JP6145024B2 - ダンプトラックの運行管理システム - Google Patents
ダンプトラックの運行管理システム Download PDFInfo
- Publication number
- JP6145024B2 JP6145024B2 JP2013222601A JP2013222601A JP6145024B2 JP 6145024 B2 JP6145024 B2 JP 6145024B2 JP 2013222601 A JP2013222601 A JP 2013222601A JP 2013222601 A JP2013222601 A JP 2013222601A JP 6145024 B2 JP6145024 B2 JP 6145024B2
- Authority
- JP
- Japan
- Prior art keywords
- map data
- mine
- dump
- vehicle
- map
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000005065 mining Methods 0.000 claims description 100
- 230000008859 change Effects 0.000 claims description 2
- 238000000034 method Methods 0.000 description 90
- 230000008569 process Effects 0.000 description 89
- 238000007726 management method Methods 0.000 description 81
- 238000012545 processing Methods 0.000 description 58
- 238000004891 communication Methods 0.000 description 54
- 229910052500 inorganic mineral Inorganic materials 0.000 description 16
- 239000011707 mineral Substances 0.000 description 16
- 238000010586 diagram Methods 0.000 description 13
- 238000012790 confirmation Methods 0.000 description 11
- 239000004576 sand Substances 0.000 description 11
- 238000009412 basement excavation Methods 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 4
- 238000007599 discharging Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 239000013049 sediment Substances 0.000 description 4
- 239000000725 suspension Substances 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 2
- 230000004913 activation Effects 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 238000007792 addition Methods 0.000 description 1
- 238000012508 change request Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000012217 deletion Methods 0.000 description 1
- 230000037430 deletion Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images






































Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
- G05D1/0291—Fleet control
- G05D1/0297—Fleet control by controlling means in a control room
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Systems or methods specially adapted for specific business sectors, e.g. utilities or tourism
- G06Q50/02—Agriculture; Fishing; Mining
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3807—Creation or updating of map data characterised by the type of data
- G01C21/3815—Road data
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
-
- G06Q50/40—
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/123—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams
- G08G1/133—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams within the vehicle ; Indicators inside the vehicles or at stops
- G08G1/137—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams within the vehicle ; Indicators inside the vehicles or at stops the indicator being in the form of a map
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/20—Monitoring the location of vehicles belonging to a group, e.g. fleet of vehicles, countable or determined number of vehicles
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/003—Maps
- G09B29/006—Representation of non-cartographic information on maps, e.g. population distribution, wind direction, radiation levels, air and sea routes
- G09B29/007—Representation of non-cartographic information on maps, e.g. population distribution, wind direction, radiation levels, air and sea routes using computer methods
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/10—Map spot or coordinate position indicators; Map reading aids
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
Description
はじめに、本発明の第1の実施の形態について説明する。本実施の形態では、鉱山ダンプの自律走行システムにおいて、地図データの管理を鉱区エリア単位で行い、地図データの更新箇所が含まれる鉱区エリア内に鉱山ダンプが存在しない場合に地図データを更新している。なお、ここでは、複数の鉱区エリアから成る鉱山サイトは、1つの管制センタが管理しているものとする。
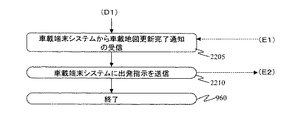
次に本発明の第2の実施の形態について説明する。本実施の形態では、第1の実施の形態と同様に地図データの管理を鉱区エリア単位で行うが、地図データの更新箇所が含まれる鉱区エリア内に鉱山ダンプが存在する場合には、その鉱山ダンプに停止指令を出力して当該鉱山ダンプのみを停止させてからマスター地図データと車載地図データを更新し、これらの地図データの更新が完了したら当該停止させた鉱山ダンプに出発指令を出力して再始動している。
次に本発明の第3の実施の形態について説明する。本実施の形態では、地図データの管理を鉱山ダンプの走行経路(各鉱山ダンプに設定されている出発地から目的地までの経路)単位で行い、どの鉱山ダンプの走行経路にも地図データの更新箇所が含まれない場合に地図データを更新している。
次に本発明の第4の実施の形態について説明する。本実施の形態では、第3の実施の形態と同様に地図データの管理を各鉱山ダンプの走行経路単位で行うが、地図データの更新箇所が含まれる走行経路が存在する場合には、その走行経路が設定された鉱山ダンプに停止指令を出力して当該鉱山ダンプのみを停止させてから地図データの更新し、地図データの更新が完了したら当該停止させた鉱山ダンプに出発指令を出力して再始動している。
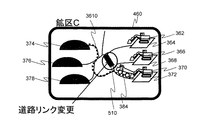
次に第5の実施の形態について説明する。本実施の形態では、第3の実施の形態と同様に地図データの管理を各鉱山ダンプの走行経路単位で行うが、地図データの更新箇所が含まれる走行経路が存在する場合には、その走行経路上を走行する鉱山ダンプに対して当該更新箇所が含まれる道路を通らないように新たな走行経路を設定してから地図データを更新している。
Claims (7)
- ダンプトラックが走行可能な道路地図を複数の道路リンクの結合で定義した地図データが記憶された記憶装置と、
前記地図データに基づいて走行する複数のダンプトラックと、
前記地図データの一部の更新に際して、
当該地図データの一部を構成する道路リンクの少なくとも1つが、前記道路地図上で予め設定した1以上の所定の閉領域内に含まれていない場合、
または、
当該地図データの一部を構成する道路リンクの少なくとも1つが、前記1以上の閉領域のいずれかに含まれているが、当該1以上の閉領域のいずれにも前記複数のダンプトラックのいずれもが存在しない場合に、
前記地図データの一部の更新を許可するように構成された制御装置とを備えることを特徴とするダンプトラックの運行管理システム。 - 請求項1に記載のダンプトラックの運行管理システムにおいて、
前記1以上の閉領域は、前記複数のダンプトラックのそれぞれの走行経路であり、
前記制御装置は、前記地図データの一部の更新に際して、前記地図データの一部を構成する道路リンクの少なくとも1つが前記複数のダンプトラックの走行経路のいずれにも含まれていない場合に、前記地図データの一部の更新を許可するように構成されていることを特徴とするダンプトラックの運行管理システム。 - 請求項2に記載のダンプトラックの運行管理システムにおいて、
前記制御装置は、前記地図データの一部の更新に際して、前記地図データの一部を構成する道路リンクの少なくとも1つが前記複数のダンプトラックの走行経路のいずれかに含まれている場合には、当該地図データの一部を構成する道路リンクの少なくとも1つが含まれている走行経路が設定されたダンプトラックに停止指令を出力し、その後に前記地図データを更新するように構成されていることを特徴とするダンプトラックの運行管理システム。 - 請求項2に記載のダンプトラックの運行管理システムにおいて、
前記制御装置は、前記地図データの一部の更新に際して、前記地図データの一部を構成する道路リンクの少なくとも1つが前記複数のダンプトラックの走行経路のいずれかに含まれている場合には、当該地図データの一部を構成する道路リンクの少なくとも1つが含まれている走行経路が設定されたダンプトラックの走行経路を前記地図データの一部を含まないように変更し、その後に前記地図データを更新するように構成されていることを特徴とするダンプトラックの運行管理システム。 - 請求項1に記載のダンプトラックの運行管理システムにおいて、
前記1以上の閉領域は、鉱山内を複数に区画して得られる複数の鉱区であり、
前記制御装置は、前記地図データの一部の更新に際して、前記複数の鉱区のうち前記地図データの一部を構成する道路リンクの少なくとも1つが含まれている鉱区に前記複数のダンプトラックのいずれもが存在しない場合に、前記地図データの一部の更新を許可するように構成されていることを特徴とするダンプトラックの運行管理システム。 - 請求項5に記載のダンプトラックの運行管理システムにおいて、
前記制御装置は、前記地図データの一部の更新に際して、前記複数の鉱区のうち前記地図データの一部を構成する道路リンクの少なくとも1つが含まれている鉱区に前記複数のダンプトラックのいずれかが存在している場合には、前記地図データの一部を構成する道路リンクの少なくとも1つが含まれている鉱区に存在するダンプトラックに停止指令を出力し、その後に前記地図データを更新するように構成されていることを特徴とするダンプトラックの運行管理システム。 - 請求項3または6に記載のダンプトラックの運行管理システムにおいて、
前記制御装置は、さらに、前記地図データの更新完了を確認してから、前記停止指令により停止したダンプトラックを再始動するための出発指令を出力するように構成されていることを特徴とするダンプトラックの運行管理システム。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013222601A JP6145024B2 (ja) | 2013-10-25 | 2013-10-25 | ダンプトラックの運行管理システム |
| PCT/JP2014/077495 WO2015060179A1 (ja) | 2013-10-25 | 2014-10-16 | ダンプトラックの運行管理システム |
| EP14856057.6A EP3062283A4 (en) | 2013-10-25 | 2014-10-16 | Dump truck operation management system |
| US15/021,815 US9829893B2 (en) | 2013-10-25 | 2014-10-16 | Operation management system for dump trucks |
| AU2014338197A AU2014338197A1 (en) | 2013-10-25 | 2014-10-16 | Dump truck operation management system |
| CA2924301A CA2924301C (en) | 2013-10-25 | 2014-10-16 | Operation management system for dump trucks |
| AU2017248565A AU2017248565A1 (en) | 2013-10-25 | 2017-10-20 | Dump truck operation management system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013222601A JP6145024B2 (ja) | 2013-10-25 | 2013-10-25 | ダンプトラックの運行管理システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015084177A JP2015084177A (ja) | 2015-04-30 |
| JP2015084177A5 JP2015084177A5 (ja) | 2016-07-07 |
| JP6145024B2 true JP6145024B2 (ja) | 2017-06-07 |
Family
ID=52992778
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013222601A Active JP6145024B2 (ja) | 2013-10-25 | 2013-10-25 | ダンプトラックの運行管理システム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9829893B2 (ja) |
| EP (1) | EP3062283A4 (ja) |
| JP (1) | JP6145024B2 (ja) |
| AU (2) | AU2014338197A1 (ja) |
| CA (1) | CA2924301C (ja) |
| WO (1) | WO2015060179A1 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102107123B1 (ko) * | 2014-01-28 | 2020-05-06 | 현대엠엔소프트 주식회사 | 내비게이션 자동 업데이트 장치 및 방법 |
| JP6514973B2 (ja) * | 2015-06-30 | 2019-05-15 | 株式会社トプコン | 現場管理システム、飛行検出方法およびプログラム |
| DE102016204805A1 (de) * | 2016-03-23 | 2017-09-28 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren und Vorrichtungen zum Bereitstellen von Daten für ein Fahrerassistenzsystem eines Kraftfahrzeugs |
| DE102016214156A1 (de) * | 2016-08-01 | 2018-02-01 | Continental Teves Ag & Co. Ohg | Verfahren zum Senden von Daten von einem Fahrzeug an einen Server und Verfahren zum Aktualisieren einer Karte |
| FR3055500B1 (fr) * | 2016-08-29 | 2020-12-25 | Bouygues Travaux Publics | Systeme de tracabilite de deblais |
| CN106448134B (zh) * | 2016-09-06 | 2019-04-26 | 山东师范大学 | 一种应急期间地面临时交通管制方案的优化方法及系统 |
| DE102018202970A1 (de) * | 2018-02-28 | 2019-08-29 | Robert Bosch Gmbh | Verfahren zum Ermitteln einer topologischen Information einer Straßenkreuzung |
| US10853748B2 (en) * | 2018-06-05 | 2020-12-01 | Caterpillar Inc. | Managing material handling productivity |
| JP7272451B2 (ja) * | 2019-09-30 | 2023-05-12 | 日本電気株式会社 | 搬送制御方法、搬送制御装置、及び搬送制御システム |
| US20210279684A1 (en) * | 2020-03-06 | 2021-09-09 | Caterpillar Inc. | Asset management strategy using display of contextual cues to assist in zone definition |
| JP7458883B2 (ja) | 2020-04-27 | 2024-04-01 | 株式会社小松製作所 | 運搬車両の管理システム及び運搬車両の管理方法 |
| US11953337B2 (en) * | 2021-05-12 | 2024-04-09 | Deere & Company | System and method for assisted positioning of transport vehicles for material discharge in a worksite |
| CN114322993B (zh) * | 2022-03-08 | 2022-07-19 | 江苏徐工工程机械研究院有限公司 | 露天矿山无人运输系统装载区地图生成方法及系统 |
| EP4312000A1 (en) | 2022-07-29 | 2024-01-31 | Leica Geosystems AG | Automatic, stationing of a geodetic survey instrument based on reference marker database |
| EP4311999A1 (en) | 2022-07-29 | 2024-01-31 | Leica Geosystems AG | Automatic, reference-free precise stationing of a geodetic survey instrument based on environment information |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6728605B2 (en) * | 2001-05-16 | 2004-04-27 | Beacon Marine Security Limited | Vehicle speed monitoring system and method |
| US6996464B2 (en) * | 2002-12-23 | 2006-02-07 | Caterpillar Inc | Automated speed limiting based on machine located |
| DE10337621B4 (de) * | 2003-08-16 | 2007-10-25 | Daimlerchrysler Ag | Verfahren zur Aktualisierung einer digitalen Karte |
| US20060271281A1 (en) * | 2005-05-20 | 2006-11-30 | Myron Ahn | Geographic information knowledge systems |
| JP4995499B2 (ja) * | 2006-06-23 | 2012-08-08 | アイシン・エィ・ダブリュ株式会社 | 地図情報配信システム |
| JP2008014673A (ja) * | 2006-07-03 | 2008-01-24 | Denso Corp | 車両用ナビゲーション装置 |
| JP4889031B2 (ja) * | 2007-02-26 | 2012-02-29 | 西松建設株式会社 | 車両運行管理システム |
| JP5893953B2 (ja) * | 2012-02-22 | 2016-03-23 | 日立建機株式会社 | 車両運行管理システム |
-
2013
- 2013-10-25 JP JP2013222601A patent/JP6145024B2/ja active Active
-
2014
- 2014-10-16 WO PCT/JP2014/077495 patent/WO2015060179A1/ja active Application Filing
- 2014-10-16 AU AU2014338197A patent/AU2014338197A1/en not_active Abandoned
- 2014-10-16 CA CA2924301A patent/CA2924301C/en active Active
- 2014-10-16 EP EP14856057.6A patent/EP3062283A4/en active Pending
- 2014-10-16 US US15/021,815 patent/US9829893B2/en active Active
-
2017
- 2017-10-20 AU AU2017248565A patent/AU2017248565A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| CA2924301A1 (en) | 2015-04-30 |
| EP3062283A1 (en) | 2016-08-31 |
| EP3062283A4 (en) | 2017-03-15 |
| AU2017248565A1 (en) | 2017-11-09 |
| CA2924301C (en) | 2017-05-16 |
| US9829893B2 (en) | 2017-11-28 |
| US20160231750A1 (en) | 2016-08-11 |
| JP2015084177A (ja) | 2015-04-30 |
| WO2015060179A1 (ja) | 2015-04-30 |
| AU2014338197A1 (en) | 2016-04-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6145024B2 (ja) | ダンプトラックの運行管理システム | |
| AU2015344388B2 (en) | Map creation device | |
| JP6302596B2 (ja) | 交通管制サーバ及びシステム | |
| US9383754B2 (en) | Management system and management method | |
| JP6426941B2 (ja) | 管制制御装置及び運搬車両の走行シミュレーション方法 | |
| JP6352841B2 (ja) | 車載端末装置及び交通管制システム | |
| US10311526B2 (en) | Management system and method for operating a mining machine | |
| WO2016051524A1 (ja) | 運転支援システム、車両、運転支援端末装置、及び運転支援プログラム | |
| JP6267059B2 (ja) | 車両管理システム | |
| JP2016153987A (ja) | 交通管制サーバ、車載端末装置及び交通管制システム | |
| JP2015194924A (ja) | 作業機械の地図編集システム | |
| JP6211449B2 (ja) | 運行管理サーバ、車載端末装置、及び運行管理システム | |
| JP6814714B2 (ja) | 施工管理システム | |
| JP7241606B2 (ja) | 車両管理システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160518 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160518 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20160518 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170425 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170512 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6145024 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |