WO2016047476A1 - ブラシレスモータ - Google Patents
ブラシレスモータ Download PDFInfo
- Publication number
- WO2016047476A1 WO2016047476A1 PCT/JP2015/075950 JP2015075950W WO2016047476A1 WO 2016047476 A1 WO2016047476 A1 WO 2016047476A1 JP 2015075950 W JP2015075950 W JP 2015075950W WO 2016047476 A1 WO2016047476 A1 WO 2016047476A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- teeth
- brushless motor
- rotor
- magnet
- groove
- Prior art date
Links
Images





Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/14—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/14—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures
- H02K21/16—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures having annular armature cores with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/14—Stator cores with salient poles
- H02K1/146—Stator cores with salient poles consisting of a generally annular yoke with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/16—Stator cores with slots for windings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
- H02K1/272—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis
- H02K1/274—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2753—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets the rotor consisting of magnets or groups of magnets arranged with alternating polarity
- H02K1/278—Surface mounted magnets; Inset magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2201/00—Specific aspects not provided for in the other groups of this subclass relating to the magnetic circuits
- H02K2201/03—Machines characterised by aspects of the air-gap between rotor and stator
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2213/00—Specific aspects, not otherwise provided for and not covered by codes H02K2201/00 - H02K2211/00
- H02K2213/03—Machines characterised by numerical values, ranges, mathematical expressions or similar information
Definitions
- the present invention relates to a brushless motor with high torque and low cogging, and more particularly to a brushless motor suitable for application to a drive source of an electric power steering apparatus.
- a brushless motor according to the present invention is provided with a ring-shaped back core portion, a stator having a plurality of teeth projecting radially inward from the back core portion, and rotatably disposed inside the stator.
- a brushless motor having a rotor core mounted on a rotation shaft and a magnet disposed on an outer peripheral surface of the rotor core, wherein the teeth extend in a radial direction from the back core portion.
- width Wg is smaller than the width Wt of the teeth body, and is set to a value equal to or greater than 1 ⁇ 2 of the width Wt (Wt> Wg ⁇ Wt / 2).
- a groove is provided in the center of the tip end surface of the tooth, the depth d of the groove is set to 0 ⁇ d ⁇ (Lx ⁇ Rt) / 3, and the width Wg is set to Wt> Wg ⁇ Wt / 2.
- the bottom surface of the groove portion may be formed in an arc shape that is concentric with the front end surface with the center of the rotation shaft as the center.
- the outer peripheral surface of the magnet may be formed in an arc shape, and the outer peripheral surface of the magnet may be formed with a different curvature from the bottom surface of the groove and the tip surface. Thereby, the change of the magnetic flux between adjacent magnets can be smoothed, and the cogging torque can be reduced.
- the cross section perpendicular to the axial direction of the magnet may be formed in a D shape, and an arcuate outer peripheral surface and a planar inner peripheral surface may be provided. Thereby, the magnet center part becomes thick, the effective magnetic flux of the magnet can be increased, and the torque reduction accompanying the groove part installation is compensated.
- the cross-section of the rotor core is formed in a regular polygonal shape, and a flat surface portion to which the inner peripheral surface of the magnet is attached is provided on the outer peripheral surface thereof, and the adjacent flat surfaces accompanying the rotation of the rotor by the groove portion. You may relieve the fluctuation
- the axial length Ls of the stator core may be set longer than the axial length Lr of the rotor core (Ls> Lr). Thereby, leakage of magnetic flux from the axial end face can be suppressed, and cogging torque can be reduced.
- the rotor may have a skew structure, and the skew angle ⁇ may be set to 20 ° ⁇ ⁇ ⁇ 24 °.
- the order component related to the cogging torque in the induced voltage generated in the brushless motor having the 2P3S ⁇ n structure is suppressed, and the cogging torque is reduced.
- the brushless motor may be used as a drive source for the electric power steering apparatus.
- the brushless motor is a high torque / low cogging motor in which the cogging torque is reduced. By using this as a drive source of the electric power steering apparatus, a smooth and comfortable steering operation can be performed.
- a groove is provided in the center of the tooth tip surface, the depth d of the groove is 0 ⁇ d ⁇ (Lx ⁇ Rt) / 3, and the width Wg is Wt> Wg ⁇ Wt / 2.
- Lx distance from the center of the rotor to the teeth slant intersection X, which is the intersection of the extension line P of the circumferential side surface of the teeth body and the extension line Q of the slant surface of the slant
- Rt radius of the inner diameter of the tooth tip surface
- Wt Since the width of the tooth body is set, the slant portion protruding from the tip of the tooth is magnetically saturated, and the amount of magnetic flux flowing through the tooth can be controlled.
- the depth of the groove portion is shallow, the air gap in the groove portion can be reduced as compared with the conventional deep auxiliary groove, and the effective magnetic flux can be increased.
- the cogging torque can be reduced by controlling the amount of magnetic flux flowing through the teeth while securing the torque, and a brushless motor having a high torque and a low cogging torque can be provided.
- FIG. 2 is a cross-sectional view taken along line AA in FIG. It is an enlarged view which shows the structure of the teeth vicinity in the brushless motor of FIG. It is explanatory drawing which shows the movement state of the rotor core and magnet accompanying rotation of a rotor. It is a graph which shows the relationship between the depth d of a groove part, and a torque. It is explanatory drawing which shows the modification of a groove part shape. It is an enlarged view which shows the structure of the teeth vicinity in the conventional brushless motor.
- An object of the following embodiments is to provide a brushless motor having high torque and low cogging torque by reducing the cogging torque while minimizing a decrease in torque.
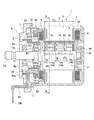
- FIG. 1 is a cross-sectional view showing a configuration of a brushless motor 1 (hereinafter abbreviated as motor 1) according to an embodiment of the present invention.
- FIG. 2 is a sectional view taken along line AA in FIG.
- the motor 1 is used as, for example, a power source of a column assist type EPS, and applies an operation assisting force to a steering shaft of an automobile while rotating forward and backward according to a steering operation direction.
- the motor 1 has an inner rotor type configuration in which a stator (stator) 2 is disposed on the outside and a rotor (rotor) 3 is disposed on the inside.
- the motor 1 is attached to a speed reduction mechanism (not shown) provided on the steering shaft. The rotation of the motor 1 is decelerated and transmitted to the steering shaft by the decelerating mechanism.
- the stator 2 is mounted in a housing 4 formed in a bottomed cylindrical shape with iron or the like.
- the housing 4 also serves as a motor case.
- the stator 2 is fixed to the inner peripheral surface of the housing 4 by fixing means such as press fitting.
- the stator 2 includes a stator core 5 and a coil 6 wound around the stator core 5.
- the stator core 5 is formed by laminating a large number of steel plate materials (for example, electromagnetic steel plates). As shown in FIG. 2, the stator core 5 has a ring-shaped back core portion 21 and a plurality of teeth 22.
- the teeth 22 protrude from the back core portion 21 at an equal interval toward the radially inner side.
- the coil 6 is wound around the tooth 22 via an insulator 23 made of synthetic resin.
- the teeth 22 are composed of a teeth main body 24 and a teeth tip portion 25.
- the teeth main body 24 extends in the radial direction from the back core portion 21 toward the inner side in the radial direction.
- the teeth tip portion 25 is formed integrally with the teeth body 24 on the inner diameter side of the teeth body 24.
- a pair of slant portions 26 extending in the circumferential direction project from both sides of the tooth tip portion 25 in the circumferential direction.
- An end surface on the inner diameter side of the tooth tip portion 25 is a tooth tip surface 27.
- the teeth tip surface 27 faces the rotor 3 with the air gap G interposed therebetween.
- a groove portion 28 is recessed in the center in the circumferential direction of the tooth tip surface 27.
- the groove portion 28 is recessed along the axial direction over the entire length of the stator core 5.
- a slot 29 is formed between adjacent teeth 22.
- the motor 1 has nine teeth 22 and has a nine-slot configuration.
- the coil 6 is accommodated in the slot 29.
- the opening width Wa between the adjacent teeth 22 is set wider than that of the conventional motor (see FIG. 7).
- the ratio of the teeth width to the opening width Wa is larger than that of the conventional motor, and is set to be approximately 18% larger than the ratio of the opening width between the teeth 51 to the circumferential width of the teeth 51 in the conventional motor.
- the opening width between the teeth is increased, the leakage inductance is reduced accordingly. As a result, the inductance is reduced and the rotational speed is increased.
- the widths of the teeth 22 and the back core portion 21 are also set to be larger than the ratio of the teeth 51 and the back core portion 55 of FIG. 7 (enlargement by about 19%).
- the widths of the teeth 22 and the back core portion 21 are increased, the magnetic path width is increased correspondingly, and magnetic saturation is suppressed. As a result, the leakage magnetic flux decreases and the effective magnetic flux also increases, thereby increasing the torque.
- a synthetic resin bus bar unit 7 is attached to one end of the stator core 5. After the bus bar unit 7 is attached, the stator core 5 is subjected to predetermined electrical connection as will be described later. After the electrical connection, the stator core 5 is press-fitted and fixed in the housing 4.
- a copper bus bar 31 is insert-molded in the main body of the bus bar unit 7. The bus bars 31 are provided in a number corresponding to the number of phases of the motor 1 (here, a total of four for U phase, V phase, W phase and one not shown for interphase connection). Each bus bar 31 has a plurality of power supply terminals 32 protruding in the radial direction. Around the bus bar unit 7, power supply terminals 32 protrude radially.
- An end portion 6 a of the coil 6 is drawn out at one end side of the stator core 5.
- the power supply terminal 32 is welded to the coil end portion 6a, and each coil 6 is electrically connected to the power supply terminal 32 corresponding to the phase.
- the end portion of the bus bar 31 extends in the axial direction from the end face of the bus bar unit 7 to form a bus bar terminal 33.
- the bracket 8 made of aluminum alloy is attached to the opening of the housing 4.
- a terminal unit 11 is fixed inside the bracket 8 by screws 9.
- a power terminal 34 to be joined to the bus bar terminal 33 is insert-molded in the terminal unit 11.
- the power terminal 34 is provided for each of U, V, and W phases.
- One end side 34 a of the power terminal 34 is disposed in the opening 35.
- the other end 34 b of the power terminal 34 is drawn out of the motor 1.
- the rotor 3 is inserted inside the stator 2.
- the rotor 3 has a shaft 12 serving as a motor rotation shaft.
- the shaft 12 is rotatably supported by ball bearings (hereinafter abbreviated as bearings) 13a and 13b.
- the bearing 13 a is fixed to a bearing accommodating portion 4 a formed at the center of the bottom of the housing 4.
- the bearing 13 b is fixed to a bearing fixing portion 8 a formed at the center portion of the bracket 8.
- the shaft 12 has three rotor cores 14 (14a to 14c) fixed in the axial direction.
- the rotor 3 has a step skew structure (here, three stages).
- the skew angle ⁇ is P for the number of poles
- S for the number of slots
- U 360 divided by the least common multiple of P and S
- V 360 / (P / 2) / 5 (“/ 5”: Is set in the range of U ⁇ ⁇ ⁇ V.
- the motor 1 is 6P9S, 20 ° ⁇ ⁇ ⁇ 24 °, which is set to 22 ° here. With such a setting, the order component (6P9S is 18th order) of cogging torque caused by the pole-slot relationship can be suppressed as compared with the conventional motor, and the cogging torque can be reduced.
- the rotor core 14 is also formed by laminating thin steel plate materials.
- Lr the total thickness of the rotor core 14
- Ls> Lr is set. That is, the axial length of the stator core 5 is longer than the axial length of the rotor core 14, and the stator core 5 is overhanging in the axial direction.
- the rotor 3 has an SPM (surface magnet type) structure.
- a magnet (permanent magnet) 15 is attached to the outer periphery of the rotor core 14 so as to face the teeth 22 through the air gap G.
- Six magnets 15 are attached along the circumferential direction, and the motor 1 has a 6-pole 9-slot (6P9S) configuration.
- a segment type magnet having an axial cross section (cross section perpendicular to the extending direction of the shaft 12) formed in a D shape is used as the magnet 15.
- the magnet 15 has an arcuate outer peripheral portion 15a and a planar inner peripheral portion 15b.
- the arc center Om of the outer peripheral portion 15 a is different from the center Or of the rotor 3, and the outer peripheral portion 15 a is eccentric with respect to the rotor 3. If the arc of the outer peripheral portion 15a is decentered, the magnetic flux change between the adjacent magnets 15 can be smoothed, and the cogging torque can be reduced.
- the magnet 15 having a D-shaped cross section has a larger dimension (thickness) at the center of the magnet than a conventional magnet having a circular arc on the inner and outer diameter sides.
- the outer diameter of the rotor 3 is smaller than that of the conventional motor (for example, ⁇ 45 ⁇ ⁇ 40: about 10% smaller diameter), and the rotor inertia is also reduced.
- the gap between the magnets also decreases. As a result, the magnetic flux density in the gap between the teeth and the magnet increases, and the torque can be increased also in this respect.
- the rotor core 14 has a substantially regular polygonal shape (here, a regular hexagon) because the rotor 15 has a plurality of (in this case, six) magnets 15 having a D-shaped section arranged in the circumferential direction.
- An inner peripheral portion 15 b of the magnet 15 is attached to the flat portion 16 a formed on the outer periphery of the rotor core 14.
- the magnet 15 is disposed on the outer periphery of the rotor cores 14a to 14c by a magnet holder 17 (17a to 17c) made of synthetic resin.
- Engaging grooves 19 for engaging the leg portions 18 of the magnet holder 17 are provided at the six corners of the rotor core 14.
- the engagement groove 19 is formed along the axial direction.
- the magnets 15 are arranged in three rows in the axial direction by the magnet holders 17a to 17c.
- a bottomed cylindrical magnet cover 20 is attached to the outside of the magnet 15.
- a resolver 41 serving as a rotation angle detecting means is disposed between the rotor 3 and the bracket 8 (on the left side in FIG. 1 of the rotor 3).
- the resolver 41 is composed of a resolver rotor 42 and a resolver stator 43 disposed outside the resolver rotor 42.
- the resolver rotor 42 is attached to the left end portion of the magnet holder 17 a and rotates together with the rotor 3.
- the resolver stator 43 is press-fitted and fixed in a metal resolver holder 44.
- the resolver holder 44 is formed in a bottomed cylindrical shape.
- a resolver mounting portion 8 b is projected from the center portion of the bracket 8.
- the resolver holder 44 is lightly press-fitted into the outer periphery of the resolver mounting portion 8 b and is fixed inside the bracket 8 together with the terminal unit 11 by screws 9.
- a magnet 15 having a D-shaped cross section is used to increase the torque.
- the inventors eliminated the auxiliary groove 52 from the configuration of FIG. 7 in order to increase the effective magnetic flux and further increase the torque.
- the auxiliary groove 52 is abolished, the torque is increased, but the cogging torque is increased.
- an increase in cogging torque is undesirable because it leads to a deterioration in steering feeling. Therefore, the causal relationship between the abolition of the auxiliary groove and the increase of cogging torque was examined. As a result, it was inferred that the increase in cogging torque was influenced by the provision of the flat portion 16a on the rotor core 14 with the adoption of the D-shaped magnet.
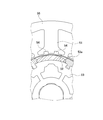
- FIG. 3 is an enlarged view showing the configuration in the vicinity of the tooth tip of the motor 1.
- FIG. 4 is an explanatory view showing a moving state of the rotor core 14 and the magnet 15 as the rotor 3 rotates. As shown in FIG. 4, when the rotor 3 rotates, the rotor core 14 and the magnet 15 also rotate. At this time, the distance Lg between the corner portion 16b between the adjacent flat portions 16a and the teeth 22 also varies. That is, the closer the corner 16b is to the center of the tooth 22, the smaller the distance Lg between the corner 16b and the tooth tip surface 27 is. In the configuration of FIG.
- the outer peripheral surface 53 a of the rotor core 53 is an arc concentric with the tip surface 51 a of the tooth 51, and the distance between the two does not vary even when the rotor rotates.
- the distance between the corner 16 b of the rotor core 14 and the tooth tip surface 27 is changed by the rotation of the rotor 3, and this is considered to be a factor in increasing the cogging torque.
- one groove portion 28 is formed on the tooth tip surface 27 in order to suppress the fluctuation of the distance Lg accompanying the rotation of the rotor 3.
- the groove part 28 is formed in the center of the front-end
- the depth d of the groove portion 28 is defined such that the distance from the center of the stator 2 (concentric with the center Or of the rotor 3) to the teeth slant intersection X is Lx, and the radius of the stator inner diameter (inner diameter of the tooth tip surface 27) is Rt.
- the value is set to 1/3 or less of the difference between Lx and Rt (0 ⁇ d ⁇ (Lx ⁇ Rt) / 3).
- the teeth slant intersection X means the intersection of the extension line P of the circumferential side surface 22 a of the tooth 22 and the extension line Q of the inclined surface 26 a of the slant portion 26 of the tooth 22.
- the width Wg of the groove portion 28 is smaller than the width Wt of the teeth body 24 and is set to a value equal to or greater than 1 ⁇ 2 of the width Wt (Wt> Wg> Wt / 2).
- the groove portion 28 is a kind of escape groove accompanying the passage of the corner portion 16b, the bottom surface 28a of the groove portion 28 is formed in an arc shape and is concentric with the stator 2 and the rotor 3.
- the groove part 28 has a relief groove-like configuration, and thus the depth is smaller (shallow) than the conventional auxiliary groove 54, and the groove part 28. The air gap G in the part can be reduced.
- the effective magnetic flux can be increased as compared with the conventional motor provided with the auxiliary groove 54, and the torque decrease due to the influence can be suppressed while the groove portion 28 is provided.
- torque is increased by using a D-shaped magnet, and the torque decrease due to the provision of the groove 28 is also compensated by this.
- the opening width Wa between the teeth 22 is set wider, and the slant portion 26 of the teeth 22 is smaller than that of the motor of FIG.
- the groove portion 28 is formed in each tooth 22, the width of the slant portion 26 is further reduced.
- the slant portion 26 is easily magnetically saturated, and the amount of magnetic flux flowing to the stator 2 side during non-energized rotation can be controlled. Therefore, the slant portion 26 can be magnetically saturated by setting the depth and width of the groove portion 28 to an appropriate size, and the cogging torque can be reduced also from this point.
- the cogging torque of the motor 1 is about It is suppressed to 12 mN ⁇ m or less.
- the motor 1 can suppress the cogging torque to about 12 mN ⁇ m or less while securing a torque of about 4.41 Nm by suppressing the torque drop to 4.5% or less, and the high torque / low cogging EPS. It is possible to achieve the optimum specifications for motors for use.
- the present invention is not limited to the above-described embodiments, and various modifications can be made without departing from the scope of the invention.
- 6P9S 6-pole 9-slot
- the present invention can be widely applied to motors having an integer multiple of 2P3S.
- an example of the stator core when the back core portion is integrally formed is shown.
- the present invention is also applied to a so-called split core type stator core in which the back core portion is divided in the circumferential direction. Is possible.
- the corner portions 28b on both sides of the groove portion 28 are square-shaped.
- the corner portion 28b is moved from the bottom surface 28a of the groove portion 28 to the tooth tip surface. 27 may be formed into a continuous curved surface shape. As a result, the change in the distance Lg becomes more gradual, and the cogging torque is further reduced.
- the brushless motor of the present invention can be widely applied to other electric devices mounted on automobiles, electric products such as hybrid cars, electric cars, and air conditioners in addition to the drive source of the electric power steering apparatus.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
- Permanent Field Magnets Of Synchronous Machinery (AREA)
Abstract
ティース22はティース本体24と先端部25を有する。ティース先端部25の周方向両側には一対のスラント部26が突設されている。先端部25の内径側端面には、マグネット15とエアギャップgを介して対向する先端面27が形成されている。先端面27の中央には軸方向に沿って延びる溝部28が凹設されている。溝部28の深さdは0<d≦(Lx-Rt)/3、幅WgはWt>Wg≧Wt/2に設定されている(Lx:ロータ中心から、ティース本体の周方向側面の延長線Pとスラント部傾斜面の延長線Qの交点であるティーススラント交点Xまでの距離,Rt:ティース先端面の内径の半径,Wt:ティース本体の幅)。
Description
本発明は、高トルク・低コギングのブラシレスモータに関し、特に、電動パワーステアリング装置の駆動源に適用して好適なブラシレスモータに関する。
自動車等の操舵力補助のため、近年多くの車両にいわゆるパワーステアリング装置が装備されている。パワーステアリング装置としては、近年、エンジン負荷軽減や重量低減等の観点から、電動モータを駆動源とした電気式の動力操舵装置(いわゆる電動パワーステアリング装置:EPS)が増大している。電動パワーステアリング装置の動力源であるモータには、複雑な制御が必要となるものの、メンテナンスの容易さからブラシレスモータが望ましい。昨今では、制御素子やコントローラの高性能化に伴い、ブラシレスモータを用いたEPSシステムが主流となりつつある。
一方、EPSシステムにおいては、モータのコギングトルクが大きくなると、無通電時における操舵フィーリングが悪化するという問題がある。EPS用のブラシレスモータでは、コギングトルクは重要な性能要素のひとつとなっている。従来より、コギングトルクの低減手法としては、特許文献1に示されているように、固定子界磁鉄心の突極先端部に補助溝を設けたり、回転子や固定子にスキューを施したりする方法が知られている。EPS用のブラシレスモータにも、補助溝やスキューなどの構成は多く採用されている。
しかしながら、コギングトルクを低減するために補助溝やスキューを設けても、必ずしも効率良くコギングトルクを低減できない。また、コギングを低減できても、補助溝やスキューの設置に伴い、トルクが低減してしまうという問題があった。トルクが低下してしまうと、所望の出力を得るためモータ体格を大きくせざるを得ず、モータの小型軽量化に対する要請に反する。
本発明のブラシレスモータは、リング状のバックコア部と、前記バックコア部から径方向内側に向かって突設された複数個のティースを備えたステータと、前記ステータの内側に回転自在に配置され、回転軸上に装着されたロータコアと、前記ロータコアの外周面に配置されたマグネットと、を備えたロータと、を有するブラシレスモータであって、前記ティースは、前記バックコア部から径方向に延びるティース本体と、前記ティース本体の内径側に該ティース本体と一体に形成され、その周方向両側に周方向に沿って延びる一対のスラント部が突設された先端部と、前記先端部の内径側端面に形成され、前記マグネットとエアギャップを介して対向する先端面と、前記先端面の周方向中央に凹設され、前記回転軸方向に沿って延びる溝部、とを有し、前記溝部は、深さdが、前記ロータの中心から前記ティース本体の周方向側面の延長線Pと前記スラント部の傾斜面の延長線Qの交点であるティーススラント交点Xまでの距離をLx、前記先端面の内径の半径をRtとしたとき、前記Lxと前記Rtの差の1/3以下の値に設定されており(0<d≦(Lx-Rt)/3)、かつ、幅Wgが、前記ティース本体の幅Wtよりも小さく、前記幅Wtの1/2以上の値に設定されている(Wt>Wg≧Wt/2)ことを特徴とする。
本発明にあっては、ティース先端面の中央に溝部を凹設し、当該溝部の深さdを0<d≦(Lx-Rt)/3、幅WgをWt>Wg≧Wt/2に設定することにより、スラント部を磁気飽和させて、無通電回転時にティース内に流入する磁束量を制御でき、コギングトルクを低減させることが可能となる。また、従来の補助溝よりも深さを小さくすることにより、溝部におけるエアギャップを小さくでき、有効磁束を増大させ、トルクの減少量を少なく抑えられる。
前記ブラシレスモータにおいて、前記溝部の底面を、前記回転軸の中心を中心とする、前記先端面と同心の円弧状に形成しても良い。これにより、ティース先端部におけるエアギャップが均等に近付くため、コギングトルクの低減が図られる。
前記マグネットの外周面を円弧状に形成すると共に、前記マグネットの外周面を、前記溝部の底面及び前記先端面とは異なる曲率に形成しても良い。これにより、隣接するマグネット間での磁束の変化を滑らかにでき、コギングトルクの低減が図られる。
前記マグネットの軸方向に垂直な断面をD形に形成し、円弧状の外周面と平面状の内周面を設けても良い。これにより、マグネット中央部が厚くなり、マグネットの有効磁束を増加させることができ、溝部設置に伴うトルク減少が補填される。また、前記ロータコアの断面を正多角形状に形成し、その外周面に、前記マグネットの前記内周面が取り付けられる平面部を設けると共に、前記溝部により、前記ロータの回転に伴う、隣接する前記平面部の間に形成された角部と前記ティースとの間の距離の変動を緩和させても良い。
前記ステータコアの軸方向長Lsを前記ロータコアの軸方向長Lrより長く(Ls>Lr)設定しても良い。これにより、軸方向端面からの磁束の漏れを抑制でき、コギングトルクの低減が図られる。
前記ロータをスキュー構造とし、そのスキュー角θを20°≦θ≦24°に設定しても良い。これにより、例えば、2P3S×n構造のブラシレスモータに生じる誘起電圧のうちコギングトルクに関与する次数成分が抑制され、コギングトルクの低減が図られる。
また、前記ブラシレスモータを電動パワーステアリング装置の駆動源として使用しても良い。当該ブラシレスモータは、コギングトルクの低減が図られた、高トルク・低コギングのモータであり、これを電動パワーステアリング装置の駆動源として使用することにより、スムーズで快適なステアリング操作が可能となる。
本発明のブラシレスモータによれば、ティース先端面の中央に溝部を凹設し、当該溝部の深さdを0<d≦(Lx-Rt)/3、幅WgをWt>Wg≧Wt/2(Lx:ロータ中心から、ティース本体の周方向側面の延長線Pとスラント部傾斜面の延長線Qの交点であるティーススラント交点Xまでの距離,Rt:ティース先端面の内径の半径,Wt:ティース本体の幅)に設定したので、ティース先端部に突設されたスラント部を磁気飽和させ、ティースに流れる磁束の量を制御することが可能となる。また、溝部の深さが浅いため、従来の深い補助溝に比して、溝部におけるエアギャップを小さくでき、有効磁束を増大させることが可能となる。その結果、トルクを確保しつつ、ティースに流れる磁束量を制御してコギングトルクの低減を図ることでき、高トルク・低コギングトルクのブラシレスモータを提供することが可能となる。
以下、本発明の実施の形態を図面に基づいて詳細に説明する。以下の実施形態の目的は、トルクの低下を最小限としつつ、コギングトルクの低減を図り、高トルク・低コギングトルクのブラシレスモータを提供することにある。
図1は、本発明の一実施の形態であるブラシレスモータ1(以下、モータ1と略記する)の構成を示す断面図である。図2は、図1のA-A線に沿った断面図である。モータ1は、例えば、コラムアシスト式EPSの動力源として使用され、ハンドル操作方向に応じて正逆回転しつつ、自動車のステアリングシャフトに対し動作補助力を付与する。図1に示すように、モータ1は、外側にステータ(固定子)2、内側にロータ(回転子)3を配したインナーロータ型の構成となっている。モータ1は、ステアリングシャフトに設けられた図示しない減速機構部に取り付けられる。モータ1の回転は、この減速機構部によってステアリングシャフトに減速されて伝達される。
ステータ2は、鉄等にて有底円筒状に形成されたハウジング4内に取り付けられている。ハウジング4は、モータケースを兼ねている。ステータ2は、ハウジング4の内周面に、圧入等の固定手段により固定される。ステータ2は、ステータコア5と、ステータコア5に巻装されたコイル6とを備えている。ステータコア5は、鋼製の板材(例えば、電磁鋼板)を多数積層して形成されている。図2に示すように、ステータコア5は、リング状のバックコア部21と、複数個のティース22を有している。ティース22は、バックコア部21から、径方向内側に向かって、等間隔で突設されている。ティース22には、合成樹脂製のインシュレータ23を介して、コイル6が巻装されている。
ティース22は、ティース本体24と、ティース先端部25とから構成されている。ティース本体24は、バックコア部21から径方向内側に向かって、径方向に延びている。ティース先端部25は、ティース本体24の内径側に、ティース本体24と一体に形成されている。ティース先端部25の周方向両側には、周方向に向かって延びる一対のスラント部26が突設されている。ティース先端部25の内径側端面は、ティース先端面27となっている。ティース先端面27は、ロータ3とエアギャップGを介して対向している。ティース先端面27の周方向中央には、溝部28が凹設されている。溝部28は、軸方向に沿って、ステータコア5の全長に亘って凹設されている。
隣接するティース22の間には、スロット29が形成されている。モータ1では、ティース22は9個設けられており、9スロット構成となっている。スロット29内にはコイル6が収容される。モータ1では、隣接するティース22間の開口幅Waが、従来のモータ(図7参照)よりも広く設定されている。モータ1では、ティース幅と開口幅Waの比が従来のモータよりも大きく、従来のモータにおける、ティース51の周方向の幅に対するティース51間の開口幅の比率に対して、約18%大きく設定されている。ティース間の開口幅が大きくなると、その分、漏れインダクタンスが低減される。その結果、インダクタンスが低下し、回転数アップが図られる。また、ティース22やバックコア部21の幅も、図7のティース51やバックコア部55の比率に対して大きく設定されている(約19%拡大)。ティース22やバックコア部21の幅が大きくなると、その分、磁路幅が増大し、磁気飽和が抑制される。その結果、漏れ磁束が低下すると共に有効磁束も増大し、トルクアップが図られる。
ステータコア5の一端側には、合成樹脂製のバスバーユニット7が取り付けられる。ステータコア5は、バスバーユニット7を取り付けた後、後述する様に所定の電気的な接続が施される。電気的な接続の後、ステータコア5は、ハウジング4内に圧入固定される。バスバーユニット7の本体部内には、銅製のバスバー31がインサート成形されている。バスバー31は、モータ1の相数に対応した個数(ここでは、U相,V相,W相分の3個と、相間接続用の図示しない1個の計4個)設けられている。各バスバー31には、複数個の給電用端子32が径方向に突設されている。バスバーユニット7の周囲には、給電用端子32が放射状に突出している。ステータコア5の一端側には、コイル6の端部6aが引き出されている。バスバーユニット7の取り付けに際し、給電用端子32はコイル端部6aと溶接され、各コイル6は、その相に対応した給電用端子32と電気的に接続される。バスバー31の端部は、バスバーユニット7の端面から軸方向に延出され、バスバー端子33を形成している。
ハウジング4の開口部には、アルミニウム合金製のブラケット8が取り付けられる。ブラケット8の内側には、ねじ9によって、ターミナルユニット11が固定される。ターミナルユニット11には、バスバー端子33と接合されるパワーターミナル34がインサート成形されている。パワーターミナル34は、U,V,Wの各相ごとに設けられている。パワーターミナル34の一端側34aは、開口部35内に配置されている。パワーターミナル34の他端側34bは、モータ1の外部に引き出されている。ブラケット8をハウジング4に組み付けると、バスバーユニット7から軸方向に延びるバスバー端子33が、開口部35内にてパワーターミナル34と並列に対向する。モータ1では、ハウジング4にブラケット8を取り付けた後、開口部35内にて、バスバー端子33とパワーターミナル34を溶接固定する。
ステータ2の内側には、ロータ3が挿入される。ロータ3は、モータ回転軸となるシャフト12を有している。シャフト12は、ボールベアリング(以下、ベアリングと略記する)13a,13bによって回転自在に支持されている。ベアリング13aは、ハウジング4の底部中央に形成されたベアリング収容部4aに固定されている。ベアリング13bは、ブラケット8の中央部に形成されたベアリング固定部8aに固定されている。
シャフト12には、ロータコア14が軸方向に3個(14a~14c)固定されている。ロータ3は、ステップスキュー構造(ここでは3段)となっている。この場合、スキュー角θは、極数をP、スロット数をS、Uは360をPとSの最小公倍数で割った数、V=360/(P/2)/5(「/5」:5次成分を考慮)としたとき、U≦θ≦Vの範囲に設定されている。モータ1は、6P9Sであることから、20°≦θ≦24°となり、ここでは22°に設定されている。このような設定により、従来のモータに比して、極-スロット関係により生じるコギングトルクの次数成分(6P9Sは18次)を抑制でき、コギングトルクの低減が図られる。
ロータコア14もまた、鋼製の薄板材を積層して形成されている。モータ1では、ロータコア14の積厚の合計をLr、ステータコア5の積厚をLsとしたとき、Ls>Lrに設定されている。つまり、ステータコア5の軸方向長の方が、ロータコア14の軸方向長よりも長くなっており、ステータコア5が軸方向にオーバーハングした状態となっている。ステータ側をロータ側より長くすることにより、軸方向からの磁束の漏れが抑制され、コギングトルクの低減が図られる。
ロータ3はSPM(表面磁石型)構造となっている。ロータコア14の外周には、エアギャップGを介してティース22と対向するように、マグネット(永久磁石)15が取り付けられている。マグネット15は、周方向に沿って6個取り付けられており、モータ1は、6極9スロット(6P9S)構成となっている。図2に示すように、モータ1では、マグネット15として、軸方向断面(シャフト12の延伸方向に垂直な断面)がD形に形成されたセグメントタイプのマグネットが使用されている。マグネット15は、円弧状の外周部15aと、平面状の内周部15bを有している。外周部15aの円弧中心Omは、ロータ3の中心Orと異なっており、外周部15aは、ロータ3に対し偏心している。外周部15aの円弧を偏心させると、隣接するマグネット15間の磁束変化を滑らかにでき、コギングトルクの低減が図られる。
D形断面のマグネット15は、内外径側の面が円弧状となっている従来のマグネットに比して、マグネット中央部の寸法(厚み)が大きくなる。その結果、有効磁束量が大きくなると共に、インダクタンスも低下し、その分、トルクアップが図られる。ロータ3は、その外径も従来のモータより小径化されており(例えば、φ45→φ40:約10%小径化)、ロータイナーシャも低減されている。また、外径が小さくなるに伴い、マグネット間の間隙も小さくなる。その結果、ティース-マグネット間のギャップにおける磁束密度が増大し、この点においてもトルクアップが図られる。
ロータコア14は、D形断面のマグネット15を、周方向に複数個(ここでは6個)等分に配置するため、断面が概略正多角形状(ここでは正六角形)となっている。ロータコア14の外周に形成された平面部16aには、マグネット15の内周部15bが取り付けられる。マグネット15は、合成樹脂製のマグネットホルダ17(17a~17c)によって、ロータコア14a~14cの外周に配される。ロータコア14の6つの角部には、マグネットホルダ17の脚部18が係合する係合溝19が設けられている。係合溝19は、軸方向に沿って形成されている。マグネット15は、マグネットホルダ17a~17cによって軸方向に3列配置される。マグネット15の外側には、有底円筒形状のマグネットカバー20が取り付けられる。
ロータ3とブラケット8との間(ロータ3の図1において左側)には、回転角度検出手段であるレゾルバ41が配置されている。レゾルバ41は、レゾルバロータ42と、レゾルバロータ42の外側に配されたレゾルバステータ43とから構成されている。レゾルバロータ42は、マグネットホルダ17aの左端部に取り付けられており、ロータ3と共に回転する。レゾルバステータ43は、金属製のレゾルバホルダ44内に圧入固定されている。レゾルバホルダ44は、有底円筒形状に形成されている。ブラケット8の中央部には、レゾルバ取付部8bが突設されている。レゾルバホルダ44は、レゾルバ取付部8bの外周に軽圧入され、ねじ9によって、ターミナルユニット11と共にブラケット8の内側に固定される。
モータ1では、トルクアップのため、D形断面のマグネット15が使用されている。一方、発明者らは、有効磁束を増加させ、更なるトルクアップを図るべく、図7の構成から補助溝52を廃止した。ところが、補助溝52を廃止すると、トルクはアップするものの、コギングトルクが大きくなってしまうという問題が生じた。EPS用のブラシレスモータにとって、コギングトルクの増加は、操舵フィーリングの悪化につながり好ましくない。そこで、補助溝廃止とコギングトルク増大との因果関係を検討した。その結果、コギングトルクの増加には、D形マグネットの採用に伴い、ロータコア14に平面部16aを設けたことが影響していることが推認された。
図3は、モータ1におけるティース先端部近傍の構成を示す拡大図、である。図4は、ロータ3の回転に伴う、ロータコア14とマグネット15の移動状態を示す説明図である。図4に示すように、ロータ3が回転すると、ロータコア14とマグネット15も回転し、その際、隣接する平面部16aの間の角部16bとティース22との間の距離Lgも変動する。すなわち、角部16bがティース22の中心に近付くほど、角部16bとティース先端面27の間の距離Lgも小さくなる。図7の構成では、ロータコア53の外周面53aは、ティース51の先端面51aと同心状の円弧となっており、ロータが回転しても両者間の距離は変動しない。これに対し、モータ1では、ロータコア14の角部16bとティース先端面27の距離がロータ3の回転により変化し、これがコギングトルク増大の一因となっているとも考えられる。
そこで、本発明によるモータ1では、ロータ3の回転に伴う距離Lgの変動を抑えるべく、ティース先端面27に溝部28が1個形成されている。溝部28は、各ティース22の先端部中央に形成されており、軸方向に沿って、ロータコア14の全長に亘って凹設されている。溝部28の深さdは、ステータ2の中心(ロータ3の中心Orと同心)からティーススラント交点Xまでの距離をLx、ステータ内径(ティース先端面27の内径)の半径をRtとしたとき、LxとRtの差の1/3以下の値に設定されている(0<d≦(Lx-Rt)/3)。ティーススラント交点Xとは、ティース22の周方向側面22aの延長線Pと、ティース22のスラント部26の傾斜面26aの延長線Qの交点を意味している。
溝部28の幅Wgは、ティース本体24の幅Wtよりも小さく、かつ、幅Wtの1/2以上の値に設定されている(Wt>Wg>Wt/2)。加えて、溝部28は、角部16bの通過に伴う一種の逃げ溝であることから、溝部28の底面28aは円弧状に形成されており、ステータ2やロータ3と同心状となっている。
このような溝部28をティース先端面27に形成することにより、ロータコア角部16bとティース先端面27の間の距離Lgの変動が緩和され(小さくなり)、コギングトルクの低減を図ることが可能となる。また、溝部28は、底面28aが円弧状のため、距離Lgと共に、マグネット-ティース間のエアギャップGを均等化でき、この点からもコギングトルクの低減が図られる。さらに、溝部28は、図7の補助溝54のような疑似スロット的な溝とは異なり、逃げ溝的な構成であるため、従来の補助溝54よりも深さが小さく(浅く)、溝部28の部位におけるエアギャップGを小さくできる。その結果、補助溝54を設けた従来のモータよりも有効磁束を増大させることができ、溝部28を設けつつも、その影響によるトルク減少を少なく抑えられる。なお、モータ1では、D形マグネットの使用によりトルクアップが図られており、溝部28を設けたことによるトルク減少分はこれによっても補填される。
加えて、モータ1においては、ティース22間の開口幅Waが広めに設定され、ティース22のスラント部26が図7のモータに比して小さい。その上、各ティース22には溝部28が形成されているため、スラント部26の幅がさらに小さくなる。その結果、スラント部26が磁気飽和し易くなり、無通電回転時にステータ2側に流れる磁束量をコントロールできる。従って、溝部28の深さや幅を適切な大きさに設定することにより、スラント部26を磁気飽和させることができ、この点からもコギングトルクの低減が図られる。
例えば、半径Rt=21mmのモータ1において、溝部28の深さdを0.63mm、幅Wgを4.9mmに設定することにより、発明者らの解析によれば、モータ1のコギングトルクは約12mN・m以下に抑えられる。また、図5に示すように、d=0.63mmの場合のトルクは約4.41Nmとなる。溝部28を形成しない場合のトルクは約4.62Nmとなることから、溝部形成によるトルクの低下は約4.5%以下に抑えられる。すなわち、モータ1は、トルク低下を4.5%以下に抑えて約4.41Nmのトルクを確保しつつ、コギングトルクを約12mN・m以下に抑えることが可能となり、高トルク・低コギングのEPS用のモータとしては最適な仕様を実現できる。
本発明は前述のような実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能であることは言うまでもない。
例えば、前述の実施形態では、6極9スロット(6P9S)構成のブラシレスモータに本発明を適用した例を示したが、本発明は、2P3Sの整数倍の構成のモータに広く適用可能である。また、前述の実施形態では、バックコア部が一体成形された場合のステータコアについての例を示したが、バックコア部が周方向に分割された、いわゆる分割コア方式のステータコアにも本発明は適用可能である。さらに、前述の実施形態では、溝部28の両側の隅部28bが角形状のものについての例を示したが、図6に示すように、隅部28bを、溝部28の底面28aからティース先端面27にかけて連続的な曲面形状に形成しても良い。これにより、距離Lgの変化がさらに緩やかとなり、コギングトルクがより低減される。
例えば、前述の実施形態では、6極9スロット(6P9S)構成のブラシレスモータに本発明を適用した例を示したが、本発明は、2P3Sの整数倍の構成のモータに広く適用可能である。また、前述の実施形態では、バックコア部が一体成形された場合のステータコアについての例を示したが、バックコア部が周方向に分割された、いわゆる分割コア方式のステータコアにも本発明は適用可能である。さらに、前述の実施形態では、溝部28の両側の隅部28bが角形状のものについての例を示したが、図6に示すように、隅部28bを、溝部28の底面28aからティース先端面27にかけて連続的な曲面形状に形成しても良い。これにより、距離Lgの変化がさらに緩やかとなり、コギングトルクがより低減される。
本発明のブラシレスモータは、電動パワーステアリング装置の駆動源以外にも、自動車に搭載される他の電動装置や、ハイブリッド自動車、電気自動車、エアコン等の電気製品等にも広く適用可能である。
1 ブラシレスモータ 2 ステータ
3 ロータ 4 ハウジング
4a ベアリング収容部 5 ステータコア
6 コイル 6a コイル端部
7 バスバーユニット 8 ブラケット
8a ベアリング固定部 8b レゾルバ取付部
9 ねじ 11 ターミナルユニット
12 シャフト 13a,13b ベアリング
14 ロータコア 14a~14c ロータコア
15 マグネット 15a 外周部
15b 内周部 16a ロータコア平面部
16b ロータコア角部 17 マグネットホルダ
17a~17c マグネットホルダ 18 マグネットホルダ脚部
19 係合溝 20 マグネットカバー
21 バックコア部 22 ティース
22a 周方向側面 23 インシュレータ
24 ティース本体 25 ティース先端部
26 スラント部 26a 傾斜面
27 ティース先端面 28 溝部
28a 底面 28b 隅部
29 スロット 31 バスバー
32 給電用端子 33 バスバー端子
34 パワーターミナル 34a 一端側
34b 他端側 35 開口部
41 レゾルバ 42 レゾルバロータ
43 レゾルバステータ 44 レゾルバホルダ
51 ティース 51a 先端面
52 補助溝 53 ロータコア
53a 外周面 54 補助溝
55 バックコア部 d 溝部深さ
P ティース本体の周方向側面の延長線
Q スラント部傾斜面の延長線 X ティーススラント交点
Or ロータ中心(=ステータ中心)
Lx ステータ中心-ティーススラント交点X間距離
Rt ティース先端面内径半径
Wg 溝部周方向幅 Wt ティース本体周方向幅
G エアギャップ
Lg ロータコア角部-ティース先端面間距離
Wa ティース間開口幅 Om マグネット外周部円弧中心
θ スキュー角 Lr ロータコア軸方向長
Ls ステータコア軸方向長
3 ロータ 4 ハウジング
4a ベアリング収容部 5 ステータコア
6 コイル 6a コイル端部
7 バスバーユニット 8 ブラケット
8a ベアリング固定部 8b レゾルバ取付部
9 ねじ 11 ターミナルユニット
12 シャフト 13a,13b ベアリング
14 ロータコア 14a~14c ロータコア
15 マグネット 15a 外周部
15b 内周部 16a ロータコア平面部
16b ロータコア角部 17 マグネットホルダ
17a~17c マグネットホルダ 18 マグネットホルダ脚部
19 係合溝 20 マグネットカバー
21 バックコア部 22 ティース
22a 周方向側面 23 インシュレータ
24 ティース本体 25 ティース先端部
26 スラント部 26a 傾斜面
27 ティース先端面 28 溝部
28a 底面 28b 隅部
29 スロット 31 バスバー
32 給電用端子 33 バスバー端子
34 パワーターミナル 34a 一端側
34b 他端側 35 開口部
41 レゾルバ 42 レゾルバロータ
43 レゾルバステータ 44 レゾルバホルダ
51 ティース 51a 先端面
52 補助溝 53 ロータコア
53a 外周面 54 補助溝
55 バックコア部 d 溝部深さ
P ティース本体の周方向側面の延長線
Q スラント部傾斜面の延長線 X ティーススラント交点
Or ロータ中心(=ステータ中心)
Lx ステータ中心-ティーススラント交点X間距離
Rt ティース先端面内径半径
Wg 溝部周方向幅 Wt ティース本体周方向幅
G エアギャップ
Lg ロータコア角部-ティース先端面間距離
Wa ティース間開口幅 Om マグネット外周部円弧中心
θ スキュー角 Lr ロータコア軸方向長
Ls ステータコア軸方向長
Claims (8)
- リング状のバックコア部と、前記バックコア部から径方向内側に向かって突設された複数個のティースを備えたステータと、
前記ステータの内側に回転自在に配置され、回転軸上に装着されたロータコアと、前記ロータコアの外周面に配置されたマグネットと、を備えたロータと、を有するブラシレスモータであって、
前記ティースは、
前記バックコア部から径方向に延びるティース本体と、
前記ティース本体の内径側に該ティース本体と一体に形成され、その周方向両側に周方向に沿って延びる一対のスラント部が突設された先端部と、
前記先端部の内径側端面に形成され、前記マグネットとエアギャップを介して対向する先端面と、
前記先端面の周方向中央に凹設され、前記回転軸方向に沿って延びる溝部、とを有し、
前記溝部は、
深さdが、前記ロータの中心から前記ティース本体の周方向側面の延長線Pと前記スラント部の傾斜面の延長線Qの交点であるティーススラント交点Xまでの距離をLx、前記先端面の内径の半径をRtとしたとき、前記Lxと前記Rtの差の1/3以下の値に設定されており(0<d≦(Lx-Rt)/3)、かつ、
幅Wgが、前記ティース本体の幅Wtよりも小さく、前記幅Wtの1/2以上の値に設定されている(Wt>Wg≧Wt/2)ことを特徴とするブラシレスモータ。 - 請求項1記載のブラシレスモータにおいて、
前記溝部の底面は、前記回転軸の中心を中心とする、前記先端面と同心の円弧状に形成されてなることを特徴とするブラシレスモータ。 - 請求項1又は2記載のブラシレスモータにおいて、
前記マグネットは外周面が円弧状に形成され、
前記マグネットの外周面は、前記溝部の底面及び前記先端面とは異なる曲率に形成されてなることを特徴とするブラシレスモータ。 - 請求項1~3の何れか1項に記載のブラシレスモータにおいて、
前記マグネットは、軸方向に垂直な断面がD形に形成され、円弧状の外周面と、平面状の内周面を有することを特徴とするブラシレスモータ。 - 請求項4記載のブラシレスモータにおいて、
前記ロータコアは、断面が正多角形状に形成され、その外周面には、前記マグネットの前記内周面が取り付けられる平面部を有し、
前記溝部は、前記ロータの回転に伴う、隣接する前記平面部の間に形成された角部と前記ティースとの間の距離の変動を緩和するよう形成されてなることを特徴とするブラシレスモータ。 - 請求項1~5の何れか1項に記載のブラシレスモータにおいて、
前記ステータコアの軸方向長Lsは、前記ロータコアの軸方向長Lrより長い(Ls>Lr)ことを特徴とするブラシレスモータ。 - 請求項1~6の何れか1項に記載のブラシレスモータにおいて、
前記ロータはスキュー構造を有し、そのスキュー角θが20°≦θ≦24°に設定されていることを特徴とするブラシレスモータ。 - 請求項1~7の何れか1項に記載のブラシレスモータにおいて、
前記ブラシレスモータは、電動パワーステアリング装置の駆動源として使用されることを特徴とするブラシレスモータ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15843528.9A EP3200318A4 (en) | 2014-09-22 | 2015-09-14 | Brushless motor |
| CN201580050722.0A CN106716783A (zh) | 2014-09-22 | 2015-09-14 | 无刷马达 |
| US15/510,462 US20170288517A1 (en) | 2014-09-22 | 2015-09-14 | Brushless motor |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014-192774 | 2014-09-22 | ||
| JP2014192774A JP6411833B2 (ja) | 2014-09-22 | 2014-09-22 | ブラシレスモータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016047476A1 true WO2016047476A1 (ja) | 2016-03-31 |
Family
ID=55581003
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/075950 WO2016047476A1 (ja) | 2014-09-22 | 2015-09-14 | ブラシレスモータ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20170288517A1 (ja) |
| EP (1) | EP3200318A4 (ja) |
| JP (1) | JP6411833B2 (ja) |
| CN (1) | CN106716783A (ja) |
| WO (1) | WO2016047476A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220052566A1 (en) * | 2018-09-18 | 2022-02-17 | Daegu Gyeongbuk Institute Of Science And Technology | Stator and motor assembly including same |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017090189A1 (ja) * | 2015-11-27 | 2017-06-01 | 三菱電機株式会社 | 回転電機 |
| GB2553362A (en) * | 2016-09-05 | 2018-03-07 | Edwards Ltd | Vacuum pump assembly |
| CN106385154A (zh) * | 2016-09-26 | 2017-02-08 | 上海特波电机有限公司 | 外转子无刷永磁电机 |
| US20190356186A1 (en) * | 2016-12-28 | 2019-11-21 | Nidec Corporation | Rotor and motor |
| US10916980B2 (en) * | 2016-12-28 | 2021-02-09 | Nidec Corporation | Rotor with first and second rotating body stacked vertically having core surfaces axially arranged with different curvature radiuses |
| CN110036552B (zh) * | 2017-04-05 | 2020-09-22 | 三菱电机株式会社 | 定子芯构成片及旋转电机 |
| US11289960B2 (en) | 2017-07-20 | 2022-03-29 | Mitsuba Corporation | Motor and brushless wiper motor |
| JP7077153B2 (ja) * | 2017-07-20 | 2022-05-30 | 株式会社ミツバ | モータ及びブラシレスワイパーモータ |
| CN107742966B (zh) * | 2017-10-28 | 2020-10-23 | 珠海磐磊智能科技有限公司 | 电机 |
| TWI663812B (zh) * | 2017-11-07 | 2019-06-21 | 財團法人工業技術研究院 | 具有低頓轉矩之電動機 |
| CN108336836B (zh) * | 2017-11-22 | 2020-07-28 | 珠海磐磊智能科技有限公司 | 电机 |
| US10734876B2 (en) | 2018-03-19 | 2020-08-04 | Denso International America, Inc. | Brushless motor for HVAC system |
| JP7415938B2 (ja) * | 2018-10-26 | 2024-01-17 | ニデック株式会社 | 表面磁石型モータおよびモータモジュール |
| CN109660076B (zh) * | 2018-11-24 | 2022-05-13 | 乐清市吴林电器实业有限公司 | 汽车eps用无刷电机 |
| JP7334453B2 (ja) * | 2019-04-19 | 2023-08-29 | 株式会社デンソー | 回転電機 |
| EP3985836A4 (en) * | 2019-06-11 | 2022-08-10 | LG Innotek Co., Ltd. | ENGINE |
| JP7115431B2 (ja) * | 2019-07-17 | 2022-08-09 | 株式会社デンソー | 回転電機 |
| JP2022051989A (ja) * | 2020-09-23 | 2022-04-04 | 日立グローバルライフソリューションズ株式会社 | 電動機および洗濯機 |
| JP7475482B2 (ja) * | 2020-10-27 | 2024-04-26 | 三菱電機株式会社 | 回転電機および電動パワーステアリング装置 |
| TWI770903B (zh) * | 2021-03-26 | 2022-07-11 | 東元電機股份有限公司 | 具有定子齒部削弧結構之定子齒 |
| CN114172283B (zh) * | 2021-12-07 | 2023-03-14 | 珠海格力电器股份有限公司 | 定子冲片、定子铁芯、电机、车辆 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5757100A (en) * | 1995-08-28 | 1998-05-26 | Papst-Motoren Gmbh & Co., Kg | Method & apparatus for reducing cogging torque in an electric motor |
| JP2004194489A (ja) * | 2002-12-13 | 2004-07-08 | Mitsuba Corp | ブラシレスモータ |
| JP2009213284A (ja) * | 2008-03-05 | 2009-09-17 | Mitsuba Corp | ブラシレスモータ |
| WO2009119734A1 (ja) * | 2008-03-26 | 2009-10-01 | 日本電産株式会社 | モータ |
| JP2013223281A (ja) * | 2012-04-13 | 2013-10-28 | Jtekt Corp | 電動モータ |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE60302116T2 (de) * | 2002-08-08 | 2006-07-27 | Daido Tokushuko K.K., Nagoya | Bürstenloser Motor |
| US20080024028A1 (en) * | 2006-07-27 | 2008-01-31 | Islam Mohammad S | Permanent magnet electric motor |
| WO2012032591A1 (ja) * | 2010-09-06 | 2012-03-15 | 三菱電機株式会社 | 永久磁石型回転電機及びそれを用いた電動パワーステアリング装置 |
-
2014
- 2014-09-22 JP JP2014192774A patent/JP6411833B2/ja active Active
-
2015
- 2015-09-14 EP EP15843528.9A patent/EP3200318A4/en not_active Ceased
- 2015-09-14 CN CN201580050722.0A patent/CN106716783A/zh active Pending
- 2015-09-14 US US15/510,462 patent/US20170288517A1/en not_active Abandoned
- 2015-09-14 WO PCT/JP2015/075950 patent/WO2016047476A1/ja active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5757100A (en) * | 1995-08-28 | 1998-05-26 | Papst-Motoren Gmbh & Co., Kg | Method & apparatus for reducing cogging torque in an electric motor |
| JP2004194489A (ja) * | 2002-12-13 | 2004-07-08 | Mitsuba Corp | ブラシレスモータ |
| JP2009213284A (ja) * | 2008-03-05 | 2009-09-17 | Mitsuba Corp | ブラシレスモータ |
| WO2009119734A1 (ja) * | 2008-03-26 | 2009-10-01 | 日本電産株式会社 | モータ |
| JP2013223281A (ja) * | 2012-04-13 | 2013-10-28 | Jtekt Corp | 電動モータ |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3200318A4 * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220052566A1 (en) * | 2018-09-18 | 2022-02-17 | Daegu Gyeongbuk Institute Of Science And Technology | Stator and motor assembly including same |
| US11955841B2 (en) * | 2018-09-18 | 2024-04-09 | Daegu Gyeongbuk Institute Of Science And Technology | Stator and motor assembly including same |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6411833B2 (ja) | 2018-10-24 |
| CN106716783A (zh) | 2017-05-24 |
| EP3200318A4 (en) | 2018-05-09 |
| US20170288517A1 (en) | 2017-10-05 |
| JP2016063728A (ja) | 2016-04-25 |
| EP3200318A1 (en) | 2017-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6411833B2 (ja) | ブラシレスモータ | |
| JP6226867B2 (ja) | ブラシレスモータ及びブラシレスモータ用ロータ | |
| JP5523112B2 (ja) | ブラシレスモータ | |
| JP4269953B2 (ja) | 回転電機 | |
| US9490673B2 (en) | Rotor of magnet-assisted reluctance motor and brushless motor | |
| US9172278B2 (en) | Permanent magnet type rotary electric machine and electric power steering apparatus using the same | |
| JP5945728B2 (ja) | ブラシレスモータおよびそれを搭載した電気機器 | |
| JP4640422B2 (ja) | ランデルロータ型モータ | |
| WO2010150492A1 (ja) | アキシャル型モータ | |
| US20110018384A1 (en) | Motor | |
| JP2008086064A (ja) | ブラシレスモータ | |
| JP2009213284A (ja) | ブラシレスモータ | |
| WO2015151344A1 (ja) | 永久磁石式ブラシレスモータ | |
| JP2010051150A (ja) | ブラシレスモータ | |
| JP2009213283A (ja) | ブラシレスモータ | |
| JP4718580B2 (ja) | 永久磁石型回転電機及び電動パワーステアリング装置 | |
| JP2006174692A (ja) | ブラシレスモータ | |
| JP2014155357A (ja) | ブラシレスモータ | |
| JP2014093914A (ja) | ブラシレスモータ | |
| JP5975786B2 (ja) | マグネット補助型リラクタンスモータ用ロータ及びブラシレスモータ | |
| JP2009065803A (ja) | 磁石同期機 | |
| JP2013192359A (ja) | ブラシレスモータ | |
| JP5199704B2 (ja) | ブラシレスモータ | |
| JP2010172053A (ja) | スロットレスモータ | |
| JP2015186322A (ja) | ブラシレスモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15843528 Country of ref document: EP Kind code of ref document: A1 |
|
| DPE1 | Request for preliminary examination filed after expiration of 19th month from priority date (pct application filed from 20040101) | ||
| WWE | Wipo information: entry into national phase |
Ref document number: 15510462 Country of ref document: US |
|
| REEP | Request for entry into the european phase |
Ref document number: 2015843528 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2015843528 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |