WO2017208306A1 - 自動走行作業車両 - Google Patents
自動走行作業車両 Download PDFInfo
- Publication number
- WO2017208306A1 WO2017208306A1 PCT/JP2016/065918 JP2016065918W WO2017208306A1 WO 2017208306 A1 WO2017208306 A1 WO 2017208306A1 JP 2016065918 W JP2016065918 W JP 2016065918W WO 2017208306 A1 WO2017208306 A1 WO 2017208306A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- steering
- target
- deviation
- value
- calculation unit
- Prior art date
Links
- 238000004364 calculation method Methods 0.000 claims abstract description 67
- 230000003247 decreasing effect Effects 0.000 claims description 6
- 230000009467 reduction Effects 0.000 claims description 3
- 239000013585 weight reducing agent Substances 0.000 claims description 2
- 230000007423 decrease Effects 0.000 abstract description 8
- 230000008030 elimination Effects 0.000 abstract description 3
- 238000003379 elimination reaction Methods 0.000 abstract description 3
- 238000010586 diagram Methods 0.000 description 10
- 241000209094 Oryza Species 0.000 description 6
- 235000007164 Oryza sativa Nutrition 0.000 description 6
- 235000009566 rice Nutrition 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 230000007246 mechanism Effects 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 238000001514 detection method Methods 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 241001124569 Lycaenidae Species 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000009194 climbing Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000004069 differentiation Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000009313 farming Methods 0.000 description 1
- 239000002689 soil Substances 0.000 description 1
- 239000010902 straw Substances 0.000 description 1
- 238000003971 tillage Methods 0.000 description 1
Images





Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B69/00—Steering of agricultural machines or implements; Guiding agricultural machines or implements on a desired track
- A01B69/007—Steering or guiding of agricultural vehicles, e.g. steering of the tractor to keep the plough in the furrow
- A01B69/008—Steering or guiding of agricultural vehicles, e.g. steering of the tractor to keep the plough in the furrow automatic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/002—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits computing target steering angles for front or rear wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/02—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to vehicle speed
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D41/00—Combines, i.e. harvesters or mowers combined with threshing devices
- A01D41/12—Details of combines
- A01D41/127—Control or measuring arrangements specially adapted for combines
- A01D41/1278—Control or measuring arrangements specially adapted for combines for automatic steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/20—Steering systems
- B60W2710/207—Steering angle of wheels
Definitions
- the present invention relates to an automatic traveling work vehicle that performs automatic steering traveling along a set target traveling route.
- Patent Document 1 discloses a teaching route generation unit based on position information measured by a GPS (Global Positioning System) device.
- GPS Global Positioning System
- a rice transplanter that generates a target route parallel to the generated teaching route and autonomously travels on the target route is disclosed.
- an actual travel route during automatic travel is measured by the GPS unit, and a deviation amount between the target route and the actual travel target route is calculated and compared with a preset threshold value.
- the angle between the target path direction and the traveling direction is used as the amount of deviation. If the amount of deviation exceeds the threshold, the direction of deviation from the reference line is detected and judged, and the deviation to the left is detected.
- the steering device is corrected in the right direction according to the amount of deviation, and if a deviation occurs in the right direction, the steering device is corrected in the left direction according to the amount of deviation.
- a deviation occurs in the steering device in the right direction according to the amount of deviation.
- only the angle formed by the target route direction and the traveling direction is used for steering control as a driving shift, so the target route and the vehicle body are close to each other.
- only the deviation amount is large, or when the target route is far away from the vehicle body even though the deviation amount is small, it is difficult to travel appropriately.
- a target travel route (target track) in which various curvatures are mixed, a lateral shift amount and an azimuth shift amount from the target travel route, and a target travel
- the curvature of the route is measured, and the steering angle corresponding to the two deviation amounts and the curvature is calculated and output.
- a reference point is provided so that the vehicle position is in the normal direction of the target travel route, and relative to the coordinate system, the coordinate system is a relative coordinate system based on the reference point from the absolute coordinate system of the vehicle position.
- the feedforward operation amount according to the deviation amount by proportional control and the feed forward according to the curvature and lateral deviation amount of the target track The steering angle is determined by the amount of operation.
- this traveling control technology may be effective for automobiles traveling on paved roads, but it is useful for farming machines such as rice transplanters, tractors, combines, lawn mowers, and civil engineering machines such as dozers.
- the traveling speed is low, it takes time to eliminate the traveling deviation compared to a vehicle that travels at a high speed at the same steering angle.
- JP ⁇ 2008-131880 A Japanese Unexamined Patent Publication No. 2002-215239 (JP 2002-215239 A)
- an object of the present invention is to provide an automatic traveling work vehicle capable of performing automatic steering traveling with high accuracy even during working traveling along a set target traveling route.
- a second control calculation unit that outputs a second steering value calculated for eliminating the deviation based on the azimuth deviation adjusted in accordance with the first steering value and the second steering value.
- a target steering calculation unit that outputs a target steering value, a steering drive control unit that outputs a steering drive signal with the target steering value as an input, and a steering drive unit that steers steered wheels based on the steering drive signal; It has.
- the target steering value for traveling along the target travel route is output from the position deviation with respect to the target travel route and the azimuth deviation with respect to the target travel route.
- a positional deviation with respect to the target travel route is also taken into consideration. Specifically, a weighting function for deriving a weighting coefficient using the position deviation as a variable is introduced, and at this time, the weighting function tends to decrease as the position deviation increases.
- the weighting coefficient w is obtained by G (d), and G is a function that decreases monotonously or decreases stepwise.
- w is usually a numerical value greater than 0 and less than or equal to 1.
- the weight coefficient w is used in multiplication.
- a vehicle speed calculation unit for calculating a vehicle speed is provided, and the target steering calculation unit is configured to calculate the first steering value and the second steering value.
- an adjustment function for deriving an adjustment coefficient for example, a numerical value greater than 0 and equal to or less than 1 using the vehicle speed as a variable is introduced.
- the adjustment function tends to decrease as the vehicle speed increases.
- K the adjustment coefficient k is obtained by K (k)
- K is a function that decreases monotonously or decreases stepwise.
- the adjustment coefficient k is used for multiplication.
- the target steering calculation unit includes the target steering unit. It has an upper limiter function for the steering value, and an upper limit value is set according to the vehicle speed. This upper limit value is preferably changeable depending on the work type. As a result, appropriate deviation cancellation from low speed running to high speed running is realized, and automatic steering running is stabilized.
- One of the features of the present invention is that, as described above, when the position deviation is large, the azimuth deviation is ignored to some extent, and a target steering value that emphasizes the elimination of the position deviation is output. At that time, it is more likely that automatic steering traveling adapted to the work can be obtained by changing the degree of ignoring the azimuth deviation depending on the state of the soil and the work type. For this reason, in one preferred embodiment of the present invention, the weight reduction degree using the weighting coefficient of the azimuth deviation depending on the magnitude of the position deviation in the second control calculation unit can be changed. It is configured as follows.
- the target steering calculation unit is configured to add the first steering value and the second steering value and output the target steering value.
- an automatic traveling work vehicle (hereinafter, simply referred to as a working vehicle), a farm working machine such as a rice transplanter, a tractor, or a combiner that repeats a linear traveling work while performing a U-turn on a farm field is assumed.
- This work vehicle is configured to perform automatic steering travel along a preset target travel route.
- this work vehicle includes satellite navigation equipment using a satellite called GPS (Global Positioning System) or GNSS (Global Navigation Satellite System) and inertial navigation equipment using an accelerometer and a gyro.
- GPS Global Positioning System
- GNSS Global Navigation Satellite System
- the vehicle position is indicated by a positioning value (latitude, longitude) at the center of the work vehicle
- the vehicle direction is a traveling direction calculated from a change in the vehicle position of the unit time. Indicated by GPS (Global Positioning System) or GNSS (Global Navigation Satellite System)
- the distance between a straight line drawn parallel to the straight target travel route (azimuth line) from the center of the work vehicle and the target travel route: d is treated as a positional deviation, and the vehicle body passes through the vehicle center.
