KR20220146594A - 방사상 가스 커튼 및/또는 내부 볼륨 제어를 갖는 웨이퍼 핸들링 로봇 - Google Patents
방사상 가스 커튼 및/또는 내부 볼륨 제어를 갖는 웨이퍼 핸들링 로봇 Download PDFInfo
- Publication number
- KR20220146594A KR20220146594A KR1020227033506A KR20227033506A KR20220146594A KR 20220146594 A KR20220146594 A KR 20220146594A KR 1020227033506 A KR1020227033506 A KR 1020227033506A KR 20227033506 A KR20227033506 A KR 20227033506A KR 20220146594 A KR20220146594 A KR 20220146594A
- Authority
- KR
- South Korea
- Prior art keywords
- turret
- gas
- radial
- base
- axis
- Prior art date
Links
Images








Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67766—Mechanical parts of transfer devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/0095—Manipulators transporting wafers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/02—Arms extensible
- B25J18/04—Arms extensible rotatable
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0075—Means for protecting the manipulator from its environment or vice versa
- B25J19/0079—Means for protecting the manipulator from its environment or vice versa using an internal pressure system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0075—Means for protecting the manipulator from its environment or vice versa
- B25J19/0083—Means for protecting the manipulator from its environment or vice versa using gaiters
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67017—Apparatus for fluid treatment
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68707—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a robot blade, or gripped by a gripper for conveyance
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Manipulator (AREA)
Abstract
수직 병진 (vertical translation) 을 위해 구성된 웨이퍼 핸들링 로봇들로부터 미립자 오염을 감소시키거나 제거하기 위한 시스템들 및 기법들이 개시된다. 이러한 일 기법에서, 이를 통해 웨이퍼 핸들링 로봇의 터렛 (turret) 이 연장될 수도 있거나 후퇴될 (retract) 수도 있는 어퍼처 (aperture) 를 갖는 칼라 (collar) 가 제공될 수도 있다. 칼라는 하나 이상의 방사상 가스 통로들을 가질 수도 있다. 방사상 통로(들)로부터 터렛으로 지향된 가스는 터렛과 부딪칠 때 하향으로 회전할 수도 있고 그리고 웨이퍼 핸들링 로봇의 베이스 내로부터 가스가 어퍼처를 통해 탈출하는 것을 방지하거나 억제하도록 작용할 수도 있다. 또 다른 기법에서, 터렛 및 벨로우즈 (bellows) 에 의해 점유된 베이스의 볼륨이 일반적으로 베이스로부터 터렛이 연장되는 정도와 무관하게 고정되도록 벨로우즈가 터렛의 하단 및 베이스의 하단에 부착될 (affix) 수도 있다.
Description
반도체 프로세싱 툴들은 종종 반도체 프로세싱 툴의 일부인 대형 챔버 또는 연결 통로 (vestibule) 이고, 일반적으로 일 측면 상에, 반도체 프로세싱 툴들 사이에서 웨이퍼들을 벌크로, 예를 들어, 한번에 25 개 이송하는데 사용되는 FOUP들 (front-opening unified pods) 을 수용하기 위한 로드 포트들을 제공하는 EFEM (equipment front-end module) 을 사용한다. EFEM들은 또한 일반적으로 로드 포트들에 반대편 측면 상에, 웨이퍼들을 이송 챔버 또는 프로세싱 챔버 내로 도입하기 위한 하나 이상의 로드 록들 또는 다른 인터페이스들을 가질 수도 있다. 웨이퍼 핸들링 로봇은 통상적으로 로드 포트들과 로드 록들 사이뿐만 아니라 EFEM의 잠재적으로 다른 스테이션들, 예를 들어, 웨이퍼 정렬기들 (aligners) 사이에서 웨이퍼들을 이송하기 위해 EFEM 내에 위치된다.
EFEM들에 사용된 웨이퍼 핸들링 로봇들은 종종 웨이퍼들을, 관절형 암들 (articulated arms) 이 부착된 암 링크들 (arm links) 에 대해 회전하도록 각각 구성된 암 링크들을 갖는 관절형 암들을 통해, 수평으로, 그리고 예를 들어, 전체 로봇 암 어셈블리를 상승시키거나 하강시키는 선형 병진 (linear translation) 메커니즘을 통해 수직으로 이동시키는 능력을 포함한다.
예를 들어, 상승된 수분 레벨들을 갖는 환경 또는 염소, 불소, 또는 다른 부식성 물질과 같은 하나 이상의 가스들이 존재하는 환경과 같이, 내부에 부식성 환경을 가질 수도 있는 것과 같은, 특정한 타입들의 EFEM들에서 사용하기에 특히 적합한 개선된 웨이퍼 핸들링 로봇 구성들이 본 명세서에 제시된다.
PCT 신청 양식은 본 출원의 일부로서 본 명세서와 동시에 제출되었다. 본 출원이 동시에 제출된 PCT 신청 양식에서 식별된 바와 같이 우선권 또는 이익을 주장하는 출원 각각은 전체가 모든 목적들을 위해 참조로서 본 명세서에 인용된다.
본 명세서에 기술된 주제의 하나 이상의 구현 예들의 세부사항들은 첨부된 도면들 및 이하의 기술 (description) 에 제시된다. 다른 특징들, 양태들 및 이점들은 기술, 도면들 및 청구항으로부터 명백해질 것이다.
본 발명자들은 개선된 웨이퍼 핸들링 로봇을 제공하기 위해 단독으로 (in isolation) 또는 협력하여 (in tandem) 사용될 수도 있는 적어도 2 개의 상이한 메커니즘들을 구상하였다. 두 메커니즘들 모두 웨이퍼 핸들링 로봇의 수직 (z-축) 운동으로부터 발생하는 미립자 오염 가능성을 감소시킨다.
z-축 능력을 갖는 웨이퍼 핸들링 로봇들은 통상적으로 챔버 또는 이들 (예를 들어, EFEM (equipment front-end module); 이러한 구조체들은 본 명세서에서 단순히 챔버들로 지칭될 수도 있지만, 이는 또한 EFEM들도 포함하는 것으로 이해되어야 한다) 을 지지하는 구조체에 대해 고정될 수도 있는 베이스, 터렛 (turret) 으로 하여금 베이스에 대해 수직으로 이동되게 하는 방식으로 베이스에 장착된 터렛 및 터렛에 의해 지지되고 터렛 내에 위치된 모터들에 의해 작동되는 하나 이상의 로봇 암들 (arms) 을 포함한다. 웨이퍼 핸들링 로봇이 가장 낮은 수직 위치에 있을 때 터렛은 통상적으로 대체로 베이스 내에 포함되고 그리고 상승된 (raised) 위치로 상승될 (elevate) 때 베이스의 개구부를 통해 베이스로부터 상승할 (rise up) 수도 있다. 본 발명자들은 터렛을 하강시키는 것 또는 상승시키는 것 각각으로, 베이스 내에서 터렛의 변위로 인해 공기 (또는 챔버 내에 존재하는 모든 분위기) 가 베이스로부터 강제로 빠져 나오거나 베이스 내로 인출될 (draw) 것이기 때문에, 베이스에 대한 터렛의 수직 운동이 미립자 오염원이라고 결정하였다. 예를 들어, 직경이 8 인치이고 18 인치의 수직 이동을 갖는 터렛에 대해, 터렛이 이동함에 따라 1/2 입방 피트 이상 볼륨을 변위시킬 수도 있다.
이러한 변위는 웨이퍼 핸들링 로봇이 로봇 암을 하강시키도록 작동될 때, 베이스 내에 위치된 가스로 하여금 챔버 또는 유사한 구조의 웨이퍼들을 둘러싸는 주변 환경으로 방출되게 할 수도 있고, 이는 베이스 내의 장비로부터 유래된 미립자들로 하여금 챔버로 방출되도록 할 수도 있고, 챔버 내에 있을 수도 있는 웨이퍼들과 콘택트할 (contact) 수도 있고 웨이퍼들을 오염시킬수도 있다. 이러한 변위는 또한 웨이퍼 핸들링 로봇이 로봇 암을 상승시키도록 작동될 때 공기로 하여금 챔버 내로부터 웨이퍼 핸들링 로봇의 베이스 내로 인출되게 할 수도 있고, 이는 부식성 가스들이 존재하는 챔버들에 문제들을 제시할 수도 있다. 이러한 부식성 가스들은 베이스 내부의 컴포넌트들, 예를 들어, 베어링들, 모터들, 전기 케이블들, 등을 손상시킬 수도 있고, 이는 웨이퍼 핸들링 로봇의 성능 또는 동작성에 영향을 줄 수도 있다. 이러한 부식은 또한 웨이퍼 핸들링 로봇의 운동으로 인해 웨이퍼가 미립자 오염을 겪을 가능성을 증가시킬 수도 있는, 추가의 미립자 생성을 발생시킬 수도 있다는 것이 인식되었다.
본 발명자들은 이러한 웨이퍼 핸들링 로봇들의 터렛 변위에 기인하는 미립자 오염을 완화시키거나 제거하기 위해 상기 기술된 것들과 같은 웨이퍼 핸들링 로봇들에 사용될 수도 있는 2 개의 미립자 완화 기술들을 구상하였다.
제 1 기술은 베이스의 상단부 근방의 위치에서 터렛 둘레에 완전히 연장하는 방사상 가스 커튼을 제공하는 칼라 (collar) 또는 다른 구조체이다. 방사상 가스 커튼은 상대적으로 작은 갭 (gap) 에 걸쳐 터렛을 향해 얇은 방사상 공기 스트림 (또는 질소와 같은 다른 가스) 을 전달할 수도 있다. 이 가스 커튼은, 갭을 브리지한 (bridge) 후, 터렛의 측면에 부딪치고 일반적으로 수직 방향들로 흐르도록 회전한다; 이 공기 중 일부는 웨이퍼 핸들링 로봇의 베이스 내로 흐르고 그리고 나머지 공기는 챔버 내로 흐른다. 베이스 내로 흐르는 공기의 부분은 가스 커튼의 위치에서 베이스로부터 흐르려고 할 수도 있는 공기의 모든 흐름에 맞서 (against) 밀어내거나 막아내는 (counter) 경향이 있고, 이에 따라 이러한 공기에 동반될 수도 있는 모든 미립자들을 베이스 내에 남게 할 것이다. 베이스 내로 흐르는 공기의 부분은 또한 (베이스가 베이스와 주변 환경 사이에 양압차를 발생되게 할만큼 충분히 작게 사이징된 (sized), 이러한 가스가 빠져 나가게 (escape) 하는 배기 벤트들 (vents) 을 갖는다면) 베이스 내 내부 압력을 상승시키는 경향이 있을 수도 있다. 챔버에 대한 베이스의 발생되는 양압은 가스 커튼의 위치 이외의 위치들에서 부식성 원소들이 베이스로 들어가는 것을 방지할 수도 있다. 칼라 또는 다른 구조체로부터 그리고 챔버 내로 흐르는 공기의 부분은 가스 커튼의 위치에서 베이스 내로 흐르려고 할 수도 있는 모든 공기의 흐름에 맞서 밀어내거나 막아내는 경향이 있고, 이에 따라 이러한 공기에 동반될 수도 있는 모든 부식성 원소들을 챔버 내에 남게 할 것이다. 본 명세서에서 "공기"에 대한 빈번한 참조가 이루어지지만, 앞서 논의된 바와 같이, 다른 가스들, 예를 들어 질소가 이 공기 대신 사용될 수도 있다는 것이 이해될 것이다.
제 2 기술은 일 단부 상에서 터렛의 하단 단부에 그리고 다른 단부 상에서 베이스에 부착될 (affix) 수도 있는 벨로우즈 (bellows) 유닛이다. 따라서, 벨로우즈 유닛은 터렛이 상승될 때 베이스의 내부 볼륨 내로 확장할 수도 있고 그리고 터렛이 하강될 때 압축될 수도 있다. 벨로우즈는 베이스에 대한 터렛의 수직 위치와 무관하게 베이스 내의 자유 볼륨이 일반적으로 일정하게 유지되게 하도록 작용할 수도 있다. 그 결과, 베이스에 대한 터렛의 수직 운동으로 인한 베이스로부터 공기의 변위가 거의 없을 수도 있거나 전혀 없을 수도 있다. 벨로우즈는 또한 챔버의 주변 환경으로부터의 잠재적으로 부식성 공기가 하단부로부터 베이스 내로 인출되는 것을 방지하도록 작용할 수도 있다.
기술 각자가 그 자체로 미립자 오염의 가능성 또는 심각도를 감소시킬 수도 있지만, 두 기술들을 사용하는 것은 챔버 내에서 웨이퍼 핸들링 로봇 수직 이동 시스템의 미립자 생성 레이트가 사실상 없게, 예를 들어, 72 분 윈도우에서 10 미만의 입자들로 감소되게 할 수도 있는 시너지 효과를 가질 수도 있다.
일부 구현 예들에서, 하나 이상의 로봇 암들, 하나 이상의 로봇 암들을 지지하는 터렛, 터렛을 지지하는 선형 병진 (linear translation) 메커니즘 및 선형 병진 메커니즘을 지지하는 베이스를 포함하는 장치가 제공될 수도 있다. 이러한 장치에서, 선형 병진 메커니즘은 베이스에 대해 제 1 축을 따라, 터렛뿐만 아니라 하나 이상의 로봇 암들을 병진하도록 구성될 수도 있고, 베이스는 터렛이 제 1 축을 따라 병진될 때 터렛의 적어도 제 1 부분으로 하여금 이를 통해 통과하게 하도록 사이징된 (sized) 어퍼처 (aperture) 를 포함할 수도 있고, 어퍼처는 실질적으로 모든 어퍼처 둘레로 연장하는 하나 이상의 방사상 가스 통로들을 가질 수도 있고, 하나 이상의 방사상 가스 통로들은 사이즈가 고정될 수도 있고, 제 1 갭이 어퍼처의 내부 에지와 터렛의 제 1 부분 사이에 존재할 수도 있고 그리고 제 1 갭은 터렛의 제 1 부분의 외측 주변부 둘레로 연장할 수도 있다.
장치의 일부 구현 예들에서, 터렛의 제 1 부분과 어퍼처의 내부 에지 사이의 제 1 갭은 실질적으로 모든 터렛 둘레에 어떠한 개입 구조체 (intervening structure) 도 없을 수도 있다.
장치의 일부 구현 예들에서, 하나 이상의 방사상 가스 통로들은 제 1 축에 평행한 방향으로 1 ㎜ 미만인 최소 폭을 가질 수도 있다.
장치의 일부 구현 예들에서, 하나 이상의 방사상 가스 통로들은 제 1 축에 평행한 방향으로 0.5 ㎜ 미만인 최소 폭을 가질 수도 있다.
장치의 일부 구현 예들에서, 하나 이상의 방사상 가스 통로들은 제 1 축에 평행한 방향으로 0.25 ㎜ 이하인 최소 폭을 가질 수도 있다.
장치의 일부 구현 예들에서, 하나 이상의 방사상 가스 통로들은 하나 이상의 제 1 표면들 및 하나 이상의 제 2 표면들에 의해 적어도 부분적으로 규정될 수도 있고, 그리고 하나 이상의 제 1 표면들은 하나 이상의 제 2 표면들을 향해 대면할 수도 있고 그리고 제 2 갭에 의해 하나 이상의 제 2 표면들로부터 분리될 수도 있다.
장치의 일부 구현 예들에서, 하나 이상의 제 1 표면들 및 하나 이상의 제 2 표면들은 제 1 축에 수직일 수도 있다.
하나 이상의 제 1 표면들 각각은 제 1 축에 평행하고 어퍼처 상에 센터링된 (center) 제 2 축에 대해 제 1 단면 방사상 프로파일을 규정할 수도 있고, 하나 이상의 제 2 표면들 각각은 제 2 축에 대해 제 2 단면 방사상 프로파일을 규정할 수도 있고, 하나 이상의 제 1 단면 방사상 프로파일들 및 하나 이상의 제 2 단면 방사상 프로파일들을 포함하는 단면 방사상 프로파일들은 각각 제 2 축과 일치하고 평행한 대응하는 평면 내에 있을 수도 있고, 제 1 단면 방사상 프로파일 각각은 제 2 축에 수직의 ± 30 ° 이내인 평균 제 1 선형 방사상 프로파일을 규정할 수도 있고, 그리고 제 2 단면 방사상 프로파일 각각은 제 2 축에 수직의 ± 30 ° 이내인 평균 제 2 선형 방사상 프로파일을 규정할 수도 있다.
장치의 일부 구현 예들에서, 장치는 하나 이상의 플레넘 볼륨들 (plenum volumes), 하나 이상의 가스 유입구들 및 하나 이상의 가스 유입구들로의 가스의 플로우를 조절하도록 구성된 하나 이상의 플로우 제어 컴포넌트들을 더 포함할 수도 있다. 이러한 구현 예들에서, 가스 유입구 각각은 하나 이상의 플레넘 볼륨들 중 하나와 유체적으로 연통될 (fluidically connect) 수도 있고, 하나 이상의 플레넘 볼륨들 각각은 하나 이상의 가스 유입구들 중 적어도 하나와 유체적으로 연통될 수도 있고, 하나 이상의 가스 유입구들 각각은 하나 이상의 플레넘 볼륨들 중 하나와 하나 이상의 플로우 제어 컴포넌트들 중 하나 사이에 유체적으로 개재될 (fluidically interpose) 수도 있고, 그리고 하나 이상의 플레넘 볼륨들 각각은 하나 이상의 가스 유입구들 중 하나와 하나 이상의 방사상 가스 통로들 사이에 유체적으로 개재될 수도 있다.
장치의 일부 구현 예들에서, 장치는 하나 이상의 가스 소스들 (sources) 을 더 포함할 수도 있고, 하나 이상의 플로우 제어 컴포넌트들은 하나 이상의 가스 소스들과 유체적으로 연통될 수도 있고 그리고 하나 이상의 가스 소스들로부터의 가스로 하여금 분당 25 내지 150 표준 리터의 레이트로 하나 이상의 플레넘 볼륨들로 제공되게 하도록 구성될 수도 있다. 이러한 구현 예들에서, 하나 이상의 방사상 가스 통로들은 하나 이상의 플레넘 볼륨들로부터의 가스가 적어도 5 ㎧의 속도로 하나 이상의 방사상 가스 통로들로부터 흐르도록 사이징될 수도 있다.
장치의 일부 구현 예들에서, 터렛의 제 1 부분은 제 1 공칭적으로 원형인 단면을 가질 수도 있고 그리고 어퍼처는 제 1 공칭적으로 원형인 단면의 직경보다 보다 큰 직경을 갖는 대응하는 제 2 공칭적으로 원형인 단면을 가질 수도 있다.
장치의 일부 구현 예들에서, 하나 이상의 방사상 가스 통로들은 연속성의 어떠한 중단들도 없이 전체 어퍼처 둘레로 연장하는 방사상 슬릿의 형태인 단일 가스 통로만을 포함할 수도 있다.
장치의 일부 구현 예들에서, 제 1 갭은 터렛 둘레로 0.5 ㎜ 내지 5 ㎜일 수도 있다.
장치의 일부 구현 예들에서, 장치는 벨로우즈를 더 포함할 수도 있다. 벨로우즈의 제 1 단부는 베이스 내에 위치된 터렛의 단부에 대해 고정될 수도 있고, 제 1 단부 반대편의 벨로우즈의 제 2 단부는 어퍼처로부터 베이스의 반대편 측면 상의 베이스의 표면에 대해 고정될 수도 있고, 벨로우즈는 베이스의 표면으로부터 멀어지는 터렛의 병진에 응답하여 확장할 수도 있고, 그리고 벨로우즈는 베이스의 표면을 향한 터렛의 병진에 응답하여 수축할 수도 있다.
장치의 일부 구현 예들에서, 벨로우즈는 제 1 축을 따라 볼 때 제 1 평균 인클로징된 (enclose) 단면적을 가질 수도 있고, 터렛의 제 1 부분의 최외곽 표면 또는 표면들은 제 1 축을 따라 볼 때 제 2 평균 단면적을 규정할 수도 있고, 그리고 제 1 평균 인클로징된 단면적은 제 2 평균 단면적과 실질적으로 동일할 수도 있다.
장치의 일부 구현 예들에서, 터렛의 제 1 부분은 공칭적으로 원형일 수도 있고 그리고 제 1 공칭 직경을 가질 수도 있고, 벨로우즈는 복수의 플리트들 (pleats) 을 가질 수도 있고, 플리트 각각은 내경 및 외경을 갖고, 그리고 플리트들의 내경들 및 외경들의 평균은 제 1 공칭 직경과 실질적으로 동일할 수도 있다.
장치의 일부 구현 예들에서, 베이스는 베이스의 표면 내에 그리고 제 1 축을 따라 볼 때 벨로우즈에 의해 둘러싸인 (encircle) 영역 내에 하나 이상의 벤트들 (vents) 을 가질 수도 있다.
일부 구현 예들에서, 하나 이상의 로봇 암들, 하나 이상의 로봇 암들을 지지하는 터렛, 터렛을 지지하는 선형 병진 메커니즘, 벨로우즈 및 선형 병진 메커니즘을 지지하는 베이스를 포함하는 장치가 제공될 수도 있다. 이러한 구현 예들에서, 선형 병진 메커니즘은 베이스에 대해 제 1 축을 따라, 터렛뿐만 아니라 하나 이상의 로봇 암들을 병진하도록 구성될 수도 있고, 베이스는 터렛이 제 1 축을 따라 병진될 때, 터렛의 적어도 제 1 부분으로 하여금 이를 통해 통과하게 하도록 사이징된 어퍼처를 포함할 수도 있고, 벨로우즈의 제 1 단부는 베이스 내에 위치된 터렛의 단부에 대해 고정될 수도 있고, 벨로우즈의 제 1 단부 반대편의 벨로우즈의 제 2 단부는 어퍼처로부터 베이스의 반대편 측면 상의 베이스의 표면에 대해 고정될 수도 있고, 벨로우즈는 베이스의 표면으로부터 멀어지는 터렛의 병진에 응답하여 확장할 수도 있고, 그리고 벨로우즈는 베이스의 표면을 향한 터렛의 병진에 응답하여 수축할 수도 있다.
장치의 일부 구현 예들에서, 베이스의 제 1 표면 반대편에 베이스의 제 2 표면과 터렛을 연결하는 벨로우즈가 없을 수도 있다.
장치의 일부 구현 예들에서, 벨로우즈는 제 1 축을 따라 볼 때 제 1 평균 인클로징된 (enclose) 단면적을 가질 수도 있고, 터렛의 제 1 부분의 최외곽 표면 또는 표면들은 제 1 축을 따라 볼 때 제 2 평균 단면적을 규정할 수도 있고, 그리고 제 1 평균 인클로징된 단면적은 제 2 평균 단면적과 실질적으로 동일할 수도 있다.
장치의 일부 구현 예들에서, 터렛의 제 1 부분은 공칭적으로 원형일 수도 있고 그리고 제 1 공칭 직경을 가질 수도 있고, 벨로우즈는 복수의 플리트들 (pleats) 을 가질 수도 있고, 플리트 각각은 내경 및 외경을 갖고, 그리고 플리트들의 내경들 및 외경들의 평균은 제 1 공칭 직경과 실질적으로 동일할 수도 있다.
장치의 일부 구현 예들에서, 베이스는 베이스의 표면 내에 그리고 제 1 축을 따라 볼 때 벨로우즈에 의해 둘러싸인 영역 내에 하나 이상의 벤트들을 가질 수도 있다.
장치의 일부 구현 예들에서, 어퍼처는 실질적으로 모든 어퍼처 둘레로 연장하는 하나 이상의 방사상 가스 통로들을 가질 수도 있고, 하나 이상의 방사상 가스 통로들은 사이즈가 고정될 수도 있고, 제 1 갭이 어퍼처의 내부 에지 사이에 존재할 수도 있다. 및 상기 터렛의 제 1 부분을 포함하고, 상기 제 1 갭은 상기 터렛의 상기 제 1 부분의 외측 주변부 둘레로 연장할 수도 있다.
장치의 일부 구현 예들에서, 터렛의 제 1 부분과 어퍼처의 내부 에지 사이의 제 1 갭은 어떠한 개입 구조체도 없을 수도 있다.
장치의 일부 구현 예들에서, 하나 이상의 방사상 가스 통로들은 제 1 축에 평행한 방향으로 1 ㎜ 미만인 최소 폭을 가질 수도 있다.
장치의 일부 구현 예들에서, 하나 이상의 방사상 가스 통로들은 제 1 축에 평행한 방향으로 0.5 ㎜ 미만인 최소 폭을 가질 수도 있다.
장치의 일부 구현 예들에서, 하나 이상의 방사상 가스 통로들은 제 1 축에 평행한 방향으로 0.25 ㎜ 이하인 최소 폭을 가질 수도 있다.
장치의 일부 구현 예들에서, 하나 이상의 방사상 가스 통로들은 하나 이상의 제 1 표면들 및 하나 이상의 제 2 표면들에 의해 적어도 부분적으로 규정될 수도 있고, 그리고 하나 이상의 제 1 표면들은 하나 이상의 제 2 표면들을 향해 대면할 수도 있고 그리고 제 2 갭에 의해 하나 이상의 제 2 표면들로부터 분리될 수도 있다.
장치의 일부 구현 예들에서, 하나 이상의 제 1 표면들 및 하나 이상의 제 2 표면들은 제 1 축에 수직일 수도 있다.
장치의 일부 구현 예들에서, 하나 이상의 제 1 표면들 각각은 제 1 축에 평행하고 어퍼처 상에 센터링되는 제 2 축에 대해 제 1 단면 방사상 프로파일을 규정할 수도 있고, 하나 이상의 제 2 표면들 각각은 제 2 축에 대해 제 2 단면 방사상 프로파일을 규정할 수도 있고, 하나 이상의 제 1 단면 방사상 프로파일들 및 하나 이상의 제 2 단면 방사상 프로파일들을 포함하는 단면 방사상 프로파일들은 각각 제 2 축과 일치하고 평행한 대응하는 평면내에 있을 수도 있고, 제 1 단면 방사상 프로파일 각각은 제 2 축에 수직의 ± 30 ° 이내인 평균 제 1 선형 방사상 프로파일을 규정할 수도 있고, 그리고 제 2 단면 방사상 프로파일 각각은 제 2 축에 수직의 ± 30 ° 이내인 평균 제 2 선형 방사상 프로파일을 규정할 수도 있다.
장치의 일부 구현 예들에서, 장치는 하나 이상의 플레넘 볼륨들, 하나 이상의 가스 유입구들 및 하나 이상의 가스 유입구들로의 가스의 플로우를 조절하도록 구성된 하나 이상의 플로우 제어 컴포넌트들을 더 포함할 수도 있다. 이러한 구현 예들에서, 가스 유입구 각각은 하나 이상의 플레넘 볼륨들 중 하나와 유체적으로 연통될 (fluidically connect) 수도 있고, 하나 이상의 플레넘 볼륨들 각각은 하나 이상의 가스 유입구들 중 적어도 하나와 유체적으로 연통될 수도 있고, 하나 이상의 가스 유입구들 각각은 하나 이상의 플레넘 볼륨들 중 하나와 하나 이상의 플로우 제어 컴포넌트들 중 하나 사이에 유체적으로 개재될 (fluidically interpose) 수도 있고, 그리고 하나 이상의 플레넘 볼륨들 각각은 하나 이상의 가스 유입구들 중 하나와 하나 이상의 방사상 가스 통로들 사이에 유체적으로 개재될 수도 있다.
장치의 일부 구현 예들에서, 장치는 하나 이상의 가스 소스들을 포함할 수도 있다. 이러한 구현 예들에서, 하나 이상의 플로우 제어 컴포넌트들은 하나 이상의 가스 소스들과 유체적으로 연통될 수도 있고 그리고 하나 이상의 가스 소스들로부터의 가스로 하여금 분당 25 내지 150 표준 리터의 레이트로 하나 이상의 플레넘 볼륨들로 제공되게 하도록 구성될 수도 있고 그리고 하나 이상의 방사상 가스 통로들은 하나 이상의 플레넘 볼륨들로부터의 가스가 적어도 5 ㎧의 속도로 하나 이상의 방사상 가스 통로들로부터 흐르도록 사이징될 수도 있다.
장치의 일부 구현 예들에서, 터렛의 제 1 부분은 제 1 공칭적으로 원형인 단면을 가질 수도 있고 그리고 어퍼처는 제 1 공칭적으로 원형인 단면의 직경보다 보다 큰 직경을 갖는 대응하는 제 2 공칭적으로 원형인 단면을 가질 수도 있다.
장치의 일부 구현 예들에서, 하나 이상의 방사상 가스 통로들은 연속성의 어떠한 중단들도 없이 전체 어퍼처 둘레로 연장하는 방사상 슬릿의 형태인 단일 가스 통로만을 포함할 수도 있다.
장치의 일부 구현 예들에서, 제 1 갭은 터렛 둘레로 0.5 ㎜ 내지 5 ㎜일 수도 있다.
도 1은 예시적인 반도체 프로세싱 툴의 다이어그램 (diagram) 을 도시한다.
도 2는 제 1 구성의 예시적인 웨이퍼 핸들링 로봇을 갖는 예시적인 EFEM의 다이어그램이다.
도 3은 제 2 구성의 예시적인 웨이퍼 핸들링 로봇을 갖는 도 2의 예시적인 EFEM의 다이어그램이다.
도 4는 제 3 구성의 예시적인 웨이퍼 핸들링 로봇을 갖는 도 2의 예시적인 EFEM의 다이어그램이다.
도 5는 예시적인 가스 커튼 시스템의 일부의 단면도이다.
도 6은 또 다른 예시적인 가스 커튼 시스템의 일부의 단면도이다.
도 7은 또 다른 예시적인 가스 커튼 시스템의 단면도이다.
도 8은 예시적인 가스 커튼 시스템의 평면도이다.
도 9는 또 다른 예시적인 가스 커튼 시스템의 평면도이다.
도 10은 또 다른 예시적인 가스 커튼 시스템의 평면도이다.
도 2는 제 1 구성의 예시적인 웨이퍼 핸들링 로봇을 갖는 예시적인 EFEM의 다이어그램이다.
도 3은 제 2 구성의 예시적인 웨이퍼 핸들링 로봇을 갖는 도 2의 예시적인 EFEM의 다이어그램이다.
도 4는 제 3 구성의 예시적인 웨이퍼 핸들링 로봇을 갖는 도 2의 예시적인 EFEM의 다이어그램이다.
도 5는 예시적인 가스 커튼 시스템의 일부의 단면도이다.
도 6은 또 다른 예시적인 가스 커튼 시스템의 일부의 단면도이다.
도 7은 또 다른 예시적인 가스 커튼 시스템의 단면도이다.
도 8은 예시적인 가스 커튼 시스템의 평면도이다.
도 9는 또 다른 예시적인 가스 커튼 시스템의 평면도이다.
도 10은 또 다른 예시적인 가스 커튼 시스템의 평면도이다.
상기 논의된 바와 같이, EFEM (equipment front-end module) 들 또는 다른 타입들의 반도체 프로세싱 툴 챔버들에서 사용된 웨이퍼 핸들링 로봇들은 웨이퍼 핸들링 로봇에 의한 미립자 생성을 감소시키고 그리고 예를 들어, (웨이퍼 핸들링 로봇이 이러한 환경에서 사용된다면) 웨이퍼 핸들링 로봇의 내부 컴포넌트들의 부식성 가스들에 노출 가능성을 감소시키기 위해 상기 간략하게 기술된 시스템들과 같은 시스템들을 활용할 수도 있다.
도 1은 예시적인 반도체 프로세싱 툴의 다이어그램 (diagram) 을 도시한다. 도 1에서, 웨이퍼 핸들링 로봇 (114) 이 내부에 위치된 EFEM (110) 을 포함하는 반도체 프로세싱 툴 (100) 이 도시된다. EFEM (110) 은 FOUP (front-opening unified pod) (108) 내에 하우징된 웨이퍼들로 하여금 웨이퍼 핸들링 로봇 (114) 에 의해 EFEM (110) 내로 이송되게 할 수도 있는 하나 이상의 로드 포트들 (106) 과 연결될 수도 있다. EFEM (110) 은 또한 하나 이상의 로드 록들 (104) 에 의해 이송 챔버 (102) (또는 프로세싱 챔버와 같은, 다른 챔버) 와 연결될 수도 있다. EFEM (110) 은 또한 EFEM 내의 공기로 하여금 EFEM (110) 의 플로어 내의 벤트 시스템 내로 하향 강제되게 할 수도 있는 팬 (fan) 유닛 (112) 을 구비할 수도 있다; 다른 구현 예에서, 벤트 시스템은 EFEM (110) 을 통해 하향으로 공기를 인출하도록 (draw) 부압 (negative pressure) 소스, 예를 들어, 블로어 (blower) 유닛을 갖는 배기 시스템과 단순히 연결될 수도 있다 (또 다른 구현 예들에서, EFEM은 벤트 시스템을 전혀 갖지 않을 수도 있다).
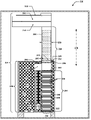
도 2는 제 1 구성의 예시적인 웨이퍼 핸들링 로봇을 갖는 예시적인 EFEM의 다이어그램이다. 도 2에서, EFEM (210) 이 도시된다; 이 예에서 EFEM (210) 은 과도한 클러터를 방지하고 그리고 논의가 웨이퍼 핸들링 로봇 (214) 에 초점을 맞추도록, 다른 컴포넌트들, 예를 들어, 로드 포트들, 로드 록들, 등에 부착된 것으로 도시되지 않는다. 웨이퍼 핸들링 로봇 (214) 은 예를 들어, 터렛 (turret) (224) 을 상승시키거나 하강시키도록 구성된 선형 병진 (linear translation) 메커니즘 (242) 을 내부에 갖는 베이스 (230) 를 포함할 수도 있다. 이 예에서 선형 병진 메커니즘 (242) 은 터렛 (224) 에 부착되고 (affix) 일 단부 상에서 베어링 지지부 (248) 에 의해 그리고 다른 단부 상에서 모터 (250) 에 의해 지지되는 볼 스크루 너트 (ball screw nut) (246) 를 통과할 수도 있는 볼 스크루 (244) 를 포함한다. 모터 (250) 가 볼 스크루 (244) 를 회전시키도록 작동될 때, 볼 스크루 (244) 는 볼 스크루 너트 (246) 로 하여금 상승 및 하강되게 하고, 이에 따라 터렛 (224)으로 하여금 제 1 축 (238) 에 평행한 방향을 따라 어퍼처 (252) 를 통해 연장하거나 후퇴하게 (retract) 한다. 베이스 (230) 는 일반적으로 베이스 (230) 내의 하드웨어를 인클로징하고 (enclose) 보호하는 하우징을 가질 수도 있다; 그러나, 이 하우징은 하우징의 내부와 외부 사이에 가스가 흐르게 할 수도 있는 다양한 개구부들 또는 누설 경로들을 가질 수도 있다 (이하에 논의됨).
터렛 (224) 은 예를 들어, 터렛 내 (또는 다른 곳) 에 위치된 다양한 구동 모터들 및 다른 시스템들에 의해 작동될 수도 있는 상부 링크 (218), 하부 링크 (220) 및 엔드 이펙터 (end effector) (222) 를 포함할 수도 있는 하나 이상의 로봇 암들을 지지할 수도 있다.
앞서 논의된 바와 같이, 웨이퍼 핸들링 로봇은 웨이퍼 핸들링 로봇에 의한 입자 생성을 완화시킬 수도 있고 그리고/또는 부식성 주변 환경들에 대한 잠재적인 유해한 노출로부터 웨이퍼 핸들링 로봇을 보호하는 것을 도울 수도 있는 본 명세서에 기술된 2 개의 기술들 중 하나 또는 모두를 포함할 수도 있다.
이하에 보다 상세히 논의된 제 1 기술은 어퍼처 (252) 를 규정하는 칼라 (collar) (232) 에 의해 제공될 수도 있는 방사상 가스 커튼의 포함이다. 칼라 (232) 는 칼라 (232) 내의 플레넘 볼륨 (plenum volume) (236) 과 유체적으로 연통된 하나 이상의 방사상 가스 통로들 (234) 을 포함할 수도 있다. 가스는 하나 이상의 가스 유입구들 (미도시) 을 통해 플레넘 볼륨 (236) 내로 흐를 수도 있고 이어서 하나 이상의 방사상 가스 통로들 (234) 로부터 방사상 내향 방식으로 터렛 (224) 을 향해 상대적으로 높은 속도로, 예를 들어, 5 ㎧, 10 ㎧, 15 ㎧, 20 ㎧, 25 ㎧, 또는 그 이상으로 흐를 수도 있다. 하나 이상의 방사상 가스 통로들 (234) 은 감소된 양의 체적 가스 플로우 예를 들어, 25 내지 150 SLM (standard liters per minute) 또는 50 내지 100 SLM의 체적 가스 플로우 레이트로 목표된 가스 속도를 달성하도록, 상대적으로 얇게 예를 들어, 1 ㎜, 0.75 ㎜, 0.5 ㎜, 또는 0.25 ㎜ 이하의 높이를 갖게, 사이징될 수도 있다. 제 1 갭 (gap) (240) 은 터렛 (224) 의 제 1 부분 (226) 으로 하여금 칼라 (232) 와 콘택트하지 (contact) 않고 어퍼처 (252) 를 통해 병진하게 하도록 터렛 (224) 과 칼라 (232) 사이에 존재할 수도 있다. 이 제 1 갭 (240) 은 5 ㎜, 4 ㎜, 3 ㎜, 2 ㎜, 1 ㎜, 또는 0.5 ㎜ 이하 (또는 사이) 의 값으로 유지될 수도 있다. 이 예에서, 터렛 (224) 은 일반적으로 실린더형이고 제 1 공칭 직경 (228) 을 갖고, 그리고 어퍼처 (252) 는 제 1 공칭 직경 (228) 과 제 1 갭 (240) 의 합의 2 배와 동일한 공칭 직경을 갖는 원형 어퍼처이다. 다른 구현 예들은 상이한 공칭 단면 형상, 예를 들어, 정사각형, 육각형, 등을 갖는 터렛 (224) 을 특징으로 할 수도 있고, 그리고 칼라 (232) 의 어퍼처 (252) 는 제 1 갭 (240) 이 일반적으로 일정하게 유지되도록 유사하게 예를 들어, 터렛 (224) 의 제 1 부분 (226) 의 주변부 둘레에 ± 10 % 또는 ± 20 % 성형될 수도 있다는 것이 이해될 것이다.
상기 주지되고 이하에 보다 상세히 기술된 바와 같이, EFEM 내 환경 및/또는 웨이퍼 핸들링 로봇 내부 컴포넌트들과 양립할 수도 있는 가스, 예컨대 청정 건조 공기 (clean dry air), 질소, 또는 다른 가스는 플레넘 볼륨 (236) 을 통해, 하나 이상의 방사상 가스 통로들 (234) 로부터, 그리고 터렛 (224) 의 외측 표면을 향해 방사상 내향으로 흐를 수도 있고, 이는 이어서 터렛 (224) 의 외측 표면을 따라 상향 및 하향 모두로 흐르도록 가스 플로우를 회전시킬 수도 있다. 베이스 (230) 내로 하향으로 흐르는 가스의 부분은 제 1 갭 (240) 을 통해 베이스로부터 흐르도록 시도될 수도 있는 모든 가스들에 맞서 밀어내도록 역할하여, 베이스 (230) 내로부터 그리고 어퍼처 (252) 를 통한 가스들의 흐름 및 그 내부로 유입될 수도 있는 모든 미립자들에 저항할 수도 있다. 베이스 (230) 는 또한 베이스 (230) 내로부터 압력을 완화하기 위해 베이스 (230) 의 표면, 예를 들어, 베이스 (230) 의 하단 표면 (264) 을 따라 위치될 수도 있고, 그리고 베이스 내로부터 가스를 배기하도록 제어될 수도 있는 하나 이상의 배기 팬들 (exhaust fans) (265) 을 가질 수도 있다. 팬(들)의 속도는 팬들을 통한 가스의 체적 플로우 레이트가 어퍼처 (252) 를 통해 그리고 베이스 (230) 로의 가스의 체적 플로우 레이트와 공칭적으로 같도록, 예를 들어, 대략 칼라 (232) 로부터의 가스의 체적 플로우 레이트의 1/2로, 제어될 수도 있다. 이는 칼라 (232) 로부터의 가스 플로우로 인해 베이스 (230) 내에 축적되는 모든 압력이 블리드-오프 (bleed off) 되게 하고, 이에 따라 칼라 (232) 로부터의 가스 플로우가 베이스 (230) 내로부터의 가스의 플로우를 계속해서 막아내게 (counter) 할 수도 있다. 일부 구현 예들에서, 팬들에 의해 베이스 (230) 로부터 흐르는 가스는, 플로어-위치된 배기 시스템을 구비한 EFEM에서 하향 드래프트 (downdraft) 에 의해 하향으로 인출될 수도 있다. 다른 구현 예들에서, 팬들 (265) 은 생략될 수도 있고 그리고 칼라 (232) 에 의해 베이스 (230) 내로 도입된 가스로 하여금 베이스 (230) 로부터 그리고 베이스 (230) 가 위치된 EFEM (210) 또는 다른 챔버의 주변 환경 내로 벤팅하게 하도록 제공될 수도 있는 하나 이상의 벤트들 또는 배기 포트들에 의해 대체될 수도 있다. 이러한 경우들에서, 벤트들 또는 배기 포트(들)는 (즉, 공칭 주변 압력 조건에서 웨이퍼 이송 동작들 동안 사용된 EFEM (210) 또는 다른 챔버를 사용하여 그리고 공칭 플로우 레이트로 방사상 가스 커튼을 제공하는 칼라 (232) 또는 다른 구조체를 사용하여) 정상 동작 동안 EFEM (210) 내 주변 압력보다 적어도 수 파스칼들 (Pascals) 높은 내부 압력이 베이스 (230) 에서 유지되어, EFEM (210) 의 주변 환경의 부식성 가스들이 베이스 (230) 로 들어가는 것의 가능성을 방지하거나 감소시키도록, 사이징될 수도 있다.
상기 논의된 방사상 가스 커튼과 함께 또는 단독으로 웨이퍼 핸들링 로봇에 포함될 수도 있는, 제 2 기술은 터렛 (224) 의 하단과 하단 표면 (264) 사이에 걸쳐있는 벨로우즈 (254) 의 사용이다. 엘라스토머 재료, 엘라스토머-함침 텍스타일, 또는 박형 금속과 같은, 가요성 재료로 이루어질 수도 있는 벨로우즈 (254) 는 터렛 (224) 의 하단 표면 또는 표면들에 부착되는 제 1 단부 (260) 및 베이스 (230) 의 하단 표면 (264) 에 부착되는 제 2 단부를 포함할 수도 있다. 베이스 (230) 의 하단 표면 (264) 은 벨로우즈 (254) 가 압축될 때, 예를 들어, 터렛 (224) 이 상승된 위치로부터 하강된 위치로 이동될 때 벨로우즈 (254) 내의 가스로 하여금 빠져 나가게 (escape) 할 수도 있는 벤트 (또는 벤트들) (258) 를 가질 수도 있다.
일부 구현 예들에서, 벨로우즈 (254) 는 내경 (266) 및 외경 (268) 을 각각 갖는 복수의 플리트들 (pleats) (256) 을 가질 수도 있다. 벨로우즈 (254) 의 플리트들 (256) 의 내경 (266) 및 외경 (268) 은 일반적으로 터렛 (224) 의 제 1 부분 (226) 의 제 1 공칭 직경 (228) 과 같도록, 예를 들어, 제 1 공칭 직경 (228) 의 ± 10 % 또는 ± 20 % 이내의 평균 직경을 생성하도록 선택될 수도 있다. 이러한 방식으로 내경 (266) 및 외경 (268) 을 선택함으로써, 터렛 (224) 및 벨로우즈 (254) 는 베이스 (230) 내에서 베이스 (230) 로부터 터렛 (224) 이 얼마나 멀리 또는 조금 연장되는지와 무관하게 공칭적으로 일정한 사이즈를 유지하는 볼륨을 함께 점유할 수도 있다. 그 결과, 터렛 (224) 이 베이스 (230) 내로 또는 베이스 (230) 로부터 병진될 때, 베이스 (230) 내에 변위되는 (베이스 (230) 내에 있는 공기의 볼륨은 포함하지 않지만 벨로우즈 (254) 에 의해 베이스 (230) 의 내부 볼륨으로부터 "월 오프된 (wall-off)" 공기의 볼륨은 포함하는) 가스의 볼륨은 무시할 만할 수도 있다. 따라서, 도 2에 도시된 바와 같이 벨로우즈 (254) 를 사용하는 것은 터렛 (224) 의 반복 동작 (reciprocating action) 으로 인해 베이스 내로부터 가스로 하여금 어퍼처 (252) 를 통해 강제로 방출되는 것을 방지한다 (또는 적어도 방출될 수도 있는 이러한 가스의 양을 상당히 감소시킨다). 도 3은 제 2 구성, 예를 들어, 부분적으로 연장된 예시적인 웨이퍼 핸들링 로봇을 갖는 도 2의 예시적인 EFEM의 다이어그램이고, 그리고 도 4는 제 3 구성, 예를 들어, 완전히 후퇴된 예시적인 웨이퍼 핸들링 로봇을 갖는 도 2의 예시적인 EFEM의 다이어그램이다. 구성 각각에서 알 수 있는 바와 같이, 베이스 (230) 의 내부 볼륨 (231) 은 터렛 (224) 이 얼마나 연장되거나 수축되는지와 무관하게 거의 동일하게 유지된다. 이에 따라, 도 2 내지 도 4에 도시된 방식의 벨로우즈의 사용은 웨이퍼 핸들링 로봇 (214) 의 터렛 (224) 으로 하여금 베이스 (230) 내에서 공기 (또는 가스) 변위 방식으로 매우 적게 연장하거나 후퇴하게 할 수도 있다. 이는 이러한 가스 내에 동반되는 미립자들이 터렛의 이러한 반복 동작에 의해 베이스 (230) 로부터 강제로 방출되는 가능성을 극적으로 감소시킬 수도 있다.
상기 논의된 벨로우즈는 공칭적으로 실린더 형상이 아닌 터렛들과 함께 사용될 수도 있다는 것이 또한 인식될 것이다. 이러한 구현 예들에서, 벨로우즈 플리트들의 내경 및 외경은 (예를 들어, 벨로우즈 플리트들의 내경 및 외경의 평균인 직경을 갖는 원 내의 면적에 기초하여) 일반적으로 터렛의 제 1 부분의 최외곽 표면들 내 그리고 제 1 축 (238) 에 수직인 평면 내 단면적과 동일한 평균 단면적을 규정하도록 선택될 수도 있다 (또는, 비원형 벨로우즈가 사용된다면, 벨로우즈 내의 영역을 포함하는, 벨로우즈의 평균 단면적은 일반적으로 터렛의 제 1 부분의 최외곽 표면들 내의 단면적과 동일할 수도 있다).
앞서 논의된 바와 같이, 상기 논의된 벨로우즈는 이전에 논의된 방사상 가스 커튼 피처와 함께 또는 방사상 가스 커튼 피처 없이 (그리고 반대로) 사용될 수도 있다. 방사상 가스 커튼 피처는 이하에 보다 상세히 논의되는 바와 같이, 다수의 상이한 방식들로 구성될 수도 있다.
도 5는 예시적인 가스 커튼 시스템의 일부의 단면도이다. 도 5에서 알 수 있는 바와 같이, 칼라 (532) 는 하나 이상의 가스 유입구들 (574) 에 의해 공기가 피딩되는 (feed) 플레넘 볼륨 (536) 을 가질 수도 있다. 플레넘 볼륨 (536) 은 하나 이상의 가스 유입구들 (574) 로부터 하나 이상의 방사상 가스 통로들 (534) 로 가스를 분배하도록 구성될 수도 있다. 하나 이상의 방사상 가스 통로들 (534) 은 플레넘 볼륨 (536) 으로부터 터렛 (524) 을 향해 가스, 예를 들어, 공기를 지향시키도록, 방사상 내향으로, 예를 들어, 제 1 갭 (540) 을 가로질러 그리고 터렛 (524) 을 향해 지향될 수도 있다. 도 5에 도시된 구현 예에서, 하나 이상의 방사상 가스 통로들 (534) 은 터렛 (524) 둘레에 모든 방식으로 연장하는 단일 원주 방사상 슬릿의 형태를 취한다. 이 경우 방사상 가스 통로 (534) 는 서로 대면할 수도 있고 그리고 제 2 갭 (584) 에 의해 분리될 수도 있는 제 1 표면 (580) 및 제 2 표면 (582) 에 의해 제공된다. 제 1 표면 (580) 은 이 예에서 라인인, 제 1 단면 방사상 프로파일 (586) 에 의해 규정될 수도 있고, 그리고 평균 제 1 선형 방사상 프로파일 (590) 에 의해 나타날 수도 있다. 유사하게, 제 2 표면 (582) 은 또한 이 예에서 라인인, 제 2 단면 방사상 프로파일 (588) 에 의해 규정될 수도 있고, 그리고 평균 제 2 선형 방사상 프로파일 (592) 에 의해 나타날 수도 있다.
도 5는 선형 방사상 슬릿, 즉, 예시적인 방사상 가스 통로로서, 평균 제 1 선형 방사상 프로파일 (590) 및 평균 제 2 선형 방사상 프로파일 (592) 이 서로 평행하고 제 1 축 (538) 에 수직인 하나를 도시하지만, 예를 들어, 커브되거나 (curved) 경사진 (sloped) 제 1 표면 및 제 2 표면을 갖는 방사상 가스 통로들을 포함하는, 방사상 가스 통로의 다른 구성들이 또한 사용될 수도 있다.
도 6은 또 다른 예시적인 가스 커튼 시스템의 일부의 단면도이다. 도 6의 가스 커튼 시스템은 도 5의 가스 커튼 시스템과 유사하고, 그리고 도 6에서 도 5와 동일한 마지막 2 개의 숫자들 (digits) 을 갖는 표기들 (callouts) 은 유사한 구조들을 지칭한다; 독자는 이들 구조들의 논의를 위해 도 5의 이전 논의를 참조한다. 도 6의 가스 커튼 시스템은 방사상 가스 통로 (634) 가 상이한 단면 프로파일을 갖는다는 점에서 도 5의 가스 커튼 시스템과 상이하다. 예를 들어, 방사상 가스 통로 (634) 는 제 1 표면 (680) 및 제 2 표면 (682) 에 의해 규정된다. 제 1 표면 (680) 은 평균 제 1 선형 방사상 프로파일 (690) 을 규정하는 커브된 제 1 단면 방사상 프로파일 (686) 및 평균 제 2 선형 방사상 프로파일 (692) 을 규정하는 커브된 제 2 단면 방사상 프로파일 (688) 을 가질 수도 있다. 일부 이러한 구현 예들에서, 평균 제 1 선형 방사상 프로파일 (690) 및 평균 제 2 선형 방사상 프로파일 (692) 은 각각 제 1 축 (638) 에 수직인 축의 ± 10 °, ± 20 °, 또는 ± 30 ° 이내일 수도 있다. 일부 추가의 이러한 구현 예들에서, 평균 제 1 선형 프로파일 (690) 및 평균 제 2 선형 프로파일 (692) 은 예를 들어, 제 1 축 (638) 에 수직인 축에 대해 비대칭적으로 기울어질 수도 있다. 예를 들어, 평균 제 1 선형 프로파일 (690) 및 평균 제 2 선형 프로파일 (692) 은 모두 베이스를 향해 약간 하향으로 기울어질 수도 있고, 이에 따라 방사상 커튼 가스의 플로우로 하여금 터렛 (224) 에 부딪친 후 EFEM (210) 내보다 베이스 (230) 를 향해 보다 바이어스되게 (bias) 한다. 또 다른 예에서, 평균 제 1 선형 프로파일 (690) 및 평균 제 2 선형 프로파일 (692) 은 모두 베이스로부터 멀어져, 약간 상향으로 기울어질 수도 있고, 이에 따라 방사상 커튼 가스의 플로우로 하여금 터렛 (224) 에 부딪친 후 베이스 (230) 내보다 EFEM (210) 내로 보다 바이어스되게 한다. 이는 베이스 (230) 내로부터의 공기가 어퍼처 (252) 를 통해 EFEM (210) 에 들어가는 것을 방지하는 것에 비해 EFEM (210) 내로부터의 가스가 어퍼처 (252) 를 통해 베이스 (230) 에 들어가는 것을 방지하기 위해 할당된 가스량의 튜닝을 허용할 수도 있다.
앞서 논의된 바와 같이, 본 명세서에 논의된 칼라들 중 하나의 칼라의 하나 이상의 방사상 가스 통로들로부터 지향되는 가스는 웨이퍼 핸들링 로봇의 터렛을 향해 지향될 수도 있다. 도 7은 이러한 가스 플로우를 도시하는 예시적인 가스 커튼 시스템의 단면도이다. 도 7에서 알 수 있는 바와 같이, (공기 플로우 화살표들로 도시된 바와 같이) 가스 유입구들 (774) 로부터 가스를 수용하고 그리고 방사상 가스 통로 (734) 로 가스를 분배하는 플레넘 볼륨 (736) 을 갖는 칼라 (732) 가 도시된다. 방사상 가스 통로 (734) 로부터 방출된 후, 가스는 터렛 (724) 의 측면과 부딪치도록, 제 1 갭 (740) 을 가로질러 방사상 내향으로 지향된다. 이어서 가스 플로우는 2 개의 일반적인 방향들―상향으로, 다시 EFEM으로, 그리고 하향으로, 베이스 내로 분할된다.
상기 논의된 칼라들 및 칼라들이 포함하는 방사상 가스 통로(들)는 다수의 포맷들로 제공될 수도 있다는 것이 이해될 것이다. 일부 구현 예들에서, 칼라는 별개의 컴포넌트가 아닌 베이스 또는 또 다른 컴포넌트의 하우징에 통합될 수도 있다. 본 명세서에 논의된 가스 커튼 시스템들의 일부 구현 예들은 가변하는 기하 구조들의 방사상 가스 통로들을 특징으로 할 수도 있다. 이들 다양한 구현 예들 중 일부는 이하에 논의된다.
도 8은 예시적인 가스 커튼 시스템의 평면도이다. 도 8에서, 가스 유입구들 (874) 을 통해 가스가 제공되는 플레넘 볼륨 (836) 을 포함하는 칼라 (832) 가 도시된다. 터렛 (824) 은 칼라 (832) 의 어퍼처를 통해 연장하고 그리고 제 1 갭 (840) 에 의해 칼라 (832) 로부터 분리된다. 플레넘 볼륨 (836) 으로부터의 가스는 본 명세서에 논의된 이전 칼라들의 일부와 같이, 단일 원주 방사상 슬릿인 방사상 가스 통로 (834) 를 통해 제 1 갭 (840) 을 가로질러 흐를 수도 있다. 이러한 방사상 가스 통로 (834) 는 터렛 (824) 의 원주 둘레에 고르게 분포된 가스 플로우를 제공할 수도 있다.
도 9는 또 다른 예시적인 가스 커튼 시스템의 평면도이다. 도 9의 가스 커튼 시스템은 도 8의 가스 커튼 시스템과 유사하고, 그리고 도 9에서 도 8에서와 동일한 마지막 2 개의 숫자들을 갖는 표기들은 유사한 구조들을 지칭한다; 독자는 이들 구조들의 논의를 위해 도 8의 이전 논의를 참조한다. 도 8의 가스 커튼 시스템과 대조적으로, 도 9의 가스 커튼 시스템은 대략 90 °의 아크 (arc) 에 각각 걸쳐 있고 (명시되지 않았지만 12시, 3시, 6시 및 9시 위치에서 볼 수 있는) 작은 방사상 벽에 의해 인접한 방사상 가스 통로들 (934) 로부터 분리된, 4 개의 방사상 가스 통로들 (934) 을 특징으로 한다. 이러한 배열은 작은 방사상 벽들이 가스 플로우의 최소 중단만을 제공할 수도 있기 때문에 터렛 (924) 의 원주 둘레에 실질적으로 연속적인 방사상 가스 커튼을 제공할 수도 있다. 그러나, 작은 방사상 벽들은 방사상 가스 통로들 (934) 에 대해 일정한 높이를 유지하는 것을 돕는 유용한 메커니즘을 제공할 수도 있다.
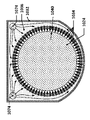
도 10은 또 다른 예시적인 가스 커튼 시스템의 평면도이다. 도 10의 가스 커튼 시스템은 도 8의 가스 커튼 시스템과 유사하고, 그리고 도 10에서 도 8에서와 동일한 마지막 2 개의 숫자들을 갖는 표기들은 유사한 구조들을 지칭한다; 독자는 이들 구조들의 논의를 위해 도 8의 이전 논의를 참조한다. 도 10에서, 방사상 가스 통로 (1034) 각각은 방사상으로 연장하는 홀 또는 채널인, 많은 수의, 예를 들어, 72 개의 방사상 가스 통로들 (1034) 이 있다. 이러한 개별 방사상 가스 통로들은 개별 홀들 또는 채널들을 통해 터렛 (1024) 의 주변부 둘레에 가스의 일반적으로 연속적인 커튼을 공급하도록 터렛 (1024) 의 외측 주변부 둘레로 연장하는 밀접하게 패킹된 (closely-packed) 배열로 배치되도록 배치될 수도 있다.
상기 논의된 방사상 가스 커튼 시스템들은 이러한 시스템들에서 사용되는 하나 이상의 방사상 가스 통로들이 가스를 터렛에 직접 지향시키고 그리고 사이즈가 고정되기 때문에, 즉, 시간이 흐름에 따라 이러한 방사상 가스 통로들의 제 2 갭들은 (잠재적인 열 팽창 효과들을 제외하고) 가변할 수 없기 때문에, 일관되고 가변하지 않는 성능을 제공한다는 것이 인식될 것이다. 이는 샤프트 (shaft) 를 둘러싸는 (encircle) 시일 (seal) 이 공간에서 "플로팅 (float)"되게 하고, 외측 표면, 상부 표면 및 하부 표면을 따라 흐르는 가스의 박층에 의해 완충되는 플로팅 시일 시스템들에 대해 대조적이다 - 이러한 시스템들에서, 가스가 흐르는 갭들은 시일의 플로팅 운동으로 인해 사이즈가 변화할 수도 있고, 갭들의 플로우 컨덕턴스의 변화들 및 이러한 갭들에 대한 가스 플로우 레이트의 수반되는 변동들을 야기한다. 부가적으로, 플로팅 시일의 사용은 시일 자체가 잠재적으로 다른 컴포넌트들과 콘택트할 수 있고, 이어서 시일 영역으로부터 그리고 잠재적으로 EFEM 내로 분출되는 미립자 물질을 생성할 수도 있기 때문에, 미립자 생성의 부가적인 잠재적 소스를 도입한다. 이러한 방사상 가스 커튼 시스템들은 또한 샤프트 둘레의 환형 플레넘에 예를 들어, 2 또는 4 또는 8 개의 가스 포트들과 같은 적은 수의 가스 포트들을 통해 가압된 가스가 제공되는 시스템들에 비해 이점들을 제공한다. 이러한 시스템들에서, 일반적으로 연속적인 방사상 가스 커튼을 방사상 내향으로 지향시키고, 이에 따라 보다 균일한 가스 플로우 분포를 생성하는, 본 명세서에 논의된 가스 커튼 시스템들과 비교하여 환형 플레넘 위아래에 보다 작은 환형 유출구 존들을 통해 그리고 샤프트를 따라 흐르는 가스는 적은 수의 가스 포트들로 인한 환형 플레넘 내 압력 차들로 인해 원주형 플로우 변동들을 볼 수도 있다.
상기 논의된 하나 또는 두 기술들 모두를 갖는 웨이퍼 핸들링 로봇들은 앞서 논의된 바와 같이, 하나 이상의 제어기들에 의해 제어될 수도 있는 보다 큰 반도체 프로세싱 툴의 일부일 수도 있다.
제어기는 상기 기술된 예들을 포함할 수도 있는 시스템의 일부일 수도 있고, 그리고 이러한 장비로부터 정보를 수신하고 그리고/또는 이러한 장비를 제어할 수 있도록 다양한 밸브들, 질량 유량 제어기들 (mass flow controllers), 펌프들, 등과 동작 가능하게 연결될 수도 있다. 이러한 시스템들은, 프로세싱 툴 또는 툴들, 챔버 또는 챔버들, 프로세싱용 플랫폼 또는 플랫폼들 및/또는 특정 프로세싱 컴포넌트들 (웨이퍼 페데스탈, 가스 플로우 시스템, 등) 을 포함하는, 반도체 프로세싱 장비를 포함할 수 있다. 이들 시스템들은 반도체 웨이퍼 또는 기판의 프로세싱 이전에, 프로세싱 동안에, 그리고 프로세싱 이후에 그들의 동작을 제어하기 위한 전자 장치들과 통합될 수도 있다. 전자 장치는 시스템들 또는 시스템의 서브 파트들 또는 다양한 컴포넌트들을 제어할 수도 있는 "제어기 (controller)"로서 지칭될 수도 있다. 프로세싱 요건들 및/또는 시스템의 타입에 따라, 제어기는 다양한 가스들의 전달, 온도 설정들 (예를 들어, 가열 및/또는 냉각), 압력 설정들, 진공 설정들, 전력 설정들, 플로우 레이트 설정들, 유체 전달 설정들, 위치 설정 및 동작 설정을 포함하여, 본 명세서에 개시된 임의의 프로세스들을 제어하도록 프로그래밍될 수도 있다.
일반적으로 말하면, 제어기는 인스트럭션들을 수신하고, 인스트럭션들을 발행하고, 동작을 제어하고, 세정 동작들을 인에이블하고, 엔드포인트 측정들을 인에이블하게 하는, 등을 하는 다양한 집적 회로들, 로직, 메모리 및/또는 소프트웨어를 갖는 전자 장치로서 규정될 수도 있다. 집적 회로들은 프로그램 인스트럭션들을 저장하는 펌웨어의 형태의 칩들, 디지털 신호 프로세서들 (DSPs), ASICs (Application Specific Integrated Circuits) 로서 규정되는 칩들 및/또는 프로그램 인스트럭션들 (예를 들어, 소프트웨어) 을 실행하는 하나 이상의 마이크로프로세서들, 또는 마이크로제어기들을 포함할 수도 있다. 프로그램 인스트럭션들은 반도체 웨이퍼 상에서 또는 반도체 웨이퍼에 대한 특정 프로세스를 실행하기 위한 동작 파라미터들을 규정하는, 다양한 개별 설정 사항들 (또는 프로그램 파일들) 의 형태로 제어기로 또는 시스템으로 전달된 인스트럭션들일 수도 있다. 일부 구현 예들에서, 동작 파라미터들은 하나 이상의 층들, 재료들, 금속들, 옥사이드들, 실리콘, 실리콘 다이옥사이드, 표면들, 회로들 및/또는 웨이퍼의 다이들의 제조 동안에 하나 이상의 프로세싱 단계들을 달성하도록 프로세스 엔지니어들에 의해서 규정된 레시피의 일부일 수도 있다.
제어기는, 일부 구현 예들에서, 시스템에 통합되거나, 시스템에 커플링되거나, 그렇지 않으면 시스템에 네트워킹되거나, 또는 이들의 조합인 컴퓨터에 커플링되거나 이의 일부일 수도 있다. 예를 들어, 제어기는 웨이퍼 프로세싱의 원격 액세스를 가능하게 할 수 있는 공장 (fab) 호스트 컴퓨터 시스템의 전부 또는 일부이거나 "클라우드" 내에 있을 수도 있다. 컴퓨터는 제조 동작들의 현 진행을 모니터링하거나, 과거 제조 동작들의 이력을 조사하거나, 복수의 제조 동작들로부터 경향들 또는 성능 계측치들을 조사하거나, 현 프로세싱의 파라미터들을 변경하거나, 현 프로세싱을 따르는 프로세싱 단계들을 설정하거나, 새로운 프로세스를 시작하기 위해서, 시스템으로의 원격 액세스를 인에이블할 수도 있다. 일부 예들에서, 원격 컴퓨터 (예를 들어, 서버) 가 로컬 네트워크 또는 인터넷을 포함할 수도 있는, 네트워크를 통해 프로세스 레시피들을 시스템에 제공할 수 있다. 원격 컴퓨터는 차후에 원격 컴퓨터로부터 시스템으로 전달될 파라미터들 및/또는 설정 사항들의 입력 또는 프로그래밍을 인에이블하는 사용자 인터페이스를 포함할 수도 있다. 일부 예들에서, 제어기는 하나 이상의 동작들 동안 수행될 프로세싱 단계들 각각에 대한 파라미터들을 특정하는, 데이터의 형태의 인스트럭션들을 수신한다. 파라미터들은 제어기가 제어하거나 인터페이싱하도록 구성되는 툴의 타입 및 수행될 프로세스의 타입에 특정적일 수도 있다는 것이 이해되어야 한다. 따라서 상기 기술된 바와 같이, 제어기는 예컨대 본 명세서에 기술된 프로세스들 및 제어들과 같은, 공통 목적을 향해 함께 네트워킹되고 작동하는 하나 이상의 개별 제어기들을 포함함으로써 분산될 수도 있다. 이러한 목적들을 위한 분산형 제어기의 일 예는 챔버 상의 프로세스를 제어하도록 조합되는 원격으로 (예컨대 플랫폼 레벨에서 또는 원격 컴퓨터의 일부로서) 위치한 하나 이상의 집적 회로들과 통신하는 챔버 상의 하나 이상의 집적 회로들일 것이다.
비한정적으로, 예시적인 시스템들은 플라즈마 에칭 챔버 또는 모듈, 증착 챔버 또는 모듈, 스핀-린스 챔버 또는 모듈, 금속 도금 챔버 또는 모듈, 세정 챔버 또는 모듈, 베벨 에지 에칭 챔버 또는 모듈, 물리적 기상 증착 (Physical Vapor Deposition; PVD) 챔버 또는 모듈, CVD 챔버 또는 모듈, ALD 챔버 또는 모듈, 원자 층 에칭 (Atomic Layer Etch; ALE) 챔버 또는 모듈, 이온 주입 챔버 또는 모듈, 트랙 (track) 챔버 또는 모듈 및 반도체 웨이퍼들의 제조 및/또는 제작 시에 사용되거나 연관될 수도 있는 임의의 다른 반도체 프로세싱 시스템들을 포함할 수도 있다.
상기 주지된 바와 같이, 툴에 의해서 수행될 프로세스 단계 또는 단계들에 따라서, 제어기는, 반도체 제작 공장 내의 툴 위치들 및/또는 로드 포트들로부터/로드 포트들로 웨이퍼들의 컨테이너들을 이동시키는 재료 이송 시에 사용되는, 다른 툴 회로들 또는 모듈들, 다른 툴 컴포넌트들, 클러스터 툴들, 다른 툴 인터페이스들, 인접 툴들, 이웃하는 툴들, 공장 도처에 위치한 툴들, 메인 컴퓨터, 또 다른 제어기, 또는 툴들 중 하나 이상과 통신할 수도 있다.
본 개시의 목적들을 위해, 용어 "유체적으로 연통된 (fluidically connected)"은 용어 "전기적으로 접속된"이 전기적 접속을 형성하도록 함께 연결되는 컴포넌트들에 대해 사용되는 방법과 유사하게, 유체 연통을 형성하기 위해 서로 연결될 수도 있는, 볼륨들, 플레넘들, 홀들, 등에 대해 사용된다. 용어 "유체적으로 개재된 (fluidically interposed)"은, 사용된다면, 적어도 2 개의 다른 컴포넌트들, 볼륨들, 플레넘들, 또는 홀들과 유체적으로 연결된 컴포넌트, 볼륨, 플레넘, 또는 홀을 지칭하도록 사용될 수도 있어서, 이들 다른 컴포넌트들, 볼륨들, 플레넘들, 또는 홀들 중 하나로부터 이들 컴포넌트들, 볼륨들, 플레넘들, 또는 홀들 중 다른 것 또는 또 다른 것으로 흐르는 유체가 이들 컴포넌트들, 볼륨들, 플레넘들, 또는 홀들 중 다른 것 또는 또 다른 것에 도달하기 전에 "유체적으로 개재된" 컴포넌트를 통해 먼저 흐를 것이다. 예를 들어, 펌프가 저장부와 유출구 사이에 유체적으로 개재된다면, 저장부로부터 유출구로 흐르는 유체는 유출구에 도달하기 전에 먼저 펌프를 통해 흐를 것이다.
본 명세서에 사용된다면, "하나 이상의 <아이템들> 의 <아이템> 각각에 대한", "하나 이상의 <아이템들> 의 <아이템> 각각의" 등의 문구들은 단일 아이템 그룹 및 복수의 아이템 그룹들 모두를 포함하는 것으로 이해되어야 한다, 즉, 프로그래밍 언어들에서 아이템들의 집단이 참조되는 모든 아이템의 각각을 참조하기 위해 사용된다는 의미에서 문구 "… 각각에 대해"가 사용된다. 예를 들어, 참조된 아이템들의 집단이 단일 아이템이면, ("각각"의 사전적 정의들이 "둘 이상의 것들의 모든 하나"를 지칭하는 용어를 빈번하게 규정한다는 사실에도 불구하고) "각각 (each)"은 그 단일 아이템만을 지칭하고, 이 아이템들 중 적어도 2 개가 있어야 한다는 것을 암시하지 않는다. 유사하게, 용어 "세트" 또는 "서브 세트"는 그 자체가 복수의 아이템들을 반드시 아우르는 것으로 간주되어서는 안된다 - 세트 또는 서브 세트는 (문맥이 지시하지 않는 한) 단지 하나의 멤버 또는 복수의 멤버들을 아우를 수 있다는 것이 이해될 것이다.
본 개시 및 청구항들에서, 순서 지표들, 예를 들어, (a), (b), (c) … 등의 사용은, 이러한 순서 또는 시퀀스가 명시적으로 지시된 범위를 제외하고, 임의의 특정한 순서 또는 시퀀스를 전달하지 않는 것으로 이해되어야 한다. 예를 들어, (i), (ii) 및 (iii) 로 라벨링된 3 개의 단계들이 있다면, 이들 단계들은 달리 지시되지 않는 한 임의의 순서로 (또는 달리 금기 사항이 아니라면 동시에) 수행될 수도 있다는 것이 이해되어야 한다. 예를 들어, 단계 (ii) 가 단계 (i) 에서 생성된 엘리먼트의 핸들링을 수반한다면, 단계 (ii) 는 단계 (i) 후에 어떤 지점에서 일어나는 것으로 보일 수도 있다. 유사하게, 단계 (i) 가 단계 (ii) 에서 생성된 엘리먼트의 핸들링을 수반한다면, 그 반대가 이해되어야 한다.
"약", "대략", "실질적으로", "공칭" 등과 같은 용어들은 양들 또는 유사한 정량화 가능한 특성들과 관련하여 사용될 때, 달리 명시되지 않는 한, 지정된 값들 또는 관계의 ± 10 % 이내의 값들을 포함 (뿐만 아니라 지정된 실제 값들 또는 관계를 포함) 하는 것으로 이해되어야 한다.
전술한 개념들의 모든 조합들 (이러한 개념들이 서로 모순되지 않는다면) 이 본 명세서에 개시된 발명의 주제의 일부인 것으로 고려된다는 것이 인식되어야 한다. 특히, 본 개시의 끝에 나타나는 청구된 주제의 모든 조합들은 본 명세서에 개시된 발명의 주제의 일부인 것으로 고려된다. 또한 참조로서 인용된 임의의 개시에 나타날 수도 있는 본 명세서에 명시적으로 채용된 용어들은 본 명세서에 개시된 특정한 개념들과 가장 일치하는 의미를 부여해야 한다는 것이 또한 인식되어야 한다.
상기 개시는 특정한 예시적인 구현 예 또는 구현 예들에 집중하지만, 논의된 예로만 제한하는 것이 아니라 유사한 변형들 및 메커니즘들에도 또한 적용될 수도 있고, 이러한 유사한 변형들 및 메커니즘들은 또한 본 개시의 범위 내인 것으로 간주된다. 상기 개시는 적어도 다음의 번호가 붙여진 구현 예들을 아우르도록 의도된다는 것이 부가적으로 이해되어야 한다.
구현 예 1, 하나 이상의 로봇 암들; 하나 이상의 로봇 암들을 지지하는 터렛; 터렛을 지지하는 선형 병진 메커니즘; 및 선형 병진 메커니즘을 지지하는 베이스를 포함하는 장치로서, 선형 병진 메커니즘은 베이스에 대해 제 1 축을 따라, 터렛뿐만 아니라 하나 이상의 로봇 암들을 병진하도록 구성되고, 베이스는 터렛이 제 1 축을 따라 병진될 때 터렛의 적어도 제 1 부분으로 하여금 이를 통해 통과하게 하도록 사이징된 어퍼처를 포함하고, 어퍼처는 실질적으로 모든 어퍼처 둘레로 연장하는 하나 이상의 방사상 가스 통로들을 갖고, 하나 이상의 방사상 가스 통로들은 사이즈가 고정되고, 제 1 갭이 어퍼처의 내부 에지와 터렛의 제 1 부분 사이에 존재하고, 그리고 제 1 갭은 터렛의 제 1 부분의 외측 주변부 둘레로 연장한다.
구현 예 2, 구현 예 1의 장치에 있어서, 터렛의 제 1 부분과 어퍼처의 내부 에지 사이의 제 1 갭은 실질적으로 모든 터렛 둘레에 어떠한 개입 구조체도 없다.
구현 예 3, 구현 예 1의 장치에 있어서, 하나 이상의 방사상 가스 통로들은 제 1 축에 평행한 방향으로 1 ㎜ 미만인 최소 폭을 갖는다.
구현 예 4, 구현 예 1의 장치에 있어서, 하나 이상의 방사상 가스 통로들은 제 1 축에 평행한 방향으로 0.5 ㎜ 미만인 최소 폭을 갖는다.
구현 예 5, 구현 예 1의 장치에 있어서, 하나 이상의 방사상 가스 통로들은 제 1 축에 평행한 방향으로 0.25 ㎜ 이하인 최소 폭을 갖는다.
구현 예 6, 구현 예 1의 장치에 있어서, 하나 이상의 방사상 가스 통로들은 하나 이상의 제 1 표면들 및 하나 이상의 제 2 표면들에 의해 적어도 부분적으로 규정되고, 그리고 하나 이상의 제 1 표면들은 하나 이상의 제 2 표면들을 향해 대면하고 그리고 제 2 갭에 의해 하나 이상의 제 2 표면들로부터 분리된다.
구현 예 7, 구현 예 6의 장치에 있어서, 하나 이상의 제 1 표면들 및 하나 이상의 제 2 표면들은 제 1 축에 수직이다.
구현 예 8, 구현 예 6의 장치에 있어서, 하나 이상의 제 1 표면들 각각은 제 1 축에 평행하고 어퍼처 상에 센터링된 제 2 축에 대해 제 1 단면 방사상 프로파일을 규정하고, 하나 이상의 제 2 표면들 각각은 제 2 축에 대해 제 2 단면 방사상 프로파일을 규정하고, 하나 이상의 제 1 단면 방사상 프로파일들 및 하나 이상의 제 2 단면 방사상 프로파일들을 포함하는 단면 방사상 프로파일들은 각각 제 2 축과 일치하고 평행한 대응하는 평면 내에 있고, 제 1 단면 방사상 프로파일 각각은 제 2 축에 수직의 ± 30 ° 이내인 평균 제 1 선형 방사상 프로파일을 규정하고, 그리고 제 2 단면 방사상 프로파일 각각은 제 2 축에 수직의 ± 30 ° 이내인 평균 제 2 선형 방사상 프로파일을 규정한다.
구현 예 9, 구현 예 1의 장치는, 하나 이상의 플레넘 볼륨들; 하나 이상의 가스 유입구들; 및 하나 이상의 가스 유입구들로의 가스의 플로우를 조절하도록 구성된 하나 이상의 플로우 제어 컴포넌트들을 더 포함하고, 가스 유입구 각각은 하나 이상의 플레넘 볼륨들 중 하나와 유체적으로 연통되고, 하나 이상의 플레넘 볼륨들 각각은 하나 이상의 가스 유입구들 중 적어도 하나와 유체적으로 연통되고, 하나 이상의 가스 유입구들 각각은 하나 이상의 플레넘 볼륨들 중 하나와 하나 이상의 플로우 제어 컴포넌트들 중 하나 사이에 유체적으로 개재되고, 그리고 하나 이상의 플레넘 볼륨들 각각은 하나 이상의 가스 유입구들 중 하나와 하나 이상의 방사상 가스 통로들 사이에 유체적으로 개재된다.
구현 예 10, 구현 예 9의 장치는, 하나 이상의 가스 소스들을 더 포함하고, 하나 이상의 플로우 제어 컴포넌트들은 하나 이상의 가스 소스들과 유체적으로 연통되고 그리고 하나 이상의 가스 소스들로부터의 가스로 하여금 분당 25 내지 150 표준 리터의 레이트로 하나 이상의 플레넘 볼륨들로 제공되게 하도록 구성되고 그리고 하나 이상의 방사상 가스 통로들은 하나 이상의 플레넘 볼륨들로부터의 가스가 적어도 5 ㎧의 속도로 하나 이상의 방사상 가스 통로들로부터 흐르도록 사이징된다.
구현 예 11, 구현 예 1의 장치에 있어서, 터렛의 제 1 부분은 제 1 공칭적으로 원형인 단면을 갖고 그리고 어퍼처는 제 1 공칭적으로 원형인 단면의 직경보다 보다 큰 직경을 갖는 대응하는 제 2 공칭적으로 원형인 단면을 갖는다.
구현 예 12, 구현 예 1의 장치에 있어서, 하나 이상의 방사상 가스 통로들은 연속성의 어떠한 중단들도 없이 전체 어퍼처 둘레로 연장하는 방사상 슬릿의 형태인 단일 가스 통로만을 포함한다.
구현 예 13, 구현 예 1의 장치에 있어서, 제 1 갭은 터렛 둘레로 0.5 ㎜ 내지 5 ㎜이다.
구현 예 14, 구현 예 1의 장치는, 벨로우즈를 더 포함하고, 벨로우즈의 제 1 단부는 베이스 내에 위치된 터렛의 단부에 대해 고정되고, 제 1 단부 반대편의 벨로우즈의 제 2 단부는 어퍼처로부터 베이스의 반대편 측면 상의 베이스의 표면에 대해 고정되고, 벨로우즈는 베이스의 표면으로부터 멀어지는 터렛의 병진에 응답하여 확장하고, 벨로우즈는 베이스의 표면을 향한 터렛의 병진에 응답하여 수축한다.
구현 예 15, 구현 예 14의 장치에 있어서, 벨로우즈는 제 1 축을 따라 볼 때 제 1 평균 인클로징된 단면적을 갖고, 터렛의 제 1 부분의 최외곽 표면 또는 표면들은 제 1 축을 따라 볼 때 제 2 평균 단면적을 규정하고, 그리고 제 1 평균 인클로징된 단면적은 제 2 평균 단면적과 실질적으로 동일하다.
구현 예 16, 구현 예 14의 장치에 있어서, 터렛의 제 1 부분은 공칭적으로 원형이고 그리고 제 1 공칭 직경을 갖고, 벨로우즈는 복수의 플리트들을 갖고, 플리트 각각은 내경 및 외경을 갖고, 그리고 플리트들의 내경들 및 외경들의 평균은 제 1 공칭 직경과 실질적으로 동일하다.
구현 예 17, 구현 예 14의 장치에 있어서, 베이스는 베이스의 표면 내에 그리고 제 1 축을 따라 볼 때 벨로우즈에 의해 둘러싸인 영역 내에 하나 이상의 벤트들을 갖는다.
구현 예 18, 장치는, 하나 이상의 로봇 암들, 하나 이상의 로봇 암들을 지지하는 터렛, 터렛을 지지하는 선형 병진 메커니즘, 벨로우즈 및 선형 병진 메커니즘을 지지하는 베이스를 포함하고, 선형 병진 메커니즘은 베이스에 대해 제 1 축을 따라, 터렛뿐만 아니라 하나 이상의 로봇 암들을 병진하도록 구성되고, 베이스는 터렛이 제 1 축을 따라 병진될 때, 터렛의 적어도 제 1 부분으로 하여금 이를 통해 통과하게 하도록 사이징된 어퍼처를 포함하는 장치로서, 벨로우즈의 제 1 단부는 베이스 내에 위치된 터렛의 단부에 대해 고정되고, 벨로우즈의 제 1 단부 반대편의 벨로우즈의 제 2 단부는 어퍼처로부터 베이스의 반대편 측면 상의 베이스의 표면에 대해 고정되고, 벨로우즈는 베이스의 표면으로부터 멀어지는 터렛의 병진에 응답하여 확장하고, 그리고 벨로우즈는 베이스의 표면을 향한 터렛의 병진에 응답하여 수축한다.
구현 예 19, 구현 예 18의 장치에 있어서, 베이스의 제 1 표면 반대편에 베이스의 제 2 표면과 터렛을 연결하는 벨로우즈가 없다.
구현 예 20, 구현 예 18의 장치에 있어서, 상기 벨로우즈는 제 1 축을 따라 볼 때 제 1 평균 둘러싸인 단면적을 갖고, 터렛의 제 1 부분의 표면들 또는 제 1 부분의 표면들은 상기 제 1 축을 따라 볼 때 제 2 평균 단면적을 규정 제 1 축이고, 제 1 평균 둘러싸인 단면적은 제 2 평균 단면적과 실질적으로 동일하다.
구현 예 21, 구현 예 18의 장치에 있어서, 상기 터렛의 제 1 부분은 공칭적으로 원형이고 제 1 공칭 직경을 갖고, 벨로우즈는 복수의 플리트들을 갖고, 플리트 각각은 내경 및 외경을 갖고, 그리고 내경들의 평균을 갖는다. 그리고 주름들의 외경들은 제 1 공칭 직경과 실질적으로 동일하다.
구현 예 22, 구현 예 18의 장치에 있어서, 베이스는 베이스의 표면 내에 그리고 제 1 축을 따라 볼 때 벨로우즈에 의해 둘러싸인 영역 내에 하나 이상의 벤트들을 갖는다.
구현 예 23, 구현 예 18의 장치에 있어서, 어퍼처는 실질적으로 모든 어퍼처 둘레로 연장하는 하나 이상의 방사상 가스 통로들을 갖고, 하나 이상의 방사상 가스 통로들은 사이즈가 고정되고, 제 1 갭은 어퍼처의 내부 에지와 터렛의 제 1 부분 사이에 존재하고, 그리고 제 1 갭은 터렛의 상기 제 1 부분의 외측 주변부 둘레로 연장한다.
구현 예 24, 구현 예 23의 장치에 있어서, 터렛의 제 1 부분과 어퍼처의 내부 에지 사이의 제 1 갭은 어떠한 개입 구조체도 없다.
구현 예 25, 구현 예 23의 장치에 있어서, 하나 이상의 방사상 가스 통로들은 제 1 축에 평행한 방향으로 1 ㎜ 미만인 최소 폭을 갖는다.
구현 예 26, 구현 예 23의 장치에 있어서, 하나 이상의 방사상 가스 통로들은 제 1 축에 평행한 방향으로 0.5 ㎜ 미만인 최소 폭을 갖는다.
구현 예 27, 구현 예 23의 장치에 있어서, 하나 이상의 방사상 가스 통로들은 제 1 축에 평행한 방향으로 0.25 ㎜ 이하인 최소 폭을 갖는다.
구현 예 28, 구현 예 23의 장치에 있어서, 하나 이상의 방사상 가스 통로들은 하나 이상의 제 1 표면들 및 하나 이상의 제 2 표면들에 의해 적어도 부분적으로 규정되고, 그리고 하나 이상의 제 1 표면들은 하나 이상의 제 2 표면들을 향해 대면하고 그리고 제 2 갭에 의해 하나 이상의 제 2 표면들로부터 분리된다.
구현 예 29, 구현 예 28의 장치에 있어서, 하나 이상의 제 1 표면들 및 하나 이상의 제 2 표면들은 제 1 축에 수직이다.
구현 예 30, 구현 예 28의 장치에 있어서, 하나 이상의 제 1 표면들 각각은 제 1 축에 평행하고 어퍼처 상에 센터링된 제 2 축에 대해 제 1 단면 방사상 프로파일을 규정하고, 하나 이상의 제 2 표면들 각각은 제 2 축에 대해 제 2 단면 방사상 프로파일을 규정하고, 하나 이상의 제 1 단면 방사상 프로파일들 및 하나 이상의 제 2 단면 방사상 프로파일들을 포함하는 단면 방사상 프로파일들은 각각 제 2 축과 일치하고 평행한 대응하는 평면 내에 있고, 제 1 단면 방사상 프로파일 각각은 제 2 축에 수직의 ± 30 ° 이내인 평균 제 1 선형 방사상 프로파일을 규정하고, 그리고 제 2 단면 방사상 프로파일 각각은 제 2 축에 수직의 ± 30 ° 이내인 평균 제 2 선형 방사상 프로파일을 규정한다.
구현 예 31, 구현 예 23의 장치는, 하나 이상의 플레넘 볼륨들; 하나 이상의 가스 유입구들; 및 하나 이상의 가스 유입구들로의 가스의 플로우를 조절하도록 구성된 하나 이상의 플로우 제어 컴포넌트들을 더 포함하고, 가스 유입구 각각은 하나 이상의 플레넘 볼륨들 중 하나와 유체적으로 연통되고, 하나 이상의 플레넘 볼륨들 각각은 하나 이상의 가스 유입구들 중 적어도 하나와 유체적으로 연통되고, 하나 이상의 가스 유입구들 각각은 하나 이상의 플레넘 볼륨들 중 하나와 하나 이상의 플로우 제어 컴포넌트들 중 하나 사이에 유체적으로 개재되고, 그리고 하나 이상의 플레넘 볼륨들 각각은 하나 이상의 가스 유입구들 중 하나와 하나 이상의 방사상 가스 통로들 사이에 유체적으로 개재된다.
구현 예 32, 구현 예 31의 장치에 있어서, 하나 이상의 가스 소스들을 더 포함하고, 하나 이상의 플로우 제어 컴포넌트들은 하나 이상의 가스 소스들과 유체적으로 연통되고 그리고 하나 이상의 가스 소스들로부터의 가스로 하여금 분당 25 내지 150 표준 리터의 레이트로 하나 이상의 플레넘 볼륨들로 제공되게 하도록 구성되고 그리고 하나 이상의 방사상 가스 통로들은 하나 이상의 플레넘 볼륨들로부터의 가스가 적어도 5 ㎧의 속도로 하나 이상의 방사상 가스 통로들로부터 흐르도록 사이징된다.
구현 예 33, 구현 예 23의 장치에 있어서, 터렛의 제 1 부분은 제 1 공칭적으로 원형인 단면을 갖고 그리고 어퍼처는 제 1 공칭적으로 원형인 단면의 직경보다 보다 큰 직경을 갖는 대응하는 제 2 공칭적으로 원형인 단면을 갖는다.
구현 예 34, 구현 예 23의 장치에 있어서, 하나 이상의 방사상 가스 통로들은 연속성의 어떠한 중단들도 없이 전체 어퍼처 둘레로 연장하는 방사상 슬릿의 형태인 단일 가스 통로만을 포함한다.
구현 예 35, 구현 예 23의 장치에 있어서, 제 1 갭은 터렛 둘레로 0.5 ㎜ 내지 5 ㎜이다.
Claims (17)
- 하나 이상의 로봇 암들 (arms);
상기 하나 이상의 로봇 암들을 지지하는 터렛 (turret);
상기 터렛을 지지하는 선형 병진 (linear translation) 메커니즘; 및
상기 선형 병진 메커니즘을 지지하는 베이스를 포함하고,
상기 선형 병진 메커니즘은 상기 베이스에 대해 제 1 축을 따라, 상기 터렛뿐만 아니라 상기 하나 이상의 로봇 암들을 병진하도록 구성되고,
상기 베이스는 상기 터렛이 상기 제 1 축을 따라 병진될 때 상기 터렛의 적어도 제 1 부분으로 하여금 이를 통해 통과하게 하도록 사이징된 (sized) 어퍼처 (aperture) 를 포함하고,
상기 어퍼처는 실질적으로 모든 어퍼처 둘레로 연장하는 하나 이상의 방사상 가스 통로들을 갖고,
상기 하나 이상의 방사상 가스 통로들은 사이즈가 고정되고,
제 1 갭 (gap) 이 상기 어퍼처의 내부 에지와 상기 터렛의 상기 제 1 부분 사이에 존재하고, 그리고
상기 제 1 갭은 상기 터렛의 상기 제 1 부분의 외측 주변부 둘레로 연장하는, 장치. - 제 1 항에 있어서,
상기 터렛의 상기 제 1 부분과 상기 어퍼처의 상기 내부 에지 사이의 상기 제 1 갭은 실질적으로 모든 상기 터렛 둘레에 어떠한 개입 구조체 (intervening structure) 도 없는, 장치. - 제 1 항에 있어서,
상기 하나 이상의 방사상 가스 통로들은 상기 제 1 축에 평행한 방향으로 1 ㎜ 미만인 최소 폭을 갖는, 장치. - 제 1 항에 있어서,
상기 하나 이상의 방사상 가스 통로들은 상기 제 1 축에 평행한 방향으로 0.5 ㎜ 미만인 최소 폭을 갖는, 장치. - 제 1 항에 있어서,
상기 하나 이상의 방사상 가스 통로들은 상기 제 1 축에 평행한 방향으로 0.25 ㎜ 이하인 최소 폭을 갖는, 장치. - 제 1 항에 있어서,
하나 이상의 방사상 가스 통로들은 하나 이상의 제 1 표면들 및 하나 이상의 제 2 표면들에 의해 적어도 부분적으로 규정되고, 그리고
상기 하나 이상의 제 1 표면들은 상기 하나 이상의 제 2 표면들을 향해 대면하고 그리고 제 2 갭에 의해 상기 하나 이상의 제 2 표면들로부터 분리되는, 장치. - 제 6 항에 있어서,
상기 하나 이상의 제 1 표면들 및 상기 하나 이상의 제 2 표면들은 상기 제 1 축에 수직인, 장치. - 제 6 항에 있어서,
상기 하나 이상의 제 1 표면들 각각은 상기 제 1 축에 평행하고 상기 어퍼처 상에 센터링된 (center) 제 2 축에 대해 제 1 단면 방사상 프로파일을 규정하고,
상기 하나 이상의 제 2 표면들 각각은 상기 제 2 축에 대해 제 2 단면 방사상 프로파일을 규정하고,
상기 하나 이상의 제 1 단면 방사상 프로파일들 및 상기 하나 이상의 제 2 단면 방사상 프로파일들을 포함하는 상기 단면 방사상 프로파일들은 각각 상기 제 2 축과 일치하고 평행한 대응하는 평면 내에 있고,
상기 제 1 단면 방사상 프로파일 각각은 상기 제 2 축에 수직의 ± 30 ° 이내인 평균 제 1 선형 방사상 프로파일을 규정하고, 그리고
상기 제 2 단면 방사상 프로파일 각각은 상기 제 2 축에 수직의 ± 30 ° 이내인 평균 제 2 선형 방사상 프로파일을 규정하는, 장치. - 제 1 항에 있어서,
하나 이상의 플레넘 볼륨들 (plenum volumes);
하나 이상의 가스 유입구들; 및
상기 하나 이상의 가스 유입구들로의 가스의 플로우를 조절하도록 구성된 하나 이상의 플로우 제어 컴포넌트들 (flow control components) 을 더 포함하고,
가스 유입구 각각은 상기 하나 이상의 플레넘 볼륨들 중 하나와 유체적으로 연통되고 (fluidically connect),
상기 하나 이상의 플레넘 볼륨들 각각은 상기 하나 이상의 가스 유입구들 중 적어도 하나와 유체적으로 연통되고,
상기 하나 이상의 가스 유입구들 각각은 상기 하나 이상의 플레넘 볼륨들 중 하나와 상기 하나 이상의 플로우 제어 컴포넌트들 중 하나 사이에 유체적으로 개재되고 (fluidically interpose), 그리고
상기 하나 이상의 플레넘 볼륨들 각각은 상기 하나 이상의 가스 유입구들 중 하나와 상기 하나 이상의 방사상 가스 통로들 사이에 유체적으로 개재되는, 장치. - 제 9 항에 있어서,
하나 이상의 가스 소스들 (sources) 을 더 포함하고,
상기 하나 이상의 플로우 제어 컴포넌트들은 상기 하나 이상의 가스 소스들과 유체적으로 연통되고 그리고 상기 하나 이상의 가스 소스들로부터의 가스로 하여금 분당 25 내지 150 표준 리터의 레이트로 상기 하나 이상의 플레넘 볼륨들로 제공되게 하도록 구성되고 그리고 상기 하나 이상의 방사상 가스 통로들은 상기 하나 이상의 플레넘 볼륨들로부터의 상기 가스가 적어도 5 ㎧의 속도로 상기 하나 이상의 방사상 가스 통로들로부터 흐르도록 사이징되는, 장치. - 제 1 항에 있어서,
상기 터렛의 상기 제 1 부분은 제 1 공칭적으로 원형인 단면을 갖고 그리고 상기 어퍼처는 상기 제 1 공칭적으로 원형인 단면의 직경보다 보다 큰 직경을 갖는 대응하는 제 2 공칭적으로 원형인 단면을 갖는, 장치. - 제 1 항에 있어서,
상기 하나 이상의 방사상 가스 통로들은 연속성의 어떠한 중단들도 없이 상기 전체 어퍼처 둘레로 연장하는 방사상 슬릿의 형태인 단일 가스 통로만을 포함하는, 장치. - 제 1 항에 있어서,
상기 제 1 갭은 상기 터렛 둘레로 0.5 mm 내지 5 mm인, 장치. - 제 1 항에 있어서,
벨로우즈 (bellows) 를 더 포함하고,
상기 벨로우즈의 제 1 단부는 상기 베이스 내에 위치된 상기 터렛의 단부에 대해 고정되고,
상기 제 1 단부 반대편의 상기 벨로우즈의 제 2 단부는 상기 어퍼처로부터 상기 베이스의 반대편 측면 상의 상기 베이스의 표면에 대해 고정되고,
상기 벨로우즈는 상기 베이스의 상기 표면으로부터 멀어지는 상기 터렛의 병진에 응답하여 확장하고,
상기 벨로우즈는 상기 베이스의 상기 표면을 향한 상기 터렛의 병진에 응답하여 수축하는, 장치. - 제 14 항에 있어서,
상기 벨로우즈는 상기 제 1 축을 따라 볼 때 제 1 평균 인클로징된 (enclose) 단면적을 갖고,
상기 터렛의 상기 제 1 부분의 최외곽 표면 또는 표면들은 상기 제 1 축을 따라 볼 때 제 2 평균 단면적을 규정하고, 그리고
상기 제 1 평균 인클로징된 단면적은 상기 제 2 평균 단면적과 실질적으로 동일한, 장치. - 제 14 항에 있어서,
상기 터렛의 상기 제 1 부분은 공칭적으로 원형이고 그리고 제 1 공칭 직경을 갖고,
상기 벨로우즈는 복수의 플리트들 (pleats) 을 갖고,
플리트 각각은 내경 및 외경을 갖고, 그리고
상기 플리트들의 내경들 및 외경들의 평균은 상기 제 1 공칭 직경과 실질적으로 동일한, 장치. - 제 14 항에 있어서,
상기 베이스는 상기 베이스의 상기 표면 내에 그리고 상기 제 1 축을 따라 볼 때 상기 벨로우즈에 의해 둘러싸인 (encircle) 영역 내에 하나 이상의 벤트들 (vents) 을 갖는, 장치.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US202062982626P | 2020-02-27 | 2020-02-27 | |
| US62/982,626 | 2020-02-27 | ||
| PCT/US2021/019264 WO2021173568A1 (en) | 2020-02-27 | 2021-02-23 | Wafer handling robot with radial gas curtain and/or interior volume control |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20220146594A true KR20220146594A (ko) | 2022-11-01 |
Family
ID=77492125
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020227033506A KR20220146594A (ko) | 2020-02-27 | 2021-02-23 | 방사상 가스 커튼 및/또는 내부 볼륨 제어를 갖는 웨이퍼 핸들링 로봇 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11833662B2 (ko) |
| JP (1) | JP2023516944A (ko) |
| KR (1) | KR20220146594A (ko) |
| CN (1) | CN115427198A (ko) |
| TW (1) | TW202146190A (ko) |
| WO (1) | WO2021173568A1 (ko) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7561568B2 (ja) | 2020-10-19 | 2024-10-04 | ニデックインスツルメンツ株式会社 | 産業用ロボット |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60189219A (ja) * | 1984-03-08 | 1985-09-26 | Matsushita Electric Ind Co Ltd | 回転サセプタ支持装置 |
| JP3638393B2 (ja) | 1997-03-04 | 2005-04-13 | 大日本スクリーン製造株式会社 | 基板処理装置 |
| US6352265B1 (en) * | 1999-05-26 | 2002-03-05 | Brooks Automation, Inc. | Seal ring using gas curtain |
| JP2001300883A (ja) * | 2000-04-20 | 2001-10-30 | Kawasaki Heavy Ind Ltd | ロボット |
| JP3983481B2 (ja) | 2001-01-31 | 2007-09-26 | 東京エレクトロン株式会社 | 基板処理装置及び基板処理装置における基板搬送方法 |
| JP5364769B2 (ja) | 2011-09-26 | 2013-12-11 | 株式会社安川電機 | 搬送ロボットおよび基板処理装置 |
| TWI725303B (zh) | 2012-02-10 | 2021-04-21 | 美商布魯克斯自動機械公司 | 基材處理設備 |
| JP5500206B2 (ja) * | 2012-06-01 | 2014-05-21 | 株式会社安川電機 | 搬送ロボットおよび搬送ロボットを備えた局所クリーン装置 |
| JP6120031B2 (ja) | 2016-01-20 | 2017-04-26 | セイコーエプソン株式会社 | 部品検査装置、及び、ハンドラー |
| JP7480635B2 (ja) * | 2020-08-21 | 2024-05-10 | 東京エレクトロン株式会社 | 基板を搬送する装置、基板を処理するシステム、及び基板を処理する方法 |
| JP7561568B2 (ja) * | 2020-10-19 | 2024-10-04 | ニデックインスツルメンツ株式会社 | 産業用ロボット |
-
2021
- 2021-02-23 JP JP2022551599A patent/JP2023516944A/ja active Pending
- 2021-02-23 US US17/802,137 patent/US11833662B2/en active Active
- 2021-02-23 CN CN202180030454.1A patent/CN115427198A/zh active Pending
- 2021-02-23 KR KR1020227033506A patent/KR20220146594A/ko unknown
- 2021-02-23 WO PCT/US2021/019264 patent/WO2021173568A1/en active Application Filing
- 2021-02-26 TW TW110106997A patent/TW202146190A/zh unknown
Also Published As
| Publication number | Publication date |
|---|---|
| CN115427198A (zh) | 2022-12-02 |
| WO2021173568A1 (en) | 2021-09-02 |
| TW202146190A (zh) | 2021-12-16 |
| US11833662B2 (en) | 2023-12-05 |
| US20230074285A1 (en) | 2023-03-09 |
| JP2023516944A (ja) | 2023-04-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9472432B1 (en) | Dedicated hot and cold end effectors for improved throughput | |
| US11764086B2 (en) | Wafer transport assembly with integrated buffers | |
| US11472002B2 (en) | Substrate polishing apparatus | |
| US20140263165A1 (en) | Processing systems, apparatus, and methods adapted to process substrates in electronic device manufacturing | |
| KR102706036B1 (ko) | 기판 이송 챔버 이동 | |
| TWI533947B (zh) | 降低基板上粒子污染的系統及方法 | |
| KR20130135720A (ko) | 반송 로봇 및 반송 로봇을 구비한 설비 전방 단부 모듈 | |
| KR102626528B1 (ko) | 국소 퍼지 기능을 갖는 반송 장치 | |
| TWI509724B (zh) | 用於處理工具中之小微粒計數的氣流管理 | |
| KR20220146594A (ko) | 방사상 가스 커튼 및/또는 내부 볼륨 제어를 갖는 웨이퍼 핸들링 로봇 | |
| JP2001102426A (ja) | 物品容器開閉・転送装置および物品容器開閉・転送方法 | |
| JPH09330972A (ja) | 基板搬送装置 | |
| US11728205B2 (en) | Device for transferring substrate, system for processing substrate, and method of processing substrate | |
| JP5456804B2 (ja) | 搬送容器 | |
| KR20150059704A (ko) | 설비 전방 단부 모듈 | |
| JP2015109355A (ja) | 局所クリーン化搬送装置 | |
| KR102418934B1 (ko) | 기판 처리 장치 | |
| JP7316102B2 (ja) | ウエハ搬送装置 | |
| US20240279003A1 (en) | Wafer transfer apparatus, wafer transfer system, and method for removing particles in wafer transfer apparatus | |
| US20230040192A1 (en) | Wet clean spray process chamber for substrates | |
| KR20230135559A (ko) | 진공 처리 장치 | |
| KR20230111298A (ko) | Efem의 기류 안정화 배기장치 및 이를 구비한 반도체 공정장치 | |
| JP2022045904A (ja) | 基板処理装置および基板処理方法 | |
| CN115735271A (zh) | 批量晶片脱气腔室以及整合到工厂接口和基于真空的主机中 | |
| KR20240022806A (ko) | 포커스링의 위치를 조절할 수 있는 웨이퍼 처리 장치 |