RU2676492C2 - Хирургический сшивающий инструмент с вращательным кулачковым приводом и возвратом - Google Patents
Хирургический сшивающий инструмент с вращательным кулачковым приводом и возвратом Download PDFInfo
- Publication number
- RU2676492C2 RU2676492C2 RU2016115744A RU2016115744A RU2676492C2 RU 2676492 C2 RU2676492 C2 RU 2676492C2 RU 2016115744 A RU2016115744 A RU 2016115744A RU 2016115744 A RU2016115744 A RU 2016115744A RU 2676492 C2 RU2676492 C2 RU 2676492C2
- Authority
- RU
- Russia
- Prior art keywords
- cam
- assembly
- ejector
- activator
- engine
- Prior art date
Links
Images















































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/02—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors
- A61B17/0206—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors with antagonistic arms as supports for retractor elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/11—Surgical instruments, devices or methods, e.g. tourniquets for performing anastomosis; Buttons for anastomosis
- A61B17/115—Staplers for performing anastomosis in a single operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/11—Surgical instruments, devices or methods, e.g. tourniquets for performing anastomosis; Buttons for anastomosis
- A61B17/115—Staplers for performing anastomosis in a single operation
- A61B17/1155—Circular staplers comprising a plurality of staples
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00199—Electrical control of surgical instruments with a console, e.g. a control panel with a display
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00221—Electrical control of surgical instruments with wireless transmission of data, e.g. by infrared radiation or radiowaves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00398—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like using powered actuators, e.g. stepper motors, solenoids
Abstract
Изобретение относится к медицинской технике. Хирургический круговой сшивающий инструмент содержит корпус, ствол, сшивающий узел, двигатель, кулачковый узел и пусковой узел. Ствол проходит из корпуса дистально. Сшивающий узел присоединен к дистальному концу ствола. Продольное поступательное перемещение пускового узла вызывает выталкивание из сшивающего узла множества скобок в виде кольцевого набора для соединения друг с другом двух просветов ткани. Сшивающий узел дополнительно может приводить в движение скальпель, чтобы отсекать любые излишки ткани внутри кольцевого набора скобок. Двигатель выполнен с возможностью вращения кулачкового узла. Вращение кулачкового узла вызывает продольное поступательное перемещение пускового узла. Один оборот кулачкового узла позволяет приводить в движение пусковой узел из проксимального положения в дистальное положение и обратно в проксимальное положение. 3 н. и 16 з.п. ф-лы, 42 ил.
Description
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В некоторых ситуациях хирургу может потребоваться позиционировать хирургический инструмент через отверстие в организме пациента и применять инструмент для регулировки, позиционирования, прикрепления и/или другого взаимодействия с тканью внутри организма пациента. Например, в некоторых хирургических вмешательствах (например, колоректальных, бариатрических, торакотомических и т. д.) части желудочно-кишечного тракта и/или пищевода и т. д. можно рассечь и удалить для устранения нежелательной ткани или по другим причинам. После удаления требуемой ткани может возникнуть необходимость в повторном соединении оставшихся частей вместе посредством анастомоза «конец в конец». Одним таким инструментом для выполнения этих анастомотических процедур является круговой сшивающий инструмент, который вставляют через естественное отверстие в организме пациента. Некоторые круговые сшивающие инструменты выполнены с возможностью по существу одновременного рассекания ткани и сшивания ткани. Например, круговой сшивающий инструмент может отсекать излишек ткани, находящийся внутри кольцевого набора скобок в анастомозе, обеспечивая по существу плавный переход между соединяемыми частями просвета в анастомозе.
Примеры круговых хирургических сшивающих инструментов описаны в патенте США № 5,205,459, озаглавленном «Хирургический сшивающий инструмент для наложения анастомоза», выданном 27 апреля 1993 г.; патенте США № 5,271,544, озаглавленном «Хирургический сшивающий инструмент для наложения анастомоза», выданном 21 декабря 1993 г.; патенте США № 5,275,322, озаглавленном «Хирургический сшивающий инструмент для наложения анастомоза», выданном 4 января 1994 г.; патенте США № 5,285,945, озаглавленном «Хирургический сшивающий инструмент для наложения анастомоза», выданном 15 февраля 1994 г.; патенте США № 5,292,053, озаглавленном «Хирургический сшивающий инструмент для наложения анастомоза», выданном 8 марта 1994 г.; патенте США № 5,333,773, озаглавленном «Хирургический сшивающий инструмент для наложения анастомоза», выданном 2 августа 1994 г.; патенте США № 5,350,104, озаглавленном «Хирургический сшивающий инструмент для наложения анастомоза», выданном 27 сентября 1994 г.; и патенте США № 5,533,661, озаглавленном «Хирургический сшивающий инструмент для наложения анастомоза», выданном 9 июля 1996 г.; и патентной публикации США № 2012/0292372, озаглавленной «Недорогой узел упора для кругового сшивающего инструмента», опубликованной 22 ноября 2012 г. Описание каждого из приведенных выше патентов США и патентной публикации США включено в настоящий документ путем ссылки. Некоторые такие сшивающие инструменты выполнены с возможностью зажимания слоев ткани, рассечения зажатых слоев ткани и выталкивания скобок через слои ткани, чтобы по существу запечатать рассеченные слои ткани вместе с находящимися рядом рассеченными концами слоев ткани, соединяя таким образом два рассеченных конца анатомического просвета.
Исключительно в качестве других дополнительных примеров приводятся хирургические сшивающие инструменты, описанные в патенте США № 4,805,823, озаглавленном «Конфигурация углублений в сшивающих инструментах для внутренних органов», выданном 21 февраля 1989 г.; патенте США № 5,415,334, озаглавленном «Хирургический сшивающий инструмент и кассета со скобками», выданном 16 мая 1995 г.; патенте США № 5,465,895, озаглавленном «Хирургический сшивающий инструмент», выданном 14 ноября 1995 г.; патенте США № 5,597,107, озаглавленном «Хирургический сшивающий инструмент», выданном 28 января 1997 г.; патенте США № 5,632,432, озаглавленном «Хирургический инструмент», выданном 27 мая 1997 г.; патенте США № 5,673,840, озаглавленном «Хирургический инструмент», выданном 7 октября 1997 г.; патенте США № 5,704,534, озаглавленном «Узел шарнира для хирургических инструментов», выданном 6 января 1998 г.; патенте США № 5,814,055, озаглавленном «Хирургический зажимной механизм», выданном 29 сентября 1998 г.; патенте США № 6,978,921, озаглавленном «Хирургический сшивающий инструмент со встроенным пусковым механизмом с трехрогим элементом», выданном 27 декабря 2005 г.; патенте США № 7,000,818, озаглавленном «Хирургический сшивающий инструмент, имеющий отдельные и отличные друг от друга закрывающую и пусковую системы», выданном 21 февраля 2006 г.; патенте США № 7,143,923, озаглавленном «Хирургический сшивающий инструмент, имеющий пусковую блокировку для незакрытого упора», выданном 5 декабря 2006 г.; патенте США № 7,303,108, озаглавленном «Хирургический сшивающий инструмент со встроенным многотактовым пусковым механизмом с гибкой рейкой», выданном 4 декабря 2007 г.; патенте США № 7,367,485, озаглавленном «Хирургический сшивающий инструмент со встроенным многотактовым пусковым механизмом, имеющим поворотную трансмиссию», выданном 6 мая 2008 г.; патенте США № 7,380,695, озаглавленном «Хирургический сшивающий инструмент, имеющий единственный механизм блокировки для предотвращения пуска», выданном 3 июня 2008 г.; патенте США № 7,380,696, озаглавленном «Шарнирный хирургический сшивающий инструмент со встроенным двухкомпонентным пусковым механизмом с трехрогим элементом», выданном 3 июня 2008 г.; патенте США № 7,404,508, озаглавленном «Хирургическое сшивающее и рассекающее устройство», выданном 29 июля 2008 г.; патенте США № 7,434,715, озаглавленном «Хирургический сшивающий инструмент, имеющий многотактовый пуск с блокировкой открытия», выданном 14 октября 2008 г.; и патенте США № 7,721,930, озаглавленном «Одноразовая кассета с адгезивным составом для использования со сшивающим устройством», выданном 25 мая 2010 г. Описание каждого из процитированных выше патентов США включено в настоящий документ путем ссылки. Хотя упомянутые выше хирургические сшивающие инструменты описаны в связи с применением в эндоскопических процедурах, следует понимать, что такие хирургические сшивающие инструменты также можно применять в открытых процедурах и/или других неэндоскопических процедурах.
Хотя были изготовлены и применялись различные типы хирургических сшивающих инструментов и связанных с ними компонентов, считается, что до изобретателя (-ей) никто не изготовил или не применял изобретение, описанное в приложенной формуле изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Хотя описание ограничивается формулой изобретения, которая подробно показывает и четко заявляет права на эту технологию, считается, что лучшему пониманию данной технологии послужит следующее описание некоторых примеров в сочетании с сопровождающими чертежами, на которых похожие числовые обозначения идентифицируют одинаковые элементы.
На ФИГ. 1 показан вид сбоку в вертикальной проекции примера кругового хирургического сшивающего инструмента.
На ФИГ. 2A показан увеличенный вид в продольном сечении примера узла сшивающей головки инструмента, изображенного на ФИГ. 1, на котором пример упора показан в открытом положении.
На ФИГ. 2B показан увеличенный вид в продольном сечении узла сшивающей головки, изображенного на ФИГ. 2A, на котором упор показан в закрытом положении.
На ФИГ. 2C показан увеличенный вид в продольном сечении узла сшивающей головки, изображенного на ФИГ. 2A, на котором примеры выталкивателя скобок и лезвия показаны в активированном положении.
На ФИГ. 3 показан увеличенный частичный вид в поперечном сечении примера скобки, образованной об упор.
На ФИГ. 4A показан увеличенный вид сбоку в вертикальной проекции примера узла рукоятки активатора хирургического инструмента, изображенного на ФИГ. 1, с удаленным участком корпуса, на котором спусковой механизм показан в неактивированном положении, а блокирующий элемент показан в заблокированном положении.
На ФИГ. 4B показан увеличенный вид сбоку в вертикальной проекции узла рукоятки активатора, изображенного ФИГ. 4A, на котором спусковой механизм показан в активированном положении, а блокирующий элемент показан в незаблокированном положении.
На ФИГ. 5 показан увеличенный частичный вид в перспективе примера узла индикатора хирургического инструмента, изображенного на ФИГ. 1, на котором показаны окошко индикатора и рычаг индикатора.
На ФИГ. 6 показан схематичный вид окошка индикатора, изображенного на ФИГ. 5, на котором показан пример планки индикатора и примеры представлений соответствующих скобок.
На ФИГ. 7 показан вид в перспективе примера альтернативного кругового хирургического сшивающего инструмента, имеющего двигатель, и пример цилиндрического кулачка.
На ФИГ. 8 показан вид в перспективе примера корпуса кулачкового следящего элемента.
На ФИГ. 9 показан вид в перспективе с пространственным разделением компонентов пусковой системы, включающей корпус кулачкового следящего элемента, изображенного на ФИГ. 8.
На ФИГ. 10 показан вид в перспективе цилиндрического кулачка, изображенного на ФИГ. 7.
На ФИГ. 11A показан вид сбоку в вертикальной проекции инструмента, изображенного на ФИГ. 7, с двигателем и цилиндрическим кулачком в первом поворотном положении.
На ФИГ. 11B показан вид сбоку в вертикальной проекции инструмента, изображенного на ФИГ. 7, с двигателем и цилиндрическим кулачком во втором поворотном положении.
На ФИГ. 11C показан вид сбоку в вертикальной проекции инструмента, изображенного на ФИГ. 7, с двигателем и цилиндрическим кулачком в третьем поворотном положении.
На ФИГ. 11D показан вид сбоку в вертикальной проекции инструмента, изображенного на ФИГ. 7, с двигателем и цилиндрическим кулачком в четвертом поворотном положении.
На ФИГ. 11E показан вид сбоку в вертикальной проекции инструмента, изображенного на ФИГ. 7, с двигателем и цилиндрическим кулачком, вернувшимися в первое поворотное положение после завершения пускового такта.
На ФИГ. 12 показан вид сбоку в вертикальной проекции примера альтернативного цилиндрического кулачка, который можно встроить в инструмент, изображенный на ФИГ. 7.
На ФИГ. 13 показан вид в перспективе другого примера альтернативного цилиндрического кулачка, который можно встроить в инструмент, изображенный на ФИГ. 7.
На ФИГ. 14 показан вид в перспективе двигателя и примера альтернативного кулачка, который можно встроить в инструмент, изображенный на ФИГ. 7.
На ФИГ. 15 показан вид в вертикальной проекции спереди двигателя и кулачка, изображенных на ФИГ. 14.
На ФИГ. 16A показан вид сбоку в вертикальной проекции примера кругового хирургического сшивающего инструмента с двигателем и кулачком, изображенными на ФИГ. 14, в первом поворотном положении.
На ФИГ. 16B показан вид сбоку в вертикальной проекции инструмента, изображенного на ФИГ. 16A, с двигателем и кулачком, изображенными на ФИГ. 14, во втором поворотном положении.
На ФИГ. 16C показан вид сбоку в вертикальной проекции инструмента, изображенного на ФИГ. 16A, с двигателем и кулачком, изображенными на ФИГ. 14, в третьем поворотном положении.
На ФИГ. 16D показан вид сбоку в вертикальной проекции инструмента, изображенного на ФИГ. 16A, с двигателем и кулачком, изображенными на ФИГ. 14, в четвертом поворотном положении.
На ФИГ. 16E показан вид сбоку в вертикальной проекции инструмента, изображенного на ФИГ. 16A, с двигателем и кулачком, изображенными на ФИГ. 14, вернувшимися в первое поворотное положение после завершения пускового такта.
На ФИГ. 17 показан вид сбоку в поперечном сечении примера элемента блокирующего кулачка.
На ФИГ. 18 показан вид в перспективе двигателя и примера альтернативного кулачка, который можно встроить в инструмент, изображенный на ФИГ. 7.
На ФИГ. 19 показан вид в вертикальной проекции спереди двигателя и кулачка, изображенных на ФИГ. 18.
На ФИГ. 20 показан вид сбоку в поперечном сечении примера альтернативного элемента блокирующего кулачка.
На ФИГ. 21 показан вид в перспективе двигателя и примера другого альтернативного кулачка, который можно встроить в инструмент, изображенный на ФИГ. 7.
На ФИГ. 22 показан вид в вертикальной проекции спереди двигателя и кулачка, изображенных на ФИГ. 21.
На ФИГ. 23 показан вид сбоку в поперечном сечении другого примера альтернативного элемента блокирующего кулачка.
На ФИГ. 24A показан вид в перспективе двигателя и примера многокулачкового ствола, который можно встроить в инструмент, изображенный на ФИГ. 7, в первом поворотном положении.
На ФИГ. 24B показан вид в перспективе двигателя и многокулачкового ствола, изображенных на ФИГ. 24A, во втором поворотном положении.
На ФИГ. 25A показан вид в перспективе двигателя и примера альтернативного многокулачкового ствола, который можно встроить в инструмент, изображенный на ФИГ. 7, в первом поворотном положении.
На ФИГ. 25B показан вид в перспективе двигателя и многокулачкового ствола, изображенных на ФИГ. 25A, во втором поворотном положении.
На ФИГ. 26A показан вид спереди в вертикальной проекции двигателя и многокулачкового ствола, изображенных на ФИГ. 25A, в первом поворотном положении.
На ФИГ. 26B показан вид спереди в вертикальной проекции двигателя и многокулачкового ствола, изображенных на ФИГ. 25A, во втором поворотном положении.
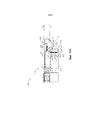
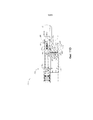
На ФИГ. 27 показан вид сбоку в вертикальной проекции другого примера альтернативного кругового хирургического сшивающего инструмента, имеющего наклонно ориентированный двигатель.
На ФИГ. 28 показан вид сбоку в вертикальной проекции другого примера альтернативного кругового хирургического сшивающего инструмента, имеющего наклонно ориентированный двигатель.
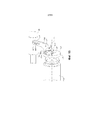
На ФИГ. 29 показан увеличенный вид сбоку в вертикальной проекции многокулачкового приводного узла инструмента, изображенного на ФИГ. 28.
На ФИГ. 30 показан вид в перспективе многокулачкового приводного узла, изображенного на ФИГ. 29.
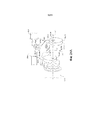
На ФИГ. 31 показан другой увеличенный вид сбоку в вертикальной проекции многокулачкового приводного узла, изображенного на ФИГ. 29.
На ФИГ. 32 показан вид в перспективе кулачкового следящего элемента многокулачкового приводного узла, изображенного на ФИГ. 29.
На ФИГ. 33 показан вид в перспективе первого кулачка многокулачкового приводного узла, изображенного на ФИГ. 29.
На ФИГ. 34 показан вид в перспективе второго кулачка многокулачкового приводного узла, изображенного на ФИГ. 29.
На ФИГ. 35 показан увеличенный вид сбоку в вертикальной проекции другого примера многокулачкового приводного узла для применения в круговом хирургическом сшивающем инструменте, имеющем наклонно ориентированный двигатель.
На ФИГ. 36 показан вид в перспективе многокулачкового приводного узла, изображенного на ФИГ. 35.
На ФИГ. 37 показан вид в перспективе кулачкового элемента многокулачкового приводного узла, изображенного на ФИГ. 35.
На ФИГ. 38 показан вид спереди в вертикальной проекции кулачкового элемента, изображенного на ФИГ. 37.
На ФИГ. 39 показан вид в перспективе кулачкового следящего элемента многокулачкового приводного узла, изображенного на ФИГ. 35.
На ФИГ. 40 показан другой вид в перспективе кулачкового следящего элемента, изображенного на ФИГ. 39.
На ФИГ. 41A показан другой увеличенный вид сбоку в вертикальной проекции многокулачкового приводного узла, изображенного на ФИГ. 35, в исходном положении.
На ФИГ. 41B показан другой увеличенный вид сбоку в вертикальной проекции многокулачкового приводного узла, изображенного на ФИГ. 35, в активированном положении.
На ФИГ. 42 показан пример профиля усилия, связанного с пусковым тактом кругового хирургического сшивающего инструмента.
Предполагается, что чертежи не являются ограничивающими каким-либо образом, и считается, что различные варианты осуществления технологии можно реализовать множеством других способов, включая те, которые необязательно показаны на чертежах. Прилагаемые чертежи, включенные в спецификацию и формирующие ее часть, иллюстрируют несколько аспектов данной технологии и вместе с описанием служат для объяснения принципов технологии; при этом понимается, что эта технология не ограничивается конкретными изображенными конструкциями.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Следующее описание некоторых примеров технологии не следует использовать для ограничения объема настоящего изобретения. Другие примеры, элементы, аспекты, варианты осуществления и преимущества технологии станут понятны специалистам в данной области из следующего описания, в котором для целей иллюстрации предложен один из лучших способов реализации технологии. После реализации технология, описанная в настоящем документе, может иметь другие разные и очевидные аспекты, все из которых не выходят за рамки технологии. Соответственно, чертежи и описания следует рассматривать как иллюстративные по своей сути и не имеющие ограничительного характера.
I. Обзор примера кругового хирургического сшивающего инструмента
На ФИГ. 1–6 представлен пример кругового хирургического сшивающего инструмента (10), имеющего узел (20) сшивающей головки, узел (60) ствола и узел (70) рукоятки активатора, каждый из которых описан более подробно ниже. Узел (60) ствола проходит дистально от узла (70) рукоятки активатора, и узел (20) сшивающей головки соединен с дистальным концом узла (60) ствола. Вкратце, узел (70) рукоятки активатора выполнен с возможностью приведения в действие выталкивателя (24) скобок узла (20) сшивающей головки для выталкивания множества скобок (66) за пределы узла (20) сшивающей головки. Скобки (66) сгибаются с образованием готовых скобок упором (40), который прикреплен к дистальному концу инструмента (10). Таким образом, ткань (2), изображенную на ФИГ. 2A–2C, можно сшить с использованием инструмента (10).
В настоящем примере инструмент (10) содержит закрывающую систему и пусковую систему. Закрывающая система содержит троакар (38), активатор (39) троакара и вращательную ручку (98). Упор (40) может быть соединен с дистальным концом троакара (38). Вращательная ручка (98) выполнена с возможностью поступательного перемещения троакара (38) продольно относительно узла (20) сшивающей головки, таким образом она может поступательно перемещать упор (40), когда упор (40) соединен с троакаром (38), чтобы зажимать ткань между упором (40) и узлом (20) сшивающей головки. Пусковая система содержит спусковой механизм (74), узел (84) активации спускового механизма, активатор (64) выталкивателя и выталкиватель (24) скобок. Выталкиватель (24) скобок включает в себя скальпель (36), выполненный с возможностью рассечения ткани, когда выталкиватель (24) скобок приводится в действие продольно. Кроме того, скобки (66) расположены дистально относительно множества выталкивающих скобки элементов (30) выталкивателя (24) скобок так, что выталкиватель (24) скобок также выталкивает скобки (66) дистально, когда выталкиватель (24) скобок приводится в действие продольно. Таким образом, когда спусковой механизм (74) приведен в действие, и узел (84) активации спускового механизма приводит в действие выталкиватель (24) скобок посредством активатора (64) выталкивателя, скальпель (36) и элементы (30) по существу одновременно рассекают ткань (2) и выталкивают скобки (66) дистально в ткань относительно узла (20) сшивающей головки. Компоненты и функциональные возможности закрывающей системы и пусковой системы более подробно описаны ниже.
A. Пример упора
Как показано на ФИГ. 1–2C, упор (40) выполнен с возможностью избирательного соединения с инструментом (10) для обеспечения поверхности, о которую могут быть согнуты скобки (66) для сшивания материала, содержащегося между узлом (20) сшивающей головки и упором (40). Упор (40) настоящего примера может быть выполнен с возможностью избирательного соединения с троакаром или заостренным штоком (38), который проходит дистально относительно узла (20) сшивающей головки. Как показано на ФИГ. 2A–2C, упор (40) выполнен с возможностью избирательного соединения посредством соединения проксимального ствола (42) упора (40) с дистальным кончиком троакара (38). Упор (40) содержит по существу круговую головку (48) упора и проксимальный ствол (42), проходящий проксимально из головки (48) упора. В показанном примере проксимальный ствол (42) содержит трубчатый элемент (44), имеющий упруго смещенные фиксаторы (46) для избирательного присоединения упора (40) к троакару (38), хотя этот пример не является обязательным, и следует понимать, что можно использовать и другие удерживающие элементы для соединения упора (40) с троакаром (38). Например, для соединения упора (40) с троакаром (38) можно использовать C-образные зажимы, фиксаторы, резьбу, штифты, адгезивы и т. п. Кроме того, хотя упор (40) описан как выполненный с возможностью избирательного соединения с троакаром (38), в некоторых вариантах проксимальный ствол (42) может включать в себя односторонний соединительный элемент, так что упор (40) невозможно удалить с троакара (38) после прикрепления упора (40). Только для примера, односторонние элементы включают в себя зазубрины, односторонние защелки, цанги, кольца, язычки, полосы и т. д. Разумеется, обычному специалисту в данной области будут очевидны и другие конфигурации для соединения упора (40) с троакаром (38) в контексте идей, представленных в настоящем документе. Например, вместо этого троакар (38) может представлять собой полый ствол, а проксимальный ствол (42) может содержать заостренный шток, выполненный с возможностью вставки в полый ствол.
Головка (48) упора настоящего примера содержит множество формирующих скобки углублений (52), образованных в проксимальной поверхности (50) головки (48) упора. Соответственно, когда упор (40) находится в закрытом положении, а скобки (66) выталкиваются за пределы узла (20) сшивающей головки в формирующие скобки углубления (52), как показано на ФИГ. 2C, ножки (68) скобок (66) сгибаются с образованием завершенных скобок.
Так как упор (40) является отдельным компонентом, следует понимать, что упор (40) можно вставить и присоединить к участку ткани (2) перед соединением с узлом (20) сшивающей головки. Только в качестве примера, упор (40) можно вставить в первый трубчатый участок ткани (2) и присоединить к нему, тогда как инструмент (10) вставляют во второй трубчатый участок ткани (2) и присоединяют к нему. Например, первый трубчатый участок ткани (2) можно пришить к участку упора (40) или вокруг него, а второй трубчатый участок ткани (2) можно пришить к троакару (38) или вокруг него.
Как показано на ФИГ. 2A, упор (40) впоследствии соединяется с троакаром (38). Троакар (38) настоящего примера показан в самом дистальном активированном положении. Такое выдвинутое положение троакара (38) может обеспечить более большую площадь, с которой можно соединить ткань (2) перед прикреплением упора (40). Кроме того, выдвинутое положение троакара (38) также может обеспечивать более простое прикрепление упора (40) к троакару (38). Троакар (38) дополнительно включает в себя сужающийся дистальный кончик. Такой кончик способен прокалывать ткань и/или способствовать вставке упора (40) на троакар (38), хотя сужающийся дистальный кончик является необязательным. Например, в других вариантах троакар (38) может иметь тупой кончик. В дополнительном или альтернативном варианте осуществления троакар (38) может включать в себя магнитный участок (не показан), который может притягивать упор (40) к троакару (38). Конечно, обычному специалисту в данной области будут понятны и другие дополнительные конфигурации и конструкции упора (40) и троакара (38) в контексте идей, представленных в настоящем документе.
Когда упор (40) соединен с троакаром (38), расстояние между проксимальной поверхностью упора (40) и дистальной поверхностью узла (20) сшивающей головки формирует расстояние зазора d. Троакар (38) настоящего примера имеет возможность поступательного перемещения продольно относительно узла (20) сшивающей головки посредством регулировочной ручки (98), размещенной у проксимального конца узла (70) рукоятки активатора, как более подробно описано ниже. Соответственно, когда упор (40) соединен с троакаром (38), вращение регулировочной ручки (98) увеличивает или уменьшает расстояние зазора d путем активации упора (40) относительно узла (20) сшивающей головки. Например, как последовательно показано на ФИГ. 2A–2B, упор (40) показан приведенным в действие относительно узла (70) рукоятки активатора проксимально из исходного открытого положения в закрытое положение, таким образом уменьшая расстояние зазора d и расстояние между двумя участками соединяемой ткани (2). После того как расстояние зазора d доведено до пределов предварительно заданного диапазона, можно активировать узел (20) сшивающей головки, как показано на ФИГ. 2C, для сшивания и рассечения ткани (2) между упором (40) и узлом (20) сшивающей головки. Узел (20) сшивающей головки выполнен с возможностью сшивания и рассечения ткани (2) пользователем путем поворота спускового механизма (74) узла (70) рукоятки активатора, как более подробно описано ниже.
Как указано выше, расстояние зазора d соответствует расстоянию между упором (40) и узлом (20) сшивающей головки. Когда инструмент (10) вставлен в организм пациента, данное расстояние зазора d может не быть легко видимым. Таким образом, обеспечивается выполненная с возможностью перемещения планка (110) индикатора, показанная на ФИГ. 5–6, видимая через окошко (120) индикатора, расположенное напротив спускового механизма (74). Планка (110) индикатора выполнена с возможностью перемещения в ответ на вращение регулировочной ручки (98) так, что положение планки (110) индикатора представляет расстояние зазора d. Как показано на ФИГ. 6, окошко (120) индикатора дополнительно содержит шкалу (130), которая указывает, что зазор упора находится в пределах желательного диапазона эксплуатации (например, область зеленого цвета, или «зеленая зона»), и соответствующее представление сжатия скобки на каждом конце шкалы (130). Только в качестве примера, как показано на ФИГ. 6, первое изображение (132) скобки показывает большую высоту скобки, тогда как второе изображение (134) скобки показывает малую высоту скобки. Соответственно, пользователь может видеть положение соединенного упора (40) относительно узла (20) сшивающей головки посредством планки (110) индикатора и шкалы (130). Впоследствии пользователь может отрегулировать расположение упора (40) посредством регулировочной ручки (98) соответствующим образом.
Как также показано на ФИГ. 2A–2C, пользователь прошивает участок ткани (2) вокруг трубчатого элемента (44) так, что головка (48) упора размещается внутри участка прошиваемой скобками ткани (2). Когда ткань (2) прикрепляется к упору (40), фиксаторы (46) и участок трубчатого элемента (44) выступают из ткани (2) так, что пользователь может присоединить упор (40) к троакару (38). Когда ткань (2) соединена с троакаром (38) и/или другим участком узла (20) сшивающей головки, пользователь прикрепляет упор (40) к троакару (38) и приводит в действие упор (40) проксимально к узлу (20) сшивающей головки, сокращая расстояние зазора d. После того как инструмент (10) окажется в пределах диапазона эксплуатации, пользователь сшивает вместе концы ткани (2), таким образом формируя по существу непрерывный трубчатый участок ткани (2).
Упор (40) дополнительно может быть выполнен в соответствии с, по меньшей мере, некоторыми из идей патента США № 5,205,459; патента США № 5,271,544; патента США № 5,275,322; патента США № 5,285,945; патента США № 5,292,053; патента США № 5,333,773; патента США № 5,350,104; патента США № 5,533,661; и/или патентной публикации США № 2012/0292372, описания которых включены в настоящий документ путем ссылки; и/или в соответствии с другими конфигурациями, которые будут очевидны обычному специалисту в данной области в контексте идей, представленных в настоящем документе.
B. Пример узла сшивающей головки
Узел (20) сшивающей головки настоящего примера соединен с дистальным концом узла (60) ствола и содержит трубчатый корпус (22), вмещающий выталкиватель (24) скобок, выполненный с возможностью скольжения, и множество скобок (66), содержащихся внутри углублений (32) для скобок. Скобки (66) и углубления (32) для скобок размещены в виде кругового набора вокруг трубчатого корпуса (22). В настоящем примере скобки (66) и углубления (32) для скобок размещены в виде пары концентрических кольцевых рядов скобок (66) и углублений (32) для скобок. Выталкиватель (24) скобок выполнен с возможностью приведения в действие внутри трубчатого корпуса (22) продольно в ответ на вращение спускового механизма (74) узла (70) рукоятки активатора. Как показано на ФИГ. 2A–2C, выталкиватель (24) скобок содержит расширяющийся цилиндрический элемент, имеющий отверстие (26) троакара, центральное углубление (28) и множество элементов, (30) расположенных по окружности вокруг центрального углубления (28) и проходящих дистально относительно узла (60) ствола. Каждый элемент (30) выполнен с возможностью контакта с соответствующей скобкой (66) из множества скобок (66) внутри углублений (32) для скобок и ее зацепления. Соответственно, когда выталкиватель (24) скобок приведен в действие относительно узла (70) рукоятки активатора дистально, каждый элемент (30) выталкивает соответствующую скобку (66) за пределы ее углубления (32) для скобки через отверстие (34) для скобки, образованное в дистальном конце трубчатого корпуса (22). Поскольку каждый элемент (30) проходит из выталкивателя (24) скобок, множество скобок (66) выталкивается за пределы узла (20) сшивающей головки по существу в одно и то же время. Когда упор (40) находится в закрытом положении, скобки (66) выталкиваются в формирующие скобки углубления (52) для сгибания ножек (68) скобок (66), таким образом сшивая материал, размещенный между упором (40) и узлом (20) сшивающей головки. На ФИГ. 3 показан один пример скобки (66), выталкиваемой элементом (30) в формирующее скобку углубление (32) упора (40) для сгибания ножек (68).
Выталкиватель (24) скобок дополнительно включает в себя цилиндрический скальпель (36), который расположен соосно c отверстием (26) для троакара и вставляется из углублений (32) для скобок. В настоящем примере цилиндрический скальпель (36) размещен внутри центрального углубления (28) для поступательного перемещения дистально выталкивателем (24) скобок. Когда упор (40) присоединен к троакару (38), как описано выше, головка (48) упора обеспечивает поверхность, вплотную к которой цилиндрический скальпель (36) рассекает материал, содержащийся между упором (40) и узлом (20) сшивающей головки. В некоторых вариантах головка (48) упора может включать в себя углубление (не показано) для цилиндрического скальпеля (36), чтобы способствовать рассечению материала (например, путем обеспечения объединенного срезающего края). В дополнительном или альтернативном варианте осуществления головка (48) упора может включать в себя один или более противоположных цилиндрических скальпелей (не показаны), смещенных от цилиндрического скальпеля (36) так, что можно обеспечить рассечение ножничного типа. Обычному специалисту в данной области будут понятны и другие конфигурации в контексте идей, представленных в настоящем документе. Таким образом, узел (20) сшивающей головки выполнен с возможностью как сшивания, так и рассечения ткани (2) по существу одновременно в ответ на приведение в действие узла (70) рукоятки активатора.
Конечно, узел (20) сшивающей головки дополнительно может быть сконструирован в соответствии по меньшей мере с некоторыми из идей патента США № 5,205,459; патента США № 5,271,544; патента США № 5,275,322; патента США № 5,285,945; патента США № 5,292,053; патента США № 5,333,773; патента США № 5,350,104; патента США № 5,533,661; и/или патентной публикации США № 2012/0292372, описания которых включены в настоящий документ путем ссылки; и/или в соответствии с другими конфигурациями, которые будут очевидны обычному специалисту в данной области в контексте идей, представленных в настоящем документе.
Как было указано ранее, выталкиватель (24) скобок включает в себя отверстие (26) для троакара. Отверстие (26) для троакара выполнено с возможностью обеспечения скольжения троакара (38) продольно относительно узла (20) сшивающей головки и/или узла (60) ствола. Как показано на ФИГ. 2A–2C, троакар (38) присоединен к активатору (39) троакара так, что троакар (38) может быть приведен в действие продольно посредством вращения вращательной ручки (98), как это будет описано более подробно ниже со ссылкой на узел (70) рукоятки активатора. В настоящем примере активатор (39) троакара содержит удлиненный, относительно жесткий ствол, соединенный с троакаром (38), хотя это является необязательным. В некоторых вариантах активатор (39) может содержать материал, жесткий в продольном направлении, позволяющий при этом сгибание в боковых направлениях, так что во время применения участки инструмента (10) могут избирательно сгибаться или изгибаться; или инструмент (10) может включать в себя узел (60) ствола, выполненный с предварительным сгибом. Когда упор (40) соединен с троакаром (38), троакар (38) и упор (40) имеют возможность поступательного перемещения посредством активатора (39) для регулировки расстояния зазора d между упором (40) и узлом (20) сшивающей головки. Обычному специалисту в данной области в контексте идей, представленных в настоящем документе, будут понятны дополнительные конфигурации активатора (39) для приведения в действие троакара (38) продольно.
C. Пример узла ствола
Узел (20) сшивающей головки и троакар (38) расположены в дистальном конце узла (60) ствола, как показано на ФИГ. 2A–2C. Узел (60) ствола настоящего примера содержит внешний трубчатый элемент (62) и активатор (64) выталкивателя. Внешний трубчатый элемент (62) соединен с трубчатым корпусом (22) узла (20) сшивающей головки и корпусом (72) узла (70) рукоятки активатора, обеспечивая таким образом механическую основу для активации в нем компонентов. Проксимальный конец активатора (64) выталкивателя соединен с узлом (84) активации спускового механизма узла (70) рукоятки активатора, описанного ниже. Дистальный конец активатора (64) выталкивателя соединен с выталкивателем (24) скобок так, что вращение спускового механизма (74) продольно приводит в действие выталкиватель (24) скобок. Как показано на ФИГ. 2A–2C, активатор (64) выталкивателя содержит трубчатый элемент, имеющий открытую продольную ось, так что активатор (39), соединенный с троакаром (38), может быть приведен в действие продольно внутри и относительно активатора (64) выталкивателя. Конечно, следует понимать, что внутри активатора (64) выталкивателя можно разместить другие компоненты, как будет понятно обычному специалисту в данной области в контексте идей, представленных в настоящем документе.
Узел (60) ствола может быть дополнительно сконструирован в соответствии с, по меньшей мере, некоторыми из идей патента США № 5,205,459; патента США № 5,271,544; патента США № 5,275,322; патента США № 5,285,945; патента США № 5,292,053; патента США № 5,333,773; патента США № 5,350,104; патента США № 5,533,661; и/или патентной публикации США № 2012/0292372, описания которых включены в настоящий документ путем ссылки; и/или в соответствии с другими конфигурациями, которые будут очевидны обычному специалисту в данной области в контексте идей, представленных в настоящем документе.
D. Пример узла рукоятки активатора
Как показано на ФИГ. 4A–5, узел (70) рукоятки активатора содержит корпус (72), спусковой механизм (74), блокирующий элемент (82), узел (84) активации спускового механизма и узел (90) активации троакара. Спусковой механизм (74) настоящего примера поворотно установлен на корпусе (72) и соединен с узлом (84) активации спускового механизма так, что вращение спускового механизма (74) из неактивированного положения (показано на ФИГ. 4A) в активированное положение (показано на ФИГ. 4B) приводит в действие активатор (64) выталкивателя, описанный выше. Пружина (78) соединена с корпусом (72) и спусковым механизмом (74) для смещения спускового механизма (74) к неактивированному положению. Блокирующий элемент (82) представляет собой элемент, выполненный с возможностью поворота, который соединен с корпусом (72). В первом, заблокированном положении блокирующий элемент (82) поворачивается вверх и в сторону от корпуса (72) так, что блокирующий элемент (82) входит в зацепление со спусковым механизмом (74) и механически сопротивляется приведению в действие спускового механизма (74) пользователем. Во втором, незаблокированном положении, как это показано на ФИГ. 1 и 4B, блокирующий элемент (82) повернут вниз так, что спусковой механизм (74) может быть приведен пользователем в действие. Соответственно, с блокирующим элементом (82) во втором положении спусковой механизм (74) может входить в зацепление с узлом (84) активации спускового механизма для активации инструмента (10).
Как показано на ФИГ. 4A–4B, узел (84) активации спускового механизма настоящего примера содержит скользящую каретку (86) спускового механизма, находящуюся в зацеплении с проксимальным концом активатора (64) выталкивателя. Каретка (86) включает в себя набор язычков (88) на проксимальном конце каретки (86) для удержания пары плеч (76) спускового механизма, проходящих из спускового механизма (74), и зацепления с ними. Соответственно, когда спусковой механизм (74) повернут, каретка (86) приводится в действие продольно и передает продольное перемещение активатору (64) выталкивателя. В показанном примере каретка (86) жестко соединена с проксимальным концом активатора (64) выталкивателя, хотя это и является необязательным. Фактически в одном приводимом лишь в качестве примера альтернативном варианте каретка (86) может просто упираться в активатор (64) выталкивателя, тогда как дистальная пружина (не показана) смещает активатор (64) выталкивателя проксимально относительно узла (70) рукоятки активатора.
Узел (84) активации спускового механизма дополнительно может быть сконструирован в соответствии с, по меньшей мере, некоторыми из идей патента США № 5,205,459; патента США № 5,271,544; патента США № 5,275,322; патента США № 5,285,945; патента США № 5,292,053; патента США № 5,333,773; патента США № 5,350,104; патента США № 5,533,661; и/или патентной публикации США № 2012/0292372, описания которых включены в настоящий документ путем ссылки; и/или в соответствии с другими конфигурациями, которые будут очевидны обычному специалисту в данной области в контексте идей, представленных в настоящем документе.
Корпус (72) также вмещает узел (90) активации троакара, выполненный с возможностью приведения в действие троакара (38) продольно в ответ на вращение регулировочной ручки (98). Как лучше всего показано на ФИГ. 4A–5, узел (90) активации троакара настоящего примера содержит регулировочную ручку (98), желобчатый хвостовик (94) и гильзу (92). Желобчатый хвостовик (94) настоящего примера размещен на проксимальном конце активатора (39) троакара, хотя следует понимать, что желобчатый хвостовик (94) и активатор (39) троакара могут альтернативно представлять собой отдельные компоненты, которые входят в зацепление для передачи продольного перемещения. Хотя желобчатый хвостовик (94) выполнен с возможностью поступательного перемещения внутри корпуса (72), желобчатый хвостовик (94) не вращается внутри корпуса (72). Регулировочная ручка (98) поддерживается с возможностью вращения проксимальным концом корпуса (72) и выполнена с возможностью вращения гильзы (92), которая входит в зацепление с желобчатым хвостовиком (94) посредством внутреннего язычка (не показан). Регулировочная ручка (98) также формирует внутреннюю резьбу (не показана), которая будет описана ниже более подробно. Желобчатый хвостовик (94) настоящего примера содержит непрерывный желоб (96), образованный на наружной поверхности желобчатого хвостовика (94). Таким образом, при вращении регулировочной ручки (98) внутренний язычок гильзы (92) двигается внутри желоба (96), а желобчатый хвостовик (94) приводится в действие продольно относительно гильзы (92). Так как желобчатый хвостовик (94) размещен на проксимальном конце активатора (39) троакара, вращение регулировочной ручки (98) в первом направлении выдвигает активатор (39) троакара дистально относительно узла (70) рукоятки активатора. Соответственно, расстояние зазора d между упором (40) и узлом (20) сшивающей головки увеличивается. При вращении регулировочной ручки (98) в противоположном направлении активатор (39) троакара приводится в действие проксимально относительно узла (70) рукоятки активатора для уменьшения расстояния зазора d между упором (40) и узлом (20) сшивающей головки. Таким образом, узел (90) активации троакара выполнен с возможностью приведения в действие троакара (38) в ответ на вращения регулировочной ручки (98). Конечно, обычному специалисту в данной области будут очевидны и другие конфигурации узла (90) активации троакара в контексте идей, представленных в настоящем документе.
Желоб (96) настоящего примера содержит множество различных участков (96A, 96B, 96C), которые имеют разный шаг или число желобов на единицу осевого расстояния Настоящий желоб (96) разделен на дистальный участок (96A), средний участок (96B) и проксимальный участок (96C). Как показано на ФИГ. 5, дистальный участок (96А) имеет малый шаг, или большое число желобов на коротком осевом расстоянии желобчатого хвостовика (94). Средний участок (96B) содержит часть со сравнительно более крупным шагом, или меньшим числом желобов на осевой длине, так что для прохождения длинного осевого расстояния внутреннему язычку гильзы (92) необходимо относительно небольшое число поворотов. Когда упор (40) находится в исходном дистальном положении по отношению к узлу (20) сшивающей головки, внутренний язычок гильзы (92) расположен в среднем участке (96B). Соответственно, расстояние зазора d может быстро уменьшаться при сравнительно небольшом количестве вращений регулировочной ручки (98), когда внутренний язычок гильзы (92) проходит по среднему участку (96B). Проксимальный участок (96C) настоящего примера по существу аналогичен дистальному участку (96A) и содержит малый шаг, или большое число желобов на коротком осевом расстоянии желобчатого хвостовика (94), так что требуется большое число поворотов для прохождения малого осевого расстояния. Проксимальный участок (96C) настоящего примера находится в зацеплении с внутренней резьбой, образованной ручкой (98), когда упор (40) находится по существу рядом с узлом (20) сшивающей головки, так что планка (110) индикатора перемещается внутри окошка (120) индикатора вдоль шкалы (130) для указания на то, что зазор упора находится в пределах желательного диапазона эксплуатации, как более подробно описано ниже. Соответственно, когда желобчатый хвостовик (94) достигает проксимального положения, в котором проксимальный участок (96C) желоба (96) находится в зацеплении с внутренней резьбой ручки (98), каждое вращение регулировочной ручки (98) может уменьшать расстояние зазора d на относительно небольшую величину, обеспечивая точную подстройку. Следует понимать, что внутренний язычок гильзы (92) может высвобождаться из желоба (96), когда проксимальный участок (96C) входит в зацепление с внутренней резьбой ручки (98).
Узел (90) активации троакара дополнительно может быть сконструирован в соответствии с, по меньшей мере некоторыми, из идей патента США № 5,205,459; патента США № 5,271,544; патента США № 5,275,322; патента США № 5,285,945; патента США № 5,292,053; патента США № 5,333,773; патента США № 5,350,104; патента США № 5,533,661, содержание которых полностью включено в настоящий документ путем ссылки; и/или в соответствии с другими конфигурациями, которые будут очевидны обычному специалисту в данной области в контексте идей, представленных в настоящем документе.
В примере, показанном на ФИГ. 4A–4B, U-образный зажим (100) прикреплен к промежуточному участку активатора (39) троакара, размещенному дистально от желобчатого хвостовика (94). В настоящем примере удлиненный конец активатора (39) троакара входит в зацепление с пазом в корпусе узла (70) рукоятки, чтобы предотвращать вращение активатора (39) троакара вокруг своей оси при вращении регулировочной ручки (98). U-образный зажим (100) настоящего примера дополнительно включает в себя удлиненный паз (102) на каждой из своих противоположных сторон для приема крепежного элемента, такого как шуруп, винт, штифт и т. д., для избирательной регулировки продольного положения удлиненного паза (102) U-образного зажима (100) относительно активатора (39) троакара для целей калибровки планки (110) индикатора относительно шкалы (130). В некоторых других вариантах крепежный элемент (например, шуруп, винт, штифт и т. п.) входит в зацепление с участком корпуса (72), по существу предотвращая вращение активатора (39) троакара вокруг своей оси при вращении регулировочной ручки (98).
Как показано на ФИГ. 5, узел (70) рукоятки активатора дополнительно включает скобу (140) индикатора, выполненную с возможностью зацепления и поворота индикатора (104). Скоба (140) индикатора настоящего примера выполнена с возможностью скольжения относительно корпуса (72) вдоль пары пазов, образованных на корпусе (72). Скоба (140) индикатора содержит прямоугольную пластину (144), плечо (146) индикатора и наклоненный фланец (142). Наклоненный фланец (142) образован на проксимальном конце прямоугольной пластины (144) и включает в себя отверстие (не показано) для установки с возможностью скольжения на активаторе (39) троакара и/или желобчатом хвостовике (94). Спиральная пружина (150) расположена между фланцем (142) и ступицей (152) для смещения фланца (142) к U-образному зажиму (100). Соответственно, когда U-образный зажим (100) приводится в действие активатором (39) троакара и/или желобчатым хвостовиком (94) дистально, спиральная пружина (150) подталкивает скобу (140) индикатора, чтобы она двигалась дистально с U-образным зажимом (100). Кроме того, U-образный зажим (100) подталкивает скобу (140) индикатора проксимально относительно ступицы (152), когда активатор (39) троакара и/или желобчатый хвостовик (94) поступательно перемещается проксимально, таким образом сжимая спиральную пружину (150). Конечно, следует понимать, что в некоторых вариантах скобу (140) индикатора можно жестко прикрепить к активатору (39) троакара и/или желобчатому хвостовику (94).
В настоящем примере участок блокирующего элемента (82) упирается в поверхность (141) скобы (140) индикатора, когда скоба (140) индикатора находится в продольном положении, которое не соответствует моменту, когда зазор упора находится в пределах желательного диапазона эксплуатации (например, в области зеленого цвета, или в «зеленой зоне»). Когда зазор упора находится в пределах желательного диапазона эксплуатации (например, в области зеленого цвета, или в «зеленой зоне»), скоба (140) индикатора сужается, обеспечивая пару зазоров (145) с каждой стороны плеча (146) индикатора, что допускает поворот блокирующего элемента (82), таким образом высвобождая спусковой механизм (74). Соответственно, блокирующий элемент (82) и скоба (140) индикатора могут по существу предотвращать высвобождение и эксплуатацию спускового механизма (74) пользователем до тех пор, пока упор (40) не будет находиться в пределах предварительно заданного диапазона эксплуатации. Конечно, следует понимать, что в некоторых вариантах блокирующий элемент (82) может полностью отсутствовать.
Информация об этом диапазоне эксплуатации может визуально передаваться пользователю посредством планки (110) индикатора (104), показанной вплотную к шкале (130), вкратце описанной выше. На дистальном конце скобы (140) индикатора находится дистально выступающее плечо (146) индикатора, которое заканчивается у выступающего в боковом направлении пальца (148) для управления перемещением индикатора (104). Плечо (146) индикатора и палец (148), как лучше всего показано на ФИГ. 5, выполнены с возможностью вхождения в зацепление с язычком (106) индикатора (104) так, что индикатор (104) поворачивается при приведении в действие скобы (140) индикатора продольно. В настоящем примере индикатор (104) соединен с возможностью поворота с корпусом (72) на первом конце индикатора (104), хотя это является необязательным, а другие точки поворота индикатора (104) будут очевидны обычному специалисту в данной области в контексте идей, представленных в настоящем документе. Планка (110) индикатора расположена на втором конце индикатора (104) так, что планка (110) индикатора перемещается в ответ на приведение в действие скобы (140) индикатора. Соответственно, как описано выше, планка (110) индикатора отображается через окошко (120) индикатора вплотную к шкале (130) (показана на ФИГ. 6), показывая относительное расстояние зазора d между упором (40) и узлом (20) сшивающей головки.
Конечно, скоба (140) индикатора, индикатор (104) и/или узел (70) рукоятки активатора дополнительно могут быть сконструированы в соответствии с, по меньшей мере, некоторыми из идей патента США № 5,205,459; патента США № 5,271,544; патента США № 5,275,322; патента США № 5,285,945; патента США № 5,292,053; патента США № 5,333,773; патента США № 5,350,104; патента США № 5,533,661; и/или патентной публикации США № 2012/0292372, описания которых включены в настоящий документ путем ссылки; и/или в соответствии с другими конфигурациями, которые будут очевидны обычному специалисту в данной области в контексте идей, представленных в настоящем документе.
II. Пример кругового хирургического сшивающего инструмента с электроприводом с поступательно перемещающимся кулачковым следящим элементом
В некоторых вариантах осуществления может быть желательно двигать скобки (66) и скальпель (36) таким образом, чтобы избегать ручного приведения в движение кругового хирургического сшивающего инструмента (10). Например, в том случае, если силы руки оператора недостаточно для приведения в действие кругового хирургического сшивающего инструмента (10), может быть желательно наличие узла с электроприводом для выталкивателя скобок (24) и скальпеля (36). Оснащение двигателем, по меньшей мере, части инструмента (10) также может снизить риск ошибки оператора при движении выталкивателя (24) скобок и скальпеля (36). В некоторых случаях ошибка оператора при работе с активируемым вручную инструментом (10) может привести к тому, что инструмент (10) не приводится в действие полностью. Это может произойти, если оператору не удастся полностью привести в действие рукой спусковой механизм (74), в результате чего скобки (66) не смогут полностью сформироваться и, следовательно, полностью сшить анастомоз. Таким образом, использование двигателя для приведения в движение выталкивателя (24) скобок и скальпеля (36) может гарантировать, что за один рабочий такт скальпель (36) будет полностью выдвинут и разрежет ткань, и скобки (66) будут полностью размещены и скрепят ткань. Ниже более подробно рассмотрены различные примеры того, как можно изменить конфигурацию инструмента (10), чтобы встроить в него двигатель; в то время как другие примеры будут очевидны обычным специалистам в данной области в соответствии с изложенными в настоящем документе идеями. Следует понимать, что описанные ниже примеры могут функционировать по существу так же, как инструмент (10), описанный выше. В частности, круговые хирургические сшивающие инструменты, описанные ниже, можно использовать для сшивания ткани кольцевым набором скобок и отрезания излишков ткани внутри кольцевого набора скобок с обеспечением по существу плавного перехода между частями просвета.
Хотя может быть желательно оснастить двигателем, по меньшей мере, часть кругового хирургического сшивающего инструмента (10), не обязательно может быть желательно оснастить двигателем все участки кругового хирургического сшивающего инструмента (10). Например, может быть желательно сохранить ручную регулировку ручки (98) или аналогичного элемента для контроля расстояния d между упором (40) и узлом (20) сшивающей головки. Обычному специалисту в данной области в контексте представленных в настоящем документе идей будет очевидно, что в других подходящих деталях кругового хирургического сшивающего инструмента (10), несмотря на использование двигателя, также может использоваться ручное приведение в действие.
Один приводимый лишь в качестве примера вариант кругового хирургического сшивающего инструмента (200) с электроприводом показан на ФИГ. 7. Инструмент (200) настоящего примера содержит закрывающую систему и пусковую систему. Закрывающая система настоящего примера содержит вращательную ручку (298), выполненную с возможностью приведения в движение упора (240). Закрывающая система и вращательная ручка (298) настоящего примера функционируют по существу сходным образом с закрывающей системой и ручкой (98) инструмента (10), описанного выше. В частности, вращательную ручку (298) закрывающей системы настоящего примера можно вращать для приведения в действие активатора (239) троакара продольно с целью увеличения или уменьшения расстояния зазора между проксимальной поверхностью упора (240) и дистальной поверхностью узла (218) сшивающей головки.
Пусковая система настоящего примера функционирует по существу сходным образом с пусковой системой инструмента (10), описанного выше, за исключением описанных ниже отличий. В частности, пусковая система настоящего примера может использоваться для приведения в действие выталкивателя скобок (не показан). Пусковая система настоящего примера содержит двигатель (210), корпус (284) кулачкового следящего элемента, активатор (264) выталкивателя и выталкиватель скобок. Как будет описано ниже более подробно, двигатель (210) выполнен с возможностью приведения в действие выталкивателя скобок. Активатор (264) выталкивателя настоящего примера выполнен с возможностью работы по существу сходным образом с активатором (64) выталкивателя инструмента (10), описанного выше. В частности, дистальный конец активатора (264) выталкивателя соединен с выталкивателем скобок так, что приведение в действие двигателя (210) поступательно перемещает активатор (264) выталкивателя продольно, а он, в свою очередь, продольно приводит в действие выталкиватель скобок. Выталкиватель скобок включает в себя множество элементов выталкивания скобок, множество скобок и скальпель, выполненный с возможностью рассечения ткани при приведении в действие выталкивателя скобок продольно. Выталкиватель скобок настоящего примера функционирует по существу сходным образом с выталкивателем (24) скобок инструмента (10), описанным выше, за исключением описанных ниже отличий. В частности, выталкиватель скобок настоящего примера можно использовать для выталкивания кольцевого набора скобок в ткань и приведения в движение скальпеля (не показан) с отсечением излишков ткани внутри кольцевого набора скобок с целью обеспечения по существу плавного перехода между участками просвета в ответ на приведение в действие выталкивателя скобок, подобно тому, как показано на ФИГ. 2C.
Как показано на ФИГ. 8, корпус (284) кулачкового следящего элемента содержит пару продольных выступов (286A, 286B), расположенных на противоположных сторонах корпуса (284) кулачкового следящего элемента. Выступы (286A, 286B) расположены с возможностью скольжения внутри пары пазов (не показаны), образованных во внутренней поверхности узла (270) рукоятки активатора. Как видно лучше всего на ФИГ. 9, проксимальный конец активатора (264) выталкивателя содержит радиальный штифт (265), проходящий от наружной поверхности активатора (264) выталкивателя. Дистальный конец корпуса (284) кулачкового следящего элемента представляет собой байонетный паз (288) выполненный с возможностью приема радиального штифта (265) активатора (264) выталкивателя так, что корпус (284) кулачкового следящего элемента и активатор (264) выталкивателя могут быть соединены вместе, и так, что продольное поступательное перемещение корпуса (284) кулачкового следящего элемента вызывает продольное поступательное перемещение активатора (264) выталкивателя. Дистальный конец активатора (264) выталкивателя соединен с выталкивателем скобок так, что продольное поступательное перемещение корпуса (284) кулачкового следящего элемента приводит в действие выталкиватель скобок. Как будет описано ниже более подробно, двигатель (210) выполнен с возможностью вызывать продольное поступательное перемещение корпуса (284) кулачкового следящего элемента посредством кулачкового узла. Таким образом, когда двигатель (210) приведен в действие и корпус (284) кулачкового следящего элемента приводит в действие выталкиватель скобок посредством активатора (264) выталкивателя, скальпель и элементы выталкивания скобок по существу одновременно разрезают ткань и выталкивают скобки дистально в ткань.
Как показано на ФИГ. 7–8, активатор (239) троакара расположен с возможностью скольжения внутри продольного отверстия (285), образованного в корпусе (284) кулачкового следящего элемента так, что активатор (239) троакара может независимо поступательно перемещаться относительно корпуса (284) кулачкового следящего элемента, и наоборот. Это обеспечивает работу закрывающей системы независимо от пусковой системы.
Двигатель (210) соединен с устройством ввода (202) для оператора и источником (204) электропитания. Устройство ввода (202) для оператора может включать в себя приводимый в действие вручную спусковой механизм (например, сходный со спусковым механизмом (74), и т. п.) и/или какие-либо иные устройства ввода, выполненные с возможностью приведения в действие двигателя (210). Например, устройство ввода (202) для оператора может включать в себя кнопку, спусковой механизм, рычаг, ползунок, сенсорную панель и иное подобное устройство, которое электрическим способом активирует двигатель (210). В качестве дополнения или альтернативы, устройство ввода (202) для оператора может включать в себя приводимый в действие электрическим или программным способом активатор, которым оператор управляет для активации двигателя (210). В некоторых вариантах устройство ввода (202) для оператора может включать в себя активируемую ногой педаль, соединенную с двигателем (210). Другие подходящие формы такого устройства ввода (202) для оператора будут очевидны обычным специалистам в данной области в контексте идей, представленных в настоящем документе.
Также следует понимать, что устройство ввода (202) для оператора можно разместить в любом подходящем месте на круговом хирургическом сшивающем инструменте (10) или вблизи него, что будет очевидно обычному специалисту в данной области в контексте описанных в настоящем документе идей. Например, устройство ввода (202) для оператора можно расположить на любом участке узла (70) рукоятки активатора, как показано на ФИГ. 1. В альтернативном варианте осуществления устройство ввода (202) для оператора также можно расположить где-либо отдельно от кругового хирургического сшивающего инструмента (10), что может включать в себя размещение устройства ввода (202) для оператора на отдельном пульте или компьютере. Устройство ввода (202) для оператора также можно разместить на пульте или на устройстве, имеющем беспроводную связь с круговым хирургическим сшивающим инструментом (10). В контексте идей, представленных в настоящем документе, обычным специалистам в данной области будут очевидны другие подходящие местоположения устройства ввода (202) для оператора.
Источник (204) электропитания может иметь различные формы. Например, источник (204) электропитания может представлять собой внешний источник (например, сетевую розетку и т. п.), связанный с инструментом (10) посредством кабеля. Источник (204) электропитания может также включать в себя аккумулятор или аккумуляторную батарею (например, внутри инструмента (10)), выполненную с возможностью доставки энергии на узел (200) привода. Источник (204) электропитания в некоторых случаях может также обеспечивать энергией, индуцированной беспроводным образом, с возможностью электропитания узла (200) привода. Другие подходящие варианты источника (204) электропитания будут очевидны обычным специалистам в данной области в контексте идей, представленных в настоящем документе. Примеры компонентов и функциональных возможностей двигателя и кулачкового узла будут описаны ниже более подробно.
A. Первый пример двигателя и кулачкового узла
На ФИГ. 7–11E показаны примеры компонентов, встроенных в инструмент (200) для приведения в действие выталкивателя скобок и скальпеля. В частности, двигатель (210) располагается внутри узла (270) рукоятки активатора параллельно проксимальному участку активатора (264) выталкивателя. Цилиндрический кулачок (220) соединен с дистальным концом двигателя (210) посредством ствола (212). Приведение в действие двигателя (210) вызывает вращение цилиндрического кулачка (220) вокруг продольной оси (LA1), образованной двигателем (210). Следует понимать, что хотя двигатель (210) настоящего примера располагается внутри узла (270) рукоятки активатора, двигатель (210) может быть размещен снаружи от узла (270) рукоятки активатора. Например, двигатель (210) может быть размещен снаружи от узла (270) рукоятки активатора и соединен с кулачком (220) посредством гибкого приводного вала.
Как видно лучше всего на ФИГ. 10, цилиндрический кулачок (220) содержит губку (221), выступающую из наружной поверхности цилиндрического кулачка (220). Губка (221) содержит кольцевую наклонную дистальную поверхность (222). Наклонная дистальная поверхность (222) содержит дистальный участок (224) и проксимальный участок (226). Дистальный участок (224) и проксимальный участок (226) расположены на радиально противоположных сторонах цилиндрического кулачка (220). Дистальный участок (224) представляет собой участок наклонной дистальной поверхности (222), имеющий продольное положение относительно продольной оси (LA1) дистальнее положения проксимального участка (226). Наклонная дистальная поверхность (222) дополнительно содержит промежуточные участки (225, 227), расположенные между дистальным участком (224) и проксимальным участком (226). Промежуточные участки (225, 227) имеют контур, обеспечивающий по существу плавный переход между дистальным участком (224) и проксимальным участком (226) с противоположных сторон цилиндрического кулачка (220). Таким образом, относительно неподвижной точки в пространстве продольное положение наклонной дистальной поверхности (222) будет изменяться с проксимального положения, представленного проксимальным участком (226), на дистальное положение, представленное дистальным участком (224), и обратно при вращении цилиндрического кулачка (220) на один оборот.
Как показано на ФИГ. 10, губка (221) дополнительно содержит кольцевую наклонную проксимальную поверхность (232). Наклонная проксимальная поверхность (232) и наклонная дистальная поверхность (222) имеют параллельные контуры. Наклонная проксимальная поверхность (232) содержит дистальный участок (234) и проксимальный участок (236). Дистальный участок (234) и проксимальный участок (236) расположены на радиально противоположных сторонах цилиндрического кулачка (220). Дистальный участок (234) представляет собой участок наклонной проксимальной поверхности (232), имеющий продольное положение относительно продольной оси (LA1) дистальнее положения проксимального участка (236). Наклонная проксимальная поверхность (232) дополнительно содержит промежуточные участки (235, 237), расположенные между дистальным участком (234) и проксимальным участком (236). Промежуточные участки (235, 237) имеют контур, обеспечивающий по существу плавный переход между дистальным участком (234) и проксимальным участком (236) с противоположных сторон цилиндрического кулачка (220). Таким образом, следует понимать, что относительно неподвижной точки в пространстве продольное положение наклонной проксимальной поверхности (232) будет изменяться с проксимального положения, представленного проксимальным участком (236), на дистальное положение, представленное дистальным участком (234), и обратно при вращении цилиндрического кулачка (220) на один оборот.
Как показано на ФИГ. 9, корпус (284) кулачкового следящего элемента соединен со штифтом (289) и роликом (290). Штифт (289) соединен с нижней частью корпуса (284) кулачкового следящего элемента и проходит от нее так, что продольное поступательное перемещение штифта (289) вызывает продольное поступательное перемещение корпуса (284) кулачкового следящего элемента. Ролик (290) соединен с возможностью вращения со штифтом (289) так, что ролик (290) свободно вращается вокруг штифта (289). Как будет описано ниже более подробно, во время работы инструмента (200) ролик (290) находится в контакте с наклонной дистальной поверхностью (222). Как показано на ФИГ. 8–9, корпус (284) кулачкового следящего элемента дополнительно содержит плечо (287) кулачкового следящего элемента. Как будет также описано ниже более подробно, во время работы инструмента (200) плечо (287) кулачкового следящего элемента находится в контакте с наклонной проксимальной поверхностью (232). Таким образом, следует понимать, что губка (221) расположена с возможностью скольжения между роликом (290) и плечом (287) кулачкового следящего элемента. Контакт между плечом (287) кулачкового следящего элемента и наклонной проксимальной поверхностью (232) выполнен с возможностью воздействия на ролик (290), чтобы при вращении цилиндрического кулачка (220) он оставался в контакте с наклонной дистальной поверхностью (222). Таким образом, следует понимать, что при вращении цилиндрического кулачка (220) на один оборот продольное положение корпуса (284) кулачкового следящего элемента будет поступательно перемещаться с проксимального положения, обусловленного контактом между роликом (290) и проксимальным участком (226) наклонной дистальной поверхности (222), в дистальное положение, обусловленное контактом между роликом (290) и дистальным участком (224) наклонной дистальной поверхности (222), а затем обратно в проксимальное положение в результате контакта между плечом (287) кулачкового следящего элемента и проксимальным участком (236) наклонной проксимальной поверхности (232).
Например, как показано на ФИГ. 11A, ролик (290) находится в контакте с проксимальным участком (226) наклонной дистальной поверхности (222) цилиндрического кулачка (220). В этом положении корпус (284) кулачкового следящего элемента и активатор (264) выталкивателя находятся в проксимальном положении и, таким образом, выталкиватель скобок остается в проксимальном положении. Как показано на ФИГ. 11B, при вращении двигателем (210) цилиндрического кулачка (220) ролик (290) остается в контакте с наклонной дистальной поверхностью (222) и передает дистальное перемещение на корпус (284) кулачкового следящего элемента и активатор (264) выталкивателя. При вращении цилиндрического кулачка (220) в положение, показанное на ФИГ. 11B, ролик (290) перемещается через промежуточный участок (227) с проксимального участка (226) к дистальному участку (224). Как показано на ФИГ. 11C, ролик (290) находится в контакте с дистальным участком (224) наклонной дистальной поверхности (222) цилиндрического кулачка (220), когда вращение цилиндрического кулачка (220) достигает приблизительно 270°. В этом положении каждый элемент из корпуса (284) кулачкового следящего элемента и активатора (264) выталкивателя находится в дистальном положении и, таким образом, выталкиватель скобок приводится в движение в дистальное положение так, что множество элементов выталкивания скобок, кольцевой набор скобок и скальпель также приводятся в движение дистально. Как показано на ФИГ. 11D, при дополнительном вращении двигателем (210) цилиндрического кулачка (220) в том же направлении наклонная проксимальная поверхность (232) приводит в движение корпус (284) кулачкового следящего элемента и активатор (264) выталкивателя проксимально посредством плеча (287) кулачкового следящего элемента. При завершении цилиндрическим кулачком (220) вращения на 360° наклонная проксимальная поверхность (232) возвращает корпус (284) кулачкового следящего элемента и активатор (264) выталкивателя обратно в полностью проксимальное положение посредством плеча (287) кулачкового следящего элемента, как показано на ФИГ. 11E; и, таким образом, выталкиватель скобок и скальпель также возвращаются обратно в полностью проксимальное положение. Хотя полный оборот цилиндрического кулачка (220) на 360º распределяется как 270º для дистального перемещения активатора (264) выталкивателя и оставшиеся 90º для проксимального перемещения активатора выталкивателя, следует понимать, что распределение возможно установить в любом другом подходящем соотношении (например, 180º для дистального перемещения и 180º для проксимального перемещения и т. д.). Также следует понимать, что полный диапазон дистального и проксимального перемещения можно обеспечить посредством вращения цилиндрического кулачка (220) меньше чем на 360º.
В некоторых вариантах инструмента (200) упор (240) содержит разрушаемую прокладку, которая может быть разрушена скальпелем, когда скальпель завершит полный дистальный диапазон перемещения. В некоторых случаях прокладка обеспечивает слуховой или тактильный сигнал обратной связи через узел (270) рукоятки активатора при разрушении прокладки в ответ на завершение полного выдвигания скальпеля к упору (240), хотя такой слуховой/тактильный сигнал не является обязательным. Следует понимать, что наличие прокладки может представлять непредвиденное увеличение усилия, необходимого для выдвигания активатора (264) выталкивателя дистально. На ФИГ. 42 представлен пример профиля усилия, с которым сталкивается активатор (264) выталкивателя на протяжении диапазона дистального перемещения активатора (264) выталкивателя. На первом участке (1300) дистального перемещения активатор (264) выталкивателя встречается с постепенно возрастающей нагрузкой или усилием сопротивления по мере того, как скальпель продвигается через ткань. На втором участке (1310) дистального перемещения активатор (264) выталкивателя встречается с резко возрастающей нагрузкой или усилием сопротивления по мере того, как скальпель проходит через прокладку. На третьем участке (1320) дистального перемещения активатор (264) выталкивателя сначала встречается с быстрым падением нагрузки или усилия сопротивления после разрушения прокладки, а впоследствии с возрастанием нагрузки или усилия сопротивления по мере того, как узел (218) сшивающей головки толкает скобки в упор (240) и таким образом формирует скобки, придавая им конечную высоту. В свете вышеизложенного дополнительно следует понимать, что в процессе перемещения из положения, показанного на ФИГ. 11A, в положение, показанное на ФИГ. 11C, конфигурация наклонной дистальной поверхности (222) может обеспечить увеличение передаточного отношения при достижении активатором (264) выталкивателя конца своего дистального перемещения, таким образом обеспечивая большее усилие для разрушения прокладки. Например, скальпель может сталкиваться с прокладкой при перемещении скальпеля из положения, связанного с конфигурацией, показанной на ФИГ. 11B, в положение, связанное с конфигурацией, показанной на ФИГ. 11C; и наклонная дистальная поверхность (222) может обеспечить увеличение передаточного отношения при приближении скальпеля (236) к концу его дистального диапазона перемещения, обеспечивая тем самым большую дистальную движущую силу, посредством которой разрушается прокладка и формируются скобки. Конечно, в некоторых вариантах разрушаемая прокладка может полностью отсутствовать.
B. Второй пример двигателя и кулачкового узла
На ФИГ. 12 представлены примеры альтернативных компонентов, которые можно встроить в инструмент (200) для приведения в действие выталкивателя скобок и скальпеля. В частности, на ФИГ. 12 показан пример альтернативного двигателя (310) и цилиндрического кулачка (320), выполненных с возможностью работы по существу сходным образом с двигателем (210) и цилиндрическим кулачком (220), описанными выше, за исключением описанных ниже отличий. Двигатель (310) и цилиндрический кулачок (320) выполнены с возможностью приведения в движение выталкивателя скобок (не показан) дистально и проксимально на один оборот цилиндрического кулачка (320) посредством поступательного перемещения корпуса (384) кулачкового следящего элемента и активатора (364) выталкивателя. Корпус (384) кулачкового следящего элемента соединен с активатором (364) выталкивателя (например, посредством байонетного паза, образованного в корпусе (384) кулачкового следящего элемента и т. д.). Активатор (364) выталкивателя настоящего примера выполнен с возможностью работы по существу сходным образом с активатором (64) выталкивателя инструмента (10), описанного выше. В частности, дистальный конец активатора (364) выталкивателя соединен с выталкивателем скобок так, что активатор (364) выталкивателя приводит в действие выталкиватель скобок, когда двигатель (310) поступательно продольно перемещает активатор (364) выталкивателя.
Двигатель (310) располагается внутри узла рукоятки активатора (не показан) параллельно проксимальному участку активатора (364) выталкивателя. Цилиндрический кулачок (320) соединен с двигателем (310) посредством ствола (312). Приведение в действие двигателя (310) вызывает вращение ствола (312) и цилиндрического кулачка (320) вокруг продольной оси (LA2), образованной двигателем (310). Как видно лучше всего на ФИГ. 12, цилиндрический кулачок (320) содержит губку (321), выступающую из наружной поверхности цилиндрического кулачка (320). Губка (321) содержит кольцевую наклонную дистальную поверхность (322). Наклонная дистальная поверхность (322) содержит дистальный участок (324) и проксимальный участок (326). Дистальный участок (324) и проксимальный участок (326) расположены на радиально противоположных сторонах цилиндрического кулачка (320). Дистальный участок (324) представляет собой участок наклонной дистальной поверхности (322), имеющий продольное положение относительно продольной оси (LA2) дистальнее положения проксимального участка (326). Наклонная дистальная поверхность (322) дополнительно содержит промежуточные участки (325, 327), расположенные между дистальным участком (324) и проксимальным участком (326). Промежуточные участки (325, 327) имеют контур, обеспечивающий по существу плавный переход между дистальным участком (324) и проксимальным участком (326) с противоположных сторон цилиндрического кулачка (320). Таким образом, относительно неподвижной точки в пространстве продольное положение наклонной дистальной поверхности (322) будет изменяться с проксимального положения, представленного проксимальным участком (326), на дистальное положение, представленное дистальным участком (324), и обратно при вращении цилиндрического кулачка (320) на один оборот.
Губка (321) дополнительно содержит кольцевую наклонную проксимальную поверхность (332). Наклонная проксимальная поверхность (332) и наклонная дистальная поверхность (322) имеют параллельные контуры. Наклонная проксимальная поверхность (332) содержит дистальный участок (334) и проксимальный участок (336). Дистальный участок (334) и проксимальный участок (336) расположены на радиально противоположных сторонах цилиндрического кулачка (320). Дистальный участок (334) представляет собой участок наклонной проксимальной поверхности (332), имеющий продольное положение относительно продольной оси (LA2) дистальнее положения проксимального участка (336). Наклонная проксимальная поверхность (332) дополнительно содержит промежуточные участки (335, 337), расположенные между дистальным участком (334) и проксимальным участком (336). Промежуточные участки (335, 337) имеют контур, обеспечивающий по существу плавный переход между дистальным участком (334) и проксимальным участком (336) с противоположных сторон цилиндрического кулачка (320). Таким образом, относительно неподвижной точки в пространстве продольное положение наклонной проксимальной поверхности (332) будет изменяться с проксимального положения, представленного проксимальным участком (336), на дистальное положение, представленное дистальным участком (334), и обратно при вращении цилиндрического кулачка (320) на один оборот.
Корпус (384) кулачкового следящего элемента содержит плечо (386) и элемент (388) зацепления. Плечо (386) присоединено к нижней части корпуса (384) кулачкового следящего элемента и проходит от нее так, что продольное поступательное перемещение плеча (386) вызывает продольное поступательное перемещение корпуса (384) кулачкового следящего элемента. Элемент (388) зацепления соединен с плечом (386). Элемент (388) зацепления охватывает губку (321) и, таким образом, элемент (388) зацепления выполнен с возможностью оставаться в зацеплении с губкой (321) при вращении цилиндрического кулачка (320). Элемент (388) зацепления и плечо (386) могут содержать различные материалы. Например, элемент (388) зацепления может содержать более прочный материал, чтобы предотвратить износ от контакта с губкой (321). Кроме того, элемент (388) зацепления может содержать материал, выбранный для уменьшения трения между элементом (388) зацепления и губкой (321) цилиндрического кулачка (320). Различные виды материалов, которые можно использовать для обеспечения снижения трения между элементом (388) зацепления и губкой (321), будут очевидны обычным специалистам в данной области в контексте идей, представленных в настоящем документе.
При вращении цилиндрического кулачка (320) на один оборот продольное положение корпуса (384) кулачкового следящего элемента и активатора (364) выталкивателя будет поступательно перемещаться с проксимального положения в дистальное положение при завершении цилиндрическим кулачком (320) вращения на 270° в результате контакта между элементом (388) зацепления и дистальным участком (324) губки (321); и обратно в проксимальное положение, обусловленное контактом между элементом (388) зацепления и проксимальным участком (326) губки (321) при завершении цилиндрическим кулачком (320) вращения на 360°. Таким образом, следует понимать, что корпус (384) кулачкового следящего элемента, активатор (364) выталкивателя и выталкиватель скобок будут продольно поступательно перемещаться из проксимального положения в дистальное положение и обратно за один оборот цилиндрического кулачка (320). Это поступательное перемещение корпуса (384) кулачкового следящего элемента из проксимального положения в дистальное положение и обратно будет вызывать приведение в движение выталкивателя скобок и скальпеля дистально и проксимально посредством активатора (364) выталкивателя. Хотя полный оборот цилиндрического кулачка (320) на 360º распределяется как 270º для дистального перемещения активатора (364) выталкивателя и оставшиеся 90º для проксимального перемещения активатора выталкивателя, следует понимать, что распределение возможно установить в любом другом подходящем соотношении (например, 180º для дистального перемещения и 180º для проксимального перемещения и т. д.). Также следует понимать, что полный диапазон дистального и проксимального перемещения можно обеспечить посредством вращения цилиндрического кулачка (320) меньше чем на 360º.
Некоторые варианты инструмента (10) содержат разрушаемую прокладку, которая может быть разрушена скальпелем, когда скальпель завершит полный дистальный диапазон перемещения, как описывалось выше со ссылкой на ФИГ. 42. Следует также дополнительно понимать, что конфигурация наклонной дистальной поверхности (322) может обеспечить увеличение передаточного отношения при достижении скальпелем конца своего дистального перемещения, таким образом обеспечивая большее усилие для разрушения прокладки и формирования скобок. Однако несмотря на это в некоторых вариантах разрушаемая прокладка может полностью отсутствовать.
C. Третий пример двигателя и кулачкового узла
На ФИГ. 13 показаны другие примеры альтернативных компонентов, которые могут быть встроены в инструмент (200) для приведения в действие выталкивателя скобок и скальпеля. В частности, на ФИГ. 13 показан пример альтернативного двигателя (410) и цилиндрического кулачка (420), выполненных с возможностью работы по существу сходным образом с двигателем (210) и цилиндрическим кулачком (220), описанными выше, за исключением описанных ниже отличий. В частности, двигатель (410) и цилиндрический кулачок (420) выполнены с возможностью приведения в движение выталкивателя скобок (не показан) дистально и проксимально на один оборот цилиндрического кулачка (420) посредством поступательного перемещения корпуса (484) кулачкового следящего элемента и активатора (464) выталкивателя. Корпус (484) кулачкового следящего элемента соединен с активатором (464) выталкивателя (например, посредством байонетного паза, образованного в корпусе (484) кулачкового следящего элемента и т. д.). Активатор (464) выталкивателя настоящего примера выполнен с возможностью работы по существу сходным образом с активатором (64) выталкивателя инструмента (10), описанного выше. В частности, дистальный конец активатора (464) выталкивателя соединен с выталкивателем скобок так, что активатор (464) выталкивателя приводит в действие выталкиватель скобок, когда двигатель (410) поступательно продольно перемещает активатор (464) выталкивателя.
Двигатель (410) располагается внутри узла рукоятки активатора (не показан) параллельно проксимальному участку активатора (464) выталкивателя. Цилиндрический кулачок (420) соединен с двигателем (410) посредством ствола (412). Приведение в действие двигателя (410) вызывает вращение ствола (412) и цилиндрического кулачка (420) вокруг продольной оси (LA3), образованной двигателем (410). Цилиндрический кулачок (420) формирует кольцевой наклонный канал (422) в пределах наружной поверхности цилиндрического кулачка (420). Наклонный канал (422) содержит дистальный участок (424) и проксимальный участок (426). Дистальный участок (424) и проксимальный участок (426) расположены на радиально противоположных сторонах цилиндрического кулачка (420). Дистальный участок (424) представляет собой участок наклонного канала (422), имеющий продольное положение относительно продольной оси (LA3), дистальнее положения проксимального участка (426). Наклонный канал (422) дополнительно содержит промежуточные участки (425, 427), расположенные между дистальным участком (424) и проксимальным участком (426). Промежуточные участки (425, 427) имеют контур, обеспечивающий по существу плавный переход между дистальным участком (424) и проксимальным участком (426) с противоположных сторон цилиндрического кулачка (420). Таким образом, относительно неподвижной точки в пространстве продольное положение наклонного канала (422) будет изменяться с проксимального положения, представленного проксимальным участком (426), на дистальное положение, представленное дистальным участком (424), и обратно при вращении цилиндрического кулачка (420) на один оборот.
Корпус (484) кулачкового следящего элемента содержит плечо (486). Плечо (486) присоединено к корпусу (484) кулачкового следящего элемента так, что продольное поступательное перемещение плеча (486) вызывает продольное поступательное перемещение корпуса (484) кулачкового следящего элемента. Плечо (486) расположено с возможностью скольжения внутри наклонного канала (422) и выполнено с возможностью оставаться внутри наклонного канала (422) при вращении цилиндрического кулачка (420). Таким образом, следует понимать, что при вращении цилиндрического кулачка (420) на один оборот продольное положение корпуса (484) кулачкового следящего элемента и активатора (464) выталкивателя будет поступательно перемещаться с проксимального положения в дистальное положение при завершении цилиндрическим кулачком (420) вращения на 270° в результате контакта между элементом (488) зацепления и дистальным участком (424) наклонного канала (422); и обратно в проксимальное положение, обусловленное контактом между элементом (488) зацепления и проксимальным участком (426) наклонного канала (422) при завершении цилиндрическим кулачком (420) вращения на 360°. Корпус (484) кулачкового следящего элемента, активатор (464) выталкивателя и выталкиватель скобок будут, таким образом, продольно поступательно перемещаться из проксимального положения в дистальное положение и обратно за один оборот цилиндрического кулачка (420). Это поступательное перемещение корпуса (484) кулачкового следящего элемента из проксимального положения в дистальное положение и обратно будет вызывать приведение в движение выталкивателя скобок и скальпеля дистально и проксимально посредством активатора (464) выталкивателя. Хотя полный оборот цилиндрического кулачка (420) на 360º распределяется как 270º для дистального перемещения активатора (464) выталкивателя и оставшиеся 90º для проксимального перемещения активатора выталкивателя, следует понимать, что распределение возможно установить в любом другом подходящем соотношении (например, 180º для дистального перемещения и 180º для проксимального перемещения и т. д.). Также следует понимать, что полный диапазон дистального и проксимального перемещения можно обеспечить посредством вращения цилиндрического кулачка (420) меньше чем на 360º.
Некоторые варианты инструмента (10) содержат разрушаемую прокладку, которая может быть разрушена скальпелем, когда скальпель завершит полный дистальный диапазон перемещения, как описывалось выше со ссылкой на ФИГ. 42. Следует также дополнительно понимать, что конфигурация наклонного канала (422) может обеспечить увеличение передаточного отношения при достижении скальпелем конца своего дистального перемещения, таким образом обеспечивая большее усилие для разрушения прокладки и формирования скобок. Однако несмотря на это в некоторых вариантах разрушаемая прокладка может полностью отсутствовать.
D. Четвертый пример двигателя и кулачкового узла
На ФИГ. 14–17 показаны дополнительные примеры альтернативных компонентов, которые могут быть встроены в инструмент (200) для приведения в действие выталкивателя скобок и скальпеля. В частности, на ФИГ. 16A–16E показан двигатель (510), расположенный внутри узла (570) рукоятки активатора параллельно проксимальному участку активатора (564) выталкивателя. Как видно лучше всего на ФИГ. 14–15, кулачок (520) установлен на ствол (512) эксцентрически, проходя дистально от двигателя (510). Приведение в действие двигателя (510) вызывает вращение кулачка (520) вокруг продольной оси (LA4), образованной двигателем (510). Как будет описано ниже более подробно, кулачок (520) формирует канал (522) в наружной поверхности кулачка (520). Как видно лучше всего на ФИГ. 12–13, канал (522) содержит первый участок (524) и второй участок (526). Первый участок (524) и второй участок (526) расположены на радиально противоположных сторонах кулачка (520). Первый участок (524) представляет собой участок канала (522), имеющий большее радиальное расстояние от продольной оси (LA4), чем радиальное расстояние от продольной оси (LA4) до второго участка (526).
Канал (522) дополнительно содержит промежуточные участки (525, 527), расположенные между первым участком (524) и вторым участком (526). Промежуточные участки (525, 527) имеют контур, обеспечивающий по существу плавный переход между первым участком (524) и вторым участком (526) с противоположных сторон кулачка (520). Таким образом, следует понимать, что относительно неподвижной точки в пространстве радиальное расстояние от нижней части канала (522) до продольной оси (LA4) будет изменяться с меньшего радиального расстояния, представленного вторым участком (526), на большее радиальное расстояние, представленное первым участком (524), и обратно при вращении кулачка (520) на один оборот.
Как показано на ФИГ. 14 и 16A–16E, стыковочная деталь (584) следящего элемента соединена с поворотным кулачковым следящим элементом (590). Узел (570) рукоятки содержит шарнирный штифт (572), с которым кулачковый следящий элемент (590) соединен с возможностью вращения так, что кулачковый следящий элемент (590) может свободно вращаться вокруг шарнирного штифта (572). Первый участок (592) кулачкового следящего элемента (590) расположен с возможностью скольжения внутри канала (522). Свободный конец первого участка (592) кулачкового следящего элемента (590) формирует элемент (591) зацепления, выполненный с возможностью воздействия на первый участок (592), чтобы при вращении кулачка (520) он оставался внутри канала (522). На ФИГ. 17 показан пример варианта элемента (591) зацепления. В частности, на ФИГ. 17 показан кулачок (520), содержащий первый участок (520A) корпуса кулачка и второй участок (520B) корпуса кулачка. Между участками (520A, 520B) корпуса кулачка образован канал (522). Элемент (591) зацепления, таким образом, может быть захвачен внутри канала (522) при сборке первого и второго участков (520A, 520B) корпуса кулачка с образованием кулачка (520). Участок канала (522), образованный первым участком (520A) корпуса кулачка, формирует губку (523), выступающую в канал (522) и таким образом ограничивающую наружное отверстие (519) канала (522). Элемент (591) зацепления больше наружного отверстия (519) канала (522), и поэтому при вращении кулачка (520) он будет оставаться внутри канала (522).
Таким образом, при вращении кулачка (520) на один оборот радиальное расстояние от элемента (591) зацепления до продольной оси (LA4) будет изменяться с меньшего радиального расстояния, обусловленного вторым участком (526), на большее радиальное расстояние, обусловленное первым участком (524), и обратно. Это изменение радиального расстояния элемента (591) зацепления и, таким образом, свободного конца первого участка (592) кулачкового следящего элемента (590) будет вызывать вращение кулачкового следящего элемента (590) вокруг шарнирного штифта (572) из первого положения во второе положение и обратно. Как будет описано ниже более подробно, губка (523) дополнительно выполнена с возможностью приведения в движение элемента (591) зацепления внутри канала (522) так, что кулачковый следящий элемент (590) вращается против часовой стрелки вокруг шарнирного штифта (572), чтобы таким образом втягивать стыковочную деталь (584) следящего элемента, активатор (564) выталкивателя и выталкиватель скобок проксимально.
Второй участок (594) кулачкового следящего элемента (590) представляет собой паз (593). Стыковочная деталь (584) следящего элемента содержит штифт (589), проходящий в боковом направлении от стыковочной детали (584) следящего элемента. Штифт (589) размещен с возможностью скольжения и вращения внутри паза (593) так, что кулачковый следящий элемент (590) таким образом соединен со стыковочной деталью (584) следящего элемента, и дополнительно так, что когда кулачковый следящий элемент (590) вращается вокруг шарнирного штифта (572), стыковочная деталь (584) следящего элемента перемещается поступательно продольно. Стыковочная деталь (584) следящего элемента соединена с активатором (564) выталкивателя (например, посредством байонетного паза, образованного в стыковочной детали (584) следящего элемента и т. д.). Активатор (564) выталкивателя соединен с выталкивателем скобок и скальпелем так, что продольное поступательное перемещение стыковочной детали (584) следящего элемента приводит в действие выталкиватель скобок и скальпель. Таким образом, следует понимать, что при вращении кулачка (520) на первую часть полного оборота кулачковый следящий элемент (590) вращается по часовой стрелке из первого положения во второе положение, таким образом поступательно перемещая стыковочную деталь (584) следящего элемента дистально из первого продольного положения во второе продольное положение; и при вращении кулачка (520) на оставшуюся часть полного оборота кулачковый следящий элемент (590) вращается против часовой стрелки из второго положения обратно в первое положение, таким образом поступательно перемещая стыковочную деталь (584) следящего элемента проксимально из второго продольного положения обратно в первое продольное положение. Это поступательное перемещение стыковочной детали (584) следящего элемента из первого продольного положения во второе продольное положение и обратно будет вызывать приведение в движение выталкивателя скобок из проксимального положения в дистальное положение и обратно посредством активатора (564) выталкивателя.
На ФИГ. 16A показан элемент (591) зацепления кулачкового следящего элемента (590), находящийся в зацеплении со вторым участком (526) канала (522) кулачка (520). В этом положении кулачковый следящий элемент (590) находится в первом положении, а стыковочная деталь (584) следящего элемента находится в проксимальном положении и, таким образом, выталкиватель скобок остается в проксимальном положении. Как показано на ФИГ. 16B, при вращении двигателем (510) кулачка (520) элемент (591) зацепления остается в зацеплении с каналом (522), и при этом элемент (591) зацепления перемещается через промежуточный участок (525) из зацепления со вторым участком (526) канала (522) в зацепление с первым участком (524) канала (522). При перемещении элемента (591) зацепления от второго участка (526) к первому участку (524) кулачковый следящий элемент (590) вращается по часовой стрелке вокруг шарнирного штифта (572) от первого положения ко второму положению в результате контакта между элементом (591) зацепления и промежуточным участком (527). При вращении кулачкового следящего элемента (590) по часовой стрелке ко второму положению стыковочная деталь (584) следящего элемента и активатор (564) выталкивателя приводятся в движение дистально.
Как показано на ФИГ. 16C, после завершения кулачком (520) вращения на 180° элемент (591) зацепления входит в зацепление с первым участком (524) канала (522) кулачка (520). В этом положении кулачковый следящий элемент (590) повернут полностью во второе положение, и стыковочная деталь (584) следящего элемента и активатор (564) выталкивателя находятся в дистальном положении; и, таким образом, выталкиватель скобок приводится в движение в дистальное положение так, что множество элементов выталкивания скобок, кольцевой набор скобок и скальпель приводятся в движение дистально. Как показано на ФИГ. 16D, при продолжении дополнительного вращения кулачка (520) двигателем (510) в том же направлении элемент (591) зацепления остается в зацеплении с каналом (522) с помощью губки (523). При дополнительном вращении кулачка (520) элемент (591) зацепления перемещается через промежуточный участок (525) от первого участка (524) ко второму участку (526). При перемещении элемента (591) зацепления от первого участка (524) ко второму участку (526) кулачковый следящий элемент (590) вращается против часовой стрелки вокруг шарнирного штифта (572) от второго положения обратно к первому положению в результате контакта между элементом (591) зацепления и губкой (523). При вращении кулачкового следящего элемента (590) против часовой стрелки обратно к первому положению кулачковый следящий элемент (590) тянет стыковочную деталь (584) следящего элемента и активатор (564) выталкивателя проксимально. При дополнительном вращении кулачка (520) так, что кулачок (520) завершает вращение на 360°, элемент (591) зацепления перемещается через промежуточный участок (525) от первого участка (524) обратно ко второму участку (526) так, что стыковочная деталь (584) следящего элемента и активатор (564) выталкивателя возвращаются в проксимальное положение, как показано на ФИГ. 16E.
Как видно лучше всего на ФИГ. 15, промежуточный участок (525) и промежуточный участок (527) имеют разные контуры. Эти различные контуры представляют различные скорости изменения радиального расстояния от обращенной наружу кулачковой поверхности канала (522) до продольной оси (LA4), представленного расстоянием от первого участка (524) до второго участка (526), и наоборот. В частности, промежуточный участок (525) представляет более медленную скорость изменения от радиального расстояния, представленного вторым участком (526), к радиальному расстоянию, представленному первым участком (524), тогда как промежуточный участок (527) представляет более быструю скорость изменения от радиального расстояния, представленного первым участком (524), к радиальному расстоянию, представленному вторым участком (526), или наоборот, в зависимости от направления вращения кулачка (520). Следует понимать, что эти различные скорости изменения будут передаваться на стыковочную деталь (584) следящего элемента, активатор (564) выталкивателя и выталкиватель скобок посредством кулачкового следящего элемента (590), таким образом вызывая различные скорости продольного поступательного перемещения стыковочной детали (584) следящего элемента, активатора (564) выталкивателя и выталкивателя скобок. Например, промежуточный участок (525) может обеспечивать относительно невысокую скорость дистального выдвигания активатора (564) выталкивателя, в то время как промежуточный участок (527) обеспечивает относительно высокую скорость проксимального втягивания активатора (564) выталкивателя. Конечно, эти скорости можно дополнительно изменять любым подходящим способом.
Хотя полный оборот кулачка (520) на 360º распределяется как 180º для дистального перемещения активатора (564) выталкивателя и оставшиеся 180º для проксимального перемещения активатора выталкивателя, следует понимать, что распределение возможно установить в любом другом подходящем соотношении (например, 270º для дистального перемещения и 90º для проксимального перемещения и т. д.). Следует также понимать, что полный диапазон дистального и проксимального перемещения можно обеспечить посредством вращения кулачка (520) меньше чем на 360°.
Некоторые варианты инструмента (10) содержат разрушаемую прокладку, которая может быть разрушена скальпелем, когда скальпель завершит полный дистальный диапазон перемещения, как описывалось выше со ссылкой на ФИГ. 42. Следует также дополнительно понимать, что конфигурация канала (522) может обеспечить увеличение передаточного отношения при достижении скальпелем конца своего дистального перемещения, таким образом обеспечивая большее усилие для разрушения прокладки и формирования скобок. Однако несмотря на это в некоторых вариантах разрушаемая прокладка может полностью отсутствовать.
E. Пятый пример альтернативного двигателя и кулачкового узла
На ФИГ. 18–20 показаны дополнительные примеры альтернативных компонентов, которые могут быть встроены в инструмент (200) для приведения в действие выталкивателя скобок и скальпеля. В частности, на ФИГ. 18–20 показан пример альтернативного двигателя (610) и кулачка (620), выполненных с возможностью работы по существу сходным образом с двигателем (510) и кулачком (520), описанными выше, за исключением описанных ниже отличий. Двигатель (610) и кулачок (620) выполнены с возможностью приведения в движение выталкивателя скобок (не показан) дистально и проксимально на один оборот кулачка (620) посредством поступательного перемещения активатора (664) выталкивателя и стыковочной детали (684) следящего элемента.
Как показано на ФИГ. 18, двигатель (610) располагается внутри узла рукоятки активатора (не показан) параллельно проксимальному участку активатора (664) выталкивателя. Кулачок (620) соединен с дистальным концом двигателя (610) посредством ствола (612). Приведение в действие двигателя (610) вызывает вращение кулачка (620) вокруг продольной оси (LA5), образованной двигателем (610). Как видно лучше всего на ФИГ. 17, канал (622) кулачка сформирован внутри дистальной поверхности (621) кулачка (620). Канал (622) кулачка расположен эксцентрически вокруг продольной оси (LA5). Канал (622) кулачка содержит первый участок (624) и второй участок (626). Первый участок (624) и второй участок (626) расположены на радиально противоположных сторонах канала (622) кулачка. Первый участок (624) представляет собой участок канала (622) кулачка, имеющий большее радиальное расстояние от продольной оси (LA5), чем радиальное расстояние от продольной оси (LA5) до второго участка (626).
Канал (622) кулачка дополнительно содержит промежуточные участки (625, 627), расположенные между первым участком (624) и вторым участком (626). Промежуточные участки (625, 627) имеют контур, обеспечивающий по существу плавный переход между первым участком (624) и вторым участком (626) с противоположных сторон канала (622) кулачка. Таким образом, относительно неподвижной точки в пространстве радиальное расстояние от нижней части канала (622) до продольной оси (LA5) будет изменяться с меньшего радиального расстояния, представленного вторым участком (626), на большее радиальное расстояние, представленное первым участком (624), и обратно при вращении кулачка (620) на один полный оборот.
Как показано на ФИГ. 18, стыковочная деталь (684) следящего элемента содержит поворотный кулачковый следящий элемент (690). Узел рукоятки содержит шарнирный штифт (672), с которым кулачковый следящий элемент (690) соединен с возможностью вращения так, что кулачковый следящий элемент (690) может свободно вращаться вокруг шарнирного штифта (672). Первый участок (692) кулачкового следящего элемента (690) расположен с возможностью скольжения внутри канала (622) кулачка. Свободный конец первого участка (692) кулачкового следящего элемента (690) формирует элемент (691) зацепления, выполненный с возможностью воздействия на первый участок (692), чтобы при вращении кулачка (620) он оставался внутри канала (622) кулачка. На ФИГ. 20 показан пример варианта элемента (691) зацепления. В частности, на ФИГ. 20 показан кулачок (620), содержащий первый участок (620A) корпуса кулачка и второй участок (620B) корпуса кулачка. Канал (622) кулачка образован между первым участком (620A) корпуса кулачка и вторым участком (620B) корпуса кулачка. Элемент (691) зацепления, таким образом, может быть захвачен внутри канала (622) кулачка при сборке первого участка (620A) корпуса кулачка и второго участка (620B) корпуса кулачка с образованием кулачка (620). Участок канала (622) кулачка, образованный первым участком (620A) корпуса кулачка, формирует губку (623), выступающую в канал (622) кулачка и таким образом ограничивающую наружное отверстие (619) канала (622) кулачка. Элемент (691) зацепления больше наружного отверстия (619) канала (622) кулачка, и поэтому при вращении кулачка (620) он будет оставаться внутри канала (622) кулачка.
Таким образом, при вращении кулачка (620) на один оборот радиальное расстояние от элемента (691) зацепления до продольной оси (LA5) будет изменяться с меньшего радиального расстояния, обусловленного вторым участком (626), на большее радиальное расстояние, обусловленное первым участком (624), и обратно. Это изменение радиального расстояния элемента (691) зацепления и, таким образом, проксимального конца первого участка (692) кулачкового следящего элемента (690) будет вызывать вращение кулачкового следящего элемента (690) вокруг шарнирного штифта (672) из первого положения во второе положение и обратно. Как будет описано ниже более подробно, губка (623) дополнительно выполнена с возможностью приведения в движение элемента (691) зацепления внутри канала (622) кулачка так, что кулачковый следящий элемент (690) вращается по часовой стрелке вокруг шарнирного штифта (672), чтобы таким образом приводить в движение стыковочную деталь (684) следящего элемента, активатор (664) выталкивателя и выталкиватель скобок дистально. Как будет также описано ниже более подробно, обращенная внутрь поверхность (629) канала (622) кулачка выполнена с возможностью приведения в движение элемента (691) зацепления внутри канала (622) кулачка так, что кулачковый следящий элемент (690) вращается против часовой стрелки вокруг шарнирного штифта (672), чтобы таким образом втягивать стыковочную деталь (684) следящего элемента, активатор (664) выталкивателя и выталкиватель скобок проксимально.
Второй участок (694) кулачкового следящего элемента (690) представляет собой паз (693). Стыковочная деталь (684) следящего элемента содержит штифт (689), проходящий в боковом направлении от стыковочной детали (684) следящего элемента. Штифт (689) размещен с возможностью скольжения и вращения внутри паза (693) так, что кулачковый следящий элемент (690) таким образом соединен со стыковочной деталью (684) следящего элемента, и дополнительно так, что когда кулачковый следящий элемент (690) вращается вокруг шарнирного штифта (672), стыковочная деталь (684) следящего элемента перемещается поступательно продольно. При вращении кулачка (620) на один оборот продольное положение стыковочной детали (684) следящего элемента и активатора (664) выталкивателя будет поступательно перемещаться с проксимального положения в дистальное положение при завершении кулачком (620) вращения на 180° в результате контакта между элементом (691) зацепления и губкой (623) на первом участке (624); и обратно в проксимальное положение, что вызвано контактом между элементом (691) зацепления и обращенной внутрь поверхностью (629) канала (622) кулачка на втором участке (626) при завершении кулачком (620) вращения на 360°. Таким образом, следует понимать, что при вращении кулачка (620) на первую часть полного оборота кулачковый следящий элемент (690) вращается по часовой стрелке из первого положения во второе положение, таким образом поступательно перемещая стыковочную деталь (684) следящего элемента дистально из первого продольного положения во второе продольное положение; и при вращении кулачка (620) на оставшуюся часть полного оборота кулачковый следящий элемент (690) вращается против часовой стрелки из второго положения обратно в первое положение, таким образом поступательно перемещая стыковочную деталь (684) следящего элемента проксимально из второго продольного положения обратно во второе продольное положение. Это поступательное перемещение стыковочной детали (684) следящего элемента из первого продольного положения во второе продольное положение и обратно будет вызывать приведение в движение выталкивателя скобок из проксимального положения в дистальное положение и обратно посредством активатора (664) выталкивателя.
Как видно лучше всего на ФИГ. 19, промежуточный участок (625) и промежуточный участок (627) имеют разные контуры. Эти различные контуры представляют различные скорости изменения радиального расстояния от канала (622) до продольной оси (LA5), представленного расстоянием от первого участка (624) до второго участка (626), и наоборот. В частности, промежуточный участок (625) представляет более медленную скорость изменения от радиального расстояния, представленного вторым участком (626), к радиальному расстоянию, представленному первым участком (624); тогда как промежуточный участок (627) представляет более быструю скорость изменения от радиального расстояния, представленного первым участком (624), к радиальному расстоянию, представленному вторым участком(626), или наоборот, в зависимости от того, в каком направлении вращается кулачок (620). Следует понимать, что эти различные скорости изменения будут передаваться на стыковочную деталь (684) следящего элемента, активатор (664) выталкивателя и выталкиватель скобок посредством кулачкового следящего элемента (690), таким образом вызывая различные скорости продольного поступательного перемещения стыковочной детали (684) следящего элемента, активатора (664) выталкивателя и выталкивателя скобок. Например, промежуточный участок (625) может обеспечивать относительно невысокую скорость дистального выдвигания активатора (664) выталкивателя, в то время как промежуточный участок (627) обеспечивает относительно высокую скорость проксимального втягивания активатора (664) выталкивателя. Конечно, эти скорости можно дополнительно изменять любым подходящим способом.
Хотя полный оборот кулачка (620) на 360º распределяется как 180º для дистального перемещения активатора (664) выталкивателя и оставшиеся 180º для проксимального перемещения активатора выталкивателя, следует понимать, что распределение возможно установить в любом другом подходящем соотношении (например, 270º для дистального перемещения и 90º для проксимального перемещения и т. д.). Также следует понимать, что полный диапазон дистального и проксимального перемещения можно обеспечить посредством вращения цилиндрического кулачка (620) меньше чем на 360º.
Некоторые варианты инструмента (10) содержат разрушаемую прокладку, которая может быть разрушена скальпелем, когда скальпель завершит полный дистальный диапазон перемещения, как описывалось выше со ссылкой на ФИГ. 42. Следует также дополнительно понимать, что конфигурация канала (622) может обеспечить увеличение передаточного отношения при достижении скальпелем конца своего дистального перемещения, таким образом обеспечивая большее усилие для разрушения прокладки и формирования скобок. Однако несмотря на это в некоторых вариантах разрушаемая прокладка может полностью отсутствовать.
F. Шестой пример альтернативного двигателя и кулачкового узла
На ФИГ. 21–23 еще показаны дополнительные примеры альтернативных компонентов, которые могут быть встроены в инструмент (200) для приведения в действие выталкивателя скобок и скальпеля. В частности, на ФИГ. 21–23 показан пример альтернативного двигателя (710) и кулачка (720), выполненных с возможностью работы по существу сходным образом с двигателем (510) и кулачком (520), описанными выше, за исключением описанных ниже отличий. Двигатель (710) и кулачок (720) выполнены с возможностью приведения в движение выталкивателя скобок (не показан) дистально и проксимально на один оборот кулачка (720) посредством поступательного перемещения активатора (764) выталкивателя и стыковочной детали (784) следящего элемента.
Как показано на ФИГ. 21, двигатель (710) располагается внутри узла рукоятки активатора (не показан) параллельно проксимальному участку активатора (764) выталкивателя. Кулачок (720) установлен на ствол (712) эксцентрически, проходя дистально от двигателя (710). Приведение в действие двигателя (710) вызывает вращение кулачка (720) вокруг продольной оси (LA6), образованной двигателем (710). Как видно лучше всего на ФИГ. 19, кулачковый выступ (722) проходит от дистальной поверхности (723) кулачка (720).
Кулачковый выступ (722) содержит первый участок (724) и второй участок (726). Первый участок (724) и второй участок (726) расположены на противоположных сторонах кулачкового выступа (722). Первый участок (724) представляет собой участок кулачкового выступа (722), имеющий большее радиальное расстояние от продольной оси (LA6), чем радиальное расстояние от продольной оси (LA6) до второго участка (726). Кулачковый выступ (722) дополнительно содержит промежуточные участки (725, 727), расположенные между первым участком (724) и вторым участком (726). Промежуточные участки (725, 727) имеют контур, обеспечивающий по существу плавный переход между первым участком (724) и вторым участком (726) с противоположных сторон кулачкового выступа (722). Таким образом, следует понимать, что относительно неподвижной точки в пространстве радиальное расстояние от выступа (722) до продольной оси (LA6) будет изменяться с меньшего радиального расстояния, представленного вторым участком (726), на большее радиальное расстояние, представленное первым участком (724), и обратно при вращении кулачка (720) на один оборот.
Как показано на ФИГ. 21, стыковочная деталь (784) следящего элемента содержит поворотный кулачковый следящий элемент (790). Узел рукоятки содержит шарнирный штифт (772), с которым кулачковый следящий элемент (790) соединен с возможностью вращения так, что кулачковый следящий элемент (790) может свободно вращаться вокруг шарнирного штифта (772). Первый участок (792) кулачкового следящего элемента (790) входит в зацепление с кулачковым выступом (722) с возможностью скольжения. Свободный конец первого участка (792) кулачкового следящего элемента (790) формирует элемент (791) зацепления, выполненный с возможностью воздействия на первый участок (792), чтобы при вращении кулачка (720) он оставался в зацеплении с кулачковым выступом (722). На ФИГ. 23 показан пример варианта элемента (791) зацепления. В частности, на ФИГ. 23 показан кулачковый выступ (722), содержащий губку (721), выступающую внутрь от кулачкового выступа (722). Элемент (791) зацепления выполнен с возможностью соединения вокруг губки (721) и наружной поверхности кулачкового выступа (722) так, что при вращении кулачка (720) элемент (791) зацепления будет оставаться соединенным с кулачковым выступом (722). В частности, элемент (791) зацепления содержит первый палец (795A), расположенный за пределами кулачкового выступа (722), и второй палец (795B), расположенный внутри кулачкового выступа (722). Таким образом, следует понимать, что при вращении кулачка (720) на один оборот радиальное расстояние от элемента (791) зацепления до продольной оси (LA6) будет изменяться с меньшего радиального расстояния, обусловленного вторым участком (726), на большее радиальное расстояние, обусловленное первым участком (724), и обратно. Это изменение радиального расстояния элемента (791) зацепления и, таким образом, проксимального конца первого участка (792) кулачкового следящего элемента (790) будет вызывать вращение кулачкового следящего элемента (790) вокруг шарнирного штифта (772) из первого положения во второе положение и обратно.
Как будет описано ниже более подробно, первый палец (795A) выполнен с возможностью приведения в движение элемента (791) зацепления так, что кулачковый следящий элемент (790) вращается по часовой стрелке вокруг шарнирного штифта (772), чтобы таким образом приводить в движение стыковочную деталь (784) следящего элемента, активатор (764) выталкивателя и выталкиватель скобок дистально. Как будет также описано ниже более подробно, второй палец (795B) выполнен с возможностью приведения в движение элемента (791) зацепления так, что кулачковый следящий элемент (790) вращается против часовой стрелки вокруг шарнирного штифта (772), чтобы таким образом втягивать стыковочную деталь (784) следящего элемента, активатор (764) выталкивателя и выталкиватель скобок проксимально.
Второй участок (794) кулачкового следящего элемента (790) формирует паз (793). Стыковочная деталь (784) следящего элемента содержит штифт (789), проходящий в боковом направлении от стыковочной детали (784) следящего элемента. Штифт (789) размещен с возможностью скольжения и вращения внутри паза (793) так, что кулачковый следящий элемент (790) соединен со стыковочной деталью (784) следящего элемента, и дополнительно так, что когда кулачковый следящий элемент (790) вращается вокруг шарнирного штифта (772), стыковочная деталь (784) следящего элемента поступательно перемещается продольно. При вращении кулачка (720) на один оборот продольное положение стыковочной детали (784) следящего элемента и активатора (764) выталкивателя будет поступательно перемещаться с проксимального положения в дистальное положение при завершении кулачком (720) вращения на 180° в результате контакта между первым пальцем (795A) элемента (791) зацепления и наружной поверхностью кулачкового выступа (772) на первом участке (724); и обратно в проксимальное положение, что вызвано контактом между вторым пальцем (795B) элемента (791) зацепления и внутренней поверхностью кулачкового выступа (772) на втором участке (726) при завершении кулачком (720) вращения на 360°. Таким образом, следует понимать, что при вращении кулачка (720) на один оборот кулачковый следящий элемент (790) вращается по часовой стрелке из первого положения во второе положение, а впоследствии вращается против часовой стрелки из второго положения в первое положение, таким образом поступательно перемещая стыковочную деталь (784) следящего элемента из первого продольного положения во второе продольное положение и обратно. Это поступательное перемещение стыковочной детали (784) следящего элемента из первого продольного положения во второе продольное положение и обратно будет вызывать приведение в движение выталкивателя скобок и скальпеля из проксимального положения в дистальное положение и обратно посредством активатора (764) выталкивателя. Стыковочная деталь (784) следящего элемента, активатор (764) выталкивателя и выталкиватель скобок будут, таким образом, продольно поступательно перемещаться из проксимального положения в дистальное положение и обратно за один оборот цилиндрического кулачка (720). Это поступательное перемещение стыковочной детали (784) следящего элемента из проксимального положения в дистальное положение и обратно будет вызывать приведение в движение выталкивателя скобок и скальпеля дистально и проксимально посредством активатора (764) выталкивателя.
Как видно лучше всего на ФИГ. 22, промежуточный участок (725) и промежуточный участок (727) имеют разные контуры. Эти различные контуры представляют различные скорости изменения радиального расстояния от кулачкового выступа (722) до продольной оси (LA6), представленного расстоянием от первого участка (724) до второго участка (726), и наоборот. В частности, промежуточный участок (725) представляет более медленную скорость изменения от радиального расстояния, представленного вторым участком (726), к радиальному расстоянию, представленному первым участком (724), тогда как промежуточный участок (727) представляет более быструю скорость изменения от радиального расстояния, представленного первым участком (724), к радиальному расстоянию, представленному вторым участком (726), или наоборот, в зависимости от того, в каком направлении вращается кулачок (720). Следует понимать, что эти различные скорости изменения будут передаваться на стыковочную деталь (784) следящего элемента, активатор (764) выталкивателя и выталкиватель скобок посредством кулачкового следящего элемента (790), таким образом вызывая различные скорости продольного поступательного перемещения стыковочной детали (784) следящего элемента, активатора (764) выталкивателя и выталкивателя скобок. Например, промежуточный участок (725) может обеспечивать относительно невысокую скорость дистального выдвигания активатора (764) выталкивателя, в то время как промежуточный участок (727) обеспечивает относительно высокую скорость проксимального втягивания активатора (764) выталкивателя. Конечно, эти скорости можно дополнительно изменять любым подходящим способом.
Хотя полный оборот кулачка (720) на 360º распределяется как 180º для дистального перемещения активатора (764) выталкивателя и оставшиеся 180º для проксимального перемещения активатора выталкивателя, следует понимать, что распределение возможно установить в любом другом подходящем соотношении (например, 270º для дистального перемещения и 90º для проксимального перемещения и т. д.). Также следует понимать, что полный диапазон дистального и проксимального перемещения можно обеспечить посредством вращения цилиндрического кулачка (720) меньше чем на 360º.
Некоторые варианты инструмента (10) содержат разрушаемую прокладку, которая может быть разрушена скальпелем, когда скальпель завершит полный дистальный диапазон перемещения, как описывалось выше со ссылкой на ФИГ. 42. Следует также дополнительно понимать, что конфигурация кулачкового выступа (722) может обеспечить увеличение передаточного отношения при достижении скальпелем конца своего дистального перемещения, таким образом обеспечивая большее усилие для разрушения прокладки и формирования скобок. Однако несмотря на это в некоторых вариантах разрушаемая прокладка может полностью отсутствовать.
G. Седьмой пример альтернативного двигателя и кулачкового узла
На ФИГ. 24A–24B показаны еще дополнительные примеры альтернативных компонентов, которые могут быть встроены в инструмент (200) для приведения в действие выталкивателя скобок и скальпеля. В частности, на ФИГ. 24A–24B показан пример альтернативного двигателя (810) и многокулачкового узла (820), выполненных с возможностью приведения в движение выталкивателя скобок (не показан) дистально и проксимально на один оборот многокулачкового узла (820) посредством поступательного перемещения активатора (864) выталкивателя и стыковочной детали (884) следящего элемента. Двигатель (810) располагается внутри узла рукоятки активатора (не показан) параллельно проксимальному участку активатора (864) выталкивателя. Многокулачковый узел (820) соединен с дистальным концом двигателя (810). Приведение в действие двигателя (810) вызывает вращение многокулачкового узла (820) вокруг продольной оси (LA7), образованной двигателем (810). Многокулачковый узел (820) содержит ствол (821) и пару кулачков (822A, 822B), присоединенных к стволу (821) в разных продольных положениях вдоль продольной оси (LA7). Хотя кулачки (822A, 822B) показаны на ФИГ. 24A–24B расположенными на расстоянии друг от друга продольно вдоль ствола (821), следует понимать, что кулачки (822A, 822B) вместо этого могут быть продольно смежными друг с другом (например так, что между кулачками (822A, 822B) нет продольного зазора).
Первый кулачок (822A) содержит первый участок (824A) и второй участок (826A). Первый участок (824A) и второй участок (826A) расположены на радиально противоположных сторонах первого кулачка (822A). Первый участок (824A) представляет собой участок первого кулачка (822A), имеющий большее радиальное расстояние от продольной оси (LA7), чем радиальное расстояние от продольной оси (LA7) до второго участка (826A). Первый кулачок (822A) дополнительно содержит промежуточные участки (825A, 827A), расположенные между первым участком (824A) и вторым участком (826A). Промежуточные участки (825A, 827A) имеют контур, обеспечивающий по существу плавный переход между первым участком (824A) и вторым участком (826A) с противоположных сторон кулачка (822B). Таким образом, относительно неподвижной точки в пространстве радиальное расстояние от первого кулачка (822A) до продольной оси (LA7) будет изменяться с большего радиального расстояния, представленного первым участком (824A), на меньшее радиальное расстояние, представленное вторым участком (826A), и обратно при вращении первого кулачка (822A) на один оборот.
Второй кулачок (822B) содержит первый участок (824B) и второй участок (826B). Первый участок (824B) и второй участок (826B) расположены на радиально противоположных сторонах второго кулачка (822B). Первый участок (824B) представляет собой участок второго кулачка (822B), имеющий большее радиальное расстояние от продольной оси (LA7), чем радиальное расстояние от продольной оси (LA7) до второго участка (826B). Второй кулачок (822B) дополнительно содержит промежуточные участки (825B, 827B), расположенные между первым участком (824B) и вторым участком (826B). Промежуточные участки (825B, 827B) имеют контур, обеспечивающий по существу плавный переход между первым участком (824B) и вторым участком (826B) с противоположных сторон кулачка (822B). Таким образом, относительно неподвижной точки в пространстве радиальное расстояние от второго кулачка (822B) до продольной оси (LA7) будет изменяться с большего радиального расстояния, представленного первым участком (824B), на меньшее радиальное расстояние, представленное вторым участком (826B), и обратно при вращении второго кулачка (822B) на один оборот. Хотя в этом примере второй кулачок (822B) имеет рабочий профиль 360º, следует понимать, что рабочий профиль второго кулачка (822B) не обязательно должен составлять 360º.
Как показано на ФИГ. 24A–24B, первый кулачок (822A) и второй кулачок (822B) ориентированы так, что первый участок (824A) первого кулачка (822A) и первый участок (824B) второго кулачка (822B) находятся в разных угловых положениях относительно ствола (821) многокулачкового узла (820). В частности, в настоящем примере первый кулачок (822A) и второй кулачок (822B) ориентированы так, что первый участок (824A) первого кулачка (822A) и первый участок (824B) второго кулачка (822B) находятся друг от друга в угловых положениях 180° вокруг ствола (821). Дополнительно первый кулачок (822A) и второй кулачок (822B) ориентированы так, что второй участок (826A) первого кулачка (822A) и второй участок (826B) второго кулачка (822B) находятся в противоположных угловых положениях относительно ствола (821). В частности, в настоящем примере первый кулачок (822A) и второй кулачок (822B) ориентированы так, что второй участок (826A) первого кулачка (822A) и первый участок (826B) второго кулачка (822B) находятся друг от друга в угловых положениях 180° вокруг ствола (821). Конечно, могут использоваться любые другие подходящие взаимоотношения.
Как показано на ФИГ. 24A-24B, стыковочная деталь (884) следящего элемента содержит поворотный кулачковый следящий элемент (890). Узел рукоятки содержит шарнирный штифт (872), с которым кулачковый следящий элемент (890) соединен с возможностью вращения так, что кулачковый следящий элемент (890) может свободно вращаться вокруг шарнирного штифта (872). Проксимальный конец первого участка (892) содержит проходящий вниз выступ (891). Выступ (891) первого участка (892) находится в контакте с первым кулачком (822A) в верхней части первого кулачка (822A) непосредственно по вертикали продольной оси (LA7). Дистальный конец второго участка (894) содержит проходящий вниз выступ (893). Выступ (893) второго участка (894) находится в контакте со вторым кулачком (822B) в верхней части второго кулачка (822B) непосредственно по вертикали продольной оси (LA7). Таким образом, следует понимать, что при вращении многокулачкового узла (820) на один оборот радиальное расстояние от проксимального конца первого участка (892) кулачкового следящего элемента (890) до продольной оси (LA7) будет изменяться с большего радиального расстояния, обусловленного первым участком (824A), на меньшее радиальное расстояние, обусловленное вторым участком (826B), и обратно; тогда как в то же самое время радиальное расстояние от дистального конца второго участка (894) кулачкового следящего элемента (890) до продольной оси (LA7) будет изменяться с меньшего радиального расстояния, обусловленного первым участком (826B), на большее радиальное расстояние, обусловленное первым участком (826A), и обратно. Это изменение радиальных расстояний первого участка (892) и второго участка (894) кулачкового следящего элемента (890) будет заставлять кулачковый следящий элемент (890) вращаться вокруг шарнирного штифта (872) из первого положения во второе положение и обратно при вращении ствола (821) на полный оборот.
Третий участок (896) кулачкового следящего элемента (890) представляет собой паз (895). Стыковочная деталь (884) следящего элемента содержит штифт (889), проходящий в боковом направлении от стыковочной детали (884) следящего элемента. Штифт (889) размещен с возможностью скольжения и вращения внутри паза (895) так, что кулачковый следящий элемент (890) соединен со стыковочной деталью (884) следящего элемента, и дополнительно так, что когда кулачковый следящий элемент (890) вращается вокруг шарнирного штифта (872), стыковочная деталь (884) следящего элемента поступательно перемещается продольно. Таким образом, следует понимать, что при вращении многокулачкового узла (820) на один оборот кулачковый следящий элемент (890) вращается из первого положения во второе положение, а затем обратно в первое положение, таким образом поступательно перемещая стыковочную деталь (884) следящего элемента из первого продольного положения во второе продольное положение и обратно. Это поступательное перемещение стыковочной детали (884) следящего элемента из первого продольного положения во второе продольное положение и обратно будет вызывать приведение в движение выталкивателя скобок из проксимального положения в дистальное положение и обратно посредством активатора (864) выталкивателя.
Промежуточные участки (825A, 825B) и промежуточные участки (827A, 827B) могут иметь различные контуры. Например, эти различные контуры могут представлять различные скорости изменения радиального расстояния от наружных поверхностей кулачков (822A, 822B) до продольной оси (LA7), представленные расстоянием от первых участков (824A, 824B) до вторых участков (826A, 826B), и наоборот. В частности, промежуточные участки (825A, 825B) могут представлять более медленную скорость изменения от радиального расстояния, представленного вторыми участками (826A, 826B), к радиальному расстоянию, представленному первыми участками (824A, 824B), тогда как промежуточные участки (827A, 827B) могут представлять более быструю скорость изменения от радиального расстояния, представленного первыми участками (824A, 824B), к радиальному расстоянию, представленному вторыми участками (826A, 826B), или наоборот, в зависимости от того, в каком направлении вращаются кулачки (822A, 822B). Такие отличающиеся скорости изменения будут передаваться на стыковочную деталь (884) следящего элемента, активатор (864) выталкивателя и выталкиватель скобок посредством кулачкового следящего элемента (890), приводя, таким образом, к разным скоростям продольного поступательного перемещения стыковочной детали (884) следящего элемента, активатора (864) выталкивателя и выталкивателя скобок. Например, промежуточные участки (825A, 825B) могут обеспечивать относительно низкую скорость дистального выдвижения активатора (864) выталкивателя, тогда как промежуточный участок (827A, 827B) обеспечивает относительно высокую скорость проксимального втягивания активатора (864) выталкивателя. Конечно, эти скорости можно дополнительно изменять любым подходящим способом.
Хотя полный оборот многокулачкового узла (820) на 360º распределяется как 180º для дистального перемещения активатора (864) выталкивателя и оставшиеся 180º для проксимального перемещения активатора выталкивателя, следует понимать, что распределение возможно установить в любом другом подходящем соотношении (например, 270º для дистального перемещения и 90º для проксимального перемещения и т. д.). Также следует понимать, что полный диапазон дистального и проксимального перемещения может быть обеспечен посредством вращения многокулачкового узла (820) менее чем на 360º.
Некоторые варианты инструмента (10) содержат разрушаемую прокладку, которая может быть разрушена скальпелем, когда скальпель завершит полный дистальный диапазон перемещения, как описывалось выше со ссылкой на ФИГ. 42. Следует также дополнительно понимать, что конфигурация первого участка (824A) первого кулачка (822A) может обеспечить увеличение передаточного отношения при достижении скальпелем конца своего дистального перемещения, таким образом обеспечивая большее усилие для разрушения прокладки и формирования скобок. Однако несмотря на это в некоторых вариантах разрушаемая прокладка может полностью отсутствовать.
H. Восьмой пример альтернативного двигателя и кулачкового узла
На ФИГ. 25A–26B показаны дополнительные примеры альтернативных компонентов, которые могут быть встроены в инструмент (200) для приведения в действие выталкивателя скобок и скальпеля. В частности, на ФИГ. 25A–25B показан пример альтернативного двигателя (910) и многокулачкового узла (920), выполненных с возможностью работы по существу сходным образом с двигателем (810) и многокулачковым узлом (820), описанными выше, за исключением описанных ниже отличий. Двигатель (910) и многокулачковый узел (920) выполнены с возможностью приведения в движение выталкивателя скобок (не показан) дистально и проксимально на один оборот многокулачкового узла (920) посредством поступательного перемещения активатора (964) выталкивателя и стыковочной детали (984) следящего элемента. Двигатель (910) располагается внутри узла рукоятки активатора (не показан) параллельно проксимальному участку активатора (964) выталкивателя. Многокулачковый узел (920) соединен со стволом (912), выступающим из дистального конца двигателя (910). Приведение в действие двигателя (910) вызывает вращение многокулачкового узла (920) вокруг продольной оси (LA8), образованной двигателем (910).
Многокулачковый узел (920) содержит пару кулачков (922A, 922B), присоединенных к стволу (912) в разных продольных положениях вдоль продольной оси (LA8). Первый кулачок (922A) содержит первый участок (924A) и второй участок (926A). Первый участок (924A) и второй участок (926A) расположены на радиально противоположных сторонах первого кулачка (922A). Первый участок (924A) представляет собой участок первого кулачка (922A), имеющий большее радиальное расстояние от продольной оси (LA8), чем радиальное расстояние от продольной оси (LA8) до второго участка (926A). Первый кулачок (922A) дополнительно содержит промежуточные участки (925A, 927A), расположенные между первым участком (924A) и вторым участком (926A). Промежуточные участки (925A, 927A) имеют контур, обеспечивающий по существу плавный переход между первым участком (924A) и вторым участком (926A) с противоположных сторон кулачка (922B). Таким образом, относительно неподвижной точки в пространстве радиальное расстояние от первого кулачка (922A) до продольной оси (LA7) будет изменяться с большего радиального расстояния, представленного первым участком (924A), на меньшее радиальное расстояние, представленное вторым участком (926A), и обратно при вращении первого кулачка (922A) на один оборот.
Второй кулачок (922B) содержит первый участок (924B) и второй участок (926B). Первый участок (924B) и второй участок (926B) расположены на радиально противоположных сторонах второго кулачка (922B). Первый участок (924B) представляет собой участок второго кулачка (922B), имеющий большее радиальное расстояние от продольной оси (LA8), чем радиальное расстояние от продольной оси (LA8) до второго участка (926B). Второй кулачок (922B) дополнительно содержит промежуточные участки (925B, 927B), расположенные между первым участком (924B) и вторым участком (926B). Промежуточные участки (925B, 927B) имеют контур, обеспечивающий по существу плавный переход между первым участком (924B) и вторым участком (926B) с противоположных сторон кулачка (922B). Таким образом, относительно неподвижной точки в пространстве радиальное расстояние от второго кулачка (922B) до продольной оси (LA8) будет изменяться с большего радиального расстояния, представленного первым участком (924B), на меньшее радиальное расстояние, представленное вторым участком (926B), и обратно при вращении второго кулачка (922B) на один оборот.
Как видно лучше всего на ФИГ. 26A–26B, первый кулачок (922A) и второй кулачок (922B) ориентированы так, что первый участок (924A) первого кулачка (922A) и первый участок (924B) второго кулачка (922B) находятся в разных угловых положениях относительно ствола (912) многокулачкового узла (920). В частности, в настоящем примере первый кулачок (922A) и второй кулачок (922B) ориентированы так, что первый участок (924A) первого кулачка (922A) и первый участок (924B) второго кулачка (922B) находятся друг от друга в угловых положениях 90° вокруг ствола (912). Также первый кулачок (922A) и второй кулачок (922B) ориентированы так, что второй участок (926A) первого кулачка (922A) и первый участок (926B) второго кулачка (922B) находятся друг от друга в угловых положениях 90° вокруг ствола (912). Первый кулачок (922A) и второй кулачок (922B) также имеют разные размеры.
Как показано на ФИГ. 26A–26B, стыковочная деталь (984) следящего элемента содержит поворотный кулачковый следящий элемент (990). Узел рукоятки содержит шарнирный штифт (972), с которым кулачковый следящий элемент (990) соединен с возможностью вращения так, что кулачковый следящий элемент (990) может свободно вращаться вокруг шарнирного штифта (972). Проксимальный конец первого участка (992) содержит проходящий вниз выступ (991). Выступ (991) первого участка (992) находится в контакте с первым кулачком (922A) в верхней части первого кулачка (922A) непосредственно по вертикали продольной оси (LA8). Дистальный конец второго участка (993) содержит проходящий вниз выступ (993). Выступ (993) второго участка (994) находится в контакте со вторым кулачком (922B) в нижней части второго кулачка (922B) непосредственно по вертикали продольной оси (LA8). Таким образом, следует понимать, что при вращении многокулачкового узла (920) на один оборот радиальное расстояние от выступа (991) кулачкового следящего элемента (990) до продольной оси (LA8) будет изменяться с большего радиального расстояния, обусловленного первым участком (924A), на меньшее радиальное расстояние, обусловленное вторым участком (926B), и обратно; тогда как в то же самое время радиальное расстояние от выступа (993) кулачкового следящего элемента (990) до продольной оси (LA8) будет изменяться с меньшего радиального расстояния, обусловленного первым участком (926B), на большее радиальное расстояние, обусловленное первым участком (926A), и обратно. Это изменение радиальных расстояний первого участка (992) и второго участка (994) кулачкового следящего элемента (990) будет заставлять кулачковый следящий элемент (990) вращаться вокруг шарнирного штифта (972) из первого положения во второе положение и обратно при завершении вращения ствола (912) на полный оборот.
Третий участок (996) кулачкового следящего элемента (990) формирует паз (995). Стыковочная деталь (984) следящего элемента содержит штифт (989), проходящий в боковом направлении от стыковочной детали (984) следящего элемента. Штифт (989) размещен с возможностью скольжения и вращения внутри паза (995) так, что кулачковый следящий элемент (990) соединен со стыковочной деталью (984) следящего элемента, и дополнительно так, что когда кулачковый следящий элемент (990) вращается вокруг шарнирного штифта (972), стыковочная деталь (984) следящего элемента поступательно перемещается продольно. Таким образом, следует понимать, что при вращении многокулачкового узла (920) на один оборот кулачковый следящий элемент (990) вращается из первого положения во второе положение, а затем обратно в первое положение, таким образом поступательно перемещая стыковочную деталь (984) следящего элемента из первого продольного положения во второе продольное положение и обратно. Это поступательное перемещение стыковочной детали (984) следящего элемента из первого продольного положения во второе продольное положение и обратно будет вызывать приведение в движение выталкивателя скобок из проксимального положения в дистальное положение и обратно посредством активатора (964) выталкивателя.
Как показано на ФИГ. 26A–26B, промежуточные участки (925A, 925B) и промежуточные участки (927A, 927B) могут иметь различные контуры. Эти различные контуры представляют различные скорости изменения радиального расстояния от наружных поверхностей кулачков (922A, 922B) до продольной оси (LA7), представленных расстоянием от первых участков (924A, 924B) до вторых участков (926A, 926B), и наоборот. В частности, промежуточные участки (925A, 925B) представляют более медленную скорость изменения от радиального расстояния, представленного вторыми участками (926A, 926B), к радиальному расстоянию, представленному первыми участками (924A, 924B), тогда как промежуточные участки (927A, 927B) представляют более быструю скорость изменения от радиального расстояния, представленного первыми участками (924A, 924B), к радиальному расстоянию, представленному вторыми участками (926A, 926B), или наоборот, в зависимости от того, в каком направлении вращаются кулачки (922A, 922B). Следует понимать, что эти различные скорости изменения будут передаваться на стыковочную деталь (984) следящего элемента, активатор (964) выталкивателя и выталкиватель скобок посредством кулачкового следящего элемента (990), таким образом вызывая различные скорости продольного поступательного перемещения стыковочной детали (984) следящего элемента, активатора (964) выталкивателя и выталкивателя скобок. Например, промежуточные участки (925A, 925B) могут обеспечивать относительно низкую скорость дистального выдвижения активатора (964) выталкивателя, тогда как промежуточный участок (927A, 927B) обеспечивает относительно высокую скорость проксимального втягивания активатора (964) выталкивателя. Конечно, эти скорости можно дополнительно изменять любым подходящим способом.
Хотя полный оборот многокулачкового узла (920) на 360º распределяется как 180º для дистального перемещения активатора (964) выталкивателя и оставшиеся 180º для проксимального перемещения активатора выталкивателя, следует понимать, что распределение возможно установить в любом другом подходящем соотношении (например, 270º для дистального перемещения и 90º для проксимального перемещения и т. д.). Также следует понимать, что полный диапазон дистального и проксимального перемещения может быть обеспечен посредством вращения многокулачкового узла (920) менее чем на 360º.
Некоторые варианты инструмента (10) содержат разрушаемую прокладку, которая может быть разрушена скальпелем, когда скальпель завершит полный дистальный диапазон перемещения, как описывалось выше со ссылкой на ФИГ. 42. Следует также дополнительно понимать, что конфигурация первого участка (924A) первого кулачка (922A) может обеспечить увеличение передаточного отношения при достижении скальпелем конца своего дистального перемещения, таким образом обеспечивая большее усилие для разрушения прокладки и формирования скобок. Однако несмотря на это в некоторых вариантах разрушаемая прокладка может полностью отсутствовать.
III. Пример кругового хирургического сшивающего инструмента с электроприводом и с наклонной пистолетной рукояткой
Хотя вышеописанные примеры включают в себя двигатель, расположенный внутри узла рукоятки активатора в положении, параллельном проксимальному участку активатора выталкивателя, следует понимать, что двигатель может быть расположен в различных других положениях. Примеры, описанные ниже, включают в себя двигатели, ориентированные наклонно относительно проксимального участка активатора выталкивателя. Следует понимать, что следующие примеры являются исключительно иллюстративными. Различные другие подходящие способы, в которых двигатель может быть ориентирован наклонно (или иным не параллельным образом) по отношению к проксимальному участку активатора выталкивателя, будут очевидны специалистам в данной области в контексте идей, представленных в настоящем документе.
A. Адаптер приводного механизма конической шестерни для наклонного двигателя
На ФИГ. 27 показан пример альтернативного кругового хирургического сшивающего инструмента (1000). Инструмент (1000) этого примера по существу аналогичен инструменту (10), описанному выше, в том, что инструмент (1000) включает в себя узел (1002) сшивающей головки, аналогичный узлу (20) сшивающей головки, упор (1004), аналогичный упору (40) и ручку (1008), аналогичную ручке (98). Инструмент (1000) также включает в себя узел (1006) изогнутого ствола, по существу аналогичный узлу (60) ствола, за исключением того, что узел (1006) ствола является изогнутым, тогда как узел (60) ствола является прямым. В отличие от инструмента (10), инструмент (1000) этого примера включает в себя узел (1070) рукоятки, который формирует наклонно ориентированную пистолетную рукоятку (1020). Также, в отличие от инструмента (10), инструмент (1000) этого примера включает в себя двигатель (1010), расположенный внутри пистолетной рукоятки (1020). Обе детали, двигатель (1010) и пистолетная рукоятка (1020), ориентированы наклонно относительно продольной оси, образованной активатором (1064) выталкивателя. Активатор (1064) выталкивателя поступательно перемещается внутри узла (1006) ствола для приведения в действие узла (1002) сшивающей головки так, что активатор (1064) выталкивателя работает сходным образом с активатором (64) выталкивателя, описанным выше. Аккумуляторная батарея (1011) составляет единое целое с узлом (1070) рукоятки, обеспечивая электропитание двигателя (1010), хотя следует понимать, что в некоторых других вариантах двигатель (1010) может получать электропитание от удаленного источника.
Первая коническая шестерня (1012) присоединена к цельному приводному валу двигателя (1010) так, что вращение двигателя (1010) вызывает вращение конической шестерни (1012). Вторая коническая шестерня (1014) присоединена к проксимальному концу кулачка (1040). Кулачок (1040) дополнительно соединен с активатором (1064) выталкивателя так, что вращение кулачка (1040) вызывает продольное поступательное перемещение активатора (1064) выталкивателя. Конические шестерни (1012, 1014) ориентированы на осях вращения, которые являются наклонными по отношению друг к другу. Первая коническая шестерня (1012) и вторая коническая шестерня (1014) находятся в зацеплении так, что вращение первой конической шестерни (1012) приводит к вращению второй конической шестерни (1014). Таким образом, следует понимать, что приведение в действие двигателя (1010) вызывает вращение кулачка (1040) и, таким образом, поступательное перемещение активатора (1064) выталкивателя посредством наклонного зацепления с коническими шестернями (1012, 1014). Конфигурация кулачка (1040) настоящего примера может быть выполнена в соответствии с любым из кулачков (220, 320, 420, 520, 620, 720) и/или узлов (820, 920) кулачков, описанных выше. Конические шестерни (1012, 1014), таким образом, можно рассматривать как выступающие в качестве адаптера привода между наклонно ориентированным двигателем (1010) и кулачками (220, 320, 420, 520, 620, 720) и/или узлами (820, 920) кулачков, описанными выше. Следует понимать, что положение, показанное на ФИГ. 27, является всего лишь примером. Двигатель (1010) и/или пистолетная рукоятка (1020) могут иметь любое другое подходящее положение, как будет очевидно обычным специалистам в данной области в контексте идей, представленных в настоящем документе.
B. Многокулачковый узел для наклонного двигателя
На ФИГ. 28 показан другой альтернативный круговой хирургический сшивающий инструмент (1100). Инструмент (1100) этого примера по существу аналогичен инструменту (10), описанному выше, в том, что инструмент (1100) включает в себя узел (1102) сшивающей головки, аналогичный узлу (20) сшивающей головки, упор (1104), аналогичный упору (40) и ручку (1108), аналогичную ручке (98). Инструмент (1100) также включает в себя узел (1106) изогнутого ствола, по существу аналогичный узлу (60) ствола, за исключением того, что узел (1106) ствола является изогнутым, тогда как узел (60) ствола является прямым. В отличие от инструмента (10), инструмент (1100) этого примера включает в себя узел рукоятки (не показан), который формирует наклонно ориентированную пистолетную рукоятку (не показана). Конфигурация такого узла рукоятки и пистолетной рукоятки может быть выполнена подобно узлу (1070) рукоятки и пистолетной рукоятке (1020), описанным выше. Также, в отличие от инструмента (10), инструмент (1100) этого примера включает в себя двигатель (1110), расположенный внутри пистолетной рукоятки. Обе детали, двигатель (1110) и пистолетная рукоятка, ориентированы наклонно относительно продольной оси, образованной активатором (1164) выталкивателя. Активатор (1164) выталкивателя поступательно перемещается внутри узла (1106) ствола для приведения в действие узла (1102) сшивающей головки так, что активатор (1164) выталкивателя работает сходным образом с активатором (64) выталкивателя, описанным выше. Аккумуляторная батарея (1111) составляет единое целое с узлом рукоятки, обеспечивая электропитание двигателя (1110), хотя следует понимать, что в некоторых других вариантах двигатель (1110) может получать электропитание от удаленного источника.
Пусковой крючок и узел (1112) предохранительного крючка соединены с узлом рукоятки и выполнены с возможностью избирательного активирования двигателя (1110). Только в качестве примера, конфигурация пускового крючка и узла (1112) предохранительного крючка может быть выполнена в соответствии с, по меньшей мере, некоторыми из идей, представленных в заявке на патент США № [досье патентного поверенного № END7291USNP.0606446], озаглавленной «ЭЛЕМЕНТЫ УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ СШИВАЮЩИМ ИНСТРУМЕНТОМ С ЭЛЕКТРОПРИВОДОМ», поданной в тот же день, что и настоящая заявка, описание которой включено в настоящий документ путем ссылки. Инструмент (1100) может также включать в себя пусковой переключатель и стопорный переключатель, выполненные в соответствии с, по меньшей мере, некоторыми из идей, представленных в заявке на патент США № [досье патентного поверенного № END7291USNP.0606446], озаглавленной «ЭЛЕМЕНТЫ УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ СШИВАЮЩИМ ИНСТРУМЕНТОМ С ЭЛЕКТРОПРИВОДОМ», поданной в тот же день, что и настоящая заявка, описание которой включено в настоящий документ путем ссылки. Другие подходящие варианты пускового крючка и узла (1112) предохранительного крючка, а также пускового и стопорного переключателя будут очевидны обычным специалистам в данной области в контексте идей, представленных в настоящем документе. Также следует понимать, что любой из других сшивающих инструментов, описанных в настоящем документе, может включать в себя пусковой крючок и узел (1112) предохранительного крючка и/или пусковые и стопорные переключатели, выполненные в соответствии с, по меньшей мере, некоторыми из идей, представленных в заявке на патент США № [досье патентного поверенного № END7291USNP.0606446], озаглавленной «ЭЛЕМЕНТЫ УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ СШИВАЮЩИМ ИНСТРУМЕНТОМ С ЭЛЕКТРОПРИВОДОМ», поданной в тот же день, что и настоящая заявка, описание которой включено в настоящий документ путем ссылки.
Как видно лучше всего на ФИГ. 29–31, двигатель (1110) соединен с многокулачковым узлом (1120) так, что активация двигателя (1110) будет вращать многокулачковый узел (1120) вокруг оси, которая продольно проходит через центр двигателя (1110) и через центр многокулачкового узла (1120). Многокулачковый узел (1120) находится в зацеплении с поворотным кулачковым следящим элементом (1190), который соединен с возможностью поворота с узлом рукоятки. В частности, кулачковый следящий элемент (1190) включает в себя поворотное отверстие (1198), в котором расположен шарнирный штифт (1172). Таким образом, кулачковый следящий элемент (1190) может поворачиваться вокруг продольной оси, образованной шарнирным штифтом (1172). Кулачковый следящий элемент (1190) также соединен с возможностью поворота со стыковочной деталью (1184) следящего элемента, которая дополнительно соединена с активатором (1164) выталкивателя. Как будет более подробно описано ниже, при вращении многокулачкового узла (1120) двигателем (1110) на первый диапазон углового перемещения кулачковый следящий элемент (1190) будет поворачиваться в первом направлении (на виде, представленном на ФИГ. 29 - по часовой стрелке; на виде, представленном на ФИГ. 31 - против часовой стрелки), таким образом приводя в движение стыковочную деталь (1184) следящего элемента и активатор (1164) выталкивателя дистально. Это дистальное перемещение будет приводить в движение скальпель и выталкивать скобки через ткань, захваченную между узлом (1102) сшивающей головки и упором (1104), как описано выше. При вращении многокулачкового узла (1120) двигателем (1110) на второй диапазон углового перемещения кулачковый следящий элемент (1190) будет поворачиваться во втором направлении (на виде, представленном на ФИГ. 29 - против часовой стрелки; на виде, представленном на ФИГ. 31 - по часовой стрелке), таким образом приводя в движение стыковочную деталь (1184) следящего элемента и активатор (1164) выталкивателя проксимально. Это проксимальное перемещение будет втягивать скальпель обратно в узел (1102) сшивающей головки.
На ФИГ. 32 более подробно показан кулачковый следящий элемент (1190). Кулачковый следящий элемент (1190) включает в себя первый выступ (1192), второй выступ (1194) и соединительный конец (1196). Выступы (1192, 1194) находятся в зацеплении с многокулачковым узлом (1120), как будет более подробно описано ниже. Соединительный конец (1196) соединен с возможностью поворота со стыковочной деталью (1184) следящего элемента.
Многокулачковый узел (1120) включает в себя первый кулачковый элемент (1122) и второй кулачковый элемент (1126). Как видно лучше всего на ФИГ. 33, первый кулачковый элемент (1122) формирует отверстие (1123), выполненное с возможностью приема приводного вала (не показан) двигателя (1110). Первый кулачковый элемент (1122) также включает в себя выступающий дистально кулачковый элемент (1124), который включает в себя контурированный скос (1125). Кулачковый элемент (1124) выполнен с возможностью вхождения в зацепление с первым выступом кулачкового следящего элемента (1190) во время вращения многокулачкового узла (1120) на второй диапазон углового перемещения, таким образом приводя в движение стыковочную деталь (1184) следящего элемента и активатор (1164) выталкивателя проксимально из дистального положения в проксимальное положение.
Как видно лучше всего на ФИГ. 34, второй кулачковый элемент (1126) формирует отверстие (1129), выполненное с возможностью приема приводного вала двигателя (1110). Таким образом, следует понимать, что отверстия (1123, 1129) кулачковых элементов (1122, 1126) совмещены друг с другом вдоль приводного вала двигателя (1110). Второй кулачковый элемент (1126) также включает в себя боковую изогнутую кулачковую поверхность (1127) и боковую по существу плоскую кулачковую поверхность (1128). Изогнутая кулачковая поверхность (1127) выполнена с возможностью вхождения в зацепление со вторым выступом (1194) кулачкового следящего элемента (1190) во время вращения многокулачкового узла (1120) на первый диапазон углового перемещения, таким образом приводя в движение стыковочную деталь (1184) следящего элемента и активатор (1164) выталкивателя дистально из проксимального положения в дистальное положение. При вращении многокулачкового узла (1120) на второй диапазон углового перемещения по существу плоская кулачковая поверхность (1128) обеспечивает промежуток для второго выступа (1194), допуская поворот кулачкового следящего элемента (1190), когда кулачковый следящий элемент (1190) тянет стыковочную деталь (1184) следящего элемента и активатор (1164) выталкивателя проксимально из дистального положения в проксимальное положение.
В свете вышеизложенного следует понимать, что изогнутая кулачковая поверхность (1127) второго кулачкового элемента (1126) приводит в движение активатор (1164) выталкивателя дистально посредством перемещения ко второму выступу (1194) кулачкового следящего элемента (1190), таким образом приводя в действие узел (1102) сшивающей головки, в то время как кулачковый элемент (1124) первого кулачкового элемента (1122) приводит в движение активатор (1164) выталкивателя проксимально посредством перемещения к первому выступу (1192) кулачкового следящего элемента (1190). Таким образом, многокулачковый узел (1120) выполнен с возможностью выдвигать и втягивать активатор (1164) выталкивателя посредством вращения на один оборот. В некоторых других вариантах многокулачковый узел (1120) выполнен с возможностью выдвигать и втягивать активатор (1164) выталкивателя посредством вращения меньше чем на один оборот. В настоящем примере первый диапазон углового перемещения многокулачкового узла (1120), связанный с выдвижением активатора (1164) выталкивателя, представляет собой первые 180º; в то время как второй диапазон углового перемещения многокулачкового узла (1120), связанный с втягиванием активатора (1164) выталкивателя, представляет собой вторые 180º. В некоторых других вариантах первый диапазон углового перемещения многокулачкового узла (1120), связанный с выдвижением активатора (1164) выталкивателя, составляет около 270º; в то время как второй диапазон углового перемещения многокулачкового узла (1120), связанный с втягиванием активатора (1164) выталкивателя, составляет около 90º. Другие подходящие угловые диапазоны перемещения будут очевидны специалистам в данной области в контексте идей, представленных в настоящем документе. Другими словами, распределение дистального перемещения и проксимального перемещения на основании вращения многокулачкового узла (1120) возможно установить в любом другом подходящем соотношении. Также следует понимать, что полный диапазон дистального и проксимального перемещения может быть обеспечен посредством вращения многокулачкового узла (1120) менее чем на 360º.
Некоторые варианты упора (1104) содержат разрушаемую прокладку, которая разрушается скальпелем, когда скальпель завершает полный дистальный диапазон перемещения, как описано выше со ссылкой на ФИГ. 42. Следует также дополнительно понимать, что конфигурация изогнутой кулачковой поверхности (1127) может обеспечить увеличение передаточного отношения при достижении скальпелем конца своего дистального перемещения, таким образом обеспечивая большее усилие для разрушения прокладки и формирования скобок. Однако несмотря на это в некоторых вариантах разрушаемая прокладка может полностью отсутствовать.
C. Многокулачковый элемент для наклонного двигателя
На ФИГ. 35 показаны элементы еще одного примера альтернативного кругового хирургического сшивающего инструмента, который также может включать в себя элементы, аналогичные узлу (20) сшивающей головки, упору (40), ручке (98), узлу (1006) изогнутого ствола и т. д. Инструмент настоящего примера также включает в себя узел (1270) рукоятки с наклонно ориентированной пистолетной рукояткой (1271) и двигатель (1210), расположенный внутри пистолетной рукоятки (1271). Обе детали, двигатель (1210) и пистолетная рукоятка (1271), ориентированы наклонно относительно продольной оси, образованной активатором (1264) выталкивателя. Активатор (1264) выталкивателя поступательно перемещается внутри узла ствола для приведения в действие узла сшивающей головки так, что активатор (1264) выталкивателя работает сходным образом с активатором (64) выталкивателя, описанным выше. Аккумуляторная батарея (не показана) составляет единое целое с узлом (1270) рукоятки, обеспечивая электропитание двигателя (1210), хотя следует понимать, что в некоторых других вариантах двигатель (1210) может получать электропитание от удаленного источника.
Пусковой крючок и узел (1222) предохранительного крючка соединены с узлом рукоятки и выполнены с возможностью избирательного активирования двигателя (1210). Только в качестве примера, конфигурация пускового крючка и узла (1222) предохранительного крючка может быть выполнена в соответствии с, по меньшей мере, некоторыми из идей, представленных в заявке на патент США № [досье патентного поверенного № END7291USNP.0606446], озаглавленной «ЭЛЕМЕНТЫ УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ СШИВАЮЩИМ ИНСТРУМЕНТОМ С ЭЛЕКТРОПРИВОДОМ», поданной в тот же день, что и настоящая заявка, описание которой включено в настоящий документ путем ссылки. Инструмент настоящего примера может также включать в себя пусковой переключатель и стопорный переключатель, выполненные в соответствии с, по меньшей мере, некоторыми из идей, представленных в заявке на патент США № [досье патентного поверенного № END7291USNP.0606446], озаглавленной «ЭЛЕМЕНТЫ УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ СШИВАЮЩИМ ИНСТРУМЕНТОМ С ЭЛЕКТРОПРИВОДОМ», поданной в тот же день, что и настоящая заявка, описание которой включено в настоящий документ путем ссылки. Другие подходящие варианты пускового крючка и узла (1222) предохранительного крючка, а также пускового и стопорного переключателя будут очевидны обычным специалистам в данной области в контексте идей, представленных в настоящем документе.
Как видно лучше всего на ФИГ. 35–36 и 41A–41B, двигатель (1210) соединен с многокулачковым элементом (1220) так, что активация двигателя (1210) будет вращать многокулачковый элемент (1220) вокруг оси, которая продольно проходит через центр двигателя (1210) и через центр многокулачкового элемента (1220). Многокулачковый элемент (1220) находится в зацеплении с поворотным кулачковым следящим элементом (1290), который соединен с возможностью поворота с узлом (1270) рукоятки. В частности, кулачковый следящий элемент (1290) включает в себя поворотное отверстие (1298), в котором расположен шарнирный штифт (1272). Таким образом, кулачковый следящий элемент (1290) может поворачиваться вокруг продольной оси, образованной шарнирным штифтом (1272). Кулачковый следящий элемент (1290) также соединен с возможностью поворота со стыковочной деталью (1284) следящего элемента, которая дополнительно соединена с активатором (1264) выталкивателя. Как будет более подробно описано ниже, при вращении многокулачкового элемента (1220) двигателем (1210) на первый диапазон углового перемещения кулачковый следящий элемент (1290) будет поворачиваться в первом направлении (на виде, представленном на ФИГ. 35 - по часовой стрелке; на виде, представленном на ФИГ. 41A–41B - против часовой стрелки), таким образом приводя в движение стыковочную деталь (1284) следящего элемента и активатор (1264) выталкивателя дистально. Это дистальное перемещение будет приводить в движение скальпель и выталкивать скобки через ткань, захваченную между узлом сшивающей головки и упором, как описано выше. При вращении многокулачкового элемента (1220) двигателем (1210) на второй диапазон углового перемещения кулачковый следящий элемент (1290) будет поворачиваться во втором направлении (на виде, представленном на ФИГ. 35 - против часовой стрелки; на виде, представленном на ФИГ. 41A–41B - по часовой стрелке), таким образом приводя в движение стыковочную деталь (1284) следящего элемента и активатор (1264) выталкивателя проксимально. Это проксимальное перемещение будет втягивать скальпель обратно в узел сшивающей головки.
На ФИГ. 37–38 более подробно показан многокулачковый элемент (1220). Многокулачковый элемент (1220) включает в себя первый кулачковый элемент (1222), второй кулачковый элемент (1226) и выступающую дистально стойку (1228). Стойка (1228) соосно совмещена с продольной осью двигателя (1210). Следует понимать, что стойка (1228) может в некоторых вариантах отсутствовать. Первый кулачковый элемент (1222) включает в себя изогнутую кулачковую поверхность (1223) и по существу плоскую кулачковую поверхность (1224). Изогнутая кулачковая поверхность (1223) представлена по существу радиально наружу. Второй кулачковый элемент (1226) включает в себя изогнутую кулачковую поверхность (1227) и смежную по существу плоскую направляющую поверхность (1229). Поверхности (1227, 1229) представлены по существу радиально внутрь. Изогнутые кулачковые поверхности (1223, 1227) образованы различными радиусами кривизны, проходящими от различных источников. Источник радиуса кривизны для каждой изогнутой кулачковой поверхности (1223, 1227) смещен от стойки (1228).
На ФИГ. 39–40 более подробно показан кулачковый следящий элемент (1290). Кулачковый следящий элемент (1290) включает в себя первый выступ (1292), второй выступ (1294) и соединительный конец (1296). Соединительный конец (1296) соединен с возможностью поворота со стыковочной деталью (1284) следящего элемента. Выступы (1292, 1294) находятся в зацеплении с многокулачковым элементом (1220). В частности, первый выступ (1292) выполнен с возможностью вхождения в зацепление с первым кулачковым элементом (1222), а второй выступ (1294) выполнен с возможностью вхождения в зацепление со вторым кулачковым элементом (1226). Взаимодействие между выступами (1292, 1294) и соответствующими кулачковыми элементами (1222, 1226) обеспечивает выдвижение и втягивание активатора (1264) выталкивателя, как показано на ФИГ. 41A–41B.
На ФИГ. 41A показан многокулачковый элемент (1220) в исходном положении с активатором (1264) выталкивателя в проксимальном положении. При активации двигателем (1210) вращения многокулачкового элемента (1220) (например, на виде, представленном на ФИГ. 38 - по часовой стрелке) на первый диапазон углового перемещения изогнутая кулачковая поверхность (1223) первого кулачкового элемента (1222) перемещается к первому выступу (1292). Это вызывает поворот кулачкового следящего элемента (1290) в первом направлении (на виде, представленном на ФИГ. 41A–41B - против часовой стрелки), таким образом приводя в движение стыковочную деталь (1284) следящего элемента и активатор (1264) выталкивателя дистально, как показано на ФИГ. 41B. Это дистальное перемещение будет приводить в движение скальпель и выталкивать скобки через ткань, захваченную между узлом сшивающей головки и упором, как описано выше. При продолжении вращения двигателем (1210) многокулачкового элемента (1220) (например, на виде, представленном на ФИГ. 38 - по часовой стрелке) на второй диапазон углового перемещения изогнутая кулачковая поверхность (1227) второго кулачкового элемента (1226) перемещается ко второму выступу (1292). Это вызывает поворот кулачкового следящего элемента (1290) во втором направлении (на виде, представленном на ФИГ. 41A–41B - по часовой стрелке), таким образом приводя в движение стыковочную деталь (1284) следящего элемента и активатор (1264) выталкивателя проксимально назад в исходное положение, как показано на ФИГ. 41A. В некоторых других вариантах стыковочная деталь (1284) следящего элемента и активатор (1264) выталкивателя не обязательно передвигаются полностью обратно в положение, показанное на ФИГ. 41A, но передвигаются обратно в положение, являющееся проксимальным по отношению к дистальному положению, показанному на ФИГ. 41B. Проксимальное перемещение активатора (1264) выталкивателя будет втягивать скальпель обратно в узел сшивающей головки. Следует понимать, что по существу плоская поверхность (1224) обеспечивает промежуток для первого выступа (1292) при вращении на второй диапазон углового перемещения, допуская поворот кулачкового следящего элемента (1290), когда второй кулачковый элемент (1226) тянет стыковочную деталь (1284) следящего элемента и активатор (1264) выталкивателя проксимально из дистального положения в проксимальное положение. Также следует понимать, что направляющая поверхность (1227) и изогнутая направляющая часть (1295) второго выступа (1294) могут взаимодействовать в целях облегчения захвата второго выступа (1294) вторым кулачковым элементом (1226), когда многокулачковый элемент (1220) переходит из первого диапазона углового перемещения во второй диапазон углового перемещения.
В свете вышеизложенного следует понимать, что изогнутая кулачковая поверхность (1223) первого кулачкового элемента (1222) приводит в движение активатор (1264) выталкивателя дистально посредством перемещения к первому выступу (1292) кулачкового следящего элемента (1290), таким образом приводя в действие узел сшивающей головки, в то время как второй кулачковый элемент (1226) приводит в движение активатор (1264) выталкивателя проксимально посредством перемещения ко второму выступу (1294) кулачкового следящего элемента (1290). Таким образом, многокулачковый элемент (1220) выполнен с возможностью выдвигать и втягивать активатор (1264) выталкивателя посредством вращения на один оборот. В некоторых других вариантах многокулачковый элемент (1220) выполнен с возможностью выдвигать и втягивать активатор (1264) выталкивателя посредством вращения меньше чем на один оборот. В настоящем примере первый диапазон углового перемещения многокулачкового элемента (1220), связанный с выдвижением активатора (1264) выталкивателя, составляет около 270º; в то время как второй диапазон углового перемещения многокулачкового элемента (1220), связанный с втягиванием активатора (1264) выталкивателя, составляет около 90º. В некоторых других вариантах первый диапазон углового перемещения многокулачкового элемента (1220), связанный с выдвижением активатора (1264) выталкивателя, представляет собой первые 180º; в то время как второй диапазон углового перемещения многокулачкового элемента (1220), связанный с втягиванием активатора (1264) выталкивателя, представляет собой вторые 180º. Другие подходящие угловые диапазоны перемещения будут очевидны специалистам в данной области в контексте идей, представленных в настоящем документе. Другими словами, распределение дистального перемещения и проксимального перемещения на основании вращения многокулачкового элемента (1220) возможно установить в любом другом подходящем соотношении. Также следует понимать, что полный диапазон дистального и проксимального перемещения может быть обеспечен посредством вращения многокулачкового элемента (1220) менее чем на 360º.
Некоторые варианты упора содержат разрушаемую прокладку, которая разрушается скальпелем, когда скальпель завершает полный дистальный диапазон перемещения, как описано выше со ссылкой на ФИГ. 42. Следует также дополнительно понимать, что конфигурация изогнутой кулачковой поверхности (1223) может обеспечить увеличение передаточного отношения при достижении скальпелем конца своего дистального перемещения, таким образом обеспечивая большее усилие для разрушения прокладки и формирования скобок. Однако несмотря на это в некоторых вариантах разрушаемая прокладка может полностью отсутствовать.
IV. Прочая информация
В любом из описанных выше примеров микроконтроллер, специализированную интегральную микросхему (ASIC) и/или другой тип модуля управления можно соединить с источником электропитания и двигателем (210, 310, 410, 510, 610, 710, 810, 910, 1010, 1110, 1210), и они могут быть выполнены с возможностью автоматической остановки двигателя (210, 310, 410, 510, 610, 710, 810, 910, 1010, 1110, 1210), таким образом обеспечивая способ динамического торможения двигателя (210, 310, 410, 510, 610, 710, 810, 910, 1010, 1110, 1210) так, что двигатель (210, 310, 410, 510, 610, 710, 810, 910, 1010, 1110, 1210) может быть приведен в действие ровно на один оборот соответствующего приводного вала. Только в качестве примера, такой модуль управления может находиться в соединении с кодирующим устройством, соединенным с приводным валом, или каким-либо другим компонентом, который перемещается в ответ на активацию двигателя (210, 310, 410, 510, 610, 710, 810, 910, 1010, 1110, 1210). В качестве другого исключительно иллюстративного примера такой модуль управления может находиться в соединении с одним или более герконовыми переключателями, соединенными с приводным валом или каким-либо другим компонентом, который перемещается в ответ на активацию двигателя (210, 310, 410, 510, 610, 710, 810, 910, 1010, 1110, 1210). Другие подходящие типы датчиков и модулей управления, которые можно использовать для обеспечения точной остановки двигателя (210, 310, 410, 510, 610, 710, 810, 910, 1010, 1110, 1210) (например, на основе отслеживаемого вращения компонента, на основе поступательного перемещения компонента и/или на основе какого-либо другого параметра и т. д.) будут очевидны специалистам в данной области в контексте идей, представленных в настоящем документе. Конечно, модуль управления может быть выполнен с возможностью управления двигателем (210, 310, 410, 510, 610, 710, 810, 910, 1010, 1110, 1210) для активации любого подходящего числа вращений и т. д. В некоторых случаях управление запуском и остановкой двигателя (210, 310, 410, 510, 610, 710, 810, 910, 1010, 1110, 1210) может быть выполнено в соответствии с идеями, изложенными в заявке на патент США № [досье патентного поверенного № END7291USNP.0606446], озаглавленной «ЭЛЕМЕНТЫ УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ СШИВАЮЩИМ ИНСТРУМЕНТОМ С ЭЛЕКТРОПРИВОДОМ», поданной в тот же день, что и настоящая заявка, описание которой включено в настоящий документ путем ссылки.
Следует понимать, что любое одно или более из идей, выражений, вариантов осуществления, примеров и т. д., описанных в настоящем документе, можно скомбинировать с любым одним или более из других идей, выражений, вариантов осуществления, примеров и т. д., описанных в настоящем документе. Поэтому не следует рассматривать описанные выше идеи, выражения, варианты осуществления, примеры и т. д. отдельно друг от друга. В контексте идей, представленных в настоящем документе, обычным специалистам в данной области будут очевидны различные подходящие способы, которыми можно комбинировать идеи, представленные в настоящем документе. Предполагается, что такие модификации и вариации включены в объем формулы изобретения.
По меньшей мере, часть идей настоящего документа можно легко объединить с одной или более идеями патента США № 7,794,475, озаглавленного «Хирургические скобки, имеющие сжимаемые или раздавливаемые элементы для закрепления в них тканей, и сшивающие инструменты для размещения таких скобок», выданного 14 сентября 2010 г., описание которого включено в настоящий документ путем ссылки; заявкой на патент США № 13/693,430, озаглавленной «Система трансорального введения кругового упора с расширяющим элементом конструкции», поданной 4 декабря 2012 г., описание которой включено в настоящий документ путем ссылки; заявкой на патент США № 13/688,951, озаглавленной «Хирургическая скобка со встроенной подушечкой для отклонения кончика», поданной 29 ноября 2012 г., описание которой включено в настоящий документ путем ссылки; заявкой на патент США № 13/706,827, озаглавленной «Хирургический сшивающий инструмент со скобками, имеющими переменную ширину при разных окружностях», поданной 6 декабря 2012 г., описание которой включено в настоящий документ путем ссылки; заявкой на патент США № 13/688,992, озаглавленной «Вращающийся упор для кругового хирургического сшивающего инструмента», поданной 29 ноября 2012 г., описание которой включено в настоящий документ путем ссылки; заявкой на патент США № 13/693,455, озаглавленной «Система введения кругового упора с выравнивающим элементом», поданной 4 декабря 2012 г., описание которой включено в настоящий документ путем ссылки; заявкой на патент США № 13/716,313, озаглавленной «Круговой сшивающий инструмент с выбором управления с использованием электропривода и ручного управления, включающий управляющее кольцо», поданной 17 декабря 2012 г., описание которой включено в настоящий документ путем ссылки; заявкой на патент США № 13/716,318, озаглавленной «Круговой сшивающий инструмент с электроприводом, входным сигналом вращения и модульным концевым эффектором», поданной 17 декабря 2012 г., описание которой включено в настоящий документ путем ссылки; и/или заявкой на патент США № 13/176,323, озаглавленной «Круговой сшивающий инструмент с электроприводом, входным сигналом вращения и блокируемым гибким стволом», поданной 17 декабря 2012 г., описание которой включено в настоящий документ путем ссылки. Различные подходящие способы, в соответствии с которыми можно скомбинировать такие идеи, будут понятны обычным специалистам в данной области.
Хотя примеры представлены здесь в основном в контексте кругового хирургического сшивающего инструмента, следует понимать, что различные описанные в настоящем документе идеи могут быть легко применены к различным другим видам хирургических инструментов. Исключительно в качестве примера, различные идеи настоящего документа можно легко применить к линейным сшивающим устройствам (например, эндоскопическому режущему инструменту). Например, различные идеи, изложенные в настоящем документе, можно легко сочетать с различными идеями патентной публикации США № 2012/0239012, озаглавленной «Оснащенный двигателем хирургический режущий инструмент с электрическим узлом управления перемещением активатора», опубликованной 20 сентября 2012 г., описание которой включено в настоящий документ путем ссылки; и/или патентной публикации США № 2010/0264193, озаглавленной «Хирургический сшивающий инструмент с шарнирно-поворачиваемым концевым эффектором», опубликованной 21 октября 2010 г., описание которой включено в настоящий документ путем ссылки, как будет очевидно обычным специалистам в данной области. В качестве другого исключительно иллюстративного примера, различные идеи, изложенные в настоящем документе, можно легко применить к оснащенному электроприводом электрохирургическому устройству. Например, различные идеи, изложенные в настоящем документе, можно легко сочетать с различными идеями патентной публикации США № 2012/0116379, озаглавленной «Оснащенное двигателем электрохирургическое устройство с механической и электрической обратной связью», опубликованной 10 мая 2012 г., описание которой включено в настоящий документ путем ссылки, как будет очевидно обычным специалистам в данной области. Другие подходящие типы инструментов, в которых можно применить изложенные в настоящем документе идеи, и различные возможные способы применения изложенных идей к таким инструментам будут очевидны обычным специалистам в данной области.
Следует учитывать, что любой патент, публикация или другой материал описания, полностью или частично включенный в настоящий документ путем ссылки, включен в него только в той степени, в которой включенный материал не противоречит существующим определениям, заявлениям или другим материалам описания, представленным в настоящем описании. Таким образом, в необходимой степени описание, как явно представлено в настоящем документе, имеет преимущество перед любым противоречащим материалом, включенным в настоящий документ путем ссылки. Любой материал или его часть, указанный как включенный в настоящий документ путем ссылки, но противоречащий существующим определениям, положениям или другому материалу описания, представленному в настоящем документе, будет включен в настоящий документ только в той мере, в которой между включенным материалом и существующим материалом описания не возникает противоречий.
Варианты описанных выше устройств могут применяться в традиционных видах медицинского лечения и процедурах, выполняемых медицинским специалистом, а также в роботизированных видах медицинского лечения и процедурах. Только в качестве примера, различные идеи, представленные в настоящем документе, могут быть легко использованы в роботизированной хирургической системе, такой как система DAVINCI™, разработанная компанией Intuitive Surgical, Inc., г. Саннивейл, штат Калифорния, США.
Описанные выше варианты можно выполнить с возможностью утилизации после однократного применения, или их можно выполнить с возможностью многократного применения. В каждом либо в обоих случаях варианты можно восстановить для повторного применения после, по меньшей мере, одного применения. Восстановление может включать любую комбинацию этапов разборки устройства, затем очистки или замены конкретных фрагментов и последующей повторной сборки. В частности, некоторые варианты устройства можно разобрать, и любое число конкретных фрагментов или частей устройства можно избирательно заменить или удалить в любой комбинации. После очистки и/или замены конкретных частей некоторые варианты устройства можно повторно собрать для последующего применения либо в отделении, выполняющем восстановление, либо это может сделать сам пользователь непосредственно перед процедурой. Специалистам в данной области будет понятно, что восстановление устройства может включать различные методики разборки, очистки/замены и повторной сборки. Применение таких методик, а также полученное восстановленное устройство входят в объем настоящей заявки.
Только в качестве примера: описанные в настоящем документе варианты можно стерилизовать до и/или после процедуры. В одной методике стерилизации устройство помещают в закрытый и герметичный контейнер, такой как пластиковый пакет или пакет из материала «Тайвек» (TYVEK). Впоследствии контейнер и устройство можно поместить в поле излучения, которое может проникать в контейнер, такого как гамма-излучение, рентгеновское излучение или высокоэнергетический поток электронов. Излучение может убивать бактерии на устройстве и в контейнере. Впоследствии стерилизованное устройство можно хранить в стерильном контейнере для дальнейшего применения. Устройство также можно стерилизовать с применением любой другой методики, известной в данной области, включая, без ограничений, бета- или гамма-излучение, этиленоксид или пар.
Обычный специалист в данной области может осуществить различные показанные и описанные варианты осуществления настоящего изобретения, дополнительные адаптации способов и систем, описанных в настоящем документе, путем соответствующих модификаций без отступления от объема настоящего изобретения. Некоторые из таких потенциальных модификаций были упомянуты, а другие будут очевидны специалистам в данной области. Например, примеры, варианты осуществления, геометрические формы, материалы, размеры, коэффициенты, этапы и т. п., описанные выше, являются иллюстративными и не являются обязательными. Соответственно, объем настоящего изобретения следует рассматривать в свете представленной ниже формулы изобретения, и следует понимать, что он не ограничивается подробной информацией о конструкции и эксплуатации, показанной и описанной в описании и на чертежах.
Claims (40)
1. Хирургический сшивающий инструмент, содержащий:
(a) корпус;
(b) ствол, проходящий дистально из корпуса, причем ствол содержит проксимальный конец и дистальный конец;
(c) сшивающий узел, при этом сшивающий узел расположен на дистальном конце ствола, при этом сшивающий узел выполнен с возможностью избирательного перемещения из открытого положения в закрытое положение и при этом сшивающий узел выполнен с возможностью выталкивания множества скобок в ткань;
(d) двигатель;
(e) кулачковый узел, связанный с двигателем, при этом двигатель выполнен с возможностью вращения кулачкового узла; и
(f) пусковой узел, связанный с кулачковым узлом, причем пусковой узел выполнен с возможностью продольного перемещения, чтобы таким образом вызывать выталкивание множества скобок сшивающим узлом, при этом кулачковый узел выполнен с возможностью вращения для приведения в действие пускового узла в продольном направлении, и
причем кулачковый узел содержит представленную радиально внутрь кулачковую поверхность и представленную радиально наружу кулачковую поверхность, причем представленная радиально наружу кулачковая поверхность выполнена с возможностью приведения в движение пускового узла дистально в ответ на вращение кулачкового узла через первый диапазон углового перемещения, при этом представленная радиально внутрь кулачковая поверхность выполнена с возможностью приведения в движение пускового узла проксимально в ответ на вращение кулачкового узла через второй диапазон углового перемещения.
2. Инструмент по п. 1, в котором пусковой узел содержит плечо, находящееся в зацеплении с кулачковым узлом, причем плечо выполнено с возможностью продольного перемещения, чтобы таким образом вызывать продольное приведение в действие пускового узла.
3. Инструмент по п. 2, в котором кулачковый узел содержит цилиндрический кулачок.
4. Инструмент по п. 3, в котором цилиндрический кулачок содержит наклонную кулачковую поверхность.
5. Инструмент по п. 4, в котором пусковой узел дополнительно содержит ролик, находящийся в контакте с наклонной кулачковой поверхностью.
6. Инструмент по п. 4, в котором цилиндрический кулачок содержит наклонный кольцевой выступ, проходящий наружу от наружной поверхности цилиндрического кулачка.
7. Инструмент по п. 4, в котором цилиндрический кулачок содержит наклонный кольцевой канал, сформированный в пределах наружной поверхности цилиндрического кулачка.
8. Инструмент по п. 7, в котором плечо расположено с возможностью скольжения внутри наклонного кольцевого канала.
9. Инструмент по п. 1, в котором корпус содержит узел рукоятки, причем двигатель расположен в узле рукоятки.
10. Инструмент по п. 9, в котором узел рукоятки содержит пистолетную рукоятку, причем пистолетная рукоятка ориентирована наклонно относительно проксимального участка пускового узла и относительно проксимального конца ствола, при этом двигатель расположен внутри пистолетной рукоятки так, что двигатель ориентирован наклонно относительно проксимального участка пускового узла и относительно проксимального конца ствола.
11. Инструмент по п. 1, дополнительно содержащий поворотное плечо, присоединенное с возможностью вращения к корпусу, причем первый участок поворотного плеча находится в зацеплении с кулачковым узлом, при этом второй участок поворотного плеча находится в зацеплении с пусковым узлом, при этом кулачковый узел выполнен с возможностью вращения, чтобы вызывать вращение поворотного плеча, и при этом поворотное плечо выполнено с возможностью вращения, чтобы вызывать продольное приведение в действие пускового узла.
12. Инструмент по п. 11, в котором кулачковый узел содержит кулачок, имеющий канал, образованный в наружной поверхности кулачка.
13. Инструмент по п. 11, в котором кулачковый узел содержит канал кулачка, образованный в поверхности вращательного элемента.
14. Инструмент по п. 13, в котором первый участок поворотного плеча расположен с возможностью скольжения внутри канала кулачка.
15. Инструмент по п. 11, в котором кулачковый узел содержит кулачковый выступ, проходящий от поверхности вращательного элемента, причем первый участок поворотного плеча соединен с кулачковым выступом с возможностью скольжения.
16. Инструмент по п. 1, в котором кулачковый узел содержит, по меньшей мере, первый кулачок и второй кулачок.
17. Инструмент по п. 16, в котором пусковой узел содержит поворотное плечо, присоединенное с возможностью вращения к корпусу, причем первый участок поворотного плеча находится в зацеплении с первым кулачком, при этом второй участок поворотного плеча находится в зацеплении со вторым кулачком, при этом третий участок поворотного плеча находится в зацеплении с пусковым узлом, при этом кулачковый узел выполнен с возможностью вращения, чтобы вызывать вращение поворотного плеча, при этом поворотное плечо выполнено с возможностью вращения, чтобы вызывать продольное перемещение пускового узла.
18. Хирургический сшивающий инструмент, содержащий:
(a) корпус;
(b) ствол, проходящий дистально из корпуса, причем ствол содержит проксимальный конец и дистальный конец;
(c) сшивающий узел, при этом сшивающий узел расположен на дистальном конце ствола, при этом сшивающий узел выполнен с возможностью избирательного перемещения из открытого положения в закрытое положение и при этом сшивающий узел выполнен с возможностью выталкивания множества скобок в ткань;
(d) двигатель;
(e) кулачковый узел, связанный с двигателем, при этом двигатель выполнен с возможностью вращения кулачкового узла; и
(f) пусковой узел, причем пусковой узел выполнен с возможностью продольного перемещения, чтобы таким образом вызывать выталкивание множества скобок сшивающим узлом, при этом кулачковый узел выполнен с возможностью вращения для продольного перемещения пускового узла, при этом кулачковый узел выполнен с возможностью вращения на один оборот для приведения пускового узла в движение из проксимального положения в дистальное положение и обратно, либо в проксимальное положение, либо в другое положение, которое является проксимальным к дистальному положению, и
причем кулачковый узел содержит представленную радиально внутрь кулачковую поверхность и представленную радиально наружу кулачковую поверхность, причем представленная радиально наружу кулачковая поверхность выполнена с возможностью приведения в движение пускового узла дистально в ответ на вращение кулачкового узла через первый диапазон углового перемещения, при этом представленная радиально внутрь кулачковая поверхность выполнена с возможностью приведения в движение пускового узла проксимально в ответ на вращение кулачкового узла через второй диапазон углового перемещения.
19. Хирургический сшивающий инструмент, содержащий:
(a) корпус;
(b) ствол, проходящий дистально из корпуса, причем ствол содержит проксимальный конец и дистальный конец;
(c) сшивающий узел, при этом сшивающий узел расположен на дистальном конце ствола, при этом сшивающий узел выполнен с возможностью избирательного перемещения из открытого положения в закрытое положение, при этом сшивающий узел выполнен с возможностью выталкивания множества скобок в ткань;
(d) двигатель;
(e) кулачковый узел, связанный с двигателем, при этом двигатель выполнен с возможностью вращения кулачкового узла; и
(f) пусковой узел, причем пусковой узел содержит элемент зацепления, при этом элемент зацепления находится в зацеплении с кулачковым узлом, при этом пусковой узел выполнен с возможностью продольного перемещения, чтобы таким образом вызывать выталкивание множества скобок сшивающим узлом, при этом кулачковый узел выполнен с возможностью вызывать продольное поступательное перемещение пускового узла в двух продольных направлениях в ответ на один оборот кулачкового узла, и
причем кулачковый узел содержит представленную радиально внутрь кулачковую поверхность и представленную радиально наружу кулачковую поверхность, причем представленная радиально наружу кулачковая поверхность выполнена с возможностью приведения в движение пускового узла дистально в ответ на вращение кулачкового узла через первый диапазон углового перемещения, при этом представленная радиально внутрь кулачковая поверхность выполнена с возможностью приведения в движение пускового узла проксимально в ответ на вращение кулачкового узла через второй диапазон углового перемещения.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/033,688 | 2013-09-23 | ||
| US14/033,688 US20150083772A1 (en) | 2013-09-23 | 2013-09-23 | Surgical stapler with rotary cam drive and return |
| PCT/US2014/056514 WO2015042371A1 (en) | 2013-09-23 | 2014-09-19 | Surgical stapler with rotary cam drive and return |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| RU2016115744A RU2016115744A (ru) | 2017-10-30 |
| RU2016115744A3 RU2016115744A3 (ru) | 2018-05-21 |
| RU2676492C2 true RU2676492C2 (ru) | 2018-12-29 |
Family
ID=51570432
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2016115744A RU2676492C2 (ru) | 2013-09-23 | 2014-09-19 | Хирургический сшивающий инструмент с вращательным кулачковым приводом и возвратом |
Country Status (8)
| Country | Link |
|---|---|
| US (2) | US20150083772A1 (ru) |
| EP (1) | EP2851013B1 (ru) |
| JP (1) | JP6392358B2 (ru) |
| CN (1) | CN106061409B (ru) |
| BR (1) | BR112016006337B1 (ru) |
| MX (1) | MX2016003715A (ru) |
| RU (1) | RU2676492C2 (ru) |
| WO (1) | WO2015042371A1 (ru) |
Families Citing this family (96)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10729444B2 (en) | 2017-04-28 | 2020-08-04 | Ethicon Llc | Liquid-immune trigger circuit for surgical instrument |
| US10980542B2 (en) | 2016-11-14 | 2021-04-20 | Ethicon Llc | Circular surgical stapler with recessed deck |
| US9713469B2 (en) * | 2013-09-23 | 2017-07-25 | Ethicon Llc | Surgical stapler with rotary cam drive |
| US20150083772A1 (en) * | 2013-09-23 | 2015-03-26 | Ethicon Endo-Surgery, Inc. | Surgical stapler with rotary cam drive and return |
| US10709452B2 (en) * | 2013-09-23 | 2020-07-14 | Ethicon Llc | Methods and systems for performing circular stapling |
| US9907552B2 (en) | 2013-09-23 | 2018-03-06 | Ethicon Llc | Control features for motorized surgical stapling instrument |
| US10478189B2 (en) | 2015-06-26 | 2019-11-19 | Ethicon Llc | Method of applying an annular array of staples to tissue |
| US20180132849A1 (en) | 2016-11-14 | 2018-05-17 | Ethicon Endo-Surgery, Llc | Staple forming pocket configurations for circular surgical stapler anvil |
| US10695068B2 (en) | 2017-04-28 | 2020-06-30 | Ethicon Llc | Hysteresis removal feature in surgical stapling instrument |
| US9554802B2 (en) * | 2013-11-13 | 2017-01-31 | Covidien Lp | Anvil assembly with frangible retaining member |
| US9987001B2 (en) | 2015-06-12 | 2018-06-05 | Covidien Lp | Surgical anastomosis apparatus |
| US10188386B2 (en) | 2015-06-26 | 2019-01-29 | Ethicon Llc | Surgical stapler with anvil state indicator |
| US10271841B2 (en) | 2015-06-26 | 2019-04-30 | Ethicon Llc | Bailout assembly for surgical stapler |
| US10905415B2 (en) | 2015-06-26 | 2021-02-02 | Ethicon Llc | Surgical stapler with electromechanical lockout |
| US10271842B2 (en) | 2015-06-26 | 2019-04-30 | Ethicon Llc | Anvil stabilization features for surgical stapler |
| US10307157B2 (en) | 2015-06-26 | 2019-06-04 | Ethicon Llc | Surgical stapler with anvil seating detection |
| US10405855B2 (en) | 2015-06-26 | 2019-09-10 | Ethicon Llc | Firing circuit for surgical stapler |
| US10226253B2 (en) | 2015-06-26 | 2019-03-12 | Ethicon Llc | Firing assembly for circular stapler |
| US10265066B2 (en) | 2015-06-26 | 2019-04-23 | Ethicon Llc | Surgical stapler with incomplete firing indicator |
| US10456134B2 (en) | 2015-06-26 | 2019-10-29 | Ethicon Llc | Surgical stapler with reversible motor |
| US10517602B2 (en) | 2015-06-26 | 2019-12-31 | Ethicon Llc | Surgical stapler with reversible polarity |
| US10194911B2 (en) | 2015-06-26 | 2019-02-05 | Ethicon Llc | Surgical stapler with ready state indicator |
| US11191528B2 (en) * | 2015-07-09 | 2021-12-07 | DePuy Synthes Products, Inc. | External hand control for surgical power tool |
| PL236354B1 (pl) | 2015-07-31 | 2021-01-11 | Grena Ltd | Układ wskaźnika staplera okrężnego oraz stapler okrężny |
| PL236575B1 (pl) | 2015-07-31 | 2021-01-25 | Grena Ltd | Jednorazowa jednostka zespalająca |
| US10499909B2 (en) | 2015-09-24 | 2019-12-10 | Ethicon Llc | Apparatus and method for pleating a bodily lumen |
| US10485548B2 (en) | 2015-09-24 | 2019-11-26 | Ethicon Llc | Apparatus and method for forming a staple line with trocar passageway |
| US10307165B2 (en) | 2015-09-24 | 2019-06-04 | Ethicon Llc | Apparatus and method for radially bunching a bodily lumen |
| US10492790B2 (en) | 2015-09-24 | 2019-12-03 | Ethicon Llc | Apparatus and method for cinching a straight staple line |
| US9987013B2 (en) | 2015-09-24 | 2018-06-05 | Ethicon Llc | Surgical staple buttress with magnetic elements |
| US10542981B2 (en) | 2016-11-14 | 2020-01-28 | Ethicon Llc | Atraumatic stapling head features for circular surgical stapler |
| US10603041B2 (en) | 2016-11-14 | 2020-03-31 | Ethicon Llc | Circular surgical stapler with angularly asymmetric deck features |
| US10695060B2 (en) | 2017-09-01 | 2020-06-30 | RevMedica, Inc. | Loadable power pack for surgical instruments |
| US10966720B2 (en) | 2017-09-01 | 2021-04-06 | RevMedica, Inc. | Surgical stapler with removable power pack |
| US11331099B2 (en) | 2017-09-01 | 2022-05-17 | Rev Medica, Inc. | Surgical stapler with removable power pack and interchangeable battery pack |
| BR102019003934A2 (pt) * | 2018-03-07 | 2019-09-17 | Ethicon Llc | Grampeador cirúrgico com polaridade reversível |
| WO2020037649A1 (en) | 2018-08-24 | 2020-02-27 | Covidien Lp | Powered circular stapling device |
| US11701109B2 (en) | 2018-12-28 | 2023-07-18 | Cilag Gmbh International | Surgical stapler with sloped staple deck for varying tissue compression |
| US11259804B2 (en) | 2018-12-31 | 2022-03-01 | Cilag Gmbh International | Frame for surgical stapler and associated method of manufacture with stamping |
| US11607217B2 (en) | 2018-12-31 | 2023-03-21 | Cilag Gmbh International | Surgical stapler shaft formed of segments of different materials |
| US11141777B2 (en) | 2018-12-31 | 2021-10-12 | Cilag Gmbh International | Multi-piece jaw assembly for surgical clip applier |
| US11134941B2 (en) | 2018-12-31 | 2021-10-05 | Cilag Gmbh International | Cartridge receiving jaw for surgical stapler and associated method of manufacture with stamping |
| US11291450B2 (en) | 2018-12-31 | 2022-04-05 | Cilag Gmbh International | Anvil for circular surgical stapler and associated method of manufacture with MIM |
| US11103245B2 (en) | 2018-12-31 | 2021-08-31 | Cilag Gmbh International | Knife for surgical stapler and associated method of manufacture with MIM and hip |
| US11051809B2 (en) | 2018-12-31 | 2021-07-06 | Cilag Gmbh International | Cartridge receiving jaw for surgical stapler and associated method of manufacture with MIM |
| US11123075B2 (en) | 2019-03-08 | 2021-09-21 | Cilag Gmbh International | Circular surgical stapler |
| US11147559B2 (en) | 2019-03-08 | 2021-10-19 | Cilag Gmbh International | Staple height indicator for powered surgical stapler |
| US20200281593A1 (en) | 2019-03-08 | 2020-09-10 | Ethicon Llc | Power control circuit for powered surgical stapler |
| US11224432B2 (en) | 2019-03-08 | 2022-01-18 | Cilag Gmbh International | Timer circuit to control firing of powered surgical stapler |
| US11116508B2 (en) | 2019-03-08 | 2021-09-14 | Cilag Gmbh International | Electrical potential shifting circuit for powered surgical stapler |
| AU2019448247A1 (en) | 2019-05-31 | 2021-12-16 | Covidien Lp | Circular stapling device |
| US11564685B2 (en) | 2019-07-19 | 2023-01-31 | RevMedica, Inc. | Surgical stapler with removable power pack |
| US11185331B2 (en) | 2019-09-18 | 2021-11-30 | Cilag Gmbh International | Method for controlling end effector closure for powered surgical stapler |
| US11123074B2 (en) | 2019-09-18 | 2021-09-21 | Cilag Gmbh International | Method for controlling cutting member actuation for powered surgical stapler |
| US11464516B2 (en) | 2019-09-18 | 2022-10-11 | Cilag Gmbh International | Method for calibrating movements of actuated members of powered surgical stapler |
| US11185324B2 (en) | 2019-09-18 | 2021-11-30 | Cilag Gmbh International | Anvil retention and release features for powered circular surgical stapler |
| US11553918B2 (en) | 2019-12-16 | 2023-01-17 | Covidien Lp | Reload assembly with knife carrier lockout |
| US11730481B2 (en) | 2020-01-06 | 2023-08-22 | Covidien Lp | Assemblies for retaining a trocar assembly |
| US11911038B2 (en) | 2020-01-13 | 2024-02-27 | Covidien Lp | Cut optimization for excessive tissue conditions |
| US11523828B2 (en) | 2020-01-28 | 2022-12-13 | Covidien Lp | Sealed reload assembly for stapling device |
| US11622767B2 (en) | 2020-02-19 | 2023-04-11 | Covidien Lp | Sealed trocar assembly for stapling device |
| US11779343B2 (en) | 2020-02-26 | 2023-10-10 | Covidien Lp | Staple reload assembly with releasable knife |
| US11653925B2 (en) | 2020-05-21 | 2023-05-23 | Covidien Lp | Tissue relaxation monitoring for optimized tissue stapling |
| US11547405B2 (en) | 2020-05-22 | 2023-01-10 | Covidien Lp | Surgical stapling device |
| US11426171B2 (en) * | 2020-05-29 | 2022-08-30 | Cilag Gmbh International | Knife for circular surgical stapler |
| US11504128B2 (en) | 2020-05-29 | 2022-11-22 | Cilag Gmbh International | Shaft attachment feature for circular surgical stapler |
| US11737758B2 (en) | 2020-07-10 | 2023-08-29 | Cilag Gmbh International | Compression and firing force sensor for circular surgical stapler |
| US11490891B2 (en) | 2020-07-10 | 2022-11-08 | Cilag Gmbh International | Load sensor for circular surgical stapler |
| US11553921B2 (en) | 2020-07-15 | 2023-01-17 | Covidien Lp | Surgical stapling device with flexible shaft |
| US11627966B2 (en) | 2020-08-26 | 2023-04-18 | Covidien Lp | Surgical stapling device |
| US11801054B2 (en) | 2020-09-22 | 2023-10-31 | Covidien Lp | Surgical stapler with oval tool assembly |
| US11712509B2 (en) | 2020-10-02 | 2023-08-01 | Covidien Lp | Seal assembly for circular stapling instrument |
| US11627967B2 (en) | 2020-11-23 | 2023-04-18 | Covidien Lp | Trans-anastomotic insertion device |
| US11877750B2 (en) | 2021-01-21 | 2024-01-23 | Covidien Lp | Surgical stapler with powered and manual functions |
| US11786241B2 (en) | 2021-02-16 | 2023-10-17 | Covidien Lp | Surgical stapling device including a hydraulic staple formation mechanism |
| US11937892B2 (en) * | 2021-04-30 | 2024-03-26 | Cilag Gmbh International | Variable jaw closure of a robotic surgical system |
| US11553920B2 (en) | 2021-05-03 | 2023-01-17 | Covidien Lp | Trocar retainer assembly for surgical stapler |
| US11490894B1 (en) | 2021-05-12 | 2022-11-08 | Covidien Lp | Surgical device with grease filter |
| US11642131B2 (en) | 2021-05-17 | 2023-05-09 | Covidien Lp | Devices and methods for shortening a rectal stump during a lower anterior resection procedure |
| US11612400B2 (en) | 2021-05-24 | 2023-03-28 | Covidien Lp | Trocar assembly with bearing assembly for load sharing |
| US11737759B2 (en) | 2021-08-05 | 2023-08-29 | Covidien Lp | Surgical stapling device accommodating prolapsed tissue |
| US20230047471A1 (en) | 2021-08-13 | 2023-02-16 | Cilag Gmbh International | Staple forming features for circular surgical stapler |
| US11653926B2 (en) | 2021-08-13 | 2023-05-23 | Cilag Gmbh International | Circular surgical stapler for forming pattern of non-tangential staples |
| US11911039B2 (en) | 2021-08-13 | 2024-02-27 | Cilag Gmbh International | Circular surgical stapler having staples with expandable crowns |
| US11944310B2 (en) | 2021-08-13 | 2024-04-02 | Cilag Gmbh International | Non-circular end effector features for surgical stapler |
| US20230049352A1 (en) | 2021-08-13 | 2023-02-16 | Cilag Gmbh International | Circular surgical stapler end effector having staple line alignment feature |
| US11666339B2 (en) | 2021-08-13 | 2023-06-06 | Cilag Gmbh International | Circular surgical stapler for forming cross-pattern of staples |
| US11883028B2 (en) | 2021-09-08 | 2024-01-30 | Covidien Lp | Systems and methods for post-operative anastomotic leak detection |
| US11896231B2 (en) | 2021-09-10 | 2024-02-13 | Cilag Gmbh International | Coupling feature for circular surgical stapler end effector |
| US11937812B2 (en) | 2021-09-30 | 2024-03-26 | Cilag Gmbh International | Lockout feature for linear surgical stapler cartridge |
| US20230113766A1 (en) | 2021-09-30 | 2023-04-13 | Cilag Gmbh International | Staple driver and guide assembly for circular surgical stapler |
| US20230102965A1 (en) | 2021-09-30 | 2023-03-30 | Cilag Gmbh International | Circular surgical stapler with anastomosis release feature |
| US11786250B2 (en) | 2021-10-07 | 2023-10-17 | Cilag Gmbh International | Collar for securing circular surgical stapler end effector to shaft |
| US11717299B2 (en) | 2021-10-12 | 2023-08-08 | Covidien Lp | Surgical stapling device with probiotics |
| US20230117309A1 (en) | 2021-10-18 | 2023-04-20 | Cilag Gmbh International | Metal injection molded anvil for circular surgical stapler |
| US11896232B2 (en) | 2021-11-24 | 2024-02-13 | Cilag Gmbh International | Tissue stabilizing features for circular surgical stapler |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5628446A (en) * | 1994-05-05 | 1997-05-13 | United States Surgical Corporation | Self-contained powered surgical apparatus |
| EP1992296A1 (en) * | 2007-05-17 | 2008-11-19 | Tyco Healthcare Group, LP | Gear driven knife drive mechanism |
| EP2025293A1 (en) * | 2007-08-15 | 2009-02-18 | Tyco Healthcare Group LP | Surgical instrument with flexible drive mechanism |
| RU2009105055A (ru) * | 2008-02-14 | 2010-08-20 | Этикон Эндо-Серджери, Инк. (Us) | Хирургический сшивающий аппарат многократного использования (варианты) и способ его обработки (варианты) |
Family Cites Families (59)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2211741A (en) * | 1940-08-13 | elwell | ||
| DE2339190C3 (de) * | 1973-08-02 | 1979-03-15 | Gildemeister Ag, 4800 Bielefeld | Vorschubantrieb für Werkzeugquerschlitten an Werkzeugmaschinen, insbesondere an Mehrspindel-Drehautomaten |
| US4289041A (en) * | 1979-05-04 | 1981-09-15 | Valdespino Joseph M | Reciprocator for use with rotary drills |
| US4644952A (en) * | 1985-02-19 | 1987-02-24 | Palm Beach Medical Engineering, Inc. | Surgical operating instrument |
| US4805823A (en) | 1988-03-18 | 1989-02-21 | Ethicon, Inc. | Pocket configuration for internal organ staplers |
| US5333773A (en) | 1991-08-23 | 1994-08-02 | Ethicon, Inc. | Sealing means for endoscopic surgical anastomosis stapling instrument |
| US5350104A (en) | 1991-08-23 | 1994-09-27 | Ethicon, Inc. | Sealing means for endoscopic surgical anastomosis stapling instrument |
| GR920100358A (el) | 1991-08-23 | 1993-06-07 | Ethicon Inc | Οργανο συρραφής χειρουργικής αναστομώσεως. |
| US5415334A (en) | 1993-05-05 | 1995-05-16 | Ethicon Endo-Surgery | Surgical stapler and staple cartridge |
| US5337623A (en) * | 1993-09-15 | 1994-08-16 | Industrial Technology Research Institute | Automatic tool switching mechanism |
| US5465895A (en) | 1994-02-03 | 1995-11-14 | Ethicon Endo-Surgery, Inc. | Surgical stapler instrument |
| US5597107A (en) | 1994-02-03 | 1997-01-28 | Ethicon Endo-Surgery, Inc. | Surgical stapler instrument |
| US5632432A (en) | 1994-12-19 | 1997-05-27 | Ethicon Endo-Surgery, Inc. | Surgical instrument |
| US5704534A (en) | 1994-12-19 | 1998-01-06 | Ethicon Endo-Surgery, Inc. | Articulation assembly for surgical instruments |
| US5814055A (en) | 1995-09-19 | 1998-09-29 | Ethicon Endo-Surgery, Inc. | Surgical clamping mechanism |
| ATE183127T1 (de) * | 1995-12-22 | 1999-08-15 | G Lyle Habermehl | Kraftbetriebenes handwerkzeug mit ein, ausschalter in hinterem teil eines ergonomischen handgriffs |
| US6050472A (en) * | 1996-04-26 | 2000-04-18 | Olympus Optical Co., Ltd. | Surgical anastomosis stapler |
| US6021573A (en) * | 1997-05-15 | 2000-02-08 | Ryobi North America, Inc. | In-line oscillating cam assembly |
| JP4448569B2 (ja) * | 1999-01-28 | 2010-04-14 | デルタ工業株式会社 | 円運動を往復運動に変換するためのカム構造およびこのカム構造を用いたカム装置並びにこのカム装置を用いた刈込み機 |
| US6443973B1 (en) * | 1999-06-02 | 2002-09-03 | Power Medical Interventions, Inc. | Electromechanical driver device for use with anastomosing, stapling, and resecting instruments |
| US8025199B2 (en) * | 2004-02-23 | 2011-09-27 | Tyco Healthcare Group Lp | Surgical cutting and stapling device |
| US6471713B1 (en) * | 2000-11-13 | 2002-10-29 | Cardica, Inc. | System for deploying an anastomosis device and method of performing anastomosis |
| EP2397080B1 (en) * | 2001-04-03 | 2018-08-01 | Covidien LP | Surgical stapling device |
| US7247161B2 (en) * | 2002-03-22 | 2007-07-24 | Gyrus Ent L.L.C. | Powered surgical apparatus, method of manufacturing powered surgical apparatus, and method of using powered surgical apparatus |
| US7143923B2 (en) | 2003-05-20 | 2006-12-05 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a firing lockout for an unclosed anvil |
| US7380696B2 (en) | 2003-05-20 | 2008-06-03 | Ethicon Endo-Surgery, Inc. | Articulating surgical stapling instrument incorporating a two-piece E-beam firing mechanism |
| US6978921B2 (en) | 2003-05-20 | 2005-12-27 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating an E-beam firing mechanism |
| US7380695B2 (en) | 2003-05-20 | 2008-06-03 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having a single lockout mechanism for prevention of firing |
| US7434715B2 (en) | 2003-09-29 | 2008-10-14 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument having multistroke firing with opening lockout |
| US7303108B2 (en) | 2003-09-29 | 2007-12-04 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating a multi-stroke firing mechanism with a flexible rack |
| US7367485B2 (en) | 2004-06-30 | 2008-05-06 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating a multistroke firing mechanism having a rotary transmission |
| US8579176B2 (en) | 2005-07-26 | 2013-11-12 | Ethicon Endo-Surgery, Inc. | Surgical stapling and cutting device and method for using the device |
| US7959050B2 (en) * | 2005-07-26 | 2011-06-14 | Ethicon Endo-Surgery, Inc | Electrically self-powered surgical instrument with manual release |
| US7770775B2 (en) * | 2006-01-31 | 2010-08-10 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with adaptive user feedback |
| US20070175955A1 (en) * | 2006-01-31 | 2007-08-02 | Shelton Frederick E Iv | Surgical cutting and fastening instrument with closure trigger locking mechanism |
| US8348131B2 (en) | 2006-09-29 | 2013-01-08 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with mechanical indicator to show levels of tissue compression |
| US7721930B2 (en) | 2006-11-10 | 2010-05-25 | Thicon Endo-Surgery, Inc. | Disposable cartridge with adhesive for use with a stapling device |
| US7422136B1 (en) * | 2007-03-15 | 2008-09-09 | Tyco Healthcare Group Lp | Powered surgical stapling device |
| US20090270895A1 (en) * | 2007-04-06 | 2009-10-29 | Interlace Medical, Inc. | Low advance ratio, high reciprocation rate tissue removal device |
| US8408439B2 (en) | 2007-06-22 | 2013-04-02 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument with an articulatable end effector |
| US7922063B2 (en) | 2007-10-31 | 2011-04-12 | Tyco Healthcare Group, Lp | Powered surgical instrument |
| DE202009011312U1 (de) * | 2009-08-11 | 2010-12-23 | C. & E. Fein Gmbh | Handwerkzeug mit einem Oszillationsantrieb |
| US8220688B2 (en) | 2009-12-24 | 2012-07-17 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument with electric actuator directional control assembly |
| US8360296B2 (en) * | 2010-09-09 | 2013-01-29 | Ethicon Endo-Surgery, Inc. | Surgical stapling head assembly with firing lockout for a surgical stapler |
| US9161803B2 (en) | 2010-11-05 | 2015-10-20 | Ethicon Endo-Surgery, Inc. | Motor driven electrosurgical device with mechanical and electrical feedback |
| US20120264193A1 (en) | 2011-04-14 | 2012-10-18 | Rumiko Kuwana | Method for producing medium and medium produced thereby |
| US8746532B2 (en) | 2011-05-19 | 2014-06-10 | Ethicon Endo-Surgery, Inc. | Anvil and cartridge alignment configuration for a circular stapler |
| US9498222B2 (en) | 2012-11-29 | 2016-11-22 | Ethicon Endo-Surgery, Llc | Pivoting anvil for surgical circular stapler |
| US9289207B2 (en) | 2012-11-29 | 2016-03-22 | Ethicon Endo-Surgery, Llc | Surgical staple with integral pledget for tip deflection |
| US9724100B2 (en) | 2012-12-04 | 2017-08-08 | Ethicon Llc | Circular anvil introduction system with alignment feature |
| US9572573B2 (en) | 2012-12-04 | 2017-02-21 | Ethicon Endo-Surgery, Llc | Trans-oral circular anvil introduction system with dilation feature |
| US20140158747A1 (en) | 2012-12-06 | 2014-06-12 | Ethicon Endo-Surgery, Inc. | Surgical stapler with varying staple widths along different circumferences |
| US9463022B2 (en) | 2012-12-17 | 2016-10-11 | Ethicon Endo-Surgery, Llc | Motor driven rotary input circular stapler with lockable flexible shaft |
| US9597081B2 (en) | 2012-12-17 | 2017-03-21 | Ethicon Endo-Surgery, Llc | Motor driven rotary input circular stapler with modular end effector |
| US9532783B2 (en) | 2012-12-17 | 2017-01-03 | Ethicon Endo-Surgery, Llc | Circular stapler with selectable motorized and manual control, including a control ring |
| US9867612B2 (en) * | 2013-04-16 | 2018-01-16 | Ethicon Llc | Powered surgical stapler |
| US9907552B2 (en) * | 2013-09-23 | 2018-03-06 | Ethicon Llc | Control features for motorized surgical stapling instrument |
| US9713469B2 (en) * | 2013-09-23 | 2017-07-25 | Ethicon Llc | Surgical stapler with rotary cam drive |
| US20150083772A1 (en) * | 2013-09-23 | 2015-03-26 | Ethicon Endo-Surgery, Inc. | Surgical stapler with rotary cam drive and return |
-
2013
- 2013-09-23 US US14/033,688 patent/US20150083772A1/en not_active Abandoned
-
2014
- 2014-09-19 WO PCT/US2014/056514 patent/WO2015042371A1/en active Application Filing
- 2014-09-19 JP JP2016544011A patent/JP6392358B2/ja active Active
- 2014-09-19 MX MX2016003715A patent/MX2016003715A/es active IP Right Grant
- 2014-09-19 CN CN201480052189.7A patent/CN106061409B/zh active Active
- 2014-09-19 RU RU2016115744A patent/RU2676492C2/ru not_active IP Right Cessation
- 2014-09-19 BR BR112016006337-6A patent/BR112016006337B1/pt active IP Right Grant
- 2014-09-22 EP EP14185807.6A patent/EP2851013B1/en active Active
-
2018
- 2018-08-22 US US16/109,020 patent/US10959724B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5628446A (en) * | 1994-05-05 | 1997-05-13 | United States Surgical Corporation | Self-contained powered surgical apparatus |
| EP1992296A1 (en) * | 2007-05-17 | 2008-11-19 | Tyco Healthcare Group, LP | Gear driven knife drive mechanism |
| EP2025293A1 (en) * | 2007-08-15 | 2009-02-18 | Tyco Healthcare Group LP | Surgical instrument with flexible drive mechanism |
| RU2009105055A (ru) * | 2008-02-14 | 2010-08-20 | Этикон Эндо-Серджери, Инк. (Us) | Хирургический сшивающий аппарат многократного использования (варианты) и способ его обработки (варианты) |
Also Published As
| Publication number | Publication date |
|---|---|
| CN106061409B (zh) | 2019-05-31 |
| EP2851013B1 (en) | 2017-10-25 |
| RU2016115744A (ru) | 2017-10-30 |
| CN106061409A (zh) | 2016-10-26 |
| JP6392358B2 (ja) | 2018-09-19 |
| US20190053796A1 (en) | 2019-02-21 |
| RU2016115744A3 (ru) | 2018-05-21 |
| US20150083772A1 (en) | 2015-03-26 |
| JP2016530061A (ja) | 2016-09-29 |
| EP2851013A1 (en) | 2015-03-25 |
| BR112016006337A2 (pt) | 2017-08-01 |
| MX2016003715A (es) | 2016-08-18 |
| US10959724B2 (en) | 2021-03-30 |
| BR112016006337B1 (pt) | 2022-02-08 |
| WO2015042371A1 (en) | 2015-03-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2676492C2 (ru) | Хирургический сшивающий инструмент с вращательным кулачковым приводом и возвратом | |
| RU2670698C9 (ru) | Хирургический сшивающий инструмент с вращательным кулачковым приводом | |
| RU2677085C2 (ru) | Хирургический сшивающий инструмент с узлом привода, имеющим коленно-рычажные элементы | |
| RU2670699C9 (ru) | Элементы управления хирургическим сшивающим инструментом с электроприводом | |
| US10835254B2 (en) | Powered surgical circular stapler | |
| RU2661719C2 (ru) | Круговой сшивающий инструмент с двигателем, входным сигналом вращения и блокируемым гибким стволом | |
| RU2728508C1 (ru) | Хирургический сшивающий инструмент с отсоединением ствола, механизированным запуском и механизированным шарнирным сочленением | |
| RU2675661C2 (ru) | Элементы установки для кассеты концевого эффектора хирургического инструмента | |
| RU2659019C2 (ru) | Привод шарнира концевого эффектора хирургического инструмента с шестерней и противостоящими рейками | |
| EP3395266B1 (en) | Hysteresis removal feature in surgical stapling instrument | |
| RU2676516C2 (ru) | Хирургический инструмент с блокировкой шарнира, имеющей двойную стопорную пружину | |
| RU2673376C2 (ru) | Круговой сшивающий инструмент, имеющий исполнительный механизм от двигателя и вход вращения, с модульным концевым эффектором | |
| RU2618953C2 (ru) | Конструктивный элемент для повторного входа в зацепление предохранительного переключателя сшивающего ткань аппарата | |
| JP2016530059A5 (ru) | ||
| JP2018508278A (ja) | 外科用器具用の万能ハンドル | |
| JP2017501807A (ja) | 別個かつ異なる閉鎖システムおよび発射システムを有する関節接合可能な外科用器具 | |
| JP7313844B2 (ja) | 反転可能な極性を有する外科用ステープラ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20200920 |