- An angle formed by the front-rear direction line (traveling azimuth) and the target travel route: ⁇ is treated as an azimuth deviation.
- the target vehicle position in the automatic steering travel control is a point on the target travel route, and the target vehicle direction is the direction of the target travel route. Accordingly, the positional deviation between the vehicle position relative to the target travel route is d, and the azimuth deviation between the azimuth line of the target travel route and the travel azimuth is ⁇ .
- the first steering value for eliminating the deviation is calculated based on the position deviation.
- a PID (Proportional-Integral-Differential) control calculation can be preferably employed.
- the second steering value for eliminating the deviation is calculated based on the azimuth deviation, and the position deviation is also taken into consideration at that time.
- the azimuth deviation weight in the second steering value is reduced.
- a weighting coefficient w (0 ⁇ w ⁇ 1) is obtained that decreases as the position deviation increases.
- W (d) is created, and the second steering value is obtained by W (d) ⁇ F ( ⁇ ).
- the PID control calculation is preferably employed also when the second steering value is derived based on the azimuth deviation.
- a target steering value for the work vehicle to travel along the target travel route is obtained and output.
- the target steering value can be obtained by an addition operation that takes into account the signs of the first steering value and the second steering value.
- a steering control system is provided that outputs a steering drive signal to a steering drive unit that drives the steering angle of a steered wheel (including a crawler) of the work vehicle using the target steering value as an input.
- the steering drive unit can be composed of an electric motor, hydraulic equipment, or both.
- the steering control system is preferably constructed by a PI (Proportional-Integral) feedback control method, but other control methods may be used.
- the steering speed and the steering angle are adopted as feedback.
- the traveling speed of the work vehicle that is, the vehicle speed
- the vehicle speed when obtaining the target steering value from the first steering value and the second steering value. That is, when the steering angle is the same, the vehicle body posture change amount per hour increases as the vehicle speed increases. If the amount of posture change per hour becomes too large, there is a disadvantage that the field is threatened. For this reason, it is preferable to weaken the target steering value calculated from the first steering value and the second steering value as the vehicle speed increases.
- the target steering value calculated during low-speed traveling may be used as it is, and the target steering value may be decreased at a predetermined reduction rate during high-speed traveling above a predetermined level.
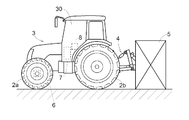
- the work vehicle is a tractor equipped with a work device that performs farm work such as tillage work on a farm field that is bounded by straw.
- a steering section 30 is formed at the center of the vehicle body 3 supported by the front wheels 2a and the rear wheels 2b.
- a ground working device 5 is provided at the rear of the vehicle body 3 via a hydraulic lifting mechanism 4.
- the front wheel 2a functions as a steered wheel, and the traveling direction of the tractor is changed by changing the steering angle.
- the steering angle of the front wheel 2 a is changed by the operation of the steering mechanism 6.
- the steering mechanism 6 is provided with a steering drive unit 60 (described later, see FIG.
- the steering unit 30 is also provided with a positioning unit 8 for measuring the position of the own aircraft that is necessary during the steering operation.
- the positioning unit 8 includes a satellite navigation module configured as a GNSS module and an inertial navigation module configured as a gyro module incorporating a gyro acceleration sensor and a magnetic bearing sensor.
- the satellite navigation module includes a satellite antenna for receiving GPS signals and GNSS signals, but is omitted in FIG.
- FIG. 3 shows a control system equipped in this work vehicle.
- This control system uses the basic principle of the automatic steering control described with reference to FIG.
- the control system shown in FIG. 3 includes an electronic control unit 7, a positioning unit 8, a switch / sensor group 9, and a steering drive unit 60.
- the positioning unit 8 includes a satellite navigation module 81 that detects an orientation such as latitude and longitude using GNSS, and its configuration is similar to that of a positioning unit used in a car navigation system or the like.
- the positioning unit 8 includes an inertial navigation module 82 having a gyro acceleration sensor and the like in order to detect instantaneous work vehicle movement (direction vector and the like) and direction, and to complement the satellite navigation module 81. Is provided.
- the steering drive unit 60 adjusts the steering angle of the front wheels 2 a that are steered wheels based on the steering drive signal output from the electronic control unit 7.
- the switch / sensor group 9 is a general term for switches and sensors for detecting the traveling state and setting state of the work vehicle.
- the switch / sensor group 9 includes a sensor that outputs a detection signal for calculating the vehicle speed, and a sensor that outputs a detection signal for calculating the driving state (for example, operation speed and steering angle) of the steering drive unit 60. include.
- the electronic control unit 7 includes a reference route acquisition unit 71, a reference route setting unit 72, a vehicle position calculation unit 731, a vehicle direction calculation unit 732, a position deviation calculation unit 741, a direction, as functional units particularly related to the present invention.
- a deviation calculator 742, a first control calculator 751, a second control calculator 752, a target steering calculator 76, a vehicle speed calculator 78, and a steering drive controller 79 are included.
- the reference path acquisition unit 71 includes field information such as the map position of the farm field that is the work target and the position data of the ridge that defines the boundary line of the field, and device setting data relating to the field work to be performed (for example, work width) ) And the like, a target travel route for automatic steering work travel is acquired. Regarding acquisition of the target travel route, downloading from a remote management server, reading from the target travel route possessed by the work vehicle itself for each field and operation, etc. can be employed. You may calculate and obtain
- the target travel route may be calculated through teaching travel.
- the own vehicle position calculation unit 731 calculates the own vehicle position on the work travel map based on the positioning data sent from the positioning unit 8.
- the own vehicle direction calculation unit 732 calculates the traveling direction of the own vehicle on the work travel map based on the positioning data sent from the positioning unit 8.
- the position deviation calculation unit 741 calculates a position deviation (indicated by symbol d in FIG. 1) between the vehicle position relative to the target travel route.
- the azimuth deviation calculation unit 742 calculates an azimuth deviation (indicated by the symbol ⁇ in FIG. 1) between the azimuth line of the target travel route and the travel azimuth.
- the first control calculation unit 751 outputs the first steering value calculated for eliminating the deviation based on the position deviation.
- the second control calculation unit 752 reduces the weight of the azimuth deviation using the weighting coefficient as described above, and then performs the second control for eliminating the deviation based on the position deviation and the azimuth deviation.
- the steering value is output.
- the second control calculation unit 752 outputs a provisional second steering value for canceling the deviation based on the azimuth deviation, and reduces the provisional second steering value as the position deviation increases so that the formal second steering value is obtained. It may be configured to output as Note that the degree of reduction of the azimuth deviation depending on the magnitude of the position deviation can be adjusted or changed through the input device.
- the target steering calculation unit 76 outputs a target steering value for the work vehicle to travel along the target travel route based on the first steering value and the second steering value. In the simplest form, the addition calculation result of the first steering value and the second steering value becomes the target steering value.
- the target steering value output from the target steering calculation unit 76 is used as an input parameter in a control calculation for outputting a steering drive signal for driving the steering drive unit 60 in the steering drive control unit 79.
- the target steering calculation unit 76 considers the vehicle speed of the work vehicle obtained from the vehicle speed calculation unit 78 when calculating the target steering value, and if the vehicle speed is high, the target steering value and the second steering value are calculated. It also has a function of reducing the target steering value that is calculated and output based on the steering value. Specifically, when the target steering calculation unit 76 outputs the target steering value based on the first steering value and the second steering value, the target steering calculation unit 76 uses the adjustment coefficient k that shows a decreasing tendency as the vehicle speed increases. When the vehicle speed is high, the target steering value is reduced.
- a steering upper limit setting unit 760 is incorporated in the target steering calculation unit 76, and the steering upper limit setting unit 760 uses the first steering value, the second steering value, and further the target steering obtained using the vehicle speed.
- the value has a function of clamping the upper limit, that is, an upper limiter function. It is preferable that the upper limit value also varies depending on the vehicle speed. That is, the steering stability during high-speed traveling is improved by setting the maximum target steering value to be output as the vehicle speed increases.
- the first control calculation unit 751 calculates and outputs a first steering value for reducing the position deviation: d using PI control with the target position deviation: ⁇ d and the position deviation: d as input parameters.
- PID control may be used instead of PI control.
- the second control calculation unit 752 calculates and outputs a temporary second steering value for reducing the azimuth deviation: ⁇ using PI control, with the target azimuth deviation: ⁇ and the azimuth deviation: ⁇ as input parameters.
- PID control may be used instead of PI control.
- the second control calculation unit 752 reduces the provisional second steering value obtained based on the azimuth deviation proportionally or nonlinearly according to the position deviation amount. And output as the second steering value.
- the target steering calculation unit 76 controls and outputs an addition value between the first steering value output from the first control calculation unit 751 and the second steering value output from the second control calculation unit 752 as a target steering value.
- the steering drive control unit 79 is configured as a feedback-type steering control module.
- the steering angle command value: S ⁇ * obtained by the comparison calculation with the actual steering angle: S ⁇ is input, and the preceding output value is obtained by using PI control.
- This previous stage output value is compared with the actual steering speed: S ⁇ output from the speed calculator: du / dt using differentiation, and the PI control is performed with the calculation result (steering speed command value: S ⁇ *) as an input.
- the steering drive signal drives a motor constituting the steering drive unit 60 via a driver to steer the front wheels 2a.
- the PI control in the steering drive control unit 79 may be replaced with PID control.
- FIG. 5 shows a modification of the control diagram of the electronic control unit 7 shown in FIG.
- the control diagram of FIG. 5 differs from FIG. 4 in that a function for reducing the target steering value that is finally output according to the vehicle speed is added to the target steering calculation unit 76. That is, in this modified example, the addition value of the first steering value output from the first control calculation unit 751 and the second steering value output from the second control calculation unit 752 is further increased as the vehicle speed increases. An arithmetic function for reducing the above is added.
- FIG. 6 shows a modification of the control diagram of the electronic control unit 7 shown in FIG.
- the control diagram of FIG. 6 is different from FIG. 5 in that a steering upper limit setting unit 760 is incorporated in the target steering calculation unit 76, and a function for clamping an upper limit of the target steering value that is finally output is added. Yes.
- the maximum target steering value output by the threshold value that changes according to the vehicle speed is suppressed before the obtained target steering value is output.
- the maximum target steering value that is output becomes smaller as the vehicle speed increases.
- the steering drive control unit 79 is configured as a steering control module that uses the actual steering angle and steering speed as feedback amounts.
- the control configuration of the steering drive control unit 79 is not limited, and other known control configurations may be employed.
- the target travel route is regarded as a straight line, but the present invention can be applied even if the target travel route is a curve.
- the positioning unit 8 is configured by the satellite navigation module 81 and the inertial navigation module 82, but may be configured by only the satellite navigation module 81.
- the tractor is exemplified as the automatic traveling work vehicle, but the present invention is not limited to this.
- the automatic traveling work vehicle may be another agricultural work vehicle such as a rice transplanter or a combine that is equipped with various working devices and is capable of automatic steering traveling. Further, the present invention is applicable not only to agricultural work vehicles but also to other work vehicles.
- Steering drive unit 76 Target steering calculation unit 78: Vehicle speed calculation unit 79: Steering drive control unit 731: Own vehicle position calculation unit 732: Own vehicle direction calculation unit 741: Position deviation calculation unit 742: Direction deviation calculation unit 751: 1st control calculating part 752: 2nd control calculating part
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Transportation (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Environmental Sciences (AREA)
- Soil Sciences (AREA)
- Mathematical Physics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Guiding Agricultural Machines (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
自動走行作業車両は、目標走行経路に対する自車位置との間の位置偏差に基づいて、偏差解消のために演算された第1操舵値を出力する第1制御演算部と、位置偏差及び、位置偏差が大きくなるにしたがって減少傾向を示す重み係数を用いて調整された方位偏差に基づいて、偏差解消のために演算された第2操舵値を出力する第2制御演算部と、第1操舵値及び第2操舵値に基づいて、目標走行経路に沿って走行するための目標操舵値を出力する目標操舵演算部と、目標操舵値を入力として操舵駆動信号を出力する操舵駆動制御部と、操舵駆動信号に基づいて操向輪の操舵を行う操舵駆動部と、を備える。
Description
本発明は、設定された目標走行経路に沿って自動操舵走行する自動走行作業車両に関する。
設定された目標走行経路に沿って自動操舵される自動操舵機能を有する作業車両として、特許文献1には、GPS(Global Positioning System)装置により計測される位置情報に基づいて、ティーチング経路生成手段により生成されたティーチング経路に対して平行な目標経路を生成し、該目標経路上を自律的に走行する田植機が開示されている。
この田植機では、自動走行中の実際の走行経路をGPSユニットにより測定し、目標経路と実際の走行目標経路のずれ量が演算され、予め設定した閾値と比較される。その際、目標経路方向と進行方向とが成す角度をずれ量としており、そのずれ量が閾値を越えている場合には、基準線に対するずれの方向を検知して判定を行い、左方にずれが生じている場合にはそのズレ量に応じてステアリング装置を右方向に補正し、右方にズレが生じている場合にはそのズレ量に応じてステアリング装置を左方向に補正する。
しかしながら、このような自動走行の原理を採用した作業車両では、目標経路方向と進行方向とが成す角度だけを走行ズレとして操舵制御に用いているので、目標経路と車体とが接近しているのにずれ量だけが大きい場合や、ずれ量が小さいのに目標経路と車体とが遠く離れている場合には適正な走行が困難となる。
この田植機では、自動走行中の実際の走行経路をGPSユニットにより測定し、目標経路と実際の走行目標経路のずれ量が演算され、予め設定した閾値と比較される。その際、目標経路方向と進行方向とが成す角度をずれ量としており、そのずれ量が閾値を越えている場合には、基準線に対するずれの方向を検知して判定を行い、左方にずれが生じている場合にはそのズレ量に応じてステアリング装置を右方向に補正し、右方にズレが生じている場合にはそのズレ量に応じてステアリング装置を左方向に補正する。
しかしながら、このような自動走行の原理を採用した作業車両では、目標経路方向と進行方向とが成す角度だけを走行ズレとして操舵制御に用いているので、目標経路と車体とが接近しているのにずれ量だけが大きい場合や、ずれ量が小さいのに目標経路と車体とが遠く離れている場合には適正な走行が困難となる。
特許文献2で開示されている車両系の走行制御技術では、いろいろな曲率が混在する目標走行経路(目標軌道)に対しては、目標走行経路からの横ずれ量と方位角のずれ量及び目標走行経路の曲率を計測し、2つのずれ量及び曲率に応じた操舵角が演算出力される。
具体的には、車両位置が目標走行経路の法線方向になるように参照点を設け、その座標系に対して、座標系を車両位置の絶対座標系から参照点を基準とした相対座標系に変換するとともに、目標走行経路からの相対的な横ずれ及び方位角のずれを計算し、比例制御によりずれ量に応じたフィードバック的な操作量と、目標軌道の曲率及び横ずれ量に応じたフィードフォワード的な操作量により、操舵角が求められる。
しかしながら、この走行制御技術は、舗装された道路を走行する自動車などには有効であるかもしれないが、田植機やトラクタやコンバインさらには芝刈機などの農業作業機、あるいはドーザなどの土木作業機では、その走行速度は低速であることから同じ操舵角では高速走行する車両に比べて走行ズレの解消に時間がかかる。さらには、スリップや土塊の乗り上げなどによって瞬時に目標位置からの位置ずれが生じることがある。このため、特許文献2に開示された走行制御技術を、そのまま作業車両の自動操舵走行に適用することができない。
具体的には、車両位置が目標走行経路の法線方向になるように参照点を設け、その座標系に対して、座標系を車両位置の絶対座標系から参照点を基準とした相対座標系に変換するとともに、目標走行経路からの相対的な横ずれ及び方位角のずれを計算し、比例制御によりずれ量に応じたフィードバック的な操作量と、目標軌道の曲率及び横ずれ量に応じたフィードフォワード的な操作量により、操舵角が求められる。
しかしながら、この走行制御技術は、舗装された道路を走行する自動車などには有効であるかもしれないが、田植機やトラクタやコンバインさらには芝刈機などの農業作業機、あるいはドーザなどの土木作業機では、その走行速度は低速であることから同じ操舵角では高速走行する車両に比べて走行ズレの解消に時間がかかる。さらには、スリップや土塊の乗り上げなどによって瞬時に目標位置からの位置ずれが生じることがある。このため、特許文献2に開示された走行制御技術を、そのまま作業車両の自動操舵走行に適用することができない。
上記実情に鑑み、本発明の目的は、設定された目標走行経路に沿って、作業走行中であっても、高い精度をもって自動操舵走行することができる自動走行作業車両を提供することにある。
設定された目標走行経路に沿って自動操舵走行する、本発明による自動走行作業車両は、自車位置を算定する自車位置算定部と、自車の走行方位を算定する自車方位算定部と、前記目標走行経路に対する前記自車位置との間の位置偏差を演算する位置偏差演算部と、前記目標走行経路の方位線と前記走行方位との間の方位偏差を演算する方位偏差演算部と、前記位置偏差に基づいて偏差解消のために演算された第1操舵値を出力する第1制御演算部と、前記位置偏差と、前記位置偏差が大きくなるにしたがって減少傾向を示す重み係数を用いて調整された前記方位偏差とに基づいて、偏差解消のために演算された第2操舵値を出力する第2制御演算部と、前記第1操舵値と前記第2操舵値とに基づいて前記目標走行経路に沿って走行するための目標操舵値を出力する目標操舵演算部と、前記目標操舵値を入力として操舵駆動信号を出力する操舵駆動制御部と、前記操舵駆動信号に基づいて操向輪の操舵を行う操舵駆動部とを備えている。
この構成によれば、目標走行経路に対する位置偏差及び目標走行経路に対する方位偏差とから目標走行経路に沿って走行するための目標操舵値を出力する。しかしながら、単純に目標走行経路に対する位置偏差から偏差解消のために演算された第1操舵値と、目標走行経路に対する方位偏差と偏差解消のために演算される第2操舵値を求めるのではなく、第2操舵値を求める際に、目標走行経路に対する位置偏差も考慮される。具体的には、前記位置偏差を変数として重み係数を導出する重み関数を導入し、その際、この重み関数は位置偏差が大きくなるほど重み係数が減少する傾向を有するものとする。つまり、位置偏差をdとし、重み関数をGとすると、重み係数wは、G(d)で求められ、Gは単調減少、または段階的に減少する関数となる。wは、通常、0より大きく、1以下の数値となる。重み係数wは乗算で用いられる。これにより、前記位置偏差が大きい場合には前記方位偏差の重みが低減されるという条件で、前記位置偏差と前記方位偏差とに基づいて偏差解消の第2操舵値が出力される。そのようにして求められた第1操舵値と第2操舵値とに基づいて、目標走行経路に沿って走行するための最終的な目標操舵値が出力される。この構成では、位置偏差が大きい場合には、方位偏差をある程度無視して、位置偏差の解消に重きをおいた目標操舵値が出力されるので、車体がスリップや土塊の乗り上げなどによって大きな位置偏差(位置ずれ)が生じた場合には、迅速にその位置偏差を解消することができる。このことは、田植機、コンバイン、トラクタ、芝刈機などのように、直線状の目標走行経路から大きく外れてしまうことを、単に真っ直ぐ走行することを犠牲にしても極力避けねばならない作業車両にとって利点がある。
なお、本願では、目標走行経路が直線状であるとして、位置偏差は車体から目標走行経路に下した垂線の長さとして、方位偏差とは車体の走行方向線と目標走行経路とのなす角度として表すことができる値であると定義される。
なお、本願では、目標走行経路が直線状であるとして、位置偏差は車体から目標走行経路に下した垂線の長さとして、方位偏差とは車体の走行方向線と目標走行経路とのなす角度として表すことができる値であると定義される。
低速あるいは中速での走行において適切に偏差解消ための目標操舵値を出力する制御系の場合、同一操舵角度であれば、車速が高速になるほど、一定時間における車体の位置変化や方位変化が大きくなる。その結果、高速走行時には、車体が蛇行しやすくなるという問題がある。この問題を解決するため、本発明の好適な実施形態の1つでは、車速を算定する車速算定部が備えられ、前記目標操舵演算部は、前記第1操舵値と前記第2操舵値とに基づいて前記目標操舵値を出力する際に、前記車速が大きくなるにしたがって減少傾向を示す調整係数を用いて、前記車速が大きい場合には前記目標操舵値を低減するように構成されている。具体的には、前記車速を変数として調整係数(例えば0より大きく1以下の数値)を導出する調整関数を導入し、その際、この調整関数は車速が大きくなるほど調整係数が減少する傾向を有するものとする。つまり、車速をsとし、調整関数をKとすると、調整係数kは、K(k)で求められ、Kは単調減少、または段階的に減少する関数となる。
調整係数kは乗算で用いられる。これにより、車速が高速になれば、目標操舵値が低減されるので、低速走行から高速走行にわたって適切な偏差解消が実現し、自動操舵走行が安定する。
調整係数kは乗算で用いられる。これにより、車速が高速になれば、目標操舵値が低減されるので、低速走行から高速走行にわたって適切な偏差解消が実現し、自動操舵走行が安定する。
車速が高速になればなるほど、偏差解消の操舵角が車体に及ぼす影響が大きくなるという問題に対する別な方策として、本発明による好適な実施形態の1つでは、前記目標操舵演算部は、前記目標操舵値に対する上限リミッタ機能を有し、前記車速に応じて上限リミット値が設定されている。この上限リミット値は作業種によって変更可能であることが好ましい。これにより、低速走行から高速走行にわたって適切な偏差解消が実現し、自動操舵走行が安定する。
本発明の特徴の一つは、上述したように、位置偏差が大きい場合には、方位偏差をある程度無視して、位置偏差の解消に重きをおいた目標操舵値が出力されることである。その際、作業走行する土壌の状態や作業種によって方位偏差を無視する度合を変えた方が、より作業に適応した自動操舵走行が得られる可能性が高い。このため、本発明の好適な実施形態の1つでは、前記第2制御演算部における、前記位置偏差の大きさに依存する前記方位偏差の重み係数を用いた重みの低減度合は、変更可能なように構成されている。
第1操舵値と第2操舵値とに基づいて目標走行経路に沿って走行するための目標操舵値を出力する目標操舵演算部を簡単化するため、本発明の好適な実施形態の1つでは、前記目標操舵演算部は前記第1操舵値と前記第2操舵値とを加算演算して前記目標操舵値を出力するように構成されている。これにより、車体の走行方向を目標走行経路に対して平行な線に一致させる制御を行いつつ、徐々に車体を目標走行経路に接近させる制御を行うことで、特に圃場作業などで要求される直線状の目標走行経路に沿った作業走行が適切に行われる。
本発明による自動走行作業車両の具体的な実施形態を説明する前に、図1を用いて、本発明による自動操舵走行制御の基本原理を説明する。ここでは、自動走行作業車両(以下単に作業車両と略称する)として、圃場で直線状の走行作業をUターンを行いながら繰り返す、田植機、トラクタ、コンバインなどの農作業機が想定されている。この作業車両は、予め設定された目標走行経路に沿って自動操舵走行するように構成されている。自動操舵を行うためには、作業車両の現在の位置(以下「自車位置」と呼ぶ)及び現在の走行方向(自車の走行方位に相当。以下「自車方位」と呼ぶ)を知る必要がある。このため、この作業車両は、GPS(Global Positioning System)ないしはGNSS(Global Navigation Satellite System)と呼ばれる衛星を用いた衛星航法機器と加速度計やジャイロを用いた慣性航法機器を備えている。図1に示されているように、ここでは自車位置は、作業車中心の測位値(緯度、経度)で示され、自車方位は、単位時間自車位置の変化から算定される走行方向で示される。
図1に示すように、作業車中心から直線状の目標走行経路(方位線)に対して平行に引いた直線と目標走行経路との間隔:dが位置偏差として取り扱われ、車体中心を通る車体前後方向線(走行方位)と目標走行経路とがなす角度:θが方位偏差として取り扱われる。自動操舵走行制御における目標となる自車位置は目標走行経路上の点であり、目標となる自車方位は、目標走行経路の方位である。したがって、目標走行経路に対する自車位置との間の位置偏差はdとなり、目標走行経路の方位線と走行方位との間の方位偏差はθとなる。
位置偏差に基づいて偏差解消のための第1操舵値が演算される。この演算には、好ましくはPID(Proportional-Integral-Differential)制御演算を採用することができる。方位偏差に基づいて偏差解消のための第2操舵値が演算されるが、その際には位置偏差も考慮される。位置偏差が大きい場合には、第2操舵値における方位偏差の重みは低減される。例えば、方位偏差に基づいて第2操舵値を導出する関数F(θ)で得られた値に対して、位置偏差が大きいほどその値が小さくなる重み係数w(0<w<1)を導出する関数W(d)を作成しておき、W(d)×F(θ)で、第2操舵値を求める。つまり、位置偏差が大きい場合には方位偏差の重みを低減した上で、前記位置偏差と前記方位偏差とに基づいて偏差解消のための第2操舵値が出力される。なお方位偏差に基づいて第2操舵値を導出する際にも、PID制御演算が採用することが好ましい。
このようにして求められた第1操舵値と第2操舵値とを入力として、作業車両が目標走行経路に沿って走行するための目標操舵値が求められ、出力される。最も簡単には、目標操舵値は、第1操舵値と第2操舵値との符号を考慮した加算演算で求めることができる。さらに、この目標操舵値を入力として、作業車両の操向輪(クローラも含まれる)の操舵角を駆動する操舵駆動部に操舵駆動信号を出力する操舵制御系が備えられている。操舵駆動部は、電気モータまたは油圧機器あるいはその両方で構成することができる。操舵制御系は、PI(Proportional-Integral)フィードバック制御手法で構築することが好ましいが、その他の制御手法を用いてもよい。ここでは、フィードバックとして、操舵速度と操舵角とが採用されている。
なお、図1では点線で示されているが、第1操舵値と第2操舵値とから目標操舵値を求める際に、作業車両の走行速度、つまり車速を考慮することも好適である。つまり同一の操舵角の場合、車速が速いほど時間当たりの車体の姿勢変更量は大きくなる。時間当たりの姿勢変更量が大きくなりすぎると、圃場を荒らすという不都合が生じる。このため、第1操舵値と第2操舵値とから演算された目標操舵値は車速が速いほど弱めることが好ましい。例えば、低速走行時には演算された目標操舵値をそのまま使用し、所定以上の高速走行時には所定の低減割合で目標操舵値を小さくするとよい。
次に、本発明の自動走行作業車両の具体的な実施形態の1つを説明する。
図2に示すように、この実施形態では、作業車両は畦によって境界づけられた圃場に対して耕耘作業などの農作業を行う作業装置を装備したトラクタである。このトラクタは、前輪2aと後輪2bとによって支持された車体3の中央部に操縦部30が形成されている。車体3の後部には油圧式の昇降機構4を介して対地作業装置5が装備されている。前輪2aは操向輪として機能し、その操舵角を変更することでトラクタの走行方向が変更される。前輪2aの操舵角は、操舵機構6の動作によって変更される。操舵機構6には、自動操舵のための操舵駆動部60(後述。図3参照)が備えられている。操舵駆動部60を構成する電気モータの制御は、電子制御ユニット7(後述。図3及び図4参照)からの操舵駆動信号によって行われる。なお、前輪2aの操舵角は従来通りのステアリングホイールの操作によっても可能であり、ステアリングホイールは、操縦部30に各種操作レバーや運転者が着座するシートとともにトラクタの操縦部30に配置されている。操縦部30には、自動操舵操向時に必要となる自機位置を測定するための測位ユニット8も配置されている。測位ユニット8には、GNSSモジュールとして構成されている衛星航法用モジュールやと、ジャイロ加速度センサや磁気方位センサを組み込んだジャイロモジュールとして構成されている慣性航法用モジュールが含まれている。衛星航法用モジュールには、GPS信号やGNSS信号を受信するための衛星用アンテナが含まれているが、図2では省略されている。
図2に示すように、この実施形態では、作業車両は畦によって境界づけられた圃場に対して耕耘作業などの農作業を行う作業装置を装備したトラクタである。このトラクタは、前輪2aと後輪2bとによって支持された車体3の中央部に操縦部30が形成されている。車体3の後部には油圧式の昇降機構4を介して対地作業装置5が装備されている。前輪2aは操向輪として機能し、その操舵角を変更することでトラクタの走行方向が変更される。前輪2aの操舵角は、操舵機構6の動作によって変更される。操舵機構6には、自動操舵のための操舵駆動部60(後述。図3参照)が備えられている。操舵駆動部60を構成する電気モータの制御は、電子制御ユニット7(後述。図3及び図4参照)からの操舵駆動信号によって行われる。なお、前輪2aの操舵角は従来通りのステアリングホイールの操作によっても可能であり、ステアリングホイールは、操縦部30に各種操作レバーや運転者が着座するシートとともにトラクタの操縦部30に配置されている。操縦部30には、自動操舵操向時に必要となる自機位置を測定するための測位ユニット8も配置されている。測位ユニット8には、GNSSモジュールとして構成されている衛星航法用モジュールやと、ジャイロ加速度センサや磁気方位センサを組み込んだジャイロモジュールとして構成されている慣性航法用モジュールが含まれている。衛星航法用モジュールには、GPS信号やGNSS信号を受信するための衛星用アンテナが含まれているが、図2では省略されている。
図3には、この作業車両に装備されている制御系が示されている。この制御系は、図1を用いて説明された自動操舵制御の基本原理を流用している。図3に示されている制御系は、電子制御ユニット7、測位ユニット8、スイッチ・センサ群9、操舵駆動部60を含んでいる。
測位ユニット8は、GNSSを用いて緯度や経度などの方位を検出する衛星航法用モジュール81を備えており、その構成は、カーナビゲーションシステムなどで用いられている測位ユニットに類似している。測位ユニット8には、瞬間的な作業車両の動き(方向ベクトルなど)や向きを検出するために、及び衛星航法用モジュール81を補完するために、ジャイロ加速度センサなどを有する慣性航法用モジュール82が備えられている。操舵駆動部60は、電子制御ユニット7から出力される操舵駆動信号に基づいて操向輪である前輪2aの操舵角を調整する。スイッチ・センサ群9は、作業車両の走行状態や設定状況を検出するスイッチやセンサの総称であり、これらからの検出信号が電子制御ユニット7に入力し、種々の制御のための入力パラメータとして利用される。スイッチ・センサ群9には、車速を算定するための検出信号を出力するセンサや、操舵駆動部60の駆動状態(例えば、操作速度や操舵角)を算定するための検出信号を出力するセンサも含まれている。
電子制御ユニット7には、特に本発明に関係する機能部として、基準経路取得部71、基準経路設定部72、自車位置算定部731、自車方位算定部732、位置偏差演算部741、方位偏差演算部742、第1制御演算部751、第2制御演算部752、目標操舵演算部76、車速算定部78、操舵駆動制御部79が含まれている。
基準経路取得部71は、作業対象となっている圃場の地図位置や当該圃場の境界線を規定する畦の位置データなどの圃場情報や、実施されるべき圃場作業に関する機器設定データ(例えば作業幅)などの作業情報に基づいて、自動操舵作業走行のための目標走行経路を取得する。目標走行経路の取得に関しては、遠隔地の管理サーバからのダウンロード、圃場別及び作業別で作業車両自体が保有する目標走行経路からの読み出しなどを採用することができる。目標走行経路を算定するアルゴリズムによって、その都度演算して求めてもよい。また、ティーチング走行を通じて目標走行経路を算定してもよい。
目標走行経路が決定すると、基準経路設定部72は当該目標走行経路を作業走行用地図に組み込み、自動操舵走行の制御目標として利用できるように内部処理する。
目標走行経路が決定すると、基準経路設定部72は当該目標走行経路を作業走行用地図に組み込み、自動操舵走行の制御目標として利用できるように内部処理する。
自車位置算定部731は、測位ユニット8から送られてくる測位データに基づいて作業走行用地図での自車位置を算定する。自車方位算定部732は、測位ユニット8から送られてくる測位データに基づいて作業走行用地図での自車の走行方位を算定する。位置偏差演算部741は、目標走行経路に対する自車位置との間の位置偏差(図1において記号dで示されている)を演算する。方位偏差演算部742は、目標走行経路の方位線と走行方位との間の方位偏差(図1において記号θで示されている)を演算する。
第1制御演算部751は、位置偏差に基づいて偏差解消のために演算された第1操舵値を出力する。第2制御演算部752は、位置偏差が大きい場合には上述したような重み係数を用いて方位偏差の重みを低減した上で、位置偏差と方位偏差とに基づいて偏差解消のための第2操舵値を出力する。この第2制御演算部752は、方位偏差に基づいて偏差解消のための仮第2操舵値を出力し、この仮第2操舵値を位置偏差が大きいほど低減させて、正式な第2操舵値として出力するように構成してもよい。なお、位置偏差の大きさに依存する方位偏差の低減度合は、入力デバイスを通じて調整又は変更可能である。
目標操舵演算部76は、第1操舵値と第2操舵値とに基づいてこの作業車両が目標走行経路に沿って走行するための目標操舵値を出力する。最も簡単な形態では、第1操舵値と第2操舵値との加算演算結果が目標操舵値となる。目標操舵演算部76から出力された目標操舵値は、操舵駆動制御部79において、操舵駆動部60を駆動するための操舵駆動信号を出力するための制御演算における入力パラメータとして用いられる。
この実施形態では、目標操舵演算部76は、目標操舵値を演算する際に、車速算定部78から得られる作業車両の車速を考慮し、車速が速い場合には、第1操舵値と第2操舵値とに基づいて演算出力される目標操舵値を減じる機能も備えている。具体的には、目標操舵演算部76は、第1操舵値と第2操舵値とに基づいて目標操舵値を出力する際に、車速が大きくなるにしたがって減少傾向を示す調整係数kを用いて、車速が大きい場合には目標操舵値を低減する。
さらには、目標操舵演算部76には操舵上限設定部760が組み込まれており、この操舵上限設定部760は、第1操舵値と第2操舵値とさらには車速を用いて求められた目標操舵値に対して、その上限をクランプする機能、つまり上限リミッタ機能を有する。この上限リミット値も車速によって変動することが好ましい。つまり、車速が大きくなるほど出力される最大目標操舵値が低くなるように設定することで、高速走行時の操向安定性が向上する。
さらには、目標操舵演算部76には操舵上限設定部760が組み込まれており、この操舵上限設定部760は、第1操舵値と第2操舵値とさらには車速を用いて求められた目標操舵値に対して、その上限をクランプする機能、つまり上限リミッタ機能を有する。この上限リミット値も車速によって変動することが好ましい。つまり、車速が大きくなるほど出力される最大目標操舵値が低くなるように設定することで、高速走行時の操向安定性が向上する。
以上のように構成された電子制御ユニット7のより具体的な制御的な仕組みを、図4に示された制御線図を用いて説明する。第1制御演算部751は、目標位置偏差:Δdと位置偏差:dとを入力パラメータとして、位置偏差:dを小さくするための第1操舵値を、PI制御を用いて演算出力する。PI制御に代えて、PID制御を用いてもよい。第2制御演算部752は、目標方位偏差:Δθと方位偏差:θとを入力パラメータとして、方位偏差:θを小さくするための仮の第2操舵値を、PI制御を用いて演算出力する。ここでも、PI制御に代えて、PID制御を用いてもよい。ただし、第2制御演算部752では、位置偏差が大きい場合には、位置偏差量に応じて比例的にまたは非線形的に、方位偏差に基づいて得られた仮の第2操舵値を低減して、第2操舵値として出力する。目標操舵演算部76は、第1制御演算部751から出力された第1操舵値と第2制御演算部752から出力された第2操舵値との加算値を目標操舵値として制御出力する。
操舵駆動制御部79は、フィードバック方式の操舵制御モジュールとして構成されている。入力された目標操舵値は実際の操舵角:Sθとの比較演算で得られた操舵角指令値:Sθ*を入力してPI制御を用いて前段出力値を求める。この前段出力値は、微分を用いた速度演算器:du/dtから出力される実際の操舵速度:Sωと比較演算され、その演算結果(操舵速度指令値:Sω*)を入力としてPI制御を用いて、操舵駆動信号が出力される。操舵駆動信号は、ドライバを介して操舵駆動部60を構成するモータを駆動して、前輪2aを操舵する。
尚、操舵駆動制御部79におけるPI制御は、PID制御に置き換えてもよい。
尚、操舵駆動制御部79におけるPI制御は、PID制御に置き換えてもよい。
[自動操舵制御系の変形例1]
図5には、図4で示された電子制御ユニット7の制御線図の変形例が示されている。図5の制御線図は、目標操舵演算部76に車速に応じて最終的に出力する目標操舵値が低減される機能が付加されている点において、図4と異なっている。
つまり、この変形例では、第1制御演算部751から出力された第1操舵値と第2制御演算部752から出力された第2操舵値との加算値をさらに、車速が大きくなるほど当該加算値を低減する演算機能が付加されている。
図5には、図4で示された電子制御ユニット7の制御線図の変形例が示されている。図5の制御線図は、目標操舵演算部76に車速に応じて最終的に出力する目標操舵値が低減される機能が付加されている点において、図4と異なっている。
つまり、この変形例では、第1制御演算部751から出力された第1操舵値と第2制御演算部752から出力された第2操舵値との加算値をさらに、車速が大きくなるほど当該加算値を低減する演算機能が付加されている。
[自動操舵制御系の変形例2]
図6には、図5で示された電子制御ユニット7の制御線図の変形例が示されている。図6の制御線図は、目標操舵演算部76に操舵上限設定部760が組み込まれ、最終的に出力される目標操舵値を上限クランプする機能が付加されている点において、図5と異なっている。
つまり、この変形例では、求められた目標操舵値を出力する手前で、車速に応じて変化するしきい値によって出力される最高目標操舵値が抑えこまれる。車速が大きいほど、出力される最高目標操舵値が小さくなるように設定されている。
図6には、図5で示された電子制御ユニット7の制御線図の変形例が示されている。図6の制御線図は、目標操舵演算部76に操舵上限設定部760が組み込まれ、最終的に出力される目標操舵値を上限クランプする機能が付加されている点において、図5と異なっている。
つまり、この変形例では、求められた目標操舵値を出力する手前で、車速に応じて変化するしきい値によって出力される最高目標操舵値が抑えこまれる。車速が大きいほど、出力される最高目標操舵値が小さくなるように設定されている。
〔別実施形態〕
(1)上述した実施形態では、操舵駆動制御部79は、実際の操舵角と操舵速度とをフィードバック量とする操舵制御モジュールとして構成された。しかしながら、本発明では、操舵駆動制御部79の制御構成を限定しているわけではなく、その他の公知の制御構成を採用することも可能である。
(2)上述した実施形態では、目標走行経路を直線と見なしていたが、目標走行経路が曲線であっても、本発明を適用することができる。
(3)上述した実施形態では、測位ユニット8は、衛星航法用モジュール81と慣性航法用モジュール82とで構成されていたが、衛星航法用モジュール81だけで構成することも可能である。
(4)上述した実施形態では、自動走行作業車両としてトラクタが例示されていたが、これに限定されるものではない。自動走行作業車両は、各種作業装置を装備し自動操舵走行が可能な、田植機、コンバインなどの他の農作業車両でもよい。また、本発明は、農作業車両だけでなく、他の作業車両にも適用可能である。
(1)上述した実施形態では、操舵駆動制御部79は、実際の操舵角と操舵速度とをフィードバック量とする操舵制御モジュールとして構成された。しかしながら、本発明では、操舵駆動制御部79の制御構成を限定しているわけではなく、その他の公知の制御構成を採用することも可能である。
(2)上述した実施形態では、目標走行経路を直線と見なしていたが、目標走行経路が曲線であっても、本発明を適用することができる。
(3)上述した実施形態では、測位ユニット8は、衛星航法用モジュール81と慣性航法用モジュール82とで構成されていたが、衛星航法用モジュール81だけで構成することも可能である。
(4)上述した実施形態では、自動走行作業車両としてトラクタが例示されていたが、これに限定されるものではない。自動走行作業車両は、各種作業装置を装備し自動操舵走行が可能な、田植機、コンバインなどの他の農作業車両でもよい。また、本発明は、農作業車両だけでなく、他の作業車両にも適用可能である。
60 :操舵駆動部
76 :目標操舵演算部
78 :車速算定部
79 :操舵駆動制御部
731 :自車位置算定部
732 :自車方位算定部
741 :位置偏差演算部
742 :方位偏差演算部
751 :第1制御演算部
752 :第2制御演算部
76 :目標操舵演算部
78 :車速算定部
79 :操舵駆動制御部
731 :自車位置算定部
732 :自車方位算定部
741 :位置偏差演算部
742 :方位偏差演算部
751 :第1制御演算部
752 :第2制御演算部
Claims (5)
- 設定された目標走行経路に沿って自動操舵走行する自動走行作業車両であって、
自車位置を算定する自車位置算定部と、
自車の走行方位を算定する自車方位算定部と、
前記目標走行経路に対する前記自車位置との間の位置偏差を演算する位置偏差演算部と、
前記目標走行経路の方位線と前記走行方位との間の方位偏差を演算する方位偏差演算部と、
前記位置偏差に基づいて偏差解消のために演算された第1操舵値、を出力する第1制御演算部と、
前記位置偏差と、前記位置偏差が大きくなるにしたがって減少傾向を示す重み係数を用いて調整された前記方位偏差とに基づいて、偏差解消のために演算された第2操舵値、を出力する第2制御演算部と、
前記第1操舵値と前記第2操舵値とに基づいて、前記目標走行経路に沿って走行するための目標操舵値を出力する目標操舵演算部と、
前記目標操舵値を入力として操舵駆動信号を出力する操舵駆動制御部と、
前記操舵駆動信号に基づいて操向輪の操舵を行う操舵駆動部と、
を備えた自動走行作業車両。 - 車速を算定する車速算定部が備えられ、
前記目標操舵演算部は、前記第1操舵値と前記第2操舵値とに基づいて前記目標操舵値を出力する際に、前記車速が大きくなるにしたがって減少傾向を示す調整係数を用いて、前記車速が大きい場合には前記目標操舵値を低減する請求項1に記載の自動走行作業車両。 - 車速を算定する車速算定部が備えられ、
前記目標操舵演算部は、前記目標操舵値に対する上限リミッタ機能を有し、前記車速に応じて上限リミット値が設定される請求項1又は2に記載の自動走行作業車両。 - 前記第2制御演算部における、前記位置偏差の大きさに依存する前記方位偏差の重み係数を用いた重みの低減度合は、変更可能である請求項1から3のいずれか一項に記載の自動走行作業車両。
- 前記目標操舵演算部は前記第1操舵値と前記第2操舵値とを加算演算して前記目標操舵値を出力する請求項1から4のいずれか一項に記載の自動走行作業車両。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/099,892 US10602654B2 (en) | 2016-05-30 | 2016-05-30 | Auto traveling work vehicle |
| EP16903934.4A EP3467606B1 (en) | 2016-05-30 | 2016-05-30 | Autonomous work vehicle |
| CN201680085801.XA CN109154817B (zh) | 2016-05-30 | 2016-05-30 | 自动行驶作业车辆 |
| PCT/JP2016/065918 WO2017208306A1 (ja) | 2016-05-30 | 2016-05-30 | 自動走行作業車両 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2016/065918 WO2017208306A1 (ja) | 2016-05-30 | 2016-05-30 | 自動走行作業車両 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017208306A1 true WO2017208306A1 (ja) | 2017-12-07 |
Family
ID=60478207
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/065918 WO2017208306A1 (ja) | 2016-05-30 | 2016-05-30 | 自動走行作業車両 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10602654B2 (ja) |
| EP (1) | EP3467606B1 (ja) |
| CN (1) | CN109154817B (ja) |
| WO (1) | WO2017208306A1 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113038821A (zh) * | 2018-10-30 | 2021-06-25 | 东京计器株式会社 | 误差修正装置 |
| EP3729935A4 (en) * | 2017-12-18 | 2021-09-01 | Kubota Corporation | AUTOPILOT SYSTEM AND AUTOPILOT PROCESS |
| WO2022107586A1 (ja) | 2020-11-18 | 2022-05-27 | 株式会社クボタ | 移動体、制御ユニット、および移動体の動作を制御する方法 |
| WO2022107588A1 (ja) | 2020-11-18 | 2022-05-27 | 株式会社クボタ | 移動体、制御ユニット、データ生成ユニット、移動体の動作を制御する方法、およびデータを生成する方法 |
| EP4019295A1 (en) | 2020-12-22 | 2022-06-29 | Kubota Corporation | Agricultural machine, and system and method for controlling an agricultural machine |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3729936B1 (en) * | 2017-12-18 | 2024-01-10 | Kubota Corporation | Work vehicle and tractor |
| EP3744161B1 (en) * | 2018-01-23 | 2024-07-03 | Kubota Corporation | Work vehicle |
| US11154008B2 (en) * | 2018-08-20 | 2021-10-26 | Cnh Industrial America Llc | System and method for steering an agricultural harvester |
| US10696324B2 (en) * | 2018-10-15 | 2020-06-30 | Caterpillar Paving Products Inc. | Controlling machine operation including machine turning radius |
| CN109900273B (zh) * | 2019-02-28 | 2021-02-09 | 北京航天自动控制研究所 | 一种室外移动机器人导引方法及导引系统 |
| JP7346980B2 (ja) * | 2019-07-30 | 2023-09-20 | マツダ株式会社 | 車両制御システム |
| WO2021035682A1 (zh) * | 2019-08-30 | 2021-03-04 | 深圳市大疆创新科技有限公司 | 可移动平台及其行驶控制方法和系统、控制设备 |
| CN112650206A (zh) * | 2019-10-10 | 2021-04-13 | 苏州宝时得电动工具有限公司 | 智能割草机行走的控制方法及智能割草机 |
| US10935986B1 (en) * | 2019-11-28 | 2021-03-02 | Institute Of Automation, Chinese Academy Of Sciences | Gliding depth control method, system and device for biomimetic gliding robotic dolphin |
| JP7497669B2 (ja) * | 2020-10-28 | 2024-06-11 | 井関農機株式会社 | 自動制御コンバイン |
| CN112533143A (zh) * | 2020-12-02 | 2021-03-19 | 董树波 | 基于智能手机连接的地毯方向定位方法及其系统 |
| US12108696B2 (en) * | 2021-12-23 | 2024-10-08 | Cnh Industrial America Llc | Agricultural system and method for determining an as-driven path of an agricultural work vehicle |
| CN116022235B (zh) * | 2023-03-29 | 2023-06-16 | 北京理工大学深圳汽车研究院(电动车辆国家工程实验室深圳研究院) | 车辆转向控制方法、装置及车辆 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05197423A (ja) * | 1992-01-17 | 1993-08-06 | Honda Motor Co Ltd | 移動体の制御装置 |
| JP2001350521A (ja) * | 2000-06-07 | 2001-12-21 | Nissan Motor Co Ltd | 車両の自動操舵装置 |
| JP2002333922A (ja) * | 2001-05-10 | 2002-11-22 | Isuzu Motors Ltd | 自動操舵装置 |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63153605A (ja) | 1986-12-17 | 1988-06-27 | Kubota Ltd | 自動走行作業車の操向制御装置 |
| JPH07223600A (ja) * | 1994-02-14 | 1995-08-22 | Mitsubishi Heavy Ind Ltd | 宇宙往還機の姿勢制御装置 |
| JP3281188B2 (ja) | 1994-08-09 | 2002-05-13 | ヤマハ発動機株式会社 | 無人車 |
| JP2000514199A (ja) * | 1997-06-28 | 2000-10-24 | レオポルト・コスタール・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング・ウント・コンパニー・コマンディトゲゼルシャフト | 車両のハンドルの絶対角度位置を測定する方法及び光電式のステアリング角度センサ |
| JP3483855B2 (ja) | 2001-01-16 | 2004-01-06 | 川崎重工業株式会社 | 車両系の走行制御方法及び装置 |
| KR100580628B1 (ko) * | 2003-11-08 | 2006-05-16 | 삼성전자주식회사 | 이동물체의 진행방향 추정 방법 및 시스템 |
| JP2006268499A (ja) * | 2005-03-24 | 2006-10-05 | Funai Electric Co Ltd | 走行機および自走式掃除機。 |
| JP4195897B2 (ja) * | 2006-05-26 | 2008-12-17 | オリエンタルモーター株式会社 | ステッピングモータの制御装置 |
| JP2008131880A (ja) | 2006-11-28 | 2008-06-12 | Yanmar Co Ltd | 農用作業車 |
| JP4920393B2 (ja) | 2006-12-08 | 2012-04-18 | 本田技研工業株式会社 | 車両の操舵制御装置 |
| JP5045108B2 (ja) | 2007-01-11 | 2012-10-10 | トヨタ自動車株式会社 | 走行支援装置 |
| CN101118421A (zh) * | 2007-09-13 | 2008-02-06 | 北京航空航天大学 | 基于自适应蚁群智能的非线性pid控制参数整定方法 |
| JP5389360B2 (ja) | 2008-01-09 | 2014-01-15 | 富士重工業株式会社 | 車線追従制御装置および車線追従制御方法 |
| CN101221447A (zh) * | 2008-01-18 | 2008-07-16 | 中国农业大学 | 一种机械自动转向控制方法 |
| JP5359085B2 (ja) | 2008-03-04 | 2013-12-04 | 日産自動車株式会社 | 車線維持支援装置及び車線維持支援方法 |
| JP2010238217A (ja) * | 2009-03-09 | 2010-10-21 | Yaskawa Electric Corp | 移動ロボットの自己位置同定方法及び移動ロボット |
| US8510027B2 (en) * | 2009-06-11 | 2013-08-13 | Toyota Jidosha Kabushiki Kaisha | Method for judging vehicle traveling position and vehicle traveling position judgment device |
| JP2010152923A (ja) * | 2010-03-04 | 2010-07-08 | ▲吉▼川 英之 | リモートコントロール装置 |
| CN102147262A (zh) * | 2011-01-11 | 2011-08-10 | 北京理工大学 | 用于纠正导航偏差的方法、及采用该方法的导航显示器 |
| US9020757B2 (en) * | 2012-05-11 | 2015-04-28 | Trimble Navigation Limited | Path planning autopilot |
| JP5977203B2 (ja) | 2012-12-21 | 2016-08-24 | 株式会社日本自動車部品総合研究所 | 車両制御装置 |
| US9715231B2 (en) * | 2013-09-04 | 2017-07-25 | Kubota Corporation | Agriculture support system |
| JP5939238B2 (ja) * | 2013-11-29 | 2016-06-22 | トヨタ自動車株式会社 | 車両用操舵制御装置 |
| CN103744428B (zh) * | 2014-01-17 | 2016-03-09 | 哈尔滨工程大学 | 一种基于邻域智能水滴算法的水面无人艇路径规划方法 |
| CN104536453B (zh) * | 2014-11-28 | 2017-08-04 | 深圳一电航空技术有限公司 | 飞行器的控制方法及装置 |
| CN104881025B (zh) * | 2015-04-10 | 2018-11-27 | 北京科技大学 | 一种地下矿用车辆的反应式导航控制方法 |
| CN105007012B (zh) * | 2015-07-16 | 2017-12-15 | 湖北三江航天万峰科技发展有限公司 | 一种车载转台控制系统及方法 |
-
2016
- 2016-05-30 WO PCT/JP2016/065918 patent/WO2017208306A1/ja unknown
- 2016-05-30 EP EP16903934.4A patent/EP3467606B1/en active Active
- 2016-05-30 US US16/099,892 patent/US10602654B2/en active Active
- 2016-05-30 CN CN201680085801.XA patent/CN109154817B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05197423A (ja) * | 1992-01-17 | 1993-08-06 | Honda Motor Co Ltd | 移動体の制御装置 |
| JP2001350521A (ja) * | 2000-06-07 | 2001-12-21 | Nissan Motor Co Ltd | 車両の自動操舵装置 |
| JP2002333922A (ja) * | 2001-05-10 | 2002-11-22 | Isuzu Motors Ltd | 自動操舵装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3467606A4 * |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3729935A4 (en) * | 2017-12-18 | 2021-09-01 | Kubota Corporation | AUTOPILOT SYSTEM AND AUTOPILOT PROCESS |
| US11317557B2 (en) | 2017-12-18 | 2022-05-03 | Kubota Corporation | Automatic steering system and automatic steering method |
| CN113038821A (zh) * | 2018-10-30 | 2021-06-25 | 东京计器株式会社 | 误差修正装置 |
| EP3874926A4 (en) * | 2018-10-30 | 2021-12-29 | Tokyo Keiki Inc. | Error correction apparatus |
| CN113038821B (zh) * | 2018-10-30 | 2022-12-06 | 东京计器株式会社 | 误差修正装置 |
| WO2022107586A1 (ja) | 2020-11-18 | 2022-05-27 | 株式会社クボタ | 移動体、制御ユニット、および移動体の動作を制御する方法 |
| WO2022107588A1 (ja) | 2020-11-18 | 2022-05-27 | 株式会社クボタ | 移動体、制御ユニット、データ生成ユニット、移動体の動作を制御する方法、およびデータを生成する方法 |
| EP4019295A1 (en) | 2020-12-22 | 2022-06-29 | Kubota Corporation | Agricultural machine, and system and method for controlling an agricultural machine |
| US11917934B2 (en) | 2020-12-22 | 2024-03-05 | Kubota Corporation | Agricultural machine, and system and method for controlling agricultural machine |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3467606A4 (en) | 2020-01-29 |
| EP3467606B1 (en) | 2022-07-20 |
| CN109154817A (zh) | 2019-01-04 |
| US20190133023A1 (en) | 2019-05-09 |
| US10602654B2 (en) | 2020-03-31 |
| CN109154817B (zh) | 2021-09-24 |
| EP3467606A1 (en) | 2019-04-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6420173B2 (ja) | 自動走行圃場作業車両 | |
| WO2017208306A1 (ja) | 自動走行作業車両 | |
| US11317557B2 (en) | Automatic steering system and automatic steering method | |
| US11052943B2 (en) | System and method for controlling a vehicle | |
| JP6528786B2 (ja) | 車両の運転支援装置 | |
| US10401856B2 (en) | Vehicle travel control apparatus | |
| JP6437640B2 (ja) | 自律走行車の誘導制御システム | |
| US10427712B2 (en) | Automatic driving system | |
| EP2421742B1 (en) | Steering control device of autonomous vehicle, autonomous vehicle having the same and steering control method of autonomous vehicle | |
| JP7072496B2 (ja) | 自動走行作業車のための制御装置 | |
| JP2019038535A (ja) | 自動走行圃場作業車両 | |
| US11603131B2 (en) | Control device and turning device | |
| KR20190009018A (ko) | 자율주행 농업기계의 작업안전을 위한 속도제어장치 및 방법 | |
| JP2020164160A (ja) | 自動走行圃場作業車両 | |
| JP2019053470A (ja) | 作業車両用の自律走行システム | |
| JP2020087340A (ja) | 自動走行作業車のための制御装置 | |
| CN114859936A (zh) | 路径跟踪控制方法、装置、系统和车辆 | |
| US20240182107A1 (en) | Steering angle error monitoring | |
| JP2020080743A (ja) | 車両の姿勢推定装置 | |
| JP2023046039A (ja) | 制御方法、制御システム、自動制御車両 | |
| CN116278818A (zh) | 用于控制履带式车辆运动的方法和装置及履带式车辆 | |
| JP2023046040A (ja) | 制御方法、制御システム、自動制御車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16903934 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2016903934 Country of ref document: EP Effective date: 20190102 |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |