WO2012137285A1 - 在圏検知システム、在圏検知方法及びプログラム - Google Patents
在圏検知システム、在圏検知方法及びプログラム Download PDFInfo
- Publication number
- WO2012137285A1 WO2012137285A1 PCT/JP2011/058528 JP2011058528W WO2012137285A1 WO 2012137285 A1 WO2012137285 A1 WO 2012137285A1 JP 2011058528 W JP2011058528 W JP 2011058528W WO 2012137285 A1 WO2012137285 A1 WO 2012137285A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- reception level
- person
- receiver
- interval
- determination unit
- Prior art date
Links
- 238000001514 detection method Methods 0.000 title claims abstract description 139
- 230000008859 change Effects 0.000 claims abstract description 8
- 230000005540 biological transmission Effects 0.000 claims description 12
- 238000004891 communication Methods 0.000 claims description 6
- 230000004044 response Effects 0.000 claims description 2
- 238000005259 measurement Methods 0.000 description 24
- 230000006870 function Effects 0.000 description 8
- 238000000034 method Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000008054 signal transmission Effects 0.000 description 3
- 238000012935 Averaging Methods 0.000 description 2
- 230000006399 behavior Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000009825 accumulation Methods 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 230000001902 propagating effect Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/04—Systems determining presence of a target
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/003—Bistatic radar systems; Multistatic radar systems
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B21/00—Alarms responsive to a single specified undesired or abnormal condition and not otherwise provided for
- G08B21/18—Status alarms
- G08B21/22—Status alarms responsive to presence or absence of persons
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V8/00—Prospecting or detecting by optical means
- G01V8/10—Detecting, e.g. by using light barriers
- G01V8/20—Detecting, e.g. by using light barriers using multiple transmitters or receivers
Definitions
- the present invention relates to a location detection system, a location detection method, and a program for detecting whether or not a person is present in a predetermined space.
- a microwave with high straightness such as 10.5 GHz
- a system for detecting the presence or absence of a person by directly irradiating the human body and receiving a reflected wave has been proposed.
- a microwave is used, a dedicated transmitter and receiver are required, and the entire system becomes expensive.
- the detection range is limited only to the direction in which the device emits the microwave. For this reason, this system is not suitable for applications such as detecting the presence of the entire room.
- a human behavior detection system uses radio waves transmitted from a wireless system that provides services with constant transmission power, such as TV broadcast waves, as a transmission source.
- This system uses the principle that the reception level of radio waves varies according to changes in the indoor multipath environment caused by the movement of a person, and detects the person's location by constantly detecting the fluctuation range of the reception level of radio waves. .
- a dedicated location detection system can be realized using a wireless communication device installed indoors for other purposes without requiring dedicated hardware.
- this system uses not only the radio wave transmitted directly from the transmitter to the receiver but also the reflected wave propagating throughout the room, it is possible to detect the presence of a wide room.
- the transmission function and the reception function in the located area detection system be mounted on battery-powered equipment such as a home appliance remote control and sensor equipment. This is because if these functions are installed in the remote control of the home appliance, it becomes easy to control the home appliance based on the location detection information.
- the present invention has been made in view of the above circumstances, and provides a located area detection system, a located area detection method, and a program that can easily and widely detect the person's area while reducing power consumption. For the purpose.
- a location detection system includes a transmitter that transmits a multipath radio signal in a predetermined space, and a location of a person by receiving the transmitted radio signal. And a receiver for detection.
- the first determination unit determines whether or not there is a change in the presence / absence state of the person based on the reception level of the radio signal received intermittently at the first interval.
- the second determination unit varies the reception level of the radio signal received at a second interval shorter than the first interval. Based on the above, the presence / absence of the person is determined.
- the interval for receiving the radio signal is shortened to be in the service area. Receives detection signals continuously. This eliminates the need to constantly receive a radio signal, so that it is possible to easily and widely detect the person's location while reducing power consumption.
- FIG. 1 It is a schematic diagram which shows schematic structure of the located area detection system which concerns on Embodiment 1 of this invention. It is a block diagram which shows the structure of the receiver of FIG. It is a graph which shows a reception level. 3 is a flowchart (part 1) illustrating an operation of the receiver of FIG. 6 is a flowchart (part 2) illustrating an operation of the receiver of FIG. It is a schematic diagram which shows schematic structure of the located area detection system which concerns on Embodiment 2 of this invention. It is a block diagram which shows the structure of the receiver of FIG.
- Embodiment 1 FIG. First, a first embodiment of the present invention will be described.
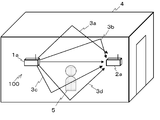
- FIG. 1 shows the configuration of a location detection system 100 according to Embodiment 1 of the present invention.
- the located area detection system 100 includes a transmitter 1a and a receiver 2a.
- the transmitter 1a transmits a location detection signal that is a multipath radio signal.
- the receiver 2a receives the transmitted area detection signal and detects the person's area. Both the transmitter 1a and the receiver 2a are installed in the in-zone detection area 4 as a predetermined space.
- the transmitter 1a is, for example, a wireless LAN (Local Area Network) base station or a home controller, and periodically transmits a beacon signal.
- the transmitter 1a can be used as long as it periodically transmits radio waves with a constant transmission output. For example, a broadcast wave of television or radio may be received and transferred into the in-zone detection area 4.
- the in-zone detection area 4 in which the transmitter 1a and the transmitter 2a are arranged is a predetermined space in a range where the person 5 enters and exits and the person 5 is detected.
- the location detection area 4 may be, for example, a single room or may extend over a plurality of rooms.
- the radio wave transmitted from the transmitter 1a is repeatedly reflected, transmitted, and diffracted by a wall surface, a ceiling, a floor in the in-zone detection area 4, or a fixture arranged in the in-zone detection area 4, for example, a propagation path
- the signal reaches the receiver 2a as a multipath radio signal via 3a, 3b, 3c, 3d and the like.
- FIG. 2 shows the configuration of the receiver 2a.
- the receiver 2 a includes an antenna 6, a radio circuit 7 a, a reception level measurement circuit 8, a located area determination unit 9, a control unit 10, and a storage unit 11.
- the antenna 6 receives a multipath radio signal transmitted from the transmitter 1a.
- the antenna 6 is an antenna with a small directivity, such as a dipole antenna, in order to facilitate reception of multipath radio signals.
- the radio signal received by the antenna 6 is input to the radio circuit 7a.
- the radio circuit 7a includes, for example, a filter that limits the band of the radio signal, an LNP (Low Noise Amp) that amplifies the radio signal, a mixer that converts the radio signal into an IF (Intermediate Frequency) stage, and the like.
- the output of the radio circuit 7a is input to the reception level measurement circuit 8.
- the reception level measurement circuit 8 measures the reception level of the radio signal based on the output of the radio circuit 7a.
- the reception level measured by the reception level measurement circuit 8 is output to the in-zone determination unit 9.
- the in-zone determination unit 9 functions as a first determination unit and a second determination unit.
- the location determination unit 9 determines whether or not the presence / absence state of the person 5 has changed based on the reception level of the radio signal intermittently received at the first interval (location detection interval T1). judge.
- the located area determination unit 9 receives the radio signal received at the located area detection interval T2 as the second interval shorter than the located area detection interval T1. Based on the variation in the reception level, the presence / absence of the person 5 is determined.
- the control unit 10 performs overall control of the entire receiver 2a.
- the control unit 10 controls the timing for operating the radio circuit 7a and the reception level measurement circuit 8. That is, the control unit 10 switches the timing at which the radio circuit 7a and the reception level measurement circuit 8 operate between the first reception interval and the second reception interval according to the determination result of the in-zone determination unit 9. .
- the storage unit 11 stores data used for determination by the in-zone determination unit 9, determination results, and the like.
- the located area determination unit 9 and the control unit 10 are, for example, microcomputers, and each function is realized by the CPU executing a program stored in the memory.
- the storage unit 11 includes, for example, a flash memory or a RAM (Random Access Memory).
- the transmitter 1a When the transmitter 1a starts operation, the transmitter 1a periodically transmits a beacon signal.
- a beacon signal For example, when the transmitter 1a is a wireless LAN base station, beacon signals are generally transmitted at intervals of about 100 ms.
- the beacon signal transmitted from the transmitter 1a reaches the receiver 2a via the propagation paths 3a, 3b, 3c, 3d and the like.
- the reception level at the receiver 2a is stable and becomes a substantially constant value.
- any of the propagation paths 3 a, 3 b, 3 c, 3 d, etc. is blocked or reflected by the person 5, so that the reception level at the receiver 2 a is lowered. It becomes larger than necessary or fluctuates according to the movement of the person 5.
- the receiver 2a parameters relating to the operation of the receiver 2a are set in advance.
- the setting of the receiver 2a will be described with reference to FIG.
- the upper limit value and the lower limit value of the fluctuation range of the reception level when no person is present are set in the storage unit 11 of the receiver 2a.
- the difference between the upper limit value and the lower limit value is a value of about 5 dB to 10 dB, although it depends on the environment where the in-zone detection system 100 is installed.
- the median reception level when the person is absent is adjusted using the measurement result when the receiver 2a determines that the person is absent.
- the control unit 10 sets the average value of the reception levels of radio signals when a person is absent for a predetermined number of times as the median value of the reception levels.
- the upper limit value and the lower limit value can be updated based on the measurement result when it is determined that the person is absent.
- the in-zone detection interval T1 is set according to the device to be controlled.
- the in-zone detection interval T1 is set to an interval of several minutes in a low-urgency application in which the operation of home appliances such as an air conditioner is stopped in the absence.
- the operation of the receiver 2a is different depending on whether the previous presence detection result in the receiver 2a is determined to be present or not. First, the operation when it is determined that the previous location detection result is absent will be described with reference to FIGS. 3 and 4.
- FIG. 3 shows an example of the measurement result of the reception level determined by the location determination unit 9 when it is determined that the previous location detection result is absent.
- FIG. 4 shows a flowchart showing processing when it is determined that the previous location detection result in the receiver 2a is absent.
- the reception level measurement circuit 8 receives the in-zone detection signal transmitted by the transmitter 1a once and measures the reception level (step S101).
- the in-zone detection signal received by the antenna 6 is input to the reception level measurement circuit 8 via the radio circuit 7a.
- the reception level measurement circuit 8 measures the reception level of the received beacon signal.
- the measured reception level is input to the in-zone determination unit 9.
- the area determination unit 9 determines whether the reception level of the received area detection signal is equal to or lower than the upper limit L1 and lower limit L2 of the fluctuation range of the reception level when no person is present, that is, within the set range. It is determined whether or not (step S102).
- the control unit 10 Leaves the in-zone detection result absent, and does not update the in-zone detection result (step S103). Such processing is performed at the reception levels at times t1, t2, and t3 in FIG.
- control unit 10 shifts the receiver 2a to the sleep state (step S104).
- the control unit 10 turns off the power of the wireless circuit 7a and the reception level measurement circuit 8.
- the control part 10 sets the located area detection part 9 and its operation mode to the low power consumption mode of a microcomputer, for example.
- control unit 10 operates a timer (not shown) in the sleep state, and waits for the set in-zone detection interval T1 to elapse (step S105).
- control unit 10 shifts the entire receiver 2a to the reception standby state (step S106) and returns to step S101.
- the control unit 10 increases the reception frequency of the in-zone detection signal by the radio circuit 7a and the reception level measurement circuit 8 for a certain period of time (that is, the reception interval is set as the second in-zone detection interval T2), The reception level is measured continuously (step S107).
- the in-zone detection interval T2 is an interval of several hundred ms to several sec, and is sufficiently shorter than the in-zone detection interval T1.
- the area determination unit 9 calculates the standard deviation S of the area detection signal continuously received with an increased reception frequency, and the standard deviation S of the calculated measurement result determines the person's area. It is determined whether or not the threshold is equal to or greater than (step S108). When the standard deviation S is less than the threshold (step S108; No), the located area determination unit 9 leaves the located area detection result of the receiver 2a absent and does not update the located area detection result (step S103).
- step S108 when the calculated standard deviation S is greater than or equal to the threshold (step S108; Yes), the location determination unit 9 updates the location detection result of the receiver 2a to the location (step S109). Here, as necessary, the control unit 10 notifies the control target device of the person's location.
- step S110 the control unit 10 shifts the receiver 2a to the sleep state (step S110), waits for the set in-zone detection interval T1 to elapse (step S111), and when the in-zone detection interval T1 elapses. Then, the entire receiver 2a is shifted to the reception standby state (step S112). After step S112 is completed, the process proceeds to step S201 in FIG.
- the receiver 2a receives the location detection signal transmitted from the transmitter 1a and measures the reception level (step S201). At this time, a process of receiving and averaging the in-zone detection signal a plurality of times may be performed.
- the location determination unit 9 determines whether or not the reception level of the received location detection signal is within a variation range of the reception level when the installed person is absent, that is, the upper limit value L1 or less and the lower limit value L2 or more. Is determined (step S202).
- the location determination unit 9 keeps the location detection result of the receiver 2a as the location, The detection result is not updated (step S203).
- control unit 10 causes the entire receiver 2a to transition to the sleep state (step S204).
- control unit 10 operates the timer and causes the entire receiver 2a to wait for a time corresponding to the set location detection interval T1 (step S205).
- the control unit 10 shifts the receiver 2a to the reception standby state (step S206). Thereafter, the receiver 2a returns to Step S201.
- the control unit 10 determines that the radio circuit 7a and the reception level measurement circuit 8 are present for a certain period of time.
- the reception frequency of the area detection signal is increased (that is, the reception interval is set as the area detection interval T2), the area detection signal is continuously received, and the reception level measurement circuit 8 measures the reception level (step S207).
- the area determination unit 9 calculates the standard deviation S of the area detection signal continuously received with an increased reception frequency, and the standard deviation S of the calculated measurement result determines the person's area. It is determined whether it is below the threshold value (step S208). When the standard deviation S is larger than the threshold (step S208; No), the located area determination unit 9 leaves the located area detection result of the receiver 2a absent and does not update the located area detection result (step S203).
- the in-zone determination unit 9 updates the in-zone detection result of the receiver 2a to absence (step S209).
- the control unit 10 notifies the device to be controlled of the absence of a person.
- step S210 the control unit 10 shifts the receiver 2a to the sleep state (step S210), waits for the set in-zone detection interval T1 to elapse (step S211), and when the in-zone detection interval T1 elapses. Then, the entire receiver 2a is shifted to the reception standby state (step S212). After step S212 ends, the process returns to step S101 in FIG.
- the receiver 2a receives the multipath presence detection signal at the location detection interval T1 having a long interval, and the reception level has changed. Only when it is detected, the interval detection signal reception interval is shortened to T2 to continuously receive the location detection signal. As a result, it is not necessary to constantly receive the in-zone detection signal, so that it is possible to detect a person's zone in a simple and wide range while reducing power consumption.
- the location detection system 100 can be constructed simply and at low cost without using a dedicated device for location detection in the transmitter 1a for the location detection signal.
- the home appliance can be controlled based on the result of the area detection using the area detection system, the convenience for the user is increased.
- Embodiment 2 FIG. Next, a second embodiment of the present invention will be described.
- a beacon signal transmitted from the transmitter 1a is used as the location detection signal.
- a remote controller or a sensor device is used for the transmitter 1a. More specifically, a location detection signal is transmitted from a parent device of a sensor device that performs wireless communication with the remote controller or the sensor device, or a home appliance that is operated by the remote controller.
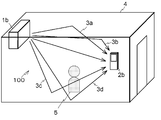
- FIG. 6 shows the configuration of the located area detection system 100 according to the second embodiment.
- the transmitter 1b is a parent device of a sensor device that performs wireless communication with a remote controller or a controller, or a home appliance that is operated with the remote controller.
- Other configurations are the same as those of the first embodiment.
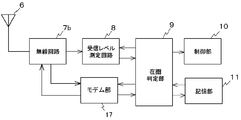
- the receiver 2 b includes an antenna 6, a radio circuit 7 b, a reception level measurement circuit 8, a located area determination unit 9, a control unit 10, a storage unit 11, and a modem unit 17.
- the radio circuit 7 is connected to the reception level measurement circuit 8 and the modem 17.
- the modem 17 has a function of modulating / demodulating communication signals.
- the radio circuit 7b includes a reception circuit and a transmission circuit composed of PA (Power Amp.) And the like. Other configurations are the same as those of the first embodiment.
- the transmitter 1b When the transmitter 1b starts operating, it waits for access from the receiver 2b.
- the location determination unit 9 transmits a request for acquiring the location detection intervals T1 and T2 and the next location detection signal transmission time to the transmitter 1b.
- the transmitted request is modulated by the modem unit 17 and wirelessly transmitted via the wireless circuit 7 b and the antenna 6.
- the request transmitted wirelessly is received by the transmitter 1b.
- the transmitter 1b transmits the in-zone detection interval T1 and the next in-zone detection signal transmission time to the receiver 2b.
- the data transmitted from the transmitter 1b is input to the location detection unit 9 via the antenna 6, the radio circuit 7b, and the modem unit 17 of the receiver 2b.
- the in-zone detection unit 9 writes the in-zone detection interval T1 in the storage unit 11, and shifts the receiver 2b to the sleep state by the timer control until the next in-zone detection signal transmission time.
- the receiver 2b shifts to the reception standby state and receives the located area detection signal transmitted from the transmitter 1b.
- the transmitter 1b and the receiver 2b need to have accurate clocks.
- a ceramic oscillator mainly used as a clock for consumer equipment has a clock accuracy of about 0.1%. This is an error of 60 msec at a time interval of 1 minute. Therefore, it is necessary to lengthen the reception waiting time of the presence detection signal on the receiver 2b side in accordance with the clock error. Further, error accumulation can be reduced by correcting the clock error according to the reception timing of the in-zone detection signal.
- the in-zone detection signal received by the antenna 6 is input to the reception level measurement circuit 8 via the radio circuit 7a.
- the reception level of the located area detection signal transmitted by the transmitter 1 b is measured and input to the located area determination unit 9. At this time, a process of receiving and averaging the in-zone detection signal a plurality of times may be performed.
- the reception level input to the location determination unit 9 is compared with the upper limit value and the lower limit value of the fluctuation range of the reception level when no person is present.
- the upper limit value and the lower limit value of the fluctuation range of the reception level are set and adjusted in advance in the receiver 2b as in the first embodiment.
- the location determination unit 9 of the receiver 2b When the previous location detection result in the receiver 2b is absent, when the reception level is higher than the upper limit value or lower than the lower limit value, the location determination unit 9 of the receiver 2b Then, a continuous transmission request for the presence detection signal is transmitted.
- the location determination unit 9 of the receiver 2b sends the transmitter 1b On the other hand, a continuous transmission request for the presence detection signal is transmitted.
- the transmitter 1b that has received the continuous transmission request for the location detection signal continuously transmits the location detection signal. Other operations are the same as those in the first embodiment.
- a radio signal is received only when a multipath radio signal is received at a long-range in-zone detection interval T1 and a change in the reception level is detected.
- the interval detection signal is shortened to T2 to continuously receive the in-zone detection signal. This eliminates the need to constantly receive a radio signal, so that it is possible to easily and widely detect the person's location while reducing power consumption.
- the in-zone detection signal is transmitted with low frequency, and only when there is a request from the receiver 2b, the in-zone detection signal is transmitted with an increased frequency.
- the power consumption of the machine 1b can be reduced.
- the home appliance can be controlled based on the location detection information using the location detection system, the convenience for the user is increased.
- the reception level measurement result is equal to or lower than the upper limit value L1 and lower limit value L2 of the fluctuation range of the reception level when no person is present, or is greater than the upper limit value L1 or smaller than the lower limit value L2.
- This determination is made by receiving the in-zone detection signal once, but it may be determined by the result of receiving the in-zone detection signal a plurality of times. In this case, for example, the determination may be made by majority decision of a plurality of received results, or may be determined using an average value. In this way, the determination reliability can be further improved.
- the upper limit value L1 and the lower limit value L2 of the fluctuation range of the reception level when no person is present are the absolute values of the reception level. You may make it make a deviation into a threshold value. In this way, the determination reliability can be further improved.
- the program to be executed is a computer-readable recording medium such as a flexible disk, a CD-ROM (Compact Disc-Read-Only Memory), a DVD (Digital Versatile Disc), and an MO (Magneto-Optical Disc).
- a system that executes the above-described thread may be configured by storing and distributing the program in a medium and installing the program.
- the program may be stored in a disk device or the like of a predetermined server device on a communication network such as the Internet, and may be downloaded, for example, superimposed on a carrier wave.
- This invention is suitable for detecting whether or not there is a person in a predetermined space.
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Business, Economics & Management (AREA)
- Emergency Management (AREA)
- Geophysics And Detection Of Objects (AREA)
- Mobile Radio Communication Systems (AREA)
- Radar Systems Or Details Thereof (AREA)
- Emergency Alarm Devices (AREA)
Abstract
Description
まず、この発明の実施の形態1について説明する。
次に、この発明の実施の形態2について説明する。
2a、2b 受信機
3a、3b、3c、3d 伝搬経路
4 在圏検知エリア
5 人
6 アンテナ
7a、7b 無線回路
8 受信レベル測定回路
9 在圏判定部
10 制御部
11 記憶部
17 モデム部
100 在圏検知システム
Claims (11)
- 所定の空間内において、マルチパスの無線信号を送信する送信機と、送信された無線信号を受信して人物の在圏を検知する受信機とを備え、
前記受信機は、
第1の間隔で間欠的に受信される前記無線信号の受信レベルに基づいて、人物の在圏/不在の状態に変化があったか否かを判定する第1の判定部と、
前記第1の判定部で前記無線信号の受信レベルが変化したと判定された場合に、前記第1の間隔よりも短い第2の間隔で受信される前記無線信号の受信レベルのばらつきに基づいて、人物の在圏/不在を判定する第2の判定部と、
を備える在圏検知システム。 - 前記送信機は、
所定の空間内に設置され一定の送信電力で前記無線信号を送信する所定の無線通信サービスに用いられる送信機である、
請求項1に記載の在圏検知システム。 - 前記送信機は、
前記第1の間隔及び前記第2の間隔のいずれかで前記無線信号を送信可能であり、
前記受信機からの要求により、送信間隔を前記第1の間隔から前記第2の間隔に切り替え、
前記受信機は、
前記第1の判定部で、人物の在圏/不在の状態に変化があったと判定された場合に、前記送信機に、送信頻度を上げる要求を送信する、
請求項1又は2に記載の在圏検知システム。 - 前記第1の判定部は、
前記無線信号の受信レベルに関するデータが、人物不在時の受信レベルの変動範囲内に収まっているか否かにより、人物の在圏/不在の状態に変化があったと判定する、
請求項1乃至3のいずれか一項に記載の在圏検知システム。 - 過去に測定された前記無線信号の受信レベルに基づいて、人物不在時の受信レベルの変動範囲を調整する調整部をさらに備える、
請求項4に記載の在圏検知システム。 - 前記第1の判定部は、
複数回受信された前記無線信号の受信レベルの平均値が、人物不在時の受信レベルの変動範囲内に収まっているか否かにより、人物の在圏/不在の状態に変化があったと判定する、
請求項4又は5に記載の在圏検知システム。 - 前記第1の判定部は、
複数回受信された前記無線信号の受信レベルのうち、人物不在時の受信レベルの変動範囲内に収まっていないものの数が半数を上回るか否かにより、人物の在圏/不在の状態に変化があったと判定する、
請求項4又は5に記載の在圏検知システム。 - 前記第2の判定部は、
複数回受信された前記無線信号の受信レベルの標準偏差が、閾値を超える場合に、人物の在圏/不在を判定する、
請求項4に記載の在圏検知システム。 - 前記閾値を、
過去に測定された前記無線信号の受信レベルに基づいて調整する調整部をさらに備える、
請求項8に記載の在圏検知システム。 - 所定の空間内において、マルチパスの無線信号を送信する送信機と、送信された無線信号を受信して人物の在圏を検知する受信機とを備えるシステムを用いた在圏検知方法であって、
前記受信機により、第1の間隔で間欠的に受信される前記無線信号の受信レベルに基づいて、人物の在圏/不在の状態に変化があったか否かを判定する第1の判定工程と、
前記第1の判定工程において前記無線信号の受信レベルが変化したと判定された場合に、前記受信機により、前記第1の間隔よりも短い第2の間隔で受信される前記無線信号の受信レベルのばらつきに基づいて、人物の在圏/不在を判定する第2の判定工程と、
を含む在圏検知方法。 - 所定の空間内において、送信機から送信されるマルチパスの無線信号を受信して人物の在圏を検知する受信機を制御するコンピュータを、
前記受信機により、第1の間隔で間欠的に受信される前記無線信号の受信レベルに基づいて、人物の在圏/不在の状態に変化があったか否かを判定する第1の判定部、
前記第1の判定部で前記無線信号の受信レベルが変化したと判定された場合に、前記受信機により、前記第1の間隔よりも短い第2の間隔で受信される前記無線信号の受信レベルのばらつきに基づいて、人物の在圏/不在を判定する第2の判定部、
として機能させるプログラム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP11863171.2A EP2696332B1 (en) | 2011-04-04 | 2011-04-04 | Presence detection system, presence detection method, and program |
| JP2013508647A JPWO2012137285A1 (ja) | 2011-04-04 | 2011-04-04 | 在圏検知システム、在圏検知方法及びプログラム |
| PCT/JP2011/058528 WO2012137285A1 (ja) | 2011-04-04 | 2011-04-04 | 在圏検知システム、在圏検知方法及びプログラム |
| CN201180069819.8A CN103460263B (zh) | 2011-04-04 | 2011-04-04 | 在室探测系统、在室探测方法 |
| US14/009,343 US9383438B2 (en) | 2011-04-04 | 2011-04-04 | Presence detection system, presence detection method, and program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2011/058528 WO2012137285A1 (ja) | 2011-04-04 | 2011-04-04 | 在圏検知システム、在圏検知方法及びプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2012137285A1 true WO2012137285A1 (ja) | 2012-10-11 |
Family
ID=46968726
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2011/058528 WO2012137285A1 (ja) | 2011-04-04 | 2011-04-04 | 在圏検知システム、在圏検知方法及びプログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9383438B2 (ja) |
| EP (1) | EP2696332B1 (ja) |
| JP (1) | JPWO2012137285A1 (ja) |
| CN (1) | CN103460263B (ja) |
| WO (1) | WO2012137285A1 (ja) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015025527A1 (ja) * | 2013-08-23 | 2015-02-26 | パナソニックIpマネジメント株式会社 | 車両用物体検知装置 |
| JP2015144796A (ja) * | 2014-02-03 | 2015-08-13 | 株式会社ギガテック | マイクロ波ドップラセンサによる人体検出及び生体モニタ方法 |
| WO2016103394A1 (ja) * | 2014-12-25 | 2016-06-30 | 三菱電機株式会社 | 状態検知システム、空調制御システム、及び、状態検知方法 |
| WO2016157779A1 (ja) * | 2015-03-27 | 2016-10-06 | 株式会社デンソー | 対象物検出装置 |
| WO2017013760A1 (ja) * | 2015-07-22 | 2017-01-26 | 三菱電機株式会社 | 無線通信装置、存在検知システム、方法、及びプログラム |
| JP2019507999A (ja) * | 2016-02-04 | 2019-03-22 | エアリアル テクノロジーズ インコーポレイテッド | 無線通信信号の環境を検知するためのシステムおよび方法 |
| JP2019510960A (ja) * | 2016-01-05 | 2019-04-18 | ロシックス・インコーポレイテッド | 無線周波数信号及びセンサを使用して環境を監視するためのシステム及び方法 |
| JP2019090548A (ja) * | 2017-11-13 | 2019-06-13 | 三菱電機株式会社 | 空調制御システム、遠隔制御装置及び空調制御方法 |
| JP2020511654A (ja) * | 2017-03-16 | 2020-04-16 | コグニティヴ システムズ コーポレイション | 動き検出のためのモデムパラメータの記憶 |
| JP2021501308A (ja) * | 2017-10-31 | 2021-01-14 | コグニティヴ システムズ コーポレイション | ワイヤレス信号の統計パラメータのグルーピングに基づく動き検出 |
| JP2022028703A (ja) * | 2016-04-14 | 2022-02-16 | オリジン ワイヤレス, インコーポレイテッド | 物体追跡のための方法、装置、サーバ及びシステム |
| WO2023286489A1 (ja) * | 2021-07-16 | 2023-01-19 | ソニーセミコンダクタソリューションズ株式会社 | 通信処理装置、通信システム、及び通信処理方法 |
Families Citing this family (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10361585B2 (en) | 2014-01-27 | 2019-07-23 | Ivani, LLC | Systems and methods to allow for a smart device |
| DE102014208386A1 (de) * | 2014-05-06 | 2015-11-12 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Überwachen eines immobilen Raumbereichs |
| FR3031194B1 (fr) * | 2014-12-29 | 2018-04-06 | Centre National De La Recherche Scientifique | Procede et dispositif de detection et de localisation en interieur de personnes ou d’objets |
| US10028220B2 (en) | 2015-01-27 | 2018-07-17 | Locix, Inc. | Systems and methods for providing wireless asymmetric network architectures of wireless devices with power management features |
| KR102314833B1 (ko) * | 2015-03-26 | 2021-10-19 | 한국전자통신연구원 | 공간 전자파를 이용한 물체 감지 장치 및 방법 |
| US9474042B1 (en) | 2015-09-16 | 2016-10-18 | Ivani, LLC | Detecting location within a network |
| US10382893B1 (en) | 2015-09-16 | 2019-08-13 | Ivani, LLC | Building system control utilizing building occupancy |
| US10665284B2 (en) | 2015-09-16 | 2020-05-26 | Ivani, LLC | Detecting location within a network |
| US10455357B2 (en) | 2015-09-16 | 2019-10-22 | Ivani, LLC | Detecting location within a network |
| US11350238B2 (en) | 2015-09-16 | 2022-05-31 | Ivani, LLC | Systems and methods for detecting the presence of a user at a computer |
| US11533584B2 (en) | 2015-09-16 | 2022-12-20 | Ivani, LLC | Blockchain systems and methods for confirming presence |
| US10321270B2 (en) | 2015-09-16 | 2019-06-11 | Ivani, LLC | Reverse-beacon indoor positioning system using existing detection fields |
| US11030902B2 (en) | 2016-01-05 | 2021-06-08 | Locix, Inc. | Systems and methods for using radio frequency signals and sensors to monitor environments |
| US10504364B2 (en) | 2016-01-05 | 2019-12-10 | Locix, Inc. | Systems and methods for using radio frequency signals and sensors to monitor environments |
| US9523760B1 (en) | 2016-04-15 | 2016-12-20 | Cognitive Systems Corp. | Detecting motion based on repeated wireless transmissions |
| US9584974B1 (en) | 2016-05-11 | 2017-02-28 | Cognitive Systems Corp. | Detecting motion based on reference signal transmissions |
| US10129853B2 (en) | 2016-06-08 | 2018-11-13 | Cognitive Systems Corp. | Operating a motion detection channel in a wireless communication network |
| US10455350B2 (en) | 2016-07-10 | 2019-10-22 | ZaiNar, Inc. | Method and system for radiolocation asset tracking via a mesh network |
| US9524628B1 (en) | 2016-08-04 | 2016-12-20 | Cognitive Systems Corp. | Detecting signal modulation for motion detection |
| US9989622B1 (en) | 2017-03-16 | 2018-06-05 | Cognitive Systems Corp. | Controlling radio states for motion detection |
| US10111228B2 (en) | 2017-03-16 | 2018-10-23 | Cognitive Systems Corp. | Selecting wireless communication channels based on signal quality metrics |
| US9927519B1 (en) | 2017-03-16 | 2018-03-27 | Cognitive Systems Corp. | Categorizing motion detected using wireless signals |
| US10380870B2 (en) * | 2017-05-05 | 2019-08-13 | Hubbell Incorporated | Device and method for controlling Bluetooth™ enabled occupancy sensors |
| DE102017109935A1 (de) | 2017-05-09 | 2018-11-15 | Miele & Cie. Kg | Verfahren zum Betreiben eines Haushaltsgeräts |
| US10056129B1 (en) | 2017-08-10 | 2018-08-21 | Micron Technology, Inc. | Cell bottom node reset in a memory array |
| US10051414B1 (en) | 2017-08-30 | 2018-08-14 | Cognitive Systems Corp. | Detecting motion based on decompositions of channel response variations |
| US10109167B1 (en) | 2017-10-20 | 2018-10-23 | Cognitive Systems Corp. | Motion localization in a wireless mesh network based on motion indicator values |
| US10228439B1 (en) | 2017-10-31 | 2019-03-12 | Cognitive Systems Corp. | Motion detection based on filtered statistical parameters of wireless signals |
| US9933517B1 (en) * | 2017-11-03 | 2018-04-03 | Cognitive Systems Corp. | Time-alignment of motion detection signals using buffers |
| US10109168B1 (en) | 2017-11-16 | 2018-10-23 | Cognitive Systems Corp. | Motion localization based on channel response characteristics |
| US10108903B1 (en) * | 2017-12-08 | 2018-10-23 | Cognitive Systems Corp. | Motion detection based on machine learning of wireless signal properties |
| US11057862B2 (en) | 2018-08-26 | 2021-07-06 | Celeno Communications (Israel) Ltd. | Wi-Fi radar detection using synchronized wireless access point |
| US11105912B2 (en) | 2018-12-31 | 2021-08-31 | Celeno Communications (Israel) Ltd. | Coherent Wi-Fi radar using wireless access point |
| US11102750B2 (en) | 2019-01-01 | 2021-08-24 | Celeno Communications (Israel) Ltd. | Positioning system based on distributed transmission and reception of Wi-Fi signals |
| BE1027136B1 (nl) * | 2019-03-21 | 2020-10-19 | Rombit Nv | Methode, systeem en computerprogrammaproduct voor het bepalen van een positie ten opzichte van een begrensde ruimte |
| RU2726012C1 (ru) * | 2019-07-01 | 2020-07-08 | Российская Федерация, от имени которой выступает Государственная корпорация по атомной энергии "Росатом" (Госкорпорация "Росатом") | Радиолучевое устройство с объемной зоной обнаружения для периметров и помещений |
| US11570712B2 (en) | 2019-10-31 | 2023-01-31 | Cognitive Systems Corp. | Varying a rate of eliciting MIMO transmissions from wireless communication devices |
| WO2021081635A1 (en) | 2019-10-31 | 2021-05-06 | Cognitive Systems Corp. | Using mimo training fields for motion detection |
| EP4052066A4 (en) | 2019-10-31 | 2022-12-14 | Cognitive Systems Corp. | TRIGGERING MIMO TRANSMISSIONS FROM WIRELESS COMMUNICATION DEVICES |
| US11385344B2 (en) * | 2020-03-20 | 2022-07-12 | Aptiv Technologies Limited | Frequency-modulated continuous-wave (FMCW) radar-based detection of living objects |
| US11070399B1 (en) | 2020-11-30 | 2021-07-20 | Cognitive Systems Corp. | Filtering channel responses for motion detection |
| US20240063927A1 (en) * | 2021-01-05 | 2024-02-22 | Lg Electronics Inc. | Method and apparatus for performing wireless sensing by collecting empty data on basis of wireless sensing |
| CN117501703A (zh) | 2021-09-01 | 2024-02-02 | 三星电子株式会社 | 显示装置及其控制方法 |
| US20250085388A1 (en) * | 2023-09-11 | 2025-03-13 | Amazon Technologies, Inc. | Integrated radar in wireless local area network (wlan) radio for presence detection |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0879840A (ja) * | 1994-08-31 | 1996-03-22 | Sharp Corp | ホームコントロールシステム |
| JPH1020925A (ja) * | 1996-07-05 | 1998-01-23 | Toshiba Corp | プラント診断装置 |
| JP2003230174A (ja) * | 2003-02-14 | 2003-08-15 | Nippon Telegr & Teleph Corp <Ntt> | 位置検出方法 |
| JP2006221213A (ja) | 2005-02-08 | 2006-08-24 | Masahiro Nishi | 人物在圏検知システム |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS50142057A (ja) * | 1974-05-01 | 1975-11-15 | ||
| JPS63181587A (ja) | 1987-01-23 | 1988-07-26 | Toshiba Corp | 侵入監視装置 |
| JP3001730B2 (ja) | 1992-09-22 | 2000-01-24 | 九州電力株式会社 | 移動体検出方法および装置 |
| JP3469956B2 (ja) | 1995-03-27 | 2003-11-25 | マスプロ電工株式会社 | 万引防止装置 |
| JP3337872B2 (ja) | 1995-06-13 | 2002-10-28 | セイコープレシジョン株式会社 | 物体検知装置 |
| FR2745093B1 (fr) * | 1996-02-21 | 1998-04-24 | Legrand Sa | Procede et dispositif de detection de presence d'un etre vivant d'espece particuliere dans un espace surveille par un capteur doppler |
| US5969595A (en) * | 1996-07-22 | 1999-10-19 | Trimble Navigation Limited | Security for transport vehicles and cargo |
| US6239736B1 (en) * | 1999-04-21 | 2001-05-29 | Interlogix, Inc. | Range-gated radar motion detector |
| JP4513154B2 (ja) * | 2000-02-14 | 2010-07-28 | ソニー株式会社 | 受信回路及びそれを用いたセキュリティシステム |
| US6281797B1 (en) * | 2000-04-04 | 2001-08-28 | Marconi Data Systems Inc. | Method and apparatus for detecting a container proximate to a transportation vessel hold |
| US6437702B1 (en) * | 2000-04-14 | 2002-08-20 | Qualcomm, Inc. | Cargo sensing system and method |
| EP1239421B1 (fr) * | 2001-03-08 | 2008-10-15 | EM Microelectronic-Marin SA | Système de détection de passage d'individus ou d'objets par une entrée-sortie à un espace délimité |
| US20030210139A1 (en) * | 2001-12-03 | 2003-11-13 | Stephen Brooks | Method and system for improved security |
| US7088236B2 (en) * | 2002-06-26 | 2006-08-08 | It University Of Copenhagen | Method of and a system for surveillance of an environment utilising electromagnetic waves |
| US20050055568A1 (en) * | 2003-08-12 | 2005-03-10 | Agrawala Ashok K. | Method and system for providing physical security in an area of interest |
| US7019683B2 (en) * | 2004-03-05 | 2006-03-28 | General Electric Company | Shipping container security system |
| JP4301080B2 (ja) * | 2004-05-24 | 2009-07-22 | 船井電機株式会社 | 監視システム |
| CN100440264C (zh) * | 2005-11-30 | 2008-12-03 | 中国科学院声学研究所 | 一种超声波入侵探测方法和探测装置 |
| US8750971B2 (en) * | 2007-05-24 | 2014-06-10 | Bao Tran | Wireless stroke monitoring |
| US8525725B2 (en) * | 2010-03-09 | 2013-09-03 | Lockheed Martin Corporation | Method and system for position and track determination |
| JP2011215031A (ja) * | 2010-03-31 | 2011-10-27 | Toshiba Corp | 人感センサおよび空調装置 |
| US8816895B2 (en) * | 2011-04-15 | 2014-08-26 | Raytheon Company | Target-tracking radar classifier with glint detection and method for target classification using measured target epsilon and target glint information |
-
2011
- 2011-04-04 CN CN201180069819.8A patent/CN103460263B/zh active Active
- 2011-04-04 JP JP2013508647A patent/JPWO2012137285A1/ja active Pending
- 2011-04-04 WO PCT/JP2011/058528 patent/WO2012137285A1/ja active Application Filing
- 2011-04-04 US US14/009,343 patent/US9383438B2/en active Active
- 2011-04-04 EP EP11863171.2A patent/EP2696332B1/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0879840A (ja) * | 1994-08-31 | 1996-03-22 | Sharp Corp | ホームコントロールシステム |
| JPH1020925A (ja) * | 1996-07-05 | 1998-01-23 | Toshiba Corp | プラント診断装置 |
| JP2003230174A (ja) * | 2003-02-14 | 2003-08-15 | Nippon Telegr & Teleph Corp <Ntt> | 位置検出方法 |
| JP2006221213A (ja) | 2005-02-08 | 2006-08-24 | Masahiro Nishi | 人物在圏検知システム |
Cited By (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015040837A (ja) * | 2013-08-23 | 2015-03-02 | パナソニックIpマネジメント株式会社 | 車両用物体検知装置 |
| CN105474038A (zh) * | 2013-08-23 | 2016-04-06 | 松下知识产权经营株式会社 | 车辆专用的对象检测设备 |
| WO2015025527A1 (ja) * | 2013-08-23 | 2015-02-26 | パナソニックIpマネジメント株式会社 | 車両用物体検知装置 |
| JP2015144796A (ja) * | 2014-02-03 | 2015-08-13 | 株式会社ギガテック | マイクロ波ドップラセンサによる人体検出及び生体モニタ方法 |
| WO2016103394A1 (ja) * | 2014-12-25 | 2016-06-30 | 三菱電機株式会社 | 状態検知システム、空調制御システム、及び、状態検知方法 |
| JPWO2016103394A1 (ja) * | 2014-12-25 | 2017-06-15 | 三菱電機株式会社 | 状態検知システム、空調制御システム、及び、状態検知方法 |
| US10677904B2 (en) | 2015-03-27 | 2020-06-09 | Denso Corporation | Object detection apparatus |
| WO2016157779A1 (ja) * | 2015-03-27 | 2016-10-06 | 株式会社デンソー | 対象物検出装置 |
| JP2016186456A (ja) * | 2015-03-27 | 2016-10-27 | 株式会社日本自動車部品総合研究所 | 対象物検出装置 |
| WO2017013760A1 (ja) * | 2015-07-22 | 2017-01-26 | 三菱電機株式会社 | 無線通信装置、存在検知システム、方法、及びプログラム |
| JPWO2017013760A1 (ja) * | 2015-07-22 | 2017-11-02 | 三菱電機株式会社 | 無線通信装置、存在検知システム、方法、及びプログラム |
| JP2019510960A (ja) * | 2016-01-05 | 2019-04-18 | ロシックス・インコーポレイテッド | 無線周波数信号及びセンサを使用して環境を監視するためのシステム及び方法 |
| JP2019507999A (ja) * | 2016-02-04 | 2019-03-22 | エアリアル テクノロジーズ インコーポレイテッド | 無線通信信号の環境を検知するためのシステムおよび方法 |
| JP2022028703A (ja) * | 2016-04-14 | 2022-02-16 | オリジン ワイヤレス, インコーポレイテッド | 物体追跡のための方法、装置、サーバ及びシステム |
| JP7365593B2 (ja) | 2016-04-14 | 2023-10-20 | オリジン ワイヤレス, インコーポレイテッド | 物体追跡のための方法、装置、サーバ及びシステム |
| JP2020511654A (ja) * | 2017-03-16 | 2020-04-16 | コグニティヴ システムズ コーポレイション | 動き検出のためのモデムパラメータの記憶 |
| JP7003146B2 (ja) | 2017-03-16 | 2022-01-20 | コグニティヴ システムズ コーポレイション | 動き検出のためのモデムパラメータの記憶 |
| JP2021501308A (ja) * | 2017-10-31 | 2021-01-14 | コグニティヴ システムズ コーポレイション | ワイヤレス信号の統計パラメータのグルーピングに基づく動き検出 |
| JP7249337B2 (ja) | 2017-10-31 | 2023-03-30 | コグニティヴ システムズ コーポレイション | ワイヤレス信号の統計パラメータのグルーピングに基づく動き検出 |
| JP2019090548A (ja) * | 2017-11-13 | 2019-06-13 | 三菱電機株式会社 | 空調制御システム、遠隔制御装置及び空調制御方法 |
| WO2023286489A1 (ja) * | 2021-07-16 | 2023-01-19 | ソニーセミコンダクタソリューションズ株式会社 | 通信処理装置、通信システム、及び通信処理方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US9383438B2 (en) | 2016-07-05 |
| EP2696332A1 (en) | 2014-02-12 |
| EP2696332B1 (en) | 2020-05-06 |
| EP2696332A4 (en) | 2014-09-17 |
| US20140015706A1 (en) | 2014-01-16 |
| CN103460263B (zh) | 2015-12-09 |
| CN103460263A (zh) | 2013-12-18 |
| JPWO2012137285A1 (ja) | 2014-07-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2012137285A1 (ja) | 在圏検知システム、在圏検知方法及びプログラム | |
| WO2018216088A1 (ja) | 人位置検知装置、人位置検知システム、人位置検知方法及びプログラム | |
| KR100850445B1 (ko) | 전송 전력 제어를 갖는 무선 시스템 | |
| US9952569B2 (en) | Association of a portable sensor device in a building management system | |
| US10156852B2 (en) | Systems and methods for using radio frequency signals and sensors to monitor environments | |
| US9282520B2 (en) | System and method for adaptive network technique using isochronous transmission | |
| KR20160014538A (ko) | 최적화된 블루투스 저 에너지 통신들에 대한 방법 및 시스템 | |
| US11297592B2 (en) | Electronic beacon for a localization system | |
| US8552838B2 (en) | Passive wireless system | |
| JP6355761B2 (ja) | 状態検知システム、空調制御システム、及び、状態検知方法 | |
| JP6342077B2 (ja) | 無線通信装置、存在検知システム、方法、及びプログラム | |
| CN103363625B (zh) | 一种带多普勒微波传感器的智能遥控器 | |
| JP6925241B2 (ja) | 空調制御システム、遠隔制御装置及び空調制御方法 | |
| EP2511785B1 (en) | Devices, methods, and systems for occupancy detection | |
| US12114240B2 (en) | Allocating different tasks to a plurality of presence sensor systems | |
| KR20110020677A (ko) | 다중 안테나를 이용한 무선 주차 검지 장치 및 그 검지 방법 | |
| JP4572305B2 (ja) | 人物在圏検知システム | |
| JPWO2020012743A1 (ja) | 受信装置、および、受信装置の制御方法 | |
| US20230232252A1 (en) | Configuration module for configuring a network device of a radiofrequency sensing network | |
| RU2829160C1 (ru) | Электрический обогреватель с wi-fi управлением |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 11863171 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2013508647 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14009343 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2011863171 Country of ref document: EP |