WO2017043377A1 - トルクベクタリング装置 - Google Patents
トルクベクタリング装置 Download PDFInfo
- Publication number
- WO2017043377A1 WO2017043377A1 PCT/JP2016/075371 JP2016075371W WO2017043377A1 WO 2017043377 A1 WO2017043377 A1 WO 2017043377A1 JP 2016075371 W JP2016075371 W JP 2016075371W WO 2017043377 A1 WO2017043377 A1 WO 2017043377A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- differential
- sun gear
- gear
- torque vectoring
- torque
- Prior art date
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K7/00—Disposition of motor in, or adjacent to, traction wheel
- B60K7/0007—Disposition of motor in, or adjacent to, traction wheel the motor being electric
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K1/00—Arrangement or mounting of electrical propulsion units
- B60K1/02—Arrangement or mounting of electrical propulsion units comprising more than one electric motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K17/00—Arrangement or mounting of transmissions in vehicles
- B60K17/04—Arrangement or mounting of transmissions in vehicles characterised by arrangement, location, or kind of gearing
- B60K17/043—Transmission unit disposed in on near the vehicle wheel, or between the differential gear unit and the wheel
- B60K17/046—Transmission unit disposed in on near the vehicle wheel, or between the differential gear unit and the wheel with planetary gearing having orbital motion
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H48/00—Differential gearings
- F16H48/06—Differential gearings with gears having orbital motion
- F16H48/10—Differential gearings with gears having orbital motion with orbital spur gears
- F16H48/11—Differential gearings with gears having orbital motion with orbital spur gears having intermeshing planet gears
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H48/00—Differential gearings
- F16H48/36—Differential gearings characterised by intentionally generating speed difference between outputs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K1/00—Arrangement or mounting of electrical propulsion units
- B60K2001/001—Arrangement or mounting of electrical propulsion units one motor mounted on a propulsion axle for rotating right and left wheels of this axle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/80—Control of differentials
- B60Y2300/82—Torque vectoring
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/80—Differentials
- B60Y2400/804—Torque vectoring arrangements
Definitions
- the present invention relates to a torque vectoring device.
- Patent Document 1 a torque vector that improves the turning performance of a vehicle by distributing the drive torque output from the drive source to the left and right drive wheels by the motor torque output by the torque vectoring motor.
- a ring device has been proposed.
- This torque vectoring device is composed of a first planetary gear mechanism that functions as a differential mechanism, a second planetary gear mechanism that functions as a torque distribution mechanism, a third planetary gear mechanism, and a torque vectoring motor. ing.
- the torque vectoring motor When the vehicle is traveling straight, the torque vectoring motor is controlled so that the drive torque output from the drive source to the left and right drive wheels is equal.
- the torque vectoring motor does not rotate when the vehicle is traveling straight. For this reason, a current flows only in a stator having a specific phase among the stators of the torque vectoring motor. As a result, the stator having a specific phase deteriorates due to heat generation.
- the present invention has been made to solve the above-described problems, and prevents the torque vectoring motor from rotating and preventing the stator of the torque vectoring motor from deteriorating even when the vehicle is running straight.
- a torque vectoring device capable of
- a torque vectoring device includes a torque vectoring motor, a first sun gear, and a plurality of gears that mesh with the first sun gear.
- a plurality of second planetary gears the torque vectoring motor being coupled, a plurality of the first planetary gears and a common carrier that pivotally supports the plurality of second planetary gears, an input member to which driving torque is input, and the first A first output member to which one sun gear is connected and one of the left and right drive wheels is connected;
- the torque vectoring motor rotates even when the vehicle is traveling straight. For this reason, when the torque vectoring motor is controlled so that the driving torque output from the driving source to the left and right driving wheels is equalized when the vehicle is traveling straight, the torque vectoring motor does not rotate, so that the torque vector It is possible to prevent a current from flowing only to a stator having a specific phase among the stators of the ring motor. As a result, deterioration of the stator having a specific phase is prevented.
- the vehicle drive device 100 includes a drive motor generator 1, a torque vectoring device 10, an inverter device 15, a battery 16, and a control unit 17.
- the vehicle V has a left drive wheel 21L, a right drive wheel 21R, a left drive shaft 22L, and a right drive shaft 22R.
- the drive motor generator 1 outputs a motor torque Tm (drive torque) for driving the vehicle V.
- the drive motor generator 1 includes a stator 1a fixed to the vehicle V and a rotor 1b rotatably provided on the inner peripheral side of the stator 1a.
- the drive motor generator 1 has a role as a motor that generates a driving force by supplying power and a role as a generator that generates electric power by converting kinetic energy into electric energy.
- the battery 16 is a secondary battery that stores electric power, and supplies electric power to a stator 1a of the drive motor generator 1 and a torque vectoring stator 2a of a torque vectoring motor 2 described later via an inverter device 15.
- the inverter device 15 boosts the voltage of the power supplied from the battery 16 based on a command from the control unit 17 and supplies the boosted voltage to the stator 1a of the drive motor generator 1 and the torque vectoring stator 2a of the torque vectoring motor 2.
- the drive motor generator 1 and the torque vectoring motor 2 are driven. Further, the inverter device 15 steps down the voltage of the electric power generated in the drive motor generator 1 and the torque vectoring motor 2 based on a command from the control unit 17 and charges the battery 16.
- the torque vectoring device 10 variably distributes the motor torque Tm (drive torque) output from the drive motor generator 1 to the left and right drive wheels 21L and 21R, and absorbs the rotational speed difference between the left and right drive wheels 21L and 21R. To do.
- the torque vectoring device 10 includes a first planetary gear mechanism 11, a second planetary gear mechanism 12, a differential 13, and a torque vectoring motor 2.
- the first planetary gear mechanism 11, the second planetary gear mechanism 12, and the differential 13 are coaxially provided in series in the axial direction.
- the torque vectoring motor 2 is for variably distributing the motor torque Tm (drive torque) output from the drive motor generator 1 to the left and right drive wheels 21L, 21R.
- the torque vectoring motor 2 includes a torque vectoring stator 2a fixed to the vehicle V, and a torque vectoring rotor 2b rotatably provided on the inner peripheral side of the torque vectoring stator 2a.
- the torque vectoring motor 2 has a role as a motor that generates a driving force by supplying electric power and a role as a generator that generates electric power by converting kinetic energy into electric energy.
- the first planetary gear mechanism 11 includes a first sun gear S1, a plurality of first planetary gears P1, and a common carrier Cc.
- the plurality of first planetary gears P1 are provided on the outer peripheral side of the first sun gear S1 so as to mesh with the first sun gear S1.
- the common carrier Cc supports a plurality of first planetary gears P1.
- the second planetary gear mechanism 12 is provided adjacent to the first planetary gear mechanism 11.
- the second planetary gear mechanism 12 includes a second sun gear S2, a plurality of second planetary gears P2, and a common carrier Cc.
- the gear diameter (pitch circle diameter, reference circle diameter) of the second sun gear S2 is larger than the gear diameter of the first sun gear S1.
- the plurality of second planetary gears P2 are provided on the outer peripheral side of the second sun gear S2 so as to mesh with the second sun gear S2.
- the second planetary gear P2 is formed coaxially and integrally with the first planetary gear P1.
- the gear diameter of the second planetary gear P2 is smaller than the gear diameter of the first planetary gear P1.
- the common carrier Cc pivotally supports a plurality of second planetary gears P2.
- the common carrier Cc pivotally supports the plurality of first planetary gears P1 and the plurality of second planetary gears P2.
- a torque vectoring rotor 2b of the torque vectoring motor 2 is
- the differential 13 absorbs a difference in rotational speed between the left and right drive wheels 21L and 21R.
- the differential 13 is provided adjacent to the second planetary gear mechanism 12.
- the differential 13 is a double pinion planetary gear mechanism.
- the differential 13 includes a differential sun gear Sd, a first differential planetary gear Pd1, a second differential planetary gear Pd2, a differential carrier Cd, and a differential ring gear Rd.
- the differential sun gear Sd (corresponding to the first output member described in the claims) and the first sun gear S1 are connected to each other. Further, the differential drive gear Sd is connected to the left drive wheel 21L via the left drive shaft 22L.
- the plurality of first differential planetary gears Pd1 are provided on the outer peripheral side of the differential sun gear Sd so as to mesh with the differential sun gear Sd.
- the plurality of second differential planetary gears Pd2 are respectively provided on the outer peripheral side of the plurality of first differential planetary gears Pd1 so as to mesh with the first differential planetary gear Pd1.
- a differential carrier Cd (corresponding to a second output member described in claims) supports a plurality of first differential planetary gears Pd1 and a plurality of second differential planetary gears Pd2.
- the differential carrier Cd and the second sun gear S2 are connected to each other.
- the differential carrier Cd is connected to the right drive wheel 21R via the right drive shaft 22R.
- the differential ring gear Rd (corresponding to the input member described in the claims) is provided on the outer peripheral side of the plurality of second differential planetary gears Pd2, and the differential inner gear Rda that meshes with the plurality of second differential planetary gears Pd2 on the inner periphery thereof. Is formed.
- the number of teeth ZRda of the differential inner gear Rda is twice the number of teeth ZSd of the differential sun gear Sd.
- the differential ring gear Rd is connected to the rotor 1b of the drive motor generator 1. With such a configuration, the motor torque Tm (drive torque) from the drive motor generator 1 is input to the diff ring gear Rd.
- FIG. 2 (Explanation of velocity diagram of torque vectoring device of first embodiment) Next, a velocity diagram of the torque vectoring device 10 according to the first embodiment will be described with reference to FIG.
- the vertical axis represents the rotational speed of each element shown in FIG.
- the region above 0 shown in FIG. 2 is forward rotation.
- Each symbol in FIG. 2 is as follows.
- ZS1 Number of teeth of first sun gear S1
- ZS2 Number of teeth of second sun gear S2
- ZP1 Number of teeth of first planetary gear
- P1 Number of teeth of second planetary gear P2
- ZSd Number of teeth of differential sun gear Sd
- ZRda Number of teeth of differential inner gear Rda
- N21L Rotational speed N21R of the left driving wheel 21L: Rotational speed Nmd of the right driving wheel 21R: Rotational speed Nmt of the drive motor generator 1: Rotational speed T21L of the torque vectoring motor 2: Torque T21R of the left driving wheel 21L: Right Torque Tmd of drive wheel 21R: Torque Tmt of drive motor generator 1: Torque of torque vectoring motor 2
- a straight line L1 represents the relationship between the rotation speeds of the first sun gear S1, the second sun gear S2, and the common carrier Cc, and the rotation speeds of the differential sun gear Sd, the diff ring gear Rd, and the differential carrier Cd.
- a solid line indicates a state where the vehicle V is traveling straight
- a broken line indicates a state where a rotational speed difference is generated between the left and right drive wheels 21 ⁇ / b> L and 21 ⁇ / b> R by the torque vectoring device 10.
- the differential 13 is a double pinion type, and the number of teeth ZRda of the differential inner gear Rda is twice the number of teeth ZSd of the differential sun gear Sd. Therefore, in FIG. 2, the rotational speeds of the first sun gear S1 and the differential sun gear Sd are represented. Between the vertical line representing the rotational speed of the second sun gear S2 and the differential carrier Cd and the vertical line representing the rotational speed of the differential ring gear Rd, and the interval a between the vertical line and the vertical line representative of the rotational speed of the differential ring gear Rd. The intervals a are equal.
- the torque vectoring motor 2 is rotating even when the vehicle V is traveling straight.
- the control unit 17 outputs a command to the inverter device 15 to increase or decrease the torque Tmt of the torque vectoring motor 2.
- the torque T21L of the left drive wheel 21L and the T21R of the right drive wheel 21R change, and a difference occurs in the motor torque (drive torque) input to the left and right drive wheels 21L, 21R.
- the rotational speed Nmt of the torque vectoring motor 2 increases, the straight line L1 tilts so that the right side is on the upper side.
- the rotation speed N21L of the left drive wheel 21L decreases and the rotation speed N21R of the right drive wheel 21R increases.
- control unit 17 prevents the torque vectoring motor from generating a rotational speed difference between the left and right drive wheels 21L and 21R, that is, so that the straight line L1 in FIG. By controlling 2, the differential 13 can be differentially locked.
- the torque vectoring device 20 of the second embodiment has a single pinion planetary gear mechanism 19, a differential 13, and a torque vectoring motor 2.
- the single pinion planetary gear mechanism 19 and the differential 13 are adjacently provided coaxially and in series in the axial direction.
- the single pinion planetary gear mechanism 19 includes a sun gear S, a plurality of planetary gears P, a carrier C, and a ring gear R.
- a torque vectoring rotor 2 b of the torque vectoring motor 2 is connected to the sun gear S.
- the plurality of planetary gears P are provided in mesh with the sun gear S on the outer peripheral side of the sun gear S.
- the carrier C pivotally supports a plurality of planetary gears P.
- the ring gear R is provided on the outer peripheral side of the plurality of planetary gears P.
- An inner gear Ra that meshes with a plurality of planetary gears P is formed on the inner periphery of the ring gear R.
- the differential 13 has the same structure as the differential 13 of the torque vectoring device 10 of the first embodiment.
- the differential carrier Cd and the ring gear R are connected to each other.
- the differential sun gear Sd and the sun gear S are connected to each other.
- FIG. 4 (Explanation of velocity diagram of torque vectoring device of second embodiment) Next, a velocity diagram of the torque vectoring device 20 according to the second embodiment will be described with reference to FIG.
- the vertical axis represents the rotational speed of each element shown in FIG.
- the region above 0 shown in FIG. 4 is normal rotation.
- Each symbol in FIG. 4 is as follows.
- ZS Number of teeth of sun gear S ZR: Number of teeth of inner gear Ra
- ZSd Number of teeth of differential sun gear Sd
- ZRda Number of teeth of differential inner gear Rda
- N21L Rotational speed N21R of left drive wheel 21L: Rotational speed Nmd of right drive wheel 21R : Rotational speed Nmt of drive motor generator 1: rotational speed T21L of torque vectoring motor 2: torque T21R of left drive wheel 21L: torque Tmd of right drive wheel 21R: torque Tmt of drive motor generator 1: torque vectoring motor 2 torque
- the straight line L2 represents the relationship between the rotational speeds of the sun gear S, the carrier C, and the ring gear R, and the relationship between the rotational speeds of the differential sun gear Sd, the differential ring gear Rd, and the differential carrier Cd.
