WO2009113452A1 - 電動機駆動装置およびその制御方法 - Google Patents
電動機駆動装置およびその制御方法 Download PDFInfo
- Publication number
- WO2009113452A1 WO2009113452A1 PCT/JP2009/054268 JP2009054268W WO2009113452A1 WO 2009113452 A1 WO2009113452 A1 WO 2009113452A1 JP 2009054268 W JP2009054268 W JP 2009054268W WO 2009113452 A1 WO2009113452 A1 WO 2009113452A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- voltage
- inverter
- switching operation
- predetermined
- motor drive
- Prior art date
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/0023—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/02—Providing protection against overload without automatic interruption of supply
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/02—Providing protection against overload without automatic interruption of supply
- H02P29/024—Detecting a fault condition, e.g. short circuit, locked rotor, open circuit or loss of load
- H02P29/0241—Detecting a fault condition, e.g. short circuit, locked rotor, open circuit or loss of load the fault being an overvoltage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2210/00—Converter types
- B60L2210/20—AC to AC converters
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Inverter Devices (AREA)
- Control Of Ac Motors In General (AREA)
Abstract
Description
図1は、この発明の実施の形態1による電動機駆動装置100の構成を説明する概略ブロック図である。
Gate Bipolar Transistor)が適用される。
図2を参照して、制御装置30は、モータ制御用相電圧演算部40と、インバータ用PWM信号変換部42と、インバータ入力電圧指令演算部50と、コンバータ用デューティー比演算部52と、コンバータ用PWM信号変換部54とを含む。
図9は、この発明の実施の形態1の変更例による電動機駆動装置におけるインバータ14のスイッチング制御処理を説明するためのフローチャートである。図9に示したフローチャートに従う制御処理は、制御装置30が予め格納されたプログラムを所定周期毎に実行することにより実現される。
図10は、この発明の実施の形態2に従う電動機駆動装置100Aの構成を説明する概略ブロック図である。
図11を参照して、制御装置30Aは、図2に示す制御装置30と比較して、コンバータ用PWM信号変換部54に代えて、コンバータ用PWM信号変換部54Aを備える点で異なる。制御装置30Aのその他の部分の構成は図2に示した制御装置30と同様であるので詳細な説明は繰り返さない。
図14は、この発明の実施の形態3に従う電動機駆動装置100Bの構成を説明する概略ブロック図である。
Claims (16)
- 電力用半導体素子のスイッチング動作によって交流電圧を発生する電力変換装置と、
前記電力変換装置からの交流電圧が印加されるコイル巻線(20U,20V,20W)を有する電動機(M1)と、
前記電力変換装置のスイッチング動作を制御する制御装置(30)とを備え、
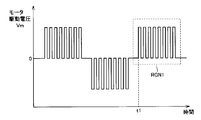
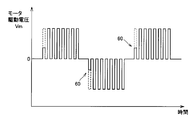
前記制御装置(30,30A,30B)は、前記交流電圧が所定値を超えるときには、前記交流電圧の極性反転時における電圧変化率が相対的に小さくなるように、前記電力変換装置のスイッチング動作を制御する、電動機駆動装置。 - 前記電力変換装置は、前記電力用半導体素子のスイッチング動作によって、前記交流電圧として、所定の電圧振幅および所定のパルス幅を有する両極性パルス電圧を発生するインバータ(14)を含み、
前記制御装置(30)は、前記所定の電圧振幅が前記所定値を超えるときには、前記両極性パルス電圧の極性反転時における立ち上がり時間が相対的に長くなるように、前記インバータ(14)のスイッチング動作を制御する、請求の範囲第1項に記載の電動機駆動装置。 - 前記インバータ(14)は、各前記電力用半導体素子の制御電極に駆動制御信号を伝達する経路を含み、
前記制御装置(30)は、前記所定の電圧振幅が前記所定値を超えるときには、前記両極性パルスの極性反転時において、前記経路の遅延インピーダンスを相対的に高く設定する、請求の範囲第2項に記載の電動機駆動装置。 - 前記電力変換装置は、前記電力用半導体素子のスイッチング動作によって、前記交流電圧として、所定の電圧振幅および所定のパルス幅を有する両極性パルス電圧を発生するインバータ(14)を含み、
前記制御装置(30)は、前記所定の電圧振幅が前記所定値を超えるときには、前記両極性パルスの立ち上がり時間が相対的に長くなるように、前記インバータ(14)のスイッチング動作を制御する、請求の範囲第1項に記載の電動機駆動装置。 - 前記インバータ(14)は、各前記電力用半導体素子の制御電極に駆動制御信号を伝達する経路を含み、
前記制御装置(30)は、前記所定の電圧振幅が前記所定値を超えるときには、前記経路の遅延インピーダンスを相対的に高く設定する、請求の範囲第4項に記載の電動機駆動装置。 - 前記電力変換装置は、
前記電力用半導体素子のスイッチング動作によって、前記交流電圧として、所定の電圧振幅および所定のパルス幅を有する両極性パルス電圧を発生するインバータ(14)と、
前記電力用半導体素子のスイッチング動作によって、前記インバータ(14)への入力電圧を可変制御可能に構成された直流電源とを含み、
前記制御装置(30A)は、前記交流電圧が前記所定値を超えるときには、前記交流電圧の極性反転時における前記入力電圧が相対的に低くなるように、前記直流電源のスイッチング動作を制御する、請求の範囲第1項に記載の電動機駆動装置。 - 前記直流電源は、
前記電力用半導体素子のスイッチング動作によって蓄電機構(B)からの直流電圧を電圧変換するコンバータ(12)と、
前記蓄電機構(B)と前記インバータ(14)との間に前記コンバータをバイパスするように電流経路を形成するためのバイパス用スイッチング素子(Qb)とを含み、
前記制御装置(30A)は、前記交流電圧が前記所定値を超えるときには、前記交流電圧の極性反転時において、前記バイパス用スイッチング素子(Qb)をオンする、請求の範囲第6項に記載の電動機駆動装置。 - 前記電力変換装置は、
前記電力用半導体素子のスイッチング動作によって、前記交流電圧として、所定の電圧振幅および所定のパルス幅を有する両極性パルス電圧を発生するインバータ(14)と、
前記コイル巻線に対して前記インバータ(14)と並列に接続され、前記電力用半導体素子のスイッチング動作によって、前記コイル巻線にパルスを印加可能に構成されたパルス発生装置(31)をさらに備え、
前記制御装置(30B)は、前記交流電圧が前記所定値を超えるときには、前記交流電圧の極性反転時において、前記交流電圧が零電位であるときに、前記交流電圧よりも相対的に小さい電圧振幅を有するパルスを前記コイル巻線に印加するように、前記パルス発生装置(31)を制御する、請求の範囲第1項に記載の電動機駆動装置。 - 電力用半導体素子のスイッチング動作によって交流電圧を発生する電力変換装置と、前記電力変換装置からの交流電圧が印加されるコイル巻線を有する電動機(M1)とを備えた電動機駆動装置の制御方法であって、
前記交流電圧を取得するステップと、
前記交流電圧が所定値を超えるときには、前記交流電圧の極性反転時における電圧変化率が相対的に小さくなるように、前記電力変換装置のスイッチング動作を制御するステップとを備える、電動機駆動装置の制御方法。 - 前記電力変換装置は、前記電力用半導体素子のスイッチング動作によって、前記交流電圧として、所定の電圧振幅および所定のパルス幅を有する両極性パルス電圧を発生するインバータ(14)を含み、
前記電力変換装置のスイッチング動作を制御するステップは、前記所定の電圧振幅が前記所定値を超えるときには、前記両極性パルス電圧の極性反転時における立ち上がり時間が相対的に長くなるように、前記インバータ(14)のスイッチング動作を制御する、請求の範囲第9項に記載の電動機駆動装置の制御方法。 - 前記インバータ(14)は、各前記電力用半導体素子の制御電極に駆動制御信号を伝達する経路を含み、
前記インバータ(14)のスイッチング動作を制御するステップは、前記所定の電圧振幅が前記所定値を超えるときには、前記両極性パルスの極性反転時において、前記経路の遅延インピーダンスを相対的に高く設定する、請求の範囲第10項に記載の電動機駆動装置の制御方法。 - 前記電力変換装置は、前記電力用半導体素子のスイッチング動作によって、前記交流電圧として、所定の電圧振幅および所定のパルス幅を有する両極性パルス電圧を発生するインバータ(14)を含み、
前記電力変換装置のスイッチング動作を制御するステップは、前記所定の電圧振幅が前記所定値を超えるときには、前記両極性パルス電圧の立ち上がり時間が相対的に長くなるように、前記インバータ(14)のスイッチング動作を制御する、請求の範囲第9項に記載の電動機駆動装置の制御方法。 - 前記インバータ(14)は、各前記電力用半導体素子の制御電極に駆動制御信号を伝達する経路を含み、
前記インバータ(14)のスイッチング動作を制御するステップは、前記所定の電圧振幅が前記所定値を超えるときには、前記経路の遅延インピーダンスを相対的に高く設定する、請求の範囲第12項に記載の電動機駆動装置の制御方法。 - 前記電力変換装置は、
前記電力用半導体素子のスイッチング動作によって、前記交流電圧として、所定の電圧振幅および所定のパルス幅を有する両極性パルス電圧を発生するインバータ(14)と、
前記電力用半導体素子のスイッチング動作によって、前記インバータ(14)への入力電圧を可変制御可能に構成された直流電源とを含み、
前記電力変換装置のスイッチング動作を制御するステップは、前記交流電圧が前記所定値を超えるときには、前記交流電圧の極性反転時における前記入力電圧が相対的に低くなるように、前記直流電源のスイッチング動作を制御する、請求の範囲第9項に記載の電動機駆動装置の制御方法。 - 前記直流電源は、
前記電力用半導体素子のスイッチング動作によって蓄電機構(B)からの直流電圧を電圧変換するコンバータ(12)と、
前記蓄電機構(B)と前記インバータ(14)との間に前記コンバータ(12)をバイパスするように電流経路を形成するためのバイパス用スイッチング素子(Qb)とを含み、
前記直流電源のスイッチング動作を制御するステップは、前記交流電圧が前記所定値を超えるときには、前記交流電圧の極性反転時において、前記バイパス用スイッチング素子(Qb)をオンする、請求の範囲第14項に記載の電動機駆動装置の制御方法。 - 前記電力変換装置は、
前記電力用半導体素子のスイッチング動作によって、前記交流電圧として、所定の電圧振幅および所定のパルス幅を有する両極性パルス電圧を発生するインバータ(14)と、
前記コイル巻線に対して前記インバータ(14)と並列に接続され、前記電力用半導体素子のスイッチング動作によって、前記コイル巻線にパルスを印加可能に構成されたパルス発生装置(31)をさらに備え、
前記電力変換装置のスイッチング動作を制御するステップは、前記交流電圧が前記所定値を超えるときには、前記交流電圧の極性反転時において、前記交流電圧が零電位であるときに、前記交流電圧よりも相対的に小さい電圧振幅を有するパルスを前記コイル巻線に印加するように、前記パルス発生装置(31)を制御する、請求の範囲第9項に記載の電動機駆動装置の制御方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE112009000549T DE112009000549T5 (de) | 2008-03-10 | 2009-03-06 | Elektromotor-Ansteuerungsvorrichtung und Verfahren zu deren Steuerung |
| US12/864,471 US8350516B2 (en) | 2008-03-10 | 2009-03-06 | Electric motor drive device and method of controlling the same |
| CN2009801053624A CN101953064B (zh) | 2008-03-10 | 2009-03-06 | 电动机驱动装置及其控制方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008060071A JP4450082B2 (ja) | 2008-03-10 | 2008-03-10 | 電動機駆動装置およびその制御方法 |
| JP2008-060071 | 2008-03-10 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2009113452A1 true WO2009113452A1 (ja) | 2009-09-17 |
Family
ID=41065121
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2009/054268 WO2009113452A1 (ja) | 2008-03-10 | 2009-03-06 | 電動機駆動装置およびその制御方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8350516B2 (ja) |
| JP (1) | JP4450082B2 (ja) |
| KR (1) | KR20100108460A (ja) |
| CN (1) | CN101953064B (ja) |
| DE (1) | DE112009000549T5 (ja) |
| WO (1) | WO2009113452A1 (ja) |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20110045426A (ko) * | 2009-10-27 | 2011-05-04 | 현대자동차주식회사 | Dc/dc 컨버터 고장시 차량 운전 유지를 위한 비상 동작 장치 및 방법 |
| US8847528B2 (en) * | 2010-07-23 | 2014-09-30 | Mitsubishi Electric Corporation | Control apparatus and control method for AC rotary machine |
| BR112013001384A2 (pt) * | 2010-07-27 | 2016-05-24 | Mitsubishi Electric Corp | aparelho de controle para uma máquina giratória de ca |
| US9178449B2 (en) | 2011-01-11 | 2015-11-03 | Toyota Jidosha Kabushiki Kaisha | Motor drive system control apparatus |
| JP5552443B2 (ja) * | 2011-01-12 | 2014-07-16 | トヨタ自動車株式会社 | 駆動装置 |
| JP5344056B2 (ja) * | 2011-03-28 | 2013-11-20 | 株式会社デンソー | スイッチング素子の駆動回路 |
| FR2995083B1 (fr) * | 2012-08-30 | 2016-01-29 | Renault Sas | Dispositif de detection et de mesure d'un defaut d'isolement |
| JP6107239B2 (ja) * | 2013-03-06 | 2017-04-05 | アイシン精機株式会社 | 同期整流器制御装置 |
| JP6052028B2 (ja) * | 2013-04-03 | 2016-12-27 | 株式会社デンソー | モータ制御装置 |
| US9950627B2 (en) * | 2013-11-07 | 2018-04-24 | Hitachi Automotive Systems, Ltd. | Power conversion device |
| CN107223307B (zh) * | 2015-02-05 | 2020-12-08 | 奥的斯电梯公司 | 具有可忽略的共模电压的六相电动机器的驱动和控制 |
| TWI549418B (zh) | 2015-03-31 | 2016-09-11 | 寧茂企業股份有限公司 | 交流馬達驅動系統及驅動方法 |
| KR101875996B1 (ko) * | 2015-06-17 | 2018-07-06 | 현대자동차주식회사 | 친환경 차량용 양방향 컨버터 제어 장치 및 방법 |
| JP6439725B2 (ja) * | 2016-03-17 | 2018-12-19 | 株式会社デンソー | 磁気回路部品の温度調整装置 |
| US9931944B2 (en) * | 2016-03-22 | 2018-04-03 | Ford Global Technologies, Llc | Variable voltage convert system with reduced bypass diode conduction |
| US10110103B1 (en) * | 2017-06-21 | 2018-10-23 | GM Global Technology Operations LLC | Electric drive system enhancement using a DC-DC converter |
| EP3470858B1 (en) | 2017-10-16 | 2022-10-05 | Hamilton Sundstrand Corporation | Motor drive assembly |
| CN109164384B (zh) * | 2018-06-28 | 2021-04-09 | 联合汽车电子有限公司 | 电机定子绝缘老化试验装置及试验方法 |
| TWI668954B (zh) * | 2018-08-20 | 2019-08-11 | 聯華聚能科技股份有限公司 | Motor controller |
| CN114097172A (zh) | 2019-06-10 | 2022-02-25 | 米沃奇电动工具公司 | 使用可选择性连接的电阻的马达制动 |
| US11196379B2 (en) * | 2020-03-09 | 2021-12-07 | Infineon Technologies Austria Ag | System for detection and algorithmic avoidance of isolation failures in electric motors |
| CN112838794B (zh) * | 2021-01-29 | 2023-02-03 | 中颖电子股份有限公司 | 一种无位置传感器的直流无刷电动机的驱动方法 |
| WO2023202848A1 (en) * | 2022-04-21 | 2023-10-26 | Ams-Osram International Gmbh | Spinning electromotive assembly and method of operating a spinning electromotive assembly |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
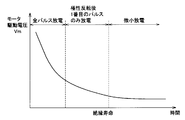
| JP2007240160A (ja) * | 2006-03-06 | 2007-09-20 | Mitsubishi Electric Corp | 部分放電計測装置 |
| JP2007295749A (ja) * | 2006-04-26 | 2007-11-08 | Toyota Motor Corp | 電源装置およびこれを備える車両 |
| JP2008022624A (ja) * | 2006-07-12 | 2008-01-31 | Toyota Motor Corp | 電動機駆動システムの制御装置および制御方法 |
| JP2008301685A (ja) * | 2007-06-04 | 2008-12-11 | Nippon Soken Inc | 電力変換回路の駆動装置及び電力変換システム |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10127064A (ja) | 1996-10-16 | 1998-05-15 | Hitachi Ltd | 電力変換装置 |
| US6035265A (en) * | 1997-10-08 | 2000-03-07 | Reliance Electric Industrial Company | System to provide low cost excitation to stator winding to generate impedance spectrum for use in stator diagnostics |
| US6196208B1 (en) * | 1998-10-30 | 2001-03-06 | Autotronic Controls Corporation | Digital ignition |
| KR100433799B1 (ko) * | 1998-12-03 | 2004-06-04 | 가부시키가이샤 히타치세이사쿠쇼 | 전압구동형 스위칭 소자의 게이트 구동회로 |
| JP3768024B2 (ja) * | 1999-03-09 | 2006-04-19 | 株式会社日立産機システム | 電力変換装置 |
| ATE321206T1 (de) * | 1999-09-15 | 2006-04-15 | Knite Inc | Zündkerze mit vorwärtstreibendem funken und langer lebensdauer und zugehörige zündschaltung |
| JP4557616B2 (ja) * | 2004-07-02 | 2010-10-06 | 株式会社日立産機システム | 電力変換装置 |
| JP4044861B2 (ja) * | 2003-04-03 | 2008-02-06 | 三菱電機株式会社 | 電力変換装置およびその電力変換装置を備える電力変換システム装置 |
| JP4053501B2 (ja) * | 2004-01-13 | 2008-02-27 | ファナック株式会社 | モータ駆動装置 |
| EP1921457A4 (en) * | 2005-08-29 | 2008-12-17 | Toyota Motor Co Ltd | INSULATION RESISTANCE DETECTOR DETECTOR AND ERROR SELF-DIAGNOSTIC PROCEDURE FOR INSULATION RESISTANCE DETECTOR DETECTOR |
| JP4462243B2 (ja) * | 2006-07-10 | 2010-05-12 | トヨタ自動車株式会社 | 負荷駆動装置およびそれを備える車両 |
| JP4762929B2 (ja) * | 2007-02-14 | 2011-08-31 | トヨタ自動車株式会社 | 半導体電力変換装置 |
| US7639021B2 (en) * | 2007-05-11 | 2009-12-29 | Temic Automotive Of North America, Inc. | Circuit and method for detecting a dielectric breakdown fault |
| JP4380771B2 (ja) * | 2008-01-31 | 2009-12-09 | トヨタ自動車株式会社 | 駆動システムおよびその制御方法並びに車両 |
-
2008
- 2008-03-10 JP JP2008060071A patent/JP4450082B2/ja active Active
-
2009
- 2009-03-06 US US12/864,471 patent/US8350516B2/en active Active
- 2009-03-06 DE DE112009000549T patent/DE112009000549T5/de not_active Ceased
- 2009-03-06 WO PCT/JP2009/054268 patent/WO2009113452A1/ja active Application Filing
- 2009-03-06 KR KR1020107020113A patent/KR20100108460A/ko not_active Application Discontinuation
- 2009-03-06 CN CN2009801053624A patent/CN101953064B/zh active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007240160A (ja) * | 2006-03-06 | 2007-09-20 | Mitsubishi Electric Corp | 部分放電計測装置 |
| JP2007295749A (ja) * | 2006-04-26 | 2007-11-08 | Toyota Motor Corp | 電源装置およびこれを備える車両 |
| JP2008022624A (ja) * | 2006-07-12 | 2008-01-31 | Toyota Motor Corp | 電動機駆動システムの制御装置および制御方法 |
| JP2008301685A (ja) * | 2007-06-04 | 2008-12-11 | Nippon Soken Inc | 電力変換回路の駆動装置及び電力変換システム |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112009000549T5 (de) | 2011-01-27 |
| CN101953064A (zh) | 2011-01-19 |
| CN101953064B (zh) | 2013-04-24 |
| US8350516B2 (en) | 2013-01-08 |
| KR20100108460A (ko) | 2010-10-06 |
| JP4450082B2 (ja) | 2010-04-14 |
| JP2009219241A (ja) | 2009-09-24 |
| US20100295494A1 (en) | 2010-11-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4450082B2 (ja) | 電動機駆動装置およびその制御方法 | |
| US10027262B2 (en) | Pseudorandom PWM variation based on motor operating point | |
| US8264181B2 (en) | Controller for motor drive control system | |
| JP6394030B2 (ja) | インバータ制御装置 | |
| JP4280573B2 (ja) | 負荷駆動装置 | |
| US8027181B2 (en) | Load drive device and vehicle equipped with the same | |
| JP5397532B2 (ja) | 電源装置 | |
| US9553540B2 (en) | Power converter with pre-compensation for dead-time insertion | |
| EP2733844B1 (en) | Vehicle and method for controlling vehicle | |
| JP6089978B2 (ja) | スイッチトリラクタンスモータのpam駆動装置 | |
| US9595890B2 (en) | Switching control apparatus of load drive system | |
| JP6253850B2 (ja) | 交流回転電機の制御装置 | |
| JP6201867B2 (ja) | インバータ制御装置 | |
| JP6669532B2 (ja) | 電力変換装置 | |
| KR20180020941A (ko) | 전력-변환 방법 및 디바이스 및 이러한 디바이스를 포함하는 차량 | |
| JP5916847B2 (ja) | 多相機械を駆動制御する方法 | |
| JP6392464B2 (ja) | 車両用駆動装置、車両用駆動システム、および、車両用駆動装置の制御方法 | |
| JP3931734B2 (ja) | 電気負荷駆動装置 | |
| US11784584B2 (en) | Variable mutual off time control for automotive power converter | |
| US11632070B2 (en) | Drive system | |
| JP2018157650A (ja) | インバータ制御装置及びインバータ制御方法 | |
| JP6396761B2 (ja) | 電力変換装置 | |
| JP6129106B2 (ja) | 外部給電システム | |
| JP2015177679A (ja) | 電力変換装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 200980105362.4 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 09720142 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 12864471 Country of ref document: US |
|
| ENP | Entry into the national phase |
Ref document number: 20107020113 Country of ref document: KR Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 1120090005497 Country of ref document: DE |
|
| RET | De translation (de og part 6b) |
Ref document number: 112009000549 Country of ref document: DE Date of ref document: 20110127 Kind code of ref document: P |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 09720142 Country of ref document: EP Kind code of ref document: A1 |