WO2012117788A1 - 送信装置、受信装置、通信システム、通信方法、および集積回路 - Google Patents
送信装置、受信装置、通信システム、通信方法、および集積回路 Download PDFInfo
- Publication number
- WO2012117788A1 WO2012117788A1 PCT/JP2012/051923 JP2012051923W WO2012117788A1 WO 2012117788 A1 WO2012117788 A1 WO 2012117788A1 JP 2012051923 W JP2012051923 W JP 2012051923W WO 2012117788 A1 WO2012117788 A1 WO 2012117788A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- signal
- unit
- demodulation reference
- reference signal
- dmrs
- Prior art date
Links
Images












Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B7/00—Radio transmission systems, i.e. using radiation field
- H04B7/02—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas
- H04B7/04—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas
- H04B7/0413—MIMO systems
- H04B7/0456—Selection of precoding matrices or codebooks, e.g. using matrices antenna weighting
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B7/00—Radio transmission systems, i.e. using radiation field
- H04B7/02—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas
- H04B7/04—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas
- H04B7/0413—MIMO systems
- H04B7/0452—Multi-user MIMO systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L25/00—Baseband systems
- H04L25/02—Details ; arrangements for supplying electrical power along data transmission lines
- H04L25/0202—Channel estimation
- H04L25/0204—Channel estimation of multiple channels
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L25/00—Baseband systems
- H04L25/02—Details ; arrangements for supplying electrical power along data transmission lines
- H04L25/0202—Channel estimation
- H04L25/0224—Channel estimation using sounding signals
- H04L25/0226—Channel estimation using sounding signals sounding signals per se
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L25/00—Baseband systems
- H04L25/02—Details ; arrangements for supplying electrical power along data transmission lines
- H04L25/0202—Channel estimation
- H04L25/024—Channel estimation channel estimation algorithms
- H04L25/0242—Channel estimation channel estimation algorithms using matrix methods
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L25/00—Baseband systems
- H04L25/02—Details ; arrangements for supplying electrical power along data transmission lines
- H04L25/06—Dc level restoring means; Bias distortion correction ; Decision circuits providing symbol by symbol detection
- H04L25/067—Dc level restoring means; Bias distortion correction ; Decision circuits providing symbol by symbol detection providing soft decisions, i.e. decisions together with an estimate of reliability
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L5/00—Arrangements affording multiple use of the transmission path
- H04L5/003—Arrangements for allocating sub-channels of the transmission path
- H04L5/0048—Allocation of pilot signals, i.e. of signals known to the receiver
- H04L5/005—Allocation of pilot signals, i.e. of signals known to the receiver of common pilots, i.e. pilots destined for multiple users or terminals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B7/00—Radio transmission systems, i.e. using radiation field
- H04B7/02—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas
- H04B7/04—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas
- H04B7/0413—MIMO systems
- H04B7/0456—Selection of precoding matrices or codebooks, e.g. using matrices antenna weighting
- H04B7/046—Selection of precoding matrices or codebooks, e.g. using matrices antenna weighting taking physical layer constraints into account
- H04B7/0465—Selection of precoding matrices or codebooks, e.g. using matrices antenna weighting taking physical layer constraints into account taking power constraints at power amplifier or emission constraints, e.g. constant modulus, into account
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04J—MULTIPLEX COMMUNICATION
- H04J11/00—Orthogonal multiplex systems, e.g. using WALSH codes
- H04J11/0023—Interference mitigation or co-ordination
- H04J11/0026—Interference mitigation or co-ordination of multi-user interference
- H04J11/003—Interference mitigation or co-ordination of multi-user interference at the transmitter
Definitions
- the present invention relates to a transmission device, a reception device, a communication system, a communication method, and an integrated circuit.
- MIMO Multi-Input Multi-Output
- ⁇ LP MU-MIMO> In MIMO, a terminal different from Single-User MIMO (SU-MIMO) in which a base station device (Base Station: BS) transmits a plurality of signals to one terminal device (Mobile Station: MS) at the same time and the same frequency. There is Multi-User MIMO (MU-MIMO) that transmits signals to devices at the same time and the same frequency.
- SU-MIMO Single-User MIMO
- MS Mobile Station: MS
- MU-MIMO Multi-User MIMO
- Non-Patent Document 1 LTE (Long Term Evolution) and LTE-Advanced, downlink (DL) MU-MIMO using linear precoding (LP) has already been specified (see Non-Patent Document 1 below).
- LTE Long Term Evolution
- DL downlink
- LP linear precoding
- ⁇ NLP MU-MIMO> a base station device multiplies a linear filter so that transmission signals are orthogonalized and interference between terminal devices (Multi-User Interference: MUI) is reduced.
- MUI Multi-User Interference
- Nonlinear Precoding (NLP) MU-MIMO has been proposed as another method for realizing spatial multiplexing.
- the terminal device receives signals in an in-phase component (I-ch) and quadrature component (Quadrature channel: Q-ch) directions in an integral multiple of a constant width (Modulo width).
- I-ch in-phase component
- Q-ch quadrature channel
- a modulo operation is performed in which the points that are translated in parallel are regarded as the same point.
- the base station apparatus can add a signal (perturbation vector) that is an integer multiple of the modulo width to the modulation signal, appropriately select the perturbation vector, add it to the signal addressed to each terminal apparatus, and increase the transmission power.
- VP MU-MIMO When the terminal apparatus performs a modulo operation on the received signal, the base station apparatus has a degree of freedom to add a signal having an arbitrary integral multiple of the modulo width to each modulated signal. This signal that can be added is called a perturbation vector.
- a VP (Vector Perturbation) MU-MIMO method is a method in which all perturbation vectors that improve the power efficiency are searched in consideration of the propagation path states of all the terminal devices that are spatially multiplexed.
- VP MU-MIMO is an NLP MU-MIMO system that can obtain a full transmission diversity gain and exhibits very good characteristics although the amount of computation of the base station apparatus is large (see Non-Patent Document 2 below).
- THP Tomlinson-Harashima precoding
- MU-MIMO is a method for calculating a perturbation vector to be sequentially added to a signal addressed to each terminal device in consideration of inter-user interference received by each terminal device. Call.
- THP MU-MIMO has low complexity of the transmission processing of the base station apparatus, full transmission diversity cannot be obtained in all terminal apparatuses (see Non-Patent Document 3 below).
- LR-THP is a method capable of obtaining full transmission diversity gain with a smaller amount of computation than VP MU-MIMO by adding processing called lattice reduction (LR) to THP MU-MIMO ( Non-patent document 3 below).
- DMRS Demodulation Reference Signal
- DMRS is a signal for the base station apparatus to notify each terminal apparatus in advance of the amplitude and phase of the data signal precoded by NLP MU-MIMO.
- the base station apparatus adds a perturbation vector to the DMRS (or performs a modulo operation) and transmits the DMRS. Therefore, the terminal apparatus also performs a modulo operation on the DMRS. There is a need. Therefore, the terminal device needs to know in advance the modulo width necessary for the modulo calculation. Since the modulo width is proportional to the amplitude of the modulation signal in the reception signal, the terminal device needs to know the reception gain (complex gain of the propagation path) of the data signal after nonlinear precoding.
- the terminal apparatus cannot know the reception gain (complex gain of the propagation path) without performing propagation path estimation using DMRS. That is, the terminal apparatus is in a state that “a reception gain (complex gain of a propagation path) cannot be obtained unless a propagation path is estimated from DMRS, but a DMRS cannot be estimated without knowing the reception gain”. Therefore, the above problem occurs.
- each terminal apparatus is configured with orthogonal radio resources (areas divided in the time direction and the frequency direction and do not interfere with each other even if different data signals and reference signals are allocated).
- Send DMRS since the terminal device does not need to perform a modulo operation on the DMRS, a reception gain can be obtained.
- Patent Document 1 the method of arranging DMRSs addressed to each terminal device in orthogonal radio resources requires as many DMRS dedicated radio resources as the number of terminal devices. There was a problem that the increase became large.
- the present invention has been made in view of such circumstances, and in the NLP MU-MIMO system, the DMRS is spatially multiplexed and the increase in overhead due to DMRS insertion is minimized, while the data signal amplitude and
- An object is to provide a technique capable of estimating a phase (complex gain / reception gain).
- a transmitting device that transmits data signals to a plurality of receiving devices at the same time and the same frequency, the demodulation reference signal addressed to the first receiving device, and the first
- a transmission device comprising: a transmission unit that transmits a demodulation reference signal addressed to a second reception device different from the reception device at the same time and the same frequency.
- the spatially multiplexed demodulation reference signal can transmit the demodulation reference signal to all the mobile station devices with one radio resource, so that sufficient radio resources are allocated to arrange data signals.
- a plurality of demodulation reference signals can be transmitted to all mobile station apparatuses.
- Each mobile station apparatus (the following receiving apparatus) can estimate a propagation path using a plurality of demodulation reference signals. Therefore, if the present invention is used, the insertion loss of the demodulation reference signal can be greatly reduced.
- non-linear precoding unit that adds a signal that is an integral multiple of a predetermined signal to the demodulation reference signal. Further, a non-linear precoding unit that performs non-linear precoding on the demodulation reference signal may be provided.
- the transmission unit transmits a plurality of data signals at the same time and the same frequency
- the nonlinear precoding unit performs the same nonlinear precoding processing as the data signal on the demodulation reference signal.
- nonlinear precoding can be performed on the same principle using the same filter as the data signal.
- a DMRS correction unit that corrects the demodulation reference signal.
- the DMRS correction unit preferably includes a two-dimensional Euclidean algorithm unit that applies a two-dimensional Euclidean algorithm to the demodulation reference signal.
- the two-dimensional Euclidean algorithm section includes a signal obtained by rotating the phase of the second demodulation reference signal and the second demodulation reference signal by 90 degrees from the first demodulation reference signal, The signal obtained by rotating the phase of the demodulation reference signal by 180 degrees and the signal obtained by rotating the phase of the second demodulation reference signal by 270 degrees may be subtracted to have a difference vector calculation unit.
- the present invention is a receiving device characterized by having a perturbation vector addition unit for adding a signal of an integral multiple of a predetermined width to a demodulation reference signal. It is preferable to have a provisional channel estimation unit that estimates a channel using a demodulation reference signal obtained by adding the signals.
- a perturbation vector candidate selection unit that selects a plurality of different signals, and a perturbation vector estimation that selects one of the signals based on a channel estimation result obtained by channel estimation using the temporary channel estimation unit using each of the signals. It is good to have a part.
- a demodulator that softly estimates a data signal based on each of the propagation path estimation results corresponding to a plurality of different signals and calculates a log likelihood ratio, respectively, and a variance of each log likelihood ratio It is preferable that a perturbation vector evaluation value calculation unit to calculate is selected, and the perturbation vector estimation unit selects the signal corresponding to the largest of the variances. It is preferable that a two-dimensional Euclidean algorithm for calculating an irreducible vector is provided by applying a two-dimensional Euclidean algorithm to the plurality of demodulation reference signals. It is preferable to have a complex gain calculation unit that calculates a complex gain of the propagation path using the irreducible vector.
- the present invention also provides a nonlinear precoding unit that adds a signal that is an integer multiple of a predetermined signal to a demodulation reference signal, and the demodulation reference signal and other signals at the same time and the same frequency.
- a communication system comprising: a transmitter having a transmitter for transmitting; and a receiver having a perturbation vector adder for adding a signal having an integer multiple of a predetermined width to a demodulation reference signal. is there.
- the present invention also includes a step of adding a signal that is an integral multiple of a predetermined signal to the demodulation reference signal, and a step of transmitting the demodulation reference signal and another signal at the same time and the same frequency.
- a reception method including a step of adding a signal having an integer multiple of a predetermined width to a demodulation reference signal.
- the present invention also provides a nonlinear precoding unit that adds a signal that is an integer multiple of a predetermined signal to a demodulation reference signal, and the demodulation reference signal and other signals at the same time and the same frequency.
- An integrated circuit having a transmitting step.
- the present invention is an integrated circuit characterized by having a perturbation vector addition unit for adding a signal having an integer multiple of a predetermined width to a demodulation reference signal.
- the present invention may be a program for causing a content to execute the communication method described above, or a computer-readable recording medium for recording the program.
- FIG. 1 is a conceptual diagram showing a configuration example of a communication system 1 according to the first embodiment of the present invention.
- the base station apparatus A1 transmits a common reference signal (Common Reference Signal: CRS).
- CRS is a signal in which the base station apparatus A1 and the first to fourth terminal apparatuses B11 to B14 store their reference signals in advance.
- Each of the first to fourth terminal apparatuses B11 to B14 estimates the propagation path state based on the CRS transmitted by the base station apparatus A1, and transmits the propagation path state information based on the estimated propagation path state. Notify A1.
- the base station apparatus A1 transmits DMRS and data signals to the first to fourth terminal apparatuses B11 to B14.
- base station apparatus A1 performs precoding on the DMRS and data signal, and transmits the multiplied DMRS and data signal.
- the multiplexed first to fourth terminal apparatuses B11 to B14 are based on the DMRS received from the base station apparatus A1, and the equivalent propagation path (hereinafter simply referred to as equivalent propagation) in which the precoding process is regarded as a part of the propagation path. And a data signal is obtained based on equivalent channel state information indicating the channel state of the estimated equivalent channel.
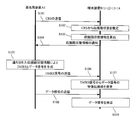
- FIG. 2 is a sequence diagram showing an example of the operation of the communication system 1 according to the present embodiment. This figure is a diagram showing an example of the operation of the communication system 1 in the case of FIG.
- Step S101 The base station apparatus A1 transmits the CRS to the first to fourth terminal apparatuses B11 to B14. Thereafter, the process proceeds to step S102.
- Step S102 The first to fourth terminal apparatuses B11 to B14 estimate the propagation path state based on the CRS transmitted in step S101. Thereafter, the process proceeds to step S103.
- Step S103 The first to fourth terminal apparatuses B11 to B14 calculate channel state information based on the channel state estimated in step S102. Thereafter, the process proceeds to step S104.
- Step S104 The first to fourth terminal apparatuses B11 to B14 notify the base station apparatus A1 of the propagation path state information calculated in step S103. Thereafter, the process proceeds to step S105.
- Step S105 Base station apparatus A1 calculates the filter used for nonlinear precoding based on the propagation path state information notified by step S104.
- the base station apparatus A1 performs nonlinear precoding on the generated DMRS and data signal using the filter, and generates the DMRS and data signal. Thereafter, the process proceeds to step S106.
- Step S106 The base station apparatus A1 transmits the DMRS signal generated in step S105 to the first to fourth terminal apparatuses B11, B12, B13, and B14. Thereafter, the process proceeds to step S107.
- Step S107 The first to fourth terminal apparatuses B11 to B14 estimate the propagation path state of the equivalent propagation path based on the DMRS signal transmitted in step S106. Thereafter, the process proceeds to step S108.
- Step S108 The base station apparatus A1 transmits the data signal generated in step S105 to the terminal apparatuses B11 to B14. Thereafter, the process proceeds to step S109.
- Step S109 The first to fourth terminal apparatuses B11 to B14 detect and acquire a data signal based on the equivalent channel state information indicating the channel state of the equivalent channel estimated in step S108.
- terminal apparatuses B11 to B14 are multiplexed.
- N first to Nth terminal apparatuses B11 to B1N are multiplexed thereafter.
- the terminal devices B11 to B1N are collectively referred to as a terminal device B1n.
- FIG. 3 is a functional block diagram illustrating a schematic configuration example of the base station apparatus A1 according to the present embodiment.
- the base station apparatus A1 includes first to Nth antennas a101-1 to a101-N, first to Nth receiving units a102-1 to a102-N, first to Nth antennas.
- GI Guard Interval removal units a103-1 to a103-N, first to Nth FFT (Fast Fourier Transform) units a104-1 to a104-N, propagation path state information acquisition units a105, filter calculation unit a11, first to Nth code units a121-1 to a121-N, first to Nth modulation units a122-1 to a122-N, DMRS generation unit a124, eigensignal configuration unit a125, nonlinear precoding unit a13, CRS generation unit a141, frame configuration unit a142, first to Nth I FT (Inverse Fast Fourier Transform) sections a143-1 to a143-N, first to Nth GI insertion sections a144-1 to a144-N, and first to Nth transmission sections a145-1 to a145-N.
- I FT Inverse Fast Fourier Transform
- N 4
- OFDM Orthogonal Frequency Division Multiplexing
- the device A1 may use a time division multiplexing (TDM) method or a frequency division multiplexing (FDM) method in one or both of the uplink and the downlink.
- a signal (carrier frequency signal) is received. This signal includes propagation path state information.
- the first to Nth receivers a102-n downconvert the received signal and perform A / D (analog / digital) conversion to generate a baseband digital signal.
- the first to Nth receiving units a102-n output the generated digital signal to the first to Nth GI removing units a103-n.
- the first to Nth GI removal units a103-n remove the GI from the digital signals input from the first to Nth reception units a102-n, and the removed signals from the first to the Nth To the FFT unit a104-n.
- the first to N-th FFT units a104-n perform frequency-domain signals by performing FFT on the signals input from the first to N-th GI removal units a103-n.
- the first to N-th FFT units a104-n output the generated frequency domain signals to the propagation path state information acquisition unit a105.
- the propagation path state information acquisition unit a105 demodulates signals input from the first to N-th FFT units a104-n, and extracts propagation path state information from the demodulated information.
- the propagation path state information acquisition unit a105 outputs the extracted propagation path state information to the filter calculation unit a11.
- signals other than the signal of the propagation path state information are demodulated by a control unit (not shown).
- control information is used to control the base station apparatus A1, and data other than the control information is transmitted to other base station apparatuses, server apparatuses, and the like.
- the filter calculation unit a11 calculates a filter used for nonlinear precoding based on the propagation path state information input from the propagation path state information acquisition unit a105. Details of the filter calculation processing performed by the filter calculation unit a11 will be described later.
- the filter calculation unit a11 inputs the calculated filter to the nonlinear precoding unit a13.
- the first to N-th code units a121-n perform error correction coding on the input information bits and output the encoded bits to the first to N-th modulation units a122-n.
- the first to Nth modulation units a122-n modulate the encoded bits input from the first to Nth code units a121-n to generate a data signal addressed to the terminal device B1n.
- the first to Nth modulation units a122-n output the generated data signal to the unique signal configuration unit a125.
- the base station apparatus A1 determines modulation schemes to be used in the first to N-th modulation units a122-n based on the propagation path state information, and transmits the modulation information indicating the determined modulation schemes to the modulation units a122-n. To the first to N-th terminal devices B1n from the base station device A1.
- the DMRS generator a124 generates DMRSs addressed to the first to Nth terminal devices B1n.
- the DMRS generation unit a124 outputs the generated DMRS to the specific signal configuration unit a125.
- the unique signal configuration unit a125 receives the data signals addressed to the first to Nth terminal apparatuses B1n input from the first to Nth modulation units 122-n and the first to Nth data signals input from the DMRS generation unit a124.
- the DMRSs addressed to the terminal devices B1n up to the Nth are related.
- Each of the information addressed to the first to Nth terminal apparatuses B1n related by the unique signal configuration unit a125 is referred to as a unique signal of the first to Nth terminal apparatuses B1n.
- the unique signal configuration unit a125 outputs each of the unique signals of the first to Nth terminal apparatuses B1n generated by the association to the nonlinear precoding unit a13.
- the non-linear precoding unit a13 performs non-linear precoding on the eigensignals (data signal and DMRS) of the first to Nth terminal apparatuses B1n input from the eigensignal configuration unit a125. Details of the nonlinear precoding performed by the nonlinear precoding unit a13 will be described later.
- the nonlinear precoding unit a13 outputs the unique signal subjected to the nonlinear precoding to the frame configuration unit a142.
- the CRS generation unit a141 generates a CRS having a known reference signal in the base station apparatus A1 and the first to Nth terminal apparatuses B1n, and outputs the generated CRS to the frame configuration unit a142.
- the frame configuration unit a142 maps the unique signal input from the nonlinear precoding unit a13 and the CRS input from the CRS generation unit a141. Note that the frame configuration unit a142 may map the unique signal and the CRS to different frames, or may map to the same frame. For example, only the CRS may be mapped to a certain frame, and the CRS and unique signal may be mapped to another frame. It is assumed that the base station apparatus A1 maps the CRS and the unique signal to the frame according to a predetermined mapping, and the first to Nth terminal apparatuses B1n know the mapping in advance.
- the frame configuration unit a142 outputs the signal transmitted by the antenna a101-n among the mapped signals to the first to Nth IFFT units a143-n in units of frames.
- the 1st to N-th IFFT units a143-n generate time-domain signals by performing IFFT on the signals input from the frame configuration unit a142.
- the first to Nth IFFT units a143-n output the generated time domain signals to the first to Nth GI insertion units a144-n.
- the first to Nth GI insertion sections a144-n add a guard interval to the signals input from the first to Nth IFFT sections a143-n,
- the data is output to the Nth transmitters a145-n.
- the first to Nth transmitters a145-n D / A convert the signals (baseband digital signals) input from the first to Nth GI inserters a144-n. .
- the first to Nth transmitters a145-n upconvert the converted signal to generate a carrier frequency signal.
- the first to Nth transmitters a145-n transmit the generated signals via the first to Nth antennas a101-n.
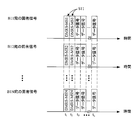
- FIG. 4 is a schematic diagram illustrating an example of the configuration of the unique signal according to the present embodiment.
- the horizontal axis represents time.
- This figure represents the unique signal output by the unique signal configuration unit a125. Further, this figure shows the arrangement of unique signals of the first to Nth terminal apparatuses B1n transmitted at the same frequency, with the time axis aligned.
- DMRSs addressed to the first to Nth terminal apparatuses B1n are represented by “DMRS-MSn”.
- the unique signal is a signal for each of the first to Nth terminal apparatuses B1n and is composed of a DMRS and a data signal.
- the signal with the code S11 indicates DMRS (DMRS-MS1) addressed to the terminal device B11.
- FIG. 4 shows that the DMRSs addressed to the first to Nth terminal apparatuses B1n are all output from the unique signal configuration unit a125 at the same time.
- This figure also shows that data signals addressed to the first to N-th terminal devices B1n are also output from the unique signal configuration unit a125 at the same time.
- both data signals and DMRS assigned at the same time are spatially multiplexed by nonlinear precoding a13, and are transmitted from base station apparatus A1 at the same time and the same frequency (that is, the same subcarrier of the same OFDM symbol).
- Sent by FIG. 4 shows that the DMRS and the data signal are output from the unique signal configuration unit a125 at different times. For example, DMRS addressed to the mobile station B1n The first through N are output to the time t 1 and time t 2, the data signal is output to t 3 ⁇ t L.
- the configuration of the unique signal in FIG. 4 is an example, and the present invention is not limited to this.
- specific signal configuration unit a125 after the DMRS addressed to the mobile station B1n is output (t 3 or later) on it data signal is output, specific signal configuration unit a125 also outputs the DMRS after outputting the data signals Good.
- the unique signal configuration unit a125 may alternately output the data signal and the DMRS on the time axis, or may output in another order.
- FIG. 5A is a schematic diagram showing an example of a frame configuration according to the present embodiment. This figure shows the structure of a frame in which signals are mapped by the frame configuration unit a142. This figure also shows the structure of frames transmitted from the first to N-th antennas a101-n with the time axis aligned.
- the CRS transmitted from the first to Nth antennas a101-n is represented by “CRS-Txn”.
- CRS-Txn the CRS transmitted from the first to Nth antennas a101-n is represented by “CRS-Txn”.
- each of the first to Nth antennas a101-n is composed of a CRS and a unique signal (a unique signal after nonlinear precoding composed of a data signal and DMRS).
- the signal denoted by reference numeral S21 indicates CRS (CRS-Tx1) transmitted by the antenna a101-1.
- a signal denoted by reference sign S22 is a unique signal transmitted by the antenna a 101-1, and indicates a unique signal after nonlinear precoding.
- FIG. 5A shows that CRSs transmitted by antenna a101-n are arranged in different time bands by frame configuration unit a142 and transmitted from base station apparatus A1. For example, CRS sent by the antenna a101-1 is sent to the time t 1, CRS sent by the antenna a101-2 is transmitted to the time t 2.
- FIG. 5A shows that the CRS and the specific signal are arranged in different time bands in the frame configuration unit a142.
- the CRS transmitted by the antenna a101-n is arranged in a time band transmitted from time t 1 to t N
- the unique signal is arranged in a band after t N + 1 .
- This figure also shows that all the unique signals transmitted by the first to Nth antennas a101-n are arranged in the same time band by the frame configuration unit a142.
- the frame configuration in FIG. 5A is an example, and the present invention is not limited to this.
- all CRS transmitted by the antenna a101-n are arranged ahead of time bands (before t N + 1), after the time band (t N + 1 and later) are disposed unique signal
- the frame configuration unit a142 may arrange the unique signal in the previous time band and arrange the CRS in the later time band.
- the frame configuration unit a142 may be arranged in the time band in which the unique signal and the CRS alternate, or may be arranged in another order.
- the frame configuration unit a142 may arrange the CRS transmitted by the antenna a 101-1 in the time band after the time tN + 1 and arrange the unique signal in the time band before the time tN + 1 .
- base station apparatus A1 transmits the frame which has arrange
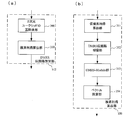
- FIG. 5B and FIG. 5C show a configuration example of a frame transmitted by each of the first to N-th antennas a101-n.
- 4 and 5A show examples in which DMRS and data signals, or CRS and unique signals (DMRS and data signals are included) are arranged in the time direction, but as shown in FIGS. 5B and 5C,
- the CRS, DMRS, and data signal may be arranged on a two-dimensional matrix in the time direction (t) and the frequency direction (f).
- FIG. 6 is a functional block diagram illustrating a configuration example of the terminal device B1n according to the present embodiment.
- the terminal device B1n includes an antenna b101, a receiving unit b102, a GI removing unit b103, an FFT unit b104, a signal separating unit b105, a CRS channel estimating unit b107, a DMRS channel estimating unit b12, and a channel compensating unit.
- b106 a modulo calculation unit b109, a demodulation unit b110, a decoding unit b111, a propagation path state information generation unit b108, an IFFT unit b131, a GI insertion unit b132, and a transmission unit b133.
- the receiving unit b102 receives a signal (carrier frequency signal) transmitted from each terminal device B1n via the antenna b101.
- the receiving unit b102 down-converts the received signal and performs A / D (analog / digital) conversion to generate a baseband digital signal.
- the receiving unit b102 outputs the generated digital signal to the GI removing unit b103.
- the GI removal unit b103 removes the GI from the digital signal input from the reception unit b102, and outputs the signal after the removal to the FFT unit b104.
- the FFT unit b104 generates a frequency domain signal by performing a fast Fourier transform on the signal input from the GI removing unit b103.
- the FFT unit b104 outputs the generated frequency domain signal to the signal separation unit b105.
- the signal separation unit b105 demaps the signal input from the FFT unit b104 based on the mapping information notified from the base station apparatus A1. Of the demapped signals, the signal separator b105 outputs CRS to the CRS channel estimator b107, and outputs DMRS to the DMRS channel estimator b12. The signal separator b105 outputs the data signal to the propagation path compensator b106. Further, the signal separator b105 inputs the data signal to the DMRS propagation path estimator b12.
- the CRS channel estimator b107 estimates the channel state based on the CRS input from the signal separator b105, and outputs information indicating the estimated channel state to the channel state information generator b108.
- the DMRS propagation path estimation unit b12 estimates a propagation path state of an equivalent propagation path in which a filter used for nonlinear precoding is regarded as a part of the propagation path based on the DMRS input from the signal separation unit b105. Details of the DMRS propagation path estimation unit b12 will be described later.
- the DMRS channel estimator b12 outputs equivalent channel state information indicating the estimated channel state of the equivalent channel to the channel compensator b106.
- the propagation path compensation unit b106 performs propagation path compensation on the signal input from the signal separation unit b105 using the equivalent propagation path state information input from the DMRS propagation path estimation unit b12.
- the propagation path compensation unit b106 outputs the signal after propagation path compensation to the modulo calculation unit b109.
- the modulo calculator b109 performs a modulo calculation on the signal input from the propagation path compensator b106 based on the modulation information notified from the base station apparatus A1.
- the modulo operation can be expressed by the following equation.
- Equation (1-1) ⁇ -floor ((Re [ ⁇ ] + ⁇ / 2) / ⁇ ) ⁇ -i ⁇ floor ((Im [ ⁇ ] + ⁇ / 2) / ⁇ ) ⁇ (1-1)
- floor (x) represents a maximum integer not exceeding x
- Re [ ⁇ ] and Im [ ⁇ ] represent a real part and an imaginary part of the complex number ⁇ , respectively.
- i is an imaginary unit.
- ⁇ represents the modulo width.
- ⁇ may be 2 ⁇ 2 times the average amplitude of the QPSK signal, 8 / ⁇ 10 times that of the 16QAM signal if 16QAM, and 16 / ⁇ 42 times that of the 64QAM signal if 64QAM. desirable.
- the modulo width may be another value.
- the modulo calculation unit b109 outputs the signal after the modulo calculation to the demodulation unit b110.
- the demodulator b110 demodulates the signal input from the modulo calculator b109 in the modulation scheme indicated by the modulation information notified from the base station apparatus A1.
- the demodulator b110 outputs the demodulated information (the hard-decided encoded bit or the soft estimated value of the encoded bit) to the decoder b111.
- the decoding unit b111 acquires information bits by decoding the information input from the demodulation unit b110, and outputs the acquired information bits.
- the propagation path state information generation unit b108 generates propagation path state information from the propagation path state input from the CRS propagation path estimation unit b107 (referred to as propagation path state information generation processing).
- h n1 , h n2 ,..., h nN are propagation path states between the antenna a 101-1, the antenna a 101-2,.
- the propagation path state information generation unit b108 does not necessarily need to notify the base station apparatus A1 using the row vector
- may be notified to the base station apparatus A1 as the propagation path state information of the row vector C ⁇ h n /
- Information approximate to a predetermined value may be notified to the base station apparatus A1 as propagation path state information.
- the propagation path state information generation unit b108 modulates the generated propagation path state information and outputs the modulated propagation path state information signal to the IFFT unit b131.
- the IFFT unit b131 generates a time domain signal by performing inverse fast Fourier transform on the signal input from the propagation path state information generation unit b108.
- the IFFT unit b131 outputs the generated time domain signal to the GI insertion unit b132.
- the GI insertion unit b132 adds a guard interval to the signal input from the IFFT unit b131, and outputs the signal after the addition to the transmission unit b133.
- the transmission unit b133 D / A converts the signal (baseband digital signal) input from the GI insertion unit b132.
- the transmitter b133 generates a carrier frequency signal by up-converting the converted signal.
- the transmitter b133 transmits the generated signal via the antenna b101.
- the filter calculation unit a11 illustrated in FIG. 3 configures the propagation path matrix H from the propagation path state information input from the propagation path state information acquisition unit a105.
- H is a matrix of N rows and N columns, and the p row and q column components indicate the complex gain of the propagation path between the p th terminal device B1p and the q th antenna a101-q of the base station device (here, p and q are arbitrary integers from 1 to N).
- the propagation path state acquired from the propagation path state information notified from each terminal apparatus B1p becomes a row vector, and a propagation path matrix H can be generated by generating a matrix having a row vector corresponding to all terminal apparatuses in each line. . Even if the norm of the propagation path state information is normalized in the terminal apparatus B1n, the base station apparatus A1 keeps the propagation path state information notified from the terminal apparatus B1n as it is, that is, the normalized propagation path state in each row. To generate a channel matrix H.
- each unique signal input from the unique signal component a125 is denoted by sn, and a vertical vector having all s1 to sN as components is denoted by s.
- the unique signal indicates a data signal and the DMRS generated by the DMRS generator a124.
- the nonlinear precoding unit a13 searches for a combination of the N-dimensional integer vertical vectors z1 and z2 that minimizes the norm of the transmission signal multiplied by the filter W. This is expressed as follows.
- (Z1, Z2) argmin (z1, z2)
- (Z1, Z2) be a combination of (z1, z2) that minimizes the norm
- L BS an integer: [- L BS, -L BS +1, ..., - 2, -1,0 , 1, 2,..., L BS -1, L BS ]
- z1 ⁇ + iz2 ⁇ is called a perturbation vector.
- the base station apparatus A1 must normalize the total transmission power of data signals in a certain number of subcarriers and a certain number of OFDM symbols (referred to as “power normalization units”) in order to keep the transmission power constant. Don't be.
- the power normalization unit indicates, for example, the entire frame unit shown in FIGS. 5B and 5C.
- the nonlinear precoding unit a13 multiplies the eigensignal x (data signal and DMRS) by the reciprocal of the power normalization coefficient g, and inputs the multiplied data signal to the frame configuration unit a142.
- each component of the signal x indicates a transmission signal transmitted from each of the first to N-th antennas a101-1 to a101-N in order.
- the propagation path estimation unit b12 estimates the propagation path, and the propagation path compensation unit b106 multiplies the amplitude with respect to the data signal by g. Can be compensated. That is, a signal can be correctly detected by multiplying the received data signal by g.
- the nonlinear precoding unit a13 applies the same nonlinear precoding to the DMRS as the data signal, including normalization of power.
- FIG. 7 shows a detailed configuration of the DMRS propagation path estimation unit b12.
- the DMRS propagation channel estimation unit b12 includes a perturbation vector candidate selection unit b121, a perturbation vector addition unit b122, a temporary propagation channel estimation unit b123, a propagation channel compensation unit b124, a modulo operation unit b125, a demodulation unit b126, and a perturbation vector evaluation value calculation unit b127. , And a perturbation vector estimation unit b128.
- the perturbation vector candidate selection unit b121 selects a candidate perturbation vector candidate, and inputs the selected perturbation vector to the perturbation vector addition unit b122.
- a modulo width for DMRS common to the base station apparatus A1 and the terminal apparatus B1n is used.
- L BS L MS
- L BS L MS
- the temporary propagation path estimation unit b123 inputs the amplitude
- the propagation path compensation unit b124 uses the amplitude and phase input from the temporary propagation path estimation unit b123 to perform propagation path compensation on the data signal in the frame in which the DMRS is arranged. That is, the received signal is divided by the complex gain h.
- the data signal after propagation path compensation is input to the modulo arithmetic unit b125.
- Step S25 The modulo operation unit b125 performs a modulo operation on the data signal subjected to the propagation path compensation by the propagation path compensation unit b124.
- a modulo width for data signals common to the base station apparatus A1 and the terminal apparatus B1n is used.
- the modulo operation unit b125 inputs the data signal after the modulo operation to the demodulation unit b126.
- Step S26 The demodulator b126 performs soft estimation on the input data signal after the modulo calculation, and inputs the soft estimation value to the perturbation vector evaluation value calculation unit b127.
- LLR log likelihood ratio
- the demodulator b126 inputs the LLR corresponding to each bit assigned to each data signal to the perturbation vector evaluation value calculator b127 based on the equations (1-4) and (1-5). That is, the number of data signals ⁇ 2 for QPSK and the number of data signals ⁇ 4 for 16QAM are calculated and input to the perturbation vector evaluation value calculation unit b127.
- the perturbation vector evaluation value calculation unit b127 calculates the variance of the input LLR, and inputs the calculated LLR variance and the corresponding LLR to the perturbation vector estimation unit b128.
- the LLR variance is calculated by the following equation.
- V is the number of data signals soft-estimated for each perturbation vector candidate.
- M is the number of bits allocated to each modulation system, and is 2 for QPSK and 4 for 16QAM.
- L v m represents the LLR of the mth bit assigned to the vth data signal.
- Step S28 The perturbation vector estimation unit b128 selects the largest of the LLR variances corresponding to each perturbation vector candidate input from the perturbation vector evaluation value calculation unit b127, and sets the perturbation vector having the maximum variance.
- the amplitude and phase of the corresponding data signal (referred to as “equivalent channel state information”) are output and input to the channel compensator b106 (FIG. 6) outside the DMRS channel estimator b12.
- a large variance of the LLR indicates that the mutual information amount transmitted from the base station apparatus A1 is the largest when each perturbation vector candidate is assumed.
- the LLR has a larger absolute value as the “probability / probability” of whether each bit is 1 or 0 is higher. Therefore, assuming each perturbation vector candidate, by calculating the variance of each LLR and selecting the perturbation vector having the largest LLR variance, the perturbation vector is the perturbation vector having the highest “probability / probability”. It can be estimated that there is.
- the propagation path compensation unit b124, the modulo calculation unit b125, and the demodulation unit b126 in the DMRS propagation path estimation unit b12 are the propagation path compensation unit b106, the modulo calculation unit b109, and the demodulation unit b110 outside the DMRS propagation path estimation unit b12. Therefore, both components may be made a common circuit in order to reduce the circuit scale.
- the soft estimation value corresponding to the perturbation vector estimated by the perturbation vector estimation unit b128 among the soft estimation values once calculated by the demodulation unit b126 is used by the decoding unit b111, so that the soft estimation value is calculated twice. The calculation amount may be reduced by avoiding the above.
- the base station apparatus spatially multiplexes and transmits DMRS using NLP MU-MIMO, so that overhead due to DMRS insertion can be reduced with high power efficiency.
- the data signal that is softly estimated for estimating the perturbation vector may be a data signal that is a part of the frame.
- the perturbation vector may be estimated using an index other than the LLR variance.
- Second Embodiment Two-dimensional Euclidean Mutation Method
- the terminal apparatus B1n estimates the most likely perturbation vector from the perturbation vector candidates.
- DMRS can be spatially multiplexed by NLP MU-MIMO.
- both the base station apparatus A2 according to the present embodiment and the terminal apparatus B2n according to the present embodiment introduce a process called “two-dimensional Euclidean mutual division method”, so that the computation amount of the terminal apparatus B2n is increased. Is reduced as compared with the first embodiment.
- the base station apparatus A2 according to the present embodiment has a DMRS correction unit a226.
- the base station apparatus A1 of the first embodiment except for the operation of the DMRS propagation path estimation unit b22, the base station apparatus A1 of the first embodiment
- the terminal device B1n has the same configuration as the terminal device B1n.
- FIG. 15 shows the configuration of the base station apparatus A2. As described above, a DMRS correction unit a226 is newly added to FIG.
- the DMRS correction unit a226 of the base station apparatus A2 and the DMRS propagation path estimation unit b22 of the terminal apparatus B2n will be described in detail.
- Both the base station apparatus A2 and the terminal apparatus B2n according to the present embodiment have a two-dimensional Euclidean algorithm division unit that performs a process called "two-dimensional Euclidean algorithm". Since the two-dimensional Euclidean algorithm section is one of the characteristic parts of this embodiment, the principle will be described first.
- the 2D Euclidean algorithm is an algorithm that extends the normal Euclidean algorithm to 2D.
- the normal Euclidean algorithm is called a one-dimensional Euclidean algorithm.
- An extension to complex numbers is the two-dimensional Euclidean algorithm.
- the method is to calculate a “base vector (or irreducible vector)” corresponding to the greatest common divisor of both Gaussian integers when there are two complex numbers (Gaussian integers) whose real part and imaginary part are integers. It is.
- a base vector or irreducible vector
- a Gaussian integer having a large norm (absolute value) of 3 + i and -1 + i and a small Gaussian integer multiplied by +1, ⁇ 1, + i, and ⁇ i are added (Gauss integer is multiplied by ⁇ 1, + i, and ⁇ (Multiplying by i corresponds to rotating the phase of a Gaussian integer by +180 degrees, +90 degrees, and +270 degrees, respectively).
- This embodiment is characterized in that DMRS propagation path estimation is performed using the two-dimensional Euclidean mutual division method as described above. The principle of this propagation path estimation will be described. In the present embodiment, it is assumed that the reference DMRS is always one of the points of the QPSK signal.
- FIG. 8 shows an example of the positions of two DMRSs (referred to as DMRS1 and DMRS2) on the signal point plane.
- the base station apparatus transmits DMRS1 at a position of 3 + i and DMRS2 transmits at a position of -1 + i.
- the unit of this signal point plane is set so that the amplitude of the QPSK signal is ⁇ 2. That is, each signal point of QPSK is a point of ( ⁇ 1 ⁇ i), and the modulo width is 4 (for convenience, the unit of amplitude is changed from that of the first embodiment).
- the DMRS1 and DMRS2 and ⁇ other points are all QPSK signal points and points obtained by adding arbitrary perturbation vectors to the QPSK signal points. As shown in FIG. The dots are aligned on the top.
- DMRS1 is a signal obtained by adding the perturbation vector +4 to -1 + i of the QPSK signal.
- the complex number 1 + i of “the greatest common divisor” can be obtained.
- This irreducible vector corresponds to one of the four points of QPSK.
- the irreducible vector is also multiplied by a to be a (1 + i) An irreducible vector can be obtained.
- DMRS1 and DMRS2 are h (3 + i) and h ( ⁇ 1 + i) multiplied by the complex gain h of the propagation path. Noise is ignored here.
- an irreducible vector h (1 + i) is obtained. This is a signal obtained by multiplying one of the four points of the QPSK signal to which the perturbation vector is not added by the complex gain of the propagation path. Since it is known that each point of QPSK has a norm of ⁇ 2, the absolute value
- the terminal device cannot determine whether the signal h (1 + i) obtained by the two-dimensional Euclidean mutual division method at the time of DMRS channel estimation is multiplied by h of 4 points ( ⁇ 1 ⁇ i) of QPSK. Assuming (1 + i), the phase arg (h) is obtained. Even if the other three points are ( ⁇ 1 + i), (1-i), and ( ⁇ 1 ⁇ i), the phase difference of the actual complex gain is always +90 degrees, +180 degrees, or +270 degrees. Become.
- a modulo operation is performed on DMRS1 and DMRS2.
- the modulo operation is the same processing for both I-ch and Q-ch, and is symmetric about each axis, and is symmetric about rotation of 90 degrees. Therefore, even if arg (h) is rotated by 90 degrees ⁇ integer multiple, there is no problem and modulo arithmetic can be performed on DMRS1 and DMRS2.
- DMRS1 after the modulo calculation is h (1 + i)
- DMRS2 is h (-1 + i).
- DMRS1 is h (1 + i) + ⁇ 1
- DMRS2 is h ( ⁇ 1 + i) + ⁇ 2.
- h ( ⁇ 1 ⁇ i) corresponding to the irreducible vector may not be calculated by the two-dimensional Euclidean algorithm. is there.
- the irreducible vector is 3 + 3i and does not coincide with the QPSK signal point.
- the base station apparatus also uses the two-dimensional Euclidean algorithm to determine that the case shown in FIG. 9 occurs, and transmits two points with no problem by changing the signal point. To do.
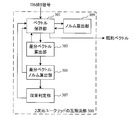
- 10 includes a vector storage unit 301, a difference vector calculation unit 303, a difference vector norm calculation unit 305, a convergence determination unit 307, and a norm calculation unit 309.
- Step S31 First, the vector storage unit 301 inputs the two input DMRSs into the norm calculation unit 309.
- the DMRS transmitted from the base station apparatus is multiplied by the complex gain h of the propagation path, and noise is added to the two DMRSs.
- the norm calculation unit 309 calculates the norms of the two input DMRSs, and inputs each norm to the vector storage unit 301.
- Step S33 The vector storage unit 301 inputs the norm corresponding to the two input DMRSs to the difference vector calculation unit 303.
- the difference vector calculation unit 303 has a norm of two input vectors (hereinafter, a signal recursively calculated by the difference vector calculation unit 303 with respect to two DMRSs is referred to as a “vector”).
- a vector a signal recursively calculated by the difference vector calculation unit 303 with respect to two DMRSs.
- Step S35 The difference vector norm calculation unit 305 calculates the norm of the four input vectors c1 to c4, inputs the vector having the smallest norm and the norm corresponding to the vector to the vector storage unit 301, and sets the most norm The norm of the vector having a small value is input to the convergence determination unit 307.
- Step S ⁇ b> 36 The convergence determination unit 307 compares the magnitude relationship between the input norm and a predetermined positive number T. When the norm is larger than T, the input norm and vector are input to the vector storage unit 301. When the norm is smaller than T, information indicating that the two-dimensional Euclidean algorithm is completed is input to the vector storage unit 301.
- the convergence condition is not set when the norm becomes 0, because the DMRS includes noise on the terminal device side. This is because the norm of the portion 307 does not become zero. However, since noise is usually smaller than DMRS, it is determined that convergence has occurred when the norm becomes smaller than T using a predetermined constant T.
- T The value of T is determined in advance by computer simulation in advance by a trade-off between the following two factors.
- Step S37 The vector storage unit 301 1) a norm corresponding to the vector input from the difference vector calculation unit 303, 2) Two norms corresponding to the vector input from the difference vector norm calculation unit 305 are input to the difference vector calculation unit 303, and the process is repeated again from step S34.
- Step S ⁇ b> 38 When information indicating that the two-dimensional Euclidean algorithm has been completed is input from the convergence determination unit 307, the vector storage unit 301 outputs a vector b (irreducible vector).
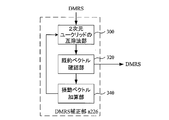
- FIG. 11 shows the configuration of the DMRS correction unit a226.
- the DMRS correction unit a ⁇ b> 226 includes a two-dimensional Euclidean algorithm unit 300, an irreducible vector confirmation unit 320, and a perturbation vector addition unit 340.
- This DMRS correction unit a226 aims to avoid in advance the above-described problem that the irreducible vector does not match the minimum lattice vector by the base station apparatus A2.
- the DMRS correction unit a226 first acquires the DMRS to which the perturbation vector is added from the nonlinear precoding unit a13.
- the perturbation vector is added to the DMRS acquired by the DMRS correction unit a226.
- a signal (q + z1 ⁇ + iz2 ⁇ ) before adding the filter W is used.
- two DMRSs are acquired at a time, and these two are paired in advance, and which two are paired is known by the base station apparatus A2 and the terminal apparatus B2n. is there.
- the two-dimensional Euclidean algorithm unit 300 obtains the irreducible vector (denoted as “d”) obtained by applying the two-dimensional Euclidean algorithm to the two DMRSs and the nonlinear precoding unit a13. These two DMRSs are input to the irreducible vector confirmation unit 320.
- the irreducible vector confirmation unit 320 uses the two DMRSs acquired from the nonlinear precoding unit a13. Is again input to the nonlinear precoding unit a13.
- the irreducible vector confirmation unit 320 uses two DMRSs acquired from the nonlinear precoding unit a13. Both are input to the perturbation vector adder 340.
- the perturbation vector addition unit 340 adds the perturbation vector ⁇ (or - ⁇ , i ⁇ , -i ⁇ ) to either one of the DMRSs acquired from the nonlinear precoding unit a13.
- which perturbation vector ⁇ is added to which DMRS is randomly selected using a random number or the like.
- the perturbation vector addition unit 340 inputs two DMRSs including the DMRS obtained by adding the perturbation vectors to the two-dimensional Euclidean algorithm unit 300 again.
- the 2D Euclidean algorithm section 300 performs the 2D Euclidean algorithm again using the new DMRS. Thereafter, the irreducible vector confirmation unit 320 determines that the irreducible vector d is one ( ⁇ 1 ⁇ i) of DMRS before adding the perturbation vector, that is, QPSK signal ( ⁇ 1 ⁇ i). The processing of the irreducible vector confirmation unit 320 and the perturbation vector addition unit 340 is continued.
- the irreducible vector confirmation unit 320 outputs two corrected DMRSs and inputs them to the nonlinear precoding unit a13.
- the nonlinear precoding unit a13 multiplies the DMRS by the filter W without searching for a new perturbation vector, and reciprocal g ⁇ 1 of the power normalization coefficient g. Multiply
- FIG. 12A shows the detailed configuration of the DMRS propagation path estimation unit b12.
- the DMRS propagation path estimation unit b12 includes a two-dimensional Euclidean division unit 300 and a complex gain calculation unit 350.
- the complex gain calculation unit 350 includes a provisional complex gain calculation unit 351, a DMRS propagation path compensation unit 352, a DMRS-Modulo unit 353, and a vector division unit 354, as shown in FIG.
- the DMRS propagation path estimation unit b12 acquires two DMRSs received by the terminal device B2n. These two are the DMRSs (referred to here as p 1 and p 2 ) that are the pair described in the DMRS correction unit a 226 in the base station apparatus.
- the two-dimensional Euclidean algorithm unit 300 performs a two-dimensional Euclidean algorithm on the two DMRSs to calculate an irreducible vector pred.
- irreducible vector p red because the complex gain h is multiplied is different from the irreducible vector d computed by the DMRS corrector A226.
- the irreducible vector pred is a signal obtained by multiplying one of the four points of the QPSK signal to which the perturbation vector is not added by the complex gain h of the propagation path and adding an error due to noise. is there.
- ( pred / ⁇ 2) of the complex gain of the propagation path can also be obtained.
- the provisional complex gain calculation unit 351 inputs the absolute value
- of the complex gain of the propagation path and the phase ⁇ ( arg ( pred / (1 + i))) calculated here to the DMRS propagation path compensation unit 352.
- the DMRS propagation path compensation unit 352 performs propagation path compensation for each DMRSp 1 and p 2 using the input absolute value
- DMRS propagation path compensation section 352 inputs DMRS q 1 and q 2 after propagation path compensation, the absolute value
- the DMRS-Modulo unit 353 uses the absolute value
- of the complex gain input from the DMRS propagation path compensation unit 352 and the phase ⁇ for the signals e 1 and e 2 on which the modulo operation has been performed, to generate the signal p mod1 (
- ⁇ e 1 ⁇ exp (2 ⁇ i ⁇ )) and p mod2 (
- the vector division unit 354 converts the signals p mod1 and p mod2 into the DMRS reference signal q (that is, the DMRS before the perturbation vector is added in the base station apparatus) for which the terminal apparatus previously knows the DMRS received by the terminal apparatus.
- the vector division unit 354 inputs the estimated complex gain h of the propagation path to the propagation path compensation unit b106.
- the base station apparatus A2 and the terminal apparatus B2n perform processing based on the two-dimensional Euclidean mutual division method, so that DMRS is spatially multiplexed by NLP MU-MIMO with a relatively small amount of calculation of the terminal apparatus B2n. It becomes possible to do. Accordingly, it is possible to reduce overhead due to insertion of DMRS.
- the base station apparatuses B1n and B2n according to the first embodiment and the second embodiment both perform VP using the nonlinear precoding unit a13 and the filter calculation unit a11.
- This embodiment is a method using THP having a calculation amount lower than that of VP.
- the base station apparatus according to the present embodiment is referred to as a base station apparatus A3
- the terminal apparatuses according to the present embodiment are referred to as terminal apparatuses B31 to B3N
- an arbitrary one is referred to as a terminal apparatus B3n.
- the non-linear precoding unit according to the present embodiment is referred to as a non-linear precoding unit a33, and the filter calculation unit according to the present embodiment is referred to as a filter calculation unit a31.
- the filter calculation unit a31 calculates the same propagation path matrix H as in the first embodiment, and then QR-decomposes H.
- H H QR (3-1)
- R is an upper triangular matrix and Q is a unitary matrix.
- H be the conjugate transpose of the matrix.
- A be a diagonal matrix obtained by extracting only the diagonal component of RH .
- the linear filter P 0 is calculated by the following equation using A and Q.
- the interference coefficient filter F is calculated by the following equation using A and R.
- the filter calculation unit a31 inputs the linear filter P 0 the interference coefficient filter F to the non-linear precoding unit a33.
- g trace ⁇ ((P 0 C v P 0 H ) / P tr ) 1/2 ⁇ (3-4)
- g ⁇ trace ((P 0 C v P 0 H ) / P tr ) ⁇ 1/2
- P s is the average power of the modulation signal
- P v is the average power of the data signal after the modulo calculation
- C v has diagonal components [P s , P v , P v ,. ] (3-5) Is a diagonal matrix.
- the filter calculation unit a31 inputs a new matrix obtained by multiplying the linear filter P 0 calculated by the equation (3-2) by g ⁇ 1 as the linear filter P to the nonlinear precoding unit a33. At this time, power normalization as shown in the first embodiment is not performed.
- the configuration of the non-linear precoding unit a33 is shown in FIG. 13, and a flowchart showing the operation thereof is shown in FIG.
- operations in the nonlinear precoding unit a33 will be described in order.
- Step S1 The interference calculation unit a131 and the linear filter multiplication unit a134 obtain the interference coefficient filter F and the linear filter P from the filter calculation unit a31, respectively.
- Step S2 1 is substituted into the number n indicating the number of the terminal device that is calculating the transmission signal.
- Step S3 The unique signal s1 addressed to the terminal device B31 is set to v1.
- Step S5 The interference calculation unit a131 calculates the interference signal f2 received by the terminal device B32 using v1 using the following equation.
- F (p, q) a 2 ⁇ 1 component of the matrix F.
- Step S6 The interference subtraction unit a133-2 subtracts f2 from the unique signal s2 addressed to the terminal device B32 to calculate the signal s2-f2.
- Step S7 The first modulo operation unit a132-2 applies the modulo operation to s2-f2 to calculate the signal v2.
- Step S4 The value of n is increased by 1.
- Step S5 The interference calculation unit a131 calculates the interference signal fn received by the terminal apparatus n using v1 to v (n-1) by the following equation.
- F (n, 1: n ⁇ 1) * [v1, v2,. . . , V (n ⁇ 1)] t (3-7)
- F (n, 1: n ⁇ 1) represents a horizontal vector indicating the components in the 1st to n ⁇ 1th columns of the nth row of the matrix F.
- Step S6 The n-th interference subtraction unit a133-n subtracts fn from the specific signal sn addressed to the n-th terminal apparatus B3n to calculate a signal sn-fn.
- Step S7 The modulo operation unit a132-n applies the modulo operation to sn-fn to calculate the signal vn. By this modulo calculation, the transmission signal power addressed to each terminal apparatus is reduced.
- x be a signal obtained by multiplying t by the linear filter P.
- each component of the signal x is a transmission signal transmitted in order from each antenna a101-1 to a101-N. This signal x is input to the frame configuration unit a142.
- THP can be considered as a perturbation vector search algorithm in the same way as VP.
- it is not an algorithm that searches for a truly optimal perturbation vector, but an algorithm that searches for a suboptimal perturbation vector with a small amount of computation compared to VP.
- the nonlinear precoding unit a33 x P 0 (I + F) ⁇ 1 s (3-8) The operation is performed.
- the signal x calculated by the non-linear precoding unit a33 is not necessarily a signal obtained by adding the optimum perturbation vector expressed by the equation (1-2), but becomes a sub-optimal signal x because power suppression is performed by modulo calculation. When the modulo operation is not performed, the norm is always smaller than Ws.
- THP using ordering or LR-THP is applicable similarly.
- a program for realizing the functions described in the present embodiment is recorded on a computer-readable recording medium, and the program recorded on the recording medium is read into a computer system and executed to execute processing of each unit. May be performed.
- the “computer system” here includes an OS and hardware such as peripheral devices.
- the “computer system” includes a homepage providing environment (or display environment) if a WWW system is used.
- the “computer-readable recording medium” means a storage device such as a flexible disk, a magneto-optical disk, a portable medium such as a ROM and a CD-ROM, and a hard disk incorporated in a computer system. Furthermore, the “computer-readable recording medium” dynamically holds a program for a short time like a communication line when transmitting a program via a network such as the Internet or a communication line such as a telephone line. In this case, a volatile memory in a computer system serving as a server or a client in that case, and a program that holds a program for a certain period of time are also included.
- the program may be a program for realizing a part of the above-described functions, or may be a program that can realize the above-described functions in combination with a program already recorded in a computer system.
- the present invention can be used for communication devices.
- CRS generation unit a142 ... frame configuration unit, a143 ... IFFT unit, a144 ... GI insertion unit, a145 ... transmission unit, a226 ... CRS correction unit, b12 ... propagation for DMRS Route estimation unit, b101 ... antenna, b102 ... receiving unit, b103 ... GI removal B104 ... FFT unit, b105 ... signal separation unit, b106 ... propagation path compensation unit, b107 ... CRS propagation path estimation unit, b108 ... propagation path state information generation unit, b109 ... modulo operation unit, b110 ... demodulation unit, b111 Decoding unit, b121 ... Perturbation vector candidate selection unit, b122 ...
- Perturbation vector addition unit b123 ... Temporary propagation channel estimation unit, b124 ... Propagation channel compensation unit, b125 ... Modulo operation unit, b126 ... Demodulation unit, b127 ... Perturbation vector evaluation Value calculation unit, b128 ... perturbation vector estimation unit, b131 ... IFFT unit, b132 ... GI insertion unit, b133 ... transmission unit, 300 ... two-dimensional Euclidean mutual removal unit, 301 ... vector storage unit, 303 ... difference vector calculation unit, 305 ... Difference vector norm calculation unit, 307 ... Convergence determination unit, 309 ... Norm calculation unit, 320 ... About vector checking unit, 340 ... perturbation vector adding section, 350 ... complex gain calculation unit, 351 ... temporary complex gain calculator, 352 ... DMRS channel compensation unit, 353 ... DMRS-Modulo unit, 354 ... Vector divider.
Landscapes
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Mobile Radio Communication Systems (AREA)
- Radio Transmission System (AREA)
Abstract
複数の受信装置に対して同一時刻・同一周波数でデータ信号を送信する送信装置であって、第1の受信装置宛の復調用参照信号と、前記第1の受信装置とは異なる第2の受信装置宛の復調用参照信号とを、同一時刻・同一周波数で送信する送信部、を有することを特徴とする送信装置。
Description
本発明は、送信装置、受信装置、通信システム、通信方法、および集積回路に関する。
<MIMO>
近年、無線データ通信の高速化を限られた周波数帯域で実現するため、周波数利用効率向上のための研究が多くなされてきた。その中でも、複数のアンテナを同時に利用することにより、単位周波数当たりの伝送容量を増やすMIMO(Multi-Input Multi-Output;多入力多出力)技術は注目されている。
近年、無線データ通信の高速化を限られた周波数帯域で実現するため、周波数利用効率向上のための研究が多くなされてきた。その中でも、複数のアンテナを同時に利用することにより、単位周波数当たりの伝送容量を増やすMIMO(Multi-Input Multi-Output;多入力多出力)技術は注目されている。
<LP MU-MIMO>
MIMOには、基地局装置(Base Station: BS)が1つの端末装置(Mobile Station:MS)に同一時刻・同一周波数で複数の信号を送信するSingle-User MIMO(SU-MIMO)と、異なる端末装置に同一時刻・同一周波数で信号を送信するMulti-User MIMO(MU-MIMO)がある。
MIMOには、基地局装置(Base Station: BS)が1つの端末装置(Mobile Station:MS)に同一時刻・同一周波数で複数の信号を送信するSingle-User MIMO(SU-MIMO)と、異なる端末装置に同一時刻・同一周波数で信号を送信するMulti-User MIMO(MU-MIMO)がある。
SU-MIMOは、端末装置が持つアンテナ数より多くのストリームを多重できないため、最大ストリーム数は端末装置の物理的なアンテナ数により制限される。一方で、基地局装置は端末装置よりも多くのアンテナを持つことができるため、基地局装置の余ったアンテナを最大限活かすためには、MU-MIMOも必須となる。既にLTE(Long Term Evolution)やLTE-Advancedでは、線形プレコーディング(Linear Precoding:LP)を用いたダウンリンク(Downlink:DL)MU-MIMOが仕様化されている(下記非特許文献1参照)。
<NLP MU-MIMO>
しかし、LPを用いたMU-MIMO(LP MU-MIMO)は、基地局装置が線形フィルタを乗算することで、送信信号を直交させて、端末装置間の干渉(Multi-User Interference:MUI)を除去しなければならず、空間多重できる端末装置の組み合わせの柔軟性が低下してしまう。
しかし、LPを用いたMU-MIMO(LP MU-MIMO)は、基地局装置が線形フィルタを乗算することで、送信信号を直交させて、端末装置間の干渉(Multi-User Interference:MUI)を除去しなければならず、空間多重できる端末装置の組み合わせの柔軟性が低下してしまう。
一方で、空間多重を実現する別の方法として、非線形プレコーディング(Nonlinear Precoding:NLP)MU-MIMOが提案されている。NLP MU-MIMOにおいて、端末装置は、受信信号を同相成分(In-phase channel:I-ch)と直交成分(Quadrature channel:Q-ch)の方向に、一定の幅(Modulo幅)の整数倍だけ平行移動した点を同一の点とみなすModulo演算を行う。これにより、基地局装置は、Modulo幅の任意の整数倍の信号(摂動ベクトル)を変調信号に加算可能となり、摂動ベクトルを適切に選択して各端末装置宛の信号に加算して送信電力を低減する(下記非特許文献2参照)。
<VP MU-MIMO>
端末装置が受信信号に対してModulo演算を施すことによって、基地局装置は、各変調信号に対してModulo幅の任意の整数倍の信号を加算する自由度を得る。この加算可能な信号を摂動ベクトル(Perturbation Vector)と呼ぶ。そして、この摂動ベクトルのうち最も電力効率を改善するものを、空間多重する全ての端末装置の伝搬路状態を考慮して、全探索する方法がVP(Vector Perturbation)MU-MIMO方式である。VP MU-MIMOは基地局装置の演算量が大きいものの、フル送信ダイバーシチ利得を得ることができ、非常に良好な特性を示すNLP MU-MIMO方式である(下記非特許文献2参照)。
端末装置が受信信号に対してModulo演算を施すことによって、基地局装置は、各変調信号に対してModulo幅の任意の整数倍の信号を加算する自由度を得る。この加算可能な信号を摂動ベクトル(Perturbation Vector)と呼ぶ。そして、この摂動ベクトルのうち最も電力効率を改善するものを、空間多重する全ての端末装置の伝搬路状態を考慮して、全探索する方法がVP(Vector Perturbation)MU-MIMO方式である。VP MU-MIMOは基地局装置の演算量が大きいものの、フル送信ダイバーシチ利得を得ることができ、非常に良好な特性を示すNLP MU-MIMO方式である(下記非特許文献2参照)。
<THP MU-MIMO>
VP MU-MIMOと異なり、各端末装置が受けるユーザ間干渉を考慮して、逐次的に各端末装置宛の信号に加算する摂動ベクトルを算出する方法をTHP(Tomlinson-Harashima precoding)MU-MIMOと呼ぶ。THP MU-MIMOは、基地局装置の送信処理の複雑度が低いものの、全端末装置でフル送信ダイバーシチを得ることができない(下記非特許文献3参照)。
VP MU-MIMOと異なり、各端末装置が受けるユーザ間干渉を考慮して、逐次的に各端末装置宛の信号に加算する摂動ベクトルを算出する方法をTHP(Tomlinson-Harashima precoding)MU-MIMOと呼ぶ。THP MU-MIMOは、基地局装置の送信処理の複雑度が低いものの、全端末装置でフル送信ダイバーシチを得ることができない(下記非特許文献3参照)。
<LR-THP>
また、THP MU-MIMOに、格子基底縮小(Lattice Reduction:LR)という処理を加えることで、VP MU-MIMOより少ない演算量でフル送信ダイバーシチ利得を得ることができる方法がLR-THPである(下記非特許文献3参照)。
また、THP MU-MIMOに、格子基底縮小(Lattice Reduction:LR)という処理を加えることで、VP MU-MIMOより少ない演算量でフル送信ダイバーシチ利得を得ることができる方法がLR-THPである(下記非特許文献3参照)。
<DMRS>
NLP MU-MIMOシステムにおいては、基地局装置が、DMRS(DeModulation Reference Signal:復調用参照信号)を各端末装置に対して送信する必要がある。しかし、基地局装置がデータ信号と同じ非線形プレコーディングをDMRSに施して送信しても、端末装置は、伝搬路推定することができないという問題がある。
NLP MU-MIMOシステムにおいては、基地局装置が、DMRS(DeModulation Reference Signal:復調用参照信号)を各端末装置に対して送信する必要がある。しかし、基地局装置がデータ信号と同じ非線形プレコーディングをDMRSに施して送信しても、端末装置は、伝搬路推定することができないという問題がある。
DMRSは、基地局装置が、NLP MU-MIMOによってプレコーディングを施したデータ信号の振幅と位相を予め各端末装置に通知するための信号である。DMRSに非線形プレコーディングを施したとすると基地局装置は、DMRSに対して摂動ベクトルを加算して(またはModulo演算を施して)から送信するため、端末装置においてもDMRSに対してModulo演算を施す必要がある。そのため、端末装置は、Modulo演算に必要なModulo幅をあらかじめ知っておく必要がある。Modulo幅は、受信信号における変調信号の振幅に比例するため、端末装置は、非線形プレコーディング後のデータ信号の受信ゲイン(伝搬路の複素利得)を知る必要がある。しかし、端末装置は、DMRSを用いて伝搬路推定をしなければ、受信ゲイン(伝搬路の複素利得)を知ることができない。つまり、端末装置は、「DMRSから伝搬路推定しなければ受信ゲイン(伝搬路の複素利得)が得られないが、その受信ゲインを知らなければ、DMRSを伝搬路推定できない。」という状態となるため、上記問題が起こる。
そこで、特許文献1に記載の技術では、直交した無線リソース(時間方向および周波数方向に分割した領域であって、異なるデータ信号や参照信号を割り当てても互いに干渉しない領域)で、各端末装置にDMRSを送信する。この場合、端末装置は、DMRSにModulo演算を施す必要が無いため、受信ゲインを得ることが出来る。
3GPP Technical Specification 36.211 v8.9.0
B.M.Hochwald,C.B.Peel,A.L.Swindlehurst,"A Vector-Perturbation Technique for Near-Capacity Multiantenna Multiuser Communication-Part II Perturbation," IEEE TRANSACTIONS ON COMMUNICATIONS, VOL.53,NO.3,pp.537-544,March 2005
F. Liu, L. Jiang, C. He, "Low complexity lattice reduction aided MMSE precoding design for MIMO systems," Proceedings of ICC 2007, pp. 2598 - 2603, June 2007.
しかしながら、上記特許文献1に示したように、直交した無線リソースに各端末装置宛のDMRSを配置する方法は、DMRS専用の無線リソースが端末装置数分だけ必要であるため、DMRS挿入によるオーバーヘッドの増加が大きくなるという問題があった。
本発明は、係る事情に鑑みてなされたものであり、NLP MU-MIMOシステムにおいてDMRSを空間多重してDMRS挿入によるオーバーヘッドの増加を最小限に抑えながら、端末装置において正常にデータ信号の振幅および位相(複素利得・受信ゲイン)を推定できる技術を提供することを目的とする。
本発明の一観点によれば、複数の受信装置に対して同一時刻・同一周波数でデータ信号を送信する送信装置であって、第1の受信装置宛の復調用参照信号と、前記第1の受信装置とは異なる第2の受信装置宛の復調用参照信号とを、同一時刻・同一周波数で送信する送信部、を有することを特徴とする送信装置が提供される。
送信装置において、空間多重された復調用参照信号(DMRS)は、一つの無線リソースで全移動局装置に対して復調用参照信号を送信できるので、データ信号を配置するための無線リソースを十分確保しながら、複数の復調用参照信号を全移動局装置に送信することができる。また各移動局装置(下記受信装置)は、複数の復調用参照信号を用いて伝搬路推定することができる。そのため本発明を用いれば復調用参照信号の挿入損を大きく低減できる。
前記復調用参照信号に対して、あらかじめ決めた所定の信号の整数倍の信号を加算する非線形プレコーディング部を有することが好ましい。また、前記復調用参照信号に対して、非線形プレコーディングを施す非線形プレコーディング部を有するようにしても良い。
前記送信部は、同一時刻・同一周波数で複数のデータ信号を送信し、前記非線形プレコーディング部は、前記復調用参照信号を、前記データ信号と同じ非線形プレコーディング処理することが好ましい。これにより、データ信号と全く同じフィルタを用いて同じ原理で非線形プレコーディングを行うことができる。
また、復調用参照信号を補正するDMRS補正部を有するようにしても良い。前記DMRS補正部は、前記復調用参照信号に2次元ユークリッド互除法を適用する2次元ユークリッド互除法部を有することが好ましい。また、前記2次元ユークリッド互除法部は、第1の前記復調用参照信号から、第2の前記復調用参照信号、第2の前記復調用参照信号の位相を90度回転させた信号、第2の前記復調用参照信号の位相を180度回転させた信号、および第2の前記復調用参照信号の位相を270度回転させた信号を減算して、差分ベクトル算出部を有するようにすると良い。
また、本発明は、復調用参照信号にあらかじめ決めた所定の幅の整数倍の信号を加算する摂動ベクトル加算部を有することを特徴とする受信装置である。前記信号を加算した復調用参照信号を用いて伝搬路推定する仮伝搬路推定部を有することが好ましい。複数の異なる前記信号を選択する摂動ベクトル候補選択部と、前記信号それぞれを用いて前記仮伝搬路推定部で伝搬路推定した伝搬路推定結果に基づいて、1つの前記信号を選択する摂動ベクトル推定部を有するようにすると良い。また、複数の異なる前記信号に対応する前記伝搬路推定結果それぞれに基づいてデータ信号を軟推定して対数尤度比をそれぞれ算出する復調部と、前記対数尤度比ぞれぞれの分散を算出する摂動ベクトル評価値算出部と、を有し、前記摂動ベクトル推定部は、前記分散のうち最も大きいものに対応する前記信号を選択することが好ましい。複数の前記復調用参照信号に対して2次元ユークリッドの互除法を適用し、既約ベクトルを算出する2次元ユークリッドの互除法部を有することが好ましい。前記既約ベクトルを用いて伝搬路の複素利得を算出する複素利得算出部を有することが好ましい。
また、本発明は、復調用参照信号に対して、あらかじめ決めた所定の信号の整数倍の信号を加算する非線形プレコーディング部と、復調用参照信号と他の信号を、同一時刻・同一周波数で送信する送信部とを有する送信装置と、復調用参照信号にあらかじめ決めた所定の幅の整数倍の信号を加算する摂動ベクトル加算部を有する受信装置と、を有することを特徴とする通信システムである。
また、本発明は、復調用参照信号に対して、あらかじめ決めた所定の信号の整数倍の信号を加算するステップと、復調用参照信号と他の信号を、同一時刻・同一周波数で送信するステップを有する送信方法と、復調用参照信号にあらかじめ決めた所定の幅の整数倍の信号を加算するステップを有する受信方法と、を有することを特徴とする通信方法である。
また、本発明は、復調用参照信号に対して、あらかじめ決めた所定の信号の整数倍の信号を加算する非線形プレコーディング部と、復調用参照信号と他の信号を、同一時刻・同一周波数で送信するステップを有する送信部と、を有することを特徴とする集積回路である。
また、本発明は、復調用参照信号にあらかじめ決めた所定の幅の整数倍の信号を加算する摂動ベクトル加算部を有することを特徴とする集積回路である。
まあ、本発明は、上記に記載の通信方法を、コンテンツに実行させるためのプログラムであっても良く、当該プログラムを記録するコンピュータ読み取り可能な記録媒体であっても良い。
本明細書は本願の優先権の基礎である日本国特許出願2011-043755号の明細書および/または図面に記載される内容を包含する。
以下、本発明を実施するための形態について、図面を参照しながら詳細に説明する。
(第1の実施形態: 対数尤度比の分散ベース)
<通信システム1について>
図1は、本発明の第1の実施形態に係る通信システム1の一構成例を示す概念図である。通信システム1は、基地局装置A1、および、第1から第Nまでの端末装置B11~B1Nを具備する(図1は、基地局装置A1が、第1から第4までの端末装置B11、B12、B13、およびB14を選択した場合の一例(N=4)を示す図である。)。
<通信システム1について>
図1は、本発明の第1の実施形態に係る通信システム1の一構成例を示す概念図である。通信システム1は、基地局装置A1、および、第1から第Nまでの端末装置B11~B1Nを具備する(図1は、基地局装置A1が、第1から第4までの端末装置B11、B12、B13、およびB14を選択した場合の一例(N=4)を示す図である。)。
基地局装置A1は、共通参照信号(Common Reference Signal:CRS)を送信する。なお、CRSは、基地局装置A1と第1から第4までの端末装置B11~B14とが、その基準信号を予め記憶する信号である。第1から第4までの端末装置B11~B14各々は、基地局装置A1が送信したCRSに基づいて伝搬路状態を推定し、推定した伝搬路状態に基づいて伝搬路状態情報を、基地局装置A1に通知する。
基地局装置A1は、第1から第4までの端末装置B11~B14に対して、DMRSおよびデータ信号を送信する。ここで、基地局装置A1は、DMRSおよびデータ信号に対して、プレコーディングを施し、乗算後のDMRSおよびデータ信号を送信する。
多重された第1から第4までの端末装置B11~B14は、基地局装置A1から受信したDMRSに基づいて、プレコーディング処理を伝搬路の一部とみなした等価伝搬路(以下、単に等価伝搬路と称する。)の伝搬路状態を推定し、推定した等価伝搬路の伝搬路状態を示す等価伝搬路状態情報に基づいてデータ信号を取得する。
図2は、本実施形態に係る通信システム1の動作の一例を示すシーケンス図である。この図は、図1の場合の通信システム1の動作の例を示す図である。
(ステップS101) 基地局装置A1は、第1から第4までの端末装置B11~B14に、CRSを送信する。その後、ステップS102に進む。
(ステップS102) 第1から第4までの端末装置B11~B14は、ステップS101で送信されたCRSに基づいて伝搬路状態を推定する。その後、ステップS103に進む。
(ステップS103) 第1から第4までの端末装置B11~B14は、ステップS102で推定した伝搬路状態に基づいて伝搬路状態情報を算出する。その後、ステップS104に進む。
(ステップS104) 第1から第4までの端末装置B11~B14は、ステップS103で算出した伝搬路状態情報を、基地局装置A1へ通知する。その後、ステップS105に進む。
(ステップS105) 基地局装置A1は、ステップS104で通知された伝搬路状態情報に基づいて、非線形プレコーディングに用いるフィルタを算出する。基地局装置A1は、生成したDMRSおよびデータ信号に対して、当該フィルタを用いて非線形プレコーディングを行い、DMRSおよびデータ信号を生成する。その後、ステップS106に進む。
(ステップS106) 基地局装置A1は、ステップS105で生成したDMRSの信号を、第1から第4までの端末装置B11、B12、B13、およびB14へ送信する。その後、ステップS107に進む。
(ステップS107) 第1から第4までの端末装置B11~B14は、ステップS106で送信されたDMRSの信号に基づいて、等価伝搬路の伝搬路状態を推定する。その後、ステップS108に進む。
(ステップS108) 基地局装置A1は、ステップS105で生成したデータ信号を、各端末装置B11~B14へ送信する。その後、ステップS109に進む。
(ステップS109) 第1から第4までの端末装置B11~B14は、ステップS108で推定した等価伝搬路の伝搬路状態を示す等価伝搬路状態情報に基づいて、データ信号を検出して取得する。
以下、図1・2では端末装置B11~B14まで4個多重したが、以降N個の第1から第Nまでの端末装置B11~B1Nを多重するとする。また、端末装置B11~B1Nを総称して端末装置B1nと呼ぶ。
<基地局装置A1について>
図3は、本実施形態に係る基地局装置A1の概略構成例を示す機能ブロック図である。この図において、基地局装置A1は、第1から第Nまでのアンテナa101-1~a101-N、第1から第Nまでの受信部a102-1~a102-N、第1から第NまでのGI(Guard Interval;ガードインターバル)除去部a103-1~a103-N、第1から第NまでのFFT(Fast Fourier Transform;高速フーリエ変換)部a104-1~a104-N、伝搬路状態情報取得部a105、フィルタ算出部a11、第1から第Nまでの符号部a121-1~a121-N、第1から第Nまでの変調部a122-1~a122-N、DMRS生成部a124、固有信号構成部a125、非線形プレコーディング部a13、CRS生成部a141、フレーム構成部a142、第1から第NまでのIFFT(Inverse Fast Fourier Transform;逆高速フーリエ変換)部a143-1~a143-N、第1から第NまでのGI挿入部a144-1~a144-N、および、第1から第Nまでの送信部a145-1~a145-Nを含んで構成される。
図3は、本実施形態に係る基地局装置A1の概略構成例を示す機能ブロック図である。この図において、基地局装置A1は、第1から第Nまでのアンテナa101-1~a101-N、第1から第Nまでの受信部a102-1~a102-N、第1から第NまでのGI(Guard Interval;ガードインターバル)除去部a103-1~a103-N、第1から第NまでのFFT(Fast Fourier Transform;高速フーリエ変換)部a104-1~a104-N、伝搬路状態情報取得部a105、フィルタ算出部a11、第1から第Nまでの符号部a121-1~a121-N、第1から第Nまでの変調部a122-1~a122-N、DMRS生成部a124、固有信号構成部a125、非線形プレコーディング部a13、CRS生成部a141、フレーム構成部a142、第1から第NまでのIFFT(Inverse Fast Fourier Transform;逆高速フーリエ変換)部a143-1~a143-N、第1から第NまでのGI挿入部a144-1~a144-N、および、第1から第Nまでの送信部a145-1~a145-Nを含んで構成される。
なお、図3の基地局装置A1は、N本のアンテナa101-1~a101-Nを備え、N個の端末装置を多重する場合の基地局装置である(例えば、図1、2の例では、N=4)。また、図3の基地局装置A1では、一例として上りリンクおよび下りリンクともに直交周波数分割多重(Orthogonal Frequency Division Multiplexing:OFDM)方式を用いる場合について説明するが、本発明はこれに限らず、基地局装置A1は、上りリンクおよび下りリンクの一方又は両方で、時間分割多重(Time Division Multiplexing:TDM)方式や周波数分割多重(Frequency Division Multiplexing:FDM)方式を用いてもよい。
第1から第Nまでの受信部a102-n(n=1、2、・・・、N)は、第1から第Nまでのアンテナa101-nを介して、各端末装置B1nから送信された信号(搬送波周波数の信号)を受信する。この信号には、伝搬路状態情報が含まれる。第1から第Nまでの受信部a102-nは、受信した信号をダウンコンバージョンし、A/D(アナログ/デジタル)変換することで、ベースバンドのデジタル信号を生成する。第1から第Nまでの受信部a102-nは、生成したデジタル信号を第1から第NまでのGI除去部a103-nに出力する。
第1から第NまでのGI除去部a103-nは、第1から第Nまでの受信部a102-nから入力されたデジタル信号からGIを除去し、除去後の信号を第1から第NまでのFFT部a104-nに出力する。
第1から第NまでのFFT部a104-nは、第1から第NまでのGI除去部a103-nから入力された信号に対して、FFTを行うことで、周波数領域の信号を生成する。第1から第NまでのFFT部a104-nは、生成した周波数領域の信号を伝搬路状態情報取得部a105に出力する。
伝搬路状態情報取得部a105は、第1から第NまでのFFT部a104-nから入力された信号を復調し、復調した情報から伝搬路状態情報を抽出する。伝搬路状態情報取得部a105は、抽出した伝搬路状態情報をフィルタ算出部a11に出力する。なお、第1から第NまでのFFT部a104-nが出力する信号のうち伝搬路状態情報の信号以外の信号は、制御部(図示せず)で復調される。復調された情報のうち制御情報は基地局装置A1の制御に用いられ、また、制御情報以外のデータは他の基地局装置やサーバ装置等へ送信される。
フィルタ算出部a11は、伝搬路状態情報取得部a105から入力された伝搬路状態情報に基づいて、非線形プレコーディングに用いるフィルタを算出する。フィルタ算出部a11が行うフィルタ算出処理の詳細については、後述する。フィルタ算出部a11は、算出したフィルタを非線形プレコーディング部a13に入力する。
第1から第Nまでの符号部a121-nには、各端末装置B1n宛(例えば、図1、2の例では、N=4)の情報ビット(データ)が入力される。第1から第Nまでの符号部a121-nは、入力された情報ビットを誤り訂正符号化し、符号化後の符号化ビットを第1から第Nまでの変調部a122-nに出力する。
第1から第Nまでの変調部a122-nは、第1から第Nまでの符号部a121-nから入力された符号化ビットを変調することで、端末装置B1n宛のデータ信号を生成する。第1から第Nまでの変調部a122-nは、生成したデータ信号を固有信号構成部a125に出力する。なお、基地局装置A1は、伝搬路状態情報に基づいて第1から第Nまでの変調部a122-nで用いる変調方式を決定し、決定した変調方式を示す変調情報を、変調部a122-nに出力し、基地局装置A1から第1から第Nまでの端末装置B1nへ通知する。
DMRS生成部a124は、第1から第Nまでの各端末装置B1n宛のDMRSを生成する。DMRS生成部a124は、生成したDMRSを、固有信号構成部a125に出力する。
固有信号構成部a125は、第1から第Nまでの各変調部122-nから入力された第1から第Nまでの端末装置B1n宛のデータ信号とDMRS生成部a124から入力された第1から第Nまでの端末装置B1n宛のDMRSとを関係付ける。固有信号構成部a125が関係付けた第1から第Nまでの端末装置B1n宛の情報各々を、第1から第Nまでの端末装置B1nの固有信号という。固有信号構成部a125は、関係付けることで生成した第1から第Nまでの端末装置B1nの固有信号各々を、非線形プレコーディング部a13に出力する。
非線形プレコーディング部a13は、固有信号構成部a125から入力された第1から第Nまでの端末装置B1nの固有信号(データ信号およびDMRS)に対して非線形プレコーディングを行う。非線形プレコーディング部a13が行う非線形プレコーディングの詳細については、後述する。非線形プレコーディング部a13は、非線形プレコーディングを行った固有信号を、フレーム構成部a142に出力する。
CRS生成部a141は、基地局装置A1と第1から第Nまでの端末装置B1nで既知の基準信号を有するCRSを生成し、生成したCRSをフレーム構成部a142に出力する。
フレーム構成部a142は、非線形プレコーディング部a13から入力された固有信号、および、CRS生成部a141から入力されたCRSをマッピングする。なお、フレーム構成部a142は、固有信号とCRSとを別のフレームにマッピングしてもよいし、同じフレームにマッピングしてもよい。例えば、CRSのみをあるフレームにマッピングし、CRSおよび固有信号を他のフレームにマッピングしてもよい。なお、基地局装置A1は、あらかじめ決められたマッピングに従ってCRSと固有信号をフレームにマッピングし、第1から第Nまでの端末装置B1nは、マッピングをあらかじめ把握しているものとする。
フレーム構成部a142は、マッピング後の信号のうちアンテナa101-nで送信する信号を、第1から第NまでのIFFT部a143-nに、フレーム単位で出力する。
第1から第NまでのIFFT部a143-nは、フレーム構成部a142から入力された信号に対して、IFFTを行うことで、時間領域の信号を生成する。第1から第NまでのIFFT部a143-nは、生成した時間領域の信号を第1から第NまでのGI挿入部a144-nに出力する。
第1から第NまでのGI挿入部a144-nは、第1から第NまでのIFFT部a143-nから入力された信号に対して、ガードインターバルを付与し、付与後の信号を第1から第Nまでの送信部a145-nに出力する。
第1から第Nまでの送信部a145-nは、第1から第NまでのGI挿入部a144-nから入力された信号(ベースバンドのデジタル信号)をD/A(デジタル/アナログ)変換する。第1から第Nまでの送信部a145-nは、変換後の信号をアップコンバージョンすることで搬送波周波数の信号を生成する。第1から第Nまでの送信部a145-nは、生成した信号を第1から第Nまでのアンテナa101-nを介して送信する。
図4は、本実施形態に係る固有信号の構成の一例を示す概略図である。この図において、横軸は時間を表す。この図は、固有信号構成部a125が出力した固有信号を表す。また、この図は、同一の周波数で送信する、第1から第Nまでの端末装置B1nの固有信号の配置を時間軸を揃えて表したものである。
なお、図4では、第1から第Nまでの端末装置B1n宛のDMRSを「DMRS-MSn」との表記で表している。この図は、固有信号が、第1から第Nまでの端末装置B1n毎の信号であってDMRSとデータ信号とから構成されることを示す。例えば、符号S11を付した信号は、端末装置B11宛のDMRS(DMRS‐MS1)を示す。
図4は、第1から第Nまでの端末装置B1n宛のDMRS各々が、固有信号構成部a125から全て同じ時間に出力されることを示す。また、この図は、第1から第Nまでの各端末装置B1n宛のデータ信号も、固有信号構成部a125から同じ時間に出力されることを示す。なお、上述のように、同時刻に割り当てられたデータ信号同士、DMRS同士はともに非線形プレコーディングa13で空間多重され、基地局装置A1から同一時刻・同一周波数(つまり同一OFDMシンボルの同一サブキャリア)で送信される。また、図4は、DMRSとデータ信号とが、固有信号構成部a125から異なる時間に出力されることを示す。例えば、第1から第Nまでの端末装置B1n宛のDMRSは時間t1と時間t2に出力され、データ信号はt3~tLに出力される。
なお、図4における固有信号の構成は一例であり、本発明はこれに限られない。例えば、図4では、端末装置B1n宛のDMRSが出力された後(t3以降)にデータ信号が出力されているが、固有信号構成部a125は、データ信号を出力後にDMRSを出力してもよい。また、固有信号構成部a125は、データ信号とDMRSを時間軸上で交互に出力してもよいし、その他の順序で出力してもよい。
また、図5Aは、本実施形態に係るフレームの構成の一例を示す概略図である。この図は、フレーム構成部a142が信号をマッピングしたフレームの構成を示す。また、この図は、第1から第Nまでの各アンテナa101-nで送信するフレームの構成を、時間軸を揃えて表したものである。
なお、図5Aでは、第1から第Nまでのアンテナa101-nから送信するCRSを「CRS-Txn」との表記で表している。この図は、第1から第Nまでのアンテナa101-n毎のフレーム各々が、CRSと固有信号(データ信号とDMRSから構成される非線形プレコーディング後の固有信号)とから構成されることを示す。例えば、符号S21を付した信号は、アンテナa101-1で送信するCRS(CRS-Tx1)を示す。また、符号S22を付した信号は、アンテナa101-1で送信する固有信号であって、非線形プレコーディング後の固有信号を示す。
図5Aは、アンテナa101-nで送信するCRS各々が、フレーム構成部a142で互いに異なる時間帯域に配置され、基地局装置A1から送信されることを示す。例えば、アンテナa101-1で送信されるCRSは時間t1に送信され、アンテナa101-2で送信されるCRSは時間t2に送信される。
また、図5Aは、CRSと固有信号とが、フレーム構成部a142で異なる時間帯域に配置されることを示す。例えば、アンテナa101-nで送信するCRSは時間t1~tNに送信される時間帯域に配置され、固有信号はtN+1以降の帯域に配置される。また、この図は、第1から第Nまでのアンテナa101-nで送信する固有信号が、全てフレーム構成部a142で同じ時間帯域に配置されることを示す。
なお、図5Aにおけるフレームの構成は一例であり、本発明はこれに限られない。例えば、図5Aでは、アンテナa101-nで送信するCRSの全てが先の時間帯域(tN+1より前)に配置され、後の時間帯域(tN+1以降)に固有信号が配置されているが、フレーム構成部a142は、固有信号を先の時間帯域に配置してCRSを後の時間帯域に配置してもよい。また、フレーム構成部a142は、固有信号とCRSとを交互する時間帯域に配置してもよいし、他の順序で配置してもよい。例えば、フレーム構成部a142は、アンテナa101-1で送信するCRSを時間tN+1以降の時間帯域に配置し、固有信号を時間tN+1より前の時間帯域に配置してもよい。なお、基地局装置A1は、固有信号の送信を開始する前には、CRSのみを配置したフレームを送信する。
さらに図5Bおよび図5Cに、第1から第Nまでの各アンテナa101-nで送信するフレームの一構成例を示す。図4および図5Aでは、DMRSとデータ信号、または、CRSと固有信号(DMRSとデータ信号が含まれる。)を時間方向に並べた例を図示したが、図5Bおよび図5Cに示すように、時間方向(t)および周波数方向(f)の2次元マトリックス上にCRS、DMRS、およびデータ信号を配置してもよい。
<端末装置B1nについて>
図6は、本実施形態に係る端末装置B1nの一構成例を示す機能ブロック図である。この図において、端末装置B1nは、アンテナb101、受信部b102、GI除去部b103、FFT部b104、信号分離部b105、CRS用伝搬路推定部b107、DMRS用伝搬路推定部b12、伝搬路補償部b106、Modulo演算部b109、復調部b110、復号部b111、伝搬路状態情報生成部b108、IFFT部b131、GI挿入部b132、および、送信部b133を含んで構成される。
図6は、本実施形態に係る端末装置B1nの一構成例を示す機能ブロック図である。この図において、端末装置B1nは、アンテナb101、受信部b102、GI除去部b103、FFT部b104、信号分離部b105、CRS用伝搬路推定部b107、DMRS用伝搬路推定部b12、伝搬路補償部b106、Modulo演算部b109、復調部b110、復号部b111、伝搬路状態情報生成部b108、IFFT部b131、GI挿入部b132、および、送信部b133を含んで構成される。
受信部b102は、アンテナb101を介して、各端末装置B1nから送信された信号(搬送波周波数の信号)を受信する。受信部b102は、受信した信号をダウンコンバージョンし、A/D(アナログ/デジタル)変換することで、ベースバンドのデジタル信号を生成する。受信部b102は、生成したデジタル信号をGI除去部b103に出力する。
GI除去部b103は、受信部b102から入力されたデジタル信号からGIを除去し、除去後の信号をFFT部b104に出力する。
FFT部b104は、GI除去部b103から入力された信号に対して、高速フーリエ変換を行うことで、周波数領域の信号を生成する。FFT部b104は、生成した周波数領域の信号を信号分離部b105に出力する。
信号分離部b105は、基地局装置A1から通知されたマッピング情報に基づいて、FFT部b104から入力された信号をデマッピングする。信号分離部b105は、デマッピングした信号のうち、CRSをCRS用伝搬路推定部b107に出力し、DMRSをDMRS用伝搬路推定部b12に出力する。信号分離部b105は、データ信号を伝搬路補償部b106に出力する。さらに信号分離部b105は、データ信号をDMRS用伝搬路推定部b12に入力する。
CRS用伝搬路推定部b107は、信号分離部b105から入力されたCRSに基づいて伝搬路状態を推定し、推定した伝搬路状態を示す情報を伝搬路状態情報生成部b108に出力する。
DMRS用伝搬路推定部b12は、信号分離部b105から入力されたDMRSに基づいて非線形プレコーディングに用いるフィルタを伝搬路の一部とみなした等価伝搬路の伝搬路状態を推定する。なお、DMRS用伝搬路推定部b12の詳細については後述する。DMRS用伝搬路推定部b12は、推定した等価伝搬路の伝搬路状態を示す等価伝搬路状態情報を伝搬路補償部b106に出力する。伝搬路補償部b106は、DMRS用伝搬路推定部b12から入力された等価伝搬路状態情報を用いて、信号分離部b105から入力された信号に対して伝搬路補償を行う。伝搬路補償部b106は、伝搬路補償後の信号をModulo演算部b109に出力する。
Modulo演算部b109は、基地局装置A1から通知された変調情報に基づいて、伝搬路補償部b106から入力された信号に対して、Modulo演算を行う。Modulo演算は、下式で表すことが出来る。
mod(α)=α-floor((Re[α]+τ/2)/τ)τ-i×floor((Im[α]+τ/2)/τ)τ
(1-1)
ここで、式(1-1)は信号αにModulo幅τのModulo演算を施した場合を示している。また、floor(x)はxを超えない最大の整数を示し、Re[α]およびIm[α]は複素数αの実部および虚部をそれぞれ表す。なお、iは虚数単位である。また、τはModulo幅を表す。データ信号の変調方式がQPSKならばτは、QPSK信号の平均振幅の2√2倍、16QAMならば16QAM信号の8/√10倍、64QAMならば64QAM信号の16/√42倍にすることが望ましい。ただし、基地局装置と端末装置とで共通の値を用いればModulo幅は他の値でもよい。
(1-1)
ここで、式(1-1)は信号αにModulo幅τのModulo演算を施した場合を示している。また、floor(x)はxを超えない最大の整数を示し、Re[α]およびIm[α]は複素数αの実部および虚部をそれぞれ表す。なお、iは虚数単位である。また、τはModulo幅を表す。データ信号の変調方式がQPSKならばτは、QPSK信号の平均振幅の2√2倍、16QAMならば16QAM信号の8/√10倍、64QAMならば64QAM信号の16/√42倍にすることが望ましい。ただし、基地局装置と端末装置とで共通の値を用いればModulo幅は他の値でもよい。
Modulo演算部b109は、Modulo演算後の信号を復調部b110に出力する。
復調部b110は、基地局装置A1から通知された変調情報が示す変調方式で、Modulo演算部b109から入力された信号を復調する。復調部b110は、復調後の情報(硬判定した符号化ビット又は符号化ビットの軟推定値)を復号部b111に出力する。
復号部b111は、復調部b110から入力された情報を復号することで、情報ビットを取得し、取得した情報ビットを出力する。
伝搬路状態情報生成部b108は、CRS用伝搬路推定部b107から入力された伝搬路状態から伝搬路状態情報を生成する(伝搬路状態情報生成処理という)。ここで、推定した伝搬路状態を行ベクトルhn=[hn1,hn2,…,hnN]とおく。hn1,hn2,…hnNはそれぞれアンテナa101-1、アンテナa101-2、…、アンテナa101-Nと端末装置B1nの間の伝搬路状態である。伝搬路状態情報生成部b108は、必ずしも行ベクトル|hn|をそのまま伝搬路状態情報にして基地局装置A1に通知する必要は無い。例えば、行ベクトルのノルム|hn|を、所定の数Cに正規化した行ベクトルC×hn/|hn|を伝搬路状態情報として、基地局装置A1に通知しても良いし、あらかじめ決められた値に近似したものを伝搬路状態情報として基地局装置A1に通知してもよい。
伝搬路状態情報生成部b108は、生成した伝搬路状態情報を変調し、変調後の伝搬路状態情報の信号をIFFT部b131に出力する。
IFFT部b131は、伝搬路状態情報生成部b108から入力された信号に対して、逆高速フーリエ変換を行うことで、時間領域の信号を生成する。IFFT部b131は、生成した時間領域の信号をGI挿入部b132に出力する。
GI挿入部b132は、IFFT部b131から入力された信号に対して、ガードインターバルを付与し、付与後の信号を送信部b133に出力する。
送信部b133は、GI挿入部b132から入力された信号(ベースバンドのデジタル信号)をD/A(デジタル/アナログ)変換する。送信部b133は、変換後の信号をアップコンバージョンすることで搬送波周波数の信号を生成する。送信部b133は、生成した信号を、アンテナb101を介して送信する。
<フィルタ算出部a11>
図3に示すフィルタ算出部a11は、伝搬路状態情報取得部a105から入力された伝搬路状態情報から伝搬路行列Hを構成する。Hは、N行N列の行列であり、p行q列成分が、p番目の端末装置B1pと基地局装置のq番目のアンテナa101-qの間の伝搬路の複素利得を示す(ここでpとqは1からNまでの任意の整数である。)。つまり、各端末装置B1pから通知された伝搬路状態情報から取得した伝搬路状態が行ベクトルとなり、全端末装置に対応する行ベクトルを各行に持つ行列を生成することで伝搬路行列Hを生成できる。また端末装置B1nで伝搬路状態情報のノルムが正規化されていても基地局装置A1は、端末装置B1nから通知された伝搬路状態情報をそのまま、つまり、正規化後の伝搬路状態を各行に用いて伝搬路行列Hを生成する。
図3に示すフィルタ算出部a11は、伝搬路状態情報取得部a105から入力された伝搬路状態情報から伝搬路行列Hを構成する。Hは、N行N列の行列であり、p行q列成分が、p番目の端末装置B1pと基地局装置のq番目のアンテナa101-qの間の伝搬路の複素利得を示す(ここでpとqは1からNまでの任意の整数である。)。つまり、各端末装置B1pから通知された伝搬路状態情報から取得した伝搬路状態が行ベクトルとなり、全端末装置に対応する行ベクトルを各行に持つ行列を生成することで伝搬路行列Hを生成できる。また端末装置B1nで伝搬路状態情報のノルムが正規化されていても基地局装置A1は、端末装置B1nから通知された伝搬路状態情報をそのまま、つまり、正規化後の伝搬路状態を各行に用いて伝搬路行列Hを生成する。
フィルタ算出部a11は、伝搬路行列Hの逆行列W(=H-1)を算出し、非線形プレコーディング部a13に入力する。
<非線形プレコーディング部a13詳細>
固有信号構成部a125から入力された各固有信号をsnとおき、全s1~sNを各成分に持つ縦ベクトルをsとする。ここで固有信号とは、テータ信号およびDMRS生成部a124で生成されたDMRSを示す。ここでDMRS信号はデータ信号とは独立にτの値を決めることが出来るが、基地局装置と端末装置とで共通の値を用いる必要がある。例えばDMRS信号がQPSK信号の1点に一致するとすれば、データ信号が16QAMで変調されていてもτ=2√2とする。非線形プレコーディング部a13は、フィルタWを乗算後の送信信号のノルムが最小となるようなN次元整数縦ベクトルz1とz2の組み合わせを探索する。これを式で表すと以下のようになる。
固有信号構成部a125から入力された各固有信号をsnとおき、全s1~sNを各成分に持つ縦ベクトルをsとする。ここで固有信号とは、テータ信号およびDMRS生成部a124で生成されたDMRSを示す。ここでDMRS信号はデータ信号とは独立にτの値を決めることが出来るが、基地局装置と端末装置とで共通の値を用いる必要がある。例えばDMRS信号がQPSK信号の1点に一致するとすれば、データ信号が16QAMで変調されていてもτ=2√2とする。非線形プレコーディング部a13は、フィルタWを乗算後の送信信号のノルムが最小となるようなN次元整数縦ベクトルz1とz2の組み合わせを探索する。これを式で表すと以下のようになる。
(Z1,Z2)=argmin(z1,z2)|W(s+z1τ+iz2τ)|
(1-2)
右辺のノルム|W(s+z1τ+iz2τ)|を最小にする(z1,z2)の組み合わせを(Z1,Z2)とおく。z1とz2の各成分はいかなる整数をも取り得るので、総当たりで探索するのは不可能である。そこで、z1とz2の各成分の探索範囲を、あらかじめ決められた範囲(たとえば絶対値がLBS以下の整数:[-LBS,-LBS+1,...,-2,-1,0,1,2,...,LBS-1,LBS])に限定する。このように信号点Wsを中心とした点を候補にして探索を行うのが望ましいが、これ以外の方法で、ノルムを最小とする点を探索してもよい。いまz1τ+iz2τを摂動ベクトルと呼ぶ。算出した(Z1,Z2)を用いた信号x=W(s+Z1τ+iZ2τ)の、電力正規化を行う。
(1-2)
右辺のノルム|W(s+z1τ+iz2τ)|を最小にする(z1,z2)の組み合わせを(Z1,Z2)とおく。z1とz2の各成分はいかなる整数をも取り得るので、総当たりで探索するのは不可能である。そこで、z1とz2の各成分の探索範囲を、あらかじめ決められた範囲(たとえば絶対値がLBS以下の整数:[-LBS,-LBS+1,...,-2,-1,0,1,2,...,LBS-1,LBS])に限定する。このように信号点Wsを中心とした点を候補にして探索を行うのが望ましいが、これ以外の方法で、ノルムを最小とする点を探索してもよい。いまz1τ+iz2τを摂動ベクトルと呼ぶ。算出した(Z1,Z2)を用いた信号x=W(s+Z1τ+iZ2τ)の、電力正規化を行う。
基地局装置A1は、送信電力を一定にするために、一定数のサブキャリアおよび一定数のOFDMシンボル(「電力正規化単位」と呼ぶ。)内のデータ信号の総送信電力を正規化しなければならない。電力正規化単位は、例えば図5Bや図5Cに示したフレーム単位全体を示す。まず、非線形プレコーディングにより算出したデータ信号xの電力の電力正規化単位に亘る総和Pxを算出する。1つの電力正規化単位のデータ信号の送信に基地局装置A1が割り当てられる総電力がPtrであるとすると、電力正規化係数g( =(Px/Ptr)1/2 )を算出する。非線形プレコーディング部a13は電力正規化係数gの逆数を固有信号x(データ信号およびDMRS)に乗算し、乗算後のデータ信号をフレーム構成部a142に入力する。ここで、信号xの各成分は、順番に第1から第Nまでの各アンテナa101-1~a101-Nで送信する送信信号を示す。
なお、端末装置B1nでは、DMRS信号自体がg-1倍されているので、DMRS用伝搬路推定部b12で伝搬路推定し、伝搬路補償部b106で、データ信号に対して振幅をg倍して補償することが出来る。すなわち受信したデータ信号をg倍することで正しく信号を検出できる。
以上のように、本発明に係る非線形プレコーディング部a13は電力の正規化も含めてデータ信号と同じ非線形プレコーディングをDMRSに対しても施す。
<DMRS伝搬路推定部b12詳細>
基地局装置B1でW(=H-1)をデータ信号に乗算しているので理想的な環境では受信信号がHWs=sとなり、データ信号を伝搬路補償する必要が無い。しかし、1)基地局装置A1で電力の正規化を行っており、2)端末装置B1nが伝搬路状態情報をフィードバックした時と基地局装置A1がデータ信号を送信する時とで伝搬路状態が変動するため、あらためて、データ信号受信時に、データ信号と同じプレコーディング処理が施されたDMRSを使ってデータ信号の受信ゲイン(プレコーディングも含めた等価的な伝搬路の複素利得)を推定する必要がある。
基地局装置B1でW(=H-1)をデータ信号に乗算しているので理想的な環境では受信信号がHWs=sとなり、データ信号を伝搬路補償する必要が無い。しかし、1)基地局装置A1で電力の正規化を行っており、2)端末装置B1nが伝搬路状態情報をフィードバックした時と基地局装置A1がデータ信号を送信する時とで伝搬路状態が変動するため、あらためて、データ信号受信時に、データ信号と同じプレコーディング処理が施されたDMRSを使ってデータ信号の受信ゲイン(プレコーディングも含めた等価的な伝搬路の複素利得)を推定する必要がある。
DMRS伝搬路推定部b12の詳細な構成を図7に示す。DMRS伝搬路推定部b12は、摂動ベクトル候補選択部b121、摂動ベクトル加算部b122、仮伝搬路推定部b123、伝搬路補償部b124、Modulo演算部b125、復調部b126、摂動ベクトル評価値算出部b127、および摂動ベクトル推定部b128から構成される。
(ステップS21) まず、摂動ベクトル候補選択部b121が、候補となる摂動ベクトル候補を選択して、選択した摂動ベクトルを摂動ベクトル加算部b122に入力する。ここで候補となる摂動ベクトルZaは、
Za=(z1a+iz2a)τ
(1-3)
で表される。ここでz1aとz2aは、N次元縦ベクトルであり、各成分があらかじめ決められた範囲(たとえば絶対値がLMS以下の整数:[-LMS,-LMS+1,...,-2,-1,0,1,2,...,LMS-1,LMS])をとる。そのため式(1-3)の摂動ベクトルの候補は、(2LMS+1)2N個存在する。ここでは、基地局装置A1と端末装置B1nで共通のDMRS用のModulo幅を用いる。
Za=(z1a+iz2a)τ
(1-3)
で表される。ここでz1aとz2aは、N次元縦ベクトルであり、各成分があらかじめ決められた範囲(たとえば絶対値がLMS以下の整数:[-LMS,-LMS+1,...,-2,-1,0,1,2,...,LMS-1,LMS])をとる。そのため式(1-3)の摂動ベクトルの候補は、(2LMS+1)2N個存在する。ここでは、基地局装置A1と端末装置B1nで共通のDMRS用のModulo幅を用いる。
なお、式(1-3)において、基地局装置でも摂動ベクトルの候補を同様に制限したが、ここではLBS=LMSであることが望ましいが、端末装置B1nの演算量低減のためLBS>LMSとしても良い。
また、第3の実施形態で後述するTHPやLR-THPの場合においては、LBSを決めることが出来ないので、端末装置B1nの演算量によってLMSを決めても良い。
(ステップS22) 次に、摂動ベクトル加算部b122は、基準信号(基地局装置から送信される信号であって、非線形プレコーディング前のDMRS信号)qに摂動ベクトル候補Za=(Z1a+iZ2a)τを加算して信号q+Zaを算出する。摂動ベクトル加算部b122は、信号q+Zaを仮伝搬路推定部b123に入力する。
(ステップS23) 次に、仮伝搬路推定部b123は、信号q+Zaで受信したDMRSpを除算する。すると複素利得は、h=p/(q+Za)と推定できる。
仮伝搬路推定部b123は、複素利得hの振幅|h|と位相arg(h)とを伝搬路補償部b124、および、摂動ベクトル推定部b128に入力する。
(ステップS24) 伝搬路補償部b124は、仮伝搬路推定部b123から入力された振幅および位相を用いて、当該DMRSが配置されたフレーム内のデータ信号を伝搬路補償する。つまり受信信号を複素利得hで除算する。伝搬路補償後のデータ信号をModulo演算部b125に入力する。
(ステップS25) Modulo演算部b125は、伝搬路補償部b124が伝搬路補償したデータ信号に対してModulo演算を行う。基地局装置A1と端末装置B1nで共通のデータ信号用のModulo幅を用いる。Modulo演算部b125はModulo演算後のデータ信号を復調部b126に入力する。
(ステップS26) 復調部b126は、入力されたModulo演算後のデータ信号に対して、軟推定を行い、軟推定値を摂動ベクトル評価値算出部b127に入力する。
なお、復調部b126は軟推定値を対数尤度比(Log Likelihood Ratio:LLR)で算出するとする。LLRは次式で算出する。



復調部b126は式(1-4)と式(1-5)に基づいて、各データ信号に割り当てられた各ビットに対応するLLRを摂動ベクトル評価値算出部b127に入力する。すなわち、QPSKの場合はデータ信号の数×2個、16QAMの場合はデータ信号の数×4個のLLRを算出して、摂動ベクトル評価値算出部b127に入力する。
(ステップS27) 摂動ベクトル評価値算出部b127は、入力されたLLRの分散を算出し、算出したLLRの分散および対応するLLRを摂動ベクトル推定部b128に入力する。なおLLRの分散は下式で算出する。

ここで、Vは摂動ベクトルの候補毎に軟推定したデータ信号の個数である。またMは各変調方式に割り当てられたビット数であり、QPSKで2、16QAMで4となる。またLv
mは第v番目のデータ信号に割り当てられたm番目のビットのLLRを示す。
(ステップS28) 摂動ベクトル推定部b128は、摂動ベクトル評価値算出部b127から入力された各摂動ベクトル候補に対応するLLRの分散の中で最も大きいものを選択し、最大の分散を有する摂動ベクトルに対応するデータ信号の振幅と位相(「等価伝搬路状態情報」と呼ぶ。)を出力し、DMRS伝搬路推定部b12の外の伝搬路補償部b106(図6)に入力する。
LLRの分散が大きいということは、各摂動ベクトル候補を仮定した時に、基地局装置A1から伝わった相互情報量が最も大きいということを示す。LLRは、各ビットが1か0かという「確からしさ・確率」が高いほど、絶対値が大きくなる。そのため、各摂動ベクトル候補を仮定した中で、それぞれのLLRの分散を算出し、LLRの分散が最も大きい摂動ベクトルを選ぶことで、その摂動ベクトルが最も「確からしさ・確率」が高い摂動ベクトルであると推定できる。
尚、DMRS伝搬路推定部b12内の伝搬路補償部b124、Modulo演算部b125、および復調部b126は、DMRS伝搬路推定部b12外の伝搬路補償部b106、Modulo演算部b109、および復調部b110とそれぞれ同じ動作を行うので、回路規模低減のため、両構成部分を共通の回路としても良い。また、一度復調部b126で算出した軟推定値のうち摂動ベクトル推定部b128で推定された摂動ベクトルに対応する軟推定値を復号部b111で用いることで、二重に軟推定値を算出することを避けて演算量を低減しても良い。
<効果>
本実施形態で示したように、基地局装置がDMRSをNLP MU-MIMOにより、空間多重して送信することで、電力効率良く、DMRS挿入によるオーバーヘッドを低減できる。
本実施形態で示したように、基地局装置がDMRSをNLP MU-MIMOにより、空間多重して送信することで、電力効率良く、DMRS挿入によるオーバーヘッドを低減できる。
尚、摂動ベクトルの推定のために軟推定するデータ信号は、フレームの一部のデータ信号でもよい。また、LLRの分散以外の指標を用いて摂動ベクトルを推定してもよい。
(第2の実施形態: 2次元ユークリッドの互除法)
第1の実施形態では、端末装置B1nが摂動ベクトルの候補から最尤な摂動ベクトルを推定した。これによりDMRSをNLP MU-MIMOによって空間多重することが可能となった。本実施形態では、本実施形態に係る基地局装置A2と本実施形態に係る端末装置B2nの両装置が、「2次元ユークリッドの互除法」という処理を導入することで、端末装置B2nの演算量を第1の実施形態よりも低減する。
第1の実施形態では、端末装置B1nが摂動ベクトルの候補から最尤な摂動ベクトルを推定した。これによりDMRSをNLP MU-MIMOによって空間多重することが可能となった。本実施形態では、本実施形態に係る基地局装置A2と本実施形態に係る端末装置B2nの両装置が、「2次元ユークリッドの互除法」という処理を導入することで、端末装置B2nの演算量を第1の実施形態よりも低減する。
また本実施形態に係る基地局装置A2はDMRS補正部a226を有すること以外、本実施形態に係る端末装置B2nにおいてはDMRS伝搬路推定部b22の動作以外、第1の実施形態の基地局装置A1、端末装置B1nと全く同じ構成を有するので、相違する部分を除き詳細な説明は省略する。図15に基地局装置A2の構成を示す。上述の通り、図3に対して、DMRS補正部a226が新たに追加されている。
以降、基地局装置A2のDMRS補正部a226と端末装置B2nのDMRS伝搬路推定部b22について詳細に説明する。
<2次元ユークリッドの互除法>
本実施形態に係る基地局装置A2および端末装置B2nは、両方とも「2次元ユークリッドの互除法」という処理を行う2次元ユークリッドの互除法部を有する。2次元ユークリッドの互除法部は、本実施形態の特徴部分の1つであるため、原理を先に説明する。
本実施形態に係る基地局装置A2および端末装置B2nは、両方とも「2次元ユークリッドの互除法」という処理を行う2次元ユークリッドの互除法部を有する。2次元ユークリッドの互除法部は、本実施形態の特徴部分の1つであるため、原理を先に説明する。
2次元ユークリッドの互除法は、通常のユークリッドの互除法を2次元に拡張したアルゴリズムである。ここでは通常のユークリッドの互除法を1次元ユークリッドの互除法と呼ぶ。1次元ユークリッドの互除法は、異なる2つの整数の最大公約数を求めるアルゴリズムである。一例として15と36の最大公約数を求める。まず、15と36のうち大きい方から小さい方を減算する。すると、36-15=21となり、21が得られる。次は15と36のうち小さい方である15と21を対象として、大きい方から小さい方を減算する。すると21-15=6となる。この処理を順に繰り返す。すると、以下のように算出できる。
(36,15)⇒(21,15)⇒(15,6)⇒(9,6)⇒(6,3)⇒(3,3)⇒(3,0)
最後に0が出てきたところでアルゴリズムは終了する。残った数の0以外の数「3」が最大公約数となる。以上が1次元ユークリッドの互除法である。
最後に0が出てきたところでアルゴリズムは終了する。残った数の0以外の数「3」が最大公約数となる。以上が1次元ユークリッドの互除法である。
次に、これを複素数に拡張する。複素数に拡張したものが、2次元ユークリッドの互除法である。対象とするのは、実部および虚部が整数の複素数(ガウス整数)が2つ有る場合に、両ガウス整数の最大公約数に対応する「基底ベクトル(もしくは既約ベクトル)」を算出する方法である。一例として、ガウス整数3+iと-1+iに2次元ユークリッドの互除法を適用する例について説明する。
まず、3+iと-1+iのノルム(絶対値)が大きいガウス整数と、+1倍、-1倍、+i倍および-i倍した小さいガウス整数を加算する(ガウス整数を-1倍、+i倍および-i倍することは、それぞれガウス整数の位相を+180度、+90度、+270度回転させることに対応する。)。
すると、
(3+i)+(+1)(-1+i)=2+2i
(3+i)+(-1)(-1+i)=4
(3+i)+(+i)(-1+i)=2
(3+i)+(-i)(-1+i)=4+2i
となる。この4つの値(2+2i、4、2、4+2i)の中で最もノルムが小さいガウス整数は2となる。次に、3+iと-1+iのノルムが小さい方と2を用いて同様の処理を繰り返す。
(3+i)+(+1)(-1+i)=2+2i
(3+i)+(-1)(-1+i)=4
(3+i)+(+i)(-1+i)=2
(3+i)+(-i)(-1+i)=4+2i
となる。この4つの値(2+2i、4、2、4+2i)の中で最もノルムが小さいガウス整数は2となる。次に、3+iと-1+iのノルムが小さい方と2を用いて同様の処理を繰り返す。
2+(+1)(-1+i)=1+i
2+(-1)(-1+i)=3-i
2+(+i)(-1+i)=1-i
2+(-i)(-1+i)=3+i
この4つの値の中で最もノルムが小さいのは1+iと1-iである。ノルムが同じものが2つ以上ある時は、どちらを選択しても良い。例えば1+iを選択したとして、-1+iと1+iで同様の処理を行うと、
(-1+i)+(+1)(1+i)=2i
(-1+i)+(-1)(1+i)=-2
(-1+i)+(+i)(1+i)=-2+2i
(-1+i)+(-i)(1+i)=0
となる(2つのガウス整数のノルムが等しい時はどちらを、+1倍、-1倍、+i倍および-i倍してもよい。)。
2+(-1)(-1+i)=3-i
2+(+i)(-1+i)=1-i
2+(-i)(-1+i)=3+i
この4つの値の中で最もノルムが小さいのは1+iと1-iである。ノルムが同じものが2つ以上ある時は、どちらを選択しても良い。例えば1+iを選択したとして、-1+iと1+iで同様の処理を行うと、
(-1+i)+(+1)(1+i)=2i
(-1+i)+(-1)(1+i)=-2
(-1+i)+(+i)(1+i)=-2+2i
(-1+i)+(-i)(1+i)=0
となる(2つのガウス整数のノルムが等しい時はどちらを、+1倍、-1倍、+i倍および-i倍してもよい。)。
よって、0が出てきたので、1+iまたは-1+iが1次元ユークリッドの互除法における最大公約数に相当するもの(「既約ベクトル」と呼ぶ。)であり、以上で2次元ユークリッドの互除法は終了となる。
本実施形態は、前に述べたように2次元ユークリッドの互除法を使ってDMRSの伝搬路推定を行うことが特徴であるが、この伝搬路推定の原理を説明する。本実施形態では基準となるDMRSは、必ずQPSK信号の各点のうち1つであるとする。
図8に、2つのDMRS(DMRS1およびDMRS2と呼ぶ。)の位置の一例を信号点平面上に示す。ここで、基地局装置は、DMRS1を3+iの位置で送信し、DMRS2が-1+iの位置で送信したとする。また本信号点平面の単位は、QPSK信号の振幅が√2となるようにする。すなわち、QPSKの各信号点は、(±1±i)の点であり、Modulo幅は4となる(便宜上、実施形態1と振幅の単位を変えている。)。また、DMRS1およびDMRS2を示す●とそれ以外の点○はすべてQPSKの信号点、およびQPSKの信号点に対して任意の摂動ベクトルが加算された点であり、図8に示したように格子点上に整列した点となっている。DMRS1は、QPSK信号の-1+iに摂動ベクトル+4が加算された信号である。
このような信号点平面において、3+iと-1+iに対して、先ほどの2次元ユークリッドの互除法を実行すれば、「最大公約数」の複素数1+iを得ることが出来る。これは、図8に示した格子点群(○および●)の最小の格子ベクトル(既約ベクトル)を算出したことを意味する。そして、この既約ベクトルルはQPSKの4点のうちいずれかに相当する。また、最初の信号がa(3+i)とa(-1+i)というように、「a」という複素数の共通因数が乗算されている場合は、既約ベクトルもa倍されて、a(1+i)という既約ベクトルを得ること出来る。
ここで、端末装置においては、DMRS1およびDMRS2は伝搬路の複素利得hが乗算されたh(3+i)とh(-1+i)である。ここで雑音は無視している。この2つの信号に対して、前述の2次元ユークリッドの互除法を適用すると既約ベクトルh(1+i)が得られる。これは、摂動ベクトルが加算されていないQPSK信号の4点のうち1点に伝搬路の複素利得が乗算された信号である。QPSKの各点はノルムが√2であることが分かっているので、伝搬路の複素利得の絶対値|h|を求めることが出来る。またarg(h)も求めることが出来るので、伝搬路の複素利得hの位相を求めることが出来る。
ただし、端末装置はDMRS伝搬路推定時に2次元ユークリッドの互除法で得た信号h(1+i)は、QPSKの4点(±1±i)のいずれにhが乗算されたものか判断できないので、仮に(1+i)とおいて位相arg(h)を求める。もし、他の3点(-1+i)、(1-i)および(-1-i)であったとしても、実際の複素利得の位相差は必ず+90度、+180度または+270度のうちいずれかとなる。
次に、DMRS1とDMRS2に対してModulo演算を行う。ここでModulo演算は、I-ch、Q-chともに同様の処理を行い、各軸に線対称な処理であって、90度の回転に対称な演算である。そのためarg(h)が90度×整数倍だけ回転しても問題無く、DMRS1とDMRS2に対してModulo演算を施すことが出来る。
この場合、Modulo演算後のDMRS1はh(1+i)に、DMRS2はh(-1+i)となる。雑音μ1、μ2を考慮すれば、DMRS1はh(1+i)+μ1、DMRS2はh(-1+i)+μ2となる。ここで端末装置は、非線形プレコーディング前、DMRS1は(1+i)、DMRS2は(-1+i)という形となっていることを知っているので、各DMRSにより、
{h(1+i)+μ1}/(1+i)=h+μ1/(1+i)
{h(-1+i)+μ2}/(-1+i)=h+μ2/(-1+i)
という形で伝搬路推定をすることができる。μ1/(1+i)とμ2/(-1+i)は伝搬路推定誤差であり、DMRS1とDMRS2の伝搬路推定結果を最大比合成することで伝搬路推定誤差を低減できる。
{h(1+i)+μ1}/(1+i)=h+μ1/(1+i)
{h(-1+i)+μ2}/(-1+i)=h+μ2/(-1+i)
という形で伝搬路推定をすることができる。μ1/(1+i)とμ2/(-1+i)は伝搬路推定誤差であり、DMRS1とDMRS2の伝搬路推定結果を最大比合成することで伝搬路推定誤差を低減できる。
ここで、注意すべきなのが、一部のDMRSの組み合わせにおいては、2次元ユークリッドの互除法によって、既約ベクトルに対応するh(±1±i)を算出することができないことがある点である。DMRSが図9のような配置になったときは、既約ベクトルが3+3iとなり、QPSKの信号点と一致しない。このような状態を回避すべく、基地局装置においても、2次元ユークリッドの互除法を用いて、図9のような場合が起こることを判断し、信号点を変えて問題のない2点を送信する。
以上が、本実施形態の2次元ユークリッド互除法部の処理の概要である。これらの処理を、2次元ユークリッドの互除法部の構成を示した図10を用いて再度説明する。前述のように、2次元ユークリッドの互除法部300は、基地局装置と端末装置との両方に存在するが、まず、端末装置の2次元ユークリッドの互除法部について説明する。
図10に示した2次元ユークリッドの互除法部300は、ベクトル保存部301、差分ベクトル算出部303、差分ベクトルノルム算出部305、収束判定部307、ノルム算出部309からなる。
(ステップS31) まず、ベクトル保存部301は、入力された2つのDMRSをノルム算出部309に入力する。ここで2つのDMRSには、基地局装置から送信されたDMRSに、伝搬路の複素利得hが乗算され、さらに雑音が加算されている。
(ステップS32) ノルム算出部309は、入力された2つのDMRSのノルムをそれぞれ算出し、各ノルムをベクトル保存部301に入力する。
(ステップS33) ベクトル保存部301は、入力された2つのDMRSと対応するノルムを差分ベクトル算出部303に入力する。
(ステップS34) 差分ベクトル算出部303は、入力された2つのベクトル(以降、2つのDMRSに対して再帰的に差分ベクトル算出部303で算出した信号を「ベクトル」と呼ぶ。)のうちノルムが大きいベクトルをaとし、小さいベクトルをbとして、c1=a+b, c2=a-b, c3=a+ib,c4=a-ibの4つのベクトルを算出し、差分ベクトルノルム算出部305に入力する。またベクトルbとベクトルbのノルムをベクトル保存部301に入力する。
(ステップS35) 差分ベクトルノルム算出部305は、入力された4つのベクトルc1~c4のノルムを算出し、最もノルムが小さいベクトルとそのベクトルに対応するノルムをベクトル保存部301に入力し、最もノルムが小さいベクトルのノルムを収束判定部307に入力する。
(ステップS36) 収束判定部307は、入力されたノルムと所定の正の数Tとの大小関係を比較する。Tよりノルムが大きい場合、入力されたノルムとベクトルをベクトル保存部301に入力する。Tよりノルムが小さい場合、ベクトル保存部301に、2次元のユークリッドの互除法が終了したことを示す情報を入力する。
ここで、前述の2次元ユークリッド互除法の原理のように、ノルムが0になったときを収束条件としないのは、端末装置側では、DMRSが雑音を含むことから、最終的に、収束判定部307のノルムが0にならないからである。しかし、雑音は、DMRSよりも通常小さいので、所定の定数Tを用いて、ノルムがTより小さくなったときに収束したと判定する。
Tの値は、次の2つの要素のトレードオフで、事前にコンピュータシミュレーションによってあらかじめ決定しておく。
1)Tが大きくなると、収束判定条件が緩くなり、雑音による誤差が無い時に0でないのに収束していると判定してしまう確率が上昇する。
2)Tが小さくなると、収束判定条件が厳しくなり、雑音による誤差のために、収束したと判定すべきであるにもかかわらず、まだ収束していないと判定してしまうことがある。
そのため、この2つの要素のトレードオフで事前に決めておく。
(ステップS37) ベクトル保存部301は、
1)差分ベクトル算出部303から入力されたベクトルと対応するノルム、
2)差分ベクトルノルム算出部305から入力されたベクトルと対応するノルム
の2つを差分ベクトル算出部303に入力し、再びステップS34から処理を繰り返す。
1)差分ベクトル算出部303から入力されたベクトルと対応するノルム、
2)差分ベクトルノルム算出部305から入力されたベクトルと対応するノルム
の2つを差分ベクトル算出部303に入力し、再びステップS34から処理を繰り返す。
(ステップS38) ベクトル保存部301は、収束判定部307から、2次元のユークリッドの互除法が終了したことを示す情報が入力された場合、ベクトルb(既約ベクトル)を出力する。
また、基地局装置における2次元ユークリッドの互除法部300は、DMRSに対して伝搬路の複素利得hが乗算されておらず、雑音も加算されていないので収束判定部307は判定条件としているT=0とする。
<DMRS補正部a226詳細>
次に、基地局装置A2において2次元ユークリッドの互除法を行うDMRS補正部a226の詳細な構成と動作を説明する。図11は、DMRS補正部a226の構成を示したものである。DMRS補正部a226は、2次元ユークリッドの互除法部300、既約ベクトル確認部320、および摂動ベクトル加算部340、からなる。
次に、基地局装置A2において2次元ユークリッドの互除法を行うDMRS補正部a226の詳細な構成と動作を説明する。図11は、DMRS補正部a226の構成を示したものである。DMRS補正部a226は、2次元ユークリッドの互除法部300、既約ベクトル確認部320、および摂動ベクトル加算部340、からなる。
このDMRS補正部a226は、前述の、既約ベクトルが最小の格子ベクトルと一致しない問題を、基地局装置A2で処理することで、あらかじめ回避することを目的とする。
DMRS補正部a226は、まず非線形プレコーディング部a13から摂動ベクトルが加算されたDMRSを取得する。ここで、DMRS補正部a226が取得するDMRSは、摂動ベクトルが加算されている。フィルタWを加算する前の信号(q+z1τ+iz2τ)とする。また、取得するDMRSは1度に2つであり、この2つは、あらかじめ2つずつ対になっており、どの2つを対にするかは基地局装置A2と端末装置B2nとで既知である。
次に2次元ユークリッドの互除法部300が、この2つのDMRSに対して2次元ユークリッドの互除法を適用して得た既約ベクトル(「d」とおく。)と非線形プレコーディング部a13から取得した2つのDMRSを既約ベクトル確認部320に入力する。
既約ベクトル確認部320は、既約ベクトルdが摂動ベクトル加算前のDMRS信号qすなわちQPSK信号のうちの1つ(±1±i)であれば、非線形プレコーディング部a13から取得した2つのDMRSを再び非線形プレコーディング部a13に入力する。
一方、既約ベクトル確認部320は、既約ベクトルdが摂動ベクトル加算前のDMRSすなわちQPSK信号のうちの1つ(±1±i)でない場合、非線形プレコーディング部a13から取得したDMRSを2つとも摂動ベクトル加算部340に入力する。
摂動ベクトル加算部340は、非線形プレコーディング部a13から取得したDMRSのうちどちらか一方に対して摂動ベクトルτ(または-τ、iτ、-iτ)を加算する。ここで、どの摂動ベクトルτをどちらのDMRSに加算するかは、乱数などを用いてランダムに選択する。摂動ベクトル加算部340は、摂動ベクトルを加算したDMRSを含む2つのDMRSを再び2次元ユークリッド互除法部300に入力する。
2次元ユークリッド互除法部300は、新たなDMRSを用いて再び2次元ユークリッドの互除法を行う。以降、既約ベクトル確認部320が、既約ベクトルdが摂動ベクトル加算前のDMRSすなわちQPSK信号のうちの1つ(±1±i)であると判定するまで、2次元ユークリッドの互除法部300、既約ベクトル確認部320、摂動ベクトル加算部340の処理を続ける。
最終的に、既約ベクトル確認部320が、補正後のDMRSを2つ出力し、非線形プレコーディング部a13に入力する。
また、非線形プレコーディング部a13は、DMRS補正部a226でDMRSが補正された場合、新たに摂動ベクトルを探索することなく、当該DMRSにフィルタWを乗算し、電力正規化係数gの逆数g-1を乗算する。
<DMRS伝搬路推定部b107詳細>
次に、端末装置b2に係るDMRS伝搬路推定部b12の詳細な構成と動作とを説明する。図12(a)は、DMRS伝搬路推定部b12の詳細な構成を示したものである。DMRS伝搬路推定部b12は、2次元ユークリッドの互除法部300と複素利得算出部350から構成される。
次に、端末装置b2に係るDMRS伝搬路推定部b12の詳細な構成と動作とを説明する。図12(a)は、DMRS伝搬路推定部b12の詳細な構成を示したものである。DMRS伝搬路推定部b12は、2次元ユークリッドの互除法部300と複素利得算出部350から構成される。
また複素利得算出部350は,図12(b)に示したように、内部に仮複素利得算出部351、DMRS伝搬路補償部352、DMRS-Modulo部353、およびベクトル除算部354を有する。
まず、DMRS伝搬路推定部b12は、端末装置B2nが受信した2つのDMRSを取得する。この2つは、基地局装置におけるDMRS補正部a226でも説明した対となるDMRS(ここではp1とp2とおく。)である。
この2つのDMRSに対して2次元ユークリッドの互除法部300で2次元ユークリッドの互除法を行い、既約ベクトルpredを算出する。なお、既約ベクトルpredは、複素利得hが乗算されているため、DMRS補正部a226で算出した既約ベクトルdとは異なる。ここで前述のように、既約ベクトルpredは、摂動ベクトルが加算されていないQPSK信号の4点のうち1点に伝搬路の複素利得hが乗算され、さらに雑音による誤差を加算した信号である。
仮複素利得算出部351は、この既約ベクトルpredが、QPSK信号の4点のうち(1+i)に複素利得が乗算されたものと仮定して、位相θ( =arg(pred/(1+i)) )を求める(前述のように、もし、他の(-1+i)、(1-i)および(-1-i)であったとしても、実際の複素利得の位相差は必ず+90度、-90度または+180度となる。)。QPSKの各点はノルムが√2であることが分かっているので、伝搬路の複素利得の絶対値|h|(=pred/√2)も求めることが出来る。仮複素利得算出部351は、ここで算出した伝搬路の複素利得の絶対値|h|と位相θ( =arg(pred/(1+i)) )をDMRS伝搬路補償部352に入力する。
DMRS伝搬路補償部352は、入力された伝搬路の複素利得の絶対値|h|と位相θとを用いて各DMRSp1とp2の伝搬路補償を行う。具体的には、DMRSの振幅を1/|h|倍し、位相を-θだけ回転する。つまり、
q1=p1/|h|×exp(-2πiθ)
q2=p2/|h|×exp(-2πiθ)
とする。DMRS伝搬路補償部352は、伝搬路補償後のDMRSq1とq2、伝搬路の複素利得の絶対値|h|、および位相θをDMRS-Modulo部353に入力する。
q1=p1/|h|×exp(-2πiθ)
q2=p2/|h|×exp(-2πiθ)
とする。DMRS伝搬路補償部352は、伝搬路補償後のDMRSq1とq2、伝搬路の複素利得の絶対値|h|、および位相θをDMRS-Modulo部353に入力する。
DMRS-Modulo部353は、入力された伝搬路補償後の各DMRSq1とq2に対してModulo演算を行って信号e1、e2を算出する。DMRSは振幅・位相ともに伝搬路補償されているため、通常のQPSK信号に対応するModulo幅τ(=2√2)を用いたModulo演算を行うことができる。DMRS-Modulo部353はModulo演算を行った信号e1、e2に対して、DMRS伝搬路補償部352から入力された複素利得の絶対値|h|と位相θを用いて、信号pmod1( =|h|×e1×exp(2πiθ) )およびpmod2( =|h|×e2×exp(2πiθ) )を算出する。その後信号pmod1とpmod2をベクトル除算部354に入力する。
ベクトル除算部354は、信号pmod1とpmod2を、端末装置が受信したDMRSをあらかじめ端末装置が把握している各DMRSの基準信号q(すなわち基地局装置で摂動ベクトルが加算される前のDMRSの信号点であり、ここではQPSKの信号点4点のうちいずれか1つ。)で除算することで伝搬路の複素利得h(=pmod1/qまたはpmod2/q)を推定する。ここでDMRSが2つあるため、同じ伝搬路の複素利得hに対する推定値が2つ得られるが、最大比合成することで雑音の影響による誤差を抑えてもよい。ベクトル除算部354は、推定した伝搬路の複素利得hを、伝搬路補償部b106に入力する。
<効果>
本実施形態に示したように基地局装置A2と端末装置B2nでそれぞれ2次元ユークリッド互除法に基づく処理を行うことにより、比較的少ない端末装置B2nの演算量によってDMRSをNLP MU-MIMOによる空間多重することが可能となる。これによりDMRSを挿入することによるオーバーヘッドを低減することが可能となる。
本実施形態に示したように基地局装置A2と端末装置B2nでそれぞれ2次元ユークリッド互除法に基づく処理を行うことにより、比較的少ない端末装置B2nの演算量によってDMRSをNLP MU-MIMOによる空間多重することが可能となる。これによりDMRSを挿入することによるオーバーヘッドを低減することが可能となる。
(第3の実施形態: VP⇒THPなど)
第1の実施形態、第2実施形態に係る基地局装置B1n、B2nは、いずれも非線形プレコーディング部a13およびフィルタ算出部a11でVPを行っていた。本実施形態は、VPより演算量の低いTHPを用いた方式である。本実施形態に係る基地局装置を基地局装置A3とし、本実施形態に係る端末装置を端末装置B31~B3Nと呼び、任意の1つを端末装置B3nと呼ぶ。
第1の実施形態、第2実施形態に係る基地局装置B1n、B2nは、いずれも非線形プレコーディング部a13およびフィルタ算出部a11でVPを行っていた。本実施形態は、VPより演算量の低いTHPを用いた方式である。本実施形態に係る基地局装置を基地局装置A3とし、本実施形態に係る端末装置を端末装置B31~B3Nと呼び、任意の1つを端末装置B3nと呼ぶ。
本実施形態に係る非線形プレコーディング部を非線形プレコーディング部a33と呼び、本実施形態に係るフィルタ算出部をフィルタ算出部a31と呼ぶ。
まず、フィルタ算出部a31では、実施形態1と同じ伝搬路行列Hを算出した後、HをQR分解する。
HH=QR
(3-1)
ここでRは上三角行列、Qはユニタリ行列である。またHを行列の共役転置とする。RHの対角成分だけ取り出した対角行列をAとおく。AとQを用いて線形フィルタP0を下式により算出する。
(3-1)
ここでRは上三角行列、Qはユニタリ行列である。またHを行列の共役転置とする。RHの対角成分だけ取り出した対角行列をAとおく。AとQを用いて線形フィルタP0を下式により算出する。
P0=QA-1
(3-2)
また、AとRを用いて干渉係数フィルタFを下式により算出する。
(3-2)
また、AとRを用いて干渉係数フィルタFを下式により算出する。
F=RHA-1-I
(3-3)
ここで、IはN行N列の単位行列とする。最後に、フィルタ算出部a31は線形フィルタP0と干渉係数フィルタFを非線形プレコーディング部a33に入力する。
(3-3)
ここで、IはN行N列の単位行列とする。最後に、フィルタ算出部a31は線形フィルタP0と干渉係数フィルタFを非線形プレコーディング部a33に入力する。
なお、電力正規化を行うために、フィルタ算出部a31で、
g=trace{((P0CvP0 H)/Ptr)1/2}
(3-4)
g={trace((P0CvP0 H)/Ptr)}1/2
により電力正規化係数gを算出する。ここで、Psを変調信号の平均電力、PvをModulo演算後のデータ信号の平均電力とすると、Cvは対角成分が左上から順に
[Ps,Pv,Pv,…Pv]
(3-5)
となる対角行列である。なお、PvはModulo幅τによって変化し、Ps=1とすると、QPSK(τ=2√2)では4/3、16QAM(τ=8/√10)では16/15、64QAM(τ=16/√42)では64/63となる。これは、Modulo演算後のデータ信号が原点を中心とするModulo幅の範囲に、一様分布することを利用したものである。フィルタ算出部a31は、式(3-2)で算出した線形フィルタP0にg-1を乗算した行列を新たに線形フィルタPとして非線形プレコーディング部a33に入力する。このときは第1の実施形態に示したような電力の正規化は行わない。
g=trace{((P0CvP0 H)/Ptr)1/2}
(3-4)
g={trace((P0CvP0 H)/Ptr)}1/2
により電力正規化係数gを算出する。ここで、Psを変調信号の平均電力、PvをModulo演算後のデータ信号の平均電力とすると、Cvは対角成分が左上から順に
[Ps,Pv,Pv,…Pv]
(3-5)
となる対角行列である。なお、PvはModulo幅τによって変化し、Ps=1とすると、QPSK(τ=2√2)では4/3、16QAM(τ=8/√10)では16/15、64QAM(τ=16/√42)では64/63となる。これは、Modulo演算後のデータ信号が原点を中心とするModulo幅の範囲に、一様分布することを利用したものである。フィルタ算出部a31は、式(3-2)で算出した線形フィルタP0にg-1を乗算した行列を新たに線形フィルタPとして非線形プレコーディング部a33に入力する。このときは第1の実施形態に示したような電力の正規化は行わない。
非線形プレコーディング部a33の構成を、図13に、その動作を示すフローチャートを図14に示した。以下、順番に非線形プレコーディング部a33内の動作を説明する。
(ステップS1) 干渉算出部a131と線形フィルタ乗算部a134は、それぞれ干渉係数フィルタFと線形フィルタPとをフィルタ算出部a31から取得する。
(ステップS2) 送信信号を計算中の端末装置の番号を示す番号nに1を代入する。
(ステップS2) 送信信号を計算中の端末装置の番号を示す番号nに1を代入する。
(ステップS3) 端末装置B31宛の固有信号s1をv1とおく。
(ステップS4) nにn+1を代入する。すなわちn=2とする。
(ステップS5) 干渉算出部a131は、v1を用いて端末装置B32が受ける干渉信号f2を下式により算出する。
f2=F(2,1)*v1
(3-6)
ここで、F(p,q)は行列Fの2行1列成分を表す。
(3-6)
ここで、F(p,q)は行列Fの2行1列成分を表す。
(ステップS6) 干渉減算部a133-2は端末装置B32宛の固有信号s2からf2を減算し、信号s2-f2を算出する。
(ステップS7) 第1のModulo演算部a132-2がs2-f2に対してModulo演算を適用し、信号v2を算出する。
(ステップS8) n=2なので、ステップS4から再び次の端末装置B33宛の信号の演算(ステップS4~ステップS7)を行う。
以降、ステップS4~S8の処理をn=Nになるまで繰り返すので、一例としてn番目の端末装置B3n宛の信号を算出する処理を説明する。
(ステップS4) nの値を1増やす。
(ステップS5) 干渉算出部a131はv1~v(n-1)を用いて端末装置nが受ける干渉信号fnを下式により算出する。
fn=F(n,1:n-1)*[v1,v2,...,v(n-1)]t
(3-7)
ここで、F(n,1:n-1)は、行列Fのn行目の1~n-1列目の成分を示す横ベクトルを示す。
(3-7)
ここで、F(n,1:n-1)は、行列Fのn行目の1~n-1列目の成分を示す横ベクトルを示す。
(ステップS6) 第nの干渉減算部a133-nは、第nの端末装置B3n宛の固有信号snからfnを減算し、信号sn-fnを算出する。
(ステップS7) Modulo演算部a132-nが、sn-fnに対してModulo演算を適用し、信号vnを算出する。このModulo演算によって各端末装置宛の送信信号電力を低減する。
(ステップS8) n<Nのときは、再びステップS4を行う。またn=NのときはステップS9に進む。
(ステップS9) 信号v=(v1,v2,...,vN)tに線形フィルタPを乗算して得た信号をxとおく。ここで第1の実施形態と同様に信号xの各成分は、順番に各アンテナa101-1~a101-Nで送信する送信信号である。この信号xをフレーム構成部a142に入力する。
THPは、VPと同様に摂動ベクトル探索アルゴリズムと考えることが出来ることを説明する。ただし、THPの場合は、真に最適な摂動ベクトルを探索するアルゴリズムではなく,VPと比較して少量の演算量で準最適な摂動べクトルを探索するアルゴリズムである。
まず、非線形プレコーディング部a33のModulo演算部a132-2~a132-Nが無いものと仮定して信号を演算すると、電力の正規化係数が1であるとすれば、非線形プレコーディング部a33は、
x=P0(I+F)-1s
(3-8)
という演算を行っている。ここでP0とFに式(3-2)と(3-3)を代入すると、
x=QA-1{I+(RHA-1-I)}-1s
=QA-1(RHA-1)-1s
=Q(RH)-1s=(RHQH)-1s{(QR)H}-1s
={(HH)H}-1s =H-1s=Ws
(3-9)
x=QA-1{I+(RHA-1-I)}-1s
=QA-1(RHA-1)-1s
=Q(RH)-1s=(RHQH)-1s={(QR)H}-1s
={(HH)H}-1s=H-1s=Ws
となり、式(1-2)において(z1,z2)=(0,0)とした場合に対応する。
x=P0(I+F)-1s
(3-8)
という演算を行っている。ここでP0とFに式(3-2)と(3-3)を代入すると、
x=QA-1{I+(RHA-1-I)}-1s
=QA-1(RHA-1)-1s
=Q(RH)-1s=(RHQH)-1s{(QR)H}-1s
={(HH)H}-1s =H-1s=Ws
(3-9)
x=QA-1{I+(RHA-1-I)}-1s
=QA-1(RHA-1)-1s
=Q(RH)-1s=(RHQH)-1s={(QR)H}-1s
={(HH)H}-1s=H-1s=Ws
となり、式(1-2)において(z1,z2)=(0,0)とした場合に対応する。
さらに、Modulo演算部s132-2~s132-Nは、固有信号sにModulo幅の整数倍の信号をI-ch又はQ-chに加算する処理である。そのため、本実施形態に係る非線形プレコーディング部a33で算出した信号xもx=W(s+z1τ+iz2τ)という式で表すことが出来る。非線形プレコーディング部a33で算出した信号xは必ずしも式(1-2)で表される最適な摂動ベクトルを加算した信号ではないが、Modulo演算による電力抑圧を行っているため準最適な信号xとなり、Modulo演算を行わない場合Wsと比較して必ずノルムが小さくなる。
以上、説明したようなアルゴリズムで信号xを算出することで、第1の実施形態のVPのように、候補となる摂動ベクトルを全探索する必要が無くなるため、演算量を低減することが出来る。これによりNLP MU-MIMOシステムにおいてDMRSを空間多重してDMRS挿入によるオーバーヘッドの増加を最小限に抑えながら、端末装置において正常にデータ信号の複素利得を推定することが可能になる。
なお、ここではTHPを用いた準最適な摂動ベクトル探索アルゴリズムを用いる場合について説明したが、オーダリングを用いたTHP、又はLR-THPでも同様に適用可能である。
上記の実施の形態において、添付図面に図示されている構成等については、これらに限定されるものではなく、本発明の効果を発揮する範囲内で適宜変更することが可能である。その他、本発明の目的の範囲を逸脱しない限りにおいて適宜変更して実施することが可能である。
また、本実施の形態で説明した機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することにより各部の処理を行ってもよい。尚、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。
また、「コンピュータシステム」は、WWWシステムを利用している場合であれば、ホームページ提供環境(あるいは表示環境)も含むものとする。
また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD-ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時間の間、動的にプログラムを保持するもの、その場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時間プログラムを保持しているものも含むものとする。また前記プログラムは、前述した機能の一部を実現するためのものであっても良く、さらに前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるものであっても良い。
本発明は、通信装置に利用可能である。
A1…基地局装置、B11~B14…端末装置、a11…フィルタ算出部、a13…非線形プレコーディング部、a31…フィルタ算出部、a33…非線形プリコーディング部、a101…アンテナ、a102…受信部、a103…GI除去部、a104…FFT部、a105…伝搬路状態情報取得部、a121…符号化部、a122…変調部、a124…DRMS生成部、a125…固有信号構成部、a133…干渉減算部、a132…Modulo演算部、a134…線形フィルタ乗算部、a141…CRS生成部、a142…フレーム構成部、a143…IFFT部、a144…GI挿入部、a145…送信部、a226…CRS補正部、b12…DMRS用伝搬路推定部、b101…アンテナ、b102…受信部、b103…GI除去部、b104…FFT部、b105…信号分離部、b106…伝搬路補償部、b107…CRS用伝搬路推定部、b108…伝搬路状態情報生成部、b109…Modulo演算部、b110…復調部、b111…復号部、b121…摂動ベクトル候補選択部、b122…摂動ベクトル加算部、b123…仮伝搬路推定部、b124…伝搬路補償部、b125…Modulo演算部、b126…復調部、b127…摂動ベクトル評価値算出部、b128…摂動ベクトル推定部、b131…IFFT部、b132…GI挿入部、b133…送信部、300…2次元ユークリッドの互除去部、301…ベクトル保存部、303…差分ベクトル算出部、305…差分ベクトルノルム算出部、307…収束判定部、309…ノルム算出部、320…既約ベクトル確認部、340…摂動ベクトル加算部、350…複素利得算出部、351…仮複素利得算出部、352…DMRS伝搬路補償部、353…DMRS-Modulo部、354…ベクトル除算部。
本明細書で引用した全ての刊行物、特許および特許出願をそのまま参考として本明細書にとり入れるものとする。
Claims (18)
- 複数の受信装置に対して同一時刻・同一周波数でデータ信号を送信する送信装置であって、
第1の受信装置宛の復調用参照信号と、前記第1の受信装置とは異なる第2の受信装置宛の復調用参照信号とを、同一時刻・同一周波数で送信する送信部、
を有することを特徴とする送信装置。 - 前記復調用参照信号に対して、あらかじめ決めた所定の信号の整数倍の信号を加算する非線形プレコーディング部を有することを特徴とする請求項1に記載の送信装置。
- 前記復調用参照信号に対して、非線形プレコーディングを施す非線形プレコーディング部を有することを特徴とする請求項1または請求項2に記載の送信装置。
- 前記送信部は、
同一時刻・同一周波数で複数のデータ信号を送信し、
前記非線形プレコーディング部は、
前記復調用参照信号と、前記データ信号とに、同じ非線形プレコーディング処理することを特徴とする請求項3に記載の送信装置。 - 前記非線形プレコーディング部は、
前記復調用参照信号と、前記データ信号とに、同じ電力の正規化を施すことを特徴とする請求項4に記載の送信装置。 - 復調用参照信号を補正するDMRS補正部を有することを特徴とする請求項1から5までのいずれか1項に記載の送信装置。
- 前記DMRS補正部は、
前記復調用参照信号に2次元ユークリッド互除法を適用する2次元ユークリッド互除法部を有することを特徴とする請求項6に記載の送信装置。 - 前記2次元ユークリッド互除法部は、
第1の前記復調用参照信号から、
第2の前記復調用参照信号、第2の前記復調用参照信号の位相を90度回転させた信号、第2の前記復調用参照信号の位相を180度回転させた信号、および第2の前記復調用参照信号の位相を270度回転させた信号を減算する差分ベクトル算出部を有することを特徴とする請求項7に記載の送信装置。 - 復調用参照信号にあらかじめ決めた所定の幅の整数倍の信号を加算する摂動ベクトル加算部を有することを特徴とする受信装置。
- 前記信号を加算した復調用参照信号を用いて伝搬路推定する仮伝搬路推定部を有することを特徴とする請求項9に記載の受信装置。
- 複数の異なる前記信号を選択する摂動ベクトル候補選択部と、
前記信号それぞれを用いて前記仮伝搬路推定部で伝搬路推定した伝搬路推定結果に基づいて、1つの前記信号を選択する摂動ベクトル推定部を有することを特徴とする請求項10に記載の受信装置。 - 複数の異なる前記信号に対応する前記伝搬路推定結果それぞれに基づいてデータ信号を軟推定して対数尤度比をそれぞれ算出する復調部と、
前記対数尤度比それぞれの分散を算出する摂動ベクトル評価値算出部と、
を有し、
前記摂動ベクトル推定部は、前記分散のうち最も大きいものに対応する前記信号を選択することを特徴とする請求項10に記載の受信装置。 - (追加)
複数の前記復調用参照信号に対して2次元ユークリッドの互除法を適用し、既約ベクトルを算出する2次元ユークリッドの互除法部を有することを特徴とする請求項9に記載の受信装置 - 前記既約ベクトルを用いて伝搬路の複素利得を算出する複素利得算出部を有する請求項13に記載の受信装置。
- 復調用参照信号に対して、あらかじめ決めた所定の信号の整数倍の信号を加算する非線形プレコーディング部と、復調用参照信号と他の信号を、同一時刻・同一周波数で送信する送信部とを有する送信装置と、
復調用参照信号にあらかじめ決めた所定の幅の整数倍の信号を加算する摂動ベクトル加算部を有する受信装置と、
を有することを特徴とする通信システム。 - 復調用参照信号に対して、あらかじめ決めた所定の信号の整数倍の信号を加算するステップと、復調用参照信号と他の信号を、同一時刻・同一周波数で送信するステップを有する送信方法と、
復調用参照信号にあらかじめ決めた所定の幅の整数倍の信号を加算するステップを有する受信方法と、
を有することを特徴とする通信方法。 - 復調用参照信号に対して、あらかじめ決めた所定の信号の整数倍の信号を加算する非線形プレコーディング部と、復調用参照信号と他の信号を、同一時刻・同一周波数で送信する送信部と、
を有することを特徴とする集積回路。 - 復調用参照信号に、あらかじめ決めた所定の幅の整数倍の信号を加算する摂動ベクトル加算部を有することを特徴とする集積回路。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/002,142 US9362995B2 (en) | 2011-03-01 | 2012-01-30 | Transmitter apparatus, receiver apparatus, communication system, communication method, and integrated circuit |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011-043755 | 2011-03-01 | ||
| JP2011043755A JP5687524B2 (ja) | 2011-03-01 | 2011-03-01 | 送信装置、受信装置、通信システム、通信方法、および集積回路 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2012117788A1 true WO2012117788A1 (ja) | 2012-09-07 |
Family
ID=46757729
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2012/051923 WO2012117788A1 (ja) | 2011-03-01 | 2012-01-30 | 送信装置、受信装置、通信システム、通信方法、および集積回路 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9362995B2 (ja) |
| JP (1) | JP5687524B2 (ja) |
| WO (1) | WO2012117788A1 (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103229532B (zh) * | 2011-02-25 | 2016-04-20 | 夏普株式会社 | 无线通信系统、基站装置以及无线通信路径选择方法 |
| JP5804594B2 (ja) * | 2011-08-05 | 2015-11-04 | シャープ株式会社 | プリコーディング装置、プリコーディング用プログラムおよび集積回路 |
| US20160127058A1 (en) * | 2013-06-07 | 2016-05-05 | Hewlett-Packard Development Company, L.P. | Target channel identification for a wireless communication |
| JP6405155B2 (ja) * | 2014-08-27 | 2018-10-17 | 三星電子株式会社Samsung Electronics Co.,Ltd. | 信号処理装置、信号処理方法、及びプログラム |
| EP3214782B1 (en) * | 2014-11-25 | 2019-11-13 | Huawei Technologies Co., Ltd. | Method and apparatus for generating pilot frequency signal |
| CN111884957B (zh) * | 2015-01-28 | 2023-05-16 | 索尼公司 | 无线通信设备和无线通信方法 |
| CN107836089B (zh) * | 2015-04-15 | 2021-05-11 | 梁平 | 混合波束成形多天线无线系统 |
| WO2017034105A1 (ko) * | 2015-08-24 | 2017-03-02 | 엘지전자 주식회사 | Dmrs를 전송하는 방법 및 이를 위한 장치 |
| US10778500B2 (en) * | 2016-06-27 | 2020-09-15 | Lg Electronics Inc. | Method for transmitting and receiving reference signal in wireless communication system and device therefor |
| JP2020010072A (ja) | 2016-11-02 | 2020-01-16 | シャープ株式会社 | 基地局装置、端末装置および通信方法 |
| WO2018128399A1 (ko) | 2017-01-09 | 2018-07-12 | 엘지전자 주식회사 | 무선 통신 시스템에서, 참조 신호를 전송하는 방법 및 이를 위한 장치 |
| WO2018171783A1 (zh) * | 2017-03-24 | 2018-09-27 | 华为技术有限公司 | 信号传输方法、装置及系统 |
| CN108632005B (zh) | 2017-03-24 | 2023-12-15 | 华为技术有限公司 | 一种参考信号传输方法、装置及系统 |
| WO2019215874A1 (ja) * | 2018-05-10 | 2019-11-14 | 株式会社Nttドコモ | 受信装置及び送信装置 |
| CN110784292B (zh) * | 2018-07-31 | 2021-10-01 | 华为技术有限公司 | 参考信号的处理方法和装置 |
| US11956006B2 (en) * | 2022-07-01 | 2024-04-09 | Qualcomm Incorporated | Precoding perturbation to allow large array digital post distortion |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009182894A (ja) * | 2008-01-31 | 2009-08-13 | Toshiba Corp | 無線送信方法及び装置 |
| WO2010053059A1 (ja) * | 2008-11-05 | 2010-05-14 | 株式会社 東芝 | 無線通信装置及び方法 |
| WO2010150313A1 (ja) * | 2009-06-25 | 2010-12-29 | 株式会社 東芝 | 通信装置 |
| WO2011108319A1 (ja) * | 2010-03-01 | 2011-09-09 | シャープ株式会社 | 通信システム、送信装置、受信装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8139685B2 (en) * | 2005-05-10 | 2012-03-20 | Qualcomm Incorporated | Systems, methods, and apparatus for frequency control |
| JP4695003B2 (ja) * | 2005-09-05 | 2011-06-08 | Okiセミコンダクタ株式会社 | 等化器及び等化方法 |
| US9094167B2 (en) * | 2009-02-02 | 2015-07-28 | Samsung Electronics Co., Ltd. | System and method for multi-user and multi-cell MIMO transmissions |
| EP2453593B1 (en) * | 2009-06-19 | 2018-08-15 | BlackBerry Limited | Downlink reference signal for type II relay |
| JP2011254171A (ja) * | 2010-05-31 | 2011-12-15 | Sharp Corp | 通信システム、送信装置、送信制御方法、送信制御プログラム、及びプロセッサ |
-
2011
- 2011-03-01 JP JP2011043755A patent/JP5687524B2/ja not_active Expired - Fee Related
-
2012
- 2012-01-30 US US14/002,142 patent/US9362995B2/en active Active
- 2012-01-30 WO PCT/JP2012/051923 patent/WO2012117788A1/ja active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009182894A (ja) * | 2008-01-31 | 2009-08-13 | Toshiba Corp | 無線送信方法及び装置 |
| WO2010053059A1 (ja) * | 2008-11-05 | 2010-05-14 | 株式会社 東芝 | 無線通信装置及び方法 |
| WO2010150313A1 (ja) * | 2009-06-25 | 2010-12-29 | 株式会社 東芝 | 通信装置 |
| WO2011108319A1 (ja) * | 2010-03-01 | 2011-09-09 | シャープ株式会社 | 通信システム、送信装置、受信装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20130336282A1 (en) | 2013-12-19 |
| JP5687524B2 (ja) | 2015-03-18 |
| JP2012182627A (ja) | 2012-09-20 |
| US9362995B2 (en) | 2016-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5687524B2 (ja) | 送信装置、受信装置、通信システム、通信方法、および集積回路 | |
| JP5686427B2 (ja) | 送信装置、受信装置、無線通信システム、送信制御方法、受信制御方法、及び、プロセッサ | |
| JP4702883B2 (ja) | 送信装置、受信装置、mimo−ofdm通信システム及びmimo−ofdm通信システムにおけるiqインバランス補償方法 | |
| RU2742820C1 (ru) | Передающее устройство, приемное устройство, способ передачи и способ приема | |
| JP5221285B2 (ja) | 無線通信装置及び方法 | |
| JP5689353B2 (ja) | フィルタ算出装置、送信装置、受信装置、プロセッサおよびフィルタ算出方法 | |
| JP5908307B2 (ja) | プリコーディング装置、無線送信装置、無線受信装置、無線通信システムおよび集積回路 | |
| WO2011040258A1 (ja) | 無線通信システム、通信装置、無線通信方法および端末装置 | |
| WO2012060177A1 (ja) | 基地局装置、移動局装置及びそれらを用いた無線通信システム | |
| JP2012070366A (ja) | 送信装置、受信装置、中継装置、通信システム、送信方法、受信方法、中継方法、通信方法、コンピュータプログラムおよび半導体チップ | |
| US20130003641A1 (en) | Communication system, transmitter and receiver | |
| CN103997473B (zh) | 一种信号干扰的滤波方法及相关装置 | |
| JP2010502140A (ja) | 等化構造及び等化方法 | |
| US20130343320A1 (en) | Terminal device, base station device, and wireless communication system | |
| JP2013030940A (ja) | 送信装置、受信装置、および通信システム | |
| JP6159839B1 (ja) | 基地局装置 | |
| CN102377719A (zh) | 数据符号正交处理方法及装置 | |
| JP5557543B2 (ja) | 無線通信システム、送信装置、受信装置、受信制御方法、及び、受信制御プログラム | |
| WO2013018466A1 (ja) | 受信装置、プログラムおよび集積回路 | |
| JP6484205B2 (ja) | 基地局装置、摂動ベクトル探索方法及びプログラム | |
| JP2012105146A (ja) | 端末装置、基地局装置、通信システム、通信方法、及びプロセッサ | |
| JP2010246095A (ja) | 送信ウェイト決定方法 | |
| JP5676221B2 (ja) | 送信装置、通信システム、通信方法、プロセッサ | |
| RU2777352C2 (ru) | Передающее устройство, приемное устройство, способ передачи и способ приема |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 12752992 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14002142 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 12752992 Country of ref document: EP Kind code of ref document: A1 |