WO2013128846A1 - 光音響画像生成装置及び方法 - Google Patents
光音響画像生成装置及び方法 Download PDFInfo
- Publication number
- WO2013128846A1 WO2013128846A1 PCT/JP2013/000929 JP2013000929W WO2013128846A1 WO 2013128846 A1 WO2013128846 A1 WO 2013128846A1 JP 2013000929 W JP2013000929 W JP 2013000929W WO 2013128846 A1 WO2013128846 A1 WO 2013128846A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- spatial frequency
- image data
- cross
- photoacoustic
- light
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images












Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0093—Detecting, measuring or recording by applying one single type of energy and measuring its conversion into another type of energy
- A61B5/0095—Detecting, measuring or recording by applying one single type of energy and measuring its conversion into another type of energy by applying light and detecting acoustic waves, i.e. photoacoustic measurements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7235—Details of waveform analysis
- A61B5/7253—Details of waveform analysis characterised by using transforms
- A61B5/7257—Details of waveform analysis characterised by using transforms using Fourier transforms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/74—Details of notification to user or communication with user or patient; User input means
- A61B5/742—Details of notification to user or communication with user or patient; User input means using visual displays
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Clinical applications
- A61B8/0891—Clinical applications for diagnosis of blood vessels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5207—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of raw data to produce diagnostic data, e.g. for generating an image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H50/00—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics
- G16H50/20—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics for computer-aided diagnosis, e.g. based on medical expert systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2576/00—Medical imaging apparatus involving image processing or analysis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/54—Control of the diagnostic device
Definitions
- the present invention relates to a photoacoustic image generating apparatus and method, and more particularly, to photoacoustic image generation by irradiating a subject with light and detecting an acoustic wave generated in the subject by light irradiation to generate a photoacoustic image.
- Apparatus and method are particularly, to photoacoustic image generation by irradiating a subject with light and detecting an acoustic wave generated in the subject by light irradiation to generate a photoacoustic image.
- Ultrasonography is known as a type of imaging that can noninvasively inspect the internal condition of a living body.
- an ultrasonic probe capable of transmitting and receiving ultrasonic waves is used.
- the ultrasonic waves travel inside the living body and are reflected at the tissue interface.
- the internal appearance can be imaged by calculating the distance based on the time it takes for the ultrasound probe to receive the reflected sound and the reflected ultrasound to return to the ultrasound probe.
- photoacoustic imaging which image-forms the inside of a biological body using a photoacoustic effect is known.
- pulsed laser light is applied to the inside of a living body.
- living tissue absorbs the energy of the pulsed laser light, and adiabatic expansion by the energy generates an ultrasonic wave (photoacoustic signal).
- photoacoustic signal is detected by an ultrasonic probe or the like, and a photoacoustic image is constructed based on the detection signal, whereby visualization in the living body based on the photoacoustic signal is possible.
- Patent Document 1 describes that spatial frequency processing is performed for photoacoustic imaging.
- the irradiation light from a light source is irradiated to a test object, and a photoacoustic signal is detected by several detector elements.
- the detected photoacoustic signal includes the photoacoustic signal generated on the surface of the subject and the photoacoustic signal generated inside the subject.
- the detection signals of a plurality of detector elements at the same reception time are Fourier-transformed in the space direction to acquire a space frequency signal.
- the spatial frequency signal In the spatial frequency signal, components below the predetermined frequency are reduced, the inverse Fourier transform is performed on the spatial frequency signal whose low frequency component is reduced, and a photoacoustic image is generated based on the signal obtained by the inverse transform. Do. Since the photoacoustic signal generated on the surface of the subject is simultaneously obtained by a plurality of detector elements, imaging in which the influence of the photoacoustic wave generated on the surface of the subject is reduced is possible.
- Patent Document 2 discloses that in ultrasonic imaging, image data is subjected to Fourier transform to generate image data in a spatial frequency domain, and predetermined low-frequency components of image data in the Fourier transform spatial frequency domain are generated. It is described that image data in the spatial frequency domain, which has been removed and low-pass components removed, is inversely transformed to generate image data in the actual data area.
- the low-pass component corresponds to shading and the image part necessary for diagnosis does not exist in the low-pass, removing the component with low spatial frequency removes the shading. It is stated that it corresponds to That is, in Patent Document 2, a desired region to be viewed in image data exists in the high region in the spatial frequency region, so low frequency removal is performed in the spatial frequency region so as to remove regions other than the necessary region. There is.
- a blood vessel etc. can be considered as a part imaged by photoacoustic, for example.
- blood vessels of various sizes from thick to thin and it is considered to be useful for diagnostic imaging if blood vessels of a desired size can be imaged therefrom.
- a signal of the same time is Fourier-transformed in the spatial direction with respect to the detection signal of the photoacoustic wave itself, and therefore, a blood vessel of a desired size can not be extracted and imaged.
- Patent Document 2 since the target is an ultrasound image and the region to be viewed is simply present in the high region of the spatial frequency region, only by performing the spatial frequency processing for removing the low frequency component The desired structure can not be extracted and imaged.
- a light source for emitting light to be irradiated to a subject
- an acoustic wave detection means for detecting a photoacoustic wave generated in the subject by light irradiation to the subject
- light Photoacoustic image generation means which reconstructs a photoacoustic signal which is a detection signal of an acoustic wave and generates image data, Fourier transform which Fourier transforms image data in a two or more dimensional space, and generates image data of a spatial frequency domain Means
- spatial frequency processing means for extracting a predetermined spatial frequency component from image data in the spatial frequency domain
- Fourier inverse transformation means for performing inverse Fourier transform on the extracted spatial frequency component to generate image data after spatial frequency processing
- a photoacoustic image generating apparatus characterized by comprising:
- the spatial frequency processing means may extract spatial frequency components higher than the first spatial frequency and lower than the second frequency region higher than the first spatial frequency.
- the first spatial frequency and the second spatial frequency may be changed according to the position in the spatial frequency domain (wave number space).
- the spatial frequency processing means may be configured to determine the predetermined spatial frequency component to be extracted according to the observation target condition designated by the user.
- the image processing apparatus may further include a cross-sectional image generation unit that generates cross-sectional image data in which image data in a predetermined range in the direction along the axis is integrated, and the Fourier transform unit may perform two-dimensional Fourier transform on the cross-sectional image data.
- the cross-sectional image generation unit cuts out cross sections at a plurality of positions along one axis to generate a plurality of cross-sectional image data
- a Fourier transform unit Fourier-transforms each of the plurality of generated cross-sectional image data
- Image data in the spatial frequency domain is generated
- the spatial frequency processing means extracts a predetermined spatial frequency component from each of the plurality of generated image data in the spatial frequency domain
- the inverse Fourier transform means The predetermined spatial frequency components extracted from each of the image data of the area may be subjected to Fourier inverse transform to generate cross-sectional image data after spatial frequency processing for each of the plurality of cross-sectional image data.
- the cross-sectional image generation unit may cut out cross sections at equal intervals.
- the cross-sectional image generation means may cut out the cross section in a direction parallel to the acoustic wave detection surface of the super acoustic wave detection means along an axis corresponding to the depth direction in the object.
- the cross-sectional image generation unit may integrate the image data within the predetermined range by projecting the maximum value of the image data within the predetermined range or integrating the image data within the predetermined range.
- the image display control means is further configured to cause the display device to display cross-sectional image data after spatial frequency processing obtained by performing inverse Fourier transform on predetermined spatial frequency components extracted from cross-sectional image data in the spatial frequency domain. Good.
- the image processing apparatus further comprises cross section position selection means for determining the cross section position of the displayed cross section image data according to the user operation, and the display control means displays the cross section image data subjected to spatial frequency processing corresponding to the cross section position designated by the user. It may be displayed on the device.
- the display control means may display a slide bar for specifying the cross-sectional position on the display device, and the cross-sectional position selection means may determine the cross-sectional position in accordance with the user's operation of the slide bar.
- the display control means may display the cross-sectional image data before the spatial frequency processing and the cross-sectional image data after the spatial frequency processing on the display device side by side.
- the display control means may binarize the cross-sectional image data after spatial frequency processing and display it on the display device.
- the Fourier transform means may three-dimensionally Fourier transform three-dimensional image data based on the three-dimensionally detected photoacoustic wave.
- the light source emits light of a plurality of different wavelengths
- the acoustic wave detection means detects a plurality of photoacoustic waves generated in the subject after each of the plurality of wavelengths of light is irradiated, and the photoacoustic image is generated.
- Generation means respectively reconstructs photoacoustic signals detected corresponding to light of a plurality of wavelengths and image data, and Fourier transform means Fourier-transforms each of image data corresponding to light of a plurality of wavelengths
- the spatial frequency processing means extracts predetermined spatial frequency components corresponding to each wavelength from the image data of the spatial frequency domain corresponding to the light of a plurality of wavelengths which has been subjected to Fourier transform, and the inverse Fourier transform means extracts Each of the processed spatial frequency components may be inverse Fourier transformed.
- a spatial frequency component that the light of a plurality of wavelengths includes the light of the first wavelength and the light of the second wavelength
- the spatial frequency processing means extracts from the image data of the spatial frequency domain corresponding to the light of the first wavelength
- the spatial frequency extracted from the image data of the spatial frequency domain corresponding to the light of the second wavelength may be different from each other.
- composition further provided with the deconvoluting means which deconvolutes the differential waveform of the light irradiated to a subject from a photoacoustic signal.
- the present invention also includes the steps of: irradiating a subject with light from a light source; detecting a photoacoustic wave generated in the subject by light irradiation of the subject; and photoacoustic that is a detection signal of the photoacoustic wave Reconstructing the signal to generate image data, Fourier transforming the image data in a two or more dimensional space, and generating image data in the spatial frequency domain, and predetermined spatial frequency from the image data in the spatial frequency domain
- a photoacoustic image generation method comprising the steps of: extracting components; and performing inverse Fourier transform on the extracted processing spatial frequency components to generate spatial frequency processed image data.
- the photoacoustic image generating apparatus and method according to the present invention Fourier-transforms image data obtained by reconstructing a photoacoustic signal into image data in a spatial frequency domain, and extracts a predetermined spatial frequency component from the image data.
- the extracted spatial frequency component is subjected to inverse Fourier transform to generate image data after spatial frequency processing.
- a desired structure can be selectively imaged by appropriately selecting the spatial frequency component to be extracted according to the size of the observation target and the like.
- FIG. 7 is a view showing cross-sectional image data obtained by performing inverse Fourier transform.
- FIG. 6 shows an elliptical spatial frequency filter.
- FIG. 6 shows a spatial frequency filter that removes low frequency regions.
- FIG. 1 shows a photoacoustic image generation apparatus according to a first embodiment of the present invention.
- the photoacoustic image generation apparatus (photoacoustic image diagnostic apparatus) 10 includes an ultrasound probe (probe) 11, an ultrasound unit 12, and a light source (laser unit) 13.
- the laser unit 13 is a light source and generates light (laser light) to be irradiated to the subject.
- the wavelength of the laser light may be appropriately set according to the object to be observed.
- the laser unit 13 emits, for example, light of a wavelength at which absorption of hemoglobin is large, specifically, a wavelength of 750 nm or 800 nm.
- the laser beam emitted from the laser unit 13 is guided to the probe 11 using a light guiding means such as an optical fiber, for example, and is irradiated onto the subject from the probe 11. Alternatively, light irradiation may be performed from a place other than the probe 11.
- the probe 11 has an acoustic wave detection means for detecting an acoustic wave (ultrasound) from within the subject.
- the probe 11 has, for example, a plurality of ultrasonic transducers arranged in a one-dimensional manner.
- the probe 11 detects a photoacoustic wave (hereinafter also referred to as a photoacoustic signal) generated by the measurement object in the subject absorbing the light from the laser unit 13 with a plurality of ultrasonic transducers.
- the ultrasound unit 12 includes a reception circuit 21, an AD conversion unit 22, a reception memory 23, a photoacoustic image reconstruction unit 24, a detection / logarithmic conversion unit 25, an image construction unit 26, a cross-sectional image generation unit 27, a Fourier transform unit 28,
- the spatial frequency processing means 29, the inverse Fourier transform means 30, the display control means 31, the trigger control circuit 32, and the control means 33 are included.
- the control means 33 controls each part in the ultrasonic unit 12.
- the receiving circuit 21 receives a detection signal (photoacoustic signal) of the photoacoustic wave detected by the probe 11.
- the AD conversion means 22 samples the photoacoustic signal received by the receiving circuit 21 and converts it into a digital signal.
- the AD conversion unit 22 samples the photoacoustic signal at a predetermined sampling period in synchronization with, for example, an AD clock signal.
- the trigger control circuit 32 outputs a light trigger signal for instructing the laser unit 13 to emit light.
- the laser unit 13 includes a flash lamp 41 for exciting a laser medium (not shown) such as YAG or titanium-sapphire, and a Q switch 42 for controlling laser oscillation.
- a flash lamp trigger signal When the trigger control circuit 32 outputs a flash lamp trigger signal, the laser unit 13 lights the flash lamp 41 to excite the laser medium.
- the trigger control circuit 32 outputs a Q switch trigger signal, for example, when the flash lamp 41 sufficiently excites the laser medium.
- the Q switch 42 is turned on when the Q switch trigger signal is received, and causes the laser unit 13 to emit laser light.
- the time required from the lighting of the flash lamp 41 to the sufficient excitation state of the laser medium can be estimated from the characteristics of the laser medium and the like.
- the Q switch 42 may be turned on after the laser medium is sufficiently excited in the laser unit 13. In that case, a signal indicating that the Q switch 42 has been turned on may be notified to the ultrasonic unit 12 side.
- the light trigger signal is a concept including at least one of a flash lamp trigger signal and a Q switch trigger signal.
- the Q switch trigger signal corresponds to the light trigger signal, and when the timing of the Q switch trigger is generated by the laser unit 13, the flash lamp trigger signal is the light trigger signal. It may correspond.
- the light trigger signal By outputting the light trigger signal, the irradiation of the laser light to the subject and the detection of the photoacoustic signal are performed.
- the trigger control circuit 32 outputs a sampling trigger signal instructing the start of sampling to the AD conversion means 22.
- the trigger control circuit 32 outputs a sampling trigger signal at a predetermined timing after outputting the light trigger signal. After outputting the light trigger signal, the trigger control circuit 32 preferably outputs a sampling trigger signal at timing when the object is actually irradiated with laser light. For example, the trigger control circuit 32 outputs a sampling trigger signal in synchronization with the output of the Q switch trigger signal.
- the AD conversion means 22 starts sampling of the photoacoustic signal detected by the probe 11.
- the AD conversion unit 22 stores the sampled photoacoustic signal in the reception memory 23.
- a semiconductor memory device can be used as the reception memory 23.
- another storage device such as a magnetic storage device may be used as the reception memory 23.
- the reception memory 23 stores sampling data (photoacoustic data) of the photoacoustic signal.
- the photoacoustic image reconstruction means 24 reads the photoacoustic signal from the reception memory 23 and reconstructs the read photoacoustic signal.
- the photoacoustic image reconstruction means 24 generates image data of each line of the photoacoustic image which is a tomographic image based on the photoacoustic signal.
- the reconstructed photoacoustic signal can be regarded as a photoacoustic image.
- the photoacoustic image reconstruction means 24 reconstructs the photoacoustic signal by the delay addition method (equivalent to Delay and Sum, phase matching addition, and phasing addition).
- the photoacoustic image reconstruction means 24 adds, for example, 64 photoacoustic signals at a delay time according to the position of each element (each ultrasonic transducer) to generate data for one line. At that time, it may be assumed that the sound velocity in the object is constant, or the delay time of each element may be corrected in consideration of the sound velocity distribution. Instead of the delay addition direction, reconstruction may be performed using the Hough transform method or the Fourier transform method.
- the detection / logarithmic conversion means 25 generates an envelope of the data of each line output by the photoacoustic image reconstruction means 24, and logarithmically converts the envelope to widen the dynamic range.
- the image construction means 26 generates a photoacoustic image based on the data of each line subjected to logarithmic conversion.
- the image construction means 26 converts, for example, the position in the time axis direction of the photoacoustic signal (peak portion) into the position in the depth direction in the tomographic image to generate a photoacoustic image.
- the photoacoustic image reconstruction means 24, the detection / logarithmic conversion means 25, and the image construction means 26 correspond to photoacoustic image generation means.
- the photoacoustic image generation means generates three-dimensional image data based on, for example, three-dimensionally detected photoacoustic waves.
- the cross-sectional image generation unit 27 cuts out a cross section of a predetermined plane from the photoacoustic three-dimensional image data.
- the cross-sectional image generation unit 27 cuts out the image data along, for example, a plane perpendicular to one of the axes constituting the three-dimensional space.
- the cross-sectional image generation unit 27 generates cross-sectional image data in which image data of a predetermined range in a direction perpendicular to the cross section including the cut cross section is integrated.
- cross-sectional image generation unit 27 when the cross-sectional image generation unit 27 cuts out a cross section along a plane parallel to the acoustic wave detection surface of the probe 11 at a position with an axis corresponding to the depth direction of the subject, Cross-sectional images of a predetermined number of sheets in the deep direction) are integrated into one image.
- the cross-sectional image generation unit 27 integrates the image data within the predetermined range into one image data, for example, by projecting the maximum value of the image data within the predetermined range.
- the image data within the predetermined range may be integrated by integrating (averaging) the image data within the predetermined range.
- the Fourier transform means Fourier transforms the photoacoustic image data to generate spatial frequency domain image data.
- the Fourier transform means 28 two-dimensionally Fourier transforms the cross-sectional image data generated by the cross-sectional image generation means 27.
- the spatial frequency processing means 29 extracts predetermined spatial frequency components from the image data of the spatial frequency domain which has been subjected to Fourier transform.
- the spatial frequency processing means 29 selectively extracts spatial frequency components higher than the first spatial frequency and lower than the second frequency region higher than the first spatial frequency, for example, from image data in the spatial frequency region. .
- the inverse Fourier transform unit 30 performs inverse Fourier transform on the spatial frequency component extracted by the spatial frequency processing unit 29 to generate image data after spatial frequency processing.
- the display control means 31 displays the cross-sectional image data after spatial frequency processing obtained by the inverse Fourier transform means 30 performing inverse transformation on the display screen of the image display means 14 such as a display device.
- the display control means 31 may, for example, binarize the cross-sectional image data after spatial frequency processing represented by gradation data and display the same on the display device.
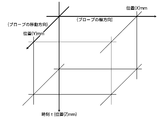
- FIG. 2 shows a detection space for the photoacoustic signal.
- the time direction of the photoacoustic signal corresponds to the depth direction (Z direction) of the photoacoustic image.
- the probe 11 has, for example, a plurality of detector elements (ultrasonic transducers) arranged one-dimensionally in the X direction. By scanning such a probe 11 in the Y direction, a photoacoustic signal can be three-dimensionally acquired. Instead of scanning a probe in which a plurality of detector elements are one-dimensionally arranged, a probe in which a plurality of detector elements are two-dimensionally arranged in the X direction and the Y direction may be used. In this case, the photoacoustic signal can be three-dimensionally acquired without scanning the probe.
- FIG. 3 shows a tomographic image (photoacoustic image) of the XZ cross section.
- the photoacoustic image generation unit when the probe 11 has a plurality of ultrasonic transducers arranged in the X direction, the photoacoustic image generation unit generates a photoacoustic image of the XZ cross section. For example, if the blood vessel traverses in the Y direction, a circular blood vessel cross section appears in the photoacoustic image of the XZ cross section.
- Three-dimensional photoacoustic image data is obtained by scanning the probe 11 in the Y direction, generating a photoacoustic image of an XZ cross section at each scanning position, and connecting a plurality of the cross sectional images.
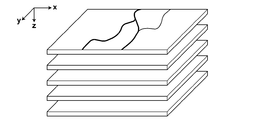
- FIG. 4 shows a cross-sectional image generated by the cross-sectional image generation means 27.
- the cross-sectional image generation unit 27 cuts out a cross section from the three-dimensional photoacoustic image data in a plane (XY plane) parallel to the acoustic wave detection surface of the probe 11 along, for example, the Z axis, To generate cross-sectional image data.
- the cross-sectional image generation unit 27 generates one cross-sectional image data by projecting the maximum value of a plurality of pieces of image data corresponding to a thickness of 2 mm in the depth direction (Z direction), for example.
- the cross-sectional image generation unit 27 cuts out cross sections at a plurality of positions arranged at equal intervals along the Z axis, for example, and generates cross-sectional image data every 2 mm.
- the cross-sectional image generated by the cross-sectional image generation unit 27 is not limited to the cross-sectional image parallel to the XY plane, and the cross-sectional image generation unit 27 may generate a cross-sectional image parallel to the XZ plane or the YZ plane.
- the Fourier transform means 28 performs Fourier transform on each of the plurality of cross-sectional image data shown in FIG. 4 to generate cross-sectional image data of a plurality of spatial frequency regions.
- the spatial frequency processing means 29 extracts predetermined spatial frequency components from each of the generated cross-sectional image data of the plurality of spatial frequency regions.
- the inverse Fourier transform unit 30 inverse Fourier transforms predetermined spatial frequency components extracted from each of the plurality of cross-sectional image data in the spatial frequency domain. By performing inverse transformation, it is possible to generate cross-sectional image data after spatial frequency processing from the plurality of cross-sectional image data shown in FIG.
- the three-dimensional photoacoustic image data after spatial frequency processing can be obtained by connecting cross-sectional image data after plural spatial frequency processing.
- FIG. 5 shows an example of an image of cross-sectional image data.
- the image shown in FIG. 5 corresponds to one of the plurality of cross-sectional image data shown in FIG.
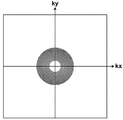
- FIG. 6 shows cross-sectional image data of a spatial frequency domain (wave number space) subjected to Fourier transform.
- the cross-sectional image data shown in FIG. 5 is converted into data in the spatial frequency domain, data shown in FIG. 6 is obtained.
- the horizontal axis represents the wave number kx
- the vertical axis represents the wave number ky.
- the intersection of kx and ky is the origin, and the spatial frequency component is lower the closer to the origin.
- FIG. 7 shows an example of the spatial frequency filter to which the spatial frequency processing means 29 applies.
- the white part represents a part blocked by the spatial frequency filter
- the gray part represents a part transmitted through the spatial frequency filter.
- the spatial frequency processing means 29 applies, for example, a spatial frequency filter as shown in FIG. 7 to the image data in the wave number space shown in FIG. As a result, the spatial frequency processing means 29 removes low frequency components within a certain distance from the origin in the wave number space and high frequency components longer than another constant distance from the origin in the wave number space.
- FIG. 8 shows image data of predetermined spatial frequency components which the spatial frequency processing means 29 extracts.
- the spatial frequency processing means 29 extracts the data in the annular region shown in gray in FIG. 7 in the image data in the spatial frequency region of FIG. 6 as data of a predetermined spatial frequency component. .
- FIG. 9 shows cross-sectional image data obtained by subjecting the image data of the spatial frequency component shown in FIG. 8 to inverse Fourier transform.
- the spatial frequency filter shown in FIG. 7 may be appropriately determined in accordance with the size of the object to be observed.
- the user specifies the thickness of the blood vessel to be extracted as the observation target condition.
- the spatial frequency processing means 29 sets a spatial frequency filter corresponding to the designated thickness of the blood vessel.
- the spatial frequency processing means 29 selectively transmits only the frequency band (ring band) corresponding to 1 to 2 cycles / mm on the image.
- a spatial frequency filter may be set to selectively transmit a predetermined range (for example, ⁇ ⁇ ) from the center at 2 cycles / mm. If the thickness of the blood vessel to be extracted is 1 mm, a spatial frequency filter that selectively transmits frequency components in the range of 0.3 to 0.8 cycles / mm may be used.
- the observation site may be specified.
- the spatial frequency processing means 29 information of the spatial frequency filter corresponding to the observation site is stored in advance.
- the spatial frequency processing means 29 reads out the information of the spatial frequency filter corresponding to the observation site, and sets the spatial frequency filter according to the read out information of the spatial frequency filter.
- FIG. 10 shows an operation procedure of the photoacoustic image generation apparatus 10.
- the trigger control circuit 32 outputs a flash lamp trigger signal to the laser unit 13.
- the flash lamp 41 is turned on in response to the flash lamp trigger signal, and excitation of the laser medium is started.
- the trigger control circuit 32 sends a Q switch trigger signal to the laser unit 13 and turns on the Q switch 42 to emit pulse laser light from the laser unit 13 (step S1).
- the trigger control circuit 32 outputs the Q switch trigger signal, for example, at a timing that is in a predetermined time relationship with the timing at which the flash lamp trigger signal is output.
- the trigger control circuit 32 outputs a Q switch trigger signal 150 s seconds after flash lamp emission.
- the laser beam emitted from the laser unit 13 is irradiated to the subject.
- a photoacoustic signal is generated by the irradiated pulse laser light.
- the probe 11 detects the photoacoustic signal generated in the subject (step S2).
- the photoacoustic signal detected by the probe is input to the AD conversion unit 22 through the reception circuit 21.
- the AD conversion means 22 samples the photoacoustic signal, converts it into digital data, and stores it in the reception memory 23.
- three-dimensional data of a photoacoustic signal can be obtained by scanning a probe 11 in which a plurality of ultrasonic transducers are one-dimensionally arrayed and detecting light irradiation and a photoacoustic signal at a plurality of scanning positions.
- the photoacoustic image reconstruction means 24 reads the photoacoustic signal from the reception memory 23 and reconstructs the read photoacoustic signal.
- the detection / logarithmic conversion means 25 performs detection / logarithmic conversion on the reconstructed photoacoustic signal, and the image construction means 26 generates a photoacoustic image based on the photoacoustic signal after detection / logarithmic conversion ( Step S3).
- the photoacoustic image reconstruction unit 24, the detection / logarithmic conversion unit 25, and the image construction unit 26 generate three-dimensional photoacoustic image data from three-dimensional data of the photoacoustic signal.
- the cross-sectional image generation unit 27 generates cross-sectional image data in which cross sections in a predetermined plane are integrated by a predetermined number of sheets from the photoacoustic three-dimensional image data (step S4).
- the cross-sectional image generation means 27 generates cross-sectional image data in which, for example, cross sections parallel to the acoustic wave detection surface of the probe 11 are integrated by a predetermined thickness.
- the Fourier transform means Fourier transforms the cross-sectional image generated in step S4 (step S5).
- the spatial frequency processing means 29 extracts a predetermined frequency component from the cross-sectional image data of the spatial frequency domain which has been subjected to Fourier transform (step S6).
- the inverse Fourier transform means 30 inverse Fourier transforms the data of the extracted predetermined frequency component (step S7).
- the display control means 31 displays the cross-sectional image data obtained by the inverse conversion on the display screen of the image display means 14 (step S8).
- the display control means 31 may arrange and display a plurality of cross-sectional image data after spatial frequency processing corresponding to the plurality of cross-sectional image data generated by the cross-sectional image generation means 27.
- the display control means 31 may display the cross-sectional image data (FIG. 5) before spatial frequency processing generated by the cross-sectional image generation means 27 and the cross-sectional image data (FIG. 9) after spatial frequency processing. .
- the cross-sectional image data before spatial frequency processing and the cross-sectional image data after spatial frequency processing may be displayed overlappingly with the display color changed.
- image data obtained by reconstructing a photoacoustic signal is subjected to Fourier transform, and predetermined spatial frequency components are extracted from image data in the spatial frequency domain to perform inverse Fourier transform.
- predetermined spatial frequency components are extracted from image data in the spatial frequency domain to perform inverse Fourier transform. For example, by using a spatial frequency filter as shown in FIG. 7, unnecessary low frequency components can be removed, and high frequency components (image noise) derived from tissue can be removed.
- the photoacoustic signal generated from the light absorber present inside the object is detected by each detector element with a time difference corresponding to the distance between the position of the light absorber and the detector element, It is not detected simultaneously by multiple detector elements.
- the detection signal itself is Fourier-transformed in the spatial direction, and even if a predetermined low frequency component is reduced from the detection signal in the spatial frequency domain, a blood vessel having a certain thickness can not be extracted.
- the image data after reconstruction is subjected to Fourier transform.
- a filter can be selected for blood vessel diameter information, and a desired thickness can be obtained by appropriately setting a filter to be used according to the observation target Blood vessels can be imaged.
- FIG. 7 shows an example using a filter that transmits frequency components in a certain range of distance from the origin
- spatial frequency components to be extracted are not limited to this.
- the spatial frequency that is the lower limit of the transmission band and the spatial frequency that is the upper limit may be changed according to the position in the wave number space.
- FIG. 11 shows an elliptical spatial frequency filter. If there is a region of high intensity in the wave number space, an elliptical spatial frequency filter may be used whose major axis is that region.
- the spatial frequency filter shown in FIG. 11 is used, high-frequency frequency components are extracted in the kx direction as compared to the ky direction.
- the spatial frequency filter is not limited to one that passes spatial frequency components in a predetermined band.
- FIG. 12 shows a spatial frequency filter that removes low frequency regions. When the spatial frequency filter shown in FIG. 12 is used, spatial frequency components above a certain spatial frequency can be extracted.
- the filter characteristic of the spatial frequency filter is not limited to a circle or an ellipse, and may be a polygon.
- a plurality of different wavelengths of light are emitted from the laser unit 13 to the subject, and the plurality of lights generated in the subject after the light of the plurality of wavelengths is emitted by the probe 11.
- Acoustic waves may be detected.
- the photoacoustic image generation means respectively reconstructs the photoacoustic signal detected corresponding to the light of a plurality of wavelengths, and generates a photoacoustic image.
- the Fourier transform means Fourier transforms each of the photoacoustic images corresponding to light of a plurality of wavelengths.
- the spatial frequency processing means 29 extracts predetermined spatial frequency components corresponding to each wavelength from the image data of the spatial frequency domain corresponding to the light of a plurality of wavelengths which has been subjected to Fourier transform, and the inverse Fourier transform means 30 Each of the extracted processing space frequency components is subjected to inverse Fourier transform.
- the light of the first wavelength and the light of the second wavelength are emitted from the laser unit 13 and irradiated to the subject, and the photoacoustic signal is detected when the light of each wavelength is irradiated.
- a photoacoustic image may be generated.
- the first wavelength is a wavelength corresponding to imaging of blood (blood vessels)
- the second wavelength is a wavelength corresponding to imaging of a drug (contrast agent).
- the first wavelength may be a wavelength corresponding to imaging of an artery
- the second wavelength may be a wavelength corresponding to imaging of a vein.
- the spatial frequency processing means 29 corresponds to the photoacoustic image data corresponding to the first wavelength and the second wavelength.
- Spatial frequency filters having different frequency characteristics can be used for the photoacoustic image data. That is, different spatial frequency components are extracted from the photoacoustic image data of the spatial frequency domain corresponding to the light of the first wavelength and the photoacoustic image data of the spatial frequency domain corresponding to the light of the second sound wave length. It is also good. For example, when the difference in thickness of blood vessels between arteries and veins is known in advance, different spatial frequency components are extracted from the photoacoustic image corresponding to the first wavelength and the photoacoustic image corresponding to the second wavelength. . By extracting spatial frequency components according to the object to be imaged with light of each wavelength, it is possible to extract an object to be observed from the photoacoustic image corresponding to each wavelength.
- FIG. 13 shows a photoacoustic image generation apparatus according to a second embodiment of the present invention.
- the photoacoustic image generation apparatus 10a of the present embodiment is different from the photoacoustic image generation apparatus 10 of the first embodiment shown in FIG. 1 in that the photoacoustic image generation apparatus 10a further includes a cross-sectional position selection unit 35 in the ultrasound unit 12a.
- the other points may be the same as in the first embodiment.
- the cross-sectional-position selecting unit 35 determines the cross-sectional position of the cross-sectional image data displayed on the display screen of the image display unit 14 according to the user operation.
- the display control means 31 causes the image display means 14 to display cross-sectional image data subjected to spatial frequency processing corresponding to the cross-sectional position designated by the user.
- the cross section position selection means 35 allows the user to select which position of cross section image data is to be displayed among the plurality of cross section image data shown in FIG. 4, for example.
- FIG. 14 shows an example of the display screen.
- the display control means 31 causes the image display means 14 to display, for example, a slide bar for specifying a cross-sectional position.
- Cross section position selection means determines a cross section position to be displayed according to the user's operation of the slide bar. For example, the left side of the slide bar in the plane of the drawing corresponds to the shallow position of the subject, and the right side corresponds to the deep position.
- the cross-sectional position of the cross-sectional image data after spatial frequency processing displayed on the upper portion of the slide bar changes according to the operation.
- the slide bar does not have to be provided below the cross-sectional image data, and may be provided above or to the left or right of the cross-sectional image data. Further, the slide bar does not have to be provided along with the cross-sectional image data, and may be displayed somewhere on the display screen.
- the cross-sectional-position selecting unit 35 selects the cross-sectional position of the cross-sectional image data to be displayed according to the user's operation, and the display control unit 31 determines the cross-section after spatial frequency processing of the selected cross-sectional position.
- Display image data The user can display a cross-sectional image at any cross-sectional position by operating the cross-sectional position selection unit 35.
- the user can observe the photoacoustic image in a moving image manner by, for example, using a slide bar or the like to operate so as to continuously change the cross-sectional position.
- the other effects are the same as in the first embodiment.
- FIG. 15 shows a photoacoustic image generation apparatus according to a third embodiment of the present invention.
- the photoacoustic image generation apparatus 10b of this embodiment is different from the photoacoustic image generation apparatus 10 of the first embodiment shown in FIG. 1 in that the photoacoustic image generation apparatus 10b further includes a deconvolution unit 36 in the ultrasound unit 12b.
- the other points may be the same as in the first embodiment.
- the deconvolution means 36 deconvolutes the light differential waveform which is a differential waveform of the light intensity of the light irradiated to the object from the photoacoustic signal reconstructed by the photoacoustic image reconstruction means 24. Generate The deconvolution means 36 converts the reconstructed photoacoustic signal from the signal in the time domain to the signal in the frequency domain, for example by discrete Fourier transform. Further, the light differential waveform is also converted from the signal in the time domain to the signal in the frequency domain by discrete Fourier transform. The deconvolution means 36 finds the inverse of the Fourier transformed light differential waveform as an inverse filter and applies the inverse filter to the Fourier transformed photoacoustic signal in the frequency domain.
- the light differential waveform is deconvoluted in the frequency domain signal. Thereafter, the inverse filtered photoacoustic signal is converted from the frequency domain signal to the time domain signal by inverse Fourier transform.
- the optical differential waveform may be deconvoluted from the pre-reconstruction photoacoustic signal.
- the deconvolution of the optical differential waveform will be described.
- a micro-absorbent particle which is a light absorber, and consider that this micro-absorbent particle absorbs pulse laser light to generate a pressure wave (photoacoustic pressure wave).
- the pressure waveform p micro (R, t) when a photoacoustic pressure wave generated from a micro-absorbing particle at position r is observed at position R, where t is time, is [Phys. Rev. Lett. 86 (2001) ] 3550.], it becomes the following spherical waves.
- I (t) is a time waveform of the light intensity of the excitation light
- the coefficient k is a conversion coefficient when the particle absorbs light and outputs an acoustic wave
- v s is the sound velocity of the object is there.
- Positions r and R are vectors indicating positions in space.
- the pressure generated from the micro-absorbing particles is a spherical wave proportional to the light pulse differential waveform as shown in the above equation.
- the pressure waveform obtained from the subject to be actually imaged is considered to be a waveform obtained by superimposing the above-mentioned micro absorption waveform because it has a more macroscopic absorber size (the principle of superposition).
- a (r ⁇ R) be the absorption distribution of particles that emit macro photoacoustic waves
- p macro (R, t) be an observed waveform of pressure from the macro absorber.
- the observation position R the photoacoustic wave from the absorbing particle located at the radius v s t from the observation position R is observed at each time, so the observation waveform p macro (R, t) has the following pressure It is shown by a waveform equation.
- the observed waveform shows a convolution type of light pulse differentiation.
- An absorber distribution is obtained by deconvolving the light pulse differential waveform from the observed waveform.
- the differential waveform of the light irradiated to the object is deconvoluted from the detected photoacoustic signal.
- the distribution of the light absorber can be obtained, and an absorption distribution image can be generated.
- Being able to image the distribution of the absorber makes it easier to check the position of a blood vessel or the like in the cross-sectional image after spatial frequency processing.
- the other effects are the same as in the first embodiment.
- the method of providing the photoacoustic image data to the user after spatial frequency processing is arbitrary, and is not limited to the display of the cross-sectional image as shown in FIG.
- processing is performed to extract predetermined frequency section components for three-dimensional photoacoustic image data, and a projection image is generated for three-dimensional photoacoustic image data after spatial frequency processing using maximum value projection method or the like.
- a projection image is generated for three-dimensional photoacoustic image data after spatial frequency processing using maximum value projection method or the like.
- And may be displayed on the image display means 14.
- three-dimensional display may be performed by performing volume rendering or the like on three-dimensional photoacoustic image data.
- the cross-sectional image generation unit 27 performs the two-dimensional Fourier transform of the cross-sectional image by the Fourier transform unit 28
- the three-dimensional Fourier transform may be performed on the three-dimensional photoacoustic image data by the Fourier transform unit 28 without using the cross-sectional image generation unit 27.
- a blood vessel or the like having a desired thickness can be imaged by extracting a predetermined spatial frequency region.
- the Fourier transform means 28 has been described as performing Fourier transform on the image generated by the image construction means 26.
- the signal to be Fourier transformed by the Fourier transform means 28 is at least a photoacoustic signal reconstruction means It may be reconstructed at 24 and is not limited to the image generated by the image construction means 26.
- the Fourier transform means 28 may perform Fourier transform on the output signal of the photoacoustic image reconstruction means 24. In such a case, processing after detection and logarithmic conversion may be performed on a signal obtained by the inverse Fourier transform means 30 performing inverse transform.
- the said each embodiment mainly demonstrated the example which images a blood-vessel part, it is not limited to this.
- imaging a tubular structure such as a nerve or a lymphatic vessel with a photoacoustic image
- imaging a structure of a desired size by extracting a predetermined frequency component in the spatial frequency domain it can.
- the photoacoustic image generation apparatus of this invention is not limited only to the said embodiment, A various correction and change are comprised from the structure of the said embodiment Also included in the scope of the present invention.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Public Health (AREA)
- Pathology (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Biophysics (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Psychiatry (AREA)
- Signal Processing (AREA)
- Physiology (AREA)
- Artificial Intelligence (AREA)
- Mathematical Physics (AREA)
- Acoustics & Sound (AREA)
- Vascular Medicine (AREA)
- Data Mining & Analysis (AREA)
- Databases & Information Systems (AREA)
- Epidemiology (AREA)
- Primary Health Care (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/469,626 US9974440B2 (en) | 2012-02-28 | 2014-08-27 | Photoacoustic image generation device and method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012040977A JP5762995B2 (ja) | 2012-02-28 | 2012-02-28 | 光音響画像生成装置及び方法 |
| JP2012-040977 | 2012-02-28 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US14/469,626 Continuation US9974440B2 (en) | 2012-02-28 | 2014-08-27 | Photoacoustic image generation device and method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2013128846A1 true WO2013128846A1 (ja) | 2013-09-06 |
Family
ID=49082062
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2013/000929 Ceased WO2013128846A1 (ja) | 2012-02-28 | 2013-02-20 | 光音響画像生成装置及び方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9974440B2 (enExample) |
| JP (1) | JP5762995B2 (enExample) |
| WO (1) | WO2013128846A1 (enExample) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20170224286A1 (en) * | 2014-09-26 | 2017-08-10 | Terumo Kabushiki Kaisha | Tomographic image forming apparatus and control method |
| JP2018057560A (ja) * | 2016-10-04 | 2018-04-12 | コニカミノルタ株式会社 | 超音波信号処理装置、超音波信号処理方法、及び、超音波診断装置 |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6429444B2 (ja) * | 2013-10-02 | 2018-11-28 | キヤノン株式会社 | 画像処理装置、撮像装置及び画像処理方法 |
| US9983063B1 (en) * | 2014-04-15 | 2018-05-29 | Lockheed Martin Corporation | Multispectral imaging via coded aperture |
| WO2016140372A1 (en) | 2015-03-04 | 2016-09-09 | Canon Kabushiki Kaisha | Object information acquiring apparatus and method for displaying image relating to object |
| JP6732476B2 (ja) * | 2015-03-04 | 2020-07-29 | キヤノン株式会社 | 被検体情報取得装置 |
| US10743770B2 (en) * | 2015-05-26 | 2020-08-18 | Canon Kabushiki Kaisha | Photoacoustic device |
| WO2017014167A1 (en) * | 2015-07-21 | 2017-01-26 | Canon Kabushiki Kaisha | Object information acquiring apparatus and object information acquiring method |
| JP6824636B2 (ja) * | 2015-07-21 | 2021-02-03 | キヤノン株式会社 | 被検体情報取得装置および被検体情報取得方法 |
| US20170112383A1 (en) * | 2015-10-23 | 2017-04-27 | Nec Laboratories America, Inc. | Three dimensional vein imaging using photo-acoustic tomography |
| JP6742734B2 (ja) * | 2016-01-21 | 2020-08-19 | キヤノン株式会社 | 被検体情報取得装置および信号処理方法 |
| US20200315574A1 (en) * | 2016-06-24 | 2020-10-08 | Canon Kabushiki Kaisha | Apparatus and information processing method |
| US10438382B2 (en) | 2017-03-27 | 2019-10-08 | Canon Kabushiki Kaisha | Image processing apparatus and image processing method |
| FR3077641B1 (fr) * | 2018-02-07 | 2020-02-21 | TiHive | Systeme d'imagerie terahertz a reflexion |
| JP7108985B2 (ja) * | 2018-08-24 | 2022-07-29 | キヤノン株式会社 | 画像処理装置、画像処理方法、プログラム |
| CN111248858B (zh) * | 2020-01-10 | 2023-07-28 | 南京景瑞康分子医药科技有限公司 | 一种基于频域波数域的光声断层成像重建方法 |
| CN111012318B (zh) * | 2020-01-18 | 2022-10-28 | 中川新迈科技有限公司 | 一种用于光声乳腺成像的面聚焦阵列探测器及系统 |
| CN111012317B (zh) * | 2020-01-18 | 2022-10-25 | 中川新迈科技有限公司 | 一种光声乳腺的图像重建方法及系统 |
| CN111012316B (zh) * | 2020-01-18 | 2022-10-28 | 中川新迈科技有限公司 | 一种光声乳腺的图像重建系统 |
| US11497436B1 (en) * | 2022-05-17 | 2022-11-15 | Ix Innovation Llc | Systems, methods, and bone mapper devices for real-time mapping and analysis of bone tissue |
| WO2023243075A1 (ja) * | 2022-06-17 | 2023-12-21 | 株式会社アドバンテスト | 光音響波測定装置、方法、プログラム、記録媒体 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005218684A (ja) * | 2004-02-06 | 2005-08-18 | Toshiba Corp | 非侵襲生体情報映像装置及び非侵襲生体情報映像方法 |
| JP2011217767A (ja) * | 2010-04-02 | 2011-11-04 | Canon Inc | 光音響イメージング装置及び光音響イメージング方法 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5136172A (en) * | 1989-08-16 | 1992-08-04 | Hitachi, Ltd. | Method and apparatus for detecting photoacoustic signal |
| JPH07282247A (ja) | 1994-04-06 | 1995-10-27 | Ge Yokogawa Medical Syst Ltd | 画像処理方法及び画像処理装置 |
| US6216025B1 (en) * | 1999-02-02 | 2001-04-10 | Optosonics, Inc. | Thermoacoustic computed tomography scanner |
| US7525661B2 (en) * | 2004-02-17 | 2009-04-28 | Andreas Mandelis | Laser photo-thermo-acoustic (PTA) frequency swept heterodyned lock-in depth profilometry imaging system |
| US20070179365A1 (en) * | 2006-01-31 | 2007-08-02 | Glucon Inc. | Method for monitoring body fluids |
| GB2444078A (en) * | 2006-11-24 | 2008-05-28 | Ucl Business Plc | Ultrasonic sensor which detects direct and reflected signals emanating from sample being imaged |
| JP5460000B2 (ja) * | 2008-08-20 | 2014-04-02 | キヤノン株式会社 | イメージング装置およびイメージング方法 |
| JP2011005042A (ja) * | 2009-06-26 | 2011-01-13 | Canon Inc | 光音響イメージング装置及び光音響イメージング方法 |
| AU2010286592B2 (en) * | 2009-08-28 | 2015-08-13 | Visen Medical, Inc. | Systems and methods for tomographic imaging in diffuse media using a hybrid inversion technique |
| US8862206B2 (en) * | 2009-11-12 | 2014-10-14 | Virginia Tech Intellectual Properties, Inc. | Extended interior methods and systems for spectral, optical, and photoacoustic imaging |
| JP5683213B2 (ja) * | 2009-11-17 | 2015-03-11 | キヤノン株式会社 | 画像形成装置及び画像形成方法 |
| JP5451414B2 (ja) * | 2010-01-18 | 2014-03-26 | キヤノン株式会社 | 被検体情報処理装置および被検体情報処理方法 |
| WO2011091423A2 (en) * | 2010-01-25 | 2011-07-28 | The Arizona Board Of Regents On Behalf Of The University Of Arizona | Ultrasonic/photoacoustic imaging devices and methods |
| US8930145B2 (en) * | 2010-07-28 | 2015-01-06 | Covidien Lp | Light focusing continuous wave photoacoustic spectroscopy and its applications to patient monitoring |
| JP5661451B2 (ja) * | 2010-12-27 | 2015-01-28 | キヤノン株式会社 | 被検体情報取得装置及び被検体情報取得方法 |
| US8886294B2 (en) * | 2011-11-30 | 2014-11-11 | Covidien Lp | Methods and systems for photoacoustic monitoring using indicator dilution |
| US20130184544A1 (en) * | 2012-01-13 | 2013-07-18 | Nellcor Puritan Bennett Llc | Body-mounted photoacoustic sensor unit for subject monitoring |
-
2012
- 2012-02-28 JP JP2012040977A patent/JP5762995B2/ja active Active
-
2013
- 2013-02-20 WO PCT/JP2013/000929 patent/WO2013128846A1/ja not_active Ceased
-
2014
- 2014-08-27 US US14/469,626 patent/US9974440B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005218684A (ja) * | 2004-02-06 | 2005-08-18 | Toshiba Corp | 非侵襲生体情報映像装置及び非侵襲生体情報映像方法 |
| JP2011217767A (ja) * | 2010-04-02 | 2011-11-04 | Canon Inc | 光音響イメージング装置及び光音響イメージング方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20170224286A1 (en) * | 2014-09-26 | 2017-08-10 | Terumo Kabushiki Kaisha | Tomographic image forming apparatus and control method |
| US10898140B2 (en) * | 2014-09-26 | 2021-01-26 | Terumo Kabushiki Kaisha | Tomographic image forming apparatus and control method |
| JP2018057560A (ja) * | 2016-10-04 | 2018-04-12 | コニカミノルタ株式会社 | 超音波信号処理装置、超音波信号処理方法、及び、超音波診断装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013176414A (ja) | 2013-09-09 |
| JP5762995B2 (ja) | 2015-08-12 |
| US20140371571A1 (en) | 2014-12-18 |
| US9974440B2 (en) | 2018-05-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5762995B2 (ja) | 光音響画像生成装置及び方法 | |
| US9888856B2 (en) | Photoacoustic image generation apparatus, system and method | |
| JP5704998B2 (ja) | 光音響装置およびその制御方法 | |
| JP5743957B2 (ja) | 光音響画像生成装置及び方法 | |
| JP5810050B2 (ja) | 音響画像生成装置および音響画像生成方法 | |
| JP5779567B2 (ja) | 光音響信号処理装置及び方法 | |
| JP5777394B2 (ja) | 光音響画像化方法および装置 | |
| JP2013233386A (ja) | 光音響画像生成装置、システム、及び方法 | |
| JP6415050B2 (ja) | 被検体情報取得装置、表示方法、およびプログラム | |
| JP2013158531A (ja) | 被検体情報取得装置及び被検体情報取得方法 | |
| JP2013005957A (ja) | ドプラ画像表示方法および装置 | |
| JP2015142740A (ja) | 光音響装置、情報処理装置および表示方法 | |
| US20180228377A1 (en) | Object information acquiring apparatus and display method | |
| EP3329843B1 (en) | Display control apparatus, display control method, and program | |
| JP5864905B2 (ja) | 被検体情報取得装置及び被検体情報取得方法 | |
| JP2013128760A (ja) | 光音響画像生成装置および光音響画像生成方法 | |
| JP5502686B2 (ja) | 光音響画像診断装置、画像生成方法、及びプログラム | |
| JP6218908B2 (ja) | 方法 | |
| JP2012231879A (ja) | 光音響画像化方法および装置 | |
| JP5946230B2 (ja) | 光音響画像化方法および装置 | |
| JP6419281B2 (ja) | 情報処理装置および方法 | |
| JP2017164222A (ja) | 処理装置および処理方法 | |
| JP2019083887A (ja) | 情報処理装置および情報処理方法 | |
| JP6643108B2 (ja) | 被検体情報取得装置および被検体情報取得方法 | |
| JP6113330B2 (ja) | 装置および画像生成方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 13754015 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 13754015 Country of ref document: EP Kind code of ref document: A1 |