WO2010116912A1 - トラッキング装置およびこのトラッキング装置を備えたトラッキング顕微鏡並びにトラッキング方法 - Google Patents
トラッキング装置およびこのトラッキング装置を備えたトラッキング顕微鏡並びにトラッキング方法 Download PDFInfo
- Publication number
- WO2010116912A1 WO2010116912A1 PCT/JP2010/055514 JP2010055514W WO2010116912A1 WO 2010116912 A1 WO2010116912 A1 WO 2010116912A1 JP 2010055514 W JP2010055514 W JP 2010055514W WO 2010116912 A1 WO2010116912 A1 WO 2010116912A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- tracking
- target
- imaged
- preparation
- imaging
- Prior art date
Links
Images








Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/34—Microscope slides, e.g. mounting specimens on microscope slides
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B3/00—Simple or compound lenses
- G02B3/12—Fluid-filled or evacuated lenses
- G02B3/14—Fluid-filled or evacuated lenses of variable focal length
Definitions
- the present invention relates to a tracking microscope including a tracking device that tracks a captured moving object by performing visual feedback on the image of the captured moving object.
- a conventional tracking microscope is a tracking microscope equipped with a tracking device for tracking (two-dimensional tracking) a moving object (microorganism) by visual feedback (Visual Feedback) (hereinafter referred to as “conventional tracking microscope” as appropriate).
- Visual Feedback Visual Feedback
- a general microscope is a very important instrument for observing the movement of microorganisms with sufficient resolution. However, even with such a microscope, there is a problem that it is very difficult to continuously observe the moving microorganisms because the field of view is limited.
- Non-Patent Document 2 See Non-Patent Document 2 and Non-Patent Document 3.
- the conventional tracking microscope performs two-dimensional tracking as described above, three-dimensional tracking is also possible by moving the movable stage and the objective lens up and down (see Non-Patent Documents 4 and 5).
- Non-Patent Documents 6 and 7 show the configuration of a drive unit for periodically expanding and contracting the shape of a piezoelectric element (piezo element) whose shape changes according to an applied voltage.
- the non-moving object looks more stable for the tracking device than the moving object. There was a risk of becoming.
- the tracking device at the moment when the microorganism being tracked disappears from the field of view, recognizes dust as a new tracking target instead, and continues the state as it is.
- a typical example of tracking failure is to track a non-moving object (tracking in a stationary state) without tracking the moving object that is the original target.
- the provision of a tracking device or a tracking microscope in which a tracking failure is difficult to occur is a first problem to be solved by the present invention.
- the fixing mechanism for fixing the preparation to the movable stage has a structure that is solid and difficult to attach and detach, and tends to be unusable.
- the tracking device or the tracking microscope it is a second problem to be solved by the present invention to prevent a blurred image caused by a deviation from the focal plane of the preparation or being out of focus while maintaining usability. .
- the movable stage is moved by a tracking device provided in the tracking microscope.
- a tracking device provided in the tracking microscope.
- Various field experiments are required for the development of the tracking device, but according to the conventional tracking device, it is necessary to prepare an observation object that is actually alive.
- preparing an observation target such as Paramecium or squirt sperm alive requires enormous effort and cost to create the environment, and may not be collected depending on the season.
- the movement direction and speed thereof cannot be controlled, so that there are many cases where it is not suitable as an observation target during preparation. From this background, the tracking microscope could not be prepared as desired, and improvements were desired in this respect.
- the third problem to be solved by the present invention is to provide a tracking device or a tracking microscope that can be developed and prepared at low cost and under control.
- the movement of the movable stage is performed by driving by the tracking device as described in the third problem above.
- the tracking microscope equipped with the developed and adjusted tracking device is used.
- the fifth problem to be solved by the present invention is to provide a tracking device or a tracking microscope capable of solving this problem and realizing three-dimensional tracking with an arbitrary object / illumination technique / observation technique.
- An object of the present invention is to provide a tracking device, a tracking microscope, and a tracking method that enable three-dimensional tracking.
- the tracking device (Characteristics of the invention of claim 1)
- the tracking device is a rectangular preparation (chamber) that holds a moving object (for example, a microorganism or a non-moving object may be included). ), A movable stage in which the rectangular preparation is fixed via a fixing mechanism, an objective lens arranged to face the rectangular preparation, and an imaging device that captures an image of a moving object imaged by the objective lens A display device that visually displays an image of the moving object imaged by the imaging device, and a two-dimensional or tertiary representation of the moving object imaged by performing visual feedback on the object image captured by the imaging device.
- a control device that controls the movable stage for original tracking.
- a detection unit that detects individual relative movement with respect to the preparation, and the target for which relative movement is detected by the detection unit.
- a target extraction unit that extracts an imaging target as a tracking target candidate, and a selection that selects a target to be imaged selected by the user from the tracking target candidates extracted by the target extraction hand and displayed on the display unit. Means.
- the image of the moving object held in the rectangular preparation is picked up by the image pickup device through the objective lens.
- the moving object is tracked two-dimensionally or three-dimensionally by performing visual feedback on the captured object image.
- the tracking is realized by a control device (for example, a computer) controlling the movable stage.
- a control device for example, a computer
- each object to be imaged that moves relative to the slide is extracted, and the object to be imaged selected from the extracted objects is tracked as a tracking object.
- the user selects the tracking target while looking at the display means.
- a captured image usually includes a non-moving object as well as a large number of moving objects, and a tracking target is selected from them. This selection can eliminate non-moving objects and unwanted moving objects. By this elimination, it is possible to effectively eliminate a tracking failure that would otherwise have occurred (first problem).
- a tracking device (Characteristics of the invention described in claim 2) indicates the coordinates of each of the imaging targets that the target extraction unit has set as a tracking target candidate on the premise of the device of claim 1. It is configured to grasp target coordinates, and the selection means is configured to grasp point coordinates indicating the coordinates of the point selected by the user on the display means, and the selection means When the point coordinates are grasped, the imaging target related to the coordinates closest to the point coordinates is selected as the tracking target.
- the selection unit compares the coordinates of each of the imaging targets as tracking target candidates with the point coordinates, and the point coordinates are grasped.
- the target to be imaged according to the coordinates closest to the point coordinates is selected as the tracking target.
- Each target to be imaged as a tracking candidate is moving relative to the preparation, so that the user's selection may not always be easy.
- the timing may not match. In such a case, tracking failure can be effectively suppressed by setting the imaging target closest to the point coordinates as the tracking target (first problem).
- a tracking target Used when an imaging target that is different from the target to be selected by the user becomes a tracking target, that is, when an imaging target that is different from the target to be selected is closer to the selection point
- the person can continue tracking as it is, but can also track the imaging target to be selected by redoing the selection operation.
- a tracking device includes a rectangular preparation for holding a moving object, and a movable stage in which the rectangular preparation is fixed via a fixing mechanism.
- An objective lens disposed opposite to the rectangular preparation, an imaging device that captures an image of a moving object imaged by the objective lens, and a display that visually displays the image of the moving object captured by the imaging device
- a control device for controlling the movable stage in order to track a moving object imaged two-dimensionally or three-dimensionally by performing visual feedback on the object image imaged by the imaging device. It is a device provided.
- a calculation unit that calculates an average relative speed with respect to the preparation for the imaging target that is continuously imaged over a predetermined time, and an average relative speed of the imaging target that is calculated by the calculation unit. Are compared with a predetermined reference speed to determine a slow speed, and the imaged target for which the average relative speed is determined to be faster than the reference speed by the determination means is extracted as a tracking target candidate.
- a target extraction unit; and a selection unit that selects, as a tracking target, a target to be imaged that satisfies a user's selection command or a predetermined selection condition from among tracking target candidates extracted by the target extraction hand. ing.
- the image of the moving object held in the rectangular preparation is picked up by the image pickup device via the objective lens.
- the moving object is tracked two-dimensionally or three-dimensionally by performing visual feedback on the captured object image.
- the tracking is realized by the control device controlling the movable stage.
- an imaged object to be tracked is extracted from an imaged object whose average relative speed is faster than a predetermined reference speed, and the tracking target is selected from the extracted tracking objects.
- the tracking target is selected depending on either the user's selection command or satisfaction of a predetermined selection condition (for example, the fastest is the selection condition).
- a captured image includes a non-moving object as well as a large number of moving objects, and it is necessary to select a tracking target from among them. This is because the non-moving object and the unnecessary moving object are excluded because the non-moving object looks more stable for the tracking device than the moving object, as described above. By this elimination, it is possible to effectively eliminate a tracking failure that would otherwise have occurred (first problem).
- a tracking device (Feature of the invention of claim 4) includes a rectangular preparation for holding a moving object, a movable stage in which the rectangular preparation is fixed via a fixing mechanism, and the rectangular
- the objective lens placed opposite to the preparation, the imaging device that captures the image of the moving object imaged by the objective lens, and the object image captured by the imaging device are captured by visual feedback.
- a control device for controlling the movable stage in order to track the moving object two-dimensionally or three-dimensionally.
- control device for example, a computer
- uses a target designating unit for example, a mouse or a keyboard
- the imaging target specified by the target designating unit as a tracking target.
- Object selection means for selecting.
- the image of the moving object held in the rectangular preparation is picked up by the image pickup device through the objective lens.
- the moving object is tracked two-dimensionally or three-dimensionally by performing visual feedback on the captured object image.
- the tracking is realized by the control device controlling the movable stage.
- the imaging target specified by the user of the apparatus by the input from the target specifying means is selected as a tracking target and is tracked.
- a captured image includes a non-moving object as well as a large number of moving objects, and it is necessary to select a tracking target from among them. This is because the non-moving object and the unnecessary moving object are excluded because the non-moving object looks more stable for the tracking device than the moving object, as described above. By this elimination, it is possible to effectively eliminate a tracking failure that would otherwise have occurred (first problem).
- a tracking device includes a rectangular preparation for holding a moving object, a movable stage in which the rectangular preparation is fixed via a fixing mechanism, and the rectangular
- the objective lens placed opposite to the preparation, the imaging device that captures the image of the moving object imaged by the objective lens, and the object image captured by the imaging device are captured by visual feedback.
- a control device for controlling the movable stage in order to track the moving object two-dimensionally or three-dimensionally.
- a calculation unit that calculates an average relative speed with respect to the chamber for the imaging target that is continuously imaged over a predetermined time, and an average relative speed of the imaging target calculated by the calculation unit.
- a target extracting means for selectively selecting a target to be imaged according to a user's selection instruction or satisfaction of a predetermined selection condition from among tracking target candidates extracted by the target extractor; Mode switching means for switching between the manual tracking mode and the automatic tracking mode. Further, here, the selection of the selection means is determined in advance according to the user's selection command when the mode switching means is switched to the manual tracking mode, and when the mode switching means is switched to the automatic tracking mode.
- the imaging target is selected as a tracking target in accordance with satisfaction of the selected condition.
- the image of the moving object held in the rectangular preparation is picked up by the image pickup device via the objective lens.
- the moving object is tracked two-dimensionally or three-dimensionally by performing visual feedback on the captured object image.
- the tracking is realized by a control device (for example, a computer) controlling the movable stage.
- a control device for example, a computer
- an object to be imaged having an average relative speed higher than a predetermined reference speed is extracted, and tracking is performed by selecting from the extracted tracking objects.
- the tracking target is selected depending on either the user's selection command or satisfaction of a predetermined selection condition (for example, the fastest is the selection condition). Which is involved depends on the switching of the mode switching means.
- the mode switching means when the mode switching means is switched to the manual tracking mode, the tracking target is selected based on the user's selection command. Conversely, when the mode switching means is switched to the automatic tracking mode, a predetermined selection condition is satisfied. Is selected for tracking.
- the fixing mechanism has the following configuration. That is, the fixing mechanism includes a fixing portion that is directly fixed to the movable stage and a rectangular frame supported by the fixing portion, and the rectangular frame supports the both ends in the longitudinal direction of the rectangular preparation downward. A pair of supporting piece portions, each supporting piece portion being lowered toward the bottom surface via a contact surface depending from the upper surface to receive both ends of the rectangular preparation. A stepped portion is formed that is partitioned by both side surfaces that stand opposite to each other across the bottom surface.
- the distance between the both side surfaces is substantially the same as the width dimension of the both end portions for positioning the rectangular slide in the width direction of the both end portions, and the distance between both contact surfaces is longer than the longitudinal dimension of the rectangular preparation.
- One of the support piece portions is in contact with the end surface of the rectangular preparation placed when protruding from the contact surface through the interior and the other contact surface.
- At least two buffer screws sandwiching the rectangular preparation in between are attached in such a manner as to be separated from each other in the longitudinal direction of the support piece portion so as to advance and retreat.
- the fixing portion partially constituting the fixing member is directly fixed to the movable stage, and thereby the rectangular frame is indirectly fixed.
- the rectangular preparation is placed on a rectangular frame. At this time, both end portions of the rectangular preparation are placed on the bottom surfaces of the step portions formed on the support piece portions.
- the width direction of the end portion of the placed rectangular preparation is positioned by being sandwiched between both side surfaces, and the longitudinal direction is similarly positioned by one abutting surface and a buffer screw. Positioning in the width direction is performed at the same time as placing, and positioning in the longitudinal direction is performed when the buffer screw is advanced and brought into contact with the end face of the rectangular preparation.
- the buffer screw has a function to relieve the inertia caused by stopping and moving the movable stage.
- the buffer screw is made of a softer material than the slide (If it is too hard, the slide may be damaged). When the screw is tightened, it will be deformed appropriately and between the slide and the wall, between the slide and the screw, and between the screw and the screw hole. It has the effect of facilitating adjustment of the frictional force (vertical drag) between the wall surfaces. (Second problem).
- the screw member is made of a synthetic resin material.
- the buffer screw of the apparatus of claim 6 is made of synthetic resin, it is lightweight and easy to manufacture. The degree of the buffering effect can be easily adjusted by appropriately selecting the synthetic resin material.
- the movable stage is installed on a manual stage.
- the movable stage can be moved by moving the manual stage.
- the movable stage of the apparatus of any one of claims 1 to 7 can be moved by manually moving the manual stage. Since the movable stage and the rectangular preparation move together, the rectangular preparation can be moved indirectly by moving the manual stage. In other words, it is possible to create a pseudo-moving object so that a non-moving object held by a rectangular preparation moves. For this reason, it is not necessary to prepare a living observation target in the development and adjustment of the tracking device, and the labor and cost can be reduced accordingly, and the development and adjustment are facilitated (third problem). .
- control device is configured to be able to stop tracking in a reversible manner.
- the control device of the device of claim 8 can be stopped for tracking, first, when it is desired to stop for some reason, secondly, manual tracking is substituted for tracking by the tracking device. This is very convenient when you want to change the tracking target. In other words, if the manual stage is moved while the movement of the movable stage is stopped, tracking as intended by the observer can be performed (fourth problem). If you want to restart after stopping, you can cancel tracking stop and return.
- the objective lens includes a variable focus lens. is there.
- the objective lens of the apparatus is a variable focus lens, it is possible to easily track the movement of the moving object in the Z-axis direction (vertical direction). Can do.
- the movement in the Z-axis direction includes the movement of the moving animal in the same direction and the vertical vibration of the rectangular preparation, but in any case, a clearer image can be obtained compared to the fixed focus lens.
- the movement in the Z-axis direction in the three-dimensional tracking can also be omitted (fifth problem).
- a tracking microscope according to an eleventh aspect includes the tracking device according to any one of the first to tenth aspects.
- the tracking apparatus since the tracking apparatus according to any one of the first to eleventh aspects is included, it is possible to obtain a microscope that makes the best use of the characteristics of each apparatus. That is, it is difficult to generate a tracking failure or a blurred image, it is easy to develop and adjust, the object to be observed can be easily changed, and three-dimensional tracking can be performed without complication.
- the tracking microscope according to claim 12 performs two-dimensional imaging of a moving object captured by performing visual feedback on an image of the moving object held on the slide.
- This is a tracking method for tracking in a three-dimensional manner. Specifically, for an imaging target that continues to be imaged over a predetermined time, a detection procedure for detecting individual relative movements with respect to the slide, and an imaging target for which relative movement has been detected in the detection procedure.
- a target extraction procedure for extracting as a tracking target candidate, and a selection procedure for selecting an imaging target selected by the user from the tracking target candidates extracted by the target extractor and displayed on the display means, as a tracking target. Have.
- the moving objects (objects to be imaged) held in the preparation are continuously imaged, and the average relative speed with respect to those preparations is calculated. If the relative velocity with respect to the preparation is zero, the object does not move with respect to the preparation, so it is determined that it is not a moving object and is excluded from the tracking target.
- the user selects the tracking target while looking at the display means.
- a captured image usually includes a non-moving object as well as a large number of moving objects, and a tracking target is selected from them. This selection can eliminate non-moving objects and unwanted moving objects. By this elimination, it is possible to effectively eliminate a tracking failure that would otherwise have occurred (first problem).
- a tracking microscope according to a thirteenth aspect (hereinafter referred to as “the method of the thirteenth aspect” as appropriate) indicates the coordinates of each imaging target as a tracking target candidate in the target extraction procedure on the premise of the method of the twelfth aspect.
- the target coordinates are grasped, and in the selection procedure, the point coordinates indicating the coordinates of the point selected by the user on the display means are grasped, and when the point coordinates are grasped, the object related to the coordinates closest to the point coordinates is obtained.
- An imaging target is selected as a tracking target.
- the selection procedure when the coordinates of each of the imaging target as the tracking target candidates are compared with the point coordinates and the point coordinates are grasped.
- the imaging target related to the coordinates closest to the point coordinates is selected as the tracking target.
- Each target to be imaged that is a tracking candidate moves relative to the preparation, so that the user's selection may not always be easy.
- the timing may not match. In such a case, tracking failure can be effectively suppressed by setting the imaging target closest to the point coordinates as the tracking target (first problem).
- a tracking target Used when an imaging target that is different from the target to be selected by the user becomes a tracking target, that is, when an imaging target that is different from the target to be selected is closer to the selection point
- the person can continue tracking as it is, but can also track the imaging target to be selected by redoing the selection operation.
- a tracking method according to claim 14 is a two-dimensional representation of a moving object imaged by performing visual feedback on a captured image of the moving object held on the slide. This is a tracking method for tracking in a three-dimensional manner. Specifically, tracking is performed through a calculation procedure, a determination procedure, an object extraction, and a selection procedure.
- the calculation procedure is a procedure for calculating an average relative speed with respect to the preparation for an object to be imaged that continues to be imaged over a predetermined time.
- the determination procedure is a procedure for determining the slow speed by comparing the average relative speed of the imaging target calculated by the calculation procedure with a predetermined reference speed.
- the target extraction procedure is a procedure for extracting, as a tracking target candidate, the imaged target for which the average relative speed is determined to be faster than the reference speed by the determination unit.
- the selection procedure is a procedure for selecting, as a tracking target, an imaging target that satisfies a user's selection command or a predetermined selection condition from among the tracking target candidates extracted by the target extractor.
- the moving objects (objects to be imaged) held in the preparation are continuously imaged, and the average relative velocity with respect to those preparations is calculated. If the average relative speed is zero, it is not moving with respect to the slide (slower than the reference speed), so it is determined that it is not a moving object and is excluded from the tracking target. Furthermore, the imaging target whose average relative speed is lower than the reference speed is also excluded from the tracking target. Since what remains to be imaged exceeds the reference speed, these are extracted, and tracking is performed using a selection command from the user or satisfaction of a predetermined selection condition as a tracking target.
- a tracking device and a tracking microscope that do not easily generate a tracking failure or a blurred image, are easy to develop and adjust, can easily change an observation target, and can perform three-dimensional tracking without being complicated. As well as a tracking method.
- FIG. 1 shows a tracking microscope (tracking microscope, culture microscope) provided with a tracking device according to the present embodiment.
- the tracking microscope 1 (hereinafter simply referred to as “microscope 1”) is generally composed of a microscope body 3 and a tracking device 21.
- the microscope main body 3 includes a leg portion 5 positioned at the lowermost end, an inverted L-shaped arm portion 7 that rises from the upper portion of the leg portion 5 and bends at the upper end portion and protrudes forward (frontward in FIG. 1),
- the lamp 9 is a light source, and a condensing lens 11 that condenses the light from the lamp 9.
- the tracking device 21 will be described in the next section.
- the tracking device 21 is generally composed of an objective lens 23, an imaging device 25, a movable stage 31, a manual stage 51, and a control device 81.
- the objective lens 23 is of a revolver type so that a plurality of lenses having different magnifications can be exchanged, and the objective lens 23 is positioned above the condenser lens 11 (at a position facing the object to be imaged).
- the imaging device 25 is for capturing an image formed through the objective lens 23, and is attached to the top of the arm unit 7.
- a CMOS imager called “profile imager (trademark)” (manufactured by Hamamatsu Photonics) or the like is suitable for the imaging device 25.
- the maximum frame rate of the CMOS imager is 2,421 frames / s.
- An image picked up by the image pickup device 25 is digitally converted by a 12-bit AD converter and sent to the control device 81 as an 8-bit image. For monitoring and acquisition of image data, simultaneous imaging with a high-speed camera may be performed.
- the movable stage 31 employs an XY stage capable of two-dimensional movement of the stage part.
- the movable stage 31 includes a stage unit 33 and a drive unit 35 that drives the stage unit 33, and the drive unit 35 is controlled by a personal computer that functions as a control device 61.
- the movable stage 31 is entirely installed on the manual stage 51, and the movable stage 31 itself can be moved two-dimensionally by manually controlling the manual stage 51.
- the control device 61 includes an image input unit 63, an image preprocessing unit 65, an image storage unit 67, an average relative speed calculation unit 69, a speed determination unit 71, a tracking candidate list generation unit 73, a tracking target selection unit 75, and a control command unit 77. And a data storage unit 79 and a stage control unit 81.
- the image input unit 63 has a function of capturing image data captured by the imaging device 25 and inputting the image data to the image preprocessing unit 65.
- the control device 61 of the present embodiment may be realized by starting various software that operates on a general-purpose personal computer (not shown) in addition to the hardware described above.
- the image preprocessing unit 63 removes fixed pattern noise from the captured image, and the image after the removal is stored in the image storage unit 67.
- the image after noise removal is sent to the average relative speed calculation unit 69.
- the average relative speed calculation unit 69 functions as a calculation unit that calculates an average relative speed with respect to the preparation for an object to be imaged (existing in an imaging range for a certain period of time) that has been captured for a predetermined time.
- the calculated average relative speed data is stored in the data storage unit 79 for each different object to be imaged and is sent to the speed determination unit 71 which is a determination unit.
- the speed determination unit 71 determines the slow speed of the average relative speed of the object with respect to the reference speed as compared with the reference speed (preset by the user) stored in the data storage unit 79.
- a group of target data (target data) for which the speed determination unit 71 determines that the average relative speed is faster than the reference speed is extracted, and these data are used as a tracking candidate list generation unit 73 that functions as a target extraction unit.
- the tracking candidate list generation unit 73 writes the sent target data group in the tracking candidate list 85 (see FIG. 3) in association with the target code so as to be searchable. In the present embodiment, the above processing is repeated at a rate of 1000 times per second.
- the tracking candidate list 85 for each of the extracted imaging targets, a target code for identifying the target, coordinates indicating the target position with reference to the preparation 15, and a ratio indicating how fast the reference speed is. It is advisable to indicate at least three of the reference speeds.
- the tracking candidate list 85 is stored in the data storage unit 79 and displayed on the display device 27 so that the user can see it.
- the data of the imaging target whose average relative speed is slower than the reference speed is deleted after being stored in the data storage unit 79 and is not sent to the tracking candidate list generation unit 73.
- the reference speed is set, and the average relative speed is determined by comparing with the reference speed.
- the fact that the average relative speed is faster than the reference speed indicates the activity, and the activity This is because a certain moving object is considered to be healthy and most suitable for the object to be imaged.
- Objects to be imaged below the reference speed include both moving objects that are moving but not active, and non-moving objects that do not move at all (for example, microorganisms attached to dust and slides). Is not suitable for tracking, so it is removed from the tracking candidates.
- the tracking target selection unit 75 serving as a selection unit receives a selection command input via the input unit 29, selects a target to be imaged corresponding to the selection command from tracking candidates, and selects the control command unit 77 for the selection. Communicate the subject.
- the control command unit 77 that has received the transmission transmits a control command corresponding to the received transmission to the stage control unit 81.
- the selection command is performed by the user operating the input unit 29 while looking at the display device 27.
- the selection by the user's operation is referred to as selection in the manual tracking mode.
- an automatic tracking mode corresponding to the manual tracking mode is also provided. Switching between the manual tracking mode and the automatic tracking mode is performed via the input unit 29. That is, the input unit 29 also serves as a mode switching unit.
- the tracking target selection unit 75 reads out the selection conditions (preset by the user) stored in the data storage unit 79, and stores the selection conditions in the tracking candidate list 85.
- the tracking target is selected by comparing with the enumerated speed data. For example, a moving object having a maximum specific reference speed or a moving object that moves at a speed equal to or lower than a reference maximum speed determined separately from the reference speed can satisfy the selection condition.
- the object to be imaged (tracking object) selected in the manual tracking mode or the automatic tracking mode is imaged, and the imaged moving object is tracked two-dimensionally or three-dimensionally by performing visual feedback on the image.
- the stage control unit 81 controls the drive unit 35 of the movable stage 31.
- the control command unit 77 transmits a command to the stage control unit 81 as described above, and manages state transitions according to inputs via the input unit 29.
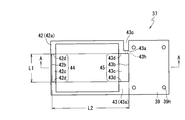
- the fixing mechanism 37 for fixing the preparation 15 to the movable stage 31 will be described with reference to FIGS.
- the fixing mechanism 37 includes a fixing portion 39 that is directly fixed to the movable stage 31 and a rectangular frame 41 that is supported by the fixing portion 39. Since the fixing mechanism 37 employed in the present embodiment is formed by cutting an aluminum plate of 118 mm ⁇ 54 mm ⁇ 4 mm, the fixing portion 39 and the rectangular frame 41 are integrated from the time of manufacture, but are manufactured separately. What was integrated later by fixing both by some fixing means can also be used as the fixing mechanism 37.
- the dimension of the aluminum plate is 72 mm ⁇ 22 mm ⁇ ? ?
- the dimensions are selected in order to provide sufficient margin to hold them with reference to the dimensions of a typical preparation of mm, but it goes without saying that different dimensions can be employed as long as the object of the present invention can be achieved. Yes.
- a plate made of other materials such as a metal plate other than an aluminum plate and a synthetic resin plate, a plate formed by combining different materials such as a metal and a synthetic resin, and other than a plate shape Shaped members can also be used.
- the entire fixing mechanism 37 can be fixed to the movable stage 31 by (see FIG. 4).
- the fixing portion 39 according to the present embodiment occupies approximately two-thirds of the length of the fixing mechanism 37 in the longitudinal direction (left-right direction in FIG. 5), and the remaining two-thirds are It is occupied by a rectangular frame 41.
- the rectangular frame 41 includes a support piece portion 42 located on the open end side, a support piece portion 43 that is opposed to the support piece portion 42, and a side piece portion that connects the support piece portion 42 and the support piece portion 43.
- the longitudinal dimension of the rectangular opening 41h surrounded by the four sides is formed shorter than the longitudinal dimension L (see FIG. 4) of the preparation 15, and the width dimension is also formed longer than the width dimension W.
- the reason why the longitudinal dimension is shortened is that, as shown in FIG. 4, both ends of the preparation 15 are spanned and supported below by step portions 44 and 45 described later.
- the main reason why the width dimension is long is to secure the width dimension for forming the step portions 44 and 45.
- a step 44 is formed at the approximate center in the longitudinal direction (vertical direction in FIG. 5) of the support piece 42.
- the step portion 44 opens in the direction of the rectangular opening 41h, and descends toward the bottom surface 42c via a contact surface 42b that hangs down from the upper surface 42a of the support piece portion 42, while both side surfaces face each other across the bottom surface 42c. It is partitioned by 42d and 42d (see FIGS. 5 and 6).
- the distance L1 between the side surfaces 42d and 42d shown in FIG. 5 is set to a dimension (L1 ⁇ W) that is substantially the same as or slightly longer than the width dimension W at both ends of the preparation 15.
- the distance L2 between the contact surfaces 42b and 43b is set to a dimension (L2> L) longer than the longitudinal dimension L of the preparation.
- a step 45 is formed at the approximate center in the longitudinal direction (vertical direction in FIG. 5) of the support piece 43 facing the support piece 42. Similarly to the step portion 44, the step portion 45 also opens in the direction of the rectangular opening 41h.
- the step portion 45 descends toward the bottom surface 43c via a contact surface 43b depending from the upper surface 43a of the support piece portion 43, and sandwiches the bottom surface 43c. It is partitioned off by opposite side surfaces 43d and 43d (see FIGS. 5 and 6). As shown in FIG. 5, the distance between both side surfaces 43d and 43d is set to a dimension (L1 ⁇ W) that is substantially the same as or slightly longer than the width W at both ends of the preparation 15, that is, a dimension equal to L1. .
- the distance L2 between the contact surfaces 42b and 43b is set to a dimension (L2> L) that is longer than the longitudinal dimension L of the slide.
- this surplus dimension is a buffer screw that will be described later. This is to allow the protrusion of.
- Screw holes 42h and 42h are formed through the support piece 42 in the width direction.
- the screw holes 42h and 42h are holes for allowing the buffer screws 48 and 48 to penetrate the inside of the support piece 42 and protrude from the contact surface 42b so as to be able to advance and retract.
- the buffer screws 48, 48 are for abutting against the end surface of the rectangular preparation 15 placed on the bottom surface 42c when projecting, and sandwiching the rectangular preparation 15 with the other abutting surface 43b. .
- At least two buffer screws are necessary, and they are attached with a predetermined distance in the longitudinal direction of the support piece 42.
- the buffer screws 48, 48 have a function to soften the inertia accompanying the start / stop of the movable stage 31 and the direction change by elastic deformation thereof.
- the buffer screws 48 also have a function of preventing displacement in the thickness direction of the rectangular preparation 15 by frictional force due to contact with the end surface. These functions generally suppress the vertical vibration of the rectangular preparation so as not to exceed the depth of field of the objective lens.
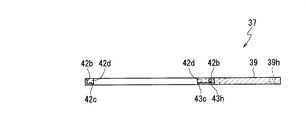
- the buffer screws 48 are formed of a synthetic resin material. As shown in FIGS. 4 and 5, a cutout 43 c is formed on the side of the support piece 43. The notch 43c is for inserting the buffer screw 49 from the lateral direction, and the tip of the inserted buffer screw 49 protrudes through the screw hole 43h so as to be able to advance and retreat.
- the protrusion of the buffer screw 49 is for abutting the tip of the buffer screw 49 to the end surface of the prepared slide 15 and preventing the displacement of the rectangular slide 15 in the thickness direction due to the frictional force caused by the contact.
- the buffer screw 49 is not necessarily required and can be omitted, a function of assisting the function of the buffer screws 48 can be expected by providing the buffer screw 49.
- provision of a buffer screw other than the buffer screw 49 is not prevented.
- Tracking device operation procedure The operation procedure (tracking method) of the tracking device will be described with reference to FIGS.
- Image data captured by the imaging device 25 is captured by the image input unit 63 (S1) and preprocessed by the image preprocessing unit 65 (S3).
- the preprocessed image data is sent to the image storage unit 67 and sent to the average relative speed calculation unit 69 (S4).
- the average relative speed calculation unit 69 continuously captures images from the sent image data for a predetermined time.
- the imaging target being identified is specified (S5). That is, those that initially existed but went out of the imaging range in the middle, and those that entered the imaging range from a certain point in time but have not passed the predetermined time are not specified.
- the average relative speed calculation unit 69 detects the average relative speed for each of the imaging targets (detection procedure) and sends it to the data storage unit 79 and the speed determination unit (S7). .
- the speed determination unit 71 reads the reference speed from the data storage unit 79 (S9), compares the read reference speed with each of the sent average relative speeds, and determines their slow speed.
- an imaging target whose average relative speed is faster than the reference speed is set as a tracking target candidate, and only image data related thereto is extracted (target extraction procedure), and the position coordinates (this is referred to as “target coordinates” ").
- the data is sent to the data storage unit 79 and the tracking candidate list generation unit 73 together with the target coordinate and the specific reference speed indicating how much faster the reference speed is (S11). That is, the imaging target related to the average relative speed (including those in the stopped state) slower than the reference speed is excluded here.
- the tracking candidate list generating unit 73 generates a tracking candidate list 85 (see FIG. 3) based on the image data, position coordinates, and ratio reference speed sent from the speed determining unit 71 (S13).
- the data of the created tracking candidate list 85 is stored in the data storage unit 79 (S14) and simultaneously displayed on the display device 27 (S15).
- the display on the display device 27 is to enable the user to specify the imaging target.
- the tracking target selection unit 75 checks whether the manual tracking mode or the automatic tracking mode is selected, and proceeds to S19 when the manual tracking mode is switched to, and proceeds to S41 when the automatic tracking mode is switched (S17). ). In S19, when there is a selection command waiting for the selection command, the imaging target related to the selection command is selected (selection procedure) and transmitted to the tracking control unit 77 (S21). The tracking control unit 77 that has received the transmission sends a command for tracking the selected imaging target to the movable stage 31 (drive unit 35), and performs two-dimensional tracking by visual feedback (S23).
- the point coordinates indicating the coordinates of the point selected by the user on the display unit 27 functioning as the display means are grasped, and when the point coordinates are grasped, the object to be imaged relating to the coordinates closest to the point coordinates is obtained.
- Select target as tracking target.
- the tracking is continued as it is (S25), and the tracking is ended when an end instruction is received (S27).
- the termination instruction is based on a termination command from the input unit 29.
- the tracking target selection unit 75 when the automatic tracking mode is switched reads the selection condition from the data storage unit 79 (S ⁇ b> 41), and each tracking candidate listed in the tracking candidate list is the read selection condition.
- the tracking target optimum for the selection condition is selected in light of the specific reference speed and transmitted to the tracking control unit 77 (S43).
- the tracking control unit 77 continues tracking as long as the subject to be imaged is not lost during tracking (S45, S47, and ends the tracking when receiving the termination instruction (S27).
- the termination instruction is sent from the input unit 29.
- the process returns to S47 and the object to be imaged is lost during tracking, the process returns to S41 and waits for selection of a new object to be imaged.
- two-dimensional tracking is assumed, it goes without saying that three-dimensional tracking may be used.
- the variable focus lens 91 includes an accommodating portion 94, a driving portion 101, a first medium 103, a second medium 104, a control portion 105, and a driving stage 106.
- the accommodating portion 94 includes an accommodating space 95, a first wall portion 96, a second wall portion 13, and a partition portion 98.
- the accommodating space 95 is disposed between the first wall portion 96 and the second wall portion 13. Furthermore, the first wall portion 96 and the second wall portion 13 are arranged so as to face each other with the accommodation space 95 interposed therebetween.
- the first wall portion 96 includes a first window portion 96a that transmits light.
- the 2nd wall part 13 is provided with the 2nd window part 97a which further permeate
- the first window portion 96a and the second window portion 97a can be configured, for example, by forming through holes in the first wall portion 96 and the second wall portion 13 and then inserting transparent glass into these portions.
- the partition part 98 is configured to form a first space 95a and a second space 95b by partitioning the accommodation space 95.
- the partition part 98 is configured in a flat plate shape in the present modification.
- the partition portion 98 includes a first surface 98a and a through hole 98b.
- the upper surface (see FIG. 8) of the partition portion 98 constitutes the first surface 98a.
- the 1st surface 98a comprises at least one part in the surface of the partition part 98. As shown in FIG.
- the first surface 98a is arranged in one virtual flat surface. That is, the first surface 98a has a shape that forms part of one virtual flat surface. In FIG. 8, the first surface 98 a coincides with the entire top surface of the partition portion 98. However, as described later, the first surface 98a only needs to exist around the through hole 98b, and the area thereof may be very small.
- the through hole 98b is formed so as to penetrate the first surface 98a and penetrate the partition portion 98.
- the through hole 98b is formed in a cylindrical shape that is circular in cross section.
- size of the through-hole 98b can be set suitably according to a use.
- the through hole 98b is assumed to have a diameter of about 3.000 ⁇ 0.0001 mm and a processing error, but this is merely an example.
- one through hole 98b will be described.
- the through hole 98b is disposed on the optical path where the light transmitted through the first window 96a is directed to the second window 97a (see FIG. 8).
- the through hole 98b is configured to transmit the first window portion 96a.
- a peripheral edge 98c constituting the open end of the through hole 98b is disposed at the end of the first surface 98a.
- the peripheral portion 98c is configured by a line of intersection between the first surface 98a and the inner peripheral surface of the through hole 98b.
- the shape of the peripheral portion 98c is generally preferably a perfect circle, but in principle, for example, an elliptical shape can be used according to the required shape of the lens.
- the first medium 103 and the second medium 104 are made of materials that do not mix with each other in the contact state.
- the refractive indexes of the first medium 103 and the second medium 104 are different from each other.
- a combination of such media can be selected as appropriate.
- a combination of PDMS (Poly-Dimethyl-Siloxane) and pure water can be used.
- the refractive indices are 1.40 and 1.33, respectively. Either of them may be the first medium 103.
- the refractive index (n2) of the second medium 104 is smaller than the refractive index (n1) of the first medium 103 (that is, n1> n2) unless otherwise specified.
- a liquid is used as the first medium 103 and the second medium 104.
- these media can be in the form of a sol, a gel, or an elastic body in addition to the liquid.
- any medium can be used as long as the change in the pressure received from the drive unit 101 can be applied to the interface between the two media to change the shape of the interface.
- the first medium 103 is accommodated in the first space 95a.
- the second medium 104 is accommodated in the second space 95b.
- the second medium 104 can be accommodated in the first space 95a.
- the medium accommodated in the first space 95a is named the first medium.
- the first medium 103 and the second medium 104 are in contact with each other.
- the outer periphery of the interface 107 between the first medium 103 and the second medium 104 in this contact state is located at the peripheral edge 98c in the through hole 98b (see FIG. 3).
- the drive unit 101 is configured to change the curvature of the interface 107 by changing the pressure or volume of the first medium 103 or the second medium 104.
- the drive unit 101 is mainly composed of a piezo element 102 having a laminated structure.
- a piezo element is a piezoelectric element that changes its shape in accordance with an applied voltage. By applying an AC voltage, the shape of the piezo element can be periodically expanded and contracted. Since the configuration of the driving unit 101 may be the same as that shown in Non-Patent Documents 6 and 7 described above, detailed description thereof is omitted.
- the drive unit 101 is configured to apply periodic pressure fluctuations to the first medium 103.
- the control unit 105 is configured to control the operation of the drive unit 101 by sending a drive signal to the drive unit 101.
- the drive signal in the control unit 105 may be generated according to previously input data, or may be dynamically generated based on analysis of an image obtained by the lens.
- the drive stage 106 is a mechanism for adjusting the position or posture of the drive unit 101 with respect to the first medium 103.
- Such a drive stage 106 can be easily configured by, for example, a table for fixing the drive unit 101 and an actuator (none of which is shown) that can position the table in a three-dimensional direction, and thus detailed description thereof is omitted. To do.
- variable focus lens 91 Manufacturing method of variable focus lens of this embodiment
- Step SA-1 First, a flat partition 98 is prepared. Next, the surface of the partition 98 is processed into a flat surface. Higher surface flatness is preferred. As a method of increasing the flatness, for example, there is a polishing process used when manufacturing a semiconductor tomb board. That is, since a method for increasing the flatness is established in a technique such as a semiconductor manufacturing process, high flatness can be achieved relatively easily by using it.
- the flat surface formed in this way can be used as the first surface 98a of the partition portion 98.
- the first surface 98a is a flat surface, the first surface 98a with high processing accuracy (that is, high flatness) can be obtained relatively easily.
- Step SA-2 a hole is made in the partition portion 98 to form a through hole 98b.
- a specific method of drilling for example, there is an etching process using photolithography. An example of this processing method is shown below.
- a mask portion for example, SiO 2 film
- a substrate for example, Si substrate
- a photoresist photosensitive agent
- the photoresist is exposed in a predetermined pattern.
- the exposed photoresist or the photoresist not exposed to light
- the mask portion is removed by etching based on the pattern transferred to the photoresist.
- the substrate in the portion where the mask portion is removed is removed by etching. In this way, the through hole 98b can be formed.
- the first surface 98a is formed with respect to the partition portion 98, and the through hole 98b is formed so as to penetrate the first surface 98a.
- the technique which can obtain high processing precision like photolithography is applicable. That is, according to the present embodiment, the processing accuracy of the through hole 98b can be made extremely high.
- Non-Patent Documents 6 and 7 the vicinity of the peripheral edge of the through hole is an inclined surface (conical surface). For this reason, the conventional technique has a problem that it is difficult to form a through-hole using a MEMS technique such as photolithography, and the processing accuracy of the peripheral edge of the through-hole tends to be low. Since the dimensional error in the shape of the peripheral portion of the through hole affects the accuracy of the obtained lens surface, it is difficult to improve the resolution with the conventional lens.
- the flat first surface 98a is formed in the partition portion 98, and the through hole 98b is formed so as to penetrate the partition surface 98. Therefore, the processing accuracy of the through hole 98b is increased. Can do. For this reason, with this technique, it becomes easy to increase the dimensional accuracy of the peripheral portion 98c of the through-hole work 42.
- variable focus lens 91 of the present embodiment the lens surface formed by the interface 107 can be formed with high accuracy. For this reason, the variable focus lens 91 has an advantage that the resolution of the lens can be improved.
- the first surface 98a only needs to contribute to the peripheral portion 98c. That is, the first surface 98a may be processed into a non-flat shape in a portion that does not contribute to the configuration of the peripheral edge portion 98c. For example, after the first surface 98a is processed flat, it can be processed into other shapes. It is also possible to laminate other members on the first surface 98a.
- Step SA-3 the partition portion 98 is attached to the housing section 11 in the housing portion 94 (see FIG. 2), thereby forming the first space 95a and the second space 95b.
- the first medium 103 is filled in the first space 95a.
- the liquid level of the first medium 103 gradually rises and reaches the inside of the through hole 98b.
- the liquid level further rises inside the through hole 98b and reaches the peripheral edge 98c.
- the operator observes the optical image reflected by the liquid surface of the first medium 103 while the liquid level rises, particularly after reaching the inside of the through hole 98b.
- Step SA-4 the magnification of the optical image reflected by the liquid surface of the first medium 103 changes greatly, it is determined that the liquid surface has reached the peripheral portion 98c. At that time, the filling of the first medium 103 is stopped.
- the shape of the liquid surface is defined by a contact angle determined by the inner peripheral surface of the through hole and the first medium 103. For this reason, basically, the optical image observed by reflection on the liquid surface does not change.
- the position of the outer periphery of the liquid surface is fixed to the peripheral edge 98c.
- the curvature of the liquid level changes greatly.
- a liquid surface that is concave changes to a convex shape.
- magnification of the reflected image on the liquid surface changes greatly and is visually recognized by an observer.
- this visual recognition can be performed directly by the naked eye, but when the lens is very small, it can be performed through a microscope.
- Step SA-5 the second medium 104 is filled in the second space 95b. Thereby, the second medium 104 can be arranged in contact with the upper part of the first medium 103. In this state, an interface 107 (see FIG. 8) is formed at the contact portion between the first medium 103 and the second medium 104. Then, the variable focus lens can be obtained by attaching the drive unit 101 to the housing unit 94. Since the specific manufacturing method other than the above may be the same as the techniques described in Non-Patent Documents 6 and 7, further detailed description is omitted.
- the first medium 103 is pressed to cause the interface 107 to protrude upward.
- the interface 107 bulges upward in FIG. 2 (indicated by a broken line in FIG. 2) while the periphery of the interface 40 remains in contact with the peripheral portion 98c of the through hole 98b.
- the position of the focal point due to the lens action at the interface 107 changes to the position indicated by the symbol F 'in FIG. According to this modification, a variable focus lens can be obtained in this way.
- the lens of the present modification has the advantage that the shape of the interface 107, that is, the shape of the lens surface can be made highly accurate, so that a high resolution can be obtained even though it is a variable focus lens.
- the focus position By releasing the pressure on the first medium 103, the focus position can be returned to the initial state.
- the focal length can be appropriately adjusted by adjusting the amount of pressing to the first medium 103.
- the focal length can be changed at a high frequency of about 1 kHz, for example.
- the lens of the present embodiment can achieve a high operating frequency.
- the density of the first medium 103 and the density of the second medium 104 are substantially matched. If the density of the two media is different, the shape of the interface 107 changes due to the influence of gravity when the posture of the lens changes (for example, when the vertical direction of the lens is reversed). For example, a phenomenon occurs in which the interface shape is deviated and decentered. On the other hand, in this embodiment, since the densities of the two media are matched, there is an advantage that the shape of the interface 107 does not change even in such a case.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Microscoopes, Condenser (AREA)
Abstract
複雑化することなく被撮像対象をトラッキングできるトラッキング装置を提供する。トラッキング装置のビジュアルフィードバックの制御装置を、予め定めた所定時間を超えて撮像され続ける被撮像対象について、プレパラートに対する個々の相対移動を検出する検出手段と、相対移動が検出された当該被撮像対象をトラッキング対象候補として抽出する対象抽出手段と、抽出され当該表示手段に表示されたトラッキング対象候補の中から使用者が選択した被撮像対象をトラッキング対象として選択する選択手段と、によって構成する。
Description
本発明は、撮像された運動性物体の画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を追跡するトラッキング装置を備えたトラッキング顕微鏡に関する。
運動性物体に追跡するための装置として、本願発明者らが提案したトラッキング顕微鏡(以下、適宜「従来のトラッキング顕微鏡」という)がある。従来のトラッキング顕微鏡は、ビジュアルフィードバック(Visual Feedback)により運動性物体(微生物)を追跡(二次元トラッキング)するためのトラッキング装置を搭載したトラッキング顕微鏡(以下、適宜「従来のトラッキング顕微鏡」という)である(非特許文献1参照)。一般の顕微鏡は、微生物の動きを充分な解像度で観察する上でとても重要な器具である。しかしながら、そのような顕微鏡であっても、視野に限界があるため、運動する微生物を継続的に観察することがたいへん難しいという問題があった。微生物の動きがきわめて速い場合、すぐに視野から外れてしまうからである。そのような課題を解決するために従来のトラッキング顕微鏡は、対象である微生物が視野中心に来るように視野を移動させることができるように構成されている。視野の移動は、トラッキング顕微鏡が備える可動ステージがこれを可能とし、その可動ステージの高速移動によって可動ステージ上の観察対象物を視野中心に来させるようになっている。(非特許文献2、非特許文献3参照)。さらに、従来のトラッキング顕微鏡は、上述したように二次元トラッキングを行うものであるが、可動ステージや対物レンズを上下動させることによって三次元トラッキングも可能となる(非特許文献4及び5参照)。これらに加え、印加電圧に応じて形状を変化させる圧電素子(ピエゾ素子)の形状を周期的に伸縮させるための駆動部の構成が、非特許文献6及び7に示されている。
H.Oku,N.Ogawa and M.Ishikawa,K.Hashimoto. Two-demensional tracking of a micro-organism allowing high-resolution observation with various imaging techniques, REVIEW OF SCIENTIFIC INSTRUMENTS 76.034301(2005)
奥寛雅、石井抱、石川正俊:高速ビジュアルフィードバックによる微生物のトラッキング:ロボティックス・メカトロニクス講演会(2001)
尾川順子、石川貴彦、奥寛雅、柴小菊、吉田学、石川正俊:高速ビジュアルフィードバックによる微生物のトラッキング:[No.07-2]Proceedings of the 2007 JSME Conference on Robotics and Mechatronics, Akita, Japan, May 10-12,2007
H. Oku, M. Ishikawa, Theodorus, and K. Hashimoto : High-speed autofocusing of a cell using diffraction pattern, Optics Express, Vol.14, pp.3952-3960 (2006)
尾川順子:高速ビジュアルサーボ技術を用いたマイクロ世界の計測と制御:第21回エアロ・アクアバイオメカニズム研究会講演会資料(2008.3.21,千葉大学)
H. Oku, M. Ishikawa, Rapid Liquid Variable-F0ocus Lens with 2-ms Response, Pric. Of the 19th Annual Meeting of the IEEE LEOS(2006)
奥寛雅、石川正俊、液体界面を屈折面とする高速可変焦点レンズの構造、日本光学会年次学術講演会・日本分光学会秋季後援会 Optics & Photonics Japan 2006(東京, 2006.11.9)/Post-Deadline 論文集, PP.10-11
(第1の課題)
しかしながら、従来のトラッキング顕微鏡によれば、運動性物体よりも非運動性物体の方が、トラッキング装置にとってより安定して見えるため、観察対象の中に両物体が混在している場合にトラッキング障害となるおそれがあった。ここで、たとえば、運動性物体である微生物と非運動性物体である塵埃(ごみ)とが混在している場合を考える。この場合に、トラッキングしていた微生物が視界から消えた瞬間におけるトラッキング装置は、それに代わる新たなトラッキング対象として塵埃を認識しそのままの状態を継続させてしまう。このように本来の対象である運動性物体をトラッキングしないで、非運動性物体をトラッキング(静止状態のトラッキング)してしまうのが、トラッキング障害の典型例である。トラッキング障害の発生しづらいトラッキング装置若しくはトラッキング顕微鏡の提供が、本発明が解決しようとする第1の課題である。
しかしながら、従来のトラッキング顕微鏡によれば、運動性物体よりも非運動性物体の方が、トラッキング装置にとってより安定して見えるため、観察対象の中に両物体が混在している場合にトラッキング障害となるおそれがあった。ここで、たとえば、運動性物体である微生物と非運動性物体である塵埃(ごみ)とが混在している場合を考える。この場合に、トラッキングしていた微生物が視界から消えた瞬間におけるトラッキング装置は、それに代わる新たなトラッキング対象として塵埃を認識しそのままの状態を継続させてしまう。このように本来の対象である運動性物体をトラッキングしないで、非運動性物体をトラッキング(静止状態のトラッキング)してしまうのが、トラッキング障害の典型例である。トラッキング障害の発生しづらいトラッキング装置若しくはトラッキング顕微鏡の提供が、本発明が解決しようとする第1の課題である。
(第2の課題)
可動ステージの高速移動によって観察対象物を視野中心に来させるようになっている点は、既に述べた。ここで、第1番目に可動ステージが動く面とプレパラート表面とがマイクロメートルの精度で並行(アライメント)になっている状態を実現する必要があるが、従来はこの状態が実現できないことが多く、可動ステージの移動に伴ってプレパラート表面の位置が上下にも移動してしまい、焦点面から外れてしまう恐れがあった。可動ステージの高速移動は、その上に固定したプレパラートをも高速移動させ、さらに、追跡のための発進停止や方向転換が繰り返される。第2番目に従来のプレパラートはその一端側が片持ち支持されていたので、この方向転換の際に支持されていない他端側が慣性とその弾性とによって上下振動することがあった。この振動が、プレパラートの他端側を顕微鏡の被写界深度を超えたこところまで変位させてしまう結果、焦点が合わなくなって鮮明画像を得られなくなる場合があった。さらに、上述した第1番目及び第2番目の問題点を解決しようとすると、可動ステージにプレパラートを固定する固定機構が堅固で着脱しづらい構造になり、使い勝手が悪くなりがちであった。トラッキング装置若しくはトラッキング顕微鏡において、プレパラートの焦点面からの外れや焦点が合わなくなることによる不鮮明画像を、使い勝手がよい状態を保ちながら防止することが、本発明が解決しようとする第2の課題である。
可動ステージの高速移動によって観察対象物を視野中心に来させるようになっている点は、既に述べた。ここで、第1番目に可動ステージが動く面とプレパラート表面とがマイクロメートルの精度で並行(アライメント)になっている状態を実現する必要があるが、従来はこの状態が実現できないことが多く、可動ステージの移動に伴ってプレパラート表面の位置が上下にも移動してしまい、焦点面から外れてしまう恐れがあった。可動ステージの高速移動は、その上に固定したプレパラートをも高速移動させ、さらに、追跡のための発進停止や方向転換が繰り返される。第2番目に従来のプレパラートはその一端側が片持ち支持されていたので、この方向転換の際に支持されていない他端側が慣性とその弾性とによって上下振動することがあった。この振動が、プレパラートの他端側を顕微鏡の被写界深度を超えたこところまで変位させてしまう結果、焦点が合わなくなって鮮明画像を得られなくなる場合があった。さらに、上述した第1番目及び第2番目の問題点を解決しようとすると、可動ステージにプレパラートを固定する固定機構が堅固で着脱しづらい構造になり、使い勝手が悪くなりがちであった。トラッキング装置若しくはトラッキング顕微鏡において、プレパラートの焦点面からの外れや焦点が合わなくなることによる不鮮明画像を、使い勝手がよい状態を保ちながら防止することが、本発明が解決しようとする第2の課題である。
(第3の課題)
可動ステージの移動は、トラッキング顕微鏡が備えるトラッキング装置による駆動によって行われるが、ここで、そのトラッキング装置の開発・調整に当って改良の余地があった。トラッキング装置の開発に当たり様々な実地実験が必要となるが、従来のトラッキング装置によれば実際に生きている観察対象を用意する必要があった。たとえば、ゾウリムシやホヤ精子のような観察対象を生きたまま用意することは、その環境を作り出すための手間やコストが膨大であり、また、季節によっては採取不可能の場合もある。さらに、生きた観察対象を用意できたとしても、その運動方向や速度の制御ができないことから、調製途中の観察対象として適さない場合が多かった。このような背景からトラッキング顕微鏡の調製が思うように行うことができず、この点に改良が望まれていた。開発・調製を低コストで、かつ、制御下において行うことのできるトラッキング装置若しくはトラッキング顕微鏡の提供が、本発明が解決しようとする第3の課題である。
可動ステージの移動は、トラッキング顕微鏡が備えるトラッキング装置による駆動によって行われるが、ここで、そのトラッキング装置の開発・調整に当って改良の余地があった。トラッキング装置の開発に当たり様々な実地実験が必要となるが、従来のトラッキング装置によれば実際に生きている観察対象を用意する必要があった。たとえば、ゾウリムシやホヤ精子のような観察対象を生きたまま用意することは、その環境を作り出すための手間やコストが膨大であり、また、季節によっては採取不可能の場合もある。さらに、生きた観察対象を用意できたとしても、その運動方向や速度の制御ができないことから、調製途中の観察対象として適さない場合が多かった。このような背景からトラッキング顕微鏡の調製が思うように行うことができず、この点に改良が望まれていた。開発・調製を低コストで、かつ、制御下において行うことのできるトラッキング装置若しくはトラッキング顕微鏡の提供が、本発明が解決しようとする第3の課題である。
(第4の課題)
可動ステージの移動は、トラッキング装置による駆動によって行われることは、上記第3の課題の中で述べたとおりであるが、このことは、開発・調整済のトラッキング装置を搭載したトラッキング顕微鏡の使用時においても改良すべき点を残した。それは、従来のトラッキング顕微鏡では、観察中にトラッキング対象を簡単に変更できない点である。たとえば、ある運動性物体をトラッキング観察しているときに、視野に入った他の運動性物体をしたい場合がある。静止物体を観察しているときに、運動性物体をトラッキング観察したくなる場合やその逆の場合もある。このようなときに観察対象を簡単に変更できないのが従来のトラッキング顕微鏡であった。観察中において観察対象を簡単に変更できるようなトラッキング装置若しくはトラッキング顕微鏡を提供することが、本発明が解決しようとする第4の課題である。
可動ステージの移動は、トラッキング装置による駆動によって行われることは、上記第3の課題の中で述べたとおりであるが、このことは、開発・調整済のトラッキング装置を搭載したトラッキング顕微鏡の使用時においても改良すべき点を残した。それは、従来のトラッキング顕微鏡では、観察中にトラッキング対象を簡単に変更できない点である。たとえば、ある運動性物体をトラッキング観察しているときに、視野に入った他の運動性物体をしたい場合がある。静止物体を観察しているときに、運動性物体をトラッキング観察したくなる場合やその逆の場合もある。このようなときに観察対象を簡単に変更できないのが従来のトラッキング顕微鏡であった。観察中において観察対象を簡単に変更できるようなトラッキング装置若しくはトラッキング顕微鏡を提供することが、本発明が解決しようとする第4の課題である。
(第5の課題)
従来のトラッキング顕微鏡のトラッキングには、二次元のものと三次元のものとがあることは、上掲した背景技術の欄で述べた。このうち三次元トラッキングでは、対象の深さ位置をDepth From Diffraction(DFDi)と呼ばれる手法で1000Hzで計測し、可動ステージ若しくは対物レンズを上下動(Z軸方向に移動)させることによってZ軸方向のトラッキングを実現する。しかし、DFDi手法は限られた対象と照明方法との組み合わせでのみ有効であり、汎用性に限界があった。この問題点を解決し、任意の対象・照明手法・観察手法で三次元トラッキングを実現することのできるトラッキング装置若しくはトラッキング顕微鏡の提供が、本発明が解決しようとする第5の課題である。
従来のトラッキング顕微鏡のトラッキングには、二次元のものと三次元のものとがあることは、上掲した背景技術の欄で述べた。このうち三次元トラッキングでは、対象の深さ位置をDepth From Diffraction(DFDi)と呼ばれる手法で1000Hzで計測し、可動ステージ若しくは対物レンズを上下動(Z軸方向に移動)させることによってZ軸方向のトラッキングを実現する。しかし、DFDi手法は限られた対象と照明方法との組み合わせでのみ有効であり、汎用性に限界があった。この問題点を解決し、任意の対象・照明手法・観察手法で三次元トラッキングを実現することのできるトラッキング装置若しくはトラッキング顕微鏡の提供が、本発明が解決しようとする第5の課題である。
本発明は、上述した5課題を解決するためになされたものであり、トラッキング障害や不鮮明画像が発生しづらく、開発・調整が行い易く、観察対象を簡単に変更でき、さらに、複雑化することなく三次元トラッキングを可能とするトラッキング装置、トラッキング顕微鏡並びにトラッキング方法を提供することを目的とする。
前掲した目的を達成するために本発明は、次項以下で述べる特徴を備えている。なお、何れかの請求項に係る発明の特徴を述べるに当って行う用語の定義等は、その記載順やカテゴリーの違いに関わりなく、可能な範囲において他の請求項に係る発明にも適用されるものとする。
(請求項1記載の発明の特徴)
請求項1記載の発明に係るトラッキング装置(以下、適宜「請求項1の装置」という)は、運動性物体(たとえば、微生物、非運動性物体を含む場合もある)を保持する矩形プレパラート(チェンバー)と、当該矩形プレパラートを、固定機構を介して固定した可動ステージと、当該矩形プレパラートに対して対向配置した対物レンズと、当該対物レンズにより結像された運動性物体の像を撮像する撮像装置と、当該撮像装置が撮像した運動性物体の像を可視表示する表示装置と、当該撮像装置に撮像された物体画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を二次元的若しくは三次元的に追跡するために当該可動ステージを制御する制御装置と、を備え装置である。ここで、当該制御装置が、予め定めた所定時間を超えて撮像され続ける被撮像対象について、当該プレパラートに対する個々の相対移動を検出する検出手段と、当該検出手段によって相対移動が検出された当該被撮像対象を、トラッキング対象候補として抽出する対象抽出手段と、当該対象抽出手によって抽出され当該表示手段に表示されたトラッキング対象候補の中から使用者が選択した被撮像対象をトラッキング対象として選択する選択手段と、を有している。
請求項1記載の発明に係るトラッキング装置(以下、適宜「請求項1の装置」という)は、運動性物体(たとえば、微生物、非運動性物体を含む場合もある)を保持する矩形プレパラート(チェンバー)と、当該矩形プレパラートを、固定機構を介して固定した可動ステージと、当該矩形プレパラートに対して対向配置した対物レンズと、当該対物レンズにより結像された運動性物体の像を撮像する撮像装置と、当該撮像装置が撮像した運動性物体の像を可視表示する表示装置と、当該撮像装置に撮像された物体画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を二次元的若しくは三次元的に追跡するために当該可動ステージを制御する制御装置と、を備え装置である。ここで、当該制御装置が、予め定めた所定時間を超えて撮像され続ける被撮像対象について、当該プレパラートに対する個々の相対移動を検出する検出手段と、当該検出手段によって相対移動が検出された当該被撮像対象を、トラッキング対象候補として抽出する対象抽出手段と、当該対象抽出手によって抽出され当該表示手段に表示されたトラッキング対象候補の中から使用者が選択した被撮像対象をトラッキング対象として選択する選択手段と、を有している。
請求項1の装置によれば、矩形プレパラート内に保持された運動性物体の像が対物レンズを介して撮像装置に撮像される。撮像された物体画像に対してビジュアルフィードバックを行うことによって運動性物体を二次元的若しくは三次元的に追跡する。追跡は、制御装置(たとえば、コンピュータ)が可動ステージを制御することによって実現する。ここで、プレパラートに対して相対移動する個々の被撮像対象を抽出し、その抽出した中から選択した被撮像対象をトラッキング対象としてトラッキングするようになっている。トラッキング対象の選択は、表示手段を見ながら使用者が行う。撮像画像には多数の運動性物体とともに非運動性物体が含まれることが通常であり、その中からトラッキング対象を選択する。この選択によって、非運動性物体および不要な運動性物体を排除することができる。この排除によって、排除がなければ生じたであろうトラッキング障害を有効排除することができる(第1の課題)。
(請求項2記載の発明の特徴)
請求項2に係るトラッキング装置(以下、適宜「請求項2の装置」という)は、請求項1の装置を前提として、前記対象抽出手段が、トラッキング対象候補とした被撮像対象各々の座標を示す対象座標を把握するように構成してあり、前記選択手段が、当該表示手段上において使用者が選択したポイントの座標を示すポイント座標を把握するように構成してあり、前記選択手段が、当該ポイント座標が把握された時点で当該ポイント座標と最も近い座標に係る被撮像対象をトラッキング対象として選択するように構成してある。
請求項2に係るトラッキング装置(以下、適宜「請求項2の装置」という)は、請求項1の装置を前提として、前記対象抽出手段が、トラッキング対象候補とした被撮像対象各々の座標を示す対象座標を把握するように構成してあり、前記選択手段が、当該表示手段上において使用者が選択したポイントの座標を示すポイント座標を把握するように構成してあり、前記選択手段が、当該ポイント座標が把握された時点で当該ポイント座標と最も近い座標に係る被撮像対象をトラッキング対象として選択するように構成してある。
請求項2の装置によれば、請求項1の装置の作用効果に加え、選択手段は、トラッキング対象候補とした被撮像対象各々の座標とポイント座標とを比較してポイント座標が把握された時点でポイント座標と最も近い座標に係る被撮像対象をトラッキング対象として選択する。トラッキング候補とした被撮像対象各々は、プレパラートに対して相対運動しているため、使用者の選択は必ずしも容易でない場合がある。使用者は狙いをつけた被撮像対象を選択しようとするがタイミングが合わない場合もある。そのような場合に、ポイント座標に直近の被撮像対象をトラッキング対象とすることによって、トラッキング障害を有効に抑制することができる(第1の課題)。使用者が選択しようとした被撮像対象とは異なる被撮像対象がトラッキング対象となってしまったとき、すなわち、選択しようとした被撮像対象よりも異なる被撮像対象のほうが選択ポイントに近かったとき使用者は、そのままでよければそのままトラッキングを続けることもできるが、選択作業をやり直して選択しようとした被撮像対象をトラッキングさせることもできる。
(請求項3記載の発明の特徴)
請求項3記載の発明に係るトラッキング装置(以下、適宜「請求項3の装置」という)は、運動性物体を保持する矩形プレパラートと、当該矩形プレパラートを、固定機構を介して固定した可動ステージと、当該矩形プレパラートに対して対向配置した対物レンズと、当該対物レンズにより結像された運動性物体の像を撮像する撮像装置と、当該撮像装置が撮像した運動性物体の像を可視表示する表示装置と、当該撮像装置に撮像された物体画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を二次元的若しくは三次元的に追跡するために当該可動ステージを制御する制御装置と、を備える装置である。ここで、当該制御装置が、予め定めた所定時間を超えて撮像され続ける被撮像対象について、当該プレパラートに対する平均相対速度を算出する算出手段と、当該算出手段が算出した被撮像対象の平均相対速度を、予め定めた基準速度と比較して遅速を判定する判定手段と、当該判定手段によって当該平均相対速度が当該基準速度よりも速いと判断された当該被撮像対象を、トラッキング対象候補として抽出する対象抽出手段と、当該対象抽出手によって抽出されたトラッキング対象候補の中から使用者の選択指令又は予め定めた選択条件の満足に係る被撮像対象をトラッキング対象として選択する選択手段と、を有している。
請求項3記載の発明に係るトラッキング装置(以下、適宜「請求項3の装置」という)は、運動性物体を保持する矩形プレパラートと、当該矩形プレパラートを、固定機構を介して固定した可動ステージと、当該矩形プレパラートに対して対向配置した対物レンズと、当該対物レンズにより結像された運動性物体の像を撮像する撮像装置と、当該撮像装置が撮像した運動性物体の像を可視表示する表示装置と、当該撮像装置に撮像された物体画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を二次元的若しくは三次元的に追跡するために当該可動ステージを制御する制御装置と、を備える装置である。ここで、当該制御装置が、予め定めた所定時間を超えて撮像され続ける被撮像対象について、当該プレパラートに対する平均相対速度を算出する算出手段と、当該算出手段が算出した被撮像対象の平均相対速度を、予め定めた基準速度と比較して遅速を判定する判定手段と、当該判定手段によって当該平均相対速度が当該基準速度よりも速いと判断された当該被撮像対象を、トラッキング対象候補として抽出する対象抽出手段と、当該対象抽出手によって抽出されたトラッキング対象候補の中から使用者の選択指令又は予め定めた選択条件の満足に係る被撮像対象をトラッキング対象として選択する選択手段と、を有している。
請求項3の装置によれば、矩形プレパラート内に保持された運動性物体の像が対物レンズを介して撮像装置に撮像される。撮像された物体画像に対してビジュアルフィードバックを行うことによって運動性物体を二次元的若しくは三次元的に追跡する。追跡は、制御装置が可動ステージを制御することによって実現する。ここで、予め定めた基準速度よりも平均相対速度の速い被撮像対象をトラッキング対象となる被撮像対象を抽出し、その抽出したトラッキング対象の中から選択してトラッキングするようになっている。トラッキング対象の選択は、使用者の選択指令又は予め定めた選択条件の満足(たとえば、最速を選択条件とする)の何れかに係らせる。撮像画像には多数の運動性物体とともに非運動性物体が含まれることが通常であり、その中からトラッキング対象を選択する必要がある。運動性物体よりも非運動性物体の方が、トラッキング装置にとってより安定して見えることは前掲したとおりであるから、非運動性物体および不要な運動性物体を排除するためである。この排除によって、排除がなければ生じたであろうトラッキング障害を有効排除することができる(第1の課題)。
(請求項4記載の発明の特徴)
請求項4に係るトラッキング装置(以下、適宜「請求項4の装置」という)は、運動性物体を保持する矩形プレパラートと、当該矩形プレパラートを、固定機構を介して固定した可動ステージと、当該矩形プレパラートに対して対向配置した対物レンズと、当該対物レンズにより結像された運動性物体の像を撮像する撮像装置と、当該撮像装置に撮像された物体画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を二次元的若しくは三次元的に追跡するために当該可動ステージを制御する制御装置と、を備える装置である。ここで、当該制御装置(たとえば、コンピュータ)が、被撮像対象を任意に指定するための対象指定手段(たとえば、マウスやキーボード)と、当該対象指定手段によって指定された被撮像対象をトラッキング対象として選択する対象選択手段と、を有している。
請求項4に係るトラッキング装置(以下、適宜「請求項4の装置」という)は、運動性物体を保持する矩形プレパラートと、当該矩形プレパラートを、固定機構を介して固定した可動ステージと、当該矩形プレパラートに対して対向配置した対物レンズと、当該対物レンズにより結像された運動性物体の像を撮像する撮像装置と、当該撮像装置に撮像された物体画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を二次元的若しくは三次元的に追跡するために当該可動ステージを制御する制御装置と、を備える装置である。ここで、当該制御装置(たとえば、コンピュータ)が、被撮像対象を任意に指定するための対象指定手段(たとえば、マウスやキーボード)と、当該対象指定手段によって指定された被撮像対象をトラッキング対象として選択する対象選択手段と、を有している。
請求項4の装置によれば、矩形プレパラート内に保持された運動性物体の像が対物レンズを介して撮像装置に撮像される。撮像された物体画像に対してビジュアルフィードバックを行うことによって運動性物体を二次元的若しくは三次元的に追跡する。追跡は、制御装置が可動ステージを制御することによって実現する。ここで、装置使用者が対象指定手段からの入力によって指定する被撮像対象をトラッキング対象として選択してトラッキングするようになっている。撮像画像には多数の運動性物体とともに非運動性物体が含まれることが通常であり、その中からトラッキング対象を選択する必要がある。運動性物体よりも非運動性物体の方が、トラッキング装置にとってより安定して見えることは前掲したとおりであるから、非運動性物体および不要な運動性物体を排除するためである。この排除によって、排除がなければ生じたであろうトラッキング障害を有効排除することができる(第1の課題)。
(請求項5記載の発明の特徴)
請求項5に係るトラッキング装置(以下、適宜「請求項5の装置」という)は、運動性物体を保持する矩形プレパラートと、当該矩形プレパラートを、固定機構を介して固定した可動ステージと、当該矩形プレパラートに対して対向配置した対物レンズと、当該対物レンズにより結像された運動性物体の像を撮像する撮像装置と、当該撮像装置に撮像された物体画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を二次元的若しくは三次元的に追跡するために当該可動ステージを制御する制御装置と、を備えている。ここで、当該制御装置が、予め定めた所定時間を超えて撮像され続ける被撮像対象について、当該チャンバーに対する平均相対速度を算出する算出手段と、当該算出手段が算出した被撮像対象の平均相対速度を、予め定めた基準速度と比較して遅速を判定する判定手段と、当該判定手段によって当該平均相対速度が当該基準速度よりも速いと判断された当該被撮像対象を、トラッキング対象候補として抽出する対象抽出手段と、当該対象抽出手によって抽出されたトラッキング対象候補の中から使用者の選択指令又は予め定めた選択条件の満足に係る被撮像対象を択一的に選択する選択手段と、
手動トラッキングモードと自動トラッキングモードとを切り替えるためのモード切替手段と、を含めて構成してある。さらにここで、当該選択手段の選択が、当該モード切替手段が手動トラッキングモードに切り替えられたときは使用者の選択指令に従って、かつ、当該モード切替手段が自動トラッキングモードに切り替えられたときは予め定めた選択条件の満足に従って被撮像対象をトラッキング対象として選択するように構成してある。
請求項5に係るトラッキング装置(以下、適宜「請求項5の装置」という)は、運動性物体を保持する矩形プレパラートと、当該矩形プレパラートを、固定機構を介して固定した可動ステージと、当該矩形プレパラートに対して対向配置した対物レンズと、当該対物レンズにより結像された運動性物体の像を撮像する撮像装置と、当該撮像装置に撮像された物体画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を二次元的若しくは三次元的に追跡するために当該可動ステージを制御する制御装置と、を備えている。ここで、当該制御装置が、予め定めた所定時間を超えて撮像され続ける被撮像対象について、当該チャンバーに対する平均相対速度を算出する算出手段と、当該算出手段が算出した被撮像対象の平均相対速度を、予め定めた基準速度と比較して遅速を判定する判定手段と、当該判定手段によって当該平均相対速度が当該基準速度よりも速いと判断された当該被撮像対象を、トラッキング対象候補として抽出する対象抽出手段と、当該対象抽出手によって抽出されたトラッキング対象候補の中から使用者の選択指令又は予め定めた選択条件の満足に係る被撮像対象を択一的に選択する選択手段と、
手動トラッキングモードと自動トラッキングモードとを切り替えるためのモード切替手段と、を含めて構成してある。さらにここで、当該選択手段の選択が、当該モード切替手段が手動トラッキングモードに切り替えられたときは使用者の選択指令に従って、かつ、当該モード切替手段が自動トラッキングモードに切り替えられたときは予め定めた選択条件の満足に従って被撮像対象をトラッキング対象として選択するように構成してある。
請求項5の装置によれば、矩形プレパラート内に保持された運動性物体の像が対物レンズを介して撮像装置に撮像される。撮像された物体画像に対してビジュアルフィードバックを行うことによって運動性物体を二次元的若しくは三次元的に追跡する。追跡は、制御装置(たとえば、コンピュータ)が可動ステージを制御することによって実現する。ここで、予め定めた基準速度よりも平均相対速度の速い被撮像対象を抽出し、その抽出したトラッキング対象の中から選択してトラッキングするようになっている。トラッキング対象の選択は、使用者の選択指令又は予め定めた選択条件の満足(たとえば、最速を選択条件とする)の何れかに係らせる。何れに係るかは、モード切替手段の切り替えによる。すなわち、モード切替手段が手動トラッキングモードに切り替えられたときは使用者の選択指令に基づいてトラッキング対象を選択し、逆に、自動トラッキングモードに切り替えられたときは予め定めた選択条件の満足したものをトラッキング対象として選択する。このようにトラッキングモードの切り替えを可能とすることによって、使用者の目的に合わせた対象選択ができるようになる。また、トラッキング対象の抽出によって、非運動性物体および不要な運動性物体を有効に排除することができる。この排除によって、排除がなければ生じたであろうトラッキング障害を有効排除することができる(第1の課題)。
(請求項6記載の発明の特徴)
請求項6に係るトラッキング装置(以下、適宜「請求項6の装置」という)では、請求項1乃至5いずれかの装置の好ましい態様として、固定機構を次の構成とした。すなわち、前記固定機構が、前記可動ステージに直接固定する固定部と、当該固定部に支持された矩形フレームと、から構成してあり、当該矩形フレームが、矩形プレパラートの長手方向両端部を下方支持する一対の支持片部を含めて構成してあり、当該支持片部各々には、当該矩形プレパラート両端部各々を受け入れるために上面から垂下する当接面を介して底面に向かって下る一方、当該底面を挟んで対向起立する両側面によって仕切られた段部を形成してある。当該両側面間の距離が当該矩形プレパラートの当該両端部幅方向の位置決めのために当該両端部幅寸法とほぼ同じく、かつ、両当接面間の距離が当該矩形プレパラートの長手方向寸法よりも長く設定してあり、当該支持片部のうち何れか一方には、内部を貫通して当該当接面から突出させたときに載置した矩形プレパラートの端面に当接して他方の当接面との間で当該矩形プレパラートを挟持する少なくとも2個の緩衝ネジを当該支持片部長手方向に離して進退可能に取り付けてある。
請求項6に係るトラッキング装置(以下、適宜「請求項6の装置」という)では、請求項1乃至5いずれかの装置の好ましい態様として、固定機構を次の構成とした。すなわち、前記固定機構が、前記可動ステージに直接固定する固定部と、当該固定部に支持された矩形フレームと、から構成してあり、当該矩形フレームが、矩形プレパラートの長手方向両端部を下方支持する一対の支持片部を含めて構成してあり、当該支持片部各々には、当該矩形プレパラート両端部各々を受け入れるために上面から垂下する当接面を介して底面に向かって下る一方、当該底面を挟んで対向起立する両側面によって仕切られた段部を形成してある。当該両側面間の距離が当該矩形プレパラートの当該両端部幅方向の位置決めのために当該両端部幅寸法とほぼ同じく、かつ、両当接面間の距離が当該矩形プレパラートの長手方向寸法よりも長く設定してあり、当該支持片部のうち何れか一方には、内部を貫通して当該当接面から突出させたときに載置した矩形プレパラートの端面に当接して他方の当接面との間で当該矩形プレパラートを挟持する少なくとも2個の緩衝ネジを当該支持片部長手方向に離して進退可能に取り付けてある。
請求項6の装置によれば、請求項1乃至5いずれかの装置における固定部材は、それを部分的に構成する固定部が可動ステージに直接固定され、これによって矩形フレームが間接固定される。矩形プレパラートは矩形フレームに載置され、このとき矩形プレパラートの両端部各々は支持片部各々に形成された段部の底面上に掛け渡し載置される。載置された矩形プレパラートの端部の幅方向は両側面によって挟まれて位置決めされ、同じく長手方向は一方の当接面と緩衝ネジとによって位置決めされる。幅方向位置決めは載置と同時に行われ、長手方向位置決めは緩衝ネジを進出させて矩形プレパラート端面に当接させたときに行われる。可動ステージの発進停止や方向転換に伴う慣性を和らげる機能を持つのが緩衝ネジである。緩衝ネジはプレパラートより柔らかい材質(硬すぎるとプレパラートを破損する恐れあり)で構成され、締められたときに適度に変形してプレパラートと壁面との間、プレパラートとネジとの間、ネジとネジ穴壁面間の摩擦力(垂直抗力)を調節しやすくする効果がある。(第2の課題)。
(請求項7記載の発明の特徴)
請求項7に係るトラッキング装置(以下、適宜「請求項7の装置」という)では、請求項6の装置の好ましい態様として、前記ネジ部材が、合成樹脂材によって構成してある。
請求項7に係るトラッキング装置(以下、適宜「請求項7の装置」という)では、請求項6の装置の好ましい態様として、前記ネジ部材が、合成樹脂材によって構成してある。
請求項7の装置によれば、請求項6の装置の緩衝ネジが合成樹脂製であるため、軽量かつ製造が容易である。緩衝効果の度合いも合成樹脂材の選択を適切に行うことによって、緩衝効果の度合いを簡単に調整することができる。
(請求項8記載の発明の特徴)
請求項8に係るトラッキング装置(以下、適宜「請求項8の装置」という)では、請求項1乃至7いずれかの装置の好ましい態様として、前記可動ステージが、手動ステージの上に設置してあり、当該手動ステージを移動させることによって当該可動ステージを移動させられるように構成してある。
請求項8に係るトラッキング装置(以下、適宜「請求項8の装置」という)では、請求項1乃至7いずれかの装置の好ましい態様として、前記可動ステージが、手動ステージの上に設置してあり、当該手動ステージを移動させることによって当該可動ステージを移動させられるように構成してある。
請求項8の装置によれば、請求項1乃至7いずれかの装置の可動ステージを、手動ステージを手動で動かすことによって移動させることができる。可動ステージと矩形プレパラートとは一体に移動するから、手動ステージを動かすことによって間接的に矩形プレパラートを移動させることができる。つまり、矩形プレパラートに保持させた動かない物体を、あたかも動くように、いわば、擬似的運動性物体を作り出すことができる。このため、トラッキング装置の開発や調整等において、生きている観察対象を用意する必要がなくなり、その分だけ手間やコストを削ることができ、開発や調整等が行い易くなる(第3の課題)。
(請求項9記載の発明の特徴)
請求項9に係るトラッキング装置(以下、適宜「請求項9の装置」という)では、請求項6の装置の好ましい態様として、前記制御装置が、復帰可能にトラッキング停止できるように構成してある。
請求項9に係るトラッキング装置(以下、適宜「請求項9の装置」という)では、請求項6の装置の好ましい態様として、前記制御装置が、復帰可能にトラッキング停止できるように構成してある。
請求項9の装置によれば、請求項8の装置の制御装置をトラッキング停止とすることができるので、第1に何らかの理由によって停止したいときに、第2にトラッキング装置によるトラッキングに替えて手動トラッキングをしたいときに、さらに第3にトラッキング対象を変更したいときに、たいへん便利である。つまり、可動ステージの移動を停止させたまま、手動ステージを動かせば、観察者の意のままのトラッキングを行うことができる(第4の課題)。停止後に再起動させたいときは、トラッキング停止を解除して復帰させればよい。
(請求項10記載の発明の特徴)
請求項10に係るトラッキング装置(以下、適宜「請求項10の装置」という)では、請求項1乃至9いずれかの装置の好ましい態様として、前記対物レンズが、可変焦点レンズを含めて構成してある。
請求項10に係るトラッキング装置(以下、適宜「請求項10の装置」という)では、請求項1乃至9いずれかの装置の好ましい態様として、前記対物レンズが、可変焦点レンズを含めて構成してある。
請求項10の装置によれば、請求項1乃至9いずれかの装置の対物レンズを可変焦点レンズとしたので、運動性物体のZ軸方向(上下方向)の移動に対して容易に追跡することができる。Z軸方向の移動は、同方向に向かう運動性動物の運動の他、矩形プレパラートの上下振動等があるが、いずれにしろ固定焦点レンズに比べより鮮明な画像を得ることができる。三次元トラッキングにおけるZ軸方向の動きを省略することもできる(第5の課題)。
(請求項11記載の発明の特徴)
請求項11に係るトラッキング顕微鏡(以下、適宜「請求項12の顕微鏡」という)は、請求項1乃至10何れかのトラッキング装置を含めて構成してある。
請求項11に係るトラッキング顕微鏡(以下、適宜「請求項12の顕微鏡」という)は、請求項1乃至10何れかのトラッキング装置を含めて構成してある。
請求項11のトラッキング顕微鏡によれば、請求項1乃至11何れかのトラッキング装置を含めて構成してあるため、各装置の特徴をそのまま生かした顕微鏡とすることができる。すなわち、トラッキング障害や不鮮明画像が発生しづらく、開発・調整が行い易く、観察対象を簡単に変更でき、さらに、複雑化することなく三次元トラッキングを可能とすることができる。
(請求項12記載の発明の特徴)
請求項12に係るトラッキング顕微鏡(以下、適宜「請求項12の方法」という)は、プレパラートに保持された運動性物体の撮像画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を二次元的若しくは三次元的に追跡するトラッキング方法である。具体的には、予め定めた所定時間を超えて撮像され続ける被撮像対象について、当該プレパラートに対する個々の相対移動を検出する検出手順と、当該検出手順で相対移動が検出された当該被撮像対象を、トラッキング対象候補として抽出する対象抽出手順と、当該対象抽出手によって抽出され表示手段に表示されたトラッキング対象候補の中から使用者が選択した被撮像対象をトラッキング対象として選択する選択手順と、を有する。
請求項12に係るトラッキング顕微鏡(以下、適宜「請求項12の方法」という)は、プレパラートに保持された運動性物体の撮像画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を二次元的若しくは三次元的に追跡するトラッキング方法である。具体的には、予め定めた所定時間を超えて撮像され続ける被撮像対象について、当該プレパラートに対する個々の相対移動を検出する検出手順と、当該検出手順で相対移動が検出された当該被撮像対象を、トラッキング対象候補として抽出する対象抽出手順と、当該対象抽出手によって抽出され表示手段に表示されたトラッキング対象候補の中から使用者が選択した被撮像対象をトラッキング対象として選択する選択手順と、を有する。
請求項12の方法によれば、プレパラート内に保持された運動性物体(被撮像対象)を連続的に撮像して、それらのプレパラートに対する平均相対速度を算出する。プレパラートに対する相対速度がゼロであればプレパラートに対して動いていないのであるから、それは運動性物体ではないと判断してトラッキング対象から外される。トラッキング対象の選択は、表示手段を見ながら使用者が行う。撮像画像には多数の運動性物体とともに非運動性物体が含まれることが通常であり、その中からトラッキング対象を選択する。この選択によって、非運動性物体および不要な運動性物体を排除することができる。この排除によって、排除がなければ生じたであろうトラッキング障害を有効排除することができる(第1の課題)。
(請求項13記載の発明の特徴)
請求項13に係るトラッキング顕微鏡(以下、適宜「請求項13の方法」という)は、請求項12の方法を前提として、前記対象抽出手順では、トラッキング対象候補とした被撮像対象各々の座標を示す対象座標を把握し、前記選択手順では、当該表示手段上において使用者が選択したポイントの座標を示すポイント座標を把握し、当該ポイント座標を把握した時点で当該ポイント座標と最も近い座標に係る被撮像対象をトラッキング対象として選択する。
請求項13に係るトラッキング顕微鏡(以下、適宜「請求項13の方法」という)は、請求項12の方法を前提として、前記対象抽出手順では、トラッキング対象候補とした被撮像対象各々の座標を示す対象座標を把握し、前記選択手順では、当該表示手段上において使用者が選択したポイントの座標を示すポイント座標を把握し、当該ポイント座標を把握した時点で当該ポイント座標と最も近い座標に係る被撮像対象をトラッキング対象として選択する。
請求項13の方法によれば、請求項12の方法の作用効果に加え、選択手順において、トラッキング対象候補とした被撮像対象各々の座標とポイント座標とが比較されポイント座標が把握された時点でポイント座標と最も近い座標に係る被撮像対象がトラッキング対象として選択される。トラッキング候補とされた被撮像対象各々は、プレパラートに対して相対運動しているため、使用者の選択は必ずしも容易でない場合がある。使用者は狙いをつけた被撮像対象を選択しようとするがタイミングが合わない場合もある。そのような場合に、ポイント座標に直近の被撮像対象をトラッキング対象とすることによって、トラッキング障害を有効に抑制することができる(第1の課題)。使用者が選択しようとした被撮像対象とは異なる被撮像対象がトラッキング対象となってしまったとき、すなわち、選択しようとした被撮像対象よりも異なる被撮像対象のほうが選択ポイントに近かったとき使用者は、そのままでよければそのままトラッキングを続けることもできるが、選択作業をやり直して選択しようとした被撮像対象をトラッキングさせることもできる。
(請求項14記載の発明の特徴)
請求項14に係るトラッキング方法(以下、適宜「請求項14の方法」という)は、プレパラートに保持された運動性物体の撮像画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を二次元的若しくは三次元的に追跡するトラッキング方法である。具体的には、算出手順、判定手順、対象抽出、そして選択手順を経てトラッキングを行う。算出手順は、予め定めた所定時間を超えて撮像され続ける被撮像対象について、当該プレパラートに対する平均相対速度を算出する手順である。判定手順は、当該算出手順で算出した被撮像対象の平均相対速度を、予め定めた基準速度と比較して遅速を判定する手順である。対象抽出手順は、当該判定手段によって当該平均相対速度が当該基準速度よりも速いと判断された当該被撮像対象を、トラッキング対象候補として抽出する手順である。最後に、選択手順は、当該対象抽出手によって抽出されたトラッキング対象候補の中から使用者の選択指令又は予め定めた選択条件の満足に係る被撮像対象をトラッキング対象として選択する手順である。
請求項14に係るトラッキング方法(以下、適宜「請求項14の方法」という)は、プレパラートに保持された運動性物体の撮像画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を二次元的若しくは三次元的に追跡するトラッキング方法である。具体的には、算出手順、判定手順、対象抽出、そして選択手順を経てトラッキングを行う。算出手順は、予め定めた所定時間を超えて撮像され続ける被撮像対象について、当該プレパラートに対する平均相対速度を算出する手順である。判定手順は、当該算出手順で算出した被撮像対象の平均相対速度を、予め定めた基準速度と比較して遅速を判定する手順である。対象抽出手順は、当該判定手段によって当該平均相対速度が当該基準速度よりも速いと判断された当該被撮像対象を、トラッキング対象候補として抽出する手順である。最後に、選択手順は、当該対象抽出手によって抽出されたトラッキング対象候補の中から使用者の選択指令又は予め定めた選択条件の満足に係る被撮像対象をトラッキング対象として選択する手順である。
請求項14の方法によれば、プレパラート内に保持された運動性物体(被撮像対象)を連続的に撮像して、それらのプレパラートに対する平均相対速度を算出する。平均相対速度がゼロであればプレパラートに対して動いていない(基準速度よりも遅い)のであるから、それは運動性物体ではないと判断してトラッキング対象から外される。さらに、その平均相対速度が基準速度よりも遅い被撮像対象も、トラッキング対象から外される。残るのは、基準速度を超える被撮像対象であるから、これらを抽出して、その中から使用者の選択指令又は予め定めた選択条件の満足に係るものをトラッキング対象としてトラッキングを行う。
本発明によれば、トラッキング障害や不鮮明画像が発生しづらく、開発・調整が行い易く、観察対象を簡単に変更でき、さらに、複雑化することなく三次元トラッキングを可能とするトラッキング装置、トラッキング顕微鏡並びにトラッキング方法を提供することができる。
以下、本発明を実施するための最良の形態(以下、適宜「本実施形態」という)について説明する。
(トラッキング顕微鏡の構造)
図1に示すのは、本実施形態に係るトラッキング装置を備えたトラッキング顕微鏡(トラッキング顕微鏡、培養顕微鏡)である。トラッキング顕微鏡1(以下、単に「顕微鏡1」という)は、顕微鏡本体3と、トラッキング装置21と、から概ね構成してある。顕微鏡本体3は、最下端に位置する脚部5と、脚部5の上部から起立し上端部が屈曲して前方(図1の手前方向)に迫り出す逆L字状のアーム部7と、光源であるランプ9と、ランプ9の光を集光する集光レンズ11と、から概略構成してある。トラッキング装置21については、次項で述べる。
図1に示すのは、本実施形態に係るトラッキング装置を備えたトラッキング顕微鏡(トラッキング顕微鏡、培養顕微鏡)である。トラッキング顕微鏡1(以下、単に「顕微鏡1」という)は、顕微鏡本体3と、トラッキング装置21と、から概ね構成してある。顕微鏡本体3は、最下端に位置する脚部5と、脚部5の上部から起立し上端部が屈曲して前方(図1の手前方向)に迫り出す逆L字状のアーム部7と、光源であるランプ9と、ランプ9の光を集光する集光レンズ11と、から概略構成してある。トラッキング装置21については、次項で述べる。
(トラッキング装置の構造)
トラッキング装置21は、対物レンズ23、撮像装置25、可動ステージ31、手動ステージ51及び制御装置81から概ね構成してある。対物レンズ23は、倍率の異なる複数のレンズを交換できるようにリボルバー式になっていて、集光レンズ11の上方領域に(被撮像物体と対向する位置に)に位置するようにアーム部7の下端に取り付けてある。撮像装置25は、対物レンズ23を介して結像された像を撮像するためのものであって、アーム部7の頂部に取り付けてある。撮像装置25には、たとえば、「プロファイルイメージャ(商標)」(浜松ホトニクス社製)と呼ばれるCMOSイメージャ等が好適である。上記CMOSイメージャの最大フレームレートは2,421frames/sである。撮像装置25によって撮像された画像は12ビットADコンバータでディジタル変換され8ビット画像として制御装置81に送られるようにしてある。モニタリングと画像データの取得のために、高速カメラによる同時撮像を行うとよい。
トラッキング装置21は、対物レンズ23、撮像装置25、可動ステージ31、手動ステージ51及び制御装置81から概ね構成してある。対物レンズ23は、倍率の異なる複数のレンズを交換できるようにリボルバー式になっていて、集光レンズ11の上方領域に(被撮像物体と対向する位置に)に位置するようにアーム部7の下端に取り付けてある。撮像装置25は、対物レンズ23を介して結像された像を撮像するためのものであって、アーム部7の頂部に取り付けてある。撮像装置25には、たとえば、「プロファイルイメージャ(商標)」(浜松ホトニクス社製)と呼ばれるCMOSイメージャ等が好適である。上記CMOSイメージャの最大フレームレートは2,421frames/sである。撮像装置25によって撮像された画像は12ビットADコンバータでディジタル変換され8ビット画像として制御装置81に送られるようにしてある。モニタリングと画像データの取得のために、高速カメラによる同時撮像を行うとよい。
可動ステージ31は、ステージ部二次元移動が可能なXYステージを採用した。可動ステージ31は、ステージ部33と、ステージ部33を駆動する駆動部35とから構成してあり、駆動部35は、制御装置で61として機能するパーソナルコンピュータによって制御するようにしてある。可動ステージ31は、その全体を手動ステージ51の上に設置してあり、手動ステージ51を手動制御することによって可動ステージ31そのものを二次元的に移動させられるようにしてある。
(制御装置の構造)
図2を参照しながら、制御装置の構造について説明する。制御装置61は、画像入力部63、画像前処理部65、画像蓄積部67、平均相対速度算出部69、速度判定部71、トラッキング候補リスト生成部73、トラッキング対象選択部75、制御司令部77およびデータ記憶部79、及びステージ制御部81から概ね構成してある。画像入力部63は、撮像装置25が撮像した画像データを取り込んで画像前処理部65に入力する機能を備えている。なお、本実施形態の制御装置61は、上述したハードウェアによって構成するものの他、汎用のパーソナルコンピュータ(図示を省略)上で動作する各種ソフトウェアの起動により実現するものであってもよい。
図2を参照しながら、制御装置の構造について説明する。制御装置61は、画像入力部63、画像前処理部65、画像蓄積部67、平均相対速度算出部69、速度判定部71、トラッキング候補リスト生成部73、トラッキング対象選択部75、制御司令部77およびデータ記憶部79、及びステージ制御部81から概ね構成してある。画像入力部63は、撮像装置25が撮像した画像データを取り込んで画像前処理部65に入力する機能を備えている。なお、本実施形態の制御装置61は、上述したハードウェアによって構成するものの他、汎用のパーソナルコンピュータ(図示を省略)上で動作する各種ソフトウェアの起動により実現するものであってもよい。
画像前処理部63は、取り込んだ画像から固定パターンノイズを除去し、除去後の画像は画像蓄積部67に蓄積される。一方、ノイズ除去後の画像は平均相対速度算出部69に送られる。平均相対速度算出部69は、予め定めた所定時間を超えて撮像され続ける(一定時間撮像範囲内に存する)被撮像対象について、当該プレパラートに対する平均相対速度を算出する算出手段として機能する。算出した平均相対速度データは、異なる被撮像対象毎にデータ記憶部79に記憶されるとともに、判定手段である速度判定部71に送られる。速度判定部71では、データ記憶部79に記憶させてある基準速度(使用者が予め設定しておく)と比較して物体の平均相対速度の基準速度に対する遅速が判定される。速度判定部71が平均相対速度が当該基準速度よりも速いと判断した当該被撮像対象のデータ(対象データ)群が抽出され、これらのデータは、対象抽出手段として機能するトラッキング候補リスト生成部73に送られる。トラッキング候補リスト生成部73は、送られた対象データ群をトラッキング候補リスト85(図3参照)の中に対象コードと関連付けて検索可能に記入する。本実施形態では、以上の処理を1秒間に1000回の割合で繰り返し行っている。トラッキング候補リスト85には、抽出された被撮像対象のそれぞれについて、対象を識別するための対象コード、プレパラート15を基準とした対象位置を示す座標、及び、基準速度よりどれだけ速いかを示す比基準速度の三者を少なくとも示すようにするとよい。トラッキング候補リスト85は、データ記憶部79に記憶されるとともに、使用者が視認できるように表示装置27に表示されるようにしてある。
平均相対速度が基準速度よりも遅い被撮像対象のデータはデータ記憶部79に記憶させた後に削除され、トラッキング候補リスト生成部73には送られない。ここで、基準速度を定め、これとの比較で平均相対速度の遅速を判定するようにしたのは、平均相対速度が基準速度よりも速いということは、その活発性を示しており、活発性ある運動性物体は健康であって被撮像対象に最も適合していると考えたからである。基準速度を下回る被撮像対象には、運動してはいるが活発ではない運動性物体と、全く動かない非運動性物体(たとえば、塵埃やプレパラートに付着した微生物)の双方が含まれるが、いずれもトラッキング対象として相応しくないので、トラッキング候補から外すようになっている。
選択手段となるトラッキング対象選択部75は、入力部29を介して入力された選択指令を受け、その選択指令に対応する被撮像対象をトラッキング候補の中から選択し、制御指令部77にその選択対象を伝達する。伝達を受けた制御指令部77は、受けた伝達に応じた制御指令をステージ制御部81に送信する。選択指令は、使用者が表示装置27を見ながら入力部29を操作して行う。本実施形態では、この使用者の操作による選択を、手動トラッキングモードによる選択という。一方、本実施形態では、手動トラッキングモードに対応する自動トラッキングモードを併せて設けてある。手動トラッキングモードと自動トラッキングモードの切り替えは、入力部29を介して行う。すなわち、入力部29は、モード切替手段としての役割をも担っている。
自動トラッキングモードに切り替えられたときのトラッキング対象選択部75は、データ記憶部79に記憶させてある選択条件(使用者が予め設定しておく)を読み出して、その選択条件とトラッキング候補リスト85に列挙された速度データとを照らし合わせてトラッキング対象を選択する。たとえば、比基準速度が最大である運動性物体や、基準速度とは別に定めた基準最高速度以下の速度で運動する運動性物体を、選択条件を満たしたものとすることができる。
手動トラッキングモード若しくは自動トラッキングモードにおいて選択された被撮像対象(トラッキング対象)を、撮像してその画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を二次元的若しくは三次元的に追跡する。これを実現するためにステージ制御部81が可動ステージ31の駆動部35を制御する。なお、制御指令部77は、上述したようにステージ制御部81に指令を送信するとともに、入力部29を介した入力に応じた状態遷移の管理を行うようになっている。
(プレパラートの固定具の構造)
図4乃至6を参照しながら、プレパラート15を可動ステージ31に固定するために固定機構37について説明する。固定機構37は、前記可動ステージ31に直接固定する固定部39と、固定部39に支持された矩形フレーム41と、から構成してある。本実施形態で採用した固定機構37は、118mm×54mm×4mmのアルミニウム板を切削して形成したため、固定部39と矩形フレーム41とが製作時から一体化されているが、別々に製作された両者が何らかの固定手段によって固定されることによって後発的に一体化されたものも、固定機構37として使用することができる。上記アルミニウム板の寸法は、72mm×22mm×??mmの一般的なプレパラートの寸法を基準にしてそれを保持するために充分な余裕を持たせるために選択した寸法であるが、本発明の目的を達成しうる範囲で異なる寸法を採用できることは言うまでもない。これと同様に、アルミニウム板以外の金属板や合成樹脂板のような他の素材によって構成された板、ならびに金属と合成樹脂のように異なる素材を組み合わせてなる板、さらには、板状以外の形状の部材をも採用可能である。
図4乃至6を参照しながら、プレパラート15を可動ステージ31に固定するために固定機構37について説明する。固定機構37は、前記可動ステージ31に直接固定する固定部39と、固定部39に支持された矩形フレーム41と、から構成してある。本実施形態で採用した固定機構37は、118mm×54mm×4mmのアルミニウム板を切削して形成したため、固定部39と矩形フレーム41とが製作時から一体化されているが、別々に製作された両者が何らかの固定手段によって固定されることによって後発的に一体化されたものも、固定機構37として使用することができる。上記アルミニウム板の寸法は、72mm×22mm×??mmの一般的なプレパラートの寸法を基準にしてそれを保持するために充分な余裕を持たせるために選択した寸法であるが、本発明の目的を達成しうる範囲で異なる寸法を採用できることは言うまでもない。これと同様に、アルミニウム板以外の金属板や合成樹脂板のような他の素材によって構成された板、ならびに金属と合成樹脂のように異なる素材を組み合わせてなる板、さらには、板状以外の形状の部材をも採用可能である。
固定部39の説明に戻る。固定部39の開放側端部には、複数(ここでは4個)のネジ孔39h,39h,..を貫通形成してあり、これらに通した固定ネジ39n,39n,..(図4参照)によって固定機構37全体を可動ステージ31に固定できるようにしてある。比率に一切の制限はないが本実施形態に係る固定部39は、固定機構37の長手方向(図5の左右方向)の略3分の2の長さを占め、残りの3分の2は矩形フレーム41によって占められている。矩形フレーム41は、開放端側に位置する支持片部42と、支持片部42と対向して対をなす支持片部43と、支持片部42と支持片部43とを連結する側片部46,46とによって矩形の4辺が構成される。この4辺に囲まれた矩形開口41hの長手寸法はプレパラート15の長手寸法L(図4参照)よりも短く形成してあり、幅寸法は同じく幅寸法Wよりも長く形成してある。長手寸法を短く形成したのは、図4に示すように、プレパラート15の両端を、後述する段部44,45に掛け渡して下方支持させられるようにするためである。幅寸法を長く形成した主たる理由は、段部44,45を形成するための幅寸法の確保にある。
支持片部42の長手方向(図5の上下方向)の略中央には、段部44を形成してある。段部44は、矩形開口41h方向に開口しており、支持片部42の上面42aから垂下する当接面42bを介して底面42cに向かって下る一方、底面42cを挟んで対向起立する両側面42d,42dによって仕切られている(図5、6参照)。図5に示す両側面42d,42d間の距離L1はプレパラート15の両端部幅寸法Wとほぼ同じか僅かに長い寸法(L1≧W)に設定してある。底面42c上に載置したプレパラート15の両端部を挟持若しくは遊びなく受け入れて幅方向位置決めを簡単に行えるようにするためである。両当接面42b,43b間の距離L2はプレパラートの長手方向寸法Lよりも長い寸法(L2>L)に設定してある。
一方、支持片部42と対向する支持片部43の長手方向(図5の上下方向)の略中央には、段部45を形成してある。段部45も段部44と同様に矩形開口41h方向に開口しており、支持片部43の上面43aから垂下する当接面43bを介して底面43cに向かって下る一方、底面43cを挟んで対向起立する両側面43d,43dによって仕切られている(図5、6参照)。図5に示すように、両側面43d,43d間の距離は、プレパラート15の両端部幅寸法Wとほぼ同じか僅かに長い寸法(L1≧W)、すなわち、L1に等しい寸法に設定してある。段部44と同様に、底面43c上に載置したプレパラート15の両端部の幅方向位置決めを簡単に行えるようにするためである。両当接面42b,43b間の距離L2はプレパラートの長手方向寸法Lよりも長い寸法(L2>L)に設定してあることは上述したが、この余剰寸法は、その分を後述する緩衝ネジの突出を許容するためである。
支持片部42には、ネジ孔42h,42hを幅方向に貫通形成してある。ネジ孔42h,42hは、緩衝ネジ48,48を支持片部42の内部を貫通させ当接面42bから進退可能に突出させるための孔である。緩衝ネジ48,48は、突出させたときに底面42c上に載置された矩形プレパラート15の端面に当接して他方の当接面43bとの間で矩形プレパラート15を挟持させるためのものである。緩衝ネジは、少なくとも2個は必要であり、それらは、支持片部42の長手方向に所定間隔離して取り付けてある。緩衝ネジ48,48は、可動ステージ31の発進停止や方向転換に伴う慣性を、その弾性変形によって和らげる機能を持っている。さらに、端面との当接による摩擦力によって矩形プレパラート15の厚み方向のズレを防止する機能も緩衝ネジ48,48は併せ持っている。これらの機能が総じて矩形プレパラートの上下振動を抑制して対物レンズの被写界深度を超えさせないようにする。このような緩衝部材としての機能を効率よく発揮させるために、緩衝ネジ48,48は、これらを合成樹脂材によって構成することが好ましい。なお、図4及び5に示すように、支持片部43の側部には切欠43cを形成してある。切欠43cは、緩衝ネジ49を横方向から差し入れるためのものであって、差し入れた緩衝ネジ49の先端はネジ孔43hを抜けて側面43dから進退可能に突出するようになっている。緩衝ネジ49の突出は、その先端を載置されたプレパラート15の端面に当接させ、当接による摩擦力によって矩形プレパラート15の厚み方向のズレを防止するためである。緩衝ネジ49は、必ずしも必須ではなく省略も可能であるが、設けることによって緩衝ネジ48,48の機能を補助する機能が期待できる。なお、緩衝ネジ49以外の緩衝ネジを設けることを妨げない。図示はしないが、プレパラート15の上面を覆う部位を形成し、その部位を貫通して同上面にと当接する緩衝ネジを設けることが考えられる。
(トラッキング装置の動作手順)
図1、2及び7を参照しながら、トラッキング装置の動作手順(トラッキング方法)について説明する。撮像装置25によって撮像された画像データは、画像入力部63によって取り込まれ(S1)、画像前処理部65によって前処理される(S3)。前処理された画像データは画像蓄積部67に送られるとともに、平均相対速度算出部69に送られる(S4)平均相対速度算出部69は、送られた画像データの中から所定時間継続して撮像されている撮像対象を特定する(S5)。すなわち、当初は存在したが途中から撮像範囲外へ出たもの、ある時点から撮像範囲に入ったが所定時間を経過していないもの、は特定外となる。このようにして特定された被撮像対象について、平均相対速度算出部69はそれらの被撮像対象各々について平均相対速度を検出して(検出手順)データ記憶部79及び速度判定部へ送る(S7)。速度判定部71は、データ記憶部79から基準速度を読み出し(S9)、読み出した基準速度と送られた平均相対速度各々とを比較してそれらの遅速を判定する。ここでは、基準速度よりも平均相対速度が速い被撮像対象をトラッキング対象候補とし、これに係る画像データのみを抽出し(対象抽出手順)、プレパラート15を基準とした位置座標(これを「対象座標」という)を把握する。把握した対象座標及び基準速度よりどれだけ速いかを示す比基準速度とともにデータ記憶部79及びトラッキング候補リスト生成部73に送る(S11)。つまり、基準速度よりも遅い平均相対速度(停止状態のものも含まれる)に係る被撮像対象は、ここで排除される。
図1、2及び7を参照しながら、トラッキング装置の動作手順(トラッキング方法)について説明する。撮像装置25によって撮像された画像データは、画像入力部63によって取り込まれ(S1)、画像前処理部65によって前処理される(S3)。前処理された画像データは画像蓄積部67に送られるとともに、平均相対速度算出部69に送られる(S4)平均相対速度算出部69は、送られた画像データの中から所定時間継続して撮像されている撮像対象を特定する(S5)。すなわち、当初は存在したが途中から撮像範囲外へ出たもの、ある時点から撮像範囲に入ったが所定時間を経過していないもの、は特定外となる。このようにして特定された被撮像対象について、平均相対速度算出部69はそれらの被撮像対象各々について平均相対速度を検出して(検出手順)データ記憶部79及び速度判定部へ送る(S7)。速度判定部71は、データ記憶部79から基準速度を読み出し(S9)、読み出した基準速度と送られた平均相対速度各々とを比較してそれらの遅速を判定する。ここでは、基準速度よりも平均相対速度が速い被撮像対象をトラッキング対象候補とし、これに係る画像データのみを抽出し(対象抽出手順)、プレパラート15を基準とした位置座標(これを「対象座標」という)を把握する。把握した対象座標及び基準速度よりどれだけ速いかを示す比基準速度とともにデータ記憶部79及びトラッキング候補リスト生成部73に送る(S11)。つまり、基準速度よりも遅い平均相対速度(停止状態のものも含まれる)に係る被撮像対象は、ここで排除される。
トラッキング候補リスト生成部73は、速度判定部71から送られた画像データ、位置座標及び比基準速度に基づいてトラッキング候補リスト85(図3参照)を生成する(S13)。作成されたトラッキング候補リスト85のデータはデータ記憶部79に記憶され(S14)、また同時に、表示装置27に表示される(S15)。表示装置27に表示させるのは、使用者が被撮像対象の特定を行えるようにするためである。
トラッキング対象選択部75は、手動トラッキングモードなのか自動トラッキングモードなのかを確認し、手動トラッキングモードに切り替えられているときはS19へ進み、自動トラッキングモードに切り替えられているときはS41へ進む(S17)。S19において、選択指令を待ち選択指令があったときは、その選択指令に係る被撮像対象を選択し(選択手順)トラッキング制御部77に伝達する(S21)。伝達を受けたトラッキング制御部77は、選択された被撮像対象をトラッキングさせるための指令を可動ステージ31(駆動部35)に送り、ビジュアルフィードバックによる二次元的トラッキングを行わせる(S23)。上記選択手順では、表示手段として機能する表示部27上において使用者が選択したポイントの座標を示すポイント座標を把握し、当該ポイント座標を把握した時点で当該ポイント座標と最も近い座標に係る被撮像対象をトラッキング対象として選択する。トラッキング途中で被撮像対象を見失わない限り、そのままトラッキングを続け(S25)、終了の指示を受けたところでトラッキングを終了する(S27)。終了の指示は、入力部29からの終了指令による。S25に戻りトラッキング途中で被撮像対象を見失ったときはS19へ戻り、新たな被撮像対象の選択を待つ。
S17に戻り、自動トラッキングモードに切り替えられていたときのトラッキング対象選択部75は、データ記憶部79から選択条件を読み出し(S41)、その読み出した選択条件をトラッキング候補リストに列記されたトラッキング候補各々の比基準速度に照らし合わせ、選択条件に最適なトラッキング対象を選択しトラッキング制御部77に伝達する(S43)。トラッキング制御部77は、トラッキング途中で被撮像対象を見失わない限り、そのままトラッキングを続け(S45、S47、終了の指示を受けたところでトラッキングを終了する(S27)。終了の指示は、入力部29からの終了指令による。S47に戻りトラッキング途中で被撮像対象を見失ったときはS41へ戻り、新たな被撮像対象の選択を待つ。なお、手動であると自動であるとに関わらず、上記トラッキングは二次元トラッキングを前提としているが、三次元トラッキングトラッキングとしてもよいことは言うまでもない。
(本実施形態の変形例)
図8乃至10を参照しながら、本実施形態の変形例(以下、「本変形例」という)について説明する。本変形例では、図8及び9を参照しながら、本実施形態の対物レンズ23の変形例を示す。
図8乃至10を参照しながら、本実施形態の変形例(以下、「本変形例」という)について説明する。本変形例では、図8及び9を参照しながら、本実施形態の対物レンズ23の変形例を示す。
可変焦点レンズ91は、収容部94と、駆動部101と、第1媒質103と、第2媒質104と、制御部105と、駆動ステージ106と、を備えている。収容部94は、収容空間95と、第1壁部96と、第2壁部13と、仕切部98を備えている。
収容空間95は、第1壁部96と第2壁部13との間に配置されている。さらに、第1壁部96と第2壁部13とは、収容空間95を挟んで対向するように配置してある。
第1壁部96は、光を透過させる第1窓部96aを備えている。第2壁部13は、第1窓部96aを透過した光をさらに透過させる第2窓部97aを備えている。第1窓部96a及び第2窓部97aは、例えば、第1壁部96及び第2壁部13に貫通孔を形成した後、この部分に透明なガラスをはめ込むことにより構成することができる。
仕切部98は、収容空間95を仕切ることで、第1空間95aと第2空間95bとを形成する構成となっている。仕切部98は、本変形例では、平板状に構成されている。仕切部98は、第1表面98aと、貫通孔98bとを備えている。本変形例では、仕切部98の上面(図8参照)が第1表面98aを構成している。これにより、第1表面98aは、仕切部98の表面における少なくとも一部を構成するものとなっている。
第1表面98aは、一つの仮想的な平坦面内に配置されている。すなわち、第1表面98aは、一つの仮想的な平坦面の一部をなす形状となっている。図8では、第1表面98aが、仕切部98の上面総てと一致している。しかしながら、後述するように、第1表面98aは、貫通孔98bの周囲のみに存在すればよく、その面積はごく微少であっても良い。
貫通孔98bは、第1表面98aを貫通し、かつ、仕切部98を貫通するように形成してある。貫通孔98bは、横断面において円形となる円筒形状に形成してある。貫通孔98bの大きさは、用途に応じて適宜に設定できる。本実施形態では、貫通孔98bとして、直径3.000±0.0001mm程度の大きさ及び加工誤差を想定しているが、これはあくまで一例である。また、貫通孔98bをアレイ状に多数形成することも可能であるが、本変形例では一つの貫通孔98bについて説明する。
貫通孔98bは、第1窓部96aを透過した光が第2窓部97aに向かう光路上に配置されている(図8参照)。貫通孔98bは、第1窓部96aを透過させる構成となっている。貫通孔98bの開口端を構成する周縁部98cは、第1表面98aの端部に配置してある。具体的には、本変形例においては、周縁部98cは、第1表面98aと、貫通孔98bの内周面との交線によって構成してある。周縁部98cの形状は、一般的には真円であることが好ましいが、必要となるレンズの形状に応じて、例えば楕円形とすることも原理的には可能である。
第1媒質103と第2媒質104とは、接触状態において互いに混合しない材質にしてある。第1媒質103と第2媒質104の屈折率は、互いに異なるものにしてある。このような媒質の組み合わせは、適宜選択しうるが、例えば、PDMS(Poly-Dimethyl-Siloxane)と純水の組み合わせを用いることができる。屈折率はそれぞれ1.40と1.33である。どちらを第1媒質103としてもよい。
この明細書の説明では、特に説明がない限り、第1媒質103の屈折率(n1)よりも第2媒質104の屈折率(n2)が小さい(つまりn1>n2である)と仮定する。ただし、屈折率の大小関係を、これとは逆にすることは可能である。
この例では、第1媒質103及び第2媒質104として液体が用いられている。ただし、これらの媒質としては、液体以外に、ゾル状、ゲル状、弾性体などの状態であることも可能である。要するに、媒質としては、駆動部101から受けた押圧カの変化を、両媒質間の界面に作用させて、この界面の形状を変化させることができるものであればよい。
第1媒質103は、第1空間95a中に収容されている。同様に、第2媒質104は、第2空間95b中に収容されている。もちろん、第2媒質104を第1空間95aに収容することも可能であるが、説明の便宜上、本明細書では、第1空間95aに収容される媒質を第1媒質と名付けている。
収容空間95に収容された状態においては、第1媒質103と第2媒質104とは、互いに接触させてある。この接触状態における、第1媒質103と第2媒質104との間における界面107の外周は、貫通孔98bにおける周縁部98cに位置している(図3参照)。
また、第1媒質103の密度と、第2媒質104の密度とは、実質的に等しいものにしてある。駆動部101は、第1媒質103又は第2媒質104の圧カ又は体積を変動させることにより、界面107の曲率を変化させる構成にしてある。
本変形例では、駆動部101は、積層構造のピエゾ素子102を主体として構成してある。ピエゾ素子は、印加電圧に応じて形状を変化させる圧電素子である。交流電圧を印加することにより、ピエゾ素子の形状を周期的に伸縮させることができる。このような駆動部101の構成は、前記した非特許文献6及び7に示されているものと墓本的に同様でよいので、詳しい説明は省略する。
また、この本変形例では、駆動部101は、第1媒質103に対して、周期的な圧カ変動を加える構成となっている。もちろん、第2媒質104に対して圧カ変動を加える構成とすることも可能である。
制御部105は、駆動信号を駆動部101に送ることによって、駆動部101の動作を制御する構成となっている。制御部105における駆動信号は、予め入力されたデータに従って生成されても良いし、レンズにより得られた像の解析に基づいて動的に生成されても良い。
駆動ステージ106は、第1媒質103に対する駆動部101の位置あるいは姿勢を調整するための機構である。このような駆動ステージ106は、例えば、駆動部101を固定するテーブルと、このテーブルを3次元方向に位置決めできるアクチュエータ(いずれも図示せず)によって容易に構成することができるので、詳しい説明は省略する。
(本実施形態の可変焦点レンズの製造方法)
次に、本実施形態に係る可変焦点レンズ91を製造する方法の概要を、図10に示すフローチャートに基づいて説明する。
次に、本実施形態に係る可変焦点レンズ91を製造する方法の概要を、図10に示すフローチャートに基づいて説明する。
(ステップSA-1)
まず、平板状の仕切部98を用意する。ついで、この仕切部98の表面を平坦面に加工する。表面の平坦度は、高い方が好ましい。平坦度を上げる方法としては、例えば、半導体墓板を製造する際に用いられるポリッシング加工がある。つまり、平坦度を上げる方法は、半導体製造プロセスなどの技術において確立されているので、それを用いれば、比較的に容易に、高い平坦度を達成することができる。
まず、平板状の仕切部98を用意する。ついで、この仕切部98の表面を平坦面に加工する。表面の平坦度は、高い方が好ましい。平坦度を上げる方法としては、例えば、半導体墓板を製造する際に用いられるポリッシング加工がある。つまり、平坦度を上げる方法は、半導体製造プロセスなどの技術において確立されているので、それを用いれば、比較的に容易に、高い平坦度を達成することができる。
本変形例では、このように形成された平坦面を、仕切部98における第1表面98aとすることができる。本変形例では、第1表面98aを平坦面としたので、高い加工精度(つまり高い平坦度)の第1表面98aを、比較的容易に得ることができる。
(ステップSA-2)
ついで、仕切部98に対して穴開けを行い、貫通孔98bを形成する。穴開けの具体的方法としては、例えばフォトリソグラフィを用いたエッチング加工がある。この加工方法の一例を以下に示す。
ついで、仕切部98に対して穴開けを行い、貫通孔98bを形成する。穴開けの具体的方法としては、例えばフォトリソグラフィを用いたエッチング加工がある。この加工方法の一例を以下に示す。
この方法では、まず、基板(例えばSi基板)の表面に、マスク部(例えばSiO2膜)を形成する(図示せず)。ついで、マスク部の表面にフォトレジスト(感光剤)を塗布した後、フォトレジストを所定のパターンで感光させる。その後、感光したフォトレジスト(あるいは逆に感光していないフォトレジスト)を除去する。その後、フォトレジストに転写されたパターンに基づいて、マスク部をエッチングで除去する。さらに、マスク部が除去された部分における基板をエッチングで除去する。このようにして、貫通孔98bを形成することができる。
本実施形態では、仕切部98に対して第1表面98aを形成し、これを貫通するように貫通孔98bを形成する。このため、この技術では、貫通孔98bを形成するために、フォトリソグラフィのような、高い加工精度を得られる技術を適用することができる。すなわち、本実施形態によれば、貫通孔98bの加工精度をきわめて高くすることができる。
従来の技術(非特許文献6及び7)に記載のものでは、既に述べたように、貫通孔の周縁部近傍が傾斜面(円錐面)となっている。このため、従来の技術では、フォトリソグラフィのようなMEMS技術を用いて貫通孔を形成することが難しく、貫通孔周縁部の加工精度が低くなりやすいという間題があった。貫通孔の周縁部の形状における寸法誤差は、得られるレンズ面の精度に影響するため、従来のレンズでは、解像度の向上が困難であった。
これに対して、本実施形態の技術では、仕切部98に平坦な第1表面98aを形成し、これを貫通するように貫通孔98bを形成したので、貫通孔98bの加工精度を高くすることができる。このため、この技術では、貫通孔工42の周縁部98cの寸法精度を高くすることが容易になる。
よって、本実施形態の可変焦点レンズ91によれば、界面107によって形成されるレンズ面を精度良く形成することができる。このため、この可変焦点レンズ91によれば、レンズの解像度を向上させることができるという利点がある。
なお、以上において説明した動作に鑑みると、第1表面98aは、周縁部98cを構成することに寄与していればよい。つまり、第1表面98aは、周縁部98cの構成に寄与しない部分においては、平坦でない形状に加工されても良い。例えば、第1表面98aを平坦に加工した後、他の形状に加工することも可能である。また、第1表面98aの上に他の部材を積層することも可能である。
(ステップSA-3)
ついで、仕切部98を、収容部94における収容区間11に取り付け(図2参照)、これによって、第1空間95aと第2空間95bとを形成する。その後、まず、第1空間95aに、第1媒質103を充填する。すると、第1媒質103の液面が徐々に上昇し、貫通孔98bの内側に達する。貫通孔98bの内側においても、液面はさらに上昇して、周縁部98cに達する。作業者は、液面が上昇する間、特に、貫通孔98bの内側に達した後は、第1媒質103の液面で反射される光学像を観察する。
ついで、仕切部98を、収容部94における収容区間11に取り付け(図2参照)、これによって、第1空間95aと第2空間95bとを形成する。その後、まず、第1空間95aに、第1媒質103を充填する。すると、第1媒質103の液面が徐々に上昇し、貫通孔98bの内側に達する。貫通孔98bの内側においても、液面はさらに上昇して、周縁部98cに達する。作業者は、液面が上昇する間、特に、貫通孔98bの内側に達した後は、第1媒質103の液面で反射される光学像を観察する。
(ステップSA-4)
そして、第1媒質103の液面で反射される光学像の倍率が大きく変化した時点で、液面が周縁部98cに到達したと判断する。その時点で、第1媒質103の充填を停止する。
そして、第1媒質103の液面で反射される光学像の倍率が大きく変化した時点で、液面が周縁部98cに到達したと判断する。その時点で、第1媒質103の充填を停止する。
一般に、第1媒質103が貫通孔98bの内側において上昇する場合、その液面の形状は、貫通孔内周面と第1媒質103とで決定される接触角によって規定される。このため、基本的には、液面での反射により観察される光学像は変化しない。
しかし、一旦、液面が周縁部98cに達すると、液面外周の位置は、周縁部98cに固定される。この状態で液面が上昇すると、液面の曲率が大きく変化する。例えば、凹面状であった液面が、凸面状に変化する。すると、液面における反射像の倍率が大きく変化し、観察者に視認される。もちろん、この視認は、直接肉眼によることも可能であるが、レンズが微少である場合は、顕微鏡を介して行うことができる。
したがって、反射像の倍率が大きく変化で、第1媒質103の充填を停止すれば、液面外周の位置を、周縁部98cに撃実に一致させることができる。よって、この点からも、周縁部98cによって規定されるレンズ形状の精度を高めることができるという利点がある。
(ステップSA-5)
ついで、第2媒質104を、第2空間95bに充填する。これにより、第2媒質104を、第1媒質103の上部に接触した状態で配置することができる。この状態では、第1媒質103と第2媒質104との接触部分に界面107(図8参照)が形成される。その後、駆動部101を収容部94に取り付けることにより、可変焦点レンズを得ることができる。前記以外の具体的な製造方法は、非特許文献6及び7に記載の技術と同様でよいので、これ以上詳しい説明は省略する。
ついで、第2媒質104を、第2空間95bに充填する。これにより、第2媒質104を、第1媒質103の上部に接触した状態で配置することができる。この状態では、第1媒質103と第2媒質104との接触部分に界面107(図8参照)が形成される。その後、駆動部101を収容部94に取り付けることにより、可変焦点レンズを得ることができる。前記以外の具体的な製造方法は、非特許文献6及び7に記載の技術と同様でよいので、これ以上詳しい説明は省略する。
(可変焦点レンズの動作)
次に、本実施形態に係る可変焦点レンズの動作を説明する。初期状態において、界面107でのレンズ作用による焦点の位置を、図2において符号Fで表す。
次に、本実施形態に係る可変焦点レンズの動作を説明する。初期状態において、界面107でのレンズ作用による焦点の位置を、図2において符号Fで表す。
ついで、駆動部101を駆動することにより、第1媒質103を押圧して、界面107を上方に突出させる。すると、界面40の周囲が、貫通孔98bの周縁部98cに接触したままの状態で、界面107が、図2において上方に膨出する(図2において破線で示す)。これにより、界面107でのレンズ作用による焦点の位置は、図2において符号F’で示される位置に変化する。本変形例によれば、このようにして、可変焦点レンズを得ることができる。
本変形例のレンズでは、界面107の形状、すなわちレンズ面の形状を、きわめて高精度とすることができるので、可変焦点レンズでありながら、高い解像度を得ることができるという利点がある。
第1媒質103への押圧を解除することにより、焦点の位置を初期状態に復帰させることができる。もちろん、第1媒質103への押圧量を調整することにより、焦点距離を適宜に調整することができる。
本変形例では、駆動部101としてピエゾ素子を用いているので、例えば1kHz程度の高い周波数で、焦点距離を変化させることが可能である。
また、本変形例では、第1媒質103及び第2媒質104として、液体を用いているので、媒質そのものの圧縮量が小さい。このため、第1媒質103への押圧カを直ちに第2媒質104に伝達することができる。この点からも、本実施形態のレンズでは、高い動作周波数を達成することができる。
さらに、本変形例では、第1媒質103の密度と、第2媒質104の密度とを実質的に一致させている。両媒質の密度が異なると、レンズの姿勢が変化した場合(例えばレンズの天地方向が反転した場合)には、重力の影響により、界面107の形状が変化する。例えば、界面形状に偏りが生じて偏心するというような現象を生じる。これに対して、本実施形態では、両媒質の密度を一致させているので、このような場合でも、界面107の形状が変化しないという利点がある。
1 トラッキング顕微鏡
3 顕微鏡本体
5 脚部
7 アーム部
9 ランプ
11 集光レンズ
15 プレパラート
17 高速カメラ
21 トラッキング装置
23 対物レンズ
25 撮像装置
27 表示部
29 入力部
31 可動ステージ
33 ステージ部
35 駆動部
37 固定機構
39 固定部
39a ネジ
39h ネジ孔
41 矩形フレーム
41h 矩形開口
42 支持片部
43 支持片部
43c 切欠
44 段部
45 段部
46 側片部
48 ネジ
49 ネジ
51 手動ステージ
61 制御装置
63 画像入力部
65 画像前処理部
67 画像蓄積部
69 平均相対速度算出部
71 速度比較部
73 トラッキング候補リスト生成部
75 トラッキング対象選択部
77 トラッキング制御部
79 データ記憶部
81 ステージ制御部
85 トラッキング候補リスト
91 可変焦点レンズ
94 収容部
95 収容空間
95a 第1空間
95b 第2空間
96 第1壁部
96a 第1窓部
97 第2壁部
97a 第2窓部
98 仕切部
98a 第1表面
98b 貫通孔
98c 周縁部
101 駆動部
102 ペエゾ素子
103 第1媒質
104 第2媒質
105 制御部
106 駆動ステージ
107 界面
3 顕微鏡本体
5 脚部
7 アーム部
9 ランプ
11 集光レンズ
15 プレパラート
17 高速カメラ
21 トラッキング装置
23 対物レンズ
25 撮像装置
27 表示部
29 入力部
31 可動ステージ
33 ステージ部
35 駆動部
37 固定機構
39 固定部
39a ネジ
39h ネジ孔
41 矩形フレーム
41h 矩形開口
42 支持片部
43 支持片部
43c 切欠
44 段部
45 段部
46 側片部
48 ネジ
49 ネジ
51 手動ステージ
61 制御装置
63 画像入力部
65 画像前処理部
67 画像蓄積部
69 平均相対速度算出部
71 速度比較部
73 トラッキング候補リスト生成部
75 トラッキング対象選択部
77 トラッキング制御部
79 データ記憶部
81 ステージ制御部
85 トラッキング候補リスト
91 可変焦点レンズ
94 収容部
95 収容空間
95a 第1空間
95b 第2空間
96 第1壁部
96a 第1窓部
97 第2壁部
97a 第2窓部
98 仕切部
98a 第1表面
98b 貫通孔
98c 周縁部
101 駆動部
102 ペエゾ素子
103 第1媒質
104 第2媒質
105 制御部
106 駆動ステージ
107 界面
Claims (14)
- 運動性物体を保持する矩形プレパラートと、
当該矩形プレパラートを、固定機構を介して固定した可動ステージと、
当該矩形プレパラートに対して対向配置した対物レンズと、
当該対物レンズにより結像された運動性物体の像を撮像する撮像装置と、
当該撮像装置が撮像した運動性物体の像を可視表示する表示装置と、
当該撮像装置に撮像された物体画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を二次元的若しくは三次元的に追跡するために当該可動ステージを制御する制御装置と、
を備えるトラッキング装置において、
当該制御装置が、
予め定めた所定時間を超えて撮像され続ける被撮像対象について、
当該プレパラートに対する個々の相対移動を検出する検出手段と、
当該検出手段によって相対移動が検出された当該被撮像対象を、トラッキング対象候補として抽出する対象抽出手段と、
当該対象抽出手によって抽出され当該表示手段に表示されたトラッキング対象候補の中から使用者が選択した被撮像対象をトラッキング対象として選択する選択手段と、
を有することを特徴とするトラッキング装置。 - 前記対象抽出手段が、トラッキング対象候補とした被撮像対象各々の座標を示す対象座標を把握するように構成してあり、
前記選択手段が、当該表示手段上において使用者が選択したポイントの座標を示すポイント座標を把握するように構成してあり、
前記選択手段が、当該ポイント座標が把握された時点で当該ポイント座標と最も近い座標に係る被撮像対象をトラッキング対象として選択するように構成してある
ことを特徴とする請求項1記載のトラッキング装置。 - 運動性物体を保持する矩形プレパラートと、
当該矩形プレパラートを、固定機構を介して固定した可動ステージと、
当該矩形プレパラートに対して対向配置した対物レンズと、
当該対物レンズにより結像された運動性物体の像を撮像する撮像装置と、
当該撮像装置が撮像した運動性物体の像を可視表示する表示装置と、
当該撮像装置に撮像された物体画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を二次元的若しくは三次元的に追跡するために当該可動ステージを制御する制御装置と、
を備えるトラッキング装置において、
当該制御装置が、
予め定めた所定時間を超えて撮像され続ける被撮像対象について、当該プレパラートに対する平均相対速度を算出する算出手段と、
当該算出手段が算出した被撮像対象の平均相対速度を、予め定めた基準速度と比較して遅速を判定する判定手段と、
当該判定手段によって当該平均相対速度が当該基準速度よりも速いと判断された当該被撮像対象を、トラッキング対象候補として抽出する対象抽出手段と、
当該対象抽出手によって抽出されたトラッキング対象候補の中から使用者の選択指令又は予め定めた選択条件の満足に係る被撮像対象をトラッキング対象として選択する選択手段と、
を有することを特徴とするトラッキング装置。 - 運動性物体を保持する矩形プレパラートと、
当該矩形プレパラートを、固定機構を介して固定した可動ステージと、
当該矩形プレパラートに対して対向配置した対物レンズと、
当該対物レンズにより結像された運動性物体の像を撮像する撮像装置と、
当該撮像装置に撮像された物体画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を二次元的若しくは三次元的に追跡するために当該可動ステージを制御する制御装置と、
を備えるトラッキング装置において、
当該制御装置が、
被撮像対象を任意に指定するための対象指定手段と、
当該対象指定手段によって指定された被撮像対象をトラッキング対象として選択する対象選択手段と、
を有することを特徴とするトラッキング装置。 - 運動性物体を保持する矩形プレパラートと、
当該矩形プレパラートを、固定機構を介して固定した可動ステージと、
当該矩形プレパラートに対して対向配置した対物レンズと、
当該対物レンズにより結像された運動性物体の像を撮像する撮像装置と、
当該撮像装置に撮像された物体画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を二次元的若しくは三次元的に追跡するために当該可動ステージを制御する制御装置と、
を備えるトラッキング装置において、
当該制御装置が、
予め定めた所定時間を超えて撮像され続ける被撮像対象について、当該チャンバーに対する平均相対速度を算出する算出手段と、
当該算出手段が算出した被撮像対象の平均相対速度を、予め定めた基準速度と比較して遅速を判定する判定手段と、
当該判定手段によって当該平均相対速度が当該基準速度よりも速いと判断された当該被撮像対象を、トラッキング対象候補として抽出する対象抽出手段と、
当該対象抽出手によって抽出されたトラッキング対象候補の中から使用者の選択指令又は予め定めた選択条件の満足に係る被撮像対象を択一的に選択する選択手段と、
手動トラッキングモードと自動トラッキングモードとを切り替えるためのモード切替手段と、を含めて構成してあり、
当該選択手段の選択が、当該モード切替手段が手動トラッキングモードに切り替えられたときは使用者の選択指令に従って、かつ、当該モード切替手段が自動トラッキングモードに切り替えられたときは予め定めた選択条件の満足に従って被撮像対象をトラッキング対象として選択するように構成してある
ことを特徴とするトラッキング装置。 - 前記固定機構が、前記可動ステージに直接固定する固定部と、当該固定部に支持された矩形フレームと、から構成してあり、
当該矩形フレームが、矩形プレパラートの長手方向両端部を下方支持する一対の支持片部を含めて構成してあり、
当該支持片部各々には、当該矩形プレパラート両端部各々を受け入れるために上面から垂下する当接面を介して底面に向かって下る一方、当該底面を挟んで対向起立する両側面によって仕切られた段部を形成してあり、
当該両側面間の距離が当該矩形プレパラートの当該両端部幅方向の位置決めのために当該両端部幅寸法とほぼ同じく、かつ、両当接面間の距離が当該矩形プレパラートの長手方向寸法よりも長く設定してあり、
当該支持片部のうち何れか一方には、内部を貫通して当該当接面から突出させたときに載置した矩形プレパラートの端面に当接して他方の当接面との間で当該矩形プレパラートを挟持する少なくとも2個の緩衝ネジを当該支持片部長手方向に離して進退可能に取り付けてある
ことを特徴とする請求項1乃至5いずれか記載のトラッキング装置。 - 前記緩衝ネジが、合成樹脂材によって構成してある
ことを特徴とする請求項6記載のトラッキング装置。 - 前記可動ステージが、手動ステージの上に設置してあり、
当該手動ステージを移動させることによって当該可動ステージを移動させられるように構成してある
ことを特徴とする請求項1乃至7何れか記載のトラッキング装置。 - 前記制御装置が、復帰可能にトラッキング停止できるように構成してある
ことを特徴とする請求項8記載のトラッキング装置。 - 前記対物レンズが、可変焦点レンズを含めて構成してある
ことを特徴とする請求項1乃至8いずれか記載のトラッキング装置。 - 請求項1乃至10何れかのトラッキング装置を含めて構成してある
ことを特徴とするトラッキング顕微鏡。 - プレパラートに保持された運動性物体の撮像画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を追跡するトラッキング方法において、
予め定めた所定時間を超えて撮像され続ける被撮像対象について、当該プレパラートに対する個々の相対移動を検出する検出手順と、
当該検出手順で相対移動が検出された当該被撮像対象を、トラッキング対象候補として抽出する対象抽出手順と、
当該対象抽出手によって抽出され表示手段に表示されたトラッキング対象候補の中から使用者が選択した被撮像対象をトラッキング対象として選択する選択手順と、
を有することを特徴とするトラッキング方法。 - 前記対象抽出手順では、トラッキング対象候補とした被撮像対象各々の座標を示す対象座標を把握し、
前記選択手順では、当該表示手段上において使用者が選択したポイントの座標を示すポイント座標を把握し、当該ポイント座標を把握した時点で当該ポイント座標と最も近い座標に係る被撮像対象をトラッキング対象として選択する
ことを特徴とする請求項12記載のトラッキング方法。 - プレパラートに保持された運動性物体の撮像画像に対しビジュアルフィードバックを行うことで撮像された運動性物体を二次元的若しくは三次元的に追跡するトラッキング方法において、
予め定めた所定時間を超えて撮像され続ける被撮像対象について、当該プレパラートに対する平均相対速度を算出する算出手順と、
当該算出手順で算出した被撮像対象の平均相対速度を、予め定めた基準速度と比較して遅速を判定する判定手順と、
当該判定手段によって当該平均相対速度が当該基準速度よりも速いと判断された当該被撮像対象を、トラッキング対象候補として抽出する対象抽出手順と、
当該対象抽出手によって抽出されたトラッキング対象候補の中から使用者の選択指令又は予め定めた選択条件の満足に係る被撮像対象をトラッキング対象として選択する選択手順と、
を有することを特徴とするトラッキング方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009093648A JP5263886B2 (ja) | 2009-04-08 | 2009-04-08 | トラッキング装置およびこのトラッキング装置を備えたトラッキング顕微鏡並びにトラッキング方法 |
| JP2009-093648 | 2009-04-08 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2010116912A1 true WO2010116912A1 (ja) | 2010-10-14 |
Family
ID=42936197
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2010/055514 WO2010116912A1 (ja) | 2009-04-08 | 2010-03-29 | トラッキング装置およびこのトラッキング装置を備えたトラッキング顕微鏡並びにトラッキング方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP5263886B2 (ja) |
| WO (1) | WO2010116912A1 (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020080355A1 (ja) | 2018-10-17 | 2020-04-23 | 富士フイルム株式会社 | 投映像表示用部材、ウインドシールドガラスおよびヘッドアップディスプレイシステム |
| WO2020122023A1 (ja) | 2018-12-10 | 2020-06-18 | 富士フイルム株式会社 | 投映像表示用部材、ウインドシールドガラスおよびヘッドアップディスプレイシステム |
| WO2021200652A1 (ja) | 2020-03-30 | 2021-10-07 | 富士フイルム株式会社 | 直線偏光反射フィルム、ウインドシールドガラスおよびヘッドアップディスプレイシステム |
| WO2021200655A1 (ja) | 2020-03-30 | 2021-10-07 | 富士フイルム株式会社 | 反射フィルム、ウインドシールドガラスおよびヘッドアップディスプレイシステム |
| WO2021246402A1 (ja) | 2020-06-03 | 2021-12-09 | 富士フイルム株式会社 | 反射フィルム、合わせガラスの製造方法、および、合わせガラス |
| WO2022075184A1 (ja) | 2020-10-09 | 2022-04-14 | 富士フイルム株式会社 | 反射フィルム、ウインドシールドガラス、および、ヘッドアップディスプレイシステム |
| WO2022123946A1 (ja) | 2020-12-09 | 2022-06-16 | 富士フイルム株式会社 | 反射フィルム、ウインドシールドガラスおよびヘッドアップディスプレイシステム |
| WO2022270222A1 (ja) | 2021-06-21 | 2022-12-29 | 富士フイルム株式会社 | 画像投影システム |
| WO2023054324A1 (ja) | 2021-09-30 | 2023-04-06 | 富士フイルム株式会社 | ヘッドアップディスプレイシステム及び輸送機 |
| WO2023080115A1 (ja) | 2021-11-05 | 2023-05-11 | 富士フイルム株式会社 | 虚像表示装置、ヘッドアップディスプレイシステム及び輸送機 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9584725B2 (en) | 2014-06-03 | 2017-02-28 | Xiaomi Inc. | Method and terminal device for shooting control |
| CN104065878B (zh) * | 2014-06-03 | 2016-02-24 | 小米科技有限责任公司 | 拍摄控制方法、装置及终端 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006190121A (ja) * | 2005-01-07 | 2006-07-20 | Nikon Corp | トラッキング装置およびトラッキング方法、並びに、このトラッキング装置を備えた生物顕微鏡 |
| JP2006223761A (ja) * | 2005-02-21 | 2006-08-31 | Minoru Tomita | 生体構成要素速度測定装置、及びそのプログラム |
| WO2007066684A1 (ja) * | 2005-12-07 | 2007-06-14 | Effector Cell Institute, Inc. | 細胞運動計測方法およびシステム |
| JP2007279315A (ja) * | 2006-04-05 | 2007-10-25 | Olympus Corp | 顕微鏡ステージ機構 |
| JP2007334746A (ja) * | 2006-06-16 | 2007-12-27 | Olympus Corp | 画像処理装置および画像処理プログラム |
| JP2008281720A (ja) * | 2007-05-09 | 2008-11-20 | Japan Science & Technology Agency | 顕微鏡装置 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3856171B2 (ja) * | 1997-10-09 | 2006-12-13 | 株式会社ニコン | 標本ホルダ付き顕微鏡ステージ |
| JP2006113462A (ja) * | 2004-10-18 | 2006-04-27 | Tohoku Univ | 単粒子三次元位置追跡方法 |
-
2009
- 2009-04-08 JP JP2009093648A patent/JP5263886B2/ja active Active
-
2010
- 2010-03-29 WO PCT/JP2010/055514 patent/WO2010116912A1/ja active Application Filing
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006190121A (ja) * | 2005-01-07 | 2006-07-20 | Nikon Corp | トラッキング装置およびトラッキング方法、並びに、このトラッキング装置を備えた生物顕微鏡 |
| JP2006223761A (ja) * | 2005-02-21 | 2006-08-31 | Minoru Tomita | 生体構成要素速度測定装置、及びそのプログラム |
| WO2007066684A1 (ja) * | 2005-12-07 | 2007-06-14 | Effector Cell Institute, Inc. | 細胞運動計測方法およびシステム |
| JP2007279315A (ja) * | 2006-04-05 | 2007-10-25 | Olympus Corp | 顕微鏡ステージ機構 |
| JP2007334746A (ja) * | 2006-06-16 | 2007-12-27 | Olympus Corp | 画像処理装置および画像処理プログラム |
| JP2008281720A (ja) * | 2007-05-09 | 2008-11-20 | Japan Science & Technology Agency | 顕微鏡装置 |
Non-Patent Citations (1)
| Title |
|---|
| "Lasers and Electro-Optics Society, 2006. LEOS 2006. 19th Annual Meeting of the IEEE", 2006, article HIROMASA OKU ET AL.: "Rapid Liquid Variable-Focus Lens with 2-ms Response", pages: 947 - 948 * |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020080355A1 (ja) | 2018-10-17 | 2020-04-23 | 富士フイルム株式会社 | 投映像表示用部材、ウインドシールドガラスおよびヘッドアップディスプレイシステム |
| WO2020122023A1 (ja) | 2018-12-10 | 2020-06-18 | 富士フイルム株式会社 | 投映像表示用部材、ウインドシールドガラスおよびヘッドアップディスプレイシステム |
| WO2021200652A1 (ja) | 2020-03-30 | 2021-10-07 | 富士フイルム株式会社 | 直線偏光反射フィルム、ウインドシールドガラスおよびヘッドアップディスプレイシステム |
| WO2021200655A1 (ja) | 2020-03-30 | 2021-10-07 | 富士フイルム株式会社 | 反射フィルム、ウインドシールドガラスおよびヘッドアップディスプレイシステム |
| WO2021246402A1 (ja) | 2020-06-03 | 2021-12-09 | 富士フイルム株式会社 | 反射フィルム、合わせガラスの製造方法、および、合わせガラス |
| WO2022075184A1 (ja) | 2020-10-09 | 2022-04-14 | 富士フイルム株式会社 | 反射フィルム、ウインドシールドガラス、および、ヘッドアップディスプレイシステム |
| WO2022123946A1 (ja) | 2020-12-09 | 2022-06-16 | 富士フイルム株式会社 | 反射フィルム、ウインドシールドガラスおよびヘッドアップディスプレイシステム |
| WO2022270222A1 (ja) | 2021-06-21 | 2022-12-29 | 富士フイルム株式会社 | 画像投影システム |
| WO2023054324A1 (ja) | 2021-09-30 | 2023-04-06 | 富士フイルム株式会社 | ヘッドアップディスプレイシステム及び輸送機 |
| WO2023080115A1 (ja) | 2021-11-05 | 2023-05-11 | 富士フイルム株式会社 | 虚像表示装置、ヘッドアップディスプレイシステム及び輸送機 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010243868A (ja) | 2010-10-28 |
| JP5263886B2 (ja) | 2013-08-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5263886B2 (ja) | トラッキング装置およびこのトラッキング装置を備えたトラッキング顕微鏡並びにトラッキング方法 | |
| CN103765277B (zh) | 使用误差信号的聚焦和成像系统以及技术 | |
| US10330906B2 (en) | Imaging assemblies with rapid sample auto-focusing | |
| JP6158197B2 (ja) | 自動化された顕微鏡使用のための多関数型自動焦点システムおよび方法 | |
| US20130229493A1 (en) | Three-dimensional confocal microscopy apparatus and focal plane scanning and aberration correction unit | |
| WO2007124437A2 (en) | Objective-coupled selective plane illumination microscopy | |
| US20070122143A1 (en) | Intermittent photo-taking device | |
| US11156822B2 (en) | Selective plane illumination microscopy with multiple illumination units scanning an object in sync with a digital camera rolling shutter | |
| WO2021057422A1 (zh) | 显微镜系统、智能医疗设备、自动对焦方法和存储介质 | |
| US9906729B2 (en) | Imaging apparatus and microscope system | |
| WO2014041820A1 (ja) | 顕微鏡 | |
| JP6749648B2 (ja) | 顕微鏡用光学モジュール、顕微鏡、顕微鏡用光学モジュール制御装置及び多光子励起顕微鏡 | |
| JP2023036742A (ja) | マニピュレーションシステム及びマニピュレーションシステムの駆動方法 | |
| KR20200054255A (ko) | 광시야, 공초점 및 다광자 현미경과 함께 사용하기 위한 동적 초점 및 줌 시스템 | |
| CN109884060B (zh) | 一种用于数字切片扫描仪的精密对焦装置 | |
| JP2009217249A (ja) | 可変焦点レンズ | |
| JP6528911B2 (ja) | マニピュレーションシステム | |
| JP2015072303A (ja) | 顕微鏡 | |
| WO2021160723A1 (en) | Microscope apparatus | |
| CN209727783U (zh) | 用于数字切片扫描仪的精密对焦装置 | |
| JP4346888B2 (ja) | 顕微鏡装置 | |
| JP4046161B2 (ja) | 標本画像データ処理方法及び標本検査システム | |
| JP6029395B2 (ja) | 顕微鏡 | |
| KR102715080B1 (ko) | 현미경용 얼라인 장치 | |
| JP2022057695A (ja) | マニピュレーションシステムおよび三次元位置提示方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 10761611 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 10761611 Country of ref document: EP Kind code of ref document: A1 |