JP7080129B2 - 角度検出システムおよび角度検出方法 - Google Patents
角度検出システムおよび角度検出方法 Download PDFInfo
- Publication number
- JP7080129B2 JP7080129B2 JP2018144786A JP2018144786A JP7080129B2 JP 7080129 B2 JP7080129 B2 JP 7080129B2 JP 2018144786 A JP2018144786 A JP 2018144786A JP 2018144786 A JP2018144786 A JP 2018144786A JP 7080129 B2 JP7080129 B2 JP 7080129B2
- Authority
- JP
- Japan
- Prior art keywords
- encoder pattern
- angle
- unit
- pattern
- encoder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 title claims description 80
- 238000005259 measurement Methods 0.000 claims description 102
- 239000000463 material Substances 0.000 claims description 28
- 230000010287 polarization Effects 0.000 claims description 27
- 230000003287 optical effect Effects 0.000 claims description 20
- 230000002093 peripheral effect Effects 0.000 claims description 13
- 238000009826 distribution Methods 0.000 claims description 11
- 239000010410 layer Substances 0.000 description 47
- 238000004891 communication Methods 0.000 description 30
- 238000004364 calculation method Methods 0.000 description 23
- 238000010586 diagram Methods 0.000 description 19
- 238000003860 storage Methods 0.000 description 12
- 238000000034 method Methods 0.000 description 11
- 230000006870 function Effects 0.000 description 7
- 238000012545 processing Methods 0.000 description 7
- 230000008569 process Effects 0.000 description 6
- 239000004372 Polyvinyl alcohol Substances 0.000 description 3
- 230000002238 attenuated effect Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 229920002451 polyvinyl alcohol Polymers 0.000 description 3
- 230000002829 reductive effect Effects 0.000 description 3
- 238000012937 correction Methods 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 229920000139 polyethylene terephthalate Polymers 0.000 description 2
- 239000005020 polyethylene terephthalate Substances 0.000 description 2
- 238000003825 pressing Methods 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000001228 spectrum Methods 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 239000011324 bead Substances 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000005438 electron bubble Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 150000002497 iodine compounds Chemical class 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 231100000989 no adverse effect Toxicity 0.000 description 1
- -1 polyethylene terephthalate Polymers 0.000 description 1
- 239000011241 protective layer Substances 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 229920003002 synthetic resin Polymers 0.000 description 1
- 239000000057 synthetic resin Substances 0.000 description 1
Images




















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/34776—Absolute encoders with analogue or digital scales
- G01D5/34792—Absolute encoders with analogue or digital scales with only digital scales or both digital and incremental scales
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/26—Measuring arrangements characterised by the use of optical techniques for measuring angles or tapers; for testing the alignment of axes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
- G01C15/002—Active optical surveying means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
- G01C15/02—Means for marking measuring points
- G01C15/06—Surveyors' staffs; Movable markers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/3473—Circular or rotary encoders
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/34776—Absolute encoders with analogue or digital scales
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Optical Transform (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
1-1. 角度検出システムの構成
第1の実施の形態に係る角度検出システム90の構成を図1~4を参照しながら説明する。角度検出システム90は、測量システム100に備えられている。測量システム100は、計測モジュール10と測量装置50とを備える。角度検出システム90は、測定対象物である、距離測定器14の角度を測定するシステムであり、計測モジュール10のエンコーダパターン部13と、測量装置50とで構成される。
この場合、回転角測定器の0°に対応する方向と、距離測定器14を支持部材12に組み付けた際の基準方向RDとの、支持部材12の中心軸回りの角度は、距離測定器14を組み付けた際に求められ、補正値として、回転角測定器に設定する。このように、回転角測定器22は、距離測定器14の、エンコーダパターン13Bの基準方向RDに対する支持部材12の中心軸A周りの角度θBを測定可能とする。また、回転角測定器の測定データは、モジュール通信部19に出力可能とする。
図2に示すとおり、測量装置50は、三脚を用いて既知の点に据え付けられており、下方から、整準部、該整準部の上に設けられた基盤部、該基盤部の上を水平回転する托架部2aと、托架部2aの中央で鉛直回転する望遠鏡2bとを有する。
図8は、本実施の形態にかかる測量システム100を用いて、測量装置50から視通のない測定点Pについて測量を実施する場合の、測量装置50および計測モジュール10の動作のフローチャートである。
図9は、角度検出システム90における、角度検出のフローチャートであり、上記ステップS103およびステップS104に対応する処理の一例を示す。ステップS103においてエンコーダパターンの読取りが開始すると、測量装置50では以下の動作を実行する。
次に、測定点座標P(X,Y,Z)の演算方法について説明する。図11(a)は、反射ターゲットの中心Oおよび測量装置50を通る鉛直平面における、反射ターゲット11の中心O、距離測定器14の基点R、および測定点Pの関係を示す図である。
l’=l・cosφ ・・・式1
θ=θT+θB ・・・式2
xo=l’=l・cosφ ・・・式3
yo=l’・sinθ ・・・式4
zo=d+l・sinφ ・・・式5
P(X,Y,Z)=(xp+xo,yp+yo,zp+zo) ・・・式6
図12は、上記実施の形態の1つの変形例に係る、エンコーダパターン部13aの斜視図である。図12に示すように、エンコーダパターン部13a、幅情報部132を備えていない。このように幅情報部132は必須ではなく、幅情報部132を備えなくてもよい。この場合、ステップS303において、角度情報部131の縦線131a,131bの高さh2の半分よりも短い間隔で、水平方向の直線状の読込みを行い、その結果から、エンコーダパターン13Baの左右の境界を検出し、エンコーダパターン13Baの中心を求めるとよい。
2-1. 角度検出システムの構成
図13は、本発明の第2の実施の形態に係る角度検出システム290を備える測量システム200の構成ブロック図である。
測量システム200を用いて、測量装置250から視通のない測定点Pについて測量を実施する場合の動作における、エンコーダパターン13Bの基準方向RDに対する測量装置250の方向角θTの検出において、角度検出システム290は、第1の実施の形態のステップS301~S307に代えて、図15の動作を行う。
図17に示すように、第3の実施の形態に係る角度検出システム390は、第1の実施の形態に係る測量システム100と同一の測量システム300に備えられており、反射ターゲット11を構成要素として含む。測量システム300と測量システム100の機械的構成は同一であるので、機械的構成についての詳細な説明は省略する。
図20は、第4の実施の形態に係る、角度検出システム(図示せず)の、エンコーダパターンの角度情報部431の構成を説明する図である。本実施の形態に係る、角度検出システムの機械構成は、エンコーダパターンの角度情報部431を除き、第1の実施の形態に係る角度検出システム90と同様であるのでその詳細な説明は省略する。

図21は、第5の実施の形態に係る角度検出システム(図示せず)の、エンコーダパターン513Bの角度情報部531の構成を説明する図である。本実施の形態に係る、角度検出システムの機械構成は、角度情報部531を除き、第1の実施の形態に係る角度検出システム90と同様であるので、その詳細な説明は省略する。

14 距離測定器(測定対象物)
13,13a エンコーダパターン部
13A,413A,513A ベース
13B,413B,513B エンコーダパターン
19 モジュール通信部
50, 250 測量装置
55 カメラ(情報取得部)
55C 偏光フィルタ
57 通信部
64,264 演算制御部
69 読取光送光部
70 スキャナ(情報取得部)
71 スキャナの送光部(読取光送光部)
77 偏光フィルタ
90,290,390 角度検出システム
120,420,520 反射材層
130,430,530 エンコーダパターン層
130a,430a,530a 第1の偏光フィルタ
130b,430b,530b 第2の偏光フィルタ
131,431,531 角度情報部
Claims (8)
- 測定対象物に取り付けられるエンコーダパターン部と、
測量装置とを備える角度検出システムであって、
前記エンコーダパターン部は、
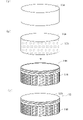
円柱形状のベース、および該ベースの外周側面に設けられて、所定の基準方向に対する周方向の角度を示すエンコーダパターンを備え、
前記エンコーダパターンは、入射した光を再帰反射する反射材層と、該反射材層の前面に配置されたエンコーダパターン層を備え、該エンコーダパターン層は、第1の方向の偏光成分を透過する第1の偏光フィルタと、第1の方向とは異なる第2の方向の偏光成分を透過する第2の偏光フィルタとの組み合わせにより構成され、
前記測量装置は、前記エンコーダパターンに向けて読取光を出射する読取光送光部と、前記エンコーダパターンが示す情報を、光学的に取得する情報取得部と、前記情報に基づいて、前記基準方向に対する前記測量装置の角度(θT)を演算する演算制御部と、前記読取光送光部から出射され、前記エンコーダパターンで反射されて前記情報取得部の受光面に入射する光の光路上に配置された第1のまたは第2の偏光フィルタを備えることを特徴とする角度検出システム。 - 前記角度情報部は、前記第1のおよび第2の偏光フィルタをエンコーダパターン部の外周側面に周方向に配置することによりビットパターンを示し、
前記演算制御部は、光学的に取得した前記情報を前記エンコーダパターンの周方向に読取り、読取り結果をビットパターンに変換し、前記読取りの結果から前記エンコーダパターンの中央位置を特定し、該中央位置を中央とする所定の領域に含まれる前記ビットパターンを、予め設定されたビットパターンと角度との相関と対比することにより、角度を演算することを特徴とする請求項1に記載の角度検出システム。 - 前記角度情報部は、前記第1の偏光フィルタを、広狭2種類の幅の縦線として、M系列により生成されたビットパターンを示すように周方向に配置し、各縦線の間に第2の偏光フィルタを配置したバーコード状のパターンであることを特徴とする請求項1または2に記載の角度検出システム。
- 前記反射材層は、反射率の異なる第1のおよび第2の反射材を周方向に配置することにより構成され、
前記第1のおよび前記第2の偏光フィルタと、前記第1のおよび前記第2の反射材との組み合わせによってビットパターンを示すことを特徴とする請求項1~3のいずれかに記載の角度検出システム。 - 前記情報取得部は、前記エンコーダパターンが示す情報を画像として取得するカメラであることを特徴とする請求項1~4のいずれかに記載の角度検出システム。
- 前記情報取得部は、前記エンコーダパターンが示す情報を、前記エンコーダパターンにスキャン光を送光し、前記エンコーダパターンからの反射光を受光して受光光量分布として取得するスキャナであることを特徴とする請求項1~4のいずれかに記載の角度検出システム。
- 前記測定対象物は、前記基準方向に対して周方向に所定の角度(θB)で取り付けられており、前記演算制御部は、前記所定の角度(θB)および前記エンコーダパターンの読取角(θT)に基づいて、前記測定対象物の前記測量装置に対する角度を演算することを特徴とする請求項1~6のいずれかに記載の角度検出システム。
- 円柱形状のベース、および該ベースの外周側面に配置されて、所定の基準方向に対する周方向の角度を示すエンコーダパターンを備えるエンコーダパターン部と、情報取得部を備える測量装置とを用いて角度を検出する方法であって、
(a)前記エンコーダパターン部を前記測定対象物に、エンコーダパターン部の周方向に所定の角度で取り付ける工程、
(b)前記エンコーダパターンに向けて読取光を出射する工程、
(c)前記情報取得部が、前記エンコーダパターンが示す情報を、光学的に取得する工程および
(d)(c)工程により取得された情報に基づいて、前記測量装置の、前記基準方向に対する方向角を演算し、
前記エンコーダパターンは、入射した光を再帰反射する反射材層と、該反射材層の前面に配置されたエンコーダパターン層を備え、該エンコーダパターン層は、第1の方向の偏光成分を透過する第1の偏光フィルタと、第1の方向とは異なる第2の方向の偏光成分を透過する第2の偏光フィルタとの組み合わせにより構成され、
前記測量装置は、前記読取光送光部から出射され、前記エンコーダパターンで反射されて前記情報取得部に入射する光の光路上に配置された第1のまたは第2の偏光フィルタを備えることを特徴とする角度検出方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018144786A JP7080129B2 (ja) | 2018-08-01 | 2018-08-01 | 角度検出システムおよび角度検出方法 |
| EP19844618.9A EP3832258A4 (en) | 2018-08-01 | 2019-07-26 | ANGLE DETECTION SYSTEM AND ANGLE DETECTION METHOD |
| PCT/JP2019/029426 WO2020026980A1 (ja) | 2018-08-01 | 2019-07-26 | 角度検出システムおよび角度検出方法 |
| CN201980046329.2A CN112384754B (zh) | 2018-08-01 | 2019-07-26 | 角度检测系统以及角度检测方法 |
| US17/262,168 US20210270602A1 (en) | 2018-08-01 | 2019-07-26 | Angle detection system and angle detection method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018144786A JP7080129B2 (ja) | 2018-08-01 | 2018-08-01 | 角度検出システムおよび角度検出方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020020673A JP2020020673A (ja) | 2020-02-06 |
| JP2020020673A5 JP2020020673A5 (ja) | 2021-07-26 |
| JP7080129B2 true JP7080129B2 (ja) | 2022-06-03 |
Family
ID=69232511
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018144786A Active JP7080129B2 (ja) | 2018-08-01 | 2018-08-01 | 角度検出システムおよび角度検出方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20210270602A1 (ja) |
| EP (1) | EP3832258A4 (ja) |
| JP (1) | JP7080129B2 (ja) |
| CN (1) | CN112384754B (ja) |
| WO (1) | WO2020026980A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20090024325A1 (en) | 2007-07-19 | 2009-01-22 | Scherzinger Bruno M | AINS enhanced survey instrument |
| US20160178406A1 (en) | 2013-09-10 | 2016-06-23 | Yong Wang | Optical measurement system, method and scaleplate therefor |
| JP2016145791A (ja) | 2015-01-28 | 2016-08-12 | 株式会社トプコン | 三次元位置計測システム |
| JP2019020209A (ja) | 2017-07-14 | 2019-02-07 | 株式会社トプコン | 測量システム |
| JP2019105515A (ja) | 2017-12-12 | 2019-06-27 | 株式会社トプコン | ターゲット装置、測量方法、測量装置およびプログラム |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6080707A (ja) * | 1983-10-07 | 1985-05-08 | Toshihiro Tsumura | 傾斜角度計測装置 |
| JP3184939B2 (ja) | 1991-12-26 | 2001-07-09 | 株式会社ソキア | アブソリュートエンコーダ |
| JPH07139942A (ja) * | 1993-11-12 | 1995-06-02 | Wacom Co Ltd | 測量装置 |
| JP3575894B2 (ja) * | 1995-12-11 | 2004-10-13 | 三菱プレシジョン株式会社 | 相対角度検出装置及び仮想現実感提供装置 |
| JP6369042B2 (ja) * | 2013-11-05 | 2018-08-08 | 日本精工株式会社 | 光学式エンコーダユニット及び光学式エンコーダ |
| JP6449584B2 (ja) * | 2014-08-04 | 2019-01-09 | 株式会社トプコン | 角度検出装置、測量装置 |
| JP6438311B2 (ja) | 2015-01-27 | 2018-12-12 | 株式会社トプコン | 測量システム、測量方法、測量機及び測量用反射ターゲット |
| JP2016146791A (ja) * | 2015-02-13 | 2016-08-18 | みのる産業株式会社 | 土の混合撹拌装置 |
| JP7275439B2 (ja) * | 2018-09-28 | 2023-05-18 | 株式会社トプコン | 測量システム、スキャナ装置、および測量方法 |
| JP7139942B2 (ja) * | 2018-12-27 | 2022-09-21 | 三菱電機株式会社 | 給湯装置 |
-
2018
- 2018-08-01 JP JP2018144786A patent/JP7080129B2/ja active Active
-
2019
- 2019-07-26 US US17/262,168 patent/US20210270602A1/en not_active Abandoned
- 2019-07-26 EP EP19844618.9A patent/EP3832258A4/en not_active Withdrawn
- 2019-07-26 WO PCT/JP2019/029426 patent/WO2020026980A1/ja unknown
- 2019-07-26 CN CN201980046329.2A patent/CN112384754B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20090024325A1 (en) | 2007-07-19 | 2009-01-22 | Scherzinger Bruno M | AINS enhanced survey instrument |
| US20160178406A1 (en) | 2013-09-10 | 2016-06-23 | Yong Wang | Optical measurement system, method and scaleplate therefor |
| JP2016145791A (ja) | 2015-01-28 | 2016-08-12 | 株式会社トプコン | 三次元位置計測システム |
| JP2019020209A (ja) | 2017-07-14 | 2019-02-07 | 株式会社トプコン | 測量システム |
| JP2019105515A (ja) | 2017-12-12 | 2019-06-27 | 株式会社トプコン | ターゲット装置、測量方法、測量装置およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20210270602A1 (en) | 2021-09-02 |
| EP3832258A1 (en) | 2021-06-09 |
| CN112384754A (zh) | 2021-02-19 |
| WO2020026980A1 (ja) | 2020-02-06 |
| EP3832258A4 (en) | 2022-04-13 |
| JP2020020673A (ja) | 2020-02-06 |
| CN112384754B (zh) | 2023-11-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10921430B2 (en) | Surveying system | |
| JP6963936B2 (ja) | 測量システム | |
| JP6877946B2 (ja) | レーザスキャナ | |
| EP3407013B1 (en) | Surveying instrument and three-dimensional camera | |
| US10895632B2 (en) | Surveying system | |
| US11536568B2 (en) | Target instrument and surveying system | |
| JP7066322B2 (ja) | 測量システム | |
| JP4228132B2 (ja) | 位置測定装置 | |
| US11004250B2 (en) | Point cloud data display system | |
| JP2018173346A (ja) | レーザスキャナ | |
| JP7118845B2 (ja) | 角度検出システム | |
| JP6899737B2 (ja) | 測量システム | |
| JP7085888B2 (ja) | 測量システム | |
| JP2020076624A (ja) | ターゲット装置及び測定システム | |
| JP7080129B2 (ja) | 角度検出システムおよび角度検出方法 | |
| JP7078486B2 (ja) | 角度検出システムおよび角度検出方法 | |
| JP7139184B2 (ja) | 測量システム、計測モジュール、および測量方法 | |
| EP4063787A1 (en) | Surveying system | |
| JP6913422B2 (ja) | 測量システム | |
| JP2020020673A5 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210519 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210519 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220523 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220524 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7080129 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |