WO2017065106A1 - 遠隔操縦型無人飛行機および遠隔操縦型無人飛行機の操縦引継方法 - Google Patents
遠隔操縦型無人飛行機および遠隔操縦型無人飛行機の操縦引継方法 Download PDFInfo
- Publication number
- WO2017065106A1 WO2017065106A1 PCT/JP2016/079928 JP2016079928W WO2017065106A1 WO 2017065106 A1 WO2017065106 A1 WO 2017065106A1 JP 2016079928 W JP2016079928 W JP 2016079928W WO 2017065106 A1 WO2017065106 A1 WO 2017065106A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- control
- flight
- control signal
- terminal
- control terminal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63H—TOYS, e.g. TOPS, DOLLS, HOOPS OR BUILDING BLOCKS
- A63H30/00—Remote-control arrangements specially adapted for toys, e.g. for toy vehicles
- A63H30/02—Electrical arrangements
- A63H30/04—Electrical arrangements using wireless transmission
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63H—TOYS, e.g. TOPS, DOLLS, HOOPS OR BUILDING BLOCKS
- A63H33/00—Other toys
- A63H33/22—Optical, colour, or shadow toys
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C13/00—Control systems or transmitting systems for actuating flying-control surfaces, lift-increasing flaps, air brakes, or spoilers
- B64C13/02—Initiating means
- B64C13/16—Initiating means actuated automatically, e.g. responsive to gust detectors
- B64C13/20—Initiating means actuated automatically, e.g. responsive to gust detectors using radiated signals
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C27/00—Rotorcraft; Rotors peculiar thereto
- B64C27/04—Helicopters
- B64C27/08—Helicopters with two or more rotors
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/08—Control of attitude, i.e. control of roll, pitch, or yaw
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/221—Remote-control arrangements
- G05D1/227—Handing over between remote control and on-board control; Handing over between remote control arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/10—Rotorcrafts
- B64U10/13—Flying platforms
- B64U10/16—Flying platforms with five or more distinct rotor axes, e.g. octocopters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2201/00—UAVs characterised by their flight controls
- B64U2201/20—Remote controls
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2109/00—Types of controlled vehicles
- G05D2109/20—Aircraft, e.g. drones
- G05D2109/25—Rotorcrafts
- G05D2109/254—Flying platforms, e.g. multicopters
Definitions
- the present invention relates to a remote control type unmanned airplane and a method for taking over control of a remote control type unmanned airplane. More specifically, the present invention can be controlled by a plurality of control terminals, and is suitable for taking over control using a plurality of control terminals. The present invention relates to a remotely controlled unmanned airplane and a method for taking over control of a remotely controlled unmanned airplane.
- Patent Document 1 discloses a method of taking over control of a remotely controlled unmanned airplane using a plurality of control terminals.
- the problem to be solved by the present invention is to provide a remote control type unmanned airplane that can smoothly take over control by using a plurality of control terminals, and a control takeover method for a remote control type unmanned airplane.
- a remotely controlled unmanned airplane is a remotely controlled unmanned airplane that can be controlled by a plurality of control terminals, and flight control from one control terminal of the plurality of control terminals.
- a procedure for waiting for reception of the next flight control signal from another control terminal by transitioning to a hovering state in which the flight continues at that location in the air and reception of the next flight control signal And a procedure for shifting from the hovering state to the next flight state.
- control lock mechanism that does not accept flight control, and the hovering state It is preferable to have a procedure in which the control lock mechanism is released when the process shifts to step S2.
- the operation indicating that it is in a state of waiting for reception of a next flight control signal is a light emitting operation by a light emitting means installed in the aircraft or a rotation operation of a part or all of the aircraft.
- a procedure for performing a light emission operation by the light emitting means installed on the aircraft when receiving a flight control signal from the one control terminal, and a change in the light emission operation when receiving the next flight control signal is preferable to have the procedure to do.
- a method for taking over a remotely controlled unmanned airplane is a method for taking over a remotely operated unmanned airplane using a plurality of control terminals, and is controlled among the plurality of control terminals.
- the remote control unmanned airplane is configured to shift to a hovering state in which the flight continues at that place in the air.
- the gist of the present invention is to shift from the hovering state to the next flight state by receiving the next flight control signal.
- the remotely controlled unmanned airplane further includes a procedure for receiving a control takeover command from the one control terminal, and receives a flight control signal from the one control terminal after receiving the control takeover command. It is preferable to adopt a configuration that shifts to a hovering state in which the flight continues at that place in the air when it disappears.
- the one control terminal uses the hovering state when the flight control signal from the one control terminal is not received, and the other control terminal. Therefore, it is possible to take over the operation smoothly by using a plurality of operation terminals.
- it further has a procedure of receiving a control takeover command from one control terminal, and after receiving a control takeover command, when a flight control signal from one control terminal is not received, shift to a hovering state. If a procedure for waiting for reception of the next flight control signal from another control terminal is executed, the flight control signal from one control terminal has been intentionally cut off due to takeover, or It is possible to distinguish whether it was unintentionally interrupted for some reason. Then, when the flight control signal from the control terminal is interrupted, the fail safe function of returning to the takeoff point can be made compatible with the takeover operation, and the fail safe function can be added.
- control lock mechanism when a control signal is received from one control terminal, the control lock mechanism has a procedure that does not accept control from another control terminal. If the mechanism has a procedure to be released, even if a control signal from another control terminal is received before taking over, it can be determined to be invalid, so control can be taken over safely and reliably. be able to.
- FIG. 1st embodiment It is a flowchart of the control taking over operation by the control taking over means concerning a 2nd embodiment.
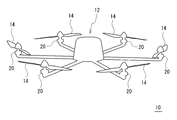
- FIG. 1 is a schematic diagram of a remotely controlled unmanned aerial vehicle according to an embodiment of the present invention.
- FIG. 2 is a block diagram of the remotely controlled unmanned aerial vehicle shown in FIG.
- FIG. 3 is a block diagram of an example of a control terminal used to control the remotely controlled unmanned airplane shown in FIG.
- a remotely operated unmanned aerial vehicle (hereinafter, simply referred to as an unmanned aerial vehicle 10) according to an embodiment of the present invention includes a main body 12 and a plurality of rotor blades 14 connected to the main body 12. Yes.
- the unmanned airplane 10 is a so-called multicopter.
- the main body 12 is provided with a control device 16, a power source 18, a plurality of motors 20, and a plurality of motor controllers 22.
- the power source 18 is constituted by a battery and is connected to the control device 16.
- the motor controller 22 is connected to the control device 16 and the motor 20 and controls the rotation of the motor 20 at a speed instructed by the control device 16.
- the motor 20 is connected to the motor controller 22 and the rotor blade 14, transmits the rotational power controlled by the motor controller 22 to the rotor blade 14, and rotates the rotor blade 14 at a predetermined rotational speed.
- the number of motor controllers 22 and the number of motors 20 is the same as that of the rotor blades 14.
- Each motor controller 22 is connected to a different motor 20, and each motor 20 is connected to a different rotor blade 14.
- the rotor blades 14 are configured to be separately controllable.
- the control device 16 includes a processing unit 24, a storage unit 26, a communication unit 28, a sensor unit 30, and a GPS receiving unit 32.
- the processing unit 24 is connected to each unit of the storage unit 26, the communication unit 28, the sensor unit 30, and the GPS receiving unit 32 through a communication network.
- the processing unit 24 is a central processing unit (CPU), and the storage unit 26 is a RAM / ROM.
- the control device 16 communicates with the control terminal via the communication unit 28.
- the sensor unit 30 generally includes an acceleration sensor, a gyro sensor (angular velocity sensor) atmospheric pressure sensor, a geomagnetic sensor (electronic compass), and the like.
- the control device 16 independently acquires the current position including the latitude, longitude, and altitude of the unmanned airplane 10 by the sensor unit 30 and the GPS receiving unit 32 (current position acquisition unit).
- the control terminal 40 includes a processing unit 42, a storage unit 44, a communication unit 46, and a switch 48.
- the processing unit 42 is connected to each unit of the storage unit 44, the communication unit 46, and the switch 48 via a communication network.
- the storage unit 26 of the control device 16 of the unmanned airplane 10 stores an attitude control program in which an attitude control algorithm during the flight of the unmanned airplane 10 is implemented.
- the control device 16 controls the attitude of the unmanned airplane 10 during flight based on this attitude control program and information acquired from the sensor unit 30 and the GPS receiver 32 (current position acquisition means).
- the storage unit 26 stores a control takeover means that is a program for taking over control between a plurality of control terminals. In the following, embodiments of the control takeover means and the control takeover method using the control takeover means will be described.
- the control handover means according to the first embodiment is in a hovering state in which the flight is continued at the place in the air when the flight control signal from one of the plurality of control terminals is not received. And a procedure for waiting for reception of the next flight control signal from another control terminal and a procedure for shifting from the hovering state to the next flight state upon reception of the next flight control signal.
- the control transfer means according to the first embodiment controls the flight from the control terminal A that is operating.
- a procedure for waiting for reception of the next flight control signal from the control terminal B by transitioning to a hovering state in which the flight continues at that place in the air, And a procedure for transitioning to the next flight state.
- FIG. 4 shows a flowchart of the control takeover operation by the control takeover means according to the first embodiment.
- the pilot A takes over from the pilot of the pilot terminal A to the pilot of the pilot terminal B by the pilot B.
- the pilot A activates the control terminal A, activates the control device 16 of the unmanned airplane 10, and starts flying the unmanned airplane 10.
- the pilot A controls the control terminal A, and after flying the unmanned airplane 10 to the place where the control is taken over, stops the transmission of the flight control signal from the control terminal A.
- the unmanned airplane 10 shifts to the control takeover mode, hoveres and stands by at that place in the air, and another control by another pilot B Wait for reception of the next flight control signal from terminal B.
- Pilot A communicates to other pilot B that he / she wants to take over control. In response to this, the pilot B activates the control terminal B and starts to control the unmanned airplane 10.
- a plurality of control terminals are previously connected to the unmanned airplane 10 so that the unmanned airplane 10 can be controlled without being influenced by other control terminals (interference, etc.) even if other control terminals are mixed. Therefore, it is preferable to perform pairing by encryption or the like. As a result, the unmanned airplane 10 cannot be controlled by a device other than a plurality of predesignated control terminals, and interference with other control terminals can be prevented.
- the unmanned airplane 10 When maneuvering the unmanned airplane 10 using a plurality of control terminals, it is excellent in terms of cost and control to use a plurality of control terminals that transmit the same control signal. Therefore, it is preferable that the unmanned airplane 10 is operated using a plurality of control terminals that transmit the same control signal. In this case, the unmanned airplane 10 (the control device 16) cannot distinguish whether the control terminal being operated is the control terminal A or the control terminal B, for example. In order to make the unmanned airplane 10 (the control device 16) distinguish the control terminal, it is preferable to embed information specific to the control terminal in a part of the signal transmitted from the control terminal.
- a message indicating that the pilot A wants the pilot B to take over the pilot can be transmitted using a communication means such as a mobile phone.
- a method of sending some sign via the unmanned airplane 10 may be used. For example, when the state changes to the hovering state, an operation indicating that the pilot A is in a state of waiting for reception of the next flight control signal from the other control terminal B according to a command from the control terminal A by the operator A is performed on the unmanned airplane 10. The unmanned airplane 10 is automatically actuated to indicate that it is in a state of waiting for reception of the next flight control signal from the other control terminal B in response to the transition to the hovering state.
- the unmanned airplane 10 is a procedure in which an operation indicating that the unmanned airplane 10 is in a state of waiting for reception of the next flight control signal from another control terminal when the control handover means further shifts to the hovering state.
- Have Operations that indicate that the next flight control signal is waiting to be received include light emission operations (lighting / flashing, etc.) by light emitting means such as LEDs installed on the aircraft, and rotation of all or part of the aircraft Is mentioned.
- the unmanned airplane 10 further includes a procedure for executing a light emission operation by the light emitting means installed in the fuselage when the flight control means receives a flight control signal from the control terminal, and the next flight control signal. And a procedure for changing the light emission operation when the signal is received.
- Examples of the change in the light emission operation include a change from a state in which the light emitting unit does not emit light to a state in which light is emitted, a change in emission color, a change from lighting to blinking or blinking to lighting. If an allowance (for example, embedding information specific to the control terminal in a part of the flight control signal) for allowing the unmanned airplane 10 (the control device 16) to distinguish the control terminal is used, the control is performed from the control terminal A to the control terminal B.
- the light emission operation can be changed, for example, the light emission color of the light emitting means such as an LED installed in the airframe is changed.
- control from one control terminal to another control terminal is performed using the hovering state in response to not receiving the flight control signal from one control terminal. Therefore, it is not necessary to simultaneously stop the operation by one control terminal and start the control by another control terminal. Then, because the timing of control takeover is matched, the start of control by another control terminal precedes the stop of control by one control terminal, and the control by one control terminal and the control by another control terminal interfere with each other It can be suppressed. In addition, even if there is a blank time that is not being operated by any control terminal, the planned hovering state is maintained, so unintended movement such as a crash due to being not operated by any control terminal Is also suppressed.
- the maneuver can be taken over smoothly using a plurality of maneuvering terminals.
- it is allowed to generate a blank time that is not being piloted by any of the pilot terminals.
- the allowance procedure can be simplified by allowing a blank time to occur when taking over the maneuver. In other words, it is not necessary to use a protocol or a receiving device that does not cause competition when using a plurality of control terminals. Even when a plurality of control terminals that can cause interference if the control signals are transmitted at the same time, interference can be avoided due to the blank time, and control can be taken over smoothly.
- by allowing a blank time to occur when taking over control it is possible to take over control using a plurality of control terminals that transmit the same control signal.
- the stop of the flight control signal transmission from the control terminal A can be considered both intentionally for taking over control and when the unmanned airplane 10 is out of control of the control terminal A.
- the unmanned airplane 10 may be provided with a fail-safe function.
- the fail-safe function is a function in which the unmanned airplane 10 automatically returns to the takeoff point when the flight control signal is no longer received from the control terminal.
- the unmanned airplane 10 is provided with a fail-safe function, the next flight control from another control terminal by hovering is performed for a predetermined time before the fail-safe function is activated after the flight control signal is not received from the control terminal. It is preferable to have a procedure for continuing the waiting for reception of the signal, and to ensure that the takeover of the control can be executed by receiving the flight control signal from the control terminal B within a predetermined time (for example, 1 minute).
- the unmanned airplane 10 shifts to the control takeover mode, hovering at that place in the air and waiting. Since it is supposed to wait for the next flight control signal from the other control terminal B, interference will occur between a plurality of control terminals paired with the unmanned airplane 10 if the procedure is followed. Can be avoided. However, for example, when another pilot B does not follow the procedure, and the other pilot B transmits a control signal from the pilot terminal B while the pilot A is operating the pilot terminal A. Therefore, there is an interference between the operation by the control terminal A and the control by the control terminal B.
- the unmanned airplane 10 may have a control lock mechanism according to a procedure that does not accept control from another control terminal when receiving a control signal from one control terminal.
- the control signal from the control terminal B can be set to be ignored during the control by the control terminal A. That is, when the control terminal A has not abandoned control, control by the control terminal B occurs, and even if this is received, the permanent residence terminal A continues to control as intended when the interference state is canceled. be able to.
- a control lock may be automatically applied in response to reception of a control signal from one control terminal, or a signal for performing control lock is transmitted from the control terminal and this signal is received. It may be configured to receive the control lock.
- the control lock signal is transmitted from the control terminal by using a switch provided in the control terminal, which is used as a control lock command switch, and is turned on to transmit it to the unmanned airplane 10. Can do.
- the transmitted signal includes the state of the control lock command.
- the switch for the control lock command the same switch as the switch for transmitting the standby state by the previous hovering may be used, or a switch provided separately may be used.
- the unmanned airplane 10 shifts to the control takeover mode, and hovers at the place in the air to enter the standby state.
- the control lock may be automatically released in response to entering, or a signal for releasing the control lock is transmitted from one control terminal, and the control lock is received in response to receiving this signal. You may comprise so that it may be cancelled
- the transmitted signal includes the state of the control lock release command.
- the control takeover means according to the second embodiment further includes a procedure for receiving a control takeover command from the one control terminal that is being operated.
- the control takeover means according to the second embodiment includes a procedure for receiving a control takeover command from one piloting terminal being operated, and a flight control signal from one control terminal after receiving the control takeover command. If you do not receive the next flight control signal to wait for the next flight control signal from the other control terminal to enter the hovering state to continue flying in that place in the air, and the next flight control signal reception And a procedure for transitioning to the next flight state.
- the control transfer means is the control transfer from the control terminal A that is operating. From the control terminal B, the procedure for receiving the command and when the flight control signal from the control terminal A is not received after the control takeover command is received and the control terminal B shifts to the hovering state in which the flight continues in that place in the air. And a procedure for waiting for reception of the next flight control signal and a procedure for shifting from the hovering state to the next flight state upon reception of the next flight control signal.
- FIG. 5 shows a flowchart of the control takeover operation by the control takeover means according to the second embodiment.
- the pilot A takes over from the pilot of the pilot terminal A to the pilot of the pilot terminal B by the pilot B.
- the pilot A activates the control terminal A, activates the control device 16 of the unmanned airplane 10, and starts flying the unmanned airplane 10.
- the pilot A steers the control terminal A, flies the unmanned airplane 10 to a place where the control is taken over, and then transmits a control takeover command to the unmanned airplane 10.
- the unmanned airplane 10 shifts to the control takeover mode.
- the pilot A stops transmitting the flight control signal from the pilot terminal A.
- the unmanned airplane 10 hovers and waits at that place in the air, and the next flight control signal from the other control terminal B by the other pilot B Wait for reception.
- Pilot A informs other pilot B that he / she wants to take over control.
- the pilot B activates the control terminal B and starts to control the unmanned airplane 10.
- the unmanned airplane 10 cancels the control takeover command.
- the unmanned airplane 10 returns to the normal flight state and follows the operation from the control terminal B by the operator B.
- the control takeover command can be transmitted from the control terminal A to the unmanned airplane 10 by turning on the switch provided in the control terminal A as a control takeover command switch, for example.
- the transmitted signal includes the state of the control takeover command.
- the switch for the control takeover command the same switch as the switch for transmitting the standby state by the previous hovering or the switch for the control lock command may be used, or a switch provided separately may be used. .
- control hand-over means when the control is handed over by the control hand-over means, the control can be smoothly handed over using a plurality of control terminals in the same manner as the control hand-over by the control hand-over means according to the first embodiment. Then, it is allowed that a blank time not being operated by any control terminal occurs.
- the pilot A transmits a control takeover command from the control terminal A to the unmanned airplane 10, and the unmanned airplane 10 Includes procedures for receiving commands.
- the unmanned airplane 10 has been intentionally stopped to transmit the flight control signal from the control terminal A for taking over the control, or the unmanned airplane 10 is out of control of the control terminal A. It can be distinguished whether it is a thing.
- the unmanned airplane 10 can wait for hovering without taking over the failsafe function of the unmanned airplane 10 having the failsafe function.
- the unmanned airplane 10 is forced to wait (hover)
- unintended movement such as a fail-safe function
- the fail-safe function and the takeover operation can be made compatible, and the fail-safe function can be added.
- the control handover means according to the second embodiment may further include a procedure for canceling the control handover command when the next flight control signal is received.
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Computer Networks & Wireless Communication (AREA)
- Toys (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015202508A JP6224050B2 (ja) | 2015-10-14 | 2015-10-14 | 遠隔操縦型無人飛行機および遠隔操縦型無人飛行機の操縦引継方法 |
| JP2015-202508 | 2015-10-14 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017065106A1 true WO2017065106A1 (ja) | 2017-04-20 |
Family
ID=58518162
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/079928 Ceased WO2017065106A1 (ja) | 2015-10-14 | 2016-10-07 | 遠隔操縦型無人飛行機および遠隔操縦型無人飛行機の操縦引継方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6224050B2 (enExample) |
| WO (1) | WO2017065106A1 (enExample) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107770166A (zh) * | 2017-10-13 | 2018-03-06 | 深圳市富斯科技有限公司 | 一种控制权转移控制方法、系统和无人机 |
| CN110999217A (zh) * | 2018-08-21 | 2020-04-10 | 深圳市大疆创新科技有限公司 | 控制功能的设置方法、控制设备和控制系统 |
| CN111051198A (zh) * | 2018-02-13 | 2020-04-21 | 乐天株式会社 | 无人飞行器控制系统、无人飞行器控制方法、及程序 |
| CN114489100A (zh) * | 2022-01-18 | 2022-05-13 | 中国地质大学(北京) | 基于姿态同步的超视距无人机遥控系统 |
| JP2023031070A (ja) * | 2021-08-24 | 2023-03-08 | 国立大学法人徳島大学 | 信号切替装置 |
| WO2024088112A1 (zh) * | 2022-10-25 | 2024-05-02 | 亿航智能设备(广州)有限公司 | 一种多飞控备份切换方法、设备及计算机可读存储介质 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI668544B (zh) * | 2017-09-14 | 2019-08-11 | 圓台科技有限公司 | 遠端控制無人機的方法 |
| JP6945005B2 (ja) * | 2017-10-30 | 2021-10-06 | 株式会社Nttドコモ | 飛行制御システム |
| JP6586257B1 (ja) * | 2018-08-16 | 2019-10-02 | 楽天株式会社 | 無人航空機制御システム、無人航空機制御方法、及びプログラム |
| JP6906024B2 (ja) * | 2019-08-29 | 2021-07-21 | 楽天グループ株式会社 | 無人移動機管理システム、無人移動機管理方法、及びプログラム |
| JPWO2023089960A1 (enExample) * | 2021-11-17 | 2023-05-25 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10108984A (ja) * | 1996-10-04 | 1998-04-28 | Yoshinori Kanto | 無人ヘリコプターの操縦切換方法及び無人ヘリコプター |
| JP2004359071A (ja) * | 2003-06-04 | 2004-12-24 | Fuji Heavy Ind Ltd | 無人航空機操縦システム |
-
2015
- 2015-10-14 JP JP2015202508A patent/JP6224050B2/ja not_active Expired - Fee Related
-
2016
- 2016-10-07 WO PCT/JP2016/079928 patent/WO2017065106A1/ja not_active Ceased
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10108984A (ja) * | 1996-10-04 | 1998-04-28 | Yoshinori Kanto | 無人ヘリコプターの操縦切換方法及び無人ヘリコプター |
| JP2004359071A (ja) * | 2003-06-04 | 2004-12-24 | Fuji Heavy Ind Ltd | 無人航空機操縦システム |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107770166A (zh) * | 2017-10-13 | 2018-03-06 | 深圳市富斯科技有限公司 | 一种控制权转移控制方法、系统和无人机 |
| CN107770166B (zh) * | 2017-10-13 | 2020-07-31 | 深圳市富斯科技有限公司 | 一种控制权转移控制方法、系统和无人机 |
| CN111051198A (zh) * | 2018-02-13 | 2020-04-21 | 乐天株式会社 | 无人飞行器控制系统、无人飞行器控制方法、及程序 |
| CN110999217A (zh) * | 2018-08-21 | 2020-04-10 | 深圳市大疆创新科技有限公司 | 控制功能的设置方法、控制设备和控制系统 |
| CN110999217B (zh) * | 2018-08-21 | 2021-08-13 | 深圳市大疆创新科技有限公司 | 控制功能的设置方法、控制设备和控制系统 |
| JP2023031070A (ja) * | 2021-08-24 | 2023-03-08 | 国立大学法人徳島大学 | 信号切替装置 |
| JP7304563B2 (ja) | 2021-08-24 | 2023-07-07 | 国立大学法人徳島大学 | 信号切替装置 |
| CN114489100A (zh) * | 2022-01-18 | 2022-05-13 | 中国地质大学(北京) | 基于姿态同步的超视距无人机遥控系统 |
| CN114489100B (zh) * | 2022-01-18 | 2023-07-04 | 中国地质大学(北京) | 基于姿态同步的超视距无人机遥控系统 |
| WO2024088112A1 (zh) * | 2022-10-25 | 2024-05-02 | 亿航智能设备(广州)有限公司 | 一种多飞控备份切换方法、设备及计算机可读存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6224050B2 (ja) | 2017-11-01 |
| JP2017074826A (ja) | 2017-04-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6224050B2 (ja) | 遠隔操縦型無人飛行機および遠隔操縦型無人飛行機の操縦引継方法 | |
| US11235860B2 (en) | Control inceptor management system | |
| EP3223097B1 (en) | Unmanned aerial vehicle flight control system | |
| JP4304009B2 (ja) | 無人航空機操縦システム | |
| JP2012214216A5 (enExample) | ||
| KR101720157B1 (ko) | 무인항공기를 위한 통신 장치 및 방법 | |
| JP6767802B2 (ja) | 無人飛行体及びその飛行制御方法 | |
| KR101694115B1 (ko) | 무인항공기를 위한 통신 장치 및 방법 | |
| CN105836107A (zh) | 在电传操纵飞行器系统中用于配平控制的飞行器、系统和方法 | |
| KR20150021293A (ko) | 무인항공기의 무선제어시스템 | |
| KR20170074453A (ko) | 근거리 무선통신망 기반의 드론과 드로간 자동 충돌방지 및 회피 시스템 | |
| RU2643300C2 (ru) | Способ управления аэродинамическими средствами летательного аппарата, соответствующая система управления и летательный аппарат, снабженный такой системой управления | |
| JP2020078949A (ja) | 回転翼航空機及び回転翼航空機の制御方法 | |
| JP2004175209A (ja) | 無人航空機 | |
| CN105807787A (zh) | 一种无人飞行器的控制方法及装置 | |
| KR102635254B1 (ko) | 무인 비행체 운영 시스템 | |
| KR101506805B1 (ko) | 터치패널을 이용한 회전익 항공기 자동조종장치 및 자동조종방법 | |
| JP2020095563A (ja) | 無人航空機システム | |
| JP2017119477A (ja) | ブイ探索システム及びブイ探索方法 | |
| CN111445684B (zh) | 一种飞行器超视距遥控系统 | |
| JPH0880898A (ja) | 無人航空機の自動制御システム | |
| JPH10108984A (ja) | 無人ヘリコプターの操縦切換方法及び無人ヘリコプター | |
| TWI645384B (zh) | 通訊控制裝置 | |
| JP6983262B2 (ja) | 飛行装置の操縦システム | |
| KR20170055789A (ko) | 무인 비행체 제어 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16855360 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 32PN | Ep: public notification in the ep bulletin as address of the adressee cannot be established |
Free format text: NOTING OF LOSS OF RIGHTS PURSUANT TO RULE 112(1) EPC (EPO FORM 1205A DATED 13.07.2018) |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 16855360 Country of ref document: EP Kind code of ref document: A1 |