KR20200054326A - 경도 그리드 패턴을 사용한 거리 측정 - Google Patents
경도 그리드 패턴을 사용한 거리 측정 Download PDFInfo
- Publication number
- KR20200054326A KR20200054326A KR1020207013018A KR20207013018A KR20200054326A KR 20200054326 A KR20200054326 A KR 20200054326A KR 1020207013018 A KR1020207013018 A KR 1020207013018A KR 20207013018 A KR20207013018 A KR 20207013018A KR 20200054326 A KR20200054326 A KR 20200054326A
- Authority
- KR
- South Korea
- Prior art keywords
- projection
- pattern
- point
- artifacts
- line
- Prior art date
Links
- 238000005259 measurement Methods 0.000 title description 5
- 238000000034 method Methods 0.000 claims description 36
- 238000003860 storage Methods 0.000 claims description 13
- 230000003287 optical effect Effects 0.000 claims description 12
- 238000007493 shaping process Methods 0.000 claims 1
- 238000010586 diagram Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 238000003384 imaging method Methods 0.000 description 3
- 230000009286 beneficial effect Effects 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
Images




















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
- G01B11/026—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness by measuring distance between sensor and object
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
- G01B11/2513—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object with several lines being projected in more than one direction, e.g. grids, patterns
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C3/00—Measuring distances in line of sight; Optical rangefinders
- G01C3/02—Details
- G01C3/06—Use of electric means to obtain final indication
- G01C3/08—Use of electric radiation detectors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4814—Constructional features, e.g. arrangements of optical elements of transmitters alone
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/497—Means for monitoring or calibrating
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/521—Depth or shape recovery from laser ranging, e.g. using interferometry; from the projection of structured light
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10028—Range image; Depth image; 3D point clouds
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Computer Networks & Wireless Communication (AREA)
- Optics & Photonics (AREA)
- Theoretical Computer Science (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Measurement Of Optical Distance (AREA)
- Image Analysis (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
- Radar Systems Or Details Thereof (AREA)
- Automatic Focus Adjustment (AREA)
Abstract
투영 지점으로부터 복수의 광 빔들을 투영함으로써 거리의 투영 지점으로부터 물체의 표면 상에 투영 패턴이 투영된다. 복수의 광 빔들은 물체의 표면 상에 그리드로 배열된 복수의 투영 아티팩트들을 생성한다. 중심 투영 아티팩트는 그리드 경로 라인과 그리드 위도 라인의 교차점에 놓여있다. 복수의 빔들의 투영이 조정되어, 경도 라인 및/또는 위도 라인이 원래 위치로부터 새로운 위치로 미리 결정된 양만큼 회전되고 조정된 투영 패턴이 상기 물체의 표면 상에 있게 된다. 조정된 투영 패턴의 적어도 일부를 포함하는 물체의 이미지가 캡처된다. 거리 센서로부터 물체까지의 거리가 이미지로부터의 정보를 사용하여 계산된다.
Description
관련 출원들의 교차 참조
본 출원은 2017년 10월 8일자로 출원된 미국 가특허출원 번호 62/569,543의 우선권을 주장하며, 그 전문이 본원에 참조로 포함된다.
본 발명은 경도 그리드 패턴을 이용하는 거리 측정을 위한 장치, 방법, 및 비-일시적 컴퓨터 판독 가능한 매체에 관한 것이다.
미국 특허 출원 번호 14/920,246, 15/149,323 및 15/149,429는 거리 센서들의 다양한 구성들을 기술한다. 그러한 거리 센서들은 보안, 게임, 무인 차량들의 제어, 및 기타 애플리케이션들을 포함한 다양한 애플리케이션들에 유용할 수 있다.
이들 출원들에 기술된 거리 센서들은 광원들(예를 들어, 레이저들), 회절 광학 요소들 및/또는 시야(a field of view) 내에 패턴(예를 들어, 도트, 대시 또는 다른 아티팩트들의 패턴)을 생성하는 광 빔들을 투영하도록 협력하는 다른 구성요소들을 포함한다. 상기 패턴이 시야 내의 물체에 입사될 때, 센서로부터 물체까지의 거리는 시야의 하나 이상의 이미지들에서 패턴의 외관(예를 들어, 도트, 대시 또는 다른 아티팩트들의 위치 관계들)에 기초하여 계산될 수 있다. 물체의 모양들과 치수들도 또한 결정될 수 있다.
경도 그리드 패턴을 이용하는 거리 측정에 따른 종래 기술의 문제점들을 극복 및 개선할 수 있는 구성을 제공한다.
일례에서, 방법은 거리 센서의 투영 지점으로부터 물체의 표면 상에 투영 패턴을 투영하는 단계로서, 상기 투영 패턴은 상기 투영 지점으로부터 투영된 복수의 광 빔들에 의해 생성되고, 상기 복수의 광 빔들은 상기 물체의 표면 상에 그리드(grid)로 배열된 복수의 투영 아티팩트들(projection artifacts)을 생성하고, 상기 복수의 투영 아티팩트들의 중심 투영 아티팩트는 상기 그리드의 경도 라인(longitude line)과 상기 그리드의 위도 라인(latitude line)의 교차점에 놓이는, 상기 투영 패턴을 투영하는 단계, 상기 경도 라인과 상기 위도 라인 중 적어도 하나가 원래 위치로부터 새로운 위치로 미리 결정된 양만큼 회전되어 조정된 투영 패턴이 상기 물체의 표면 상에 투영되도록 상기 복수의 빔들의 투영을 조정하는 단계, 상기 조정된 투영 패턴의 적어도 일부를 포함하는 상기 물체의 이미지를 캡처하는 단계, 및 상기 이미지로부터의 정보를 사용하여 상기 거리 센서로부터 상기 물체까지의 거리를 계산하는 단계를 포함한다.
또다른 예에서, 비-일시적 기계 판독 가능한 저장 매체는 프로세서에 의해 실행 가능한 명령들로 인코딩되며, 여기서 상기 명령들은 실행될 때 상기 프로세서로 하여금 동작들을 수행하게 한다. 상기 동작들은 거리 센서의 투영 지점으로부터 물체의 표면 상에 투영 패턴을 투영하는 동작으로서, 상기 투영 패턴은 상기 투영 지점으로부터 투영된 복수의 광 빔들에 의해 생성되고, 상기 복수의 광 빔들은 상기 물체의 표면 상에 그리드(grid)로 배열된 복수의 투영 아티팩트들(projection artifacts)을 생성하고, 상기 복수의 투영 아티팩트들의 중심 투영 아티팩트는 상기 그리드의 경도 라인(longitude line)과 상기 그리드의 위도 라인(latitude line)의 교차점에 놓이는, 상기 투영 패턴을 투영하는 동작, 상기 경도 라인과 상기 위도 라인 중 적어도 하나가 원래 위치로부터 새로운 위치로 미리 결정된 양만큼 회전되어 조정된 투영 패턴이 상기 물체의 표면 상에 투영되도록 상기 복수의 빔들의 투영을 조정하는 동작, 상기 조정된 투영 패턴의 적어도 일부를 포함하는 상기 물체의 이미지를 캡처하는 동작, 및 상기 이미지로부터의 정보를 사용하여 상기 거리 센서로부터 상기 물체까지의 거리를 계산하는 동작을 포함한다.
도 1은 거리 센서의 요소들을 도시한 개략도이다.
도 2는 거리 센서의 투영 지점에 의해 투영된 예시적인 패턴의 일부인 복수의 도트들에 대한 궤적들을 도시한다.
도 3a는 투영 지점으로부터 투영된 빔들의 배열의 일례의 측면도를 도시한다.
도 3b는 도 3a의 빔들의 배열에 의해 생성된 투영 패턴의 정면도를 도시한다.
도 3c는 도 3a 및 도 3b에 도시된 투영 패턴의 단순화된 등측도를 도시한다.
도 3d는 반구형 시야에서 도 3a 내지 도 3c의 투영 패턴의 일반적인 형상을 도시한다.
도 4a는 투영 지점으로부터 투영된 빔들의 배열의 일례의 측면도를 도시한다.
도 4b는 도 4a의 빔들의 배열에 의해 생성된 투영 패턴(402)의 정면도를 도시한다.
도 4c는 도 4a 및 도 4b의 패턴이 평평한 표면 상에 투영될 때 도 4a 및 4b의 투영 아티팩트들의 궤적들의 정면도를 도시한다.
도 5a는 투영 지점으로부터 투영된 빔들의 배열의 일례의 측면도를 도시한다.
도 5b는 도 5a의 빔들의 배열에 의해 생성된 투영 패턴의 정면도를 도시한다.
도 5c는 평평한 표면 상에 투영된 도 5a 및 도 5b의 투영 패턴의 측면도를 도시한다.
도 5d는 평평한 표면 상에 투영된 도 5a 및 도 5b의 투영 패턴의 정면도를 도시한다.
도 5e는 도 5a 내지 도 5d의 패턴이 평평한 표면 상에 투영될 때 도 5a 내지 도 5d의 투영 아티팩트들의 궤적들의 정면도를 도시한다.
도 5f는 반구형 시야에서 도 5a 내지 5e의 투영 패턴의 일반적인 형상을 도시한다.
도 6a는 투영 지점으로부터 투영된 빔들의 배열의 일례의 측면도를 도시한다.
도 6b는 도 6a의 빔들의 배열에 의해 생성된 투영 패턴의 정면도를 도시한다.
도 6c는 평평한 표면 상에 투영된 도 6a 및 도 6b의 투영 패턴의 측면도를 도시한다.
도 6d는 평평한 표면 상에 투영된 도 6a 및 도 6b의 투영 패턴의 정면도를 도시한다.
도 6e는 도 6a 내지 도 6d의 패턴이 평평한 표면 상에 투영될 때 도 6a 내지 도 6d의 투영 아티팩트들의 궤적들의 정면도를 도시한다.
도 7은 본 개시의 예시적인 투영 빔 정렬을 도시한다.
도 8은 센서로부터 물체까지의 거리를 계산하기 위한 예시적인 방법의 흐름도를 도시한다.
도 9는 센서로부터 물체까지의 거리를 계산하기 위한 예시적인 전자 디바이스의 하이 레벨 블록도를 도시한다.
도 2는 거리 센서의 투영 지점에 의해 투영된 예시적인 패턴의 일부인 복수의 도트들에 대한 궤적들을 도시한다.
도 3a는 투영 지점으로부터 투영된 빔들의 배열의 일례의 측면도를 도시한다.
도 3b는 도 3a의 빔들의 배열에 의해 생성된 투영 패턴의 정면도를 도시한다.
도 3c는 도 3a 및 도 3b에 도시된 투영 패턴의 단순화된 등측도를 도시한다.
도 3d는 반구형 시야에서 도 3a 내지 도 3c의 투영 패턴의 일반적인 형상을 도시한다.
도 4a는 투영 지점으로부터 투영된 빔들의 배열의 일례의 측면도를 도시한다.
도 4b는 도 4a의 빔들의 배열에 의해 생성된 투영 패턴(402)의 정면도를 도시한다.
도 4c는 도 4a 및 도 4b의 패턴이 평평한 표면 상에 투영될 때 도 4a 및 4b의 투영 아티팩트들의 궤적들의 정면도를 도시한다.
도 5a는 투영 지점으로부터 투영된 빔들의 배열의 일례의 측면도를 도시한다.
도 5b는 도 5a의 빔들의 배열에 의해 생성된 투영 패턴의 정면도를 도시한다.
도 5c는 평평한 표면 상에 투영된 도 5a 및 도 5b의 투영 패턴의 측면도를 도시한다.
도 5d는 평평한 표면 상에 투영된 도 5a 및 도 5b의 투영 패턴의 정면도를 도시한다.
도 5e는 도 5a 내지 도 5d의 패턴이 평평한 표면 상에 투영될 때 도 5a 내지 도 5d의 투영 아티팩트들의 궤적들의 정면도를 도시한다.
도 5f는 반구형 시야에서 도 5a 내지 5e의 투영 패턴의 일반적인 형상을 도시한다.
도 6a는 투영 지점으로부터 투영된 빔들의 배열의 일례의 측면도를 도시한다.
도 6b는 도 6a의 빔들의 배열에 의해 생성된 투영 패턴의 정면도를 도시한다.
도 6c는 평평한 표면 상에 투영된 도 6a 및 도 6b의 투영 패턴의 측면도를 도시한다.
도 6d는 평평한 표면 상에 투영된 도 6a 및 도 6b의 투영 패턴의 정면도를 도시한다.
도 6e는 도 6a 내지 도 6d의 패턴이 평평한 표면 상에 투영될 때 도 6a 내지 도 6d의 투영 아티팩트들의 궤적들의 정면도를 도시한다.
도 7은 본 개시의 예시적인 투영 빔 정렬을 도시한다.
도 8은 센서로부터 물체까지의 거리를 계산하기 위한 예시적인 방법의 흐름도를 도시한다.
도 9는 센서로부터 물체까지의 거리를 계산하기 위한 예시적인 전자 디바이스의 하이 레벨 블록도를 도시한다.
본 개시는 경도 그리드 패턴을 이용하는 거리 측정을 위한 장치, 방법, 및 비-일시적 컴퓨터 판독 가능한 매체를 광범위하게 기술한다. 전술한 바와 같이, 미국 특허 출원 번호 14/920,246, 15/149,323 및 15/149,429에 기재된 것들과 같은 거리 센서들은 물체를 포함하는 시야(field of view) 내의 패턴(예를 들어, 도트, 대시 또는 다른 아티팩트들의 패턴)을 생성하는 광 빔들을 투영함으로써 물체까지의 거리 (및 잠재적으로는, 물체의 형상 및 치수들)을 결정한다. 일부 예들에서, 센서들은 다중의 "투영 지점들"을 포함하고, 여기서 복수의 빔들이 각각의 투영 지점으로부터 투영될 수 있다. 복수의 빔들은 패턴의 일부를 형성하도록 팬 아웃(fan out)될 수 있다. 패턴의 외관은 물체와의 거리에 따라 변할 수 있다. 실례로, 패턴이 도트 패턴을 포함하는 경우, 물체가 센서에 더 가까울 때 도트들이 서로 더 가깝게 나타날 수 있고, 물체가 센서로부터 더 멀어지면 서로 더 멀어지게 나타날 수 있다.
도 1은, 예를 들어, 미국 특허 출원 번호 14/920,246, 15/149,323 및 15/149,429에 기재된 센서들과 유사한 거리 센서의 요소들을 도시하는 개략도이다. 도시된 바와 같이, 센서는 이미지 캡처 디바이스의 렌즈(100)를 포함할 수 있다. 렌즈(100)의 시야는 f로 나타낼 수 있다. 센서는 또한 렌즈(100)의 둘레 주위에 배열된 복수의 투영 지점들(예를 들어, 광원들, 회절 광학 요소들 및/또는 다른 구성요소들에 의해 형성됨)을 포함할 수 있으며; 도 1은 하나의 그러한 투영 지점(102)을 도시하며, 여기서 다른 투영 지점들은 유사하게 구성될 수 있고 렌즈(100) 주위의 상이한 위치들에 배치될 수 있다. 렌즈(100)의 중심 축으로부터 투영 지점(102)의 중심 축까지의 거리(d)는 또한 센서의 "기준선"이라고 칭한다.
투영 지점(102)은 광의 복수의 빔들(1041 내지 104n)(이하, 개별적으로 "빔(104)" 또는 집합적으로 "빔들(104)"로 지칭됨)을 투영하며, 이들은 빔들(104)이 표면 상에 입사될 때 팬 아웃되어 투영 아티팩트들(예를 들어, 도트들, 대시들 등)의 패턴(106)을 형성한다. 패턴(106)의 평면은 센서의 기준선(d)과 평행할 수 있다. 도 1에 도시된 예에서, 투영 아티팩트들은 도트들이다. 도 1은 기준선(d)으로부터 제 1 거리(D1)에 나타나고, 또한 기준선(d)으로부터 제 2 거리(D2)에 나타나는 패턴(106)을 도시한다.
동일한 투영 지점(102)으로부터 투영된 모든 빔들(104)은 전술한 바와 같이 물체 거리에 따라 기준선(d)을 따라 동일한 방향으로 이동할 것이다. 그러나, 동일한 투영 지점(102)으로부터 투영된 빔들(104)의 수가 증가함에 따라, 빔들(104)에 의해 생성된 아티팩트들(예를 들어, 도트들)의 궤적들(즉, 이동 범위들)은 서로 더 가깝게 나타날 수 있고, 어떤 경우들에서는 심지어 중첩될 수도 있다.
투영 아티팩트의 궤적은 거리 센서의 투영 광학 시스템(예를 들어, 광원들, 회절 광학 요소들, 및 광 빔들을 투영하는 다른 구성요소들을 포함하는 일련의 광학 요소들)과 평면(예를 들어, 측면) 방향 및 높이 방향(예를 들어, 측면 방향에 수직인 방향)의 수광 광학 시스템(예를 들어, 렌즈, 이미지 캡처 디바이스, 및 투영 아티팩트들의 이미지들을 캡처하는 다른 구성요소들) 사이의 위치 관계에 의해 결정된다. 투영 아티팩트의 궤적은 방사상 패턴(radial pattern) 또는 라인으로 나타날 수 있으며, 센서와 투영 패턴이 투영되는 물체 사이의 거리가 변화함에 따라 투영 아티팩트의 움직임을 형성한다. 보다 구체적으로, 투영 아티팩트의 궤적은 거리 변화들이 있는 거리 센서의 이미지 캡처 디바이스에 대한 투영 아티팩트의 움직임을 형성한다.
도 2는 실례로, 거리 센서의 투영 지점(예를 들어, 도 1의 투영 지점(102))에 의해 투영되는 예시적인 패턴의 일부인 복수의 도트들에 대한 궤적들(200)을 도시한다. 음영이 없는 도트들은 센서 기준선으로부터 제 1 거리에 있는 도트들의 위치들을 나타내고, 음영이 있는 도트들은 센서 기준선으로부터 제 2 거리에 있는 도트들의 위치들을 나타낸다. 음영이 없는 도트를 음영이 있는 도트에 연결하는 라인 또는 궤적(200)은 음영이 없는 도트 및 음영이 있는 도트가 동일한 도트이고, 센서 기준선으로부터 다른 거리들에 도시된 것임을 나타낸다. 도 2에 도시된 바와 같이, 일부 도트들의 궤적들(200)은 중첩될 수 있다. 중첩하는 궤적들(200)은 원(202)에 의해 도시된다. 궤적들(200)의 중첩이 발생할 때, 투영 지점들로부터 투영된 어떠한 빔들이 투영 패턴의 어떤 도트들에 대응하는지를 결정하는 것이 어려울 수 있다. 결과적으로 이러한 것은 거리 측정 계산들을 복잡하게 할 수 있는데, 이는 정확한 계산들은 이미지에서 볼 수 있는 도트들을 생성한 빔들을 식별하는 기능에 의존할 수 있기 때문이다.
따라서, 거리 센서의 투영 지점으로부터 투영된 빔들의 수의 증가는, 빔들에 의해 생성된 투영 아티팩트들의 궤도들에서의 중첩하게 될 가능성을 증가시킬 수 있다(따라서, 거리 계산들의 난이도를 증가시킨다). 다른 한편, 많은 수의 빔들은 일반적으로 유익한 것으로 간주되는데, 이는 그러한 것이 거리 계산 목적으로 센서 시야의 보다 양호한 공간 커버리지를 제공하기 때문이다. 추가적인 고려 사항으로서, 제조 비용, 센서 크기, 및 구성요소 손상으로 인한 센서 고장을 최소화하기 위해 투영 지점들의 수를 최소로 유지하는 것이 바람직할 수 있다. 그렇긴 하지만, 더 적은 투영 지점들을 사용하여 공간 커버리지를 유지하기 위해서는, 투영 지점들부터 더 많은 수의 빔들을 투영해야 하는 것이 필요할 수도 있다.
본 개시의 예들은, 센서 투영 지점들로부터 투영된 빔들의 수가 증가함에 따라 투영 아티팩트 궤적들의 중첩을 최소화하는 거리 센서를 위한 빔 배열을 제공한다. 특히, 본 개시의 예들은 공간 커버리지에 대한 필요성과 투영 아티팩트 궤적들의 중첩을 최소화할 필요성의 균형을 맞추는 투영 아티팩트들의 분포를 갖는 패턴들을 제공한다. 개시된 패턴들의 예들은 각각의 투영 지점으로부터, 중심 빔으로부터 대칭적으로(적어도 x 및 y 방향에서) 팬 아웃되는 복수의 빔들을 투영함으로써 달성될 수 있다.
위에서 논의된 바와 같이, 투영 아티팩트의 궤적은 방사상 패턴 또는 라인으로 나타날 수 있다. 본 개시의 예들은 투영 아티팩트 궤적 및 복수의 프로젝션 아티팩트들을 포함하는 프로젝션 패턴의 라인들 모두가 선형으로 나타날 수 있다는 사실을 고려한다. 그와 같이, 투영 아티팩트와 거리 센서의 이미지 캡처 디바이스 사이의 위치 관계, 중심 투영 아티팩트의 방향, 또는 복수의 투영 아티팩트들에 의해 생성된 투영 패턴의 회전 위상은, 투영 패턴을 형성하는 복수의 투영 아티팩트들의 궤적들에서 중첩들을 최소화하도록 조정될 수 있다. 본 개시의 다른 예들은, 투영 패턴을 형성하는 평면이 곡선으로 될 때 투영 아티팩트 궤적과 투영 패턴의 라인들에 의해 형성된 각도가 점진적으로 변할 수 있으며, 이는 전체 투영 패턴에 걸친 궤적 중첩의 균일한 제거를 더욱 어렵게 한다는 사실을 고려한다.
본 개시의 예들은 일반적으로 직사각형 형상을 갖는 투영 패턴(즉, 복수의 투영 아티팩트들에 의해 생성된 패턴)을 설명하는데, 여기서 투영 아티팩트들은 복수의 행들과 열들로 배열된다. 이와 관련해서, 투영 패턴의 중심에 있는 투영 아티팩트는 투영 패턴의 "원점(origin)"으로 간주될 수 있다. 원점과 교차하는 행은 투영 패턴의 "위도(latitude)" 라인으로 지칭될 수 있는 반면에, 원점과 교차하는 열은 투영 패턴의 "경도(longitude)"라인으로 지칭될 수 있다. 본 개시의 다른 예들은 투영 지점으로부터 하나 이상의 빔들의 투영 각도를 조절할 수 있으며, 그에 따라 투영 패턴의 위도 및 경도 라인들 중 하나 이상이 투영 아티팩트 궤적들의 중첩을 최소화하는 조정된 투영 패턴을 달성하기 위해 미리 결정된 각도만큼 회전되도록 한다.
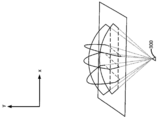
도 3a는 투영 지점(300)으로부터 투영된 빔들의 배열의 일례의 측면도를 도시한 반면, 도 3b는 도 3a의 빔들의 배열에 의해 생성된 투영 패턴(302)의 정면도를 도시한다. 도 3a 및 도 3b의 예에서, 빔들의 배열은 구형 표면(304), 즉 둥근(평평하지 않은) 형상을 갖는 표면 상에 투영된다.
도시된 바와 같이, 투영 지점(300)은 복수의 빔들(3061 내지 306m)(이하, 개별적으로 "빔(306)" 또는 집합적으로 "빔들(306)"이라고 칭함)을 투영한다. 복수의 빔들(306)은 중심 빔(306i)을 포함한다. 나머지 빔들(306)은 x 축을 따라 양방향으로 및 y 축을 따라 양방향으로 중심 빔(306i)으로부터 팬 아웃된다. 도면들을 단순화하기 위해, 제 1 빔(3061)과 중심 빔(306i) 사이 및 중심 빔(306i)과 마지막 빔(306m) 사이에 존재할 수 있는 빔들(306)은 도 3a에 도시되지 않았다.
복수의 빔들(306)에 의해 생성된 결과 패턴(302)은 도 3b에 도시된 바와 같이, 직사각형 그리드로 배열된 복수의 투영 아티팩트들(예를 들어, 도트들)을 포함한다. 그리드의 행들은 도시된 좌표계의 x 축을 따라 연장되는 반면, 그리드의 열들은 y 축을 따라 연장된다. 행들과 열들은 미리 정의된 규칙에 따른 간격들(예를 들어, 동일한 각도 간격, 동일한 사인 값 간격들 등)로 중심 빔(306i)으로부터 x 축 및 y 축에 대응하는 방위로 배열된다.
투영 아티팩트들은 엇갈린 패턴(staggered pattern)(예를 들어, 각각의 행 또는 열이 인접한 행들 또는 열들로부터 오프셋되어, 행을 따라 또는 열을 따라 모든 투영 아티팩트들이 동일 선상에 있지 않을 수 있는 경우)으로 배열될 수 있으며, 또는 연속 패턴(예를 들어, 각각의 행 또는 열이 인접한 행들 또는 열들과 정렬되어 행을 따라 또는 열을 따라 모든 투영 아티팩트들이 동일 선상에 있는 경우)으로 배열될 수 있다. 투영 아티팩트들의 패턴이 엇갈리거나 또는 연속적인지에 따라, 패턴은 규칙적이며(즉, 투영 아티팩트들의 배치가 랜덤이 아닌 규칙적임), 중심 빔(306i)에 의해 생성된 중심 투영 아티팩트(308)로부터 외측으로 연장될 수 있다. 중심 투영 아티팩트(308)는 "경도 라인"(310)(또는 중앙 열)과 "위도 라인"(312)(또는 중앙 행)의 교차점에 놓여 있으며, 패턴(302)의 "원점"으로 간주될 수 있다.
일례에서, 패턴(302)이 구형 표면(304) 상에 투영되고 있을 때, 경도 라인(310)은 y 축 주위의 제 1 미리 결정된 각도만큼 회전될 수 있다. 대안적으로 또는 추가적으로, 위도 라인(312)은 x 축 주위의 제 2 미리 결정된 각도만큼 회전될 수 있다. 이것은 도 3b에 도시되어 있으며, 여기서 패턴(302)의 형상은 곡선으로 되어 구형 표면(304)의 둥근 형상으로 확인된다.
중심 투영 아티팩트(308), 회전된 경도 라인(310) 및/또는 회전된 위도 라인(312)이 투영되는 구형 표면(304)은 항상 평면이므로, 패턴(302)의 각각의 행 또는 열은 중심 투영 아티팩트(308)를 통과하는 평면을 포함할 것이다. 도 3a 및 도 3b에 도시된 투영 패턴(302)의 단순화된 등각도를 도시한 도 3c에 도시된 바와 같이, 구형 표면(304)의 평면 상에 투영되는 투영 아티팩트들의 각각의 라인은 직선이 될 것이다.
도 3c에 도시된 예에서, 투영 지점(300)과 패턴(302)의 위도 라인에 의해 형성된 표면은 원뿔형이고(원뿔의 정상 또는 좁아지는 단부로서 투영 지점(300)을 가짐), 투영 지점(300)과 패턴(302)의 경로 라인에 의해 형성된 표면은 평평한 또는 평면 표면이다. 이러한 것이 투영 지점들에 의해 형성된 그리드 라인들이 곡선이 되는 이유이다. 경도 라인 상에 배열된 그리드 라인들은 직선들인 반면, 직사각형 형상들(각자의 라인들에 의해 형성된 각도들)은 3 차원 위치의 차이에 대해 균일하다. 일례에서, 예시적인 투영 패턴(302)에 따르면, 거리 센서로부터 물체까지의 거리는 거리 센서의 렌즈의 주점(principal point)을 중심으로 하는 구형 표면(304)의 반경에 대응한다. 센서는 투영 지점(300)을 포함하는 복수의 투영 지점들의 중심에 위치될 수 있고, 상기 주점은 센서 렌즈의 전방 절점(front nodal point)일 수 있다.
도 3d는 반구형 시야에서 도 3a 내지 도 3c의 투영 패턴(302)의 일반적인 형상을 도시한다. 보다 구체적으로, 도 3d는 투영 지점(300)에 대한 투영 패턴의 그리드 라인들의 방향들(orientations)을 도시한다. 도시된 바와 같이, 투영 패턴(302)은 위도 라인(326)과 경도 라인(328) 중 하나 이상을 미리 결정된 각도들(η 및 θ)만큼 각각 회전시킴으로써 조정될 수 있다. η 및 θ는 애플리케이션 및 투영 패턴(302)이 투영될 물체의 형상에 따라 동일하거나 동일하지 않을 수 있다.
실례로, 위도 라인(326)은 y 방향으로(즉, y 축을 따른 방향으로) 새로운 위치(322)로 시프트될 수 있다. 일례에서, 위도 라인(326)의 새로운 위치(322)로의 시프트는 위도 라인(326)을 η의 각도만큼 회전시킴으로써 달성된다.
경도 라인(328)은 x 방향으로(즉, x 축을 따른 방향) 새로운 위치(324)로 시프트될 수 있다. 일례에서, 경도 라인(328)의 새로운 위치(324)로의 시프트는 경도 라인(328)을 θ의 각도만큼 회전시킴으로써 달성된다.
도 3d는 이러한 빔 레이아웃에 의해 생성될 수 있는 예시적인 투영 아티팩트들 중 일부를 도시한다. 위도 라인(326)(η = 0)과 경도 라인(328)(θ = 0)의 원래 위치들의 교차점에 놓여있는 중심 투영 아티팩트(308)에 부가하여, 다음의 투영 아티팩트들이 또한 도시된다: (예를 들어, x 및 y 양쪽 방향들로 시프트된) 중심 투영 아티팩트(308)로부터 (θ, η)의 좌표에 놓여 있고 조정된 패턴에서 중심 투영 아티팩트(308)의 새로운 위치를 나타내는 투영 아티팩트(330); 좌표(θ, 0)에 놓여 있는 투영 아티팩트(332); 및 좌표(0, η)에 놓여 있는 투영 아티팩트(334).
도 4a는 투영 지점(400)으로부터 투영된 빔들의 배열의 일례의 측면도를 도시한 반면, 도 4b는 도 4a의 빔들의 배열에 의해 생성된 투영 패턴(402)의 정면도를 도시한다. 도 4a 및 도 4b의 예에서, 빔들의 배열은 평평한 표면(404) 상에 투영된다.
도시된 바와 같이, 투영 지점(400)은 복수의 빔들(4061 내지 406m)(이하, 개별적으로 "빔(406)" 또는 집합적으로 "빔들(306)"이라고 칭함)을 투영한다. 복수의 빔들(406)은 중심 빔(406i)을 포함한다. 나머지 빔들(406)은 x 축을 따라 양방향으로 및 y 축을 따라 양방향으로 중심 빔(406i)으로부터 팬 아웃된다. 도면들을 단순화하기 위해, 제 1 빔(4061)과 중심 빔(406i) 사이 및 중심 빔(406i)과 마지막 빔(406m) 사이에 존재할 수 있는 빔들(406)은 도 4a에 도시되지 않았다.
복수의 빔들(406)에 의해 생성된 결과 패턴(402)은 도 4b에 도시된 바와 같이, 직사각형 그리드로 배열된 복수의 투영 아티팩트들(예를 들어, 도트들)을 포함한다. 그리드의 행들은 도시된 좌표계의 x 축을 따라 연장되는 반면, 그리드의 열들은 y 축을 따라 연장된다. 행들과 열들은 미리 정의된 규칙에 따른 간격들(예를 들어, 동일한 각도 간격, 동일한 사인 값 간격들 등)로 중심 빔(406i)으로부터 x 축 및 y 축에 대응하는 방위로 배열된다.
투영 아티팩트들은 엇갈린 패턴(예를 들어, 각각의 행 또는 열이 인접한 행들 또는 열들로부터 오프셋되어, 행을 따라 또는 열을 따라 모든 투영 아티팩트들이 동일 선상에 있지 않을 수 있는 경우)으로 배열될 수 있으며, 또는 연속 패턴(예를 들어, 각각의 행 또는 열이 인접한 행들 또는 열들과 정렬되어 행을 따라 또는 열을 따라 모든 투영 아티팩트들이 동일 선상에 있는 경우)으로 배열될 수 있다. 투영 아티팩트들의 패턴이 엇갈리거나 또는 연속적인지에 따라, 패턴은 규칙적이며(즉, 투영 아티팩트들의 배치가 랜덤이 아닌 규칙적임), 중심 빔(406i)에 의해 생성된 중심 투영 아티팩트(408)로부터 외측으로 연장될 수 있다. 중심 투영 아티팩트(408)는 경도 라인(410)과 위도 라인(412)의 교차점에 놓여 있으며, 패턴(402)의 "원점"으로 간주될 수 있다.
도 4c는 도 4a 및 도 4b의 패턴(402)이 평평한 표면(404) 상에 투영될 때 도 4a 및 도 4b의 투영 아티팩트들의 궤적들(414)의 정면도를 도시한다. 도시된 바와 같이, 궤적들(414)은 중첩되지 않는다.
도 4c는 또한 투영 지점(400)에 대한 렌즈(416)의 위치를 도시한다. 기준선(418)에 의해 도시된 바와 같이, 투영 지점(400)은 렌즈(416)로부터 반경 방향 또는 x 방향으로 어느 정도의 거리 a에 위치된다. 그러나, y 방향에서, 투영 지점(416)의 위치와 렌즈 사이에는 차이가 없다. 다시 말해, 렌즈(416)와 투영 지점(400)은 동일한 평면에 장착될 수 있으며, 예를 들어, 투영 지점(400)은 이미지 캡처 디바이스의 광축 방향에서 렌즈의 이미지 캡처 디바이스의 주점(예를 들어, 전방 절점)과 수평이 되도록 한다.
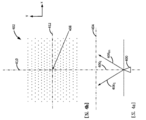
도 5a는 투영 지점(500)으로부터 투영된 빔들의 배열의 일례의 측면도를 도시한 반면, 도 5b는 도 5a의 빔들의 배열에 의해 생성된 투영 패턴(502)의 정면도를 도시한다. 도 5a 및 도 5b의 예에서, 빔들의 배열은 구형 표면(504), 즉 둥근(평평하지 않은) 형상을 갖는 표면 상에 투영된다.
도시된 바와 같이, 투영 지점(500)은 복수의 빔들(5061 내지 506m)(이하, 개별적으로 "빔(506)" 또는 집합적으로 "빔들(506)"이라고 칭함)을 투영한다. 복수의 빔들(506)은 중심 빔(506i)을 포함한다. 나머지 빔들(506)은 x 축을 따라 양방향으로 및 y 축을 따라 양방향으로 중심 빔(506i)으로부터 팬 아웃된다. 도면들을 단순화하기 위해, 제 1 빔(5061)과 중심 빔(506i) 사이 및 중심 빔(506i)과 마지막 빔(506m) 사이에 존재할 수 있는 빔들(506)은 도 5a에 도시되지 않았다.
복수의 빔들(506)에 의해 생성된 결과 패턴(502)은 도 5b에 도시된 바와 같이, 직사각형 그리드로 배열된 복수의 투영 아티팩트들(예를 들어, 도트들)을 포함한다. 그리드의 행들은 도시된 좌표계의 x 축을 따라 연장되는 반면, 그리드의 열들은 y 축을 따라 연장된다. 행들과 열들은 미리 정의된 규칙에 따른 간격들(예를 들어, 동일한 각도 간격, 동일한 사인 값 간격들 등)로 중심 빔(506i)으로부터 x 축 및 y 축에 대응하는 방위로 배열된다.
투영 아티팩트들은 엇갈린 패턴(예를 들어, 각각의 행 또는 열이 인접한 행들 또는 열들로부터 오프셋되어, 행을 따라 또는 열을 따라 모든 투영 아티팩트들이 동일 선상에 있지 않을 수 있는 경우)으로 배열될 수 있으며, 또는 연속 패턴(예를 들어, 각각의 행 또는 열이 인접한 행들 또는 열들과 정렬되어 행을 따라 또는 열을 따라 모든 투영 아티팩트들이 동일 선상에 있는 경우)으로 배열될 수 있다. 투영 아티팩트들의 패턴이 엇갈리거나 또는 연속적인지에 따라, 패턴은 규칙적이며(즉, 투영 아티팩트들의 배치가 랜덤이 아닌 규칙적임), 중심 빔(506i)에 의해 생성된 중심 투영 아티팩트(508)로부터 외측으로 연장될 수 있다. 중심 투영 아티팩트(508)는 경도 라인(510)과 위도 라인(512)의 교차점에 놓여 있으며, 패턴(502)의 "원점"으로 간주될 수 있다.
도 5c는 평평한 표면(516) 상에 투영된 도 5a 및 도 5b의 투영 패턴(502)의 측면도를 도시하고, 도 5d는 평평한 표면(516) 상에 투영된 도 5a 및 도 5b의 투영 패턴(502)의 정면도를 도시한다. 도 5c에 도시된 바와 같이, 패턴(502)이 평탄면(516) 상에 투영될 때와 달리, 패턴(502)은 구부러진다. 아래에서 도 5e와 관련하여 논의되는 바와 같이, 이러한 것은 투영 아티팩트들의 궤적들이 중첩되게 할 수 있다. 이러한 것은 도 5a 및 도 5b의 예와 대조적인 것이며, 여기서 패턴(502)은 구형 표면(504) 상에 투영되고 그것의 대체로 직사각형 그리드 형상을 유지한다.
도 5e는 도 5a 내지 도 5d의 패턴(502)이 평평한 표면(520) 상에 투영될 때 도 5a 내지 도 5d의 투영 아티팩트들의 궤적들(514)의 정면도를 도시한다. 도시된 바와 같이, 궤적들(514)은 평평한 표면(520) 상에 투영될 때 중첩된다.
도 5e는 또한 투영 지점(500)에 대한 렌즈(516)의 위치를 도시한다. 기준선(518)에 의해 도시된 바와 같이, 투영 지점(500)은 렌즈(516)로부터 반경 방향 또는 x 방향으로 어느 정도의 거리 a에 위치된다. 그러나, y 방향에서, 투영 지점(500)의 위치와 렌즈(516) 사이에는 차이가 없다. 다시 말해, 렌즈(516)와 투영 지점(500)은 동일한 평면에 장착될 수 있으며, 예를 들어, 투영 지점(500)은 이미지 캡처 디바이스의 광축 방향에서 렌즈의 이미지 캡처 디바이스의 주점(예를 들어, 전방 절점)과 수평이 되도록 한다.
도 5f는 반구형 시야에서 도 5a 내지 도 5e의 투영 패턴(502)의 일반적인 형상을 도시한다. 보다 구체적으로, 도 5e는 투영 지점(500)에 대한 투영 패턴의 그리드 라인들의 방향들을 도시한다. 도시된 바와 같이, 투영 패턴(502)은 위도 라인(526)과 경도 라인(528) 중 하나 이상을 미리 결정된 각도들(η 및 θ)만큼 각각 회전시킴으로써 조정될 수 있다. η 및 θ는 애플리케이션 및 투영 패턴(502)이 투영될 물체의 형상에 따라 동일하거나 동일하지 않을 수 있다.
실례로, 위도 라인(526)은 y 방향으로(즉, y 축을 따른 방향으로) 새로운 위치(522)로 시프트될 수 있다. 일례에서, 위도 라인(526)의 새로운 위치(522)로의 시프트는 위도 라인(526)을 η의 각도만큼 회전시킴으로써 달성된다.
경도 라인(528)은 x 방향으로(즉, x 축을 따른 방향) 새로운 위치(524)로 시프트될 수 있다. 일례에서, 경도 라인(528)의 새로운 위치(524)로의 시프트는 경도 라인(528)을 θ의 각도만큼 회전시킴으로써 달성된다.
도 5f는 이러한 빔 레이아웃에 의해 생성될 수 있는 예시적인 투영 아티팩트들 중 일부를 도시한다. 위도 라인(526)(θ = 0)과 경도 라인(528)(η = 0)의 원래 위치들의 교차점에 놓여있는 중심 투영 아티팩트(508)에 부가하여, 다음의 투영 아티팩트들이 또한 도시된다: (예를 들어, x 및 y 양쪽 방향들로 시프트된) 중심 투영 아티팩트(508)로부터 (θ, η)의 좌표에 놓여 있고 조정된 패턴에서 중심 투영 아티팩트(508)의 새로운 위치를 나타내는 투영 아티팩트(530); 좌표(0, η)에 놓여 있는 투영 아티팩트(532); 및 좌표(θ, 0)에 놓여 있는 투영 아티팩트(534).
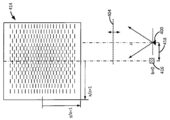
도 6a는 투영 지점(600)으로부터 투영된 빔들의 배열의 일례의 측면도를 도시한 반면, 도 6b는 도 6a의 빔들의 배열에 의해 생성된 투영 패턴(602)의 정면도를 도시한다. 도 6a 및 도 6b의 예에서, 빔들의 배열은 구형 표면(604), 즉 둥근(평평하지 않은) 형상을 갖는 표면 상에 투영된다.
도시된 바와 같이, 투영 지점(600)은 복수의 빔들(6061 내지 606m)(이하, 개별적으로 "빔(606)" 또는 집합적으로 "빔들(606)"이라고 칭함)을 투영한다. 복수의 빔들(606)은 중심 빔(606i)을 포함한다. 나머지 빔들(606)은 x 축을 따라 양방향으로 및 y 축을 따라 양방향으로 중심 빔(606i)으로부터 팬 아웃된다. 도면들을 단순화하기 위해, 제 1 빔(6061)과 중심 빔(606i) 사이 및 중심 빔(606i)과 마지막 빔(606m) 사이에 존재할 수 있는 빔들(606)은 도 6a에 도시되지 않았다.
복수의 빔들(606)에 의해 생성된 결과 패턴(602)은 도 6b에 도시된 바와 같이, 직사각형 그리드로 배열된 복수의 투영 아티팩트들(예를 들어, 도트들)을 포함한다. 그리드의 행들은 도시된 좌표계의 x 축을 따라 연장되는 반면, 그리드의 열들은 y 축을 따라 연장된다. 행들과 열들은 미리 정의된 규칙에 따른 간격들(예를 들어, 동일한 각도 간격, 동일한 사인 값 간격들 등)로 중심 빔(606i)으로부터 x 축 및 y 축에 대응하는 방위로 배열된다.
투영 아티팩트들은 엇갈린 패턴(예를 들어, 각각의 행 또는 열이 인접한 행들 또는 열들로부터 오프셋되어, 행을 따라 또는 열을 따라 모든 투영 아티팩트들이 동일 선상에 있지 않을 수 있는 경우)으로 배열될 수 있으며, 또는 연속 패턴(예를 들어, 각각의 행 또는 열이 인접한 행들 또는 열들과 정렬되어 행을 따라 또는 열을 따라 모든 투영 아티팩트들이 동일 선상에 있는 경우)으로 배열될 수 있다.
투영 아티팩트들의 패턴이 엇갈리거나 또는 연속적인지에 따라, 패턴은 규칙적이며(즉, 투영 아티팩트들의 배치가 랜덤이 아닌 규칙적임), 중심 빔(606i)에 의해 생성된 중심 투영 아티팩트(608)로부터 외측으로 연장될 수 있다. 중심 투영 아티팩트(608)는 경도 라인(610)과 위도 라인(612)의 교차점에 놓여 있으며, 패턴(602)의 "원점"으로 간주될 수 있다.
일례에서, 패턴(602)이 중심 투영 아티팩트(608)를 중심으로 하는 구형 표면(604) 상에 투영되고 있을 때, 패턴(602)은 6b에 도시된 바와 같이, 지구의 적도 바로 위로부터 지구의 경도(예를 들어, 자오선) 및 위도(예를 들어, 적도) 라인들을 직접 보는 것과 닮은 형상을 취할 수 있다.
도 6c는 평평한 표면 상에 투영된 도 6a 및 도 6b의 투영 패턴(602)의 측면도를 도시하고, 도 6d는 평평한 표면 상에 투영된 도 6a 및 도 6b의 투영 패턴(602)의 정면도를 도시한다.
도 6e는 도 6a 내지 도 6d의 패턴(602)이 평평한 표면(614) 상에 투영될 때 도 6a 내지 도 6d의 투영 아티팩트들의 궤적들(620)의 정면도를 도시한다. 도시된 바와 같이, 궤적들(620)은 중첩되지 않는다.
도 6e는 또한 투영 지점(600)에 대한 렌즈(616)의 위치를 도시한다. 기준선(618)에 의해 도시된 바와 같이, 투영 지점(600)은 렌즈(616)로부터 반경 방향 또는 x 방향으로 어느 정도의 거리 a에 위치된다. 그러나, y 방향에서, 투영 지점(600)의 위치와 렌즈(616) 사이에는 차이가 없다. 다시 말해, 렌즈(616)와 투영 지점(600)은 동일한 평면에 장착될 수 있으며, 예를 들어, 투영 지점(600)은 이미지 캡처 디바이스의 광축 방향에서 렌즈의 이미지 캡처 디바이스의 주점(예를 들어, 전방 절점)과 수평이 되도록 한다.
도 7은 본 개시의 예시적인 투영 빔 정렬을 도시한다. 특히, 도 7은 렌즈/이미지 캡처 디바이스의 전방 절점(front nodal point)(700), 제 1 투영 지점(7021) 및 제 2 투영 지점(7022)을 포함하는 거리 센서의 다양한 구성요소들을 도시한다.
도시된 바와 같이, 전방 절점(700)은 제 1 투영 지점(7021) 및 제 2 투영 지점(7022) 각각으로부터 (예를 들어, x 축을 따라) 측 방향 거리 a에 위치된다. 제 1 투영 지점(7021) 및 제 2 투영 지점(7022)은 (예를 들어, z 축을 따라) 전방 절점(700) 후방의 거리 b에 위치된다. 또한, 제 1 투영 지점(7021)과 제 2 투영 지점(7022) 사이(및 거리 센서의 일부가 될 수 있는 임의의 다른 투영 지점들 사이)에서 ω의 각도가 정의된다.
제 1 투영 포인트(7021)를 예로 들면, 제 1 투영 포인트(7021)는 중심 빔(704)을 포함하는 복수의 광 빔들을 투영한다. 간략화를 위해, 단지 중심 빔(704)만이 도 7에 도시되어 있다. 중심 빔(704)은 복수의 빔들에 의해 생성된 투영 패턴의 중심 투영 아티팩트(706)를 생성한다. 간략화를 위해, 단지 중심 투영 아티팩트(706)만이 도 7에 도시되어 있다.
제 1 투영 지점(7021)에 대한 중심 빔(704)의 방향(orientation)은 복수의 각도들로 설명될 수 있다. 실례로, 중심 빔(704)에 의해 정의된 평면(708)과 전방 절점(700)의 중심 축(712) 및 제 1 투영 지점(7021)을 통과하는 반경 라인(710) 사이에서 α의 각도가 정의될 수 있다.
롤링 축(rolling axis)(ε)은 중심 투영 아티팩트(706)의 위치를 조정하기 위해 중심 빔(706)이 어떻게 회전될 수 있는지를 도시한다. 중심 빔은 y 축을 따라 θ의 각도만큼 및/또는 x 축을 따라 η의 각도만큼 회전될 수 있다. 또한, 중심 빔(706)과 전방 절점(700)의 중심 축(712)에 평행한 각도로 제 1 투영 지점(7021)을 통과하는 라인 사이에서 δ의 각도가 정의된다.
도 8은 센서로부터 물체까지의 거리를 계산하기 위한 예시적인 방법(800)의 흐름도를 도시한다. 일 실시예에서, 방법(800)은 도 9에 도시되고 후술되는 바와 같이 범용 컴퓨팅 디바이스 또는 이미징 센서(예를 들어, 거리 센서의 임의의 이미징 센서)에 통합된 프로세서에 의해 수행될 수 있다.
방법(800)은 단계(802)에서 시작한다. 단계(804)에서, 투영 패턴은 거리 센서의 투영 지점으로부터 물체 상으로 투영될 수 있다. 전술한 바와 같이, 투영 패턴은 투영 포인트로부터 복수의 빔들을 투영함으로써 생성될 수 있으며, 그에 따라 복수의 빔들이 물체에 입사될 때 투영 아티팩트들(예를 들어, 도트들, 대시들, x들 등)의 패턴이 적어도 이미징 센서에 의해 보여질 수 있게 된다. 패턴은 투영 아티팩트들이 배열되는(예를 들어, 복수의 행들 및 복수의 열들로서) 직사각형 그리드를 포함할 수 있다.
역시 전술한 바와 같이, 투영 패턴의 중심 투영 아티팩트는 투영 패턴의 경도 라인(예를 들어, 중심 열)과 위도 라인(예를 들어, 중심 열)의 교차점에서 생성된다.
단계(806)에서, 경도 라인과 위도 라인 중 적어도 하나가 투영되는 각도는 미리 정의된 양만큼 회전될 수 있어 투영 패턴의 형상을 조정할 수 있고, 조정된 투영 패턴이 물체 상에 투영될 수 있게 된다. 일례에서, 투영 패턴의 형상은 투영 패턴이 투영되는 물체의 형상을 보상하도록 조정된다. 실례로, 물체가 구형 또는 둥근 표면을 갖는 경우, 적절히 조정되지 않으면 투영 패턴이 왜곡되어 나타날 수 있다. 이러한 왜곡으로 인해 일부 투영 아티팩트들의 궤도들이 겹칠게 될 수 있다. 일례에서, 경도 라인은 그의 원래 위치로부터 제 1 미리 결정된 각도만큼 회전될 수 있는 반면, 위도 라인은 그 원래 위치로부터 제 2 미리 결정된 각도만큼 회전된다. 제 1 미리 결정된 각도 및 제 2 미리 결정된 각도는 동일하거나 동일하지 않을 수 있다.
단계(808)에서, 물체의 적어도 하나의 이미지가 캡처될 수 있다. 조정된 투영 패턴의 적어도 일부는 물체의 표면에서 보일 수 있다.
단계(810)에서, 거리 센서로부터 물체까지의 거리는 단계(808)에서 캡처된 이미지(들)로부터의 정보를 사용하여 계산될 수 있다. 일 실시예에서, 삼각 측량 기술이 거리를 계산하기 위해 사용된다. 예를 들어, 투영 패턴을 구성하는 복수의 투영 아티팩트들 사이의 위치 관계들이 계산을 위한 기초로서 사용될 수 있다.
방법(800)은 단계(812)에서 종료한다. 방법(800)은 거리 센서의 추가적인 투영 지점들에 대해 (동시에 또는 순차적으로) 반복될 수 있다.
명시적으로 열거되지는 않았지만, 전술한 방법(800)의 블록들, 기능들, 또는 동작들 중 일부는 특정 애플리케이션에 대한 저장, 디스플레이 및/또는 출력을 포함할 수 있음에 유의해야 한다. 다시 말해서, 방법(800)에서 논의된 임의의 데이터, 기록들, 필드들, 및/또는 중간 결과들은 특정 애플리케이션에 따라 다른 디바이스에 저장, 디스플레이 및/또는 출력될 수 있다. 또한, 결정 동작을 인용하거나 결정을 수반하는 도 8에서의 블록들, 기능들, 또는 동작들은 결정 동작의 양쪽 분기들이 모두 수행되는 것을 의미하지는 않는다. 다시 말해서, 결정 동작의 결과에 따라, 결정 동작의 분기들 중 하나가 수행되지 않을 수 있다.
도 9는 센서로부터 물체까지의 거리를 계산하기 위한 예시적인 전자 디바이스(900)의 하이 레벨 블록도를 도시한다. 그로서, 전자 디바이스(900)는 거리 센서와 같은 전자 디바이스 또는 시스템의 프로세서로서 구현될 수 있다.
도 9에 도시된 바와 같이, 전자 디바이스(900)는 예를 들어 중앙 처리 장치(CPU), 마이크로프로세서, 또는 멀티-코어 프로세서와 같은 하드웨어 프로세서 요소(902), 예를 들어 랜덤 액세스 메모리(RAM) 및/또는 판독 전용 메모리(ROM)와 같은 메모리(904), 센서로부터 물체까지의 거리를 계산하기 위한 모듈(905), 및 예를 들어 제한되지는 않지만 테이프 드라이브, 플로피 드라이브, 하드 디스크 드라이브 또는 컴팩트 디스크 드라이브를 포함하는 저장 디바이스, 수신기, 송신기, 디스플레이, 출력 포트, 입력 포트, 및 사용자 입력 디바이스로서 예컨대 키보드, 키패드, 마우스, 마이크 등과 같은 사용자 입력 디바이스와 같은 다양한 입력/출력 디바이스들(906)을 포함한다.
하나의 프로세서 요소가 도시되어 있지만, 전자 디바이스(900)는 복수의 프로세서 요소들을 채용할 수 있음에 유의해야 한다. 또한, 하나의 전자 디바이스(900)가 도면에 도시되어 있지만, 전술한 바와 같은 방법(들)이 특정한 예시적인 예에 대해 분산 또는 병렬 방식으로 구현되는 경우, 즉 상기 방법(들)의 블록들 또는 전체 방법(들)이 다중 또는 병렬 전자 디바이스들에 걸쳐 구현되는 경우, 이 도면의 전자 디바이스(900)는 이들 다중의 전자 디바이스들 각각을 나타내도록 의도된다.
본 개시는 예를 들어, ASIC(application specific integrated circuit), FPGA(field-programmable gate array)를 포함하는 PLA(programmable logic array), 또는 하드웨어 디바이스, 범용 컴퓨터 또는 임의의 다른 하드웨어 등가물들 상에 배치된 상태 머신을 사용하여 기계 판독 가능한 명령들에 의해 및/또는 기계 판독 가능한 명령들과 하드웨어의 조합으로 구현될 수 있다는 점에 유의해야 하며, 예를 들어 위에서 논의된 방법(들)에 관한 컴퓨터 판독 가능한 명령들은 상기 개시된 방법(들)의 블록들, 기능들 및/또는 동작들을 수행하도록 하드웨어 프로세서를 구성하는 데 사용될 수 있다.
일례에서, 센서로부터 물체까지의 거리를 계산하기 위한 본 모듈 또는 프로세스(905)에 대한 명령들 및 데이터, 예를 들어, 기계 판독 가능한 명령들은 메모리(904)에 로딩되고 하드웨어 프로세서 요소(902)에 의해 실행되어, 방법(800)과 관련하여 위에서 논의된 바와 같은 블록들, 기능들 또는 동작들을 구현할 수 있다. 또한, 하드웨어 프로세서가 "동작들"을 수행하기 위해 명령들을 실행할 때, 이러한 것은 동작들을 직접적으로 수행하거나 및/또는 예를 들어 동작들을 수행하기 위한 보조-프로세서 등과 같은 다른 하드웨어 디바이스 또는 구성요소를 용이하게 하거나, 지시하거나 또는 함께 협력하는 하드웨어 프로세서를 포함할 수 있다.
전술한 방법(들)과 관련한 기계 판독 가능한 명령들을 실행하는 프로세서는 프로그램된 프로세서 또는 특수화된 프로세서로서 인식될 수 있다. 그로서, 본 개시의 센서로부터 물체까지의 거리를 계산하기 위한 본 모듈(905)은 유형의 또는 물리적인(광범위하게는 비-일시적) 컴퓨터 판독 가능한 저장 디바이스 또는 매체(예를 들어, 휘발성 메모리, 비-휘발성 메모리, ROM 메모리, RAM 메모리, 자기 또는 광학 드라이브, 디바이스 또는 디스켓 등)에 저장될 수 있다. 보다 구체적으로는, 컴퓨터 판독 가능한 저장 디바이스는 안전 센서 시스템의 제어기 또는 컴퓨터와 같은 전자 디바이스 또는 프로세서에 의해 액세스될 데이터 및/또는 명령들과 같은 정보를 저장하는 능력을 제공하는 임의의 물리적 디바이스들을 포함할 수 있다.
상기 기술된 및 다른 특징들 및 기능들의 변형들, 또는 그 대안들이 많은 다른 상이한 시스템들 또는 애플리케이션들에 결합될 수 있음을 이해할 것이다. 다음의 청구 범위에 의해 포함되도록 또한 의도된 다양한 현재 예상되지 않거나 예상치 못한 대안들, 수정들 또는 변형들이 본 명세서에서 후속적으로 이루어질 수 있다.
Claims (20)
- 거리 센서의 투영 지점으로부터 물체의 표면 상에 투영 패턴을 투영하는 단계로서, 상기 투영 패턴은 상기 투영 지점으로부터 투영된 복수의 광 빔들에 의해 생성되고, 상기 복수의 광 빔들은 상기 물체의 표면 상에 그리드(grid)로 배열된 복수의 투영 아티팩트들(projection artifacts)을 생성하고, 상기 복수의 투영 아티팩트들의 중심 투영 아티팩트는 상기 그리드의 경도 라인(longitude line)과 상기 그리드의 위도 라인(latitude line)의 교차점에 놓이는, 상기 투영 패턴을 투영하는 단계;
상기 경도 라인과 상기 위도 라인 중 적어도 하나가 원래 위치로부터 새로운 위치로 미리 결정된 양만큼 회전되어 조정된 투영 패턴이 상기 물체의 표면 상에 투영되도록 상기 복수의 빔들의 투영을 조정하는 단계;
상기 조정된 투영 패턴의 적어도 일부를 포함하는 상기 물체의 이미지를 캡처하는 단계; 및
상기 이미지로부터의 정보를 사용하여 상기 거리 센서로부터 상기 물체까지의 거리를 계산하는 단계를 포함하는, 방법. - 제 1 항에 있어서, 상기 그리드는 복수의 행들 및 복수의 열들을 포함하는, 방법.
- 제 2 항에 있어서, 상기 복수의 열들은 엇갈린 패턴(staggered pattern)으로 배열되어, 공통의 행에 존재하는 상기 복수의 아티팩트들의 투영 아티팩트들이 동일 선상에 있지 않게 되는, 방법.
- 제 1 항에 있어서, 상기 거리는 상기 거리 센서의 렌즈의 주점(principal point)을 중심으로 하는 구형 표면의 반경에 대응하는, 방법.
- 제 1 항에 있어서, 상기 투영 패턴의 평면은 상기 거리 센서의 기준선(baseline)과 평행하고, 상기 기준선은 상기 투영 지점의 중심 축과 상기 거리 센서의 렌즈의 중심 축 사이의 측 방향 거리로서 정의되는, 방법.
- 제 5 항에 있어서, 상기 복수의 투영 아티팩트들의 각각의 투영 아티팩트는 궤적을 가지며, 상기 복수의 투영 아티팩트들의 주어진 투영 아티팩트의 궤적은 상기 기준선으로부터 상기 물체까지의 거리가 변함에 따라 상기 물체의 표면 상에서의 상기 주어진 투영 아티팩트의 움직임을 형성하는, 방법.
- 제 6 항에 있어서, 주어진 투영 지점의 궤적과 상기 복수의 투영 지점들 중 다른 투영 지점의 궤적의 중첩은 상기 조정에 의해 최소화되는, 방법.
- 제 1 항에 있어서, 상기 조정하는 단계는:
상기 경도 라인을 제 1 각도만큼 회전시키는 단계; 및
상기 위도 라인을 제 2 각도만큼 회전시키는 단계를 포함하는, 방법. - 제 8 항에 있어서, 상기 제 1 각도와 상기 제 2 각도는 동일한, 방법.
- 제 8 항에 있어서, 상기 제 1 각도와 상기 제 2 각도는 동일하지 않은, 방법.
- 제 1 항에 있어서, 상기 투영 지점과 상기 거리 센서의 렌즈는 공통의 평면에 장착되어, 상기 투영 지점이 이미지 캡처 디바이스의 광축 방향으로 상기 렌즈가 연결되는 상기 이미지 캡처 디바이스의 주점(principal point)과 수평이 되도록 하는, 방법.
- 제 11 항에 있어서, 상기 주점은 상기 렌즈의 전방 절점(front nodal point)인, 방법.
- 제 1 항에 있어서, 상기 이미지를 캡처하는 데 사용되는 이미지 디바이스의 시야는 반구형인, 방법.
- 프로세서에 의해 실행 가능한 명령들로 인코딩된 비-일시적 기계 판독 가능한 저장 매체로서, 상기 상기 명령들은 실행될 때 상기 프로세서로 하여금:
거리 센서의 투영 지점으로부터 물체의 표면 상에 투영 패턴을 투영하는 동작으로서, 상기 투영 패턴은 상기 투영 지점으로부터 투영된 복수의 광 빔들에 의해 생성되고, 상기 복수의 광 빔들은 상기 물체의 표면 상에 그리드로 배열된 복수의 투영 아티팩트들을 생성하고, 상기 복수의 투영 아티팩트들의 중심 투영 아티팩트는 상기 그리드의 경도 라인과 상기 그리드의 위도 라인의 교차점에 놓이는, 상기 투영 패턴을 투영하는 동작;
상기 경도 라인과 상기 위도 라인 중 적어도 하나가 원래 위치로부터 새로운 위치로 미리 결정된 양만큼 회전되어 조정된 투영 패턴이 상기 물체의 표면 상에 투영되도록 상기 복수의 빔들의 투영을 조정하는 동작;
상기 조정된 투영 패턴의 적어도 일부를 포함하는 상기 물체의 이미지를 캡처하는 동작; 및
상기 이미지로부터의 정보를 사용하여 상기 거리 센서로부터 상기 물체까지의 거리를 계산하는 동작
을 포함하는 동작들을 수행하게 하는, 비-일시적 기계 판독 가능한 저장 매체. - 제 14 항에 있어서, 상기 투영 패턴의 평면은 상기 거리 센서의 기준선과 평행하고, 상기 기준선은 상기 투영 지점의 중심 축과 상기 거리 센서의 렌즈의 중심 축 사이의 측 방향 거리로서 정의되는, 비-일시적 기계 판독 가능한 저장 매체.
- 제 15 항에 있어서, 상기 복수의 투영 아티팩트들의 각각의 투영 아티팩트는 궤적을 가지며, 상기 복수의 투영 아티팩트들의 주어진 투영 아티팩트의 궤적은 상기 기준선으로부터 상기 물체까지의 거리가 변함에 따라 상기 물체의 표면 상에서의 상기 주어진 투영 아티팩트의 움직임을 형성하는, 비-일시적 기계 판독 가능한 저장 매체.
- 제 16 항에 있어서, 주어진 투영 지점의 궤적과 상기 복수의 투영 지점들 중 다른 투영 지점의 궤적의 중첩은 상기 조정에 의해 최소화되는, 비-일시적 기계 판독 가능한 저장 매체.
- 제 14 항에 있어서, 상기 조정하는 동작은:
상기 경도 라인을 제 1 각도만큼 회전시키는 동작; 및
상기 위도 라인을 제 2 각도만큼 회전시키는 동작을 포함하는, 비-일시적 기계 판독 가능한 저장 매체. - 제 14 항에 있어서, 상기 투영 지점과 상기 거리 센서의 렌즈는 공통의 평면에 장착되어, 상기 투영 지점이 이미지 캡처 디바이스의 광축 방향으로 상기 렌즈가 연결되는 상기 이미지 캡처 디바이스의 주점과 수평이 되도록 하는, 비-일시적 기계 판독 가능한 저장 매체.
- 제 19 항에 있어서, 상기 주점은 상기 렌즈의 전방 절점인, 비-일시적 기계 판독 가능한 저장 매체.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762569543P | 2017-10-08 | 2017-10-08 | |
| US62/569,543 | 2017-10-08 | ||
| PCT/US2018/054183 WO2019070867A2 (en) | 2017-10-08 | 2018-10-03 | DISTANCE MEASUREMENT USING A LONGITUDINAL GRID PATTERN |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200054326A true KR20200054326A (ko) | 2020-05-19 |
Family
ID=65993124
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207013018A KR20200054326A (ko) | 2017-10-08 | 2018-10-03 | 경도 그리드 패턴을 사용한 거리 측정 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11199397B2 (ko) |
| EP (1) | EP3692396A4 (ko) |
| JP (1) | JP7565212B2 (ko) |
| KR (1) | KR20200054326A (ko) |
| CN (1) | CN111492262B (ko) |
| TW (1) | TWI813587B (ko) |
| WO (1) | WO2019070867A2 (ko) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102595391B1 (ko) | 2016-12-07 | 2023-10-31 | 매직 아이 인코포레이티드 | 조정 가능한 초점 이미징 센서를 포함한 거리 센서 |
| US10885761B2 (en) | 2017-10-08 | 2021-01-05 | Magik Eye Inc. | Calibrating a sensor system including multiple movable sensors |
| WO2019182881A1 (en) | 2018-03-20 | 2019-09-26 | Magik Eye Inc. | Distance measurement using projection patterns of varying densities |
| JP7354133B2 (ja) | 2018-03-20 | 2023-10-02 | マジック アイ インコーポレイテッド | 三次元深度検知及び二次元撮像のためのカメラ露出調節 |
| CN112513565B (zh) * | 2018-06-06 | 2023-02-10 | 魔眼公司 | 使用高密度投影图案的距离测量 |
| US11475584B2 (en) | 2018-08-07 | 2022-10-18 | Magik Eye Inc. | Baffles for three-dimensional sensors having spherical fields of view |
| WO2020150131A1 (en) | 2019-01-20 | 2020-07-23 | Magik Eye Inc. | Three-dimensional sensor including bandpass filter having multiple passbands |
| WO2020197813A1 (en) | 2019-03-25 | 2020-10-01 | Magik Eye Inc. | Distance measurement using high density projection patterns |
| WO2020231747A1 (en) | 2019-05-12 | 2020-11-19 | Magik Eye Inc. | Mapping three-dimensional depth map data onto two-dimensional images |
| WO2021113135A1 (en) | 2019-12-01 | 2021-06-10 | Magik Eye Inc. | Enhancing triangulation-based three-dimensional distance measurements with time of flight information |
| EP4094181A4 (en) | 2019-12-29 | 2024-04-03 | Magik Eye Inc. | ASSIGNMENT OF THREE-DIMENSIONAL COORDINATES TO TWO-DIMENSIONAL FEATURE POINTS |
| JP2023510738A (ja) | 2020-01-05 | 2023-03-15 | マジック アイ インコーポレイテッド | 3次元カメラの座標系を2次元カメラの入射位置に移動させる方法 |
| DE102020102466A1 (de) * | 2020-01-31 | 2021-08-05 | Daimler Ag | Verfahren zur Kalibrierung einer Kamera und/oder eines Lidarsensors eines Fahrzeugs oder eines Roboters |
Family Cites Families (164)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4914460A (en) | 1987-05-29 | 1990-04-03 | Harbor Branch Oceanographic Institution Inc. | Apparatus and methods of determining distance and orientation |
| US4954962A (en) | 1988-09-06 | 1990-09-04 | Transitions Research Corporation | Visual navigation and obstacle avoidance structured light system |
| JPH045112A (ja) | 1990-04-23 | 1992-01-09 | Sumitomo Rubber Ind Ltd | 低転がり抵抗タイヤ |
| JPH08555A (ja) | 1994-06-16 | 1996-01-09 | Fuji Photo Optical Co Ltd | 内視鏡の照明装置 |
| DE4426424C2 (de) * | 1994-07-26 | 2002-05-23 | Asclepion Meditec Ag | Vorrichtung zur rasterstereografischen Vermessung von Körperoberflächen |
| US5699444A (en) | 1995-03-31 | 1997-12-16 | Synthonics Incorporated | Methods and apparatus for using image data to determine camera location and orientation |
| JP3328111B2 (ja) | 1995-08-23 | 2002-09-24 | 日本電気株式会社 | 空間距離測定方法及び空間距離測定装置 |
| US6038415A (en) | 1997-07-18 | 2000-03-14 | Minolta Co., Ltd. | Image forming apparatus and image-carrier cartridge device which is employed in the same |
| DE69823116D1 (de) | 1997-08-05 | 2004-05-19 | Canon Kk | Bildverarbeitungsverfahren und -gerät |
| US5980454A (en) | 1997-12-01 | 1999-11-09 | Endonetics, Inc. | Endoscopic imaging system employing diffractive optical elements |
| US5870136A (en) | 1997-12-05 | 1999-02-09 | The University Of North Carolina At Chapel Hill | Dynamic generation of imperceptible structured light for tracking and acquisition of three dimensional scene geometry and surface characteristics in interactive three dimensional computer graphics applications |
| AUPP299498A0 (en) | 1998-04-15 | 1998-05-07 | Commonwealth Scientific And Industrial Research Organisation | Method of tracking and sensing position of objects |
| US7193645B1 (en) | 2000-07-27 | 2007-03-20 | Pvi Virtual Media Services, Llc | Video system and method of operating a video system |
| US6937350B2 (en) | 2001-06-29 | 2005-08-30 | Massachusetts Institute Of Technology | Apparatus and methods for optically monitoring thickness |
| US7940299B2 (en) | 2001-08-09 | 2011-05-10 | Technest Holdings, Inc. | Method and apparatus for an omni-directional video surveillance system |
| GB2395261A (en) | 2002-11-11 | 2004-05-19 | Qinetiq Ltd | Ranging apparatus |
| TWI247104B (en) | 2003-02-26 | 2006-01-11 | Hon Hai Prec Ind Co Ltd | A measuring method for pattern of light guide plate |
| DE10308383A1 (de) | 2003-02-27 | 2004-09-16 | Storz Endoskop Produktions Gmbh | Verfahren und optisches System zur Vermessung der Topographie eines Meßobjekts |
| KR100764419B1 (ko) | 2004-02-09 | 2007-10-05 | 강철권 | 불규칙패턴을 이용한 3차원형상 측정장치 및 측정방법 |
| US20050288956A1 (en) | 2004-06-16 | 2005-12-29 | Ewald Speicher | Systems and methods for integrating business process documentation with work environments |
| US7191056B2 (en) | 2005-01-04 | 2007-03-13 | The Boeing Company | Precision landmark-aided navigation |
| JP2006313116A (ja) | 2005-05-09 | 2006-11-16 | Nec Viewtechnology Ltd | 距離傾斜角度検出装置および該検出装置を備えたプロジェクタ |
| JP4644540B2 (ja) | 2005-06-28 | 2011-03-02 | 富士通株式会社 | 撮像装置 |
| US20070091174A1 (en) | 2005-09-30 | 2007-04-26 | Topcon Corporation | Projection device for three-dimensional measurement, and three-dimensional measurement system |
| JP4760391B2 (ja) | 2006-01-13 | 2011-08-31 | カシオ計算機株式会社 | 測距装置及び測距方法 |
| JP4799216B2 (ja) | 2006-03-03 | 2011-10-26 | 富士通株式会社 | 距離測定機能を有する撮像装置 |
| US7375803B1 (en) | 2006-05-18 | 2008-05-20 | Canesta, Inc. | RGBZ (red, green, blue, z-depth) filter system usable with sensor systems, including sensor systems with synthetic mirror enhanced three-dimensional imaging |
| JP4889373B2 (ja) | 2006-05-24 | 2012-03-07 | ローランドディー.ジー.株式会社 | 3次元形状測定方法およびその装置 |
| US8471892B2 (en) | 2006-11-23 | 2013-06-25 | Z. Jason Geng | Wide field-of-view reflector and method of designing and making same |
| WO2008133958A1 (en) * | 2007-04-23 | 2008-11-06 | California Institute Of Technology | Single-lens, single-aperture, single-sensor 3-d imaging device |
| TWI320480B (en) | 2007-04-23 | 2010-02-11 | Univ Nat Formosa | One diffraction 6 degree of freedom optoelectronic measurement system |
| DE102007054906B4 (de) | 2007-11-15 | 2011-07-28 | Sirona Dental Systems GmbH, 64625 | Verfahren zur optischen Vermessung der dreidimensionalen Geometrie von Objekten |
| US9170097B2 (en) * | 2008-04-01 | 2015-10-27 | Perceptron, Inc. | Hybrid system |
| WO2009124601A1 (en) | 2008-04-11 | 2009-10-15 | Ecole Polytechnique Federale De Lausanne Epfl | Time-of-flight based imaging system using a display as illumination source |
| US8282485B1 (en) | 2008-06-04 | 2012-10-09 | Zhang Evan Y W | Constant and shadowless light source |
| DE102008031942A1 (de) | 2008-07-07 | 2010-01-14 | Steinbichler Optotechnik Gmbh | Verfahren und Vorrichtung zur 3D-Digitalisierung eines Objekts |
| DE112009001652T5 (de) | 2008-07-08 | 2012-01-12 | Chiaro Technologies, Inc. | Mehrkanal-Erfassung |
| US8334900B2 (en) | 2008-07-21 | 2012-12-18 | The Hong Kong University Of Science And Technology | Apparatus and method of optical imaging for medical diagnosis |
| JP2010091855A (ja) | 2008-10-09 | 2010-04-22 | Denso Corp | レーザビーム照射装置 |
| JP5251419B2 (ja) | 2008-10-22 | 2013-07-31 | 日産自動車株式会社 | 距離計測装置および距離計測方法 |
| CN101794065A (zh) | 2009-02-02 | 2010-08-04 | 中强光电股份有限公司 | 投影显示系统 |
| US20100223706A1 (en) | 2009-03-03 | 2010-09-09 | Illinois Tool Works Inc. | Welding helmet audio communication systems and methods with bone conduction transducers |
| JP5484098B2 (ja) | 2009-03-18 | 2014-05-07 | 三菱電機株式会社 | 投写光学系及び画像表示装置 |
| JP4991787B2 (ja) | 2009-04-24 | 2012-08-01 | パナソニック株式会社 | 反射型光電センサ |
| WO2010140059A2 (en) * | 2009-06-01 | 2010-12-09 | Gerd Hausler | Method and device for three-dimensional surface detection with a dynamic reference frame |
| GB0921461D0 (en) | 2009-12-08 | 2010-01-20 | Qinetiq Ltd | Range based sensing |
| US8320621B2 (en) | 2009-12-21 | 2012-11-27 | Microsoft Corporation | Depth projector system with integrated VCSEL array |
| US20110188054A1 (en) | 2010-02-02 | 2011-08-04 | Primesense Ltd | Integrated photonics module for optical projection |
| JP2011169701A (ja) | 2010-02-17 | 2011-09-01 | Sanyo Electric Co Ltd | 物体検出装置および情報取得装置 |
| JP5612916B2 (ja) | 2010-06-18 | 2014-10-22 | キヤノン株式会社 | 位置姿勢計測装置、その処理方法、プログラム、ロボットシステム |
| JP5499985B2 (ja) | 2010-08-09 | 2014-05-21 | ソニー株式会社 | 表示装置組立体 |
| WO2012023256A2 (en) | 2010-08-19 | 2012-02-23 | Canon Kabushiki Kaisha | Three-dimensional measurement apparatus, method for three-dimensional measurement, and computer program |
| JP5163713B2 (ja) | 2010-08-24 | 2013-03-13 | カシオ計算機株式会社 | 距離画像センサ及び距離画像生成装置並びに距離画像データ取得方法及び距離画像生成方法 |
| US20120056982A1 (en) | 2010-09-08 | 2012-03-08 | Microsoft Corporation | Depth camera based on structured light and stereo vision |
| US8593535B2 (en) | 2010-09-10 | 2013-11-26 | Apple Inc. | Relative positioning of devices based on captured images of tags |
| EP2433716A1 (en) | 2010-09-22 | 2012-03-28 | Hexagon Technology Center GmbH | Surface spraying device with a nozzle control mechanism and a corresponding method |
| CN103229018A (zh) * | 2010-10-27 | 2013-07-31 | 株式会社尼康 | 形状测定装置、结构的制造方法以及结构制造系统 |
| TWI428558B (zh) | 2010-11-10 | 2014-03-01 | Pixart Imaging Inc | 測距方法、測距系統與其處理軟體 |
| JP5815940B2 (ja) | 2010-12-15 | 2015-11-17 | キヤノン株式会社 | 距離計測装置、距離計測方法、およびプログラム |
| US9888225B2 (en) | 2011-02-04 | 2018-02-06 | Koninklijke Philips N.V. | Method of recording an image and obtaining 3D information from the image, camera system |
| JP5746529B2 (ja) * | 2011-03-16 | 2015-07-08 | キヤノン株式会社 | 三次元距離計測装置、三次元距離計測方法、およびプログラム |
| WO2012123948A1 (en) | 2011-03-17 | 2012-09-20 | Mirobot Ltd. | System and method for three dimensional teat modeling for use with a milking system |
| JP2014122789A (ja) | 2011-04-08 | 2014-07-03 | Sanyo Electric Co Ltd | 情報取得装置、投射装置および物体検出装置 |
| DE112012001708B4 (de) * | 2011-04-15 | 2018-05-09 | Faro Technologies, Inc. | Koordinatenmessgerät |
| JP5830270B2 (ja) | 2011-05-24 | 2015-12-09 | オリンパス株式会社 | 内視鏡装置および計測方法 |
| JP6025830B2 (ja) | 2011-06-07 | 2016-11-16 | クレアフォーム・インコーポレイテッドCreaform Inc. | 3d走査用のセンサ位置決め |
| KR101974651B1 (ko) | 2011-06-22 | 2019-05-02 | 성균관대학교산학협력단 | 경계선 상속을 통하여 계층적으로 직교화된 구조광을 디코딩하는 방법 및 이를 이용하는 3차원 거리 영상 측정 시스템 |
| US10054430B2 (en) | 2011-08-09 | 2018-08-21 | Apple Inc. | Overlapping pattern projector |
| KR101605224B1 (ko) | 2011-10-05 | 2016-03-22 | 한국전자통신연구원 | 패턴 광을 이용한 깊이 정보 획득 장치 및 방법 |
| US9142025B2 (en) | 2011-10-05 | 2015-09-22 | Electronics And Telecommunications Research Institute | Method and apparatus for obtaining depth information using optical pattern |
| CN102387330A (zh) * | 2011-10-27 | 2012-03-21 | 王悦 | 一种不规则表面成像方法 |
| TW201329509A (zh) | 2012-01-10 | 2013-07-16 | Walsin Lihwa Corp | 立體掃瞄裝置及其立體掃瞄方法 |
| US9986208B2 (en) | 2012-01-27 | 2018-05-29 | Qualcomm Incorporated | System and method for determining location of a device using opposing cameras |
| BR112014018573A8 (pt) | 2012-01-31 | 2017-07-11 | 3M Innovative Properties Company | Método e aparelho para medição da estrutura tridimensional de uma superfície |
| WO2013129387A1 (ja) | 2012-03-01 | 2013-09-06 | 日産自動車株式会社 | 距離計測装置及び距離計測方法 |
| WO2013145164A1 (ja) | 2012-03-28 | 2013-10-03 | 富士通株式会社 | 撮像装置 |
| US9590122B2 (en) | 2012-05-18 | 2017-03-07 | Siemens Healthcare Diagnostics Inc. | Fish eye lens analyzer |
| US8699005B2 (en) | 2012-05-27 | 2014-04-15 | Planitar Inc | Indoor surveying apparatus |
| EP2872030B1 (en) | 2012-07-10 | 2016-12-07 | WaveLight GmbH | Process and apparatus for determining optical aberrations of an eye |
| US20140016113A1 (en) | 2012-07-13 | 2014-01-16 | Microsoft Corporation | Distance sensor using structured light |
| JP2014020978A (ja) | 2012-07-20 | 2014-02-03 | Fujitsu Ltd | 照射装置、距離測定装置、照射装置のキャリブレーションプログラム及びキャリブレーション方法 |
| EP2696590B1 (en) | 2012-08-06 | 2014-09-24 | Axis AB | Image sensor positioning apparatus and method |
| US9275459B2 (en) | 2012-10-05 | 2016-03-01 | Qualcomm Incorporated | Method and apparatus for calibrating an imaging device |
| US9741184B2 (en) | 2012-10-14 | 2017-08-22 | Neonode Inc. | Door handle with optical proximity sensors |
| CN104884862B (zh) | 2012-10-24 | 2019-11-19 | 视瑞尔技术公司 | 照明设备 |
| US9285893B2 (en) | 2012-11-08 | 2016-03-15 | Leap Motion, Inc. | Object detection and tracking with variable-field illumination devices |
| WO2014097539A1 (ja) | 2012-12-20 | 2014-06-26 | パナソニック株式会社 | 3次元測定装置および3次元測定方法 |
| US10466359B2 (en) | 2013-01-01 | 2019-11-05 | Inuitive Ltd. | Method and system for light patterning and imaging |
| US9691163B2 (en) | 2013-01-07 | 2017-06-27 | Wexenergy Innovations Llc | System and method of measuring distances related to an object utilizing ancillary objects |
| US9230339B2 (en) * | 2013-01-07 | 2016-01-05 | Wexenergy Innovations Llc | System and method of measuring distances related to an object |
| US8768559B1 (en) | 2013-01-22 | 2014-07-01 | Qunomic Virtual Technology, LLC | Line projection system |
| US9142019B2 (en) | 2013-02-28 | 2015-09-22 | Google Technology Holdings LLC | System for 2D/3D spatial feature processing |
| US9364167B2 (en) | 2013-03-15 | 2016-06-14 | Lx Medical Corporation | Tissue imaging and image guidance in luminal anatomic structures and body cavities |
| US10105149B2 (en) | 2013-03-15 | 2018-10-23 | Board Of Regents Of The University Of Nebraska | On-board tool tracking system and methods of computer assisted surgery |
| US20140320605A1 (en) | 2013-04-25 | 2014-10-30 | Philip Martin Johnson | Compound structured light projection system for 3-D surface profiling |
| US9536339B1 (en) | 2013-06-13 | 2017-01-03 | Amazon Technologies, Inc. | Processing unordered point cloud |
| US10061028B2 (en) | 2013-09-05 | 2018-08-28 | Texas Instruments Incorporated | Time-of-flight (TOF) assisted structured light imaging |
| JP6211876B2 (ja) | 2013-10-01 | 2017-10-11 | 株式会社トプコン | 測定方法及び測定装置 |
| CN103559735B (zh) | 2013-11-05 | 2017-03-01 | 重庆安钻理科技股份有限公司 | 一种三维重建方法及系统 |
| US9404742B2 (en) | 2013-12-10 | 2016-08-02 | GM Global Technology Operations LLC | Distance determination system for a vehicle using holographic techniques |
| US10372982B2 (en) | 2014-01-06 | 2019-08-06 | Eyelock Llc | Methods and apparatus for repetitive iris recognition |
| GB2522248A (en) | 2014-01-20 | 2015-07-22 | Promethean Ltd | Interactive system |
| KR102166691B1 (ko) | 2014-02-27 | 2020-10-16 | 엘지전자 주식회사 | 객체의 3차원 형상을 산출하는 장치 및 방법 |
| US9526427B2 (en) | 2014-03-21 | 2016-12-27 | Hypermed Imaging, Inc. | Compact light sensors with symmetrical lighting |
| US9307231B2 (en) | 2014-04-08 | 2016-04-05 | Lucasfilm Entertainment Company Ltd. | Calibration target for video processing |
| US10147198B2 (en) | 2014-04-30 | 2018-12-04 | Shinano Kenshi Co., Ltd. | Measurement device |
| JP5829306B2 (ja) | 2014-05-12 | 2015-12-09 | ファナック株式会社 | レンジセンサの配置位置評価装置 |
| US10207193B2 (en) | 2014-05-21 | 2019-02-19 | Universal City Studios Llc | Optical tracking system for automation of amusement park elements |
| US20150347833A1 (en) * | 2014-06-03 | 2015-12-03 | Mark Ries Robinson | Noncontact Biometrics with Small Footprint |
| US9699393B2 (en) | 2014-06-26 | 2017-07-04 | Semiconductor Components Industries, Llc | Imaging systems for infrared and visible imaging with patterned infrared cutoff filters |
| US9377533B2 (en) | 2014-08-11 | 2016-06-28 | Gerard Dirk Smits | Three-dimensional triangulation and time-of-flight based tracking systems and methods |
| WO2016024203A2 (en) * | 2014-08-12 | 2016-02-18 | Mantisvision Ltd. | System, method and computer program product to project light pattern |
| KR20160020323A (ko) | 2014-08-13 | 2016-02-23 | 옥은호 | 평행 적외선 투사기와 카메라 모듈로 구성되는 거리 측정 센서 |
| JP6370177B2 (ja) | 2014-09-05 | 2018-08-08 | 株式会社Screenホールディングス | 検査装置および検査方法 |
| US10268906B2 (en) * | 2014-10-24 | 2019-04-23 | Magik Eye Inc. | Distance sensor with directional projection beams |
| CN105981074B (zh) | 2014-11-04 | 2018-02-02 | 深圳市大疆创新科技有限公司 | 用于标定成像装置的系统、方法和装置 |
| US20160128553A1 (en) | 2014-11-07 | 2016-05-12 | Zheng Jason Geng | Intra- Abdominal Lightfield 3D Endoscope and Method of Making the Same |
| US20160157725A1 (en) | 2014-12-08 | 2016-06-09 | Luis Daniel Munoz | Device, system and methods for assessing tissue structures, pathology, and healing |
| KR102369792B1 (ko) | 2015-03-05 | 2022-03-03 | 한화테크윈 주식회사 | 촬영 장치 및 촬영 방법 |
| JP6484072B2 (ja) | 2015-03-10 | 2019-03-13 | アルプスアルパイン株式会社 | 物体検出装置 |
| JP6436349B2 (ja) | 2015-03-10 | 2018-12-12 | アルプス電気株式会社 | 物体検出装置 |
| JP6340477B2 (ja) | 2015-03-26 | 2018-06-06 | 富士フイルム株式会社 | 距離画像取得装置及び距離画像取得方法 |
| CN107709925B (zh) | 2015-03-27 | 2018-12-14 | 富士胶片株式会社 | 距离图像获取装置 |
| US9694498B2 (en) | 2015-03-30 | 2017-07-04 | X Development Llc | Imager for detecting visual light and projected patterns |
| US10215557B2 (en) | 2015-03-30 | 2019-02-26 | Fujifilm Corporation | Distance image acquisition apparatus and distance image acquisition method |
| TW201706563A (zh) | 2015-05-10 | 2017-02-16 | 麥吉克艾公司 | 距離感測器(一) |
| US10488192B2 (en) | 2015-05-10 | 2019-11-26 | Magik Eye Inc. | Distance sensor projecting parallel patterns |
| DE102015209143B4 (de) | 2015-05-19 | 2020-02-27 | Esaote S.P.A. | Verfahren zur Bestimmung einer Abbildungsvorschrift und bildgestützten Navigation sowie Vorrichtung zur bildgestützten Navigation |
| WO2016194018A1 (ja) | 2015-05-29 | 2016-12-08 | オリンパス株式会社 | 照明装置及び計測装置 |
| KR20170005649A (ko) | 2015-07-06 | 2017-01-16 | 엘지전자 주식회사 | 3차원 깊이 카메라 모듈 및 이를 구비하는 이동 단말기 |
| US10223793B1 (en) | 2015-08-05 | 2019-03-05 | Al Incorporated | Laser distance measuring method and system |
| DE102015115011A1 (de) | 2015-09-08 | 2017-03-09 | Valeo Schalter Und Sensoren Gmbh | Laserscanner für Kraftfahrzeuge |
| US9989357B2 (en) * | 2015-09-09 | 2018-06-05 | Faro Technologies, Inc. | Aerial device that cooperates with an external projector to measure three-dimensional coordinates |
| WO2017053368A1 (en) * | 2015-09-23 | 2017-03-30 | East Carolina University | Methods, systems and computer program products for determining object distances and target dimensions using light emitters |
| US20170094251A1 (en) * | 2015-09-30 | 2017-03-30 | Faro Technologies, Inc. | Three-dimensional imager that includes a dichroic camera |
| US10176554B2 (en) | 2015-10-05 | 2019-01-08 | Google Llc | Camera calibration using synthetic images |
| JP6597150B2 (ja) | 2015-10-09 | 2019-10-30 | 富士通株式会社 | 距離測定装置、距離測定方法、距離測定プログラムおよびテーブルの作成方法 |
| FR3042610B1 (fr) | 2015-10-14 | 2018-09-07 | Quantificare | Dispositif et procede pour reconstruire en trois dimensions la tete et le corps |
| US10942261B2 (en) | 2015-10-21 | 2021-03-09 | Samsung Electronics Co., Ltd | Apparatus for and method of range sensor based on direct time-of-flight and triangulation |
| US10225544B2 (en) | 2015-11-19 | 2019-03-05 | Hand Held Products, Inc. | High resolution dot pattern |
| CN108369089B (zh) | 2015-11-25 | 2020-03-24 | 三菱电机株式会社 | 3维图像测量装置及方法 |
| KR20170094968A (ko) | 2016-02-12 | 2017-08-22 | 엘지이노텍 주식회사 | 피사체 거리 측정 부재, 이를 갖는 카메라 모듈 |
| US11030775B2 (en) | 2016-03-17 | 2021-06-08 | Flir Systems, Inc. | Minimal user input video analytics systems and methods |
| CN113727000A (zh) | 2016-05-27 | 2021-11-30 | 松下知识产权经营株式会社 | 摄像系统 |
| US9686539B1 (en) | 2016-06-12 | 2017-06-20 | Apple Inc. | Camera pair calibration using non-standard calibration objects |
| CN105974427B (zh) * | 2016-06-24 | 2021-05-04 | 上海图漾信息科技有限公司 | 结构光测距装置及方法 |
| KR102595391B1 (ko) | 2016-12-07 | 2023-10-31 | 매직 아이 인코포레이티드 | 조정 가능한 초점 이미징 센서를 포함한 거리 센서 |
| US20180227566A1 (en) | 2017-02-06 | 2018-08-09 | Microsoft Technology Licensing, Llc | Variable field of view and directional sensors for mobile machine vision applications |
| US10819922B2 (en) | 2017-02-21 | 2020-10-27 | Nanolux Co. Ltd. | Solid-state imaging element and imaging device |
| US11025887B2 (en) | 2017-02-27 | 2021-06-01 | Sony Corporation | Field calibration of stereo cameras with a projector |
| WO2018211588A1 (ja) | 2017-05-16 | 2018-11-22 | オリンパス株式会社 | 撮像装置、撮像方法及びプログラム |
| US10769914B2 (en) | 2017-06-07 | 2020-09-08 | Amazon Technologies, Inc. | Informative image data generation using audio/video recording and communication devices |
| WO2019041116A1 (zh) | 2017-08-29 | 2019-03-07 | 深圳市汇顶科技股份有限公司 | 光学测距方法以及光学测距装置 |
| US10885761B2 (en) | 2017-10-08 | 2021-01-05 | Magik Eye Inc. | Calibrating a sensor system including multiple movable sensors |
| US10679076B2 (en) * | 2017-10-22 | 2020-06-09 | Magik Eye Inc. | Adjusting the projection system of a distance sensor to optimize a beam layout |
| WO2019182881A1 (en) | 2018-03-20 | 2019-09-26 | Magik Eye Inc. | Distance measurement using projection patterns of varying densities |
| JP7354133B2 (ja) | 2018-03-20 | 2023-10-02 | マジック アイ インコーポレイテッド | 三次元深度検知及び二次元撮像のためのカメラ露出調節 |
| JP7039388B2 (ja) | 2018-05-24 | 2022-03-22 | 株式会社トプコン | 測量装置 |
| CN112513565B (zh) | 2018-06-06 | 2023-02-10 | 魔眼公司 | 使用高密度投影图案的距离测量 |
| US11475584B2 (en) | 2018-08-07 | 2022-10-18 | Magik Eye Inc. | Baffles for three-dimensional sensors having spherical fields of view |
| US10638104B2 (en) * | 2018-09-14 | 2020-04-28 | Christie Digital Systems Usa, Inc. | Device, system and method for generating updated camera-projector correspondences from a reduced set of test patterns |
| WO2020117785A1 (en) | 2018-12-08 | 2020-06-11 | Magik Eye Inc. | Vertical cavity surface emitting laser-based projector |
| WO2020150131A1 (en) | 2019-01-20 | 2020-07-23 | Magik Eye Inc. | Three-dimensional sensor including bandpass filter having multiple passbands |
| JP2020139869A (ja) * | 2019-02-28 | 2020-09-03 | キヤノン株式会社 | 計測装置、算出方法、システム及びプログラム |
-
2018
- 2018-10-03 EP EP18864725.9A patent/EP3692396A4/en active Pending
- 2018-10-03 US US16/150,918 patent/US11199397B2/en active Active
- 2018-10-03 JP JP2020519793A patent/JP7565212B2/ja active Active
- 2018-10-03 CN CN201880078855.2A patent/CN111492262B/zh active Active
- 2018-10-03 KR KR1020207013018A patent/KR20200054326A/ko active IP Right Grant
- 2018-10-03 WO PCT/US2018/054183 patent/WO2019070867A2/en active Application Filing
- 2018-10-08 TW TW107135347A patent/TWI813587B/zh active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3692396A4 (en) | 2021-07-21 |
| TWI813587B (zh) | 2023-09-01 |
| JP2020537237A (ja) | 2020-12-17 |
| CN111492262A (zh) | 2020-08-04 |
| CN111492262B (zh) | 2024-06-28 |
| WO2019070867A2 (en) | 2019-04-11 |
| WO2019070867A3 (en) | 2019-05-09 |
| EP3692396A2 (en) | 2020-08-12 |
| US11199397B2 (en) | 2021-12-14 |
| TW201923302A (zh) | 2019-06-16 |
| US20190107387A1 (en) | 2019-04-11 |
| JP7565212B2 (ja) | 2024-10-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7565212B2 (ja) | 縦グリッドパターンを使用した距離測定 | |
| TWI795451B (zh) | 用於調整距離感測器的投影系統以使光束分佈最佳化的方法、非暫態機器可讀取儲存媒體和設備 | |
| US10228243B2 (en) | Distance sensor with parallel projection beams | |
| KR102543275B1 (ko) | 평행 패턴들을 투사하는 거리 센서 | |
| US11062468B2 (en) | Distance measurement using projection patterns of varying densities | |
| US9142025B2 (en) | Method and apparatus for obtaining depth information using optical pattern | |
| US20180143018A1 (en) | Distance sensor projecting parallel patterns | |
| US11474209B2 (en) | Distance measurement using high density projection patterns | |
| KR20220122645A (ko) | 3차원 좌표를 2차원 피처 포인트와 연관 | |
| CN109690241A (zh) | 三维测定装置和三维测定方法 | |
| KR102685251B1 (ko) | 빔 레이아웃을 최적화하기 위한 거리 센서의 투영 시스템 조정 | |
| JP2011059009A (ja) | 位置計測対象物、位置計測システム、位置計測用演算装置およびプログラム | |
| US10701293B2 (en) | Method for compensating for off-axis tilting of a lens | |
| JP2024009548A (ja) | 3次元形状計測装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right |