磁化量は、ゼロとはならず、Z1方向の所定量となる。但し、それ以外は、第2実施形態に係る磁気センサ1は、第1実施形態と同様の構成を有している。よって、以下の説明においては、第1実施形態と同様の構成及び作用効果については説明を省略する。
図2を参照すると、第2実施形態に係る磁気センサ1は、第一強磁性体層51と第二強磁性体層52との磁化量の差が実質的にゼロではない点で、第1実施形態の構成と異なる。具体的には、本実施形態においては、第一強磁性体層51と第二強磁性体層52とは、同一の材料で形成されている。一方、第一強磁性体層51と第二強磁性体層52とは、異なる厚さに形成されている。図2の例では、非磁性体層53よりも中間層4側に位置しZ1方向に磁化される第一強磁性体層51の方が、非磁性体層53を挟んで中間層4とは反対側に位置しZ2方向に磁化される第二強磁性体層52よりも厚く形成されている。即ち、中間層4側の第一強磁性体層51の方が、第二強磁性体層52よりも、磁化量が大きい。故に、面直方向における、固定層5の全体としての磁化量は、ゼロとはならず、Z1方向の所定量となる。但し、それ以外は、第2実施形態に係る磁気センサ1は、第1実施形態と同様の構成を有している。よって、以下の説明においては、第1実施形態と同様の構成及び作用効果については説明を省略する。
かかる構成においても、固定層5を積層フェリ構造とすることで、固定層5からの漏れ磁界に起因する検出精度の低下が良好に抑制され得る。したがって、本実施形態の構成によれば、広い磁界範囲にて良好な精度の磁界強度検出が可能となる。また、固定層5の全体としての磁化量(即ち第一強磁性体層51の磁化量と第二強磁性体層52との磁化量とをベクトル的に加算したもの)が実質的にゼロではない所定量をとるように、固定層5が構成される。故に、複数の磁気抵抗素子部を接続したブリッジ回路を共通の基板2の上に形成した構成(例えば後述の第4実施形態に示す構成)が、簡略な製造工程により容易に実現可能となる。
(第3実施形態)
図3を参照すると、第3実施形態に係る磁気センサ1は、固定層5の層数以外は第1実施形態及び第2実施形態の構成と同様である。よって、以下の説明においては、第1実施形態及び第2実施形態と同様の構成及び作用効果については説明を省略する。
図3を参照すると、第3実施形態に係る磁気センサ1は、固定層5の層数以外は第1実施形態及び第2実施形態の構成と同様である。よって、以下の説明においては、第1実施形態及び第2実施形態と同様の構成及び作用効果については説明を省略する。
第3実施形態に係る磁気センサ1の固定層5は、第一強磁性体層51、第二強磁性体層52、及び非磁性体層53に加えて、さらに非磁性体層54と第三強磁性体層55とを有している。非磁性体層54は、第二強磁性体層52を挟んで非磁性体層53とは反対側に設けられている。第三強磁性体層55は、基板2と非磁性体層53との間に設けられている。
第三強磁性体層55は、主面21と非平行な方向に磁化方向が固定された強磁性体膜である。第三強磁性体層55の磁化方向における面直方向の成分が、第二強磁性体層52の磁化方向における面直方向の成分と反対方向となるように、第三強磁性体層55の磁化方向が設定されている。具体的には、本実施形態においては、第三強磁性体層55は、図中黒塗り矢印で示されているように、磁化方向が第二強磁性体層52の磁化方向と反平行な図中Z1方向となる、いわゆる垂直磁化膜である。第三強磁性体層55は、例えば、上記に例示した公知の薄膜を用いて形成することが可能である。
上述のように、本実施形態においては、固定層5は、いわゆる多層積層フェリ構造を有している。第一強磁性体層51、第二強磁性体層52、及び第三強磁性体層55の磁化量は、材料、膜厚等のパラメータを用いて適宜調整され得る。これにより、図1に示されているような固定層5の全体としての磁化量が実質的にゼロとなる構成も、図2に示されているような固定層5の全体としての磁化量が実質的にゼロとはならない構成も、安定的に実現することが可能となる。即ち、本実施形態の構成によれば、製造時における、各層の膜厚及び/又は組成のばらつきに対するロバスト性が向上する。
(第4実施形態)
図4を参照すると、第4実施形態に係る磁気センサ1は、第一素子部101と、第二素子部102と、第三素子部103と、第四素子部104とを備えている。第一素子部101は、図2に示された第2実施形態の磁気センサ1と同様の構成を有する磁気抵抗素子である。即ち、第一素子部101は、図2に示された基板2と、自由層3と、中間層4と、固定層5とを備えている。
図4を参照すると、第4実施形態に係る磁気センサ1は、第一素子部101と、第二素子部102と、第三素子部103と、第四素子部104とを備えている。第一素子部101は、図2に示された第2実施形態の磁気センサ1と同様の構成を有する磁気抵抗素子である。即ち、第一素子部101は、図2に示された基板2と、自由層3と、中間層4と、固定層5とを備えている。
第二素子部102は、図2に示された第2実施形態の磁気センサ1における固定層5の全体としての磁化方向を逆転させた構成を有する磁気抵抗素子である。以下、本実施形態の説明において、図2及び図4を参照すると、第一素子部101と第二素子部102とでは、固定層5の全体としての磁化方向が異なる。具体的には、本実施形態においては、第一素子部101と第二素子部102とで、第一強磁性体層51の厚さは同一であるが磁化方向は逆になっている。同様に、第一素子部101と第二素子部102とで、第二強磁性体層52の厚さは同一であるが磁化方向は逆になっている。第一素子部101及び第四素子部104においては、Z1方向に磁化された第一強磁性体層51の方が、Z2方向に磁化された第二強磁性体層52よりも厚いため、固定層5の全体としての磁化方向がZ1方向となっている。これに対し、第二素子部102及び第三素子部103においては、Z2方向に磁化された第一強磁性体層51の方が、Z1方向に磁化された第二強磁性体層52よりも厚いため、固定層5の全体としての磁化方向がZ2方向となっている。
第三素子部103は、第二素子部102と同様の構成を有する磁気抵抗素子である。即ち、第二素子部102と第三素子部103とで、固定層5の全体としての磁化方向が同一である。具体的には、本実施形態においては、第二素子部102と第三素子部103とで、第一強磁性体層51の厚さ及び磁化方向が同じとなっている。第二強磁性体層52についても同様である。第四素子部104は、第一素子部101と同様の構成を有する磁気抵抗素子である。即ち、第一素子部101と第四素子部104とで、固定層5の全体としての磁化方向が同一である。
第一素子部101と、第二素子部102と、第三素子部103と、第四素子部104とは、共通の基板2の上に形成されている。即ち、本実施形態においては、基板2の上に、図2に示された自由層3と中間層4と固定層5とを備えた磁気抵抗素子部が複数設けられている。
第一素子部101と第二素子部102とは、電源電圧端子間にて直列接続されている。第三素子部103と第四素子部104とは、電源電圧端子間にて直列接続されている。第一素子部101と第二素子部102との直列接続体と、第三素子部103と第四素子部104との直列接続体とは、電源電圧端子間にて並列接続されている。即ち、第一素子部101と、第二素子部102と、第三素子部103と、第四素子部104とにより、いわゆるフルブリッジ回路又はホイートストンブリッジ回路が形成されている。
かかる構成の磁気センサ1においては、第一素子部101と第二素子部102との接続部分における端子電位V01と、第三素子部103と第四素子部104との接続部分における端子電位V02との電位差に基づいて、磁界検出が行われる。かかる構成の磁気センサ1によれば、磁界検出時の外乱(例えば温度)の影響が、可及的に抑制され得る。
かかる構成の磁気センサ1は、成膜条件及び着磁条件を含む公知の製造条件を適宜調整することで、一つの基板2の上に良好に実現され得る。即ち、図4に示されている構成の磁気センサ1が、簡略な成膜プロセス及び着磁プロセスを用いて安定的に製造され得る。
(変形例)
本開示は上記実施形態に限定されるものではなく、上記実施形態に対しては適宜変更が可能である。以下、代表的な変形例について説明する。以下の変形例の説明においては、上記実施形態と異なる部分についてのみ説明する。したがって、以下の変形例の説明において、上記実施形態と同一の符号を有する構成要素に関しては、技術的に矛盾しない限り、上記実施形態における説明が適宜援用され得る。
本開示は上記実施形態に限定されるものではなく、上記実施形態に対しては適宜変更が可能である。以下、代表的な変形例について説明する。以下の変形例の説明においては、上記実施形態と異なる部分についてのみ説明する。したがって、以下の変形例の説明において、上記実施形態と同一の符号を有する構成要素に関しては、技術的に矛盾しない限り、上記実施形態における説明が適宜援用され得る。
基板2は、単層構造であってもよく、多層構造であってもよい。自由層3は、単層構造であってもよく、多層構造であってもよい。中間層4は、単層構造であってもよく、多層構造であってもよい。固定層5を構成する各層は、単層構造であってもよく、多層構造であってもよい。上述の説明と一部重複するが、自由層3の上、自由層3と中間層4との間、中間層4と固定層5との間、及び固定層5と基板2との間には、任意の層が設けられ得る。磁気センサ1を構成する各層の材料も、上記の例示に限定されない。
固定層5を構成する第一強磁性体層51等の構成も、上記実施形態に示された具体的態様に限定されない。例えば、図2において、第一強磁性体層51よりも第二強磁性体層52の方が厚く形成されていてもよい。第一強磁性体層51を構成する材料と、第二強磁性体層52を構成する材料とは、同一であってもよいし、異なっていてもよい。同様に、第一強磁性体層51を構成する材料と、第三強磁性体層55とは、同一であってもよいし、異なっていてもよい。即ち、面直方向における、固定層5の全体としての磁化量は、各層の単位寸法あたりの磁化量と、各層の寸法とによって、適宜設定され得る。
具体的には、図1及び図2の例において、第一強磁性体層51と第二強磁性体層52とで、面内方向の断面積が同じであるとする。この前提で、第一強磁性体層51の単位厚さあたりの磁化量をMs1、第一強磁性体層51の厚さをt1とする。同様に、第二強磁性体層52の単位厚さあたりの磁化量をMs2、第二強磁性体層51の厚さをt2とする。但し、Ms1及びMs2は、磁化方向がZ1の場合に正、Z2の場合に負の値をとるものとする。Ms1及びMs2の絶対値は、材料の選択等によって適宜設定され得る。この場合、固定層5のZ1方向の磁化量Msは、下記の式によって得られる。即ち、Msの値が負の場合、固定層5の全体としての磁化状態は、絶対値が-Msで磁化方向がZ2となる。第1実施形態ではMsが実質的にゼロとなるように、第2実施形態ではMsが正又は負の所定値をとるように、各層の材料及び厚さが適宜設定され得る。
Ms=Ms1×t1+Ms2×t2
Ms=Ms1×t1+Ms2×t2
よって、例えば、図2の構成において、第一強磁性体層51の厚さt1=ta、磁化量Ms1>0、第二強磁性体層52の厚さt2=tb(但しta>tb)、磁化量Ms2=-Ms1とすることで、固定層5の磁化方向がZ1方向となる。一方、この条件を、第一強磁性体層51の厚さt1=tb、第二強磁性体層52の厚さt2=taと変更することで、固定層5の磁化方向がZ2方向となる。このようにして、磁化量が同一で固定層5の磁化方向が反転した、ブリッジ回路用の2種類の素子部を用意することができる。また、図2において第一強磁性体層51よりも第二強磁性体層52の方を厚くした場合(即ちt1<t2)、第一強磁性体層51の磁化方向がZ1となり第二強磁性体層52の磁化方向がZ2となるように、固定層5の着磁を行うことで、全体としてZ2方向に磁化された固定層5を形成することができる。さらに、図1の構成(即ちt1=t2)においてMs1の絶対値とMs2の絶対値とに差を設けることで、固定層5の全体としての磁化方向を任意に設定することが可能である。
積層フェリ構造を垂直磁化膜にて形成すること自体は、本願の出願時点において既に周知となっている。よって、固定層5における各層を所定の方向に磁化させるための着磁方法は、周知の方法を用いることが可能である。
固定層5は、自由層3よりも外側(即ち外部磁界側)に設けられていてもよい。即ち、基板2と、自由層3と、中間層4と、固定層5とが、この順に面直方向に積層されていてもよい。自由層3を基板2側に形成した場合、基板2の結晶性を自由層3に反映させやすくなる。故に、この場合、自由層3の結晶性が向上し、故に自由層3の磁気特性が向上する。
図4における第三素子部103及び第四素子部104は、省略され得る。すなわち、磁気センサ1は、複数の磁気抵抗素子によるハーフブリッジ回路であってもよい。
上述のブリッジ回路を構成する際に、第一素子部101と第二素子部102とで、固定層5を構成する各層の磁化方向を互いに逆方向としてもよい。即ち、第一素子部101における第一強磁性体層51及び第二強磁性体層52の磁化方向がそれぞれZ1,Z2とされる一方、第二素子部102における第一強磁性体層51及び第二強磁性体層52の磁化方向がそれぞれZ2,Z1とされてもよい。
上述のブリッジ回路は、図3に示された構成の磁気抵抗素子によっても実現され得る。
変形例も、上記の例示に限定されない。また、複数の変形例が、互いに組み合わされ得る。更に、実施形態の全部又は一部と、変形例の全部又は一部とが、互いに組み合わされ得る。
Claims (7)
- 磁気センサ(1)であって、
主面(21)を有する基板(2)と、
前記主面と平行な面内方向の磁化容易軸方向を有する自由層(3)と、
前記主面と非平行な第一方向(Z1)に磁化方向が固定された第一強磁性体層(51)と、前記主面の法線と平行な方向の成分が前記第一方向とは反対となる第二方向(Z2)に磁化方向が固定された第二強磁性体層(52)と、前記第一強磁性体層と前記第二強磁性体層との間に設けられた非磁性体層(53)と、を有する固定層(5)と、
前記自由層と前記固定層との間に設けられた中間層(4)と、
を備えた磁気センサ。 - 前記第二方向は前記第一方向と反平行である、請求項1に記載の磁気センサ。
- 前記第一方向は前記法線と平行である、請求項1又は2に記載の磁気センサ。
- 前記第一強磁性体層と前記第二強磁性体層との磁化量の差が実質的にゼロである、請求項1~3のいずれか1つに記載の磁気センサ。
- 前記第一強磁性体層と前記第二強磁性体層との磁化量の差が実質的にゼロではない、請求項1~3のいずれか1つに記載の磁気センサ。
- 前記基板には、前記自由層と前記中間層と前記固定層とを備えた素子部(101~104)が複数設けられ、
複数の前記素子部のうちの一つである第一素子部(101)における前記固定層と、複数の前記素子部のうちの他の一つである第二素子部(102)における前記固定層とで、磁化方向が異なる、請求項1~5のいずれか1つに記載の磁気センサ。 - 複数の前記素子部がブリッジ回路を形成している、請求項6に記載の磁気センサ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201780040532.XA CN109478593A (zh) | 2016-07-04 | 2017-06-29 | 磁传感器 |
| DE112017003371.3T DE112017003371T5 (de) | 2016-07-04 | 2017-06-29 | Magnetsensor |
| US16/233,602 US20190137578A1 (en) | 2016-07-04 | 2018-12-27 | Magnetic sensor |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016-132536 | 2016-07-04 | ||
| JP2016132536A JP6702034B2 (ja) | 2016-07-04 | 2016-07-04 | 磁気センサ |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US16/233,602 Continuation US20190137578A1 (en) | 2016-07-04 | 2018-12-27 | Magnetic sensor |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018008525A1 true WO2018008525A1 (ja) | 2018-01-11 |
Family
ID=60912772
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/023983 WO2018008525A1 (ja) | 2016-07-04 | 2017-06-29 | 磁気センサ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20190137578A1 (ja) |
| JP (1) | JP6702034B2 (ja) |
| CN (1) | CN109478593A (ja) |
| DE (1) | DE112017003371T5 (ja) |
| WO (1) | WO2018008525A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019040408A1 (en) * | 2017-08-24 | 2019-02-28 | Everspin Technologies, Inc. | MAGNETIC FIELD SENSOR AND METHOD OF MANUFACTURING |
| DE102019126320A1 (de) * | 2019-09-30 | 2021-04-01 | Infineon Technologies Ag | Magnetoresistiver Sensor und Fertigungsverfahren für einen magnetoresistiven Sensor |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109283228B (zh) * | 2018-11-19 | 2024-07-23 | 江苏多维科技有限公司 | 一种基于磁阻元件的氢气传感器及其检测氢气的方法 |
| CN209783606U (zh) * | 2019-05-23 | 2019-12-13 | 歌尔股份有限公司 | 一种磁传感器模组 |
| CN111430535A (zh) * | 2020-03-19 | 2020-07-17 | 西安交通大学 | 一种测试灵敏方向可调的gmr磁场传感器及制备方法 |
| US11630168B2 (en) * | 2021-02-03 | 2023-04-18 | Allegro Microsystems, Llc | Linear sensor with dual spin valve element having reference layers with magnetization directions different from an external magnetic field direction |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014157985A (ja) * | 2013-02-18 | 2014-08-28 | Denso Corp | センサ用磁気抵抗素子、およびセンサ回路 |
| WO2015033464A1 (ja) * | 2013-09-09 | 2015-03-12 | 株式会社日立製作所 | 磁気センサ素子 |
| JP2015207593A (ja) * | 2014-04-17 | 2015-11-19 | 三星電子株式会社Samsung Electronics Co.,Ltd. | 磁気抵抗素子 |
| WO2015195122A1 (en) * | 2014-06-18 | 2015-12-23 | Intel Corporation | Coupled spin hall nano oscillators with tunable strength |
| JP2016039313A (ja) * | 2014-08-08 | 2016-03-22 | 株式会社デンソー | 磁気抵抗素子 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5465185A (en) * | 1993-10-15 | 1995-11-07 | International Business Machines Corporation | Magnetoresistive spin valve sensor with improved pinned ferromagnetic layer and magnetic recording system using the sensor |
| US6771472B1 (en) * | 2001-12-07 | 2004-08-03 | Seagate Technology Llc | Structure to achieve thermally stable high sensitivity and linear range in bridge GMR sensor using SAF magnetic alignments |
| US20040184311A1 (en) * | 2003-03-18 | 2004-09-23 | Manish Sharma | Magnetic sensor |
| DE102007032867B4 (de) * | 2007-07-13 | 2009-12-24 | Infineon Technologies Ag | Magnetoresistive Magnetfeldsensorstrukturen und Herstellungsverfahren |
| JP5448438B2 (ja) * | 2008-12-19 | 2014-03-19 | エイチジーエスティーネザーランドビーブイ | 磁気リード・ヘッド |
| KR20130015927A (ko) * | 2011-08-05 | 2013-02-14 | 에스케이하이닉스 주식회사 | 멀티 레벨을 갖는 자기 저항 메모리 장치 및 그 구동방법 |
| CN102565727B (zh) * | 2012-02-20 | 2016-01-20 | 江苏多维科技有限公司 | 用于测量磁场的磁电阻传感器 |
| CN104170074B (zh) * | 2012-04-09 | 2017-04-26 | 国立大学法人东北大学 | 磁阻效应元件及磁存储器 |
| JP5664706B2 (ja) * | 2012-07-05 | 2015-02-04 | 株式会社デンソー | 磁気センサ |
| CN103543414A (zh) * | 2012-07-13 | 2014-01-29 | 爱盛科技股份有限公司 | 三维平面磁传感器 |
| JP5795288B2 (ja) * | 2012-08-02 | 2015-10-14 | 株式会社日立製作所 | スピントルク発振器を有するマイクロ波アシスト磁気記録ヘッド及び磁気記録装置 |
| US20140062470A1 (en) * | 2012-08-29 | 2014-03-06 | Meng-Huang Lai | Three-dimensional in-plane magnetic sensor |
| EP2860542B1 (en) * | 2013-10-11 | 2016-04-20 | Crocus Technology S.A. | Method for measuring three-dimensional magnetic fields |
| JP6513407B2 (ja) | 2015-01-20 | 2019-05-15 | 株式会社イシダ | 振分装置及び検査振分システム |
-
2016
- 2016-07-04 JP JP2016132536A patent/JP6702034B2/ja active Active
-
2017
- 2017-06-29 DE DE112017003371.3T patent/DE112017003371T5/de not_active Ceased
- 2017-06-29 WO PCT/JP2017/023983 patent/WO2018008525A1/ja active Application Filing
- 2017-06-29 CN CN201780040532.XA patent/CN109478593A/zh active Pending
-
2018
- 2018-12-27 US US16/233,602 patent/US20190137578A1/en not_active Abandoned
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014157985A (ja) * | 2013-02-18 | 2014-08-28 | Denso Corp | センサ用磁気抵抗素子、およびセンサ回路 |
| WO2015033464A1 (ja) * | 2013-09-09 | 2015-03-12 | 株式会社日立製作所 | 磁気センサ素子 |
| JP2015207593A (ja) * | 2014-04-17 | 2015-11-19 | 三星電子株式会社Samsung Electronics Co.,Ltd. | 磁気抵抗素子 |
| WO2015195122A1 (en) * | 2014-06-18 | 2015-12-23 | Intel Corporation | Coupled spin hall nano oscillators with tunable strength |
| JP2016039313A (ja) * | 2014-08-08 | 2016-03-22 | 株式会社デンソー | 磁気抵抗素子 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019040408A1 (en) * | 2017-08-24 | 2019-02-28 | Everspin Technologies, Inc. | MAGNETIC FIELD SENSOR AND METHOD OF MANUFACTURING |
| US10794968B2 (en) | 2017-08-24 | 2020-10-06 | Everspin Technologies, Inc. | Magnetic field sensor and method of manufacture |
| DE102019126320A1 (de) * | 2019-09-30 | 2021-04-01 | Infineon Technologies Ag | Magnetoresistiver Sensor und Fertigungsverfahren für einen magnetoresistiven Sensor |
| US11467232B2 (en) | 2019-09-30 | 2022-10-11 | Infineon Technologies Ag | Magnetoresistive sensor and fabrication method for a magnetoresistive sensor |
| DE102019126320B4 (de) | 2019-09-30 | 2024-03-28 | Infineon Technologies Ag | Magnetoresistiver Sensor und Fertigungsverfahren für einen magnetoresistiven Sensor |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112017003371T5 (de) | 2019-03-21 |
| CN109478593A (zh) | 2019-03-15 |
| JP6702034B2 (ja) | 2020-05-27 |
| US20190137578A1 (en) | 2019-05-09 |
| JP2018006598A (ja) | 2018-01-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2018008525A1 (ja) | 磁気センサ | |
| JP2018517225A (ja) | 磁気抵抗センサ | |
| US10060992B2 (en) | Magnetic sensor including bias magnetic field generation unit for generating stable bias magnetic field | |
| JP5686635B2 (ja) | 磁気センサ及びその製造方法 | |
| EP3091364B1 (en) | Magnetic sensor, method of manufacturing magnetic sensor, and method of designing magnetic sensor | |
| JP2015125019A (ja) | 電流センサ、電流測定モジュール及びスマートメータ | |
| US11002803B2 (en) | Magnetic field detection device | |
| CN111090063B (zh) | 磁传感器 | |
| US11650272B2 (en) | Magnetism detection device | |
| WO2018079404A1 (ja) | 磁気センサおよびその製造方法 | |
| JP2011103336A (ja) | 磁気抵抗効果素子およびそれを用いたセンサ | |
| WO2018037634A1 (ja) | 磁気センサおよび電流センサ | |
| CN114937736B (zh) | 一种宽量程tmr传感器隧道结及传感器 | |
| US20170371006A1 (en) | Magnetic sensor and current sensor | |
| JP2015135267A (ja) | 電流センサ | |
| JP2011017713A (ja) | 磁気センサ及び磁場強度測定方法 | |
| US11488758B2 (en) | Exchange coupling film, and magnetoresistive sensor and magnetic detector including the same | |
| WO2011111457A1 (ja) | 磁気センサ及びそれを備えた磁気平衡式電流センサ | |
| JP6881413B2 (ja) | 磁気センサ | |
| JP2016157818A (ja) | 磁気センサおよび電流センサ | |
| JP6204391B2 (ja) | 磁気センサおよび電流センサ | |
| CN109541503A (zh) | 磁传感器 | |
| JP2019056685A (ja) | 磁気センサ | |
| WO2022209548A1 (ja) | 磁気センサ | |
| JP7023428B1 (ja) | 磁気センサ素子、磁気センサおよび磁気センサ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17824130 Country of ref document: EP Kind code of ref document: A1 |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 17824130 Country of ref document: EP Kind code of ref document: A1 |