WO2013136519A1 - 信号処理装置及び情報再生装置 - Google Patents
信号処理装置及び情報再生装置 Download PDFInfo
- Publication number
- WO2013136519A1 WO2013136519A1 PCT/JP2012/056918 JP2012056918W WO2013136519A1 WO 2013136519 A1 WO2013136519 A1 WO 2013136519A1 JP 2012056918 W JP2012056918 W JP 2012056918W WO 2013136519 A1 WO2013136519 A1 WO 2013136519A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- signal
- signal processing
- filter
- processing unit
- information recording
- Prior art date
Links
Images

























Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/10009—Improvement or modification of read or write signals
- G11B20/10046—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/10009—Improvement or modification of read or write signals
- G11B20/10268—Improvement or modification of read or write signals bit detection or demodulation methods
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/004—Recording, reproducing or erasing methods; Read, write or erase circuits therefor
- G11B7/005—Reproducing
Definitions
- the embodiment relates to signal processing for a reproduction signal of an optical recording medium.
- an optical recording medium can record a large volume of data as the density and the number of layers increase.
- non-linear noise components for example, up and down asymmetric components
- Nonlinear noise components remaining in the reproduction signal may cause bit errors and hinder reproduction of user data.
- an optical recording medium reproducing apparatus uses, for example, an FIR (Finite Impulse Response) filter in order to suppress a noise component remaining in a reproduced signal.
- FIR Finite Impulse Response
- non-linear equalization processing for the reproduction signal.
- Various filters have been proposed to implement nonlinear equalization processing.
- a neural network filter a Volterra filter, an ARML (Auto Regressive Maximum Likelihood) filter, a decision feedback ML filter, and the like can realize nonlinear equalization processing.
- Embodiments are intended to effectively suppress non-linear noise components remaining in a reproduction signal from an optical recording medium.
- the information reproducing apparatus includes a first signal processing unit, a second signal processing unit, and a third signal processing unit.
- the first signal processing unit suppresses an offset component remaining in the reproduction signal read from the optical recording medium, and obtains a first signal.
- the second signal processing unit suppresses the nonlinear distortion component remaining in the first signal and obtains the second signal.
- the third signal processing unit suppresses the correlation noise component remaining in the second signal and obtains a third signal.
- FIG. 2 is a block diagram illustrating a reproduction signal processing unit in the information recording / reproducing apparatus according to the first embodiment.
- the figure which illustrates the offset suppression part of FIG. FIG. 3 is a trellis diagram for explaining the operation of the ARML filter of FIG. 1.
- the block diagram which illustrates the noise estimator of FIG. 2 is a diagram illustrating specifications of an optical recording medium that can be read by the information recording / reproducing apparatus according to the first embodiment.
- the graph which shows the channel bit error rate characteristic with respect to a tangential tilt at the time of applying a 1st comparison system, a 2nd comparison system, and a 3rd comparison system The graph which shows the channel bit error rate characteristic with respect to tangential tilt at the time of applying a 1st comparison system and a proposal system.
- FIG. 10 is a graph showing channel bit error rate characteristics with respect to recording power error when the first comparison method, the second comparison method, and the third comparison method are applied.
- the graph which shows the channel bit error rate characteristic with respect to recording power error at the time of applying a 1st comparison system and a proposal system.
- the table which shows the system margin regarding a tangential tilt at the time of applying a 1st comparison system, a 2nd comparison system, a 3rd comparison system, and a proposal system, a recording pulse width, and recording power.
- FIG. 12A is a cross-sectional view taken along line A-A ′ of FIG.
- 9 is a flowchart illustrating a data recording process performed by the information recording / reproducing apparatus according to the second embodiment.
- 9 is a flowchart illustrating a data reproduction process performed by the information recording / reproducing apparatus according to the second embodiment.
- the information recording / reproducing apparatus can process a reproduced signal read from an optical recording medium.
- the information recording / reproducing apparatus according to the present embodiment can include a reproduction signal processing unit shown in FIG. 1 in order to process a reproduction signal.
- the reproduction signal processing unit in FIG. 1 effectively suppresses non-linear noise components remaining in the reproduction signal from the optical recording medium. Specifically, the reproduction signal processing unit sequentially performs offset component suppression processing, nonlinear distortion component suppression processing, and correlation noise component suppression processing.
- the reproduction signal processing unit includes a band pass filter 100, an offset canceller 110, an AGC (Auto Gain Controller) 120, an ITR (Interpolated Timing Recovery) 121, and a PLL (Phase Locked Loop) 122.
- the band pasta filter 100 and the offset canceller 110 function as an offset suppression unit.
- the Volterra filter 130 and the tap controller 140 function as a nonlinear distortion suppression unit.
- the ARML filter 150 and the noise estimator 160 function as a correlation noise suppression unit.
- the ITR 121 and the PLL 122 function as a synchronization processing unit.
- the offset suppression unit suppresses an offset component remaining in the input signal by performing signal processing that brings the center level of the input signal close to zero.
- the bandpass filter 100 inputs a reproduction signal read from an optical recording medium (not shown).
- the band pass filter 100 allows a signal component in a desired band of the input reproduction signal to pass and suppresses a signal component outside the band.
- the band pass filter 100 outputs the filtered signal to the offset canceller 110.
- the band pass filter 100 can be implemented using an IIR (Infinite Impulse Response) filter or an FIR filter.
- the band pass filter 100 may be replaced with a high pass filter.
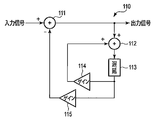
- the offset canceller 110 inputs a signal from the band pass filter 100. Offset canceller 110 suppresses the offset component remaining in the input signal, and outputs the offset-suppressed signal to AGC 120. Specifically, the offset canceller 110 can suppress the offset component of the input signal by subtracting the DC component of the input signal from the input signal.
- the offset canceller 110 includes a subtractor 111, an adder 112, a delay device 113, and amplifiers 114 and 115, for example, as shown in FIG.
- the control band of the offset canceller 110 in FIG. 2 can be adjusted via the gains of the amplifiers 114 and 115.
- the subtractor 111 obtains an output signal by subtracting the signal fed back from the amplifier 115 from the input signal.
- the adder 112 adds the output signal from the subtractor 111 and the signal fed back from the amplifier 114 and outputs the result to the delay unit 113.
- the delay unit 113 inputs a signal from the adder 112 and gives a delay.
- the delay device 113 outputs the delayed signal to the amplifiers 114 and 115.
- the amplifier 114 receives the delayed signal from the delay unit 113, adjusts the amplitude according to the gain, and feeds it back to the adder 112.
- the amplifier 115 receives the delayed signal from the delay unit 113, adjusts the amplitude according to the gain, and feeds it back to the subtractor 111.
- the AGC 120 inputs the signal whose offset is suppressed from the offset suppression unit.
- the AGC 120 automatically adjusts the amplitude of the input signal so that the amplitude approaches the desired value.
- the AGC 120 outputs the amplitude-adjusted signal to the synchronization processing unit.
- the synchronization processing unit inputs a signal whose amplitude has been adjusted from the AGC 120.
- the synchronization processing unit adjusts the temporal variation of the frequency in the input signal.
- the synchronization processing unit outputs the signal subjected to the synchronization processing to the nonlinear distortion suppression unit.
- the Volterra filter 130 in the nonlinear distortion suppression unit suppresses nonlinear distortion components (for example, vertical asymmetry of the waveform) remaining in the input signal. Further, the tap controller 140 of the nonlinear distortion suppression unit dynamically updates the tap coefficient of the Volterra filter 130. Therefore, even if the non-linear distortion component remaining in the input signal fluctuates with time, the non-linear distortion suppression unit can stably suppress the non-linear distortion component. As described above, the nonlinear distortion suppression unit inputs the signal whose offset is suppressed. Therefore, it is possible to prevent a waveform shift due to an offset component from being erroneously suppressed as a vertically asymmetric component. In addition, the Volterra filter 130 can be stably adaptively controlled by setting the control band of the Volterra filter 130 of the nonlinear distortion suppression unit to a low control band of the offset suppression unit.
- the Volterra filter 130 receives the signal subjected to the synchronization processing from the synchronization processing unit.
- the Volterra filter 130 performs Volterra filter processing on the input signal, and outputs the filtered signal to the tap controller 140 and the correlation noise suppression unit.
- the Volterra filter 130 includes a filter arithmetic unit 131 for the first-order term, a filter arithmetic unit 132 for the second-order term, and a filter arithmetic unit 133 for the third-order term. it can. That is, the Volterra filter 130 in FIG. 1 can perform the third-order filter processing.
- the Volterra filter 130 can perform the filter processing represented by the following mathematical formula (1).
- Equation (1) the first term on the right side represents a primary filter operation (that is, a linear filter operation), the second term on the right side represents a secondary filter operation, and the third term on the right side represents a tertiary filter operation.
- the linear filter operation corresponds to normal FIR filter processing. According to the filter processing of Equation (1), higher-order distortion components can be suppressed in addition to the second-order distortion components (for example, waveform asymmetry).
- x (t) represents an input signal of the Volterra filter 130
- y (t) represents an output signal of the Volterra filter 130.
- h 1 represents a tap coefficient for linear filter operation
- h 2 represents a tap coefficient for secondary filter operation
- h 3 represents a tap coefficient for tertiary filter operation.
- t represents the sample timing.
- t ′ and t ′′ represent sample timings in which delays related to the second-order filter operation and the third-order filter operation are compensated.
- i is a variable for specifying a tap number in the linear filter calculation
- I represents a tap length in the linear filter calculation.
- j and k are variables for specifying the tap number in the secondary filter calculation
- J and K represent the tap length in the secondary filter calculation.
- J and K may be the same value or different values.
- f, g, and h are variables that specify the tap number in the third-order filter calculation, and F, G, and H represent the tap length in the third-order filter calculation. F, G, and H may be the same value or different values.
- the tap controller 140 updates the tap coefficient used by the Volterra filter 130.
- the tap controller 140 sequentially outputs the updated tap coefficient to the volterra filter 130.
- the tap controller 140 includes a tap coefficient calculator 141 for linear filter calculation, a tap coefficient calculator 142 for secondary filter calculation, and a tap coefficient for tertiary filter calculation. And a calculator 143.
- the tap controller 140 updates the tap coefficient according to the following mathematical formula (2).
- Equation (2) ⁇ 1 represents a step size parameter for linear filter operation, ⁇ 2 represents a step size parameter for secondary filter operation, and ⁇ 3 represents a step size parameter for tertiary filter operation. Represents. Note that the control band of the Volterra filter 130 can be adjusted via a step size parameter.
- Formula (2) is based on the LMS (Least Mean Square) method.
- the tap controller 140 may update the tap coefficient based on a technique other than the LMS.
- the noise estimator 160 in the correlation noise suppressing unit estimates a correlation noise component remaining in the input signal based on an AR (Auto-Regressive) model.
- the ARML filter 150 suppresses the correlation noise component remaining in the input signal.
- the noise estimator 160 is based on the assumption that white noise previously mixed in the input signal is converted into a correlation noise component and added to the input signal. Therefore, if the nonlinear distortion component as the colored noise is not sufficiently suppressed in the input signal, the estimation accuracy of the correlation noise component by the noise estimator 160 deteriorates, and as a result, the ARML filter 150 may not function effectively. .
- the correlation noise suppression unit inputs a signal in which nonlinear distortion is suppressed. Therefore, it is possible to prevent the nonlinear distortion component from adversely affecting the estimation of the correlation noise component.
- the ARML filter 150 can be adaptively controlled stably.
- the ARML filter 150 is an ML filter that can effectively suppress the correlation noise expressed by the AR model.
- noise autocorrelation is assumed.
- the ARML filter 150 performs equalization not on linear white noise but on colored noise having a different intensity for each input signal pattern and temporal correlation. Therefore, even if a noise component having a pattern dependency or a noise component having temporal correlation remains in the input signal, the ARML filter 150 can effectively suppress the noise component.
- the ML filter is realized based on Viterbi algorithm, BCJR (Bahl-Cocke-Jelinek-Raviv) algorithm, MLM (Max-Log-Map) algorithm, SOVA (Soft Output Viterbi Algorithm), or the like.
- an error correction process for example, a Reed-Solomon code decoding process
- the ML filter outputs the hard decision result Based on an algorithm (for example, a Viterbi equalization algorithm).
- the ML filter when an error correction process (for example, LDPC (Low Density Parity Check) code decoding process) is performed on the soft decision result after the ML filter, the ML filter outputs an algorithm (for example, BCJR). Algorithm, MLM algorithm or SOVA algorithm).
- an error correction process for example, LDPC (Low Density Parity Check) code decoding process
- the ML filter outputs an algorithm (for example, BCJR). Algorithm, MLM algorithm or SOVA algorithm).
- the ARML filter 150 calculates a likelihood index called a metric for each branch and determines the most probable path based on the metric, thereby obtaining a hard decision result or a soft decision result of the reproduction signal.
- the ARML filter 150 outputs the hard decision result or the soft decision result of the reproduction signal to the noise estimator 160 and the error correction unit 170.
- a branch refers to a transition from a state at a given time to a state at the next time, and an ideal signal can be derived for each branch.
- a path is a concatenation of one or more branches that have passed through to the state at a given time.
- the metrics of the branches constituting the path are integrated, and it is evaluated that the path with the smallest metric integrated value is most likely.
- the metric in the ML filter can be calculated, for example, according to the following formula (3).
- the ARML filter 150 can calculate the metric according to the following equation (4).
- L represents a noise correlation length
- the correlation coefficient set w omega noise.
- the offset error, the standard deviation of white noise, and the noise correlation coefficient set are estimated by the noise estimator 160.
- the binarizer 161 binarizes the output signal from the ARML filter 150 and outputs it to the PR channel filter 162.
- the binarizer 161 is not necessary.
- the PR channel filter 162 receives a binary signal from the binarizer 161 (or the ARML filter 150). The PR channel filter 162 performs a filtering process corresponding to the PR class on the binary signal to generate an ideal signal. For example, if the PR class employed in signal processing is 12221, the PR channel filter 162 can be implemented by an FIR filter using tap coefficients [1, 2, 2, 2, 1]. The PR channel filter 162 outputs the ideal signal to the subtracter 163.
- the subtractor 163 inputs the output signal of the nonlinear noise suppression unit as a reproduction signal, and inputs an ideal signal from the PR channel filter 162.
- the subtracter 163 subtracts the ideal signal from the reproduction signal and outputs a difference signal (that is, a noise component) to the selector 164.
- the calculated offset error m ⁇ , white noise standard deviation ⁇ ⁇ , and noise correlation coefficient set w ⁇ are output to a metric calculation unit (not shown) in the ARML filter 150 via a low-pass filter (LPF). Is done.
- LPF low-pass filter
- the noise estimator 160 is, for example, an input signal that is referred to in order to calculate noise parameters (that is, the calculated offset error m ⁇ , white noise standard deviation ⁇ ⁇ , and noise correlation coefficient set w ⁇ ).
- the control band of the ARML filter 150 can be adjusted through the number of samples and the LPF band.
- the noise estimator 160 may update the noise parameters sequentially as illustrated in FIG. 5 or may update the noise parameters in a different manner. Specifically, the noise estimator 160 may calculate an initial value of the noise parameter by using a part of the input signal as a training portion, and may continue to use the initial value until the next update timing. In this case, the noise estimator 160 can adjust the control band of the ARML filter 150 through the cycle of the update timing.
- the error correction unit 170 inputs the hard decision result or the soft decision result of the reproduction signal from the ARML filter 150.
- the error correction unit 170 performs deinterleaving processing corresponding to the interleaving processing performed at the time of data recording. Then, the error correction unit 170 obtains reproduced data by performing error correction decoding corresponding to error correction encoding (for example, Reed-Solomon encoding, LDPC encoding, etc.) performed at the time of data recording.
- error correction decoding for example, Reed-Solomon encoding, LDPC encoding, etc.
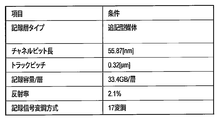
- the information recording / reproducing apparatus can reproduce data from an optical recording medium that satisfies the specification shown in FIG. 6A, for example.
- the information recording layer type is a write-once type
- the channel bit length is 55.87 [nm]
- the track pitch is 0.32 [ ⁇ m].
- the data recording capacity of each information recording layer is 33.4 GB
- the reflectance of each information recording layer is about 2%
- the data is recorded in a state modulated by 17 modulation methods.
- the information recording / reproducing apparatus satisfies the specifications shown in FIG. 6B, for example.
- the NA of the objective lens is 0.85
- the wavelength of the laser used for data recording / reproduction is 405 [nm]
- the reproduction power is 1.2 [mW].
- the PR class employed in signal processing is 12221
- the channel bit rate is 132 Mbps.
- the order of the Volterra filter 130 is 3, the number of taps of the linear filter operation is 13, the number of taps of the secondary filter operation is 13 ⁇ 13, and the number of taps of the tertiary filter operation is 7 ⁇ 7 ⁇ 7.
- the optical recording medium used in this experiment satisfies the specifications shown in FIG. 6A.
- a comparison method (referred to as a first comparison method for convenience) for this embodiment was prepared.
- the information recording / reproducing apparatus according to the first comparison method includes a reproduction signal processing unit shown in FIG. 7 includes a band pass filter 201, an offset canceller 202, an AGC 203, an ITR 204, a PLL 205, an FIR filter 206, a tap controller 207, an ML filter 208, a reference level detector 209, and the like. And an error correction unit 210.
- the reproduction signal processing unit in FIG. 7 is different from the reproduction signal processing unit in FIG. 1 in a function unit for suppressing nonlinear noise components.
- the nonlinear distortion suppression unit in FIG. 1 is replaced with the FIR filter 206 and the tap controller 207 in FIG.
- the correlation noise suppression unit in FIG. 1 is replaced with the ML filter 208 and the reference level calculator 209 in FIG.
- the band pass filter 201, the offset canceller 202, the AGC 203, the ITR 204, the PLL 205, and the error correction unit 210 of FIG. 7 correspond to the band pass filter 100, the offset canceller 110, the AGC 120, the ITR 121, the PLL 122, and the error correction unit 170 of FIG. To do.
- the FIR filter 206 performs FIR filter processing on the input signal using the tap coefficient given from the tap controller 207.
- the ML filter 208 differs from the ARML filter 150 in that no noise component based on the AR model is considered.
- the ML filter 208 and the reference level calculator 209 in the first comparison method are replaced with the correlation noise suppression unit in FIG. 1 (referred to as the second comparison method for convenience), and
- the FIR filter 206 and the tap controller 207 are replaced with the nonlinear distortion suppression component shown in FIG. 1 (referred to as a third comparison method).
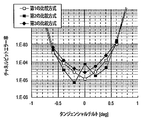
- FIG. 8A and 8B show experimental results of channel bit error rate characteristics with respect to tangential tilt.
- FIG. 8A depicts experimental results of the first comparison method, the second comparison method, and the third comparison method.
- the tangential tilt means a tangential tilt [degree] of the optical recording medium during reproduction of the optical recording medium.
- the second comparison method and the third comparison method did not necessarily show better characteristics than the first comparison method.
- the nonlinear distortion suppression unit and the correlation noise suppression unit of FIG. 1 is introduced to the first comparison method, it is favorable for an optical recording medium that satisfies the specifications shown in FIG. 6A. It is difficult to achieve the characteristics stably.
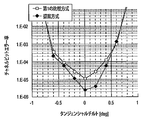
- FIG. 8B shows experimental results of the proposed method (that is, the information recording / reproducing apparatus according to the present embodiment) in addition to the experimental results of the first comparison method.
- the proposed method achieved better characteristics than the first comparison method over a wide range. Therefore, at least with respect to tangential tilt, the proposed method can stably achieve good characteristics for an optical recording medium that satisfies the specification shown in FIG. 6A.
- FIG. 9A and 9B show experimental results of channel bit error rate characteristics with respect to recording pulse width deviation.
- FIG. 9A shows experimental results of the first comparison method, the second comparison method, and the third comparison method.
- the deviation of the recording pulse width means a deviation [T] from the optimum value of the recording pulse width at the time of recording on the optical recording medium.
- the mark size recorded on the optical recording medium changes. This change causes a nonlinear noise component in the reproduction signal.
- the second comparison method and the third comparison method did not necessarily show better characteristics than the first comparison method.
- the nonlinear distortion suppression unit and the correlation noise suppression unit of FIG. 1 is introduced to the first comparison method, it is favorable for an optical recording medium that satisfies the specifications shown in FIG. 6A. It is difficult to achieve the characteristics stably.
- FIG. 9B shows the experimental results of the proposed method in addition to the experimental results of the first comparative method.
- the proposed method achieved better characteristics than the first comparison method over a wide range. Therefore, at least with respect to the recording pulse width, the proposed method can stably achieve good characteristics for the optical recording medium that satisfies the specification shown in FIG. 6A.
- FIG. 10A and 10B show experimental results of channel bit error rate characteristics with respect to recording power error.
- FIG. 10A depicts experimental results of the first comparison method, the second comparison method, and the third comparison method.
- the recording power error means an error [%] with respect to the optimum value of the recording power at the time of recording on the optical recording medium.
- the mark size recorded on the optical recording medium changes. This change causes a nonlinear noise component in the reproduction signal.
- the second comparison method and the third comparison method did not necessarily show better characteristics than the first comparison method.
- the nonlinear distortion suppression unit and the correlation noise suppression unit of FIG. 1 is introduced to the first comparison method, it is favorable for an optical recording medium that satisfies the specifications shown in FIG. 6A. It is difficult to achieve the characteristics stably.
- FIG. 10B shows the experimental results of the proposed method in addition to the experimental results of the first comparative method.
- the proposed method achieved better characteristics than the first comparison method over a wide range. Therefore, at least regarding the recording power, the proposed method can stably achieve good characteristics for the optical recording medium that satisfies the specification shown in FIG. 6A.
- the system margin for each recording / reproducing condition of each method can be evaluated as shown in FIG.
- the system margin corresponds to an allowable error for various recording conditions. That is, although the reproduction characteristics are deteriorated according to the error regarding various recording conditions, if the error is within the system margin, it is possible to obtain correct reproduction data by error correction processing or the like.
- channel bit error rate 1.0E- 4 was used. This threshold value is an appropriate value in consideration of the correction capability of an error correction code scheme assumed to be applied to the error correction unit 170. According to FIG. 11, the proposed method can ensure a larger system margin than the first comparison method, the second comparison method, and the third comparison method for any recording / reproduction condition.
- the margins of the first comparison method, the second comparison method, and the third comparison method were all about 25 to 26%, whereas the margin of the proposed method was 8 points or more. It was a high 34%.
- the recording power margin in the optical recording medium is generally about 20 to 25%.
- various signal processing parameters can be set in the information recording / reproducing apparatus according to the present embodiment.
- the control band of the noise suppression unit, the number of taps used in the Volterra filter 130 and the control band of the Volterra filter 130, the noise correlation length used in the ARML filter 150, the control band of the ARML filter 150, etc. can be set Are prepared as various signal processing parameters.
- examples of setting these parameters will be referred to.
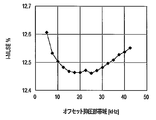
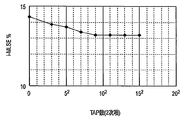
- FIG. 20A shows the measured value of i-MLSE when the control band of the offset suppression unit in the information recording / reproducing apparatus according to the present embodiment is changed.
- the horizontal axis represents the control band of the offset suppression unit
- the vertical axis represents i-MLSE.
- i-MLSE is a performance evaluation index disclosed in Non-Patent Document 1. It can be evaluated that the smaller the i-MLSE is, the smaller the noise component remaining in the equalized signal is, so that data can be stably reproduced.
- the control band of the offset suppression unit is set in a range between approximately 15 kHz and 25 kHz.
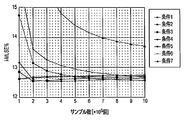
- FIG. 20B shows a change in i-MLSE with respect to an increase in the number of samples processed in the Volterra filter 130 in the information recording / reproducing apparatus according to the present embodiment.
- Condition 1-7 is prepared by setting the step size parameter smaller in steps. That is, the step size parameter of condition 1 is the largest, and the step size parameter of condition 7 is the smallest.
- the tap controller 140 adaptively controls the tap coefficient, the i-MLSE gradually converges to a good value as the number of processing samples increases. Then, the number of processing samples (in other words, time) required until convergence is smaller as the control band is higher (that is, the step size parameter is larger).
- i-MLSE gradually converges to a good value as the number of processed samples increases. Also, the smaller the step size parameter, the larger the number of processing samples required to converge. However, it is not always preferable to increase the step size parameter excessively. Regarding condition 1-2, i-MLSE does not improve even if the number of samples processed increases, but rather deteriorates slightly.
- the control band of the Volterra filter 130 is preferably set in a range of approximately 0.7 kHz or less.
- FIG. 20C shows a frequency characteristic of a noise component of a certain pattern estimated by the noise estimator 160 in the information recording / reproducing apparatus according to the present embodiment.
- a large rise appears from 100 Hz to the low frequency side (approximately 60 Hz). Further, a plurality of large swells appear intermittently from 200 Hz to the high frequency side.
- the noise component on the low frequency side from 100 Hz should be suppressed by the adaptive control of the ARML filter 150.
- the noise component on the high frequency side from 200 Hz is a component resulting from variation in estimation by the noise estimator 160. Therefore, it is preferable that the control band of the ARML filter 150 is set lower than 300 Hz, for example.
- FIG. 21A shows i-MLSE measurement values when the number of taps used in the linear filter calculation of the Volterra filter 130 in the information recording / reproducing apparatus according to the present embodiment is changed.
- i-MLSE improves with an increase in the number of taps in a range of approximately 7 or more and 11 or less
- the improvement range of i-MLSE is small in a range of 11 or more. Therefore, the number of taps used in the linear filter calculation of the Volterra filter 130 is preferably 11 or more.
- FIG. 21B shows i-MLSE measurement values when the number of taps used in the secondary filter calculation of the Volterra filter 130 in the information recording / reproducing apparatus according to the present embodiment is changed.
- the range of 11 2 or less i-MLSE improves with increasing number of taps
- 11 improve the width of the i-MLSE is small in two or more ranges.
- the number of taps used in the secondary filter operation Volterra filter 130 is preferably 11 2 or more.
- FIG. 21C shows i-MLSE measurement values when the number of taps used in the third-order filter calculation of the Volterra filter 130 in the information recording / reproducing apparatus according to the present embodiment is changed.
- the number of taps used in the third-order filter operation Volterra filter is preferably 5 3 or more.
- FIG. 22 shows the change of the channel bit error rate in the output signal of the ARML filter 150 in the information recording / reproducing apparatus according to the present embodiment with respect to the change of the mark jitter of the optical recording medium.
- FIG. 22 shows the results when the noise correlation length used in the ARML filter 150 is set to 0 bit, 1 bit, 2 bits, and 3 bits.
- the noise correlation length used in the ARML filter 150 is set to 0 bit, 1 bit, 2 bits, and 3 bits.
- the noise correlation length is 1 bit
- the channel bit error rate is deteriorated as compared with the case where the noise correlation length is 0 bit (that is, when the ARML filter 150 corresponds to a normal ML filter). is doing.
- the noise correlation length is increased to 2 bits, the channel bit error rate is greatly improved.
- the noise correlation length used in the ARML filter 150 is preferably 2 bits or more.
- various signal processing parameters may be set to the values exemplified below.
- the control band of the offset suppression unit is set to 20 kHz
- the control band of the Volterra filter 130 is set to 0.7 kHz
- the control band of the ARML filter 150 is set to 200 kHz or less. According to this setting, since the control band of the offset suppression unit, the Volterra filter 130, and the ARML filter 150 is sequentially reduced, the Volterra filter 130 and the ARML filter 150 can be adaptively controlled stably.
- the number of taps used in the linear filter operation of the Volterra filter 130 is set to 13
- the number of taps used in the secondary filter operation is set to 13 ⁇
- the number of taps used in the tertiary filter operation is 7 ⁇ . 7 ⁇ 7 is set.
- the noise correlation length used in the ARML filter 150 is set to 2 bits.
- the information recording / reproducing apparatus sequentially applies offset suppression, nonlinear distortion suppression, and correlation noise suppression to a reproduction signal. Therefore, according to this information recording / reproducing apparatus, the non-linear noise component remaining in the reproduction signal read from the optical recording medium is effectively suppressed, and data can be stably reproduced from the optical recording medium. Further, according to the information recording / reproducing apparatus, a large system margin can be ensured for various recording / reproducing conditions.
- the information recording / reproducing apparatus includes a PUH (Pick Up Head) 300, a servo processing circuit 320, and a signal processing circuit 340.
- the information recording / reproducing apparatus of FIG. 17 can record / reproduce data on / from an optical recording medium that includes a servo layer and has multiple information recording layers.
- the solid line arrow represents the flow of the electric signal
- the alternate long and short dash line represents the flow of the blue laser (laser for the information recording layer)
- the broken line arrow represents the red laser (laser for the servo layer).
- the PUH 300 generates a servo layer laser and an information recording layer laser.
- the PUH 300 irradiates a part of the laser to the optical recording medium and outputs the remaining part to the servo processing circuit 320 in the form of an electric signal. Further, the PUH 300 outputs the return light from the optical recording medium to the servo processing circuit 320 in the form of an electric signal.
- the PUH 300 includes a red laser diode (LD) 301, a blue LD 302, an optical system 303, a red laser front monitor 304, a blue laser front monitor 305, a red laser aberration correction mechanism 306, and a blue laser aberration.
- a correction mechanism 307, an objective lens 308, an objective lens driving mechanism 309, a red laser light receiving element 310, a blue laser light receiving element 311, a red laser driving circuit 312, and a blue laser driving circuit 313 are provided. .
- the LD 301 is a light source of a red laser for the servo layer.
- the wavelength of the red laser is about 650 nm.
- the laser drive circuit 312 controls the intensity of the laser generated by the LD 301 in accordance with a control signal from a power control circuit 321 described later.
- the LD 302 is a blue laser light source for the information recording layer. The wavelength of the blue laser is about 405 nm.
- the laser driving circuit 313 controls the intensity of the laser generated by the LD 302 in accordance with control signals from a power control circuit 323 and a pulse modulation circuit 324 described later.
- the laser drive circuits 312 and 313 can turn on the LDs 301 and 302 at the same time.
- the optical system 303 divides the red laser into light for front monitoring and light for medium irradiation.
- the light for front monitor is condensed on the front monitor 304, and the light for medium irradiation is condensed on the servo layer of the optical recording medium via the aberration correction mechanism 306 and the objective lens 308.
- the return light from the servo layer is guided to the light receiving element 310 via the objective lens 308, the aberration correction mechanism 306, and the optical system 303.
- the light receiving element 310 converts the received light into an electrical signal and outputs it to a focus control circuit 325, a tracking control circuit 326, and a preamplifier 327, which will be described later.
- the front monitor 304 converts the front monitor light into an electrical signal and outputs it to the power control circuit 321.
- the aberration correction mechanism 306 Based on a control signal from an aberration control circuit 333, which will be described later, the aberration correction mechanism 306 generates various aberrations (for example, a spherical surface, a medium irradiation light, and a return light from the servo layer). Wavefront aberration is controlled by providing astigmatism and coma).
- the aberration correction mechanism 306 focuses the focused spot of the red laser on a desired servo layer based on the focus error signal from the focus control circuit 325.
- the optical system 303 divides the blue laser into light for front monitoring and light for medium irradiation.
- the light for front monitor is condensed on the front monitor 305, and the light for medium irradiation is condensed on the information recording layer of the optical recording medium via the aberration correction mechanism 307 and the objective lens 308.
- the return light from the information recording layer is guided to the light receiving element 311 via the objective lens 308, the aberration correction mechanism 307, and the optical system 303.
- the light receiving element 311 converts the received light into an electric signal and outputs it to a focus control circuit 329, a tracking control circuit 330, and a preamplifier 331, which will be described later.
- the front monitor 305 converts the light for front monitor into an electric signal and outputs it to the sample / hold circuit (S / H) 322. Based on a control signal from an aberration control circuit 334, which will be described later, the aberration correction mechanism 307 generates various aberrations (for example, a spherical surface, a medium irradiation light and a return light from the servo layer). Wavefront aberration is controlled by providing astigmatism and coma).
- the objective lens 308 is driven in the focus direction or the tracking direction by the objective lens driving mechanism 309, and the tilt state is controlled.
- the objective lens driving mechanism 309 inputs a tracking error signal from the tracking control circuit 326 when data is recorded on the optical recording medium.
- the objective lens driving mechanism 309 causes the focused spot of the red laser to follow the desired track based on the tracking error signal.
- the radial position of the focused spot of the blue laser is controlled together with the radial position of the focused spot of the red laser.
- the objective lens driving mechanism 309 inputs a focus error signal from the focus control circuit 329.
- the objective lens driving mechanism 309 focuses the focused spot of the blue laser on a desired information recording layer based on the focus error signal.
- the objective lens driving mechanism 309 inputs a tracking error signal from the tracking control circuit 330 when reproducing data from the optical recording medium.
- the objective lens driving mechanism 309 causes the focused spot of the blue laser to follow a desired track based on the tracking error signal.
- the objective lens driving mechanism 309 controls the tilt state of the objective lens 308 based on a control signal from a tilt control circuit 335 described later.
- the servo processing circuit 320 receives various electrical signals from the PUH 300 and the signal processing circuit 340, generates various control signals based on them, and outputs them to the PUH 300.
- the servo layer processing circuit 320 includes a red laser power control circuit 321, a sample / hold circuit 322, a blue laser power control circuit 323, a pulse modulation circuit 324, a red laser focus control circuit 325, and a red laser.
- the power control circuit 321 inputs an electric signal from the front monitor 304.
- the power control circuit 321 generates a control signal for bringing the input electric signal close to a desired value, and feeds it back to the laser drive circuit 312.
- the timing of the sample / hold circuit 322 is controlled by a control signal output from the pulse modulation circuit 324.
- the sample / hold circuit 322 samples / holds the electrical signal from the front monitor 305 and outputs it to the power control circuit 322.
- the power control circuit 323 inputs an electric signal from the sample / hold circuit 322.
- the power control circuit 323 generates a control signal for bringing the input electric signal close to a desired value and feeds it back to the laser driving circuit 313.
- the pulse modulation circuit 324 receives a reference clock signal from a clock generation unit 341, which will be described later, at the time of data recording, and a recording signal (for example, NRZI (Non Return to Zero Inversion), which will be described later). Signal).
- the pulse modulation circuit 324 generates a control signal based on the reference clock signal and the recording signal, and outputs the control signal to the laser driving circuit 313 and the sample / hold circuit 322.
- the laser intensity of the LD 302 is modulated in a pulse shape. For example, the laser intensity of the LD 302 is high when the recorded data is “1”, and the LD 302 is turned off when the recorded data is “0”.
- the focus control circuit 325 inputs an electric signal from the light receiving element 310.
- the focus control circuit 325 calculates an input electrical signal based on, for example, a knife edge method, an astigmatism method, and generates a focus error signal.
- the focus control circuit 325 outputs a focus error signal to the aberration correction mechanism 306.
- the tracking control circuit 326 inputs an electric signal from the light receiving element 310 when data is recorded on the optical recording medium.
- the tracking control circuit 325 calculates an input electrical signal based on, for example, a push-pull method, a DPP (Differential Push-Pull) method, and generates a tracking error signal.
- the tracking control circuit 326 outputs a tracking error signal to the objective lens driving mechanism 309 and a PUH driving mechanism (not shown).
- the preamplifier 327 inputs an electric signal from the light receiving element 310.
- the preamplifier 327 adjusts the amplitude of the input electric signal according to the gain, and outputs it to the A / D 328.
- the A / D 328 receives a signal from the preamplifier 327, performs analog-digital conversion, and outputs the signal to the signal processing circuit 340.
- the focus control circuit 329 inputs an electric signal from the light receiving element 311.
- the focus control circuit 329 calculates an input electrical signal based on, for example, a knife edge method, an astigmatism method, and generates a focus error signal.
- the focus control circuit 329 outputs a focus error signal to the objective lens driving mechanism 309.
- the tracking control circuit 330 inputs an electrical signal from the light receiving element 311 when reproducing data from the optical recording medium.
- the tracking control circuit 330 calculates an input electric signal based on, for example, a DPD (Differential Phase Detection) method, and generates a tracking error signal.
- the tracking control circuit 330 outputs a tracking error signal to the objective lens driving mechanism 309 and a PUH driving mechanism (not shown).
- the preamplifier 331 inputs an electric signal from the light receiving element 311.
- the preamplifier 331 adjusts the amplitude of the input electric signal according to the gain, and outputs the adjusted signal to the A / D 332.
- the A / D 332 receives a signal from the preamplifier 331, performs analog-digital conversion, and outputs the signal to the signal processing circuit 340.
- the aberration control circuit 333 receives aberration error data from an aberration error calculation unit 344 described later, and generates a control signal based on the aberration error data.
- the aberration control circuit 333 outputs a control signal to the aberration correction mechanism 306.
- the aberration control circuit 334 receives aberration error data from an aberration error calculator 345 described later, and generates a control signal based on the aberration error data.
- the aberration control circuit 334 outputs a control signal to the aberration correction mechanism 307.
- the tilt control circuit 335 inputs tilt error data from a tilt error calculation unit 346 or 347 described later, and generates a control signal based on the tilt error data.
- the tilt control circuit 335 outputs a control signal to the objective lens driving mechanism 309.
- the signal processing circuit 340 processes a reproduction signal from the optical recording medium and generates a recording signal to the optical recording medium.
- the signal processing circuit 340 includes a clock generation unit 341, an address processing unit 342, a signal processing unit 343, a red laser aberration error calculation unit 344, a blue laser aberration error calculation unit 345, and a red laser tilt error calculation.
- the clock generator 341 generates a reference clock signal and supplies it to the pulse modulation circuit 324.
- the address processing unit 342 performs processing related to address information such as reading of address information. The read address information is transmitted to the controller.
- the signal processing unit 343 includes a reproduction signal processing unit illustrated in FIG. 1 and a recording signal processing unit (not shown).
- the recording signal processing unit inputs user data from a controller (not shown), and converts the user data into a data string that can be recorded on an optical recording medium. Specifically, the recording signal processing unit performs scramble processing on the user data to randomize the data pattern, or error correction coding (for example, Reed-Solomon coding, LDPC code) for error correction. Etc.) and an interleaving process for avoiding continuous errors. Further, the recording signal processing unit adds a sector-address number corresponding to the address information of the data to the user data, and adds a burst detection subcode for detecting a burst error.
- error correction coding for example, Reed-Solomon coding, LDPC code
- the recording signal processing unit performs 17PP (Parity Preserved) modulation or ETM (Eight to Twelve Modulation) in order to control the minimum inversion length of the user data by restricting the run length, and performing NRZI conversion to perform optical A data string that can be recorded on a recording medium is obtained.
- the reproduction signal processing unit inputs reproduction signals from A / D 328 and A / D 332, and performs adaptive filter processing for suppressing the nonlinear noise component described with reference to FIG. Further, the reproduction signal processing unit performs a demodulation process corresponding to the modulation scheme that restricts the run length described above on the reproduction signal, or performs error correction decoding corresponding to the error correction coding scheme, Restore user data. The restored user data is transmitted to the controller.
- the aberration error calculation unit 344 receives a digital signal from the A / D 328 and calculates an aberration error amount based on the digital signal.
- the aberration error calculation unit 344 outputs the aberration error data to the aberration control circuit 333.
- the aberration error calculation unit 345 receives a digital signal from the A / D 332 and calculates an aberration error amount based on the digital signal.
- the aberration error calculation unit 345 outputs the aberration error data to the aberration control circuit 334.
- the tilt error calculation unit 346 receives a digital signal from the A / D 328 and calculates a tilt error amount based on the digital signal.
- the tilt error calculation unit 346 outputs tilt error data to the tilt control circuit 335.
- the tilt error calculation unit 347 receives a digital signal from the A / D 332 and calculates a tilt error amount based on the digital signal.
- the tilt error calculation unit 347 outputs tilt error data to the tilt control circuit 335.
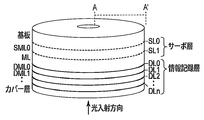
- FIG. 12A illustrates an optical recording medium having a servo layer that can be read by the information recording / reproducing apparatus according to the present embodiment.
- 12B is a cross-sectional view taken along the line A-A ′ of FIG. 12A.
- the outer shape of the optical recording medium is disk-shaped, and a clamp hole is formed at the center thereof.
- the optical recording medium has a layer structure in which two servo layers and a plurality of information recording layers are formed.
- a servo layer is provided on the back side when viewed from the light incident direction, and an information recording layer is provided on the front side.
- the disk substrate the servo layer 0 (SL0), the servo interlayer intermediate layer 0 (SML0), the servo layer 1 (SL1), and the intermediate layer (ML) in order from the back as viewed from the light incident direction.
- a cover layer is provided on the most front side when viewed from the light incident direction.
- the thickness of the optical recording medium is 1.2 mm, and the thickness of the disk substrate is about 0.8 mm.
- the thickness of the servo interlayer intermediate layer No. 0 (SML0) is determined in consideration of the wavelength of the laser for the servo layer (for example, 605 nm), and can be designed to be, for example, 55 ⁇ m.
- the intermediate layer (ML) has a thickness of 126 ⁇ m.
- the cover layer has a thickness of 50 ⁇ m.
- a plurality of types of thicknesses may be designed for the information recording interlayer. If the adjacent information recording interlayers are appropriately designed to have different thicknesses, the reflected light from the non-reproducing layer is not condensed on the reproducing layer.
- the thickness of the first type layer is designed to be relatively thin (for example, 12 ⁇ m)
- the thickness of the second type layer is designed to be relatively thick (for example, 16 ⁇ m).
- the thickness of the optical recording medium can be reduced by designing the total number of the first type layers to be equal to or greater than the total number of the second type layers. In the optical recording medium shown in FIGS.
- the even-numbered information recording interlayers (DML0, DML2,7) are treated as the first type layers, and the odd-numbered information recording interlayers ( It is preferable to design DML1, DML3, etc To be handled as the second type of layer. Note that if the thickness of the optical recording medium is reduced, aberrations that occur when reproducing the inner layer can be reduced.
- the thickness of each layer can be designed based on the wavelength of the laser for the information recording layer and the wavelength of the laser for the servo layer. For example, since the wavelength of the servo layer laser is longer than the wavelength of the information recording layer laser, the thickness of the servo interlayer interlayer is smaller than that of the information recording interlayer interlayer in order to reduce the influence of interlayer crosstalk. Designed thick. Further, no interlayer jump operation of the focused spot occurs between the servo layer and the information recording layer. Therefore, the thickness of the intermediate layer (ML) is designed to be thicker than that of the servo interlayer, thereby reducing the influence of crosstalk.
- the servo interlayer intermediate layer, the intermediate layer (ML), and the information recording interlayer interlayer are all designed to exhibit a transmittance close to 100% with respect to the servo layer laser and the information recording layer laser.
- the servo layer is formed of a film made of a metal having a thickness of submicron order.
- the servo layer No. 0 (SL0) is formed of a film that exhibits a semi-transmission characteristic that reflects part of the servo layer laser and transmits part of the laser.
- tracks serving as servo guides are formed in the servo layer.
- the information recording layer is composed of a multilayer film including a storage material capable of recording / reproducing and erasing information with a laser for the information recording layer. This multilayer film exhibits the characteristic of transmitting the servo layer laser. Further, this multilayer film exhibits the characteristics of transmitting a part of the laser for the information recording layer, reflecting a part thereof, and absorbing a part thereof.
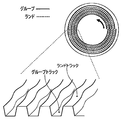
- FIG. 13 shows an example of the servo layer and the information recording layer.
- a spiral track is formed on the servo layer.
- tracks are formed in spiral shapes in opposite directions on both servo layers. That is, if a track is formed in a clockwise spiral on the servo layer 0 (SL0), a track is formed in a counterclockwise spiral on the servo layer 1 (SL1). Conversely, tracks may be formed in a counterclockwise spiral shape on the servo layer 0 (SL0), and tracks may be formed in a clockwise spiral shape on the servo layer 1 (SL1).
- the track is provided with continuously formed grooves.
- the groove is given a minute vibration (wobble) in the radial direction of the optical recording medium.
- By modulating the frequency or phase of this wobble, or by placing recording marks such as prepits on part of the track, address information indicating the track number and circumferential position, and disc information indicating the characteristics of the optical recording medium Etc. are recorded in the servo layer.
- a preformat area is formed on the inner periphery and outer periphery of the information recording layer. In the inner circumference preformat area and the outer circumference preformat area, a learning pattern for optimizing the recording waveform, management information for managing the disk, and the like are recorded.
- the disc information shown in FIG. 16 is recorded on the servo layer using wobble modulation or recording marks.
- the disc information can include information indicating the type of the disc format, information indicating the disc size (for example, a physical size such as the diameter of the optical recording medium), and information indicating the maximum transfer rate.
- the disc information includes information indicating the number of servo layers, information indicating the number of information recording layers, and information indicating the type of format applicable to the information recording layer (for example, once recording, packet recording, etc.). Can do.
- the disc information can include information indicating the recording density (for example, the track pitch of the recording mark row, the mark pitch in the linear direction, etc.).
- the disc information an arrangement of areas in which user data is recorded among areas assigned addresses in the optical recording medium and information other than the user data (for example, a learning pattern for optimizing the recording waveform) are recorded.
- Information area arrangement information indicating the arrangement of the management information recording area can be included.
- the disc information includes information indicating the order of the Volterra filter 130 suitable for reproduction of the optical recording medium (for example, the optimum) and the number of taps required for the filter operation of each order, and the noise correlation length required in the ARML filter 150. Indicating information.
- the disc information includes information indicating the control band of the adaptive control filter (for example, the step size parameter of the Volterra filter 130, the band for calculating the noise parameter given to the ARML filter 150 (or the period of the update timing of the noise parameter), etc.). Can be included.
- the disc information indicates information indicating the reproduction power allowed by the optical recording medium, information indicating the recording power suitable for the optical recording medium (for example, optimum), and the shape of the recording pulse (for example, width, interval, etc.). Recording pulse information. Further, a spare area may be provided in the optical recording medium for disc information.
- spiral tracks are formed on the servo layer. As shown in FIG. 14, this track is formed by carving a groove on a surface called a land. The groove is formed so as to be displaced in the inner circumferential direction or the outer circumferential direction by half of the groove pitch for each round of the optical recording medium. Accordingly, the track has a single spiral structure in which the groove and the land are alternately switched every round of the optical recording medium.
- FIG. 15 illustrates wobble phase modulation.
- 1-bit information is expressed by the phase of four sine wave wobbles.
- the phase in which the meandering first advances toward the inner circumference side in the scanning direction is assigned to “0”, and the phase in which the first meandering advances outward in the scanning direction is assigned to “1”.
- the recording waveform is a type of waveform called a multi-pulse in which a plurality of pulses are used to record one mark. Of these multiple pulses, the first one is called the first pulse and the last one is called the last pulse. Of these multiple pulses, pulses other than the first pulse and the last pulse are referred to as multi-pulses. After the last pulse, a period (cooling pulse) for outputting bias power 1 is prepared.
- the shape of the recording waveform is defined by using four levels of recording power, erasing power, bias power 1 and bypass power 2 with respect to the level.
- the shape of the recording waveform is defined with respect to time using various time parameters based on the rising edge of the NRZI signal and the clock signal.
- the time information includes, for example, a first pulse start time F1, a first pulse end time F3, a first pulse interval F2, and the like.
- time parameters that easily affect the formation of recording marks such as the first pulse start time F1 and the last pulse end time L3 may be dynamically changed during data recording in accordance with the NRZI signal.
- Various parameters that determine the shape of the recording waveform are managed in the memory of the information recording / reproducing apparatus as shape information of the recording waveform, and are recorded on the optical recording medium as physical format information and management information.
- the reference clock is used for timing control in the information recording / reproducing apparatus.
- T represents the period of the reference clock.
- the reference clock is generated by the clock generation unit 341 described above.
- the NRZI signal is obtained by converting recording data into the NRZI format.
- the above-described pulse modulation circuit 324 When recording data on the optical recording medium, the above-described pulse modulation circuit 324 generates a recording pulse based on the shape information of the recording waveform and the NRZI signal output from the signal processing unit 343.
- the laser drive circuit 313 drives the LD 302 according to the recording pulse.
- the power of the laser applied to the optical recording medium is modulated as shown in the recording waveform shown in FIG.
- the information recording / reproducing apparatus controls the shape of the recording mark through the recording power level, the width of each pulse, and the like. For example, as the recording power level increases, the width of the recording mark increases. Further, if the start time of the first pulse is advanced, the start position of the recording mark is advanced, and as a result, the recording mark length becomes longer. In other words, if the recording power level, the width of each pulse, etc. deviate from the optimum values, the shape of the recording mark also changes from the optimum shape, so that a nonlinear noise component is generated in the reproduction
- system margin was evaluated based on the experimental results.
- system margins are subdivided and assigned as allowable values for various error factors. For example, if the recording power margin is 25%, about 12% is assigned as the tolerance for the recording power error of the information recording / reproducing apparatus, and the remaining 13% is assigned as the tolerance for the manufacturing error of the optical recording medium.
- An error in recording power in an information recording / reproducing apparatus mainly includes two types of elements.
- One element is an error generated in the automatic power adjustment process for maintaining the recording power constant, and the other element is an error generated in the recording power optimization process for determining the optimum recording power for the optical recording medium. . Therefore, 6% is assigned as an allowable value for these two error elements.
- the manufacturing error of the optical recording medium also mainly includes two types of elements. One element is a characteristic variation between optical recording media, and the other element is a characteristic variation between information recording layers in the same optical recording medium. 8% is assigned as a tolerance for variation in characteristics between optical recording media, and 5% is assigned as a tolerance for variations in characteristics of each information recording layer in the optical recording medium. If the information recording / reproducing apparatus and the optical recording medium are designed based on the assigned tolerance, the information recording / reproducing apparatus can stably reproduce data from the optical recording medium.
- the characteristics of the information recording layer include not only variations in sensitivity with respect to the recording power of the information recording layer but also variations in transmittance that determine the amount of light passing through the information recording layer. That is, when the information recording layer is multilayered, in addition to variations in sensitivity of a given information recording layer, one or more formed on the front side (laser incident surface side) of the information recording layer It is necessary to consider variations in the transmittance of the information recording layer.
- the sensitivity variation of each information recording layer is about 3% and the transmittance variation of each information recording layer is about 1%.
- the variation in characteristics of the information recording layer formed on the most front side is estimated to be 3%.
- the variation in characteristics of the information recording layers formed in the second and subsequent layers is evaluated by adding the variation in transmittance of the information recording layer formed in front of the information recording layer. That is, the variation in characteristics of the second information recording layer was estimated to be 4%, and the variation in characteristics of the information recording layer formed in the third layer was estimated to be 5%.
- the recording power margin is increased to 34%. Therefore, by assigning a part of the enlarged margin as an allowable value for the characteristic variation of each information recording layer in the optical recording medium, the allowable value can be increased to, for example, 10%. Therefore, according to the information recording / reproducing apparatus according to the present embodiment, the data can be stably recorded on the optical recording medium in which the information recording layer is composed of four or more layers without improving the film characteristics of the information recording layer. Can be recorded and reproduced. That is, by multilayering the conventional information recording layer, an optical recording medium capable of stably recording and reproducing data can be manufactured at low cost.
- the information recording layer does not have a guide groove structure. Therefore, the manufacturing cost of the optical recording medium can be reduced. In addition, since light is not diffracted by the groove structure, the transmittance of the information recording layer can be improved. That is, it is possible to suppress a decrease in the reflectance of the optical recording medium due to the multilayered information recording layer.
- the servo layer laser and the information recording layer laser are different as described above.
- the focused spot of the laser for the information recording layer is positioned according to the guide of the servo layer.
- the radial positions of the condensing spots of the laser for the information recording layer and the laser for the servo layer do not completely coincide with each other, and both of them are caused by the tilt of the optical recording medium or the objective lens. There is a misalignment between the two.
- the optical recording medium provided with the servo layer is positioned in the radial direction of the focused spot of the laser for the information recording layer as compared with a normal optical recording medium (that is, the information recording layer has a guide groove structure). It is inferior in accuracy. Therefore, according to the optical recording medium including the servo layer, for example, the positioning procedure in the additional recording process that is resumed after the data recording is interrupted becomes more complicated than that of a normal optical recording medium.
- an information recording / reproducing apparatus performs the above-described recording power optimization process in, for example, a preformat area in an information recording layer when recording data on an optical recording medium. Specifically, the information recording / reproducing apparatus records a learning test pattern while changing the recording power in a specific area in the information recording layer, and reproduces the recorded test pattern to thereby record the information recording layer. Determine the optimal power. According to a normal optical recording medium, the error in the recording power optimization process can be suppressed to about 6%. On the other hand, according to the optical recording medium provided with the servo layer, the above-described deterioration in positioning accuracy, complication of the positioning procedure, and the like are affected. .
- the information recording / reproducing apparatus distributes a part of the above-described margin increase as an allowable value for an error caused by the recording power optimization process, thereby expanding the allowable value to 9%, for example.
- Data can be stably recorded and reproduced with respect to an optical recording medium having a layer.
- the information recording / reproducing apparatus can read, for example, an optical recording medium that satisfies the specifications shown in FIG. 19A.
- the information recording layer type is a write-once type
- the number of servo layers is 2
- the guide structure formed in each servo layer is a land groove
- the number of information recording layers is The channel bit length is 56.28 [nm].
- the track pitch is 0.32 [ ⁇ m]
- the recording capacity of data in each information recording layer is 32.0 GB
- the reflectance of each information recording layer is about 1%
- the data is converted by 17 modulation methods. Recorded in a modulated state.
- the information recording / reproducing apparatus satisfies the specification shown in FIG. 19B, for example. 19B, the NA of the objective lens for the servo layer is 0.6, the wavelength of the laser for the servo layer is 660 [nm], and the reproduction power for the servo layer is 2.0 [mW ].
- the NA of the objective lens for the information recording layer is 0.85, the wavelength of the laser for the information recording layer is 405 [nm], and the reproduction power for the information recording layer is 1.2 [mW].
- the PR class employed in signal processing is 12221, and the channel bit rate is 132 Mbps.
- the order of the Volterra filter 130 is 3, the number of taps of the linear filter operation is 13, the number of taps of the secondary filter operation is 13 ⁇ 13, and the number of taps of the tertiary filter operation is 7 ⁇ 7 ⁇ 7. .
- the information recording / reproducing apparatus performs, for example, the data recording process shown in FIG. 23A on an optical recording medium having a servo layer.
- the data recording process in FIG. 23A starts from step ST1-1.
- the information recording / reproducing apparatus turns on a servo layer laser (for example, a red laser having a wavelength of 660 [nm]), and focuses the focused spot of the laser on a desired servo layer in the optical recording medium. Focus on.
- the information recording / reproducing apparatus reads the disk information from the guide track formed in the desired servo layer using the servo layer laser (step ST1-2).
- the disc information read in step ST1-2 is, for example, as shown in FIG.
- the information recording / reproducing apparatus can confirm the number of information recording layers in the optical recording medium, the type of format applicable to the information recording layer, and the like by referring to the disc information.
- the information recording / reproducing apparatus starts processing for the information recording layer based on the disc information read in step ST1-2. Specifically, the information recording / reproducing apparatus turns on a laser for an information recording layer (for example, a blue laser having a wavelength of 405 [nm]), and uses the focused spot of the laser to record desired information on an optical recording medium. Focus on the layer (step ST1-3). Subsequently, the information recording / reproducing apparatus records the condensing spot of the laser for the servo layer and the information recording layer for optimizing the recording condition on the information recording layer based on the guide track formed on the servo layer. Move to the radial position set as the learning area (step ST1-4). The information recording / reproducing apparatus performs recording learning in the recording learning area and optimizes recording power, pulse width, and the like (step ST1-5). When step ST1-5 is completed, the process proceeds to step ST1-6.
- a laser for an information recording layer for example, a blue laser having a wavelength of 405 [nm]
- step ST1-6 the information recording / reproducing apparatus moves the converging spot of the laser for the servo layer and the information recording layer to a desired radial position in the information recording layer based on the guide track formed in the servo layer.
- the information recording / reproducing apparatus records user data based on the recording power, pulse width, etc. optimized in step ST1-5 (step ST1-7). Step ST1-7 is repeated until all target user data is recorded (step ST1-8), and the data recording process is completed.
- the information recording / reproducing apparatus performs, for example, the data reproducing process shown in FIG. 23B on the optical recording medium having the servo layer.
- the data reproduction process in FIG. 23B starts from step ST2-1.
- the information recording / reproducing apparatus turns on a servo layer laser (for example, a red laser having a wavelength of 660 [nm]), and the focused spot of the laser is changed to a desired servo layer in the optical recording medium. Focus on.
- the information recording / reproducing apparatus reads the disk information from the guide track formed in the desired servo layer using the servo layer laser (step ST2-2).
- the disc information read in step ST2-2 is, for example, as shown in FIG.
- the information recording / reproducing apparatus can confirm the number of information recording layers in the optical recording medium, the type of format applicable to the information recording layer, and the like by referring to the disc information. Further, the information recording / reproducing apparatus can confirm the number of equalizer taps (for example, the number of taps of the Volterra filter 130) suitable for reproducing data from the information recording layer of the optical recording medium and the noise correlation length of the ARML filter 150. . Further, the information recording / reproducing apparatus can control band information of an adaptive control filter suitable for reproducing data from the information recording layer of the optical recording medium (for example, a step size parameter of the Volterra filter 130, a noise parameter given to the ARML filter 150). Can be confirmed (or the noise parameter update timing period).
- the information recording / reproducing apparatus sets various signal processing parameters based on the disc information read in step ST2-2 (step ST2-3). Specifically, the information recording / reproducing apparatus sets the number of taps of the Volterra filter 130 or sets the noise correlation length of the ARML filter 150. Further, the information recording / reproducing apparatus sets control bands for the offset suppression unit, the Volterra filter 130, and the ARML filter 150. When step ST2-3 is completed, the process proceeds to step ST2-4.
- step ST2-4 the information recording / reproducing apparatus turns on the laser for the information recording layer (for example, a blue laser having a wavelength of 405 [nm]), and sets the focused spot of the laser to desired information on the optical recording medium. Focus on the recording layer. Subsequently, the information recording / reproducing apparatus moves the condensing spot of the laser for the servo layer and the information recording layer to a desired radial position in the information recording layer based on the guide track formed in the servo layer (step ST2-5). The information recording / reproducing apparatus reads user data (step ST2-6). When all target user data is read, the data reproduction process is completed. Incidentally, according to the data reproduction process of FIG. 23B, various signal processing parameters are set to appropriate values in step ST2-3. Therefore, data can be stably reproduced from an optical recording medium having a servo layer and having multiple information recording layers.
- the laser for the information recording layer for example, a blue laser having a wavelength of 405 [nm]
- the information recording / reproducing apparatus records / reproduces data on / from an optical recording medium including a servo layer and having a multilayered information recording layer. Specifically, since this information recording / reproducing apparatus performs the same or similar reproduction signal processing as in the first embodiment, nonlinear noise components in the reproduction signal can be effectively suppressed. Therefore, according to the information recording / reproducing apparatus, a large system margin is ensured, so that data can be stably recorded / reproduced on the optical recording medium.
- the processing of each of the above embodiments can be realized by using a general-purpose computer as basic hardware.
- the program for realizing the processing of each of the above embodiments may be provided by being stored in a computer-readable storage medium.
- the program is stored in the storage medium as an installable file or an executable file. Examples of the storage medium include a magnetic disk, an optical disk (CD-ROM, CD-R, DVD, etc.), a magneto-optical disk (MO, etc.), and a semiconductor memory.
- the storage medium may be any as long as it can store the program and can be read by the computer.
- the program for realizing the processing of each of the above embodiments may be stored on a computer (server) connected to a network such as the Internet and downloaded to the computer (client) via the network.
Landscapes
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Signal Processing For Digital Recording And Reproducing (AREA)
- Optical Recording Or Reproduction (AREA)
Abstract
実施形態によれば、信号処理装置は、第1の信号処理部と、第2の信号処理部と、第3の信号処理部とを備える。第1の信号処理部は、光記録媒体から読み出された再生信号に残留するオフセット成分を抑圧し、第1の信号を得る。第2の信号処理部は、第1の信号に残留する非線形歪成分を抑圧し、第2の信号を得る。第3の信号処理部は、第2の信号に残留する相関雑音成分を抑圧し、第3の信号を得る。
Description
実施形態は、光記録媒体の再生信号に対する信号処理に関する。
光記録媒体は、一般に、高密度化及び多層化されるほど大容量のデータを記録できる。他方、記録条件の最適化処理において精度を確保することが困難となる。故に、光記録媒体からの再生信号に残留する非線形雑音成分(例えば、上下非対称成分など)は増大する。再生信号に残留する非線形雑音成分は、ビットエラーを引き起こし、ユーザデータの再生を妨げるおそれがある。典型的には、光記録媒体の再生装置は、再生信号に残留する雑音成分を抑圧するために例えばFIR(Finite Impulse Response)フィルタを利用する。しかしながら、FIRフィルタは線形等化処理を実現するものであり、非線形雑音成分を十分に抑圧することが困難である。
従って、再生信号に残留する非線形雑音成分を抑圧するために、再生信号に対する非線形等化処理が求められる。非線形等化処理を実現するために、種々のフィルタが提案されている。例えば、ニューラルネットワークフィルタ、ボルテラフィルタ、ARML(Auto Regressive Maximum Likelihood)フィルタ、判定帰還型MLフィルタなどは、非線形等化処理を実現できる。
しかしながら、高密度化及び多層化された光記録媒体からの再生信号には、複数の種別の非線形雑音成分が混入している。故に、上記フィルタのいずれかを単独で用いたとしても、非線形雑音成分を十分に抑圧することが困難であると共にフィルタの適応制御を安定的に実施することが困難である。
International Symposium on Optical Memory 2009 proceedings, "New Signal Quality Evaluation Method for 33.4GB/Layer BDs"
実施形態は、光記録媒体からの再生信号に残留する非線形雑音成分を効果的に抑圧することを目的とする。
実施形態によれば、情報再生装置は、第1の信号処理部と、第2の信号処理部と、第3の信号処理部とを備える。第1の信号処理部は、光記録媒体から読み出された再生信号に残留するオフセット成分を抑圧し、第1の信号を得る。第2の信号処理部は、第1の信号に残留する非線形歪成分を抑圧し、第2の信号を得る。第3の信号処理部は、第2の信号に残留する相関雑音成分を抑圧し、第3の信号を得る。
以下、図面を参照しながら実施形態の説明が述べられる。尚、以降、説明済みの要素と同一または類似の要素には同一または類似の符号が付され、重複する説明は基本的に省略される。
(第1の実施形態)
第1の実施形態に係る情報記録再生装置は、光記録媒体から読み取った再生信号を処理できる。本実施形態に係る情報記録再生装置は、再生信号を処理するために図1に示される再生信号処理部を備えることができる。
第1の実施形態に係る情報記録再生装置は、光記録媒体から読み取った再生信号を処理できる。本実施形態に係る情報記録再生装置は、再生信号を処理するために図1に示される再生信号処理部を備えることができる。
図1の再生信号処理部は、光記録媒体からの再生信号に残留する非線形雑音成分を効果的に抑圧する。具体的には、再生信号処理部は、オフセット成分の抑圧処理と、非線形歪成分の抑圧処理と、相関雑音成分の抑圧処理とを順番に実施する。
再生信号処理部は、図1に示されるように、バンドパスフィルタ100と、オフセットキャンセラ110と、AGC(Auto Gain Controller)120と、ITR(Interpolated Timing Recovery)121と、PLL(Phase Locked Loop)122と、ボルテラフィルタ130と、タップコントローラ140と、ARMLフィルタ150と、ノイズ推定器160と、誤り訂正部170とを備える。
バンドパスタフィルタ100及びオフセットキャンセラ110はオフセット抑圧部として機能する。ボルテラフィルタ130及びタップコントローラ140は、非線形歪抑圧部として機能する。ARMLフィルタ150及びノイズ推定器160は、相関雑音抑圧部として機能する。また、ITR121及びPLL122は、同期処理部として機能する。
オフセット抑圧部は、入力信号の中心レベルを零に近付ける信号処理を行うことによって、当該入力信号に残留するオフセット成分を抑圧する。
バンドパスフィルタ100は、図示しない光記録媒体から読み取られた再生信号を入力する。バンドパスフィルタ100は、入力した再生信号のうち所望の帯域内の信号成分を通過させ、当該帯域外の信号成分を抑圧する。バンドパスフィルタ100は、フィルタ処理された信号をオフセットキャンセラ110へと出力する。バンドパスフィルタ100は、IIR(Infinite Impulse Response)フィルタまたはFIRフィルタを用いて実装可能である。また、バンドパスフィルタ100は、ハイパスフィルタに置き換えられてもよい。
バンドパスフィルタ100は、図示しない光記録媒体から読み取られた再生信号を入力する。バンドパスフィルタ100は、入力した再生信号のうち所望の帯域内の信号成分を通過させ、当該帯域外の信号成分を抑圧する。バンドパスフィルタ100は、フィルタ処理された信号をオフセットキャンセラ110へと出力する。バンドパスフィルタ100は、IIR(Infinite Impulse Response)フィルタまたはFIRフィルタを用いて実装可能である。また、バンドパスフィルタ100は、ハイパスフィルタに置き換えられてもよい。
オフセットキャンセラ110は、バンドパスフィルタ100から信号を入力する。オフセットキャンセラ110は、入力信号に残留するオフセット成分を抑圧し、オフセット抑圧された信号をAGC120へと出力する。具体的には、オフセットキャンセラ110は、入力信号から当該入力信号のDC成分を減算することによって、当該入力信号のオフセット成分を抑圧することができる。
オフセットキャンセラ110は、例えば図2に示されるように、減算器111と、加算器112と、遅延器113と、増幅器114及び115とを備える。図2のオフセットキャンセラ110の制御帯域は、増幅器114及び115のゲインを介して調整することができる。
減算器111は、増幅器115からフィードバックされた信号を入力信号から減算することによって出力信号を得る。加算器112は、減算器111からの出力信号と、増幅器114からフィードバックされた信号とを加算し、遅延器113へと出力する。
遅延器113は、加算器112から信号を入力し、遅延を与える。遅延器113は、遅延された信号を増幅器114及び115へと出力する。増幅器114は、遅延器113から遅延された信号を入力し、ゲインに応じて振幅を調整してから加算器112へとフィードバックする。増幅器115は、遅延器113から遅延された信号を入力し、ゲインに応じて振幅を調整してから減算器111へとフィードバックする。
AGC120は、オフセット抑圧部からオフセット抑圧された信号を入力する。AGC120は、入力信号の振幅が所望の値に近づくように、その振幅を自動的に調整する。AGC120は、振幅調整された信号を同期処理部へと出力する。
同期処理部は、AGC120から振幅調整された信号を入力する。同期処理部は、入力信号における周波数の時間的な変動を調整する。同期処理部は、同期処理された信号を非線形歪抑圧部へと出力する。
非線形歪抑圧部のうちボルテラフィルタ130は、入力信号に残留する非線形歪成分(例えば、波形の上下非対称性など)を抑圧する。更に、非線形歪抑圧部のうちタップコントローラ140は、ボルテラフィルタ130のタップ係数を動的に更新する。故に、入力信号に残留する非線形歪成分が時間的に変動しても、非線形歪抑圧部は安定的に非線形歪成分を抑圧することができる。前述の通り、非線形歪抑圧部はオフセット抑圧された信号を入力する。故に、オフセット成分に起因する波形のずれが上下非対称成分として誤って抑圧される事態を防止できる。また、非線形歪抑圧部のボルテラフィルタ130の制御帯域をオフセット抑圧部の制御帯域を低く設定することにより、ボルテラフィルタ130を安定的に適応制御することが可能となる。
ボルテラフィルタ130は、同期処理部から同期処理された信号を入力する。ボルテラフィルタ130は、入力信号に対してボルテラフィルタ処理を行い、フィルタ処理された信号をタップコントローラ140及び相関雑音抑圧部へと出力する。ボルテラフィルタ130は、例えば図1に示されるように、1次項のためのフィルタ演算器131と、2次項のためのフィルタ演算器132と、3次項のためのフィルタ演算器133とを備えることができる。即ち、図1のボルテラフィルタ130は、3次のフィルタ処理を行うことができる。具体的には、ボルテラフィルタ130は、下記数式(1)に示されるフィルタ処理を行うことができる。

数式(1)において、右辺第1項は1次フィルタ演算(即ち、線形フィルタ演算)を表し、右辺第2項は2次フィルタ演算を表し、右辺第3項は3次フィルタ演算を表す。尚、数式(1)によれば、線形フィルタ演算は、通常のFIRフィルタ処理に相当する。数式(1)のフィルタ処理によれば、2次歪成分(例えば、波形の上下非対称性)に加えてより高次の歪成分を抑圧することができる。
数式(1)において、x(t)はボルテラフィルタ130の入力信号を表し、y(t)はボルテラフィルタ130の出力信号を表す。また、h1は線形フィルタ演算のためのタップ係数を表し、h2は2次フィルタ演算のためのタップ係数を表し、h3は3次フィルタ演算のためのタップ係数を表す。tは、サンプルタイミングを表す。t’及びt’’は、2次フィルタ演算及び3次フィルタ演算に関する遅延が補償されたサンプルタイミングを表す。iは線形フィルタ演算においてタップ番号を特定する変数であり、Iは線形フィルタ演算におけるタップ長を表す。j,kは2次フィルタ演算においてタップ番号を特定する変数であり、J,Kは2次フィルタ演算におけるタップ長を表す。尚、J,Kは、同一の値であってもよいし、相異なる値であってもよい。f,g,hは3次フィルタ演算においてタップ番号を特定する変数であり、F,G,Hは3次フィルタ演算においてタップ長を表す。F,G,Hは、同一の値であってもよいし、相異なる値であってもよい。尚、ボルテラフィルタ130が使用するタップ係数(=h1,h2,h3)は、タップコントローラ140によって動的に更新される。
タップコントローラ140は、ボルテラフィルタ130が使用するタップ係数を更新する。タップコントローラ140は、更新されたタップ係数をボルテラフィルタ130へと逐次出力する。タップコントローラ140は、例えば図1に示されるように、線形フィルタ演算のためのタップ係数算出器141と、2次フィルタ演算のためのタップ係数算出器142と、3次フィルタ演算のためのタップ係数算出器143とを備えることができる。タップコントローラ140は、具体的には、下記数式(2)に従ってタップ係数を更新する。

数式(2)において、μ1は線形フィルタ演算のためのステップサイズパラメータを表し、μ2は2次フィルタ演算のためのステップサイズパラメータを表し、μ3は3次フィルタ演算のためのステップサイズパラメータを表す。尚、ボルテラフィルタ130の制御帯域は、ステップサイズパラメータを介して調整できる。
また、数式(2)において、e(t)=d(t)-y(t)であり、d(t)は復号結果とPR(Partial Response)クラスとに基づいて算出される理想信号レベルを表す。数式(2)はLMS(Least Mean Square)法に基づいている。但し、タップコントローラ140は、LMS以外の技法に基づいてタップ係数を更新してもよい。
相関雑音抑圧部のうちノイズ推定器160は、AR(Auto-Regressive)モデルに基づいて、入力信号に残留する相関雑音成分を推定する。相関雑音抑圧部のうちARMLフィルタ150は、入力信号に残留する相関雑音成分を抑圧する。
後述されるように、ノイズ推定器160は、過去に入力信号に混入した白色雑音が相関雑音成分に変換されて入力信号に加算されるという仮定に基づいている。故に、入力信号において有色雑音としての非線形歪成分が十分に抑圧されていなければ、ノイズ推定器160による相関雑音成分の推定精度が劣化し、結果的にARMLフィルタ150が有効に機能しないおそれがある。しかしながら、相関雑音抑圧部は非線形歪が抑圧された信号を入力する。故に、相関雑音成分の推定において非線形歪成分が悪影響を及ぼす事態を防止できる。
また、相関雑音抑圧部のARMLフィルタ150の制御帯域を非線形歪抑圧部のボルテラフィルタ130の制御帯域に比べて低く設定することにより、ARMLフィルタ150を安定的に適応制御することができる。
ARMLフィルタ150は、ARモデルで表現された相関雑音を効果的に抑圧できるMLフィルタである。ARモデルにおいて、雑音の自己相関が仮定される。具体的には、ARMLフィルタ150は、線形な白色雑音ではなく、入力信号のパターン毎に強度が異なり、かつ、時間的な相関性を持つ有色雑音を対象に等化を行う。故に、入力信号にパターン依存性のある雑音成分や時間的な相関性を持つ雑音成分が残留していたとしても、ARMLフィルタ150は係る雑音成分を効果的に抑圧できる。
MLフィルタは、ビタビアルゴリズム、BCJR(Bahl-Cocke-Jelinek-Raviv)アルゴリズム、MLM(Max-Log-Map)アルゴリズムまたはSOVA(Soft Output Viterbi Algorithm)などに基づいて実現される。例えば、MLフィルタの後段において硬判定結果(即ち、1または0の2値データ)に対する誤り訂正処理(例えば、リードソロモン符号の復号処理)が行われる場合には、MLフィルタは硬判定結果を出力するアルゴリズム(例えば、ビタビ等化アルゴリズム)に基づいて構成される。他方、MLフィルタの後段において軟判定結果に対する誤り訂正処理(例えば、LDPC(Low Density Parity Check)符号の復号処理)が行われる場合には、MLフィルタは軟判定結果を出力するアルゴリズム(例えば、BCJRアルゴリズム、MLMアルゴリズムまたはSOVAアルゴリズム)に基づいて構成される。
ARMLフィルタ150は、ブランチ毎にメトリックと呼ばれる尤度指標を計算し、当該メトリックに基づいて最も確からしいパスを判定することによって、再生信号の硬判定結果または軟判定結果を得る。ARMLフィルタ150は、再生信号の硬判定結果または軟判定結果をノイズ推定器160及び誤り訂正部170へと出力する。
ここで、ブランチとは所与の時刻のステートから次の時刻のステートへの遷移を指しており、ブランチ毎に理想信号を導出することができる。パスとは所与の時刻のステートに至るまでに通過した1以上のブランチを連結したものである。ステートは、例えば図3に示されるように、所与の時刻とその1つ前の時刻とにおいて発生可能なデータパターン毎に定義される。例えば、ステート=(0,0)に注目すると、ステート=(0,0)へのブランチM1と、ステート=(0,1)へのブランチM2とが存在する。同様に、ステート(1,1)に注目すると、ステート(1,0)へのブランチM7とステート(1,1)へのブランチM8とが存在する。例えばビタビアルゴリズムによれば、パスを構成するブランチのメトリックが積算され、メトリック積算値の最も小さいパスが最も確からしいと評価される。
MLフィルタにおけるメトリックは、例えば下記数式(3)に従って計算できる。

数式(3)においてωは、ブランチを特定する変数を表す。即ち、Mωはブランチ=ωのメトリックである。数式(3)によれば、メトリックは、ブランチに対応する確率密度関数=PDNormωを対数化したものである。そして、この確率密度関数は、白色雑音の標準偏差=σと、ブランチ=ωに対応する理想信号=sωと、理想信号からのオフセット誤差=mωと、入力信号=yとに基づいて計算することができる。
他方、ARMLフィルタ150は、メトリックを下記数式(4)に従って計算できる。

数式(4)において、M[AR]ωはブランチ=ωのメトリックを表す。Lは雑音相関長を表し、wωはブランチ=ωに対応する雑音の相関係数セットを表す。数式(4)によれば、ARMLフィルタ150は、ブランチ=ωに対応する白色雑音の標準偏差=σωと、ブランチ=ωに対応する理想信号sωと、理想信号からのオフセット誤差=mωと、入力信号=yと、雑音の相関係数セット=wωとに基づいてメトリックを計算できる。尚、オフセット誤差、白色雑音の標準偏差及び雑音の相関係数セットは、ノイズ推定器160によって推定される。
ノイズ推定器160は、図4に例示される雑音モデルに基づいて、ブランチ=ω毎に、オフセット誤差mωと、白色雑音の標準偏差σωと、雑音の相関係数セットwωとを推定する。具体的には、ノイズ推定器160は、入力信号=dkに対して図4の雑音モデルに従って発生した雑音が混入して再生信号=ykが得られたという仮定に基づいて、オフセット誤差と、白色雑音の標準偏差と、雑音の相関係数セットとを推定する。図4の雑音モデルによれば、ブランチ=ωに対応する理想信号=sω毎に異なるオフセット誤差mωが加算される。また、図4の雑音モデルによれば、白色雑音を起源として、サンプル間で相関性のある雑音が発生している。即ち、過去に混入した白色雑音が、ブランチ=ω毎に異なる雑音の相関係数セット=wωによって相関雑音に変換されて入力信号に加算される。
図4の雑音モデルによれば、再生信号=yk及び理想信号=sωに基づいて、オフセット誤差mω、白色雑音の標準偏差σω及び雑音の相関係数セットwωを数学的に算出することが可能となる。ノイズ推定器160は、非線形歪抑圧部からの出力信号(即ち、ボルテラフィルタ130によってフィルタ処理された信号)を上記再生信号=ykとして入力し、ARMLフィルタ150からの出力信号をPRチャネル等化することによって得られる信号を上記理想信号=sωとして利用する。
例えば、ノイズ推定器160は、図5に示されるように、2値化器161と、PRチャネルフィルタ162と、減算器163と、セレクタ164と、ブランチ=ω毎の算出器セットとを備える。
2値化器161は、ARMLフィルタ150からの出力信号を2値化し、PRチャネルフィルタ162へと出力する。尚、ARMLフィルタ150が2値信号(即ち、硬判定結果)を出力する場合には、2値化器161は不要である。
2値化器161は、ARMLフィルタ150からの出力信号を2値化し、PRチャネルフィルタ162へと出力する。尚、ARMLフィルタ150が2値信号(即ち、硬判定結果)を出力する場合には、2値化器161は不要である。
PRチャネルフィルタ162は、2値化器161(或いはARMLフィルタ150)から2値信号を入力する。PRチャネルフィルタ162は、2値信号に対してPRクラスに応じたフィルタ処理を行い、理想信号を生成する。例えば、信号処理において採用されるPRクラスが12221であるならば、PRチャネルフィルタ162はタップ係数[1,2,2,2,1]を用いるFIRフィルタによって実装できる。PRチャネルフィルタ162は、理想信号を減算器163へと出力する。
減算器163は、非線形雑音抑圧部の出力信号を再生信号として入力し、PRチャネルフィルタ162から理想信号を入力する。減算器163は、再生信号から理想信号を減算し、差分信号(即ち、雑音成分)をセレクタ164へと出力する。
セレクタ164は、ARMLフィルタ150によって判定されたブランチ=ωを参照し、減算器163からの差分信号を当該ブランチに対応する算出器セットへと出力する。差分信号が与えられた算出器セットは、図4の雑音モデルに基づいて、ブランチ=ωに対応する、オフセット誤差mω、白色雑音の標準偏差σω及び雑音の相関係数セットwωを算出する。算出されたオフセット誤差mω、白色雑音の標準偏差σω及び雑音の相関係数セットwωは、ローパスフィルタ(LPF)を経由してARMLフィルタ150内のメトリック算出部(図示されない)へと出力される。
尚、ノイズ推定器160は、例えば、雑音パラメータ(即ち、算出されたオフセット誤差mω、白色雑音の標準偏差σω及び雑音の相関係数セットwω)を算出するために参照される入力信号のサンプル数、LPFの帯域などを介して、ARMLフィルタ150の制御帯域を調整できる。また、ノイズ推定器160は、図5に例示されるように雑音パラメータを逐次更新してもよいし、これと異なるやり方で雑音パラメータを更新してもよい。具体的には、ノイズ推定器160は、入力信号の一部をトレーニング部分として利用して雑音パラメータの初期値を算出し、当該初期値を次の更新タイミングまで継続使用してもよい。この場合には、ノイズ推定器160は、更新タイミングの周期を介してARMLフィルタ150の制御帯域を調整できる。
誤り訂正部170は、ARMLフィルタ150から再生信号の硬判定結果または軟判定結果を入力する。誤り訂正部170は、データ記録時に施されたインタリーブ処理に対応するデインタリーブ処理を行う。それから、誤り訂正部170は、データ記録時に施された誤り訂正符号化(例えば、リードソロモン符号化、LDPC符号化など)に対応する誤り訂正復号を行うことにより、再生データを得る。誤り訂正部170によって得られた再生データは外部に出力される。
本実施形態に係る情報記録再生装置は、例えば図6Aに示される仕様を満足する光記録媒体からデータを再生できる。図6Aの仕様によれば、情報記録層タイプは追記型であり、チャネルビット長は55.87[nm]であり、トラックピッチは0.32[μm]である。各情報記録層におけるデータの記録容量は33.4GBであり、各情報記録層における反射率は2%程度であり、データは17変調方式によって変調された状態で記録される。
他方、本実施形態に係る情報記録再生装置は、例えば図6Bに示される仕様を満足する。図6Bの仕様によれば、対物レンズのNAは0.85であり、データの記録再生に用いられるレーザの波長は405[nm]であり、再生パワーは1.2[mW]である。信号処理において採用されるPRクラスは12221であり、チャネルビットレートは132Mbpsである。ボルテラフィルタ130の次数は3であり、線形フィルタ演算のタップ数は13であり、2次フィルタ演算のタップ数は13×13であり、3次フィルタ演算のタップ数は7×7×7である。ARMLフィルタ150において相関雑音長(=L)は2ビットに設定される。
以降、実験の結果を参照しながら本実施形態に係る情報記録再生装置の効果が説明される。尚、本実験において用いられた光記録媒体は、図6Aに示される仕様を満たす。
本実験において本実施形態に対する比較方式(便宜的に第1の比較方式と称される)が用意された。第1の比較方式に係る情報記録再生装置は、図7に示される再生信号処理部を備える。図7の再生信号処理部は、バンドパスフィルタ201と、オフセットキャンセラ202と、AGC203と、ITR204と、PLL205と、FIRフィルタ206と、タップコントローラ207と、MLフィルタ208と、参照レベル検出器209と、誤り訂正部210とを備える。
本実験において本実施形態に対する比較方式(便宜的に第1の比較方式と称される)が用意された。第1の比較方式に係る情報記録再生装置は、図7に示される再生信号処理部を備える。図7の再生信号処理部は、バンドパスフィルタ201と、オフセットキャンセラ202と、AGC203と、ITR204と、PLL205と、FIRフィルタ206と、タップコントローラ207と、MLフィルタ208と、参照レベル検出器209と、誤り訂正部210とを備える。
図7の再生信号処理部は、非線形雑音成分を抑圧するための機能部において図1の再生信号処理部と異なる。具体的には、図1の非線形歪抑圧部は、図7のFIRフィルタ206及びタップコントローラ207に置き換えられている。また、図1の相関雑音抑圧部は、図7のMLフィルタ208及び参照レベル算出器209に置き換えられている。他方、図7のバンドパスフィルタ201、オフセットキャンセラ202、AGC203、ITR204、PLL205及び誤り訂正部210は、図1のバンドパスフィルタ100、オフセットキャンセラ110、AGC120、ITR121、PLL122及び誤り訂正部170に相当する。
FIRフィルタ206は、タップコントローラ207から与えられるタップ係数を用いて入力信号に対してFIRフィルタ処理を行う。MLフィルタ208は、ARモデルに基づく雑音成分を考慮しない点でARMLフィルタ150と異なる。参照レベル算出器209は、上記数式(3)に示されるブランチ=ωに対応する理想信号からのオフセット誤差=mωを算出し、MLフィルタ208へと出力する。
本実験では、更に、第1の比較方式においてMLフィルタ208及び参照レベル算出器209を図1の相関雑音抑圧部に置き換えたもの(便宜的に第2の比較方式と称される)と、第1の比較方式においてFIRフィルタ206及びタップコントローラ207を図1の非線形歪抑圧分に置き換えたもの(第3の比較方式と称される)とが用意された。
図8A及び図8Bは、タンジェンシャルチルトに対するチャネルビットエラー率特性の実験結果を示す。図8Aには、第1の比較方式、第2の比較方式及び第3の比較方式の実験結果が描かれている。ここで、タンジェンシャルチルトとは、光記録媒体の再生時における当該光記録媒体の接線方向の傾き[degree]を意味する。
図8Aによれば、第2の比較方式及び第3の比較方式は、第1の比較方式に比べて必ずしも良好な特性を示さなかった。換言すれば、第1の比較方式に対して図1の非線形歪抑圧部及び相関雑音抑圧部の一方のみを導入したとしても、図6Aに示される仕様を満足する光記録媒体に対して良好な特性を安定的に達成することは困難である。
他方、図8Bには、第1の比較方式の実験結果に加えて提案方式(即ち、本実施形態に係る情報記録再生装置)の実験結果が描かれている。図8Bによれば、提案方式は広範囲に亘って第1の比較方式よりも良好な特性を達成した。よって、少なくともタンジェンシャルチルトに関して、提案方式は図6Aに示される仕様を満足する光記録媒体に対して良好な特性を安定的に達成できる。
図9A及び図9Bは、記録パルス幅のずれに対するチャネルビットエラー率特性の実験結果を示す。図9Aには、第1の比較方式、第2の比較方式及び第3の比較方式の実験結果が描かれている。ここで、記録パルス幅のずれとは、光記録媒体への記録時における記録パルス幅の最適値からのずれ[T]を意味する。一般に、記録パルス幅が最適値からずれると、光記録媒体に記録されるマークサイズが変化する。この変化は、再生信号において非線形雑音成分を発生させる要因となる。
図9Aによれば、第2の比較方式及び第3の比較方式は、第1の比較方式に比べて必ずしも良好な特性を示さなかった。換言すれば、第1の比較方式に対して図1の非線形歪抑圧部及び相関雑音抑圧部の一方のみを導入したとしても、図6Aに示される仕様を満足する光記録媒体に対して良好な特性を安定的に達成することは困難である。
他方、図9Bには、第1の比較方式の実験結果に加えて提案方式の実験結果が描かれている。図9Bによれば、提案方式は広範囲に亘って第1の比較方式よりも良好な特性を達成した。よって、少なくとも記録パルス幅に関して、提案方式は図6Aに示される仕様を満足する光記録媒体に対して良好な特性を安定的に達成できる。
図10A及び図10Bは、記録パワー誤差に対するチャネルビットエラー率特性の実験結果を示す。図10Aには、第1の比較方式、第2の比較方式及び第3の比較方式の実験結果が描かれている。ここで、記録パワー誤差とは、光記録媒体への記録時における記録パワーの最適値に対する誤差[%]を意味する。一般に、記録パワーが最適値からずれると、光記録媒体に記録されるマークサイズが変化する。この変化は、再生信号において非線形雑音成分を発生させる要因となる。
図10Aによれば、第2の比較方式及び第3の比較方式は、第1の比較方式に比べて必ずしも良好な特性を示さなかった。換言すれば、第1の比較方式に対して図1の非線形歪抑圧部及び相関雑音抑圧部の一方のみを導入したとしても、図6Aに示される仕様を満足する光記録媒体に対して良好な特性を安定的に達成することは困難である。
他方、図10Bには、第1の比較方式の実験結果に加えて提案方式の実験結果が描かれている。図10Bによれば、提案方式は広範囲に亘って第1の比較方式よりも良好な特性を達成した。よって、少なくとも記録パワーに関して、提案方式は図6Aに示される仕様を満足する光記録媒体に対して良好な特性を安定的に達成できる。
図8A、図8B、図9A、図9B、図10A及び図10Bに示される実験結果から、各方式の各記録再生条件に関するシステムマージンが図11に示されるように評価できる。システムマージンは、各種記録条件について許容可能な誤差に相当する。即ち、各種記録条件についての誤差に応じて再生特性は劣化するが、当該誤差がシステムマージンに収まっていれば誤り訂正処理などによって正しい再生データを得ることが可能である。
図11のシステムマージンを見積もるための閾値として、チャネルビットエラー率=1.0E-4が用いられた。この閾値は、誤り訂正部170に適用されることが想定される誤り訂正符号方式の訂正能力を考慮すれば妥当な値である。図11によると、提案方式は、いずれの記録再生条件に関しても第1の比較方式、第2の比較方式及び第3の比較方式に比べて大きなシステムマージンを確保できる。
特に、記録パワーに関して言及すると、第1の比較方式、第2の比較方式及び第3の比較方式のマージンはいずれも25~26%程度であったのに対して提案方式のマージンは8ポイント以上高い34%であった。尚、光記録媒体における記録パワーのマージンは、一般的に20~25%程度である。
前述のように、本実施形態に係る情報記録再生装置において種々の信号処理パラメータが設定可能である。具体的には、雑音抑圧部の制御帯域、ボルテラフィルタ130において使用されるタップ数及びボルテラフィルタ130の制御帯域、ARMLフィルタ150において使用される雑音相関長、ARMLフィルタ150の制御帯域などが設定可能な信号処理パラメータとして用意される。以降、これらパラメータの設定例が言及される。
図20Aは、本実施形態に係る情報記録再生装置におけるオフセット抑圧部の制御帯域を変化させた場合のi-MLSEの測定値が示されている。図20Aにおいて、横軸はオフセット抑圧部の制御帯域を表し、縦軸はi-MLSEを表している。i-MLSEは、非特許文献1に開示される性能評価指標である。i-MLSEが小さいほど、等化された信号に残留する雑音成分が小さく、データを安定的に再生可能であると評価することができる。図20Aによれば、オフセット抑圧部の制御帯域は概ね15kHzから25kHzの間の範囲で設定されることが好ましい。
図20Bは、本実施形態に係る情報記録再生装置におけるボルテラフィルタ130における処理サンプル数の増加に対するi-MLSEの変化を示す。図20Bでは比較のために、ステップサイズパラメータを段階的に小さく設定することにより条件1-7が用意された。即ち、条件1のステップサイズパラメータが最も大きく、条件7のステップサイズパラメータが最も小さい。
一般に、タップコントローラ140がタップ係数を適応制御するので、処理サンプル数の増大に伴ってi-MLSEは良好な値へと次第に収束する。そして、収束するまでに必要とされる処理サンプル数(換言すれば、時間)は、制御帯域が高いほど(即ち、ステップサイズパラメータが大きいほど)小さい。
条件3-7に関して言及すると、処理サンプル数の増大に伴ってi-MLSEは良好な値へと次第に収束している。また、ステップサイズパラメータが小さい条件ほど収束するまでに要する処理サンプル数が大きい。しかしながら、ステップサイズパラメータを過剰に大きくすることは必ずしも好ましくない。条件1-2に関して言及すると、処理サンプル数が増大してもi-MLSEは改善せずに寧ろ若干悪化している。
以上の結果を考慮すると、条件3-7のうちステップサイズパラメータの大きいものを参考にして、ボルテラフィルタ130の制御帯域を設定することが好ましい。例えば、条件4の下では、処理サンプル数が概ね2×106に達した時に、i-MLSEが良好な値に収束している(換言すれば、タップ係数の適応制御が収束している)。チャネルビットレート=132Mbpsとすると、2×106のサンプルは1.5msecの時間に相当する。即ち、条件4の下でのボルテラフィルタ130の制御帯域は0.7kHz程度となる。図20Bによれば、ボルテラフィルタ130の制御帯域は概ね0.7kHz以下の範囲で設定されることが好ましい。
図20Cは、本実施形態に係る情報記録再生装置におけるノイズ推定器160において推定されたあるパターンの雑音成分の周波数特性を示している。この周波数特性によると100Hzから低域側(概ね60Hz付近)に大きな盛り上がりが出現している。また、200Hzから高域側には断続的に複数の大きな盛り上がりが出現している。100Hzから低域側の雑音成分は、ARMLフィルタ150の適応制御によって抑圧されるべきものである。他方、200Hzから高域側の雑音成分はノイズ推定器160による推定のばらつきに起因する成分である。故に、ARMLフィルタ150の制御帯域は例えば300Hzよりも低く設定されることが好ましい。
図21Aは、本実施形態に係る情報記録再生装置におけるボルテラフィルタ130の線形フィルタ演算において使用されるタップ数を変化させた場合のi-MLSEの測定値を示す。図21Aによれば、概ね7以上11以下の範囲ではタップ数の増加に伴ってi-MLSEが改善するものの、11以上の範囲ではi-MLSEの改善幅が小さい。故に、ボルテラフィルタ130の線形フィルタ演算において使用されるタップ数は、11以上であることが好ましい。
図21Bは、本実施形態に係る情報記録再生装置におけるボルテラフィルタ130の2次フィルタ演算において使用されるタップ数を変化させた場合のi-MLSEの測定値を示す。図21Bによれば、概ね112以下の範囲ではタップ数の増加に伴ってi-MLSEが改善するものの、112以上の範囲ではi-MLSEの改善幅が小さい。故に、ボルテラフィルタ130の2次フィルタ演算において使用されるタップ数は、112以上であることが好ましい。
図21Cは、本実施形態に係る情報記録再生装置におけるボルテラフィルタ130の3次フィルタ演算において使用されるタップ数を変化させた場合のi-MLSEの測定値を示す。図21Cによれば、概ね53以下の範囲ではi-MLSEの改善幅が小さい。故に、ボルテラフィルタの3次フィルタ演算において使用されるタップ数は、53以上であることが好ましい。
図22は、光記録媒体のマークジッタの変化に対する本実施形態に係る情報記録再生装置におけるARMLフィルタ150の出力信号にチャネルビットエラー率の変化を示している。図22では比較のために、ARMLフィルタ150において使用される雑音相関長を0ビット、1ビット、2ビット及び3ビットに設定した場合の結果が描かれている。図23によれば、雑音相関長が1ビットの場合には、雑音相関長が0ビットの場合(即ち、ARMLフィルタ150が通常のMLフィルタに相当する場合)に比べてチャネルビットエラー率が劣化している。他方、雑音相関長を2ビットに増大させると、チャネルビットエラー率が大きく改善している。尚、雑音相関長が2ビットの場合と3ビットの場合とではチャネルビットエラー率に大きな差異は見られない。従って、ARMLフィルタ150において使用される雑音相関長は、2ビット以上であることが好ましい。
図20A、図20B、図21C、図21A、図21B、図21C及び図22を考慮すると、種々の信号処理パラメータは以下に例示される値に設定されてよい。
オフセット抑圧部の制御帯域は20kHzに設定され、ボルテラフィルタ130の制御帯域は0.7kHzに設定され、ARMLフィルタ150の制御帯域は200kHz以下に設定される。尚、この設定によれば、オフセット抑圧部、ボルテラフィルタ130及びARMLフィルタ150の制御帯域が順番に低くなるので、ボルテラフィルタ130及びARMLフィルタ150を安定的に適応制御することができる。ボルテラフィルタ130の線形フィルタ演算において使用されるタップ数は13に設定され、2次フィルタ演算において使用されるタップ数は13×13に設定され、3次フィルタ演算において使用されるタップ数は7×7×7に設定される。ARMLフィルタ150において使用される雑音相関長は2ビットに設定される。
オフセット抑圧部の制御帯域は20kHzに設定され、ボルテラフィルタ130の制御帯域は0.7kHzに設定され、ARMLフィルタ150の制御帯域は200kHz以下に設定される。尚、この設定によれば、オフセット抑圧部、ボルテラフィルタ130及びARMLフィルタ150の制御帯域が順番に低くなるので、ボルテラフィルタ130及びARMLフィルタ150を安定的に適応制御することができる。ボルテラフィルタ130の線形フィルタ演算において使用されるタップ数は13に設定され、2次フィルタ演算において使用されるタップ数は13×13に設定され、3次フィルタ演算において使用されるタップ数は7×7×7に設定される。ARMLフィルタ150において使用される雑音相関長は2ビットに設定される。
以上説明したように、第1の実施形態に係る情報記録再生装置は、再生信号に対してオフセット抑圧と、非線形歪抑圧と、相関雑音抑圧とを順番に適用する。従って、この情報記録再生装置によれば、光記録媒体から読み出された再生信号に残留する非線形雑音成分が効果的に抑圧され、光記録媒体から安定的にデータを再生することができる。また、この情報記録再生装置によれば、種々の記録再生条件について大きなシステムマージンを確保することができる。
(第2の実施形態)
第2の実施形態に係る情報記録再生装置は、図17に示されるように、PUH(Pick Up Head)300と、サーボ処理回路320と、信号処理回路340とを備える。図17の情報記録再生装置は、サーボ層を備え、かつ、情報記録層が多層化された光記録媒体に対してデータを記録再生できる。尚、図17において、実線矢印は電気信号の流れを表しており、一点鎖線は青色レーザ(情報記録層用のレーザ)の流れを表しており、破線矢印は赤色レーザ(サーボ層用のレーザ)の流れを表している。
第2の実施形態に係る情報記録再生装置は、図17に示されるように、PUH(Pick Up Head)300と、サーボ処理回路320と、信号処理回路340とを備える。図17の情報記録再生装置は、サーボ層を備え、かつ、情報記録層が多層化された光記録媒体に対してデータを記録再生できる。尚、図17において、実線矢印は電気信号の流れを表しており、一点鎖線は青色レーザ(情報記録層用のレーザ)の流れを表しており、破線矢印は赤色レーザ(サーボ層用のレーザ)の流れを表している。
PUH300は、サーボ層用のレーザ及び情報記録層用のレーザを発生する。PUH300は、レーザの一部を光記録媒体に照射し、残部を電気信号の形式でサーボ処理回路320へと出力する。また、PUH300は、光記録媒体からの戻り光を電気信号の形式でサーボ処理回路320へと出力する。
PUH300は、赤色レーザダイオード(LD)301と、青色LD302と、光学系303と、赤色レーザ用フロントモニタ304と、青色レーザ用フロントモニタ305と、赤色レーザ用収差補正機構306と、青色レーザ用収差補正機構307と、対物レンズ308と、対物レンズ駆動機構309と、赤色レーザ用受光素子310と、青色レーザ用受光素子311と、赤色レーザ用駆動回路312と、青色レーザ用駆動回路313とを備える。
LD301は、サーボ層用の赤色レーザの光源である。赤色レーザの波長は650nm程度である。レーザ駆動回路312は、後述されるパワー制御回路321からの制御信号に従って、LD301が発生するレーザの強度を制御する。LD302は、情報記録層用の青色レーザの光源である。青色レーザの波長は405nm程度である。レーザ駆動回路313は、後述されるパワー制御回路323及びパルス変調回路324からの制御信号に従って、LD302が発生するレーザの強度を制御する。尚、レーザ駆動回路312及び313は、LD301及び302を同時に点灯できる。
LD301が点灯中に発生する赤色レーザは、光学系303に入射する。光学系303は、赤色レーザをフロントモニタ用の光と媒体照射用の光とに分割する。フロントモニタ用の光はフロントモニタ304へと集光され、媒体照射用の光は収差補正機構306及び対物レンズ308を経由して光記録媒体のサーボ層へと集光される。そして、サーボ層からの戻り光は、対物レンズ308、収差補正機構306及び光学系303を経由して受光素子310へと導かれる。受光素子310は、受け取った光を電気信号に変換して後述されるフォーカス制御回路325、トラッキング制御回路326及びプリアンプ327へと出力する。
フロントモニタ304は、フロントモニタ用の光を電気信号に変換してパワー制御回路321へと出力する。収差補正機構306は、後述される収差制御回路333からの制御信号に基づいて、自己を通過するレーザ光(媒体照射用の光及びサーボ層からの戻り光)に種々の収差(例えば、球面、非点、コマ)を与えることによって、波面収差を制御する。また、収差補正機構306は、フォーカス制御回路325からのフォーカス誤差信号に基づいて、赤色レーザの集光スポットを所望のサーボ層にフォーカスする。
LD302が点灯中に発生する青色レーザは、光学系303に入射する。光学系303は、青色レーザをフロントモニタ用の光と媒体照射用の光とに分割する。フロントモニタ用の光はフロントモニタ305へと集光され、媒体照射用の光は収差補正機構307及び対物レンズ308を経由して光記録媒体の情報記録層へと集光される。そして、情報記録層からの戻り光は、対物レンズ308、収差補正機構307及び光学系303を経由して受光素子311へと導かれる。受光素子311は、受け取った光を電気信号に変換して後述されるフォーカス制御回路329、トラッキング制御回路330及びプリアンプ331へと出力する。
フロントモニタ305は、フロントモニタ用の光を電気信号に変換してサンプル/ホールド回路(S/H)322へと出力する。収差補正機構307は、後述される収差制御回路334からの制御信号に基づいて、自己を通過するレーザ光(媒体照射用の光及びサーボ層からの戻り光)に種々の収差(例えば、球面、非点、コマ)を与えることによって、波面収差を制御する。
対物レンズ308は、対物レンズ駆動機構309によって、フォーカス方向またはトラッキング方向に駆動されたり、チルト状態が制御されたりする。
対物レンズ駆動機構309は、光記録媒体に対するデータ記録時に、トラッキング制御回路326からトラッキング誤差信号を入力する。対物レンズ駆動機構309は、トラッキング誤差信号に基づいて、赤色レーザの集光スポットを所望のトラックに追従させる。尚、青色レーザの集光スポットの半径位置は、赤色レーザの集光スポットの半径位置と共に制御される。
対物レンズ駆動機構309は、光記録媒体に対するデータ記録時に、トラッキング制御回路326からトラッキング誤差信号を入力する。対物レンズ駆動機構309は、トラッキング誤差信号に基づいて、赤色レーザの集光スポットを所望のトラックに追従させる。尚、青色レーザの集光スポットの半径位置は、赤色レーザの集光スポットの半径位置と共に制御される。
対物レンズ駆動機構309は、フォーカス制御回路329からフォーカス誤差信号を入力する。対物レンズ駆動機構309は、フォーカス誤差信号に基づいて、青色レーザの集光スポットを所望の情報記録層にフォーカスさせる。
対物レンズ駆動機構309は、光記録媒体に対するデータ再生時に、トラッキング制御回路330からのトラッキング誤差信号を入力する。対物レンズ駆動機構309は、トラッキング誤差信号に基づいて、青色レーザの集光スポットを所望のトラックに追従させる。対物レンズ駆動機構309は、後述されるチルト制御回路335からの制御信号に基づいて、対物レンズ308のチルト状態を制御する。
サーボ処理回路320は、PUH300及び信号処理回路340から種々の電気信号を入力し、これらに基づいて種々の制御信号を生成し、PUH300へと出力する。
サーボ層処理回路320は、赤色レーザ用パワー制御回路321と、サンプル/ホールド回路322と、青色レーザ用パワー制御回路323と、パルス変調回路324と、赤色レーザ用フォーカス制御回路325と、赤色レーザ用トラッキング制御回路326と、赤色レーザ用プリアンプ327と、アナログデジタル変換器(A/D)328と、青色レーザ用フォーカス制御回路329と、青色レーザ用トラッキング制御回路330と、青色レーザ用プリアンプ331と、A/D332と、赤色レーザ用収差制御回路333と、青色レーザ用収差制御回路334と、チルト制御回路335とを備える。
サーボ層処理回路320は、赤色レーザ用パワー制御回路321と、サンプル/ホールド回路322と、青色レーザ用パワー制御回路323と、パルス変調回路324と、赤色レーザ用フォーカス制御回路325と、赤色レーザ用トラッキング制御回路326と、赤色レーザ用プリアンプ327と、アナログデジタル変換器(A/D)328と、青色レーザ用フォーカス制御回路329と、青色レーザ用トラッキング制御回路330と、青色レーザ用プリアンプ331と、A/D332と、赤色レーザ用収差制御回路333と、青色レーザ用収差制御回路334と、チルト制御回路335とを備える。
パワー制御回路321は、フロントモニタ304から電気信号を入力する。パワー制御回路321は、入力電気信号を所望値に近づけるための制御信号を生成し、レーザ駆動回路312へとフィードバックする。
サンプル/ホールド回路322は、パルス変調回路324から出力される制御信号によってタイミング制御される。サンプル/ホールド回路322は、フロントモニタ305からの電気信号をサンプル/ホールドし、パワー制御回路322へと出力する。
パワー制御回路323は、サンプル/ホールド回路322から電気信号を入力する。パワー制御回路323は、入力電気信号を所望値に近付けるための制御信号を生成し、レーザ駆動回路313へとフィードバックする。
パルス変調回路324は、データの記録時に、後述されるクロック生成部341から基準クロック信号を入力し、後述される信号処理部343から記録信号(例えば、後述されるNRZI(Non Return to Zero Inversion)信号)を入力する。パルス変調回路324は、基準クロック信号及び記録信号に基づいて制御信号を生成し、レーザ駆動回路313及びサンプル/ホールド回路322へと出力する。この結果、LD302のレーザ強度がパルス状に変調される。例えば、記録データが「1」の部分においてLD302のレーザ強度は高くなり、記録データが「0」の部分でLD302は消灯される。
フォーカス制御回路325は、受光素子310から電気信号を入力する。フォーカス制御回路325は、例えばナイフエッジ法、非点収差法などに基づいて入力電気信号を演算し、フォーカス誤差信号を生成する。フォーカス制御回路325は、フォーカス誤差信号を収差補正機構306へと出力する。
トラッキング制御回路326は、光記録媒体に対するデータ記録時に、受光素子310から電気信号を入力する。トラッキング制御回路325は、例えばプッシュプル法、DPP(Differential Push-Pull)法などに基づいて入力電気信号を演算し、トラッキング誤差信号を生成する。トラッキング制御回路326は、トラッキング誤差信号を対物レンズ駆動機構309及び図示されないPUH駆動機構へと出力する。
プリアンプ327は、受光素子310から電気信号を入力する。プリアンプ327は、入力電気信号の振幅をゲインに応じて調整し、A/D328へと出力する。A/D328は、プリアンプ327から信号を入力し、アナログ-デジタル変換して信号処理回路340へと出力する。
フォーカス制御回路329は、受光素子311から電気信号を入力する。フォーカス制御回路329は、例えばナイフエッジ法、非点収差法などに基づいて入力電気信号を演算し、フォーカス誤差信号を生成する。フォーカス制御回路329は、フォーカス誤差信号を対物レンズ駆動機構309へと出力する。
トラッキング制御回路330は、光記録媒体に対するデータ再生時に、受光素子311から電気信号を入力する。トラッキング制御回路330は、例えばDPD(Differential Phase Detection)法に基づいて入力電気信号を演算し、トラッキング誤差信号を生成する。トラッキング制御回路330は、トラッキング誤差信号を対物レンズ駆動機構309及び図示されないPUH駆動機構へと出力する。
プリアンプ331は、受光素子311から電気信号を入力する。プリアンプ331は、入力電気信号の振幅をゲインに応じて調整し、A/D332へと出力する。A/D332は、プリアンプ331から信号を入力し、アナログ-デジタル変換して信号処理回路340へと出力する。
収差制御回路333は、後述される収差誤差計算部344から収差誤差データを入力し、当該収差誤差データに基づく制御信号を生成する。収差制御回路333は、制御信号を収差補正機構306へと出力する。
収差制御回路334は、後述される収差誤差計算部345から収差誤差データを入力し、当該収差誤差データに基づく制御信号を生成する。収差制御回路334は、制御信号を収差補正機構307へと出力する。
チルト制御回路335は、後述されるチルト誤差計算部346または347からチルト誤差データを入力し、当該チルト誤差データに基づく制御信号を生成する。チルト制御回路が335は、制御信号を対物レンズ駆動機構309へと出力する。
信号処理回路340は、光記録媒体からの再生信号を処理したり、光記録媒体への記録信号を生成したりする。信号処理回路340は、クロック生成部341と、アドレス処理部342と、信号処理部343と、赤色レーザ用収差誤差計算部344と、青色レーザ用収差誤差計算部345と、赤色レーザ用チルト誤差計算部346と、青色レーザ用チルト誤差計算部347とを備える。
クロック生成部341は、基準クロック信号を生成し、パルス変調回路324へと供給する。アドレス処理部342は、アドレス情報の読み出しなどのアドレス情報に関する処理を行う。読み出されたアドレス情報は、コントローラへと送信される。
信号処理部343は、図1に例示される再生信号処理部と、図示されない記録信号処理部とを含む。
記録信号処理部は、図示されないコントローラからユーザデータを入力し、当該ユーザデータを光記録媒体に記録可能なデータ列へと変換する。具体的には、記録信号処理部は、ユーザデータに対して、データパターンをランダム化するためにスクランブル処理を施したり、誤り訂正のために誤り訂正符号化(例えば、リードソロモン符号化、LDPC符号化など)したり、連続したエラーを回避するためのインタリーブ処理を施したりする。更に、記録信号処理部は、ユーザデータに対して、データの番地情報に相当するセクタ-アドレス番号を付加し、バーストエラーを検出するためのバースト検出サブコードを付加する。それから、記録信号処理部は、ランレングスを制約してユーザデータの最小反転長をコントロールするために17PP(Parity Preserved)変調またはETM(Eight to Twelve Modulation)を行い、NRZI変換を施すことによって、光記録媒体に記録可能なデータ列を得る。
記録信号処理部は、図示されないコントローラからユーザデータを入力し、当該ユーザデータを光記録媒体に記録可能なデータ列へと変換する。具体的には、記録信号処理部は、ユーザデータに対して、データパターンをランダム化するためにスクランブル処理を施したり、誤り訂正のために誤り訂正符号化(例えば、リードソロモン符号化、LDPC符号化など)したり、連続したエラーを回避するためのインタリーブ処理を施したりする。更に、記録信号処理部は、ユーザデータに対して、データの番地情報に相当するセクタ-アドレス番号を付加し、バーストエラーを検出するためのバースト検出サブコードを付加する。それから、記録信号処理部は、ランレングスを制約してユーザデータの最小反転長をコントロールするために17PP(Parity Preserved)変調またはETM(Eight to Twelve Modulation)を行い、NRZI変換を施すことによって、光記録媒体に記録可能なデータ列を得る。
再生信号処理部は、A/D328及びA/D332から再生信号を入力し、図1を参照して説明された非線形雑音成分を抑圧するための適応フィルタ処理を施す。更に、再生信号処理部は、再生信号に対して、前述のランレングスを制約する変調方式に対応する復調処理を施したり、誤り訂正符号化方式に対応する誤り訂正復号を行ったりすることによって、ユーザデータを復元する。復元されたユーザデータは、コントローラへと送信される。
収差誤差計算部344は、A/D328からデジタル信号を入力し、これに基づいて収差誤差量を計算する。収差誤差計算部344は、収差誤差データを収差制御回路333へと出力する。
収差誤差計算部345は、A/D332からデジタル信号を入力し、これに基づいて収差誤差量を計算する。収差誤差計算部345は、収差誤差データを収差制御回路334へと出力する。
チルト誤差計算部346は、A/D328からデジタル信号を入力し、これに基づいてチルト誤差量を計算する。チルト誤差計算部346は、チルト誤差データをチルト制御回路335へと出力する。
チルト誤差計算部347は、A/D332からデジタル信号を入力し、これに基づいてチルト誤差量を計算する。チルト誤差計算部347は、チルト誤差データをチルト制御回路335へと出力する。
図12Aは、本実施形態に係る情報記録再生装置が読み取り可能な、サーボ層を備える光記録媒体を例示している。図12Bは、図12AのA-A’断面図である。光記録媒体の外形はディスク状であり、その中央にはクランプ用の孔が形成されている。光記録媒体は、2層のサーボ層及び複数層の情報記録層が形成された層構造を備えている。光入射方向から見て奥側にサーボ層が設けられ、手前側に情報記録層が設けられる。より具体的には、光入射方向から見て奥側から順に、ディスク基板、サーボ層0番(SL0)、サーボ層間中間層0番(SML0)、サーボ層1番(SL1)、中間層(ML)、情報記録層0番(DL0)、情報記録層間中間層0番(DML0)、情報記録層1番(DL1)、・・・が設けられる。尚、光入射方向から見て最も手前側にはカバー層が設けられる。
図12Bに示されるように、光記録媒体の厚みは1.2mmであり、このうちディスク基板の厚みが約0.8mmである。サーボ層間中間層0番(SML0)の厚みは、サーボ層用のレーザの波長(例えば605nm)を考慮して決定されるが、例えば55μmに設計することができる。中間層(ML)の厚みは、126μmである。カバー層の厚みは、50μmである。
多重反射の影響を軽減するために、情報記録層間中間層に対して複数の種類の厚みが設計されてよい。隣接する情報記録層間中間層同士の厚みを相異なるように適切に設計すれば、非再生層からの反射光が再生層に集光しない。例えば、第1の種類の層の厚みは比較的薄く(例えば12μmに)設計され、第2の種類の層の厚みは比較的厚く(例えば16μmに)設計される。この場合には、第1の種類の層の総数が第2の種類の層の総数以上となるように設計することにより、光記録媒体の厚みを薄くできる。図12A及び図12Bに示される光記録媒体であれば、偶数番の情報記録層間中間層(DML0,DML2,・・・)を第1の種類の層として扱い、奇数番の情報記録中間層(DML1,DML3,・・・)を第2の種類の層として扱うように設計することが好ましい。尚、光記録媒体の厚みが薄くなれば、奥側の層を再生する際に発生する収差を軽減することができる。
各層の厚みは、情報記録層用のレーザの波長と、サーボ層用のレーザの波長とに基づいて設計することができる。例えば、サーボ層用のレーザの波長は情報記録層用レーザの波長に比べて長いので、層間のクロストークの影響を低減するためにサーボ層間中間層の厚みは情報記録層間中間層の厚みに比べて厚く設計される。また、サーボ層と情報記録層との間では集光スポットの層間ジャンプ動作が生じない。故に、中間層(ML)の厚みはサーボ層間中間層の厚みよりも更に厚く設計され、クロストークの影響が低減される。
サーボ層間中間層、中間層(ML)及び情報記録層間中間層は、いずれも、サーボ層用のレーザ及び情報記録層用のレーザに対して100%に近い透過率を示すように設計される。また、サーボ層は、サブミクロンオーダの厚みの金属などを材料とする膜によって構成される。特に、サーボ層0番(SL0)は、サーボ層用のレーザの一部を反射し、一部を透過する半透過特性を示す膜によって構成される。サーボ層には、後述されるように、サーボ用のガイドとなるトラックが形成されている。情報記録層は、情報記録層用のレーザによる情報の記録再生及び消去が可能な記憶材料を含む多層膜によって構成される。この多層膜は、サーボ層用レーザを透過する特性を示す。更に、この多層膜は、情報記録層用のレーザの一部を透過し、一部を反射し、一部を吸収する特性を示す。
図13には、サーボ層及び情報記録層の一例が描かれている。サーボ層には、スパイラル状のトラックが形成される。尚、サーボ層の総数が2である場合には、両サーボ層には互いに逆方向のスパイラル状にトラックが形成される。即ち、サーボ層0番(SL0)に時計回りのスパイラル状にトラックが形成されるならば、サーボ層1番(SL1)に反時計回りのスパイラル状にトラックが形成される。反対に、サーボ層0番(SL0)に反時計回りのスパイラル状にトラックが形成され、サーボ層1番(SL1)に時計回りのスパイラル状にトラックが形成されてもよい。
トラックは、連続的に形成されたグルーブ(溝)を備える。グルーブは、光記録媒体の半径方向に微小な振動(ウォブル)が与えられている。このウォブルの周波数または位相を変調したり、トラックの一部にプリピットなどの記録マークを配置したりすることによって、トラック番号及び周方向の位置を示すアドレス情報、光記録媒体の特性を示すディスク情報などがサーボ層に記録される。
他方、情報記録層にはトラックが形成されない。従って、情報記録層に対するユーザデータなどの記録再生はサーボ層に形成されたトラックに基づいて行われる。尚、情報記録層の内周及び外周には、プリフォーマット領域が形成される。内周プリフォーマット領域及び外周プリフォーマット領域には、記録波形最適化のための学習パターン、ディスクを管理するための管理情報などが記録される。
サーボ層には、例えば図16に示されるディスク情報がウォブル変調または記録マークを用いて記録される。具体的には、ディスク情報は、ディスクフォーマットの種類を示す情報、ディスクサイズ(例えば、光記録媒体の直径などの物理的なサイズ)を示す情報、最大転送速度を示す情報を含むことができる。ディスク情報は、サーボ層の層数を示す情報、情報記録層の層数を示す情報、情報記録層に適用可能なフォーマットの種類(例えば、一回記録、パケット記録など)を示す情報を含むことができる。ディスク情報は、記録密度(例えば、記録マーク列のトラックピッチ、線方向のマークピッチなど)を示す情報を含むことができる。ディスク情報は、光記録媒体内でアドレスが割り当てられた領域のうちユーザデータが記録される領域の配置と、ユーザデータ以外の情報(例えば、記録波形最適化のための学習パターン)が記録される管理情報記録領域の配置を示す情報領域配置情報を含むことができる。ディスク情報は、光記録媒体の再生に適した(例えば、最適な)ボルテラフィルタ130の次数と各次数のフィルタ演算に必要とされるタップ数を示す情報と、ARMLフィルタ150において必要な雑音相関長を示す情報とを含むことができる。ディスク情報は、適応制御フィルタの制御帯域を示す情報(例えば、ボルテラフィルタ130のステップサイズパラメータ、ARMLフィルタ150に与えられる雑音パラメータを算出する帯域(或いは、雑音パラメータの更新タイミングの周期)など)を含むことができる。ディスク情報は、光記録媒体が許容する再生パワーを示す情報と、光記録媒体に適した(例えば、最適な)記録パワーを示す情報と、記録パルスの形状(例えば、幅、間隔など)を示す記録パルス情報とを含むことができる。更に、ディスク情報のために、光記録媒体には予備領域が設けられてもよい。
前述のように、サーボ層にはスパイラル状のトラックが形成される。このトラックは、図14に示されるように、ランドと呼ばれる面にグルーブを彫ることによって形成される。グルーブは、光記録媒体の1周毎にグルーブピッチの半分だけ内周方向または外周方向にずれるように形成される。従って、トラックは、光記録媒体の1周毎にグルーブ及びランドが交互に切り替わるシングルスパイラル構造を備える。
前述のように、グルーブは、アドレス情報などを含むアドレス管理データに基づいてウォブル変調が施されたり、グルーブの幅を変化させる幅変調が施されたりするので、蛇行して形成される。図15には、ウォブル位相変調が例示されている。図15の位相変調によれば、1ビットの情報がサイン波状の4波のウォブルの位相によって表現される。図15の位相変調は、スキャン方向に向かって最初に内周側に蛇行が進む位相を「0」に割り当て、スキャン方向に向かって最初に外側に蛇行が進む位相を「1」に割り当てる。
本実施形態に係る情報記録再生装置によって用いられる記録波形の一例が図18に示されている。具体的には、図18において、記録波形は、1つのマークを記録するために複数のパルスが使用されるマルチパルスと呼ばれる種別の波形である。これら複数のパルスのうち、先頭の1つがファーストパルスと呼ばれ、最後の1つがラストパルスと呼ばれる。また、これら複数のパルスのうちファーストパルス及びラストパルス以外のパルスは、マルチパルスと称される。ラストパルスの後には、バイアスパワー1を出力するための期間(クーリングパルス)が用意されている。
記録波形の形状は、レベルに関して、記録パワー、消去パワー、バイアスパワー1及びバイパスパワー2の4つのレベルを用いて規定される。また、記録波形の形状は、時間に関して、NRZI信号の立ち上がりエッジ及びクロック信号を基準に種々の時間パラメータを用いて規定される。具体的には、係る時間情報には、例えば、ファーストパルスの開始時間F1、ファーストパルスの終了時間F3、ファーストパルスの間隔F2などが含まれる。また、例えば、ファーストパルスの開始時間F1、ラストパルスの終了時間L3などの記録マークの形成に影響を与え易い時間パラメータは、NRZI信号に応じてデータ記録時に動的に変更されてよい。これらの記録波形の形状を決定する種々のパラメータは、記録波形の形状情報として情報記録再生装置のメモリにおいて管理されると共に、物理フォーマット情報及び管理情報として光記録媒体に記録される。
尚、基準クロックは、情報記録再生装置におけるタイミング制御に利用される。Tは、基準クロックの周期を表す。基準クロックは、前述のクロック生成部341によって生成される。NRZI信号は、記録データをNRZI形式に変換することによって得られる。
光記録媒体にデータを記録する場合において、前述のパルス変調回路324は、記録波形の形状情報と信号処理部343から出力されるNRZI信号とに基づいて、記録パルスを生成する。レーザ駆動回路313は、記録パルスに従ってLD302を駆動する。この結果、光記録媒体に照射されるレーザのパワーは、図18に示される記録波形のように変調される。情報記録再生装置は、記録パワーのレベル、各パルスの幅などを介して記録マークの形状を制御する。例えば、記録パワーのレベルが高くなると、記録マークの幅は広くなる。また、ファーストパルスの開始時間を早くすると、記録マークの開始位置が早くなるので結果的に記録マーク長が長くなる。換言すれば、記録パワーのレベル、各パルスの幅などが最適値からずれると記録マークの形状もまた最適形状から変化するので、再生信号において非線形雑音成分が発生する。
第1の実施形態において、実験結果に基づいてシステムマージンが評価された。光記録媒体及び情報記録再生装置の設計において、システムマージンは種々の誤差要素に対する許容値として細分化して割り当てられる。例えば、記録パワーのマージンを25%とすると、情報記録再生装置の記録パワー誤差に対する許容値として12%程度が割り当てられ、光記録媒体の製造誤差に対する許容値として残りの13%程度が割り当てられる。
情報記録再生装置における記録パワーの誤差は主に2種類の要素を備える。一方の要素は記録パワーを一定に維持するための自動パワー調整処理において生じる誤差であり、他方の要素は光記録媒体に最適な記録パワーを決定するための記録パワー最適化処理において生じる誤差である。そこで、これら2つの誤差要素に対する許容値として夫々6%が割り当てられる。光記録媒体の製造誤差もまた主に2種類の要素を備える。一方の要素は光記録媒体間の特性のばらつきであり、他方の要素は同一光記録媒体内の情報記録層間の特性のばらつきである。光記録媒体間の特性のばらつきに対する許容値として8%が割り当てられ、光記録媒体内の各情報記録層の特性のばらつきに対する許容値として5%が割り当てられる。割り当てられた許容誤差に基づいて、情報記録再生装置及び光記録媒体が設計されれば、情報記録再生装置は光記録媒体から安定的にデータを再生できる。
ここで、光記録媒体内の各情報記録層の特性のばらつきについて更に言及される。情報記録層の特性には、情報記録層の記録パワーに対する感度のばらつきだけでなく、情報記録層を通過する光量を決定する透過率のばらつきも含まれる。即ち、情報記録層が多層化されている場合には、所与の情報記録層の感度のばらつきに加えて当該情報記録層よりも手前側(レーザの入射面側)に形成された1以上の情報記録層の透過率のばらつきを考慮する必要がある。
例えば、各情報記録層の感度のばらつきが3%程度であり、各情報記録層の透過率のばらつきが1%程度であると仮定することができる。この仮定の下では、最も手前側に形成された情報記録層の特性のばらつきは3%と見積もられる。2層目以降に形成された情報記録層の特性のばらつきは、当該情報記録層よりも手前側に形成された情報記録層の透過率のばらつきを加算して評価される。即ち、2層目の情報記録層の特性のばらつきは4%と見積もられ、3層目に形成された情報記録層の特性のばらつきは5%と見積もられ、4層目に形成された情報記録層の特性のばらつきは6%と見積もられる。即ち、4層目の情報記録層の特性のばらつきは、前述の許容値(=5%)を超える。
故に、記録パワーのマージンが25%程度である場合に、4層以上の情報記録層を備える光記録媒体に対して安定的にデータを記録再生するためには、例えば情報記録層の膜の特性を改善するなどの措置を講じる必要がある。
しかしながら、前述のように、本実施形態に係る情報記録再生装置によれば記録パワーのマージンが34%まで拡大される。そこで、マージンの拡大分の一部を光記録媒体内の各情報記録層の特性ばらつきに対する許容値として振り分けることにより、当該許容値を例えば10%に拡大することができる。故に、本実施形態に係る情報記録再生装置によれば、情報記録層の膜の特性を改善することなく、情報記録層が4層以上に多層化された光記録媒体に対して安定的にデータを記録再生することができる。即ち、従来の情報記録層を多層化することによって、安定的にデータを記録再生可能な光記録媒体を低コストに製造することが可能となる。
前述のように、サーボ層を備える光記録媒体において、情報記録層はガイド用の溝構造を備えていない。故に、光記録媒体の製造コストを削減することができる。また、上記溝構造による光の回折が生じないので、情報記録層の透過率を向上させることができる。即ち、情報記録層を多層化することによる光記録媒体の反射率の低下を抑制することができる。
他方、サーボ層を備える光記録媒体に関して、前述のように、サーボ層用のレーザと情報記録層用のレーザとが異なる。情報記録層に対するデータを記録再生する場合に、情報記録層用のレーザの集光スポットは、サーボ層のガイドに従って位置決めされる。しかしながら、係る位置決めを行ったとしても、情報記録層用のレーザ及びサーボ層用のレーザの集光スポットの半径方向の位置は完全には一致せず、光記録媒体または対物レンズのチルトなどによって両者の間には位置ずれが生じる。故に、サーボ層を備える光記録媒体は、通常の(即ち、情報記録層がガイド用の溝構造を備える)光記録媒体に比べて、情報記録層用のレーザの集光スポットの半径方向の位置決め精度において劣る。従って、サーボ層を備える光記録媒体によると、例えばデータの記録を中断した後に再開する追記処理における位置決めの手順が通常の光記録媒体に比べて複雑となる。
一般に、情報記録再生装置は、光記録媒体にデータを記録する際に情報記録層内の例えばプリフォーマット領域において前述の記録パワー最適化処理を行う。具体的には、情報記録再生装置は、情報記録層内の特定の領域に記録パワーを変化させながら学習用のテストパターンを記録し、記録したテストパターンを再生することによって、当該情報記録層に対する最適なパワーを決定する。通常の光記録媒体によれば、この記録パワー最適化処理における誤差を6%程度に抑えることができる。他方、サーボ層を備える光記録媒体によると、前述の位置決め精度の劣化、位置決めの手順の複雑化などが影響するので、記録パワー最適化処理によって生じる誤差を6%程度に抑えることが困難である。そこで、本実施形態に係る情報記録再生装置は、前述のマージンの拡大分の一部を記録パワー最適化処理によって生じる誤差に対する許容値として振り分けることにより当該許容値を例えば9%に拡大し、サーボ層を備える光記録媒体に対してデータを安定的に記録再生できる。
本実施形態に係る情報記録再生装置は、例えば図19Aに示される仕様を満足する光記録媒体を読み取ることができる。図19Aの仕様によれば、情報記録層タイプは追記型であり、サーボ層の層数は2であり、各サーボ層に形成されるガイド構造はランドグルーブであり、情報記録層の層数は5以上であり、チャネルビット長は56.28[nm]である。また、トラックピッチは0.32[μm]であり、各情報記録層におけるデータの記録容量は32.0GBであり、各情報記録層の反射率は1%程度であり、データは17変調方式によって変調された状態で記録される。
他方、本実施形態に係る情報記録再生装置は、例えば図19Bに示される仕様を満足する。図19Bの仕様によれば、サーボ層用の対物レンズのNAは0.6であり、サーボ層用のレーザの波長は660[nm]であり、サーボ層用の再生パワーは2.0[mW]である。また、情報記録層用の対物レンズのNAは0.85であり、情報記録層用のレーザの波長は405[nm]であり、情報記録層用の再生パワーは1.2[mW]である。信号処理において採用されるPRクラスは12221であり、チャネルビットレートは132Mbpsである。ボルテラフィルタ130の次数は3であり、線形フィルタ演算のタップ数は13であり、2次フィルタ演算のタップ数は13×13であり、3次フィルタ演算のタップ数は7×7×7である。ARMLフィルタ150において相関雑音長(=L)は2ビットに設定される。
本実施形態に係る情報記録再生装置は、サーボ層を備える光記録媒体に対して例えば図23Aに示されるデータ記録処理を行う。
図23Aのデータ記録処理は、ステップST1-1から開始する。ステップST1-1において、情報記録再生装置は、サーボ層用のレーザ(例えば、660[nm]の波長を持つ赤色レーザ)を点灯し、当該レーザの集光スポットを光記録媒体における所望のサーボ層にフォーカスする。続いて、情報記録再生装置は、サーボ層用のレーザを用いて所望のサーボ層に形成されたガイドトラックからディスク情報を読み出す(ステップST1-2)。ステップST1-2において読み出されるディスク情報は、例えば図16に示されるものである。情報記録再生装置は、ディスク情報を参照することによって、光記録媒体における情報記録層の層数、情報記録層に適用可能なフォーマットの種類などを確認できる。
図23Aのデータ記録処理は、ステップST1-1から開始する。ステップST1-1において、情報記録再生装置は、サーボ層用のレーザ(例えば、660[nm]の波長を持つ赤色レーザ)を点灯し、当該レーザの集光スポットを光記録媒体における所望のサーボ層にフォーカスする。続いて、情報記録再生装置は、サーボ層用のレーザを用いて所望のサーボ層に形成されたガイドトラックからディスク情報を読み出す(ステップST1-2)。ステップST1-2において読み出されるディスク情報は、例えば図16に示されるものである。情報記録再生装置は、ディスク情報を参照することによって、光記録媒体における情報記録層の層数、情報記録層に適用可能なフォーマットの種類などを確認できる。
情報記録再生装置は、ステップST1-2において読み出されたディスク情報に基づいて、情報記録層に対する処理を開始する。具体的には、情報記録再生装置は、情報記録層用のレーザ(例えば、405[nm]の波長を持つ青色レーザ)を点灯し、当該レーザの集光スポットを光記録媒体における所望の情報記録層にフォーカスする(ステップST1-3)。続いて、情報記録再生装置は、サーボ層に形成されたガイドトラックに基づいて、サーボ層用及び情報記録層用のレーザの集光スポットを情報記録層への記録条件を最適化するための記録学習領域として設定された半径位置へと移動させる(ステップST1-4)。情報記録再生装置は、記録学習領域において記録学習を行い、記録パワー、パルス幅などを最適化する(ステップST1-5)。ステップST1-5が完了すると、処理はステップST1-6へと進む。
ステップST1-6において、情報記録再生装置は、サーボ層に形成されたガイドトラックに基づいて、サーボ層用及び情報記録層用のレーザの集光スポットを情報記録層における所望の半径位置へと移動させる。情報記録再生装置は、ステップST1-5において最適化された記録パワー、パルス幅などに基づいてユーザデータを記録する(ステップST1-7)。対象のユーザデータが全て記録されるまでステップST1-7が繰り返され(ステップST1-8)、データ記録処理は完了する。
本実施形態に係る情報記録再生装置は、サーボ層を備える光記録媒体に対して例えば図23Bに示されるデータ再生処理を行う。
図23Bのデータ再生処理は、ステップST2-1から開始する。ステップST2-1において、情報記録再生装置は、サーボ層用のレーザ(例えば、660[nm]の波長を持つ赤色レーザ)を点灯し、当該レーザの集光スポットを光記録媒体における所望のサーボ層にフォーカスする。続いて、情報記録再生装置は、サーボ層用のレーザを用いて所望のサーボ層に形成されたガイドトラックからディスク情報を読み出す(ステップST2-2)。ステップST2-2において読み出されるディスク情報は、例えば図16に示されるものである。情報記録再生装置は、ディスク情報を参照することによって、光記録媒体における情報記録層の層数、情報記録層に適用可能なフォーマットの種類などを確認できる。また、情報記録再生装置は、光記録媒体の情報記録層からデータを再生するのに適した等化器タップ数(例えば、ボルテラフィルタ130のタップ数)及びARMLフィルタ150の雑音相関長を確認できる。更に、情報記録再生装置は、光記録媒体の情報記録層からデータを再生するのに適した適応制御フィルタの制御帯域情報(例えば、ボルテラフィルタ130のステップサイズパラメータ、ARMLフィルタ150に与えられる雑音パラメータを算出する帯域(或いは、雑音パラメータの更新タイミングの周期)など)を確認できる。
図23Bのデータ再生処理は、ステップST2-1から開始する。ステップST2-1において、情報記録再生装置は、サーボ層用のレーザ(例えば、660[nm]の波長を持つ赤色レーザ)を点灯し、当該レーザの集光スポットを光記録媒体における所望のサーボ層にフォーカスする。続いて、情報記録再生装置は、サーボ層用のレーザを用いて所望のサーボ層に形成されたガイドトラックからディスク情報を読み出す(ステップST2-2)。ステップST2-2において読み出されるディスク情報は、例えば図16に示されるものである。情報記録再生装置は、ディスク情報を参照することによって、光記録媒体における情報記録層の層数、情報記録層に適用可能なフォーマットの種類などを確認できる。また、情報記録再生装置は、光記録媒体の情報記録層からデータを再生するのに適した等化器タップ数(例えば、ボルテラフィルタ130のタップ数)及びARMLフィルタ150の雑音相関長を確認できる。更に、情報記録再生装置は、光記録媒体の情報記録層からデータを再生するのに適した適応制御フィルタの制御帯域情報(例えば、ボルテラフィルタ130のステップサイズパラメータ、ARMLフィルタ150に与えられる雑音パラメータを算出する帯域(或いは、雑音パラメータの更新タイミングの周期)など)を確認できる。
情報記録再生装置は、ステップST2-2において読み出されたディスク情報に基づいて、種々の信号処理パラメータを設定する(ステップST2-3)。具体的には、情報記録再生装置は、ボルテラフィルタ130のタップ数を設定したり、ARMLフィルタ150の雑音相関長を設定したりする。更に、情報記録再生装置は、オフセット抑圧部、ボルテラフィルタ130及びARMLフィルタ150の制御帯域を設定する。ステップST2-3が完了すると、処理はステップST2-4へと進む。
ステップST2-4において、情報記録再生装置は、情報記録層用のレーザ(例えば、405[nm]の波長を持つ青色レーザ)を点灯し、当該レーザの集光スポットを光記録媒体における所望の情報記録層にフォーカスする。続いて、情報記録再生装置は、サーボ層に形成されたガイドトラックに基づいて、サーボ層用及び情報記録層用のレーザの集光スポットを情報記録層における所望の半径位置へと移動させる(ステップST2-5)。情報記録再生装置は、ユーザデータを読み出す(ステップST2-6)。対象のユーザデータが全て読み出されると、データ再生処理は完了する。尚、図23Bのデータ再生処理によれば、ステップST2-3において種々の信号処理パラメータが適切な値に設定される。故に、サーボ層を備え、かつ、情報記録層が多層化された光記録媒体から、安定的にデータを再生することができる。
以上説明したように、第2の実施形態に係る情報記録再生装置は、サーボ層を備え、かつ、情報記録層が多層化された光記録媒体に対してデータを記録再生する。具体的には、この情報記録再生装置は、第1の実施形態と同一または類似の再生信号処理を行うので、再生信号における非線形雑音成分を効果的に抑制できる。従って、この情報記録再生装置によれば、大きなシステムマージンが確保されるので、上記光記録媒体に対しても安定的にデータを記録再生することができる。
上記各実施形態の処理は、汎用のコンピュータを基本ハードウェアとして用いることで実現可能である。上記各実施形態の処理を実現するプログラムは、コンピュータで読み取り可能な記憶媒体に格納して提供されてもよい。プログラムは、インストール可能な形式のファイルまたは実行可能な形式のファイルとして記憶媒体に記憶される。記憶媒体としては、磁気ディスク、光ディスク(CD-ROM、CD-R、DVD等)、光磁気ディスク(MO等)、半導体メモリなどである。記憶媒体は、プログラムを記憶でき、かつ、コンピュータが読み取り可能であれば、何れであってもよい。また、上記各実施形態の処理を実現するプログラムを、インターネットなどのネットワークに接続されたコンピュータ(サーバ)上に格納し、ネットワーク経由でコンピュータ(クライアント)にダウンロードさせてもよい。
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
100,201・・・バンドパスフィルタ
110,202・・・オフセットキャンセラ
111・・・減算器
112・・・加算器
113・・・遅延器
114,115・・・増幅器
120,203・・・AGC
121,204・・・ITR
122,205・・・PLL
130・・・ボルテラフィルタ
131,132,133・・・フィルタ演算器
140,207・・・タップコントローラ
141,142,143・・・タップ係数算出器
150・・・ARMLフィルタ
160・・・ノイズ推定器
161・・・2値化器
162・・・PRチャネルフィルタ
163・・・減算器
164・・・セレクタ
170,210・・・誤り訂正部
206・・・FIRフィルタ
208・・・MLフィルタ
209・・・参照レベル算出器
300・・・PUH
301,302・・・LD
303・・・光学系
304,305・・・フロントモニタ
306,307・・・収差補正機構
308・・・対物レンズ
309・・・対物レンズ駆動機構
310,311・・・受光素子
312,313・・・レーザ駆動回路
320・・・サーボ処理回路
321,323・・・パワー制御回路
322・・・S/H
324・・・パルス変調回路
325,329・・・フォーカス制御回路
326,330・・・トラッキング制御回路
327,331・・・プリアンプ
328,332・・・アナログデジタル変換器
333,334・・・収差制御回路
335・・・チルト制御回路
340・・・信号処理回路
341・・・クロック生成部
342・・・アドレス処理部
343・・・信号処理部
344,345・・・収差誤差計算部
346,347・・・チルト誤差計算部
110,202・・・オフセットキャンセラ
111・・・減算器
112・・・加算器
113・・・遅延器
114,115・・・増幅器
120,203・・・AGC
121,204・・・ITR
122,205・・・PLL
130・・・ボルテラフィルタ
131,132,133・・・フィルタ演算器
140,207・・・タップコントローラ
141,142,143・・・タップ係数算出器
150・・・ARMLフィルタ
160・・・ノイズ推定器
161・・・2値化器
162・・・PRチャネルフィルタ
163・・・減算器
164・・・セレクタ
170,210・・・誤り訂正部
206・・・FIRフィルタ
208・・・MLフィルタ
209・・・参照レベル算出器
300・・・PUH
301,302・・・LD
303・・・光学系
304,305・・・フロントモニタ
306,307・・・収差補正機構
308・・・対物レンズ
309・・・対物レンズ駆動機構
310,311・・・受光素子
312,313・・・レーザ駆動回路
320・・・サーボ処理回路
321,323・・・パワー制御回路
322・・・S/H
324・・・パルス変調回路
325,329・・・フォーカス制御回路
326,330・・・トラッキング制御回路
327,331・・・プリアンプ
328,332・・・アナログデジタル変換器
333,334・・・収差制御回路
335・・・チルト制御回路
340・・・信号処理回路
341・・・クロック生成部
342・・・アドレス処理部
343・・・信号処理部
344,345・・・収差誤差計算部
346,347・・・チルト誤差計算部
Claims (8)
- 光記録媒体から読み出された再生信号に残留するオフセット成分を抑圧し、第1の信号を得る第1の信号処理部と、
前記第1の信号に残留する非線形歪成分を抑圧し、第2の信号を得る第2の信号処理部と、
前記第2の信号に残留する相関雑音成分を抑圧し、第3の信号を得る第3の信号処理部と
を具備する、信号処理装置。 - 前記第2の信号処理部は、ボルテラフィルタを備え、
前記第3の信号処理部は、ARMLフィルタを備える、
請求項1の信号処理装置。 - 前記第1の信号処理部、前記第2の信号処理部及び前記第3の信号処理部は、適応フィルタであり、
前記第1の信号処理部の制御帯域は、前記第2の信号処理部の制御帯域よりも高く、
前記第2の信号処理部の制御帯域は、前記第3の信号処理部の制御帯域よりも高い、
請求項1の信号処理装置。 - 光記録媒体から読み出された再生信号に残留するオフセット成分を抑圧し、第1の信号を得る第1の信号処理部と、
前記第1の信号に残留する非線形歪成分を抑圧し、第2の信号を得る第2の信号処理部と、
前記第2の信号に残留する相関雑音成分を抑圧し、第3の信号を得る第3の信号処理部と
を具備する、情報再生装置。 - 前記第2の信号処理部は、ボルテラフィルタを備え、
前記第3の信号処理部は、ARMLフィルタを備える、
請求項4の情報再生装置。 - 前記第1の信号処理部、前記第2の信号処理部及び前記第3の信号処理部は、適応フィルタであり、
前記第1の信号処理部の制御帯域は、前記第2の信号処理部の制御帯域よりも高く、
前記第2の信号処理部の制御帯域は、前記第3の信号処理部の制御帯域よりも高い、
請求項4の情報再生装置。 - 前記光記録媒体は、5以上の情報記録層を備える、請求項4の情報再生装置。
- 前記光記録媒体は、情報記録層と、ガイド構造が形成されたサーボ層とを備え、
前記情報記録層に記録されたユーザデータは、前記ガイド構造に基づいて第1のレーザを用いて再生され、
前記サーボ層に記録されたディスクデータは、前記第1のレーザと波長の異なる第2のレーザを用いて再生される、
請求項4の情報再生装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014504598A JP5714177B2 (ja) | 2012-03-16 | 2012-03-16 | 信号処理装置及び情報再生装置 |
| PCT/JP2012/056918 WO2013136519A1 (ja) | 2012-03-16 | 2012-03-16 | 信号処理装置及び情報再生装置 |
| US14/487,689 US9117485B2 (en) | 2012-03-16 | 2014-09-16 | Signal processing apparatus capable of suppressing non-linear noise component during reading optical recording medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2012/056918 WO2013136519A1 (ja) | 2012-03-16 | 2012-03-16 | 信号処理装置及び情報再生装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US14/487,689 Continuation US9117485B2 (en) | 2012-03-16 | 2014-09-16 | Signal processing apparatus capable of suppressing non-linear noise component during reading optical recording medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2013136519A1 true WO2013136519A1 (ja) | 2013-09-19 |
Family
ID=49160484
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2012/056918 WO2013136519A1 (ja) | 2012-03-16 | 2012-03-16 | 信号処理装置及び情報再生装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9117485B2 (ja) |
| JP (1) | JP5714177B2 (ja) |
| WO (1) | WO2013136519A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107000199B (zh) * | 2014-12-26 | 2020-04-17 | 川崎重工业株式会社 | 自行式关节机械手 |
| US10887022B2 (en) | 2017-06-15 | 2021-01-05 | Nokia Of America Corporation | Backward propagation with compensation of some nonlinear effects of polarization mode dispersion |
| CN113067786B (zh) * | 2020-01-02 | 2023-08-29 | 上海诺基亚贝尔股份有限公司 | 用于均衡信号的设备、方法、装置及计算机可读介质 |
| JP2022045663A (ja) * | 2020-09-09 | 2022-03-22 | 株式会社東芝 | 磁気ディスク装置及びリード処理方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002367291A (ja) * | 2001-06-11 | 2002-12-20 | Fujitsu Ltd | 情報記録再生装置及び方法並びに信号復号回路 |
| JP2006313592A (ja) * | 2005-05-09 | 2006-11-16 | Sony Corp | 信号処理装置および方法、プログラム記録媒体、並びにプログラム |
| JP2011192377A (ja) * | 2010-02-22 | 2011-09-29 | Tdk Corp | 光記録媒体、光記録再生方法 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4027444B2 (ja) * | 1996-03-11 | 2007-12-26 | 富士通株式会社 | 信号再生方法及び信号再生装置 |
| US6185175B1 (en) * | 1998-12-02 | 2001-02-06 | Cirrus Logic, Inc. | Sampled amplitude read channel employing noise whitening in a remod/demod sequence detector |
| JP2002117585A (ja) | 2000-06-09 | 2002-04-19 | Tdk Corp | 光情報媒体 |
| US7215787B2 (en) * | 2002-04-17 | 2007-05-08 | Dirac Research Ab | Digital audio precompensation |
| JP4142537B2 (ja) * | 2003-09-19 | 2008-09-03 | 松下電器産業株式会社 | 光ディスク装置 |
| JP4276516B2 (ja) | 2003-10-20 | 2009-06-10 | パイオニア株式会社 | 多層光記録媒体および光ピックアップ装置 |
| WO2007010994A1 (ja) * | 2005-07-20 | 2007-01-25 | Matsushita Electric Industrial Co., Ltd. | デジタル信号再生装置 |
| EP1835501A3 (en) * | 2006-03-14 | 2014-07-02 | Ricoh Company, Ltd. | Data reproduction method, data reproduction apparatus, optical disk, and data recording/reproduction apparatus |
| JP4720768B2 (ja) | 2007-03-28 | 2011-07-13 | 株式会社日立製作所 | ディスク状媒体及びディスク装置 |
| EP2639795A1 (en) | 2010-11-09 | 2013-09-18 | Kabushiki Kaisha Toshiba | Information recording medium, information reproducing device, and information recording device |
| US8767869B2 (en) * | 2011-08-18 | 2014-07-01 | Qualcomm Incorporated | Joint linear and non-linear cancellation of transmit self-jamming interference |
-
2012
- 2012-03-16 WO PCT/JP2012/056918 patent/WO2013136519A1/ja active Application Filing
- 2012-03-16 JP JP2014504598A patent/JP5714177B2/ja active Active
-
2014
- 2014-09-16 US US14/487,689 patent/US9117485B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002367291A (ja) * | 2001-06-11 | 2002-12-20 | Fujitsu Ltd | 情報記録再生装置及び方法並びに信号復号回路 |
| JP2006313592A (ja) * | 2005-05-09 | 2006-11-16 | Sony Corp | 信号処理装置および方法、プログラム記録媒体、並びにプログラム |
| JP2011192377A (ja) * | 2010-02-22 | 2011-09-29 | Tdk Corp | 光記録媒体、光記録再生方法 |
Non-Patent Citations (2)
| Title |
|---|
| SEIICHI MITA ET AL.: "Jiki Disk no Shingo Shori Gijutsu -PRML Hoshiki no Kiso to Jissai-", MORIKITA PUBLISHING CO. LTD., 7 September 2010 (2010-09-07), pages 99 - 102 * |
| TOSHIYUKI NAKAGAWA ET AL.: "Adaptive Third-Order Volterra Filter for High-Density Read-Only Blu-ray Disc", JAPANESE JOURNAL OF APPLIED PHYSICS, vol. 45, no. 2B, 24 February 2006 (2006-02-24), pages 1084 - 1087 * |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5714177B2 (ja) | 2015-05-07 |
| US20150003225A1 (en) | 2015-01-01 |
| US9117485B2 (en) | 2015-08-25 |
| JPWO2013136519A1 (ja) | 2015-08-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5042236B2 (ja) | 情報記録媒体評価方法、情報記録媒体、情報記録媒体の製造方法、信号処理方法、アクセス制御装置 | |
| KR100869299B1 (ko) | 데이터 재생 방법, 데이터 재생 장치, 광 디스크, 및데이터 기록/재생 장치 | |
| EP3267440B1 (en) | Data detection device, reproduction device, and data detection method | |
| JP2011103153A (ja) | 情報検出装置及び光ディスク装置 | |
| JP5057925B2 (ja) | デジタル情報再生方法 | |
| JP5714177B2 (ja) | 信号処理装置及び情報再生装置 | |
| US8873358B2 (en) | Skew detection method and optical disc device | |
| US20040257954A1 (en) | Reproduced signal equalizing method for optical information media and optical information reproducing/recording apparatus | |
| JP2010262702A (ja) | 記録条件の調整方法及び光ディスク装置 | |
| JP5766281B2 (ja) | 信号処理装置、信号処理方法、及び光ディスク装置 | |
| JP2004326839A (ja) | 情報再生方法及びそれを用いた情報再生装置 | |
| US11749307B2 (en) | Signal processing device, signal processing method, and program | |
| JP7236392B2 (ja) | 復号装置、復号方法 | |
| JP6123821B2 (ja) | 光媒体再生装置及び光媒体再生方法 | |
| CA2707185A1 (en) | Reproduced signal evaluating method, information recording medium, reproducing device, and recording device | |
| JP2017162537A (ja) | 光ディスク装置 | |
| US8179760B2 (en) | Reproduction signal evaluation method, information recording medium, reproduction apparatus and recording apparatus | |
| JP5623097B2 (ja) | 情報再生方法及び装置、並びに光ディスク装置 | |
| JP4234042B2 (ja) | 多値情報記録媒体,多値情報波形等化装置,多値情報再生装置 | |
| JP2015057753A (ja) | データ検出装置、再生装置、データ検出方法 | |
| JP2008300023A (ja) | 情報再生装置及び方法 | |
| US20090141605A1 (en) | Optical disc reproducing device and optical disc reproducing method | |
| US20090010116A1 (en) | Information recording apparatus, information processing method, and computer program | |
| JP2008287839A (ja) | デジタルデータ再生装置 | |
| JP2019160370A (ja) | 情報記録再生装置及び情報記録再生方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 12871062 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2014504598 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 12871062 Country of ref document: EP Kind code of ref document: A1 |