WO2015186310A1 - 運転支援装置 - Google Patents
運転支援装置 Download PDFInfo
- Publication number
- WO2015186310A1 WO2015186310A1 PCT/JP2015/002633 JP2015002633W WO2015186310A1 WO 2015186310 A1 WO2015186310 A1 WO 2015186310A1 JP 2015002633 W JP2015002633 W JP 2015002633W WO 2015186310 A1 WO2015186310 A1 WO 2015186310A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- pattern
- display
- range
- unit
- overcoming
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3453—Special cost functions, i.e. other than distance or default speed limit of road segments
- G01C21/3484—Personalized, e.g. from learned user behaviour or user-defined profiles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/10—Input arrangements, i.e. from user to vehicle, associated with vehicle functions or specially adapted therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/22—Display screens
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/28—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor characterised by the type of the output information, e.g. video entertainment or vehicle dynamics information; characterised by the purpose of the output information, e.g. for attracting the attention of the driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/80—Arrangements for controlling instruments
- B60K35/81—Arrangements for controlling instruments for controlling displays
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3453—Special cost functions, i.e. other than distance or default speed limit of road segments
- G01C21/3461—Preferred or disfavoured areas, e.g. dangerous zones, toll or emission zones, intersections, manoeuvre types or segments such as motorways, toll roads or ferries
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/3641—Personalized guidance, e.g. limited guidance on previously travelled routes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3667—Display of a road map
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3697—Output of additional, non-guidance related information, e.g. low fuel level
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096805—Systems involving transmission of navigation instructions to the vehicle where the transmitted instructions are used to compute a route
- G08G1/096827—Systems involving transmission of navigation instructions to the vehicle where the transmitted instructions are used to compute a route where the route is computed onboard
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096833—Systems involving transmission of navigation instructions to the vehicle where different aspects are considered when computing the route
- G08G1/096838—Systems involving transmission of navigation instructions to the vehicle where different aspects are considered when computing the route where the user preferences are taken into account or the user selects one route out of a plurality
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096833—Systems involving transmission of navigation instructions to the vehicle where different aspects are considered when computing the route
- G08G1/096844—Systems involving transmission of navigation instructions to the vehicle where different aspects are considered when computing the route where the complete route is dynamically recomputed based on new data
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/10—Map spot or coordinate position indicators; Map reading aids
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/10—Map spot or coordinate position indicators; Map reading aids
- G09B29/106—Map spot or coordinate position indicators; Map reading aids using electronic means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/166—Navigation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/168—Target or limit values
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/26—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using acoustic output
Definitions
- This disclosure relates to a driving support device that supports driving of a driver by providing information to the driver.
- Patent Document 1 a difficult point that is assumed to be difficult to drive is registered in advance, and a route that does not pass through the registered difficult point in the route calculation from the current position to the destination is disclosed.
- a technique for calculating and guiding is disclosed.
- Patent Document 1 is guided by guiding a route that avoids a difficult place, although a driver who has little experience with the difficult place can reduce the psychological load that passes through the difficult place.
- the present disclosure provides a driving support device that makes it possible to reduce the psychological load that a driver passes through an inexperienced point while facilitating the pleasure of traveling by freely selecting a road network.
- the purpose is to do.
- a driving support device used in a vehicle patterns a display processing unit that causes a display device to display a map and road network components included in the map according to a predetermined type.
- an immature pattern identifying unit that identifies an immature pattern that the driver of the vehicle has insufficient experience, and an action that the vehicle can reach without passing through the immature pattern identified by the immature pattern identifying unit from a set starting point
- An actionable range specifying unit for specifying a possible range.
- the display processing unit causes the display device to perform a display in which the actionable range specified by the actionable range specifying unit is superimposed on the map.
- the driver can superimpose the actionable range that the vehicle can reach without passing through the inexperienced road network components on the map. It is possible to know the possible range of action in which the user can travel without passing through points with insufficient experience even if he / she freely chooses and travels. Therefore, the driver can freely select the road network and travel while having a sense of security that it is not necessary to pass points with insufficient experience within the actionable range. As a result, it is possible to reduce the psychological load that the driver passes through points that are inexperienced, while making it easy to obtain the pleasure of traveling by freely selecting the road network.
- FIG. 1 is a block diagram illustrating an example of a schematic configuration of the driving support system 100.
- FIG. 2 is a block diagram illustrating an example of a schematic configuration of the control device 7 according to the first embodiment.
- FIG. 3 is a flowchart showing an example of the flow of the map network patterning process in the pattern determining unit 71 of the control device 7,
- FIG. 4 is a flowchart illustrating an example of the flow of the experience number learning process in the learning unit 72 of the control device 7.
- FIG. 5 is a flowchart showing an example of the flow of possible action range display processing in the control device 7.
- FIG. 1 is a block diagram illustrating an example of a schematic configuration of the driving support system 100.
- FIG. 2 is a block diagram illustrating an example of a schematic configuration of the control device 7 according to the first embodiment.
- FIG. 3 is a flowchart showing an example of the flow of the map network patterning process in the pattern determining unit 71 of the control device 7
- FIG. 4 is a
- FIG. 6 is a diagram illustrating an example of a display of a possible action range.
- FIG. 7 is a flowchart showing an example of the flow of overcoming notification processing in the control device 7
- FIG. 8 is a block diagram for explaining a schematic configuration of the control device 7 in Modification 4.
- FIG. 9 is a flowchart showing an example of the flow of the ranking display process in the control device 7
- FIG. 10 is a diagram illustrating an example of a display result of ranking according to the size of the actionable range that expands when the bottleneck pattern is overcome
- FIG. 11 is a diagram illustrating an example of a display of the possible range of action after overcoming
- FIG. 12 is a diagram for explaining an example of an aspect in which the actionable range after overcoming and the actionable range before overcoming the bottleneck pattern are displayed in a comparable manner;
- FIG. 13 is a block diagram for explaining a schematic configuration of the control device 7 in Modification 7.
- FIG. 14 is a flowchart showing an example of the flow of overcoming goal display processing in the control device 7.
- FIG. 15 is a block diagram for explaining a schematic configuration of the control device 7 in Modification 8.
- FIG. 16 is a flowchart illustrating an example of the flow of overcoming arrival facility display processing in the control device 7.
- FIG. 1 is a diagram illustrating an example of a schematic configuration of a driving support system 100 to which the present disclosure is applied.
- the driving support system 100 is used in a vehicle.
- the position detector 1, the map DB 2, the display device 3, the voice output device 4, the operation switch group 5, the communication unit 6, and the control device 7 are used. Is included.
- a vehicle using the driving support system 100 is referred to as a host vehicle.
- the position detector 1 sequentially detects the position of the vehicle using, for example, a positioning system that detects the current position of the vehicle (hereinafter, the vehicle position) based on radio waves from the positioning satellite.
- the vehicle position is represented by latitude / longitude coordinates, for example.
- the map DB 2 stores road map data, POI (Points Of Interest) data of various facilities, and the like.
- the road map data includes road data including node data and link data.
- the POI data is data indicating the name, address, position, and attribute of the facility corresponding to the POI.
- the link data includes a unique number (link ID) identifying the link, a link length indicating the link length, link shape information, a segment length indicating the segment length, and link start and end node coordinates (latitude / longitude). , Road name, road type, road width, number of lanes, presence / absence of right / left turn dedicated lane, number of dedicated lanes, one-way traffic regulation, speed regulation value, etc.
- the node data is data such as a node ID given a unique number for each node on the map, node coordinates, node name, a connection link ID describing a link ID of a link connected to the node, and an intersection type. Consists of
- Facility location data is, for example, coordinates expressed in latitude / longitude.
- the facility attribute data is data representing the type and nature of the facility. Examples of facility types include stores such as restaurants and entertainment facilities such as theme parks. Further, as an example of the property of the facility, there is a ranking in which the number of users, evaluation, and the like are ranked.
- the data of the map DB 2 may be acquired by the control device 7 being downloaded from the center through the communication unit 6 to be described later, or may be stored in advance.
- the display device 3 displays text and images in accordance with instructions from the control device 7.
- the display device 3 is capable of full-color display and can be configured using a liquid crystal display or the like.
- the display device 3 may be configured to use a display provided on an instrument panel or the like, or may be configured to use HUD (Head-Up Dispray).
- the audio output device 4 is composed of a speaker or the like, and outputs audio according to instructions from the control device 7.
- the operation switch group 5 for example, a touch switch or a mechanical switch integrated with the display device 3 is used, and an operation instruction for various functions is given to the control device 7 by a switch operation.
- the communication unit 6 communicates with the center via, for example, a roadside device, a base station, or a network.
- a vehicle-mounted communication module used for telematics communication such as DCM (data communication module), or a small vehicle-mounted communication device that receives traffic information transmitted from a radio beacon or an optical beacon installed on the road Etc. can be used.
- the control device 7 is mainly configured as a microcomputer, and each includes a known CPU, a memory such as a ROM and a RAM, an I / O, and a bus connecting them.
- the control device 7 executes various processes based on various information input from the position detector 1, the map DB 2, the operation switch group 5, and the communication unit 6.
- the control device 7 corresponds to the driving support device in the claims.
- control device 7 may be configured in hardware by one or a plurality of ICs.
- the control device 7 includes a pattern determination unit 71, a learning unit 72, a count storage unit 73, a route search unit 74, an immature pattern specification unit 75, a range specification unit 76, a display processing unit 77, and a bottleneck specification.
- Unit 78, bottleneck storage unit 79, and overcoming determination unit 80 Processing in each part of the control device 7 will be described in detail later.
- the map network patterning process is a process related to pattern determination for determining which pattern of a plurality of types of classified patterns corresponds to all links and all nodes included in the map DB 2.
- the flowchart of FIG. 3 is started when the driving support system 100 is used for the first time or when the road map data in the map DB 2 is updated.
- patterning is performed based on information that the driver must consider when a vehicle passes through a node (that is, an intersection) or a link (that is, a road). For example, for node patterns, intersection shapes such as “T-junction”, “crossroads”, “more than five forks”, “merge”, signal rules such as “no right turn signal”, “no pedestrian separation signal”, etc. There are patterns categorized by. Link patterns are classified according to road conditions such as “High speed regulation value”, “Narrow road width”, “More than 4 lanes”, “High traffic volume”, “Large traffic”, etc. There is a pattern made.
- the traffic information received by the communication unit 6 may be used.
- a map network that is, a road network
- pattern determination is performed for all nodes and all links.
- step S1 when the pattern determination for all nodes in the map DB 2 is not completed (NO in S1), the process proceeds to step S2. On the other hand, when the pattern determination for all nodes is completed (YES in S1), the process proceeds to step S3. Since the pattern determination is not performed immediately after the flowchart of FIG. 3 is started, the process proceeds to S2.
- step S2 pattern determination is performed for a node whose pattern determination is not completed among nodes whose data is stored in the map DB2. And as a result of performing pattern determination, when corresponding to the classified node pattern, the node pattern is associated with the node and stored in, for example, the map DB 2.
- the pattern determination unit 71 associates the node pattern “join” with the node and stores it in the map DB 2.
- the plurality of types of node patterns may be stored in association with the nodes.
- step S3 when the pattern determination for all the links in the map DB 2 by the pattern determination unit 71 is not completed (NO in S3), the process proceeds to step S4. On the other hand, when the pattern determination for all links is completed (YES in S3), the map network patterning process is terminated.
- step S4 pattern determination is performed for links for which pattern determination has not ended among links whose data is stored in the map DB2. And when it corresponds to the classified link pattern as a result of pattern determination, the link pattern is matched with the link and memorize
- the pattern determination unit 71 associates the link pattern “the road width is narrow” with the link and stores it in the map DB 2.
- the plurality of types of link patterns may be stored in association with the link.
- the control device 7 determines which pattern of a plurality of types of classified patterns corresponds to all links and all nodes included in the map DB 2, and associates the determined pattern with the link or node.
- stored in map DB2 was shown, it does not necessarily restrict to this.
- data in which corresponding patterns are previously associated with links and nodes may be stored in the map DB 2 in advance, and this data may be stored in the communication unit 6 by the control device 7. It is good also as a structure etc. which are downloaded and memorize
- the experience count learning process is a process of counting the experience count indicating how much the driver has experienced each node pattern and each link pattern.
- the number of experiences counted for each node pattern and each link pattern is stored in the count storage unit 73 for each node pattern and each link pattern. For example, the node pattern “join” is stored in association with the number of experiences “1”, the node pattern “cross road” is associated with the number of experiences “8”, and the like.
- step S21 if it is the initialization timing (YES in S21), the process proceeds to step S22. On the other hand, if it is not the initialization timing (NO in S21), the process proceeds to step S24.
- the initialization timing include when the driving support system 100 is used for the first time or when the driver makes an initialization request via the operation switch group 5.
- step S22 the number of experiences of all node patterns in the count storage unit 73 is initialized. That is, the experience count for all node patterns is set to zero.
- step S23 the number of experiences of all link patterns in the count storage unit 73 is initialized. That is, the experience count for all link patterns is zero.
- step S24 for example, it is determined whether or not the own vehicle is moving depending on whether or not the own vehicle position sequentially detected by the position detector 1 is varied. And when it determines with the own vehicle moving (it is YES at S24), it moves to S25. On the other hand, when it determines with the own vehicle not moving (it is NO at S24), it returns to S21 and repeats a process.
- step S25 it is determined from the node data stored in the map DB 2 and the vehicle position sequentially detected by the position detector 1 whether or not the vehicle has passed the node. As an example, it is determined that the own vehicle has passed the node when the position of the own vehicle that is sequentially detected exceeds the node. And when it determines with the own vehicle having passed the node (it is YES at S25), it moves to S26. On the other hand, if it is not determined that the vehicle has passed the node (NO in S25), the process proceeds to step S27.
- step S26 1 is added to the number of experiences stored in the count storage unit 73 for the node pattern associated in the map DB 2 with the node determined to have passed in S25. For example, if the node pattern “cross road” is associated with the passing node, the experience count for the node pattern “cross road” stored in the count storage unit 73 is incremented by 1, and the process proceeds to step S27. In addition, what is necessary is just to set it as the structure which transfers to step S27, without adding the frequency
- step S27 it is determined whether or not the vehicle has passed the link from the link data stored in the map DB 2 and the vehicle position sequentially detected by the position detector 1. As an example, when the vehicle position that is sequentially detected exceeds the end node coordinates of the link, it is determined that the vehicle has passed the link. And when it determines with the own vehicle having passed the link (it is YES at S27), it moves to step S28. On the other hand, when it is not determined that the vehicle has passed the link (NO in S27), the process returns to S21 and the process is repeated.
- step S28 1 is added to the number of experiences stored in the count storage unit 73 for the link pattern associated in the map DB2 with the link determined to have passed in S27, and the process is repeated by returning to S21. For example, if the link pattern “narrow road width” is associated with the passing link, the number of experiences for the link pattern “narrow road width” stored in the count storage unit 73 is incremented by one.
- the link pattern matched in map DB2 does not exist in the link determined to have passed in S27, it should just be set as the structure which returns to S21 and repeats a process, without adding the frequency
- the actionable range display process is a process of displaying an actionable range in consideration of the driver's link pattern and node pattern traffic experience.
- the flowchart of FIG. 5 may be configured to start when the driver requests display of the actionable range via the operation switch group 5.
- step S41 the route search unit 74 acquires the starting point position.
- the own vehicle position detected by the position detector 1 may be acquired as the starting position, or the driver's home position may be acquired as the starting position if the driver's home position can be acquired.
- the immature pattern specifying unit 75 specifies a node pattern and a link pattern whose number of experiences is less than a predetermined number based on the storage of the count storage unit 73.
- the predetermined number is a value that can be arbitrarily set, and may be set to one time, for example, or may be set to a plurality of times more than once by adjusting the driving experience years, driving experience distance, and the like. Alternatively, the driver may set the number of times via the operation switch group 5.
- step S43 the route search unit 74 prohibits passage of nodes and links corresponding to node patterns (hereinafter referred to as immature node patterns) and link patterns (hereinafter referred to as immature link patterns) identified as less than the predetermined number of times in S42.
- the route search is performed in all directions from the starting position acquired in S41.
- the immature node pattern and the immature link pattern correspond to the immature pattern in the claims.
- a route to a search end point that can be reached according to traffic restrictions such as one-way traffic without passing through the same link more than once is searched.
- the search end point includes a node corresponding to the immature node pattern, a link start node corresponding to the immature link pattern, a link end node corresponding to the dead end, and the like.
- the search is sequentially performed for branches in the middle of the route in all directions that can proceed from the starting position.
- step S44 when the route search is completed in all directions (YES in S44), the process proceeds to step S45. On the other hand, if the route search has not ended (NO in S44), the process returns to S43, and the process is repeated for the route for which the route search has not ended.
- the range specifying unit 76 specifies a range surrounded by connecting search end points of a plurality of routes obtained as a result of the route search in all directions by the route search unit 74 as an actionable range.
- the range specifying unit 76 corresponds to the actionable range specifying unit in the claims.
- the bottleneck specifying unit 78 is an bottleneck that narrows the actionable range of the immature node pattern and the immature link pattern corresponding to the search end point used for specifying the actionable range in the range specifying unit 76. Specify as a pattern. That is, the immature node pattern or the immature link pattern that causes the limitation to the actionable range specified by the range specifying unit 76 is specified as the bottleneck pattern. Then, the bottleneck specifying unit 78 stores the specified bottleneck pattern in the bottleneck storage unit 79. As an example, a list of immature node patterns and immature link patterns specified as bottleneck patterns may be stored in the bottleneck storage unit 79. The bottleneck pattern corresponds to the failure pattern in the claims.
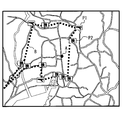
- step S46 the display processing unit 77 displays a display in which the actionable range specified in S45 is superimposed on the map based on the data stored in the map DB 2 and the actionable range specified in S45.
- the following description will be given by taking as an example a case where the starting position acquired in S41 and the bottleneck pattern specified by the bottleneck specifying unit 78 are displayed superimposed on the map.
- FIG. 6 the case where the bottleneck pattern is the node pattern “merge” and the link pattern “the road width is narrow” will be described as an example.
- A is the starting position
- the range surrounded by the dotted line B is the actionable range
- P1 is an icon representing the bottleneck pattern “join”
- P2 is an icon representing the bottleneck pattern “narrow road width” Yes.
- the actionable range and the starting position are displayed superimposed on the map.
- an icon representing the type of the bottleneck pattern is displayed at the position of the bottleneck pattern corresponding to the boundary point of the actionable range.
- the overcoming notification process is a process for determining whether the driver has overcome the immature node pattern or the immature link pattern, and performing notification indicating that the driver has overcome when it is determined that the driver has overcome.
- the flowchart of FIG. 7 may be configured to start when the power of the control device 7 is turned on, such as when the ignition power of the host vehicle is turned on.
- step S61 similarly to S24, the overcoming determination unit 80 determines whether or not the host vehicle is moving. And when it determines with the own vehicle moving (it is YES at S61), it moves to step S62. On the other hand, when it determines with the own vehicle not moving (it is NO at S61), it moves to step S65.
- step S62 from the number of experiences for each node pattern and link pattern stored in the count storage unit 73, the node data stored in the map DB 2, and the vehicle position sequentially detected by the position detector 1, The overcoming determination unit 80 determines whether or not the vehicle has passed a node corresponding to the immature node pattern or a link corresponding to the immature link pattern (hereinafter, immature pattern).
- the number of node patterns or node links associated with the node or link is less than the predetermined number of times described above. In this case, it is determined that the vehicle has passed the immature pattern. And when it determines with the own vehicle having passed the immature pattern (it is YES at S62), it moves to S63. On the other hand, when it is not determined that the vehicle has passed the immature pattern (NO in S62), the process proceeds to step S65.
- step S63 the overcoming determination unit 80 determines whether or not the number of experiences of the node pattern and the link pattern corresponding to the immature pattern has reached the predetermined number of times because the vehicle has passed the immature pattern. If it is determined that the predetermined number of times has been reached (YES in S63), the process proceeds to step S64. On the other hand, when it is determined that the predetermined number of times has not been reached (NO in S63), the process proceeds to step S65.
- step S64 the overcoming determination unit 80 instructs the audio output device 4 to perform audio output indicating that the immature pattern has been overcome, or the display processing unit 77 displays on the display device that the immature pattern has been overcome. Or informing the driver that the immature pattern has been overcome.
- step S65 when it is the end timing of the overcoming notification process (YES in S65), the overcoming notification process is ended. If it is not the end timing of the overcoming notification process (NO in S65), the process returns to S61 and is repeated.
- the end timing of the overcoming notification process there is a time when the power source of the control device 7 is turned off because the ignition power source of the host vehicle is turned off.
- the driver can superimpose on the map the actionable range in which the driver can travel without passing the immature pattern with less than a predetermined number of experiences. It is possible to know an actionable range in which the user can travel without passing through points with insufficient experience even if he / she freely selects and travels.
- the driver can freely select the road network and travel while having a sense of security that it is not necessary to pass points with insufficient experience within this possible range of action.
- it is possible to reduce the psychological load that the driver passes through points that are inexperienced, while making it easy to obtain the pleasure of traveling by freely selecting the road network.
- the display of the icon indicating the type of the bottleneck pattern that is an obstacle to narrow the actionable range that is, the bottleneck pattern that is an immature pattern that causes the actionable range to be narrowed
- the driver can know which bottleneck pattern to overcome to expand the actionable range.
- the driver by making the driver recognize which bottleneck pattern should be overcome to expand the range of action, it is possible to derive motivation to overcome the bottleneck pattern and reduce the psychological load that passes through the bottleneck pattern. It becomes possible.
- the bottleneck pattern is displayed together with the actionable range at the position of the bottleneck pattern on the map, even if the driver goes to the bottleneck pattern The driver can know in advance whether he / she is heading toward a bottleneck pattern, and the psychological load that passes through the bottleneck pattern can be reduced.
- the driver when the immature pattern is overcome, the driver is informed that the immature pattern has been overcome, so the driver can challenge to overcome the immature pattern while enjoying it like a game, and the psychology that passes through the points with insufficient experience It becomes possible to reduce the load.
- the driving support system 100 can be used in a vehicle, so that points of patterns that the user has never experienced can be grasped in advance. Thus, it is possible to reduce the psychological load that passes through the bottleneck pattern overseas.
- Modification 1 In the above-described embodiment, the configuration in which the display indicating the bottleneck pattern is performed by superimposing the icon indicating the type of the bottleneck pattern on the map and performing the display is shown, but the present invention is not necessarily limited thereto. For example, it is good also as a structure (henceforth modification 1) which displays the bottleneck pattern by displaying the list etc. which showed the kind of bottleneck pattern.
- the driver can know which bottleneck pattern should be overcome to expand the possible range of action. Therefore, the driver draws motivation to overcome the bottleneck pattern from the driver, and the bottleneck pattern It becomes possible to reduce the psychological load of the driver who passes the vehicle.
- the configuration in which it is determined that the immature pattern is overcome when the number of experiences of the immature pattern reaches a predetermined number of times or more is not necessarily limited thereto.
- it may be configured to determine that the immature pattern has been overcome when the difference between the behavior of the vehicle at the time of passing the immature pattern and the model behavior is a predetermined value or less (hereinafter, modified example 2). .
- the behavior of the host vehicle may be specified from the time change of the value detected by a sensor that detects the motion of the host vehicle such as a vehicle speed sensor, an acceleration sensor, or a rudder angle sensor.
- a sensor that detects the motion of the host vehicle such as a vehicle speed sensor, an acceleration sensor, or a rudder angle sensor.
- a value specified by simulation or experiment in advance for each node pattern and node link may be stored in advance in the memory or the like of the control device 7.
- Modification 3 it is determined whether or not the immature pattern has been overcome, and when it is determined that the pattern has been overcome, a notification that indicates that the pattern has been overcome is shown. For example, it is determined whether the bottleneck pattern of the immature patterns has been overcome, and when it is determined that the bottleneck pattern has been overcome, a notification that indicates that the bottleneck pattern has been overcome and that the actionable range has been expanded (hereinafter, modified example 3) is performed. ).
- the above-described overcoming notification process may be configured to perform processing only on the bottleneck patterns stored in the bottleneck storage unit 29 among the immature patterns. If it is determined that the bottleneck pattern has been overcome, the overcome bottleneck pattern may be excluded from the bottleneck storage unit 79.
- the immature pattern for notifying overcoming is limited to the bottleneck pattern among the immature patterns.
- the bottleneck pattern is an immature pattern that hinders the actionable range among the immature patterns. Therefore, when the bottleneck pattern is overcome, the actionable range is surely expanded.
- the driver when the actionable range is expanded, the driver is notified that the overcome bottleneck pattern and the actionable range are expanded, so that the driver can more effectively overcome the immature pattern. You will be able to overcome the immature pattern while feeling it. As a result, the driver's motivation for overcoming the immature pattern can be further increased.
- the bottleneck pattern may be ranked according to the size of the actionable range that expands if the bottleneck pattern is overcome, and the ranking result may be presented to the driver (hereinafter, modified example 4).
- Modification 4 will be described.
- the driving support system 100 according to the modified example 4 is the driving according to the first embodiment except that the control device 7 further includes a post-overcoming range specifying unit 81 and a ranking unit 82 and the processing in the control device 7 is partially different. The same as the support system 100.
- the control device 7 in Modification 4 includes a pattern determination unit 71, a learning unit 72, a count storage unit 73, a route search unit 74, an immature pattern specification unit 75, a range specification unit 76, a display processing unit 77, a bottleneck specification unit 78, A bottleneck storage unit 79, an overcoming determination unit 80, a post-overcoming range specifying unit 81, and a ranking unit 82 are provided.
- the post-overcoming range specifying unit 81 specifies an actionable range that expands when the bottleneck pattern is temporarily overcome (hereinafter referred to as an actionable range after overcoming).
- the ranking unit 82 ranks the bottleneck pattern according to the size of the actionable range that expands when the bottleneck pattern is overcome.
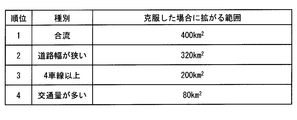
- the ranking display process is a process of ranking the bottleneck pattern according to the size of the actionable range that expands when the bottleneck pattern is overcome and displaying the ranking result.
- the flow chart of FIG. 9 may be configured to start when, for example, the driver makes a bottleneck pattern ranking display request via the operation switch group 5.
- the action specifying range is already specified by the range specifying unit 76
- the bottleneck pattern is already specified by the bottleneck specifying unit 78
- the specified bottleneck pattern is stored in the bottleneck storage unit 79. The description will be made assuming that
- the post-overcoming range specifying unit 81 selects one type of bottleneck pattern from the bottleneck patterns stored in the bottleneck storage unit 79.
- the configuration may be such that the bottleneck patterns are selected in the order of the list.
- step S82 the bottleneck pattern selected in S81 is temporarily allowed to pass, while the remaining bottleneck patterns are not allowed to pass, and further route search is performed from the search end point when the action specifying range is specified by the range specifying unit 76. I do. For example, when the search end point corresponds to the bottleneck pattern selected in S81, the search end point is allowed to pass, and the route search is performed beyond the search end point. On the other hand, if the search end point does not correspond to the bottleneck pattern selected in S81, the search end point remains impassable, and the route search ends at the search end point.
- step S83 the bottleneck pattern selected in S81 is a range surrounded by connecting the search end points of the plurality of routes obtained as a result of the route search in S82 in the same manner as in S45. It is specified as the possible range of action after overcoming the problem. Therefore, the post-overcoming range specifying unit 81 corresponds to the post-overcoming specifying unit.
- step S84 when the identification of the actionable range after overcoming all the bottleneck patterns stored in the bottleneck storage unit 79 is completed (YES in S84), the process proceeds to step S85. On the other hand, if at least one type of bottleneck pattern stored in the bottleneck storage unit 79 has not yet been identified (NO in S84), the process returns to S81 to return to the actionable range after overcoming. The process is repeated for the bottleneck pattern for which the identification of is not completed.
- the ranking unit 82 uses the range specifying unit 76 for all bottleneck patterns stored in the bottleneck storage unit 79 based on the post-overcoming action possible range specified by the post-overcoming range specifying unit 81. Ranking is performed according to the size of the range expanded from the identified actionable range. Therefore, the ranking unit 82 corresponds to the rank specifying unit of the claims. As an example, it may be configured such that the higher the extension distance of the map network is, the higher the ranking is, and the higher the ranking is as the area of the post-overcoming action possible range specified by the post-overcoming range specifying unit 81 increases. It is good also as a structure.
- step S86 the display device 3 is caused to display the result of ranking performed by the ranking unit 82.
- the display result of the ranking result may be an aspect in which the ranking of the size of the actionable range that expands when overcoming is recognized for each bottleneck pattern.
- FIG. 10 a list display in which the types of bottleneck patterns and the area of the actionable range that expands when overcome is performed in the order of the size of the actionable range that expands when overcome is performed. It is sufficient to adopt a configuration that allows
- the driver can know the order of the range of the actionable range that is expanded when the bottleneck pattern is overcome for each bottleneck pattern, so the actionable range can be efficiently expanded.
- the driver can recognize the bottleneck pattern that must be overcome with priority. As a result, it is possible for the driver to efficiently expand the possible range of action.
- Modification 5 Moreover, it is good also as a structure (modification 5) which displays the actionable range which expands when a bottleneck pattern is overcome according to a bottleneck pattern.
- the display processing unit 77 displays the post-overcoming action possible range specified by the post-overcoming range specifying unit 81 on the display device 3 by superimposing on the map for each bottleneck pattern. What is necessary is just to make it the structure to make.
- the display processing unit 77 performs an action after overcoming the selected bottleneck pattern. What is necessary is just to set it as the structure etc. which are displayed on the display apparatus 3 by superimposing a possible range on a map.
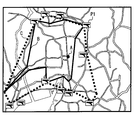
- FIG. 11 shows an example of a display of the possible action range after overcoming.
- the possible range is shown.
- a in FIG. 11 indicates the above-described starting position
- the dotted line C indicates the possible range of action after overcoming
- P1 indicates an icon indicating the bottleneck pattern “join”.
- the driver since the range of action that can be expanded when the bottleneck pattern is overcome is displayed superimposed on the map, the driver can determine how much the range of action that can be expanded when the bottleneck pattern is overcome. Can be intuitively recognized.
- Modification 6 Moreover, when displaying the overcoming action possible range that expands when the bottleneck pattern is overcome as in the modified example 5 and displaying it in a superimposed manner on the map, the configuration is displayed so that it can be compared with the actionable range before overcoming the bottleneck pattern. (Hereinafter, Modification 6) may be adopted.
- the actionable range before overcoming the bottleneck pattern may be configured to use the actionable range specified by the range specifying unit 76.
- a line type indicating the actionable range after overcoming As an example of an aspect in which the actionable range after overcoming and the actionable range before overcoming the bottleneck pattern are displayed in a comparable manner, as shown in FIG. 12, a line type indicating the actionable range after overcoming (see FIG. 12).
- a line type (B in FIG. 12) indicating a possible range of action before overcoming the bottleneck pattern is made different and displayed on the map at the same time.
- Modification 7 Moreover, it is good also as a structure (henceforth the modification 7) which shows a driver the bottleneck pattern which needs to be overcome in order to reach the destination which a driver wants to visit.
- Modification 7 will be described.
- the driving support system 100 of the modified example 7 is the same as that of the first embodiment except that the control device 7 further includes a destination setting unit 83 and a bottleneck extraction unit 84, and the processing in the control device 7 is partially different. This is the same as the driving support system 100.
- control device 7 in the modified example 7 will be described with reference to FIG. In FIG. 13, for the sake of convenience, only functional blocks necessary for the description of the modified example 7 are shown among the functional blocks provided in the control device 7.
- the control device 7 in Modification 7 includes a pattern determination unit 71, a learning unit 72, a count storage unit 73, a route search unit 74, an immature pattern specifying unit 75, a range specifying unit 76, a display processing unit 77, a bottleneck specifying unit 78, A bottleneck storage unit 79, an overcoming determination unit 80, a destination setting unit 83, and a bottleneck extraction unit 84 are provided.
- the destination setting unit 83 sets a location input from the driver via the operation switch group 5 as a destination.
- the bottleneck extraction unit 84 will be described in detail later.
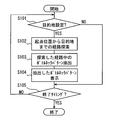
- the overcoming target display process in the control device 7 will be described with reference to the flowchart of FIG.
- the overcoming target display process is a process of displaying a bottleneck pattern that needs to be overcome in order to reach the destination.
- the flowchart in FIG. 14 may be configured to start when the control device 7 is turned on, for example, by turning on the ignition power of the host vehicle.
- the description will be made on the assumption that the bottleneck pattern specified by the bottleneck specifying unit 78 is stored in the bottleneck storage unit 79.
- step S101 when the destination setting unit 83 sets the destination (YES in S101), the process proceeds to step S102. On the other hand, when the destination setting unit 83 has not set the destination (NO in S101), the process proceeds to step S105.
- step S102 the route searching unit 74 searches for a recommended route from the above-described starting position to the destination set by the destination setting unit 83.
- a recommended route search an optimum route satisfying preset search conditions such as distance priority and time priority is searched from the origin position, the destination, and the data of the map DB 2 according to a known route search method. .
- the bottleneck extraction unit 84 refers to the bottleneck pattern stored in the bottleneck storage unit 79, and the node pattern associated with the node and the link in the recommended route searched in S102 in the map DB2. Among the link patterns, the pattern corresponding to the bottleneck pattern is extracted. Therefore, the bottleneck extraction unit 84 corresponds to the overcoming target specifying unit in the claims.
- step S104 the display processing unit 77 causes the display device 3 to display the bottleneck pattern extracted in S103.
- the bottleneck pattern extracted in S103 corresponds to the overcoming target pattern in the claims.
- the configuration may be such that the bottleneck pattern is displayed in a list in the order of appearance when the recommended route is advanced from the starting position to the destination, or the bottleneck pattern on the recommended route shown on the map It is good also as a structure which displays the icon which shows the classification of a bottleneck pattern in the position.
- the extracted bottleneck pattern types may be simply displayed as a list.
- step S105 when it is the end timing of the overcoming target display process (YES in S105), the overcoming target display process is ended. If it is not the end timing of the overcoming goal display process (NO in S105), the process returns to S101 and the process is repeated.
- the end timing of the overcoming target display process there is a time when the power source of the control device 7 is turned off because the ignition power source of the host vehicle is turned off.
- Modification 8 Moreover, it is good also as a structure (henceforth the modification 8) which shows the information of the plant
- the driving support system 100 according to the modified example 8 further includes a post-overcoming range specifying unit 81, a post-overcoming range selecting unit 85, and a facility specifying unit 86 in the control device 7, and the processing in the control device 7 is partially different. Is the same as the driving support system 100 of the first embodiment.
- the control device 7 in Modification 8 includes a pattern determination unit 71, a learning unit 72, a count storage unit 73, a route search unit 74, an immature pattern specification unit 75, a range specification unit 76, a display processing unit 77, a bottleneck specification unit 78, A bottleneck storage unit 79, an overcoming determination unit 80, a post-overcoming range specifying unit 81, a post-overcoming range selecting unit 85, and a facility specifying unit 86 are provided.
- the post-overcoming range specifying unit 81 is the same as that described in the fourth modification.
- the post-overcoming range selection unit 85 selects the post-overcoming action possible range for the bottleneck pattern requested from the driver via the operation switch group 5 from the post-overcoming action possible range specified by the post-overcoming range specifying unit 81. select.
- the facility specifying unit 86 specifies a facility that can be newly reached when the actionable range specified by the range specifying unit 76 extends to the post-overcoming actionable range selected by the post-overcoming range selection unit 85.
- the overcoming arrival facility display process is a process of displaying information on a facility that can be newly reached by the driver when the bottleneck pattern is temporarily overcome.
- the 16 may be configured to start when the control device 7 is turned on, for example, when the ignition power of the host vehicle is turned on.
- the description will be made on the assumption that the bottleneck pattern specified by the bottleneck specifying unit 78 is stored in the bottleneck storage unit 79.
- step S121 the post-overcoming range specifying unit 81 specifies the post-overcoming action possible range in the same manner as described in the fourth modification.
- step S122 when the identification of the range of possible action after overcoming has been completed for all the bottleneck patterns stored in the bottleneck storage unit 79 (YES in S122), the process proceeds to step S123. On the other hand, if at least one type of bottleneck pattern stored in the bottleneck storage unit 79 has not been identified (see NO in S122), the process proceeds to S125.
- step S123 when the post-overcoming range selection unit 85 selects the post-overcoming action possible range (YES in S123), the process proceeds to step S124. On the other hand, if the post-overcoming range selection unit 85 does not select the post-overcoming action possible range (NO in S123), the process proceeds to step S125.
- step S124 the facility that can be newly reached by the facility specifying unit 86 when the actionable range specified by the range specifying unit 76 extends to the post-overcoming actionable range selected by the post-overcoming range selection unit 85. Is identified.
- the facility located in a range obtained by subtracting the actionable range specified by the range specifying unit 76 from the actionable range after overcoming selected by the range selecting unit 85 after overcoming may be configured to identify several facilities that rank higher in the ranking of the number of users, evaluation, and the like. In addition, it is good also as a structure etc. which identify the facility with the same classification as the facility which a driver uses frequently. It can be said that a facility with the same type as a facility that ranks higher in the number of users, evaluations, etc. or that is often used by the driver is a recommended facility that is estimated to attract the driver's interest.
- step S125 the display processing unit 77 causes the display device 3 to display the information on the facility specified in S124.
- the facility information may be displayed in such a manner that a facility name or an icon indicating the facility is displayed at the location of the facility on the map, or text describing the content of the facility is displayed.
- step S126 when the types of bottleneck patterns stored in the bottleneck storage unit 79 are reduced and the bottleneck patterns are newly overcome (YES in S126), the process returns to S121 and is repeated. On the other hand, when the bottleneck pattern is not newly overcome (NO in S126), the process proceeds to step S127.
- step S127 when it is the end timing of the overcoming arrival facility display processing (YES in S127), the overcoming arrival facility display processing is ended. If it is not the end timing of the overcoming arrival facility display process (NO in S127), the process returns to S121 and is repeated.
- An example of the end timing of the overcoming arrival facility display process is when the power supply of the control device 7 is turned off because the ignition power of the host vehicle is turned off.
- Modification 9 The various processes described above may be performed for each driver.
- the experience count learning process for each driver is performed to store the node pattern and node link experience count for each driver
- the immature pattern for each driver is specified to display the possible action range for each driver, What is necessary is just to set it as the structure which memorize
- the individual driver may be configured to use, for example, a weight scale or a pressure sensor provided in the seating portion of the driver's seat and specify the weight measured by the weight scale and the detected value by the pressure sensor.
- the configuration may be such that an individual driver is specified from the ID received from the electronic key.
- a mobile terminal such as a multi-function mobile phone having a GPS function may be used.
- each section is expressed as, for example, S1. Further, each section can be divided into a plurality of subsections, while a plurality of sections can be combined into one section. Further, each section configured in this manner can be referred to as a device, module, or means.
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Mathematical Physics (AREA)
- Theoretical Computer Science (AREA)
- Business, Economics & Management (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- Social Psychology (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Navigation (AREA)
- Instructional Devices (AREA)
- Traffic Control Systems (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/310,482 US20170082449A1 (en) | 2014-06-04 | 2015-05-25 | Driving assistance device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014115955A JP6364975B2 (ja) | 2014-06-04 | 2014-06-04 | 運転支援装置 |
| JP2014-115955 | 2014-06-04 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015186310A1 true WO2015186310A1 (ja) | 2015-12-10 |
Family
ID=54766395
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/002633 Ceased WO2015186310A1 (ja) | 2014-06-04 | 2015-05-25 | 運転支援装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20170082449A1 (enExample) |
| JP (1) | JP6364975B2 (enExample) |
| WO (1) | WO2015186310A1 (enExample) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0636798Y2 (ja) | 1991-07-04 | 1994-09-28 | 賢一 飯嶋 | トイレットペーパーホルダー |
| JP7389541B2 (ja) * | 2017-08-10 | 2023-11-30 | いすゞ自動車株式会社 | 運行管理装置、運行管理方法及び運行管理システム |
| KR102694198B1 (ko) * | 2018-12-31 | 2024-08-13 | 현대자동차주식회사 | 자율 발렛 주차를 지원하는 시스템 및 방법, 그리고 이를 위한 인프라 및 차량 |
| JP2021119329A (ja) * | 2020-01-30 | 2021-08-12 | 本田技研工業株式会社 | 情報提供装置、車両及び情報提供方法 |
| US11993270B2 (en) * | 2021-12-03 | 2024-05-28 | Bendix Commercial Vehicle Systems, Llc | System and method for driving style driver identity determination and control of vehicle functions |
| JP7544777B2 (ja) * | 2022-09-29 | 2024-09-03 | 本田技研工業株式会社 | 管理システム、管理装置及び管理方法 |
| WO2024186074A1 (ko) * | 2023-03-06 | 2024-09-12 | 엘지전자 주식회사 | 주행 모드 표시 장치 및 주행 모드 표시 방법 |
| FR3149850A1 (fr) * | 2023-06-19 | 2024-12-20 | Psa Automobiles Sa | Procédé de guidage d’un véhicule automobile, dispositif et véhicule associés. |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10185603A (ja) * | 1996-12-20 | 1998-07-14 | Mazda Motor Corp | ナビゲーション装置 |
| JP2006047092A (ja) * | 2004-08-04 | 2006-02-16 | Nissan Motor Co Ltd | ナビゲーション装置 |
| JP2006133148A (ja) * | 2004-11-09 | 2006-05-25 | Xanavi Informatics Corp | ナビゲーション装置 |
| JP2006232174A (ja) * | 2005-02-25 | 2006-09-07 | Nissan Motor Co Ltd | 車両用運転支援装置 |
| JP2007205765A (ja) * | 2006-01-31 | 2007-08-16 | Equos Research Co Ltd | 経路探索装置 |
| JP2008139146A (ja) * | 2006-12-01 | 2008-06-19 | Matsushita Electric Ind Co Ltd | ナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラム |
| JP2008157891A (ja) * | 2006-12-26 | 2008-07-10 | Denso It Laboratory Inc | ナビゲーション装置、ナビゲーション方法、ナビゲーションプログラム |
| JP2010223681A (ja) * | 2009-03-23 | 2010-10-07 | Denso Corp | ナビゲーション装置 |
| JP2012117877A (ja) * | 2010-11-30 | 2012-06-21 | Denso Corp | 移動スキル情報提供装置 |
| JP2013205227A (ja) * | 2012-03-28 | 2013-10-07 | Denso It Laboratory Inc | 苦手道路属性検出装置、苦手道路属性検出方法およびプログラム |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020161887A1 (en) * | 2001-04-27 | 2002-10-31 | Foster Michael S. | Method and system for performing security via de-registration in a communications network |
| US20090000596A1 (en) * | 2007-06-29 | 2009-01-01 | Paul Spivak | E85 Vehicle Compatibility Kit |
| JP4554653B2 (ja) * | 2007-08-08 | 2010-09-29 | クラリオン株式会社 | 経路探索方法、経路探索システムおよびナビゲーション装置 |
| US8694246B2 (en) * | 2012-05-15 | 2014-04-08 | Qualcomm Incorporated | Methods and systems for displaying enhanced turn-by-turn guidance on a personal navigation device |
-
2014
- 2014-06-04 JP JP2014115955A patent/JP6364975B2/ja not_active Expired - Fee Related
-
2015
- 2015-05-25 WO PCT/JP2015/002633 patent/WO2015186310A1/ja not_active Ceased
- 2015-05-25 US US15/310,482 patent/US20170082449A1/en not_active Abandoned
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10185603A (ja) * | 1996-12-20 | 1998-07-14 | Mazda Motor Corp | ナビゲーション装置 |
| JP2006047092A (ja) * | 2004-08-04 | 2006-02-16 | Nissan Motor Co Ltd | ナビゲーション装置 |
| JP2006133148A (ja) * | 2004-11-09 | 2006-05-25 | Xanavi Informatics Corp | ナビゲーション装置 |
| JP2006232174A (ja) * | 2005-02-25 | 2006-09-07 | Nissan Motor Co Ltd | 車両用運転支援装置 |
| JP2007205765A (ja) * | 2006-01-31 | 2007-08-16 | Equos Research Co Ltd | 経路探索装置 |
| JP2008139146A (ja) * | 2006-12-01 | 2008-06-19 | Matsushita Electric Ind Co Ltd | ナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラム |
| JP2008157891A (ja) * | 2006-12-26 | 2008-07-10 | Denso It Laboratory Inc | ナビゲーション装置、ナビゲーション方法、ナビゲーションプログラム |
| JP2010223681A (ja) * | 2009-03-23 | 2010-10-07 | Denso Corp | ナビゲーション装置 |
| JP2012117877A (ja) * | 2010-11-30 | 2012-06-21 | Denso Corp | 移動スキル情報提供装置 |
| JP2013205227A (ja) * | 2012-03-28 | 2013-10-07 | Denso It Laboratory Inc | 苦手道路属性検出装置、苦手道路属性検出方法およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170082449A1 (en) | 2017-03-23 |
| JP2015230548A (ja) | 2015-12-21 |
| JP6364975B2 (ja) | 2018-08-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6364975B2 (ja) | 運転支援装置 | |
| AU2018266108B2 (en) | Destination changes in autonomous vehicles | |
| US6810328B2 (en) | Navigation method and system for indicating area-specific traffic information | |
| JP6727868B2 (ja) | 経路案内装置、経路案内システム、経路案内方法及び経路案内プログラム | |
| JP6447725B2 (ja) | 候補経路提供システム、車載装置及び候補経路提供方法 | |
| KR20200029587A (ko) | 주행 지원 방법 및 주행 지원 장치 | |
| JP5772247B2 (ja) | 歩行者端末装置、コンピュータプログラム、及び、情報報知方法 | |
| JP2011215080A (ja) | 経路探索装置および経路案内システム | |
| JP2011196931A (ja) | ナビゲーション装置とその経路探索方法、サーバ装置とその経路探索方法 | |
| JP5795706B2 (ja) | ナビゲーション装置 | |
| JP6318757B2 (ja) | ナビゲーション装置及び車両制御システム | |
| JP2018146271A (ja) | 電子装置、交差点案内プログラムおよび交差点案内方法 | |
| JP6578234B2 (ja) | 検索システム、検索方法、検索プログラム、記憶媒体 | |
| JP4842588B2 (ja) | ナビゲーション用アプリケーションのプログラム、携帯端末装置および表示方法 | |
| JP4082273B2 (ja) | 位置情報報知装置およびプログラム | |
| JP6164153B2 (ja) | 推奨ルート探索装置および推奨ルート探索装置用のプログラム | |
| JP2012149957A (ja) | 車載地図表示装置 | |
| JP2011137803A (ja) | ナビゲーションシステム、ナビゲーション装置、及びサーバ装置 | |
| JP4393403B2 (ja) | 経路案内装置および経路案内方法 | |
| JP4662753B2 (ja) | ナビゲーション装置および通信センタ | |
| JP4335935B2 (ja) | ナビサーバ、ナビシステム | |
| JP2016142986A (ja) | 地図表示システム、地図表示プログラム、及び地図表示方法 | |
| JP2012117925A (ja) | 車載機器、車載機器の制御方法、及び、プログラム | |
| JP2018195073A (ja) | 情報処理サーバ | |
| JP2017173107A (ja) | 経路生成装置、経路生成方法、プログラム及び記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15802357 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15310482 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 15802357 Country of ref document: EP Kind code of ref document: A1 |