WO2015060179A1 - ダンプトラックの運行管理システム - Google Patents
ダンプトラックの運行管理システム Download PDFInfo
- Publication number
- WO2015060179A1 WO2015060179A1 PCT/JP2014/077495 JP2014077495W WO2015060179A1 WO 2015060179 A1 WO2015060179 A1 WO 2015060179A1 JP 2014077495 W JP2014077495 W JP 2014077495W WO 2015060179 A1 WO2015060179 A1 WO 2015060179A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- map data
- dump
- mine
- vehicle
- dump truck
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images























Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
- G05D1/0291—Fleet control
- G05D1/0297—Fleet control by controlling means in a control room
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3807—Creation or updating of map data characterised by the type of data
- G01C21/3815—Road data
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Information and communication technology [ICT] specially adapted for implementation of business processes of specific business sectors, e.g. utilities or tourism
- G06Q50/02—Agriculture; Fishing; Forestry; Mining
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Information and communication technology [ICT] specially adapted for implementation of business processes of specific business sectors, e.g. utilities or tourism
- G06Q50/40—Business processes related to the transportation industry
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/123—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams
- G08G1/133—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams within the vehicle ; Indicators inside the vehicles or at stops
- G08G1/137—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams within the vehicle ; Indicators inside the vehicles or at stops the indicator being in the form of a map
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/20—Monitoring the location of vehicles belonging to a group, e.g. fleet of vehicles, countable or determined number of vehicles
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/003—Maps
- G09B29/006—Representation of non-cartographic information on maps, e.g. population distribution, wind direction, radiation levels, air and sea routes
- G09B29/007—Representation of non-cartographic information on maps, e.g. population distribution, wind direction, radiation levels, air and sea routes using computer methods
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/10—Map spot or coordinate position indicators; Map reading aids
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
Definitions
- the present invention relates to a dump truck operation management system.
- the dump truck operation management system manages the operation of the dump truck based on the map data obtained by converting the map of the road on which the dump truck can travel.
- the dump truck operation management system is based on own vehicle position information obtained by a positioning device such as a GPS receiver mounted on the dump truck and map data obtained by converting a map of a road on which the dump truck can run into data.
- a positioning device such as a GPS receiver mounted on the dump truck
- map data obtained by converting a map of a road on which the dump truck can run into data.
- the map data used in the operation management system may include road shape information serving as a target trajectory during travel, speed limit information provided as a target speed during travel, and the like.
- Some autonomous traveling systems use these road shape information and speed limit information and own vehicle position information measured by a positioning device to follow the vehicle (US Patent Application Publication No. 2004/0122576). Specification).
- the map data over the entire mine site is centrally managed by the computer in the control center. Therefore, when updating the map data, including the case where the mine site consists of multiple mining sites, stop the operation of all dump trucks in the mine site, and then obtain the map data for the control center and each dump truck. It was necessary to renew, and there was concern about a decline in mine operation efficiency.
- An object of the present invention is to provide a dump truck operation management system that does not require the operation of all dump trucks under management to be stopped every time map data is updated.
- the present invention provides a storage device storing map data indicating a road map on which a dump truck can travel, a plurality of dump trucks that travel based on the map data, When some of the map data is not included in one or more predetermined closed areas set in advance on the road map, or when the part of the map data is the one or more The map data is allowed to be updated when none of the plurality of dump trucks exists in any of the one or more closed areas. And a configured control device. Thereby, since map data can be updated without stopping operation of all dump trucks, work efficiency by the dump truck can be improved.
- a mine dump autonomous traveling system which is one of dump truck operation management systems
- when updating map data used for autonomous traveling by a mine dump instead of stopping all mine dumps, the operation of the mine dumps that do not travel through the renewal section is continued so that the map update will not affect the operation of the mine dumps as much as possible.
- an area in a mine site that has one or more loading and unloading sites connected to each other by a mine dump transport path (road) is defined as a “mine area (mine)”.
- the mine site is appropriately divided into a plurality of mining areas.
- map data is managed for each block area, and the map data is updated when there is no mine dump in the block area where the map data update location is included. Yes.
- a mine site composed of a plurality of mining areas is managed by one control center.
- the mining area in the first embodiment will be described.
- the mine sites are managed by dividing into mining area areas such as mining area A area 400, mining area B area 430, and mining area C area 460.
- a plurality of mine dumps placed under the control of the control center 490 repeatedly perform loading work, transport work, and earthing work in the mine area assigned to each.
- loading sites 404, 408, 412 and loading sites 404, 408 in which loading work to the mining dumps 420, 422 by the mining excavators 402, 406, 410, which are ultra-large hydraulic excavators, are performed.
- 412 are dumping grounds 414, 416, and 418 for unloading loads (sediment and minerals), which are connected to each other by a conveyance path (road) on which the mine dumps 420 and 422 can travel.
- the mining area A area 400 is connected to the control center 490 via a conveyance path, and further via the control center 490 to the mining area B area 430 and the mining area C area 460 via a conveyance path.
- the mine excavator 402 is arranged at the loading place 404, and loads earth and sand and minerals into the mine dump.
- the mine excavator 406 is disposed in the loading field 408, and loads earth and sand and minerals into the mine dump.
- the mine excavator 410 is disposed in the loading field 412, and loads earth and sand and minerals into the mine dump.
- the mine dump 420 and the mine dump 422 are loaded into the loading field 404, loading field 408, loading field 412, unloading field 414, unloading field 416, and unloading field 418 in the mining area A area 400 via a conveyance path. Go back and forth between and transport sediments and minerals.
- the loading sites 434, 438, 442 where the mining excavators 432, 436, 440 are loaded into the mining dumps 450, 452 and the loads loaded at the loading sites 434, 438, 442 are loaded.
- the mining area B area 430 is connected to the control center 490 via a conveyance path, and further connected via the control center 490 to the mining area A area 400 and the mining area C area 460 via a conveyance path.
- the mine excavator 432 is arranged at the loading place 434 and loads earth and sand and minerals into the mine dump.
- the mine excavator 436 is disposed in the loading field 438 and loads earth and sand and minerals into the mine dump.
- the mine excavator 440 is disposed in the loading field 442, and loads earth and sand and minerals into the mine dump.
- the mine dump 450 and the mine dump 452 are loaded via a conveyance path into a loading field 434, loading field 438, loading field 442, earthing field 444, earthing field 446 and earthing field 448 in the mining area B area 430. Go back and forth between and transport sediments and minerals.
- the mining area C area 460 loading sites 464, 468, 472 where the mining excavators 462, 466, 470 are loaded into the mining dumps 480, 482 and loads loaded at the loading sites 464, 468, 472 are loaded.
- the mining area C area 460 is connected to the control center 490 via a conveyance path, and further connected via the control center 490 to the mining area A area 400 and the mining area B area 430 via a conveyance path.
- the mine excavator 462 is arranged in the loading place 464, and loads earth and sand and minerals into the mine dump.
- the mine excavator 466 is disposed in the loading field 468 and loads earth and sand and minerals into the mine dump.
- the mine excavator 470 is disposed in the loading field 472, and loads earth and sand and minerals into the mine dump.
- the mine dump 480, the mine dump 482, and the mine dump 484 are loaded via a conveyance path into the loading field 464, loading field 468, loading field 472, earthing field 474, earthing field 476 and the like in the block C area 460. Go back and forth between earthmoving places 478 and transport earth and sand and minerals.
- Each mining dump has a pre-determined mining area, and each mining dump is transported between earth and sand and minerals by repeatedly moving between loading and unloading sites within the same mining area. It is carried out. That is, a mine dump truck traveling in one mining area basically does not travel in other mining area. And each mine dump may move to the control center 490 for refueling, operator shift change of the mine dump (dump traveling), movement to the parking lot due to the end of work, maintenance, and the like.
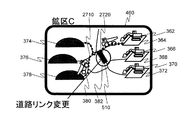
- the control center system 100 (see FIG. 4 to be described later) installed in the control center 490 is, for example, in the master map data managed by the control center system 100 in the mining area C area 460.
- a part of the map data (road link (details will be described later))
- FIG. 2 when there are mine dumps 380, 382, and 384 in the mining area C area 460 including the road link (road link 510) to be changed, master map data of the control center system 100 Will not be updated.
- FIG. 2 shows that there are mine dumps 380, 382, and 384 in the mining area C area 460 including the road link (road link 510) to be changed.
- the master map data is updated.
- the map data (vehicle map data) managed by each mine dump is updated.
- the map data is updated without stopping the operation of the mine dumps 420, 422, 450, 452 in the mining area other than the mining area C area 460 (the mining area A area 400 and the mining area B area 430). It can be carried out.
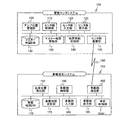
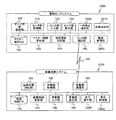
- FIG. 4 shows a system configuration diagram in the first embodiment.
- the dump truck operation management system shown in this figure is installed in the control center system 100 installed in the control center 490 and in each mine dump 420, 422, 450, 452, 380, 382, 384 in the mine site.
- the terminal system 150 is configured.
- the control center system 100 and the in-vehicle terminal system 150 are connected by a wireless communication network 190 to exchange information. Note that since there are a plurality of in-vehicle terminal systems 150 in each mine dump, there are actually a plurality of in-vehicle terminal systems 150, but only one is shown in FIG.
- the control center system 100 is a control device configured by a computer, and a dump position management unit 105 that manages the own vehicle position of the mine dump transmitted from each in-vehicle terminal system 150, and the mine dump can travel at the mine site.
- a map data indicating a road map a master map DB (for example, a magnetic storage device) 130 for storing and managing master map data provided to each in-vehicle terminal system 150, and a master map managed by the master map DB
- a master map update unit 135 that updates data
- a map update determination unit 140 that determines whether or not the master map data can be updated based on the position of the map data related to the update and the position of each mine dump, and each in-vehicle terminal system 150
- Center-side communication unit that performs communication via a communication network such as a wireless LAN (for example, wireless communication) 145), a center side input unit (for example, mouse, keyboard) 120 for an operator in the control center 490 to perform an input operation when updating the master map
- the in-vehicle terminal system 150 is a control device configured by a computer, and includes a vehicle position measuring unit 155 that measures the position of the vehicle of the mine dump using a GPS, an acceleration sensor, a gyroscope, a speed sensor, and the like, and a control center system 100.
- Vehicle map DB (for example, a magnetic storage device) 170 that stores a master map provided from the master map DB 130 as vehicle map data, and a vehicle map update unit that updates vehicle map data managed by the vehicle map DB 170 175, an on-vehicle side communication unit (for example, a wireless communication device) 165 that communicates with the control center system 100 via a communication network such as a wireless LAN, and an on-vehicle side input unit (for example, a keyboard) on which an operator performs an input operation 180, a vehicle-mounted display unit (for example, a liquid crystal monitor) 185 for displaying information to the operator, A vehicle-side control unit 160 that performs overall processing control of the mounting terminal system 150, the acceleration of the mine dumps, deceleration, and a vehicle control unit 2080 that performs vehicle control, such as stopping.
- an on-vehicle side communication unit for example, a wireless communication device
- an on-vehicle side input unit for example, a keyboard
- the vehicle control unit 2080 is autonomous based on the instruction given from the control center system 100, the own vehicle position measured by the own vehicle position positioning unit 155, and the in-vehicle map data managed by the in-vehicle map DB 170. Autonomous traveling control is performed to steer the vehicle and accelerate / decelerate the vehicle.
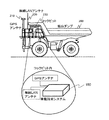
- the mine dump 200 shown in FIG. 5 includes a GPS antenna 210 that receives navigation signals from a plurality of GPS satellites (navigation satellites) and outputs the navigation signals to the vehicle positioning unit 155, and an electric power output from the control center 490 or the like.
- a wireless LAN antenna 220 that receives a signal and outputs it to the in-vehicle communication unit 165 is mounted, and an in-vehicle terminal system 150 is mounted in the cockpit 230.
- a control center system 100 is installed in the control center 490, and an operator 310 operates the control center system 100.
- Information is presented to the operator 310 using the screen 320 of the control center system 100.
- the operator 310 uses the control center system 100, the operator 310 performs a master map editing operation or issues a master map update command.
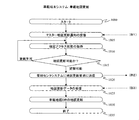
- step 900 in FIG. 7 the control center system 100 performs an initial setting process for receiving a process start request from the user and confirming the activation state of the control center system 100.
- the process start request from the user is made via the center side input unit 120. If there is a process start request, the process proceeds to step 905.
- step 905 a request for correction, addition, or deletion of information related to the shape, speed limit, gradient, curvature, and road resistance related to a part of the master map (road link) managed in the master map DB 130 (hereinafter referred to as “master map”). From the center side input unit 120.
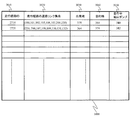
- FIG. 9 to 14 The tables shown in FIGS. 9 to 14 are stored in the master map DB 130 and indicate roads (conveyance paths) on which mine dumps can travel.
- a road related to master map data is defined by a combination of a plurality of small sections, and each of the small sections is referred to as a road link.
- a road link As a reference for dividing a road with a road link, there are, for example, an intersection to which another road is connected, and an attribute such as a road speed limit (sometimes referred to as a “road link attribute”), and two intersections are connected.
- a road having the same road or road link attribute may become one road link.
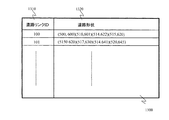
- FIG. 9 shows a road shape management table 1300 for managing the shape of the road link (road shape) in the mine site.
- the road shape is defined by the coordinates of two or more nodes constituting each road link.
- the road shape management table 1300 manages the road link ID 1310 individually assigned to each road link and the road shape (contact coordinate coordinates) 1320 of the road link having the road link ID 1310 in association with each other.
- the coordinate system for expressing the road shape 1320 may be latitude / longitude or a unique coordinate system set in the mine.
- FIG. 9 shows an example using a coordinate system that is uniquely set in the mine and expresses coordinates in latitude and longitude directions as integers.
- FIG. 10 is a diagram showing a mining area management table 1400 for managing which mining area includes a road link in the mine site.
- the mining area management table 1400 manages the road link ID 1410 of each road link and the mining area information 1420 indicating the mining area to which the road link related to the road link ID 1410 belongs. By using the mining area management table 1400, the mining area to which the road link belongs can be searched from the ID of the road link.
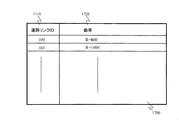
- FIG. 11 is a diagram showing a speed limit management table 1500 that manages the speed limit of road links in the mine site.
- the speed limit management table 1500 manages the road link ID 1510 of each road link and the speed limit information 1520 of the road link related to the road link ID 1510.
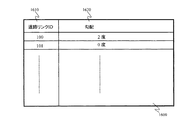
- FIG. 12 is a diagram showing a gradient management table 1600 for managing the gradient of the road link in the mine site.
- the gradient management table 1600 manages the road link ID 1610 of each road link and the road link gradient information 1620 related to the road link ID 1610.
- FIG. 13 is a diagram showing a curvature management table 1700 for managing the curvature of road links in the mine site.
- the curvature management table 1700 manages the road link ID 1710 of each road link and the curvature information 1720 of the road link related to the road link ID 1710.
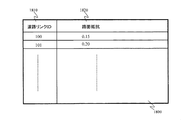
- FIG. 14 is a diagram showing a road surface resistance management table 1800 for managing the road surface resistance of road links in the mine site.
- the road surface resistance management table 1800 manages the road link ID 1810 of each road link and the road surface resistance information 1820 of the road link related to the road link ID 1810.
- the road surface resistance information 1820 may use a ⁇ value, or may be expressed by classifying the degree of slipperiness into a plurality of stages according to the road surface state (for example, DRY, WET).
- FIG. 14 shows an example in which the road surface resistance is expressed using ⁇ values.
- the master map DB 130 manages at least the road shape management table 1300, the mining area management table 1400, the speed limit management table 1500, the gradient management table 1600, the curvature management table 1700, and the road surface resistance management table 1800.
- a master map update request at least one of the road shape, mining area information, speed limit, gradient, curvature, and road resistance of one or more road links is updated, or one or more road links are added or deleted. To do.
- step 910 the map update determination unit 140 performs processing for confirming the position of each mine dump in operation within the mine.
- this position confirmation process the positions of all mine dumps in operation registered in the mine dump position management table 1200 (see FIG. 15) managed by the dump position management unit 105 are acquired, and the process proceeds to step 915.
- FIG. 15 shows a mine dump position management table.
- the mine dump position management table 1200 manages the mine dump ID 1210 assigned to each mine dump, the position 1220 of the mine dump according to the ID 1210, and the positioning time 1230 that is the time when the position 1220 is measured.
- the mine dump ID 1210 is a number uniquely assigned to each mine dump such as 320 and 350, for example.
- the position 1220 may be expressed in a coordinate system based on latitude and longitude, or may be expressed in a coordinate system uniquely used in the mine.
- FIG. 15 shows an example using a coordinate system that is uniquely set in the mine and expresses coordinates in latitude and longitude directions as integers.
- the positioning time is a time at which the vehicle position measuring unit 155 measures the vehicle position based on navigation signals received from a plurality of GPS satellites.
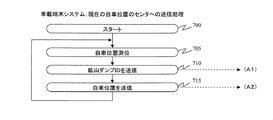
- FIG. 16 shows a processing flow for transmitting the vehicle position to the control center 490 by the in-vehicle terminal system 150
- FIG. 17 shows a registration processing flow for the current location of each mine dump by the control center system 100.
- step 700 the in-vehicle terminal system 150 performs an initial setting process for receiving a process start request from the user, checking whether or not the engine of the mine dump is on.
- the process start request from the user is made via the terminal side input unit 180. If there is a process start request, the process proceeds to step 705.
- step 705 the in-vehicle terminal system 150 measures the position of the mine dump (vehicle position) on which the vehicle-mounted terminal system 150 is mounted in the vehicle position measuring unit 155, and proceeds to step 710.
- step 710 the in-vehicle terminal system 150 transmits the mine dump ID of the mine dump in which the in-vehicle terminal system 150 is mounted to the center side communication unit 145 in the control center system 100 via the wireless communication network 190. Send via.
- step 715 the vehicle-mounted terminal system 150 uses the vehicle-side communication unit 165 to determine the vehicle position determined in step 705 and the time (1230) when the vehicle position is measured, in the center-side communication unit 145 of the control center system 100. Is transmitted via the wireless communication network 190, and the process returns to Step 705.
- step 800 a process start request is received from the user and an initial setting process for confirming the activation state of the control center system is performed.
- the process start request from the user is made via the center side input unit 120. If there is a process start request, the process proceeds to step 805.
- Step 805 the center side communication unit 145 receives the mine dump ID transmitted from the in-vehicle terminal system 150.
- the center side communication unit 145 displays the own vehicle position information of the mine dumper related to the mine dump ID received in step 805 and the time when the own vehicle position is measured among the information transmitted from each in-vehicle terminal system 150. Receive at.
- step 815 the mine dump position management unit 105 registers the own vehicle position information and positioning time received in step 810 in the mine dump position management table 1200 in association with the mine dump ID.
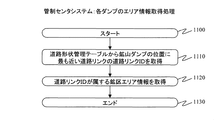
- step 915 based on the position of each mine dump in the mine site acquired in step 910, an information (area information) acquisition process indicating which mine dump is located is performed. Go to step 920. Here, the acquisition process of the area information of each mine dump in step 915 will be described.
- FIG. 18 is a processing flow relating to area information acquisition processing for each mine dump.
- step 1100 an initial setting process is performed to check whether or not a process start request is received from the user, whether or not the mine dump engine is in an ON state, and the like.
- the process start request from the user is made via the terminal side input unit 180. If there is a process start request, the process proceeds to step 1110.
- step 1110 the control center system 100 acquires the road link ID of the road link closest to the position of each mine dump acquired in step 910 from the road shape management table 1300 in the map update determination unit 140.
- the road link ID relating to the road link closest to each mine dump is obtained by comparing the position of each mine dump obtained in step 910 with the coordinates of the road shape 1320 in the road shape management table 1300.
- step 1120 the map update discriminating unit 140 acquires the mining area to which the road link ID obtained in step 1110 belongs based on the mining area management table 1400.
- the road link ID acquired in step 1110 is searched from the road link ID 1410 registered in the block area management table 1400, and the block area information 1420 related to the searched road link ID is acquired.
- step 1130 end processing related to area information acquisition processing of the vehicle position is performed, and the process proceeds to step 920.
- step 920 the control center system 100 acquires, in the map update determination unit 140, the mining area (area information) to which the road link requested for the master map update in step 905 belongs.
- the road link ID of the road link for which the master map update request has been made in step 905 is searched from the area area management table 1400, and the road link ID.
- the mining area information 1420 relating to is acquired as area information.
- step 925 the control center system 100 compares the area information of each mine dump acquired in step 915 with the area information with the master map update request acquired in step 920 in the map update determination unit 140, and updates the master map. Determine if there is a mine dump in operation in the requested mining area. If there is a mine dump in operation in the mining area where there is a master map update request, update by the master map update request is prohibited and the process proceeds to step 930. On the other hand, if there is no mine dump in operation in the mining area where there is a master map update request, the update by the master map update request is permitted and the process proceeds to step 935.
- step 930 the control center system 100 indicates that the master map cannot be updated because there is a mine dump in operation in the mining area where the master map update is requested via the center side display unit 125. Make a notification.
- FIG. 19 shows a notification screen 1900 displayed on the center side display unit 125 in step 930.
- the notification screen 1900 is a screen for notifying that the master map cannot be updated. “There is a mine dump in dredging in the mining area where there is a request for master map update. The master map cannot be updated. ] And a confirmation button 1920 for inputting that the confirmation of the message by the operator has been completed. As described above, the operator is notified through the notification screen 1900 that the master map cannot be updated that the master map cannot be updated because there is a mine dump in operation in the mining area where the master map is desired to be updated.
- step 935 the control center system 100 updates the master map data in the master map DB 130 to reflect the master map update request received in step 905 in the master map update unit 135, and proceeds to step 940.
- step 940 the center side communication unit 145 transmits a master map update notification to the in-vehicle side communication unit 165 of the in-vehicle terminal system 150, and the process proceeds to step 945.
- step 945 the center side communication unit 145 receives the map update request transmitted from the in-vehicle side communication unit 165 of the in-vehicle terminal system 150, and proceeds to step 950.
- step 950 the master map update unit 135 acquires map update data for updating the in-vehicle map data in the in-vehicle map DB 170 in the in-vehicle terminal system 150 to the master map data updated in step 935 from the master map DB 130, Proceed to step 955.
- Step 955 the map update data acquired in Step 950 is transmitted from the center side communication unit 145 to the in-vehicle side communication unit 165 of the in-vehicle terminal system 150, and the process proceeds to Step 960.
- Step 960 the control center system 100 performs a master map update end process.
- information for example, a message or a graphic
- the end process information (for example, a message or a graphic) indicating the end of the master map process is displayed on the center side display unit 125.
- step 1000 the in-vehicle terminal system 150 performs initial setting processing for receiving a processing start request from a user, checking whether or not the mine dump engine is in an ON state, and the like.
- the process start request from the user is made via the terminal side input unit 180. If there is a process start request, the process proceeds to step 1005.
- step 1005 the in-vehicle terminal system 150 receives the master map update notification transmitted from the center side communication unit 145 in step 940 in the in-vehicle side communication unit 165, and proceeds to step 1010.
- step 1010 in order to determine whether or not the in-vehicle terminal system 150 can update the map data in the in-vehicle terminal system 150, the access state (map access) from other parts to the in-vehicle map DB 170 in the in-vehicle map DB 170 is determined. Status) is acquired, and the process proceeds to Step 1015.
- step 1015 when it is determined that there is no map data access based on the map access state acquired in step 1010 (that is, when it is determined that the map can be updated), the process proceeds to step 1020.
- the state where the map can be updated is, for example, a state where the mine dump arrives at the destination and stops, or a state where the mine dump stops and waits for the next work instruction This indicates that there is no external access to the map data for a certain period of time.
- step 1020 the vehicle-mounted side communication unit 165 transmits a map update notification to the center side communication unit 145.
- the in-vehicle side communication unit 165 receives the map update data from the center side communication unit 145 and proceeds to step 1030.
- step 1030 the in-vehicle map update unit 175 updates the in-vehicle map data in the in-vehicle map DB 170 using the map update data received in step 1025, and the process proceeds to step 1035.
- step 1035 the in-vehicle map system 150 finishes the in-vehicle map update.
- the “mine block” which is one or more closed areas in the mine. If there is no mine dump in the mining area that includes the road link related to the map update request, the map data update based on the map update request is permitted. By doing so, the master map data and the in-vehicle map data can be updated without stopping the operation of all the mine dumps under the control of the control center, so that the work efficiency by the mine dump can be improved.
- the map data is managed in units of the mining area as in the first embodiment. However, if there is a mine dump in the mining area where the updated location of the map data is included, the mine After outputting the stop command to the dump and stopping only the mine dump, update the master map data and the in-vehicle map data, and when the update of these map data is completed, output the departure command to the stopped mine dump. Restarting.
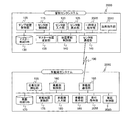
- FIG. 2000 a system configuration diagram in the second embodiment is shown in FIG.
- the map update of the temporary stop command unit 2005 for issuing a temporary stop command to the mine dump and the in-vehicle terminal system 2050 to the control center system 100 of the first embodiment is performed.
- a departure instruction unit 2010 for adding a new departure instruction to the mine dump is added.
- the in-vehicle terminal system 2050 receives the temporary stop command or departure command from the control center system 2000 and sends the temporary stop command or departure command to the in-vehicle terminal system 150 of the first embodiment.
- a travel command unit 2055 is added.
- steps 900 to 920 are the same as the map update processing flow of the control center system 100 in the first embodiment.
- step 2105 the control center system 2000 compares the area information of each mine dump acquired in step 920 with the area information with the master map update request acquired in step 920 in the map update determination unit 140, It is determined whether or not there is a mine dump in operation in a mining area where a map update request is made. If there is a mine dump in operation in the mining area where there is a master map update request, the process proceeds to step 2110. On the other hand, if there is no mine dump in operation in the mining area where there is a master map update request, the master map update request is permitted and the process proceeds to step 935.
- step 2110 the control center system 2000 uses the temporary stop command unit 2005 to send the mine dump via the center side communication unit 145 to the in-vehicle side communication unit 165 of the mine dump existing in the mining area where the master map update request is made. A temporary stop command is transmitted, and the process proceeds to Step 2115.
- step 2115 the control center system 2000 receives the mine dump temporary stop completion notification transmitted from the in-vehicle side communication unit 165 of the mine dump existing in the mining area where the master map update request is made in the center side communication unit 145, Proceed to step 2120.
- step 2120 the control center system 2000 notifies the operator through the center side display unit 125 that the suspension of all the mine dumps that have been traveling in the mining area where the master map update request has been made is completed, Proceed to step 935.
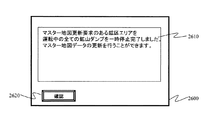
- FIG. 23 shows an example of a notification screen 2600 displayed on the center side display unit 125 in step 2120.
- the notification screen 2600 shown in this figure is a screen for notifying that the suspension of the mine dump has been completed, and “the mine dump in operation of the mining area where the master map update request has been completed has been suspended. You can update the master map data. ”And a confirmation button 2620 for inputting that the confirmation of the message by the operator has been completed.
- This notification screen 2600 notifies the operator that all the mine dumps in the mining area where the master map data is to be updated have been temporarily stopped.
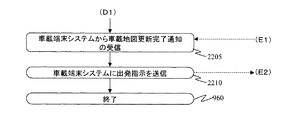
- step 955 the control center system 2000 sends an in-vehicle map update completion notification transmitted from the in-vehicle side communication unit 165 of the mine dump existing in the mining area related to the master map update request in step 2205 (see FIG. 22).
- the data is received via the center side communication unit 145, and the process proceeds to Step 2210.
- the departure instruction unit 2010 determines whether or not the update of the in-vehicle map data in the in-vehicle map DB 170 in all mine dumps existing in the mining area related to the master map update request is completed, and When the update of the in-vehicle map data is completed, a departure command for resuming traveling is transmitted to the in-vehicle side communication unit 165 of each mine dump via the center side communication unit 145. Finally, in step 960, end processing is performed in the same manner as the map update processing flow of the control center system in the first embodiment.
- steps 1000 to 1030 are the same as the map update process flow of the in-vehicle terminal system 150 in the first embodiment, and thus the description thereof is omitted.
- step 1030 ends, the vehicle-mounted side communication unit 165 of each vehicle-mounted terminal system 2050 notifies the center-side communication unit 145 of the control center system 2000 that the update of the vehicle-mounted map data has been completed in step 2305. Send map update completion notification.
- step 1035 an end process similar to the map update process flow of the in-vehicle terminal system in the first embodiment is performed.
- step 2400 the in-vehicle terminal system 2050 performs initial setting processing for confirming whether or not the processing start request is received from the user and whether or not the engine of the mine dump is on.
- the process start request from the user is made via the terminal side input unit 180. If there is a process start request, the process proceeds to step 2405.
- Step 2405 the in-vehicle terminal system 2050 receives the mine dump temporary stop command output from the center side communication unit 145 in Step 2110 (see FIG. 21) by the in-vehicle side communication unit 165.
- the travel command unit 2055 outputs a temporary stop command to the vehicle control unit 208 to stop the mine dump 200.
- Step 2415 the in-vehicle terminal system 2050 transmits a mine dump temporary stop completion notification from the in-vehicle side communication unit 165 to the center side communication unit 145.
- step 2420 the end processing of the mine dump temporary stop in the in-vehicle terminal system 2050 is performed.
- step 2500 the in-vehicle terminal system 2050 performs an initial setting process for receiving a process start request from the user and confirming whether or not the engine of the mine dump is on.
- the process start request from the user is made via the terminal side input unit 180. If there is a process start request, the process proceeds to step 2505.
- Step 2505 the in-vehicle terminal system 2050 receives the departure instruction of the mine dump output from the center side communication unit 145 in Step 2210 (see FIG. 22) by the in-vehicle side communication unit 165.
- the travel command unit 2055 outputs a departure command instructing the vehicle control unit 2080 to start travel, and the travel of the mine dump 200 is resumed.
- the vehicle-mounted terminal system 2050 performs the completion
- map data is managed in units of mine dump travel routes (routes from the starting point to the destination set for each mine dump), and map data is updated in any mine dump travel route. Map data is updated when the location is not included.
- each mine dump is managed by a vehicle allocation management unit 2805 (described later) of the control center system 2800.
- a vehicle allocation management unit 2805 (described later) of the control center system 2800.
- roads that connect any one of the loading yards and release grounds in the mining area to which each mine dump belongs are set as traveling routes, and each mine dump is a loading point set at both ends of its own traveling route. And run repeatedly.
- the next destination may be set again, so that the travel route may be changed every time.
- the mine dumper 380 has a road connecting the discharging ground 378 to the loading site 364 as a travel route 2710, and the mine dumping 382 is a road connecting the loading site 364 to the discharging ground 374.
- a travel route 2720 is used.
- the map data related to the road link 510 is to be changed, the road links 510 are included in the travel routes 2710 and 2720 of all the mine dump trucks 380 and 382 traveling in the mining area C area. Absent. Therefore, the map data related to the road link 510 can be updated without stopping all the mine dumpers 380 and 382.
- a system configuration diagram in the third embodiment is shown in FIG.
- a vehicle allocation management unit 2805 for managing the travel route of each mine dump is added to the control center system 100 of the first embodiment.
- This vehicle allocation management unit 2805 completes a series of mine dump transportation operations such as moving from a loading site to a dumping site and releasing it, or moving from a dumping site to a loading site and loading. Every time a new destination and a new travel route can be set, a mine dumping plan is planned for efficiently transporting minerals and sediment in the mine.
- the structure of the vehicle-mounted terminal system in 3rd Embodiment is the same as the vehicle-mounted terminal system of 1st Embodiment, description is abbreviate
- omitted since the structure of the vehicle-mounted terminal system in 3rd Embodiment is the same as the vehicle-mounted terminal system of 1st Embodiment, description is abbreviate
- steps 900 to 905 are the same as the map update processing flow of the control center system in the first embodiment, and thus description thereof is omitted.
- step 905 the dispatch management unit 2805 of the control center system 2800 relates to the travel route of each mine dump truck currently traveling from the travel route management table 3000 (see FIG. 30) managed by the dispatch management unit 2805 in step 2905. Get a set of road links.
- the travel route management table 3000 manages the travel routes of all mine dumps in the mine.
- the travel route ID 3010 assigned to each travel route and the travel route ID are assigned to each travel route ID.
- a road link set 3020 of a travel route expressing the travel route as a set of road links, a start point 3030 of the travel route related to each travel route ID, a destination 3040 of the travel route related to each travel route ID, and each travel It consists of a mine dump ID 3050 that is traveling along the travel route related to the route ID.
- the vehicle allocation management unit 2805 acquires the mine dump ID of each mine dump that is currently traveling, and acquires the road link set 3020 related to each mine dump ID from the travel route management table 3000. Thereby, it is possible to acquire all road links related to the traveling route of the mine dump truck that is currently traveling.
- the control center system 2800 includes the road link requested to update the master map in step 905 in the allocation management unit 2805 in the road link set (travel route) acquired in step 2905. Determine whether or not.
- the update by the master map update request is prohibited and the process proceeds to step 2915, where there was a master map update request. If the road link is not included in the travel route of any mine dump, the update by the master map update request is permitted and the process proceeds to Step 935.
- step 2915 since there is a road link for which a master map update request is present in the travel route of any mine dump, notification that the master map cannot be updated is sent to the center side display unit 125.
- FIG. 31 shows a notification screen 3100 displayed on the center side display unit 125 in step 2915.
- the master map update impossible notification screen 3100 shown in this figure is a screen for notifying that the master map cannot be updated, and “a road with a master map update request exists on the travel route. The master map cannot be updated. ”And a confirmation button 3120 for inputting that the confirmation of the message by the operator has been completed.
- This master map update impossible notification screen 3100 notifies the operator that the master map cannot be updated because there is a road link with a change request on the travel route of any mine dump.
- step 2910 determines whether the road link requested to update the master map is included in any mine dump travel route. If it is determined in step 2910 that the road link requested to update the master map is not included in any mine dump travel route, the processing from step 935 to step 960 is performed. Since the processing is the same as the map update processing flow of the control center system 100 in the first embodiment, a description thereof will be omitted. Moreover, since the map update process flow of the vehicle-mounted terminal system 150 in the third embodiment is the same as the map update process flow of the vehicle-mounted terminal system 150 in the first embodiment, description thereof will also be omitted.
- the mine area is one or more closed areas “each mine When there is no travel route that includes a road link related to the map update request, the map data update based on the map update request is permitted.
- the master map data and the in-vehicle map data can be updated without stopping the operation of all the mine dumps under the control of the control center, so that the work efficiency by the mine dump can be improved.
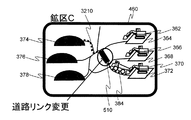
- the map data is managed in units of travel routes of each mine dump. However, if there is a travel route including the updated location of the map data, the travel is performed. A stop command is output to the mine dump for which the route is set and only the mine dump is stopped, then the map data is updated.When the map data update is completed, a departure command is output to the stopped mine dump and then restarted. It has started.
- the mine dump 384 uses a road connecting the loading field 372 and the earth discharging field 374 as a travel route 3210.
- the road link 510 is included in the travel route 3210 of the mine dump 384. Therefore, after the mine dump 384 is temporarily stopped, the master map data of the control center system and the in-vehicle map data of the mine dump 384 are updated, and the departure instruction of the mine dump 384 is output after the update is completed. Thereby, map update can be performed only by stopping operation of some mine dumps at the time of map update.
- FIG. 33 shows a system configuration diagram in the fourth embodiment.
- a vehicle allocation management unit 2805 for managing the travel route of each mine dump is added to the control center system 2000 of the second embodiment.
- the vehicle-mounted terminal system in 4th Embodiment is the same as the vehicle-mounted terminal system 2050 of 2nd Embodiment, description is abbreviate
- steps 900 to 905 are the same as the map update process flow of the control center system in the first embodiment, and the description thereof will be omitted.
- step 905 the dispatch management unit 2805 of the control center system 3300 relates to the travel route of each mine dump truck currently traveling from the travel route management table 3000 (see FIG. 30) managed by the dispatch management unit 2805 in step 3405. Get road link set.
- the control center system 3300 includes the road link requested to update the master map at step 905 in the dispatch management unit 2805 in the road link set (travel route) acquired at step 3405. Determine whether or not. If the road link for which the master map update request has been made is included in any travel route, the process proceeds to step 2110. If the road link is not included in any travel route, the process proceeds to step 935.
- step 2110 to step 2115 which is executed when the road link requested to be updated is included in any of the travel routes, is the same as the processing according to the second embodiment, and thus the description thereof is omitted. .
- step 2115 the control center system 3300 displays a notification in the step 3420 indicating that the stop of the mine dump traveling on the travel route including the road link for which the master map update request has been completed is displayed on the center side. Displayed on the part 125, and the process proceeds to Step 935.
- FIG. 35 shows a notification screen 3500 displayed on the center side display unit 125 in step 3420.
- the notification screen 3500 shown in this figure is a screen for notifying that the suspension of the mine dump has been completed, and “the mine dump suspension on the travel route for which the master map update request has been completed has been completed. You can update the master map data. ”And a confirmation button 3520 for inputting that the confirmation of the message by the operator has been completed.
- This notification screen 3500 notifies the operator that all the mine dumps for which the travel route for which the master map data is to be updated are set have been temporarily stopped.
- map update processing flow of the in-vehicle terminal system 2050 in the fourth embodiment is the same as the map update processing flow of the in-vehicle terminal system 2050 in the second embodiment, and thus the description thereof is omitted.
- the road link related to the map update request when the road link related to the map update request is included in the travel route of any mine dump, all the mine dumps for which the travel route is set are stopped. After that, it was decided to update the master map data and the in-vehicle map data. Furthermore, after the update of the master map data and in-vehicle map data is completed, a departure command is output to each mine dump that has been stopped, and the transportation work is automatically resumed. By doing so, even if there is a mine dump set with a travel route related to the map update request, the master map data and the in-vehicle map data can be updated only by stopping the mine dump, so it exists in the mine. It is possible to avoid that all the mine dumps are stopped and the work efficiency is significantly reduced. Furthermore, since the work is automatically resumed after the update of the map data is completed, the time for which the work is stopped can be kept to the minimum necessary.
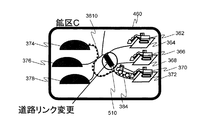
- the map data is managed in units of travel routes of each mine dump. However, if there is a travel route including the updated location of the map data, the travel is performed. The map data is updated after a new travel route is set so that the mine dump traveling on the route does not pass the road including the updated portion.
- the mine dump 384 uses a road connecting the loading field 372 and the earthing field 374 as a travel route 3210.
- the road link 510 is included in the travel route 3210 of the mine dump 384. Therefore, as shown in FIG. 36, a new travel route 3610 that does not include the road link 510 is set for the mine dump 384. Thereby, it is not necessary to stop the operation of all the mine dumps when updating the map, and the map can be updated.
- FIG. 37 shows a system configuration diagram in the fifth embodiment.
- the control center system 3700 shown in this figure deletes the temporary stop command unit 2005 and the departure instruction unit 2010 from the control center system 2000 of the fourth embodiment, and does not include a road link related to the master map update request. This is equivalent to the addition of a travel route transmission unit 3705 for transmitting.
- the in-vehicle terminal system 2050 in the fifth embodiment is the same as the in-vehicle terminal system 2050 in the fourth embodiment, description thereof is omitted.
- steps 900 and 905 are the same as the map update processing flow of the control center system 100 in the first embodiment, and step 3405 is the fourth embodiment. Since it is the same as the map update processing flow of the control center system 3300 in the embodiment, the description is omitted.
- step 3405 the vehicle allocation management unit 2805 of the control center system 3700 determines that the road link requested to update the master map in step 905 is included in the road link set (travel route) acquired in step 3405 in step 3805. Determine if it is included. If the road link for which the master map update request has been made is included in any travel route, the process proceeds to step 3810. If the road link is not included in any travel route, the process proceeds to step 935.
- the control center system 3700 uses the vehicle allocation management unit 2805 to calculate a new travel route (detour) that does not include the road link for which the master map update request has been made.
- a new travel route for example, in a road link set excluding a road link for which a master map update request has been made, a shortest route from the current value to the destination is searched, and the shortest route is determined as a new travel route. There is something to do.
- step 3815 the travel route transmission unit 3705 sends the new travel route calculated in step 3810 to the center side for the in-vehicle communication unit 165 of the mine dump that includes the road link for which the master map update request has been made.
- the data is transmitted via the communication unit 145 and the process proceeds to Step 3820.
- step 3820 the control center system 3700 receives the travel route setting completion notification transmitted from the in-vehicle side communication unit 165 at the center side communication unit 145, and proceeds to step 3825.
- step 3825 the control center system 3700 sends a notification notifying that the setting of the new travel route in step 3810 has been completed to the mine dump that includes the road link for which the map update request has been made in the travel route.
- the information is displayed on the side display unit 125, and the process proceeds to Step 935.
- FIG. 39 shows a notification screen 4000 displayed on the center side display unit 125 in Step 3825.
- the notification screen 4000 shown in this figure is a screen that informs that the setting of a new travel route has been completed. “A new travel route has been set for the mine dump on the travel route for which a master map update request has been made. You can update the master map data. ”And a confirmation button 4020 for inputting that the confirmation of the message by the operator has been completed.
- This notification screen 4000 notifies the operator that the travel route of the mine dump that includes the road link that requested the map update in the travel route is set to a new one that does not include the road link related to the map update request. .
- step 935 to step 955, the processing from step 2205 to step 2210 following this step 3825, and the processing of step 960 are the map update processing flow of the control center system in the fourth embodiment.
- the explanation is omitted because it is the same.
- map update process flow of the in-vehicle terminal system 2050 in the present embodiment is the same as the map update process flow of the in-vehicle terminal system 2050 in the fourth embodiment, and thus the description thereof is omitted.
- step 3900 the in-vehicle terminal system 2050 performs initial setting processing for receiving a processing start request from the user, checking whether the engine of the mine dump is on, or the like.
- the process start request from the user is made via the terminal side input unit 180. If there is a process start request, the process proceeds to step 3905.
- Step 3905 the in-vehicle terminal system 2050 receives the new travel route transmitted from the center side communication unit 145 in Step 3815 by the in-vehicle side communication unit 165.
- the travel command unit 2055 sets the new travel route received in step 3905 as the travel route of the mine dump 200 in the vehicle control unit 208, and causes the mine dump 200 to travel on the new travel route.
- the in-vehicle terminal system 2050 transmits a notification (travel route setting completion notification) from the in-vehicle side communication unit 165 to the center side communication unit 145 that the setting of the travel route of the mine dump has been completed.
- the mine dump temporary stop process in the in-vehicle terminal system is performed.
- the travel route of the mine dump in which the travel route is set is The master map and the in-vehicle map data are updated after a new setting so as not to pass the road link related to the map update request.
- the master map data and the in-vehicle map data can be updated without stopping the operation of all the mine dumps under the control of the control center, so that the work efficiency by the mine dump can be improved.
- each part included in the control center system is installed in the control center, and each part included in the in-vehicle terminal system is installed in the mine dump, but each part of the control center system and the in-vehicle terminal system
- the installation location is not limited to the above example. For example, you may install each part which concerns on a control center system in a mine dump.
- they may be merged.
- the master map DB and the vehicle-mounted map DB are present at the same location, they may be combined to form a map DB.
- the present invention is not limited to the above-described embodiments, and includes various modifications within the scope not departing from the gist thereof.
- the present invention is not limited to the one having all the configurations described in the above embodiments, and includes a configuration in which a part of the configuration is deleted.
- part of the configuration according to one embodiment can be added to or replaced with the configuration according to another embodiment.
- each configuration relating to the above-described control center system and in-vehicle terminal system, functions and execution processing of each configuration, etc. are partly or entirely designed by hardware (for example, logic for executing each function is designed by an integrated circuit) Etc.).
- the configuration related to the control center system and the in-vehicle terminal system may be a program (software) that can be read and executed by an arithmetic processing device (for example, a CPU) to realize each function related to the configuration of the control device.
- Information related to the program can be stored in, for example, a semiconductor memory (flash memory, SSD, etc.), a magnetic storage device (hard disk drive, etc.), a recording medium (magnetic disk, optical disc, etc.), and the like.
- control line and the information line are shown to be understood as necessary for the description of the embodiment, but all the control lines and information lines related to the product are not necessarily included. It does not always indicate. In practice, it can be considered that almost all the components are connected to each other.
- DESCRIPTION OF SYMBOLS 100 Control center system, 105 ... Dump position management part, 115 ... Center side control part, 120 ... Center side input part, 125 ... Center side display part, 130 ... Master map DB, 135 ... Master map update part, 140 ... Travel Road update determination unit, 145 ... center side communication unit, 150 ... in-vehicle terminal system, 155 ... own vehicle position positioning unit, 160 ... in-vehicle side control unit, 165 ... in-vehicle side communication unit, 170 ... in-vehicle map DB, 175 ... in-vehicle map Update unit, 180 ... vehicle-side input unit, 185 ... vehicle-side display unit, 200 ...
- mine dump 210 ... GPS antenna, 220 ... wireless LAN antenna, 230 ... mine dump cockpit, 300 ... control center, 310 ... inside control center 320 ... Control center system screen, 400 ... Mining area A area, 402 ... Mine excavator, 404 ... Loading point 406 ... Mine excavator, 408 ... Loading place, 410 ... Mine excavator, 412 ... Loading place, 414 ... Excavation field, 416 ... Excavation field, 418 ... Excavation field, 420 ... Mine dump, 422 ... Mine dump, 430 ... Mining area B area, 432 ... Mine excavator, 434 ...
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Business, Economics & Management (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Economics (AREA)
- Tourism & Hospitality (AREA)
- Strategic Management (AREA)
- General Business, Economics & Management (AREA)
- Human Resources & Organizations (AREA)
- Marketing (AREA)
- Automation & Control Theory (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Primary Health Care (AREA)
- Mathematical Physics (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- Agronomy & Crop Science (AREA)
- Mining & Mineral Resources (AREA)
- Marine Sciences & Fisheries (AREA)
- Operations Research (AREA)
- Animal Husbandry (AREA)
- General Engineering & Computer Science (AREA)
- Ecology (AREA)
- Development Economics (AREA)
- Entrepreneurship & Innovation (AREA)
- Computer Hardware Design (AREA)
- Quality & Reliability (AREA)
- Aviation & Aerospace Engineering (AREA)
- Traffic Control Systems (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
- Instructional Devices (AREA)
- Navigation (AREA)
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/021,815 US9829893B2 (en) | 2013-10-25 | 2014-10-16 | Operation management system for dump trucks |
| EP14856057.6A EP3062283A4 (en) | 2013-10-25 | 2014-10-16 | Dump truck operation management system |
| CA2924301A CA2924301C (en) | 2013-10-25 | 2014-10-16 | Operation management system for dump trucks |
| AU2014338197A AU2014338197A1 (en) | 2013-10-25 | 2014-10-16 | Dump truck operation management system |
| AU2017248565A AU2017248565A1 (en) | 2013-10-25 | 2017-10-20 | Dump truck operation management system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013222601A JP6145024B2 (ja) | 2013-10-25 | 2013-10-25 | ダンプトラックの運行管理システム |
| JP2013-222601 | 2013-10-25 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015060179A1 true WO2015060179A1 (ja) | 2015-04-30 |
Family
ID=52992778
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2014/077495 Ceased WO2015060179A1 (ja) | 2013-10-25 | 2014-10-16 | ダンプトラックの運行管理システム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9829893B2 (https=) |
| EP (1) | EP3062283A4 (https=) |
| JP (1) | JP6145024B2 (https=) |
| AU (2) | AU2014338197A1 (https=) |
| CA (1) | CA2924301C (https=) |
| WO (1) | WO2015060179A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114322993A (zh) * | 2022-03-08 | 2022-04-12 | 江苏徐工工程机械研究院有限公司 | 露天矿山无人运输系统装载区地图生成方法及系统 |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102107123B1 (ko) * | 2014-01-28 | 2020-05-06 | 현대엠엔소프트 주식회사 | 내비게이션 자동 업데이트 장치 및 방법 |
| JP6514973B2 (ja) * | 2015-06-30 | 2019-05-15 | 株式会社トプコン | 現場管理システム、飛行検出方法およびプログラム |
| DE102016204805A1 (de) * | 2016-03-23 | 2017-09-28 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren und Vorrichtungen zum Bereitstellen von Daten für ein Fahrerassistenzsystem eines Kraftfahrzeugs |
| DE102016214156A1 (de) * | 2016-08-01 | 2018-02-01 | Continental Teves Ag & Co. Ohg | Verfahren zum Senden von Daten von einem Fahrzeug an einen Server und Verfahren zum Aktualisieren einer Karte |
| FR3055500B1 (fr) * | 2016-08-29 | 2020-12-25 | Bouygues Travaux Publics | Systeme de tracabilite de deblais |
| CN106448134B (zh) * | 2016-09-06 | 2019-04-26 | 山东师范大学 | 一种应急期间地面临时交通管制方案的优化方法及系统 |
| DE102018202970A1 (de) * | 2018-02-28 | 2019-08-29 | Robert Bosch Gmbh | Verfahren zum Ermitteln einer topologischen Information einer Straßenkreuzung |
| US10853748B2 (en) * | 2018-06-05 | 2020-12-01 | Caterpillar Inc. | Managing material handling productivity |
| JP7272451B2 (ja) * | 2019-09-30 | 2023-05-12 | 日本電気株式会社 | 搬送制御方法、搬送制御装置、及び搬送制御システム |
| US20210279684A1 (en) * | 2020-03-06 | 2021-09-09 | Caterpillar Inc. | Asset management strategy using display of contextual cues to assist in zone definition |
| JP7458883B2 (ja) * | 2020-04-27 | 2024-04-01 | 株式会社小松製作所 | 運搬車両の管理システム及び運搬車両の管理方法 |
| JP7557253B2 (ja) * | 2021-03-05 | 2024-09-27 | 株式会社奥村組 | 盛土施工管理支援システム |
| JP7557254B2 (ja) * | 2021-03-05 | 2024-09-27 | 株式会社奥村組 | 盛土施工管理支援システム |
| US11953337B2 (en) * | 2021-05-12 | 2024-04-09 | Deere & Company | System and method for assisted positioning of transport vehicles for material discharge in a worksite |
| EP4312000B1 (en) | 2022-07-29 | 2025-11-05 | Leica Geosystems AG | Automatic, stationing of a geodetic survey instrument based on reference marker database |
| EP4311999B1 (en) | 2022-07-29 | 2026-01-21 | Leica Geosystems AG | Automatic, reference-free precise stationing of a geodetic survey instrument based on environment information |
| EP4361919B1 (en) | 2022-10-28 | 2025-05-14 | Volvo Truck Corporation | A network system, a user device and methods therein for enabling management of a mass excavation project |
| JP2024124703A (ja) * | 2023-03-03 | 2024-09-13 | トヨタ自動車株式会社 | 運行管理システム |
| CN116664328B (zh) * | 2023-05-23 | 2025-03-25 | 明创慧远科技集团有限公司 | 一种矿山辅助作业管理系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040122576A1 (en) | 2002-12-23 | 2004-06-24 | Sorrells Giles K. | Automated speed limiting based on machine location |
| JP2008014673A (ja) * | 2006-07-03 | 2008-01-24 | Denso Corp | 車両用ナビゲーション装置 |
| JP2008210087A (ja) * | 2007-02-26 | 2008-09-11 | Nishimatsu Constr Co Ltd | 車両運行管理システム |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6728605B2 (en) * | 2001-05-16 | 2004-04-27 | Beacon Marine Security Limited | Vehicle speed monitoring system and method |
| DE10337621B4 (de) * | 2003-08-16 | 2007-10-25 | Daimlerchrysler Ag | Verfahren zur Aktualisierung einer digitalen Karte |
| US20060271281A1 (en) * | 2005-05-20 | 2006-11-30 | Myron Ahn | Geographic information knowledge systems |
| JP4995499B2 (ja) * | 2006-06-23 | 2012-08-08 | アイシン・エィ・ダブリュ株式会社 | 地図情報配信システム |
| JP5893953B2 (ja) * | 2012-02-22 | 2016-03-23 | 日立建機株式会社 | 車両運行管理システム |
-
2013
- 2013-10-25 JP JP2013222601A patent/JP6145024B2/ja active Active
-
2014
- 2014-10-16 WO PCT/JP2014/077495 patent/WO2015060179A1/ja not_active Ceased
- 2014-10-16 EP EP14856057.6A patent/EP3062283A4/en not_active Ceased
- 2014-10-16 CA CA2924301A patent/CA2924301C/en active Active
- 2014-10-16 US US15/021,815 patent/US9829893B2/en active Active
- 2014-10-16 AU AU2014338197A patent/AU2014338197A1/en not_active Abandoned
-
2017
- 2017-10-20 AU AU2017248565A patent/AU2017248565A1/en not_active Abandoned
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040122576A1 (en) | 2002-12-23 | 2004-06-24 | Sorrells Giles K. | Automated speed limiting based on machine location |
| JP2008014673A (ja) * | 2006-07-03 | 2008-01-24 | Denso Corp | 車両用ナビゲーション装置 |
| JP2008210087A (ja) * | 2007-02-26 | 2008-09-11 | Nishimatsu Constr Co Ltd | 車両運行管理システム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3062283A4 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114322993A (zh) * | 2022-03-08 | 2022-04-12 | 江苏徐工工程机械研究院有限公司 | 露天矿山无人运输系统装载区地图生成方法及系统 |
| CN114322993B (zh) * | 2022-03-08 | 2022-07-19 | 江苏徐工工程机械研究院有限公司 | 露天矿山无人运输系统装载区地图生成方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20160231750A1 (en) | 2016-08-11 |
| CA2924301A1 (en) | 2015-04-30 |
| CA2924301C (en) | 2017-05-16 |
| JP6145024B2 (ja) | 2017-06-07 |
| EP3062283A1 (en) | 2016-08-31 |
| AU2017248565A1 (en) | 2017-11-09 |
| EP3062283A4 (en) | 2017-03-15 |
| US9829893B2 (en) | 2017-11-28 |
| AU2014338197A1 (en) | 2016-04-07 |
| JP2015084177A (ja) | 2015-04-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6145024B2 (ja) | ダンプトラックの運行管理システム | |
| JP6302596B2 (ja) | 交通管制サーバ及びシステム | |
| AU2015344388B2 (en) | Map creation device | |
| JP6368259B2 (ja) | 交通管制サーバ、交通管制システム | |
| US9383754B2 (en) | Management system and management method | |
| JP6267059B2 (ja) | 車両管理システム | |
| US10311526B2 (en) | Management system and method for operating a mining machine | |
| JP6352841B2 (ja) | 車載端末装置及び交通管制システム | |
| JP2015194924A (ja) | 作業機械の地図編集システム | |
| JP6211449B2 (ja) | 運行管理サーバ、車載端末装置、及び運行管理システム | |
| WO2016027830A1 (ja) | 管制制御装置及び運搬車両の走行シミュレーション方法 | |
| WO2016051524A1 (ja) | 運転支援システム、車両、運転支援端末装置、及び運転支援プログラム | |
| JP2016218576A (ja) | 管制サーバ及び交通管制システム | |
| JP2020197885A (ja) | 車両管理システム | |
| JP2020086779A (ja) | 作業車両、作業エリア管理システム | |
| US11869355B2 (en) | Management system of work site and management method of work site |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14856057 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2924301 Country of ref document: CA |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15021815 Country of ref document: US |
|
| REEP | Request for entry into the european phase |
Ref document number: 2014856057 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2014856057 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2014338197 Country of ref document: AU Date of ref document: 20141016 Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |