WO2015068662A1 - 光学式エンコーダユニット及び光学式エンコーダ - Google Patents
光学式エンコーダユニット及び光学式エンコーダ Download PDFInfo
- Publication number
- WO2015068662A1 WO2015068662A1 PCT/JP2014/079131 JP2014079131W WO2015068662A1 WO 2015068662 A1 WO2015068662 A1 WO 2015068662A1 JP 2014079131 W JP2014079131 W JP 2014079131W WO 2015068662 A1 WO2015068662 A1 WO 2015068662A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- light
- light receiving
- unit
- optical
- optical sensor
- Prior art date
Links
- 230000003287 optical effect Effects 0.000 title claims abstract description 350
- 230000010287 polarization Effects 0.000 claims abstract description 73
- 230000003321 amplification Effects 0.000 claims description 2
- 238000003199 nucleic acid amplification method Methods 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 55
- 239000010410 layer Substances 0.000 description 49
- 239000000758 substrate Substances 0.000 description 43
- 230000004048 modification Effects 0.000 description 31
- 238000012986 modification Methods 0.000 description 31
- 101710170231 Antimicrobial peptide 2 Proteins 0.000 description 28
- 102100040678 Programmed cell death protein 1 Human genes 0.000 description 22
- 101710170230 Antimicrobial peptide 1 Proteins 0.000 description 14
- 239000002184 metal Substances 0.000 description 12
- 230000006870 function Effects 0.000 description 11
- 238000000926 separation method Methods 0.000 description 10
- 229910001111 Fine metal Inorganic materials 0.000 description 9
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 9
- 238000005259 measurement Methods 0.000 description 9
- 238000000034 method Methods 0.000 description 9
- 229910052710 silicon Inorganic materials 0.000 description 9
- 239000010703 silicon Substances 0.000 description 9
- 239000012790 adhesive layer Substances 0.000 description 8
- 239000004065 semiconductor Substances 0.000 description 8
- 239000008186 active pharmaceutical agent Substances 0.000 description 7
- HODRFAVLXIFVTR-RKDXNWHRSA-N tevenel Chemical compound NS(=O)(=O)C1=CC=C([C@@H](O)[C@@H](CO)NC(=O)C(Cl)Cl)C=C1 HODRFAVLXIFVTR-RKDXNWHRSA-N 0.000 description 7
- 229910000679 solder Inorganic materials 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 239000004020 conductor Substances 0.000 description 2
- 239000000470 constituent Substances 0.000 description 2
- 230000014509 gene expression Effects 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 101710089372 Programmed cell death protein 1 Proteins 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000002844 melting Methods 0.000 description 1
- 230000008018 melting Effects 0.000 description 1
- 238000004806 packaging method and process Methods 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 239000002861 polymer material Substances 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/3473—Circular or rotary encoders
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/344—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using polarisation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/344—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using polarisation
- G01D5/345—Polarising encoders
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/34707—Scales; Discs, e.g. fixation, fabrication, compensation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/34707—Scales; Discs, e.g. fixation, fabrication, compensation
- G01D5/34715—Scale reading or illumination devices
Abstract
Description
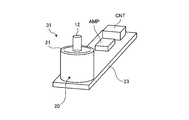
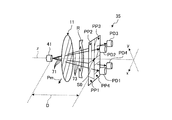
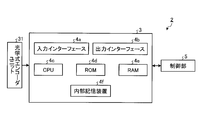
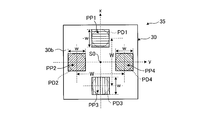
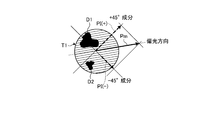
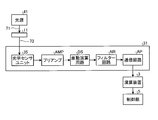
図1は、実施形態1に係る光学式エンコーダユニットの構成図である。図2は、実施形態1に係る光学式エンコーダユニットの外観斜視図である。図1は、図2の断面模式図である。図3は、光学スケール及び光学センサユニットの配置の一例を説明する説明図である。図4は、実施形態1に係る光学式エンコーダのブロック図である。図5は、実施形態1に係る光学スケールのパターンの一例を示す説明図である。光学式エンコーダユニット31は、モータ等の回転機械に連結されたシャフト12を有するロータ10と、ステータ20と、信号パターンを読み取り可能な光学センサユニット35とを有している。

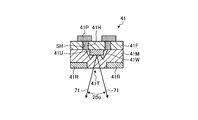
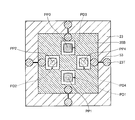
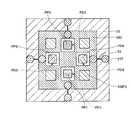
図22は、実施形態2に係る光学式エンコーダユニットの構成図である。図23は、実施形態2に係る光学スケール及び光学センサユニットの配置の一例を説明する説明図である。なお、上述したものと同じ部材には同一の符号を付して重複する説明は省略する。光学式エンコーダユニット31は、光源41の光源光71が光学スケール11に反射し、この反射した反射光を入射光72として第1受光部PD1、第3受光部PD3、第2受光部PD2及び第4受光部PD4を有する光学センサユニット35Aが検知する。光源41の出射面と、配置中心S0(光学センサユニット35)との距離Dは、鏡面反射として、実施形態1の半分になる。なお、図22に示すように、実施形態2に係る光学式エンコーダユニット31は、円環状の遮光板17を有している。これにより、遮光板17が不要な反射を抑制できるため、測定精度を向上することができる。
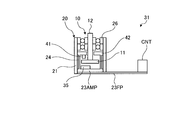
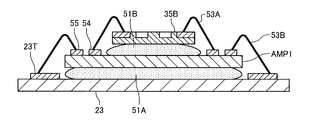
図24は、実施形態3に係る光学式エンコーダユニットの構成図である。なお、上述したものと同じ部材には同一の符号を付して重複する説明は省略する。実施形態3に係る光学式エンコーダユニット31は、実施形態1と同じ透過型の光学スケール及び光学センサの配置であるが、実施形態1と異なり、基板23がフレキシブル基板23FPとなっている。プリアンプAMPは、パッケージ品のアンプ上に直接光学センサユニット35Aを積層している。プリアンプAMPがカバー21内部に内臓されるので、耐久性を高めることができる。プリアンプAMPは、ベアチップ上に受光素子と増幅回路と搭載してもよい。また、プリアンプAMPは、受光素子と増幅回路とを半導体プロセスで一体的に形成してもよい。
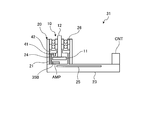
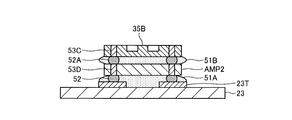
図25は、実施形態4に係る光学式エンコーダユニットの構成図である。なお、上述したものと同じ部材には同一の符号を付して重複する説明は省略する。実施形態4に係る光学式エンコーダユニット31は、実施形態2と同じ反射型の光学スケール及び光学センサの配置であるが、実施形態2と異なり、基板23がフレキシブル基板23FPとなっている。プリアンプAMPは、パッケージ品のアンプ上に直接に光学センサユニット35を積層している。プリアンプAMPがカバー21の内部に内臓されるので、耐久性を高めることができる。プリアンプAMPは、ベアチップ上に受光素子と増幅回路と搭載してもよい。また、プリアンプAMPは、受光素子と増幅回路とを半導体プロセスで一体的に形成してもよい。
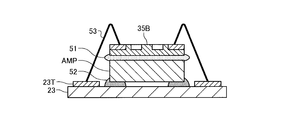
図26は、実施形態5に係る光学式エンコーダユニットの構成図である。なお、上述したものと同じ部材には同一の符号を付して重複する説明は省略する。実施形態5に係る光学式エンコーダユニット31は、実施形態1と同じ透過型の光学スケール及び光学センサの配置であるが、実施形態1と異なり、プリアンプAMPは、増幅回路の集積回路がパッケージされたパッケージ品のアンプ上に光学センサユニット35Bを直接積層している。
3 演算装置
5 制御部
10 ロータ
11 光学スケール
12 シャフト
17 遮光板
20 ステータ
21 カバー
23 基板
23FP フレキシブル基板
24、25 配線
26 軸受
30 ユニット基材
30b 表面
31 光学式エンコーダユニット
35、35A、35B 光学センサユニット
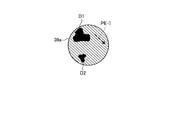
39a 第1偏光層
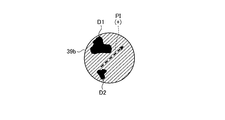
39b 第2偏光層
41 光源
41T 出射面
71 光源光
72、73 入射光
AMP プリアンプ
AP 逓倍回路
CNT コネクタ
D 距離
Vc 差動信号
Vs 差動信号
Claims (10)
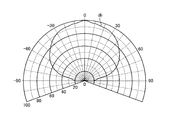
- 所定の配光分布を有する光源と、
面内における偏光子の偏光方向が所定の方向を向いており、かつ偏光方向が回転により変化する光学スケールと、
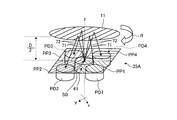
前記光源の光源光が前記光学スケールに透過又は反射して入射する入射光を受光する第1受光部、第2受光部、第3受光部及び第4受光部を備える光学センサユニットとを含み、
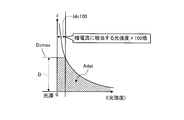
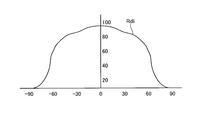
前記光源の出射面と前記光学センサユニットとは、前記光学センサユニットの暗電流に相当する光強度の所定倍以上を受光可能な位置に配置されている光学式エンコーダユニット。 - 前記光源の出射面と前記光学センサユニットとは、前記光学センサユニットの暗電流に相当する光強度の100倍以上を受光可能な位置に配置されている請求項1に記載の光学式エンコーダユニット。
- 前記光源の出射面と前記光学センサユニットとは、前記光学センサユニットの暗電流に相当する光強度の1000倍以上を受光可能な位置に配置されている請求項2に記載の光学式エンコーダユニット。
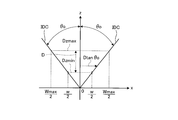
- 前記第1受光部、前記第2受光部、前記第3受光部及び前記第4受光部は、それぞれ配置中心から等距離に配置されており、
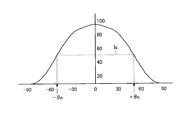
前記第1受光部、前記第2受光部、前記第3受光部及び前記第4受光部は、前記光源の配光分布が一様な範囲以内に配置されて受光する請求項1から3のいずれか1項に記載の光学式エンコーダユニット。 - 前記第1受光部、前記第2受光部、前記第3受光部及び前記第4受光部は、前記入射光をそれぞれ異なる偏光方向に分離する偏光層を介して受光する請求項1から4のいずれか1項に記載の光学式エンコーダユニット。
- 円筒状のカバーと、前記カバーの内側に取り付けられた軸受により支持されて回転自在なシャフトとをさらに備え、
前記カバーは、前記シャフトに取り付けられた前記光学スケールと、前記光源と、前記光学センサユニットとを囲む請求項1から5のいずれか1項に記載の光学式エンコーダユニット。 - 前記第1受光部、前記第2受光部、前記第3受光部及び前記第4受光部を含む第1ベアチップと、前記第1受光部、前記第2受光部、前記第3受光部及び前記第4受光部のそれぞれの信号を増幅する増幅回路とを備え、前記第1ベアチップと前記増幅回路とが平面視で重なり合う位置に固定されて電気的に接続されている請求項1から6のいずれか1項に記載の光学式エンコーダユニット。
- 前記第1受光部、前記第2受光部、前記第3受光部及び前記第4受光部を含み、かつ、前記第1受光部、前記第2受光部、前記第3受光部及び前記第4受光部のそれぞれの信号を増幅する増幅回路とが集積されたベアチップとなっている請求項1から6のいずれか1項に記載の光学式エンコーダユニット。
- 請求項1から8のいずれか1項に記載の光学式エンコーダユニットと、
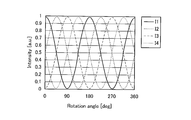
前記第1受光部、前記第2受光部、前記第3受光部及び前記第4受光部が検出する光強度から、前記光学スケールと前記光学センサユニットとの相対的な移動量を演算する演算手段と、を含む光学式エンコーダ。 - 前記光学スケールの回転位置が0°以上180°未満の範囲にあるか、180°以上360°未満の範囲にあるかを記憶装置に記憶し、起動時に読み出す演算手段を有し、前記光学スケールと前記光学センサユニットとの絶対的な移動量を演算する請求項9に記載の光学式エンコーダ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/034,076 US10156459B2 (en) | 2013-11-05 | 2014-10-31 | Optical encoder unit, and optical encoder |
| JP2015546627A JP6369474B2 (ja) | 2013-11-05 | 2014-10-31 | 光学式エンコーダユニット及び光学式エンコーダ |
| CN201480059252.XA CN105683718B (zh) | 2013-11-05 | 2014-10-31 | 光学式编码器单元以及光学式编码器 |
| EP14860233.7A EP3067668B1 (en) | 2013-11-05 | 2014-10-31 | Optical encoder unit and optical encoder |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013229565 | 2013-11-05 | ||
| JP2013-229565 | 2013-11-05 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015068662A1 true WO2015068662A1 (ja) | 2015-05-14 |
Family
ID=53041439
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2014/079131 WO2015068662A1 (ja) | 2013-11-05 | 2014-10-31 | 光学式エンコーダユニット及び光学式エンコーダ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10156459B2 (ja) |
| EP (1) | EP3067668B1 (ja) |
| JP (2) | JP6369042B2 (ja) |
| CN (1) | CN105683718B (ja) |
| WO (1) | WO2015068662A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107095644A (zh) * | 2016-02-19 | 2017-08-29 | 光宝光电(常州)有限公司 | 光感测器模组及具有该光感测器模组的穿戴装置 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017145345A1 (ja) * | 2016-02-25 | 2017-08-31 | 日本精工株式会社 | センサ |
| JP2018100837A (ja) * | 2016-12-19 | 2018-06-28 | セイコーエプソン株式会社 | エンコーダー、ロボットおよびプリンター |
| JP7080129B2 (ja) * | 2018-08-01 | 2022-06-03 | 株式会社トプコン | 角度検出システムおよび角度検出方法 |
| CN111024225B (zh) * | 2019-12-02 | 2021-12-31 | 西北核技术研究院 | 一种激光远场桶中功率分布曲线的绝对测量方法 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61225626A (ja) * | 1985-03-29 | 1986-10-07 | Mitsubishi Electric Corp | 光計測装置 |
| JPH06174494A (ja) * | 1992-12-09 | 1994-06-24 | Oki Electric Ind Co Ltd | エンコーダ |
| JP2000022196A (ja) * | 1998-04-28 | 2000-01-21 | Canare Electric Co Ltd | 量子波干渉層を有した受光素子 |
| JP2002208725A (ja) * | 2000-11-13 | 2002-07-26 | Mitsutoyo Corp | 受光素子アレイとこれを用いた光学式エンコーダ及び受光素子アレイの製造方法 |
| JP2008243869A (ja) * | 2007-03-26 | 2008-10-09 | Tdk Corp | 受光装置 |
| JP2009086609A (ja) * | 2007-10-01 | 2009-04-23 | Zero Rabo Kk | 回転位置検出回路及びプロジェクタ装置 |
| JP2009238792A (ja) * | 2008-03-26 | 2009-10-15 | Nec Corp | 光増幅装置および入力光レベル計算方法ならびに光増幅器制御装置 |
| JP2012168167A (ja) * | 2011-01-27 | 2012-09-06 | Mitsutoyo Corp | 光電式エンコーダ及びそのアライメント調整方法 |
| WO2013065737A1 (ja) | 2011-10-31 | 2013-05-10 | 日本精工株式会社 | 光学スケール、光学スケールの製造方法及び光学式エンコーダ |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01216213A (ja) * | 1988-02-25 | 1989-08-30 | Mitsutoyo Corp | 光学式変位検出器 |
| US4922095A (en) * | 1989-05-11 | 1990-05-01 | Conoco Inc. | Method and apparatus for sensing disturbance using fiber-optic polarization rotation |
| JP3349343B2 (ja) * | 1996-05-08 | 2002-11-25 | 山洋電気株式会社 | 光電式エンコーダ |
| US5981941A (en) | 1996-05-20 | 1999-11-09 | Matsushita Electric Industrial Co., Ltd. | Optical encorder for detection having a moving reference point |
| US5844673A (en) * | 1998-04-17 | 1998-12-01 | Cambridge Technology, Inc. | Axial led position detector for determining the angular position of a rotatable element |
| EP0954034A3 (en) | 1998-04-28 | 2000-01-26 | Canare Electric Co., Ltd. | Light receiving device with quantum-wave interference layers |
| JP3884707B2 (ja) * | 2000-06-15 | 2007-02-21 | スカンラブ アーゲー | スキャンニング装置用の位置検出器 |
| JP3695398B2 (ja) | 2002-01-30 | 2005-09-14 | 富士ゼロックス株式会社 | 光学式エンコーダ及びエンコーダ用スケール |
| JP4476682B2 (ja) | 2003-05-16 | 2010-06-09 | 株式会社ミツトヨ | 光電式エンコーダ |
| CN100346138C (zh) | 2004-03-17 | 2007-10-31 | 台达电子工业股份有限公司 | 旋转光学编码器、编码盘和旋转光学编码器的编码方法 |
| JP4364711B2 (ja) | 2004-04-14 | 2009-11-18 | シャープ株式会社 | 光学式エンコーダおよびそれを備えた電子機器 |
| JP4857785B2 (ja) * | 2006-01-27 | 2012-01-18 | ミツミ電機株式会社 | エンコーダ付モータ及びその組立方法 |
| US7777879B2 (en) * | 2007-02-01 | 2010-08-17 | Stmicroelectronics (Research & Development) Ltd. | Rotary encoders |
| JP2010230409A (ja) * | 2009-03-26 | 2010-10-14 | Olympus Corp | 光学式エンコーダ |
| JP5562077B2 (ja) * | 2010-03-10 | 2014-07-30 | キヤノン株式会社 | 光学式エンコーダ、エンコーダ、干渉計測装置、計測方法 |
| US8760852B2 (en) | 2012-04-24 | 2014-06-24 | Avx Corporation | Solid electrolytic capacitor containing multiple sinter bonded anode leadwires |
| EP2657652B1 (de) | 2012-04-27 | 2015-10-28 | SICK STEGMANN GmbH | Vorrichtung zur Messung des Drehwinkels zweier relativ zueinander um eine Drehachse rotierender Objekte |
-
2014
- 2014-02-12 JP JP2014024887A patent/JP6369042B2/ja active Active
- 2014-10-31 CN CN201480059252.XA patent/CN105683718B/zh not_active Expired - Fee Related
- 2014-10-31 JP JP2015546627A patent/JP6369474B2/ja active Active
- 2014-10-31 EP EP14860233.7A patent/EP3067668B1/en not_active Not-in-force
- 2014-10-31 US US15/034,076 patent/US10156459B2/en active Active
- 2014-10-31 WO PCT/JP2014/079131 patent/WO2015068662A1/ja active Application Filing
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61225626A (ja) * | 1985-03-29 | 1986-10-07 | Mitsubishi Electric Corp | 光計測装置 |
| JPH06174494A (ja) * | 1992-12-09 | 1994-06-24 | Oki Electric Ind Co Ltd | エンコーダ |
| JP2000022196A (ja) * | 1998-04-28 | 2000-01-21 | Canare Electric Co Ltd | 量子波干渉層を有した受光素子 |
| JP2002208725A (ja) * | 2000-11-13 | 2002-07-26 | Mitsutoyo Corp | 受光素子アレイとこれを用いた光学式エンコーダ及び受光素子アレイの製造方法 |
| JP2008243869A (ja) * | 2007-03-26 | 2008-10-09 | Tdk Corp | 受光装置 |
| JP2009086609A (ja) * | 2007-10-01 | 2009-04-23 | Zero Rabo Kk | 回転位置検出回路及びプロジェクタ装置 |
| JP2009238792A (ja) * | 2008-03-26 | 2009-10-15 | Nec Corp | 光増幅装置および入力光レベル計算方法ならびに光増幅器制御装置 |
| JP2012168167A (ja) * | 2011-01-27 | 2012-09-06 | Mitsutoyo Corp | 光電式エンコーダ及びそのアライメント調整方法 |
| WO2013065737A1 (ja) | 2011-10-31 | 2013-05-10 | 日本精工株式会社 | 光学スケール、光学スケールの製造方法及び光学式エンコーダ |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3067668A4 * |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107095644A (zh) * | 2016-02-19 | 2017-08-29 | 光宝光电(常州)有限公司 | 光感测器模组及具有该光感测器模组的穿戴装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN105683718B (zh) | 2018-05-15 |
| US10156459B2 (en) | 2018-12-18 |
| JPWO2015068662A1 (ja) | 2017-03-09 |
| EP3067668A4 (en) | 2017-10-04 |
| US20160282149A1 (en) | 2016-09-29 |
| EP3067668B1 (en) | 2019-01-30 |
| JP6369474B2 (ja) | 2018-08-08 |
| JP2015111089A (ja) | 2015-06-18 |
| CN105683718A (zh) | 2016-06-15 |
| JP6369042B2 (ja) | 2018-08-08 |
| EP3067668A1 (en) | 2016-09-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6369474B2 (ja) | 光学式エンコーダユニット及び光学式エンコーダ | |
| JP5999147B2 (ja) | センサ及びセンサの製造方法 | |
| JP6044599B2 (ja) | センサ | |
| JP6717352B2 (ja) | センサ | |
| JP2016114590A (ja) | センサの製造方法及びセンサ | |
| JP5954372B2 (ja) | 光学式センサ | |
| US10670430B2 (en) | Sensor | |
| WO2016021635A1 (ja) | 光センサ及び光学式エンコーダユニット | |
| JP6361377B2 (ja) | センサ | |
| US10337892B2 (en) | Sensor and method of manufacturing sensor | |
| JP6380589B2 (ja) | 光学式エンコーダユニット | |
| JP6736887B2 (ja) | ロータリエンコーダ及び光センサの製造方法 | |
| JP6354202B2 (ja) | 光学式エンコーダユニット及び光学式エンコーダ | |
| JP6459467B2 (ja) | センサ及びセンサの製造方法 | |
| WO2017022260A1 (ja) | センサの製造方法及びセンサ | |
| JP6421577B2 (ja) | センサ | |
| JP2015161539A (ja) | 光学式エンコーダユニット及び光学式エンコーダ | |
| WO2016021647A1 (ja) | センサ及びセンサの製造方法 | |
| JP2019035774A (ja) | 光学式エンコーダユニット及び光学式エンコーダ | |
| JP2018072099A (ja) | 光センサの製造方法 | |
| JP2016057127A (ja) | センサ及びセンサの製造方法 | |
| WO2017145344A1 (ja) | センサ、センサの基板及びセンサの製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14860233 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2015546627 Country of ref document: JP Kind code of ref document: A |
|
| REEP | Request for entry into the european phase |
Ref document number: 2014860233 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2014860233 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15034076 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |