RU2018103C1 - Устройство для измерения кинематических характеристик гусеничной машины - Google Patents
Устройство для измерения кинематических характеристик гусеничной машины Download PDFInfo
- Publication number
- RU2018103C1 RU2018103C1 SU4920647A RU2018103C1 RU 2018103 C1 RU2018103 C1 RU 2018103C1 SU 4920647 A SU4920647 A SU 4920647A RU 2018103 C1 RU2018103 C1 RU 2018103C1
- Authority
- RU
- Russia
- Prior art keywords
- rotation
- horizontal
- rod
- fixed
- sensor
- Prior art date
Links
- 238000005259 measurement Methods 0.000 abstract description 5
- 238000004642 transportation engineering Methods 0.000 abstract description 2
- 239000000126 substance Substances 0.000 abstract 1
- 238000010586 diagram Methods 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
Images
Landscapes
- Vehicle Body Suspensions (AREA)
Abstract
Использование: в транспортном машиностроении для исследования движения гусеничных машин. Сущность изобретения: измерительное колесо 6 установлено на горизонтальной оси 7, смонтированной на тяге 1, закрепленной шарнирно на корпусе гусеничной машины с помощью кронштейна 3, между тягой 1 и корпусом установлена пружина 8, закрепленная одним концом на вертикальной оси вращения тяги 1, а другим - на тяге. 1 з.п. ф-лы, 3 ил.
Description
Изобретение относится к транспортному машиностроению и может быть использовано при исследовании движения гусеничных машин.
Известно устройство для измерения кинематических характеристик гусеничной машины, содержащее тягу, соединенную одним концом со скрепленным с корпусом гусеничной машины кронштейном посредством двухстепенного шарнира с горизонтальной и вертикальной осями вращения, измерительное колесо для взаимодействия с опорной поверхностью с горизонтальной осью вращения, закрепленное на другом конце тяги, пружину, закрепленную одним концом на тяге, установленный на измерительном колесе импульсный датчик частоты вращения измерительного колеса, датчики углов поворота тяги в горизонтальной и вертикальной плоскостях, имеющие неподвижные исполнительные элементы и подвижные чувствительные элементы, последние из которых соединены соответственно с вертикальной и горизонтальной осями двухстепенного шарнира, и блок регистрации, к входам которого подключены упомянутые датчики [1].
Это устройство позволяет измерить ряд кинематических характеристик гусеничной машины, но имеет следующие недостатки: низкую достоверность из-за деформации пружины при вертикальном перемещении колеса. Так как один конец пружины закреплен к тяге, а другой - к кронштейну, скрепленному с корпусом гусеничной машины, то при повороте последней появляется составляющая усилия пружины, которая стремится сместить тягу с колесом в боковом направлении. Такое смещение приводит к боковому уводу колеса и, следовательно, снижению точности измерений. Устройство обладает малыми функциональными возможностями, не позволяет определить основные характеристики поворота гусеничной машины - угловую скорость поворота, скорости буксования гусениц, радиус поворота и смещение полюса поворота, так как для определения последних необходимо измерить скорости и выявить траектории движения обоих (забегающего и отстающего) бортов гусеничной машины.
Цель изобретения - повышение точности измерений и расширение функциональных возможностей.
Достигается это тем, что в устройстве для измерения кинематических характеристик машины, содержащем тягу, соединенную одним концом со скрепленным с корпусом гусеничной машины кронштейном посредством двухстепенного шарнира с горизонтальной и вертикальной осями вращения, измерительное колесо для взаимодействия с опорной поверхностью с горизонтальной осью вращения, закрепленное на другом конце тяги, пружину, закрепленную одним концом на тяге, установленный на измерительном колесе импульсный датчик частоты вращения измерительного колеса, датчики углов поворота тяги в горизонтальной и вертикальной плоскостях, имеющие неподвижные исполнительные элементы и подвижные чувствительные элементы, последние из которых соединены соответственно с вертикальной и горизонтальной осями двухстепенного шарнира, и блок регистрации, к входам которого подключены упомянутые датчики, согласно изобретению другим концом пружина закреплена на вертикальной оси шарнира, причем неподвижный исполнительный элемент датчика угла поворота тяги в горизонтальной плоскости закреплен на кронштейне, а неподвижный исполнительный элемент датчика угла поворота тяги в вертикальной плоскости закреплен на тяге, при этом на горизонтальной оси измерительного колеса установлены тензодатчики, через усилитель подключенные к блоку регистрации.
Кроме того, устройство снабжено установленным на вертикальной оси шарнира и подключенным к блоку регистрации гироскопическим датчиком угловой скорости, дополнительным кронштейном, двухстепенным шарниром, тягой, измерительным колесом, датчиками углов поворота тяги в горизонтальной и вертикальной плоскостях, импульсным датчиком частоты вращения, выполненными, установленными и связанными между собой аналогично первым, причем оба кронштейна закреплены симметрично друг другу по обе стороны от продольной оси машины, а вертикальные оси двухстепенных шарниров расположены на одной прямой, перпендикулярной продольной оси машины.
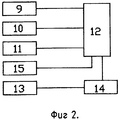
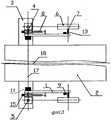
На фиг.1 изображено устройство, вид сбоку; на фиг.2 - структурная схема измерительного комплекса; на фиг.3 - то же, вид сверху.
Устройство содержит тягу 1, соединенную одним концом со скрепленным с корпусом 2 гусеничной машины кронштейном 3 посредством двухстепенного шарнира с горизонтальной 4 и вертикальной 5 осями вращения; колесо 6, шарнирно установленное на дополнительной горизонтальной оси 7, смонтированной на другом конце тяги 1, пружину 8, закрепленную одним концом к тяге 1, импульсный датчик 9 частоты вращения колеса 6, первый датчик 10 угла поворота, подвижная часть которого соединена с вертикальной осью 5 вращения, второй датчик 11 угла поворота, подвижная часть которого соединена с горизонтальной осью 4 вращения , блок регистрации 12, к входам которого подключены упомянутые датчики 9, 10, 11. Свободный конец пружины 8 прикреплен к вертикальной оси 5 вращения, корпус первого датчика 10 угла поворота закреплен на кронштейне 3, корпус второго датчика 11 угла поворота закреплен на тяге 1, дополнительная горизонтальная ось 7 выполнена тензометрической, а соответствующие тензодатчики 13 подключены к усилителю 14, выход которого подключен к входу блока регистрации 12. Устройство снабжено гироскопическим датчиком 15 угловой скорости, скрепленным с вертикальной осью 5 вращения, выход которого подключен к входу блока регистрации 12 и установлено по обоим бортам гусеничной машины так, что точки пересечения вертикальных осей 5 вращения с опорной поверхностью 16 располагаются на одной линии 17, перпендикулярной продольной оси 18 гусеничной машины.
Работает устройство следующим образом. При движении гусеничной машины импульсный датчик 9 вырабатывает последовательность импульсов, частота следования которых пропорциональна скорости движения соответствующего борта гусеничной машины, первый датчик 10 угла поворота вырабатывает сигнал, пропорциональный углу поворота, и характеризует траекторию движения соответствующего борта, второй датчик 11 - сигнал, определяющий профиль опорной поверхности 16, тензодатчики 13, расположенные на дополнительной горизонтальной оси 7, сигнал, пропорциональный усилию прижатия колеса 6 к опорной поверхности 16, датчик 15 угловой скорости - сигнал, пропорциональный угловой скорости поворота. Сигналы с датчиков 9, 10, 11 и 15 непосредственно поступают на входы блока регистрации 12. Сигнал с тензодатчиков 13 вначале усиливается с помощью усилителя 14, а затем также поступают на вход блока регистрации 12. Датчики 9, 10, 11 и 15, усилитель 14 и блок-регистрации 12 запитываются от источников стабилизированного напряжения (условно не показаны).
Измерение усилия прижатия колеса 6 к опорной поверхности 16 позволяет учесть изменение радиуса качения колеса 6 и повысить точность определения скорости движения. Так как один конец пружины закреплен к тяге 1, а другой - к вертикальной оси 5 вращения, то исключается боковой увод колеса 6 при поворота гусеничной машины и повышается точность измерения траектории движения. Введение датчика 15 угловой скорости позволяет определить угловую скорость поворота. Установка устройства на левом и правом бортах позволяет измерить скорости и выявить траектории движения обоих (забегающего и отстающего) бортов, что позволяет после обработки результатов измерения определить ряд основных кинематических характеристик криволинейного движения (поворота) гусеничной машины - радиус поворота, смещение полюса поворота и скорости буксования гусениц.
Claims (2)
1. УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КИНЕМАТИЧЕСКИХ ХАРАКТЕРИСТИК ГУСЕНИЧНОЙ МАШИНЫ, содержащее тягу, соединенную одним концом со скрепленным с корпусом гусеничной машины кронштейном посредством двухстепенного шарнира с горизонтальной и вертикальной осями вращения, измерительное колесо для взаимодействия с опорной поверхностью с горизонтальной осью вращения, закрепленное на другом конце тяги, пружину, закрепленную одним концом на тяге, установленный на измерительном колесе импульсный датчик частоты вращения измерительного колеса, датчики углов поворота тяги в горизонтальной и вертикальной плоскостях, имеющие неподвижные исполнительные элементы и подвижные чувствительные элементы, последние из которых соединены соответственно с вертикальной и горизонтальной осями двухстепенного шарнира, и блок регистрации, к входам которого подключены упомянутые датчики, отличающееся тем, что другим концом пружина закреплена на вертикальной оси шарнира, причем неподвижный исполнительный элемент датчика угла поворота тяги в горизонтальной плоскости закреплен на кронштейне, а неподвижный исполнительный элемент датчика угла поворота тяги в вертикальной плоскости закреплен на тяге, при этом на горизонтальной оси измерительного колеса установлены тензодатчики, через усилитель подключенные к блоку регистрации.
2. Устройство по п.1, отличающееся тем, что оно снабжено установленным на вертикальной оси шарнира и подключенным к блоку регистрации гироскопическим датчиком угловой скорости, дополнительным кронштейном, двухстепенным шарниром, тягой, измерительным колесом, датчиками углов поворота тяги в горизонтальной и вертикальной плоскостях, импульсным датчиком частоты вращения, выполненными, установленными и связанными между собой аналогично первым, причем оба кронштейна закреплены симметрично друг другу по обе стороны от продольной оси машины, а вертикальные оси двухстепенных шарниров расположены на одной прямой, перпендикулярной продольной оси машины.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SU4920647 RU2018103C1 (ru) | 1991-03-19 | 1991-03-19 | Устройство для измерения кинематических характеристик гусеничной машины |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SU4920647 RU2018103C1 (ru) | 1991-03-19 | 1991-03-19 | Устройство для измерения кинематических характеристик гусеничной машины |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU2018103C1 true RU2018103C1 (ru) | 1994-08-15 |
Family
ID=21565876
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| SU4920647 RU2018103C1 (ru) | 1991-03-19 | 1991-03-19 | Устройство для измерения кинематических характеристик гусеничной машины |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2018103C1 (ru) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2171461C1 (ru) * | 1999-12-15 | 2001-07-27 | ФПГ "Сибагромаш" | Способ определения координат машинно-тракторного агрегата на поле и устройство для его осуществления |
-
1991
- 1991-03-19 RU SU4920647 patent/RU2018103C1/ru active
Non-Patent Citations (1)
| Title |
|---|
| Авторское свидетельство СССР N 1323898, кл. G 01M 17/00, 1987. * |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2171461C1 (ru) * | 1999-12-15 | 2001-07-27 | ФПГ "Сибагромаш" | Способ определения координат машинно-тракторного агрегата на поле и устройство для его осуществления |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6419240B1 (en) | Vehicle roll control | |
| US6588769B2 (en) | Vehicle roll control | |
| US4951198A (en) | Friction detecting device for vehicles | |
| JPH0249136A (ja) | 車両特に自動車などにおける横風の影響を測定する装置 | |
| JP3285257B2 (ja) | 自動車の後退走行の検出方法 | |
| KR920002019B1 (ko) | 캐터필러 차량의 운동 결정 시스템 | |
| EP1031814A4 (en) | ANGULAR SPEED SENSOR | |
| JPH09152389A (ja) | ショックアブソーバの減衰力測定装置 | |
| RU2018103C1 (ru) | Устройство для измерения кинематических характеристик гусеничной машины | |
| US5801507A (en) | Acceleration sensor | |
| JP2689357B2 (ja) | 相対方位検出方式 | |
| JP3219204B2 (ja) | 路面凹凸計測車 | |
| US20080263881A1 (en) | Dynamic percent grade measurement device | |
| JPH109877A (ja) | 車速検出システム及びそれを用いたナビゲーション装置 | |
| JPS63145118A (ja) | スタビライザの捩れ量検出装置 | |
| JPH0536219B2 (ru) | ||
| JPH0921650A (ja) | 移動体の状態検出装置 | |
| JP3244619B2 (ja) | 移動体の状態判定装置 | |
| SU1014783A1 (ru) | Устройство дл определени пространственных перемещений кузова рельсового транспортного средства | |
| CN212267421U (zh) | 一种车辆防侧翻装置 | |
| JPH06344942A (ja) | ホイールアライメント計測方法およびその装置 | |
| KR200164499Y1 (ko) | 자동차의 외관치수 측정로봇 | |
| SU1717994A1 (ru) | Динамометрическое устройство дл испытаний транспортного средства | |
| KR0184748B1 (ko) | 타이어 휠의 슬립 앵글 측정 방법 | |
| SU1415111A1 (ru) | Устройство дл определени параметров траектории движени колесного транспортного средства |