WO2016189720A1 - オートサンプラ - Google Patents
オートサンプラ Download PDFInfo
- Publication number
- WO2016189720A1 WO2016189720A1 PCT/JP2015/065342 JP2015065342W WO2016189720A1 WO 2016189720 A1 WO2016189720 A1 WO 2016189720A1 JP 2015065342 W JP2015065342 W JP 2015065342W WO 2016189720 A1 WO2016189720 A1 WO 2016189720A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- needle
- adapter
- sample
- drive mechanism
- flow path
- Prior art date
Links
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N30/00—Investigating or analysing materials by separation into components using adsorption, absorption or similar phenomena or using ion-exchange, e.g. chromatography or field flow fractionation
- G01N30/02—Column chromatography
- G01N30/04—Preparation or injection of sample to be analysed
- G01N30/24—Automatic injection systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
- G01N1/02—Devices for withdrawing samples
- G01N1/10—Devices for withdrawing samples in the liquid or fluent state
- G01N1/14—Suction devices, e.g. pumps; Ejector devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N30/00—Investigating or analysing materials by separation into components using adsorption, absorption or similar phenomena or using ion-exchange, e.g. chromatography or field flow fractionation
- G01N30/02—Column chromatography
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N30/00—Investigating or analysing materials by separation into components using adsorption, absorption or similar phenomena or using ion-exchange, e.g. chromatography or field flow fractionation
- G01N30/02—Column chromatography
- G01N30/04—Preparation or injection of sample to be analysed
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N30/00—Investigating or analysing materials by separation into components using adsorption, absorption or similar phenomena or using ion-exchange, e.g. chromatography or field flow fractionation
- G01N30/02—Column chromatography
- G01N30/04—Preparation or injection of sample to be analysed
- G01N30/16—Injection
- G01N30/20—Injection using a sampling valve
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N30/00—Investigating or analysing materials by separation into components using adsorption, absorption or similar phenomena or using ion-exchange, e.g. chromatography or field flow fractionation
- G01N30/02—Column chromatography
- G01N30/26—Conditioning of the fluid carrier; Flow patterns
- G01N30/28—Control of physical parameters of the fluid carrier
- G01N30/34—Control of physical parameters of the fluid carrier of fluid composition, e.g. gradient
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/10—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices
- G01N35/1095—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices for supplying the samples to flow-through analysers
- G01N35/1097—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices for supplying the samples to flow-through analysers characterised by the valves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
- G01N1/02—Devices for withdrawing samples
- G01N1/22—Devices for withdrawing samples in the gaseous state
- G01N1/24—Suction devices
- G01N2001/247—Syringes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N30/00—Investigating or analysing materials by separation into components using adsorption, absorption or similar phenomena or using ion-exchange, e.g. chromatography or field flow fractionation
- G01N30/02—Column chromatography
- G01N30/88—Integrated analysis systems specially adapted therefor, not covered by a single one of the groups G01N30/04 - G01N30/86
- G01N2030/8804—Integrated analysis systems specially adapted therefor, not covered by a single one of the groups G01N30/04 - G01N30/86 automated systems
Definitions
- the present invention relates to an autosampler that collects a sample to be analyzed by a liquid chromatograph from a sample container and injects the sample into an analysis channel that leads to an analysis column.
- an autosampler In analysis using a liquid chromatograph, an autosampler is used to automatically introduce a plurality of samples into an analysis column in a predetermined order.
- an autosampler a sample using a so-called total injection method in which a predetermined amount of sample is collected from a sample container and injected into an analysis flow channel through which a mobile phase flows is widely used.
- sample injection by the full volume injection method first, a predetermined amount of sample is sucked from the sample container by the needle and is retained in the sample loop connected to the proximal end portion of the needle. Thereafter, the sample loop is inserted between the liquid feeding device for feeding the mobile phase and the analytical column by inserting the needle into the sample injection port and switching the flow path using the flow path switching valve. Thereby, all the samples staying in the sample loop are transported and introduced into the analytical column by the mobile phase from the sample container (see Patent Document 1).
- a fixed loop injection method is adopted.
- a predetermined amount of sample is sucked from a sample container by a needle, stays in a sample loop for sample suction connected to the proximal end portion of the needle, and then the needle is inserted into a sample injection port.
- a necessary amount of sample is retained in a sample loop for sample injection connected through a switching valve.
- the sample loop for sample injection is inserted between the liquid feeding device for feeding the mobile phase and the analytical column. Thereby, the sample staying in the sample loop for sample injection is transported and introduced into the analytical column by the mobile phase from the sample container.
- the total amount injection method has an advantage that there is no sample loss because the entire amount of the sample retained in the sample loop is injected into the analysis channel.
- the fixed loop injection method a part of the sample retained in the sample loop for sample inhalation is discarded, which is a demerit particularly in the case of a valuable sample.
- the flow path connected to the proximal end of the needle is long to ensure the mobility of the needle, the dead volume is large, and sample diffusion and gradient delay are likely to occur.
- the dead volume is smaller than in the full injection method, the peak of the chromatogram is sharper than in the full injection method, and the analysis speed is also faster. There is a merit.
- the maximum value of the amount of sample that can be introduced into the analysis column and analyzed is determined by the volume of the sample loop. Therefore, depending on the amount of sample injected, it is necessary to replace the sample loop for sample injection with a sample loop having an optimum capacity.
- exchanging the sample loop requires complicated removal of the fitting used to connect the sample loop and then replacing it with another sample loop, which is cumbersome.
- an object of the present invention is to make it possible to easily change a capacity for temporarily storing a sample to be introduced into an analysis column and to reduce a dead volume in an autosampler.
- One embodiment of an autosampler includes a needle, a needle driving mechanism, an injection port, a syringe pump, a first adapter, a mobile phase feeding flow path, a first adapter driving mechanism, a second adapter, and a second adapter driving mechanism. And a switching mechanism and a control unit.
- the needle has a capacity for storing the sample inside, and both ends are pointed.
- the needle drive mechanism holds the needle in the vertical direction and moves it in the vertical direction and the horizontal plane direction.
- the injection port has an opening that opens upward to insert the lower end of the needle, and connects the needle by inserting the lower end of the needle into the opening.
- a syringe pump performs suction and discharge of liquid.
- the first adapter has an opening that opens to the upper end of the needle through the suction / discharge port of the syringe pump, and the needle is connected by inserting the upper end of the needle into the opening.
- the pump and the needle communicate with each other.
- the mobile phase liquid flow path is for feeding the mobile phase.
- the second adapter is connected to the mobile phase liquid flow path, and has an opening that opens downward to insert the upper end of the needle, and the needle is connected and moved by inserting the upper end of the needle into the opening.
- the phase-feed liquid channel and the needle communicate with each other.
- the first adapter drive mechanism is configured to attach and detach the first adapter with respect to the needle upper end by moving the first adapter in the vertical direction above the needle.
- the second adapter drive mechanism is configured to attach and detach the second adapter to and from the needle upper end by moving the second adapter in the vertical direction above the needle having the lower end inserted into the injection port.
- the switching mechanism communicates between the analysis flow path leading to the analysis column that separates the sample for each component and the injection port, and whether to connect a liquid feeding device that feeds the mobile phase to the mobile phase liquid flow path. It is to switch whether or not to make it.
- This switching mechanism has an injection mode in which the liquid delivery device is connected to the mobile phase liquid delivery flow path and at the same time the communication flow path is communicated between the analysis flow path and the injection port.
- the control unit controls the needle drive mechanism, the syringe pump, the first adapter drive mechanism, the second adapter drive mechanism, and the switching mechanism.
- the control unit is configured to connect the upper end of the needle to the first adapter while inserting the lower end of the needle into a sample container containing a sample to be inhaled, and to perform a sampling operation for inhaling the sample into the needle by a syringe pump.
- the needle moving operation unit configured to execute the needle moving operation for connecting the needle lower end to the injection port while the needle upper end is connected to the first adapter, and the needle moving operation After that, the first adapter is detached from the upper end of the needle, the second adapter is connected to the upper end of the needle, and an injection operation unit configured to execute an injection operation for setting the switching mechanism to the injection mode is provided.
- a needle having a capacity for retaining a sample therein and having both ends of a tip shape is used, and an injection port, a first adapter, Since the flow path including the needle is configured by attaching and detaching the second adapter, the sample loop for temporarily retaining the sample is unnecessary, the dead volume can be reduced, and the sample loop is replaced. No complicated work is required.
- the needle drive mechanism has a needle holding portion that holds the needle in a detachable manner. If it does so, it can change to a needle with a different capacity
- a needle installation part for installing a plurality of needles having different internal capacities from each other is further provided, and the needle drive mechanism has one needle corresponding to the amount of sample injected into the analysis channel among the needles installed in the needle installation part. It is preferable to be held by a needle holding portion. Then, a needle having an appropriate internal volume is automatically used according to the sample injection amount set by the user.
- the needle holding portion has a protruding portion protruding in the circumferential direction on the outer peripheral surface of the needle, and the needle holding portion holds the needle by fitting the protruding portion on the upper surface from above.
- variety larger than the outer diameter of the needle provided from the side surface to the center of a recessed part and smaller than a recessed part internal diameter is mentioned.
- the needle holding portion is raised relative to the needle, and the protrusion is fitted into the concave portion.
- the needle can be removed from the needle holding portion by lowering the needle holding portion relative to the needle and releasing the protrusion from the recess, and then connecting the needle and the needle holding portion so that the needle passes through the notch. Just move it relatively in the horizontal direction. Accordingly, the needle can be easily attached to and detached from the needle holding portion.
- the second adapter drive mechanism there is a mechanism for moving the second adapter in the vertical direction above the injection port.
- the first adapter drive mechanism has a mechanism for moving the first adapter in the vertical direction above the needle, and a mechanism for retracting the first adapter from above the needle when the lower end of the needle is connected to the injection port. .
- the needle 2 for inhaling the sample from the sample container 6 is held by the needle drive mechanism 4 in a state of being oriented in the vertical direction.
- one end of the syringe flow path 10 or the mobile phase feeding flow path 20 can be attached to and detached from the upper end 2 b of the needle 2.
- a first adapter 12 is provided at one end of the syringe flow path 10
- a second adapter 22 is provided at one end of the mobile phase liquid supply flow path 20.
- the first adapter 12 is moved in the horizontal plane direction and the vertical direction by the first adapter drive mechanism 14.
- the second adapter 22 is provided above an injection port 18 described later, and is moved in the vertical direction by the second adapter drive mechanism 24.
- the other end of the syringe flow path 10 communicates with an intake / discharge port of a syringe pump 8 for sucking and discharging liquid or gas.
- a syringe pump 8 for sucking and discharging liquid or gas.
- the other end of the mobile phase liquid flow path 20 is connected to one port (1) of the switching valve 16.
- the flow path 20 is a mobile phase liquid flow path for feeding a mobile phase supplied by a liquid feed pump 28 described later.
- the switching valve 16 is a six-way valve having six ports (1) to (6).
- the mobile phase supply flow path 26 is connected to the port (2), and the port (3) adjacent to the port (2).
- An analysis flow path 30 leading to the analysis column 32 and the detector 34 is connected to the.
- the port (4) adjacent to the port (3) communicates with the injection port 18.
- the injection port 18 communicates between the port (4) of the switching valve 16 and the needle 2 by inserting the lower end 2a of the needle 2.
- the ports (5) and (6) of the switching valve 16 are closed ports, neither of the flow paths is connected, and the atmosphere is not released.
- the switching valve 16 is a two-position valve that switches the connection between adjacent ports, and the mobile phase supply channel 26 is selectively placed on either the mobile phase liquid supply channel 20 side or the analysis channel 30 side. It has a switching mechanism to connect.
- FIG. 1 shows a state in which the port (1) is connected to the port (6), the port (2) is connected to the port (3), and the port (4) is connected to the port (5).
- the state of the switching valve 16 is referred to as a loading mode.
- the state of the switching valve 16 connected between the port (1) and the port (2), between the port (3) and the port (4), and between the port (5) and the port (6) is injected. This is called a mode.
- FIG. 5 shows that the switching valve 16 is switched from the loading mode to the injection mode with the lower end 2a of the needle 2 inserted into the injection port 18 and the second adapter 22 connected to the upper end 2b of the needle 2.
- the mobile phase supplied by the liquid feeding pump 28 flows through the needle 2 via the mobile phase liquid feeding flow path 20, whereby the sample in the needle 2 enters the analysis flow path 30 via the injection port 18. be introduced.
- the first adapter 12 and the second adapter 22 are provided with openings 12a and 22a that open downward.
- the inner peripheral surfaces of the openings 12a and 22a are inclined so that the inner diameter becomes larger as going downward, and the inclination angle is larger than the inclination angle of the outer peripheral surface of the upper end 2b of the needle 2.
- end portions of flow paths 12b and 22b communicating with the syringe flow path 10 and the mobile phase liquid supply flow path 22 are provided.
- the inner diameters of the flow paths 12b and 22b are larger than the outer diameter of the tip of the upper end 2b of the needle 2, and a part of the tip end side of the upper end 2b of the needle 2 is inserted into the flow paths 12b and 22b and the outer periphery of the upper end 2b.
- the edges of the flow paths 12b and 22b are in line contact with the surface, thereby improving the liquid tightness when the needle 2 is connected.
- the injection port 18 is provided with an opening 18a having an upper opening, and an end of a flow path 18b communicating with the port (4) of the switching valve 16 is provided at the bottom of the opening 18a.
- the injection port 18 also has liquid tightness when the needle 2 is connected by line contact between the outer peripheral surface of the lower end 2a of the needle 2 and the edge of the flow path 18b. Has an enhanced structure.
- the autosampler 1 includes a control unit 36 that controls operations of the needle drive mechanism 4, the first adapter drive mechanism 14, the second adapter drive mechanism 24, the switching valve 16, and the syringe pump 8.
- the control unit 36 includes a sampling operation unit 38, a needle movement operation unit 40, and an injection operation unit 42.
- the sampling operation unit 38 is configured to execute a sampling operation for sucking a sample into the needle 2.
- the needle moving operation unit 40 is configured to execute an operation of moving the needle 2 to the injection port 18 after the sampling operation is completed.
- the injection operation unit 42 is configured to connect the second adapter 22 to the upper end of the needle 2 and switch the switching valve 16 to the injection mode after the needle movement operation is completed.
- control unit 36 includes a computer provided inside the autosampler 1 and a storage device that stores information.
- the sampling operation unit 38, the needle movement operation unit 40, and the injection operation unit 42 are functions obtained by a computer executing a program stored in a storage device that constitutes the control unit 36.
- the autosampler 1 has a second adapter 22 connected to the upper end 2b of the needle 2 before inhaling the sample from the desired sample container 6, and the lower end of the needle 2 is injected.
- the switching valve 16 is in the injecting mode, and the mobile phase flows in the needle 2.
- the second adapter 22 is detached from the upper end 2b of the needle 2, and the first adapter 12 is moved. Connected to the upper end 2 b of the needle 2.
- the needle 2 is moved to the position of the desired sample container 6, and the lower end 2 a of the needle 2 is inserted into the sample container 6. Then, a predetermined amount of sample is retained in the needle 2 by sucking the syringe pump 8.
- the needle 2 is pulled out from the sample container 6 and moved to the position of the injection port 18. Is connected to the injection port 18.
- the first adapter 12 is detached from the upper end 2b of the needle 2 and retracted from a position above the needle 2.
- the switching valve 16 since the switching valve 16 is in the loading mode, the port (4) leading to the injection port 18 communicates with the closed port (5), and even if the first adapter 12 is detached from the upper end 2b of the needle 2. The sample continues to stay in the needle 2.
- the second adapter 22 is connected to the upper end 2b of the needle 2 and the switching valve 16 is switched to the injection mode.
- the switching valve 16 is switched to the injection mode, and the mobile phase liquid supply channel 20 and the needle 2 are interposed between the mobile phase supply channel 26 and the analysis channel 30.
- the mobile phase from the mobile phase supply channel 26 is supplied to the needle 2 via the mobile phase liquid supply channel 20, and the sample in the needle 2 is guided to the analysis channel 30.
- the sample introduced into the analysis flow path 30 is separated for each component in the analysis column 32 and detected by the detector 34.
- the ball screw 46 arranged in the vertical direction is supported on the horizontal moving part 44 that moves in the horizontal plane direction.
- the ball screw 46 is rotated by a motor 48.
- a first horizontal arm 50 extending in the horizontal direction is attached to the ball screw 46.
- the first horizontal arm 50 is configured to move in the vertical direction along the ball screw 46 without rotating as the ball screw 46 rotates.
- a needle holding arm 58 extending in the horizontal direction is provided below the first horizontal arm 50 at a distance from the first horizontal arm 50.
- the needle holding arm 58 is fixed to the first horizontal arm 50 and moves in the vertical direction together with the first horizontal arm 50.
- the needle 2 is detachably held on the distal end side of the needle holding arm 58.
- the structure in which the needle holding arm 58 holds the needle 2 in a detachable manner will be described later.
- the horizontal moving part 44, the ball screw 46, the motor 48, the first horizontal arm 50 and the needle holding arm 58 realize the needle driving mechanism 4.
- a ball screw 52 arranged in the vertical direction is supported between the first horizontal arm 50 and the needle holding arm 58.
- the ball screw 52 is rotated by a motor 54.
- a second horizontal arm 56 extending in the horizontal direction is attached to the ball screw 52.
- the second horizontal arm 56 is configured to move in the vertical direction along the ball screw 52 without rotating as the ball screw 52 rotates.
- a first adapter holding arm 72 extending in the horizontal direction is attached to the distal end portion of the second horizontal arm 56 so as to be rotatable about a rotation shaft 70 in a horizontal plane.
- the rotating shaft 70 is rotated by a motor 74.
- the first adapter holding arm 72 is attached to the distal end of the first adapter holding arm 72, and the first adapter 12 is disengaged from the position immediately above the needle 2 by the rotation of the first adapter holding arm 72 (see FIG. 8 and the state in which the first adapter 12 is located immediately above the needle 2 (the state shown in FIG. 9).
- the horizontal moving unit 44, the ball screw 46, the motor 48, the first horizontal arm 50, the ball screw 52, the motor 54, the second horizontal arm 56, and the first adapter holding arm 72 realize the first adapter drive mechanism 14.
- the needle 2 can be moved to the position of the injection port 18 or the desired sample container 6 with the first adapter 12 connected to the upper end portion of the needle 2.
- the adapter 12 can be retracted from a position directly above the needle 2.
- the second adapter drive mechanism 24 for moving the second adapter 22 in the vertical direction at a position directly above the injection port 18 is realized by a ball screw support portion 62, a ball screw 64, a motor 66, and a second adapter holding arm.
- the ball screw support portion 62 supports the ball screw 64 in a vertical direction and rotatably.
- the ball screw 64 is rotated by a motor 66.
- the second adapter holding arm 68 moves in the vertical direction along the ball screw 64 as the ball screw 64 rotates.
- the autosampler of this embodiment is provided with a needle installation portion 76 in which a plurality of needles 2 having different internal capacities are installed within the movement range of the needle holding arm 58 in the apparatus. It has been.
- the needle installation portion 76 has a vertical hole that accommodates the lower portion of the needle 2.
- the upper part of the needle 2 protrudes upward from the hole of the needle installation part 76.
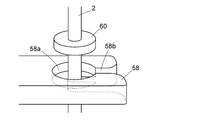
- An annular ring 60 protruding in the outer peripheral direction is provided as a protrusion on the needle 2.
- a concave portion 58 a for fitting the ring 60 provided on the needle 2 is provided on the upper surface of the distal end portion of the needle holding arm 58.
- the needle holding arm 58 holds the needle 2 by fitting the ring 60 into the recess 58a.
- an opening 58 b (cut) having a width slightly larger than the outer diameter of the needle 2 is provided on one side surface of the needle holding arm 58.
- the opening 58b reaches the center of the recess 58a.
- the needle holding arm 58 is moved until the needle holding arm 58 comes below the ring 60.
- the needle 2 is pulled out from the opening 58b of the needle holding arm 58 by lowering and moving the needle holding arm 58 in the horizontal direction.
- the needle 2 can be attached and detached automatically by the needle holding arm 58.
- the apparatus can be automatically replaced with an appropriate needle 2 so as to use the needle 2 having an internal volume corresponding to the sample injection amount set by the user.
Abstract
Description
2 ニードル
2a ニードル下端部
2b ニードル上端部
4 ニードル駆動機構
6 試料容器
8 シリンジポンプ
10 シリンジ流路
12 第1アダプタ
14 第1アダプタ駆動機構
16 切替バルブ
18 インジェクションポート
20 移動相送液流路
22 第2アダプタ
24 第2アダプタ駆動機構
26 移動相供給流路
28 送液ポンプ
30 分析流路
32 分析カラム
34 検出器
36 制御部
38 サンプリング動作部
40 ニードル移動動作部
42 インジェクティング動作部
44 水平移動部
46,52,64 ボールネジ
48,54,66,74 モータ
50 第1水平アーム
56 第2水平アーム
58 ニードル保持アーム
58a 凹部
58b 開口
60 リング
62 ボールネジ支持部
68 第2アダプタ保持アーム
70 回転軸
72 第1アダプタ保持アーム
76 ニードル設置部
Claims (5)
- 内部に試料を貯留するための容量をもち両端が尖端形状となっているニードルと、
そのニードルを鉛直向きに保持して鉛直方向と水平面内方向に移動させるニードル駆動機構と、
前記ニードルの下端を挿入するために上方が開口した開口部を有し、該開口部に前記ニードル下端が挿入されることで前記ニードルを接続するインジェクションポートと、
液の吸入と吐出を行なうシリンジポンプと、
前記シリンジポンプの吸入・吐出口に通じ前記ニードルの上端を挿入するために下方が開口した開口部を有し、該開口部に前記ニードル上端が挿入されることで前記ニードルが接続され、前記シリンジポンプと前記ニードルとの間を連通させる第1アダプタと、
移動相を送液するための移動相送液流路と、
前記移動相送液流路に接続され、前記ニードルの上端を挿入するために下方が開口した開口部を有し、該開口部に前記ニードル上端が挿入されることで前記ニードルが接続され、前記移動相送液流路と前記ニードルとの間を連通させる第2アダプタと、
前記第1アダプタを前記ニードルの上方で鉛直方向に移動させることにより、前記ニードル上端部に対する前記第1アダプタの着脱を行なう第1アダプタ駆動機構と、
前記第2アダプタを、下端が前記インジェクションポートに挿入された前記ニードルの上方において鉛直方向に移動させることにより、前記ニードル上端部に対する前記第2アダプタの着脱を行なう第2アダプタ駆動機構と、
移動相を送液する送液装置を前記移動相送液流路に接続するか否か、及び試料を成分ごとに分離する分析カラムに通じる分析流路と前記インジェクションポートとの間を連通させるか否かを切り替える切替機構であって、前記送液装置を前記移動相送液流路に接続すると同時に前記分析流路と前記インジェクションポートとの間を連通させるインジェクティングモードを有する切替機構と、
前記ニードル駆動機構、前記シリンジポンプ、前記第1アダプタ駆動機構、前記第2アダプタ駆動機構及び切替機構を制御する制御部であって、吸入対象の試料を収容した試料容器内に前記ニードル下端を挿入しながら前記ニードル上端を前記第1アダプタに接続し、前記シリンジポンプにより前記ニードル内に試料を吸入するサンプリング動作を実行するように構成されたサンプリング動作部、前記サンプリング動作の後、前記ニードル上端を前記第1アダプタに接続した状態で前記ニードル下端を前記インジェクションポートに接続するニードル移動動作を実行するように構成されたニードル移動動作部、及び前記ニードル移動動作の後、前記第1アダプタを前記ニードル上端から離脱させ、前記ニードル上端に前記第2アダプタを接続し、前記切替機構を前記インジェクティングモードにするインジェクティング動作を実行するように構成されたインジェクティング動作部を有する制御部と、を備えたオートサンプラ。 - 前記ニードル駆動機構は、前記ニードルを着脱可能に保持するニードル保持部を有する請求項1に記載のオートサンプラ。
- 互いに内部容量の異なる複数の前記ニードルを設置するためのニードル設置部をさらに備え、
前記ニードル駆動機構は、前記ニードル設置部に設置された前記ニードルのうち前記分析流路への試料注入量に応じた1つのニードルを前記ニードル保持部により保持する請求項2に記載のオートサンプラ。 - 前記ニードル外周面にその周方向へ突起した突起部を有し、
前記ニードル保持部は、上面に前記突起部を上方から嵌合させて前記ニードルを保持する凹部を有するとともに、側面から前記凹部中央にかけて設けられた前記ニードルの外径よりも大きく前記凹部内径よりも小さい幅の切込みを有するものである請求項2又は3に記載のオートサンプラ。 - 前記第2アダプタ駆動機構は、前記第2アダプタを前記インジェクションポートの上方において鉛直方向に移動させる機構であり、
前記第1アダプタ駆動機構は、前記第1アダプタを前記ニードルの上方において鉛直方向へ移動させる機構、及び前記ニードル下端が前記インジェクションポートに接続されたときに前記第1アダプタを前記ニードルの上方から退避させる機構を有するものである請求項1から4のいずれか一項に記載のオートサンプラ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/065342 WO2016189720A1 (ja) | 2015-05-28 | 2015-05-28 | オートサンプラ |
| US15/563,425 US10416127B2 (en) | 2015-05-28 | 2015-05-28 | Autosampler |
| JP2017520174A JP6319516B2 (ja) | 2015-05-28 | 2015-05-28 | オートサンプラ |
| CN201580078447.3A CN107430103B (zh) | 2015-05-28 | 2015-05-28 | 自动取样器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/065342 WO2016189720A1 (ja) | 2015-05-28 | 2015-05-28 | オートサンプラ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016189720A1 true WO2016189720A1 (ja) | 2016-12-01 |
Family
ID=57392627
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/065342 WO2016189720A1 (ja) | 2015-05-28 | 2015-05-28 | オートサンプラ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10416127B2 (ja) |
| JP (1) | JP6319516B2 (ja) |
| CN (1) | CN107430103B (ja) |
| WO (1) | WO2016189720A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020121430A1 (ja) * | 2018-12-12 | 2020-06-18 | 株式会社島津製作所 | クロマトグラフ用オートサンプラ |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016189720A1 (ja) * | 2015-05-28 | 2016-12-01 | 株式会社島津製作所 | オートサンプラ |
| WO2021188530A1 (en) * | 2020-03-17 | 2021-09-23 | Waters Technologies Corporation | Needle drive, system and method |
| US11879875B2 (en) * | 2020-03-17 | 2024-01-23 | Waters Technologies Corporation | Sample manager, system and method |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5850464A (ja) * | 1981-09-19 | 1983-03-24 | Suguru Nakada | 自動試料注入装置 |
| JPH03113361A (ja) * | 1989-09-28 | 1991-05-14 | Shimadzu Corp | 液体クロマトグラフ/質量分析計 |
| JPH10170488A (ja) * | 1996-12-13 | 1998-06-26 | Shimadzu Corp | 試料導入装置 |
| US20140318274A1 (en) * | 2011-06-09 | 2014-10-30 | Agilent Technologies, Inc. | Injection needle cartridge with integrated sealing force generator |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3116821B2 (ja) * | 1996-04-30 | 2000-12-11 | 株式会社島津製作所 | オ−トインジェクタ |
| JP4348279B2 (ja) * | 2004-11-16 | 2009-10-21 | 株式会社資生堂 | 試料吸入用ニードル及び試料注入装置 |
| WO2011027410A1 (ja) * | 2009-09-07 | 2011-03-10 | 株式会社島津製作所 | オートサンプラ |
| GB2486677A (en) * | 2010-12-22 | 2012-06-27 | Agilent Technologies Inc | Ceramic injection needle for analysis system |
| US9739794B2 (en) * | 2011-06-09 | 2017-08-22 | Agilent Technologies, Inc. | Sample injector with disconnectable injection needle |
| CN105745535B (zh) * | 2013-07-17 | 2017-07-28 | 积水医疗株式会社 | 用于样品分析仪的梯度液体输送装置 |
| CN203443823U (zh) * | 2013-09-18 | 2014-02-19 | 国家电网公司 | 一种双孔双向针头 |
| US9823225B2 (en) * | 2014-08-25 | 2017-11-21 | Waters Technologies Corporation | Injector sample dilution for a liquid chromatography system |
| US9816971B2 (en) * | 2014-09-08 | 2017-11-14 | Waters Technologies Corporation | Controllable injector sample dilution for a liquid chromatography system |
| JP6350348B2 (ja) * | 2015-03-16 | 2018-07-04 | 株式会社島津製作所 | オートサンプラ及び液体クロマトグラフ |
| WO2016189720A1 (ja) * | 2015-05-28 | 2016-12-01 | 株式会社島津製作所 | オートサンプラ |
-
2015
- 2015-05-28 WO PCT/JP2015/065342 patent/WO2016189720A1/ja active Application Filing
- 2015-05-28 CN CN201580078447.3A patent/CN107430103B/zh not_active Expired - Fee Related
- 2015-05-28 US US15/563,425 patent/US10416127B2/en not_active Expired - Fee Related
- 2015-05-28 JP JP2017520174A patent/JP6319516B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5850464A (ja) * | 1981-09-19 | 1983-03-24 | Suguru Nakada | 自動試料注入装置 |
| JPH03113361A (ja) * | 1989-09-28 | 1991-05-14 | Shimadzu Corp | 液体クロマトグラフ/質量分析計 |
| JPH10170488A (ja) * | 1996-12-13 | 1998-06-26 | Shimadzu Corp | 試料導入装置 |
| US20140318274A1 (en) * | 2011-06-09 | 2014-10-30 | Agilent Technologies, Inc. | Injection needle cartridge with integrated sealing force generator |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020121430A1 (ja) * | 2018-12-12 | 2020-06-18 | 株式会社島津製作所 | クロマトグラフ用オートサンプラ |
| JPWO2020121430A1 (ja) * | 2018-12-12 | 2021-09-27 | 株式会社島津製作所 | クロマトグラフ用オートサンプラ |
| JP7156395B2 (ja) | 2018-12-12 | 2022-10-19 | 株式会社島津製作所 | クロマトグラフ用オートサンプラ |
Also Published As
| Publication number | Publication date |
|---|---|
| US20180088090A1 (en) | 2018-03-29 |
| CN107430103A (zh) | 2017-12-01 |
| US10416127B2 (en) | 2019-09-17 |
| CN107430103B (zh) | 2019-09-24 |
| JPWO2016189720A1 (ja) | 2017-09-14 |
| JP6319516B2 (ja) | 2018-05-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6319516B2 (ja) | オートサンプラ | |
| JP6350348B2 (ja) | オートサンプラ及び液体クロマトグラフ | |
| JP6409971B2 (ja) | オートサンプラ及び液体クロマトグラフ | |
| JP2016173256A5 (ja) | ||
| US10955390B2 (en) | Autosampler and liquid chromatograph | |
| JP5471846B2 (ja) | 液体試料導入装置及び液体試料導入方法 | |
| JP6717386B2 (ja) | 流体クロマトグラフ | |
| JP6398867B2 (ja) | オートサンプラ | |
| JP2003215118A (ja) | 液体クロマトグラフ用オートサンプラ | |
| JP4228502B2 (ja) | 液体クロマトグラフ及び流路切替バルブ | |
| JP7156154B2 (ja) | 培地処理システム及び培地処理方法 | |
| JP2019100875A (ja) | 試料を希釈する機能を備えた装置及び試料の希釈方法 | |
| JP2016070695A (ja) | オートサンプラ及びそのオートサンプラを備えた液体クロマトグラフ | |
| JP3815322B2 (ja) | 試料導入装置 | |
| JP4196516B2 (ja) | 液体クロマトグラフ | |
| US8939018B2 (en) | Analyzing device and method for controlling same | |
| JP2014106213A (ja) | 液体クロマトグラフ用オートサンプラ | |
| JP4567219B2 (ja) | 液体クロマトグラフ | |
| JP4720305B2 (ja) | オートサンプラ | |
| JP4447851B2 (ja) | 液体クロマトグラフ装置 | |
| JP4082333B2 (ja) | サンプリングニードルとそれを用いたオートサンプラ | |
| JPH07209145A (ja) | 液体クロマトグラフの自動前処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15893354 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2017520174 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15563425 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 15893354 Country of ref document: EP Kind code of ref document: A1 |