WO2016027432A1 - 車両用通知装置 - Google Patents
車両用通知装置 Download PDFInfo
- Publication number
- WO2016027432A1 WO2016027432A1 PCT/JP2015/003962 JP2015003962W WO2016027432A1 WO 2016027432 A1 WO2016027432 A1 WO 2016027432A1 JP 2015003962 W JP2015003962 W JP 2015003962W WO 2016027432 A1 WO2016027432 A1 WO 2016027432A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle
- notification
- host vehicle
- distance
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/10—Input arrangements, i.e. from user to vehicle, associated with vehicle functions or specially adapted therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q9/00—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling
- B60Q9/008—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling for anti-collision purposes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/23—Head-up displays [HUD]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/25—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using haptic output
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/26—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using acoustic output
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/28—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor characterised by the type of the output information, e.g. video entertainment or vehicle dynamics information; characterised by the purpose of the output information, e.g. for attracting the attention of the driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/80—Arrangements for controlling instruments
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/90—Details or parts not otherwise provided for
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/178—Warnings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/179—Distances to obstacles or vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/20—Optical features of instruments
- B60K2360/31—Virtual images
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/20—Optical features of instruments
- B60K2360/33—Illumination features
- B60K2360/334—Projection means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/213—Virtual instruments
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/60—Instruments characterised by their location or relative disposition in or on vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/90—Details or parts not otherwise provided for
- B60N2002/981—Warning systems, e.g. the seat or seat parts vibrates to warn the passenger when facing a danger
Definitions
- the present disclosure relates to a vehicle notification device that is mounted on a host vehicle having a notification unit that notifies a passenger, and that prompts the notification unit to perform the notification.
- a vehicle notification device that is mounted on a host vehicle having a notification unit that notifies a passenger, and that prompts the notification unit for the notification.
- the safe driving support system including the vehicle notification device disclosed in Patent Document 1, it is determined whether there is another vehicle in the warning range as a criterion for determining whether to perform the warning. Is displayed on the head-up display, and a voice warning using a speaker is given. That is, a warning is given based on the distance between the host vehicle and the other vehicle.
- the present disclosure has been made in view of the above points, and the purpose of the present disclosure is to reduce the inconvenience of notifications made to the passengers of the host vehicle, and to prompt the vehicle to avoid collisions with other vehicles. To provide an apparatus.
- the vehicle notification device is mounted on a host vehicle having a notification unit that notifies an occupant, and outputs a notification signal related to other vehicles to the notification unit.
- the vehicle notification device is configured to determine whether or not the host vehicle is present on a road where lane change is possible, and when the determination unit determines that the host vehicle is present on a road where lane change is possible And a notification determination unit that determines whether or not to output a notification signal to the notification unit based on the distance between the host vehicle and the other vehicle and the relative speed of the other vehicle with respect to the host vehicle.
- the presence / absence of a notification signal regarding the other vehicle is determined by the distance between the host vehicle and the other vehicle, the relative speed of the other vehicle with respect to the host vehicle To be determined.
- the relative speed is taken into account when considering the risk of collision. It is possible to notify appropriately according to. Therefore, it is possible to provide a vehicular notification device that urges the avoidance of a collision with another vehicle while reducing the inconvenience of the notification made to the passenger of the host vehicle.
- FIG. 1 is a block diagram for explaining the vehicle notification device in the host vehicle of the first embodiment.
- FIG. 2 is a schematic diagram for explaining the HUD device and the vibration device in the host vehicle in the first embodiment.
- FIG. 3 is a flowchart of the vehicle notification device according to the first embodiment.
- FIG. 4 is a flowchart showing the forward notification determination process of FIG.
- FIG. 5 is a flowchart showing the backward notification determination process of FIG.
- FIG. 6 is a flowchart showing the backward notification selection process of FIG.
- FIG. 7 is a schematic diagram illustrating an example of a notification state of the HUD device in the first embodiment.
- FIG. 8 is a schematic diagram illustrating another example of the notification state of the HUD device in the first embodiment.
- FIG. 9 is a schematic diagram illustrating an example of a notification state of the HUD device when the first stage notification in the first embodiment is selected.
- FIG. 10 is a schematic diagram illustrating an example of a notification state of the HUD device when the second stage notification in the first embodiment is selected.
- FIG. 11 is a schematic diagram showing the host vehicle, another vehicle, and a road according to the scene of Example 1 in the first embodiment.
- FIG. 12 is a schematic diagram showing the host vehicle, another vehicle, and a road according to the scene of Example 2 in the first embodiment.
- FIG. 13 is a schematic diagram showing the host vehicle, another vehicle, and a road according to the scene of Example 3 in the first embodiment.
- FIG. 14 is a schematic diagram showing the host vehicle, another vehicle, and a road according to the scene of Example 4 in the first embodiment.
- FIG. 15 is a schematic diagram showing the host vehicle, another vehicle, and a road according to the scene of Example 5 in the first embodiment.
- FIG. 16 is a schematic diagram showing the host vehicle, another vehicle, and a road according to the scene of Example 6 in the first embodiment.
- FIG. 17 is a flowchart of the vehicle notification device according to the second embodiment.
- FIG. 18 is a flowchart showing the backward notification determination process of FIG.
- a vehicle notification device 100 according to the first embodiment of the present disclosure shown in FIG. 1 is mounted on a host vehicle 1 that is an automobile.
- the vehicle notification device 100 includes an other vehicle detection sensor 2, a host vehicle speed sensor 3, an operation unit 4, a head-up display device 5 (hereinafter referred to as a HUD device), a vibration device 6 in a driver's seat 8, a speaker 7, and the like. And can be communicated by in-vehicle LAN.
- the vehicle notification device 100 is a command signal for notification regarding other vehicles to the HUD device 5, the vibration device 6, and the speaker 7 based on inputs from the other vehicle detection sensor 2, the host vehicle speed sensor 3, and the operation unit 4. Can be output.
- the notification regarding another vehicle is performed with respect to the passenger
- the passengers perceive these notifications by visual, tactile, and auditory senses, the passengers can recognize notifications regarding other vehicles.
- the own vehicle speed sensor 3 is a sensor that detects the vehicle speed Vo (hereinafter, the own vehicle speed) of the own vehicle 1. Specifically, the host vehicle speed sensor 3 detects the rotation speed of the axle of the host vehicle 1 and outputs a vehicle speed signal corresponding to the rotation speed to the vehicle notification device 100.
- the other vehicle detection sensor 2 is a sensor that detects other vehicles existing around the host vehicle 1.
- the other vehicle detection sensor 2 is mainly composed of a plurality of sensor elements such as a camera 2a and a millimeter wave radar 2b, for example, and a detection signal which is a detection result of the sensor elements 2a and 2b is used for the vehicle.
- the information is output to the notification device 100.
- the operation unit 4 is a part that is operated by the driver, and in particular in the present embodiment, corresponds to a direction indicating switch that turns on the winker 1f that performs a right / left turn signal (see also FIG. 16). When operated by a driver, the operation unit 4 outputs an operation signal to the vehicle notification device 100.
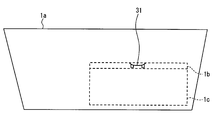
- the HUD device 5 is a vehicle display device that projects an image onto a projection member 1a such as a windshield to display a virtual image so that the image is visible in the visual recognition area 8a.
- the visual recognition area 8a is an area in which the image 30 as a virtual image can be visually recognized.
- the visual recognition area 8a is set in consideration of an eyelip that is a space area where a driver's eyepoint seated in the driver's seat 8 among the passengers can exist.
- the viewing area 8a as described above, the driver of the occupant can visually recognize the image 30 as a virtual image, and the assistant seated in the passenger seat 9 of the occupant cannot visually recognize the image 30 as a virtual image. In this manner, the HUD device 5 can display a virtual image of the image 30 to notify the driver about other vehicles.
- the vibration device 6 of the driver's seat 8 is provided at two places on the left and right inside the backrest of the driver's seat 8, and can individually notify the driver about other vehicles by vibrating individually.
- Speaker 7 is a device that outputs sound, and can notify each passenger about other vehicles.
- the vehicle notification device 100 is an electronic control device configured mainly with a control circuit 10 including a CPU 10 a and a memory 10 b.
- the CPU 10a can execute various processes by executing a computer program stored in the memory 10b.
- the memory 10b stores image data used for the HUD device 5 in addition to the computer program described above. Note that there may be a plurality of CPUs 10a and memories 10b.
- FIGS. 6 flowcharts executed by the execution of the computer program by the control circuit 10 of the vehicle notification device 100 according to the first embodiment in cooperation with the HUD device 5, the vibration device 6, the speaker 7, and the like are shown in FIGS. 6 will be described in detail.
- the process based on the flowchart shown in FIG. 3 is implemented for every set period, for example.
- each command signal when it is determined in step S30 or S50 that there is a notification regarding another vehicle is specifically defined as a notification signal.
- step S10 a vehicle speed signal and a detection signal are acquired. After the process of step S10, the process proceeds to step S20.
- step S20 it is determined whether or not the host vehicle 1 is present on a road where lane change is possible.
- the host vehicle speed Vo is calculated from the vehicle speed signal from the host vehicle speed sensor 3, and when the host vehicle speed Vo is higher than the set host vehicle speed Vos, it is determined that the vehicle exists on a road where the lane can be changed. That is, if the host vehicle 1 is traveling at a high speed, it is estimated that the host vehicle 1 exists on the highway, and if the host vehicle 1 is a highway, there is a high possibility that the host vehicle 1 has a plurality of lanes. It is presumed to exist on a road that can be changed. If it is determined in step S20 that the vehicle is on a road where lane change is possible, the process proceeds to step S30. If a negative determination is made in step S20, a series of processing ends.
- step S30 a forward notification determination process is performed for notifications related to other vehicles ahead. Specifically, the presence / absence of the notification signal is determined based on the distance Lp between the host vehicle 1 and the other vehicle and the relative speed Vrp of the other vehicle with respect to the host vehicle 1 with respect to the other vehicle ahead. After the process of step S30, the process proceeds to step S40.
- step S40 a command signal for notifying the other vehicle ahead is output to the HUD device 5. For example, when it is determined in step S30 that there is a notification signal, a notification signal as a command signal is output. After the process of step S40, the process proceeds to step S50.
- step S50 a rear notification determination process is performed for notification regarding other vehicles behind. Specifically, the presence or absence of a notification signal is determined based on the distance Lf between the host vehicle 1 and the other vehicle and the relative speed Vrf of the other vehicle with respect to the host vehicle 1 with respect to the other vehicle behind. After the process of step S50, the process proceeds to step S60.
- step S60 a rear notification selection process for a notification regarding other vehicles behind is performed. Specifically, based on the operation of the operation unit 4, the distance Lp between the host vehicle 1 and the other vehicle, and the relative speed Vrp of the other vehicle with respect to the host vehicle 1, a notification method and contents regarding the other vehicle behind are described. select. After the process of step S60, the process proceeds to step S70.
- step S70 a notification command signal regarding the other vehicle behind is output to the HUD device 5, the vibration device 6, and the speaker 7. For example, if it is determined in step S50 that there is a notification signal, a notification signal as a command signal is output. A series of processing is complete
- the distances Lp and Lf between the host vehicle 1 and the other vehicle used in steps S30 and S50 are calculated based on the detection signal from the other vehicle detection sensor 2 acquired in step S10.
- the distances Lp and Lf between the host vehicle 1 and the other vehicle can be obtained by analyzing the received wave of the millimeter wave radar 2b constituting the other vehicle detection sensor 2, or analyzing the captured image of the camera 2a, or a combination thereof.
- the relative speeds Vrp and Vrf of the other vehicle used in steps S30 and S50 with respect to the host vehicle 1 are also calculated based on the detection signal from the other vehicle detection sensor 2 acquired in step S10.
- the amount of change in the distances Lp and Lf obtained at each detection time can be set as the relative speeds Vrp and Vrf of the other vehicle with respect to the host vehicle 1.
- the distances Lp and Lf and the relative speeds Vrp and Vrf are corrected using the host vehicle speed. .
- the command signal in step S40 or S70 is a signal corresponding to the determination (and selection) in steps S30 or S50 and S60, respectively.
- the command signal is input to each of the devices 5, 6, and 7, the notification state of each device is updated.
- step S30 the forward notification determination process in step S30 performed by the vehicle notification device 100 will be described in more detail using the flowchart shown as a subroutine in FIG.
- step S31 it is determined whether there is another vehicle ahead in the same lane as the own vehicle 1. If an affirmation judging is made at Step S31, it will move to Step S32. If a negative determination is made in step S31, the process proceeds to step S35.
- step S32 it is determined whether or not the distance Lp is equal to or less than the set distance Lps for other vehicles ahead. If an affirmation judging is made at Step S32, it will move to Step S34. If a negative determination is made in step S32, the process proceeds to step S33.
- step S33 it is determined whether or not the margin time Tp is equal to or less than the set time Tps for other vehicles ahead. If an affirmation judging is made at Step S33, it will move to Step S34. If a negative judging is made at Step S33, it will move to Step S35.
- step S34 it is determined that there is a notification signal for notification regarding other vehicles ahead.
- the forward notification determination process is terminated by step S34.
- step S35 it is determined that there is no notification signal regarding the other vehicle ahead.
- the forward notification determination process is terminated by step S35.
- the HUD device 5 to which a command signal related to the other vehicle ahead is input as a result of step S40 through step S34 or S35 will be briefly described.
- the notification signal is input when it is determined that there is a notification signal
- the HUD device 5 updates the notification state
- the other vehicle in front is the own vehicle 1 as a notification regarding the other vehicle in front.
- a forward notification image 31 indicating that the vehicle is approaching is displayed as a virtual image at the display location 1b.
- the HUD device 5 notifies the driver among the occupants.
- the HUD device 5 updates the notification state and stops the virtual image display of the forward notification image 31 by a command signal when it is determined that there is no notification.
- step S50 the rear notification determination process in step S50 performed by the vehicle notification device 100 will be described in more detail with reference to the flowchart shown in FIG.
- step S51 it is determined whether there is another vehicle behind. If an affirmation judging is made at Step S51, it will move to Step S52. If a negative judging is made at Step S51, it will move to Step S57.
- step S52 it is determined whether there is another vehicle behind in the same lane as the own vehicle 1. If an affirmation judging is made at Step S52, it will move to Step S54. If a negative determination is made in step S52, the process proceeds to step S53.
- step S53 it is determined in the forward notification determination process in step S30 whether or not it is determined that there is a notification signal related to the other vehicle ahead. If an affirmation judging is made at Step S53, it will move to Step S54. If a negative determination is made in step S53, the process proceeds to step S57.
- step S54 it is determined whether or not the distance Lf is less than or equal to the set distance Lfs for other vehicles behind. If an affirmation judging is made at Step S54, it will move to Step S56. If a negative determination is made in step S54, the process proceeds to step S55.
- step S55 it is determined whether or not the margin time Tf is less than or equal to the set time Tfs for other vehicles behind.
- the margin time Tf is calculated in the same manner as Tp. If an affirmation judging is made at Step S55, it will move to Step S56. If a negative judging is made at Step S55, it will move to Step S57.
- step S56 it is determined that there is a notification signal for notification regarding other vehicles behind.
- the backward notification determination process is terminated by step S56.
- step S57 it is determined that there is no notification signal for notification regarding other vehicles behind.
- the backward notification determination process is terminated in step S57.
- step S60 the rear notification selection processing in step S60 performed by the vehicle notification device 100 will be described in more detail using the flowchart shown as a subroutine in FIG.
- step S61 it is determined whether or not it is determined that there is a notification signal related to the other vehicle behind in the rear notification determination process in step S50. If an affirmation judging is made at Step S61, it will move to Step S62. If a negative determination is made in step S61, the process proceeds to step S67.
- step S62 it is determined whether or not the margin time Tf is equal to or less than the set selection time Tfe for the other vehicle behind.
- the setting selection time Tfe is shorter than the setting time Tfs. If an affirmation judging is made at Step S62, it will move to Step S63. If a negative determination is made in step S62, the process proceeds to step S66.
- step S63 it is determined whether or not the operation unit 4 is operated. If an affirmation judging is made at Step S63, it will move to Step S64. If a negative determination is made in step S63, the process proceeds to step S65.
- step S64 the third stage notification is selected.
- the backward notification selection process is terminated through step S64.
- step S65 the second stage notification is selected.
- the backward notification selection process is terminated by step S65.
- step S66 the first stage notification is selected.
- the backward notification selection process is terminated by step S66.
- step S67 no notification is selected.
- the backward notification selection process is terminated in step S67.
- the third stage notification is the most urgent.
- the notification at each stage will be described in detail below.
- step S57 it is determined in step S57 that there is no notification signal related to the other vehicle behind, and each device 5, 6, 7 by the command signal when no notification is selected in step S67 updates the notification state. , Stop notifications.
- step S56 each of the devices 5, 6, and 7 based on the notification signal when it is determined in step S56 that there is a notification signal regarding the other vehicle behind and the first stage notification is selected in step S66 will be described.
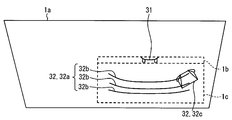
- the HUD device 5 displays a rear notification image 32 indicating that the other vehicle behind is approaching the host vehicle 1. More specifically, the rear notification image 32 has a display location 1c below the host vehicle 1 rather than the display location 1b of the front notification image 31.
- the rear notification image 32 is mainly composed of a reference image 32a and a rear other vehicle image 32c.
- the reference image 32 a in this embodiment three linear line images 32 b extending substantially along the lateral direction of the host vehicle 1 are arranged in parallel in the vertical direction of the host vehicle 1.
- the rear other vehicle image 32c in the present embodiment is an image simulating another vehicle, and the relative display position with respect to the reference image 32a is determined based on the detection signal from the other vehicle detection sensor 2.
- the rear other vehicle image 32c is displayed at the center of the reference image 32a as shown in FIG. Further, the relative display position of the rear other vehicle image 32c in the vertical direction with respect to the reference image 32a is determined based on the margin time Tf for the rear other vehicle. In the example of FIG. 9, the upper end 32d of the rear other vehicle image 32c is displayed so as to overlap between the three line images 32b. In this way, the HUD device 5 notifies the driver among the occupants.
- the vibration device 6 stops the vibration as a notification.
- the speaker 7 also stops outputting sound as a notification.
- step S56 each of the devices 5, 6, and 7 based on the notification signal when it is determined in step S56 that the notification signal for the other vehicle behind is determined to be present and the second stage notification is selected in step S65 will be described.
- the HUD device 5 displays a rear notification image 32 indicating that the other vehicle behind is approaching the host vehicle 1.
- the rear other vehicle image 32c is above the three line images 32b, that is, more forward notification images. 31 is displayed with an upper end 32d arranged on the display portion 1b side.
- the rear other vehicle image 32 c is displayed on the relatively right side of the reference image 32 a as a case where the other vehicle behind is present in the lane on the right side of the host vehicle 1.
- the vibration device 6 stops the vibration as a notification in a stopped state, similarly to the first stage notification.
- the speaker 7 also stops the output of sound as a notification in the same manner as the first stage or notification.
- step S56 each of the devices 5, 6, and 7 based on the notification signal when it is determined in step S56 that the notification signal regarding the other vehicle behind is present and the third-stage notification is selected in step S64 will be described.
- the HUD device 5 displays the rear notification image 32 similar to the second stage notification shown in FIG. 10 in a virtual image, but changes the hue of the rear notification image 32 to indicate an alarm.
- the white color in the first stage notification and the second stage notification is changed to red.
- the vibration device 6 notifies the driver of the occupant by vibrating.
- the speaker 7 also notifies the occupant by outputting sound.
- a passenger other than the driver is also notified.
- Example 1 As shown in FIG. 11, the host vehicle 1 travels in the overtaking lane 40b, and the other vehicle 42a behind travels in the overtaking lane 40b.
- the distance between the host vehicle 1 and the other vehicle 42a is L1> Lfs, and the relative speed of the other vehicle 42a with respect to the host vehicle 1 is Vr1.
- the margin time T1 L1 / Vr1, and Tfe ⁇ T1 ⁇ Tfs.
- step S50 an affirmative determination is made in steps S51 and S52, and a negative determination is made in step S54. Since an affirmative determination is made in step S55, it is determined in step S56 that there is a notification signal related to the other vehicle 42a behind.
- step S60 In the backward notification selection process in step S60, an affirmative determination is made in step S61, but a negative determination is made in step S62, so the first stage notification is selected in step S66.
- the HUD device 5 displays a rear notification image 32 as shown in FIG.
- the distance L1 is larger than the set distance Lfs, but the margin time T1 is smaller than the set time Tfs, so that the risk that the own vehicle 1 collides with the other vehicle 42a is high. A notice was made to encourage avoidance.
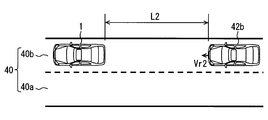
- Example 2 As shown in FIG. 12, the host vehicle 1 travels in the overtaking lane 40b, and the other vehicle 42b behind travels in the overtaking lane 40b.
- the distance between the host vehicle 1 and the other vehicle 42b is L2> Lfs, and the relative speed of the other vehicle 42b with respect to the host vehicle 1 is Vr2.
- the margin time T2 L2 / Vr2.
- L2 L1, Vr2 ⁇ Vr1, and T2> Tfs.
- step S50 an affirmative determination is made in steps S51 and S52, and a negative determination is made in steps S54 and S55. Therefore, in step S57, a notification signal for notification regarding the rear other vehicle 42b is issued. Determined to be none.
- the distance L2 is the same as that of the first embodiment, but since the margin time T2 is larger than the set time Tfs, the risk that the own vehicle 1 collides with the other vehicle 42b is small. No notification was made to reduce annoyance.
- Example 3 As shown in FIG. 13, the host vehicle 1 travels in the overtaking lane 40b, and the other vehicle 42c behind travels in the overtaking lane 40b.
- the distance between the host vehicle 1 and the other vehicle 42c is L3 ⁇ Lfs, and the relative speed of the other vehicle 42c with respect to the host vehicle 1 is Vr3.
- step S50 since an affirmative determination is made in steps S51, S52, and S54, it is determined in step S56 that there is a notification signal regarding the other vehicle 42c in the rear.
- step S60 In the backward notification selection process in step S60, an affirmative determination is made in step S61, but a negative determination is made in step S62, so the first stage notification is selected in step S66.
- the HUD device 5 displays a rear notification image 32 as shown in FIG.
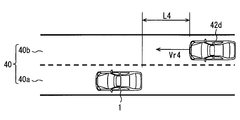
- Example 4 As shown in FIG. 14, the host vehicle 1 travels in the travel lane 40 a, and the other vehicle 42 d behind travels in the overtaking lane 40 b.
- the distance between the host vehicle 1 and the other vehicle 42d is L4> Lfs, and the relative speed of the other vehicle 42d with respect to the host vehicle 1 is Vr4.
- the margin time T4 L4 / Vr4, and T4 ⁇ Tfe.
- step S30 since no other vehicle ahead of the host vehicle 1 exists in the same lane, a negative determination is made in step S31, and a notification signal for notification regarding the other vehicle ahead is issued in step S35. Determined to be none.
- step S50 In the backward notification determination process in step S50, an affirmative determination is made in step S51, but a negative determination is made in step S52. Since a negative determination is made in S53 as a result that no other vehicle ahead of the host vehicle 1 is present in the same lane, it is determined in step S57 that there is no notification signal regarding the other vehicle 42d behind. .
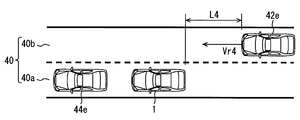
- Example 5 As shown in FIG. 15, the host vehicle 1 travels in the travel lane 40 a, and the other vehicle 42 e behind travels in the overtaking lane 40 b.
- the distance between the host vehicle 1 and the other vehicle 42e is L4, and the relative speed of the other vehicle 42e with respect to the host vehicle 1 is Vr4.
- the margin time T4 L4 / Vr4.
- the other vehicle 44e ahead travels on the same traveling lane 40a as the host vehicle 1, and it is determined in the forward notification determination process in step S30 that there is a notification signal regarding the other vehicle 44e ahead. It was.
- step S50 an affirmative determination is made in step S51, a negative determination is made in step S52, an affirmative determination is made in step S53, and a negative determination is further made in step S54. Is done. Since an affirmative determination is made in step S55, it is determined in step S56 that there is a notification signal related to the other vehicle 42e behind.
- step S60 an affirmative determination is made in step S61 and an affirmative determination is made in step S62, but an affirmative determination is made in step S63. A notification is selected.
- the HUD device 5 displays a virtual image 30 as shown in FIG.
- the host vehicle 1 and the other vehicle 42e are traveling on different lanes 40a and 40b.
- the host vehicle 1 moves to the same lane 40b as the other vehicle 42e.
- the possibility of changing lanes is increasing. For this reason, a notification was made to encourage avoidance.
- Example 6 As shown in FIG. 16, the host vehicle 1 travels in the travel lane 40a, and the other vehicle 42f behind travels in the overtaking lane 40b.
- the distance between the host vehicle 1 and the other vehicle 42f is L4, and the relative speed of the other vehicle 42f with respect to the host vehicle 1 is Vr4.
- the margin time T4 L4 / Vr4.
- the other vehicle 44f ahead travels on the same traveling lane 40a as the host vehicle 1, and it is determined in the forward notification determination process in step S30 that there is a notification signal regarding the other vehicle 44f ahead. It was done.
- the right turn signal 1f is lit.
- step S50 it is determined that there is a notification signal for notification regarding the other vehicle 42f in the rear.
- step S60 since an affirmative determination is made in steps S61 to S63, the third stage notification is selected in step S64.
- the HUD device 5 displays a virtual image of the red image 30 as shown in FIG. 10, and the vibration device 6 vibrates to notify the driver of the occupant.
- the speaker 7 also notifies the occupant by outputting sound.
- the HUD device 5, the vibration device 6, and the speaker 7 constitute a notification unit
- the control circuit 10 that executes Step S20 constitutes a determination unit
- the forward notification determination process in Step S30, and S50 constitutes a notification determination unit
- the control circuit 10 that executes the backward notification selection process in step S60 constitutes a notification selection unit.
- the presence / absence of a notification signal regarding the other vehicle is determined based on the distances Lp and Lf between the host vehicle and the other vehicle, It is determined based on relative speeds Vrp and Vrf with respect to the host vehicle 1. According to this, in the determination of the presence / absence of the notification, whether or not the collision can be avoided by changing the lane is taken into account, and even when the distances Lp and Lf are the same, the relative speeds Vrp and Vrf are determined in consideration of the collision risk. Because it is taken into account, notification can be made appropriately according to the situation. Therefore, it is possible to provide the vehicle notification device 100 that promotes avoiding a collision with another vehicle while reducing the troublesomeness of the notification to be made to the occupant of the host vehicle 1.
- the notification regarding the other vehicle is calculated based on the distances Lp and Lf and the relative speeds Vrp and Vrf. If the margin times Tp and Tf are less than or equal to the set times Tps and Tfs, it is determined that there is. According to this, since the notification is urged based on the surplus times Tp and Tf for the driver to avoid the collision, the troublesomeness of the notification is reduced and the notification can be made appropriately.
- the rear vehicle that is, the other vehicle behind
- the risk of the own vehicle 1 coming into contact with the rear vehicle increases.
- the risk is not so high unless the vehicle 1 changes lanes.
- a forward vehicle that is, another vehicle ahead
- the possibility that the own vehicle 1 changes lanes is lower than when there is no forward vehicle.
- the first embodiment when there is no forward vehicle in the same lane as the own vehicle 1, it is considered that the possibility that the own vehicle 1 will change the lane is low, and the rear vehicle is different from the own vehicle 1 Even if it exists, the above notification is not made regardless of the distance and relative speed with the rear vehicle. For this reason, it is possible to avoid notifying even when the risk is not high, so that the troublesomeness of the notification can be reduced.
- the notification method and contents are selected based on the operation of the operation unit 4 that the host vehicle 1 has and is operated by a passenger, the distance Lf, and the relative speed Vrf. According to this, the notification method and content take into account the risk of collision with other vehicles.
- the notification method and content corresponding to this change can be made, so that notification can be appropriately made according to the situation.
- the second embodiment of the present disclosure is a modification of the first embodiment.
- the second embodiment will be described with a focus on differences from the first embodiment.
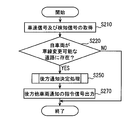
- Step S220 Since the processing of steps S210 and S220 is the same as S10 and S20 of the first embodiment, description thereof is omitted. If an affirmation judging is made at Step S220, it will move to Step S250.
- step S250 a rear notification determination process is performed for notification regarding other vehicles behind. More specifically, the presence / absence of a notification signal related to the other vehicle is determined based on the distance Lf between the own vehicle 1 and the other vehicle and the relative speed Vrf of the other vehicle to the own vehicle 1 with respect to the other vehicle behind. decide. After step S250, the process proceeds to step S270.
- step S270 as in S70 of the first embodiment, a notification command signal related to the other vehicle behind is output to the HUD device 5, the vibration device 6, and the speaker 7. For example, if it is determined in step S250 that there is a notification signal, a notification signal as a command signal is output. A series of processing is complete
- step S250 the backward notification determination process in step S250 will be described in more detail using a flowchart shown as a subroutine in FIG.
- step S251 it is determined whether there is another vehicle behind. If an affirmation judging is made at Step S251, it will move to Step S252. If a negative determination is made in step S251, the process proceeds to step S255.
- step S252 it is determined whether or not the distance Lf is less than or equal to the set distance Lfs for other vehicles behind. If an affirmation judging is made at Step S252, it will move to Step S254. If a negative determination is made in step S252, the process proceeds to step S253.
- step S253 it is determined whether or not the relative speed Vrf is equal to or higher than the set speed Vrfs for other vehicles behind. If an affirmation judging is made at Step S253, it will move to Step S254. If a negative determination is made in step S253, the process proceeds to step S255.
- step S254 it is determined that there is a notification signal for notification regarding other vehicles behind.
- the backward notification determination process is terminated by step S254.
- step S255 it is determined that there is no notification signal for notification regarding other vehicles behind.
- the backward notification determination process is terminated by step S255.
- the distance Lf between the host vehicle 1 and the other vehicle, and the host vehicle 1 of the other vehicle is determined based on the relative speed Vrf with respect to. Therefore, it is possible to achieve the operational effects according to the first embodiment.
- the relative speed Vrf is equal to or higher than the set speed Vrfs, it is determined that there is a notification regarding another vehicle. If the relative speed Vrf is large, even if the distance Lf is large, the other vehicle will eventually approach and the risk of collision will increase, so in this case it is determined that there is a notification.
- the HUD device 5, the vibration device 6, and the speaker 7 constitute a notification unit
- the control circuit 10 that executes Step S220 constitutes a determination unit, and executes the backward notification determination process in Step S250.
- the vehicle notification device 100 outputs a notification signal to devices other than the HUD device 5, the vibration device 6, and the speaker 7.
- a combination meter, a car navigation system, or an electronic mirror that receives a notification signal may display a real image as a notification to the occupant.
- an LED to which a notification signal is input may be turned on as a notification to the occupant.
- the steering wheel to which the notification signal is input may vibrate as a notification to the driver among the occupants.
- distances Lp and Lf between the host vehicle 1 and other vehicles and relative speeds Vrp and Vrf of the other vehicle with respect to the host vehicle 1 are vehicle-to-vehicle communication, road-to-vehicle communication, etc. You may make it acquire by this communication.
- whether or not the host vehicle 1 is present on a lane-changeable road may be determined using GPS or the like.
- the distances Lp and Lf between the host vehicle 1 and other vehicles when it is determined that the host vehicle 1 is present on a road where lane change is possible, the distances Lp and Lf between the host vehicle 1 and other vehicles, Various means can be employed if the presence or absence of the notification signal is determined based on the relative speeds Vp and Vf of the other vehicle with respect to the host vehicle 1.
- the set distances Lps and Lfs and the set times Tps and Tfs may be varied according to the positional relationship with other vehicles, the road alignment, and the like.
- the presence or absence of a notification signal may be determined based on a return value of a function (for example, a special parameter) based on the distances Lp and Lf and the relative speeds Vrp and Vrf.
- a function for example, a special parameter
- the presence / absence of a notification signal may be determined based on the distances Lp and Lf, the relative speeds Vrp and Vrf, and the acceleration.
- each part is expressed as, for example, S100. Furthermore, each part can be divided into a plurality of sub-parts, while the plurality of parts can be combined into one part. Furthermore, each part configured in this manner can be referred to as a circuit, a device, a module, and a means.
- Each of the above-mentioned plurality of parts or a combination thereof is not only (i) a software part combined with a hardware unit (for example, a computer), but also (ii) hardware (for example, an integrated circuit, As a part of the (wiring logic circuit), it can be realized with or without including the functions of related devices.
- the hardware unit can be configured inside a microcomputer.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Aviation & Aerospace Engineering (AREA)
- Traffic Control Systems (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/503,868 US10363871B2 (en) | 2014-08-21 | 2015-08-06 | Vehicle notification apparatus |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014-168796 | 2014-08-21 | ||
| JP2014168796A JP6442921B2 (ja) | 2014-08-21 | 2014-08-21 | 車両用通知装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016027432A1 true WO2016027432A1 (ja) | 2016-02-25 |
Family
ID=55350401
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/003962 Ceased WO2016027432A1 (ja) | 2014-08-21 | 2015-08-06 | 車両用通知装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10363871B2 (https=) |
| JP (1) | JP6442921B2 (https=) |
| WO (1) | WO2016027432A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2561966A (en) * | 2017-03-06 | 2018-10-31 | Ford Global Tech Llc | Assisting drivers with roadway lane changes |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6774220B2 (ja) * | 2016-05-23 | 2020-10-21 | 株式会社Subaru | 車両の後側方検知装置 |
| JP7551228B2 (ja) * | 2020-12-14 | 2024-09-17 | パナソニックオートモーティブシステムズ株式会社 | 安全確認支援システム及び安全確認支援方法 |
| KR102685106B1 (ko) * | 2023-11-22 | 2024-07-12 | 정희수 | 후방충돌경고장치 및 그 장치의 구동방법 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000172994A (ja) * | 1998-12-03 | 2000-06-23 | Mazda Motor Corp | 車両の障害物警報装置 |
| JP2000185610A (ja) * | 1998-12-24 | 2000-07-04 | Mazda Motor Corp | 車両の障害物警報装置 |
| JP2007153307A (ja) * | 2005-11-09 | 2007-06-21 | Nissan Motor Co Ltd | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| WO2010122747A1 (ja) * | 2009-04-23 | 2010-10-28 | パナソニック株式会社 | 運転支援装置、運転支援方法及びプログラム |
| JP2011134103A (ja) * | 2009-12-24 | 2011-07-07 | Aisin Aw Co Ltd | 案内装置、案内方法、及び案内プログラム |
| JP2015011458A (ja) * | 2013-06-27 | 2015-01-19 | 株式会社デンソー | 車両用情報提供装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009184554A (ja) | 2008-02-07 | 2009-08-20 | Denso Corp | 安全走行支援システム |
| US20110190972A1 (en) * | 2010-02-02 | 2011-08-04 | Gm Global Technology Operations, Inc. | Grid unlock |
| US8599027B2 (en) * | 2010-10-19 | 2013-12-03 | Deere & Company | Apparatus and method for alerting machine operator responsive to the gaze zone |
| WO2013122030A1 (ja) * | 2012-02-14 | 2013-08-22 | 日産自動車株式会社 | 走行制御装置及び走行制御方法 |
-
2014
- 2014-08-21 JP JP2014168796A patent/JP6442921B2/ja not_active Expired - Fee Related
-
2015
- 2015-08-06 US US15/503,868 patent/US10363871B2/en active Active
- 2015-08-06 WO PCT/JP2015/003962 patent/WO2016027432A1/ja not_active Ceased
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000172994A (ja) * | 1998-12-03 | 2000-06-23 | Mazda Motor Corp | 車両の障害物警報装置 |
| JP2000185610A (ja) * | 1998-12-24 | 2000-07-04 | Mazda Motor Corp | 車両の障害物警報装置 |
| JP2007153307A (ja) * | 2005-11-09 | 2007-06-21 | Nissan Motor Co Ltd | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| WO2010122747A1 (ja) * | 2009-04-23 | 2010-10-28 | パナソニック株式会社 | 運転支援装置、運転支援方法及びプログラム |
| JP2011134103A (ja) * | 2009-12-24 | 2011-07-07 | Aisin Aw Co Ltd | 案内装置、案内方法、及び案内プログラム |
| JP2015011458A (ja) * | 2013-06-27 | 2015-01-19 | 株式会社デンソー | 車両用情報提供装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2561966A (en) * | 2017-03-06 | 2018-10-31 | Ford Global Tech Llc | Assisting drivers with roadway lane changes |
| US10328973B2 (en) | 2017-03-06 | 2019-06-25 | Ford Global Technologies, Llc | Assisting drivers with roadway lane changes |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170232892A1 (en) | 2017-08-17 |
| JP6442921B2 (ja) | 2018-12-26 |
| US10363871B2 (en) | 2019-07-30 |
| JP2016045659A (ja) | 2016-04-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10748425B2 (en) | Image generation apparatus | |
| US10336190B2 (en) | Road sign information display system and method in vehicle | |
| JP5160564B2 (ja) | 車両情報表示装置 | |
| US12469307B2 (en) | Display control device | |
| JP6500820B2 (ja) | 車載装置 | |
| WO2016157883A1 (ja) | 走行制御装置及び走行制御方法 | |
| WO2016067544A1 (ja) | 車載注意喚起システム及び報知制御装置 | |
| CN109562757B (zh) | 驾驶辅助装置、驾驶辅助方法、移动体和程序 | |
| WO2021200121A1 (ja) | 提示制御装置および提示制御プログラム | |
| US12030514B2 (en) | Presentation control device and non-transitory computer readable storage medium | |
| JP6442921B2 (ja) | 車両用通知装置 | |
| JP2018151903A (ja) | 虚像表示装置及びコンピュータプログラム | |
| WO2015004784A1 (ja) | 車両用情報表示装置及び車両用情報表示方法 | |
| JP7081669B2 (ja) | 情報処理装置、情報処理方法および情報処理プログラム | |
| JP6471707B2 (ja) | 運転教示装置 | |
| JP7647810B2 (ja) | 提示制御装置及び提示制御プログラム | |
| JP2021037916A (ja) | 表示制御装置及び表示制御プログラム | |
| JP2020095044A (ja) | 表示制御装置及び表示制御方法 | |
| JP2010100093A (ja) | 音声出力統合装置および音声出力統合方法 | |
| JP2005329811A (ja) | 車両用警報装置 | |
| JP7334768B2 (ja) | 提示制御装置及び提示制御プログラム | |
| JP2018167834A (ja) | 画像生成装置 | |
| JP4129421B2 (ja) | 自車位置近傍の他車位置表示装置 | |
| WO2025203238A1 (ja) | 車両制御装置 | |
| WO2025263244A1 (ja) | 自動運転制御装置、及び自動運転制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15833964 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 15833964 Country of ref document: EP Kind code of ref document: A1 |