- the solid line indicates a state where the vehicle V is traveling straight
- the broken line indicates a state where a rotational speed difference is generated between the left and right drive wheels 21 ⁇ / b> L and 21 ⁇ / b> R by the torque vectoring device 20 of the second embodiment. Yes.
- the torque vectoring motor 2 is rotating even when the vehicle V is traveling straight.
- the control unit 17 outputs a command to the inverter device 15 to increase or decrease the torque Tmt of the torque vectoring motor 2. Then, the inclination of the straight line L2 changes (shown by the broken line in FIG. 4), and the rotation speed N21L of the left drive wheel 21L and the rotation speed N21R of the right drive wheel 21R change.
- the torque vectoring device 10 of the first embodiment includes a torque vectoring motor 2, a first sun gear S1, a plurality of first planetary gears P1 provided on the outer peripheral side of the first sun gear S1, and meshing with the first sun gear S1.
- a second sun gear S2 having a larger gear diameter than the first sun gear S1 and a plurality of second sun gears provided on the outer peripheral side of the second sun gear S2, meshed with the second sun gear S2, and coaxially and integrally with the first planetary gear P1.
- the planetary gear P2 and the torque vectoring motor 2 are connected, and a common carrier Cc that pivotally supports the plurality of first planetary gears P1 and the plurality of second planetary gears P2 and a differential ring gear Rd (motor torque Tm (drive torque)) is input.
- Input member) and the first sun gear S1 are connected, and the left drive wheel 21L is connected.
- the torque vectoring device 10 of the first embodiment has a vertical line indicating the rotational speed Nmt of the torque vectoring motor 2 and the rotational speed Nmd of the drive motor generator 1 in the speed diagram shown in FIG.
- the distance from the vertical line indicating becomes larger.
- the slope of the straight line L1 in FIG. 2 changes with the rotational speed Nmd of the drive motor generator 1 as a fulcrum (shown by the broken line in FIG. 2), so that the left drive wheel 21L and the right drive wheel 21R respectively
- the difference in motor torque (driving torque) input to can be increased.
- the torque vectoring device 20 of the second embodiment includes a torque vectoring motor 2, a sun gear S to which the torque vectoring motor 2 is coupled, and a plurality of planetary gears P that are provided on the outer peripheral side of the sun gear S and mesh with the sun gear S.
- a carrier C that pivotally supports a plurality of planetary gears P, a ring gear R that is provided on the outer peripheral side of the plurality of planetary gears P and meshes with the plurality of planetary gears P, and a ring gear R (input member) that receives motor torque (drive torque).
- the torque vectoring device 20 of the second embodiment configured as described above includes only a single pinion planetary gear mechanism 19 in addition to the differential 13. For this reason, the dimension of the axial direction of the torque vectoring apparatus 20 of 2nd embodiment can be reduced compared with the torque vectoring apparatus comprised by the multi-row planetary gear mechanism other than the differential 13.
- the differential 13 is provided on the outer peripheral side of the differential sun gear Sd and the differential sun gear Sd, and is provided on the outer peripheral side of the first differential planetary gear Pd1 and the first differential planetary gear Pd1 that mesh with the differential sun gear Sd.
- the drive motor generator 1 is the drive source that outputs the drive torque to the differential ring Rd of the differential 13.
- the drive source that outputs the drive torque to the diff ring gear Rd may be an embodiment that is an engine.
- the drive motor generator 1 and the torque vectoring motor 2 may be motors that do not have a power generation function.
- the left drive wheel 21L which is one drive wheel
- the right drive which is the other drive wheel
- the wheel 21R is rotationally connected.
- the right drive wheel 21R which is one drive wheel
- the left drive wheel 21L which is the other drive wheel
- the differential 13 is a double pinion planetary gear mechanism.
- the differential 13 may be one using a bevel gear.
- SYMBOLS 2 ... Torque vectoring motor, 10 ... Torque vectoring apparatus of 1st embodiment, 13 ... Differential, 20 ... Torque vectoring apparatus of 2nd embodiment, 21L ... Left drive wheel, 21R ... Right drive wheel, S ... Sun gear , S1 ... first sun gear, S2 ... second sun gear, Sd ... differential sun gear (first output member), P ... planetary gear, P1 ... first planetary gear, P2 ... second planetary gear, Pd1 ... first differential planetary gear, Pd2 ... second Differential planetary gear, Cd ... differential carrier (second output member), Cc ... common carrier, Rd ... differential ring gear (input member)
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Retarders (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
車両が直進している状態であっても、トルクベクタリングモータが回転して、トルクベクタリングモータのステータの劣化を防止することができるトルクベクタリング装置を提供する。トルクベクタリング装置は、トルクベクタリングモータ(2)と、左駆動輪(21L)が連結された第一サンギヤ(S1)と、第一プラネタリギヤ(P1)と、第二サンギヤ(S2)と、第一プラネタリギヤ(P1)と同軸に且つ一体に形成された複数の第二プラネタリギヤ(P2)と、トルクベクタリングモータ(2)が連結され、複数の第一プラネタリギヤ(P1)及び複数の第二プラネタリギヤ(P2)を軸支する共通キャリア(Cc)と、駆動トルクが入力されるデフリングギヤ(Rd)と、左駆動輪(21L)が連結されたデフサンギヤ(Sd)と、第二サンギヤ(S2)が連結されるとともに右駆動輪(21R)が連結されたデフキャリア(Cd)と、を有する。
Description
本発明は、トルクベクタリング装置に関する。
従来から、特許文献1に示されるように、トルクベクタリングモータが出力するモータトルクによって、駆動源から左右の駆動輪に出力される駆動トルクを分配して、車両の旋回性能を向上させるトルクベクタリング装置が提案されている。このトルクベクタリング装置は、デファレンシャル機構としての役割を果たす第一遊星歯車機構と、トルク配分機構としての役割を果たす第二遊星歯車機構、第三遊星歯車機構、及びトルクベクタリングモータとから構成されている。
車両の直進時には、駆動源から左右の駆動輪に出力される駆動トルクが均等となるようにトルクベクタリングモータが制御される。特許文献1に示されるトルクベクタリング装置では、車両が直進している状態では、トルクベクタリングモータは、回転しない。このため、トルクベクタリングモータのステータのうち特定の位相のステータのみに電流が流れる。この結果、特定の位相のステータが発熱により劣化する。
本発明は、上述した問題を解消するためになされたもので、車両が直進している状態であっても、トルクベクタリングモータが回転して、トルクベクタリングモータのステータの劣化を防止することができるトルクベクタリング装置を提供する。
上記の課題を解決するため、請求項1に係るトルクベクタリング装置の発明は、トルクベクタリングモータと、第一サンギヤと、前記第一サンギヤの外周側に設けられ、前記第一サンギヤと噛み合う複数の第一プラネタリギヤと、前記第一サンギヤよりもギヤ径が大きい第二サンギヤと、前記第二サンギヤの外周側に設けられ、前記第二サンギヤと噛み合い前記第一プラネタリギヤと同軸に且つ一体に形成された複数の第二プラネタリギヤと、前記トルクベクタリングモータが連結され、複数の前記第一プラネタリギヤ及び複数の前記第二プラネタリギヤを軸支する共通キャリアと、駆動トルクが入力される入力部材と、前記第一サンギヤが連結されるとともに左右の駆動輪のうち一方の前記駆動輪が連結された第一出力部材と、前記第二サンギヤが連結されるとともに前記左右の駆動輪のうち他方側の前記駆動輪が連結された第二出力部材と、を備え、前記左右の駆動輪の回転速度差を吸収するデファレンシャルと、を有する。
このようにトルクベクタリング装置を構成することによって、車両が直進している状態であっても、トルクベクタリングモータが回転する。このため、車両の直進時に、駆動源から左右の駆動輪に出力される駆動トルクを均等となるようにトルクベクタリングモータが制御される際に、トルクベクタリングモータが回転しないことによって、トルクベクタリングモータのステータのうち特定の位相のステータのみに電流が流れることが防止される。この結果、特定の位相のステータの劣化が防止される。
(車両用駆動装置)
以下に図1を用いて、第一実施形態のトルクベクタリング装置10(以下、適宜、トルクベクタリング装置10と略す)が搭載された車両Vの車両用駆動装置100について説明する。車両用駆動装置100は、駆動モータジェネレータ1、トルクベクタリング装置10、インバータ装置15、バッテリ16、及び制御部17を有している。車両Vは、左駆動輪21L、右駆動輪21R、左ドライブシャフト22L、及び右ドライブシャフト22Rを有している。
以下に図1を用いて、第一実施形態のトルクベクタリング装置10(以下、適宜、トルクベクタリング装置10と略す)が搭載された車両Vの車両用駆動装置100について説明する。車両用駆動装置100は、駆動モータジェネレータ1、トルクベクタリング装置10、インバータ装置15、バッテリ16、及び制御部17を有している。車両Vは、左駆動輪21L、右駆動輪21R、左ドライブシャフト22L、及び右ドライブシャフト22Rを有している。
駆動モータジェネレータ1は、車両Vを駆動するためのモータトルクTm(駆動トルク)を出力するものである。駆動モータジェネレータ1は、車両Vに固定されたステータ1aと、ステータ1aの内周側に、回転可能に設けられたロータ1bとから構成されている。駆動モータジェネレータ1は、電力の供給により駆動力を発生させるモータとしての役割と、運動エネルギーを電気エネルギーに変換して電力を発電する発電機としての役割を有する。
バッテリ16は、電力を蓄電する二次電池であり、インバータ装置15を介して、駆動モータジェネレータ1のステータ1aや後述するトルクベクタリングモータ2のトルクベクタリングステータ2aに電力を供給する。インバータ装置15は、制御部17からの指令に基づいて、バッテリ16から供給された電力の電圧を昇圧して駆動モータジェネレータ1のステータ1aやトルクベクタリングモータ2のトルクベクタリングステータ2aに供給し、駆動モータジェネレータ1及びトルクベクタリングモータ2を駆動する。また、インバータ装置15は、制御部17からの指令に基づいて、駆動モータジェネレータ1及びトルクベクタリングモータ2において発電された電力の電圧を降圧して、バッテリ16に充電する。
(トルクベクタリング装置)
トルクベクタリング装置10は、駆動モータジェネレータ1が出力したモータトルクTm(駆動トルク)を、左右の駆動輪21L、21Rに可変に配分するとともに、左右の駆動輪21L、21Rの回転速度差を吸収するものである。トルクベクタリング装置10は、第一遊星歯車機構11、第二遊星歯車機構12、デファレンシャル13、及びトルクベクタリングモータ2を有している。第一遊星歯車機構11、第二遊星歯車機構12、及びデファレンシャル13は、同軸に軸線方向に直列に設けられている。
トルクベクタリング装置10は、駆動モータジェネレータ1が出力したモータトルクTm(駆動トルク)を、左右の駆動輪21L、21Rに可変に配分するとともに、左右の駆動輪21L、21Rの回転速度差を吸収するものである。トルクベクタリング装置10は、第一遊星歯車機構11、第二遊星歯車機構12、デファレンシャル13、及びトルクベクタリングモータ2を有している。第一遊星歯車機構11、第二遊星歯車機構12、及びデファレンシャル13は、同軸に軸線方向に直列に設けられている。
トルクベクタリングモータ2は、駆動モータジェネレータ1が出力したモータトルクTm(駆動トルク)を、左右の駆動輪21L、21Rに可変に配分させるためのものである。トルクベクタリングモータ2は、車両Vに固定されたトルクベクタリングステータ2aと、トルクベクタリングステータ2aの内周側に、回転可能に設けられたトルクベクタリングロータ2bとから構成されている。トルクベクタリングモータ2は、電力の供給により駆動力を発生させるモータとしての役割と、運動エネルギーを電気エネルギーに変換して電力を発電する発電機としての役割を有する。
第一遊星歯車機構11は、第一サンギヤS1、複数の第一プラネタリギヤP1、共通キャリアCcとから構成されている。複数の第一プラネタリギヤP1は、第一サンギヤS1の外周側に、第一サンギヤS1と噛み合って設けられている。共通キャリアCcは、複数の第一プラネタリギヤP1を軸支している。
第二遊星歯車機構12は、第一遊星歯車機構11に隣接して設けられている。第二遊星歯車機構12は、第二サンギヤS2、複数の第二プラネタリギヤP2、及び共通キャリアCcとから構成されている。第二サンギヤS2のギヤ径(ピッチ円直径、基準円直径)は、第一サンギヤS1のギヤ径よりも大きい。複数の第二プラネタリギヤP2は、第二サンギヤS2の外周側に、第二サンギヤS2と噛み合って設けられている。第二プラネタリギヤP2は、第一プラネタリギヤP1と同軸に且つ一体に形成されている。第二プラネタリギヤP2のギヤ径は、第一プラネタリギヤP1のギヤ径よりも小さい。共通キャリアCcは、複数の第二プラネタリギヤP2を軸支している。このように、共通キャリアCcが、複数の第一プラネタリギヤP1と複数の第二プラネタリギヤP2を軸支している。共通キャリアCcには、トルクベクタリングモータ2のトルクベクタリングロータ2bが連結されている。
デファレンシャル13は、左右の駆動輪21L、21Rの回転速度差を吸収するものである。デファレンシャル13は、第二遊星歯車機構12に隣接して設けられている。デファレンシャル13は、ダブルピニオン遊星歯車機構である。デファレンシャル13は、デフサンギヤSd、第一デフプラネタリギヤPd1、第二デフプラネタリギヤPd2、デフキャリアCd、及びデフリングギヤRdとから構成されている。
デフサンギヤSd(特許請求の範囲に記載の第一出力部材に相当)と第一サンギヤS1とは互いに連結されている。また、デフサンギヤSdは、左ドライブシャフト22Lを介して左駆動輪21Lが連結されている。複数の第一デフプラネタリギヤPd1は、デフサンギヤSdの外周側に、デフサンギヤSdと噛み合って設けられている。複数の第二デフプラネタリギヤPd2は、それぞれ、複数の第一デフプラネタリギヤPd1の外周側に、第一デフプラネタリギヤPd1と噛み合って設けられている。
デフキャリアCd(特許請求の範囲に記載の第二出力部材に相当)は、複数の第一デフプラネタリギヤPd1及び複数の第二デフプラネタリギヤPd2を軸支している。デフキャリアCdと第二サンギヤS2は互いに連結されている。また、デフキャリアCdは、右ドライブシャフト22Rを介して、右駆動輪21Rに連結されている。
デフリングギヤRd(特許請求の範囲に記載の入力部材に相当)は、複数の第二デフプラネタリギヤPd2の外周側に設けられ、その内周に複数の第二デフプラネタリギヤPd2と噛み合うデフインナーギヤRdaが形成されている。デフインナーギヤRdaの歯数ZRdaは、デフサンギヤSdの歯数ZSdの2倍となっている。デフリングギヤRdは、駆動モータジェネレータ1のロータ1bが連結されている。このような構成によって、デフリングギヤRdには、駆動モータジェネレータ1からのモータトルクTm(駆動トルク)が入力される。
(第一実施形態のトルクベクタリング装置の速度線図の説明)
次に、図2を用いて、第一実施形態のトルクベクタリング装置10の速度線図について説明する。図2において、縦軸は、図1に示すそれぞれの要素の回転速度である。図2に示す0よりも上方の領域は正回転である。
図2における各記号は、以下のとおりである。
ZS1:第一サンギヤS1の歯数
ZS2:第二サンギヤS2の歯数
ZP1:第一プラネタリギヤP1の歯数
ZP2:第二プラネタリギヤP2の歯数
ZSd:デフサンギヤSdの歯数
ZRda:デフインナーギヤRdaの歯数
N21L:左駆動輪21Lの回転速度
N21R:右駆動輪21Rの回転速度
Nmd:駆動モータジェネレータ1の回転速度
Nmt:トルクベクタリングモータ2の回転速度
T21L:左駆動輪21Lのトルク
T21R:右駆動輪21Rのトルク
Tmd:駆動モータジェネレータ1のトルク
Tmt:トルクベクタリングモータ2のトルク
次に、図2を用いて、第一実施形態のトルクベクタリング装置10の速度線図について説明する。図2において、縦軸は、図1に示すそれぞれの要素の回転速度である。図2に示す0よりも上方の領域は正回転である。
図2における各記号は、以下のとおりである。
ZS1:第一サンギヤS1の歯数
ZS2:第二サンギヤS2の歯数
ZP1:第一プラネタリギヤP1の歯数
ZP2:第二プラネタリギヤP2の歯数
ZSd:デフサンギヤSdの歯数
ZRda:デフインナーギヤRdaの歯数
N21L:左駆動輪21Lの回転速度
N21R:右駆動輪21Rの回転速度
Nmd:駆動モータジェネレータ1の回転速度
Nmt:トルクベクタリングモータ2の回転速度
T21L:左駆動輪21Lのトルク
T21R:右駆動輪21Rのトルク
Tmd:駆動モータジェネレータ1のトルク
Tmt:トルクベクタリングモータ2のトルク
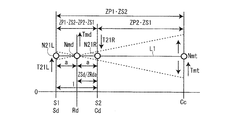
図2において、直線L1は、第一サンギヤS1、第二サンギヤS2、及び共通キャリアCcの回転速度の関係や、デフサンギヤSd、デフリングギヤRd、及びデフキャリアCdの回転速度の関係を表している。図2において、実線は車両Vが直進している状態を示し、破線はトルクベクタリング装置10によって、左右の駆動輪21L、21Rに回転速度差が生じている状態を示している。
デファレンシャル13はダブルピニオン式であり、デフインナーギヤRdaの歯数ZRdaは、デフサンギヤSdの歯数ZSdの2倍となっているので、図2において、第一サンギヤS1及びデフサンギヤSdの回転速度を表す縦線とデフリングギヤRdの回転速度を表す縦線との間の間隔aと、第二サンギヤS2及びデフキャリアCdの回転速度を表す縦線とデフリングギヤRdの回転速度を表す縦線との間の間隔aは等しくなっている。
図2に示すように、車両Vが直進している状態でも、トルクベクタリングモータ2は回転している。左右の駆動輪21L、21Rに入力されるモータトルクに差を生じさせる場合には、制御部17はインバータ装置15に指令を出力して、トルクベクタリングモータ2のトルクTmtを増減する。すると、左駆動輪21LのトルクT21L及び右駆動輪21RのT21Rが変化して、左右の駆動輪21L、21Rに入力されるモータトルク(駆動トルク)に差が生じる。例えば、トルクベクタリングモータ2の回転速度Nmtの回転速度が速くなると、直線L1右側が上側となるように傾く。この結果、左駆動輪21Lの回転速度N21Lが低下するとともに、右駆動輪21Rの回転速度N21Rが上昇する。
なお、制御部17は、車両Vが直進している状態で、左右の駆動輪21L、21Rに回転数差を発生させないように、つまり、図2の直線L1が傾かないようにトルクベクタリングモータ2を制御することにより、デファレンシャル13をデフロックさせることができる。
(第二実施形態のトルクベクタリング装置)
図3を用いて、第二実施形態のトルクベクタリング装置20について、第一実施形態のトルクベクタリング装置10と異なる点について説明する。第二実施形態のトルクベクタリング装置20は、シングルピニオン遊星歯車機構19、デファレンシャル13、及びトルクベクタリングモータ2を有している。シングルピニオン遊星歯車機構19とデファレンシャル13は、隣接して、同軸に軸線方向に直列に設けられている。
図3を用いて、第二実施形態のトルクベクタリング装置20について、第一実施形態のトルクベクタリング装置10と異なる点について説明する。第二実施形態のトルクベクタリング装置20は、シングルピニオン遊星歯車機構19、デファレンシャル13、及びトルクベクタリングモータ2を有している。シングルピニオン遊星歯車機構19とデファレンシャル13は、隣接して、同軸に軸線方向に直列に設けられている。
シングルピニオン遊星歯車機構19は、サンギヤS、複数のプラネタリギヤP、キャリアC、及びリングギヤRとから構成されている。サンギヤSには、トルクベクタリングモータ2のトルクベクタリングロータ2bが連結されている。複数のプラネタリギヤPは、サンギヤSの外周側に、サンギヤSと噛み合って設けられている。キャリアCは、複数のプラネタリギヤPを軸支している。リングギヤRは、複数のプラネタリギヤPの外周側に設けられている。リングギヤRの内周には、複数のプラネタリギヤPと噛み合うインナーギヤRaが形成されている。
デファレンシャル13は、第一実施形態のトルクベクタリング装置10のデファレンシャル13と同一の構造である。デフキャリアCdとリングギヤRは、互いに連結されている。デフサンギヤSdとサンギヤSは、互いに連結されている。
(第二実施形態のトルクベクタリング装置の速度線図の説明)
次に、図4を用いて、第二実施形態のトルクベクタリング装置20の速度線図について説明する。図4において、縦軸は、図3に示すそれぞれの要素の回転速度である。図4に示す0よりも上方の領域は正回転である。
図4における各記号は、以下のとおりである。
ZS:サンギヤSの歯数
ZR:インナーギヤRaの歯数
ZSd:デフサンギヤSdの歯数
ZRda:デフインナーギヤRdaの歯数
N21L:左駆動輪21Lの回転速度
N21R:右駆動輪21Rの回転速度
Nmd:駆動モータジェネレータ1の回転速度
Nmt:トルクベクタリングモータ2の回転速度
T21L:左駆動輪21Lのトルク
T21R:右駆動輪21Rのトルク
Tmd:駆動モータジェネレータ1のトルク
Tmt:トルクベクタリングモータ2のトルク
次に、図4を用いて、第二実施形態のトルクベクタリング装置20の速度線図について説明する。図4において、縦軸は、図3に示すそれぞれの要素の回転速度である。図4に示す0よりも上方の領域は正回転である。
図4における各記号は、以下のとおりである。
ZS:サンギヤSの歯数
ZR:インナーギヤRaの歯数
ZSd:デフサンギヤSdの歯数
ZRda:デフインナーギヤRdaの歯数
N21L:左駆動輪21Lの回転速度
N21R:右駆動輪21Rの回転速度
Nmd:駆動モータジェネレータ1の回転速度
Nmt:トルクベクタリングモータ2の回転速度
T21L:左駆動輪21Lのトルク
T21R:右駆動輪21Rのトルク
Tmd:駆動モータジェネレータ1のトルク
Tmt:トルクベクタリングモータ2のトルク
図4において、直線L2は、サンギヤS、キャリアC、及びリングギヤRの回転速度の関係や、デフサンギヤSd、デフリングギヤRd、及びデフキャリアCdの回転速度の関係を表している。図4において、実線は車両Vが直進している状態を示し、破線は第二実施形態のトルクベクタリング装置20によって、左右の駆動輪21L、21Rに回転速度差が生じている状態を示している。
車両Vが直進している状態でも、トルクベクタリングモータ2は回転している。左右の駆動輪21L、21Rに入力されるモータトルクに差を生じさせる場合には、制御部17はインバータ装置15に指令を出力して、トルクベクタリングモータ2のトルクTmtを増減する。すると、直線L2の傾きが変化し(図4の破線示)、左駆動輪21Lの回転速度N21L及び右駆動輪21Rの回転速度N21Rが変化する。
(本実施形態の効果)
上述したようにトルクベクタリング装置10、20を構成することによって、図2や図4に示すように、車両Vが直進している状態でも、トルクベクタリングモータ2は回転される。このため、このため、車両Vの直進時に、駆動モータジェネレータ1から左右の駆動輪21L、21Rに出力されるモータトルクTmが均等となるようにトルクベクタリングモータ2が制御される際に、トルクベクタリングモータ2が回転しないことによって、トルクベクタリングモータ2のトルクベクタリングステータ2aのうち特定の位相のトルクベクタリングステータ2aのみに電流が流れることが防止される。この結果、特定の位相のトルクベクタリングステータ2aの劣化が防止される。
上述したようにトルクベクタリング装置10、20を構成することによって、図2や図4に示すように、車両Vが直進している状態でも、トルクベクタリングモータ2は回転される。このため、このため、車両Vの直進時に、駆動モータジェネレータ1から左右の駆動輪21L、21Rに出力されるモータトルクTmが均等となるようにトルクベクタリングモータ2が制御される際に、トルクベクタリングモータ2が回転しないことによって、トルクベクタリングモータ2のトルクベクタリングステータ2aのうち特定の位相のトルクベクタリングステータ2aのみに電流が流れることが防止される。この結果、特定の位相のトルクベクタリングステータ2aの劣化が防止される。
第一実施形態のトルクベクタリング装置10は、トルクベクタリングモータ2と、第一サンギヤS1と、第一サンギヤS1の外周側に設けられ、第一サンギヤS1と噛み合う複数の第一プラネタリギヤP1と、第一サンギヤS1よりもギヤ径が大きい第二サンギヤS2と、第二サンギヤS2の外周側に設けられ、第二サンギヤS2と噛み合い第一プラネタリギヤP1と同軸に且つ一体に形成された複数の第二プラネタリギヤP2と、トルクベクタリングモータ2が連結され、複数の第一プラネタリギヤP1及び複数の第二プラネタリギヤP2を軸支する共通キャリアCcと、モータトルクTm(駆動トルク)が入力されるデフリングギヤRd(入力部材)と、第一サンギヤS1が連結されるとともに左駆動輪21Lが連結されたデフサンギヤSd(第一出力部材)と、第二サンギヤS2が連結されるとともに右駆動輪21Rが連結されたデフキャリアCd(第二出力部材)と、を備え、左右の駆動輪21L、21Rの回転速度差を吸収するデファレンシャル13と、を有する。このような構成によって、第一実施形態のトルクベクタリング装置10は、図2に示す速度線図において、トルクベクタリングモータ2の回転速度Nmtを示す縦線と、駆動モータジェネレータ1の回転速度Nmdを示す縦線との間の距離が大きくなる。このため、図2における直線L1は駆動モータジェネレータ1の回転速度Nmdを支点にその傾きが変化するので(図2の破線示)、梃子の原理により、左駆動輪21Lと右駆動輪21Rのそれぞれに入力されるモータトルク(駆動トルク)の差を大きくすることができる。
第二実施形態のトルクベクタリング装置20は、トルクベクタリングモータ2と、トルクベクタリングモータ2が連結されたサンギヤSと、サンギヤSの外周側に設けられ、サンギヤSと噛み合う複数のプラネタリギヤPと、複数のプラネタリギヤPを軸支するキャリアCと、複数のプラネタリギヤPの外周側に設けられ、複数のプラネタリギヤPと噛み合うリングギヤRと、モータトルク(駆動トルク)が入力されるリングギヤR(入力部材)と、キャリアCが連結されるとともに左駆動輪21Lが連結されたデフサンギヤSd(第一出力部材)と、リングギヤRが連結されるとともに右駆動輪21Rが連結されたデフキャリアCd(第二出力部材)と、を備え、左右の駆動輪21L、21Rの回転速度差を吸収するデファレンシャル13と、を有する。このように構成された第二実施形態のトルクベクタリング装置20は、図3に示すように、デファレンシャル13以外にシングルピニオン遊星歯車機構19のみで構成されている。このため、デファレンシャル13以外に複数列の遊星歯車機構で構成されたトルクベクタリング装置と比較して、第二実施形態のトルクベクタリング装置20の軸線方向の寸法を小型化することができる。
デファレンシャル13は、デフサンギヤSdと、デフサンギヤSdの外周側に設けられ、デフサンギヤSdと噛み合う複数の第一デフプラネタリギヤPd1と、第一デフプラネタリギヤPd1の外周側に設けられ、第一デフプラネタリギヤPd1と噛み合う複数の第二デフプラネタリギヤPd2と、複数の第一デフプラネタリギヤPd1及び複数の第二デフプラネタリギヤPd2を軸支するデフキャリアCdと、第二デフプラネタリギヤPd2の外周側に設けられ、及び第二デフプラネタリギヤPd2と噛み合うデフリングギヤRdと、を備えたダブルピニオン遊星歯車機構である。これにより、傘歯歯車を用いたデファレンシャルが設けられたトルクベクタリング装置と比較して、トルクベクタリング装置10、20の軸線方向の寸法を小型化することができる。
(別の実施形態)
上記した実施形態では、デファレンシャル13のデフリングギヤRdに駆動トルクを出力する駆動源は、駆動モータジェネレータ1である。しかし、デフリングギヤRdに駆動トルクを出力する駆動源が、エンジンである実施形態であっても差し支え無い。また、駆動モータジェネレータ1やトルクベクタリングモータ2は、発電機能の無いモータであっても差し支え無い。
上記した実施形態では、デファレンシャル13のデフリングギヤRdに駆動トルクを出力する駆動源は、駆動モータジェネレータ1である。しかし、デフリングギヤRdに駆動トルクを出力する駆動源が、エンジンである実施形態であっても差し支え無い。また、駆動モータジェネレータ1やトルクベクタリングモータ2は、発電機能の無いモータであっても差し支え無い。
上記した実施形態では、デフサンギヤSdに左ドライブシャフト22Lを介して一方の駆動輪である左駆動輪21Lが回転連結し、デフキャリアCdに右ドライブシャフト22Rを介して他方の駆動輪である右駆動輪21Rが回転連結している。しかし、デフサンギヤSdに右ドライブシャフト22Rを介して一方の駆動輪である右駆動輪21Rが回転連結し、デフキャリアCdに左ドライブシャフト22Lを介して他方の駆動輪である左駆動輪21Lが回転連結している実施形態であっても差し支え無い。
上記した実施形態では、デファレンシャル13は、ダブルピニオン遊星歯車機構である。しかし、デファレンシャル13は、傘歯歯車を用いたものであっても差し支え無い。
2…トルクベクタリングモータ、10…第一実施形態のトルクベクタリング装置、13…デファレンシャル、20…第二実施形態のトルクベクタリング装置、21L…左駆動輪、21R…右駆動輪、S…サンギヤ、S1…第一サンギヤ、S2…第二サンギヤ、Sd…デフサンギヤ(第一出力部材)、P…プラネタリギヤ、P1…第一プラネタリギヤ、P2…第二プラネタリギヤ、Pd1…第一デフプラネタリギヤ、Pd2…第二デフプラネタリギヤ、Cd…デフキャリア(第二出力部材)、Cc…共通キャリア、Rd…デフリングギヤ(入力部材)
Claims (3)
- トルクベクタリングモータと、
第一サンギヤと、
前記第一サンギヤの外周側に設けられ、前記第一サンギヤと噛み合う複数の第一プラネタリギヤと、
前記第一サンギヤよりもギヤ径が大きい第二サンギヤと、
前記第二サンギヤの外周側に設けられ、前記第二サンギヤと噛み合い前記第一プラネタリギヤと同軸に且つ一体に形成された複数の第二プラネタリギヤと、
前記トルクベクタリングモータが連結され、複数の前記第一プラネタリギヤ及び複数の前記第二プラネタリギヤを軸支する共通キャリアと、
駆動トルクが入力される入力部材と、前記第一サンギヤが連結されるとともに左右の駆動輪のうち一方の前記駆動輪が連結された第一出力部材と、前記第二サンギヤが連結されるとともに前記左右の駆動輪のうち他方側の前記駆動輪が連結された第二出力部材と、を備え、前記左右の駆動輪の回転速度差を吸収するデファレンシャルと、を有するトルクベクタリング装置。 - トルクベクタリングモータと、
前記トルクベクタリングモータが連結されたサンギヤと、
前記サンギヤの外周側に設けられ、前記サンギヤと噛み合う複数のプラネタリギヤと、
複数の前記プラネタリギヤを軸支するキャリアと、
複数の前記プラネタリギヤの外周側に設けられ、複数の前記プラネタリギヤと噛み合うリングギヤと、
駆動トルクが入力される入力部材と、前記キャリアが連結されるとともに左右の駆動輪のうち一方の前記駆動輪が連結された第一出力部材と、前記リングギヤが連結されるとともに前記左右の駆動輪のうち他方側の前記駆動輪が連結された第二出力部材と、を備え、前記左右の駆動輪の回転速度差を吸収するデファレンシャルと、を有するトルクベクタリング装置。 - 前記デファレンシャルは、
デフサンギヤと、
前記デフサンギヤの外周側に設けられ、前記デフサンギヤと噛み合う複数の第一デフプラネタリギヤと、
前記第一デフプラネタリギヤの外周側に設けられ、前記第一デフプラネタリギヤと噛み合う複数の第二デフプラネタリギヤと、
複数の前記第一デフプラネタリギヤ及び複数の前記第二デフプラネタリギヤを軸支するデフキャリアと、
前記第二デフプラネタリギヤの外周側に設けられ、及び前記第二デフプラネタリギヤと噛み合うデフリングギヤと、を備えたダブルピニオン遊星歯車機構であり、
前記入力部材は、前記デフリングギヤであり、
前記第一出力部材は、前記デフサンギヤであり、
前記第二出力部材は、前記デフキャリアである請求項1又は請求項2に記載のトルクベクタリング装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201680045864.2A CN107923509A (zh) | 2015-09-09 | 2016-08-30 | 扭矩矢量控制装置 |
| EP16844238.2A EP3348867B1 (en) | 2015-09-09 | 2016-08-30 | Torque vectoring device |
| US15/745,833 US10596895B2 (en) | 2015-09-09 | 2016-08-30 | Torque vectoring device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015-177571 | 2015-09-09 | ||
| JP2015177571A JP6447430B2 (ja) | 2015-09-09 | 2015-09-09 | トルクベクタリング装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017043377A1 true WO2017043377A1 (ja) | 2017-03-16 |
Family
ID=58240760
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/075371 WO2017043377A1 (ja) | 2015-09-09 | 2016-08-30 | トルクベクタリング装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10596895B2 (ja) |
| EP (1) | EP3348867B1 (ja) |
| JP (1) | JP6447430B2 (ja) |
| CN (1) | CN107923509A (ja) |
| WO (1) | WO2017043377A1 (ja) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102015223131A1 (de) * | 2015-11-24 | 2017-05-24 | Schaeffler Technologies AG & Co. KG | Antriebseinrichtung für ein Kraftfahrzeug |
| DE102017220167B3 (de) * | 2017-11-13 | 2019-03-21 | Audi Ag | Antriebsvorrichtung für eine Fahrzeugachse eines zweispurigen Fahrzeugs |
| JP6571157B2 (ja) * | 2017-12-25 | 2019-09-04 | 本田技研工業株式会社 | 動力配分装置 |
| KR102600054B1 (ko) * | 2018-07-10 | 2023-11-07 | 현대자동차 주식회사 | 토크 벡터링 장치 |
| KR102654446B1 (ko) * | 2018-12-05 | 2024-04-03 | 현대자동차 주식회사 | 토크 벡터링 장치 |
| KR102654449B1 (ko) * | 2018-12-05 | 2024-04-03 | 현대자동차 주식회사 | 토크 벡터링 장치 |
| KR102654455B1 (ko) * | 2018-12-18 | 2024-04-03 | 현대자동차 주식회사 | 토크 벡터링 장치 |
| KR102654456B1 (ko) * | 2018-12-18 | 2024-04-03 | 현대자동차 주식회사 | 토크 벡터링 장치 |
| KR102654454B1 (ko) * | 2018-12-18 | 2024-04-03 | 현대자동차 주식회사 | 토크 벡터링 장치 |
| US10982745B2 (en) * | 2019-01-15 | 2021-04-20 | GM Global Technology Operations LLC | Planetary differential drive system |
| CN113329925B (zh) * | 2019-03-19 | 2024-10-18 | 舍弗勒技术股份两合公司 | 轮毂电机驱动系统用扭矩矢量分配系统 |
| DE102019209461A1 (de) * | 2019-06-28 | 2020-12-31 | Zf Friedrichshafen Ag | Getriebe mit einer Torque-Vectoring-Überlagerungseinheit |
| JP2021038785A (ja) * | 2019-09-03 | 2021-03-11 | トヨタ自動車株式会社 | トルクベクタリング装置 |
| KR20210089817A (ko) * | 2020-01-08 | 2021-07-19 | 현대자동차주식회사 | 토크 벡터링 장치 |
| EP3879134B1 (en) | 2020-03-13 | 2023-11-15 | Volvo Car Corporation | Transmission arrangement with torque vectoring |
| JP7251506B2 (ja) * | 2020-03-24 | 2023-04-04 | トヨタ自動車株式会社 | トルクベクタリング装置 |
| SE2150342A1 (en) * | 2021-03-24 | 2022-09-25 | Borgwarner Sweden Ab | Electric drive module |
| DE102021006118B3 (de) * | 2021-12-13 | 2023-03-16 | Mercedes-Benz Group AG | Elektrisches Antriebssystem für ein Kraftfahrzeug mit zwei Elektromotoren und schaltbarer Torque- Vectoring-Funktion |
| DE102022000037B3 (de) | 2022-01-03 | 2023-04-13 | Mercedes-Benz Group AG | Elektrische Antriebsvorrichtung für ein Kraftfahrzeug mit einem Torque- Vectoring-Getriebe |
| DE102022000042B3 (de) | 2022-01-03 | 2023-04-13 | Mercedes-Benz Group AG | Elektrische Antriebsvorrichtung für ein Kraftfahrzeug, insbesondere für einen Kraftwagen |
| DE102022000324A1 (de) | 2022-01-27 | 2023-01-05 | Mercedes-Benz Group AG | Elektrische Antriebsvorrichtung für ein Kraftfahrzeug, insbesondere für einen Kraftwagen |
| DE102022000463B3 (de) | 2022-02-07 | 2023-03-16 | Mercedes-Benz Group AG | Elektrische Antriebseinheit für ein Kraftfahrzeug mit wählbarer Boost- oder Torque-Vectoring- Funktion |
| DE102022000462B3 (de) | 2022-02-07 | 2023-03-16 | Mercedes-Benz Group AG | Elektrische Antriebseinheit für ein Kraftfahrzeug mit wählbarer Boost- oder Torque-Vectoring- Funktion |
| DE102022000466A1 (de) | 2022-02-07 | 2023-03-09 | Mercedes-Benz Group AG | Elektrische Antriebseinheit für ein Kraftfahrzeug, insbesondere für einen Kraftwagen |
| DE102023001052B3 (de) | 2023-03-17 | 2024-05-02 | Mercedes-Benz Group AG | Elektrisches Antriebssystem für ein Kraftfahrzeug |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05169991A (ja) * | 1992-03-19 | 1993-07-09 | Aisin Aw Co Ltd | 電気自動車用駆動装置 |
| JPH11170881A (ja) * | 1997-12-10 | 1999-06-29 | Nissan Motor Co Ltd | 車両の走行アシスト装置 |
| WO2014008896A1 (de) * | 2012-07-13 | 2014-01-16 | Schaeffler Technologies AG & Co. KG | Elektrische achse mit 2 gang getriebe |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2687052B2 (ja) * | 1991-04-19 | 1997-12-08 | 本田技研工業株式会社 | 差動装置のトルク分配機構 |
| EP1792104A2 (de) * | 2004-09-15 | 2007-06-06 | Magna Steyr Fahrzeugtechnik AG & Co KG | Differentialgetriebeeinheit mit steuerbarer drehmoment- und drehzahl verteilung |
| DE102006031089A1 (de) * | 2006-07-05 | 2008-01-17 | Fzgmbh | Antriebsvorrichtung für ein Kraftfahrzeug |
| US8632434B2 (en) | 2009-03-31 | 2014-01-21 | Honda Motor Co., Ltd. | Drive device and vehicle with same |
| CN103890458B (zh) * | 2011-11-02 | 2016-11-16 | 本田技研工业株式会社 | 动力装置 |
-
2015
- 2015-09-09 JP JP2015177571A patent/JP6447430B2/ja not_active Expired - Fee Related
-
2016
- 2016-08-30 US US15/745,833 patent/US10596895B2/en active Active
- 2016-08-30 WO PCT/JP2016/075371 patent/WO2017043377A1/ja active Application Filing
- 2016-08-30 CN CN201680045864.2A patent/CN107923509A/zh active Pending
- 2016-08-30 EP EP16844238.2A patent/EP3348867B1/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05169991A (ja) * | 1992-03-19 | 1993-07-09 | Aisin Aw Co Ltd | 電気自動車用駆動装置 |
| JPH11170881A (ja) * | 1997-12-10 | 1999-06-29 | Nissan Motor Co Ltd | 車両の走行アシスト装置 |
| WO2014008896A1 (de) * | 2012-07-13 | 2014-01-16 | Schaeffler Technologies AG & Co. KG | Elektrische achse mit 2 gang getriebe |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3348867B1 (en) | 2019-12-04 |
| US20180208048A1 (en) | 2018-07-26 |
| CN107923509A (zh) | 2018-04-17 |
| US10596895B2 (en) | 2020-03-24 |
| JP2017053430A (ja) | 2017-03-16 |
| EP3348867A4 (en) | 2018-09-12 |
| EP3348867A1 (en) | 2018-07-18 |
| JP6447430B2 (ja) | 2019-01-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6447430B2 (ja) | トルクベクタリング装置 | |
| JP3852562B2 (ja) | 動力入出力装置 | |
| JP6445091B2 (ja) | 動力装置 | |
| JP6565891B2 (ja) | 電動車両の駆動装置 | |
| JP2008290613A (ja) | ハイブリッド車両の駆動装置 | |
| JP2008012992A (ja) | ハイブリッド車両の駆動制御装置 | |
| JPWO2012086036A1 (ja) | 車両用動力伝達装置 | |
| JP2011038637A (ja) | 車両用駆動装置および車両の駆動方法 | |
| JP2011143754A (ja) | ハイブリッド車の駆動装置 | |
| JP6519723B1 (ja) | 電動車両駆動装置 | |
| WO2015098943A1 (ja) | 車両用駆動装置 | |
| JP2009190575A (ja) | ハイブリッド車の駆動装置 | |
| JP2009248825A (ja) | ハイブリッド駆動装置 | |
| KR101631779B1 (ko) | 차량용 구동 장치 | |
| JP2007010093A (ja) | モータ動力伝達装置 | |
| JP2007237885A (ja) | 車両の動入出力装置 | |
| JP2015230052A (ja) | 遊星歯車機構 | |
| CN110630698A (zh) | 车辆驱动装置 | |
| JP5409748B2 (ja) | 動力伝達装置 | |
| JP6521204B1 (ja) | 電動車両駆動装置 | |
| JP2007237886A (ja) | 車両の動力入出力装置 | |
| JP7035953B2 (ja) | 車両用ギヤ | |
| JP6569372B2 (ja) | 動力配分装置 | |
| JP6519340B2 (ja) | トルクベクタリング装置 | |
| JP7196765B2 (ja) | ハイブリッド車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16844238 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15745833 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |