WO2014103095A1 - 鉗子 - Google Patents
鉗子 Download PDFInfo
- Publication number
- WO2014103095A1 WO2014103095A1 PCT/JP2013/004527 JP2013004527W WO2014103095A1 WO 2014103095 A1 WO2014103095 A1 WO 2014103095A1 JP 2013004527 W JP2013004527 W JP 2013004527W WO 2014103095 A1 WO2014103095 A1 WO 2014103095A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- forceps
- portions
- bent
- pair
- clamping
- Prior art date
Links
Images

Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/2804—Surgical forceps with two or more pivotal connections
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00681—Aspects not otherwise provided for
- A61B2017/00738—Aspects not otherwise provided for part of the tool being offset with respect to a main axis, e.g. for better view for the surgeon
Definitions
- the present invention relates to a forceps, and more particularly, to a forceps used for treating a living tissue during a surgical operation.
- Patent Document 1 describes “a scissor structure that is received in an endoscopic operation in an abdominal cavity or a chest cavity or in an intercostal operation. Eliminates the critical limitations of surgical instruments, provides convenience and safety that is the same as that for surgical operation under direct vision in laparotomy and thoracotomy, and also provides the economics of reducing the burden on patients and medical administration
- object (paragraph number 0004 of Patent Document 1),“ •• when the tip portion is closed, the handle portions intersect each other between the fulcrum and the grip portion.
- “Surgery instrument to perform” (Claim 1 of Patent Document 1).
- Patent Document 2 discloses a forceps that accurately clamps hemorrhoids in a narrow anal canal and suppresses bleeding at the time of suturing. "Surgical forceps characterized by being gently curved" (Claim 1 of Patent Document 2).
- the forceps used in the surgical operation have been developed with various shapes depending on the use situation and the like.
- the burden on the patient and the medical staff is reduced, and convenience and safety are reduced. Further development of the provided forceps is desired.
- a blood vessel running through the body from an incised hole is clamped with forceps to stop bleeding, the forceps tend to stand up from the body surface. It tends to tilt toward the outside, and an extra force is easily applied to the blood vessel. Since a blood vessel is a delicate tissue, if an excessive force is applied, the living tissue is damaged, and the endothelial tissue is easily damaged or a thrombus is easily generated without being cut or destroyed.
- the present invention has been made to solve such a problem, and provides a forceps that does not interfere with surgical operation in a surgical field in surgery, has excellent operability, and does not easily damage a biological tissue such as a blood vessel. For the purpose.
- a pair of forceps members has a clamping part on one side, an operation part on the other side, and a motion transmission part between the clamping part and the operation part, and the motion transmission according to opening and closing of the operation part.
- a forceps that opens and closes the clamping part via a part,
- Each of the operation part and the clamping part has at least one bent part,
- the movement transmitting unit is a forceps that forms a lever mechanism that transmits an opening / closing movement of the operation unit as an opening / closing movement of the clamping unit.
- An angle ⁇ 1 formed by the first plane including the pair of operation units and the second plane including the pair of motion transmission units is 105 to 135 °
- the clamping portion is the forceps according to (1) or (2), which includes two bent portions, (4)
- the bending angle of the second bending portion adjacent to the motion transmitting portion in the clamping portion and the bending angle of the third bending portion adjacent to the second bending portion in the clamping portion are 105 to 135 °, respectively.
- the length of the operation part is 40 to 80 mm
- the length from the tip of the clamping part to the third bent part is 1 to 5 mm
- the length from the third bent part to the second bent part is 0
- the operation portion since the operation portion has at least one bent portion, the portion of the conventional forceps that is standing from the body surface when sandwiching a biological tissue such as a blood vessel in the body is Since they are arranged along the front surface, no excessive force is applied to the living tissue such as blood vessels, so that it is difficult to damage the living tissue, and the forceps do not interfere with the surgical operation in the operative field.
- the said clamping part since the said clamping part has at least 1 bending part, biological tissues, such as a blood vessel, can be clamped in the posture where the clamping part inserted in the body is not unreasonable, and it is hard to damage a biological tissue.
- the movement transmitting unit forms a lever mechanism that transmits the opening / closing movement of the operation unit as the opening / closing movement of the clamping unit, the shape of the movement transmitting unit hardly changes during the opening / closing movement.
- the holding part can be opened and closed in a state where the pair of motion transmission parts are hardly separated from each other, the operability when holding a biological tissue such as a blood vessel in a limited space at the incision site is excellent.
- FIG. 1 is a schematic explanatory view of a forceps showing one embodiment of a forceps according to the present invention.
- FIG. 1A is a schematic top view of a forceps showing an embodiment of the forceps according to the present invention
- FIG. 1B is a schematic side view of the forceps showing an embodiment of the forceps according to the present invention.
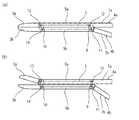
- FIG. FIG. 2 is a main part schematic diagram showing the motion transmission part in an enlarged manner.
- FIG. 2 (a) is an enlarged schematic view of the main part of the motion transmitting part when the clamping part is closed
- FIG. 2 (b) shows the motion when the clamping part is open. It is a principal part schematic diagram which expands and shows a transmission part.
- FIG. 1A is a schematic top view of a forceps showing an embodiment of the forceps according to the present invention
- FIG. 1B is a schematic side view of the forceps showing an embodiment of the forceps according to the present invention.
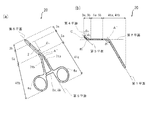
- FIG. 3 is a schematic explanatory view of a forceps showing another embodiment of the forceps according to the present invention.
- FIG. 3A is a schematic top view of a forceps showing an embodiment of the forceps according to the present invention
- FIG. 3B is a schematic side view of the forceps showing an embodiment of the forceps according to the present invention.
- FIG. 1 is a schematic explanatory view of a forceps showing one embodiment of a forceps according to the present invention.
- FIG. 1A is a schematic top view of a forceps showing an embodiment of the forceps according to the present invention
- FIG. 1B is a schematic side view of the forceps showing an embodiment of the forceps according to the present invention.
- the forceps 1 of this embodiment includes a pair of forceps members 2 having one holding portion 3a, 3b, the other operation portion 4a, 4b, and the holding portion 3a, 3b and the operation portion 4a. 4b, movement transmitting portions 5a and 5b are respectively provided, and the holding portions 3a and 3b are opened and closed via the movement transmitting portions 5a and 5b according to the opening and closing of the operation portions 4a and 4b.
- the forceps member 2 can be formed of a material generally used as a material for medical forceps, for example, titanium, a titanium alloy such as Ti6Al4, stainless steel, or the like.
- the operation units 4a and 4b are portions that are opened and closed by a medical worker and open and close the pair of operation units 4a and 4b.
- the operation parts 4a and 4b are ring-shaped ring parts 6a and 6b for inserting fingers, handle parts 7a and 7b extending from the ring parts 6a and 6b, and ring parts 6a and 6b of the handle parts 7a and 7b.
- And ratchet portions 8a and 8b provided on opposite sides of the pair of handle portions 7a and 7b at the end portions on the side.
- the length of the operation parts 4a and 4b is preferably 40 to 80 mm, for example, 60 mm, from the viewpoint of the use part of the forceps and the operability.
- the handle portions 7a and 7b have first bent portions A that are bent to the opposite side to the side where the fingers are inserted in the ring portions 6a and 6b.
- the bending angle at the first bent portion A is from the end of the pair of operation portions 4a and 4b to the first bent portion A when the pair of operation portions 4a and 4b are viewed from the side.
- plane a first plane including a central axis, a pair of motion transmitting portion 5a, a plane including the central axis of 5b as a second plane can be represented by the angle theta 1 between the first and second planes, ⁇ 1 is 120 °.
- the angle ⁇ 1 formed in the forceps 1 of this embodiment is 120 °.
- the ring parts 6a and 6b are placed on the body surface.
- the angle may be any angle as long as it is disposed along the line, and ⁇ 1 is preferably 105 ° to 135 °, and more preferably 115 ° to 125 °.
- the forceps may stand up from the body surface.
- the operation portions 4a and 4b, particularly the ring portion 6a. , 6b is arranged along the body surface, so that excessive force is not applied to the living tissue such as blood vessels, so that it is difficult to damage the living tissue, and the forceps do not interfere with the surgical operation in the operative field.
- one of the handle portions 7a, 7b is integrally formed with one of the motion transmitting portions 5a when the pair of operation portions 4a, 4b are viewed from above. It extends in a straight line.
- the other handle portion 7b is connected to the other motion transmission portion 5b as a separate body and connected at a predetermined angle. Accordingly, the one handle 7a and the other handle 7b are the ends on the side of the motion transmitting portions 5a and 5b so that one handle 7a, the other handle 7b, and the ratchet 8a, 8b form a triangle. It intersects at a predetermined angle at the part.
- the length of the handle portions 7a and 7b is not particularly limited, but is 20 to 60 mm, for example, in consideration of the use site and operability of the forceps.
- the cross-sectional shape of the handle portions 7a and 7b is, for example, a square with R added to the corner, and the dimension is 1.5 to 2.5 mm ⁇ 1 to 2 mm, for example 2.0 mm ⁇ 1.5 mm. It should be noted that all the corners of the outer surface of the forceps 1 are preferably marked with R so as not to damage the living tissue.
- the ratchet portions 8a and 8b are formed so that the opening angles of the holding portions 3a and 3b can be positioned so that the holding portions 3a and 3b do not open and close after holding an object to be held such as a blood vessel.
- the ratchet portions 8a and 8b extend from one operation portion 4a and 4b toward the other operation portion 4b and 4a.
- the pair of ratchet portions 8a and 8b are closed, the pair of ratchet portions 8a and 8b.
- the closed state of the pair of operation parts 4a and 4b does not mean a state in which the pair of operation parts 4a and 4b, particularly the pair of handle parts 7a and 7b are in contact with each other in parallel, but a pair of operations.
- the parts 4a and 4b intersect at a predetermined angle, and even if a force is applied in the direction in which the pair of operation parts 4a and 4b approach each other, the angle does not decrease any more.
- 2 to 10 ridges and valleys are formed on the surface where the pair of ratchet portions 8a and 8b are opposed to each other.
- the ridge formed on one ratchet portion 8a and 8b and the other ratchet portion 8b are formed.
- the clamping portions 3a and 3b can be fixed in an open state at a specific angle depending on the size of the sandwiched object. Yes.
- the operator When releasing this fixed state, the operator inserts a finger into the ring portions 6a and 6b and applies a force of a predetermined level or more in a direction to separate the pair of operation portions 4a and 4b, so that the ratchet portion 8a, By disengaging one peak and the other valley in 8b.
- the movement transmitting parts 5a and 5b form a double lever mechanism that transmits the opening and closing movements of the operation parts 4a and 4b as the opening and closing movements of the clamping parts 3a and 3b. Since the motion transmission units 5a and 5b form a lever mechanism, the shape of the motion transmission units 5a and 5b hardly changes during opening and closing movements. In other words, the pair of motion transmission units 5a and 5b are almost identical to each other.
- the clamping portions 3a and 3b can be opened and closed without being separated. In order to reduce the burden on the patient, the length of the incision site is usually kept to a minimum.
- the conventional forceps that is the same mechanism as the scissors, that is, a forceps member is overlapped with a hinge as a pivot, and is opened and closed.
- the pair of forceps members are opened and closed in a fan shape around the hinge, so that a space corresponding to the opening and closing width is required.
- the handle extending from the hinge to the rear end side becomes longer, so the opening / closing width is increased accordingly, to other forceps and incision sites. The operability is likely to deteriorate due to contact with the surface.
- FIG. 2 is an enlarged schematic view of the main part showing the motion transmission part
- FIG. 2 (a) shows the motion transmission part when the clamping part is closed
- FIG. 2 (b) shows the clamping.
- the movement transmission part when a part is an open state is shown.
- one motion transmitting portion 5b and the other motion transmitting portion 5a are composed of the first link 9 at the tip of one operating portion 4b and the other clamping portion 3a.
- the second link 10 at the proximal end is connected via four pins from the first pin 11 to the fourth pin 14.
- the first link 11 and the second link 12 act as a lever
- one motion transmission portion 5b acts as a fixed link to form a double lever mechanism.
- the first pin 11, the second pin 12, the third pin 13, the fourth pin 14, and Virtual lines L connecting the first pins 11 in the order of the first pins 11 form a parallelogram.
- the imaginary line L has a shape approximating a rectangle, and between the pair of motion transmitting portions 5a and 5b. Is slightly separated by, for example, 0.1 to 0.5 mm.
- the outer shapes of the motion transmitting units 5a and 5b are hardly changed by opening and closing the clamping units 3a and 3b.
- the cross-sectional shape and thickness of the motion transmitting portions 5a and 5b can be a shape and thickness approximate to the handle portions 7a and 7b, and the length is 15 to from the viewpoint of the use site of the forceps and the operability. It is preferably 50 mm, for example 25 mm.
- One motion transmission portion 5b is linearly connected to one clamping portion 5b and acts as a fixed link.
- the movement transmitting portion 5b and the first link 9 at the end of the one operation portion 4b are connected via the first pin 11, and the one operation portion 4b rotates around the first pin 11.
- the end of the first link 9 opposite to the first pin 11 is connected to the other motion transmission portion 5a via the second pin 12, and the other motion transmission is performed according to the rotation of one operation portion 4b.
- the part 5a responds.
- the other motion transmitting portion 5a is integrally connected to the other operation portion 4a in a straight line, and is connected to the second link 10 at the proximal end of the other holding portion 3a via a third pin 13.
- An end portion of the second link 10 opposite to the third pin 13 is connected to one motion transmission portion 5 b via a fourth pin 14.
- the other motion transmission unit 5a connected to the first link 9 via the second pin 12 responds with the rotation of the one operation unit 4b
- the second link 10 responds with this response,
- the other clamping part 3a rotates around the fourth pin 14.
- the first link 9 is provided at a predetermined angle with respect to the handle portion 7b
- the second link 10 is provided at a predetermined angle with respect to the holding portion 3a.
- the first link 9 and the second link 10 are slightly longer than the total length of the motion transmitting portions 5a and 5b. Therefore, when the clamping portions 3a and 3b are closed, the pair of motion transmission portions 5a and 5b are in contact with each other, and the first link 9 and the second link 10 are orthogonal to the longitudinal direction of the motion transmission portions 5a and 5b.
- the first link 9 and the second link 10 are formed so as not to protrude from the width direction of the motion transmitting units 5a and 5b. Further, as shown in FIG.
- the first link 9 and the second link 10 are arranged in a direction substantially orthogonal to the motion transmitting portions 5a and 5b.
- the first link 9 and the second link 10 are formed so as not to protrude from the width direction of the motion transmitting portions 5a and 5b, and the motion transmitting portions 5a and 5b are slightly separated from each other.
- the clamping parts 3a and 3b clamp biological tissues such as blood vessels in a living body, sutures, instruments, and the like.
- the sandwiching portions 3a and 3b open and close when the opening / closing motions of the operation portions 4a and 4b are transmitted through the motion transmitting portions 5a and 5b.
- the rotational movement of one operation part 4b is transmitted as the rotational movement of the other clamping part 3a by both lever mechanisms, and the clamping parts 3a and 3b are opened and closed.
- the sandwiching portions 3a and 3b are adjacent to the motion transmitting portions 5a and 5b, adjacent to the second bent portion B bent to the opposite side of the first bent portion A, and adjacent to the second bent portion B. And a third bent portion C bent in the same direction as the bent portion B.
- the bending angle at the second bending portion B is such that when the forceps 1 is viewed from the side, the plane including the central axis of the pair of motion transmitting portions 5a and 5b is the second plane and the pair of sandwiched portions.
- ⁇ 2 is 120 °.
- the angle ⁇ 2 formed in the forceps 1 of this embodiment is 120 °, but it may be any angle as long as the object to be clamped in the body can be clamped in a reasonable posture, and ⁇ 2 is 105 ° to 135 °. It is preferred that the angle is 115 ° to 125 °.
- the bending angle at the third bent portion C is such that when the forceps 1 is viewed from the side, a plane including the central axis between the third bent portion C and the tip of the pair of sandwiching portions 3a and 3b is defined as a fourth plane. It can be represented by an angle ⁇ 3 formed by the third plane and the fourth plane, and ⁇ 3 is 120 °.
- the angle ⁇ 3 formed by the forceps 1 of this embodiment may be any angle that allows the object to be clamped in the body to be held in a comfortable posture, and ⁇ 3 is preferably 105 ° to 135 °, and 115 It is particularly preferred that the angle is from ° to 125 °.
- the clamping portions 3a and 3b of the forceps 1 are bent at an angle within the above range, a living tissue such as a blood vessel in a living body can be held in a comfortable posture, so that the living tissue such as a blood vessel cannot be forced. It is difficult to damage the living tissue.
- the first bent portion A, the second bent portion B, and the third bent portion C described above are all bent at an appropriate bending radius.
- the length of the sandwiching portions 3a and 3b is not particularly limited.
- the length from the tip of the sandwiching portions 3a and 3b to the third bent portion C is 1 to 5 mm, for example 3 mm.
- the length to the second bent portion B is 0 to 20 mm, particularly 1 to 10 mm, for example 10 mm, and the length from the second bent portion B to the end connected to the motion transmitting portions 5a and 5b is 1 to 1 mm. 10 mm, for example 5 mm.
- the outer peripheral surfaces of the sandwiching portions 3a and 3b have an appropriate roundness so as not to damage the living tissue.
- the thickness of the sandwiching portions 3a, 3b is, for example, thinner than the handle portions 7a, 7b, and is formed so as to become gradually thinner toward the tip.
- the cross section in the vicinity of the center in the longitudinal direction of the sandwiching portions 3a, 3b is 0.8 to 1.8 ⁇ 0.5 to 1.5 mm, for example 1.3 mm ⁇ 1.0 mm.
- the opposing surfaces that the pair of sandwiching portions 3a and 3b face may be flat surfaces, and when the sandwiched object is sandwiched, the sandwiched object can be reliably secured with an appropriate frictional force without damaging the sandwiched object.
- interposed may be formed.
- the movement transmitting portion 5a responds, and with this response, the second link 10 rotates around the fourth pin so as to approach the direction perpendicular to the longitudinal direction of the motion transmitting portions 5a and 5b.
- the other holding portion 3a integrally connected to the two links 10 rotates around the fourth pin 14 in a direction away from the one holding portion 3b.
- a clamping object such as a blood vessel is arranged between the pair of clamping parts 3a and 3b. Since the clamping portions 3a and 3b have the second bent portion B and the third bent portion C, for example, even if the blood vessel is disposed in a place where it is difficult to hold in the living body, an excessive force is exerted on the blood vessel and its surrounding tissue. A blood vessel can be disposed between the pair of sandwiching portions 3a and 3b so as not to apply.
- the one operation unit 4b rotates around the first pin 11 in a direction to approach the other operation unit 4a.
- the other motion transmission unit 5a connected to the first link 9 via the second pin 12 responds, and the second link 10 responds according to this response.
- the other clamping part 3a rotates around the fourth pin 14 in a direction approaching the one clamping part 3b.
- the operation parts 4a and 4b do not stand from the body surface from 5a and 5b, and the ring parts 6a and 6b in the operation parts 4a and 4b are arranged along the body surface. Therefore, the forceps 1 do not come into contact with the operator's hand in the subsequent surgical operation and do not get in the way.
- the posture of the ring portions 6a and 6b is not greatly changed, for example, the tilts according to gravity, so that it is impossible for the sandwiched object and the surrounding tissue. It is difficult to damage the living tissue.
- the pair of movement transmitting parts 5a and 5b are slightly separated from each other, and the outer shape thereof hardly changes. Therefore, even when the forceps 1 is inserted into a small incision site and used, it is difficult to contact the forceps or the like previously arranged, and the operability is excellent.
- FIG. 3 is a schematic explanatory view of a forceps showing another embodiment of the forceps according to the present invention.
- FIG. 3A is a schematic top view of a forceps showing an embodiment of the forceps according to the present invention
- FIG. 3B is a schematic side view of the forceps showing an embodiment of the forceps according to the present invention.
- the forceps 20 of the embodiment shown in FIG. 3 is the same as the forceps 1 shown in FIG. 1 except that the bending direction of the first bent portion A ′ in the operation portions 41a and 41b is different from that of the forceps 1 shown in FIG. 3, members having the same shape as the members shown in FIG. 1 are denoted by the same reference numerals as those shown in FIG.
- the handle portions 71a and 71b of the forceps 20 of this embodiment have a first bent of the forceps 1 shown in FIG. 1 (b) when the pair of operation portions 41a and 41b are viewed from the side.
- the first bent portion A ′ is bent similarly to the portion A. Therefore, the angle theta 1 between the first and second planes is 120 °, are bent to the opposite side to the side of inserting the finger in the ring portion at the same angle as the forceps 1 shown in FIG.
- the handle portions 71a and 71b of the forceps 20 of this embodiment are bent toward the one ring portion 6b when the pair of operation portions 41a and 41b are viewed from above. 1 is different from the handle portions 7a and 7b in the forceps 1 shown in FIG.
- a plane that is orthogonal to the first plane and that includes the central axis of the handle 71a on which the operating portion 41a and the motion transmitting portion 5a are integrally connected is a fifth plane, orthogonal to the first plane, and the plane in which the operation unit 41a and the motion transmitting portion 5a includes a center axis of the motion transmitting portion 5a of those who are connected together as a sixth plane, when the angle between the fifth plane and a sixth plane and theta 4 , the angle theta 4 is 20 °.
- the handle portions 71a and 71b are bent toward the one ring portion 6b, but may be bent toward the other ring portion 6a.
- the formed angle ⁇ 4 may be in the range of ⁇ 20 ° to 0 ° or 0 ° to 20 ° (when the forceps 20 is viewed from the upper surface, the first bent portion A ′ is the center, and the fifth plane is (Anti-clockwise angle as the axis is positive.) If the handle portions 71a and 71b are bent at an angle in the above range so as to bend toward the one ring portion 6a or 6b, the object to be clamped by the forceps 20 is shifted laterally from the incision site. Even when it is in a position where it is difficult to hold, it can be held without applying excessive force to the living tissue.
- the second bent portion B and the third bent portion C in the holding portions 3a and 3b of the forceps 1 are both bent on the side opposite to the first bent portion A, but are provided on the holding portions 3a and 3b.
- the direction in which the bent portion is bent is not particularly limited, and may be bent in any direction of 360 ° as viewed from the axial direction of the motion transmitting portions 5a and 5b, and is bent in the same direction as the first bent portion A.
- the forceps 1 may be bent so as to be bent toward one of the ring portions 6a or 6b when viewed from above.
- the number of the bent portions in the sandwiching portions 3a and 3b is not limited to two, and it is sufficient that at least one bent portion is provided.
- the operation parts 4a and 4b of the forceps 1 have the first bent part A bent to the side opposite to the finger insertion side in the ring parts 6a and 6b, but the number of the bent parts is not particularly limited. You may have two or more bending parts.
- the forceps 1 that is operated by inserting an operator's finger into the ring portions 6a and 6b of the operation portions 4a and 4b has been described.
- the forceps according to the present invention are attached to the distal end of the arm of the medical robot. It can also be used as a manipulator to be attached.
- the forceps of the present invention are used to treat living tissue in a surgical operation, for example, to clamp a blood vessel to stop hemostasis, to clamp a suture thread, a belt, or the like used to stop a blood vessel. used.
- the forceps according to the present invention hardly changes the outer shape of the motion transmitting unit when clamping the object to be clamped, and the operation unit and the clamping unit are appropriately bent. It is difficult to hurt, and does not interfere with the operation of the surgical operation and is excellent in operability. Therefore, the forceps according to the present invention is suitably used for, for example, a thrombectomy operation such as a carotid artery, which has a small incision area and performs a surgical operation in a limited space.
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Engineering & Computer Science (AREA)
- Ophthalmology & Optometry (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
Abstract
この発明の課題は、外科手術における術野で手術操作の邪魔にならず、操作性に優れ、血管等の生体組織を傷め難い鉗子を提供すること。一対の鉗子部材における一方に挟持部を、他方に操作部を、前記挟持部と前記操作部との間に運動伝達部をそれぞれ有し、前記操作部の開閉に応じて前記運動伝達部を介して前記挟持部が開閉する鉗子であって、前記操作部及び前記挟持部はそれぞれ少なくとも1つの屈曲部を有し、前記運動伝達部は、前記操作部の開閉運動を前記挟持部の開閉運動として伝達する両てこ機構を有することを特徴とする鉗子。
Description
この発明は鉗子に関し、特に外科手術の際に生体組織を処置するのに使用される鉗子に関する。
外科、特に血管縫合、血栓除去などの血管の手術においては、出血は患者に大きな負担となるため、縫合糸や止血帯による一時止血、血管を鉗子で挟むことによる止血が行われる。鉗子は血管以外にも生体組織の一部、縫合糸、及び器具等を挟持するためにも使用され、時間との闘いである外科手術において多用されている。
これまでに開発されている鉗子の1つとして、例えば、特許文献1には「腹腔や胸腔における内視鏡下手術において、経外筒的手術操作や、経肋間的手術操作において受けるハサミ構造を有する手術器具類の決定的な制限を解消し、開腹・開胸における直視下手術操作と変わらない利便性・安全性を提供するとともに、患者および医療行政の負担の軽減という経済性をも提供することを目的」(特許文献1の段落番号0004)として、「・・前記先端部を閉じたときに、前記支点と前記把持部との間で前記各柄部が交差していることを特徴とする手術用器具」(特許文献1の請求項1)が記載されている。
また、特許文献2には、狭い肛門管内部での痔核を的確に挟持し、縫合時の出血を抑える鉗子として、「・・鉗子全体が把持部の開閉方向を含む面に対して垂直平面上にゆるやかに湾曲されたことを特徴とした手術用鉗子」(特許文献2の請求項1)が記載されている。
このように、外科手術において使用される鉗子は、その使用状況等に応じて様々な形状を有する鉗子が開発されているが、患者及び医療従事者の負担を軽減し、利便性及び安全性を備えた鉗子のさらなる開発が望まれている。
例えば、頚部の血栓除去手術においては、切開した穴から体内を走行する血管を鉗子で挟持して止血する場合に、鉗子が体表から立った状態になり易いので、重力によって鉗子が体表に向かって傾倒し、血管に余分な力がかかり易くなる。血管は繊細な組織であるので、余分な力をかけると生体組織がダメージを受け、切れたり破壊したりしなくとも、内皮組織が傷ついたり、血栓が発生し易くなる。
この発明は、このような問題を解決するためになされたものであり、外科手術における術野で手術操作の邪魔にならず、操作性に優れ、血管等の生体組織を傷め難い鉗子を提供することを目的とする。
前記課題を解決するための手段は、
(1) 一対の鉗子部材における一方に挟持部を、他方に操作部を、前記挟持部と前記操作部との間に運動伝達部をそれぞれ有し、前記操作部の開閉に応じて前記運動伝達部を介して前記挟持部が開閉する鉗子であって、
前記操作部及び前記挟持部はそれぞれ少なくとも1つの屈曲部を有し、
前記運動伝達部は、前記操作部の開閉運動を前記挟持部の開閉運動として伝達する両てこ機構を形成することを特徴とする鉗子である。
(1) 一対の鉗子部材における一方に挟持部を、他方に操作部を、前記挟持部と前記操作部との間に運動伝達部をそれぞれ有し、前記操作部の開閉に応じて前記運動伝達部を介して前記挟持部が開閉する鉗子であって、
前記操作部及び前記挟持部はそれぞれ少なくとも1つの屈曲部を有し、
前記運動伝達部は、前記操作部の開閉運動を前記挟持部の開閉運動として伝達する両てこ機構を形成することを特徴とする鉗子である。
前記(1)の好適な態様としては、
(2) 前記一対の操作部を含む第1平面と前記一対の運動伝達部を含む第2平面とのなす角θ1が105~135°であり、
(3) 前記挟持部は、2つの屈曲部を有する前記(1)又は(2)に記載の鉗子であり、
(4) 前記挟持部における前記運動伝達部に隣接する第2屈曲部の曲げ角度、及び前記挟持部における前記第2屈曲部に隣接する第3屈曲部における曲げ角度がそれぞれ、105~135°であり、前記操作部の長さが40~80mm、前記挟持部における先端から前記第3屈曲部までの長さが1~5mm、前記第3屈曲部から前記第2屈曲部までの長さが0~20mmである前記(3)に記載の鉗子である。
(2) 前記一対の操作部を含む第1平面と前記一対の運動伝達部を含む第2平面とのなす角θ1が105~135°であり、
(3) 前記挟持部は、2つの屈曲部を有する前記(1)又は(2)に記載の鉗子であり、
(4) 前記挟持部における前記運動伝達部に隣接する第2屈曲部の曲げ角度、及び前記挟持部における前記第2屈曲部に隣接する第3屈曲部における曲げ角度がそれぞれ、105~135°であり、前記操作部の長さが40~80mm、前記挟持部における先端から前記第3屈曲部までの長さが1~5mm、前記第3屈曲部から前記第2屈曲部までの長さが0~20mmである前記(3)に記載の鉗子である。
この発明に係る鉗子は、前記操作部が少なくとも1つの屈曲部を有するので、従来の鉗子では体内の血管等の生体組織を挟持する際に体表から立った状態になっていた部分が、体表に沿って配置されるようになるので、血管等の生体組織に無理な力がかからないため、生体組織を傷め難く、また、鉗子が術野での手術操作の邪魔にならない。また、前記挟持部が少なくとも1つの屈曲部を有するので、体内に挿入された挟持部が無理のない姿勢で血管等の生体組織を挟持することができ、生体組織を傷め難い。さらに、前記運動伝達部は、前記操作部の開閉運動を前記挟持部の開閉運動として伝達する両てこ機構を形成することから、この開閉運動の際に前記運動伝達部の形状がほとんど変化しない、換言すると、一対の運動伝達部が互いにほとんど離隔しない状態で前記挟持部を開閉させることができるので、切開部位における限られたスペースで血管等の生体組織の挟持をする際の操作性に優れる。
以下において、図面を参照しつつこの発明に係る鉗子について説明する。図1は、この発明に係る鉗子の一実施態様を示す鉗子の概略説明図である。図1(a)は、この発明に係る鉗子の一実施態様を示す鉗子の上面概略説明図であり、図1(b)は、この発明に係る鉗子の一実施態様を示す鉗子の側面概略説明図である。
図1に示すように、この実施態様の鉗子1は、一対の鉗子部材2における一方に挟持部3a、3bを、他方に操作部4a、4bを、前記挟持部3a、3bと前記操作部4a、4bとの間に運動伝達部5a、5bをそれぞれ有し、前記操作部4a、4bの開閉に応じて前記運動伝達部5a、5bを介して前記挟持部3a、3bが開閉する。
前記鉗子部材2は、医療用の鉗子の材料として一般的に使用される材料で形成されることができ、例えば、チタン、Ti6Al4等のチタン合金、ステンレス鋼等によって形成される。
前記操作部4a、4bは、医療従事者が挟持して、一対の操作部4a、4bを開閉することにより挟持部3a、3bの開閉を行う部位である。操作部4a、4bは、指を挿入するリング状のリング部6a、6bと、このリング部6a、6bから延在する柄部7a、7bと、この柄部7a、7bのリング部6a、6b側の端部における一対の柄部7a、7bの対向する側に設けられたラチェット部8a、8bとを有する。操作部4a、4bの長さは、この鉗子の使用部位及び操作性等の観点から、40~80mmであるのが好ましく、例えば60mmである。
前記柄部7a、7bは、リング部6a、6bにおける指を挿入する側とは反対側に曲げられた第1屈曲部Aを有する。図1(b)に示すように、第1屈曲部Aにおける曲げ角度は、一対の操作部4a、4bを側面から見て、一対の操作部4a、4bにおける端部から第1屈曲部Aまでの中心軸線を含む平面を第1平面、一対の運動伝達部5a、5bの中心軸線を含む平面を第2平面として、第1平面と第2平面とのなす角θ1で表すことができ、θ1は120°である。この実施態様の鉗子1におけるなす角θ1は、120°であるが、体内の挟持対象物を挟持部3a、3bで挟持した後の鉗子1の姿勢として、リング部6a、6bが体表に沿って配置されるような角度であればよく、θ1は105°~135°であるのが好ましく、115°~125°であるのが特に好ましい。このような屈曲部のない従来の鉗子では、体内の血管等の挟持対象物を挟持したときに鉗子が体表から立った状態になってしまうことがあった。しかし、この鉗子1における前記柄部3a、3bが前記範囲の角度で、リング部6a、6bにおける指を挿入する側とは反対側に曲げられていると、操作部4a、4b特にリング部6a、6bが体表に沿って配置されるようになるので、血管等の生体組織に無理な力がかからないため、生体組織を傷め難く、また、鉗子が術野での手術操作の邪魔にならない。
前記柄部7a、7bのうちの一方の柄部7aは、図1(a)に示すように、一対の操作部4a、4bを上面から見たときに、一方の運動伝達部5aと一体となって直線状に延在している。他方の柄部7bは、他方の運動伝達部5bとは別体として所定の角度で連結している。したがって、一方の柄部7aと他方の柄部7bとラチェット部8a、8bとで三角形を形成するように、一方の柄部7aと他方の柄部7bとは運動伝達部5a、5b側の端部において所定の角度で交差している。柄部7a、7bの長さは特に限定されないが、この鉗子の使用部位及び操作性等を考慮すると、例えば20~60mmである。また、柄部7a、7bの断面形状は例えば角にRを付けた角形であり、その寸法は1.5~2.5mm×1~2mm、例えば2.0mm×1.5mmである。なお、生体組織を傷つけないように、この鉗子1の外表面の角には全てRが付けられているのがよい。
前記ラチェット部8a、8bは、血管等の挟持対象物を挟持した後に挟持部3a、3bが開閉しないように挟持部3a、3bの開き角度を位置決めすることができるように形成されている。このラチェット部8a、8bは、一方の操作部4a、4bから他方の操作部4b、4aに向かって延在し、一対の操作部4a、4bが閉じた状態のときには一対のラチェット部8a、8bは重なり合っている。ここで、一対の操作部4a、4bが閉じた状態とは、一対の操作部4a、4b特に一対の柄部7a、7bが互いに平行に接触している状態をいうのではなく、一対の操作部4a、4bが所定の角度で交差しており、一対の操作部4a、4bが互いに接近する方向に力をかけてもそれ以上その角度が小さくならない状態をいう。一対のラチェット部8a、8bが対向する面には、複数の山及び複数の谷が例えば2~10個形成されており、一方のラチェット部8a、8bに形成された山と他方のラチェット部8b、8aに形成された山と山との間の谷とが噛み合うことにより、挟持部3a、3bが挟持対象物の大きさ等に応じて特定の角度で開いた状態で固定できるようになっている。この固定された状態を解除する場合には、操作者がリング部6a、6bに指を挿入して一対の操作部4a、4bを離隔する方向に所定以上の力をかけて、ラチェット部8a、8bにおける一方の山と他方の谷との噛み合いを外すことによってする。
前記運動伝達部5a、5bは、前記操作部4a、4bの開閉運動を前記挟持部3a、3bの開閉運動として伝達する両てこ機構を形成する。前記運動伝達部5a、5bは、両てこ機構を形成するので、開閉運動の際に前記運動伝達部5a、5bの形状がほとんど変化しない、換言すると、一対の運動伝達部5a、5bが互いにほとんど離隔しない状態で前記挟持部3a、3bを開閉させることができる。患者の負担を軽減するために、通常、切開する部位の長さは最小限に抑えられる。このような切開部位に鉗子1を挿入して血管等の挟持対象物を挟持する際に、はさみと同様の機構である従来の鉗子すなわち蝶番を回動軸として鉗子部材が重ね合わされて開閉される鉗子を用いる場合には、蝶番を中心にして一対の鉗子部材が扇状に開閉されるので、その開閉幅の分だけスペースを必要とする。特に挟持対象物が体表から体内の奥深くに存在する場合には、蝶番から後端側に延在する柄部が長くなるので、その分だけ開閉幅も大きくなり、他の鉗子及び切開部位への接触等により操作性が悪くなり易い。一方、この鉗子1は操作部4a、4bを開閉する際に一対の運動伝達部5a、5bの形状がほとんど変化しないので、切開された開口面積が小さくてもそこから挟持部3a、3bを挿入して、容易に挟持対象物を挟持することができ、操作性に優れる。
図2は、運動伝達部を拡大して示す要部概略図であり、図2(a)は、挟持部が閉じている状態のときの運動伝達部を示し、図2(b)は、挟持部が開いている状態のときの運動伝達部を示す。
図2(a)及び(b)に示すように、一方の運動伝達部5bと他方の運動伝達部5aとは、一方の操作部4bの先端にある第1リンク9と他方の挟持部3aの基端にある第2リンク10とにより第1ピン11から第4ピン14までの4つのピンを介して連結されている。この運動伝達部5a、5bにおいては、第1リンク11と第2リンク12とがてことして作用し、一方の運動伝達部5bが固定リンクとして作用して、両てこ機構を形成している。図2(a)に示すように、一対の挟持部3a、3bが互いに接触して閉じている場合には、第1ピン11、第2ピン12、第3ピン13、第4ピン14、及び第1ピン11の順にそれぞれの間を結ぶ仮想線Lは平行四辺形を形成している。図2(b)に示すように、一対の挟持部3a、3bが互いに離れて開いている場合には、前記仮想線Lは長方形に近似する形状となり、一対の運動伝達部5a、5bの間が僅かに、例えば0.1~0.5mm離隔する。このように、挟持部3a、3bの開閉によって運動伝達部5a、5bの外形はほとんど変化することがない。
運動伝達部5a、5bの断面形状及びその太さは、柄部7a、7bに近似する形状及び太さとすることができ、その長さは、鉗子の使用部位及び操作性の観点から、15~50mmであるのが好ましく、例えば25mmである。
以下にこの実施態様の両てこ機構について、より詳細に説明する。
一方の運動伝達部5bは、一方の挟持部5bと直線状に一体に連結され、固定リンクとして作用する。この運動伝達部5bと一方の操作部4bの端部にある第1リンク9とは第1ピン11を介して連結され、一方の操作部4bは第1ピン11を中心にして回動する。第1リンク9の第1ピン11とは反対側の端部は、第2ピン12を介して他方の運動伝達部5aに連結され、一方の操作部4bの回動に応じて他方の運動伝達部5aが応動する。他方の運動伝達部5aは他方の操作部4aと直線状に一体に連結され、他方の挟持部3aの基端にある第2リンク10とは第3ピン13を介して連結されている。第2リンク10の第3ピン13とは反対側の端部は、第4ピン14を介して一方の運動伝達部5bに連結されている。一方の操作部4bの回動に伴って第1リンク9に第2ピン12を介して連結した他方の運動伝達部5aが応動すると、この応動に伴って第2リンク10が応動することにより、他方の挟持部3aが第4ピン14を中心にして回動する。
一方の運動伝達部5bは、一方の挟持部5bと直線状に一体に連結され、固定リンクとして作用する。この運動伝達部5bと一方の操作部4bの端部にある第1リンク9とは第1ピン11を介して連結され、一方の操作部4bは第1ピン11を中心にして回動する。第1リンク9の第1ピン11とは反対側の端部は、第2ピン12を介して他方の運動伝達部5aに連結され、一方の操作部4bの回動に応じて他方の運動伝達部5aが応動する。他方の運動伝達部5aは他方の操作部4aと直線状に一体に連結され、他方の挟持部3aの基端にある第2リンク10とは第3ピン13を介して連結されている。第2リンク10の第3ピン13とは反対側の端部は、第4ピン14を介して一方の運動伝達部5bに連結されている。一方の操作部4bの回動に伴って第1リンク9に第2ピン12を介して連結した他方の運動伝達部5aが応動すると、この応動に伴って第2リンク10が応動することにより、他方の挟持部3aが第4ピン14を中心にして回動する。
第1リンク9は、柄部7bに対して所定の角度で傾斜して設けられ、第2リンク10は挟持部3aに対して所定の角度で傾斜して設けられている。第1リンク9と第2リンク10とは、図2(a)に示すように、運動伝達部5a及び5bの幅を合計した長さよりも僅かに長い。したがって、挟持部3a、3bが閉じている状態のときには、一対の運動伝達部5a、5bは互いに接触し、第1リンク9と第2リンク10とは運動伝達部5a及び5bの長手方向に直交する方向から所定の角度で傾斜するように配置されて、第1リンク9と第2リンク10とは、運動伝達部5a及び5bの幅方向からはみ出さないように形成されている。また、図2(b)に示すように、挟持部3a、3bが開いた状態のときには、第1リンク9と第2リンク10とが運動伝達部5a、5bに対して略直交する方向に配置され、第1リンク9と第2リンク10とが運動伝達部5a及び5bの幅方向からはみ出さずに、運動伝達部5a、5bが互いに僅かに離隔するように形成されている。
前記挟持部3a、3bは、生体内の血管等の生体組織、縫合糸、器具等を挟持する。前記挟持部3a、3bは、前述したように、操作部4a、4bの開閉運動が運動伝達部5a、5bを介して伝達されて開閉する。換言すると、一方の操作部4bの回動運動が両てこ機構により他方の挟持部3aの回動運動として伝達されて、挟持部3a、3bが開閉する。
前記挟持部3a、3bは、運動伝達部5a、5bに隣接し、第1屈曲部Aとは反対側に曲げられた第2屈曲部Bと、この第2屈曲部Bに隣接し、第2屈曲部Bと同じ方向に曲げられた第3屈曲部Cとを有する。図1(b)に示すように、第2屈曲部Bにおける曲げ角度は、鉗子1を側面から見て、一対の運動伝達部5a、5bの中心軸線を含む平面を第2平面、一対の挟持部3a、3bにおける第2屈曲部Bから第3屈曲部Cまでの間の中心軸線を含む平面を第3平面として、第2平面と第3平面とのなす角θ2で表すことができ、θ2は120°である。この実施態様の鉗子1におけるなす角θ2は、120°であるが、体内の挟持対象物を無理のない姿勢で挟持することのできる角度であればよく、θ2は105°~135°であるのが好ましく、115°~125°であるのが特に好ましい。また、第3屈曲部Cにおける曲げ角度は、鉗子1を側面から見て、一対の挟持部3a、3bにおける第3屈曲部Cから先端までの間の中心軸線を含む平面を第4平面として、第3平面と第4平面とのなす角θ3で表すことができ、θ3は120°である。この実施態様の鉗子1におけるなす角θ3は、体内の挟持対象物を無理のない姿勢で挟持することのできる角度であればよく、θ3は105°~135°であるのが好ましく、115°~125°であるのが特に好ましい。この鉗子1における前記挟持部3a、3bが前記範囲の角度で曲げられていると、生体内の血管等の生体組織を無理のない姿勢で挟持することができるので、血管等の生体組織に無理な力がかからず、生体組織を傷め難い。なお、上述した第1屈曲部A、第2屈曲部B、及び第3屈曲部Cは、いずれも適度な曲げ半径で曲げられている。
前記挟持部3a、3bの長さは特に限定されないが、例えば、挟持部3a、3bの先端から第3屈曲部Cまでの長さが1~5mm、例えば3mmであり、第3屈曲部Cから第2屈曲部Bまでの長さが0~20mm、特に1~10mm、例えば10mmであり、第2屈曲部Bから運動伝達部5a、5bと連結している端部までの長さが1~10mm、例えば5mmである。前記挟持部3a、3bの外周面は、適度な丸みを有し、生体組織を傷つけないように形成されているのがよい。挟持部3a、3bの太さは、例えば柄部7a、7bよりも細く、先端に向かって次第に細くなるように形成されており、例えば、挟持部3a、3bの長手方向の中心付近における断面は0.8~1.8×0.5~1.5mm、例えば1.3mm×1.0mmである。
また、一対の挟持部3a、3bが対向する対向面は、平面であってもよいし、挟持対象物を挟持したときに挟持対象物を傷つけずに適度な摩擦力で確実に挟持対象物を挟むことができる程度の凹凸が形成されていてもよい。
次に、この実施態様の鉗子の使用状態について説明する。
操作者がリング部6a、6bに指を挿入して鉗子1を把持し、一対の操作部4a、4bが離隔する方向に力をかけると、噛み合っていたラチェット部8a、8bが外れて、一方の操作部4bが第1ピン11を中心にして他方の操作部4aから離れる方向に回動する。図2(a)及び(b)に示すように、一方の操作部4bの回動に伴って、操作部4bに対して傾斜して配置されていた第1リンク9が第1ピンを中心にして運動伝達部5a及び5bの長手方向に直交する方向に近づくように回動し、この第1リンク9の回動に伴って、第1リンク9に第2ピン12を介して連結した他方の運動伝達部5aが応動し、この応動に伴って第2リンク10が第4ピンを中心にして運動伝達部5a及び5bの長手方向に直交する方向に近づくように回動することにより、この第2リンク10に一体に連結している他方の挟持部3aが第4ピン14を中心にして一方の挟持部3bから離れる方向に回動する。
操作者がリング部6a、6bに指を挿入して鉗子1を把持し、一対の操作部4a、4bが離隔する方向に力をかけると、噛み合っていたラチェット部8a、8bが外れて、一方の操作部4bが第1ピン11を中心にして他方の操作部4aから離れる方向に回動する。図2(a)及び(b)に示すように、一方の操作部4bの回動に伴って、操作部4bに対して傾斜して配置されていた第1リンク9が第1ピンを中心にして運動伝達部5a及び5bの長手方向に直交する方向に近づくように回動し、この第1リンク9の回動に伴って、第1リンク9に第2ピン12を介して連結した他方の運動伝達部5aが応動し、この応動に伴って第2リンク10が第4ピンを中心にして運動伝達部5a及び5bの長手方向に直交する方向に近づくように回動することにより、この第2リンク10に一体に連結している他方の挟持部3aが第4ピン14を中心にして一方の挟持部3bから離れる方向に回動する。
次いで、血管等の挟持対象物を一対の挟持部3a、3bの間に配置されるようする。挟持部3a、3bは第2屈曲部Bと第3屈曲部Cとを有するので、例えば、生体内の挟持し難い場所に配置された血管であっても、血管及びその周辺組織に無理な力をかけないように、一対の挟持部3a、3bの間に血管を配置することができる。
操作者が一対の操作部4a、4bが互いに近接する方向に力をかけると、一方の操作部4bが第1ピン11を中心にして他方の操作部4aに接近する方向に回動する。一方の操作部4bの回動に伴って、第1リンク9に第2ピン12を介して連結した他方の運動伝達部5aが応動し、この応動に伴って第2リンク10が応動することにより、他方の挟持部3aが第4ピン14を中心にして一方の挟持部3bに接近する方向に回動する。
一方の操作部4bが他方の操作部4aに向かって回動するにしたがって、一対のラチェット部8a、8bの重なり面積が増加し、それに従って一方のラチェット部8aに形成された山と他方のラチェット部8bに形成された谷との噛み合いの数が増加する。一対の挟持部3a、3bが血管等の挟持対象物を適度な押圧力で挟持したところで、一方の操作部4bの回動を止めると、一対のラチェット部8a、8bにおける複数の山と複数の谷とが噛み合うことにより、操作部4b及び挟持部3aが容易に回動することのないように固定される。
鉗子1で挟持対象物を挟持した後に、操作者がリング部6a、6bから指を抜くと、操作部4a、4bが第1屈曲部Aを有することから、切開部位に挿入された運動伝達部5a、5bから操作部4a、4bが体表に対して立った状態にならずに、操作部4a、4bにおけるリング部6a、6bは体表に沿って配置される。したがって、その後の手術操作においてこの鉗子1が術者の手に接触することがなく、邪魔にならない。また、リング部6a、6bが体表に沿って配置されているので、重力にしたがってリング部6a、6bが傾倒する等その姿勢を大きく変えることがないので、挟持対象物やその周辺組織に無理な力がかからず、生体組織を傷め難い。
これら一連の操作部4a、4bと挟持部3a、3bとの開閉運動において一対の運動伝達部5a、5bは僅かに離隔するだけで、ほとんどその外形が変化しない。したがって、小さな切開部位に鉗子1を挿入して使用する場合であっても、先に配置された鉗子等に接触し難く、操作性に優れる。
次に、この発明の鉗子の第2の実施態様について説明する。
図3は、この発明に係る鉗子の他の実施態様を示す鉗子の概略説明図である。図3(a)は、この発明に係る鉗子の一実施態様を示す鉗子の上面概略説明図であり、図3(b)は、この発明に係る鉗子の一実施態様を示す鉗子の側面概略説明図である。
図3は、この発明に係る鉗子の他の実施態様を示す鉗子の概略説明図である。図3(a)は、この発明に係る鉗子の一実施態様を示す鉗子の上面概略説明図であり、図3(b)は、この発明に係る鉗子の一実施態様を示す鉗子の側面概略説明図である。
図3に示す実施態様の鉗子20は、操作部41a、41bにおける第1屈曲部A’の曲がる方向が図1に示す鉗子1とは異なること以外は図1に示す鉗子1と同様である。図3においては、図1に示した部材と同様の形状を有する部材については、図1に示した符号と同じ符号を用いて示す。
図3(b)に示すように、この実施態様の鉗子20における柄部71a、71bは、一対の操作部41a、41bを側面から見ると、図1(b)に示す鉗子1の第1屈曲部Aと同様に屈曲した第1屈曲部A’を有している。したがって、第1平面と第2平面とのなす角θ1は120°であり、図1に示す鉗子1と同じ角度でリング部における指を挿入する側とは反対側に曲がっている。
一方、図3(a)に示すように、この実施態様の鉗子20における柄部71a、71bは、一対の操作部41a、41bを上面から見たときに、一方のリング部6b側へ屈曲するように曲げられている点で図1に示す鉗子1における柄部7a、7bとは異なっている。前記第1平面に直交し、かつ操作部41aと運動伝達部5aとが一体に連結している方の柄部71aの中心軸線を含む平面を第5平面、前記第1平面に直交し、かつ操作部41aと運動伝達部5aとが一体に連結している方の運動伝達部5aの中心軸線を含む平面を第6平面として、第5平面と第6平面とのなす角をθ4とすると、なす角θ4は20°である。なお、この実施態様の鉗子20は、柄部71a、71bが一方のリング部6b側へ曲げられているが、他方のリング部側6aへ曲げられていてもよい。また、なす角θ4は、-20°~0°又は0°~20°の範囲であってもよい(鉗子20を上面から見たときに第1屈曲部A’を中心、第5平面を軸として反時計回りの角度を正とする。)。前記柄部71a、71bが前記範囲の角度で、一方のリング部6a又は6b側へ屈曲するように曲げられていると、鉗子20で挟持する挟持対象物が切開部位から横方向にずれていて挟持し難い位置にある場合であっても生体組織に無理な力をかけずに挟持することができる。
なお、この発明の鉗子は、前述した実施態様に限定されず、この発明の課題を達成することができる限り、種々の変更が可能である。
例えば、鉗子1の挟持部3a、3bにおける第2屈曲部B及び第3屈曲部Cは、いずれも第1屈曲部Aとは反対側に曲げられているが、挟持部3a、3bに設けられた屈曲部の曲げられる方向は特に限定されず、運動伝達部5a、5bの軸線方向から見て、360°いずれの方向に曲げられていてもよく、第1屈曲部Aと同じ方向に曲げられていてもよいし、鉗子1を上面から見たときに、いずれか一方のリング部6a又は6b側へ屈曲するように曲げられていてもよい。また、挟持部3a、3bにおける屈曲部の数は2つに限らず、少なくとも1つ設けられていればよい。
また、鉗子1の操作部4a、4bは、リング部6a、6bにおける指を挿入する側とは反対側に曲げられた第1屈曲部Aを有するが、屈曲部の数は特に限定されず、2つ以上の屈曲部を有していてもよい。
また、前記実施態様では、操作者の指を操作部4a、4bのリング部6a、6bに挿入して操作する鉗子1について説明したが、この発明の鉗子は、医療用ロボットのアームの先端に装着されるマニピュレータとして用いることもできる。
この発明の鉗子は、外科手術において生体組織を処置するのに使用され、例えば血管を挟持して止血したり、血管を止血するのに使用される縫合糸及びベルト等を挟持したりするのに使用される。この発明の鉗子は、挟持対象物を挟持する際に、運動伝達部の外形がほとんど変化せず、また、操作部と挟持部とが適度に曲がっているので、前述したように、生体組織を傷め難く、また、手術操作の邪魔にならず、操作性に優れている。したがって、この発明の鉗子は、例えば切開面積が小さく、限られたスペースで手術操作をする、頸動脈等の血栓除去術等に好適に使用される。
1、20 鉗子
2 鉗子部材
3a、3b 挟持部
4a、4b 操作部
5a、5b 運動伝達部
6a、6b リング部
7a、7b、71a、71b 柄部
8a、8b ラチェット部
9 第1リンク
10 第2リンク
11 第1ピン
12 第2ピン
13 第3ピン
14 第4ピン
2 鉗子部材
3a、3b 挟持部
4a、4b 操作部
5a、5b 運動伝達部
6a、6b リング部
7a、7b、71a、71b 柄部
8a、8b ラチェット部
9 第1リンク
10 第2リンク
11 第1ピン
12 第2ピン
13 第3ピン
14 第4ピン
Claims (4)
- 一対の鉗子部材における一方に挟持部を、他方に操作部を、前記挟持部と前記操作部との間に運動伝達部をそれぞれ有し、前記操作部の開閉に応じて前記運動伝達部を介して前記挟持部が開閉する鉗子であって、
前記操作部及び前記挟持部はそれぞれ少なくとも1つの屈曲部を有し、
前記運動伝達部は、前記操作部の開閉運動を前記挟持部の開閉運動として伝達する両てこ機構を形成することを特徴とする鉗子。 - 前記一対の操作部を含む第1平面と前記一対の運動伝達部を含む第2平面とのなす角θ1が105~135°である請求項1に記載の鉗子。
- 前記挟持部は、2つの屈曲部を有する請求項1又は2に記載の鉗子。
- 前記挟持部における前記運動伝達部に隣接する第2屈曲部の曲げ角度、及び前記挟持部における前記第2屈曲部に隣接する第3屈曲部における曲げ角度がそれぞれ、105~135°であり、前記操作部の長さが40~80mm、前記挟持部における先端から前記第3屈曲部までの長さが1~5mm、前記第3屈曲部から前記第2屈曲部までの長さが0~20mmである請求項3に記載の鉗子。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014554065A JPWO2014103095A1 (ja) | 2012-12-27 | 2013-07-25 | 鉗子 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012-284292 | 2012-12-27 | ||
| JP2012284292 | 2012-12-27 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2014103095A1 true WO2014103095A1 (ja) | 2014-07-03 |
Family
ID=51020238
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2013/004527 WO2014103095A1 (ja) | 2012-12-27 | 2013-07-25 | 鉗子 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2014103095A1 (ja) |
| WO (1) | WO2014103095A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103536340A (zh) * | 2013-10-29 | 2014-01-29 | 乔彬 | 一种用于心外科微创手术的腔静脉分离钳 |
| CN104323862A (zh) * | 2014-11-24 | 2015-02-04 | 江苏芸迪医疗科技发展有限公司 | 单孔双关节医疗器械 |
| CN108403186A (zh) * | 2018-03-07 | 2018-08-17 | 上手金钟手术器械江苏有限公司 | 一种医用弯杆钳 |
| CN112203591A (zh) * | 2018-10-26 | 2021-01-08 | 怡忠生命科学有限公司 | 血管打孔器 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59114108U (ja) * | 1983-01-21 | 1984-08-01 | 国崎 拓 | 結「さつ」用鉗子 |
| JPH09266911A (ja) * | 1996-04-01 | 1997-10-14 | Shizuka Kaseda | 鉗 子 |
| JP2001245893A (ja) * | 2000-03-03 | 2001-09-11 | Jms Co Ltd | 手術用鉗子 |
| US20070032810A1 (en) * | 2004-02-25 | 2007-02-08 | Martin Storz | Medical cutting and/or holding instrument |
| JP2008536568A (ja) * | 2005-04-13 | 2008-09-11 | シンセス・ゲゼルシヤフト・ミツト・ベシユレンクテル・ハフツング | 鉗子及びそれを用いたシステム |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6878110B2 (en) * | 2002-01-14 | 2005-04-12 | Seung Choul Yang | Surgical instruments and method for creating anatomic working space in minilaparotomy procedure |
| JP2007510461A (ja) * | 2003-11-05 | 2007-04-26 | アプライド メディカル リソーシーズ コーポレイション | 多角度はさみブレード |
-
2013
- 2013-07-25 WO PCT/JP2013/004527 patent/WO2014103095A1/ja active Application Filing
- 2013-07-25 JP JP2014554065A patent/JPWO2014103095A1/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59114108U (ja) * | 1983-01-21 | 1984-08-01 | 国崎 拓 | 結「さつ」用鉗子 |
| JPH09266911A (ja) * | 1996-04-01 | 1997-10-14 | Shizuka Kaseda | 鉗 子 |
| JP2001245893A (ja) * | 2000-03-03 | 2001-09-11 | Jms Co Ltd | 手術用鉗子 |
| US20070032810A1 (en) * | 2004-02-25 | 2007-02-08 | Martin Storz | Medical cutting and/or holding instrument |
| JP2008536568A (ja) * | 2005-04-13 | 2008-09-11 | シンセス・ゲゼルシヤフト・ミツト・ベシユレンクテル・ハフツング | 鉗子及びそれを用いたシステム |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103536340A (zh) * | 2013-10-29 | 2014-01-29 | 乔彬 | 一种用于心外科微创手术的腔静脉分离钳 |
| CN104323862A (zh) * | 2014-11-24 | 2015-02-04 | 江苏芸迪医疗科技发展有限公司 | 单孔双关节医疗器械 |
| CN108403186A (zh) * | 2018-03-07 | 2018-08-17 | 上手金钟手术器械江苏有限公司 | 一种医用弯杆钳 |
| CN112203591A (zh) * | 2018-10-26 | 2021-01-08 | 怡忠生命科学有限公司 | 血管打孔器 |
| KR20210084342A (ko) * | 2018-10-26 | 2021-07-07 | 3알 인터내셔널 씨오 엘티디 | 혈관 펀치 |
| EP3870072A4 (en) * | 2018-10-26 | 2022-05-18 | 3R Life Sciences Corporation | VASCULAR PUNCH |
| KR102647635B1 (ko) | 2018-10-26 | 2024-03-14 | 3알 라이프 사이언스 코퍼레이션 | 혈관 펀치 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2014103095A1 (ja) | 2017-01-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3179952B1 (en) | Robotically controlled mechanical advantage gripper | |
| AU2015302216B2 (en) | Robotically controlling mechanical advantage gripping | |
| JP2017526444A (ja) | 操縦可能器具用のトルク伝達操縦機構 | |
| EP0598607A2 (en) | Atraumatic endoscopic apparatus | |
| JP2007511248A5 (ja) | ||
| WO2014103095A1 (ja) | 鉗子 | |
| EP2939618B1 (en) | Surgical instrument | |
| US11311305B2 (en) | Surgical instruments with coupling members to effect multiple pivot axes | |
| JP2022544973A (ja) | 嚢開創器 | |
| US20230277192A1 (en) | Actuator handle for surgical tools | |
| CN214712692U (zh) | 手术抓钳 | |
| JP2012232066A (ja) | クリップ操作用鉗子,クリップ着脱用鉗子及びクリップ並びにこれらで構成される内視鏡下外科手術器具セット | |
| US20050043582A1 (en) | Surgical instrument having an increased range of motion | |
| KR20140134360A (ko) | 수술용 장치 및 이를 구비하는 수술용 로봇 | |
| JP2018000340A (ja) | 生体組織把持機構 | |
| JP6111320B2 (ja) | 生体内導入器具 | |
| JP4059579B2 (ja) | 外科手術用器具 | |
| US20190223897A1 (en) | Surgical instrument including flat and curved handle surfaces | |
| CN215384231U (zh) | 一种用于妇产科腹腔镜手术的标本夹取钳 | |
| JP2021122312A (ja) | 医療用器具 | |
| WO2019192067A1 (zh) | 一种外科手持器械及其使用方法 | |
| JP2016137029A (ja) | 外科手術用器具 | |
| KR102202030B1 (ko) | 수술용 로봇 시스템의 조작 장치 | |
| JP6310051B1 (ja) | 医療用器具 | |
| JP2001245893A (ja) | 手術用鉗子 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 13866672 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2014554065 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 13866672 Country of ref document: EP Kind code of ref document: A1 |