KR20200051842A - 이동체 장치, 노광 장치, 및 디바이스 제조 방법 - Google Patents
이동체 장치, 노광 장치, 및 디바이스 제조 방법 Download PDFInfo
- Publication number
- KR20200051842A KR20200051842A KR1020207012812A KR20207012812A KR20200051842A KR 20200051842 A KR20200051842 A KR 20200051842A KR 1020207012812 A KR1020207012812 A KR 1020207012812A KR 20207012812 A KR20207012812 A KR 20207012812A KR 20200051842 A KR20200051842 A KR 20200051842A
- Authority
- KR
- South Korea
- Prior art keywords
- axis direction
- stage
- substrate
- exposure apparatus
- axis
- Prior art date
Links
Images



Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70716—Stages
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70758—Drive means, e.g. actuators, motors for long- or short-stroke modules or fine or coarse driving
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70791—Large workpieces, e.g. glass substrates for flat panel displays or solar panels
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/6831—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using electrostatic chucks
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/6838—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping with gripping and holding devices using a vacuum; Bernoulli devices
Landscapes
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Sustainable Development (AREA)
- Life Sciences & Earth Sciences (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
Abstract
액정 노광 장치에서는, 2개의 정반 (12A, 12B) 상에 각각 베이스 패드 (72A, 72B) 가 배치되고, 베이스 패드 (72A 및 72B) 에 의해 하나의 스텝 보드 (71) 가 지지된다. 자중 소거 디바이스 (40) 의 디바이스 본체 (60) 는, 스텝 보드 (71) 상에서 이동함으로써, 정반 (12A) 위로부터 정반 (12B) 위로 (또는 그 반대로) 이동하므로, 분리하여 배치되는 인접하는 정반들 (12A, 12B) 사이의 경계부는, 자중 소거 디바이스 (40) 가 이동할 때에 이용되는 가이드면으로서 기능하지 않는다. 따라서, 2개의 정반 (12A, 12B) 을 이간시켜 배치하더라도, 기판 (P) 을 유지하는 미동 스테이지 (21) 가 XY평면을 따라 고 정밀도로 안내될 수 있다.
Description
본 발명은, 이동체 장치, 노광 장치, 및 디바이스 제조 방법과 관한 것으로서, 보다 구체적으로, 소정의 2차원 평면을 따라 이동하는 이동체가 구비된 이동체 장치, 이동체 장치가 구비된 노광 장치, 및 노광 장치를 이용하는 디바이스 제조 방법에 관한 것이다.
종래, 액정 디스플레이 소자, 반도체 소자 (집적회로 등) 등의 전자 디바이스 (마이크로 디바이스) 를 제조하는 리소그래피 공정에서는, 주로, 스텝-앤드-리피트 방식의 투영 노광 장치 (소위, 스테퍼), 혹은 스텝-앤드-스캔 방식의 투영 노광 장치 (소위, 스캐닝 스테퍼 (스캐너로도 지칭됨)) 등이 이용되고 있다.
그런데, 최근 몇 년, 노광 장치의 노광 대상인 기판 (특히 액정 노광 장치의 노광 대상인 유리 플레이트) 은, 보다 대형화되는 경향에 있으며, 노광 장치에서도, 기판을 유지하는 기판 테이블의 크기가 증가하고, 크기 증가에 수반하는 중량 증가에 의해 기판의 위치 제어가 곤란해지고 있다. 이러한 문제를 해결하는 것으로서, 기판을 유지하는 기판 테이블의 자중 (empty-weight) 이, 원통형의 부재로 이루어진 자중 소거 디바이스 (자중 캔슬러 (empty-weight canceller)) 에 의해 지지되는 노광 장치가 개발되어 있다 (예컨대, 특허문헌 1 참조).
이 유형의 노광 장치에서, 자중 소거 디바이스는, 예를 들어 석재에 의해 형성된 판형 부재인 정반 (surface plate) 의 상면 (가이드면) 을 따라 기판 테이블과 일체로 이동한다. 또한, 정반의 가이드면은 기판 테이블을 고 정밀도로 2차원 평면을 따라 안내하는 데 사용되므로, 가이드면은 매우 높은 평탄도를 갖도록 완성된다.
그러나, 대형화한 기판을 긴 스트로크로 구동하기 위해서는, 자중 소거 디바이스가 이동할 때 가이드면을 갖는 정반의 크기를 증가시킬 필요가 있으므로, 정반의 가공이 곤란하게 된다. 또한, 정반이 대형화하는 경우, 노광 장치가 설치되는 장소 (예컨대, 액정 패널의 제조 공장) 에 정반을 반송 (예컨대, 차량에 의한 수송) 하는 것이 곤란하게 된다.
본 발명의 제 1 양태에 따르면, 서로 직교하는 제 1 축 및 제 2 축을 포함하는 2차원 평면에 평행한 가이드면을 각각 가지며, 제 1 축에 평행한 방향으로 미리 결정된 간격으로 배치된 복수의 정반; 복수의 정반 위에서 2차원 평면에 평행한 평면을 따라 이동가능한 제 1 이동체; 제 1 이동체의 자중을 지지하고, 제 1 이동체와 함께 복수의 정반 위에서 2차원 평면에 평행한 면 내에서 이동하는 제 1 지지 부재; 제 1 지지 부재가 제 1 축에 평행한 방향으로 상대 이동가능하도록 제 1 지지 부재를 지지하는 제 2 지지 부재; 및 복수의 정반 각각에 대응하도록 배치되고, 제 2 지지 부재가 복수의 정반 사이에서 브리징되는 상태로 제 2 지지 부재를 지지하는 복수의 제 3 지지 부재를 포함하는, 이동체 장치가 제공된다.
이 장치에 의하면, 제 1 축에 평행한 방향으로 소정의 간격으로 배치된 복수의 정반 위에서 제 1 이동체와 함께 이동하는 제 1 지지 부재는, 제 1 축에 평행한 방향으로 이동할 때, 복수의 정반 각각 대응하도록 배치된 복수의 제 3 지지 부재에 의해 지지되는 제 2 지지 부재 상에서 이동한다. 제 2 지지 부재는, 복수의 제 3 지지 부재를 통해 복수의 정반 사이에서 브리징되도록 (걸쳐서) 배치되어 있으므로, 제 1 지지 부재가 인접하는 정반의 일방의 위로부터 타방의 위로 이동하는 경우이더라도, 제 1 지지 부재는 2차원 평면을 따라 고 정밀도로 안내될 수 있다.
본 발명의 제 2 양태에 따르면, 에너지 빔으로 물체를 조사하여 물체를 노광하는 노광 장치로서, 제 1 이동체 상에 물체가 유지되는 제 1 항 내지 제 16 항 중 어느 한 항에 기재된 이동체 장치; 및 제 1 이동체 상에 탑재된 물체를 에너지 빔으로 조사하는 패터닝 디바이스를 포함하는, 노광 장치가 제공된다.
본 발명의 제 3 양태에 따르면, 에너지 빔으로 물체를 조사하여 물체를 노광하는 노광 장치로서, 서로 직교하는 제 1 축 및 제 2 축을 포함하는 2차원 평면에 평행한 가이드면을 각각 가지며, 제 1 축에 평행한 방향으로 미리 결정된 간격으로 배치된 복수의 정반; 물체를 유지하면서 복수의 정반 위에서 2차원 평면에 평행한 평면을 따라 이동가능한 제 1 스테이지; 제 1 스테이지의 자중을 지지하고, 제 1 스테이지와 함께 복수의 정반 위에서 2차원 평면에 평행한 면 내에서 이동하는 자중 소거 부재; 자중 소거 부재가 제 1 축에 평행한 방향으로 상대 이동가능하도록 자중 소거 부재를 지지하는 판 부재; 복수의 정반에 각각 대응하도록 배치되고, 판 부재가 복수의 정반 사이에서 브리징되는 상태로 판 부재를 지지하는 복수의 지지 부재; 및 제 1 스테이지 상에 유지된 물체를 에너지 빔으로 조사하는 패터닝 디바이스를 포함하는, 노광 장치가 제공된다.
이 장치에 의하면, 자중 소거 부재가 인접하는 정반의 일방의 위로부터 타방의 위로 이동하는 경우이더라도, 자중 소거 부재가 2차원 평면을 따라 고 정밀도로 안내될 수 있다. 따라서, 노광 시에, 물체를 유지하는 제 1 스테이지의 자중이 자중 소거 부재에 의해 지지될 수 있고, 자중 소거 부재가 2 차원 평면을 따라 안내될 수 있으며, 이에 의해 제 1 스테이지에 유지된 물체를 제 1 축 방향으로 안정적인 방식으로 구동하는 것이 가능하게 되어, 노광이 고 정밀도로 수행될 수 있다.
본 발명의 제 4 양태에 따르면, 본 발명의 제 1 및 제 2 노광 장치 중 일방을 이용하여 기판을 노광하는 단계; 및 노광된 기판을 현상하는 단계를 포함하는, 디바이스 제조 방법이 제공된다.
이 경우, 기판으로서 플랫 패널 디스플레이용의 기판을 이용함으로써, 디바이스로서 플랫 패널 디스플레이를 제조하는 제조 방법이 제공된다. 플랫 패널 디스플레이용의 기판은 유리 기판 등 외에도 필름-형 부재 등을 포함한다.
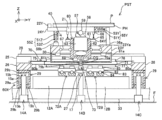
도 1 은 일 실시형태의 액정 노광 장치의 개략적인 구성을 나타내는 도면이다.
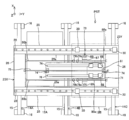
도 2 는 노광 장치가 구비된 기판 스테이지를 X축 방향에서 본 측면 (일부 단면) 도이다.
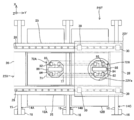
도 3 은 노광 장치가 구비된 기판 스테이지를 Y축 방향에서 본 측면도 (부분 단면도) 이다.
도 4 는 기판 스테이지를 일부 생략하여 나타내는 (제 1) 평면도이다.
도 5 는 기판 스테이지를 일부 생략하여 나타내는 (제 2) 평면도이다.
도 6 의 (A) 내지 (C) 는 기판을 스텝 방향 (Y축 방향) 으로 구동할 때의 기판 스테이지의 동작을 설명하는 데 사용되는 도면이다.
도 2 는 노광 장치가 구비된 기판 스테이지를 X축 방향에서 본 측면 (일부 단면) 도이다.
도 3 은 노광 장치가 구비된 기판 스테이지를 Y축 방향에서 본 측면도 (부분 단면도) 이다.
도 4 는 기판 스테이지를 일부 생략하여 나타내는 (제 1) 평면도이다.
도 5 는 기판 스테이지를 일부 생략하여 나타내는 (제 2) 평면도이다.
도 6 의 (A) 내지 (C) 는 기판을 스텝 방향 (Y축 방향) 으로 구동할 때의 기판 스테이지의 동작을 설명하는 데 사용되는 도면이다.
이하, 본 발명의 일 실시형태에 대해, 도 1 내지 도 6 의 (C) 를 참조하여 설명한다.
도 1 은 일 실시형태와 관련되는 액정 노광 장치 (10) 의 개략적인 구성을 나타낸다. 이 액정 노광 장치 (10) 는, 스텝-앤드-스캔 방식에 의한 투영 노광 장치, 즉, 소위, 스캐너이다.
액정 노광 장치 (10) 는, 도 1 에 나타낸 바와 같이, 조명계 (IOP), 마스크 (M) 를 유지하는 마스크 스테이지 (MST), 투영 광학계 (PL), 마스크 스테이지 (MST), 투영 광학계 (PL) 등이 탑재된 바디 (BD), 기판 (P) 이 XY평면을 따라 이동가능하도록 기판 (P) 를 유지하는 기판 스테이지 (PST), 및 이러한 제어계 등을 포함한다. 이하의 설명에서는, 노광 시에 마스크 (M) 와 기판 (P) 이 투영 광학계 (PL) 에 대해서 각각 상대 주사될 방향을 X축 방향으로 하고, 수평면 내에서 X축 방향에 직교하는 방향을 Y축 방향으로 하고, X축 및 Y축 방향에 직교하는 방향을 Z축 방향으로 하고, X축, Y축, 및 Z축 회전의 회전 (경사) 방향을 각각 θx, θy, 및 θz 방향으로 하여, 설명하기로 한다.
조명계 (IOP) 는, 예를 들어 미국 특허 제 6,552,775호 등에 개시되는 조명계와 유사하게 구성된다. 보다 구체적으로, 조명계 (IOP) 는, 수은 램프 (미도시) 로부터 사출된 광을 이용하여, 각각 도시되지 않은 반사경, 색선별 거울, 셔터, 파장 선택 필터, 각종 유형들의 렌즈와 같은 광학 소자들을 통해, 노광용 조명광 (조명광) (IL) 으로서 마스크 (M) 를 조사한다. 조명광 (IL) 으로서는, 예를 들어 i선 (파장 365nm), g선 (파장 436nm), h선 (파장 405nm) 등의 광 (혹은, 상기 i선, g선, h선의 합성광) 이 이용된다. 또한, 조명광 (IL) 의 파장은, 파장 선택 필터에 의해, 요구되는 해상도에 따라 적절히 교체될 수 있다.
마스크 스테이지 (MST) 에는, 회로 패턴 등이 형성되는 패턴면 (도 1 에서의 하면) 을 갖는 마스크 (M) 가, 예를 들어 진공 흡착에 의해 고정된다. 마스크 스테이지 (MST) 는, 후술하는 바디 (BD) 의 일부인 경통 정반 (31) 의 표면에 일체로 고정된 X축 방향을 길이 방향으로 하는 한 쌍의 마스크 스테이지 가이드 (35) 상에서, 예를 들어 미도시의 에어 패드를 통해 비접촉 방식으로 지지된다. 마스크 스테이지 (MST) 는, 예를 들어 리니어 모터를 포함하는 마스크 스테이지 구동계 (미도시) 에 의해, 한 쌍의 마스크 스테이지 가이드 (35) 위에서, 주사 방향 (X축 방향) 으로 소정의 스트로크로 구동되는 것과 동시에, Y축 방향, 및 θz 방향으로 미세 구동된다.
마스크 스테이지 (MST) 의 XY평면 내의 위치 정보 (θz 방향의 회전 정보를 포함함) 는, 마스크 레이저 간섭계 (이하, "마스크 간섭계" 로 지칭됨) (91) 에 의해, 마스크 스테이지 (MST) 에 고정된 (혹은 형성된) 반사면을 통해, 예를 들어 0.5 내지 1nm 정도의 해상도로 상시 검출된다. 마스크 간섭계 (91) 의 계측값들은, 미도시의 제어기로 전송되고, 제어기는, 마스크 간섭계 (91) 의 계측값에 기초하여 마스크 스테이지 구동계를 통해 마스크 스테이지 (MST) 의 X축 방향, Y축 방향 및 θz 방향에서의 위치 (및 속도) 를 제어한다.
투영 광학계 (PL) 는, 도 1 에서 마스크 스테이지 (MST) 의 하부에서 경통 정반 (31) 에 의해 지지된다. 본 실시형태에서의 투영 광학계 (PL) 는, 예를 들어 미국 특허 제 6,552,775호에 개시된 투영 광학계와 유사한 구성을 갖는다. 보다 구체적으로, 투영 광학계 (PL) 는, 마스크 (M) 의 패턴 이미지가 투영되는 투영 영역들이 지그재그 (zigzag) 형상으로 배치된 복수의 투영 광학계 (멀티 렌즈 투영 광학계) 를 포함하고, Y축 방향을 길이 방향으로 하는 직사각 형상을 갖는 단일의 이미지 필드를 갖는 투영 광학계와 동등하게 기능한다. 본 실시형태에서는, 복수의 투영 광학계의 각각으로서는, 예를 들어 정립 정상 이미지를 형성하는 양측 텔레센트릭 (telecentric) 등배계인 투영 광학계가 이용된다. 이하의 설명에서는, 투영 광학계 (PL) 의 지그재그 형상으로 배치된 복수의 투영 영역들은 전체로서 노광 영역으로도 지칭된다.
그러므로, 조명계 (IOP) 로부터의 조명광 (IL) 을 이용하여 마스크 (M) 상의 조명 영역이 조명되는 경우, 투영 광학계 (PL) 의 제 1 면 (물체면) 과 패턴면이 거의 일치되어 배치되는 마스크 (M) 를 통과한 조명광 (IL) 에 의해, 투영 광학계 (PL) 를 통해 그 조명 영역 내의 마스크 (M) 의 회로 패턴의 투영된 이미지 (부분 정립상) 가, 투영 광학계 (PL) 의 제 2 면 (이미지 면) 상에 배치되고 그 표면에 레지스트 (감응제) 가 도포된 기판 (P) 상의 조명 영역에 공역인 조명광 (IL) 의 조사 영역 (노광 영역) 상에 형성된다. 그 후, 마스크 스테이지 (MST) 와 기판 스테이지 (PST) 의 동기 구동에 의해, 조명 영역 (조명광 (IL)) 에 대해 마스크 (M) 를 주사 방향 (X축 방향) 으로 상대 이동시키는 것과 동시에 노광 영역 (조명광 (IL)) 에 대해서 기판 (P) 을 주사 방향 (X축 방향) 으로 상대 이동시키는 것에 의해, 기판 (P) 상의 하나의 샷 영역 (구획 영역) 의 주사 노광을 수행하고, 샷 영역에 마스크 (M) 의 패턴이 전사된다. 보다 구체적으로, 본 실시형태에서는 조명계 (IOP) 및 투영 광학계 (PL) 에 의해 기판 (P) 상에 마스크 (M) 의 패턴이 생성되고, 조명광 (IL) 으로 기판 (P) 상의 감응층 (레지스트층) 의 노광에 의해서 기판 (P) 상에 그 패턴이 형성된다.
바디 (BD) 는, 예를 들어 미국 특허출원 공개 제2008/0030702호 등에 개시된 바와 같이, 한 쌍의 기판 스테이지 발판 (33) (도 3 참조), 및 한 쌍의 기판 스테이지 발판 (33) 상에 설치된 한 쌍의 지지 부재 (32) 를 통해 수평으로 지지되는 경통 정반 (31) 을 포함하고 있다. 도 1 및 도 3 으로부터 알 수 있는 바와 같이, 한 쌍의 기판 스테이지 발판 (33) 은, 각각 Y축 방향을 길이 방향으로 하는 부재로 이루어지고, X축 방향으로 소정의 간격으로 배치된다. 각 기판 스테이지 발판 (33) 은, 플로어 면 (F) 상에 설치된 방진 기구 (34) 에 의해 지지되는, 길이 방향에서 양단부를 가지며, 플로어 면 (F) 으로부터 진동 측면에서 분리되어 있다.
도 1 에 나타낸 바와 같이, 기판 스테이지 (PST) 는, 플로어 면 (F) 상에 배치된 복수 (본 실시형태에서는, 예컨대 3개) 의 베이스 프레임 (14A, 14B 및 14C) 이 구비된 한 쌍의 기판 스테이지 발판 (33) 상에 가설된 한 쌍의 정반 (12A 및 12B), 3개의 베이스 프레임 (14A 내지 14C) 위에서 X축 방향으로 구동되는 X조동 스테이지 (23X), X조동 스테이지 (23X) 상에서 Y축 방향으로 구동되어 X조동 스테이지 (23X) 와 함께 XY 2차원 스테이지 디바이스를 구성하는 Y조동 스테이지 (23Y), Y조동 스테이지 (23Y) 의 +Z측 (위쪽) 상에 배치된 미동 스테이지 (21), 및 미동 스테이지 (21) 에 연동하여 XY평면 내에서 이동하는 자중 소거 디바이스 (40) 를 구비하고 있다.
베이스 프레임 (14A 내지 14C) 은 Y축 방향으로 소정의 간격으로 배치된다. 도 4 에 나타낸 바와 같이, 베이스 프레임 (14A 내지 14C) 의 각각은, X축 방향으로 연장하여 설치된 스트링거-형 (stringer-like) 의 부재인 가이드부 (15), 및 가이드부 (15) 의 양단부를 플로어 면 (F) 상에서 지지하는 한 쌍의 다리부 (16) 를 구비하고 있다. 각 가이드부 (15) 는, Z축 방향으로 길게 늘어진 직사각형의 YZ단면을 갖는다. 베이스 프레임 (14A 내지 14C) 및 기판 스테이지 발판 (33) (도 1 참조) 은 기계적으로 비접속 (비접촉) 으로 되어 있다. 또한, 본 실시형태에서는, 가이드부 (15) 의 양단부가 한 쌍의 다리부 (16) 에 의해 지지되지만, 가이드부 (15) 의 길이 방향에서의 중간 부분 (복수의 위치일 수도 있음) 이 유사한 다리부에 의해 지지될 수도 있다.
한 쌍의 정반 (12A 및 12B) 은, 한 쌍의 기판 스테이지 발판 (33) 의 상면에 고정된다. 정반 (12A 및 12B) 의 각각은, 예를 들어 석재에 의해 형성된 X축 방향을 길이 방향으로 하는, 평면도로 직사각형의 판형 부재이며, Y축 방향으로 소정의 간격으로 배치된다. 정반 (12A) 은, 베이스 프레임 (14A) 과 베이스 프레임 (14B) 사이에 배치되고, 정반 (12B) 은, 베이스 프레임 (14B) 와 베이스 프레임 (14C) 사이에 배치된다. 정반 (12A 및 12B) 의 각각의 상면은, 매우 높은 평탄도를 갖도록 완성된다.
도 4 에 나타낸 바와 같이, X조동 스테이지 (23X) 는, Y축 방향을 길이 방향으로 하여, X축 방향으로 소정의 간격으로 배치된 한 쌍의 스트링거-형 부재인 Y빔 부재 (25), 및 한 쌍의 Y빔 부재 (25) 의 길이 방향의 양단부를 각각 접속하는 한 쌍의 접속 부재 (26) 를 구비하고 있고, 평면도로 직사각형 프레임 형상을 갖도록 형성된다. Y빔 부재 (25) 의 하면들 및 접속 부재 (26) 의 하면들은, 동일 평면상에 배치되어 있지만, 접속 부재 (26) 의 상면은, Y빔 부재 (25) 의 상면보다 낮은 (-Z측 상의) 위치에 배치된다 (도 2 참조).
도 2 에 나타낸 바와 같이, 한 쌍의 접속 부재 (26) 의 (-Y측 상의) 일방은, 베이스 프레임 (14A) 에 의해 지지되고, (+Y측 상의) 타방은, 베이스 프레임 (14C) 에 의해 지지된다. 한 쌍의 접속 부재 (26) 의 각각의 하면에는, U자-형의 단면 형상을 갖도록 형성된 X가동자 (29) 가 고정되어 있다. -Y측 상의 접속 부재 (26) 에 고정된 X가동자 (29) 의 한 쌍의 대향하는 대향면들 사이에는, 베이스 프레임 (14A) 의 가이드부 (15) (도 4 참조) 가 삽입된다. 그리고, +Y측의 접속 부재 (26) 에 고정된 X가동자 (29) 의 한 쌍의 대향하는 대향면들 사이에는, 베이스 프레임 (14C) 의 가이드부 (15) (도 4 참조) 가 삽입된다. 각 X가동자 (29) 는, 한 쌍의 대향면들에 복수의 코일들을 포함하는 코일 유닛 (29a) 을 구비하고 있다. 한편, 각 가이드부 (15) 의 양측면에는, X축 방향으로 소정의 간격으로 배열된 복수의 영구자석들을 포함하는 자석 유닛 (15a) 이 고정되어 있다 (도 4 에서는 도시 생략). 자석 유닛 (15a) 은, X가동자 (29) 의 코일 유닛 (29a) 와 함께, X조동 스테이지 (23X) 를 X축 방향으로 구동하는 로렌츠 힘 구동 방식에 의한 X 리니어 모터를 구성하고 있다. 또한, 각 가이드부 (15) 의 양측면 및 상면의 각각은, X축 방향으로 연장하여 설치된 X 가이드 (15b) 가 고정되어 있다 (도 4 에서는 도시 생략). 한편, 각 X가동자 (29) 에는, 복수의 베어링 (미도시) 을 포함하는, 각각이 역 U자-형 단면 형상을 가지며, 각각이 슬라이드 가능한 상태로 각 X 가이드 (15b) 와 기계적으로 계합하는 복수의 슬라이드부 (29b) 가 배치되어 있다.
한 쌍의 Y빔 부재 (25) 의 각각의, 길이 방향으로의 중앙부의 하면에는, 베이스 프레임 (14B) 에 고정된 X 가이드 (17) 에 슬라이드 가능한 상태로 기계적으로 계합하는 U자-형의 단면 형상을 갖는 부재를 그 하단부에 갖는 슬라이드부 (27) 가 고정되어 있다. 한 쌍의 Y빔 부재 (25) 의 각각의 상면에는, Y축 방향으로 연장하여 설치된 Y 가이드 (28) 가 고정되어 있다.
Y조동 스테이지 (23Y) 는, 평면도로 대략 정사각형을 갖는 판형 (또는 상형) 부재로 이루어지고, 도 2 에 나타낸 바와 같이, 중앙부에 Z축 방향으로 관통하는 개구부 (23Ya) 를 갖는다. Y조동 스테이지 (23Y) 의 하면의 4개의 코너부에는, 복수의 베어링 (미도시) 을 포함하고 전술의 Y빔 부재 (25) 상에 고정된 Y 가이드 (28) 에 대해 슬라이드 가능한 상태로 기계적으로 계합한 역 U자-형의 단면 형상을 갖는 슬라이드부 (30) 가 고정되어 있다 (도 4 참조). 또한, 도면에서는 생략되어 있지만, 각 Y빔 부재 (25) 의 상면에는, 예를 들어 복수의 자석들을 포함하는 자석 유닛이 Y 가이드 (28) 에 평행하게 연장하여 설치되고, Y조동 스테이지 (23Y) 의 하면에는, 복수의 코일들을 포함하는 코일 유닛이 배치되어 있다. 각 Y빔 부재 (25) 상의 자석 유닛, 및 이 자석 유닛에 대응하는 Y조동 스테이지 (23Y) 의 코일 유닛은, Y조동 스테이지 (23Y) 를 Y축 방향으로 구동하는 로렌츠 힘 구동 방식에 의해 Y 리니어 모터를 구성한다. 또한, X조동 스테이지 및 Y조동 스테이지의 구동 방식 (액추에이터) 은, 리니어 모터에 한정되지 않고, 예를 들어 볼 스크류 구동 또는 벨트 구동일 수도 있다.
도 2 에 나타낸 바와 같이, Y조동 스테이지 (23Y) 의 표면의 +Y측의 단부에는, X축 방향으로 소정의 간격으로 (도 2 에서 도면의 깊이 방향으로 중첩되어) 배치된 복수, 예컨대 3개의 Y고정자 (53Y) 가 Z축 방향으로 연장하여 설치된 원통형의 지지 부재 (56a) 를 통해 고정되어 있다. 또한, 도 3 에 나타낸 바와 같이, Y조동 스테이지 (23Y) 의 상면의 +X측의 단부에는, Y축 방향으로 소정의 간격으로 (도 3 에서 도면의 깊이 방향으로 중첩되어) 배치된 복수, 예를 들어 3개의 X고정자 (53X) 가 Z축 방향으로 연장하여 설치된 원통형의 지지 부재 (56a) 를 통해 고정되어 있다. Y고정자 (53Y) 및 X고정자 (53X) 는 각각 복수의 코일들을 포함하는 코일 유닛 (도시 생략) 을 갖는다.
또한, 도 2 및 도 3 에 나타낸 바와 같이, Y조동 스테이지 (23Y) 의 상면 상의 4개의 코너부에는, Z고정자 (53Z) 가 지지 부재 (56b) 를 통해 고정되어 있다. 또한, 도면의 복잡함을 피하기 위해, 4개의 Z고정자 (53Z) 중에서, 도 2 에서는 -Y측 및 +X측 상의 Z고정자 (53Z) 만이 나타나 있고, 도 3 에서는 -X측 및 -Y측 상의 Z고정자 (53Z) 만이 나타나 있고, 그 외의 2개의 Z고정자들에 대한 도시는 생략되어 있다. Z고정자들 (53Z) 은 각각 복수의 코일들을 포함하는 코일 유닛 (도시 생략) 을 갖는다.
미동 스테이지 (21) 는, 평면도로 대략 정사각형을 갖는 판형 (또는 박스형) 부재로 이루어지고, 그 상면에 기판 홀더 (PH) 를 통해 기판 (P) 을 유지한다. 기판 홀더 (PH) 는, 예를 들어 도시되지 않은 진공 흡착 기구 (또는 정전 흡착 기구) 가 적어도 일부를 가지고 있으며, 그 상면에서의 흡착에 의해 기판 (P) 을 유지한다.
또한, 도 2 및 도 3 에 나타낸 바와 같이, 미동 스테이지 (21) 의 -Y측 상의 측면 및 -X측 상의 측면에는, 고정 부재 (24Y 및 24X) 를 통해, 가동 거울 (바 미러) (22Y 및 22X) 이 각각 고정되어 있다. 가동 거울 (22X) 의 -X측의 면, 및 가동 거울 (22Y) 의 -Y측의 면은, 각각 경면 가공되어 반사면으로 기능한다. 미동 스테이지 (21) 의 XY평면 내에서의 위치 정보는, 가동 거울 (22X 및 22Y) 을 측정 빔으로 조사하는 레이저 간섭계 시스템 (92) (도 1 참조) 에 의해, 예를 들어 0.5 내지 1nm 정도의 해상도로 상시 검출된다. 또한, 실제로는, 레이저 간섭계 시스템 (92) 은, X가동 거울 (22X) 및 Y가동 거울 (22Y) 각각에 대응하는 X레이저 간섭계 및 Y레이저 간섭계를 구비하고 있지만, 도 1 에서는, 대표적으로 Y레이저 간섭계만이 도시되어 있다.
또한, 도 2 에 나타낸 바와 같이, 미동 스테이지 (21) 의 +Y측 상의 측면에는, X축 방향으로 소정의 간격으로 배치된 복수, 예를 들어 3개의 U자-형 단면 형상을 각각 갖는 Y가동자 (51Y) 가 고정되어 있다. 또한, 도 3 에 나타낸 바와 같이, 미동 스테이지 (21) 의 +X측 상의 측면에는, Y축 방향으로 소정의 간격으로 배치된 복수, 예를 들어 3개의 U자-형 단면 형상을 각각 갖는 X가동자 (51X) 가 고정되어 있다. Y가동자 (51Y) 및 X가동자 (51X) 는, 서로에 대향하는 한 쌍의 대향면들에 복수의 자석들을 포함하는 자석 유닛 (도시 생략) 을 갖는다. 3개의 Y가동자 (51Y) 는, 3개의 Y고정자 (53Y) 와 함께 3개의 로렌츠 힘 구동 방식에 의한 Y축 보이스 코일 모터 (55Y) (이하, Y축 VCM (55Y) 으로 약칭) 를 각각 구성하고, 3개의 X가동자 (51X) 는, 3개의 X고정자 (53X) 와 함께 3개의 로렌츠 힘 구동 방식에 의한 X축 보이스 코일 모터 (55X) (이하, X축 VCM (55X) 으로 약칭) 를 구성하고 있다. 도시되지 않은 주 제어기는, 예를 들어, 3개의 X축 VCM (55X) (또는 3개의 Y축 VCM (55Y)) 중으로부터의 양단부 상에서, X축 VCM (55X) (또는 Y축 VCM (55Y)) 에 의해 생성되는 구동력 (추진력) 을 다르게 함으로써, 미동 스테이지 (21) 를 θz 방향으로 구동한다.
또한, 미동 스테이지 (21) 의 하면 상의 4개의 코너부에는, 역 U자-형 형상을 갖는 Z가동자 (51Z) 가 고정되어 있다. 또한, 도면의 복잡함을 피하기 위해, 4개의 Z가동자 (51Z) 중에서, 도 2 에서는 -Y측 및 +X측 상의 Z가동자 (51Z) 만이 나타나 있고, 도 3 에서는 -X측 및 -Y측 상의 Z가동자 (51Z) 만이 나타나 있으며, 그 외의 2개의 Z가동자에 대한 도시는 생략되어 있다. 또한, 도 2 및 도 3 에서는, 도시의 편의상, Z가동자들 (51Z) 은, 고정 부재 (24X 및 24Y) 에 접속되어 있지만, 실제로는, 미동 스테이지 (21) 의 하면에 고정되어 있다. Z가동자 (51Z) 는, 서로에 대향하는 한 쌍의 대향면들에 복수의 자석들을 포함하는 자석 유닛 (도시 생략) 을 구비하고 있다. 4개의 Z가동자 (51Z) 은, 4개의 Z고정자 (53Z) 와 함께 4개의 로렌츠 힘 구동 방식에 의한 Z축 보이스 코일 모터 (55Z) (이하, Z축 VCM (55Z) 으로 약칭) 를 구성하고 있다. 도시되지 않는 주 제어기는, 4개의 Z축 VCM (55Z) 각각의 추진력이 동일하게 되도록 제어함으로써, 미동 스테이지 (21) 를 Z축 방향으로 구동한다 (수직 이동시킨다). 또한, 주 제어기는, 각 Z축 VCM (55Z) 의 추진력이 다르도록 제어함으로써, 미동 스테이지 (21) 를 θx 방향 및 θy 방향으로 구동한다. 또한, 본 실시형태에서는, Z축 VCM 이 미동 스테이지의 4개의 코너부에 대응하게 배치되었지만, 이에 한정되지 않고, Z축 VCM (55Z) 은, 적어도 동일 직선상에 없는 3개의 점으로부터 Z축 방향으로 추진력을 생성할 수도 있다.
전술한 바와 같은 구성에 따르면, 기판 스테이지 (PST) 는, 기판 (P) 을 2개의 축 (즉, X축 및 Y축) 에서 긴 스트로크로 구동 (조동) 할 수 있으며, 또한 6 자유도의 방향 (X, Y 및 Z축 방향과 θx, θy 및 θz 방향) 으로 미소 스트로크로 구동 (미동) 할 수 있다. 또한, 본 실시형태에서의 X축 VCM, Y축 VCM 및 Z축 VCM 의 각각은, 가동자가 자석 유닛을 갖는 가동 자석 방식의 보이스 코일 모터이지만, 이에 한정되지 않고, 가동자가 코일 유닛을 갖는 가동 코일 방식에 의한 보이스 코일 모터일 수 있다. 또한, 구동 방식이 로렌츠 힘 구동 방식 이외의 구동 방식일 수 있다. 유사하게, 노광 장치 (10) 가 구비된 리니어 모터들의 각각은, 가동 자석 방식 또는 가동 코일 방식 중 어느 일방에 기초할 수 있고, 리니어 모터들의 각각의 구동 방식은 로렌츠 힘 구동 방식에 한정되지 않고, 가변 자기저항 (variable magnetoresistance) 방식과 같은 다른 구동 방식일 수 있다.
자중 소거 디바이스 (40) 은, 미동 스테이지 (21) (구체적으로는 미동 스테이지 (21), 기판 홀더 (PH), 가동 거울 (22X 및 22Y), 고정 부재 (24X 및 24Y) 등) 로 이루어지는 계의 자중을 지지하는 부재이며, 도 2 에 나타낸 바와 같이, 미동 스테이지 (21) 와 연동하여 이동하는 디바이스 본체 (60), 및 디바이스 본체 (60) 를 정반 (12A 및 12B) 위에서 지지하고 디바이스 본체 (60) 에 추종하여 이동하는 추종 지지 디바이스 (70) 를 구비하고 있다.
디바이스 본체 (60) 는, Z축 방향으로 연장하여 설치된 원통형의 부재로 이루어지며, Y조동 스테이지 (23Y) 에 형성된 관통홀 (23Ya) 내에 삽입된다. 디바이스 본체 (60) 는, 하우징 (61), 공기 스프링 (62), 및 슬라이드부 (63) 를 포함한다. 디바이스 본체 (60) 는, 중심 기둥으로도 지칭된다.
하우징 (61) 은, 바닥부를 갖는 실린더-형 부재로 이루어진다. 하우징 (61) 의 둘레의 벽면의 상단 부외 측에는, 도 2 에 나타낸 바와 같이 +Y방향과 -Y방향으로 각각 연장되는 한 쌍의 Y아암-형 부재 (64Y), 및 도 3 에 나타낸 바와 같이 +X방향과 -X방향 각각 연장되는 한 쌍의 X아암-형 부재 (64X) (이하, 4개의 아암-형 부재는 아암-형 부재 (64) 로 약칭) 가 고정되어 있다. 4개의 아암-형 부재 (64) 의 각각의 선단부에는 프로브부 (65) 가 배치된다. 한편, 미동 스테이지 (21) 의 하면에는, 타겟부 (66) 가 프로브부 (65) 의 각각에 대응하도록 배치된다. 본 실시형태에서는, 프로브부 (65) 와 타겟부 (66) 를 포함하고, 프로브부 (65) 와 타겟부 (66) 과의 사이의 거리, 즉 미동 스테이지 (21) 의 Z위치를 계측하는 것이 가능한 정전 용량 센서 (이하, Z센서로 지칭) 가 구성되어 있다. Z센서의 출력은, 도시되지 않은 주 제어기에 공급된다. 주 제어기는, 4개의 Z센서들의 계측 결과들을 이용하여, 미동 스테이지 (21) 의 Z축 방향의 위치, 및 미동 스테이지 (21) 의 θx 방향과 θy 방향 각각에서의 경사량을 제어한다. 또한, Z센서들의 수는, 적어도 동일 직선상에 없는 3개의 위치들에서 미동 스테이지 (21) 의 Z위치가 계측될 수 있는 동안에는, 4개로 한정되지 않고, 예를 들어 3개일 수 있다. 또한, Z센서는 정전 용량 센서에 한정되지 않고, CCD 방식 등의 레이저 변위계일 수 있다. 또한, Z센서들을 구성하는 프로브부들과 타겟부들 사이의 위치 관계는 전술한 위치 관계와 반대일 수 있다.
도 2 에 나타낸 바와 같이, 하우징 (61) 은 하우징 (61) 의 +Y측 및 -Y측 각각에 배치된 한 쌍의 만곡부 (67) 에 의해 Y조동 스테이지 (23Y) 에 접속된다. 만곡부 (67) 는, 볼 조인트를 통해 일단이 하우징 (61) 에 접속되고 타단이 Y조동 스테이지 (23Y) 에 접속되는, 예를 들어 강철 (steel) 에 의해 형성된 얇은 판을 구비하고 있다. 따라서, 전술한 Y 리니어 모터 (도시 생략) 에 의해 Y조동 스테이지 (23Y) 가 X조동 스테이지 (23X) 상에서 Y축 방향으로 구동되면, 하우징 (61) 은 얇은 판에 작용하는 장력으로 인해 Y조동 스테이지 (23Y) 에 의해 견인되고, Y조동 스테이지 (23Y) 와 일체로 Y축 방향 (+Y방향 및 -Y방향) 으로 이동한다. 다만, 하우징 (61) 의 Z축 방향과 θx, θy 및 θz 방향으로의 위치는, 볼 조인트의 활절 (hinged joint) 의 작용으로 인해, Y조동 스테이지 (23Y) 에 의해 구속되지 않는다. 또한, 만곡부 (67) 는, 디바이스 본체 (60) 의 Z축 방향으로의 무게 중심 위치를 포함하는 평면 내에서, 디바이스 본체 (60) 및 Y조동 스테이지 (23Y) 를 접속하고 있다. 따라서, 디바이스 본체 (60) 를 Y축 방향으로 구동할 때에, 디바이스 본체 (60) 에 θx 방향 (X축 주위) 의 모멘트가 작용하는 것을 억제할 수 있고, 디바이스 본체 (60) 가 안정적으로 Y축 방향으로 구동될 수 있다. 또한, 엄밀하게 말하면, 후술하는 슬라이드부 (68 및 76) 사이의 운동마찰력이 강하면, 그 운동마찰력을 고려하여 만곡부들의 위치를 무게 중심 면으로부터 하부로 시프트될 수도 있다. 그러나, Y축 방향의 이동에 대해서는, 한 쌍의 베이스 패드 (X축 방향으로의 범위에 비해 Y축 방향으로의 범위가 더 넓게 걸쳐있음) 를 이용하여 모멘트를 받을 수 있으므로, 마찰력의 영향이 존재하더라도 비교적 안정적으로 구동될 수 있다.
공기 스프링 (62) 은, 하우징 (61) 내의 최하부에 하우징된다. 공기 스프링 (62) 에는, 도시되지 않은 기체 공급 디바이스로부터 기체 (예컨대, 공기) 가 공급되고, 이에 의해, 공기 스프링 (62) 의 내부가 그 외부에 비해 기압이 더 높은 포지티브 압력 공간으로 설정된다. 디바이스 본체 (60) 는, 미동 스테이지 (21) 를 지지한 상태에서는, 미동 스테이지 (21) 의 자중을 흡수 (소거) 하는 공기 스프링 (62) 에 의해, Z축 VCM (55Z) 에의 부하를 경감한다. 또한, 공기 스프링 (62) 은, 그 내압의 변화에 의해 미동 스테이지 (21) (즉, 기판 (P)) 를 Z축 방향으로 긴 스트로크로 구동하는 Z축 에어 액추에이터로서도 기능한다. 공기 스프링 (62) 대신에, 미동 스테이지 (21) 를 지지한 상태에서 미동 스테이지 (21) 의 자중을 흡수 (소거) 할 수 있는 것과 동시에, 미동 스테이지 (21) 를 Z축 방향으로 구동할 수 있는 액추에이터 (예컨대, 완충기가 이에 대응함) 로서도 기능하는 댐퍼 (damper) 가 이용될 수 있다. 이 경우, 벨로즈식 또는 유압식과 같은 다른 방식에 의한 스프링이 이용될 수 있다.
슬라이드부 (63) 는, 하우징 (61) 의 내부에 하우징된 실린더-형 부재이다. 하우징 (61) 의 주위 벽의 내측에는, 도시되지 않은 복수의 에어 패드가 장착되고, 슬라이드부 (63) 가 Z축 방향으로 이동할 때에 이용되는 가이드를 형성한다. 슬라이드부 (63) 의 상면에는, 도시되지 않은 복수의 에어 패드가 배치되고 레벨링 장치 (57) 를 부상 지지하고 있다.
레벨링 장치 (57) 는, 베어링부 (58) 및 볼 (59) 을 포함한다. 베어링부 (58) 는 XY평면에 평행하게 배치된 테이블 형상의 부재로 이루어지고, 그 하면이 슬라이드부 (63) 의 상면에 배치된 에어 패드들 (도시 생략) 에 대향하고 있다. 베어링부 (58) 의 상면에는, 반구 형상을 갖는 오목부가 형성되고, 그 오목부에는 볼 (59) 의 하부가 슬라이드 가능하게 감합되어 있다. 또한, 미동 스테이지 (21) 의 하면 중앙에도, 유사하게 반구 형상의 오목부가 형성되고, 그 오목부에는 볼 (59) 의 상부가 슬라이드 가능하게 감합되어 있다. 또한, 볼 (59) 은, 미동 스테이지 (21) 에 고정될 수 있다. 따라서, 미동 스테이지 (21) 는, 슬라이드부 (63) 에 대해, 경사 방향 (θx 방향 및 θy 방향) 으로 자유롭게 이동 (요동) 할 수 있다. 또한, 본 실시형태에서의 디바이스 본체 (60) (만곡부 (67) 를 포함함) 는, 예를 들어 국제공개 제2008/129762호 (대응 미국 특허출원 공개 제2010/0018950호) 등에 개시된 자중 소거 기구와 유사하게 구성된다. 또한, 전술한 레벨링 장치 (57) 대신에, 상기 국제공개 제2008/129762호에 개시되는, 삼각뿔 형상의 부재를 복수 (예컨대, 3개) 의 에어 패드로 지지하는 것에 의해 미동 스테이지의 경사를 허용하는 기구가 이용될 수도 있다.
도 2 에 나타낸 바와 같이, 추종 지지 디바이스 (70) 는, Y축 방향 (즉 스텝 방향) 을 길이 방향으로 하여 테이블 형상으로 형성되고, 디바이스 본체 (60) 를 하부로부터 지지하는 스텝 보드 (71), 스텝 보드 (71) 를 하부로부터 지지하는 한 쌍의 베이스 패드 (72A 및 72B), 및 한 쌍의 베이스 패드 (72A 및 72B) 사이에 배치된 무게 중심 구동 디바이스 (73) 를 포함한다.
도 4 에 나타낸 바와 같이, 스텝 보드 (71) 는, X조동 스테이지 (23X) 의 한 쌍의 Y빔 부재 (25) 및 한 쌍의 접속 부재 (26) 에 의해 형성되는 직사각형의 개구부 내에 배치된다. 스텝 보드 (71) 의 길이 방향의 크기는, 한 쌍의 접속 부재 (26) 사이의 거리보다 짧게 설정 (예컨대, 그 거리의 3/4 정도의 길이로 설정) 된다. 또한, 도 2 에 나타낸 바와 같이, 스텝 보드 (71) 는, 베이스 패드 (72A 및 72B) 를 통해, 정반 (12A 및 12B) 에 걸쳐서 배치된다.
도 4 에 나타낸 바와 같이, 스텝 보드 (71) 의 상면의 Y축 방향의 양단부에는, 각각 스토퍼 (74) 가 고정된다. 각 스토퍼 (74) 는, X축 방향으로 소정의 간격으로 배치된 한 쌍의 볼록부로 이루어지고, 그 한 쌍의 볼록부 사이에는, Y축 방향을 따라 뻗어있는 가이드 로프 (75) 가 미소한 틈새를 통해 삽입된다 (도 3 참조). 가이드 로프 (75) 는, 한 쌍의 접속 부재 (26) 의 상면들 사이에서 뻗어있다. 따라서, 스텝 보드 (71) 의 Z축 주위 (θz 방향) 에서의 회전이 억제된다. 가이드 로프 (75) 는, 예를 들어 와이어 로프 등에 의해 형성된다.
스텝 보드 (71) 의 상면에는, 가이드 로프 (75) 를 사이에 두어 +X측 및 -X측 상에, 한 쌍의 Y 가이드 (76) 가 Y축 방향으로 연장하여 설치된다. 도 3 및 도 4 에 나타낸 바와 같이, 디바이스 본체 (60) 는, 하우징 (61) 의 하면 상의 4개의 코너부에 한 쌍의 Y 가이드 (76) 에 대해 슬라이드 가능한 상태로 기계적으로 계합하는 복수 (본 실시형태에서는 4개) 의 역 U자-형 형상의 슬라이드부 (68) 를 각각 가지며, 스텝 보드 (71) 상에서 Y축 방향으로 자유롭게 상대 이동하고 X축 방향에는 스텝 보드 (71) 와 일체로 이동한다. 또한, 도 3 에 나타낸 바와 같이, 스텝 보드 (71) 의 하면에는 한 쌍의 Y 가이드 (76) 에 각각 대향하도록 한 쌍의 Y 가이드 (77) 가 Y축 방향으로 연장하여 설치된다. 게다가, 스텝 보드 (71) 의 하면의 중앙부에는, 도시되지 않는 복수의 영구자석을 포함하는 자석 유닛 (78) 이 Y축 방향으로 연장하여 설치된다.
도 4 에 나타낸 바와 같이, 스텝 보드 (71) 의 +X측 및 -X측의 측면에는, X축 방향에 평행한 축 주위에서 자유 회전가능한 한 쌍의 풀리 (79a 및 79b) 가 장착된다. 예를 들어 와이어 로프 등에 의해 형성된 구동 로프 (80a 및 80b) 를 한 쌍의 풀리 (79a 및 79b) 각각에 감을 수 있다. 도 2 에 나타낸 바와 같이, +Y측 상의 풀리 (79a) 에 감을 수 있었던 구동 로프 (80a) 의 일단은 X조동 스테이지 (23X) 의 +Y측의 접속 부재 (26) 에 고정되고, 타단은 Y조동 스테이지 (23Y) 의 하면의 +Y측의 단부에 고정된 지지 부재 (81a) 를 통해 Y조동 스테이지 (23Y) 에 고정된다. 한편, -Y측의 풀리 (79b) 에 감을 수 있었던 구동 로프 (80b) 의 일단은 X조동 스테이지 (23X) 의 -Y측의 접속 부재 (26) 에 고정되고, 타단은 Y조동 스테이지 (23Y) 의 하면의 -Y측의 단부에 고정된 지지 부재 (81b) 를 통해 Y조동 스테이지 (23Y) 에 고정된다. 구동 로프로서는, 유연성을 갖고 장력으로 인한 그 길이 방향으로의 변화가 적은 것이 바람직하지만, 그 형상은 로프에 한정되지 않고, 예를 들어 벨트 형상으로 형성될 수 있다.
따라서, 전술한 Y 리니어 모터 (도시 생략) 에 의해 Y조동 스테이지 (23Y) 가 X조동 스테이지 (23X) 상에서 Y축 방향으로 구동되는 경우, 스텝 보드 (71) 는 구동 로프 (80a) 또는 구동 로프 (80b) 에 작용하는 장력으로 인해 Y조동 스테이지 (23Y) 에 의해 견인되고, Y조동 스테이지 (23Y) 에 추종하여 Y축 방향으로 이동한다. 다만, 풀리 (79a 및 79b) 가 움직 도르래로서 기능하기 때문에, 스텝 보드 (71) 의 Y축 방향으로의 이동 거리는, Y조동 스테이지 (23Y) 의 Y축 방향으로의 이동 거리의 반 (1/2) 이 되고, 구동 속도도 Y조동 스테이지 (23Y) 의 구동 속도의 반이 된다. 또한, 스텝 보드가 Y조동 스테이지에 추종하도록 절반 정도의 속도로 구동될 수 있다면, 스텝 보드를 구동하는 기구는, 전술한 것에 한정되지 않고, 예를 들어 리니어 모터 등의 액추에이터, 혹은 피드 스크류 등을 포함하는 기구 등도 이용될 수 있다.
도 2 에 나타낸 바와 같이, 한 쌍의 베이스 패드 (72A 및 72B) 각각은, 베이스 패드 (72A) 가 정반 (12A) 상에 배치되고 베이스 패드 (72B) 가 정반 (12B) 상에 배치된다는 점을 제외하고는, 실질적으로 동일한 부재들이다. 한 세트의 베이스 패드 (72A 및 72B) 는, 각각 예를 들어 평면도로 팔각형의 테이블 형상 (도 5 참조) 으로 형성된 베이스부 (82), 및 베이스부 (82) 의 하면에 볼 조인트 (83) 를 통해 접속된 복수, 예를 들어 3개의 에어 패드 (84) 를 구비하고 있다. 에어 패드 (84) 는, 정반 (12A) (또는 12B) 의 상면에 대해 가압 기체를 분출함으로써, 에어 패드 (84) 와 정반 (12A) (또는 12B) 의 상면 사이에, 예를 들어 수 ㎛ 정도의 간극을 형성한다. 보다 구체적으로, 에어 패드 (84) 는 기체의 정압 (static pressure) 에 의해 베이스부 (82) 로 하여금 정반 (12A) (또는 12B) 위에서 부상하게 하는 기체 정압 베어링으로서 기능한다. 또한, 에어 패드 (84) 의 수는, 3 에 한정되지 않고, 예를 들어 X축 방향으로 이간하고 있으면, 2 이어도 된다. 본 실시형태에서는, 한 세트의 베이스 패드 (72A 및 72B) 가 Y축 방향으로 이간하여 배치되므로, 2개의 에어 패드로도 스텝 보드 (71) 를 안정적으로 지지될 수 있다. 베이스 패드 (72A 및 72B) 는, 예를 들어 노광 장치의 요구 사양들에 따라 정반 (12A) (또는 정반 (12B)) 에 대해 접촉해도 되지만, 본 실시형태의 노광 장치 (10) 는 대형의 플랫 패널 디스플레이를 제조하는 장치이기 때문에, 마찰력으로 인해 정반 (12A) (또는 12B) 의 상면에 손상이 생기지 않도록, 일례로서, 에어 패드 (84) 를 이용하여 정반에 대해 비접촉식인 구성을 채용하고 있다.
도 5 에 나타낸 바와 같이, 베이스부 (82) 의 상면에는, 스텝 보드 (71) 의 하면에 고정된 한 쌍의 Y 가이드 (77) 에 대해 슬라이드 가능한 상태로 기계적으로 계합하는 복수, 예컨대 4개의 U자-형 단면 형상의 슬라이드부 (85) 가 고정된다. 따라서, 자중 소거 디바이스 (40) (즉 디바이스 본체 (60), 스텝 보드 (71) 및 한 세트의 베이스 패드 (72A 및 72B) 로 구성되는 계) 는, X축 방향으로, 일체로 이동하도록 구성된다.
또한, 도 5 에 나타낸 바와 같이, 한 쌍의 베이스 패드 (72A 및 72B) 의 각각의 베이스부 (82) 의 상면에는, 복수의 코일 (도시 생략) 을 포함하는 코일 유닛 (86) 이 각각 하나씩 배치된다. 각 코일 유닛 (86) 은, 스텝 보드 (71) 에 배치된 자석 유닛 (78) (도 3 참조) 과 함께, 베이스 패드 (72A 및 72B) 를 스텝 보드 (71) 에 대해 Y축 방향으로 구동하는 Y 리니어 모터를 구성하고 있다. 베이스 패드들 중 일방인 베이스 패드 (72A) 의 코일 유닛 (86) 의 코일, 및 베이스 패드들 중 타방인 베이스 패드 (72B) 의 코일 유닛 (86) 의 코일에 공급되는 전류는, 도시되지 않은 주 제어기에 의해 독립적으로 제어된다. 따라서, 한 쌍의 베이스 패드 (72A 및 72B) 각각은, 서로 독립적으로 스텝 보드 (71) 에 대한 지지 위치를 변경하는 것이 가능하게 된다.
도 3 에 나타낸 바와 같이, 무게 중심 구동 디바이스 (73) 는, U자-형 단면 형상의 부재인 슬라이드부 (87), 및 슬라이드부 (87) 의 서로 대향하는 대향면의 선단 (상단) 에, 볼 조인트 (88) 를 통해 접속된 한 쌍의 에어 패드 (89) 를 구비하고 있다.
슬라이드부 (87) 에는, 복수의 코일을 포함하는 코일 유닛 (90) 이 스텝 보드 (71) 의 하면에 고정된 자석 유닛 (78) 에 대향하도록 배치된다. 코일 유닛 (90) 은, 자석 유닛 (78) 과 함께, 무게 중심 구동 디바이스 (73) 를 스텝 보드 (71) 에 대해 Y축 방향으로 구동하는 Y 리니어 모터를 구성하고 있다. 코일 유닛 (90) 의 코일에 공급되는 전류는, 도시되지 않은 주 제어기에 의해 제어된다.
코일 유닛 (90) 의 +X측 및 -X측에는, 스텝 보드 (71) 의 하면에 배치된 Y 가이드 (77) 에 대해 슬라이드 가능한 상태로, 무게 중심 구동 디바이스 (73) 가 자중으로 인해 낙하하지 않도록 기계적으로 계합하는 U자-형 단면 형상의 슬라이드부 (94) 가 고정되어 있다. 따라서, 무게 중심 구동 디바이스 (73) 및 스텝 보드 (71) 는 X축 방향으로 일체로 이동한다.
한 쌍의 에어 패드 (89) 의 각각은, 한 쌍의 Y빔 부재 (25) 의 각각의 내측 면에 고정된 패드용 가이드 (25a) 에 가압 기체를 분출함으로써, 에어 패드 (89) 와 Y빔 부재 (25) 의 내측 면 사이에, 예를 들어 수 ㎛ 정도의 간극을 형성한다. 따라서, 무게 중심 구동 디바이스 (73) 는, 한 쌍의 Y빔 부재 (25) 에 대해 비접촉 상태로 배치되고 Y빔 부재 (25) 와는 독립적으로 Y축 방향으로 이동가능한 한편, 에어 패드 (89) 로부터 분출되는 기체의 정압에 의해 Y빔 부재 (25) 와 일체로 X축 방향으로 이동한다.
이 경우, 한 쌍의 에어 패드 (89) 각각의 베어링면 (기체 공급면) 의 Z축 방향에서의 위치는, 자중 소거 디바이스 (40) (즉, 디바이스 본체 (60), 스텝 보드 (71), 및 한 세트의 베이스 패드 (72A 및 72B) 로 구성되는 계) 의 무게 중심 위치 (CG) (도 2 참조) 의 Z축 방향에 관한 위치와 대략 일치한다. 결과적으로, 자중 소거 디바이스 (40) 를 X축 방향 (스캔 방향) 으로 구동할 때에 작동하는 구동력은, 무게 중심 위치 (CG) 를 포함하는 평면 내에서 자중 소거 디바이스 (40) 에 대해 X축 방향으로 작용한다. 따라서, 자중 소거 디바이스 (40) 에 θy 방향 (Y축 주위) 의 모멘트가 작용하지 않고, 이에 의해 안정적으로 자중 소거 디바이스 (40) 를 X축 방향으로 구동 (무게 중심 구동) 할 수 있다.
게다가, 도시되지 않은 주 제어기는, 디바이스 본체 (60) 의 Y축 방향의 위치에 따라 한 세트의 베이스 패드 (72A 및 72B) 및 무게 중심 구동 디바이스 (73) 의 위치를 제어한다. 도 6 의 (A) 내지 (C) 에는, 디바이스 본체 (60) 의 Y축 방향의 위치의 변화에 따라 베이스 패드 (72A 및 72B) 및 무게 중심 구동 디바이스 (73) 가 구동되는 상태가 나타나 있다.
도 6 의 (A) 에서는, Y조동 스테이지 (23Y) 는, Y조동 스테이지 (23Y) 가 X조동 스테이지 (23X) 상에서의 Y축 방향에 관한 이동가능한 범위에서 가장 -Y측에 위치된다. 도 6 의 (A) 에 나타낸 상태에서는, 디바이스 본체 (60) 는, 정반 (12A) 의 -Y측의 단부의 근방의 위쪽에 위치되고, 도시되지 않은 주 제어기는 베이스 패드들 중 일방인, 정반 (12A) 상에 배치된 베이스 패드 (72A) 를 디바이스 본체 (60) 의 하부에 (Z축 방향으로 디바이스 본체 (60) 와 중첩되도록) 위치시킨다. 또한, 주 제어기는, 베이스 패드들 중 타방인, 정반 (12B) 상에 배치된 베이스 패드 (72B) 를 정반 (12B) 의 -Y측의 단부의 근방에 위치시킨다. 스텝 보드 (71) 는, 도 6 의 (A) 에 나타낸 상태에서, -Y측의 단부가 베이스 패드 (72A) 에 의해, +Y측의 단부가 베이스 패드 (72B) 에 의해 각각 지지되도록, Y축 방향의 크기가 설정된다.
다음으로, 예를 들어 노광중에 스텝 동작을 수행할 때와 같은 경우들에서, Y조동 스테이지 (23Y) 가 X조동 스테이지 (23X) 상에서 +Y방향으로 구동되면, 만곡부 (67) 의 판 스프링의 강성으로 인해, 디바이스 본체 (60) 가 Y조동 스테이지 (23Y) 와 연동하여 스텝 보드 (71) 상을 +Y방향으로 이동한다. 스텝 보드 (71) 는, 구동 로프 (80a) 에 의해 견인되고, 디바이스 본체 (60) 에 추종하여 (다만, 이동 스트로크는 반 정도) +Y방향으로 이동한다. 그 후, 주 제어기는, Y조동 스테이지 (23Y) 의 Y축 방향에 관한 이동 거리에 따라 이동 거리에 의해 베이스 패드 (72A) 를 정반 (12A) 상에서 구동한다. 따라서, 디바이스 본체 (60) 가 정반 (12A) 의 위쪽에서 이동하는 동안, 항상, 베이스 패드 (72A) 는 디바이스 본체 (60) 의 바로 아래에 배치된 상태가 유지된다. 이 방식으로, 베이스 패드 (72A) 의 위치가 디바이스 본체 (60) 와 항상 Z축 방향과 중첩하도록 제어되므로, 스텝 보드 (71) 에 편하중으로 인한 휨 응력이 작용하는 것을 억제할 수 있다. 그러므로, 스텝 보드 (71) 가 박형화 및 경량화될 수 있다.
또한, 도 6 의 (B) 에 나타낸 바와 같이, 디바이스 본체 (60) 가 Y조동 스테이지 (23Y) 와 연동하여 +Y방향으로 이동하고, 베이스 프레임 (14B) (정반 (12A) 와 정반 (12B) 와의 사이) 의 위쪽에 위치될 때, 주 제어기는, 베이스 패드 (72A) 를 정반 (12A) 의 +Y측의 단부의 근방에 정지시킨다. 이 도 6 의 (B) 에 나타낸 상태에서는, 한 세트의 베이스 패드 (72A 및 72B) 가 근접해서 배치되므로, 스텝 보드 (71) 의 중앙부에 작용하는 휨 응력을 최소한으로 할 수 있다.
도 6 의 (B) 에 나타낸 상태로부터, 도 6 의 (C) 에 나타낸 바와 같이, Y조동 스테이지 (23Y) 가 또한 +Y방향으로 구동되는 경우, 스텝 보드 (71) 도 디바이스 본체 (60) 에 추종하여 또한 +Y방향으로 이동한다. 또한, 주 제어기는, 디바이스 본체 (60) 가 정반 (12B) 의 위쪽에서 이동하는 동안, Y조동 스테이지 (23Y) 의 Y축 방향에 관한 이동 거리에 따라, 항상, 디바이스 본체 (60) 의 바로 아래에 배치되도록, 베이스 패드 (72B) 를 구동한다. 또한, 도 6 의 (A) 내지 (C) 에 나타낸 경우와는 반대로 Y조동 스테이지 (23Y) 가 -Y방향으로 구동될 때, 전술한 경우와 반대로, 스텝 보드 (71) 가 Y조동 스테이지 (23Y) 의 절반의 이동 거리인 이동 거리만큼 Y조동 스테이지 (23Y) 에 추종하여 -Y방향으로 이동하고, 주 제어기는 베이스 패드 (72A) 또는 베이스 패드 (72B) 가, 항상 디바이스 본체 (60) 의 바로 아래에 배치되도록 제어한다 (도 6 의 (B) 에 나타낸 상태를 제외함).
한편, 예를 들어 노광 동작 (스캔 동작) 을 수행할 때와 같은 경우들에서는, X조동 스테이지 (23X) 가 X 리니어 모터에 의해 X축 방향으로 구동되는 경우, 무게 중심 구동 디바이스 (73) 의 한 세트의 에어 패드 (89) (도 3 참조) 중 어느 일방이, 대향하는 Y빔 가이드 (25) 에 대해 가압된다. 따라서, 서로 기계적으로 접속된 디바이스 본체 (60), 스텝 보드 (71), 및 한 세트의 베이스 패드 (72A 및 72B) 로 구성되는 자중 소거 디바이스 (40) 가 X조동 스테이지 (23X) 와 일체로 X축 방향으로 이동한다.
이 경우, 주 제어기는, 디바이스 본체 (60) 가 Y축 방향으로 이동할 때 (이것은 디바이스 본체 (60) 가 또한 X축 방향으로도 이동할 때의 경우를 포함함), 무게 중심 구동 디바이스 (73) 가 자중 소거 디바이스 (40) 의 무게 중심 위치 (CG) 의 이동에 추종하도록, 무게 중심 구동 디바이스 (73) 의 위치를 제어한다. 도 6 의 (A) 내지 (C) 를 이용하여 보다 구체적으로 설명하면, 예를 들어, 도 6 의 (A) 에 나타낸 상태에서, 무게 중심 위치 (CG) 는, 스텝 보드 (71) 의 Y축 방향의 중심으로부터 약간 -Y측에 위치된다. 주 제어기는, 도 6 의 (A) 에 나타낸 바와 같이, 무게 중심 구동 디바이스 (73) 를 무게 중심 위치 (CG) 에 대응하는 위치에 위치시킨다. 이 상태에서 X조동 스테이지 (23X) 가 X축 방향으로 구동되는 경우, 에어 패드 (89) (도 3 참조) 를 통해, 자중 소거 디바이스 (40) 가 X축 방향으로 무게 중심 구동된다. 또한, 도 6 의 (B) 에 나타낸 바와 같이, 디바이스 본체 (60) 가 스텝 보드의 Y축 방향의 중심 상에 위치되는 상태에서는, 무게 중심 위치 (CG) 는 디바이스 본체 (60) 의 바로 아래에 위치되므로, 주 제어기는 무게 중심 위치 (CG) 의 위치에 따라 무게 중심 구동 디바이스 (73) 를 제어한다.
보다 구체적으로, 도 6 의 (A) 내지 (C) 에 나타낸 바와 같이, 자중 소거 디바이스 (40) 의 무게 중심 위치 (CG) 의 위치는, 디바이스 본체 (60), 스텝 보드 (71), 및 한 세트의 베이스 패드 (72A 및 72B) 사이의 상대적인 위치 관계의 변화로 인해 Y축 방향에서 변화하지만, 주 제어기는 무게 중심 위치 (CG) 의 위치 변화에 따라 무게 중심 구동 디바이스 (73) 의 Y축 방향의 위치를 제어하므로, 항상, 자중 소거 디바이스 (40) 의 무게 중심 위치 (CG) 에 X축 방향의 구동력을 작용시킬 수 있다. 따라서, 디바이스 본체 (60), 스텝 보드 (71), 및 한 세트의 베이스 패드 (72A 및 72B) 사이에서의 상대적인 위치에 상관없이, 자중 소거 디바이스 (40) 에 θz 방향 (Z축 주위) 의 모멘트가 작용하지 않고, 안정적으로 자중 소거 디바이스 (40) 가 X축 방향 (X축 방향 및 Y축 방향으로 동시에 구동되는 경우를 포함함) 으로 무게 중심 구동될 수 있다. 또한, 무게 중심 구동 디바이스 (73) 의 구동 거리를 산출하기 위해, 기판 (P) 이 Y축 방향으로 구동될 때에 필요한 미동 스테이지 (21) 의 구동 거리에 따라 자중 소거 디바이스 (40) 의 무게 중심 위치 (CG) 의 변화량은, 예를 들어 실험 (또는 시뮬레이션) 등에 의해 미리 획득되고, 이 데이터는 테이블 포맷으로 변환 (혹은 수식화) 되어 주 제어기의 도시되지 않은 메모리 디바이스에 기억되는 것이 바람직하다. 주 제어기는, 전술한 테이블을 참조함으로써, 미동 스테이지 (21) 의 위치 또는 이동 거리 (즉, 무게 중심 위치 (CG) 의 변화량) 에 따른 구동 거리를 이용하여 무게 중심 구동 디바이스 (73) 의 위치를 제어할 수 있다.
전술한 바와 같이 구성된 액정 노광 장치 (10) 에서는, 미도시의 주 제어기의 제어 하에서, 미도시의 마스크 로더에 의해 마스크 스테이지 (MST) 상에 마스크 (M) 가 로드되고, 미도시의 기판 로더에 의해 기판 스테이지 (PST) 상에 기판 (P) 이 로드된다. 그 후, 주 제어기는, 미도시의 얼라인먼트 검출계를 이용하여 얼라인먼트 계측을 실행하고, 얼라인먼트 계측 후에 스텝-앤드-스캔 방식에 의한 노광 동작이 수행된다. 이 노광 동작은 종래부터 수행된 스텝-앤드-스캔 방식에 의한 노광 방식과 유사하므로, 이에 대한 설명은 생략하기로 한다.
전술한 바와 같이, 본 실시형태의 액정 노광 장치 (10) 에서는, 2개의 정반 (12A 및 12B) 상에 각각 베이스 패드 (72A 및 72B) 가 배치되고, 베이스 패드 (72A 및 72B) 에 의해 하나의 스텝 보드 (71) 가 지지된다. 디바이스 본체 (60) 는, 스텝 보드 (71) 상에서 이동함으로써, 정반 (12A) 위로부터 정반 (12B) 위로 (또는 그 반대로) 이동하므로, 분리하여 배치된 인접하는 정반 (12A) 와 정반 (12B) 사이의 경계부는, 자중 소거 디바이스 (40) 가 Y축 방향으로 이동할 때에 이용되는 가이드면으로서 기능하지 않는다. 따라서, 2개의 정반 (12A 및 12B) 을 이간시켜 배치하더라도, 자중 소거 디바이스 (40) 를 XY평면을 따라 안내될 수 있고, 이에 의해 기판 (P) 을 Y축 방향으로 안정적인 방식으로 구동할 수 있다.
또한, 정반이 2개의 부재로 구성되어 있으므로, 정반 (12A 및 12B) 의 각각은 소형화될 수 있다. 따라서, 정반의 재료 (예컨대, 석재) 가 어렵지 않게 확보될 수 있고, 또한 정반이 어렵지 않게 가공 및 반송될 수 있다. 또한, 정반 (12A 및 12B) 이 이간되어 배치될 수 있으므로, 정반들의 사이에 X조동 스테이지 (23X) 를 이동가능한 방식으로 지지하는 베이스 프레임 (14B) 이 배치될 수 있고, 이에 의해 X조동 스테이지 (23X) 의 길이 방향으로 중앙 부분의 휨을 억제할 수 있다.
또한, 정반은, 일 방향 (예를 들어 상기 실시형태의 X축으로 상당할 방향) 으로 더 길더라도 수송 (반송) 에는 문제가 없고, 이러한 일 방향으로의 크기 증가에 대해, 본 실시형태와 유사한 장치 구성을 채용함으로써 어렵지 않게 대처할 수 있다. 또한, 일 방향으로 정반이 더 길어진 경우에는, 3개 이상의 기판 스테이지 발판 (33) 이 배치될 수 있고, 그 일방으로 배치되도록 그 일 방향으로도 복수의 정반으로 분할될 수 있다.
게다가, 인접하는 정반들 사이에 브리징되도록 배치된 판형 부재인 스텝 보드 상에서 자중 소거 디바이스 (40) 의 디바이스 본체 (60) 가 이동하는 구성이 채용되므로, 예를 들어 복수 (예컨대, 상기 실시형태에서는, 2개) 의 정반들에 대응하도록 복수의 자중 소거 디바이스들이 배치되는 경우에 비해 비용이 절감된다.
또한, 스텝 보드 (71) 가 디바이스 본체 (60) 에 추종하여 Y축 방향으로 이동하므로, 스텝 보드 (71) 가 소형화 및 경량화될 수 있다. 또한, 스텝 보드 (71) 가 구동 로프 (80a 및 80b) 에 의해 견인되는 구성이 채용되므로, 액추에이터 등을 설치하는 경우에 비해 구조가 단순화될 수 있다.
또한, 복수 (상기 실시형태에서는 2개) 의 정반 (12A 및 12B) 이, 노광 시의 스텝 방향으로 소정의 간격으로 배치되고, 보다 구체적으로, 스캔 방향으로 복수의 정반들 사이의 연결고리가 존재하지 않으므로, 스캔 동작시에는, 정반 (12A 및 12B) 의 상면이 단일의 가이드면으로서 (단일의 가이드면을 갖는 하나의 정반과 유사하게) 기능하므로, 기판 (P) 는 안정적으로 스캔 방향으로 구동될 수 있다.
또한, 상기 실시형태에서는, 2개의 정반이 스텝 방향 (Y축 방향) 으로 소정의 간격으로 배열되었지만, 이에 한정되지 않고, 예를 들어 3개 이상의 정반이 배열될 수 있다. 이 경우에는, 복수의 정반들의 각각에 베이스 패드를 배치하고, 상기 실시형태의 스텝 보드보다 Y축 방향으로 긴 스텝 보드를 복수의 베이스 패드에 브리징되도록 (즉, 복수의 정반을 걸친 상태로) 배치하는 것이 바람직하다. 또한, 상기 실시형태에서는, 스텝 보드가 자중 소거 디바이스의 디바이스 본체에 추종하는 구성이 채용되었지만, 이에 한정되지 않고, 스텝 보드는 고정될 수 있다 (이러한 경우, 상기 실시형태의 것보다 Y축 방향으로의 크기를 더 길게 할 필요가 있음). 또한, 복수의 정반은 스캔 방향 (X축 방향) 으로 소정의 거리로 배열될 수 있다.
또한, 상기 실시형태에서는, 베이스 패드가 디바이스 본체에 추종하여 Y축 방향으로 이동하는 구성이 채용되었지만, 이에 한정되지 않고, 베이스 패드를 실시형태의 것보다 크게 형성함으로써, Y축 방향으로 이동가능하지 않게 (다만, X축 방향으로는 이동가능하게) 구성될 수 있다. 또한, 상기 실시형태에서는, 베이스 패드가 리니어 모터에 의해 구동되는 구성이 채용되었지만, 스텝 보드의 경우와 유사한 방식으로, 베이스 패드가 와이어 로프 등에 의해 견인되는 구성도 또한 채용될 수 있다. 또한, 스텝 보드가 와이어 로프에 의해 당겨짐으로써 디바이스 본체에 추종하는 구성이 채용되었지만, 이에 한정되지 않고, 예를 들어 리니어 모터와 같은 액추에이터에 의해 구동될 수 있다. 게다가, 상기 실시형태에서는, 자중 소거 디바이스는, X조동 스테이지에 의해 가압됨으로써 X축 방향으로 이동하는 구성이 채용되었지만, 이에 한정되지 않고, 리니어 모터와 같은 액추에이터에 의해 X축 방향으로 구동될 수 있다. 또한, 하나의 정반 상에 복수의 베이스 패드가 배치될 수 있다.
또한, 조명광은, ArF 엑시머 레이저광 (파장 193nm) 및 KrF 엑시머 레이저광 (파장 248nm) 과 같은 자외광, 또는 F2 레이저광 (파장 157nm) 과 같은 진공 자외광일 수 있다. 또한, 조명광으로서는, 예를 들어 DFB 반도체 레이저 또는 파이버 레이저에 의해 사출되는 적외역 또는 가시역의 단일 파장 레이저빔을, 예를 들어 에르븀 (또는 에르븀과 이테르븀의 양방 모두) 으로 도프된 파이버 증폭기로 증폭하는 것, 및 비선형 광학 결정을 이용하여 자외광으로 파장 변환하는 것에 의해 획득되는 고조파도 또한 이용될 수 있다. 또한, (355nm, 266nm 의 파장을 갖는) 고체 레이저 등도 또한 이용될 수 있다.
또한, 상기 실시형태에서는, 투영 광학계 (PL) 가 복수의 투영 광학 유닛들을 구비한 멀티 렌즈 방식에 의한 투영 광학계인 경우에 대해 설명했지만, 투영 광학 유닛들의 수는 이에 한정되지 않고, 하나 이상의 투영 광학 유닛들이 존재할 수도 있다. 또한, 멀티 렌즈 방식의 투영 광학계에 한정되지 않고, 예를 들어 오프너 (Offner) 형의 대형 거울을 이용한 투영 광학계일 수 있다.
또한, 상기 실시형태에서는 투영 광학계 (PL) 로서 투영 배율이 등배율인 투영 광학계가 이용하는 경우에 대해 설명했지만, 이에 한정되지 않고, 투영 광학계는 축소계 또는 확대계 중 어느 일방일 수 있다.
또한, 상기 실시형태에서는, 광투과성의 마스크 기판상에 소정의 차광 패턴 (또는 위상 패턴·감광 패턴) 을 형성함으로써 획득되는 광투과형 마스크가 이용되었다. 이 마스크 대신에, 예를 들어 미국 특허 제6,778,257호에 개시된 바와 같이, 노광해야 할 패턴의 전자 데이터에 기초하여, 투과 패턴, 반사 패턴, 또는 발광 패턴이 형성되는 전자 마스크 (가변 성형 마스크), 또는 예를 들어, 비발광형 화상 디스플레이 소자 (공간 광변조기로도 지칭됨) 의 일 유형인 DMD (Digital Micro-mirror Device) 를 이용하는 가변 성형 마스크가 이용될 수 있다.
또한, 상기 실시형태 등에서와 마찬가지로 본 발명의 노광 장치는, 크기 (외경, 대각선 및 변 중 적어도 하나를 포함함) 가 500mm 이상의 기판, 예를 들어 액정 디스플레이 소자와 같은 플랫 패널 디스플레이 (FPD) 용의 대형 기판을 노광하는 노광 장치에 대해 적용되는 것이 특히 효과적이다. 이것은, 기판의 대형화에 대처할 수 있도록 본 발명이 이루어지고 있기 때문이다.
또한, 상기 실시형태에서는, 플레이트의 스텝-앤드-스캔 동작에 수반되는 스캔형 노광을 수행하는 투영 노광 장치에 적용되는 경우에 대해 설명했지만, 이에 한정되지 않고, 본 발명은, 투영 광학계를 이용하지 않는, 근사 방식에 의한 노광 장치에도 적용될 수 있다. 또한, 본 발명은, 스텝-앤드-리피트 방식의 노광 장치 (소위, 스테퍼) 혹은 스텝-앤드-스티치 방식의 노광 장치에도 적용될 수 있다.
또한, 노광 장치의 용도로서는 직사각형의 유리 플레이트에 액정 디스플레이 소자 패턴이 전사되는 액정 디스플레이 소자용의 노광 장치에 한정되지 않고, 본 발명은, 예를 들어 반도체를 제조하기 위한 노광 장치, 및 박막 자기 헤드, 마이크로 머신, DNA 칩 등을 제조하기 위한 노광 장치에도 광범위하게 적용될 수 있다. 또한, 반도체 소자와 같은 마이크로 디바이스 뿐만이 아니라, 광노광 장치, EUV 노광 장치, X선 노광 장치, 전자빔 노광 장치 등에서 사용되는 마스크 또는 레티클을 제조하기 위해, 유리 기판, 실리콘 웨이퍼 등에 회로 패턴이 전사되는 노광 장치에도 본 발명이 적용될 수 있다. 또한, 노광 대상이 되는 물체는 유리 플레이트에 한정되지 않고, 예를 들어 웨이퍼, 세라믹 기판, 필름 부재, 또는 마스크 블랭크와 같은 다른 물체일 수 있다. 또한, 본 발명은, 실리콘 웨이퍼 등에 회로 패턴을 전사하는 노광 장치로서, 예를 들어 미국 특허출원 공개 제 2005/0259234호 등에 개시되는, 투영 광학계와 웨이퍼 사이의 공간이 액체로 채워지는 액침형 노광 장치와 같은 노광 장치에도 적용될 수 있다.
또한, 예를 들어 PCT 국제공개 제2001/035168호에 개시된 바와 같이, 간섭 무늬를 웨이퍼 상에 형성함으로써, 웨이퍼 상에 라인-앤드-스페이스 패턴들을 형성하는 노광 장치 (리소그래피 시스템) 에도 본 발명이 적용될 수 있다.
또한, 본 발명은, 노광 장치에 한정되지 않고, 예를 들어 잉크젯 방식에 의한 기능성 액체 부여 디바이스를 구비한 소자 제조 장치에도 적용될 수 있다.
또한, 노광 장치 등에 관련된, 본 설명에서 인용된 모든 공개물, PCT 국제출원공개, 미국 특허출원, 및 미국 특허의 상기 개시물들은, 본 명세서에 참조로 각각 통합되어 있다.
- 디바이스 제조 방법
다음으로, 상기 실시형태의 노광 장치 (10) 를 리소그래피 공정에서 사용한 마이크로 디바이스의 제조 방법에 대해 설명한다. 상기 실시형태의 노광 장치 (10) 에서는, 플레이트 (유리 기판) 상에 (회로 패턴 또는 전극 패턴과 같은) 소정의 패턴을 형성함으로써, 마이크로 디바이스로서의 액정 디스플레이 소자가 획득될 수 있다.
- 패턴 형성 공정
우선, 전술한 노광 장치 (10) 를 이용하여, 패턴 이미지가 (레지스트로 도포된 유리 기판과 같은) 감광성 기판에 형성되는, 소위, 광리소그래피 공정이 실행된다. 이 광리소그래피 공정에서, 감광성 기판상에는 많은 전극 등을 포함하는 소정의 패턴이 형성된다. 그 후, 노광된 기판은, 현상 공정, 에칭 공정 및 레지스트 제거 공정과 같은 각 공정을 거치는 것에 의해, 기판상에 소정의 패턴이 형성된다.
- 컬러 필터 형성 공정
다음으로, R (적색), G (녹색) 및 B (청색) 에 대응하는 3개의 도트의 수많은 세트들이 매트릭스 형상으로 배열거나, 또는 R, G 및 B 의 3개의 스트라이프의 필터의 복수 세트가 수평 스캔선 방향으로 배열되는 컬러 필터가 형성된다.
- 셀 조립 공정
다음으로, 패턴 형성 공정에서 획득되는 소정의 패턴을 갖는 기판, 컬러 필터 형성 공정에서 획득되는 컬러 필터 등을 이용하여, 액정 패널 (액정 셀) 이 조립된다. 예를 들어, 패턴 형성 공정에서 획득되는 소정의 패턴을 갖는 기판과 컬러 필터 형성 공정에서 획득되는 컬러 필터 사이에 액정을 주입함으로써, 액정 패널 (액정 셀) 이 제조된다.
- 모듈 조립 공정
그 후, 조립된 액정 패널 (액정 셀) 의 디스플레이 동작을 수행하게 하는 전기 회로, 및 백라이트와 같은 각각의 컴포넌트들을 장착함으로써 액정 디스플레이 소자가 완성된다.
이 경우, 패턴 형성 공정에서, 상기 실시형태의 노광 장치를 이용하여 고 스루풋 및 고 정밀도로 플레이트의 노광이 수행되므로, 결과적으로, 액정 디스플레이 소자의 생산성이 향상될 수 있다.
산업상 이용가능성
전술한 바와 같이, 본 발명의 이동체 장치는, 소정의 2차원 평면에 평행한 평면을 따라 이동체를 구동하기에 적합하다. 또한, 본 발명의 노광 장치는, 에너지 빔으로 물체를 조사함으로써 물체를 노광하기에 적합하다. 또한, 본 발명의 디바이스 제조 방법은, 마이크로 디바이스의 생산에 적합하다.
Claims (1)
- 기판을 유지하는 기판 유지 부재와,
상기 기판 유지 부재를 하방으로부터 지지하고, 상기 기판 유지 부재에 대해 상대 이동 가능한 제 1 지지 부재와,
상기 제 1 지지 부재를 하방으로부터 지지하는 제 2 지지 부재와,
상기 제 1 지지 부재가 상기 기판 유지 부재를 하방으로부터 지지한 상태에서, 상기 제 1 지지 부재를 상기 제 2 지지 부재에 대해 제 1 방향으로 상대 이동시키는 제 1 구동부와,
상기 제 2 지지 부재가 상기 제 1 지지 부재를 하방으로부터 지지한 상태에서, 제 3 지지 부재 상의 상기 제 2 지지 부재를 제 2 방향으로 이동시키는 제 2 구동부와,
상기 제 2 지지 부재를 지지하는 제 1 베이스와,
상기 제 1 방향에 관하여 상기 제 1 베이스와는 상이한 위치에 형성되어, 상기 제 1 구동부와 상기 제 2 구동부를 지지하는 제 2 베이스를 구비하는 이동체 장치.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15741509P | 2009-03-04 | 2009-03-04 | |
| US61/157,415 | 2009-03-04 | ||
| US12/714,733 | 2010-03-01 | ||
| US12/714,733 US8659746B2 (en) | 2009-03-04 | 2010-03-01 | Movable body apparatus, exposure apparatus and device manufacturing method |
| PCT/JP2010/053715 WO2010101267A1 (en) | 2009-03-04 | 2010-03-02 | Movable body apparatus, exposure apparatus and device manufacturing method |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020197009500A Division KR102108997B1 (ko) | 2009-03-04 | 2010-03-02 | 이동체 장치, 노광 장치, 및 디바이스 제조 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200051842A true KR20200051842A (ko) | 2020-05-13 |
Family
ID=42678581
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177001942A KR101967135B1 (ko) | 2009-03-04 | 2010-03-02 | 이동체 장치, 노광 장치, 및 디바이스 제조 방법 |
| KR1020117022426A KR101700929B1 (ko) | 2009-03-04 | 2010-03-02 | 이동체 장치, 노광 장치, 및 디바이스 제조 방법 |
| KR1020207012812A KR20200051842A (ko) | 2009-03-04 | 2010-03-02 | 이동체 장치, 노광 장치, 및 디바이스 제조 방법 |
| KR1020197009500A KR102108997B1 (ko) | 2009-03-04 | 2010-03-02 | 이동체 장치, 노광 장치, 및 디바이스 제조 방법 |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177001942A KR101967135B1 (ko) | 2009-03-04 | 2010-03-02 | 이동체 장치, 노광 장치, 및 디바이스 제조 방법 |
| KR1020117022426A KR101700929B1 (ko) | 2009-03-04 | 2010-03-02 | 이동체 장치, 노광 장치, 및 디바이스 제조 방법 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020197009500A KR102108997B1 (ko) | 2009-03-04 | 2010-03-02 | 이동체 장치, 노광 장치, 및 디바이스 제조 방법 |
Country Status (5)
| Country | Link |
|---|---|
| US (6) | US8659746B2 (ko) |
| JP (2) | JP5636696B2 (ko) |
| KR (4) | KR101967135B1 (ko) |
| TW (5) | TWI633397B (ko) |
| WO (1) | WO2010101267A1 (ko) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8659746B2 (en) | 2009-03-04 | 2014-02-25 | Nikon Corporation | Movable body apparatus, exposure apparatus and device manufacturing method |
| US8988655B2 (en) * | 2010-09-07 | 2015-03-24 | Nikon Corporation | Exposure apparatus, movable body apparatus, flat-panel display manufacturing method, and device manufacturing method |
| JP2012089537A (ja) * | 2010-10-15 | 2012-05-10 | Nikon Corp | ステージ装置、基板貼り合せ装置、積層半導体装置の製造方法及び積層半導体装置 |
| JP5958692B2 (ja) * | 2012-04-04 | 2016-08-02 | 株式会社ニコン | 移動体装置、露光装置、フラットパネルディスプレイの製造方法、デバイス製造方法、及び移動体の駆動方法並びに露光方法 |
| JP5910992B2 (ja) * | 2012-04-04 | 2016-04-27 | 株式会社ニコン | 移動体装置、露光装置、フラットパネルディスプレイの製造方法、及びデバイス製造方法 |
| NL2010679A (en) * | 2012-05-23 | 2013-11-26 | Asml Netherlands Bv | Lithographic apparatus and device manufacturing method. |
| CN103472678B (zh) * | 2012-06-08 | 2015-07-22 | 上海微电子装备有限公司 | 光刻机及应用于光刻机中的工件台系统 |
| JP6086299B2 (ja) * | 2012-11-13 | 2017-03-01 | 株式会社ニコン | 移動体装置、露光装置、フラットパネルディスプレイの製造方法、及びデバイス製造方法 |
| DE102013011873B4 (de) * | 2013-07-17 | 2015-10-08 | Mecatronix Ag | Positioniervorrichtung und Verfahren zum Bewegen eines Substrats |
| US10048600B2 (en) * | 2014-03-28 | 2018-08-14 | Nikon Corporation | Movable body apparatus, exposure apparatus, manufacturing method of flat panel display, device manufacturing method, and movable body drive method |
| KR101715785B1 (ko) * | 2014-12-05 | 2017-03-13 | 프로미스 주식회사 | Fpd용 노광장치 |
| CN104483815B (zh) * | 2014-12-08 | 2016-05-11 | 上海核电装备焊接及检测工程技术研究中心(筹) | 一种射线源对中支撑装置及其固定射线源装置的方法 |
| JP6606479B2 (ja) * | 2016-08-08 | 2019-11-13 | 株式会社ブイ・テクノロジー | マスク保持装置 |
| NL2020346A (en) * | 2017-02-27 | 2018-09-03 | Asml Netherlands Bv | Lithographic apparatus, lithographic projection apparatus and device manufacturing method |
| JP6999155B2 (ja) * | 2017-08-29 | 2022-01-18 | 株式会社ナチュラレーザ・ワン | 原稿圧着板開閉装置およびこれを備えた事務機器 |
| JP6917848B2 (ja) * | 2017-09-26 | 2021-08-11 | 株式会社Screenホールディングス | ステージ駆動装置および描画装置 |
| CN108161728A (zh) * | 2017-12-26 | 2018-06-15 | 北京半导体专用设备研究所(中国电子科技集团公司第四十五研究所) | 抛光回转工作台及抛光装置 |
| CN109765753A (zh) * | 2019-01-30 | 2019-05-17 | 广东华恒智能科技有限公司 | 一种全自动油墨曝光机 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008129762A1 (ja) | 2007-03-05 | 2008-10-30 | Nikon Corporation | 移動体装置、パターン形成装置及びパターン形成方法、デバイス製造方法、移動体装置の製造方法、並びに移動体駆動方法 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5684856A (en) * | 1991-09-18 | 1997-11-04 | Canon Kabushiki Kaisha | Stage device and pattern transfer system using the same |
| JPH05329727A (ja) | 1992-05-26 | 1993-12-14 | Nikon Corp | ステージ装置 |
| JP3548353B2 (ja) * | 1996-10-15 | 2004-07-28 | キヤノン株式会社 | ステージ装置およびこれを用いた露光装置ならびにデバイス製造方法 |
| US6408045B1 (en) * | 1997-11-11 | 2002-06-18 | Canon Kabushiki Kaisha | Stage system and exposure apparatus with the same |
| JP3745167B2 (ja) * | 1998-07-29 | 2006-02-15 | キヤノン株式会社 | ステージ装置、露光装置およびデバイス製造方法ならびにステージ駆動方法 |
| US6296734B1 (en) * | 1999-07-08 | 2001-10-02 | International Business Machines Corporation | Concentrated UV light curing of adhesive for pivot applications |
| WO2001035168A1 (en) | 1999-11-10 | 2001-05-17 | Massachusetts Institute Of Technology | Interference lithography utilizing phase-locked scanning beams |
| JP2001215718A (ja) * | 1999-11-26 | 2001-08-10 | Nikon Corp | 露光装置及び露光方法 |
| US20020075467A1 (en) | 2000-12-20 | 2002-06-20 | Nikon Corporation | Exposure apparatus and method |
| TW529172B (en) * | 2001-07-24 | 2003-04-21 | Asml Netherlands Bv | Imaging apparatus |
| US7271879B2 (en) * | 2001-09-24 | 2007-09-18 | Agency For Science, Technology And Research | Decoupled planar positioning system |
| KR20130010039A (ko) * | 2002-12-10 | 2013-01-24 | 가부시키가이샤 니콘 | 노광 장치 및 디바이스 제조 방법 |
| TWI338323B (en) * | 2003-02-17 | 2011-03-01 | Nikon Corp | Stage device, exposure device and manufacguring method of devices |
| JP2004260116A (ja) | 2003-02-27 | 2004-09-16 | Nikon Corp | ステージ装置、露光装置、及びデバイス製造方法 |
| JP2005203567A (ja) * | 2004-01-15 | 2005-07-28 | Canon Inc | 駆動装置、露光装置及びデバイス製造方法 |
| US7221433B2 (en) * | 2004-01-28 | 2007-05-22 | Nikon Corporation | Stage assembly including a reaction assembly having a connector assembly |
| KR101119814B1 (ko) * | 2004-06-07 | 2012-03-06 | 가부시키가이샤 니콘 | 스테이지 장치, 노광 장치 및 노광 방법 |
| JP4550494B2 (ja) * | 2004-06-22 | 2010-09-22 | 大日本印刷株式会社 | Xyステージ装置 |
| JP2006086442A (ja) * | 2004-09-17 | 2006-03-30 | Nikon Corp | ステージ装置及び露光装置 |
| JP2006253572A (ja) * | 2005-03-14 | 2006-09-21 | Nikon Corp | ステージ装置、露光装置、及びデバイス製造方法 |
| US7956876B2 (en) | 2005-03-15 | 2011-06-07 | Sharp Kabushiki Kaisha | Drive method of display device, drive unit of display device, program of the drive unit and storage medium thereof, and display device including the drive unit |
| CN100514193C (zh) * | 2005-03-29 | 2009-07-15 | 株式会社尼康 | 曝光装置、曝光装置的制造方法以及微元件的制造方法 |
| JP2007073688A (ja) * | 2005-09-06 | 2007-03-22 | Shinko Electric Co Ltd | Xyステージ装置及びその製造方法 |
| JP5505871B2 (ja) * | 2008-03-07 | 2014-05-28 | 株式会社ニコン | 移動体装置及び露光装置 |
| US20100030384A1 (en) * | 2008-07-29 | 2010-02-04 | Technical Manufacturing Corporation | Vibration Isolation System With Design For Offloading Payload Forces Acting on Actuator |
| US8659746B2 (en) * | 2009-03-04 | 2014-02-25 | Nikon Corporation | Movable body apparatus, exposure apparatus and device manufacturing method |
-
2010
- 2010-03-01 US US12/714,733 patent/US8659746B2/en active Active
- 2010-03-02 JP JP2010045208A patent/JP5636696B2/ja active Active
- 2010-03-02 KR KR1020177001942A patent/KR101967135B1/ko active IP Right Grant
- 2010-03-02 KR KR1020117022426A patent/KR101700929B1/ko active IP Right Grant
- 2010-03-02 KR KR1020207012812A patent/KR20200051842A/ko not_active Application Discontinuation
- 2010-03-02 KR KR1020197009500A patent/KR102108997B1/ko active IP Right Grant
- 2010-03-02 WO PCT/JP2010/053715 patent/WO2010101267A1/en active Application Filing
- 2010-03-03 TW TW106111116A patent/TWI633397B/zh active
- 2010-03-03 TW TW109110285A patent/TW202028889A/zh unknown
- 2010-03-03 TW TW107124972A patent/TWI694314B/zh active
- 2010-03-03 TW TW104126514A patent/TWI584079B/zh active
- 2010-03-03 TW TW099106064A patent/TWI501044B/zh active
-
2014
- 2014-01-15 US US14/155,914 patent/US9170504B2/en active Active
- 2014-01-27 JP JP2014011949A patent/JP6016198B2/ja active Active
-
2015
- 2015-09-22 US US14/861,293 patent/US9500963B2/en active Active
-
2016
- 2016-10-27 US US15/335,856 patent/US9977345B2/en active Active
-
2018
- 2018-04-19 US US15/957,297 patent/US10514616B2/en active Active
-
2019
- 2019-11-22 US US16/692,406 patent/US20200096878A1/en not_active Abandoned
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008129762A1 (ja) | 2007-03-05 | 2008-10-30 | Nikon Corporation | 移動体装置、パターン形成装置及びパターン形成方法、デバイス製造方法、移動体装置の製造方法、並びに移動体駆動方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20190038956A (ko) | 2019-04-09 |
| TW201727389A (zh) | 2017-08-01 |
| US8659746B2 (en) | 2014-02-25 |
| JP6016198B2 (ja) | 2016-10-26 |
| JP5636696B2 (ja) | 2014-12-10 |
| KR101700929B1 (ko) | 2017-02-13 |
| US20180239264A1 (en) | 2018-08-23 |
| JP2010206205A (ja) | 2010-09-16 |
| US20140125961A1 (en) | 2014-05-08 |
| US20170045829A1 (en) | 2017-02-16 |
| TW201102764A (en) | 2011-01-16 |
| TWI694314B (zh) | 2020-05-21 |
| TWI633397B (zh) | 2018-08-21 |
| TW201841076A (zh) | 2018-11-16 |
| KR20110133570A (ko) | 2011-12-13 |
| US9977345B2 (en) | 2018-05-22 |
| TWI584079B (zh) | 2017-05-21 |
| US20200096878A1 (en) | 2020-03-26 |
| JP2014112247A (ja) | 2014-06-19 |
| US10514616B2 (en) | 2019-12-24 |
| TW202028889A (zh) | 2020-08-01 |
| US20160011524A1 (en) | 2016-01-14 |
| KR20170012584A (ko) | 2017-02-02 |
| WO2010101267A1 (en) | 2010-09-10 |
| TW201600938A (zh) | 2016-01-01 |
| US20100227277A1 (en) | 2010-09-09 |
| KR102108997B1 (ko) | 2020-05-11 |
| TWI501044B (zh) | 2015-09-21 |
| KR101967135B1 (ko) | 2019-04-09 |
| US9500963B2 (en) | 2016-11-22 |
| US9170504B2 (en) | 2015-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102108997B1 (ko) | 이동체 장치, 노광 장치, 및 디바이스 제조 방법 | |
| JP6904384B2 (ja) | 移動体装置及び物体の移動方法、露光装置及び露光方法、並びにフラットパネルディスプレイの製造方法及びデバイス製造方法 | |
| KR101547784B1 (ko) | 이동체 장치, 패턴 형성 장치 및 패턴 형성 방법, 디바이스 제조 방법, 이동체 장치의 제조 방법, 및 이동체 구동 방법 | |
| WO2010122788A1 (ja) | 移動体装置、露光装置、露光方法、及びデバイス製造方法 | |
| JP2011244608A (ja) | リニアモータ、移動体装置、露光装置、デバイス製造方法、及びフラットパネルディスプレイの製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A107 | Divisional application of patent | ||
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |