WO2006080220A1 - 撮像装置および撮像素子 - Google Patents
撮像装置および撮像素子 Download PDFInfo
- Publication number
- WO2006080220A1 WO2006080220A1 PCT/JP2006/300674 JP2006300674W WO2006080220A1 WO 2006080220 A1 WO2006080220 A1 WO 2006080220A1 JP 2006300674 W JP2006300674 W JP 2006300674W WO 2006080220 A1 WO2006080220 A1 WO 2006080220A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- color
- signal
- filters
- noise
- image
- Prior art date
Links
- 238000003384 imaging method Methods 0.000 title claims abstract description 28
- 239000003086 colorant Substances 0.000 claims abstract description 32
- 230000000295 complement effect Effects 0.000 claims abstract description 27
- 238000000034 method Methods 0.000 claims abstract description 21
- 238000012545 processing Methods 0.000 claims description 92
- 239000011159 matrix material Substances 0.000 claims description 62
- 230000035945 sensitivity Effects 0.000 claims description 59
- 238000000926 separation method Methods 0.000 claims description 19
- 238000004364 calculation method Methods 0.000 claims description 14
- 230000008569 process Effects 0.000 claims description 12
- 229920006395 saturated elastomer Polymers 0.000 claims description 8
- 230000008901 benefit Effects 0.000 abstract description 2
- 230000003595 spectral effect Effects 0.000 description 45
- 230000006870 function Effects 0.000 description 22
- 238000010586 diagram Methods 0.000 description 18
- 238000012937 correction Methods 0.000 description 14
- 238000006243 chemical reaction Methods 0.000 description 13
- 238000011156 evaluation Methods 0.000 description 12
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 7
- 230000009466 transformation Effects 0.000 description 5
- 230000009467 reduction Effects 0.000 description 4
- 101000860173 Myxococcus xanthus C-factor Proteins 0.000 description 3
- 230000002596 correlated effect Effects 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 230000004584 weight gain Effects 0.000 description 2
- 235000019786 weight gain Nutrition 0.000 description 2
- 201000005569 Gout Diseases 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000000875 corresponding effect Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000000644 propagated effect Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000003786 synthesis reaction Methods 0.000 description 1
- 230000002194 synthesizing effect Effects 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
- 230000001131 transforming effect Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/80—Camera processing pipelines; Components thereof
- H04N23/84—Camera processing pipelines; Components thereof for processing colour signals
- H04N23/85—Camera processing pipelines; Components thereof for processing colour signals for matrixing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/10—Circuitry of solid-state image sensors [SSIS]; Control thereof for transforming different wavelengths into image signals
- H04N25/11—Arrangement of colour filter arrays [CFA]; Filter mosaics
- H04N25/13—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements
- H04N25/135—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements based on four or more different wavelength filter elements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/80—Camera processing pipelines; Components thereof
- H04N23/84—Camera processing pipelines; Components thereof for processing colour signals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/10—Cameras or camera modules comprising electronic image sensors; Control thereof for generating image signals from different wavelengths
- H04N23/12—Cameras or camera modules comprising electronic image sensors; Control thereof for generating image signals from different wavelengths with one sensor only
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/10—Circuitry of solid-state image sensors [SSIS]; Control thereof for transforming different wavelengths into image signals
- H04N25/11—Arrangement of colour filter arrays [CFA]; Filter mosaics
- H04N25/13—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements
- H04N25/133—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements including elements passing panchromatic light, e.g. filters passing white light
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/10—Circuitry of solid-state image sensors [SSIS]; Control thereof for transforming different wavelengths into image signals
- H04N25/11—Arrangement of colour filter arrays [CFA]; Filter mosaics
- H04N25/13—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements
- H04N25/135—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements based on four or more different wavelength filter elements
- H04N25/136—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements based on four or more different wavelength filter elements using complementary colours
Definitions
- the present invention relates to an imaging device and an imaging element.
- This invention provides a means and apparatus for expanding the luminance dynamic range that can be scanned while maintaining image quality, particularly color reproducibility and noise characteristics at an acceptable level.
- Patent Document 1 Japanese Patent Laid-Open No. 2003-284804.
- a four-color color fill 1 with the color arrangement shown in Fig. 1 is provided in front of the image sensor.
- the color filter 1 includes an R fill that transmits only red (R) light, a B fill that transmits only blue (B) light, and a first wavelength band.
- the G1 filter that transmits only green light and the G2 filter that transmits only green light in the second wavelength band have a total of four units.
- Figure 2 A and Figure 2 B have such a color fill 1
- An example of the configuration of a signal processing unit that performs signal processing on an image signal obtained by an image sensor, for example, a CCD is shown.
- Fig. 2A and Fig. 2B show the configuration of the signal processing unit due to restrictions on drawing space.
- Reference numeral 10 denotes a front end to which four types of color signals (R signal, G 1 signal, G 2 signal, B signal) from the image sensor are input.
- the front end 10 performs processing such as correlated double sampling processing for removing noise components, gain control processing, and digital conversion processing on the color signal from the image sensor.
- Image data from the front end 10 is supplied to a signal processing unit 11 configured as an LSI (Large Scale Integrated Circuit U).
- LSI Large Scale Integrated Circuit U
- the signal processing unit 11 is connected to a microcomputer (not shown) via a micro computer evening face 12.
- the microphone computer controls the overall operation of the digital still camera, for example, according to a predetermined program. Further, each block constituting the signal processing unit 1 1 is controlled by the microphone port combiner via the microcomputer interface 1 2.
- the signal processing unit 11 performs interpolation processing, filtering processing, matrix operation processing, luminance signal generation processing, color difference signal generation processing, and the like on the four types of color signals input from the front end 10.
- the image signal generated by the signal processing unit 11 is supplied to a display (not shown), and a captured image is displayed. Further, the image data from the signal processing unit 11 is compressed and stored in an internal storage medium, an external storage medium, or the like.
- the offset correction processing unit 21 removes a noise component (offset component) included in the image signal supplied from the front end 10.
- Image signal from the offset correction processing unit 2 1 is output to the white balance correction processing unit 2 2
- the white balance is corrected. That is, the imbalance between colors due to the difference in the color temperature environment of the subject and the difference in sensitivity due to the color filters (R, G 1, G 2, B) on the sensor is corrected.
- the output of the white balance correction processing unit 2 2 is supplied to the vertical direction synchronization processing unit 2 3.
- the vertical synchronization processing unit 23 uses a delay element such as a small memory to synchronize different vertical image data for vertical interpolation processing and fill-up processing. .
- a plurality of image signals synchronized by the vertical direction synchronization processing unit 23 are supplied to the interpolation processing, filter processing, high frequency correction processing, and noise processing unit 24.
- Interpolation processing that interpolates the color signal of 2x2 pixels, which is the smallest unit of the color filter (R, G 1, G 2, B), into the phase of the same space, filter processing that appropriately limits the signal band, and signal band
- a high frequency correction process that corrects the high frequency component of the signal and a noise process that removes the noise component of the signal are performed.
- Image signals obtained by the processing unit 24, for example, RG 1 G 2 B four-color signals are supplied to the linear matrix processing unit 25.
- linear matrix processing unit 25 matrix calculation of 4 inputs and 3 outputs is performed.
- RGB color output can be obtained from the input RG 1 G 2 B image information of 4 colors.
- the RGB output from the linear matrix processing unit 25 is supplied to the gamma correction processing units 26 R, 26 G, and 26 B, respectively.
- the gamma correction processing units 26 6 R, 26 G, and 26 B perform reverse correction of the nonlinear characteristics of the display device in advance, so that linear characteristics are finally realized.
- the output signals of the gamma correction processing units 26 R, 26 G, and 26 B are supplied to the luminance (Y) signal generation processing unit 27 and the color difference (C) signal generation processing unit 28, respectively.
- the luminance signal generation processing unit 27 is a gamma-corrected RGB signal.
- the luminance signal is generated by combining the signals with a predetermined combining ratio.
- the color difference signal generation processing unit 28 generates a color difference signal by synthesizing the gamma-corrected RGB signal at a predetermined synthesis ratio.
- the color difference signal generated by the color difference signal generation processing unit 28 is supplied to the band limiting and thinning processing unit 29, and a color difference signal in which the color difference signals Cb and Cr are time-division multiplexed is formed. In this way, an image processing apparatus that uses a four-color color filter can achieve better color reproducibility than a three-primary color filter.
- the characteristics preferable for the spectral sensitivity of an image sensor are good color reproducibility and good noise characteristics.
- “Good color reproducibility” means that the same color as human eyes can be detected, or that the color difference with respect to the appearance of human eyes is small.
- the appearance of the human eye means the color that is visible to the human eye.
- “Good noise characteristics” means that the amount of noise at a certain luminance level is small. Noise is broadly divided into luminance noise and color noise. Luminance noise depends on absolute sensitivity, and color noise is the relationship between the spectral sensitivities of the imager's power, that is, the shape of the spectral sensitivity curve. Depends heavily on
- the method of creating the RGB signal value of the primary color by matrix conversion of the output signal of the image sensor that is linear in luminance is the signal processing of a general image input device as shown in Fig. 2A and Fig. 2B. Well done. This processing is called linear matrix processing.
- image input devices scanners, digital still cameras, etc.
- PC personal computer monitors
- the target color space for the RGB signal values of the primary color is set to the s RGB color space, which is a general PC monitor space.
- the RGB color space is defined by the International Electrotechnical Commission (IEC) as a standard color space for multimedia that the transmitted color image signal should comply with. By conforming to the standard color space, the same color reproduction can be shared between the sending side and receiving side of a color image.
- IEC International Electrotechnical Commission
- the target spectral sensitivity of the image sensor (represented in the figure as relative sensitivity) is the s RGB obtained by linearly converting the color matching function (see Fig. 3), which is the spectral sensitivity of the human eye, using a 7 0 9 system matrix. It is a color matching function.
- 70 9 Matrix is described in Reference 1 ("ITU-R BT.709-3," Basic Parameter Values for the HDTV Standard for the Studio and for International Program Exchange "(1998)").
- the curve 3 lx represents the function X ( ⁇ )
- the curve 3 1 y represents the function y ( ⁇ )
- the curve 3 1 ⁇ represents the function ⁇ ( ⁇ ).
- Figure 4 is a graphical representation of the s RGB color matching function.
- the curve 32 r represents the function r ( ⁇ )
- the curve 3 2 g represents the function g ( ⁇ )
- the curve 32 b represents the function b ( ⁇ ).
- the curve 34R represents the function SIR ( ⁇ )
- the curve 34 G represents the function si G ( ⁇ )
- the curve 34 ⁇ ⁇ represents the function si ⁇ ( ⁇ ). Since the spectrum in Fig. 6 does not satisfy the router condition, it cannot be linearly transformed into the s RGB color matching function. Therefore, the approximate transformation matrix operation to the s RGB color matching function is expressed by the following equation (2). ⁇ f 2. 250 -0. 649 1 0. 089,
- a typical primary color RGB image sensor has a spectral sensitivity with a curve as shown in Fig. 6. It is known that the color reproducibility and noise characteristics are quite excellent. Yes. However, in actuality, the sensitivity curve of the image sensor itself, the lens characteristics, and the infrared cut filter characteristics affect the spectral sensitivity curve shown in Fig. 7. In Fig. 7, curve 35 R shows the spectral sensitivity of the R filter, curve 35 G shows the spectral sensitivity of the G filter, and curve 35 B shows the spectral sensitivity of the B filter.
- the primary color RGB imaging device is quite good in terms of color reproducibility, but has some room for improvement.
- the color separation noise is small, but the sensitivity is low.
- luminance noise which is a dominant component of noise, tends to increase. In other words, it has a good color expression, but it is easy to get a sense of noise.
- a complementary color filter As a color filter, a complementary color filter is also known. For example, Y (yellow) C (cyan) M (magenta evening) G (green) As shown in Fig. 8, complementary color checkered line sequential color filter arrangement is known. In Fig. 8, the 2 x 4 array surrounded by a broken line is the smallest unit of the array.
- Fig. 9 shows a graph of the spectral sensitivity of such a complementary color system YCMG image sensor.
- curve 3 6 Y shows the spectral sensitivity of the Y filter
- curve 3 6 C shows the spectral sensitivity of the C filter
- curve 3 6 M shows the spectral sensitivity of the M filter
- curve 3 6 G shows the spectral sensitivity of G fill.
- the sensitivity of each color filter is high, so the complementary YC MG image sensor is particularly strong at photographing in some places and has good luminance noise characteristics.
- the spectral sensitivity overlap is very large, an attempt to improve color reproducibility requires a very large color separation coefficient, resulting in an increase in color separation noise. Therefore, there is a problem that color reproducibility cannot be pursued as compared with the primary color RGB imaging element.
- the complementary color system Y C MG image sensor has much room for tracking in terms of color reproducibility.
- color separation noise is large, but due to high sensitivity, luminance noise, which is the dominant component of noise, tends to be small. In other words, noise is good, but color reproducibility is not so good.
- an object of the present invention is to provide an imaging device and an imaging device that can solve the problems of these imaging devices. Disclosure of the invention
- the present invention provides an image pickup unit including an image input unit including an image pickup unit and a front end, and a signal processing unit that processes a plurality of image pickup signals from the image input unit and generates three primary color signals.
- the imaging unit includes a color separation filter for the three primary colors and a complementary color system, and an image sensor to which the color light separated in the color separation filter is input.
- the signal processing unit performs matrix calculation processing on the multiple signals obtained using the three primary and complementary color separation filters.
- the primary color signal is generated by performing a matrix operation on the primary color signal obtained using the primary color separation filter. This is an imaging apparatus.
- the present invention provides three color fills for the primary colors R (red), G (green), and B (blue), and two colors fills for the complementary colors Y (yellow) and C (cyan).
- This is an image sensor that is made up of a total of five color filters, and by arranging G-fills that are close to the luminance characteristics of the human eye in a checkered pattern, obtains spatial information four times that of other colors. is there.
- color reproducibility and color separation noise can be reduced by combining the color fill of the image sensor with five colors of the primary color system RGB complementary color system YC. Also, by using the output signal of the RGBYC five-color color filter image sensor according to the luminance level, the color reproducibility and high sensitivity are better than using the color and complementary color image sensors alone. A low noise imaging device can be realized. As a result, it is possible to capture scenes with a wide dynamic range.
- FIG. 1 is a schematic diagram showing the color arrangement of the color filter of the previously proposed imaging apparatus.
- FIG. 2A and FIG. 2B are block diagrams showing the configuration of the signal processing unit of the previously proposed imaging apparatus.
- FIG. 3 is a graph showing an example of the color matching function.
- FIG. 4 is a graph showing an example of the s RGB color matching function.
- Fig. 5 is a graph showing the spectral sensitivity of the three-color filter that satisfies the router requirements.
- FIG. 6 is a graph showing the spectral sensitivity of a normal three primary color filter.
- FIG. 7 is a graph showing the spectral sensitivity of the primary color RGB imaging device.
- FIG. 8 is a schematic diagram showing the color arrangement of the complementary color YCMG image sensor.
- FIG. 9 is a graph showing the spectral sensitivity of the complementary color YCMG image pickup device.
- FIGS. 10A and 10B are graphs showing the spectral sensitivity of the hybrid RGB YC image pickup device.
- FIG. 11 is a schematic diagram showing the color arrangement of a hybrid RGB YC image sensor.
- FIG. 12 is a schematic diagram for explaining signal processing using an output signal of a hybrid RGB YC image sensor.
- FIG. 13 shows a signal processing flow to which the present invention can be applied.
- FIG. 14 is a flowchart showing the flow of color conversion processing in the present invention.
- FIG. 15 is a graph showing a CN diagram in the present invention.
- FIG. 16 is a graph showing a comparison of CN values for a hybrid RGB YC image sensor, a primary color image sensor, and a complementary color image sensor.
- FIG. 17 is a block diagram showing an example of signal processing in one embodiment of the present invention.
- FIG. 18 is a schematic diagram showing an example of weight gain coefficient transition during signal processing. BEST MODE FOR CARRYING OUT THE INVENTION
- an imaging device having a hybrid R GB YC color filter is configured using primary color RGB fill and complementary color YC fill.
- RGB indicates a filter that transmits red, green, and blue light, respectively
- YC indicates a filter that transmits yellow and cyan light, respectively.
- FIG. 10A and FIG. 10B show the minimum unit (4 ⁇ 4) of one example of the color filter array that can be used in the present invention and another example, respectively.
- the characteristics of the color filter arrangements shown in Fig. 10A and Fig. 10B are as follows. First, the G filter near the human eye luminance signal, which is directly related to the resolution, and the other color filter 4 times as large as the checkerboard. That is, the G filter occupies a ratio of 8 out of 16 units of the minimum unit, and the remaining 4 color fills are each 2 parts.
- the rows with low sensitivity (G, R, G, B) and columns with high sensitivity (C, G, Y, G) are alternately arranged in each row. Array. If you read different exposure times for each row, Reading of the dynamic range becomes easy.
- the array shown in Fig. 10B is contained in two G's in each row and column, and the remaining two colors are a combination of one with high sensitivity and one with low sensitivity. In addition, it is an array with little difference in brightness in the horizontal and vertical directions. Therefore, compared with the arrangement shown in FIG. 10A, the readout method is complicated, but since the spatial interpolation characteristic is advantageous, it has a feature that it is easy to realize smooth gradation expression.
- Figure 11 shows a graph of spectral sensitivity of the hybrid R G B Y C color filter.
- curve 3 7 Y shows the spectral sensitivity of the Y filter
- curve 3 7 C shows the spectral sensitivity of the filter of C
- curve 3 7 R shows the spectral sensitivity of the filter of R
- Curve 3 7 G shows the spectral sensitivity of the G filter
- curve 3 7 B shows the spectral sensitivity of the B filter.
- the complementary colors Y and C have higher spectral sensitivity than the primary colors R, G, and ⁇ .
- Figure 12 shows the relationship between the amount of charge Q stored in the image sensor and the amount of light ⁇ for each color of the color filter.
- Q s is the saturation charge
- 3 8 C is the [P-Q] characteristic for the C filter
- 3 8 is the [P-Q] characteristic for the ⁇ ⁇ ⁇ ⁇ filter.
- 8 R shows the [PQ] characteristic for the R filter
- 3 8 G shows the [P_Q] characteristic for the G filter
- 3 8 B shows the [PQ] characteristic for the B filter.
- the cells with high sensitivity Y and C fills immediately accumulate necessary charges even with a small amount of light, while the low sensitivity R and B fills are stored. Even if a large amount of light is incident on the cell where is placed, the rate at which charge is accumulated is slow, so it will not immediately saturate with charge. Taking advantage of this characteristic difference, images with a very wide dynamic range can be captured. Can be removed.
- the cells with C fills are saturated first, so the amount of light that saturates the charge accumulated in the cells with C fills Ph
- a low / medium luminance region and a high luminance region are defined as boundaries.
- the signal values of five colors R, G, B, Y, and C are used.
- the signal values for the three colors R, G, and ⁇ are used. In this way, it is possible to generate an image with a very wide dynamic range by switching the color filter to be used according to the luminance of the image.
- a method for determining the luminance of an image for example, a method of performing determination based on signal values such as G and Y, which are signal values of an image sensor including luminance components of human eyes, is possible.
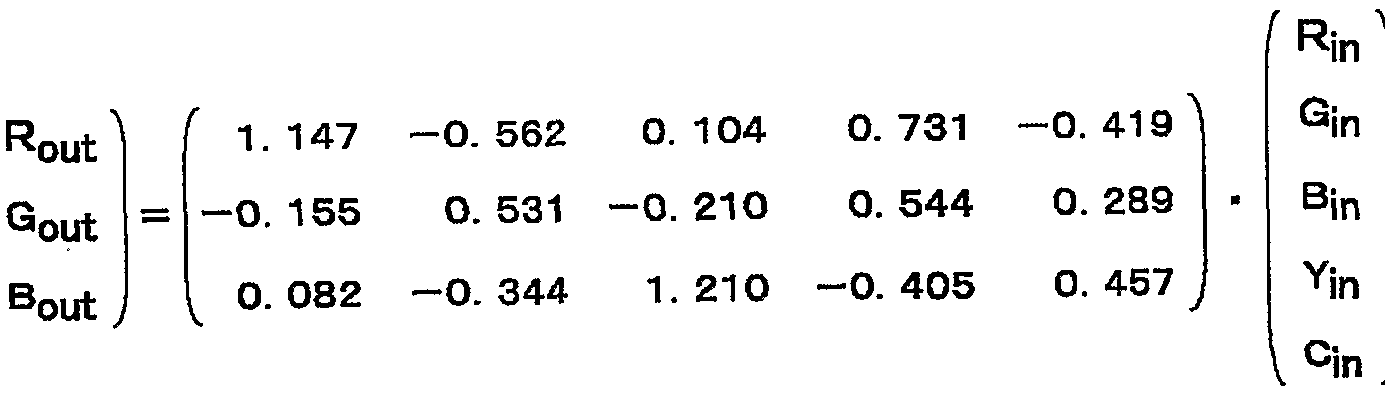
- RGB signal value of the image In order to calculate the RGB signal value of the image from the signal value of the image sensor, some matrix calculation processing is required. For example, 5 colors RGBYC signal values (Rin, Gin, Bin, Yin, Cin) are generated. Matrix calculation processing to convert RGB image signal values (Rout, Gout, Bout) uses 3x5 matrix coefficients. Is expressed by the following equation (3).
- the matrix coefficient in Eq. (3) is called a linear matrix in the sense of a matrix operation coefficient for linear signals.
- a linear matrix in the sense of a matrix operation coefficient for linear signals.
- Reference 3 For the method of determining the linear matrix, refer to Reference 3 ("Takami Mizura, Naoya Kato, Nishi See Kenichi Oo, “Evaluation method of spectral sensitivity of CCD color filter considering noise”, Color Forum Japan 2003 Proceedings, pp.29-32 (2003)).
- the signal values of all five colors of the hybrid image sensor are used. It is possible. Compared to the three primary colors, the number of colors is five, and the five colors have good color separation, so image processing that is superior in both color reproducibility and noise reduction is possible.
- an image pickup apparatus using the above-described hybrid RGB YC image pickup device for example, a digital still camera will be described below.
- the present invention is not limited to a still camera, and can also be applied to a camera for moving image shooting.
- the standard light source D 55 specified by CIE is used as the light source and the target is Macbeth Color Checker.
- the processing shown in Fig. 13 is assumed.
- Raw obtained by integrating the product of the spectral sensitivity of the color filter of the image sensor as the overall characteristics of the digital still camera, the spectral reflectance of the color patch of the Macbeth Color Checker, and the spectral radiance of the imaging light source Data4 1 is multiplied by a gain so that the level of each color data is equal to the achromatic color in white balance correction processing 42.
- color conversion processing 43 is performed so that a linear signal value approximates the target color with respect to the luminance signal by matrix processing.
- This process 43 corresponds to the linear matrix process.
- this matrix is called MAT as appropriate.
- the signal value becomes three colors of R (red), G (green), and B (blue).
- the white balance correction process 42 is an N ⁇ N diagonal matrix calculation process
- the color conversion process 43 is a 3 ⁇ N matrix calculation process.
- the camera GB 45 is obtained as the final output through the gamma correction process 44.
- the inverse gamma of s RGB is used as the camera gamma.
- the camera RGB obtained in this way is assumed to be reproduced and observed on a standard s RGB monitor. That is, camera RGB is assumed to be a color in the s RGB color space. In the calculation, values outside the s RGB range are retained, so that colors outside the s RGB color gamut are not clipped. Shall be considered.
- I a * b * value is a color space defined from tristimulus values in standard light.
- C IE proposed i v as a uniform color space in 1964, 1
- the camera RGB 51 receives the s RGB gamma processing 52 and then converts the RGB to tristimulus values XYZ in the conversion processing 53. Then, in the conversion process 54, XYZ is converted into L * a * b * using the 709 matrix M7Q955 . And the final camera! a * b * 5 6 is obtained.
- the Zaf value can be calculated from the spectral reflectance of Macbeth Color Checker and the spectral radiance of standard light source D 5 5.
- CD represents the optical shot noise, that is, the noise component that depends on the signal value
- b d represents the floor noise, that is, the noise component that does not depend on the signal value (see Reference 4).
- This noise Noise ⁇ is propagated to various color spaces by camera signal processing and L * a * b * conversion.
- the following is the noise propagation model (see Reference 6. (PD Burns and RS Berns, Error Propagation Analysis in Color Measurement and Imaging, "Col. Res. Ap l, Vol. 2, pp.28 0-289 (1997))". ) Is shown.
- the diagonal component of equation (6) is just the noise variance of the input signal. If there is no correlation between input signal values, the covariance component (ie off-diagonal component) in the matrix component is zero. At this time, the variance-covariance matrix of the output signal ⁇ can be defined by the following equation (7).
- the noise variance value on the signal value can be calculated by the following equation (9). sigma "and cr a * b *
- TN a (MAT) one J TN k (MAT)... (10)
- TN k TN value of the kth color patch
- the TN value is a value highly correlated with the noise perceived by the human eye, taking into account both the brightness and color components of the noise.
- I a * b * Noise amount is defined by the following equation.
- wn Weight coefficient for noise amount
- the MAT coefficient is calculated by changing the above-mentioned CEM values wc and wn, and the color reproduction evaluation index ⁇ a and noise evaluation index TN a at that time are calculated. As shown in Fig. 15, a plot of [color reproduction vs. noise] is created with ⁇ a on the horizontal axis and TN a on the vertical axis. )
- the CN diagram shows the ability of the color filter set to be evaluated.
- the lower left area in Fig. 15 is an area where both color reproduction and noise are good, and the upper right area is both bad. Therefore, the closer the plot is to the lower left, the better the filter set. By performing this plot for each filter set to be evaluated and comparing them, it is possible to intuitively determine which filter set is superior.
- the locus of the CN diagram is a convex curve in the lower left, indicating that the color reproduction is good if the color reproducibility is good and the noise reproducibility is poor if the noise characteristic is good. The characteristic indicates a trade-off relationship.
- FIG. 16 shows a CN diagram of a hybrid image sensor, a primary color system three-color image sensor, and a complementary color system four-color image sensor according to the present invention.
- Reference mark No. 6 1 a is a plot of [color reproduction vs. noise] of the hybrid image sensor
- reference numeral 6 1 b is a plot of [color reproduction vs. noise] of the primary color system three-color image sensor
- reference numeral 6 1 c Is a plot of [color reproduction vs. noise] for a complementary color 4-color image sensor.
- the lower left of the CN diagram shown in Fig. 16 is the area where both the color reproduction and noise characteristics are good, so the one with the locus closest to the lower left is an imaging device with good characteristics.
- the plot 6 1a of the hybrid imaging element is at the bottom left, so both color reproducibility and noise characteristics are superior to the primary and complementary color imaging elements.
- an RGBYC image sensor is created with the arrangement shown in FIGS. 10A and 10B, and an IC (Integrated Circuit) that performs signal processing shown in FIG. 13 is created.
- Gamma correction uses s RGB gamma to calculate the RGB output signal.
- the coefficient of ⁇ is shown in Equation (1 3).
- LM (H) 7 1, LM (M) 7 2, and LM (L) 7 3 indicate linear matrix processing for high brightness, medium brightness, and low brightness, respectively.
- WB (H) 74, WB (M) 7 5, WB (L) 76 indicates white balance processing, and 7 7, 7 8 and 7 9 indicate multipliers that multiply the output signals by gain values a, b, and c, respectively.
- Figure 18 shows the transition of the weight gain coefficient with respect to changes in the luminance level (horizontal axis).
- the rise and fall of the gain coefficient are made to cross at an inclination so that the change is not noticeable.
- the gain coefficient is controlled by the brightness level (eg, G signal) for each sample after AZD (analog-to-digital) conversion of the RGB YC signal. Is provided.
- the linear matrix coefficients use RGB YC 5 signal values and use coefficients that emphasize noise characteristics.
- wc: w n l: A coefficient of 10 points (position of ⁇ mark 63 in Fig. 16) can be considered. The coefficient values are shown below.
- Eq. (14) has a larger weight for noise, so the absolute value of each coefficient is smaller and it can be seen that color separation noise does not increase.
- the linear matrix coefficients for medium luminance pixels are determined by using the RGB YC5 signal values at the point with the best balance between color reproducibility and noise characteristics.
- the coefficient is determined so as to get on the locus of the lower left position.
- the processing flow is as follows.
- LM (H) 7 1 When a pixel signal is input, the input signal value is subjected to three types of linear matrix processing (LM (H) 7 1, LM (M) 72, LM (L) 7 3 in Fig. 17), A signal value for each luminance level is calculated.
- LM (H) 7 1 When a pixel signal is input, the input signal value is subjected to three types of linear matrix processing (LM (H) 7 1, LM (M) 72, LM (L) 7 3 in Fig. 17), A signal value for each luminance level is calculated.
- LM (H) 7 1 When a pixel signal is input, the input signal value is subjected to three types of linear matrix processing (LM (H) 7 1, LM (M) 72, LM (L) 7 3 in Fig. 17), A signal value for each luminance level is calculated.
- Each signal value is subjected to white balance processing (WB (H) 74, WB (M) 75, WB (L) 7 6 in Fig. 17).
- a predetermined gain coefficient (a, b, c) is multiplied (multipliers 77, 78 and 79 in Fig. 17).
- the three types of output signals are added by the adders 80 and 8 1 in FIG. 17 to determine the output signal value of the pixel.
- the boundary between the low luminance level and the medium luminance level for example, the boundary between ISO400 and IS0200 can be considered.
- the boundary between the medium luminance and the high luminance level is, for example, when either the Y signal or the C signal is saturated.
- the present invention is not limited to the above-described embodiments, and various modifications based on the technical idea of the present invention are possible.
- different matrix calculation processing is performed for three levels of luminance levels, but different matrix calculation processing is performed for two levels (low / medium luminance level and high luminance level). May be performed.
- three colors Y C G may be used at the low luminance level, and five colors of RGB YC may be used at the medium luminance level.
- the present invention can be applied to devices having a blue-sensitive layer, a green-sensitive layer, and a red-sensitive layer in the same manner as a color film by stacking three CMOS structures.
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Color Television Image Signal Generators (AREA)
- Processing Of Color Television Signals (AREA)
- Optical Filters (AREA)
Abstract
Description





Claims
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP06700920A EP1729524B1 (en) | 2005-01-31 | 2006-01-12 | Imaging device and imaging element |
| US10/589,492 US7583303B2 (en) | 2005-01-31 | 2006-01-12 | Imaging device element |
| KR1020067020337A KR101200178B1 (ko) | 2005-01-31 | 2006-01-12 | 촬상 장치, 화상 처리 장치, 화상 처리 방법 및 촬상 소자 |
| CN2006800000715A CN1943248B (zh) | 2005-01-31 | 2006-01-12 | 摄像装置 |
| US12/437,139 US7868937B2 (en) | 2005-01-31 | 2009-05-07 | Imaging apparatus and imaging device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005022853A JP4265546B2 (ja) | 2005-01-31 | 2005-01-31 | 撮像装置、画像処理装置および画像処理方法 |
| JP2005-022853 | 2005-01-31 |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US11/589,492 A-371-Of-International US7779238B2 (en) | 2004-06-30 | 2006-10-30 | Method and apparatus for precisely identifying effective addresses associated with hardware events |
| US12/437,139 Division US7868937B2 (en) | 2005-01-31 | 2009-05-07 | Imaging apparatus and imaging device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2006080220A1 true WO2006080220A1 (ja) | 2006-08-03 |
Family
ID=36740254
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2006/300674 WO2006080220A1 (ja) | 2005-01-31 | 2006-01-12 | 撮像装置および撮像素子 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US7868937B2 (ja) |
| EP (1) | EP1729524B1 (ja) |
| JP (1) | JP4265546B2 (ja) |
| KR (1) | KR101200178B1 (ja) |
| CN (2) | CN101572824B (ja) |
| TW (2) | TW200627942A (ja) |
| WO (1) | WO2006080220A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8031243B2 (en) * | 2007-07-06 | 2011-10-04 | Samsung Electronics Co., Ltd. | Apparatus, method, and medium for generating image |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8363134B2 (en) | 2007-08-01 | 2013-01-29 | Sharp Kabushiki Kaisha | Color imaging device, imaging apparatus using the same, and filter |
| JP5080934B2 (ja) * | 2007-10-22 | 2012-11-21 | キヤノン株式会社 | 画像処理装置及び方法、及び撮像装置 |
| US8934034B2 (en) | 2008-03-28 | 2015-01-13 | The Trustees Of Columbia University In The City Of New York | Generalized assorted pixel camera systems and methods |
| KR101475464B1 (ko) | 2008-05-09 | 2014-12-22 | 삼성전자 주식회사 | 적층형 이미지 센서 |
| KR101315299B1 (ko) * | 2008-11-07 | 2013-10-14 | 삼성테크윈 주식회사 | 디지털 영상 처리장치 |
| JP5546166B2 (ja) * | 2009-06-19 | 2014-07-09 | キヤノン株式会社 | 撮像装置、信号処理方法、及びプログラム |
| JP2013509820A (ja) | 2009-10-28 | 2013-03-14 | ザ トラスティーズ オブ コロンビア ユニヴァーシティ イン ザ シティ オブ ニューヨーク | 符号化ローリングシャッタの方法およびシステム |
| JP5044673B2 (ja) * | 2010-03-25 | 2012-10-10 | 株式会社東芝 | 固体撮像装置および画像記録装置 |
| JP2012010276A (ja) * | 2010-06-28 | 2012-01-12 | Sony Corp | 画像処理装置、画像処理方法及び画像処理プログラム |
| TWI581638B (zh) * | 2011-01-28 | 2017-05-01 | Yasushi Nagamune | Image photographing apparatus and image photographing method |
| BR112013030805A2 (pt) * | 2011-06-30 | 2016-12-06 | Fujifilm Corp | aparelho de formação de imagem, método de controle de aparelho de formação de imagem, programa de controle de aparelho de formação de imagem |
| US9030575B2 (en) * | 2011-10-12 | 2015-05-12 | Apple Inc. | Transformations and white point constraint solutions for a novel chromaticity space |
| KR102328769B1 (ko) | 2014-06-20 | 2021-11-18 | 삼성전자주식회사 | 이미지 센서와 이를 포함하는 이미지 처리 시스템 |
| JP2017015996A (ja) * | 2015-07-02 | 2017-01-19 | 株式会社ジャパンディスプレイ | 表示装置 |
| US10735699B1 (en) | 2019-07-03 | 2020-08-04 | Qualcomm Incorporated | Computer vision sensor |
| WO2021131859A1 (ja) * | 2019-12-27 | 2021-07-01 | 株式会社ソシオネクスト | 画像処理装置および画像処理方法 |
| EP4124031A4 (en) * | 2020-03-16 | 2023-11-22 | Sony Semiconductor Solutions Corporation | IMAGING ELEMENT AND ELECTRONIC INSTRUMENT |
| EP3896967A1 (en) | 2020-04-17 | 2021-10-20 | Leica Microsystems CMS GmbH | Digital imaging device and method for generating a digital color image |
| WO2023085826A1 (ko) * | 2021-11-12 | 2023-05-19 | 삼성전자 주식회사 | 이미지를 생성하는 전자 장치 및 그 방법 |
| CN116095262B (zh) * | 2023-04-11 | 2023-08-22 | 北京仁光科技有限公司 | 用于处理视频信号源的移动处理设备、处理方法及系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000315784A (ja) * | 1999-04-30 | 2000-11-14 | Olympus Optical Co Ltd | カラー撮像素子及び撮像装置 |
| JP2001359114A (ja) * | 2000-06-09 | 2001-12-26 | Fuji Photo Film Co Ltd | 固体撮像素子を用いた画像取得装置および画像取得方法並びにその方法を実行するためのプログラムを記録した記録媒体 |
| EP1339238A2 (en) | 2002-02-26 | 2003-08-27 | Eastman Kodak Company | Four color image sensing apparatus |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL7900897A (nl) * | 1978-02-15 | 1979-08-17 | Hitachi Ltd | Vaste-stof beeldopneeminrichting. |
| US4437112A (en) * | 1980-02-15 | 1984-03-13 | Canon Kabushiki Kaisha | Solid-state color imaging apparatus |
| EP0113462B1 (en) | 1982-12-14 | 1990-08-16 | Matsushita Electric Industrial Co., Ltd. | Solid state color imaging apparatus |
| US4907074A (en) | 1985-10-31 | 1990-03-06 | Canon Kabushiki Kaisha | Image pickup apparatus having color separation filters and forming line-sequential luminance and color-difference signals |
| JPH0810940B2 (ja) | 1987-01-09 | 1996-01-31 | ソニー株式会社 | 輝度信号形成回路 |
| US5202756A (en) | 1988-11-09 | 1993-04-13 | Canon Kabushiki Kaisha | Color signal processing apparatus using plural luminance signals |
| US5280347A (en) | 1990-10-30 | 1994-01-18 | Canon Kabushiki Kaisha | Color image sensing device |
| JPH0884348A (ja) | 1994-09-09 | 1996-03-26 | Canon Inc | 撮像装置 |
| JP3392564B2 (ja) * | 1995-02-27 | 2003-03-31 | 三洋電機株式会社 | 単板式カラービデオカメラ |
| DE19616440A1 (de) | 1996-04-25 | 1997-10-30 | Eastman Kodak Co | Verfahren und Vorrichtung zur Gewinnung eines vollen Farbbildes oder Multispektralbildes aus Bilddaten eines CCD-Bildsensors mit Mosaik-Farbfilter |
| US6559886B1 (en) | 1997-12-04 | 2003-05-06 | Victor Company Of Japan, Limited | Video signal processing method and device |
| JP3432414B2 (ja) | 1998-04-20 | 2003-08-04 | 三菱電機株式会社 | 色変換装置および色変換方法 |
| JP4195169B2 (ja) | 2000-03-14 | 2008-12-10 | 富士フイルム株式会社 | 固体撮像装置および信号処理方法 |
| EP1360843A1 (en) * | 2001-02-06 | 2003-11-12 | Koninklijke Philips Electronics N.V. | Green reconstruction for image sensors |
| US7268757B2 (en) | 2001-06-11 | 2007-09-11 | Genoa Color Technologies Ltd | Device, system and method for color display |
| JP2003284084A (ja) * | 2002-03-20 | 2003-10-03 | Sony Corp | 画像処理装置および方法、並びに画像処理装置の製造方法 |
| JP2003330447A (ja) | 2002-05-15 | 2003-11-19 | Mitsubishi Electric Corp | 画像処理装置 |
| JP2004252620A (ja) | 2003-02-19 | 2004-09-09 | Sony Corp | 画像処理装置および方法、並びに、プログラム |
| JP2004289450A (ja) | 2003-03-20 | 2004-10-14 | Canon Inc | 情報処理方法及び装置及びプログラム、及びプログラムを格納する記憶媒体 |
| US7483095B2 (en) * | 2003-12-15 | 2009-01-27 | Genoa Color Technologies Ltd | Multi-primary liquid crystal display |
| JP2006023959A (ja) | 2004-07-07 | 2006-01-26 | Olympus Corp | 信号処理システム及び信号処理プログラム |
| KR100915068B1 (ko) * | 2004-08-19 | 2009-09-02 | 샤프 가부시키가이샤 | 다원색 표시 장치 및 액정 표시 장치 |
| JP4145852B2 (ja) | 2004-08-20 | 2008-09-03 | セイコーエプソン株式会社 | 電気光学装置、カラーフィルタ、及び電子機器 |
| EP1927969B1 (en) * | 2005-09-21 | 2017-05-24 | Sharp Kabushiki Kaisha | Color filter substrate and display device comprising such a substrate |
| KR20070115243A (ko) * | 2006-06-01 | 2007-12-05 | 삼성전자주식회사 | 이미지 촬상 장치, 및 그 동작 방법 |
-
2005
- 2005-01-31 JP JP2005022853A patent/JP4265546B2/ja not_active Expired - Fee Related
- 2005-12-14 TW TW094144298A patent/TW200627942A/zh not_active IP Right Cessation
- 2005-12-14 TW TW098102657A patent/TW200926797A/zh not_active IP Right Cessation
-
2006
- 2006-01-12 WO PCT/JP2006/300674 patent/WO2006080220A1/ja active Application Filing
- 2006-01-12 EP EP06700920A patent/EP1729524B1/en not_active Not-in-force
- 2006-01-12 CN CN2009102034124A patent/CN101572824B/zh not_active Expired - Fee Related
- 2006-01-12 KR KR1020067020337A patent/KR101200178B1/ko not_active IP Right Cessation
- 2006-01-12 CN CN2006800000715A patent/CN1943248B/zh not_active Expired - Fee Related
-
2009
- 2009-05-07 US US12/437,139 patent/US7868937B2/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000315784A (ja) * | 1999-04-30 | 2000-11-14 | Olympus Optical Co Ltd | カラー撮像素子及び撮像装置 |
| JP2001359114A (ja) * | 2000-06-09 | 2001-12-26 | Fuji Photo Film Co Ltd | 固体撮像素子を用いた画像取得装置および画像取得方法並びにその方法を実行するためのプログラムを記録した記録媒体 |
| EP1339238A2 (en) | 2002-02-26 | 2003-08-27 | Eastman Kodak Company | Four color image sensing apparatus |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP1729524A4 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8031243B2 (en) * | 2007-07-06 | 2011-10-04 | Samsung Electronics Co., Ltd. | Apparatus, method, and medium for generating image |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20070098960A (ko) | 2007-10-08 |
| US20090213251A1 (en) | 2009-08-27 |
| CN101572824A (zh) | 2009-11-04 |
| CN101572824B (zh) | 2012-06-06 |
| CN1943248B (zh) | 2012-05-02 |
| US7868937B2 (en) | 2011-01-11 |
| KR101200178B1 (ko) | 2012-11-13 |
| TW200926797A (en) | 2009-06-16 |
| JP4265546B2 (ja) | 2009-05-20 |
| TWI316365B (ja) | 2009-10-21 |
| EP1729524A1 (en) | 2006-12-06 |
| CN1943248A (zh) | 2007-04-04 |
| TWI316364B (ja) | 2009-10-21 |
| JP2006211478A (ja) | 2006-08-10 |
| EP1729524B1 (en) | 2012-11-14 |
| EP1729524A4 (en) | 2012-01-04 |
| TW200627942A (en) | 2006-08-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2006080220A1 (ja) | 撮像装置および撮像素子 | |
| US7400332B2 (en) | Hexagonal color pixel structure with white pixels | |
| US9160935B2 (en) | Sensor arrangement for transforming color space representation in a digital color image | |
| US20070159542A1 (en) | Color filter array with neutral elements and color image formation | |
| US20060012808A1 (en) | Image processing device, image processing method, and image processing device manufacturing method | |
| CN101494795B (zh) | 使用绿色光谱范围重叠的单位像素群的图像传感器及方法 | |
| US7583303B2 (en) | Imaging device element | |
| JP2008022521A (ja) | 固体撮像素子 | |
| JP2007259344A (ja) | 撮像装置および画像処理方法 | |
| US9060159B2 (en) | Image processing device and method, and imaging device | |
| US9160999B2 (en) | Image processing device and imaging device | |
| WO2007145087A1 (ja) | 撮像装置及び信号処理方法 | |
| JP4285587B2 (ja) | 撮像素子 | |
| WO2007082289A2 (en) | Color filter array with neutral elements and color image formation | |
| EP0368614B1 (en) | Color signal processing apparatus | |
| KR101137611B1 (ko) | 이미지 데이터 변환 절차를 효과적으로 수행하는 시스템 및 방법 | |
| JP3576600B2 (ja) | カラー撮像装置 | |
| JP4309506B2 (ja) | 撮像素子及び撮像装置 | |
| JP2005278213A (ja) | 製造方法 | |
| JPWO2018061615A1 (ja) | 撮像装置 | |
| JPH089395A (ja) | カラー撮像装置 | |
| JP2000050292A (ja) | 信号処理装置およびその信号処理方法 | |
| JP2001045503A (ja) | カメラ信号処理装置及びカメラ信号処理方法 | |
| JP2007267404A (ja) | 画像処理装置の製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 10589492 Country of ref document: US |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 200680000071.5 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application | ||
| WWE | Wipo information: entry into national phase |
Ref document number: 2006700920 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 1020067020337 Country of ref document: KR |
|
| WWP | Wipo information: published in national office |
Ref document number: 2006700920 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |